DOI:10.32604/cmc.2021.014102
| Computers, Materials & Continua DOI:10.32604/cmc.2021.014102 | |
| Article |
A Bio-Inspired Routing Optimization in UAV-enabled Internet of Everything
1Department of Computer Science, Abdul Wali Khan University Mardan, Mardan, 23200, Pakistan
2Department of Computer Science & Information Technology, Sarhad University of Science and Information Technology, Peshawar, 25000, Pakistan
3Department of Computer Science,Islamia College Peshawar, Peshawar, 25000, Pakistan
4Institute of Computing, Kohat University of Science and Technology, Kohat, 26000, Pakistan
5Department of Information Technology, College of Computers and Information Technology, Taif University, Taif, 21944, Saudi Arabia
*Corresponding Author: Fasee Ullah. Email: faseekhan@gmail.com
Received: 31 August 2020; Accepted: 28 October 2020
Abstract: Internet of Everything (IoE) indicates a fantastic vision of the future, where everything is connected to the internet, providing intelligent services and facilitating decision making. IoE is the collection of static and moving objects able to coordinate and communicate with each other. The moving objects may consist of ground segments and flying segments. The speed of flying segment e.g., Unmanned Ariel Vehicles (UAVs) may high as compared to ground segment objects. The topology changes occur very frequently due to high speed nature of objects in UAV-enabled IoE (Ue-IoE). The routing maintenance overhead may increase when scaling the Ue-IoE (number of objects increases). A single change in topology can force all the objects of the Ue-IoE to update their routing tables. Similarly, the frequent updating in routing table entries will result more energy dissipation and the lifetime of the Ue-IoE may decrease. The objects consume more energy on routing computations. To prevent the frequent updation of routing tables associated with each object, the computation of routes from source to destination may be limited to optimum number of objects in the Ue-IoE. In this article, we propose a routing scheme in which the responsibility of route computation (from neighbor objects to destination) is assigned to some IoE-objects in the Ue-IoE. The route computation objects (RCO) are selected on the basis of certain parameters like remaining energy and mobility. The RCO send the routing information of destination objects to their neighbors once they want to communicate with other objects. The proposed protocol is simulated and the results show that it outperform state-of-the-art protocols in terms of average energy consumption, messages overhead, throughput, delay etc.
Keywords: UAV; flying sensor network; IoT; IoE; optimization; routing
Recent advances in information and communication technology (ICT) have further expanded into the Internet of Things (IoT) from simply ‘things’ to features “the link of smart things”. In the meantime, the notion of the Internet of Things (IoE) is being expanded as an extension of the IoT. Though, the use of IoE is beginning to become a major challenge, including Ue-IoE coverage and the limited capacity of integrated technologies.
The use of IoE depends on the integration of new technologies such as sensor and imaging/embedded technology, low-power communication and large-scale data analysis [1]. Over the years, more and more ideas have been brought forward with the new bricks for developing IoE. First, improvements in sensor and embedded technology have made Internet of Things (IoT) objects more portable, efficient and use less power [2,3]. Second, the invention of Wireless Power Supply (LPWAN) devices enables the integration of low-voltage IoT objects [1]. In addition, intelligent solutions and the large amount of large IoT data have motivated the intelligence of IoE. Thus, IoE can be used in a wide range of applications such as intelligent manufacturing, smart farming and intelligent logistics.
Unmanned aerial vehicles (UAVs) have recently gained traction due to their excellent transportation, low cost and easy delivery. UAVs can therefore overcome the challenges of IoE. Ue-IoE consist of vehicle moving in the air in any direction and are able to share information with each other even in the absence of ground segment. Unmanned aerial vehicles (UAVs) have gained traction in recent years by both industry and education because of their flexibility and mutable services. With high performance and elastic placement, UAVs can encompass the coverage of IoE [4,5]. Compared to ground and satellite transmission lines, wireless connectivity can be used super-fast and adaptable to improve Ue-IoE coverage and capability [5]. The simple conversion of UAVs also empower many IoE applications. Due to their dedication to setting up and designing control systems, UAVs have a wide range of applications including agricultural management [6], mammalian inspection [7], and medical applications for military [8]. Conversely, the use of UAVs in IoE also presents new challenges in the perception of dynamic Ue-IoE connectivity, top-of-the-line Ue-IoE optimization, controllability, and brilliant intelligent algorithms. To meet these challenges, we need to develop legitimate communication models, flexible exchange of resources, optimization of UAVs trajectory, and intelligent strategies in IoE.
Research on multi-UAV (mUAV) Ue-IoEs focuses on improving the performance of A2A connections on multiple UAVs. The use of A2A in special features wireless connection and interference with data. Because of the movement of several UAVs simultaneously, the channel quality of A2A connections is not stable, making the topology of the Ue-IoE very dynamic. The routing information of each UAV is updated once a topology change occur. The frequent changes in topology bring extra challenges like congestion, delay, energy consumption, control messages overhead etc.
In this article, a routing optimization protocol based on honey bee algorithm named “A bio-inspired flying sensor network routing optimization in UAV-enabled internet of everything (BIUe-IoE)” is proposed to overcome the issues discussed above. The algorithm select a set of optimum objects to perform the routing computation on behalf of their neighbors. The routing path from source to destination is given to the object once an object want to transmit its data. In this way, the frequent changes in Ue-IoE topology do not influence the routing tables of all objects in Ue-IoE. The routing tables of designated objects are updated. The topology maintenance overhead can be reduced and the IoE objects transmit data with smaller delay. The simulation results show that the proposed scheme outperform state-of-the-art routing protocols.
The rest of the article is structured as: Section II examines UAV-related activities: UAV communication and routing schemes. In Section III, we propose the solution for UAV-enabled IoE (Ue-IoE) for routing to increase the Ue-IoE lifetime. Section IV discuss to experimental evaluation, in which we show that BIUe-IoE can greatly enhance Ue-IoE lifetime, packet delivery ratio and decrease end-to-end delay. Finally, Section V concludes the article.
The research involves two approaches: Multiple UAVs flight optimization and dynamic routing schemes. Both studies have shown significant attention to a wide range of UAV networks, as seen in several studies [4,9,10]. Compared to unmanned aerial system (UAS) that have control over the UAV target, the UAV communication system has only a stable communication among the UAVs or among the UAVs and the ground segment. Recent research on UAVs provided two classes of UAV communication systems: MUAV ad hoc networks (MUANET) and UAV enabled communication networks (UeCNET).
MUAV ad hoc Networks: MUANET functionality is self-configuring with high performance and is largely independent of current mobile networks. The MUANET can facilitate cell phone connection and coverage in some situations such as emergency communication, aircraft surveillance, and aerial sensor network. The authors in [11], for example, describe a similar situation, in which multi-UAV support vehicles-to-vehicle communications in areas with poor network connection to ground segment. In addition, multi-UAV networks can process data and become key players in large sensor networks [4,12,13].
Research on MUANETs focus on improving the performance of A2A connections among multiple UAVs. The performance of A2A generally consist of data communication and wireless connectivity. Due to the movement of multiple UAVs, the channel quality of A2A connections is not stable, making the topology of the network more dynamic. The research involves two approaches: MUAV trajectory fine-tuning and routing. Both studies have been well-reviewed for MUANETs, as found in several papers [4,9,10]. For example, [9] provides an overview of the routing schemes for MUAV communications, including self-regulation, interference tolerance, SDN control, delivery, and energy saving. At this time, [10] compared the performance of the current routing schemes are divided into two categories: a single-hope and a multi-hop. The comparison criteria include, energy efficiency, load balancing, loop-free capability, route update process and so on.
Moreover, earlier studies have examined the trajectory optimization of MUAVs when a specific routing algorithm, i.e., single-hop or multi-hop, is chosen. For example, the authors in [14,15] examined the trajectory optimization with energy management. References [14,15] considered single-hop routing protocol, in which each ground object had access to only one UAV and several UAVs working together for a group of ground objects. In addition, the authors in [16–18] examined the trajectory optimization of multi-hop routing algorithms, where many UAVs providing connectivity to a group of ground objects, with the goal of ’being an end-to-end throughput maximization. UeCNET is the extension network of current networks. Unlike the self-organized independent architecture of MUANETs, UeCNETs are an infrastructure based topology networks, dependent on the access points of the existing network.
In a UeCNET, UAVs can be used as border objects with network functions such as flying base stations (e.g., [19,20]), relay objects [21,22] or terminal objects such as the aerial surveillance camera [23,24]. The purpose of UeCNETs is to deliver elastic communication services in regions that lose link to existing networks. In this, UAVs play a title role as relay or terminal objects which are connected to the disconnected nodes and thus establish the communication links.
For UeCNETs, majority of the readings are primarily allied to the optimization of UAV trajectory. In preceding research, the trajectory has been optimized by optimizing several performance metrics, including QoS communication, adequate coverage, time and energy efficiency, probability of failure, etc. For example, an iterative procedure that minimize disconnected nodes to cover multiple isolated sensor nodes is presented in [25]. Similarly, [19] proposed an optimal positioning scheme for UAV base stations by maximizing the number of users covered. Furthermore, [22] designed the path of a single relay UAV to maximize energy efficiency. In addition, [21] optimized the orbit of the UAVs by minimizing the likelihood of failure, where the UAVs acted as amplify-and-forward relay.
The research of UAVs usually focuses on two main issues: Firsty, to examine the UAS for the management of UAVs, and the other is to study the UeCNET to guarantee reliable interconnections (including A2A, A2G and G2A links). These two issues share a common research problem–-UAV design capabilities (i.e., trajectory optimization). According to a latest research on UAVs [26], UAVs take the opportunity to enable IoE. In the following articles, we will discuss the routing issue in IoE settings using UAV.
The deployment and routing of UAVs for different applications is not easy because they require not only large resources, but also high reliability. Due to the lack of UAVs onboard resources, dynamics in applications and the environment, it is difficult to get a system in place that addresses the need for uniform policy in the online environments. To address these issues, [27] propose an online solution for UAV swarms work together in an edge-cloud environment to optimize both computation offloading and multi-hop routing. First, they introduce the UAV edge cloud computation model to encounter the requirement of delay and computation capability. Formulation of a joint optimization of workflow assignment and multi-hop routing is carried out to reduce the computation cost and delay. To solve this non deterministic hard problem, a model based on the Markov estimation process was designed to find near optimum solutions.
The cost of data communication is wireless sensor networks (WSNs) is particularly high. To solve this problem, the collection of data can be carried out via UAVs is a favorable alternative [28]. Here, the UAV-enabled WSN is considered, where UAVs are sent to collect data from sensors deployed at different locations in WSN. The optimization problem is addressed to achieve the minimum power consumption goal of the WSN after data communication for energy efficient UAV routing conditional on data gathering and UAV traveling distance restrictions.
The route optimization can enhance the efficiency of the FANET using artificial neural networks. In highly dynamic FANET, the strength of the route determines the stability of the network. According to CHNN [29], the DSR has been upgraded and branded as the CHNN-DSR, which has received better and more stable routes that improve the stability of FANET and network communication. The authors focus on the optimization of multiple metrics during the design of routing algorithms.
Findings and solution: The routing schemes discussed above have one common agenda i.e., the data transmission of data on shortest routes to prolong the network life time and minimize delay. The flying nature of some IoE-objects in UAVs-enabled IoE, it is difficult to synchronize the routing paths due to frequent topology changes. All the schemes discussed above consume most of the energy on updating their routing tables after a single change in topology. One solution is the cluster based routing but the control messages overhead may increase with high dynamic topology and quality of service may compromise. A routing scheme is required that does not need updating routing tables of all Ue-IoE objects with topology changes. The next section elaborate a routing scheme which minimize the control overhead messages by assigning the route computation to some IoE-objects in Ue-IoE.
3 Proposed Bio-Inspired Bee Routing Optimization for Ue-IoE
In this proposal, the BRUe-IoE is assumed a graph G (V, E) initially. The vertices V in graph G represents the IoE-objects and the edges E denote the connections among these IoE-objects. The objective is to discover the shortest route from the source IoE-object to sink when an IoE-object needs to share information with the destination IoE-object (may be base station (BS) on the ground or air). The time required and consumption of energy may be high to compute shortest route from every IoE-object to BS. It is very tough job and sometimes not possible that each IoE-object should compute the shortest route because of restricted resources such as energy and computation. Calculation of shortest route from source to destination is given to some IoE-objects named OB/RCO in the Ue-IoE. Each time an IoE-object needs to share information with the sink, the shortest route information is acquired from these nominated OB/RCOs. In this way, the routing tables of all IoE-objects will not be updated on each topology change and the Ue-IoE resources will be saved. The task of OB/RCO is rotated among all IoE-objects in Ue-IoE in order to distribute the load.
3.1 Route Computation Objects Selection
The main objective of this research is to select the OB/RCOs at different time intervals. The selection of OB/RCOs is based on multiple factors including residual energy, degree and mobility. The IoE-objects having enough energy, high degree and relative mobility are the ideal candidates for OB/RCOs. A modified version of honey bee algorithm is used to compute the OB/RCOs in Ue-IoE. The role of a bee is determined by its type in bee intelligence algorithm.
In this research, the bees are allocated into two types. First, employed bees (ordinary IoE-objects or EBs) and onlooker bees (OBs). Here, the bees denote IoE-objects in the Ue-IoE. The job of OBs (RCOs in BRUe-IoE) is the discovery of the shortest routes from its neighbors (source) to the sink IoE-objects. The IoE-objects acquire the shortest path information from the OB/RCOs in its neighborhood and transmit information to the sink on that route. The IoE-objects having high nectar value are ideal candidates for the OB/RCOs. The quantity of nectar is computed on the basis of IoE-object energy, IoE-object degree and the relative mobility such as:

In the Eq. (1) above, IoE-object nectar is the quantity of nectar in a IoE-object, EIoE-object denote the residual energy of an IoE-object, D IoE-object represent the neighbors of IoE-objects, S IoE-object denote the speed of a IoE-object and Di IoE-object indicate direction of IoE-object. The OB/RCOs must be nominated from every part of the Ue-IoE.
The Euclidian distance of IoE-objects must be considered during the selection of OB/RCOs. The group of OB/RCOs designated in this way have roughly equal distance from each other. Principally, the problem is presented using Eq. (2):

Subject to  for
for  and
and 

In the above Eq. (2), IoE-object is the total number of IoE-objects in Ue-IoE, k is the total no of OB/RCOs,
is the total number of IoE-objects in Ue-IoE, k is the total no of OB/RCOs,  , (
, ( ) denote the live position of IoE-object i in Ue-IoE,
) denote the live position of IoE-object i in Ue-IoE,  , (
, ( ) signify the mean value for checking the fitness of a IoE-object to perform OB/RCO role. The Eq. (3) below can be used to compute the mean value Aj:
) signify the mean value for checking the fitness of a IoE-object to perform OB/RCO role. The Eq. (3) below can be used to compute the mean value Aj:

In Eq. (3), the number of neighbors of the jth OB/RCO is denoted by Nj, IoE-objectnectar is the weight factor with respect to its relation of IoE-object i with OB/RCO j, if the IoE-object i is a neighbor of a IoE-object j, the value of IoE-objectnectar will be assigned 1 or 0 if not in the neighborhood.
When a group of OB/RCOs are selected, the OB/RCOs are now accountable to compute the shortest routes for all its neighbors (employed bees). The routes are updated after certain interim. The OB/RCO broadcast these computed routes to their neighbors as a result of the frequent topology updating in the Ue-IoE. The functioning of the OB/RCOs selection is presented using an algorithm and will guide the readers in easy way. Tab. 1 presents the notations used in Algorithms 1 and 2.
Table 1: Notations used in Algorithm 1 and Algorithm 2
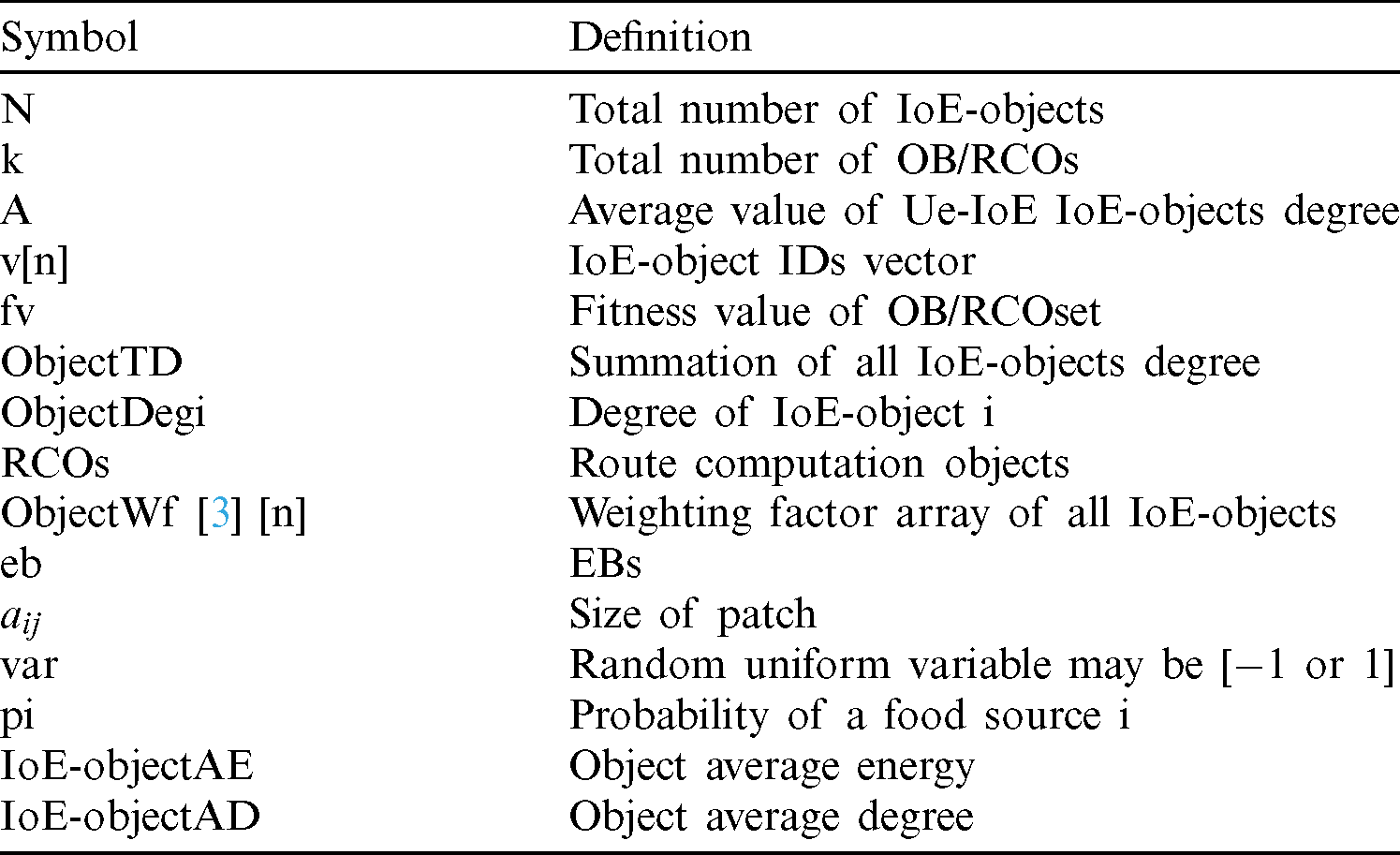
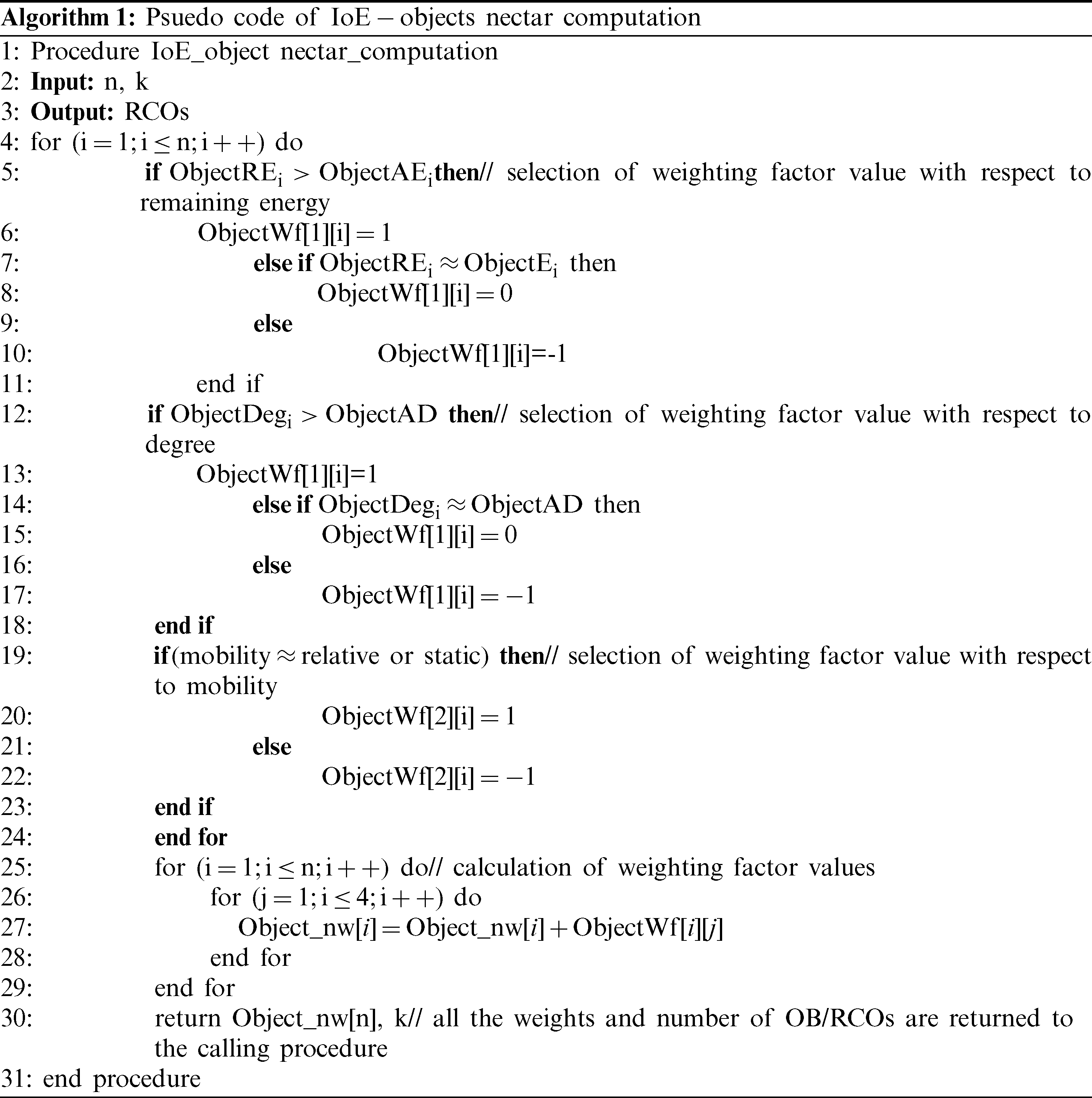
In Algorithm 1, the values of selection parameters are accumulated. The summation of all IoE-objects remaining energy and degree is computed in the procedure on lines 5–8. The average of energy and degree is calculated in the succeeding lines. The IoE-object weight factor value with respect to remaining energy is assigned to the vector in lines 12–19. Similarly, the weight factor on the basis of IoE-object degree is assigned to the vector in lines 20–26. The relative mobility composed of IoE-object speed and direction is considered an important parameter in the selection of OB/RCOs. The weight factor w.r.t relative mobility is assigned to the vector in lines 27–32 of Algorithm 3.1. All the weight values are summed in the next lines and the resultant vector contains all IoE-objects weight values is returned to the calling procedure. To calculate the fitness value of an IoE-object for the role of OB/RCO, the pseudo code of Algorithm 3.2 below is presented.
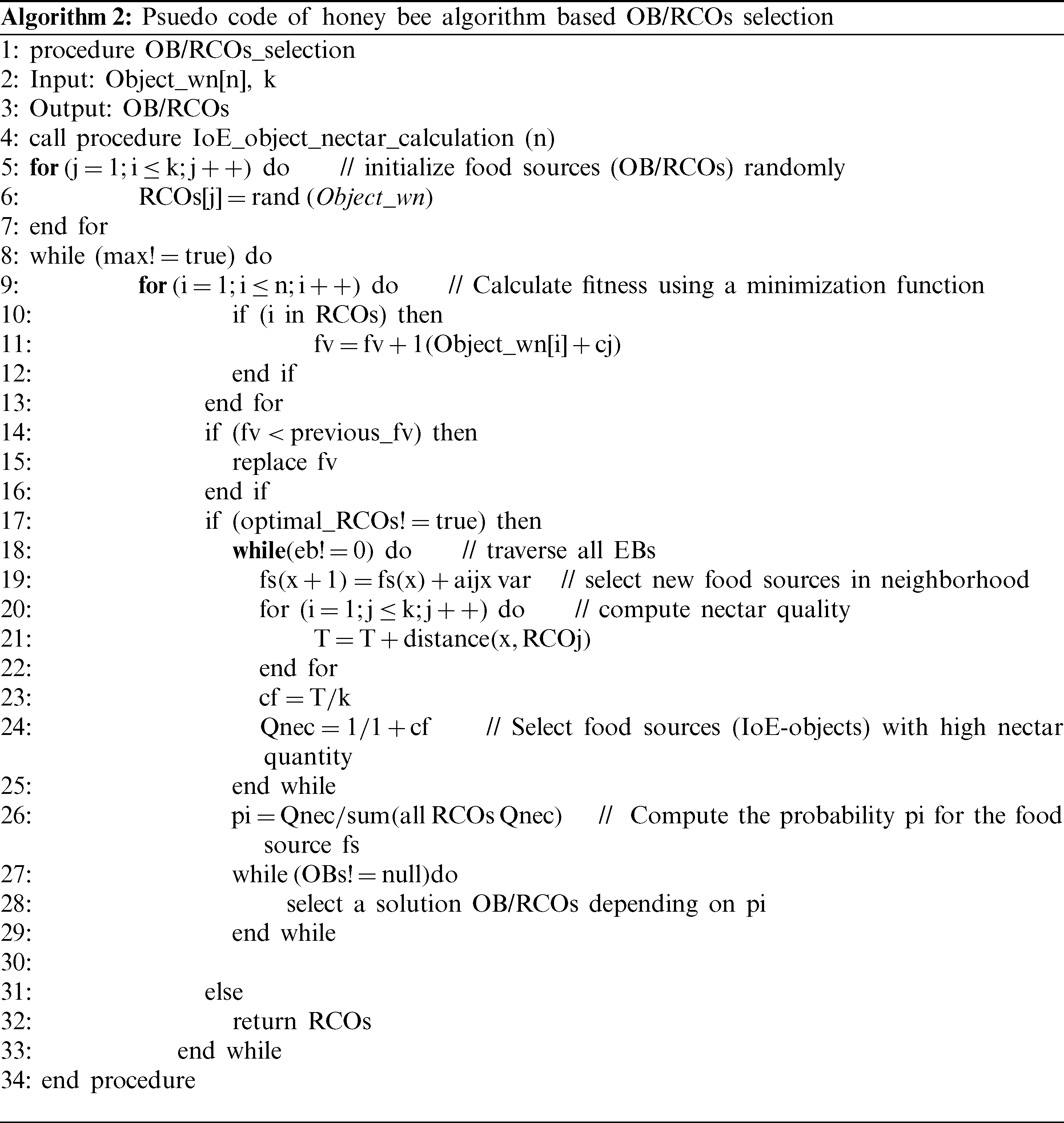
The preceding Algorithm 2 works in a way that a set of IoE-objects are designated as OB/RCOs (k) from all the IoE-objects (n) in Ue-IoE. The IoE-objects are designated for the role RCOs or OB based on its weights computed by Eq. (1) in the early stage. The fitness of designated OBs is assessed by Eq. (2). The IoE-objects are given the role of OBs for specific interim if the investigation via Eq. (2) qualified. Alternatively, another group of OBs nominated arbitrarily is assessed and this procedure will continue till an optimum group of OBs is sought out.
With the aim of equally distributing the load on the Ue-IoE, the OBs/RCOs are released after some time and an alternative set of IoE-objects is designated from EBs to accomplish the role of OBs.
3.2 Formation of Routes and Data Communication
Route computation is carried out by designating the next optimum IoE-object from other segments. RCOs in the suggested method act as leader IoE-objects; therefore, the key duty of the ordinary nodes is to request route information from the bordering aerial IoE-object that keeps a higher weight value. Formerly, these aerial IoE-objects choose paths to the BS. The routing is based on the broadcasting range and flight of the aerial IoE-objects. The entire Ue-IoE prototype make broadcasts about the weight factor of IoE-objects. The HELLO messages are broadcasted for the purpose. Then, in the subsequent phase, IoE-objects are sorted in order of their weight factor, provided that the conditions in line 6 and line 6.g are meet by the IoE-object to be designated next. Moreover, it is taken into consideration that the next hop is not selected as of the similar segment during the deployment of the procedure. On the other hand, there may be cases when no IoE-object is available in the succeeding segment with a greater weight value. Therefore, the IoE-objects from the similar segment are designated till the disposal of an IoE-object as of the subsequent segment on condition that the IoE-object of the similar segment has not utilized formerly in lieu of routing throughout the loop in progress. UAVs are selected using the weight factor analogous to IoE-objects to IoE-objects routing. The procedure runs in diverse environments subject to the numeral of UAVs placed in every segment. While suggested methodology, one UAV is placed in each segment, however, the procedure is flexible and may be utilized with different amount of UAVs in a specific segment.
When an IoE-object is selected on basis of weight, the value of weight may change after each rotation, hence eliminating the chance of selecting the same IoE-object which may arise the looping issue in Ue-IoE. A routing spanning tree contains the IoE-objects having high weight factors is designed which mostly chooses the IoE-objects from the diverse segments, therefore transferring data to the sink IoE-object. Moreover, if the IoE-objects lies in same segment, choosing the non-repetitive IoE-objects regardless of being the second highest in weight factor offers a non-redundant IoE-object selection for proficient data transfer. On the other hand, this choice is subject to the limitations defined in 6 and 6.g. Similarly, the suggested method selects optimal IoE-objects by objective function on the basis of weight factor, offers stable data transfer, provide high accuracy and balance the load.
3.4 Route Restoration and Repair
There is a common occurrence that IoE-objects do not have the same power consumption simultaneously because of long connections. The energy consumption should be consistent so to balance the load in optimum way among the IoE-objects and area of interest. In addition, the route will face inaccuracies because the non-overwriting original messages. Such false alarms in the Ue-IoE, reconfiguration and constant maintenance are used to provide a continuous and stable model for the transmission of data.
The proposed bio-inspired routing for Ue-IoE uses weight factor as an optimization function to select RCOs (onlooker bees). The model was examined in the area with BS, UAVs, IoE-objects and IoE-objects placed using the Poisson distribution area of  50 m2. The initial power of IoE-objects is considered 150 J, and for UAVs it is considered that the power is greater than the demand of all Ue-IoE. For the convenience of the simulations, however, the initial power of UAVs is 2000 J. Segments varies between 3 m and 5 for each BS. The IoE-objects in Ue-IoE varies among 100 and 350. Using the standard method, the power consumption for an IoE-object is 0.5 J. The IoE-objects radio frequency is between 5 and 10 m and the output voltage of UAV is 500 m. The classification of the different measures applied to the assessment of requirements are outlined below as:
50 m2. The initial power of IoE-objects is considered 150 J, and for UAVs it is considered that the power is greater than the demand of all Ue-IoE. For the convenience of the simulations, however, the initial power of UAVs is 2000 J. Segments varies between 3 m and 5 for each BS. The IoE-objects in Ue-IoE varies among 100 and 350. Using the standard method, the power consumption for an IoE-object is 0.5 J. The IoE-objects radio frequency is between 5 and 10 m and the output voltage of UAV is 500 m. The classification of the different measures applied to the assessment of requirements are outlined below as:
Throughput: IoE-objects play a significant role in communication among the BS and IoE-objects. These metrics are responsible for the actual load of Ue-IoE across the connection lines. In addition, throughput is correspondingly responsible for the traffic rate of the whole Ue-IoE. The Ue-IoE with high throughput will have better performance.
Medium hop: The greater the intermediate IoE-objects will result the greater energy consumption. This measure provides an investigation of all IoE-objects used in the mean simulation step of the Ue-IoE structure.
Delivery ratio: Effective broadcast ensure improved communicating. The high delivery ratio of packets from one IoE-object to another IoE-object is the real indication of effective data transmission.
Delay: There may be a delay with a large number of intermediate IoE-objects and re-routing may increase. Delay is measured as the response time regarding communication load offered.
Ue-IoE Lifetime: As Ue-IoE performing its operations, the energy will be consumed and finally the total energy of Ue-IoE is used. A Ue-IoE with better lifetime have long lifetime. Therefore, examining the degree up to which the Ue-IoE works is known as the lifetime of the Ue-IoE.
Ue-IoE coverage: This parameter can be used for the total region covered using the live IoE-objects w.r.t the total region over which the IoE-objects are positioned.
Unnecessary repetitions per segment: In a Ue-IoE working over IoE-objects having limited energy and high mobility, the re-routing may be high, and hence need more calls to the shortest path calculation procedure. Frequent calls to shortest route computation algorithm may increase the energy consumption. The routing loop issue may arise due to large number of repetitions.
BRUe-IoE performance is assessed for the above defined metrics and the results are compared with Traffic routing for UAV swarms (TR-UAVswarms) [27], UAV enabled WSN (UAVe-WSN) [28] and optimized routing protocol for FANET (ORP-FANET) [29]. Two autonomous metrics assumed for investigation are energy consumption of IoE-objects at different time intervals and active IoE-objects. All the four models including our proposed BRUe-IoE are evaluated for the same metrics and configuration. The simulation results show that the control overhead is minimized and the delivery ratio is increased. Simulation results also prove that BRUe-IoE is proficient of discovering optimum routes.
The proposed BRUe-IoE gives 13.7%, 9.7% and 5.75% improved throughput compared to TR-UAVswarms, UAVe-WSN and ORP-FANET respectively, as shown in Fig. 1.
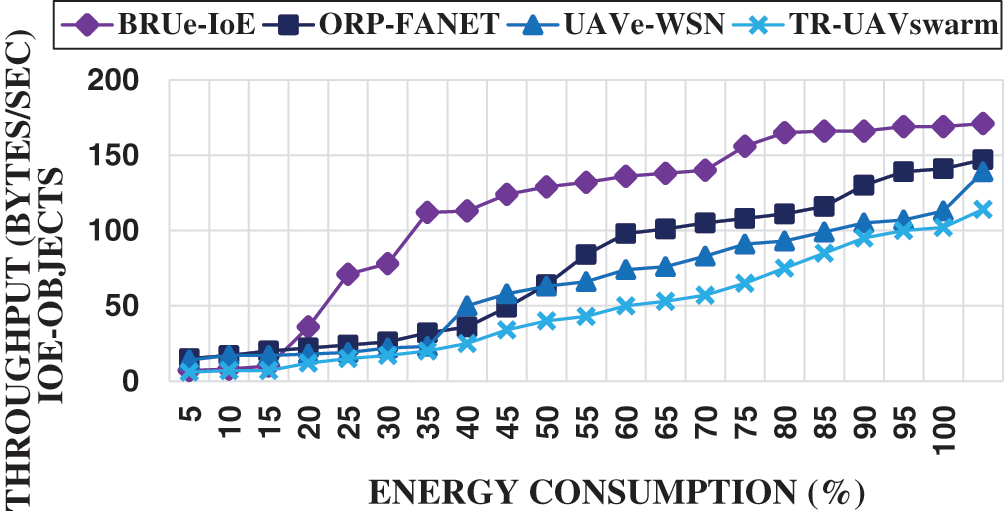
Figure 1: Energy consumption vs. throughput
An effective approach accountable for precise transfer of information. This concept is outlined above and known as packet delivery ratio. With minimum repetitions and improved connectivity among the IoE-objects and the UAVs, the BRUe-IoE gives 17.1%, 18.03%, and 31.6% better delivery than the TR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively, as presented in Fig. 2. The additional repetitions will require extra intermediary IoE-objects; hence, will increase the energy consumption. Conversely, the use of energy, average hop requisite in communication of data amongst the IoE-objects and the BS through UAVs will increase. Outcomes demonstrate that the BRUe-IoE needs 52%, 60.5%, and 68.7% fewer intermediary hops than TR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively, as displayed in Fig. 3.
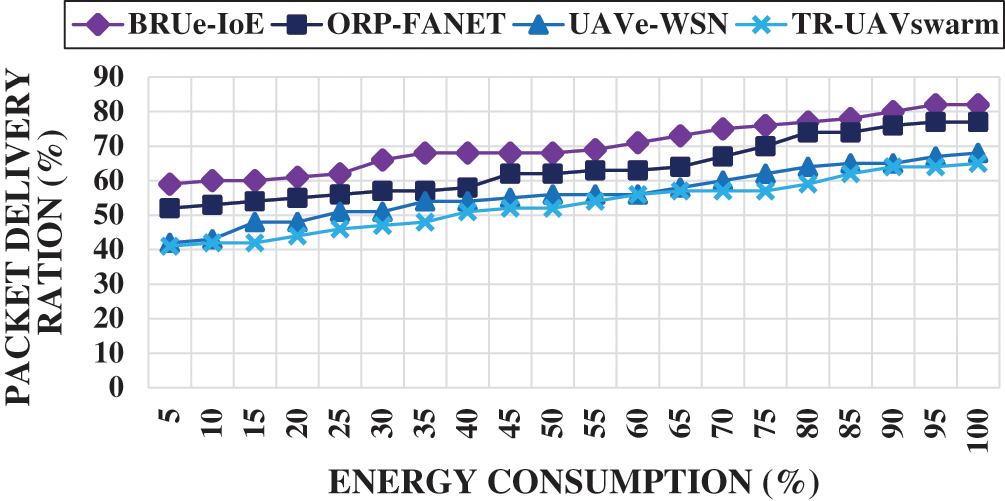
Figure 2: Energy consumption vs. packet delivery ratio of Ue-IoE
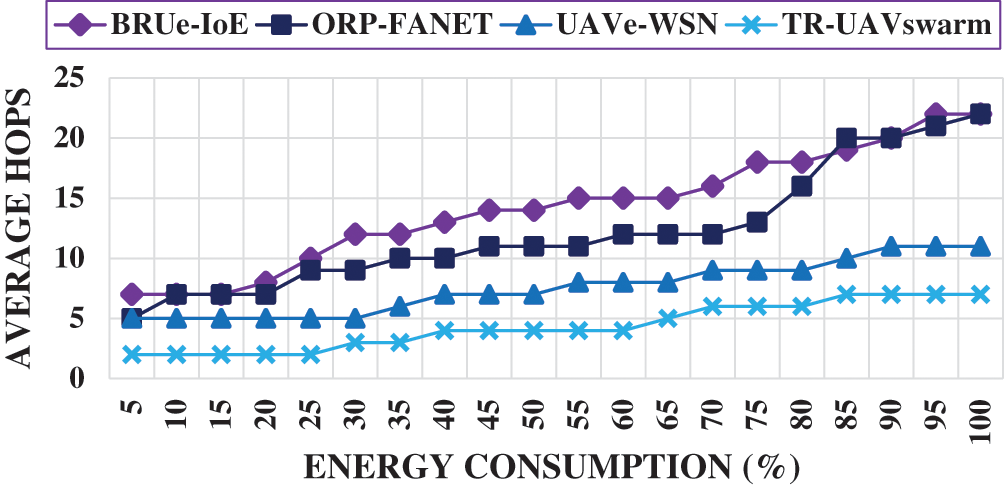
Figure 3: Ue-IoE energy consumption based on average hops count
With further energy ingestion, likelihood of IoE-objects going into dead state will increase resulting into smaller number of live IoE-objects, therefore, reducing the area covered by IoE-objects. The simulation results presented in Fig. 4 demonstrate that BRUe-IoE provides 18.9%, 21.3%, and 31.45% improved coverage as compared toTR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively. Ue-IoE operations are easily understandable when we know the end to end delay at specific time. Ue-IoE with higher delays may die very soon. Delays may not be totally avoided in Ue-IoE; though, delay under an some threshold will not disturb the Ue-IoE performance.
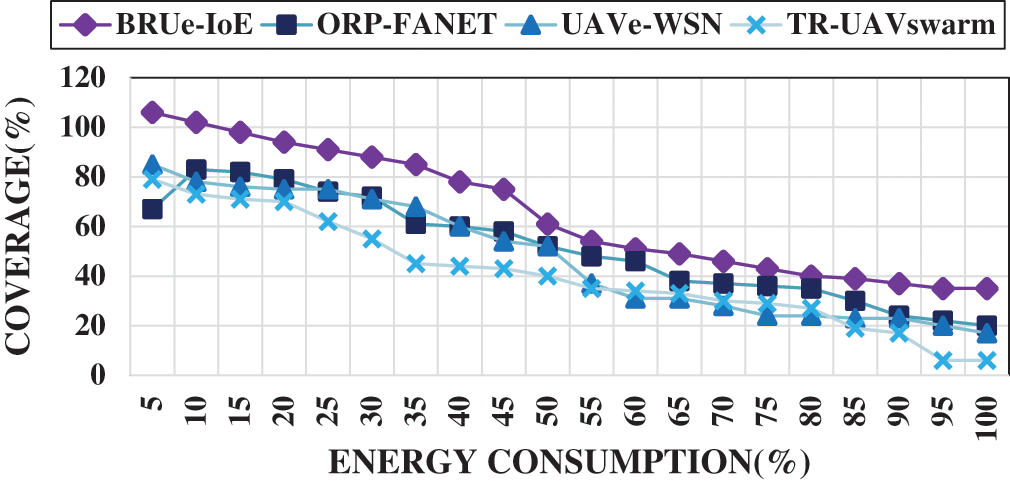
Figure 4: Comparison of Ue-IoE coverage and energy consumption
The simulation experiment demonstrate that the delay in BRUe-IoE is somehow low-slung and will not influence the performance of Ue-IoE. Graphs shown in Fig. 5 demonstrate that BRUe-IoE causes 11%, 27.6%, and 41.7% fewer delay as compared to TR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively. Increasing the numbers of intermediary IoE-objects will cause the routing loop problem; moreover, the extra repetitions will also increase. These extra computations result more energy and other resources consumption that finally affect the Ue-IoE operations. Graphs shown in Fig. 6 demonstrate that BRUe-IoE need 60.5%, 70.5%, and 82.99% fewer computations as compared to TR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively.
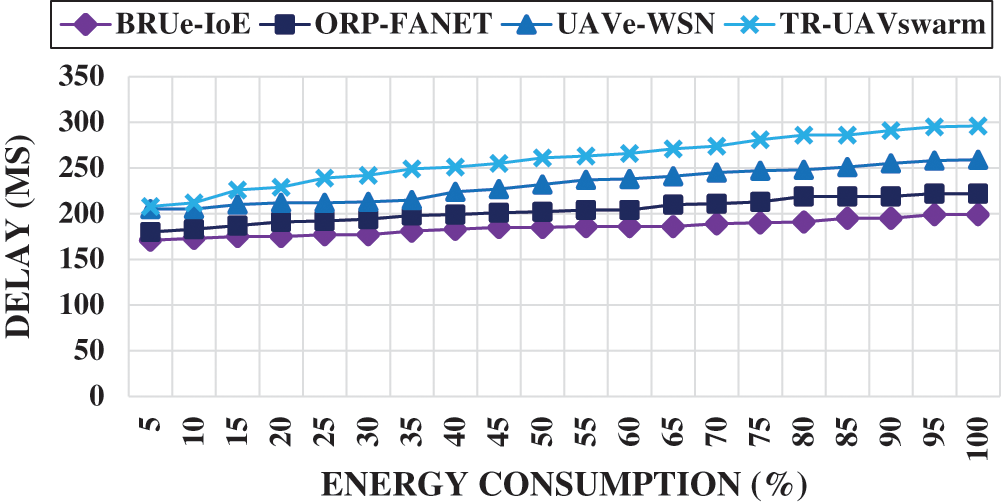
Figure 5: Delays vs. energy consumption
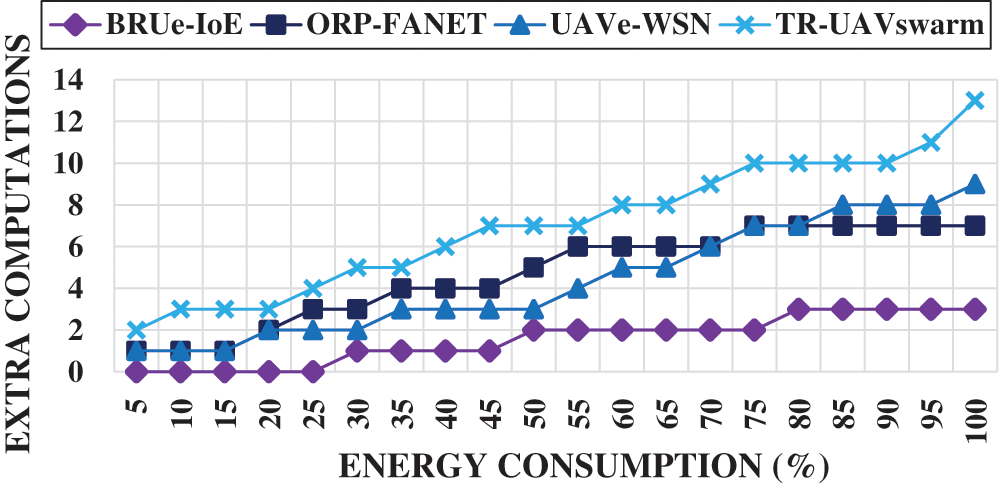
Figure 6: Extra iterations vs. energy consumption
A comprehensive study of the BRUe-IoE on energy model recommends that BRUe-IoE offer 19.17%, 31.45%, and 50.3% improved lifetime as compared to TR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively, as shown in Fig. 7 when we consider the Ue-IoE iterations. The BRUe-IoE will not arise any routing loop problem, so permitting the Ue-IoE to work deprived of some difficulty. This extension results better connectivity plus prolong lifetime. Live IoE-objects also influence the performance of the Ue-IoE to a huge level. The Ue-IoE having more active IoE-objects will perform fine. Experiments are conducted to check the packet delivery ratio and energy consumption w.r.t. the percentage of live IoE-objects. With growing amount of IoE-objects, the BRUe-IoE delivers 5.75%, 12.01%, and 25.76% more packets as compared to TR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively, as presented in Fig. 8 and consumes 21.75%, 24.15%, and 34.5% fewer energy compare to TR-UAVswarm, UAVe-WSN, and ORP-FANET, respectively, as presented in Fig. 9.
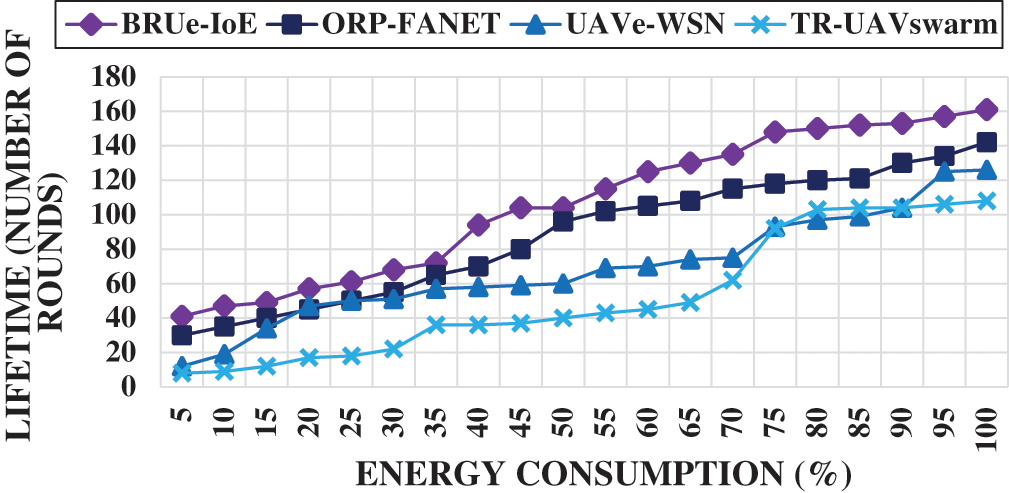
Figure 7: Lifetime vs. energy consumption
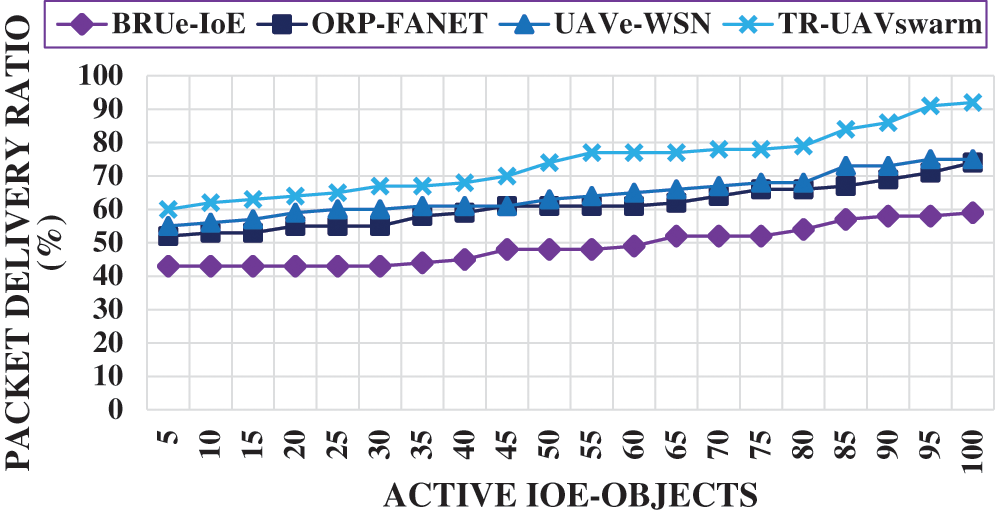
Figure 8: Delivery ratio vs. active IoE-objects
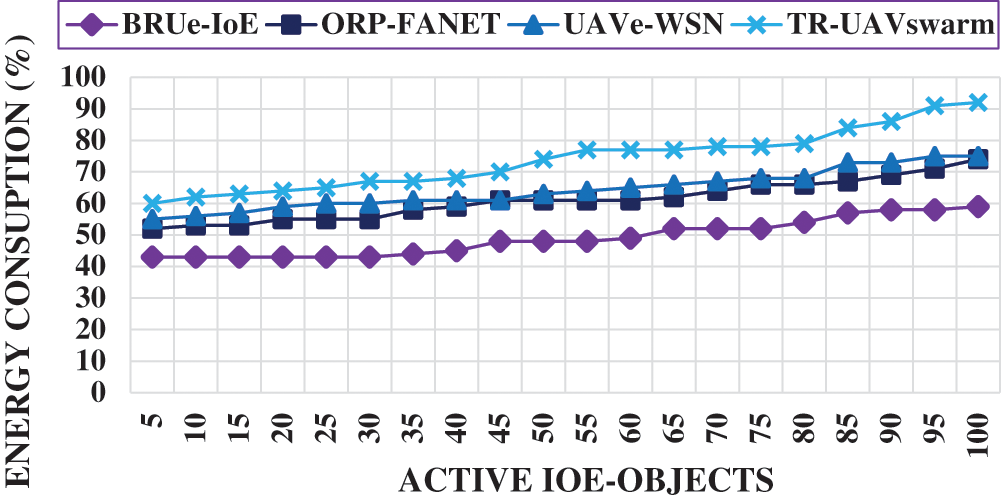
Figure 9: Energy consumption vs. active IoE-objects
Tabs. 2 and 3 show the comprehensive percentage progress using BRUe-IoE as compared to TR-UAVswarm, UAVe-WSN, and ORP-FANET on energy depletion as well as active IoE-objects, respectively.
Table 2: Mean percentage progress of BRUe-IoE as compared to TR-UAVswarm, UAVe-WSN, and ORP-FANET w.r.t energy consumption
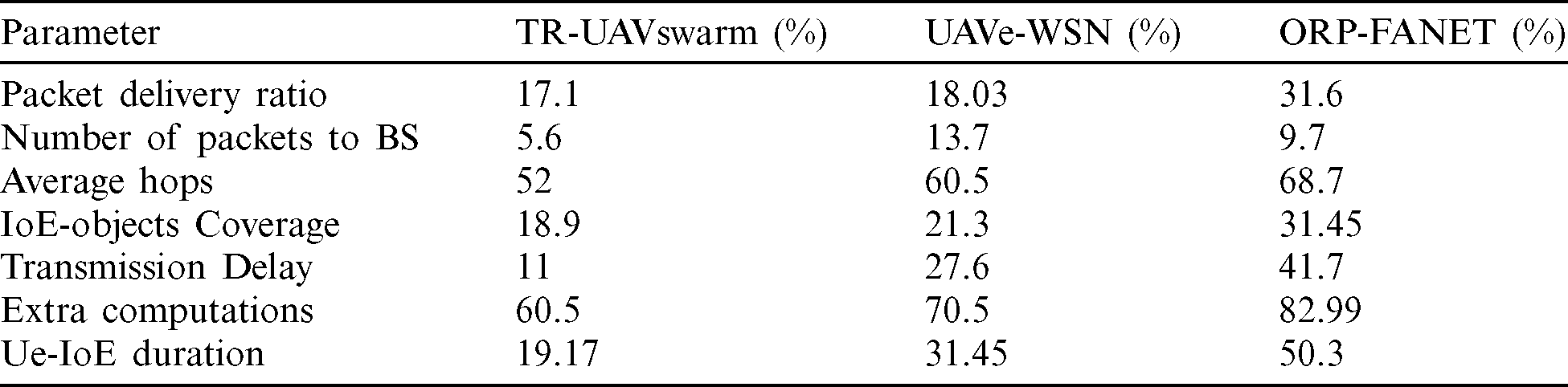
Table 3: Mean percentage progress of BRUe-IoE as compared to TR-UAVswarm, UAVe-WSN, and ORP-FANET w.r.t IoE-objects

In this article, the frequent updation of IoE-objects routing tables issue that arise due to the dynamic nature of Ue-IoE is addressed. In this proposal, the routing tables of selected IoE-objects are updated once a topology change occur and the whole Ue-IoE will not be affected. The IoE-objects known as routing computation objects are responsible to compute the routes from the source objects (neighbors) to destination once an IoE-object move from one location to another location. Once an IoE-object want to communication with another IoE-object, the routing information is obtained from the nearest RCO. The selection of RCOs is carried out on the basis of multiple metrics like residual energy, number of neighbors and relative mobility. The bee intelligence algorithm is used to get the optimal RCO from a set of all IoE-objects. The role of RCOs is rotated among all the IoE-objects of the Ue-IoE. The route maintenance and re-routing is minimized up to a large extent. The control messages overhead is decreased and the lifetime of the Ue-IoE is increased. The simulation results demonstrate that the proposed BRUe-IoE outperform state-of-the-art routing protocols for UAV-enabled internet of everything.
Acknowledgement: This research was supported by Taif University Researchers Supporting Project number (TURSP-2020/231), Taif University, Taif, Saudi Arabia.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. J. L. Holland and S. Lee. (2019). “Internet of Everything (IoEEye tracking data analysis,” In: Proc. Harnessing the Internet of Everything (IoE) for Accelerated Innovation Opportunities. 1 ed., vol. 1. Hershey, PA, 17033, USA: IGI global, pp. 215–245.
2. F. Javed, M. Afzal, M. Sharif and B. Kim. (2018). “Internet of Things (IoT) operating systems support, networking technologies, applications, and challenges: A comparative review,” IEEE Communications Surveys and Tutorials, vol. 20, no. 3, pp. 2062–2100.
3. C. M. De A. Lima, E. A. Da Silva and P. B. Velloso. (2018). “Performance evaluation of 802.11 IoT devices for data collection in the forest with drones,” in Proc. GLOBE-COM, Abu Dhabi, UAE, pp. 1–7.
4. M. Arafat and S. Mohammad. (2019). “A survey on cluster-based routing protocols for unmanned aerial vehicle networks,” IEEE Access, vol. 7, pp. 498–526.
5. Y. Zeng, R. Zhang and T. Lim. (2016). “Wireless communications with unmanned aerial vehicles: Opportunities and challenges,” IEEE Communications Magazine, vol. 54, no. 5, pp. 36–42.
6. X. Wu, X. Wu, L. Qiu and L. Zhou. (2019). “Agricultural unmanned aerial vehicle,” US Patent App, 16/120, 590.
7. A. S. Aniceto, M. Biuw, U. Lindstrøm, S. A. Solbø, F. Broms. (2018). et al., “Monitoring marine mammals using unmanned aerial vehicles: Quantifying detection certainty,” Ecosphere, vol. 9, no. 3, pp. 1–15.
8. C. Handford, F. Reeves and P. Parker. (2018). “Prospective use of unmanned aerial vehicles for military medical evacuation in future conflicts,” Journal of the Royal Army Medical Corps, vol. 164, no. 4, pp. 293–296.
9. L. Gupta, R. Jain and G. Vaszkun. (2016). “Survey of important issues in UAV communication networks,” IEEE Communications Surveys and Tutorials, vol. 18, no. 2, pp. 1123–1152.
10. J. Jiang and G. Han. (2018). “Routing protocols for unmanned aerial vehicles,” IEEE Communications Magazine, vol. 56, no. 1, pp. 58–63. [Google Scholar]
11. Y. Zhou, N. Cheng, N. Lu and X. Shen. (2015). “Multi-UAV-aided networks aerial-ground cooperative vehicular networking architecture,” IEEE Vehicular Technology Magazine, vol. 10, no. 4, pp. 36–44. [Google Scholar]
12. M. Erdelj, M. Krol and E. Natalizio. (2017). “Wireless sensor networks and multi-UAV systems for natural disaster management,” Computer Networks, vol. 124, no. c, pp. 72–86. [Google Scholar]
13. P. Sujit, D. Lucani and J. Sousa. (2012). “Bridging cooperative sensing and route planning of autonomous vehicles,” IEEE Journal on Selected Areas in Communications, vol. 30, no. 5, pp. 912–922. [Google Scholar]
14. Q. Wu, Y. Zeng and R. Zhang. (2018). “Joint trajectory and communication design for multi-UAV enabled wireless networks,” IEEE Transactions on Wireless Communications, vol. 17, no. 3, pp. 2109–2121. [Google Scholar]
15. X. Xu, L. Duan and M. Li. (2018). “UAV placement games for optimal wireless service provision,” in Proc. WiOpt, Shanghai, China, pp. 1–8. [Google Scholar]
16. B. M. Sathyaraj, L. C. Jain, A. Finn and S. Drake. (2008). “Multiple UAVs path planning algorithms: A comparative study,” Fuzzy Optimization and Decision Making, vol. 7, no. 3, pp. 257–267. [Google Scholar]
17. Z. M. Fadlullah, D. Takaishi, H. Nishiyama, N. Kato and R. Miura. (2016). “A dynamic trajectory control algorithm for improving the communication throughput and delay in UAV-aided networks,” IEEE Network, vol. 30, no. 1, pp. 100–105. [Google Scholar]
18. G. Zhang, H. Yan, Y. Zeng, M. Cui and Y. Liu. (2018). “Trajectory optimization and power allocation for multi-hop UAV relaying communications,” IEEE Access, vol. 6, pp. 48566–48576. [Google Scholar]
19. M. Alzenad, A. El-Keyi, F. Lagum and H. Yanikomeroglu. (2017). “3D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage,” IEEE Wireless Communications Letters, vol. 6, no. 4, pp. 434–437. [Google Scholar]
20. J. Lyu, Y. Zeng, R. Zhang and T. J. Lim. (2016). “Placement optimization of UAV-mounted mobile base stations,” IEEE Communications Letters, vol. 21, no. 3, pp. 604–607. [Google Scholar]
21. S. Zhang, H. Zhang, Q. He, K. Bian and L. Song. (2017). “Joint trajectory and power optimization for UAV relay networks,” IEEE Communications Letters, vol. 22, no. 1, pp. 161–164. [Google Scholar]
22. D. H. Choi, S. H. Kim and D. K. Sung. (2014). “Energy-efficient maneuvering and communication of a single UAV-based relay,” IEEE Transactions on Aerospace and Electronic Systems, vol. 50, no. 3, pp. 2320–2327. [Google Scholar]
23. E. Semsch, M. Jakob, D. Pavlicek and M. Pechoucek. (2009). “Autonomous UAV surveillance in complex urban environments,” in Proc. IEEE/WIC/ACM Int. Joint Conf. on Web Intelligence and Intelligent Agent Technology–Volume 02, Università degli Studi di Milano Bicocca, Milano, Italy. IEEE Computer Society, pp. 82–85. [Google Scholar]
24. N. H. Motlagh, M. Bagaa and T. Taleb. (2017). “UAV-based IoT platform: A crowd surveillance use case,” IEEE Communications Magazine, vol. 55, no. 2, pp. 128–134. [Google Scholar]
25. E. P. De Freitas, T. Heimfarth, I. F. Netto, C. E. Lino, C. E. Pereira. (2010). et al., “UAV relay network to support WSN connectivity,” in Proc. Int. Congress on Ultra-Modern Telecommunications and Control Systems, Moscow, Russia, pp. 309–314. [Google Scholar]
26. J. Xu, Y. Zeng and R. Zhang. (2018). “UAV-enabled wireless power transfer: Trajectory design and energy optimization,” IEEE Transactions on Wireless Communications, vol. 17, no. 8, pp. 5092–5206. [Google Scholar]
27. B. Liu, W. Zhang, W. Chen, H. Huang and S. Guo. (2020). “Online computation offloading and traffic routing for UAV swarms in edge-cloud computing,” IEEE Transactions on Vehicular Technology, vol. 69, no. 8, pp. 8777–8791. [Google Scholar]
28. J. Baek, S. I. Han and Y. Han. (2020). “Energy-efficient UAV routing for wireless sensor networks,” IEEE Transactions on Vehicular Technology, vol. 69, no. 2, pp. 1741–1750. [Google Scholar]
29. H. Yang and Z. Liu. (2019). “An optimization routing Protocol for FANETs,” EURASIP Journal on Wireless Communications and Networking, vol. 2019, no. 120, pp. 2–8. [Google Scholar]
30. A. Salam, Q. Javed, M. Fahad, G. Ali, M. Ahmad. (2021). et al., “Flying sensor network optimization using bee intelligence for IoTs,” in Proc. IntelliSys, London, UK, Advances in Intelligent Systems and Computing, vol. 1252, pp. 331–229. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |