DOI:10.32604/cmc.2020.013458
| Computers, Materials & Continua DOI:10.32604/cmc.2020.013458 | |
| Article |
Enabling Smart Cities with Cognition Based Intelligent Route Decision in Vehicles Empowered with Deep Extreme Learning Machine
1School of Computational Sciences, Korea Institute for Advanced Study, Seoul, 02455, Korea
2Department of Computer Science, Lahore Garrison University, Lahore, 54000, Pakistan
3School of Computer Science, National College of Business Administration & Economics, Lahore, 54000, Pakistan
4Department of Unmanned Vehicle Engineering, Sejong University, Seoul, 05006, Korea
5Department of Information Technology, Khwaja Fareed University of Engineering and Information Technology, Rahim Yar Khan, 64200, Pakistan
*Corresponding Author: Muhammad Adnan Khan. Email: madnankhan@lgu.edu.pk
Received: 07 August 2020; Accepted: 21 August 2020
Abstract: The fast-paced growth of artificial intelligence provides unparalleled opportunities to improve the efficiency of various industries, including the transportation sector. The worldwide transport departments face many obstacles following the implementation and integration of different vehicle features. One of these tasks is to ensure that vehicles are autonomous, intelligent and able to grow their repository of information. Machine learning has recently been implemented in wireless networks, as a major artificial intelligence branch, to solve historically challenging problems through a data-driven approach. In this article, we discuss recent progress of applying machine learning into vehicle networks for intelligent route decision and try to focus on this emerging field. Deep Extreme Learning Machine (DELM) framework is introduced in this article to be incorporated in vehicles so they can take human-like assessments. The present GPS compatibility issues make it difficult for vehicles to take real-time decisions under certain conditions. It leads to the concept of vehicle controller making self-decisions. The proposed DELM based system for self-intelligent vehicle decision makes use of the cognitive memory to store route observations. This overcomes inadequacy of the current in-vehicle route-finding technology and its support. All the relevant route-related information for the ride will be provided to the user based on its availability. Using the DELM method, a high degree of precision in smart decision taking with a minimal error rate is obtained. During investigation, it has been observed that proposed framework has the highest accuracy rate with 70% of training (1435 samples) and 30% of validation (612 samples). Simulation results validate the intelligent prediction of the proposed method with 98.88%, 98.2% accuracy during training and validation respectively.
Keywords: DELM; ANN; IoT; feedforward; route decision; prediction; smart city
We all use automobiles to use appropriate routes for going from one place to another. The use of the Global Positioning System (GPS) [1] is important for effective travel in vehicles. This offers route information on all possible infrastructures, such as colleges, schools, road lights, junctions, traffic, the state of weather and roads [2]. The input route to the global positioning system may be speech patterns and user touch screens [3]. All these functions take advantage of the GPS vehicle navigation systems. Although there is a space segment composed of satellites, a control segment covering the ground stations and a user section consisting of the user and its GPS receiver, the navigation is still static, and therefore, no information is changed once the signals are lost [4]. The current on-board GPS navigation system in vehicles works by receiving signals from the satellites which detect their position using GPS components. The directional sensor also recognizes a vehicle’s path and the speed sensor recognizes its distance of journey. The detail is verified against the map repository and displays from the sensors and antenna on the computer of the car navigation device.
By increasing the vehicles awareness about their environments and evolving towards full independence, the concept of connected vehicles requires a new level of connectivity. The evolving vehicle network is, therefore, considered an important component for the growth of the intelligent transportation system and intelligent cities. A whole new set of technologies is supposed to be possible ranging from enhancing road safety to maximizing road performance, autonomous driving to all-round internet connections for vehicles [5–6]. The new network technology will have a deep impact on society and the lives of millions of people worldwide.
Meanwhile, vehicles have fast performance production, storage systems and advanced onboard sensors like light detection and range, radars and cameras, and are more than a simple means to transport. They create, capture, store, process and transmit huge data to make driving safer and easier, as shown in Fig. 1. Machine learning is an important factor in artificial intelligence, building smart devices of complex situations and has undergone many common implementations of computer vision, manipulating natural languages and robotics [7]. It establishes efficient methods for analyzing a vast amount of data in order to find trends and underlies that can support the future smart radio terminals [8].
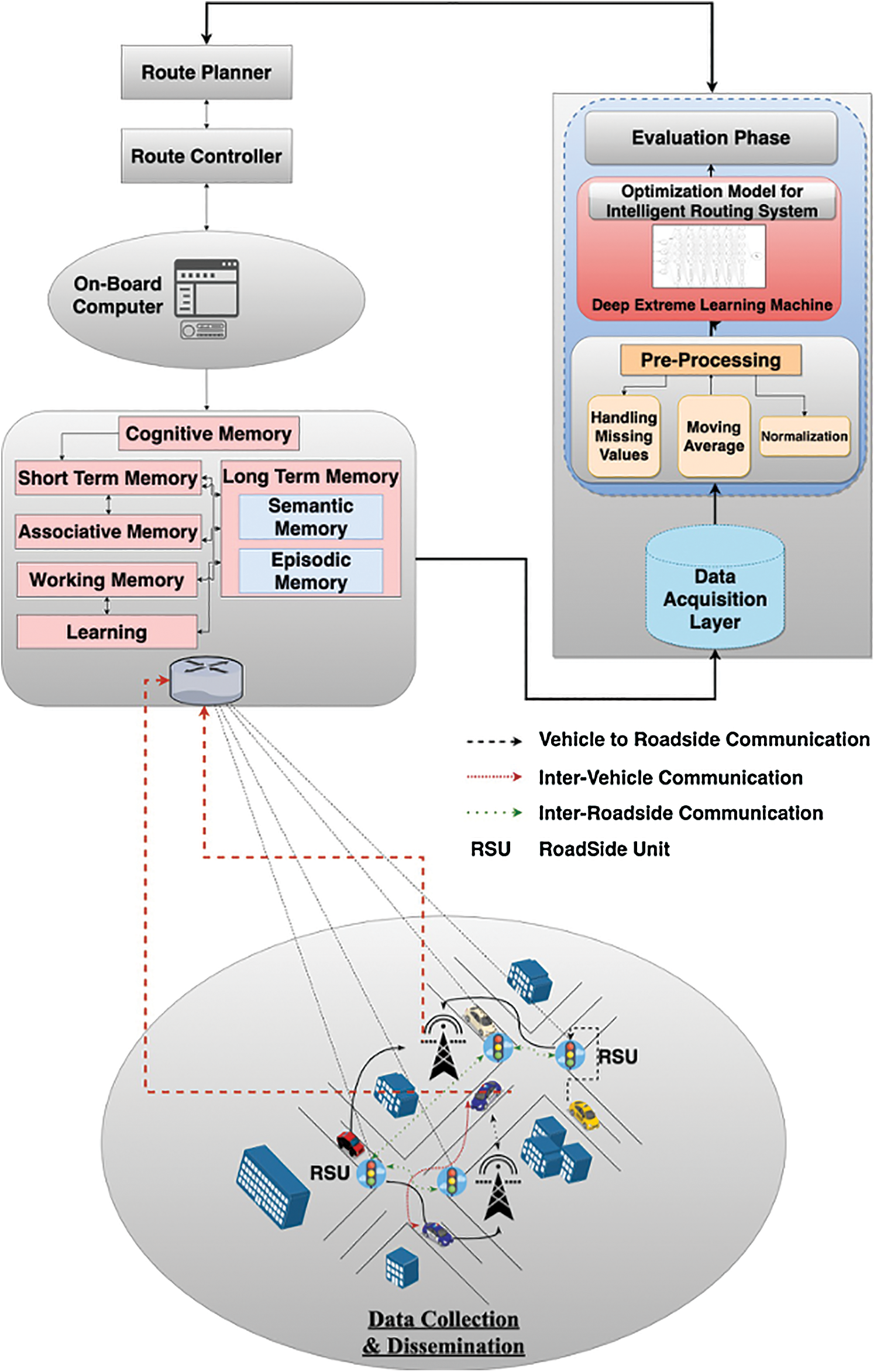
Figure 1: Proposed DELM based prediction model for intelligent route decision
The proposed framework devises to use cognitive approach in the vehicle and, therefore, it is important to use human cognition in vehicles to provide optimum routing knowledge [9]. This proposed framework overcomes the existing weakness in artificial intelligence strategies. In order to leverage human cognition within the vehicle field, a number of road defects such as optimum awareness, timely delivery, secure and safe roads and decision-making are hence critical. The best path is not always the shortest, but can be preferred instead if there is no traffic for a longer route. The farther a vehicle travels; the more road information it gets. Cognitive memories are relevant because each iteration (route) must be remembered and documented [10]. The concept of human memory in the form of working memories [11–12], short term memory and long-lasting memory is used in subcategories [13–15].
The study gives the user a cognitive structure that offers knowledge about the route to the user in a state-of-the-art and optimum way. For later rehabilitation, the information is remembered and preserved in cognitive memory. Like us, we human beings are restoring our memories and making better decisions, we suggest the same idea for the vehicle with regard to route information. In this proposed cognition-based framework for intelligent route decision in vehicles restores past encounters with the use of cognitive memory and takes better decisions. Nonetheless, information creation requires time, which in theory relies on a vehicle moving through various roads. The longer the vehicle drives, the more it flows into the reservoir of information. A deep extreme learning machine for routing analysis is studied in this article to obtain the maximum precision. In the training and testing of estimation of vehicular routing with deep learning, a data set [16] with 20148 variety of data samples are used, such that each sample has specific and distinct characteristics. As a consequence, the analysis and contrast are rendered with the state-of-the-art approaches in the same area.
Such research would benefit the public in particular of future intelligent communities through transformations from the people’s network to the Internet of Things (IoT). As per the European study collection for the Internet of Things, IoT is a lively, global network system through which physical and virtual artifacts can be detected and shared by standard and extensible processes [17]. Although IoT is supposed to be the best chance for a sustainable city existence [18].
Bakıcı et al. [19] argued that a smart city is a technological advancement-intensive and enhanced community, connecting people, data and urban facilities through advanced technology, creating a healthy, healthier community incorporating competitiveness and creative commerce, and enhancing quality of life. When people from a community like this through existing partnerships, they are acts as the core element of smart cities. This is why educated communities are regarded as the primary motivating factor behind smart cities; thus, in smart cities, literacy, schooling and connectivity are crucial approaches. Giffinger et al. [20] proposed that smart cities are smart societies in which various elements, such as people, culture, connectivity, infrastructure and the environment, are integrated into an intelligent system. The Internet of Things (IoT) conveys the promise of turning neighborhoods across the globe into “smart towns” by developing a modern environment for modern living [21]. Significant benefits include improved protection, wellness, upgrading schooling and housing conditions, electricity use, habitat and biodiversity sustainability, green economy and enhancing the job structure [22]. While the fundamental principle of smart cities has been around for about 10 years, but the term has made a lot of progress since it was launched in the early days, today the notion of fundamentally altering community existence is the introduction of various important enablers, such as the Internet of Things. The idea of smart cities is a clean, stable, environmentally-friendly and productive urban core for the long term because of all the systems such as electricity, water and transport.
The Internet of Things (IoT) is a combination of various physical gadgets, cars, scalable and one of the sorts integrated with electronics, programming, sensors, actuators, and accessibility that depends on the network and exchange of knowledge. On the other side, with a common end aim of getting IoT easier, lots of investigative developments are pushed into IoT, with some of the most significant innovations being Data Processing, Artificial Intelligence, Cloud Storage and Neural Networks. The smart city initiative is the most successful today. The World Health Organization (WHO) predictions and study forecasts that people will stay in urban areas in the future. The smart concept is used to build comfort in life. Smart city is an initiative that utilizes the new technologies to strengthen the efficiency of public life. Smart cities also boost environmental efficiency as well as provide residents with optimal amenities. Transmission and Computer technology is essential for fostering and turning urban areas into smart cities [23].
Like autonomous vehicles, smart City is a modern term, well developed and utilized by a variety of academics and organizations [24]. In brief, intelligent cities are designed to address or balance the problems raised by enhanced growth of city infrastructure and population, such as the usage of power, congestion and accessibility by optimum efficiency and the use of services. A number of classifications of smart city activity areas are contained in the literature [25]. The biggest downside to these definitions is that they categorize vehicles solely on the basis to roads, lacking certain relevant vehicle factors, such as smart route decisions. Modern living is also a significant obstacle in our everyday lives. At the other side, the aim is to create massive information and networking systems by leveraging the resources of the internet [26].
It is obvious that in smart city, smart vehicles will play its role. Involving driver psychological problems in Advanced Driver Assistance Systems (ADAS) makes it difficult to collect effective information. In order to measure a variety of driver tolerance levels, the lack and improved tests of an affordable model are required. Recent executive study is, therefore, debated concerning knowledge of lateral, quantitative and hybrid decisions [27]. The importance of Vehicle Ad-hoc Network (VANET) cognition improves the network performance as it adapts network variables dynamically. The transmission time and transmission frequency are called variables for cognitive radio for testing network performance. The cognitive radio also improves network performance [28]. For a machine to have cognitive capability, a cognitive model is essential and the self-driving car concept is one of those models for the vision, memory and attention strategies. The principle of conceptualizing the relationship between mind and body is essential from a cognitive perspective [29]. This focuses on the theories that are necessary to generate strong AI systems for various domains [30]. For example, in case of a car accident, cognitive variables should be taken into consideration regarding drivers like right-and-left illusion, adjustment to darkness, lighting effects caused by bright objects, vehicle perceptions, awareness and reaction time during the accident [31].
While computation and storage technologies have recently improved, most data-analytical methods reap the benefits of screening technologies that are time-efficient yet ignore a vast range of data that could include important knowledge models not seen in samples [32]. Information sets with several drawbacks can be used to achieve a perceptive study utilizing deep neural networks [33]. The most crucial aspect is that the IoT technology itself designed and evolves, it takes an ideal system called a middleware-level framework to allow smooth connectivity here among Machine-to-Machine based device and an established Internet-based infrastructure [34]. There are several study groups that propose cognitive approaches suitable to the specifications of IoT applications. Vlacheas et al. [35] proposed a cognitive control system that would allow smart objects to interact, while enabling more aware end-users.
Sensor and signal data machine learning is simpler than ever: hardware gets smaller and sensors get cheaper, making IoT devices widely available for a wide range of applications including predictive service and user activity monitoring [36]. When you use sounds, vibration, pictures, signals or accelerometers or other sensors, you can accumulate more expensive research by showing a machine to identify and organization incidents occurring continuously, on the edge of the process with an inexpensive microcontroller-even with noisy data, high variations [37]. Cognitive IoT is an independent study initiative to establish a theoretical framework for IoT applications [38]. The framework defines the partnership of five relational processes: perception-action process, mass processing of knowledge, conceptual derivation and exploration of knowledge, intelligent decision-making and on-demand service delivery [39]. The computational architecture for smart homes was developed on the base of cognitive processes [40].
Through this research study, a cognition-based route decision framework for automobiles for smart cities has been developed, which illustrates how deep extreme learning machine framework is used to enable native population with outstanding amenities. The Deep Extreme Learning Machine (DELM) based proposed module considers the response as an untenable route if incorrect entry is provided as an improper destination. Unless the car has approached the road before and had a prior event in its cognitive memory, the route information is assumed to be a route defined.
The remainder of this study is set out as follows. Section 2 lays forth the procedure for carrying out a systematic assessment for the estimation of an intelligent route decision. Section 3 addresses the application and implications of the DELM method. Section 4 addresses the findings of the research.
Smart City handles and monitors resources using integrated technology structures. To achieve optimal supply and productive use of urban properties, it is necessary to establish IoT-based technology to address the issues created by the technology. In addition, smart solutions are the key claims of a smart city for transit, housing, convenience, agriculture and the community.
In Fig. 1, connectivity between the vehicles is also known as communication between the vehicles (V2V) or mere ad hoc networking. Vehicles interact without infrastructure support among themselves in this group. Every valuable information obtained by vehicle sensors or transmitted to a vehicle can be transmitted to the nearby vehicles. Communication between vehicles on routes is also referred to as communication between vehicles and infrastructures (V2I). In this type, vehicles can connect to the internet via mobile gateways and the wireless local network access points. Inter-road communications are also known as hybrid communication between vehicles. Vehicles can communicate and share the information received from their infrastructure with other vehicles by means of ad hoc communications in peer-to-peer mode.
The path entry is considered to be a new route because the vehicle has not followed the route and thus has no sequence. The input of the route can be given by voice patterns, after which the route category can be evaluated with an initial check. The proposed work indicates that it falls into the category of existing road to the vehicle for expedition, i.e., the vehicle already has patterns in its memory. The expedition will conclude with the use of the vehicle’s cognitive memory. Cognitive memory information is useful, but updated information is essential for the provision of routes. For example, there are opportunities to develop new routes over time. Another function of the module is that if for some reason there is a failure of the vehicle’s communication system or node, route-side data is not available; vehicle cognitive memory information is used in these instances. While the knowledge may not be completely ideal, but adequate to execute a vehicle expedition in worst cases. What if vehicle memory has no road patterns, does that raise a question? In this scenario, a new route is considered, and vehicle communication systems with a third party (e.g., GPS, Road Side Units (RSUs) or another vehicle node) must also be involved. New route information will be provided by the third party.
In this context, the DELM dependent framework for the road assessment is introduced that handles road groups via cognitive memory perceptions. This cognitive memory will be included in any vehicle since it will improve routing information handling and processing almost like human activity. In Fig. 1, cognitive memory contains route data as origins, destinations, map, paths, etc. and is saved as a Long-Term Memory episode (LTM) for future use. Semantic memory provides route information significance while episodic memory stores the whole route information as episodes.
Associative memory allows the necessary episode to be found and to be properly combined by making correct associations. Sensory memory detects knowledge and generates Short Time Memory (STM). Functional memory stores knowledge in real time in decision taking. The transition role in the learning unit knows the entire decision-making process.
Fig. 1 demonstrates the overall scenario of intelligent route decisions in vehicles driven by a Deep Extreme Learning Machine (DELM). The actual information must then be transferred from cognitive memory to the data processing layer. The functional computational agent, focused on the methodology of a deep extreme learning machine, then provides a reaction focused on infrastructure device predictions (e.g., route decision in vehicles). The purpose behind this design is to intensify the interpretation of knowledge and perception when forwarding on knowledge through smart city networks.
The methodology suggested consists of three separate layers, namely data collection, pre-processing and implementation layer. There are two sub-layers in the application layer namely the predictive framework and the efficiency evaluation. Real information from cognitive memory were obtained. Data obtained from cognitive memory was given as input to the acquisition layer. Numerous data cleaning and analysis processes have been placed in order to remove irregularities from data in the pre-processing layer. Deep extreme learning machine (DELM) has been used in the application layer for in-vehicle route decision. DELM takes advantage of both extreme learning and deep learning strategies [41].
Fig. 1 shows the entire system process. For which layer of data processing includes input parameters, they must go to the neural network where an algorithm has been learned to determine the right route for vehicles. Artificial neural networks (ANN) will now be seen across all industries. The artificial neural network embraces of a uniquely structured community of neurons. Neurons and their associations are the core components of an artificial neural network. The neuron is a basic unit of information processing that provides the basis for the output of the Artificial Neural Network (ANN). Neurons are elements of the shared signaling that resolve a problem.
Fig. 1 shows the DELM based route decision module, which gives the driver optimal information on the route. The details on the input path will be provided by the vehicle’s onboard computing unit. DELM-based model processes the entire module and sends a signal to the route controller. Suitable naming tags by the route controller shall be assigned to the source and destination and provide tagged data to the route planner unit. It evaluates correct or incorrect information provided and it is done in comparison with a route profile. If incorrect input is detected, the driver is notified and directed to the correct route input. When correct route entry is provided the route, controller is updated. The right route category exists within the vehicle’s cognitive memory. If the previous path episode occurs, the cognitive memory shall be tested. If the path resides in your information repository, it is otherwise known as a new route. The route controller offers the defined path category through cognitive memory to the route planner Tagging by the route planner is carried out to correct the type of route. To this end, the Route Controller operates the module’s contact mechanism to connect with external entities. This external intervention is essential to obtain updated route information from external entities. The vehicle will be fitted with a range of wireless techniques including DSRC, Wi-Fi, Long Term Evolution Cellular (LTE) and Satellite Communications.
The vehicle interacts with external entities, including RSU(s) or vehicle nodes of the system. Updated route data are collected depending on their availability. Before it is processed in vehicular cognitive memory, the accumulated knowledge needs to be properly organized. The On-Board Unit (OBU) is presented with the new route details for a decision notifying the driver about the correct way. The driver considers the updated information on the routing at this point. The cognitive memory chooses to activate the process of taking from external entities a recent copy of road data. This knowledge now remains in the vehicle’s cognitive memory for future decision-making. An occurrence which is learned in the cognitive memory and eventually registered is this entire route input and route update process. In any route type, the vehicle’s cognitive memory uses the latest knowledge and stores it as episodes. The On-Board Unit (OBU) processes the received feedback from the route controller and the cognitive storage process.
A new approach from analysis is to overcome this resource constraint in order to use deeper neural model networks. There are also numerous strategies for deforming or deploying deep neural networks in recent years to power them to IoT, compact electronics and minimally capitalized smartdevices [42].
2.2 Deep Extreme Learning Machine
The Deep Extreme Learning Machine (DELM) methodology is being integrated in this study to render vehicles intelligent with IoT controlled sensors. Fig. 2 reveals that various numbers of hidden layers, multiple hidden neurons and numerous forms of activation functions were used in deep Extreme Learning Machine (DELM) to achieve the best framework for in-vehicle route decision.
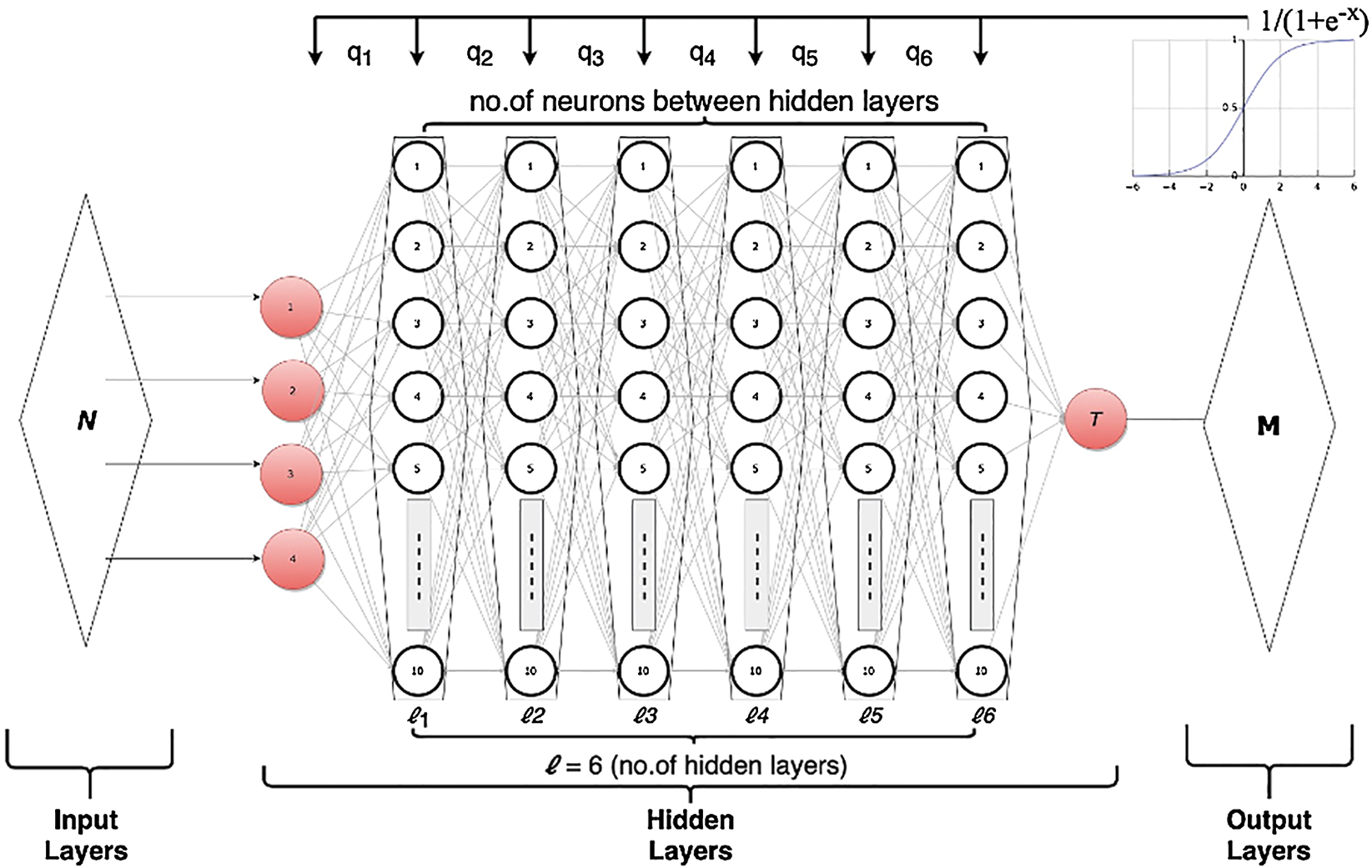
Figure 2: Structural of a deep extreme learning machine
The DELM is a popular system of forecasting health issues, predictions of electricity use, transport and traffic control, and so on [41,43,44]. Traditional artificial neural network algorithms need further calculations and long learning periods, so they may bypass the learning model [45]. The concept of an Extreme Learning Machine (ELM) was established by [46]. The DELM can be employed extensively for categorization and retrograde objectives in diverse contexts as it learns easily and succeeds in the rate of system complexity. Extreme learning machine is a feed-forward neural network, which implies that input only travels one direction across a set of layers, but we have also used the back-propagation approach in this predictive system during the training process, where information streams backward across the network and the back-propagation system of the network changes weights to reach high precision at a minimal error rate. Weights are constant during the validation stage of the network in which the qualified model is imported and the real data are predicted. The DELM architecture contains input layer, several hidden layers and one output layer. The DELM method is brought into action in the systemic manner in Fig. 2, where m represents input layer nodes, ℓ represents hidden layer nodes, and T indicates output layer nodes.
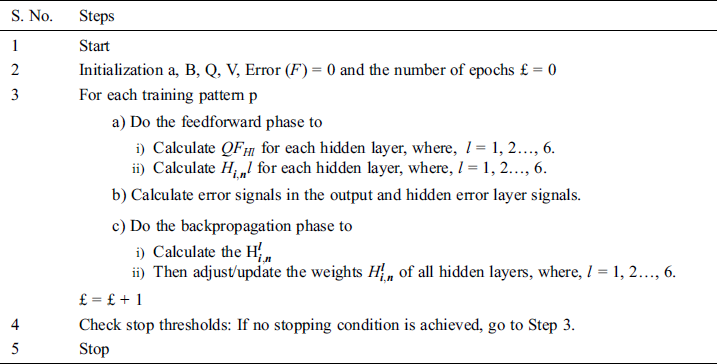
The deep extreme learning machine framework will be suggested for route decision in the application level. In the application layer, Mean Square Error (MSE) is measured for the predictive route decision to optimize vehicle routing in smart cities. In this study, 2048 data sets were trained and fitted with DELM [16]. The data is uniformly split into 70% of the training (1435 samples), and 30% of the dataset were employed for validation and testing (614 records). In Tab. 1 a pseudocode of suggested DELM of in-vehicle route decision is described.
Table 1: Pseudocode of suggested DELM centred prediction model for intelligent route decision
In the DELM structure, the  input, the
input, the  node, and the
node, and the  output node can be illustrated as
output node can be illustrated as  ,
,  , and
, and  , correspondingly. Though all the
, correspondingly. Though all the  input,
input,  hidden, and
hidden, and  output nodes can be illustrated as
output nodes can be illustrated as  ,
,  ,
,  , correspondingly. The DELM framework would therefore be efficiently interpreted as;
, correspondingly. The DELM framework would therefore be efficiently interpreted as;

and

where  ,
,  ,
,  , and the activation function
, and the activation function  . Assume that just
. Assume that just  different training records, and let
different training records, and let  and
and  signifies the
signifies the  training input and the subsequent
training input and the subsequent  training outcome, correspondingly, where
training outcome, correspondingly, where  . In the training samples the input classification and outcome classification can be presented as;
. In the training samples the input classification and outcome classification can be presented as;

and

accordingly. We should override Eq. (3) by Eq. (1) to get

where  is the assessment categorization of all
is the assessment categorization of all  hidden nodes, and
hidden nodes, and  Kronecker method. Then we can override Eqs. (5) and (4) in Eq. (2) to attain the real training implementation sequence.
Kronecker method. Then we can override Eqs. (5) and (4) in Eq. (2) to attain the real training implementation sequence.

In DELM, only the outcome weight  is adaptable, although
is adaptable, although  (i.e., the input weights) and
(i.e., the input weights) and  (i.e., the prejudices of the hidden nodes) are randomly adopted. Describe the expected outcome as
(i.e., the prejudices of the hidden nodes) are randomly adopted. Describe the expected outcome as  . Later DELM only reduces the evaluation error;
. Later DELM only reduces the evaluation error;

By seeking a minimal square answer  to this question,
to this question,

where  indicates the Frobenius norm.
indicates the Frobenius norm.
For the troublesome Eq. (8), the minimal square solution is exceptional;

The famous Tikhonov regularization can be used to try and avoid overfitting to change Eq. (9) into

where 
 signify the regularization term.
signify the regularization term.
The back-propagation method involves weight configuration, feed-forward propagation, backward error propagation and weight and distinguishability upgrade. An activation function as  =
= is present in the hidden layer on every neuron. This makes for the composition of the sigmoid input method and the DELM hidden layer;
is present in the hidden layer on every neuron. This makes for the composition of the sigmoid input method and the DELM hidden layer;

 j = Desired output
j = Desired output
 = Estimated output
= Estimated output
Eq. (11) uncovers a back-propagation tendency that can be established by subtracting the sum square from the targeted output by 2. To minimize the overall bias the weight adjustment is needed. The weight variance values for the production layer are seen in Eq. (12).

while i = 1, 2, 3…, 10
and j

write Eq. (13) Via the chain rule approach,

The shift weight will be done after the measurements have been substituted in Eq. (13) as illustrated in Eq. (14).

From  to
to 

The measurement for the correct weight change for the hidden weight is seen in the next section. This is additional complicated as it can contribute to faults on each node due to a weighted relation.
From  to
to  or
or  where
where 




where
The method used to boost weight and prejudice between performance and hidden layer is seen in Eq. (15e).

Eq. (16) demonstrates how to change the weight and prejudice between the data and the hidden layer.

For this proposed article the deep extreme learning method was applied to data [16] and in this aspect, MATLAB was used for simulation. Python script has been applied in MATLAB to train data [16]. DELM has been used in this article to train and validate 2048 data sets. Data is arbitrarily classified into 70% training (1435 records), 30% of dataset was used for validation (614 reccords). Dataset has been analyzed in advance to eliminate system anomalies and to protect the database from errors. DELM sought to identify the right pattern for decision-making on a route for different hidden layers and hidden neurons. Consequently, the same number of neurons is calculated in hidden layers, different activation modes. For this study, we used the DELM to better estimate the efficacy of this algorithm. To calculate the output with the counterpart algorithms of this DELM algorithm, we also used numerous statistical analysis, described in Eqs. (17) and (18).
In Eq. (17),  reflects the projecting outcome of vehicle path and
reflects the projecting outcome of vehicle path and  reflects the real outcome.
reflects the real outcome.  and
and  signifies that there is no modification in vehicle path.
signifies that there is no modification in vehicle path.  and
and  represent the modification in prediction from the earlier series of the prognostic and real prediction correspondingly.
represent the modification in prediction from the earlier series of the prognostic and real prediction correspondingly.  signifies prognostic and real output are similar. Likewise,
signifies prognostic and real output are similar. Likewise,  signifies error, in which prognostic and real outcome of route decision are diverse.
signifies error, in which prognostic and real outcome of route decision are diverse.

where j = 1, 2, 3





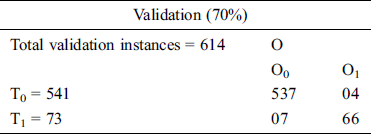
For the collection of data [16], The DELM approach was used and the findings were seen in Tabs. 2 and 3. As shown in the Tab. 2, 70% of data (1435 samples) was obtained for dataset training [16]. Two negative (0) and positive (1) outputs are expected. The negative (0) outcome has confirmed that the direction will not be altered and the optimistic (1) outcome has indicated that the route will be modified. Tab. 2 indicates that test (1435 test samples) during training were supposed to produce (1265 negative instances) and (170 positive instances). Upon training on (1435 test records), we obtain the product of (1260 records) negative outcome and (05 records) positive outcome. Tab. 3 shown that 30% of data (614 samples) are used for validation purpose. It observed that 537, 66 samples are correctly identified from the proposed DELM based solution during validation in case of negative as well as positive samples respectively.
Table 2: Training accuracy of the suggested DELM method during the prediction of route decision in vehicles
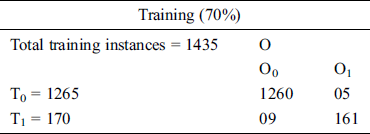
Table 3: Validation accuracy of the suggested DELM method during the prediction of route decision in vehicles
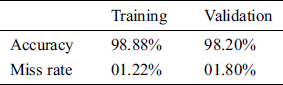
Tab. 4 shows the performance of suggested DELM method in terms of accuracy and miss rate. It observed that proposed DELM based system gives 98.88%, 98.20% accuracy and 1.22%, 1.80% miss rate during training & validation respectively.
Table 4: Accuracy of the suggested DELM method during the prediction of route decision in vehicles during training and validation
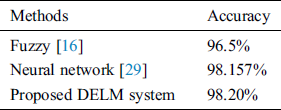
As seen in Tab. 5, the suggested solution focused on DELM outclasses other models in terms of precision, such as the Fuzzy & Neural Network [16]. The overall results for [16] were 98.157%, however, the proposed efficiency of the DELM approach was 98.20% which was better than the approaches previously suggested in view of accuracy level. The mathematical calculation values indicate that the efficiency of DELM is far better than that of the other techniques. The proposed DELM framework is therefore a significant option for smart route decisions in automobiles.
Table 5: Accuracy evaluation of the suggested DELM method with other state of the art techniques during the prediction of route decision
Modeling, analyzing and predicting smart route decisions in vehicles is a challenge. Through this study, a vehicle model was suggested to boost the precision of the smart route decision prediction. The suggested method is an expert architecture that is centered on a Deep Extreme Learning Machine (DELM) with a broad capacity to find the best routes for automobiles. Many hidden layer neurons were specified and various functions and features were used to adapt the DELM structure to diverse parameters.
Various mathematical methods have been used to assess the efficiency of the suggested solution. Such calculation results suggest that the suggested DELM solution is significantly better in precision relative to other algorithms. The proposed DELM methodology produces impressive outcomes compared to past approaches. The suggested methodology has a precision of 98.20%, which is much higher than the current techniques. In addition, it is recognized that the suggested solution provides an inexpensive computational complication. In the proposed study, DELM was used to summarize the advantages of ELM along with deep learning. We are sure of the early findings and plan to extend this research in the future by exploring various databases, learning devices, architectures and algorithms.
Acknowledgement: Thanks to our families & colleagues who supported us morally.
Funding Statement: This work is supported by the KIAS (Research Number: CG076601) and in part by Sejong University Faculty Research Fund.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Z. Liu. (2018). “A new approach for cycle slip detection and fix using single GPS receiver’s single satellite dual frequency data containing arbitrarily large pseudorange errors,” Journal of Global Positioning Systems, vol. 16, no. 1, pp. 5–6.
2. B. Zeeb, Q. Kong, J. Xia and E. Chang. (2013). “Development of landmark based routing system for in-car GPS navigation,” in 2013 7th IEEE Int. Conf. on Digital Ecosystems and Technologies, CA, USA, pp. 132–136.
3. S. Karpagavalli and E. Chandra. (2016). “A review on automatic speech recognition architecture and approaches,” International Journal of Signal Processing, Image Processing and Pattern Recognition, vol. 9, no. 4, pp. 393–404.
4. J. Jae-Hoon, K. Min and B. Gi-Sig. (2016). “Position recognition for an autonomous vehicle based on vehicle-to-LED infrastructure,” in Int. Conf. on Advanced Engineering Theory and Applications, Vancouver: Springer, pp. 913–921.
5. L. Liang, H. Peng, G. Y. Li and X. Shen. (2017). “Vehicular communications: A physical layer perspective,” IEEE Transactions on Vehicular Technology, vol. 66, no. 12, pp. 10647–10659.
6. H. Peng, L. Liang, X. Shen and G. Y. Li. (2017). “Vehicular communications: A network layer perspective,” IEEE Transactions on Vehicular Technology, vol. 68, no. 2, pp. 1064–1078.
7. J. Schmidhuber. (2015). “ Deep learning in neural networks: An overview,” Neural Networks, vol. 61, pp. 85–117.
8. C. Jiang, H. Zhang, Y. Ren, Z. Han, K. C. Chen et al.. (2017). , “Machine learning paradigms for next-generation wireless networks,” IEEE Wireless Communications, vol. 24, no. 2, pp. 98–105.
9. L. Li, D. Wen, N. N. Zheng and L. C. Shen. (2012). “Cognitive cars: A new frontier for ADAS research,” IEEE Transactions on Intelligent Transportation Systems, vol. 13, no. 1, pp. 395–407.
10. Y. Saeed, K. Ahmed, M. Lohi, S. Abbas and A. Ather. (2016). “Impact of cognition on user authentication scheme in vehicle using fuzzy logic and artificial neural network,” International Journal of Computer Science and Information Security, vol. 14, no. 10, pp. 285–296.
11. A. Horzyk, J. A. Starzyk and J. Graham. (2017). “Integration of semantic and episodic memories,” IEEE Transactions on Neural Networks and Learning Systems, vol. 28, no. 12, pp. 3084–3095.
12. T. Deutsch, A. Gruber, R. Lang and R. Velik. (2008). “Episodic memory for autonomous agents,” in 2008 Conf. on Human System Interactions, Krakow, Poland, pp. 621–626.
13. A. S. Souza and K. Oberauer. (2017). “Time to process information in working memory improves episodic memory,” Journal of Memory and Language, vol. 96, pp. 155–167.
14. C. Gallicchio. (2018). “Short-term memory of deep RNN,” in Proc. of 26th European Sym. on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANNBelgium, China, pp. 1–6.
15. L. Guo, Q. Wan, C. Wan, L. Zhu and Y. Shi. (2013). “Short-term memory to long-term memory transition mimicked in IZO homojunction synaptic transistors,” IEEE Electron Device Letters, vol. 34, no. 12, pp. 1581–1583.
16. Y. Saeed, K. Ahmed, M. Zareei, A. Zeb, C. Vargas-Rosales et al.. (2019). , “In-vehicle cognitive route decision using fuzzy modeling and artificial neural network,” IEEE Access, vol. 7, pp. 20262–20272.
17. A. Ata, M. A. Khan, S. Abbas, G. Ahmad and A. Fatima. (2019). “Modelling smart road traffic congestion control system using machine learning techniques,” Neural Network World, vol. 29, no. 2, pp. 99–110.
18. M. Dohler, I. Vilajosana, X. Vilajosana and J. Llosa. (2011). “Smart cities: An action plan,” in Proc. of Barcelona Smart Cities Congress, Barcelona, Spain, pp. 1–6.
19. T. Bakıcı, E. Almirall and J. Wareham. (2013). “A smart city initiative: The case of barcelona,” Journal of the Knowledge Economy, vol. 4, no. 2, pp. 135–148.
20. R. Giffinger and H. Gudrun. (2010). “Smart cities ranking: An effective instrument for the positioning of the cities,” Architecture, City and Environment, vol. 4, no. 12, pp. 7–26.
21. A. Zanella, N. Bui, A. Castellani, L. Vangelista and M. Zorzi. (2014). “Internet of things for smart cities,” IEEE Internet of Things Journal, vol. 1, no. 1, pp. 22–32.
22. A. Fatima, M. A. Khan, S. Abbas, M. Waqas, L. Anum et al.. (2019). , “Evaluation of planet factors of smart city through multi-layer fuzzy logic (MFL),” ISC International Journal of Information Security, vol. 11, no. 3, pp. 51–58.
23. R. P. Dameri. (2012). “Defining an evaluation framework for digital cities implementation,” in Int. Conf. on Information Society (i-Society 2012London, pp. 466–470.
24. A. Atta, S. Abbas, M. A. Khan, G. Ahmed and U. Farooq. (2018). “An adaptive approach: Smart traffic congestion control system,” Journal of King Saud University—Computer and Information Sciences, pp. 1–8.
25. H. Chourabi, T. Nam, S. Walker, J. R. Gil-Garcia, S. Mellouli et al.. (2012). , “Understanding smart cities: An integrative framework,” in Proc. of 45th Hawaii Int. Conf. on System Science, Maui, HI, pp. 2289–2297.
26. M. A. Khan, M. Umair and M. A. S. Choudhry. (2015). “GA based adaptive receiver for MC-CDMA system,” Turkish Journal of Electrical Engineering & Computer Sciences, vol. 23, no. 1, pp. 2267–2277.
27. R. Thomas, D. Friend, L. DaSilva and A. Mackenzie. (2006). “Cognitive networks: Adaptation and learning to achieve end-to-end performance objectives,” IEEE Communications Magazine, vol. 44, no. 12, pp. 51–57.
28. G. Marfia, M. Roccetti, A. Amoroso, M. Gerla, G. Pau et al.. (2011). , “Cognitive cars: Constructing a cognitive playground for VANET research testbeds,” in Proc. of the 4th Int. Conf. on Cognitive Radio and Advanced Spectrum Management, Barcelona, Spain, pp. 1–5.
29. S. Chen, S. Zhang, J. Shang, B. Chen and N. Zheng. (2017). “Brain-inspired cognitive model with attention for self-driving cars,” IEEE Transactions on Cognitive and Developmental Systems, vol. 11, no. 1, pp. 13–25.
30. L. L. de Carvalho, D. J. Pereira and S. A. Coelho. (2016). “Origins and evolution of enactive cognitive science: Toward an enactive cognitive architecture,” Biologically Inspired Cognitive Architectures, vol. 16, pp. 169–178.
31. V. Dominguez and M. Gentzler. (2011). “How perceptual and cognitive factors are involved in a car accident: A case study,” UCF Undergraduate Research Journal, vol. 5, no. 1, pp. 41–50.
32. J. Lee, L. Xiao, S. Schoenholz, Y. Bahri, R. Novak et al.. (2019). , “Wide neural networks of any depth evolve as linear models under gradient descent,” in Advances in Neural Information Processing Systems, Vancouver, Canada, pp. 8572–8583.
33. M. Mohammadi and A. Al-Fuqaha. (2018). “Enabling cognitive smart cities using big data and machine learning: Approaches and challenges,” IEEE Communications Magazine, vol. 56, no. 2, pp. 94–101.
34. L. Foschini, T. Taleb, A. Corradi and D. Bottazzi. (2011). “ M2M-based metropolitan platform for IMS-enabled road traffic management in IoT,” IEEE Communications Magazine, vol. 49, no. 11, pp. 50–57.
35. P. Vlacheas, R. Giaffreda, V. Stavroulaki, D. Kelaidonis, V. Foteinos et al.. (2013). , “Enabling smart cities through a cognitive management framework for the internet of things,” IEEE Communications Magazine, vol. 51, no. 6, pp. 102–111.
36. G. Huang, G. B. Huang, S. Song and K. You. (2015). “Trends in extreme learning machines: A review,” Neural Networks, vol. 61, pp. 32–48.
37. W. Kong, Z. Y. Dong, Y. Jia, D. J. Hill, Y. Xu et al.. (2017). , “Short-term residential load forecasting based on LSTM recurrent neural network,” IEEE Transactions on Smart Grid, vol. 10, no. 1, pp. 841–851.
38. Q. Wu, G. Ding, Y. Xu, S. Feng, Z. Du et al.. (2014). , “Cognitive internet of things: A new paradigm beyond connection,” IEEE Internet of Things, vol. 1, no. 2, pp. 129–143.
39. A. Azmoodeh, A. Dehghantanha and K. K. R. Choo. (2018). “Robust malware detection for internet of (battlefield) things devices using deep eigenspace learning,” IEEE Transactions on Sustainable Computing, vol. 4, no. 1, pp. 88–95.
40. S. Feng, P. Setoodeh and S. Haykin. (2017). “Smart home: Cognitive interactive people-centric Internet of Things,” IEEE Communications Magazine, vol. 55, no. 2, pp. 34–39.
41. S. Abbas, M. A. Khan, L. E. Falcon-Morales, A. Rehman, Y.Saeed et al.. (2020). , “Modeling, simulation and optimization of power plant energy sustainability for IoT enabled smart cities empowered with deep extreme learning machine,” IEEE Access, vol. 8, no. 1, pp. 39982–39997.
42. Q. Wu, G. Ding, Y. Xu, S. Feng, Z.Du et al.. (2014). , “Cognitive internet of things: A new paradigm beyond connection,” IEEE Internet of Things, vol. 1, no. 2, pp. 129–143.
43. A. Rehman, A. Athar, M. A. Khan, S. Abbas, A. Fatima et al.. (2020). , “Modelling, simulation, and optimization of diabetes type II prediction using deep extreme learning machine,” Journal of Ambient Intelligence and Smart Environments, vol. 12, no. 2, pp. 125–138.
44. M. Adnan Khan, S. Abbas, K. Masood Khan, M. A. Al Ghamdi and A. Rehman. (2020). “Intelligent forecasting model of COVID-19 novel coronavirus outbreak empowered with deep extreme learning machine,” Computers, Materials & Continua, vol. 64, no. 3, pp. 1329–1342.
45. J. Cheng, Z. Duan and Y. Xiong. (2015). “QAPSO-BP algorithm and its application in vibration fault diagnosis for a hydroelectric generating unit,” Journal of Vibration and Shock, vol. 34, no. 23, pp. 177–181.
46. G. B. Huang, D. H. Wang and Y. Lan. (2011). “Extreme learning machines: A survey,” International Journal of Machine Learning and Cybernetics, vol. 2, no. 2, pp. 107–122.
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |