| Computer Modeling in Engineering & Sciences |
DOI: 10.32604/cmes.2021.016603
ARTICLE
Data-Driven Determinant-Based Greedy Under/Oversampling Vector Sensor Placement
Tohoku University, Sendai, Miyagi, 980-8579, Japan
*Corresponding Author: Yuji Saito. Email: yuji.saito@tohoku.ac.jp
Received: 11 March 2021; Accepted: 23 June 2021
Abstract: A vector-measurement-sensor-selection problem in the undersampled and oversampled cases is considered by extending the previous novel approaches: a greedy method based on D-optimality and a noise-robust greedy method in this paper. Extensions of the vector-measurement-sensor selection of the greedy algorithms are proposed and applied to randomly generated systems and practical datasets of flowfields around the airfoil and global climates to reconstruct the full state given by the vector-sensor measurement.
Keywords: Sparse sensor selection; vector-sensor measurement
Optimal sensor placement is an important challenge in the design, prediction, estimation, and control of high-dimensional systems. High-dimensional states can often leverage a latent low-dimensional representation, and this inherent compressibility enables sparse sensing. For example, in the applications of aerospace engineering, such as launch vehicles and satellites, optimal sensor placement is an important subject in performance prediction, control of the system, fault diagnostics and prognostics, etc. This is because there are limitations of installation, cost, and downlink capacity for transferring measurement data. Reduced-order modeling has been gathering a lot of attention in various fields. A proper orthogonal decomposition (POD) [1,2] is one of the effective methods for decomposing high-dimensional data into several significant modes. Here, POD is a data-driven modal decomposition method that gives the most significant and relevant structure in the data and exactly corresponds to principal component analysis and Karhunen-Loève (KL) decomposition, where the decomposed modes are orthogonal to each other. The POD analysis for a discrete data matrix can be carried out by applying singular value decomposition, as is often the case in the engineering fields. Although there are several advanced data-driven methods, dynamic mode decomposition [3,4], empirical mode decomposition, and others which include efforts by the authors [5,6], this research is only based on the POD which is the most basic data-driven method for reduced-order modeling. If the data can be effectively expressed by a limited number of POD modes, limited sensors placed at appropriate positions will give the information for full state reconstruction. Such effective observation might be one of the keys for flow control and flow prediction. Therefore, the study of optimal sensor placement is important in this field. Such sparse point sensors should be selected considering the POD modes. Although compressed sensing can recover a wider class of signals, the benefits of exploiting known patterns in data with optimized sensing are utilized. Drastic reductions in the required number of sensors and improved reconstruction can be expected in this case. This idea has been adopted by Manohar et al. [7], and the sparse-sensor-placement algorithm has been developed and discussed. The idea is expressed by the following equation:
Here,
Although Joshi et al. proposed a convex approximation method for this objective function [8] as discussed above, the proposed convex approximation methods suffer from a long computational time. Manohar et al. [7] proposed a QR method that provides an approximate greedy solution for the optimization, which is known to be a submatrix volume maximization, and improved the computational time required for the sensor selection problem, relative to the convex approximation method, by using the QR method. The QR method is based on the QR-discrete-empirical-interpolation method (QDEIM) [11,12]. The QR method works well for the sensor selection problem when the number of sensors is less than that of state variables (undersampling). However, the QR method does not seem to connect straightforwardly with the problem
The previous studies introduced so far consider the scalar-sensor measurement that the selected sensors obtain a single component of data at the sensor location. There are several applications of vector-sensor measurement, such as two components of velocity, or simultaneous velocity, pressure, and temperature measurements used in weather forecasting. For example, the real-time particle-image-velocimetry (PIV) measurement of the flowfield is required for the feedback control of a high-speed flowfield in laboratory experiments. The velocity field is calculated from the cross-correlation coefficient for each interrogation window of the particle images in the PIV measurement, but the number of windows that can be processed in a short time is limited because of the high computational costs of the calculation of cross-correlation coefficients. We have been developing a sparse processing particle-image-velocimetry (SPPIV)-measurement system [27]. The key point of this SPPIV-measurement system is the reduction of the amount of processing data and the estimation of the velocity field by a limited number of sparsely located windows, which allows the real-time PIV measurement. The development of an appropriate vector-measurement-sensor selection method is required for the highly accurate SPPIV.
Here, the difference between scalar and vector-sensor measurements is the number of components of data: scalar and vector-sensor measurements obtain a single and multiple components of data at the sensor location, respectively. The extension of the vector-measurement-sensor selection of the convex approximation method has already been addressed in Section C, Chapter V of the original paper [8]. However, the convex approximation method suffers from a long computational time as well as the scalar-measurement-sensor selection problem. Saito et al. straightforwardly extended the greedy algorithm based on the QR method [7] to vector-sensor problems such as fluid dynamic measurement applications [28], but its applications are only limited to undersampled sensors. Therefore, it is necessary to consider the oversampled case and improve the reconstruction accuracy for the high-dimensional data such as fluid dynamic measurement data. In the present study, the more general greedy algorithms based on the D-optimality-based greedy (DG) and Bayesian D-optimality-based greedy (BDG) methods, that were designed for both under and oversampled sensors, are extended to the vector-measurement-sensor selection problem. The effectiveness of these algorithms on the randomly generated systems and practical datasets related to the flowfield around an airfoil and the global climate is demonstrated by comparing the results to those using previously proposed algorithms.
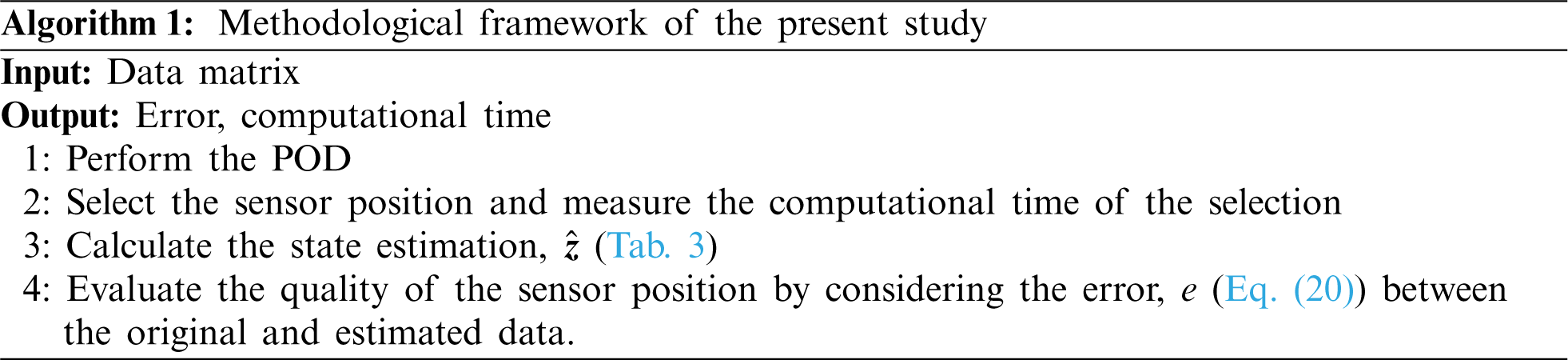
Fig. 1 and Algorithm 1 show the outline of the present study. The data matrix has two or more components as input. For example, in the case of the two-component velocity fields in Fig. 1, the data matrix
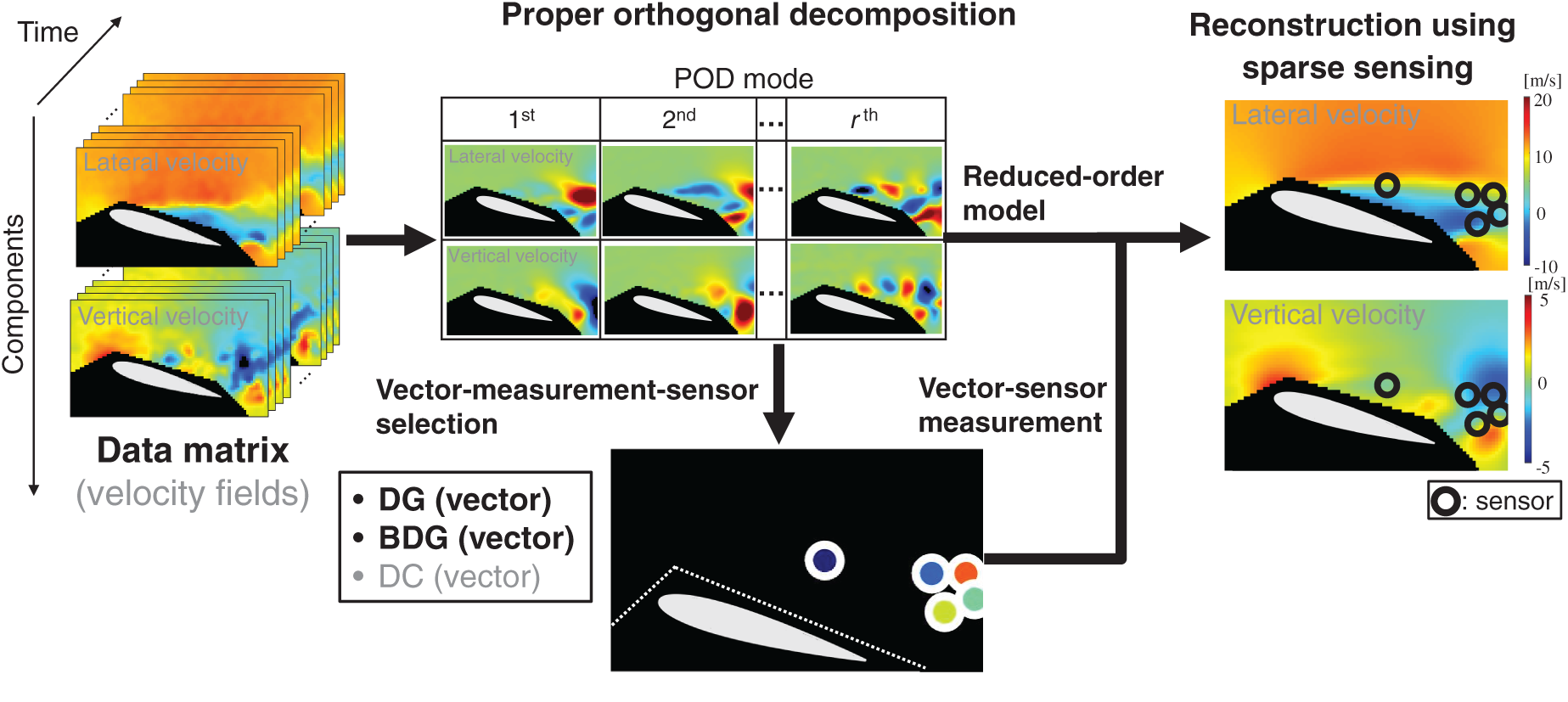
Figure 1: Concept of the present study

The main novelties and contributions of this paper are as follows:
• The present study extends the DG and BDG methods proposed for scalar-sensor measurements to vector-sensor measurements in the undersampled and oversampled cases.
• The extensions of the vector-sensor measurement of the DG and BDG methods for the undersampled and oversampled cases have significant novelties for the sparse-sensor measurement in terms of reconstruction error and computational time.
• The present study compares the performance of the DG and BDG methods with the random selection and DC methods under the conditions: p = 1 −20 at r = 10 (undersampled and oversampled cases) although the previous study [28] considered the vector-sensor selection problem undersampled the undersampled cases.
• The present study is applied to randomly generated systems and practical datasets of flowfields around the airfoil and global climates. These results illustrate that the proposed DG and BDG methods extended to the vector-measurement-sensor-selection problem are superior to the random selection and DC methods in terms of the accuracy of the sensor selection and computational cost in the present study.
2 Formulation and Algorithms for Sensor Selection Problem
2.1 Scalar-Measurement-Sensor-Selection Problem
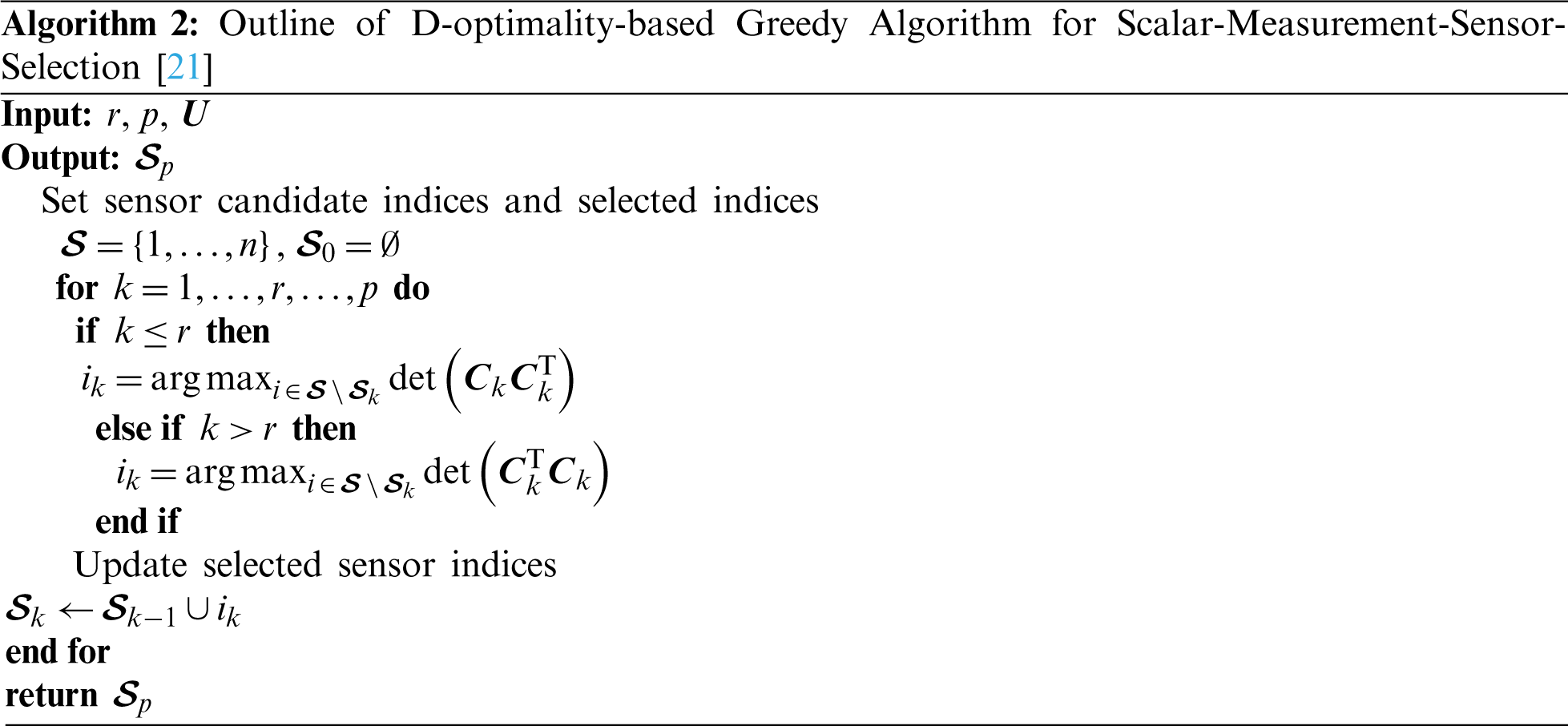
2.1.1 D-Optimality-Based Greedy Algorithm for Scalar-Measurement-Sensor-Selection [21]
A D-optimal design corresponds to maximize the determinant of the Fisher information matrix. Therefore, maximization of the determinant of
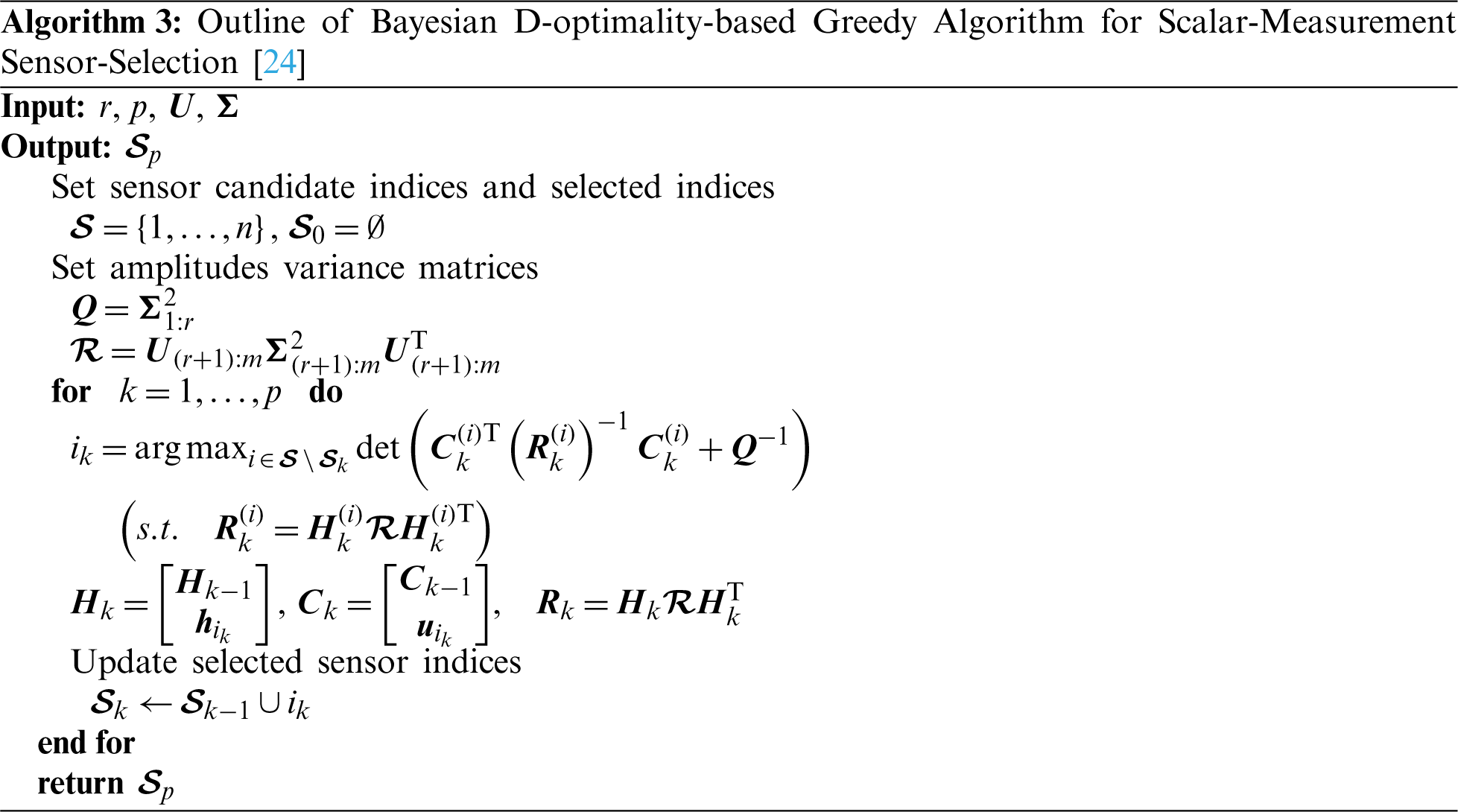
2.1.2 Bayesian D-Optimality-Based Greedy Algorithm for Scalar-Measurement-Sensor-Selection [24]
Improved D-optimality-based greedy algorithm was presented in the previous study [24], and two more priors are exploited for a more robust sensor selection than the D-optimality-based greedy algorithm: one is expected variance of the POD mode amplitudes, and the other is spatial covariance of the components that are truncated in the reduced order-modeling. The former one can be estimated from
where
where
where
and
Then, the Bayesian estimation is derived with those prior information. Here, an a priori probability density function (PDF) of the POD mode amplitudes becomes
Here, the maximum a posteriori estimation on
2.2 Vector-Measurement-Sensor-Selection Problem
A vector-measurement-sensor-selection problem in the undersampled and oversampled cases is considered by extending the previously explained DG and BDG methods. Again, the number of components of data is different for scalar and vector-sensor measurements: scalar and vector-sensor measurements obtain a single and multiple components of data at the sensor location, respectively. In the vector-sensor measurement, the following equation is considered:
Here,
where
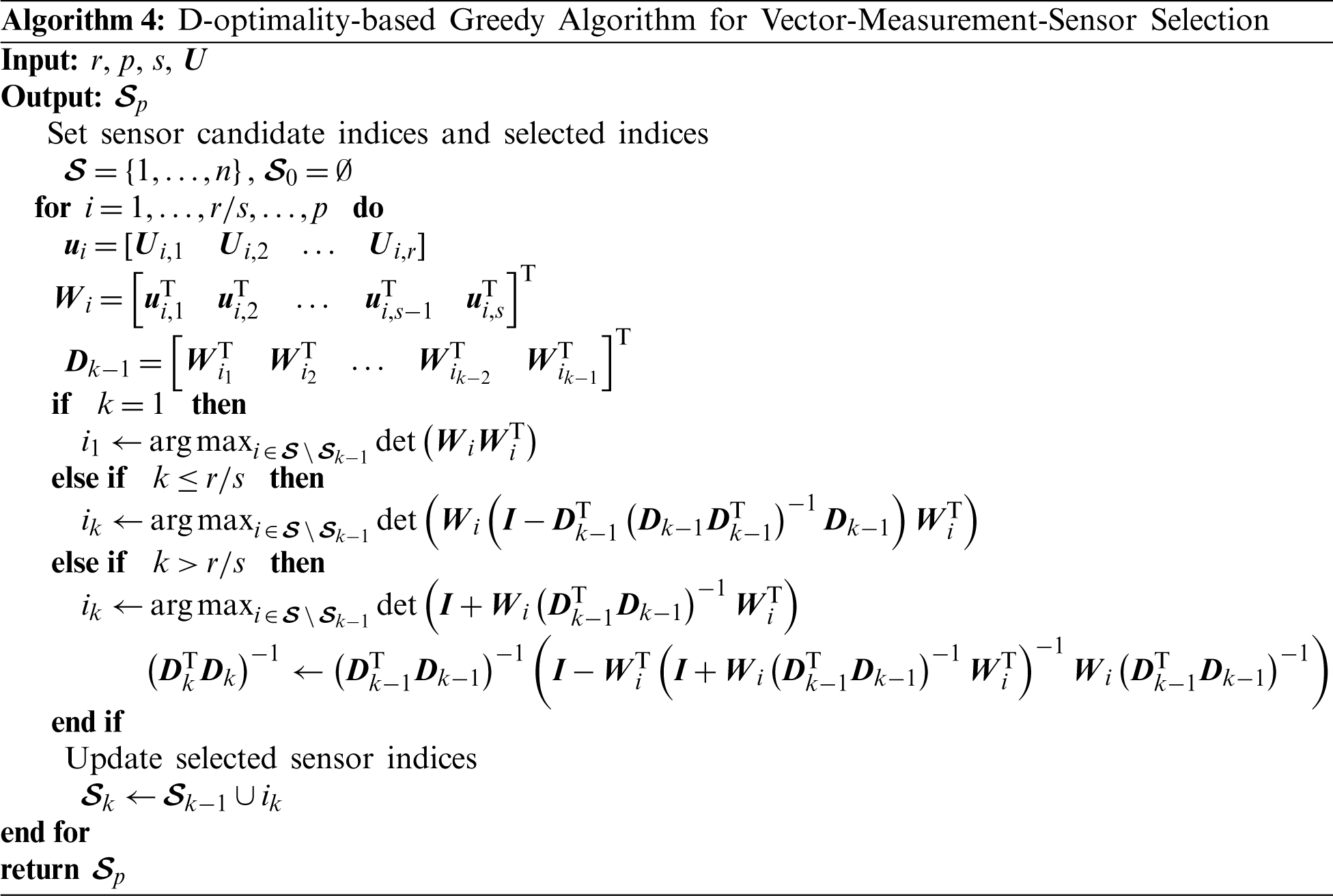
2.2.1 D-Optimality-Based Greedy Algorithm for Vector-Measurement-Sensor Selection
The algorithm of the DG method for vector-measurement sensors in the undersampled and oversampled cases is summarized in Algorithm 4.
The step-by-step maximization of the determinant of
and therefore,
In the undersampled case, the DG method is the same as the vector-measurement sensor selection method [28] which was developed based on the QR method, though the mathematical proof was omitted for brevity. Many previous studies have been conducted with the aim of reduction in the numerical instability and the computational cost when the QR decomposition is applied to the “tall-skinny matrices” [30]. Although there may be a possibility of numerical instability related to the QR decomposition for tall-skinny matrices, the numerical instability of the DG method proposed in the present study has not been observed in our experiences.
The maximization of the determinant of
Therefore,
The complexity when searching all components of the vector becomes
The size of the matrix is
2.2.2 Bayesian D-Optimality-Based Greedy Algorithm for Vector-Measurement-Sensor Selection
A fast implementation is considered as Saito et al. demonstrated in their determinant calculation using rank-one lemma [21]. First, the covariance matrix generated by the ith sensor candidate in the kth sensor selection,
where the covariance
and similarly, the variance of noise is defined as:
In addition,
where
The objective function of BDG is now considered based on the expressions above.
Because
Once the sensor is selected,

The numerical experiments are conducted and the proposed methods are validated. The random sensor, PIV, and NOAA-SST/ICEC problems are applied in the present study. The vector sensor-measurement matrix
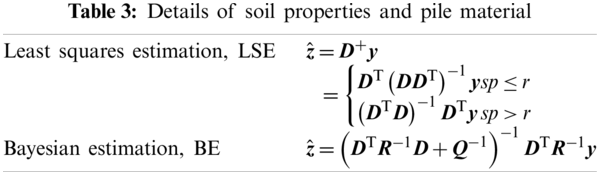
The quality of the sensors is evaluated by considering the error between the original and estimated data. The error e is defined as below:
Here, series of the estimation
The random data matrices,
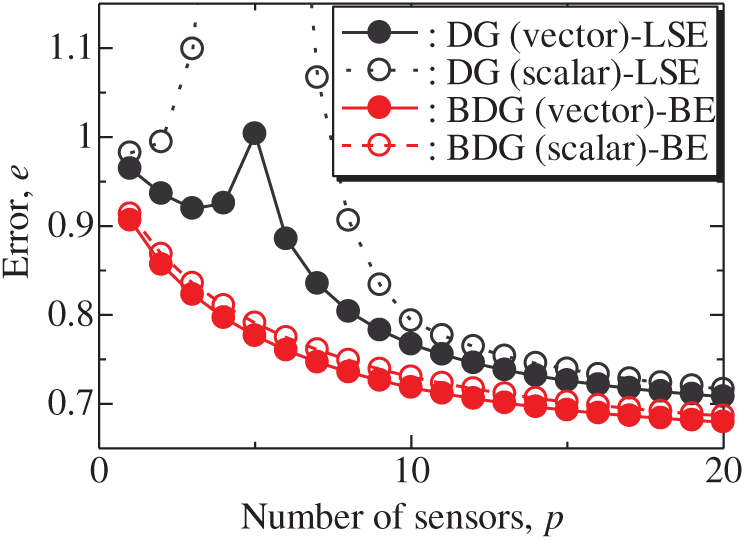
Figure 2: Errors of the results using the DG (scalar)-LSE, DG (vector)-LSE, BDG (scalar)-BE and BDG (vector)-BE methods against the number of sensors in the random sensor problem: n = 1000, m = 100, r = 10, s = 2
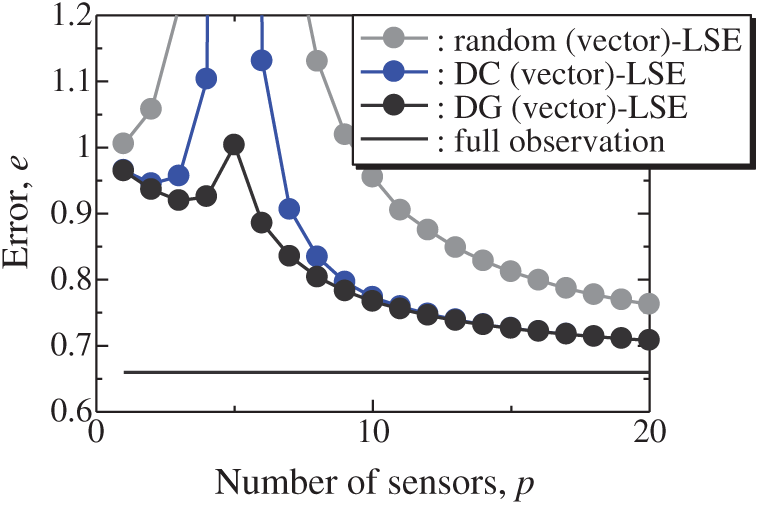
Figure 3: Errors of the results using the random (vector)-LSE, DC (vector)-LSE, and DG (vector)-LSE methods against the number of sensors in the random sensor problem: n = 1000, m = 100, r = 10, s = 2
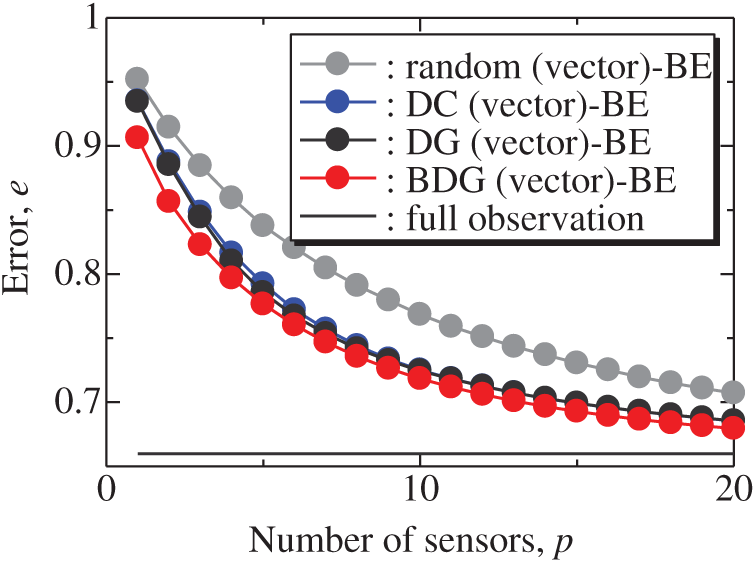
Figure 4: Errors of the results using the random (vector)-BE, DC (vector)-BE, DG (vector)-BE, and BDG (vector)-BE methods against the number of sensors in the random sensor problem: n = 1000, m = 100, r = 10, s = 2
Fig. 5 shows the relationship between the computational time of the results using the random (vector), DC (vector), DG (vector), and BDG (vector) methods and the number of sensors p in the random sensor problem. The random (vector) and DC (vector) methods take a certain amount of time regardless of the number of sensors, and the DC method has a particularly high calculation cost. The computational times of the DG (vector) and BDG (vector) methods increase monotonically as the number of sensors increases since the sensors are determined greedily. In this random problem, the computational time of the DG (vector) method is much shorter than that of the DC (vector) method, and the computational time of the BDG (vector) method is shorter than that of the DC method in the case of
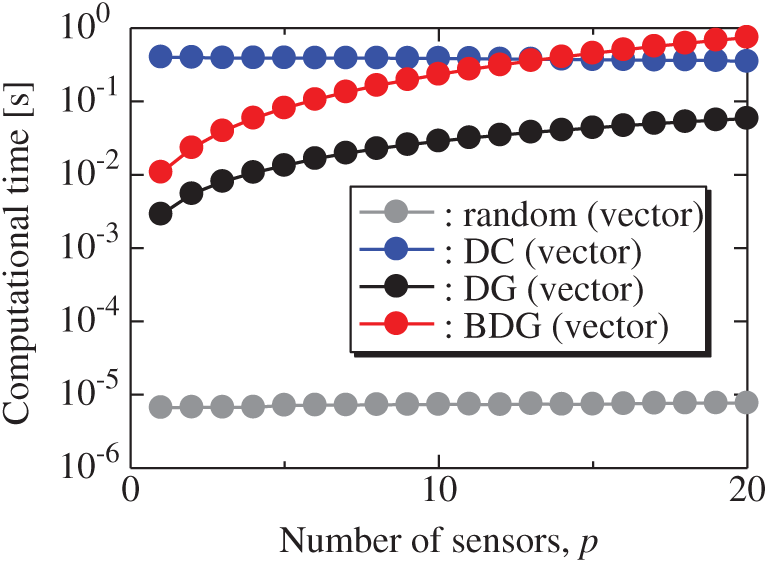
Figure 5: Computational times of the results using the random (vector), DC (vector), DG (vector), and BDG (vector) methods against the number of sensors in the random sensor problem: n = 1000, m = 100, r = 10, s = 2
The particle image velocimetry (PIV) for acquiring time-resolved data of velocity fields around an airfoil was conducted previously [31]. The effectiveness of the present method for the PIV data is demonstrated hereafter. Here, the overview of the experimental data is briefly explained. The wind-tunnel test was conducted in the Tohoku-university Basic Aerodynamic Research Wind Tunnel (T-BART) with a closed test section of 300 mm
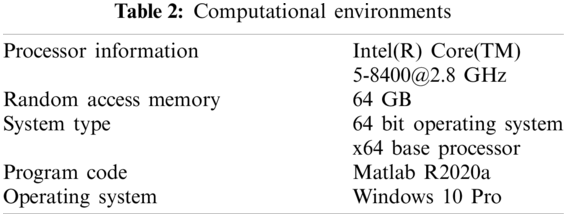
The vector-measurement-sensor selection problem for the reconstruction of the lateral and vertical components of the velocities measured by PIV (Figs. 6 and 7) is solved using the same computational environments listed in Tab. 2 as those used in the random sensor problem. Fig. 8 shows the relationship between the errors of the results using the DG (vector)-LSE, DG (scalar, lateral)-LSE, DG (scalar, vertical)-LSE, BDG (vector)-BE, BDG (scalar, lateral)-BE and BDG (scalar, vertical)-BE methods in the PIV problem (n = 6096, m = 1000, r = 10, and s = 2), where the lateral and vertical represent the lateral and vertical components of the velocity fields. The errors of the results using the DG (vector)-LSE and BDG (vector)-BE methods, which are extended to the vector-sensor measurement in the present study, are smaller than those of the results using the DG (scalar, lateral and vertical)-LSE methods and the BDG (scalar, lateral and vertical)-BE methods, respectively in the PIV problem. Fig. 9 shows the snapshots of the original and reconstructed data by the random (vector)-LSE, DC (vector)-LSE, and DG (vector)-LSE, respectively in the cases of sp = r = 10. The black open circles show the sensor positions selected by each method. The random (vector)-LSE method cannot correctly reconstruct the velocity fields compared to those of the original data. On the other hand, the velocity fields reconstructed by the DC (vector)-LSE and DG (vector)-LSE methods are almost the same as the velocity fields of the original data. Figs. 10 and 11 show the relationships between the errors of the results using the random (vector)-LSE, DC (vector)-LSE, and DG (vector)-LSE methods and the number of sensors for the PIV problem in which the training and validation data are the same as each other and in which the training and validation data are different (K-fold cross-validation, K = 5). The error of the results using the random (vector)-LSE is averaged over 1000 trials. The error bars represent the standard deviations of the five calculations in Fig. 11. All the errors increase in the case of
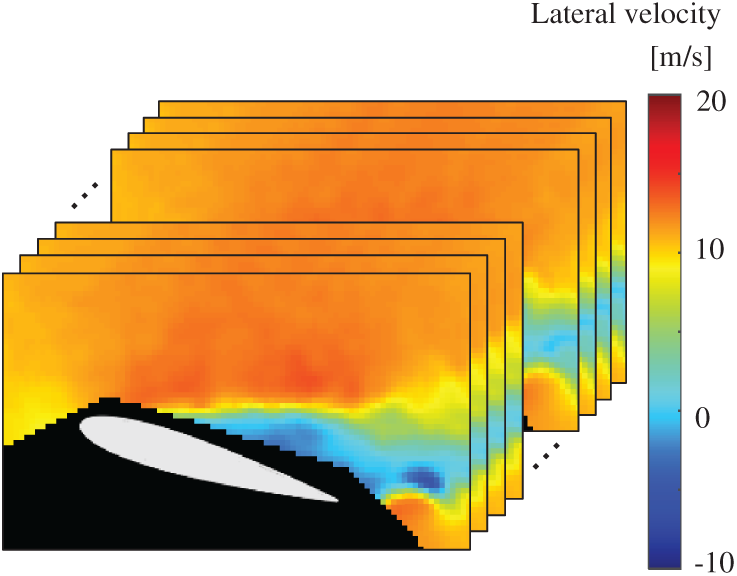
Figure 6: Dataset of PIV: snapshots of the lateral-velocity field
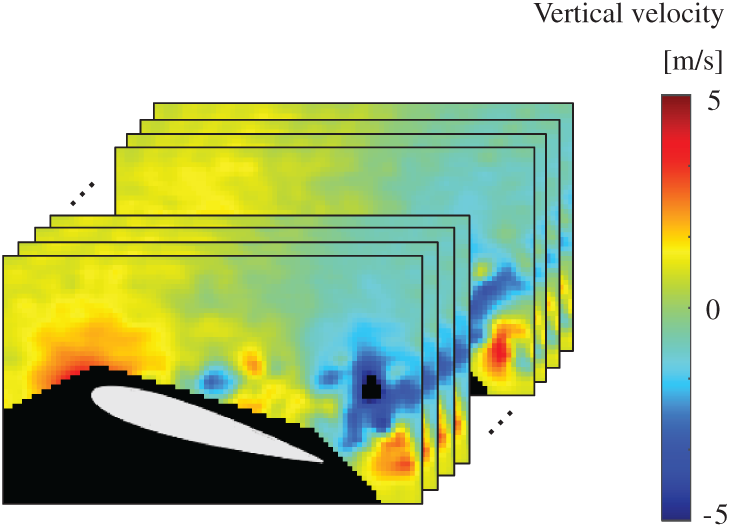
Figure 7: Dataet of PIV: snapshots of the vertical-velocity field
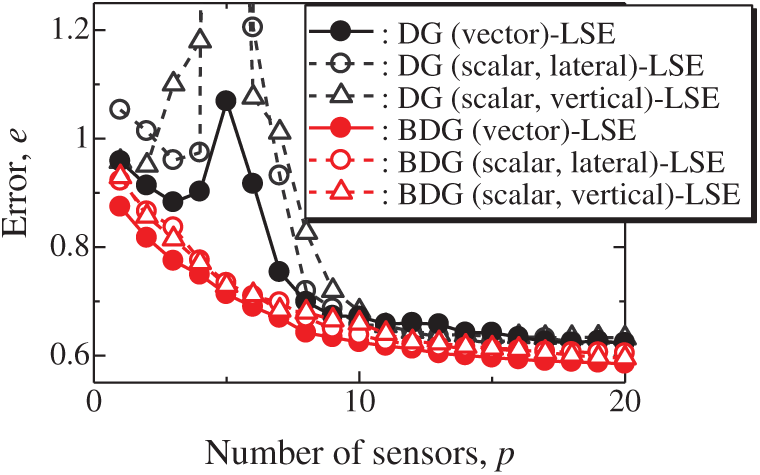
Figure 8: Errors of the results using the DG (vector)-LSE, DG (scalar, lateral)-LSE, DG (scalar, vertical)-LSE, BDG (vector)-BE, BDG (scalar, lateral)-BE and BDG (scalar, vertical)-BE methods against the number of sensors in the PIV problem: n = 6096, m = 1000, r = 10, p = 5 and s = 2
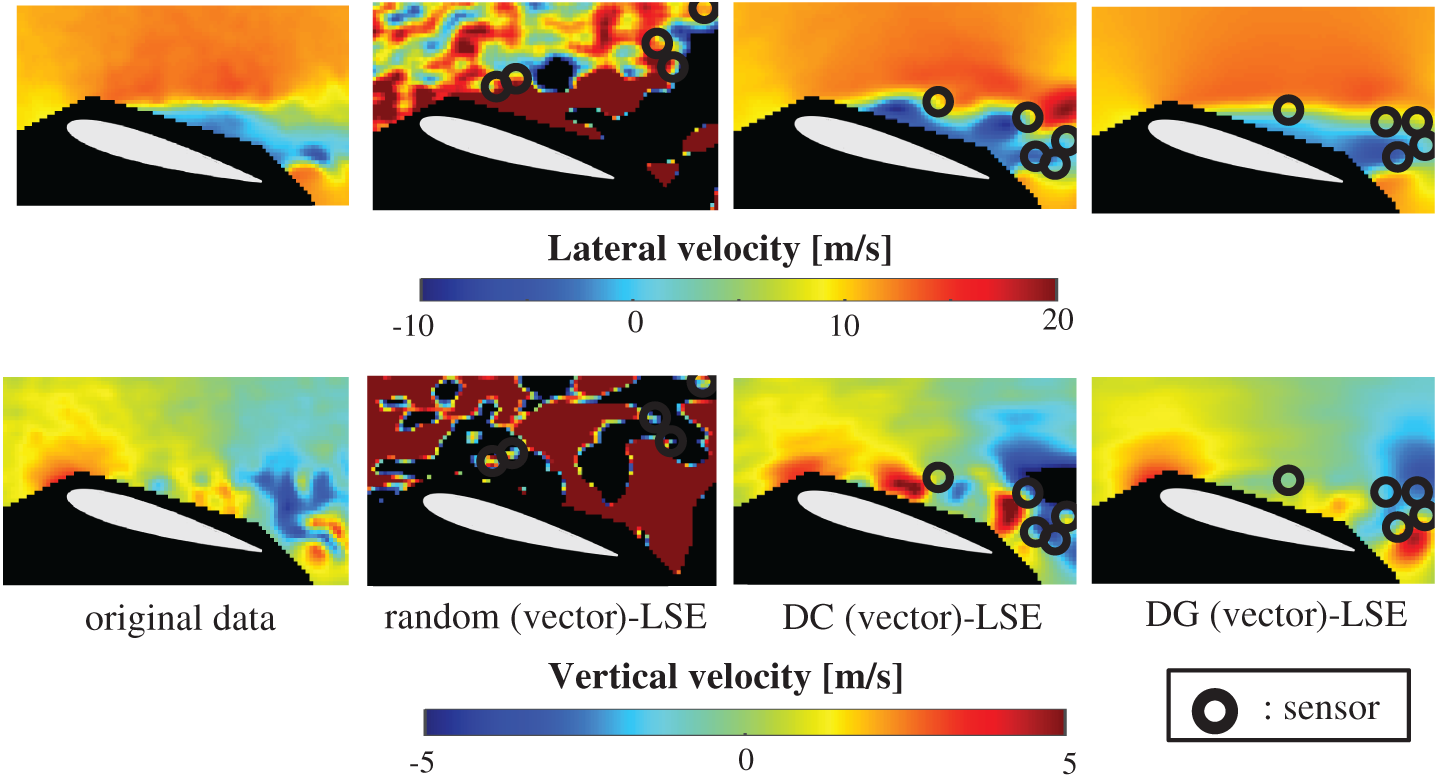
Figure 9: Single snapshots of the original data and reconstructed velocity fields by the random (vector)-LSE, DC (vector)-LSE, and DG (vector)-LSE methods, respectively in the PIV problem: n = 6096, m = 1000, r = 10, p = 5 and s = 2
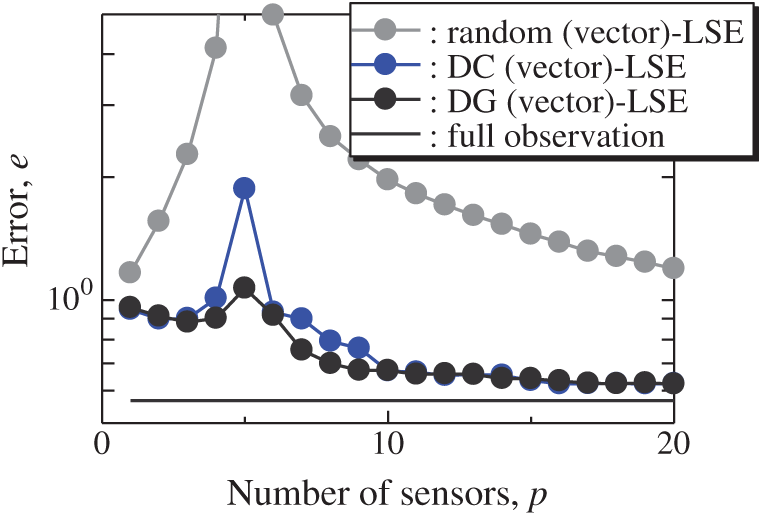
Figure 10: Errors of the results using the random (vector)-LSE, DC (vector)-LSE, DG (vector)-LSE methods against the number of sensors in the PIV problem: n = 6096, m = 1000, r = 10, s = 2
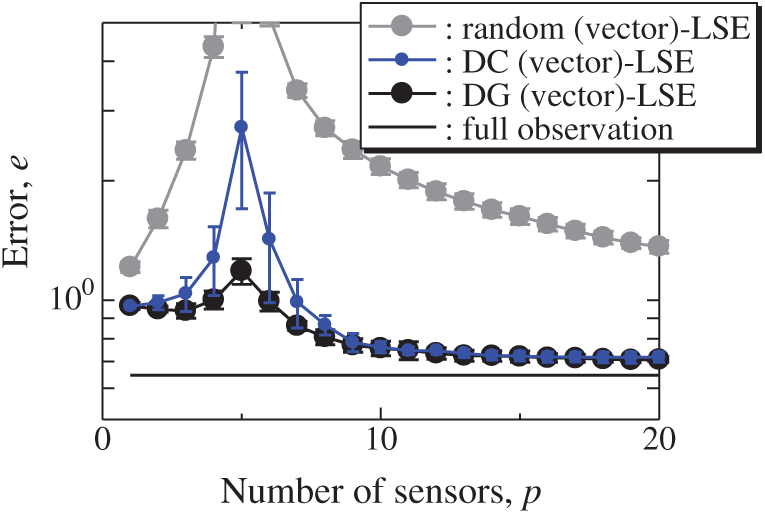
Figure 11: Errors of the K-fold cross-validation results using the random (vector)-LSE, DC (vector)-LSE, DG (vector)-LSE methods against the number of sensors in the PIV problem: n = 6096, m = 1000, r = 10, s = 2, and K = 5
Fig. 12 shows the snapshots of the reconstructed data by the BDG (vector)-BE, random (vector)-BE, DC (vector)-BE and DG (vector)-BE methods, respectively in the cases of sp = r = 10. The velocity fields reconstructed by the BDG (vector)-BE, random (vector)-BE, DC (vector)-BE and DG (vector)-BE methods are almost the same as the velocity fields of the original data as shown in Fig. 9. Figs. 13 and 14 show the relationship between the errors of the results using the random (vector)-BE, DC (vector)-BE, DG (vector)-BE and BDG (vector)-BE methods and the number of sensors for the PIV problem in which the training and validation data are the same as each other and in which the training and validation data are different (K-fold cross-validation, K = 5). All the errors estimated by the BE method are smaller than those estimated by the LSE method in as shown in Figs. 10 and 11, and monotonically decrease as the number of sensors increases as well as the random sensor problem. The error of the BDG (vector)-BE method, which extended to the vector-sensor measurement in the present study is the smallest in this PIV problem. Although Loiseau et al. show the two-dimensional cylinder flow reconstructed by the selected five sensors [32], the sensors are selected by the scalar-sensor measurement based on the QR method [7]. Therefore, their results will be improved by the DG (vector) and BDG (vector) methods extended to the vector-sensor measurement. Fig. 15 shows the relationship between the computational time and the number of sensors p in the PIV problem. As well as the random sensor problem, the random (vector) and DC (vector) methods take a certain amount of time regardless of the number of sensors. The computational times of the DG (vector) and BDG (vector) methods increase monotonically as the number of sensors increases since the sensors are determined greedily. The BDG (vector) method takes longer to calculate than the DC (vector) method in the case of p > 10, however, the BDG (vector) method has the smallest error in the PIV problem as shown in Figs. 13 and 14. The r2 truncation [24] for the BDG (vector) method will reduce the computational time although the r2 truncation is not addressed in the PIV problem. The DG (vector) method which has the same error as the DC (vector) method is faster than the BDG (vector) and DC (vector) methods. Therefore, the BDG (vector) and DG (vector) methods extended in the present study are better methods in the PIV problem obtained through real wind-tunnel tests.
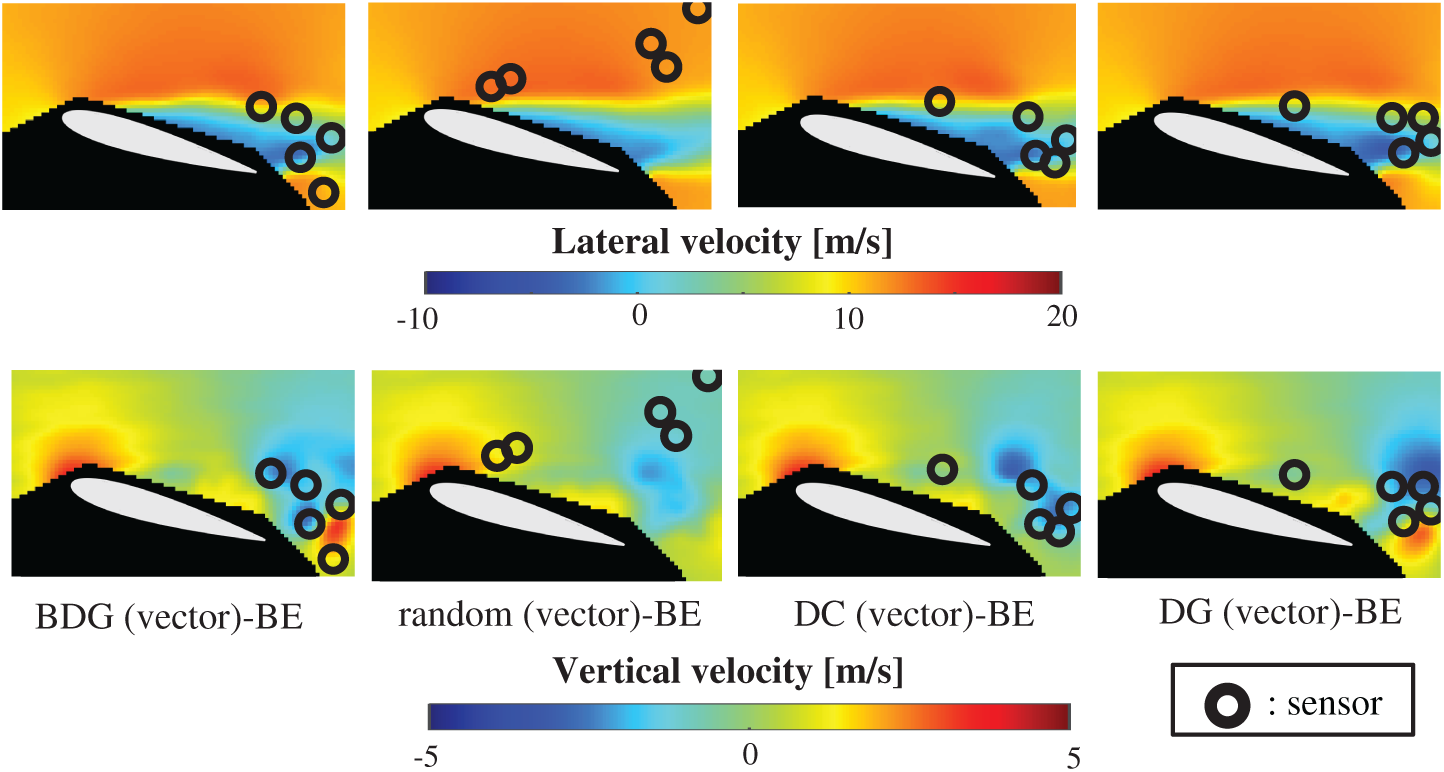
Figure 12: Single snapshots of the reconstructed velocity fields by the BDG (vector)-BE, random (vector)-BE, DC (vector)-BE and DG (vector)-BE methods, respectively in the PIV problem: n = 6096, m = 1000, r = 10, p = 5 and s = 2
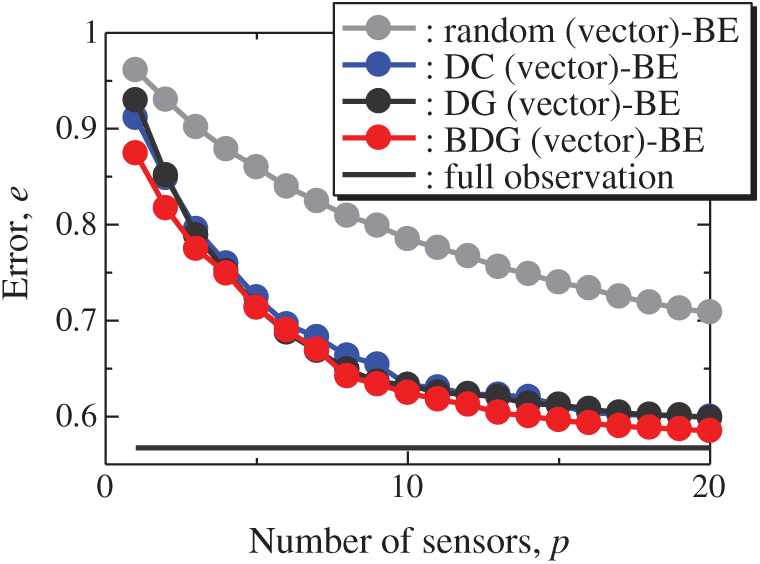
Figure 13: Errors of the results using the random (vector)-BE, DC (vector)-BE, DG (vector)-BE and BDG (vector)-BE methods against the number of sensors in the PIV problem: n = 6096, m = 1000, r = 10 and s = 2
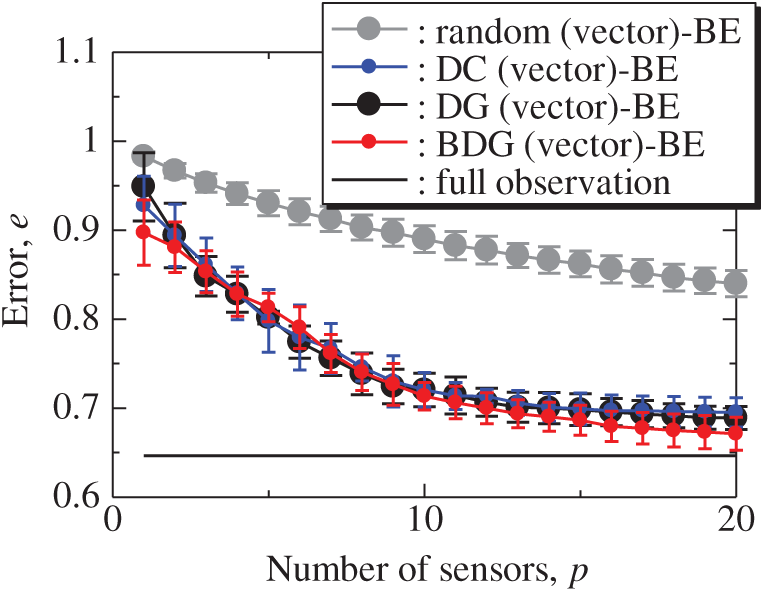
Figure 14: Errors of the K-fold cross-validation results using the random (vector)-BE, DC (vector)-BE, DG (vector)-BE and BDG (vector)-BE methods against the number of sensors in the PIV problem: n = 6096, m = 1000, r = 10, s = 2, and K = 5
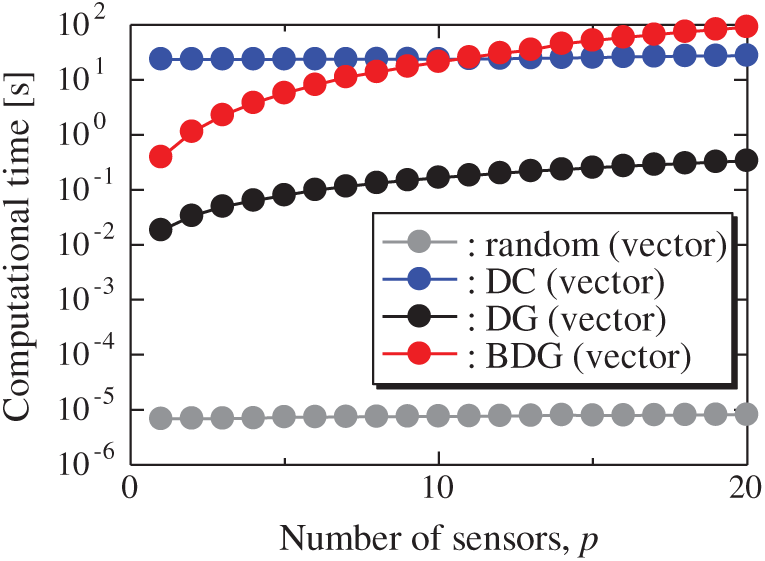
Figure 15: Computational times of the results using the random (vector), DC (vector), DG (vector), and BDG (vector) methods against the number of sensors in the PIV problem: n = 6096, m = 1000, r = 10 and s = 2
The data set that we finally adopt is the NOAA OISST V2 mean sea surface dataset (NOAA-SST/ICEC), comprising weekly global sea surface temperature in Fig. 16) and ice concentrations (Fig. 17) in the years between 1990 and 2000 (m = 520) [33]. There are a total of 520 snapshots on a 360
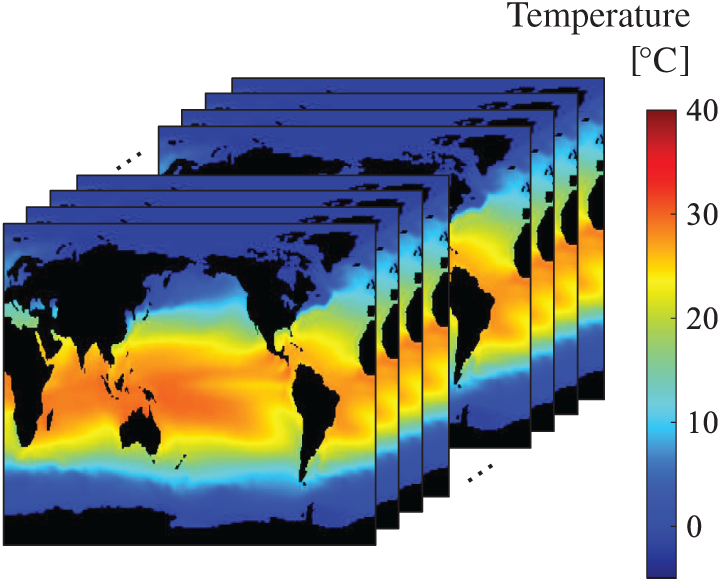
Figure 16: Dataset of NOAA-SST/ICEC: snapshots of the sea-surface-temperature filed
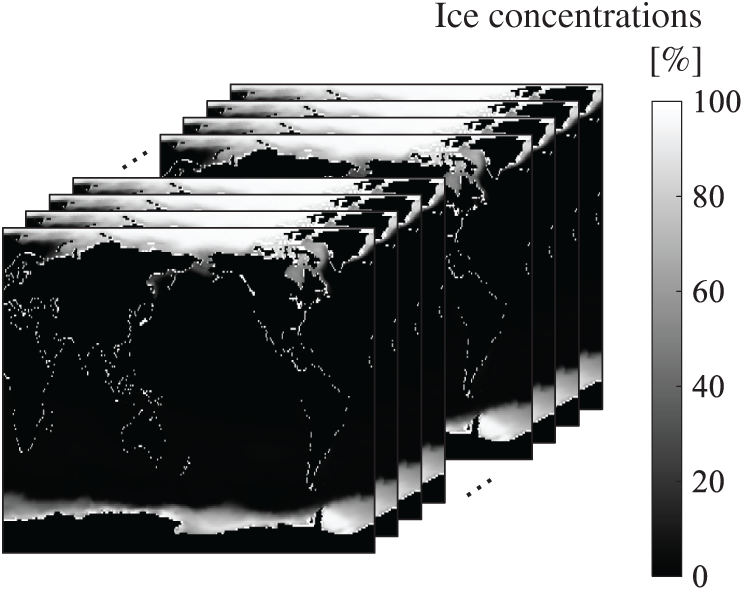
Figure 17: Dataset of NOAA-SST/ICEC: snapshots of the ice-concentrations field
Fig. 18 shows the relationship between the errors of the results using the DG (vector)-LSE, DG (scalar, SST)-LSE, DG (scalar, ICEC)-LSE, BDG (vector)-BE, BDG (scalar, SST)-BE and BDG (scalar, ICEC)-BE methods in the NOAA-SST/ICEC problem (n = 88438, m = 520, s = 2, and r = 10), where SST and ICEC represent the sea surface temperature and ice concentrations, respectively. The errors of the results using the DG (vector)-LSE and BDG (vector)-BE methods, which are extended to the vector-sensor measurement in the present study, are smaller than those of the results using the DG (scalar, SST and ICEC)-LSE methods and the BDG (scalar, SST and ICEC)-BE methods, respectively in the NOAA-SST/ICEC problem. Fig. 19 shows the snapshots of the original and reconstructed data by the random (vector)-LSE, DC (vector)-LSE, and DG (vector)-LSE methods, respectively in the cases of sp = r = 10. The yellow open circles show the sensor positions selected by each method. The random (vector)-LSE and DC (vector)-LSE methods cannot correctly reconstruct the snapshots compared to those of the original data. On the other hand, the snapshots of the reconstructed fields data by the DG (vector)-LSE method are almost the same as those of the original data. Figs. 20 and 21 show the relationships between the errors of the results using the random (vector)-LSE, DC (vector)-LSE, DG (vector)-LSE methods and the number of sensors for the NOAA-SST/ICEC problem in which the training and validation data are the same as each other and in which the training and validation data are different (K-fold cross-validation, K = 5). The error of the results using the random (vector)-LSE is averaged over 1000 trials. The error bars represent the standard deviations of the five calculations in Fig. 21. All the errors increase in the case of
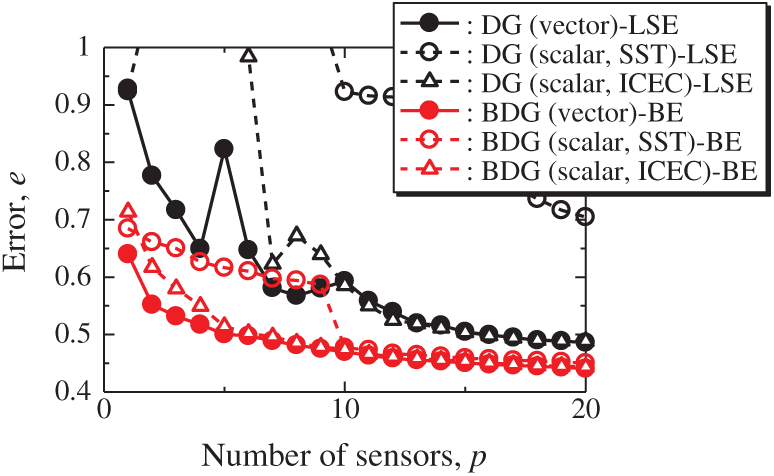
Figure 18: Errors of the results using the DG (vector)-LSE, DG (scalar, SST)-LSE, DG (scalar, ICEC)-LSE, BDG (vector)-BE, BDG (vector)-BE, BDG (scalar, SST)-BE and BDG (scalar, ICEC) methods against the number of sensors in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, p = 5, and s = 2
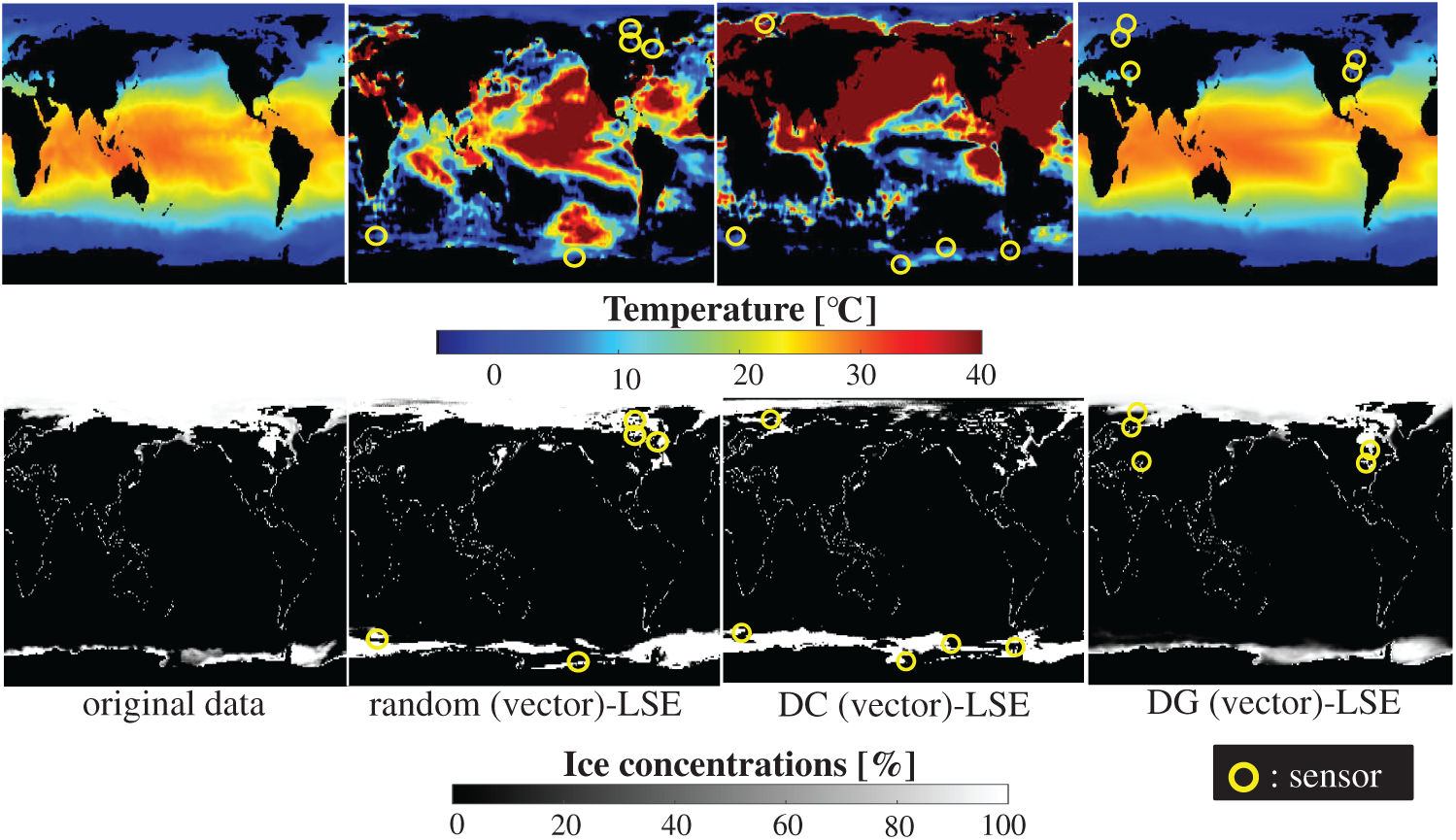
Figure 19: Single snapshots of the original data and reconstructed fields data by the random (vector)-LSE, DC (vector)-LSE, and DG (vector)-LSE methods, respectively in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, p = 5, and s = 2
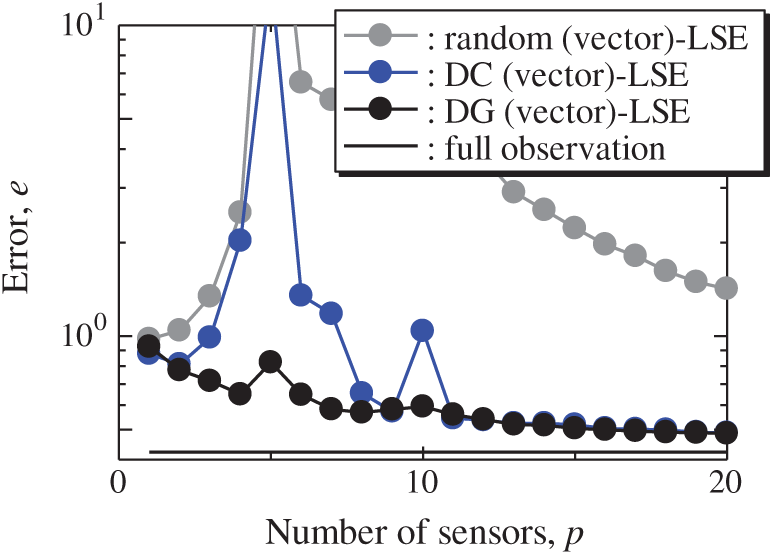
Figure 20: Errors of the results using the random (vector)-LSE, DC (vector)-LSE and DG (vector)-LSE methods against the number of sensors in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, and s = 2
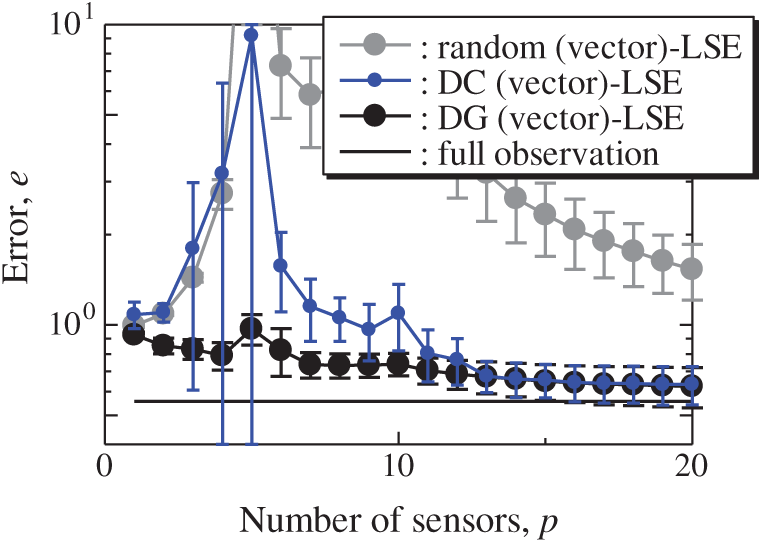
Figure 21: Errors of the K-fold cross-validation results using the random (vector)-LSE, DC (vector)-LSE and DG (vector)-LSE methods against the number of sensors in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, s = 2, and K = 5
Fig. 22 shows the snapshots of the reconstructed data by the BDG (vector)-BE, random (vector)-BE, DC (vector)-BE, and DG (vector)-BE methods, respectively in the cases of sp = r = 10. The random (vector)-LSE and DC (vector)-LSE methods cannot correctly reconstruct the snapshots compared to those of the original data. On the other hand, the snapshots of the reconstructed fields data by the DG (vector)-LSE method are almost the same as those of the original data. The snapshots of the reconstructed data by the BDG (vector)-BE, random (vector)-BE, DC (vector)-BE and DG (vector)-BE methods are almost the same as the snapshot of the original data as shown in Fig. 19. Figs. 23 and 24 show the relationships between the errors of the results using the random (vector)-BE, DC (vector)-BE, DG (vector)-BE methods and the number of sensors for the NOAA-SST/ICEC problem in which the training and validation data are the same as each other and in which the training and validation data are different (K-fold cross-validation, K = 5).
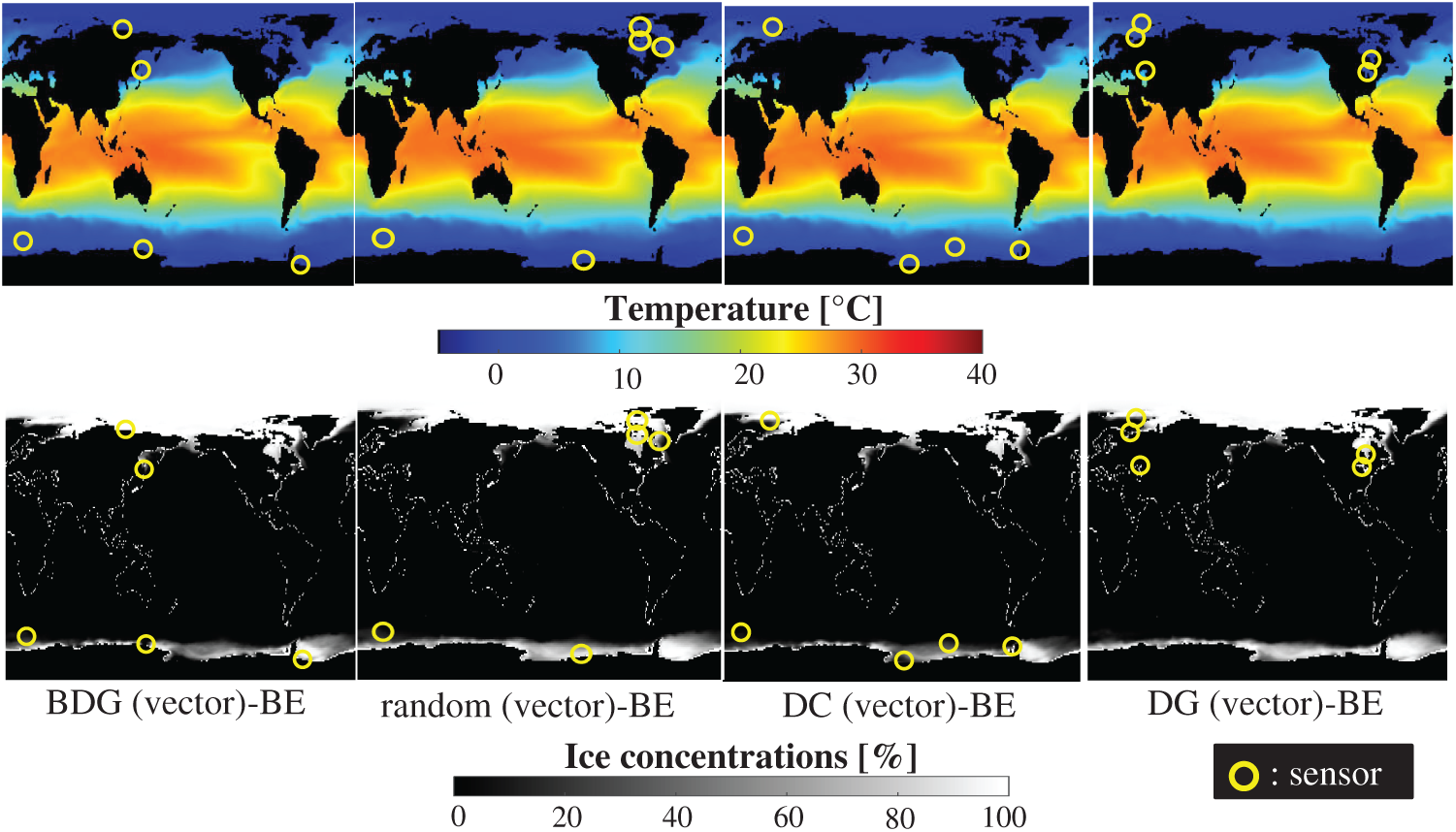
Figure 22: Single snapshots of the original data and reconstructed fields data by the BDG (vector)-BE, random (vector)-BE, DC (vector)-BE and DG (vector)-BE methods, respectively in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, p = 5, and s = 2
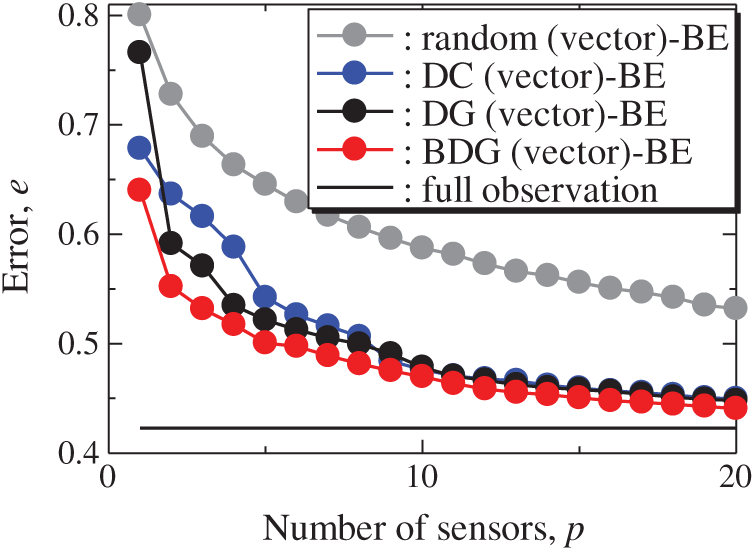
Figure 23: Errors of the results using the random (vector)-BE, DC (vector)-BE, DG (vector)-BE and BDG (vector)-BE methods against the number of sensors in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, and s = 2
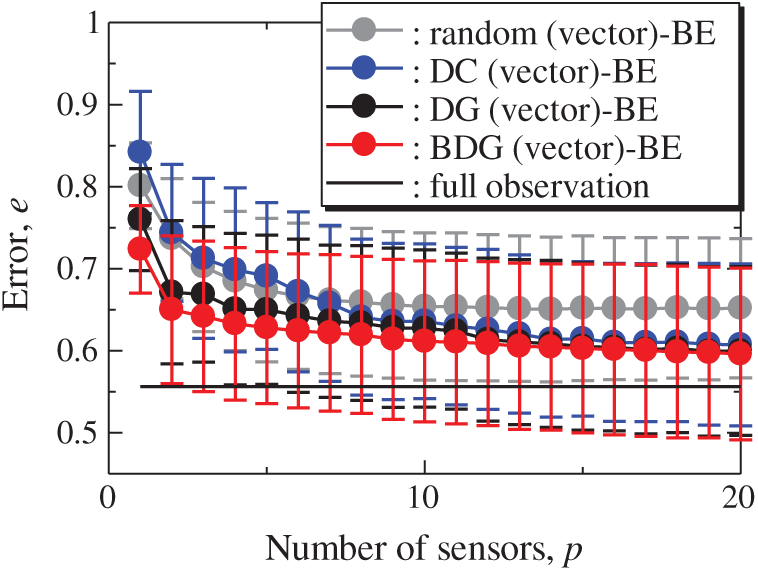
Figure 24: Errors of the K-fold cross-validation results using the random (vector)-BE, DC (vector)-BE, DG (vector)-BE and BDG (vector)-BE methods against the number of sensors in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, s = 2, and K = 5
All the errors estimated by the BE method are smaller than those estimated by the LSE method as shown in Figs. 20 and 21, and monotonically decrease as the number of sensors increases as well as the problems of the random sensor and PIV. The error of the BDG (vector)-BE method, which extended to the vector-sensor measurement in the present study is the smallest in the NOAA/ICEC problem. There is a larger difference between the upper and lower bounds of the error bars than the ones in the PIV problem shown in Fig. 14. The error of the BDG (vector)-BE, which is extended to the vector-sensor measurement in the present study, is the smallest in the NOAA-SST/ICEC problem although the large difference of the error bars might implicate that the quantitative performance of the proposed methods depends on the problem. Fig. 25 shows the relationship between the computational time and the number of sensors p in the NOAA-SST/ICEC problem. Note that, the locations are beforehand excluded from
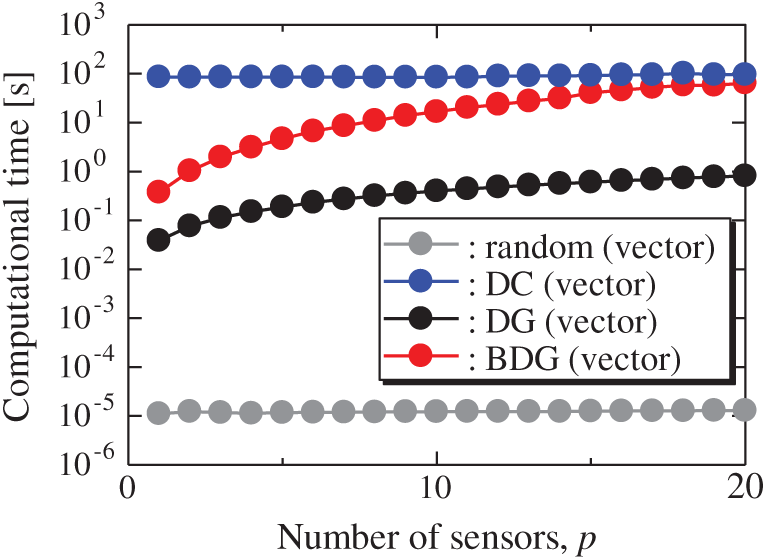
Figure 25: Computational times of the results using the random (vector), DC (vector), DG (vector), and BDG (vector) methods against the number of sensors in the NOAA-SST/ICEC problem: n = 88438, m = 520, r = 10, s = 2, and K = 5
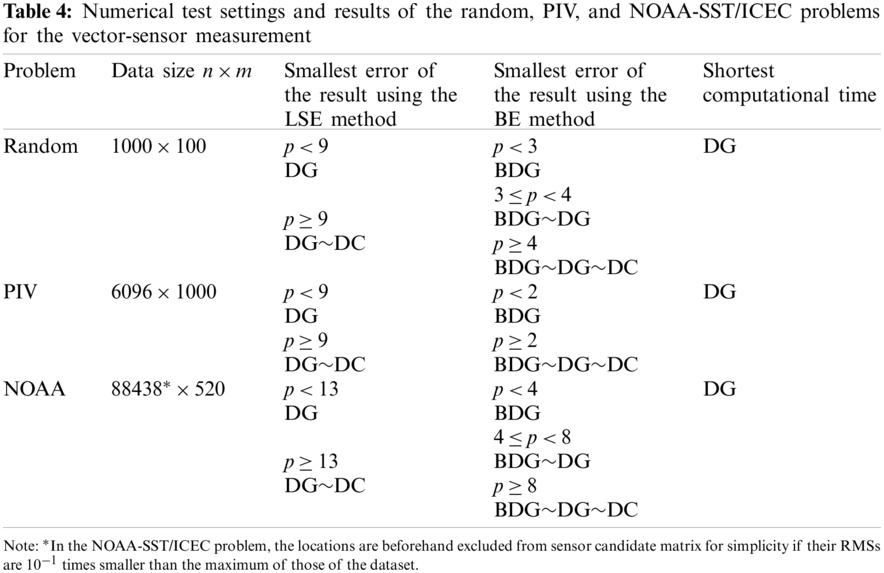
Tab. 4 summarizes the numerical test settings and results of the random, PIV, and NOAA-SST/ICEC problems for the vector-sensor measurement. Here, all the methods excluding the random method are compared. The trends of the errors and computational time are the same in all problems in the present study. The errors of the results using the DG (vector)-LSE and BDG (vector)-BE methods are the smallest for all problems. In addition, as the number of sensors increases, the errors of the results using the DC (vector)-LSE is close to that of the results using the DG (vector)-LSE method, and the error of the results using DG (vector)-BE and DC (vector)-BE methods is close to that of the BDG (vector)-BE method. The computational time of the DG (vector) method is the shortest for all problems. These results summarize that the proposed DG (vector) and BDG (vector) methods extended to the vector-sensor measurement are superior to the random (vector) and DC (vector) methods in terms of the accuracy of the sensor selection and computational cost in the present study.
A vector-measurement-sensor-selection problem in the under and oversampled cases is considered by extending the previous novel approaches: a greedy method based on D-optimality (DG) and a noise-robust greedy method (BDG) in the present study. Extensions of the vector-measurement-sensor selection of the greedy algorithms are proposed and applied to randomly generated systems and practical datasets of flowfield around airfoil and global climates and the full states are reconstructed by the vector-sensor measurement. In all demonstrations, the random selection and convex approximation methods are evaluated as the references in addition to the proposed DG and BDG methods. The least squares and Bayesian estimation methods are employed as the state estimation method in the present study.
The results applied to randomly generated systems show the proposed DG and BDG methods select better the position of the sparse sensor than the random selection and convex approximation methods. The results applied to practical datasets of flowfield around the airfoil and global climates are similar to the results applied to randomly generated systems. In addition, the reconstructed fields from the selected sensor in the noise-robust greedy (BDG) method are closest to the original data in all demonstrations. These results illustrate that the proposed methods extended to the vector-sensor measurement are superior to the random selection and convex approximation methods in terms of the accuracy of the sensor selection and computational cost in the present study.
Although the vector-measurement-sensor-selection problem extended by the present study is a more realistic sensor placement problem than the traditional scalar-measurement-sensor-selection problem, there are gaps between ideal models and real-world practicalities. For example, which is the better whether to place a large number of cheap sensors having a low signal-to-noise level, a small number of expensive sensors having a high signal-to-noise level, or a mix of both. The sensor selection problem considering the cost problem [17–19] will be the subject of challenging future research.
Funding Statement: This work was supported by JST ACT-X (JPMJAX20AD), JST CREST (JPMJCR1763) and JST FOREST (JPMJFR202C), Japan.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. Berkooz, G., Holmes, P., Lumley, J. L. (1993). The proper orthogonal decomposition in the analysis of turbulent flows. Annual Review of Fluid Mechanics, 25(1), 539–575. DOI 10.1146/annurev.fl.25.010193.002543. [Google Scholar] [CrossRef]
2. Taira, K., Brunton, S. L., Dawson, S. T., Rowley, C. W., Colonius, T. et al. (2017). Modal analysis of fluid flows: An overview. AIAA Journal, 55(12), 4013–4041. DOI 10.2514/1.J056060. [Google Scholar] [CrossRef]
3. Schmid, P. J. (2010). Dynamic mode decomposition of numerical and experimental data. Journal of Fluid Mechanics, 656, 5–28. DOI 10.1017/S0022112010001217. [Google Scholar] [CrossRef]
4. Kutz, J. N., Brunton, S. L., Brunton, B. W., Proctor, J. L. (2016). Dynamic mode decomposition: Data-driven modeling of complex systems. USA: Society for Industrial and Applied Mathematics. [Google Scholar]
5. Nonomura, T., Shibata, H., Takaki, R. (2018). Dynamic mode decomposition using a kalman filter for parameter estimation. AIP Advances, 8(10), 105106. DOI 10.1063/1.5031816. [Google Scholar] [CrossRef]
6. Nonomura, T., Shibata, H., Takaki, R. (2019). Extended-Kalman-filter-based dynamic mode decomposition for simultaneous system identification and denoising. PLoS One, 14(2), e0209836. DOI 10.1371/journal.pone.0209836. [Google Scholar] [CrossRef]
7. Manohar, K., Brunton, B. W., Kutz, J. N., Brunton, S. L. (2018). Data-driven sparse sensor placement for reconstruction: Demonstrating the benefits of exploiting known patterns. IEEE Control Systems Magazine, 38(3), 63–86. DOI 10.1109/MCS.2018.2810460. [Google Scholar] [CrossRef]
8. Joshi, S., Boyd, S. (2009). Sensor selection via convex optimization. IEEE Transactions on Signal Processing, 57(2), 451–462. DOI 10.1109/TSP.2008.2007095. [Google Scholar] [CrossRef]
9. Nonomura, T., Ono, S., Nakai, K., Saito, Y. (2021). Randomized subspace newton convex method applied to data-driven sensor selection problem. IEEE Signal Processing Letters, 28, 284–288. DOI 10.1109/LSP.2021.3050708. [Google Scholar] [CrossRef]
10. Nagata, T., Nonomura, T., Nakai, K., Yamada, K., Saito, Y. et al. (2021). Data-driven sparse sensor selection based on A-optimal design of experiment with ADMM. IEEE Sensors Journal, 21(13), 15248–15257. DOI 10.1109/JSEN.2021.3073978. [Google Scholar] [CrossRef]
11. Chaturantabut, S., Sorensen, D. C. (2010). Nonlinear model reduction via discrete empirical interpolation. SIAM Journal on Scientific Computing, 32(5), 2737–2764. DOI 10.1137/090766498. [Google Scholar] [CrossRef]
12. Drmac, Z., Gugercin, S. (2016). A new selection operator for the discrete empirical interpolation method–improved a priori error bound and extensions. SIAM Journal on Scientific Computing, 38(2), A631–A648. DOI 10.1137/15M1019271. [Google Scholar] [CrossRef]
13. Peherstorfer, B., Drmac, Z., Gugercin, S. (2020). Stability of discrete empirical interpolation and gappy proper orthogonal decomposition with randomized and deterministic sampling points. SIAM Journal on Scientific Computing, 42(5), A2837–A2864. DOI 10.1137/19M1307391. [Google Scholar] [CrossRef]
14. Astrid, P., Weiland, S., Willcox, K., Backx, T. (2008). Missing point estimation in models described by proper orthogonal decomposition. IEEE Transactions on Automatic Control, 53(10), 2237–2251. DOI 10.1109/TAC.2008.2006102. [Google Scholar] [CrossRef]
15. Barrault, M., Maday, Y., Nguyen, N. C., Patera, A. T. (2004). An ‘empirical interpolation’ method: Application to efficient reduced-basis discretization of partial differential equations. Comptes Rendus Mathematique, 339(9), 667–672. DOI 10.1016/j.crma.2004.08.006. [Google Scholar] [CrossRef]
16. Carlberg, K., Farhat, C., Cortial, J., Amsallem, D. (2013). The gnat method for nonlinear model reduction: Effective implementation and application to computational fluid dynamics and turbulent flows. Journal of Computational Physics, 242, 623–647. DOI 10.1016/j.jcp.2013.02.028. [Google Scholar] [CrossRef]
17. Clark, E., Askham, T., Brunton, S. L., Kutz, J. N. (2018). Greedy sensor placement with cost constraints. IEEE Sensors Journal, 19(7), 2642–2656. DOI 10.1109/JSEN.2018.2887044. [Google Scholar] [CrossRef]
18. Clark, E., Kutz, J. N., Brunton, S. L. (2020). Sensor selection with cost constraints for dynamically relevant bases. IEEE Sensors Journal, 20(19), 11674–11687. DOI 10.1109/JSEN.2020.2997298. [Google Scholar] [CrossRef]
19. Clark, E., Brunton, S. L., Kutz, J. N. (2021). Multi-fidelity sensor selection: Greedy algorithms to place cheap and expensive sensors with cost constraints. IEEE Sensors Journal, 21(1), 600–611. DOI 10.1109/JSEN.2020.3013094. [Google Scholar] [CrossRef]
20. Manohar, K., Kutz, J. N., Brunton, S. L. (2018). Optimal sensor and actuator selection using balanced model reduction. arXiv preprint arXiv: 1812.01574. [Google Scholar]
21. Saito, Y., Nonomura, T., Yamada, K., Nakai, K., Nagata, T. et al. (2021). Determinant-based fast greedy sensor selection algorithm. IEEE Access, 9, 68535–68551. DOI 10.1109/ACCESS.2021.3076186. [Google Scholar] [CrossRef]
22. Shamaiah, M., Banerjee, S., Vikalo, H. (2010). Greedy sensor selection: Leveraging submodularity. 49th IEEE Conference on Decision and Control, pp. 2572–2577. Atlanta, GA, USA, IEEE. DOI 10.1109/CDC.2010.5717225. [Google Scholar] [CrossRef]
23. Nakai, K., Yamada, K., Nagata, T., Saito, Y., Nonomura, T. (2021). Effect of objective function on data-driven greedy sparse sensor optimization. IEEE Access, 9, 46731–46743. DOI http://dx.doi.org/10.1109/ACCESS.2021.3067712. [Google Scholar] [CrossRef]
24. Yamada, K., Saito, Y., Nankai, K., Nonomura, T., Asai, K. et al. (2021). Fast greedy optimization of sensor selection in measurement with correlated noise. Mechanical Systems and Signal Processing, 158(6), 107619. DOI 10.1016/j.ymssp.2021.107619. [Google Scholar] [CrossRef]
25. Inoue, T., Matsuda, Y., Ikami, T., Nonomura, T., Egami, Y. et al. (2021). Data-driven approach for noise reduction in pressure-sensitive paint data based on modal expansion and time-series data at optimally placed points. Physics of Fluids, 33(7), 77105. DOI 10.1063/5.0049071. [Google Scholar] [CrossRef]
26. Kaneko, S., Ozawa, Y., Nakai, K., Saito, Y., Nonomura, T. et al. (2021). Data-driven sparse sampling for reconstruction of acoustic-wave characteristics used in aeroacoustic beamforming. Applied Sciences, 11(9), 4216. DOI 10.3390/app11094216. [Google Scholar] [CrossRef]
27. Kanda, N., Nakai, K., Saito, Y., Nonomura, T., Asai, K. (2021). Feasibility study on real-time observation of flow velocity field by sparse processing particle image velocimetry. Transactions of the Japan Society for Aeronautical and Space Sciences, 64(4), 242–245. DOI 10.2322/tjsass.64.242. [Google Scholar] [CrossRef]
28. Saito, Y., Nonomura, T., Nankai, K., Yamada, K., Asai, K. et al. (2020). Data-driven vector-measurement-sensor selection based on greedy algorithm. IEEE Sensors Letters, 4, 7002604. DOI 10.1109/LSENS.2020.2999186. [Google Scholar] [CrossRef]
29. Horn, R. A., Johnson, C. R. (2012). Matrix analysis. UK: Cambridge University Press. [Google Scholar]
30. Anderson, M., Ballard, G., Demmel, J., Keutzer, K. (2011). Communication-avoiding QR decomposition for GPUs. 2011 IEEE International Parallel & Distributed Processing Symposium, pp. 48–58. Anchorage, AK, USA, IEEE. DOI 10.1109/IPDPS.2011.15. [Google Scholar] [CrossRef]
31. Nankai, K., Ozawa, Y., Nonomura, T., Asai, K. (2019). Linear reduced-order model based on PIV data of flow field around airfoil. Transactions of the Japan Society for Aeronautical and Space Sciences, 62(4), 227–235. DOI 10.2322/tjsass.62.227. [Google Scholar] [CrossRef]
32. Loiseau, J. C., Noack, B. R., Brunton, S. L. (2018). Sparse reduced-order modelling: Sensor-based dynamics to full-state estimation. Journal of Fluid Mechanics, 844, 459–490. DOI 10.1017/jfm.2018.147. [Google Scholar] [CrossRef]
33. NOAA/OAR/ESRL Physical Sciences Laboratory (2019). NOAA optimum interpolation (OI) sea surface temperature (SST) V2. https://psl.noaa.gov/data/gridded/data.noaa.oisst.v2.html. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |