| Computer Modeling in Engineering & Sciences |
DOI: 10.32604/cmes.2021.014739
ARTICLE
An Efficient Meshless Method for Hyperbolic Telegraph Equations in (1 + 1) Dimensions
1College of Mathematics and Statistics, Xuzhou University of Technology, Xuzhou, 221018, China
2College of Mathematics, Huaibei Normal University, Huaibei, 235000, China
3Department of Mathematics, University of Swabi, Swabi, 25000, Pakistan
4Department of Basic Sciences, University of Engineering and Technology, Peshawar, 25000, Pakistan
5College of Mathematics, Qingdao University, Qingdao, 266071, China
*Corresponding Author: Enran Hou. Email: houenran@163.com
Received: 26 October 2020; Accepted: 16 April 2021
Abstract: Numerical solutions of the second-order one-dimensional hyperbolic telegraph equations are presented using the radial basis functions. The purpose of this paper is to propose a simple novel direct meshless scheme for solving hyperbolic telegraph equations. This is fulfilled by considering time variable as normal space variable. Under this scheme, there is no need to remove time-dependent variable during the whole solution process. Since the numerical solution accuracy depends on the condition of coefficient matrix derived from the radial basis function method. We propose a simple shifted domain method, which can avoid the full-coefficient interpolation matrix easily. Numerical experiments performed with the proposed numerical scheme for several second-order hyperbolic telegraph equations are presented with some discussions.
Keywords: Radial basis functions; telegraph equation; shifted domain method; meshless method
The telegraph equation, which has been used to describe phenomena in various fields, belongs to the hyperbolic partial differential equation scope. For example, the telegraph equation in (1 + 1) dimensions can model the vibrations of structures, the digital propagation and also has applications in the other fields [1–3]. Several methods are used to get the analytical/exact solutions of the telegraph equations [4–6]. However, it is almost impossible to get the analytical solutions for relatively complex problems. Thus, numerical approximations to the telegraph equation is a better choice. Some numerical methods have been developed and compared to deal with the hyperbolic telegraph equations [7–9].
Especially, there are several numerical methods concentrate on the second-order 1D linear hyperbolic telegraph equations. For example, Mohanty et al. [10] investigated an unconditionally stable schemes for solving the hyperbolic equations. Based on the finite difference approximation, Dehghan et al. [11–13] presented several methods to simulate the linear hyperbolic telegraph equations. Lakestani et al. [14] used interpolating scaling function technique to solve the 1D hyperbolic telegraph equation. The boundary integral equation accompanied with the dual reciprocity method is used to solve the hyperbolic telegraph equations by Dehghan et al. [15]. Pekmen and Tezer-Sezgin et al. [16] and Jiwari et al. [17] applied the differential quadrature method for the approximate solution of hyperbolic telegraph equations in one-and two space-dimensions. Zerarka et al. [18] considered the 2D generalized differential quadrature method for solving the hyperbolic telegraph equation later. The homotopy analysis method [19] is used to obtain the approximate analytical solution solutions of the second-order 1D linear hyperbolic telegraph equations. A pseudospectral method is proposed by Elgindy [20] for the second-order 1D hyperbolic telegraph equations. The B-spline collocation method is improved by Mittal et al. [21] to get the numerical solutions of the second order 1D hyperbolic telegraph equations. These numerical techniques are based on two-level difference or integral approximations.
Based on the above-mentioned investigations, we propose a direct meshless scheme with one-level approximation for the second-order 1D linear hyperbolic telegraph equations. This is fulfilled by considering time variable as normal space variable. There is no need to remove time-dependent variable during the whole solution process. Under this scheme, we can solve the hyperbolic telegraph equations in a direct way. The rest paper is organized as follows. The formulation of the direct radial basis function is briefly introduced with the methodology for the hyperbolic telegraph equations in Section 2. To cope with the full coefficient matrix derived from the radial basis function method, we propose a simple shifted domain method in Section 3. Section 4 presented some numerical examples to validate the applicability of the proposed direct meshless scheme. Finally, some conclusions are given in Section 5.
2 The Direct Radial Basis Function
The general mathematical formulation of second-order linear hyperbolic telegraph equation in (1 + 1) dimensions is
in terms with the initial condition
and boundary conditions
Here, the coefficient
Almost all numerical techniques for Eqs. (1)–(3) are based on the two-level approximations, most of which are based on the finite difference approximations. Here, we propose a direct collocation scheme by using radial basis function (RBF) under Euclidean space.
2.1 Direct Radial Basis Function
As is known to all, the traditional RBF methods are mostly used to solve 2D or higher dimensional problems. However, there is only one space variable
The
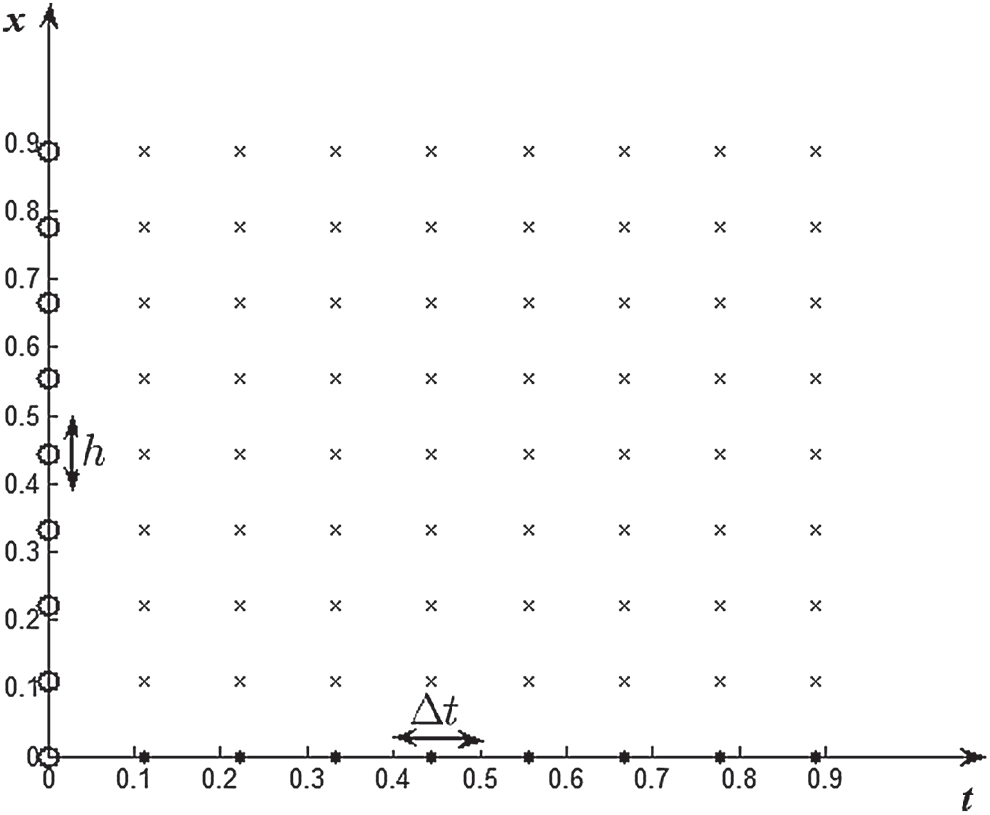
Figure 1: Configuration of the space-time coordinate
Actually, there is another definition of not radial nonmetric space-time radial basis functions with non-geometrical relationship between the space and the time. More details can be found in [22–24].
2.2 Methodology for Hyperbolic Telegraph Equations
According to the definition of DRBF, the above-mentioned Eqs. (1)–(3) can be solved directly in a one level approximation. More specifically, the numerical solution of a function
We should seek for the unknown coefficients
The interpolation scheme upon which the Eqs. (1)–(3) collocation is based is as below:
with
Here, we use
where
It should be noted that for a relatively large physical domain (with large
The procedure of the SDM is shown by the above-mentioned physical domain
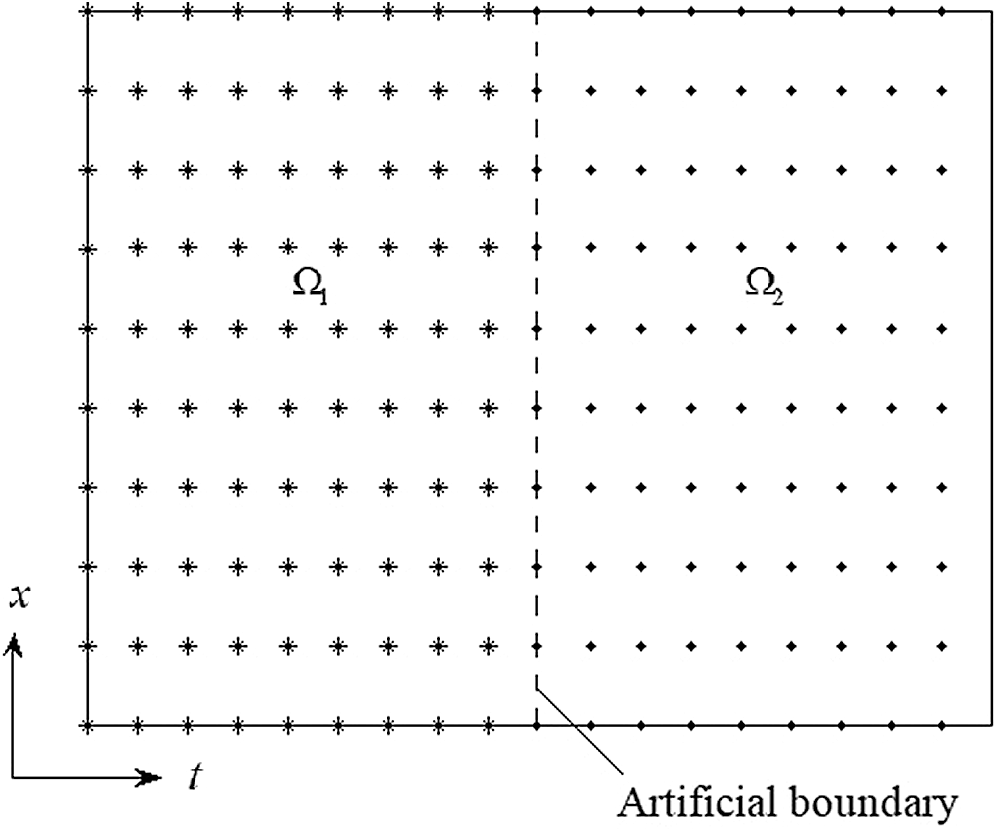
Figure 2: Configuration of the shifted domain in the horizontal direction
This procedure is same as presented in the above-mentioned physical domain
where
For the other cases, the configuration of the shifted domain in the horizontal direction
In this section, three examples are considered to validate the DRBF. For fair comparison with the other numerical methods, we use the maximum absolute error (MAE), absolute error and root mean square error (RMSE). The RMSE is defined as [25,26]
where
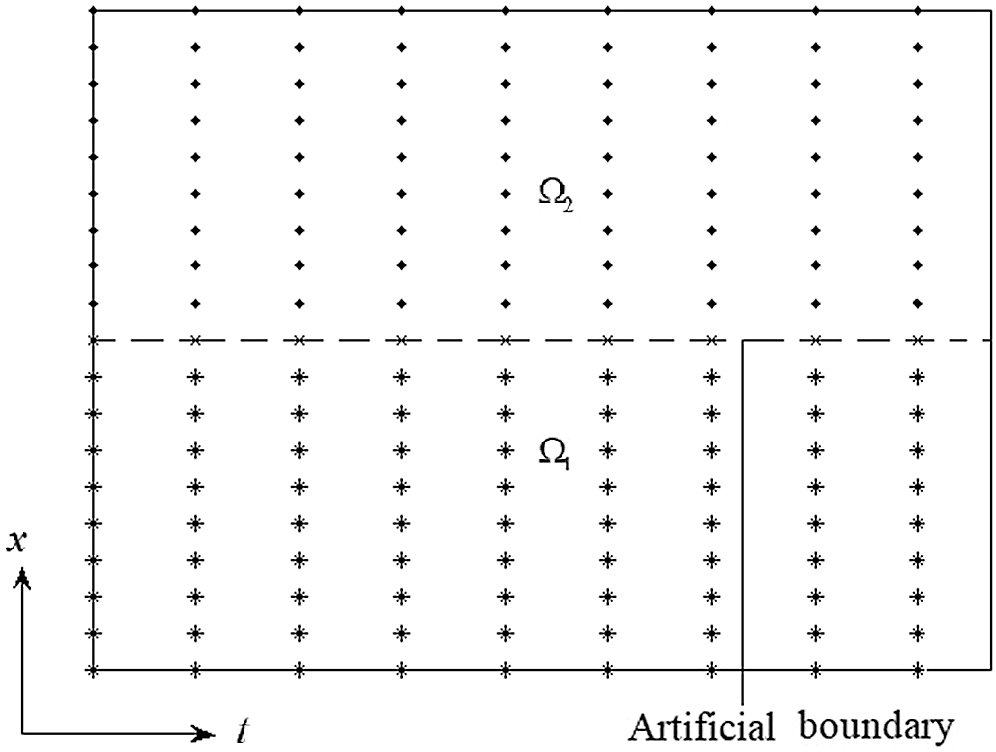
Figure 3: Configuration of the shifted domain in the vertical direction
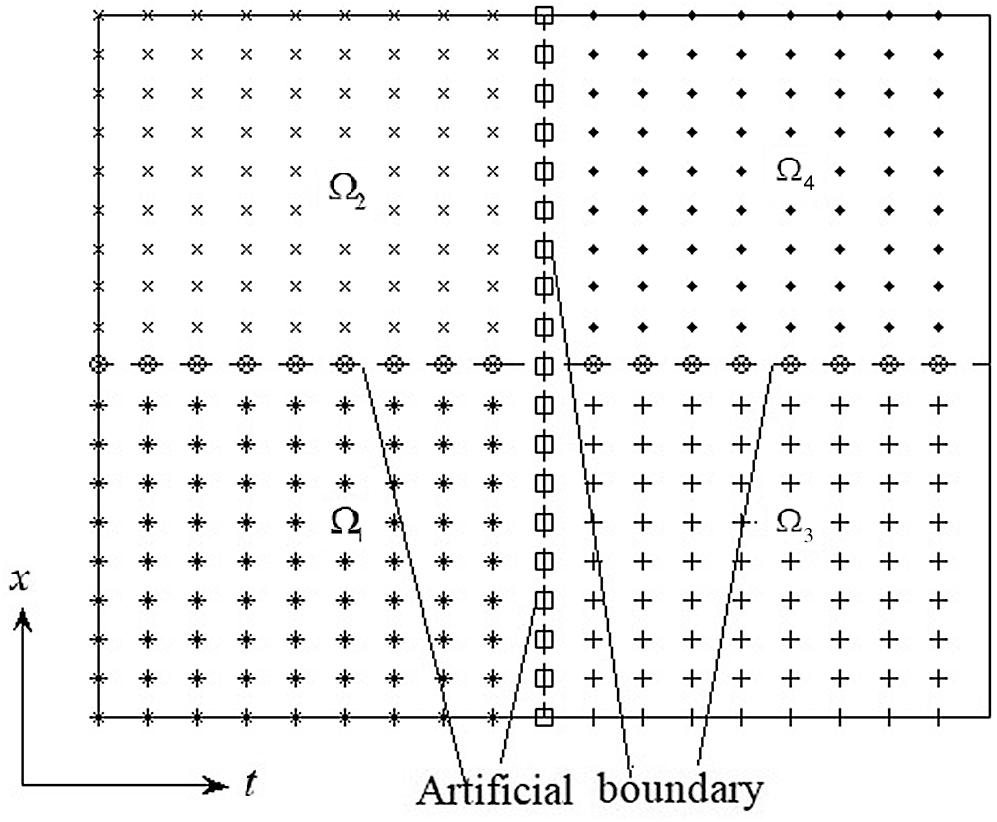
Figure 4: Configuration of the shifted domain in both directions
In order to investigate the DRBF method with the shifted domain method, we consider the hyperbolic telegraph Eq. (1) with the initial conditions
and boundary condition
The corresponding coefficients are
The source term is
In this example, the physical domain
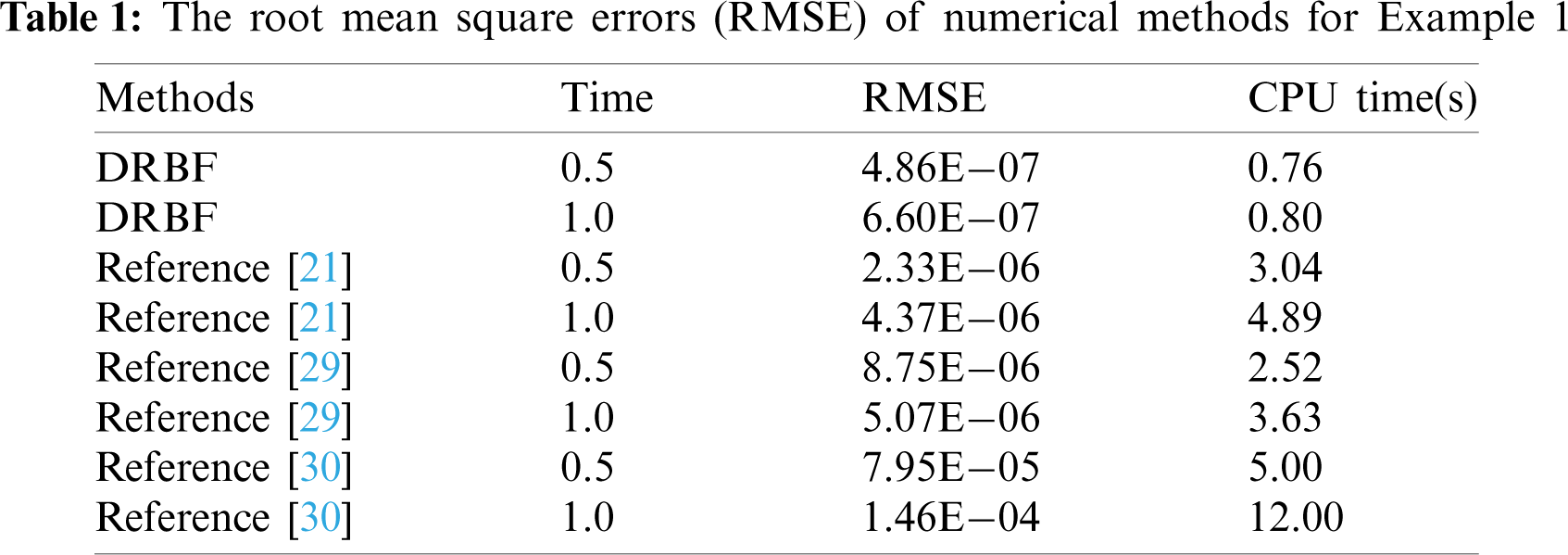
For different mesh sizes
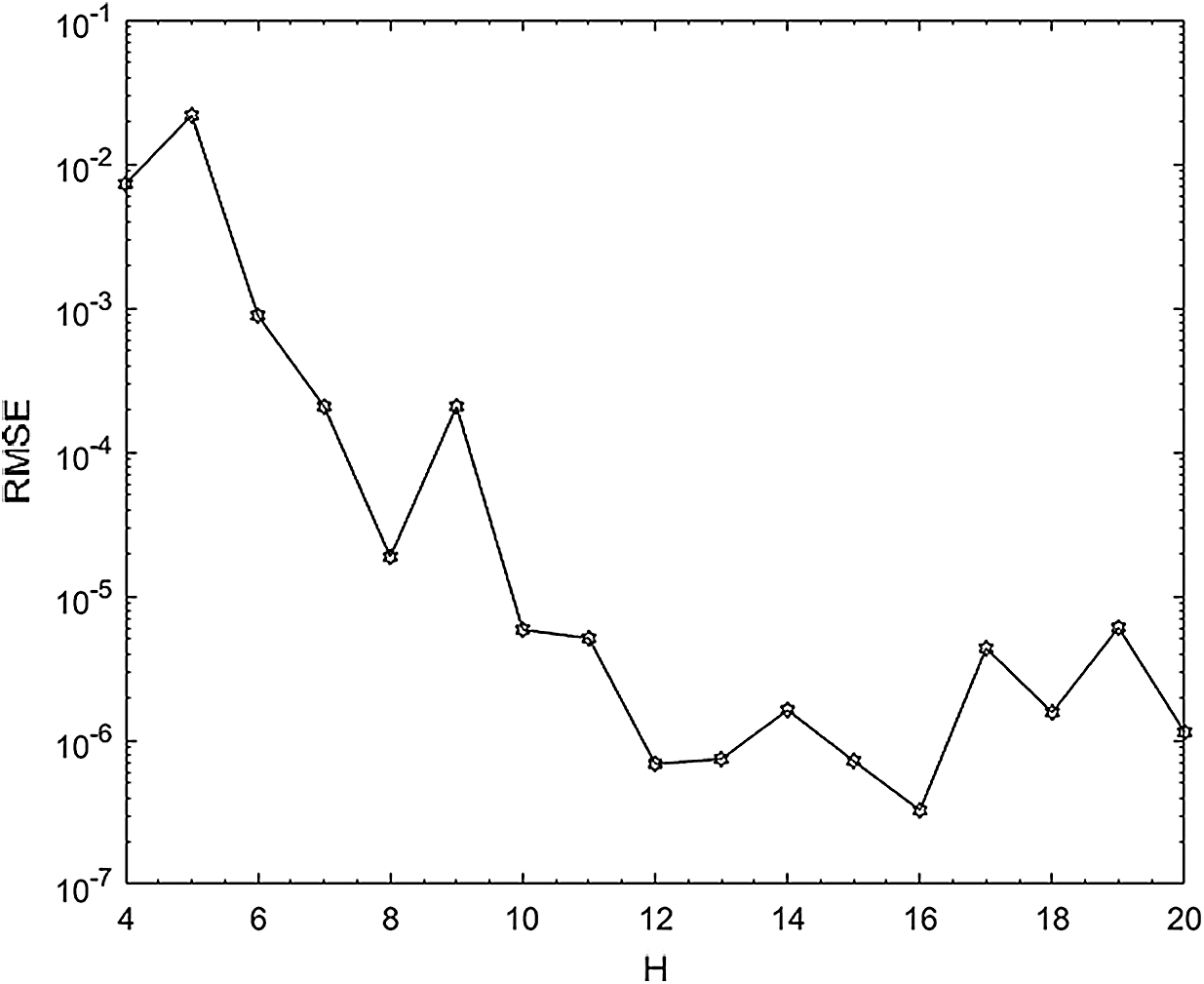
Figure 5: Root mean square error curve for example 1 at time
In order to see the performance of the DRBF with different coefficients, we consider the hyperbolic telegraph Eq. (1) with the corresponding initial conditions
and boundary condition
The corresponding analytical/exact solution
with source term
For fair comparison with the other methods in [31–33], we consider the maximum absolute errors (MAE) in this example. For space fineness
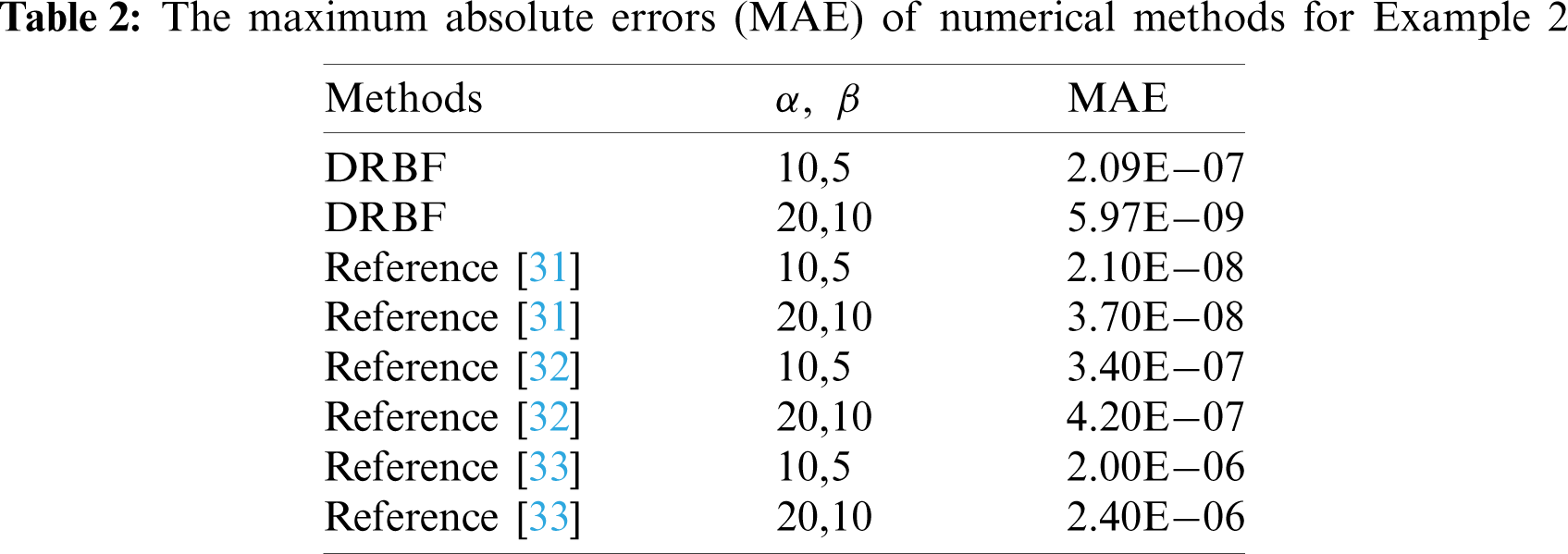
In order to see the difference between the exact and DRBF approximate solutions, Fig. 6 shows the configuration for the larger coefficients
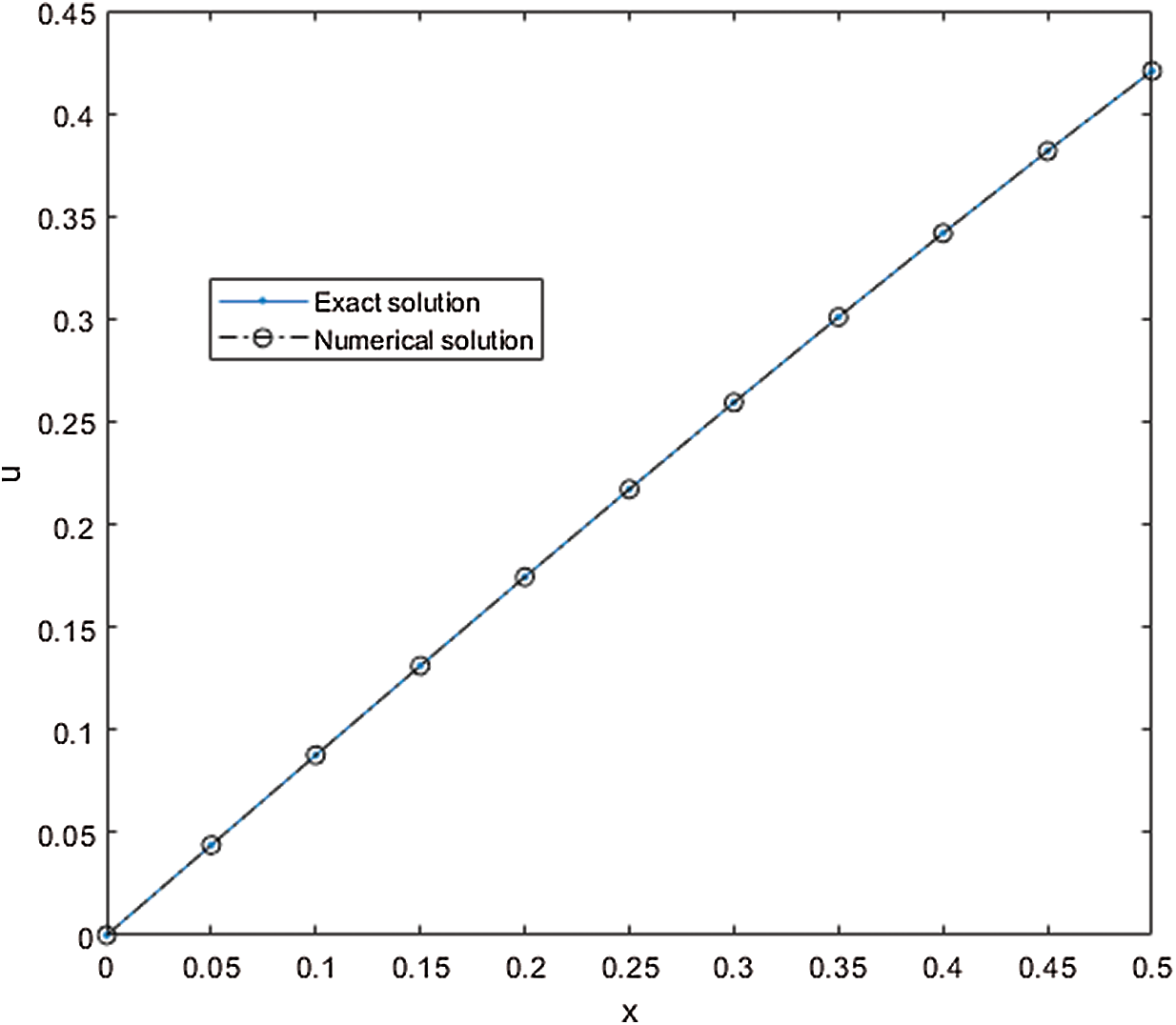
Figure 6: Exact and DRBF approximate solutions for Example 2 at time
A new direct meshless scheme is presented for the second-order hyperbolic telegraph equations in (1 + 1) dimensions. The present numerical procedure, in which the time variable is considered as normal space variable, is based on the time-dependent radial basis function. There is no need to remove time-dependent variable during the whole solution process. Besides, a simple shifted domain method is proposed to cope with the solution accuracy related to the ill-conditioned coefficient matrix. From the numerical results in Section 4, we find that the proposed meshless method is superior to the other numerical methods. Besides, the direct meshless method can be extended to solve nonlinear problems with Newton iterative method considered. The DRBF with the shifted domain method is promising in dealing with the other types of time-dependent problems, fractional problems [34–36] as well as developing a parallel algorithm for large-scale problems.
Availability of Data and Materials: The data and material used to support the findings of this study are available from the corresponding author upon request.
Funding Statement: The first author is supported by the Natural Science Foundation of Anhui Province (Project No. 1908085QA09) and the University Natural Science Research Project of Anhui Province (Project Nos. KJ2019A0591 & KJ2020B06).
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. Doha, E. H., Hafez, R. M., Youssri, Y. H. (2019). Shifted Jacobi spectral-Galerkin method for solving hyperbolic partial differential equations. Computers & Mathematics with Applications, 78(3), 889–904. DOI 10.1016/j.camwa.2019.03.011. [Google Scholar] [CrossRef]
2. Youssri, Y. H., Hafez, R. M. (2019). Exponential Jacobi spectral method for hyperbolic partial differential equations. Mathematical Sciences, 13(4), 347–354. DOI 10.1007/s40096-019-00304-w. [Google Scholar] [CrossRef]
3. Yuzba, S., Karacaylr, M. (2018). A Galerkin-type method to solve one-dimensional telegraph equation using collocation points in initial and boundary conditions. International Journal of Computational Methods, 15(5), 1850031. DOI 10.1142/S0219876218500317. [Google Scholar] [CrossRef]
4. Biazar, J., Eslami, M. (2010). Analytic solution for telegraph equation by differential transform method. Physics Letters A, 374(29), 2904–2906. DOI 10.1016/j.physleta.2010.05.012. [Google Scholar] [CrossRef]
5. Soltanalizadeh, B. (2011). Differential transformation method for solving one-space-dimensional telegraph equation. Computational & Applied Mathematics, 30(3), 639–653. DOI 10.1590/S1807-03022011000300009. [Google Scholar] [CrossRef]
6. Raftari, B., Yildirim, A. (2012). Analytical solution of second-order hyperbolic telegraph equation by variational iteration and homotopy perturbation methods. Results in Mathematics, 61(1–2), 13–28. DOI 10.1007/s00025-010-0072-y. [Google Scholar] [CrossRef]
7. Yao, H. M. (2011). Reproducing kernel method for the solution of nonlinear hyperbolic telegraph equation with an integral condition. Numerical Methods for Partial Differential Equations, 27(4), 867–886. DOI 10.1002/num.20558. [Google Scholar] [CrossRef]
8. Yao, H. M., Lin, Y. Z. (2011). New algorithm for solving a nonlinear hyperbolic telegraph equation with an integral condition. International Journal for Numerical Methods in Biomedical Engineering, 27(10), 1558–1568. DOI 10.1002/cnm.1376. [Google Scholar] [CrossRef]
9. Lin, J., He, Y., Reutskiy, S. Y., Lu, J. (2018). An effective semi-analytical method for solving telegraph equation with variable coefficients. European Physical Journal Plus, 133(7), 290. DOI 10.1140/epjp/i2018-12104-1. [Google Scholar] [CrossRef]
10. Mohanty, R. K., Jain, M. K. (2001). An unconditionally stable alternating direction implicit scheme for the two space dimensional linear hyperbolic equation. Numerical Methods for Partial Differential Equations, 17(6), 684–688. DOI 10.1002/num.1034. [Google Scholar] [CrossRef]
11. Mohebbi, A., Dehghan, M. (2008). Higher order compact solution of one space-dimensional linear hyperbolic equation. Numerical Methods for Partial Differential Equations, 24(5), 1222–1235. DOI 10.1002/num.20313. [Google Scholar] [CrossRef]
12. Dehghan, M., Lakestani, M. (2009). The use of Chebyshev cardinal functions for solution of the second-order one dimensional telegraph equation. Numerical Methods for Partial Differential Equations, 25(4), 931–938. DOI 10.1002/num.20382. [Google Scholar] [CrossRef]
13. Saadatmandi, A., Dehghan, M. (2010). Numerical solution of hyperbolic telegraph equation using the Chebyshev Tau method. Numerical Methods for Partial Differential Equations, 26(1), 239–252. DOI 10.1002/num.20442. [Google Scholar] [CrossRef]
14. Lakestani, M., Saray, B. N. (2010). Numerical solution of telegraph equation using interpolating scaling functions. Computers & Mathematics with Applications, 60(7), 1964–1972. DOI 10.1016/j.camwa.2010.07.030. [Google Scholar] [CrossRef]
15. Dehghan, M., Ghesmati, A. (2010). Solution of the second-order one-dimensional hyperbolic telegraph equation by using the dual reciprocity boundary integral equation (DRBIE) method. Engineering Analysis with Boundary Elements, 34(1), 51–59. DOI 10.1016/j.enganabound.2009.07.002. [Google Scholar] [CrossRef]
16. Pekmen, B., Tezer-Sezgin, M. (2012). Differential quadrature solution of hyperbolic telegraph equation. Journal of Applied Mathematics, 2012, 18. DOI 10.1155/2012/924765. [Google Scholar] [CrossRef]
17. Jiwari, R., Pandit, S., Mittal, R. C. (2012). A differential quadrature algorithm for the numerical solution of the second order one dimensional hyperbolic telegraph equation. International Journal of Nonlinear Science, 13, 259–266. [Google Scholar]
18. Zerarka, A., Guergueb, S. (2013). Integration of the hyperbolic telegraph equation in (1 + 1) dimensions via the generalized differential quadrature method. Results in Physics, 3(3), 20–23. DOI 10.1016/j.rinp.2013.01.004. [Google Scholar] [CrossRef]
19. Raftari, B., Khosravi, H., Yildirim, A. (2013). Homotopy analysis method for the one-dimensional hyperbolic telegraph equation with initial conditions. International Journal of Numerical Methods for Heat & Fluid Flow, 23(2), 355–372. DOI 10.1108/09615531311293515. [Google Scholar] [CrossRef]
20. Elgindy, K. T. (2016). High-order numerical solution of second-order one-dimensional hyperbolic telegraph equation using a shifted Gegenbauer pseudospectral method. Numerical Methods for Partial Differential Equations, 32(1), 307–349. DOI 10.1002/num.21996. [Google Scholar] [CrossRef]
21. Mittal, R. C., Bhatia, R. (2013). Numerical solution of second order one dimensional hyperbolic telegraph equation by cubic B-spline collocation method. Applied Mathematics and Computation, 220(6), 496–506. DOI 10.1016/j.amc.2013.05.081. [Google Scholar] [CrossRef]
22. Myers, D. E., Iaco, S. D., Posa, D., Cesare, L. D. (2002). Space-time radial basis functions. Computational & Applied Mathematics, 43, 539–549. DOI 10.1016/S0898-1221(01)00304-2. [Google Scholar] [CrossRef]
23. Myers, D. E. (2008). Anisotropic radial basis functions. International Journal of Pure & Applied Mathematics, 42, 197–203. [Google Scholar]
24. Parand, K., Rad, J. A. (2013). Kansa method for the solution of a parabolic equation with an unknown space wise-dependent coefficient subject to an extra measurement. Computer Physics Communications, 184(3), 582–595. DOI 10.1016/j.cpc.2012.10.012. [Google Scholar] [CrossRef]
25. Wang, F. Z., Ling, L., Chen, W. (2009). Effective condition number for boundary knot method. Computers, Materials & Continua, 12, 57–70. DOI 10.3970/cmc.2009.012.057. [Google Scholar] [CrossRef]
26. Wang, F. Z., Chen, W., Ling, L. (2012). Combinations of the method of fundamental solutions for general inverse source identification problems. Applied Mathematics and Computation, 219(3), 1173–1182. DOI 10.1016/j.amc.2012.07.027. [Google Scholar] [CrossRef]
27. Fasshauer, G. E., Zhang, J. G. (2007). On choosing optimal shape parameters for RBF approximation. Numerical Algorithms, 45(1–4), 345–368. DOI 10.1007/s11075-007-9072-8. [Google Scholar] [CrossRef]
28. Chen, W., Hong, Y. X., Lin, J. (2018). The sample solution approach for determination of the optimal shape parameter in the Multiquadric function of the Kansa method. Computers & Mathematics with Applications, 75(8), 2942–2954. DOI 10.1016/j.camwa.2018.01.023. [Google Scholar] [CrossRef]
29. Sharifi, S., Rashidinia, J. (2016). Numerical solution of hyperbolic telegraph equation by cubic B-spline collocation method. Applied Mathematics and Computation, 281(1), 28–38. DOI 10.1016/j.amc.2016.01.049. [Google Scholar] [CrossRef]
30. Dehghan, M., Shokri, A. (2008). A numerical method for solving the hyperbolic telegraph equation. Numerical Methods for Partial Differential Equations, 24(4), 1080–1093. DOI 10.1002/num.20306. [Google Scholar] [CrossRef]
31. Doha, E. H., Abd-Elhameed, W. M., Youssri, Y. H. (2019). Fully Legendre spectral Galerkin algorithm for solving linear one-dimensional telegraph type equation. International Journal of Computational Methods, 16(8), 1850118. DOI 10.1142/S0219876218501189. [Google Scholar] [CrossRef]
32. Abd-Elhameed, W. M., Doha, E. H., Youssri, Y. H., Bassuony, M. A. (2016). New Tchebyshev–Galerkin operational matrix method for solving linear and nonlinear hyperbolic telegraph type equations. Numerical Methods for Partial Differential Equations, 32(6), 1553–1571. DOI 10.1002/num.22074. [Google Scholar] [CrossRef]
33. Rashidinia, J., Jokar, M. (2016). Application of polynomial scaling functions for numerical solution of telegraph equation. Applicable Analysis, 95(1), 105–123. DOI 10.1080/00036811.2014.998654. [Google Scholar] [CrossRef]
34. Youssri, Y. H., Abd-Elhameed, W. M. (2018). Numerical spectral Legendre–Galerkin algorithm for solving time fractional telegraph equation. Romanian Journal of Physics, 63, 107. [Google Scholar]
35. Hafez, R. M., Youssri, Y. H. (2020). Shifted Jacobi collocation scheme for multi-dimensional time-fractional order telegraph equation. Iranian Journal of Numerical Analysis and Optimization, 20(1), 195–223. DOI 10.22067/ijnao.v10i1.82774. [Google Scholar] [CrossRef]
36. Atangana, A. (2020). Modelling the spread of COVID-19 with new fractal-fractional operators: Can the lockdown save mankind before vaccination. Chaos, Solitons & Fractals, 136(C), 109860. DOI 10.1016/j.chaos.2020.109860. [Google Scholar] [CrossRef]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |