| Computer Modeling in Engineering & Sciences |
DOI: 10.32604/cmes.2022.019855
ARTICLE
Modeling and Analyzing for a Novel Continuum Model Considering Self-Stabilizing Control on Curved Road with Slope
1School of Energy and Power Engineering, Shandong University, Jinan, 250061, China
2School of Control Science and Engineering, Shandong University, Jinan, 250061, China
3Department of Logistics Management, Ningbo University of Finance and Economics, Ningbo, 315175, China
*Corresponding Author: Zihao Wang. Email: wangzihao621@mail.sdu.edu.cn
Received: 20 October 2021; Accepted: 12 November 2021
Abstract: It is essential to fully understand master the traffic characteristics of the self-stabilizing control effect and road characteristics to ensure the regular operation of transportation. Traffic flow on curved roads and slopes is irregular and more complicated than that on the straight road. However, most of the research only considers the effect of self-stabilizing in the straight road. This study attempts to bridge this deficiency from the following three aspects. First, we review the potential influencing factors of traffic flow stability, which are related to the vehicle's steady velocity, history velocity, and the turn radius of the road and the slope of the road. Based on the above review, an extended continuum model accounting for the self-stabilizing effect on a curved road with slope is proposed. Second, the linear stability criterion of the new model is derived by applying linear stability theory, and the neutral stability curve is obtained in detail. The modified KdV equation describing the evolution characteristics of traffic congestion is derived by using the nonlinear analysis method. Upon the theoretical analysis, the third aspect focuses on simulating the self-stabilizing effect under different slopes and radius, which demonstrates that the self-stabilizing effect is conducive to reducing congestion of the curved road with slope.
Keywords: Traffic flow; KdV equation; self-stabilizing effect; gradient highway; curved road
The accelerated development of modern intelligent transportation system not only alleviates traffic congestion, but also improves the stability of the transportation system [1–5]. However, the stability of traffic system is also easily affected by various driver characteristics, such as self-stabilizing, memory, backward-looking, and road geometry (e.g., slope and curved road). Therefore, it is a critical and urgent task to improve the stability of traffic flow by fully considering the driver characteristics and road geometry.
Generally speaking, there are three types of traffic models: microscopic models [6–12], lattice models [13–20], and macroscopic hydrodynamic models [21–27]. The macro model mainly refers to the continuous medium model of traffic flow, which regards a large number of vehicles as compressible continuous medium and studies the comprehensive average behavior of the vehicle group. This type of model tries to characterize the traffic flow with the average density
Traffic flow theory has been the focus of scientific research since it was put forward. Countless scientific and technological workers have devoted a lot of effort to exploration and research. Jiang et al. [33] proposed a full velocity difference model (FVDM) considering the positive and negative speed difference comprehensively. Zhang et al. proposed a macroscopic model considering the speed difference between adjacent vehicles on the slope [34]. Sun et al. developed an extended micro model is proposed considering the driver's desire for smooth driving on a curved road [35]. Gong et al. [36] designed a hybrid system and simulated human driving and autonomous vehicles. By using Gamma-convergence, it is proved that the optimal control problem of the mean-field can be solved at the microscopic level. Peng et al. analyzed the impact of self-stabilization on traffic stability considering the current lattice's historic flux for a two-lane freeway [37]. Although these papers attempt to use simulation platforms to develop vehicle dynamics models, they did not connect driver characteristics with geometric characteristics of the road. Therefore, this study attempts to bridge this critical defect.
The paper is organized as follows: Section 2 proposes a new continuum model considering the effect of self-stabilizing is constructed on the curved road with slope. Sections 3 and 4 present the linear and nonlinear analysis, and then the neutral stability curve and the KdV equation describing the nonlinear density wave are obtained. Section 5 carries out numerical experiments that demonstrate how the stability of traffic flow is affected by self-stabilizing, curved and slopes. Finally, the concludes are provided in Section 6.
2 The Extended Continuum Traffic Flow Model
In 2001, Jiang et al. [33] proposed the FVDM to solve the problem of vehicle retrogression based on previous studies. The model equation is
where the headway and velocity difference between two adjacent vehicles are
Based on the FVD model, Li et al. [38] proposed a new car-following model. They considered the impact of the driver's desire and the self-stabilizing control on traffic flow stability, and the extended model can be expressed as
where
For the sake of avoiding more fuel caused by frequent changes in driving speed during driving, drivers can hope to drive more smoothly. On account of the FVDM, Sun et al. [35] proposed a new car-following model of curve road and considered the impact of driver's desire on traffic flow stability, and the extended model can be expressed as
where
Zhou et al. [39] consider a situation such that vehicles are running on a single-lane gradient highway under a periodic boundary condition, which is described in Fig. 1. Fig. 1 shows the gravitational force acts upon vehicles on the slope of the gradient.

Figure 1: Vehicles move on a gradient highway: uphill and downhill situation: uphill − and downhill +
Kaur et al. [40] make full use of road geometry to study driver's anticipation effect and further presented a new lattice model as follows:
where
Through research on driver characteristics and control signals, the stability of traffic flow can be improved to a certain extent under certain conditions. However, road geometric characteristics also affect the stability of traffic flow, allowing of no to neglect. Distinguished with traditional studies, a modified car-following model on a single-lane gradient highway with curved is proposed with the consideration of the self-stabilizing effect as follows:
where
The highlight of our proposed model is to study the influence of self-stabilizing control and curved road with the slope on traffic flow stability from a macro perspective. Here, we can convert the micro variables in Eq. (8) into macro variables through the method proposed by Liu et al. [41], as follows:
where
For simplification, we carry out time first-order Taylor expansion for
Substituting macro variables into Eq. (8), we derive
In the literature, the theory of fluid dynamics is used to describe the traffic flow state, and its continuity fluid dynamics equation is established to study [42,43]. By combining the above formula with the continuous conservative equation, we have
The equations are rewritten into matrices to simplify the analysis as follows:
where
According to Eq. (14), it is obvious that the average velocity
Slight interference caused by driver behavior characteristics or external factors will spread upward with the traffic flow, and the traffic-free flow will develop into congestion flow gradually. If the slight disorder tends to be stable or disappear, the traffic flow can run smoothly, therefore controlling traffic congestion. Assuming that the traffic system is a homogeneous flow at the initial time, constants
By substituting Eq. (16) into Eq. (12) and neglecting the nonlinear higher-order terms, we obtain the following equation:
The necessary and sufficient condition for the stability of linear systems is that the determinant of matrix coefficients returns to zero, i.e.,
Regarding
According to the criterion of control theory, the neutral stable condition for the traffic flow is obtained
Performing the Taylor expansion for
According to Eq. (21), we infer that
This is similar to the velocity gradient model [44] and modified model.
The neutral stability lines for different slopes of the gradient road are plotted in Fig. 2. The neutral stability curves for uphill and downhill situations on the road, respectively, as shown in the illustration. In Fig. 2a, the stability region becomes more significant and more prominent with the addition of slope

Figure 2: Neutral stability lines for different slopes in two situations: patterns (a) and (b) are corresponding to uphill and downhill situations respectively
For the sake of explore the nonlinear analysis of the new model, we adopt a new coordinate system as follows [33]:
By substituting Eq. (23) into (12), we obtain the following equation:
Here, traffic flow is defined as the product of density and velocity of traffic flow as
Applying second-order Taylor expansion to
Substituting the Eq. (25) into the second row of Eq. (12), it can be written as
The coefficients
Eq. (26) can be rewritten with Taylor expansions near the neutral stability condition
Substituting the Eq. (24) into Eq. (29), and turning the
Aiming at obtaining the standard KdV-Burgers equation, we perform the following transformations:
Considering Eq. (24), the KdV-Burgers equation is obtained as follows:
One analytical solution of the above KdV-Burgers equation is
in which
This section presents simulation studies to illustrate the effect of self-stabilizing of our developed dynamic model on a single-lane highway with slope. According to the time forward difference and space centre difference, the space and time are divided into space step
where
5.1 Shock Waves and Rarefaction Waves
Traffic wave is a kind of nonlinear wave, which can evolve into so-called “traffic shock” as time goes on. Therefore, we study the influence of small disturbance on the spatiotemporal evolution of density and velocity under crowding and sparsity. The Riemann initial conditions are considered as follows:
where
Then, we adopted equilibrium velocity function by Castillo et al. [45] as follows:
where

Figure 3: The shock wave in the initial Riemann condition (36): (a) time-space evolution of density and (b) time-space evolution of speed
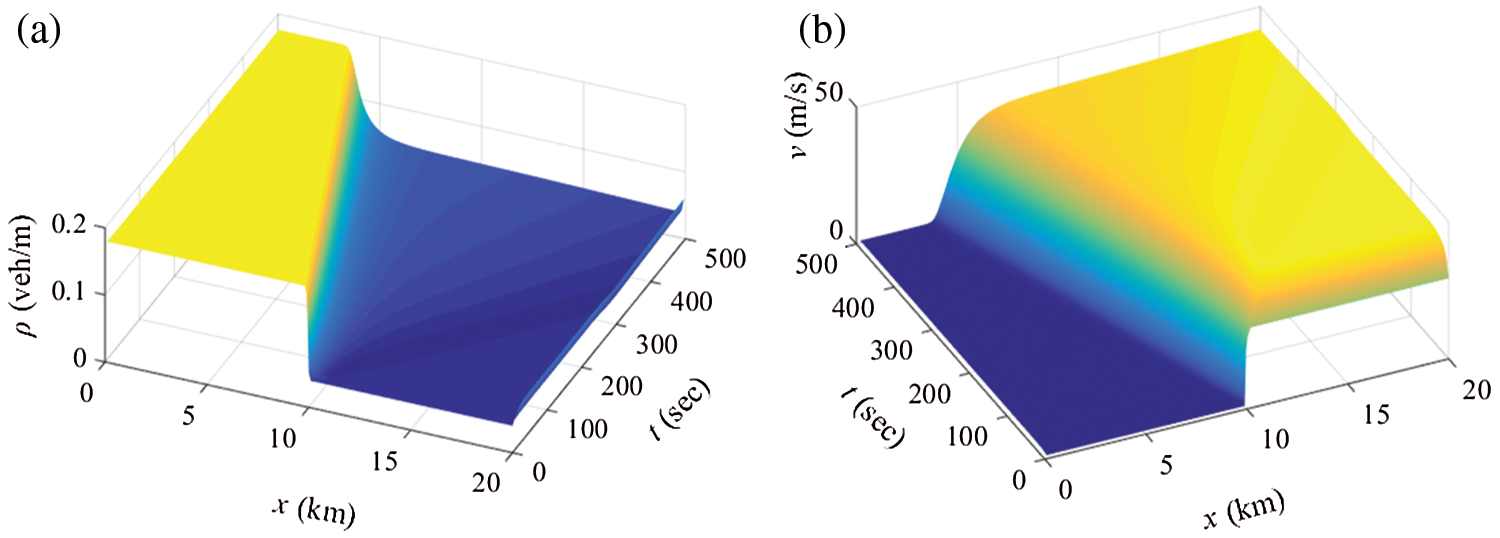
Figure 4: The rarefaction wave in the initial Riemann condition (37): (a) time-space evolution of density and (b) time-space evolution of speed
In this section, for clarity, we will verify the effects of self-stabilizing control strategy and different slopes and radius by conducting numerical simulation. The traditional method of stability simulation is to check the anti-disturbance ability of homogeneous traffic flow. In the literature [46], the average density
where the road length
Based on Kerner et al. [47], we introduce the equilibrium speed-density relationship as follows:
First of all, Fig. 5 is the nonlinear density wave of traffic flow with self-stabilizing control in the proposed macro traffic model on the uphill and downhill slope with curved roads. Figs. 5a–5c are the uphill angle, when the road slope is sight, the influence of minor disturbance on the stability of traffic flow will not be amplified. However, Figs. 5e–5g are the downhill angle, with the increase of slope angle, the impact of disruption is more and more prominent, and the traffic flow is more unstable. Therefore, with the change of a time, there will be time stop effect or traffic flow cluster effect.

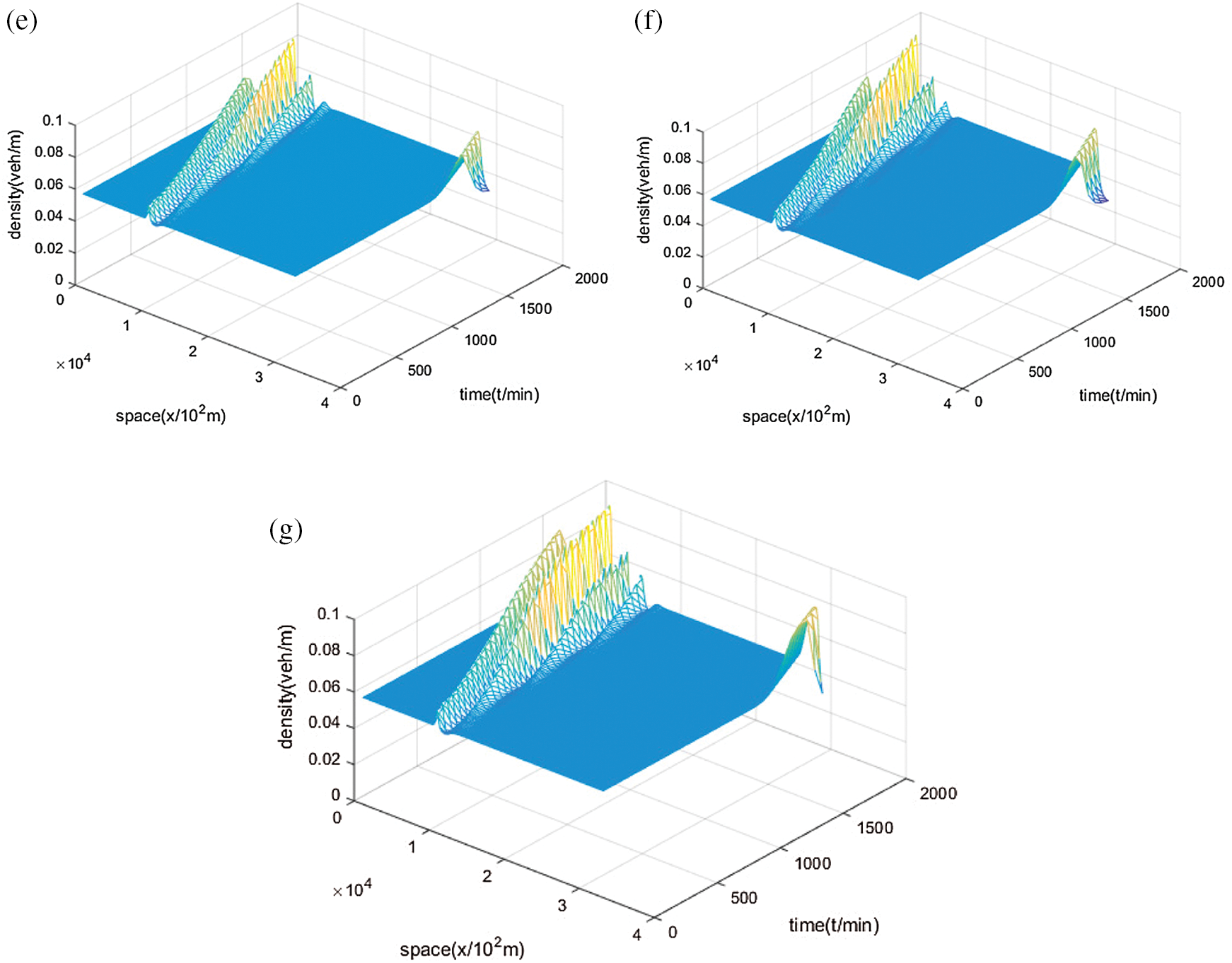
Figure 5: The evolution of the temporal and spatial on a downhill scenario with different
To explore the second case of road geometric characteristics: the influence of curve on traffic flow, our numerical simulation is shown in Fig. 6. It shows the evolution of traffic flow density with different curved road radii. Numerical simulation shows that when other conditions remain unchanged, the radius is large, the centripetal force is large, and the traffic flow is more unstable. It can be proved that the larger curve radius has a negative influence on the traffic stability.
Next, we explore the effect of self-stabilizing control strategy on traffic flow stability as Fig. 7. It shows that with the increasing control coefficient, the nonlinear density wave of traffic flow becomes more stable, which indicates that the stop and go phenomenon gradually disappears. Numerical simulation results illustrate that the effect of self-stability is helpful to improve the stability of traffic flow.


Figure 6: Space-time evolution of the headway for different radius


Figure 7: Space-time evolution of the headway for different
This paper introduces the effect of self-stabilizing control strategy and road geometric characteristics on traffic flow stability from a macro perspective. According to the maximum limit of the actual road slopes, different slope
Funding Statement: This work is supported by the Natural Science Foundation of Zhejiang Province, China (Grant No. LY19A010002).
Conflicts of Interest: We declare that we have no financial and personal relationships with other people or organizations that can inappropriately influence our work, there is no professional or other personal interest of any nature or kind in any product, service and/or company that could be construed as influencing the position presented in the manuscript entitled “Modeling and analyzing for a novel continuum model considering self-stabilizing control on curved road with slope”.
1. Liu, W. L., Gong, Y. J., Chen, W. N., Zhang, J., Dou, Z. (2021). An agile vehicle-based dynamic user equilibrium scheme for urban traffic signal control. IET Intelligent Transport Systems, 15, 619–634. DOI 10.1049/itr2.12049. [Google Scholar] [CrossRef]
2. Wu, Z., Liao, H. C., Liu, K. Y., Zavadskas, E. K. (2021). Soft computing techniques and their applications in intelligent industrial control systems: A survey. International Journal of Computers Communications & Control, 16, 4142. [Google Scholar]
3. Veres, M., Moussa, M. (2020). Deep learning for intelligent transportation systems: A survey of emerging trends. IEEE Transactions on Intelligent Transportation Systems, 21, 3152–3168. DOI 10.1109/TITS.6979. [Google Scholar] [CrossRef]
4. Zhang, H., Lu, X. X. (2020). Vehicle communication network in intelligent transportation system based on Internet of Things. Computer Communications, 160, 799–806. DOI 10.1016/j.comcom.2020.03.041. [Google Scholar] [CrossRef]
5. Mu, S. D., Xiong, Z. X., Tian, Y. X. (2019). Intelligent traffic control system based on cloud computing and big data mining. IEEE Transactions on Industrial Informatics, 15, 6583–6592. DOI 10.1109/TII.9424. [Google Scholar] [CrossRef]
6. Zhang, J. J., Wang, Y. P., Lu, G. Q. (2019). Impact of heterogeneity of car-following behavior on a rear-end crash risk. Accident; Analysis and Prevention, 125, 275–289. DOI 10.1016/j.aap.2019.02.018. [Google Scholar] [CrossRef]
7. Yao, Z. H., Xu, T. R., Jiang, Y. S., Hu, R. (2021). Linear stability analysis of heterogeneous traffic flow considering degradations of connected automated vehicles and reaction time. Physica A: Statistical Mechanics and its Applications, 561, 125218. DOI 10.1016/j.physa.2020.125218. [Google Scholar] [CrossRef]
8. Jin, Y. F., Meng, J. W. (2020). Dynamical analysis of an optimal velocity model with time-delayed feedback control. Communications in Nonlinear Science and Numerical Simulation, 90, 105333. DOI 10.1016/j.cnsns.2020.105333. [Google Scholar] [CrossRef]
9. Wang, X., Jiang, R., Li, L., Lin, Y. L., Wang, F. Y. (2019). Long memory is important: A test study on deep-learning based car-following model. Physica A: Statistical Mechanics and its Applications, 514, 786–795. DOI 10.1016/j.physa.2018.09.136. [Google Scholar] [CrossRef]
10. Jiang, N., Yu, B., Cao, F., Dang, P. F., Cui, S. H. (2021). An extended visual angle car-following model considering the vehicle types in the adjacent lane. Physica A: Statistical Mechanics and its Applications, 566, 125665. DOI 10.1016/j.physa.2020.125665. [Google Scholar] [CrossRef]
11. Xu, X. Y., Wang, X. S., Wu, X. B., Hassanin, O., Chai, C. (2021). Calibration and evaluation of the responsibility-sensitive safety model of autonomous car-following maneuvers using naturalistic driving study data. Transportation Research Part C--Emerging Technologies, 123, 102988. DOI 10.1016/j.trc.2021.102988. [Google Scholar] [CrossRef]
12. Tian, J. F., Zhu, C. Q., Chen, D. J., Jiang, R., Wang, G. Y. et al. (2021). Car following behavioral stochasticity analysis and modeling: Perspective from wave travel time. Transportation Research Part B--Methodological, 143, 160–176. DOI 10.1016/j.trb.2020.11.008. [Google Scholar] [CrossRef]
13. Jiang, C. T., Cheng, R. J., Ge, H. X. (2018). An improved lattice hydrodynamic model considering the “backward looking” effect and the traffic interruption probability. Nonlinear Dynamics, 91, 777–784. DOI 10.1007/s11071-017-3908-0. [Google Scholar] [CrossRef]
14. Wu, X., Zhao, X. M., Song, H. S., Xin, Q., Yu, S. W. (2019). Effects of the prevision relative velocity on traffic dynamics in the ACC strategy. Physica A: Statistical Mechanics and its Applications, 515, 192–198. DOI 10.1016/j.physa.2018.09.172. [Google Scholar] [CrossRef]
15. Wang, J. F., Sun, F. X., Ge, H. X. (2019). An improved lattice hydrodynamic model considering the driver's desire of driving smoothly. Physica A: Statistical Mechanics and its Applications, 515, 119–129. DOI 10.1016/j.physa.2018.09.155. [Google Scholar] [CrossRef]
16. Zhai, C., Wu, W. T. (2021). Designing continuous delay feedback control for lattice hydrodynamic model under cyber-attacks and connected vehicle environment. Communications in Nonlinear Science and Numerical Simulation, 95, 105667. DOI 10.1016/j.cnsns.2020.105667. [Google Scholar] [CrossRef]
17. Zhang, Y. C., Zhao, M., Sun, D. H. (2021). Analysis of mixed traffic with connected and non-connected vehicles based on lattice hydrodynamic model. Communications in Nonlinear Science and Numerical Simulation, 94, 105541. DOI 10.1016/j.cnsns.2020.105541. [Google Scholar] [CrossRef]
18. Madaan, N., Sharma, S. (2021). A lattice model accounting for multi-lane traffic system. Physica A: Statistical Mechanics and its Applications, 564, 125446. DOI 10.1016/j.physa.2020.125446. [Google Scholar] [CrossRef]
19. Zhang, Y. C., Zhao, M., Sun, D. H. (2021). A new feedback control scheme for the lattice hydrodynamic model with drivers’ sensory memory. International Journal of Modern Physics C, 32, 2150022. DOI 10.1142/S0129183121500224. [Google Scholar] [CrossRef]
20. Pan, D. B., Zhang, G., Jiang, S. (2021). Delay-independent traffic flux control for a discrete-time lattice hydrodynamic model with time-delay. Physica A: Statistical Mechanics and its Applications, 563, 125440. DOI 10.1016/j.physa.2020.125440. [Google Scholar] [CrossRef]
21. Wang, Z. H., Cheng, R. J., Ge, H. X. (2019). Nonlinear analysis of an improved continuum model considering mean-field velocity difference. Physics Letters A, 383, 622–629. DOI 10.1016/j.physleta.2019.01.011. [Google Scholar] [CrossRef]
22. Wang, Z. H., Ge, H. X., Cheng, R. J. (2018). Nonlinear analysis for a modified continuum model considering driver's memory and backward looking effect. Physica A: Statistical Mechanics and its Applications, 508, 18–27. DOI 10.1016/j.physa.2018.05.072. [Google Scholar] [CrossRef]
23. Wang, Z. H., Ge, H. X., Cheng, R. J. (2020). An extended macro model accounting for the driver's timid and aggressive attributions and bounded rationality. Physica A: Statistical Mechanics and its Applications, 540, 122988. DOI 10.1016/j.physa.2019.122988. [Google Scholar] [CrossRef]
24. Tang, T. Q., Shi, W. F., Huang, H. J., Wu, W. X., Song, Z. Q. (2019). A Route-based traffic flow model accounting for interruption factors. Physica A: Statistical Mechanics and its Applications, 514, 767–785. DOI 10.1016/j.physa.2018.09.098. [Google Scholar] [CrossRef]
25. Kawecki, D., Nowack, B. (2020). A proxy-based approach to predict spatially resolved emissions of macro-and microplastic to the environment. Science of the Total Environment, 748, 141137. DOI 10.1016/j.scitotenv.2020.141137. [Google Scholar] [CrossRef]
26. Mei, Y. R., Zhao, X. Q., Qian, Y. Q., Xu, S. Z., Ni, Y. C. et al. (2019). Analyses of self-stabilizing control strategy effect in macroscopic traffic model by utilizing historical velocity data. Communications in Nonlinear Science and Numerical Simulation, 74, 55–68. DOI 10.1016/j.cnsns.2019.02.017. [Google Scholar] [CrossRef]
27. Molnar, T. G., Upadhyay, D., Hopka, M. (2021). Delayed lagrangian continuum models for on-board traffic prediction. Transportation Research Part C--Emerging Technologies, 123, 102991. DOI 10.1016/j.trc.2021.102991. [Google Scholar] [CrossRef]
28. Lighthill, M. J., Whitham, G. B. (1955). On kinematic waves. I. Flood movement in long rivers. Proceedings of the Royal Society of London Series A, 229, 281–316. [Google Scholar]
29. Lighthill, M. J., Whitham, G. B. (1955). On kinematic waves. II. A theory of traffic flow on long crowded roads. Proceedings of the Royal Society of London Series A, 229, 317–345. [Google Scholar]
30. Richards, P. I. (1955). Shock waves on the highway. Operation Research, 4, 42–51. DOI 10.1287/opre.4.1.42. [Google Scholar] [CrossRef]
31. Payne, H. J. (1971). Models of freeway traffic and control. Mathematical Methods of Publish Systems, 1, 51–61. [Google Scholar]
32. Whitham, G. B. (1974). Linear and nonlinear waves. John Wiley and Sons. [Google Scholar]
33. Jiang, R., Wu, Q. S., Zhu, Z. J. (2001). Full velocity difference model for a car-following theory. Physical Review E, 64, 017101. DOI 10.1103/PhysRevE.64.017101. [Google Scholar] [CrossRef]
34. Zhang, P., Xue, Y., Zhang, Y. C. (2020). A macroscopic traffic flow model considering the velocity difference between adjacent vehicles on uphill and downhill slopes. Modern Physics Letters B, 34, 2050217. DOI 10.1142/S0217984920502176. [Google Scholar] [CrossRef]
35. Sun, Y. Q., Ge, H. X., Cheng, R. J. (2019). An extended car-following model considering driver's desire for smooth driving on the curved road. Physica A: Statistical Mechanics and its Applications, 527, 121426. DOI 10.1016/j.physa.2019.121426. [Google Scholar] [CrossRef]
36. Gong, X. Q., Piccoli, B., Visconti, G. (2020). Mean-field of optimal control problems for hybrid model of multilane traffic. IEEE Control Systems Letters, 5, 1964–1969. DOI 10.1109/LCSYS.2020.3046540. [Google Scholar] [CrossRef]
37. Peng, G. H., Zhao, H. Z., Li, X. Q. (2019). The impact of self-stabilization on traffic stability considering the current lattice's historic flux for two-lane freeway. Physica A: Statistical Mechanics and its Applications, 515, 31–37. DOI 10.1016/j.physa.2018.09.173. [Google Scholar] [CrossRef]
38. Li, S. H., Wang, T., Cheng, R. J., Ge, H. X. (2020). An extended car-following model considering the driver's desire for smooth driving and self-stabilizing control with velocity uncertainty. Mathematical Problems in Engineering, 2020, 1–17. DOI 10.1155/2020/6614920. [Google Scholar] [CrossRef]
39. Zhou, J., Shi, Z. K., Cao, J. L. (2014). An extended traffic flow model on a gradient highway with the consideration of the relative velocity. Nonlinear Dynamics, 78, 1765–1779. DOI 10.1007/s11071-014-1553-4. [Google Scholar] [CrossRef]
40. Kaur, R., Sharma, S. (2018). Modeling and simulation of driver's anticipation effect in a two lane system on curved road with slope. Physica A: Statistical Mechanics and its Applications, 499, 110–120. DOI 10.1016/j.physa.2017.12.101. [Google Scholar] [CrossRef]
41. Liu, G. Q., Lyrintzis, A. S., Michalopoulos, P. G. (1998). Improved high-order model for freeway traffic flow. Traffic Flow Theory, 1644, 37–46. DOI 10.3141/1644-05. [Google Scholar] [CrossRef]
42. Sidwell, T., Beer, S., Casleton, K., Ferguson, D., Woodruff, S. et al. (2006). Optically accessible pressurized research combustor for computational fluid dynamics model validation. Aiaa Journal, 44, 434–443. DOI 10.2514/1.15197. [Google Scholar] [CrossRef]
43. Richards, K. S. (2010). Simulation of flow geometry in a riffle pool stream. Earth Surface Processes & Landforms, 3, 345–354. DOI 10.1002/(ISSN)1096-9837. [Google Scholar] [CrossRef]
44. Jiang, R., Wu, Q., Zhu, Z. (2001). A new dynamics model for traffic flow. Chinese Science Bulletin, 46, 345–348. DOI 10.1007/BF03187201. [Google Scholar] [CrossRef]
45. Castillo, J. M. D., Benitez, F. G. (1995). On the functional form of the speed-density relationship—I: General theory. Transportation Research Part B: Methodological, 29, 373–389. DOI 10.1016/0191-2615(95)00008-2. [Google Scholar] [CrossRef]
46. Herrmann, M., Kerner, B. S. (1998). Local cluster effect in different traffic flow models. Physica A: Statistical Mechanics and its Application, 255, 163–188. DOI 10.1016/S0378-4371(98)00102-2. [Google Scholar] [CrossRef]
47. Kerner, B. S., Konhauser, P. (1993). Cluster effect in initially homogeneous traffic flow. Physical Review E, 48, 2335–2338. DOI 10.1103/PhysRevE.48.R2335. [Google Scholar] [CrossRef]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |