DOI:10.32604/cmc.2021.014668
| Computers, Materials & Continua DOI:10.32604/cmc.2021.014668 | |
| Article |
Efficient UAV Communications: Recent Trends and Challenges
1Department of Electrical Engineering, Umm Al-Qura University, Makkah, 21961, Saudi Arabia
2Department of Electrical and Computer Engineering, COMSATS University Islamabad, 45550, Pakistan
3Department of Computer Science, College of Computer Science and Engineering, Taibah University Madinah, Saudi Arabia
*Corresponding Author: Mohammad Zubair Khan. Email: zubair.762001@gmail.com
Received: 07 October 2020; Accepted: 03 November 2020
Abstract: Unmanned Ariel Vehicles (UAVs) are flying objects whose trajectory can be remotely controlled. UAVs have lot of potential applications in the areas of wireless communications, internet of things, security, traffic management, monitoring, and smart surveying. By enabling reliable communication between UAVs and ground nodes, emergency notifications can be efficiently and quickly disseminated to a wider area. UAVs can gather data from remote areas, industrial units, and emergency scenarios without human involvement. UAVs can support ubiquitous connectivity, green communications, and intelligent wireless resource management. To efficiently use UAVs for all these applications, important challenges need to be investigated. In this paper, we first present a detailed classification of UAVs based on factors such as their size, communication range, weight, and flight altitude. We also explain the hardware system configuration and uses of these UAVs. We present a brief overview of recent work done related to three major challenges in UAVs. These challenges include trajectory control, energy efficiency and resource allocation. We also present three open challenges and future opportunities for efficient UAV communications. These include use of learning algorithms for resource allocation and energy efficiency in UAVs, intelligent surfaces-based communications for enhanced reliability in UAVs, and security algorithms to combat malicious attacks against UAVs.
Keywords: UAVs; resource allocation; energy efficiency; trajectory control
Unmanned Ariel Vehicles (UAVs) are objects that can fly around providing communications and logistic support for many applications. Key areas in which UAVs can benefit include efficient crop monitoring, delivery of goods, intelligent monitoring of places for security, carrying out surveys of various locations, developing a real time map, etc. [1–5]. In additions UAVs can support many Internet of Things (IoT) applications by providing real time and accurate sensing/monitoring data [5–10].
UAVs can also boost wireless communication performance by acting as reliable access and relay nodes. In rural areas where there is no Internet connectivity, UAVs can serve as Internet access provider. Similarly, for emergency communications, UAVs can play a vital role by taking the emergency messages and spreading the notification to other wireless nodes and control centers [11–15].
There are many important future applications where UAVs will be an integral part. UAVs will be deployed in Intelligent Transport Systems (ITS) for improving the city traffic management. In the area of agriculture, efficient spray of pesticides on crops can be performed using UAVs. Moreover, UAVs can also help in improving the security systems for military applications. Finally, emergency scenarios can greatly benefit from UAVs by effective communication between emergency nodes and helper nodes [15–18].
To effectively deploy UAVs for emergency communication scenarios, many important challenges need to be resolved. For example, UAVs are battery operated devices and energy efficiency will be an important part. Algorithms and protocols are needed to improve the overall lifetime of UAVs without requiring them to be recharged. Also, there will be many UAVs placed in an area and energy efficient load balancing is a key area that will impact the overall UAV efficiency.
Another area which requires research attention is trajectory control of UAVs. As UAVs are movable devices, their trajectory needs to be controlled in a manner that can improve the communication performance. The coverage range of UAVs needs to be enhanced and interference among UAVs needs to be reduced. Also, the UAVs need to reach the emergency area using shortest route in a quick time. Energy is also directly related to trajectory control. An optimal trajectory control algorithm will improve the energy efficiency of the system.
Resource allocation is another vital area of concern. Communication resources such as spectrum, transmission power, data rate and modulation need to be carefully selected to take the maximum benefit from UAVs. In this context, inter-UAV and UAV to other wireless nodes (vehicles and IoT nodes) cooperation will be needed to achieve maximum sum rate in the wireless system. Efficient resource allocation in turn improves the UAV energy efficiency by improving data transmissions, reducing number of collisions, and reducing number of retransmissions.
In this paper we focus on the three main challenges of UAVs for efficiency communications. These include trajectory control, energy efficiency and resource allocation. We present an overview of UAVs and UAV based communications. We provide a brief survey of recent work done to overcome these three challenges in UAVs. Finally, we present some of the open research challenges and future opportunities in the area of UAV based communications.
In this section, we first discuss UAVs and their working. We follow it up with a discussion on UAV based communications.
An unmanned aerial vehicle (UAV) (or Remotely piloted aircraft, commonly known as a drone) is an aircraft without a human control on board. It has configurable elements including a UAV, a ground-based control system, and communications system. The flight of UAVs may operate with various degrees of independence: either under remote control by a human controller or using on-board computers.
Various organizations have proposed formation of reference norms for the use of UAVs worldwide. The European Organization of UAVs (EUROUVS) has made up a group of UAV systems based on certain parameters [19,20]. For example, flight altitude, speed, size, range, weight and so on. The purpose of EUROUVS is to compile a universally accepted UAVs catalogs as well as their related short forms. The categories of UAVs given by EUROUVS are shown in Fig. 1. UAVs are classified into Micro/Mini UAVs, Tactical UAVs (Close Range CR, Short Range SR, Medium Range MR, Long Range LR, Endurance EN, Medium Altitude Long Range MALE), Strategic UAVs (High Altitude Long Endurance HALE), and Special task UAVs (Lethal LET, Decoys DEC, Stratospheric STRATO, and Exo-stratospheric EXO) [20].

Figure 1: Different type of UAVs and their properties [20]
Micro and Mini UAVs have a maximum takeoff weight of 0.1 and < 30 Kg respectively. The maximum flight altitude remains below 300 m. The endurance of these UAVs is less than 2 h. These UAVs operate at a communication range of up to 10 Km. We also show the hardware system configuration and uses of Micro and Mini UAVs in Fig. 2. The Micro UAVs use Black Widow, MicroStar, Microbat, FanCopter, QuattroCopter, Mos-quito, Hornet and Mite type of hardware. The uses of these UAVs are in the areas of scouting, Nuclear, Biological and Chemical (NBC) sampling, and surveillance inside buildings. Mini UAVs include hardware types of Mikado, Aladin, Tracker, DragonEye, Raven, Pointer II, Carolo C40/P50, Skorpio, R-Max and R-50, Robo-Copter, and YH-300S. Their uses are in film and broadcast industries, agriculture, pollution measurements, surveillance inside buildings, communications relay and Electronic Warfare (EW) [20].
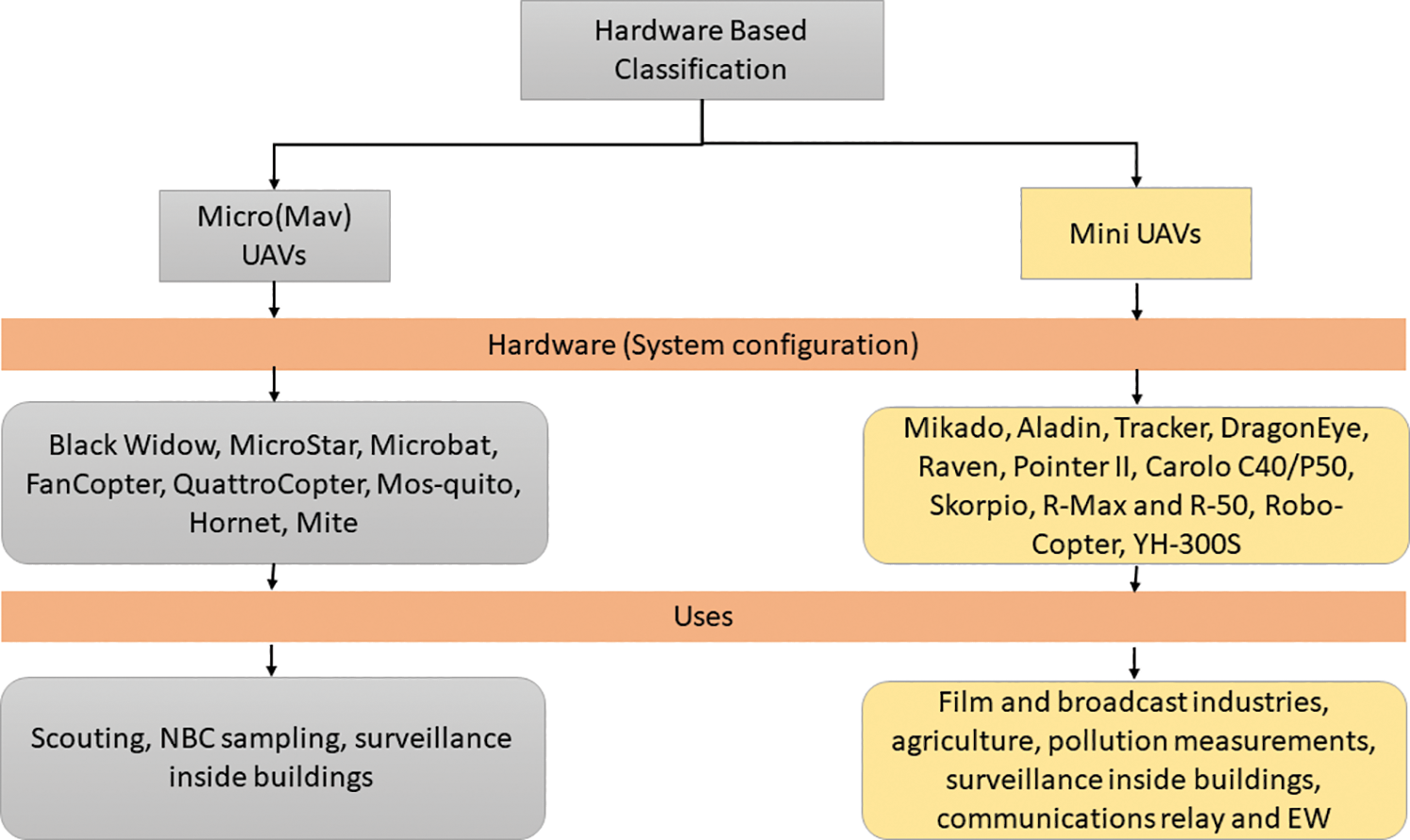
Figure 2: Hardware (system configuration) and uses of micro/mini UAVs [20]
Tactical UAVs can support a take off weight of around 150–1500 kg. The maximum flight altitude by these UAVs range up to 8000 m. The endurance for tactical UAVs varies from 2–48 h. Close Range (CR) tactical UAVs have an endurance of around 4 h whereas Medium Altitude Long Range (MALE) UAVs have an endurance of up to 48 h. Similarly, the communication range for CR UAVs is 30 m and for MALE UAVs is around 500 m. The hardware system configuration and uses of tactical UAVs is shown in Fig. 3. Their uses include Reconnaissance, Surveillance and Target Acquisition (RSTA), mine detection, search and rescue operations.

Figure 3: Hardware (system configuration) and uses of tactical UAVs [20]
Strategic UAVs can support highest takeoff weight of up to 12,500 Kg. The maximum flight altitude is 20,000 m. The endurance is up to 48 h. The strategic UAVs such as High Altitude Long Endurance (HALE) also has longest communication range of greater than 2000 Km. The hardware uses in strategic UAVs include Global Hawk, Raptor, Condor and many others as shown in Fig. 4. Their uses are in the areas of communication relays [20].
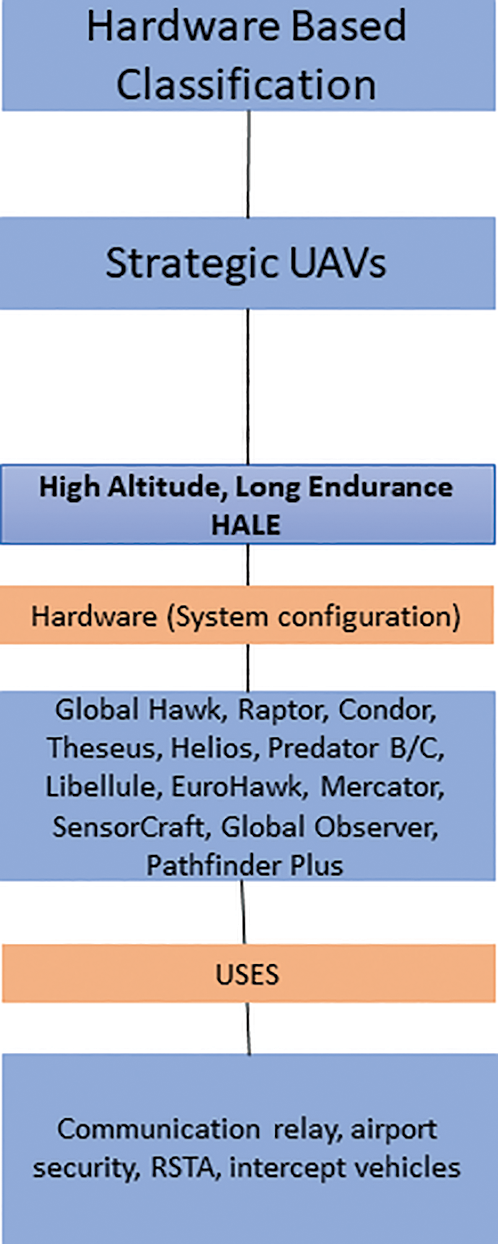
Figure 4: Hardware (system configuration) and uses of strategic UAVs [20]
Special Task UAVs can support a take off weight of 250 Kg. The maximum flight altitude supported is around 30,000 Kg by the Exo-stratospheric (EXO) UAVs. The endurance of these UAVs ranges from 3–48 h. The communication range for these UAVs can go up to 2000 Km. These UAVs use hardware of type MALI, Harpy, Lark, and Marula as shown in Fig. 5. The uses of these UAVs are in anti-radar, anti-ship, anti-aircraft, and anti-infrastructure systems [20].

Figure 5: Hardware (system configuration) and uses of special task UAVs [20]
There are several survey papers related to UAV communications [21–35]. These papers have surveyed the trends related to efficient communications, channel modeling, security, routing etc. Different from these surveys, our paper focuses on three main challenges of UAV communications. These challenges include trajectory control, energy efficiency and resource allocation. A key feature of our survey paper its to present the recent trends by reviewing most papers from 2019–2020. Our survey paper serves as a guide for researchers working in the area of 6G communications and massive IoT as UAV will be an integral part of the future wireless communications.
3 Review of Recent Trends in UAV Communications
In this section, we review recent trends in UAV communications. Particularly, we present the recent work done in three areas of trajectory control, energy efficiency and resource allocation.
As UAVs are mobile devices, optimal trajectory control is a key challenge which impacts connectivity with the ground base station as well as resource allocation. We show the recent work done in this area in Tab. 1. In [36], authors use cellular enabled UAVs that connect with a ground base station using cellular communications. The goal is to keep the connectivity intact during the mission of the UAVs and also minimize the time to reach the destination. Authors use convex optimization and graph theory techniques to achieve this goal. The achieved results include reduced mission completion time and improved SNR during the mission.
Table 1: Review of recent work in the area of UAV trajectory control
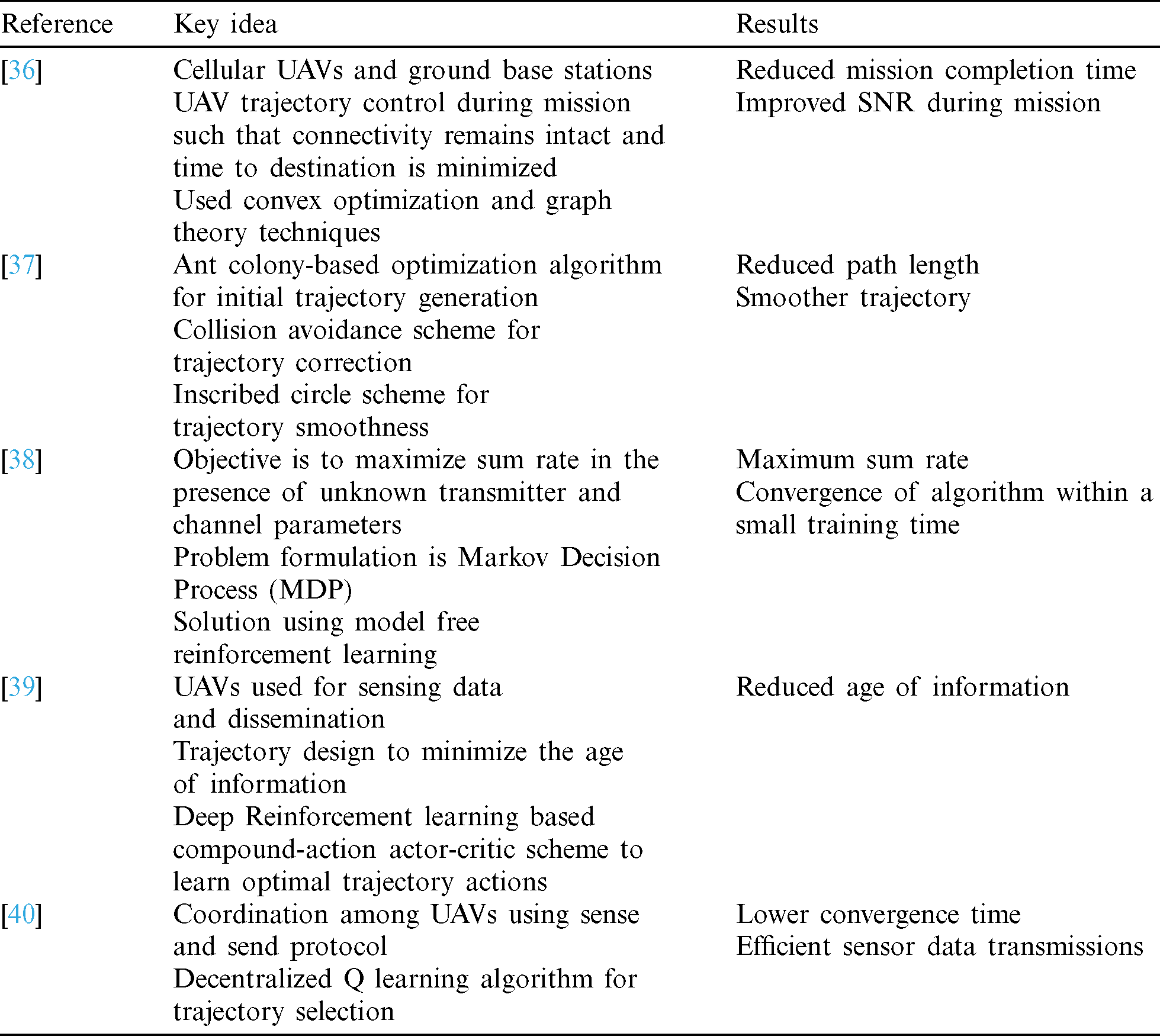
In [37], authors divide trajectory control procedure into three phases, trajectory generation, trajectory correction and trajectory smoothness. An ant-colony based optimization algorithm is used for initial trajectory generation. Moreover, a collision avoidance scheme is proposed for efficient movement of UAVs and correction of trajectory from the initially generated trajectory. Finally, inscribed circle scheme is used for trajectory smoothness. The proposed algorithm results in reduced path length and smoother trajectory.
Authors in [38] maximize the sum-rate in a scenario where transmitter parameters such as transmission power and data rate, and channel parameters such as propagation path information is not known. The problem is formulated as a Markov Decision Process (MDP) and solved using model free reinforcement learning. Results show maximum sum rate and convergence of algorithm within a small training time.
The work in [39] used UAVs for sensing purposes to support IoT applications. UAVs disseminate the sensed data and design the trajectory such that age of information is minimized. The proposed algorithm uses deep reinforcement learning based compound-action actor-critic scheme to learn the optimal trajectory actions. Results show that the proposed algorithm achieves reduced age of information.
In [40], authors coordinate among UAVs to avoid collisions. Coordination is achieved using a sense and send protocol. The key idea is to use decentralized Q-learning algorithm to find optimal trajectory actions. The proposed algorithm lowers the convergence time and achieves efficient sensor data transmission.
Energy efficiency is an important challenge for UAVs as they are battery operated devices, and it is difficult to recharge them periodically. We present recent work done in this area in Tab. 2.
Table 2: Review of recent work in the area of UAV energy efficiency
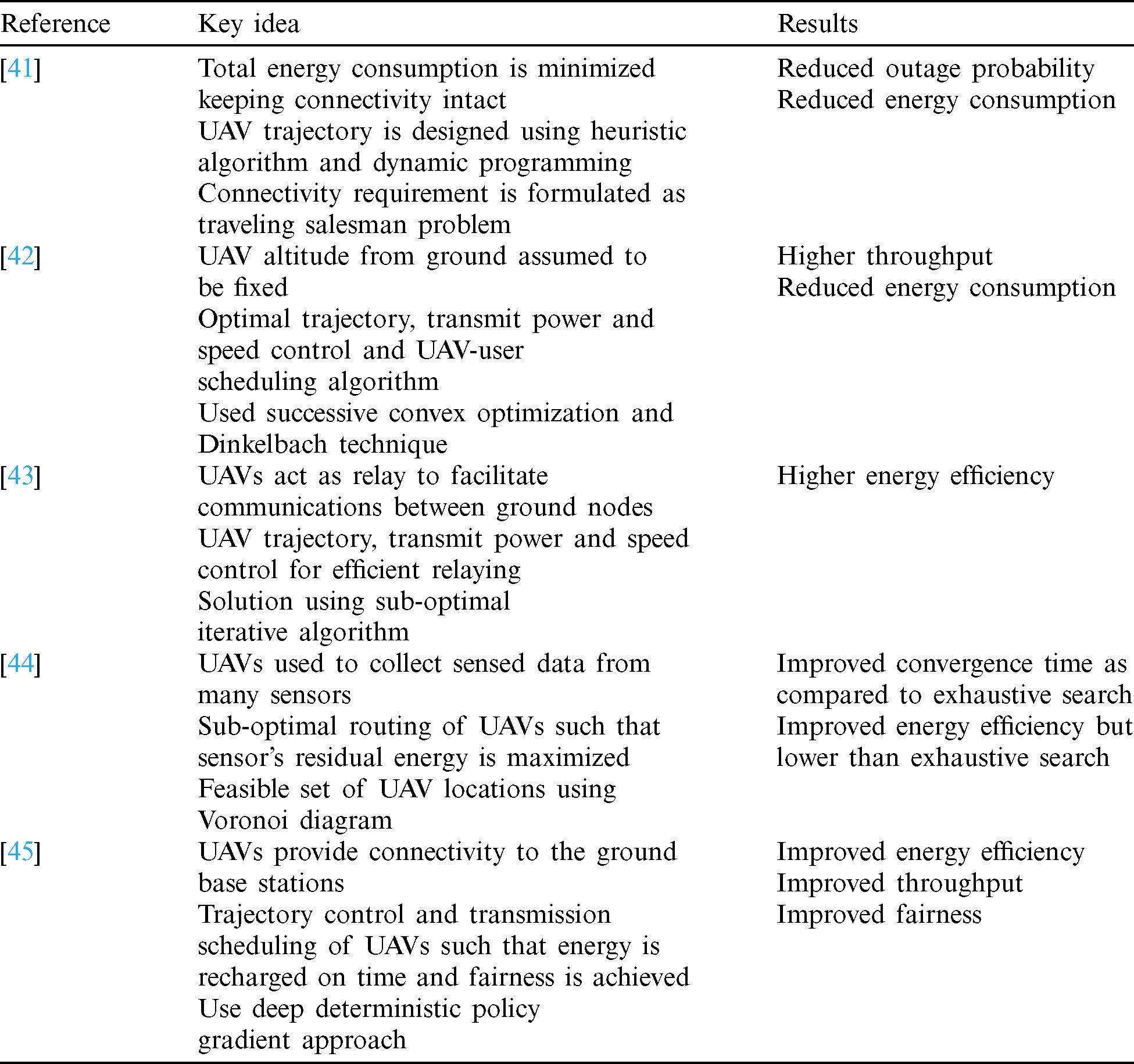
Authors in [41] minimized total energy consumption by UAVs while keeping the connectivity with the ground base station intact. UAV trajectory is designed using two algorithms. The first algorithm uses heuristic approach whereas the second algorithm works on dynamic programming. Connectivity requirements are formulated as traveling salesman problem. Results show reduced outage probability and reduced energy consumption by the proposed protocol.
The work in [42] assumes UAV to be at a fixed altitude from the ground. The proposed technique jointly optimizes trajectory, transmit power and speed of the UAVs. UAV-user scheduling is also considered as part of the optimization problem which is solved using successive convex optimization and Dinkelbach technique. The proposed algorithm achieves higher throughput and reduced energy consumption.
In [43], UAVs act as relays to facilitate communication between ground nodes. The authors optimize the important parameters of UAVs including trajectory, transmit power and speed such that the data is efficiently relayed from one ground to the other ground node using the UAV relay. The optimization problem is solved using a sub-optimal iterative algorithm. Using the proposed relaying technique, UAVs are able to achieve higher energy efficiency.
The work in [44] uses UAVs for sensor data collection, where many sensors are deployed for IoT applications. A sub-optimal routing of UAVs is proposed that maximizes the residual energy of all the sensors. From the set of possible UAV locations, feasible locations are found using Voronoi diagram. As compared to exhaustive search, the proposed technique has low convergence time. While the protocol improves the energy efficiency than random trajectory selection, the exhaustive search still has better performance albeit higher complexity.
In [45], UAVs provide efficient connectivity to the ground base stations. The authors control the trajectory and transmission scheduling of UAVs such that they do not deplete during their working. In other words, the energy is always recharged on time before UAVs stop working. The protocol also achieves fairness of energy consumption among UAVs. The approach used to achieve energy efficiency is deep deterministic policy gradient. Results show improved energy efficiency, throughput and fairness of energy consumption.
Resource allocation is an important challenge that enables efficiency use of UAV for many applications. In this sub-section, we present recent work in the area of efficient resource allocation for UAVs. The recent works and their key ideas are shown in Tab. 3.
Table 3: Review of recent work in the area of UAV resource allocation
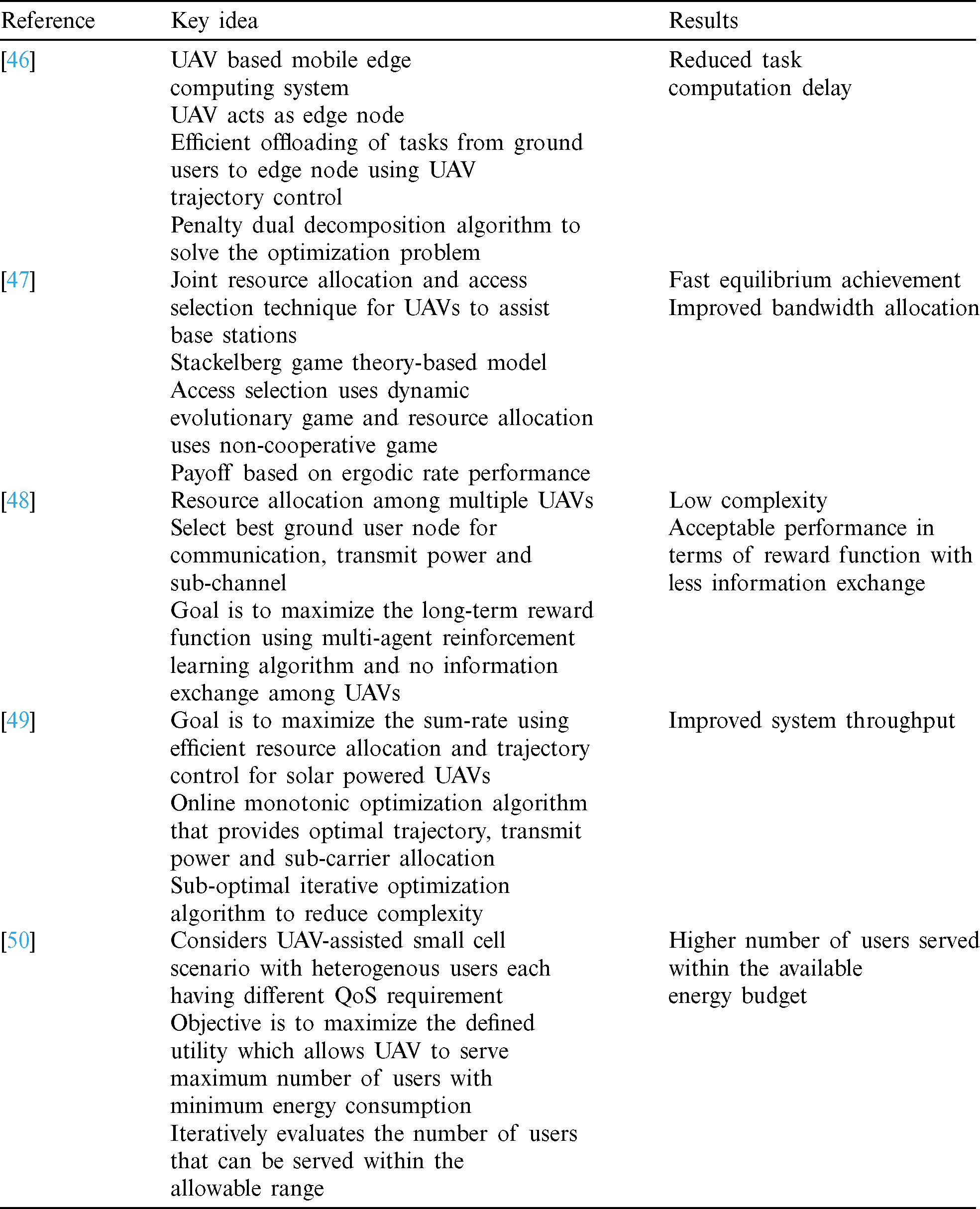
The work in [46] proposed a UAV based mobile edge computing system where UAVs acts as edge nodes. The authors propose efficient offloading of tasks from ground users to edge nodes i.e., UAVs. This is achieved using optimal UAV trajectory control. Penalty dual decomposition algorithm is used to solve the above formulated optimization problem. Results highlight the reduced task computation delay achieved by the proposed technique.
In [47], authors jointly optimize resource allocation and access selection for UAVs to assist ground base stations. A Stackelberg based game theoretical model is developed in this context. To solve access selection problem, dynamic evolutionary game theory is used. Resource allocation is handled by non-cooperative game model. The payoffs are selected based on ergodic rate performance. The technique achieves fast equilibrium state while improving the bandwidth allocation.
Authors in [48] propose resource allocation among multiple UAVs. The goal is to select optimal ground user node for communication, transmit power of UAVs, and sub-channel for transmission. The proposed technique maximizes the long-term reward function using multi-agent reinforcement learning algorithm. A key feature of the proposed learning algorithm is that it works without any information exchange among UAVs. Results conclude that proposed technique has low complexity, and acceptable performance in terms of reward function with less information exchange.
The work in [50] considers UAV-assisted small cell scenario with heterogenous users each having different QoS requirements. The target of the protocol is to maximize the defined utility which allows UAV to serve maximum number of users with minimum energy consumption. The key idea of the protocol is to iteratively evaluate the number of users that can be served within the allowable range. Results highlight the improved performance of the protocol in terms of higher number of users served within the available energy budget.
4 Future Challenges and Opportunities
In this section, we highlight the future challenges and opportunities related to UAV communications. We discuss three important possibilities for future work, namely, learning algorithms, intelligent surfaces and security.
Machine learning algorithms have been recently used for solving challenges related to UAVs such as resource allocation and energy efficiency. As the UAVs have freedom to operate and perform tasks from remote locations or locate computers inside the UAVs, data collection is an important challenge for UAVs. With efficient and accurate data collection, machine learning algorithms can facilitate UAVs to accurate analysis, control, and predictions in wireless networks. As an example, random forest technique which is an ensemble learning technique, can be used for improving data classification. Federated learning can be used for developing accurate global machine learning models based on distributed local machine learning models (based on local UAV data). Similarly, deep learning models need to be investigated for quicker convergence time of machine learning algorithms in the context of UAVs.
Intelligent surfaces are another technology that can improve the signal propagation between transmitter and receiver. This can be achieved by placing meta-surfaces at different locations whose phase shift can be programmed remotely and can reflect the transmitted signals to improve reliability of transmission. UAV to ground station transmission can also take benefit from these intelligent surfaces. In this context, efficient use of intelligent surfaces, optimal phase shift design of meta-surfaces and resource allocation in this new system model needs to be investigated.
Security and privacy are key concerns when using UAVs to improve network connectivity and use them for IoT applications. UAVs are prone to attacks by malicious users that can disrupt the confidentiality, privacy, and data integrity. In this context, recent techniques such as blockchains and physical layer security requires thorough research and evaluation. In particular, future research must focus on level of security provided by these techniques for UAV communications, and quality of service and reliability tradeoff.
In this paper, we present a brief review of recent work done in the area of UAV communications. We discuss the working of UAVs, and important challenges for efficient UAV based communications. We review the recent trends in the three main areas, namely trajectory control, energy efficiency and resource allocation. We also discuss the future challenges and opportunities that can further improve UAV based communications.
Acknowledgement: We thank the deanship of scientific research at Umm Al-Qura University for providing funding for this research.
Funding Statement: The project was funded under Grant Number 19-ENG-1-01-0015.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. H. Baek and J. Lim. (2018). “Design of future UAV-relay tactical data link for reliable UAV control and situational awareness,” IEEE Communications Magazine, vol. 56, no. 10, pp. 144–150.
2. C. Zhang, W. Zhang, W. Wang, L. Yang and W. Zhang. (2019). “Research challenges and opportunities of UAV millimeter-wave communications,” IEEE Wireless Communications, vol. 26, no. 1, pp. 58–62.
3. B. Shang, V. Marojevic, Y. Yi, A. S. Abdalla and L. Liu. (2020). “Spectrum sharing for UAV communications: Spatial spectrum sensing and open issues,” IEEE Vehicular Technology Magazine, vol. 15, no. 2, pp. 104–112.
4. O. Bekkouche, K. Samdanis, M. Bagaa and T. Taleb. (2020). “A service-based architecture for enabling UAV enhanced network services,” IEEE Network, vol. 34, no. 4, pp. 328–335.
5. H. Hellaoui, O. Bekkouche, M. Bagaa and T. Taleb. (2018). “Aerial control system for spectrum efficiency in UAV-to-cellular communications,” IEEE Communications Magazine, vol. 56, no. 10, pp. 108–113.
6. L. Wang, Y. L. Che, J. Long, L. Duan and K. Wu. (2019). “Multiple access mmwave design for UAV-aided 5G communications,” IEEE Wireless Communications, vol. 26, no. 1, pp. 64–71.
7. Q. Wu, L. Liu and R. Zhang. (2019). “Fundamental trade-offs in communication and trajectory design for UAV-enabled wireless network,” IEEE Wireless Communications, vol. 26, no. 1, pp. 36–44.
8. U. Challita, A. Ferdowsi, M. Chen and W. Saad. (2019). “Machine learning for wireless connectivity and security of cellular-connected UAVs,” IEEE Wireless Communications, vol. 26, no. 1, pp. 28–35.
9. R. Verdone and S. Mignardi. (2018). “Joint aerial-terrestrial resource management in UAV-aided mobile radio networks,” IEEE Network, vol. 32, no. 5, pp. 70–75.
10. F. Qi, X. Zhu, G. Mang, M. Kadoch and W. Li. (2019). “UAV network and IoT in the sky for future smart cities,” IEEE Network, vol. 33, no. 2, pp. 96–101. [Google Scholar]
11. J. Hu, H. Zhang, L. Song, Z. Han and H. V. Poor. (2020). “Reinforcement learning for a cellular internet of UAVs: Protocol design, trajectory control, and resource management,” IEEE Wireless Communications, vol. 27, no. 1, pp. 116–123. [Google Scholar]
12. Y. Liu, Z. Qin, Y. Cai, Y. Gao, G. Y. Li. (2019). et al., “UAV communications based on non-orthogonal multiple access,” IEEE Wireless Communications, vol. 26, no. 1, pp. 52–57. [Google Scholar]
13. Z. Yuan, J. Jin, L. Sun, K. Chin and G. Muntean. (2018). “Ultra-reliable IoT communications with UAVs: A swarm use case,” IEEE Communications Magazine, vol. 56, no. 12, pp. 90–96. [Google Scholar]
14. L. Wang, H. Yang, J. Long, K. Wu and J. Chen. (2018). “Enabling ultra-dense UAV-aided network with overlapped spectrum sharing: Potential and approaches,” IEEE Network, vol. 32, no. 5, pp. 85–91. [Google Scholar]
15. L. Zhang, L. Bai, X. Zhang, Y. Zhang, L. Yang. (2019). et al., “Cultivated land monitoring system based on dynamic wake-up UAV and wireless of distributed storage,” Computers, Materials & Continua, vol. 61, no. 2, pp. 817–828. [Google Scholar]
16. Y. Zhang, Y. Deng, Y. Liu and L. Wang. (2019). “Dynamics modeling and stability analysis of tilt wing unmanned aerial vehicle during transition,” Computers, Materials & Continua, vol. 59, no. 3, pp. 833–851.
17. N. Lin, J. Tang, X. Li and L. Zhao. (2019). “A novel improved BAT algorithm in UAV path planning,” Computers, Materials & Continua, vol. 61, no. 1, pp. 323–344.
18. Z. Zhang, J. Zhang, P. Wang and L. Chen. (2019). “Research on operation of UAVs in non-isolated airspace,” Computers Materials & Continua, vol. 57, no. 1, pp. 151–166. [Google Scholar]
19. G. Singhal, B. Bansod and L. Mathew. (2018). “Unmanned aerial vehicle classification applications and challenges: A review,” Preprints, 2018110601. [Google Scholar]
20. M. N. Bento. (2008). “Unmanned aerial vehicles: An overview,” Inside GNSS, vol. 3, no. 3, pp. 54–61. [Google Scholar]
21. L. Zhang, H. Zhao, S. Hou, Z. Zhao, H. Xu. (2019). et al., “A survey on 5G millimeter wave communications for UAV-assisted wireless networks,” IEEE Access, vol. 7, pp. 117460–117504. [Google Scholar]
22. O. Maraqa, A. S. Rajasekaran, S. Al-Ahmadi, H. Yanikomeroglu and S. M. Sait, “A survey of rate-optimal power domain NOMA with enabling technologies of future wireless networks,” IEEE Communications Surveys & Tutorials, to appear. [Google Scholar]
23. A. A. Khuwaja, Y. Chen, N. Zhao, M. S. Alouini and P. Dobbins. (2018). “A survey of channel modeling for UAV communications,” IEEE Communications Surveys & Tutorials, vol. 20, no. 4, pp. 2804–2821. [Google Scholar]
24. M. E. Mkiramweni, C. Yang, J. Li and W. Zhang. (2019). “A survey of game theory in unmanned aerial vehicles communications,” IEEE Communications Surveys & Tutorials, vol. 21, no. 4, pp. 3386–3416. [Google Scholar]
25. C. Yan, L. Fu, J. Zhang and J. Wang. (2019). “A comprehensive survey on UAV communication channel modeling,” IEEE Access, vol. 7, pp. 107769–107792. [Google Scholar]
26. A. Fotouhi, H. Qiang, M. Ding, M. Hassan, L. G. Giordano. (2019). et al., “Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges,” IEEE Communications Surveys & Tutorials, vol. 21, no. 4, pp. 3417–3442. [Google Scholar]
27. S. Hayat, E. Yanmaz and R. Muzaffar. (2016). “Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint,” IEEE Communications Surveys & Tutorials, vol. 18, no. 4, pp. 2624–2661. [Google Scholar]
28. M. Mozaffari, W. Saad, M. Bennis, Y. H. Nam and M. Debbah. (2019). “A tutorial on UAVs for wireless networks: Applications, challenges, and open problems,” IEEE Communications Surveys & Tutorials, vol. 21, no. 3, pp. 2334–2360. [Google Scholar]
29. B. Li, Z. Fei and Y. Zhang. (2019). “UAV communications for 5G and beyond: Recent advances and future trends,” IEEE Internet of Things Journal, vol. 6, no. 2, pp. 2241–2263. [Google Scholar]
30. S. Aggarwal, N. Kumar and S. Tanwar, “Blockchain envisioned UAV communication using 6G networks: Open issues, use cases, and future directions,” Internet of Things Journal. [Google Scholar]
31. D. Shumeye Lakew, U. Sa’ad, N. N. Dao, W. Na and S. Cho. (2020). “Routing in flying ad hoc networks: A comprehensive survey,” IEEE Communications Surveys & Tutorials, vol. 22, no. 2, pp. 1071–1120. [Google Scholar]
32. O. Sami Oubbati, M. Atiquzzaman, T. Ahamed Ahanger and A. Ibrahim. (2020). “Softwarization of UAV networks: A survey of applications and future trends,” IEEE Access, vol. 8, pp. 98073–98125. [Google Scholar]
33. W. Khawaja, I. Guvenc, D. W. Matolak, U. C. Fiebig and N. Schneckenburger. (2019). “A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles,” IEEE Communications Surveys & Tutorials, vol. 21, no. 3, pp. 2361–2391. [Google Scholar]
34. Z. Ullah, F. Al-Turjman and L. Mostarda. (2020). “Cognition in UAV-aided 5G and beyond communications: A survey,” IEEE Transactions on Cognitive Communications and Networking, vol. 6, no. 3, pp. 872–891. [Google Scholar]
35. L. Gupta, R. Jain and G. Vaszkun. (2016). “Survey of important issues in UAV communication networks,” IEEE Communications Surveys & Tutorials, vol. 18, no. 2, pp. 1123–1152. [Google Scholar]
36. S. Zhang, Y. Zeng and R. Zhang. (2019). “Cellular-enabled UAV communication: A connectivity-constrained trajectory optimization perspective,” IEEE Transactions on Communications, vol. 67, no. 3, pp. 2580–2604. [Google Scholar]
37. B. Li, X. Qi, B. Yu and L. Liu. (2020). “Trajectory planning for UAV based on improved ACO algorithm,” IEEE Access, vol. 8, pp. 2995–3006. [Google Scholar]
38. S. Yin, S. Zhao, Y. Zhao and F. R. Yu. (2019). “Intelligent trajectory design in UAV-aided communications with reinforcement learning,” IEEE Transactions on Vehicular Technology, vol. 68, no. 8, pp. 8227–8231. [Google Scholar]
39. J. Hu, H. Zhang, L. Song, R. Schober and H. V. Poor, “Cooperative internet of UAVs: Distributed trajectory design by multi-agent deep reinforcement learning,” IEEE Transactions on Communications. [Google Scholar]
40. J. Hu, H. Zhang and L. Song. (2019). “Reinforcement learning for decentralized trajectory design in cellular UAV networks with sense-and-send protocol,” IEEE Internet of Things Journal, vol. 6, no. 4, pp. 6177–6189. [Google Scholar]
41. H. D. Tran, T. X. Vu, S. Chatzinotas, S. Shahbazpanahi and B. Ottersten, “Coarse trajectory design for energy minimization in UAV-enabled wireless communications with latency constraints,” IEEE Transactions on Vehicular Technology. [Google Scholar]
42. S. Ahmed, M. Z. Chowdhury and Y. M. Jang. (2020). “Energy-efficient UAV-to-user scheduling to maximize throughput in wireless networks,” IEEE Access, vol. 8, pp. 21215–21225. [Google Scholar]
43. S. Ahmed, M. Z. Chowdhury and Y. M. Jang. (2020). “Energy-efficient UAV relaying communications to serve ground nodes,” IEEE Communications Letters, vol. 24, no. 4, pp. 849–852. [Google Scholar]
44. J. Baek, S. I. Han and Y. Han. (2020). “Energy-efficient UAV routing for wireless sensor networks,” IEEE Transactions on Vehicular Technology, vol. 69, no. 2, pp. 1741–1750. [Google Scholar]
45. H. Qi, Z. Hu, H. Huang, X. Wen and Z. Lu. (2020). “Energy efficient 3-D UAV control for persistent communication service and fairness: A deep reinforcement learning approach,” IEEE Access, vol. 8, pp. 53172–53184. [Google Scholar]
46. Q. Hu, Y. Cai, G. Yu, Z. Qin, M. Zhao. (2019). et al., “Joint offloading and trajectory design for UAV-enabled mobile edge computing systems,” IEEE Internet of Things Journal, vol. 6, no. 2, pp. 1879–1892. [Google Scholar]
47. S. Yan, M. Peng and X. Cao. (2019). “A game theory approach for joint access selection and resource allocation in UAV assisted IoT communication networks,” IEEE Internet of Things Journal, vol. 6, no. 2, pp. 1663–1674. [Google Scholar]
48. J. Cui, Y. Liu and A. Nallanathan. (2020). “Multi-agent reinforcement learning-based resource allocation for UAV networks,” IEEE Transactions on Wireless Communications, vol. 19, no. 2, pp. 729–743. [Google Scholar]
49. Y. Sun, D. Xu, D. W. K. Ng, L. Dai and R. Schober. (2019). “Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems,” IEEE Transactions on Communications, vol. 67, no. 6, pp. 4281–4298. [Google Scholar]
50. P. Lohan and D. Mishra. (2020). “Utility-aware optimal resource allocation protocol for UAV-assisted small cells with heterogeneous coverage demands,” IEEE Transactions on Wireless Communications, vol. 19, no. 2, pp. 1221–1236. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |