DOI:10.32604/cmc.2021.017568
| Computers, Materials & Continua DOI:10.32604/cmc.2021.017568 | |
| Article |
Noise Reduction in Industry Based on Virtual Instrumentation
1Faculty of Electrical Engineering and Computer Science, Department of Cybernetics and Biomedical Engineering, VSB–Technical University of Ostrava, 708 00, Ostrava-Poruba, Czechia
2Faculty of Electrical Engineering, Automatic Control and Informatics, Opole University of Technology, Opole, Poland
3Faculty of Electrical Engineering and Computer Science, Department of Telecommunications, VSB–Technical University of Ostrava, 708 00, Ostrava-Poruba, Czechia
*Corresponding Author: Jan Nedoma. Email: jan.nedoma@vsb.cz
Received: 03 February 2021; Accepted: 13 April 2021
Abstract: This paper discusses the reduction of background noise in an industrial environment to extend human-machine-interaction. In the Industry 4.0 era, the mass development of voice control (speech recognition) in various industrial applications is possible, especially as related to augmented reality (such as hands-free control via voice commands). As Industry 4.0 relies heavily on radiofrequency technologies, some brief insight into this problem is provided, including the Internet of things (IoT) and 5G deployment. This study was carried out in cooperation with the industrial partner Brose CZ spol. s.r.o., where sound recordings were made to produce a dataset. The experimental environment comprised three workplaces with background noise above 100 dB, consisting of a laser/magnetic welder and a press. A virtual device was developed from a given dataset in order to test selected commands from a commercial speech recognizer from Microsoft. We tested a hybrid algorithm for noise reduction and its impact on voice command recognition efficiency. Using virtual devices, the study was carried out on large speakers with 20 participants (10 men and 10 women). The experiments included a large number of repetitions (100 times for each command under different noise conditions). Statistical results confirmed the efficiency of the tested algorithms. Laser welding environment efficiency was 27% before applied filtering, 76% using the least mean square (LMS) algorithm, and 79% using LMS + independent component analysis (ICA). Magnetic welding environment efficiency was 24% before applied filtering, 70% with LMS, and 75% with LMS + ICA. Press workplace environment efficiency showed no success before applied filtering, was 52% with LMS, and was 54% with LMS + ICA.
Keywords: 5G; hybrid algorithms; signal processing; speech recognition
Spoken word is still one of the most natural ways to directly transfer information between people [1,2]. Direct voice interaction with computers and machinery is slowly gaining in importance, as the industry is shifting towards the Industry 4.0 concept [3]. Voice communication systems are increasingly integrated into both industry and private life due to their significant benefits. Most applications are currently limited to a small set of tasks performed by specific machines using predetermined commands that they can recognize [4]. These systems are particularly useful when the operator must do several things at once.
In smart homes, control takes place between the device and the local gateway by power line communication (PLC), Transmission Control Protocol (TCP), or Message Queue Telemetry Transport (MQTT) protocol, which enables control through suitable clients (e.g., a smartphone or Amazon Alexa) [5].
A digital voice system was also designed for use with the internet of things (IoT) to control and simulate the process of an assisted robotic load as part of better human-robot interaction (HMI) [6].
He et al. [7] designed a well-known Arduino board with motion sensors and an audio receiver to control a robotic car using a cloud server and IoT technology, using preset voice commands integrated with Google Voice API.
Industrial applications often rely on radio-frequency technologies, such as Wi-Fi, IoT technologies (e.g., SigFox or LoRa), or broadband cellular networks (4G and 5G). In particular, 5G is often considered as a tool for artificial intelligence (AI), Industry 4.0, and IoT. New communication standards are resilient, and designed with smart sensors or devices and machine communication in mind. Its latency is much less than that of 4G, and it is considerably faster. Reliability is reaching levels of wired connections, but this is limited by the vast scope of manufacturing plants and Industry 4.0. However, 5G opens new fields of application in industry where conventional Wi-Fi fell short in the past. IoT and Industry 4.0 sensors are ever expanding–it is estimated that in 2022, almost 70 billion devices will be connected to IoT networks. Cellular networks often offer unparalleled coverage and scalability with robust and reliable connection. Manufacturers are expanding their plants by employing smart sensors to track cargo or employees, or to gather manufacturing data. The potential value can fuel the rise of automated factories. Automated vision quality checks, augmented reality construction, predictive maintenance, system-wide real-time processing control, and automated guided vehicles are the future of Industry 4.0. While low-power, wide-area solutions are sufficient for some simple connected devices, the opposite is true in manufacturing, where machines are data-intensive and in close proximity. The power of modern software-defined networks and the scalability supported in 5G networks offer a more agile and efficient model based on software rather than traditional hardware solutions. Virtual networks (or network slicing) and subnets adjusted to specific needs are possible with 5G. The 3rd Generation Partnership Project (3GPP) is working on a 17th release of mobile networks (expanding 4G and 5G), which was to be completed in 2022–2023, but may arrive later due to the ongoing COVID pandemic. Various teams are focusing on industrial deployment of 5G networks, including industrial IoT enhancement, IoT over non-terrestrial networks, dynamic power saving, Narrowband IoT enhancement, proximity-based services, and 5G-based location services. While the presented paper focuses on direct data gathering, it can be considered a work in progress.
A combination of sensors such as Raspberry Pi, cameras, and other inputs (voice, text, and visual) were used to facilitate laboratory communication [8]. While studying the implementation of voice control of operational and technical functions in the virtualization of a production line, Kennedy et al. [9] investigated a passive attack called a fingerprinting attack and found that it may be possible to correctly derive up to 33.8% of voice commands just by eavesdropping on encrypted traffic.
Objectives of this work are as follows:
• Control assurance of operating and technical functions in the production line (production line on/off, arm activation, belt on, laser welder on/off, magnetic welder on/off, press on/off);
• Particular command recognition assurance for the control of operational and technical functions in the production line;
• Provision of a data connection between speech recognition technologies;
• Additive noise suppression in speech signals using the least mean square (LMS) algorithm and the independent component analysis (ICA).
• Ensuring the highest possible efficiency in voice command recognition in a real environment with additive noise.
Speech signal processing is a promising research area. Automatic speech recognition, synthetic speech, and natural language processing will have a significant impact in business and industry [10–12].
The most important problems are related to automated or semi-automated equipment control (e.g., heating, cooling, lighting, ventilation, and air conditioning). Amrutha (MATLAB implementation) is one of the most successful tools used for spoken word identification in industrial environments, with success rates of up to 90% [13], and Kamdar and Kango are often used for smart home appliances [14–17].
Voice interaction is the most natural form of human interpersonal communication. Direct voice commands make it easy to control smart devices without time-consuming training. However, such a system controllable from multiple locations, requires a smart array of microphones and speakers connected to a centralized processor unit [18].
Automatic Speech Recognition (ASR) can be divided into three basic groups [19,20]:
• Isolated word recognition systems (voice commands are used separately, such as in banking or airport telephone services);
• Small systems for application commands and controls;
• Large systems for continuous speech applications.
As regards ASR, systems applied directly in industry are a mix of the second and third groups, which employ grammatically limited commands for administration and control purposes [19]. ASR systems can also be classified by voice interaction into two categories [18]:
• Specific control applications, which create the essence of smart homes (voice control of operational and technical functions and devices);
• General voice applications, which can be used in all ASR systems.
Obaid et al. [21] showed the system’s broad applicability not only in industry but for personal use. Our proposed system consists of voice recognition and wireless systems, implemented with LabVIEW software and ZigBee modules, respectively. The system’s greatest advantage is that it must be trained only once. The required operations are performed based on the data received and stored in the wireless receiver, which is connected directly to the device.
A similar system, designed by Thakur et al. [22], can be used as a stand-alone portable unit to wirelessly control lights, fans, air conditioners, televisions, security cameras, electronic doors, computer systems, and audiovisual equipment [18].
Boeing is incorporating ASR in the new X-32 Strike Fighter aircraft, making it easier for the pilot to control the aircraft and focus on higher-priority aspects of a mission [10,23].
It is possible to regulate multiple factors of ASR systems, mainly speech variability, which is generally of limited use. The flexibility of the language can be limited by a suitable grammatical design. The ability to accurately recognize captured speech depends primarily on the size of the dictionary and the signal-to-noise ratio (SNR). Thus, recognition can be improved by reducing the vocabulary and by improving the SNR. Vocabulary restrictions in Voice Intelligence systems are based on the specific grammar. Reducing vocabulary, such as by shortening individual commands, can significantly improve recognition [24,25]. The quality of captured speech also affects recognition accuracy [26].
Real-time response is another requirement. Three aspects affect system performance [27]:
• Recognition speed;
• Memory requirements;
• Recognition accuracy.
It is challenging to combine all three aspects, as they tend to conflict with each other; e.g., it is relatively easy to improve recognition speed while reducing memory at the expense of accuracy of recognition.
ASR systems can also be found in industrial applications such as robotics, where today’s powerful, inexpensive microprocessors and advanced algorithms control commercial applications in the areas of computer interaction, data entry, speech-to-text conversion, telephony, and voice authentication. Robust recognition systems for control and navigation are currently available in personal computers [22].
ASR systems are widely used in other fields, such as wheelchair management [28], defense and aviation [29], and telecommunications.
The IoT platform [30] within a cyber-physical system [31] can be understood as a combination of physical [32], network [33], and computational processes [34,35], and is important in simultaneous voice recognition.
Speech contains information usually obtained by processing a speech signal captured by a microphone through sampling, quantization, coding [36], parameterization, preprocessing, segmentation, centering, pre-emphasis, and window weighting [37,38].
• A statistical approach for continuous speech recognition using perceptual linear prediction (PLP) of speech [39–42], such as:
○ Audio-to-visual conversion in MPEG-4 [43];
○ Acoustic element modeling and extraction [44];
○ Speech detectors [45] or training of hybrid neural networks for acoustic modeling in automatic speech recognition [46].
• RASTA (RelAtive SpecTrAl) method [36]
• Mel-frequency cepstral analysis (MFCC), such as:
○ Reduction of the pathological system of voice quality evaluation dimensions [47];
○ Detection of clinical depression in adolescents [48];
○ Smart wheelchair speech recognition [49];
○ Speech recognition using spoken word signals [50].
• Hidden Markov models (HMMs) [51]
• Artificial neural networks (ANNs) [52], such as:
○ Automatic speech recognition (ASR) for speech therapy and phased patients [53];
○ Rapid adaptation of neural networks based on speech recognition codes [54];
○ A combination of the functions of the HMM/MLP hybrid system and HMM/GMM speech recognition system [55];
○ Hybrid systems for continuous speech recognition HMM, MLP, and SVM [56].
• Suppression of additive noise using single-or multi-channel methods [57], such as:
○ Speech enhancement using spectral subtraction algorithms [58];
○ Complex adaptive signal processing methods [59,60];
○ Model speech enhancement [61,62];
○ Improved removal of additive noise by spectral subtraction [63];
○ Reduction of speech signal noise by wavelet transform with adjusted universal threshold value [64] or suppression of speech signals by wavelet transform [65].
• Multi-channel methods, including:
○ Least medium quadrature (LMS) algorithm [66,67];
○ Recursive least squares (RLS) [68,69];
○ Independent component analysis (ICA) [70,71];
○ Principal component analysis (PCA) [72,73] or beamforming (BF) for speech acquisition in noisy environments [74] for linearly constrained adaptive beamforming [75] with a robust algorithm [76].
2.1 Classification of Speech Signal Processing Methods
Algorithms are applied to improve the quality of speech signals before processing them in speech recognition applications. These algorithms increase the intelligibility of speech signals and suppress interference while minimizing the loss of useful information. They can be categorized as adaptive or non-adaptive methods.
Adaptive methods use a learning system that changes coefficients based on the working environment. They rely on continuous adjustments of control parameters influenced by fluctuations of environment or input and auxiliary signals. The basic element is feedback, which is used to adjust the parameters of the filter. These methods use a speech-to-noise signal as an input. The noise signal is used as a reference, which is subtracted to filter the speech signal. There are two categories of adaptive methods [66,77]:
• Linear filters are derived from a linear time-invariant system or one to which the principle of superposition applies. These include the Kalman filter, LMS, RLS, and the adaptive linear neuron (ADALINE).
• Nonlinear filters are not subject to the principle of superposition. They include the adaptive neuro-fuzzy inference system (ANFIS), multi-layer neural networks, and evolutionary algorithms.
Non-adaptive methods do not apply a learning system, and hence require no reference signal containing only noise. A speech signal with noise is sufficient. These methods can be categorized as follows:
• Multi-channel methods perform sensing using multiple microphones, where the primary one acquires the noisy speech signal and the others pick up only interference. Two or more channels may sense noisy speech signals in different places. Methods include ICA, PCA, singular value decomposition (SVD), and periodic component analysis (μCA) [58,77].
• Single-channel methods require only one channel, with input consisting of a speech signal contaminated by interference. Interference suppression is based on the characteristics of the useful signal and the interference. These systems are simpler and less costly than multi-channel methods. They assume that the useful signal (speech) and background interference have different characteristics. They use the calculation of the frequency spectrum from sub-segments of the signal. Their effectiveness is usually limited because of non-stationary interference. Methods include frequency selective filters of the finite impulse response (FIR) and infinite impulse response (IIR) type, methods based on Wiener filtering theory, spectral subtraction using the fast Fourier transform (FFT), wavelet transform (WT), and empirical modal decomposition (EMD) [77].
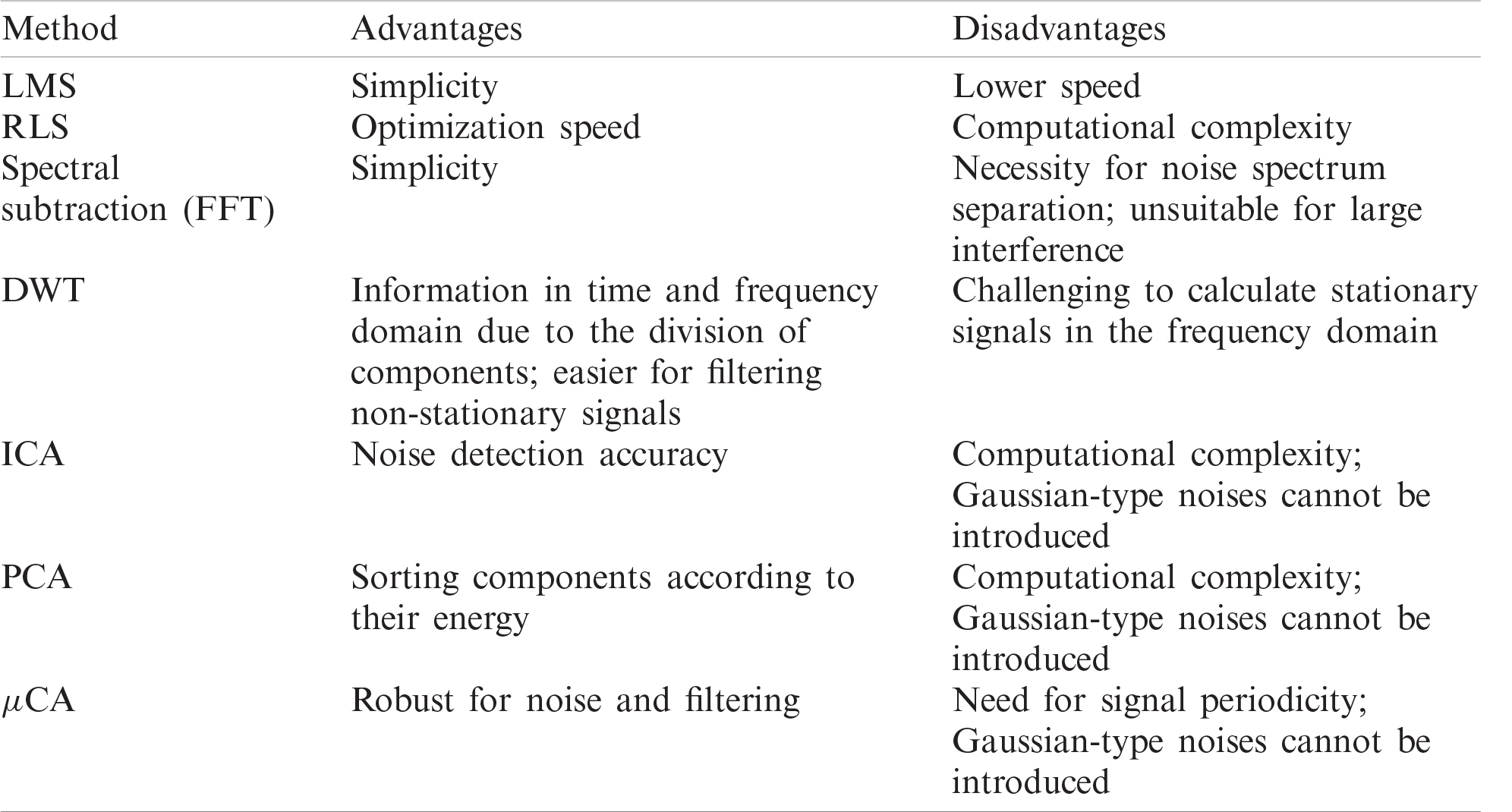
2.2 Comparison of Speech Signal Processing Methods
Tab. 1 shows the advantages and disadvantages of basic speech signal processing methods.
In 2010, Borisagar et al. [78] tested the adaptive LMS and RLS algorithms for real-time speech signal processing. Both achieved much higher accuracy in MATLAB simulations than a fixed filter designed by conventional methods. In addition, LMS has a simple structure and is easy to implement. Its main disadvantage is slower convergence, but it requires much less memory than RLS.
Wang et al. [79] introduced a method in 2011 based on spectral reading using a multi-channel LMS algorithm. They performed recognition experiments on a distorted speech signal simulated by convolution of multi-channel impulse responses with pure speech. The method’s error was 22.4% less than that of conventional cepstral mean normalization. When improved using beamforming, the error was 24.5% less than that of conventional cepstral mean normalization with beamforming. The test was focused on analysis of individual words with a duration of about 0.6 s.
In 2008, Cole et al. [63] applied different widths of the Hanning window and FFT signal conversion to the frequency domain to perform spectral readings using spectral subtraction, i.e., subtracting the noise spectrum from the spectrum of a speech signal contaminated with additive noise, assuming no correlation between the signals. The signal was further modified to form blocks called micro-segments. After conversion to the frequency domain, the interference component was removed by spectral subtraction and the signal was converted using an inverse FFT in the time domain. Testing used a speech signal with digitally added vacuum cleaner noise. Based on the SNR calculation, the best result was obtained using a Hanning window with a width of 256 points. However, the method can be considered inappropriate, as it is necessary to monitor the amount of input information. The method’s effectiveness depends on the determination of the noise spectrum, which is difficult in real conditions and unsuitable in a very noisy environment.
Table 1: Advantages and disadvantages of above methods for interference removal
In 2009, Mihov et al. [65] employed the WT to reduce speech signals contaminated by interference. Files from a test database containing 720 male voice recordings were sampled at 25 kHz. Noise was added to the speech signal with SNRs of 0, 5, 10, and 15 dB. Due to its computational complexity, sym3 and higher (Symlet wavelet) were unusable for interference reduction in real-time. The best properties were shown by db3 and db5 (Daubechies wavelets), with a maximum SNR improvement of 14 dB.
Aggarwal et al. [64] used the DWT algorithm in 2011 to reduce interference, applying both soft and hard thresholding. Analysis was carried out on a speech signal contaminated with noise at SNR levels of 0, 5, 10, and 15 dB. The soft thresholding method provided better results at all measured levels of SNR input, and the maximum performance improvement was 35.16 dB. The hard threshold reached a maximum improvement of 21.71 dB.
In 2003, Visser et al. [70] analyzed the efficiency of the ICA method in automobiles. Driving at 40 km/h, the driver spoke a sequence of numbers while the passenger spoke on a mobile phone and the radio and heater were turned on. Stereo microphones on either side of the rearview mirror (15 cm apart) were used for recording, and recorded data were sampled at 8 kHz. The SNR of the mixture recorded by the microphone on the driver’s side ranged from 2 to 5 dB. The recognition success rate was 46.9% before applying ICA separation. After using ICA, the success rate increased to 72.8%. The best results were achieved by a combination of the ICA and WT methods, where the recognition success rate was 79.6%. In the same year, Visser et al. [71] examined the effectiveness of the ICA in a room (3 × 4 × 6 m) with two directional microphones placed 10 cm apart. Speakers placed in the four corners of the room generated spatially distributed noise. Two other speakers were placed 30 cm from the microphones. The first speaker transmitted a sequence of numbers, and the second transmitted interference consisting of prerecorded words. The SNRs of the mixtures recorded by the microphone were in the range of 5, 0, 5, and 10 dB. The recognition success rate was up to 49.34%, and this was improved to 84.89% through the ICA method.
In 2010, Kandpal et al. [80] used the PCA algorithm for both speech recognition and speech separation. A recording of seven voices, which was 2 s long, with a sampling frequency of 8 kHz, was used for analysis. Based on the correlation coefficient, they evaluated the output of the PCA method against these seven voices and concluded that the probability of a match between the PCA output and the voices was around 0.8.
In 2001, Saul et al. [81] developed the μCA method for speech recognition. The algorithm had four phases. First, they used the eigenvalue method to combine and amplify weak periodic signals. They used a Hilbert transform to adjust the phase changes across the channels. They used effective sinus seizures to measure the periodicity. They performed a hierarchical analysis of the information through different frequency bands. The experiment was performed on synthetic data at a sampling frequency of 8 kHz. They showed that the μCA method enabled extraction of the required signal segment from different parts of the frequency spectrum, and that the method is also effective on signals with an SNR input of 20 dB. They mentioned that the μCA method is quite resistant to noise and filtering.
3 Applied Mathematical Methods
Based on the above studies that use advanced signal processing methods for speech filtering, the ICA method combined with an adaptive LMS algorithm was selected for interference suppression. A thorough study of the literature indicates that these methods provide promising results in various applications. We describe the selected methods below.
3.1 Independent Component Analysis
The independent component (ICA) method is a possible solution to the “cocktail-party problem,” as it can detect hidden factors that are the bases of groups of random variables, measurements, or signals. It is a multi-channel method, where two or more signals are converted to its input. The ICA is often used for analysis of a highly variable data from a large sample database. The variables are considered as linear mixtures of some unknown hidden variables, with no known mixing system. Hidden variables are considered to be non-Gaussian and independent, so they are called independent components of the observed data. Also called sources or factors, they can be found by ICA. Before applying this method, data preprocessing is necessary using centering (creating a vector with zero mean value) and whitening (creating uncorrelated data with unit variance). Eq. (1) represents the measured signals using microphones, where the matrix represents the mixing matrix
An algorithm derived from ICA, called FastICA, is often used to solve such problems. It has four steps. A random vector
The LMS algorithm is currently one of the most widely used adaptive algorithms. Its main strength lies in its mathematical simplicity. Adaptive algorithms are in general used in unknown environments because they can adjust their coefficients based on varying circumstances. They are based on a gradient search algorithm, or maximum gradient method. The dependence of the standard deviation of the output error signal of the adaptive FIR filter on the filter coefficients is a quadratic curve with one global minimum. The basis of the adaptive algorithm is the calculation of the error function
These algorithms require fewer demanding mathematical operations than RLS algorithms. Furthermore, they are one order less in complexity, and are therefore faster. The main disadvantage of LMS is its lower performance in time-varying environments and lower convergence speed [67,69,70,78].
Five experiments were conducted in laboratory or real conditions to verify the above technologies. Five scenarios were evaluated by software-based simulations. The interference models were combined with audio recordings of individual commands to test speech processing methods in different conditions.
The measuring equipment consisted of a professional Steinberg UR44 sound card and four connected Rode NT5 microphones. The devices were controlled by a PC via virtual instrumentation-based software.
The Steinberg UR44 professional sound card [83] is primarily used for music and audio. It has four inputs for microphones or musical instruments. It supports various communication standards of the audio industry, e.g., ASIO, WDM, and Core Audio. Standardized values of sampling frequencies in the range of 44.1 to 192 kHz can be selected, with a resolution up to 24 bits. The sound card supports the supply of phantom power for connected microphones, from +24 to +48 VDC.
The Rode NT5 microphone [84] is a compact device that can be connected via an XLR connector. The 1/2” diaphragm consists of an externally deflected capacitor. The membrane is gold-plated, which improves its properties. The microphone has cardioid directional characteristics, and a frequency range of 20 Hz and 20 kHz (corresponding to the range of human hearing). The microphone must be connected to the input of a sound card supporting phantom power.
Connectivity with the Steinberg UR44 sound card was maintained by the Audio Stream Input/Output (ASIO) audio communication standard. The LabVIEW graphical environment was chosen as the programming environment due to its high modularity and availability of usable libraries, including ASIO API, which is part of the WaveIO library [85].
The software was required to be as modular as possible, so that it could be used in various experiments and scenarios with minimal modification. The application was therefore designed in accordance with the queued message handler (QMH) design pattern [86]. The chosen architecture allows the consideration of each microphone as a separate measuring unit, eliminating the need to make large code changes when expanding the application.
A commercially available recognizer integrated into the Windows operating system was chosen as the speech signal recognizer. To enable its communication with LabVIEW required the installation of Speech SDK 5.1. The recognizer converted voice commands to text, which could then be used for either synthesis or further processing of the speech signal. A disadvantage is the limited database of languages (e.g., English, Chinese, French, and German), where local unexpanded languages (e.g., Czech and Slovak) are not supported. It was therefore necessary to set the Windows environment to a supported language. LabVIEW can be obtained through the freely available Speech Recognition Engine library. A conceptual diagram of the speech recognizer system can be seen in Fig. 1.
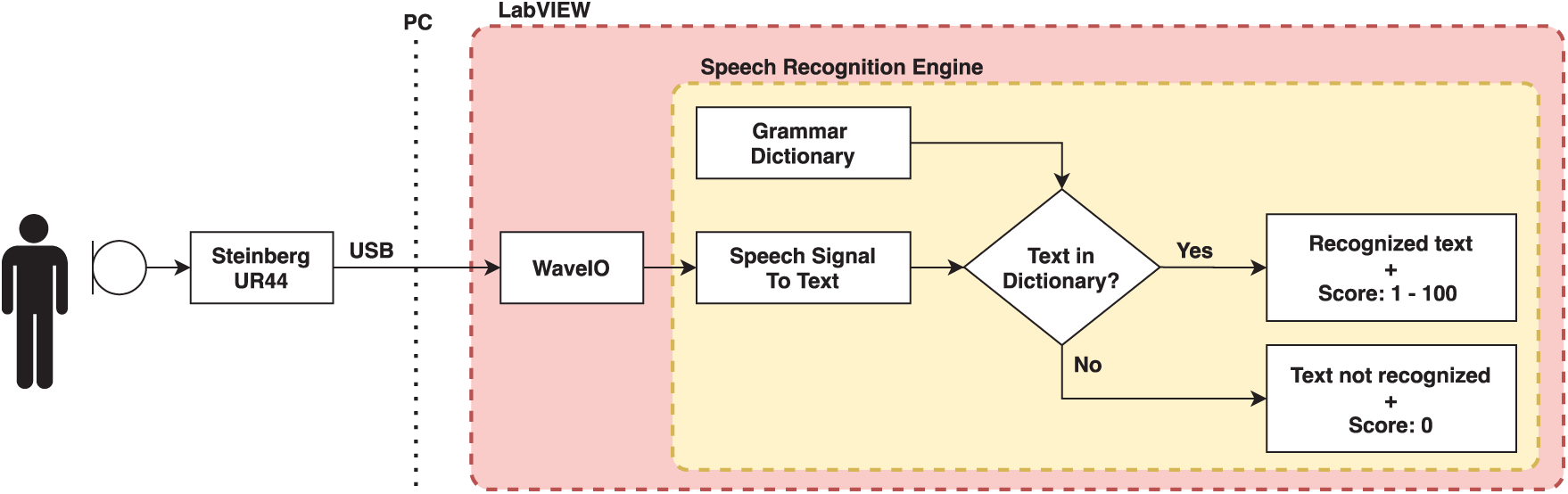
Figure 1: Concept diagram of speech recognizer system implemented in Windows
To have a speech signal modified by adaptive filtering before transmission to the recognizer, it is necessary to adjust the routing of the signal. Since the integrated Windows speech recognizer runs in the background of the operating system as a service, it is not possible for users to choose anything other than the input (such as LabVIEW or speech recording). The signal routing can be adjusted using SW (in our case, the VB-Cable [87]), which emulates both inputs and outputs of the sound card. The adjustment can be seen in the block diagram in Fig. 2.
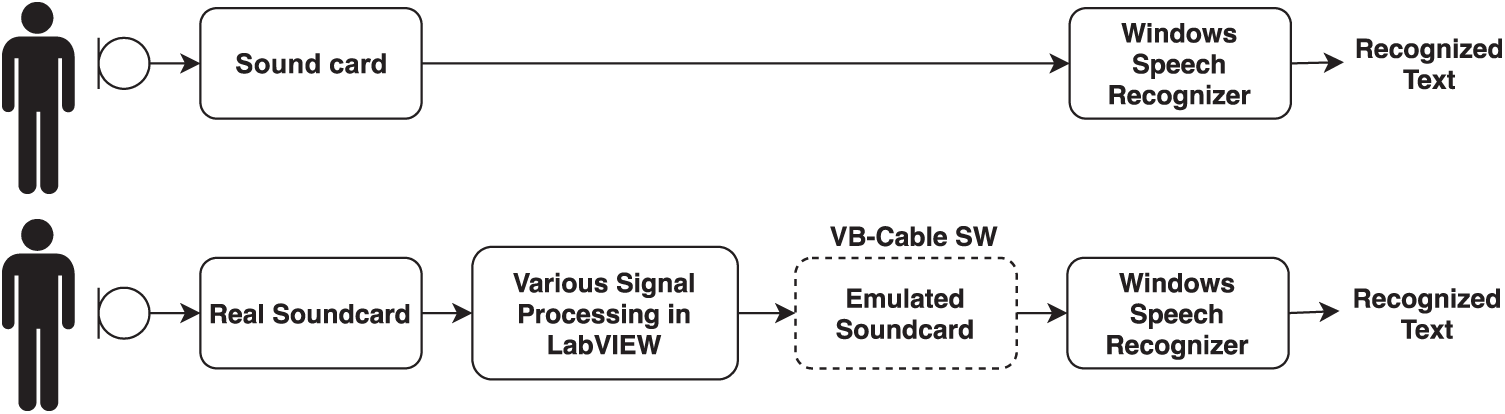
Figure 2: Principle of signal routing adjustments
4.3 Measurements of Interference Signals During Production Line Operation
The measurements were taken at Brose CZ spol. s.r.o. (Koprivnice, Czech Republic), which produces seat structures, electric motors, drives, and locks for rear and side doors of vehicles. Interference sources of the laser welder, magnetic welder, and press were measured. The primary microphone (index 0) was in the area where the operator directly operated the devices. The reference microphones (index 2 and 3) were on the sides of the device, and the reference microphone with index 1 was placed in back of the device (see Fig. 3).
As mentioned above, the ICA method and adaptive LMS method were chosen for noise suppression.
4.3.1 Setting up the LMS Algorithm
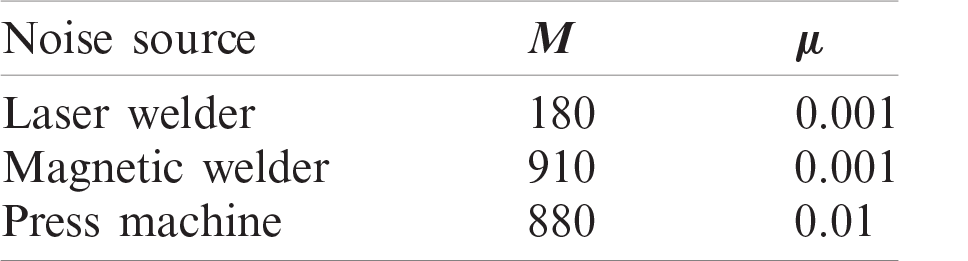
Offline identification was necessary since it was impossible to determine the exact command chains in advance. This was performed by gathering the ideal values for each voice command and interference selection in accordance with the global SNR. Based on the measured values, the best filter length
From Tab. 2 it is clearly seen that the higher the interference energy the greater the requirements for the adaptive filter, i.e., the greater the filter length
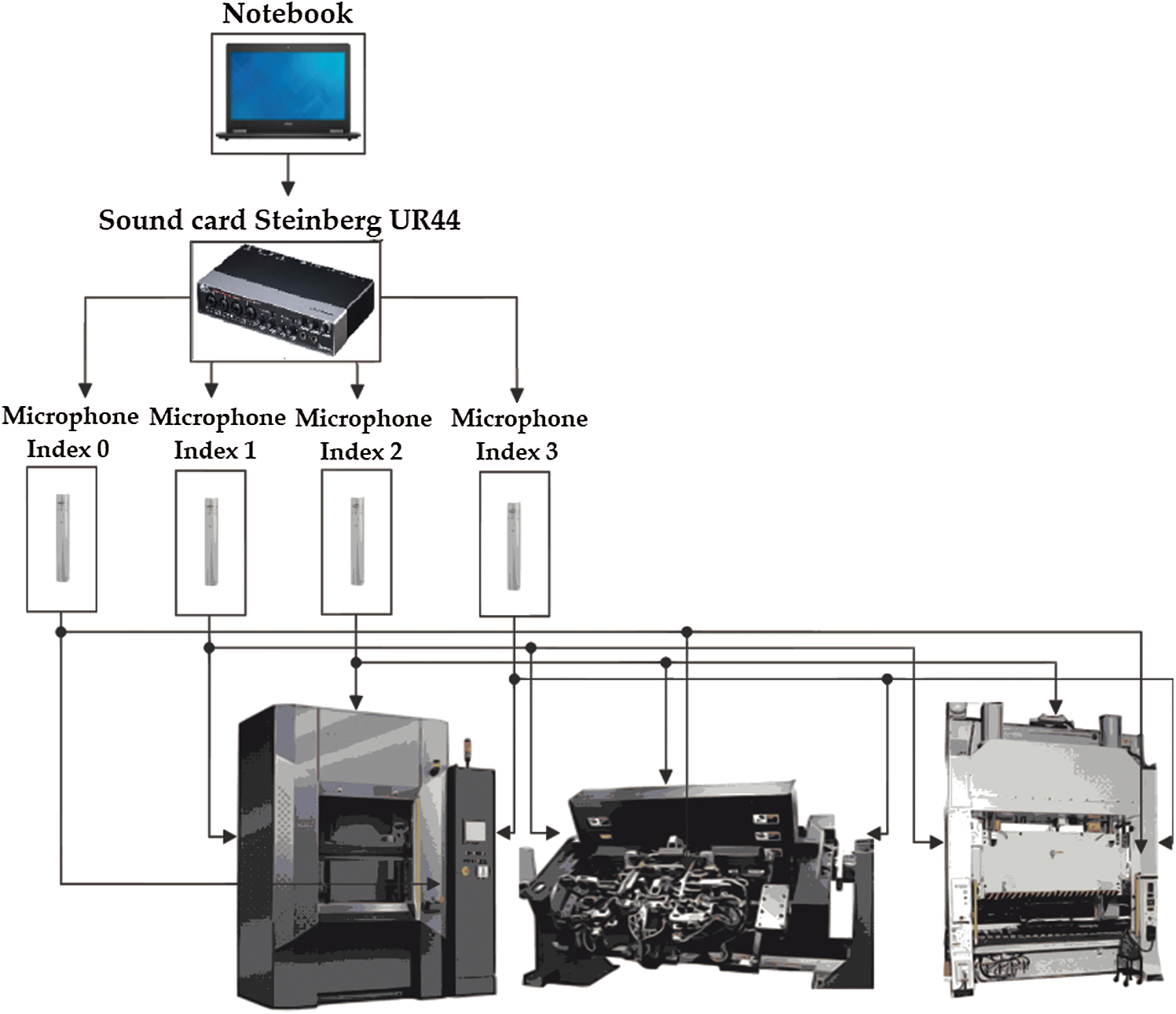
Figure 3: Implemented measurement system in production line

Figure 4: Measurement filtering chain using LMS algorithm
Table 2: Optimal parameter settings for LMS algorithm: production line visualization
4.3.2 Independent Component Analysis
The presented study relied on hybrid filtering, and FastICA with two independent components on the output of the adaptive filter. The convergence constant was set to
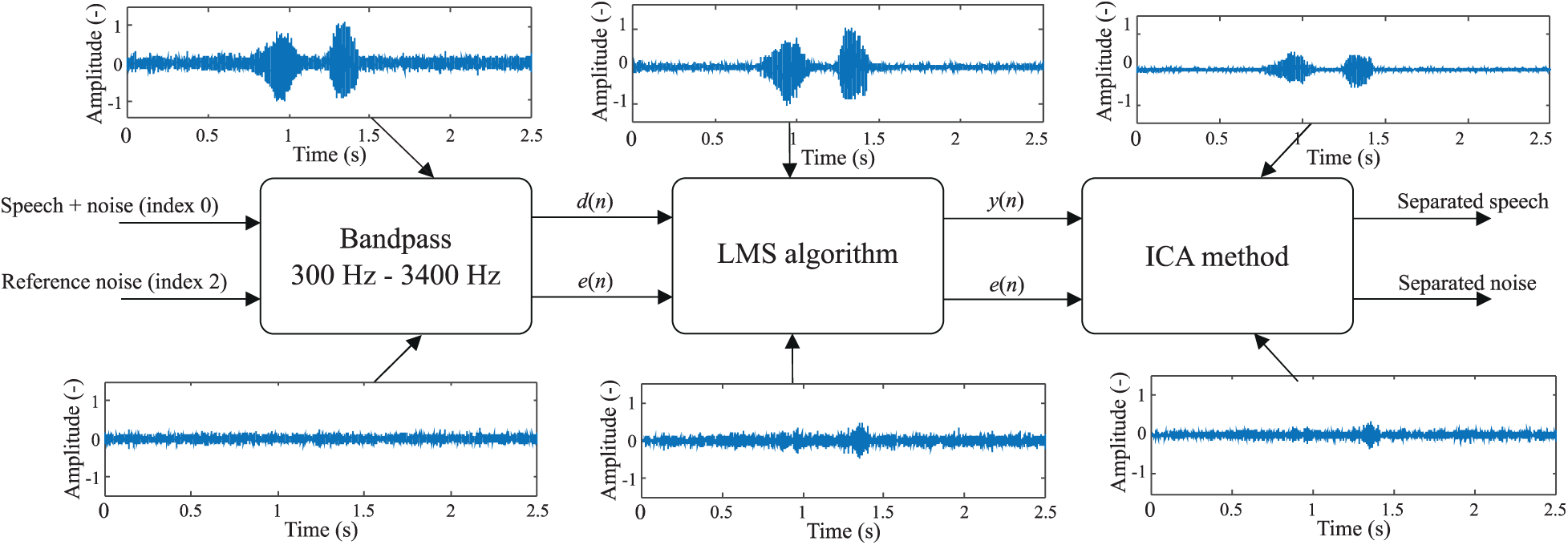
Figure 5: Measurement chain consisting of LMS and ICA hybrid algorithm system
4.3.3 Recognition Success Rate
The recognition success rate was estimated based on the recognized/unrecognized status. One hundred repetitions were performed. During testing, the microphone had to be close to the mouth, mainly due to interference caused by the press. As a result, the sound card cut off the signal in some locations when the maximum resolution was exceeded.
From Tab. 3 and Fig. 6, it can be seen that when the laser welder was measured, the average success rate before filtering was 27%. Two commands, “turn on the middle arm” and “turn on the left arm,” were not recognized at all. After filtering, the average success rate of the LMS algorithm and ICA method were 76% and 79%, respectively. The average success rate of the magnetic welder was 24% before filtering, the least successful recognition being for the “turn on the left arm” command. After application of the filtering algorithms, the average success rates for the LMS method and ICA were 70% and 75%, respectively. While the LMS + ICA combination worked well in most scenarios, there were some exceptions. For example, the command “turn off the laser welder” achieved better results using only the LMS algorithm, and the signal deteriorated by up to 30% when the hybrid algorithm was used. The results from the press machine clearly show that the system was not able to distinguish the commands without LMS or hybrid algorithms. The interference energy was so high that it was necessary to place the microphone right next to the mouth to amplify the useful signal. Nevertheless, the average success rate after using the LMS algorithm was 52%, while the ICA method achieved 54%. This is an extreme scenario where the robustness of both methods was tested.
Table 3: Order recognition success for different types of production lines
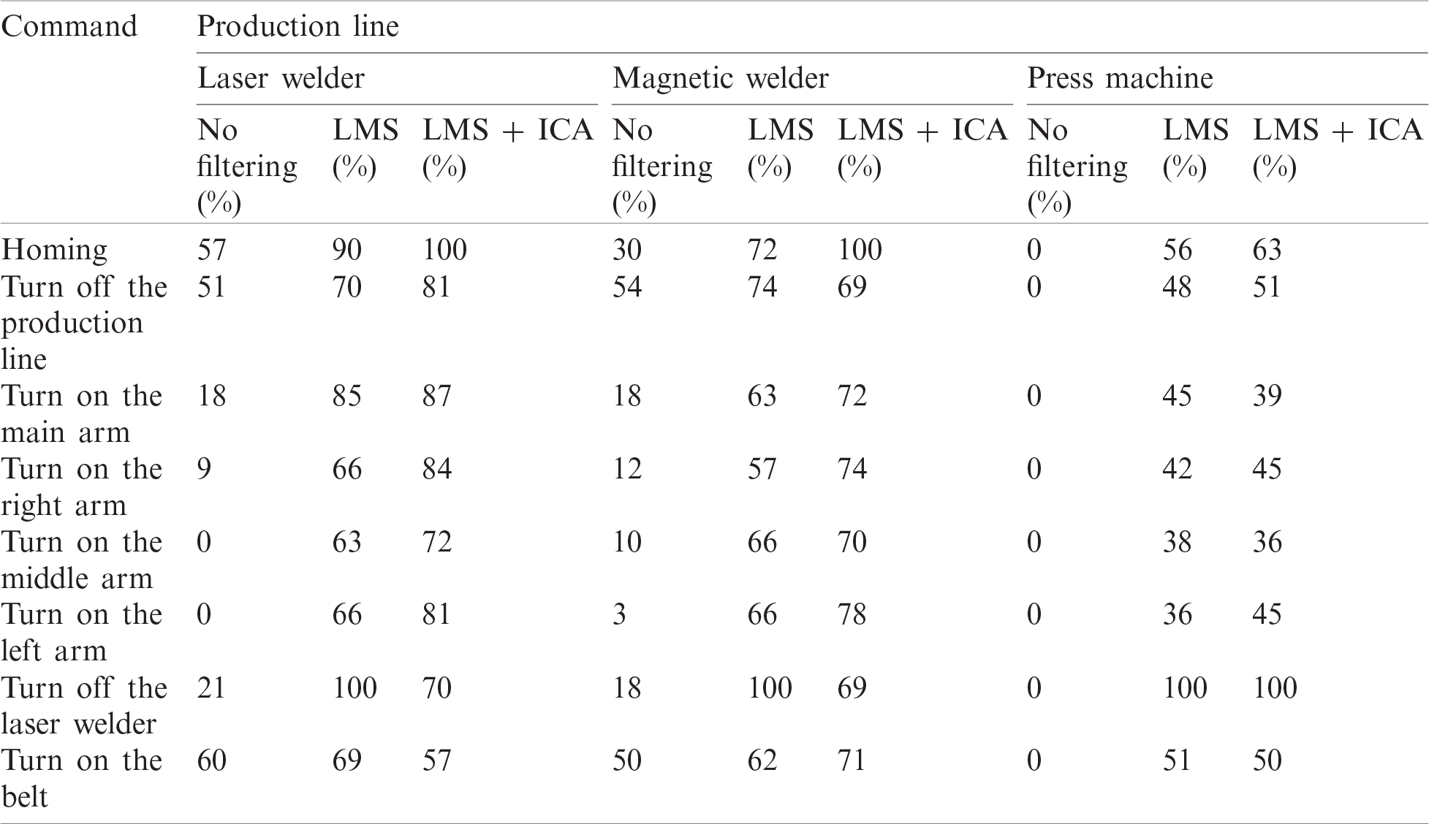
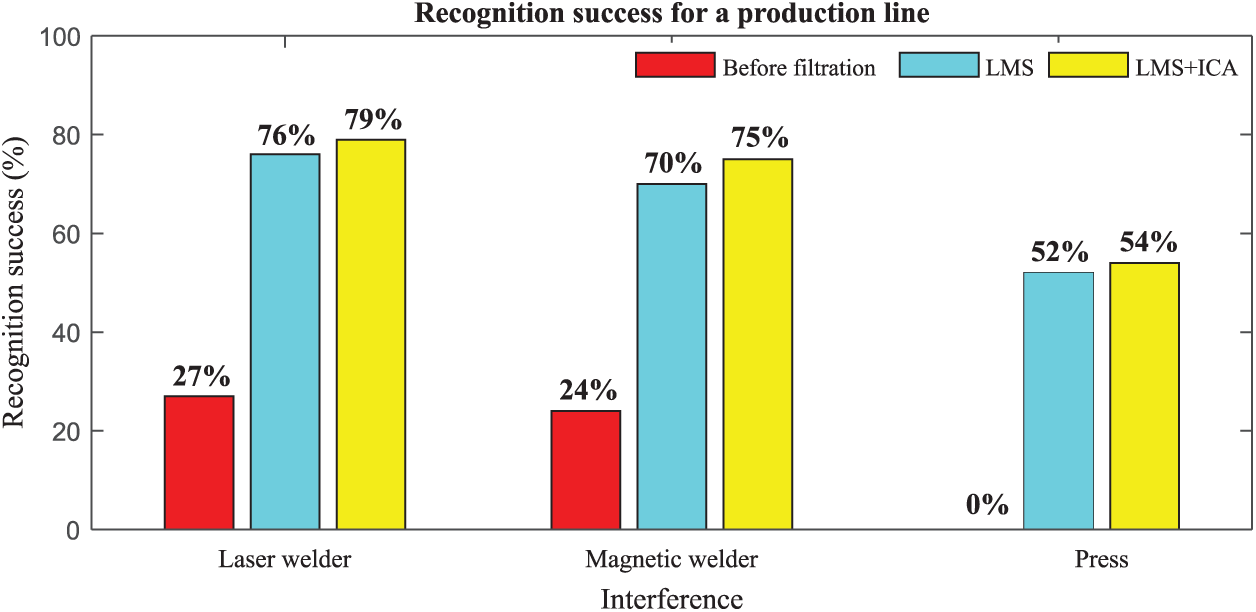
Figure 6: Average recognition success rates
From the spectrograms (Figs. 7–9) it can be noticed that the filtered signals from both welders have very similar waveforms. Both scenarios reached better success rates when employing the LMS and ICA combination. This is because the ICA method normalizes the signal to half the input signal, thus reducing the high values of interfering signals.
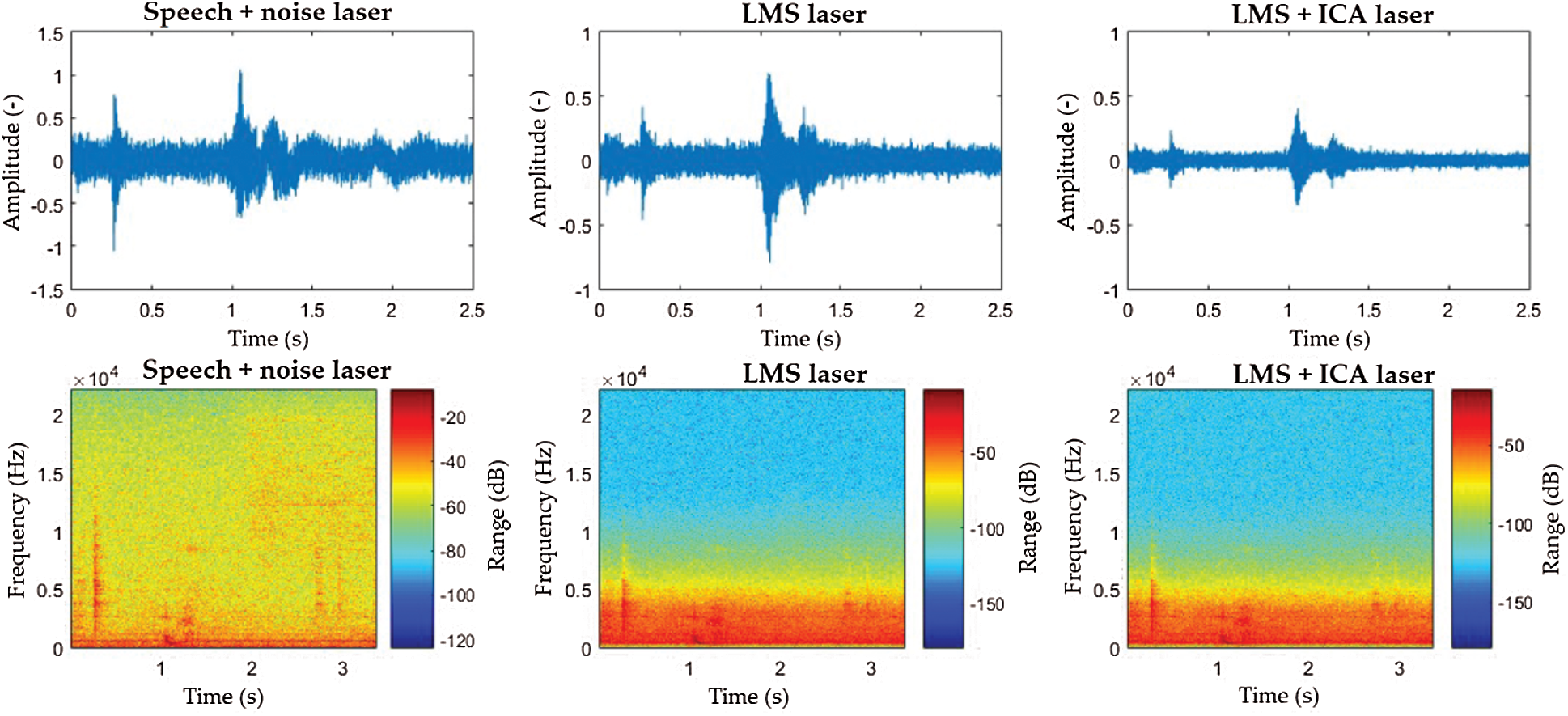
Figure 7: Laser welding machine interference spectrograms: “Homing” command
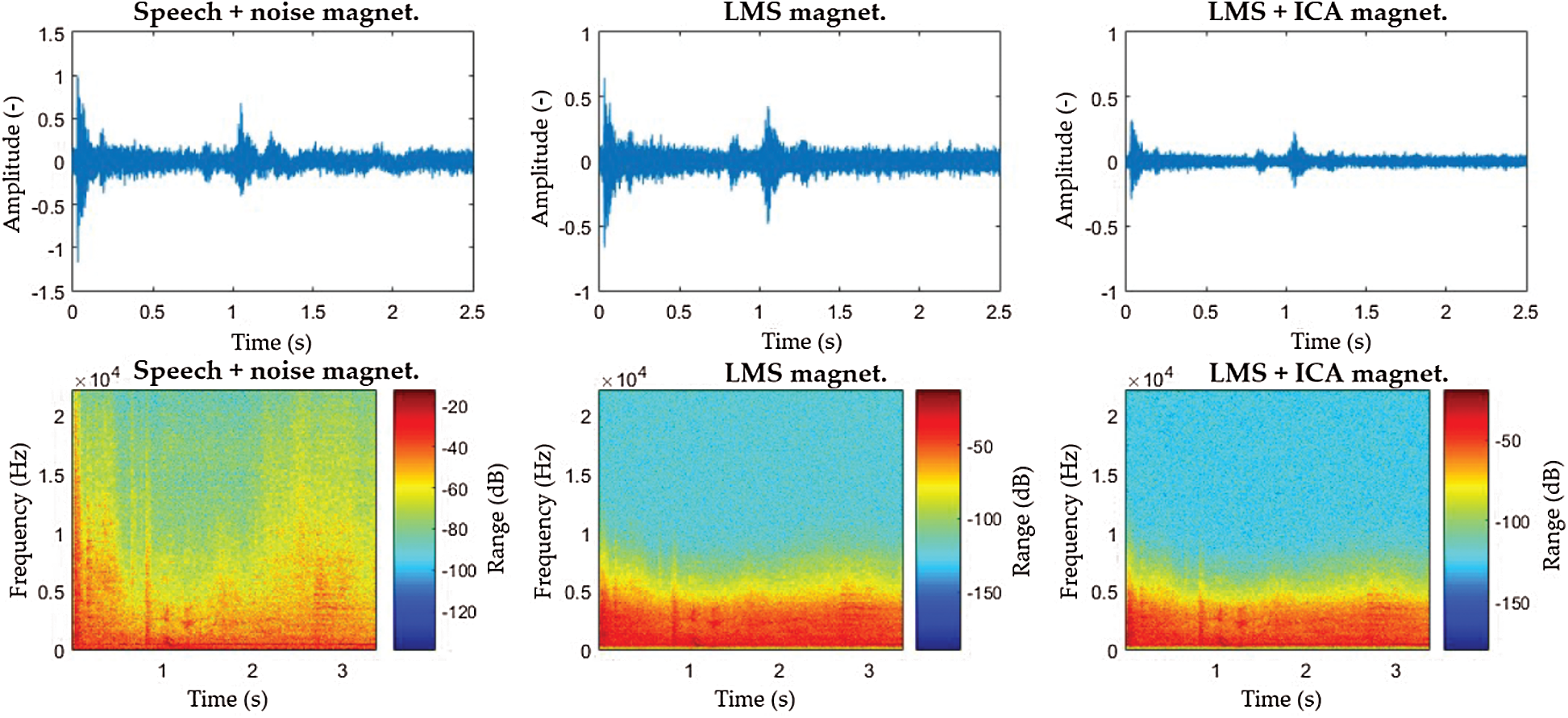
Figure 8: Magnetic welder interference spectrograms: “Homing” command
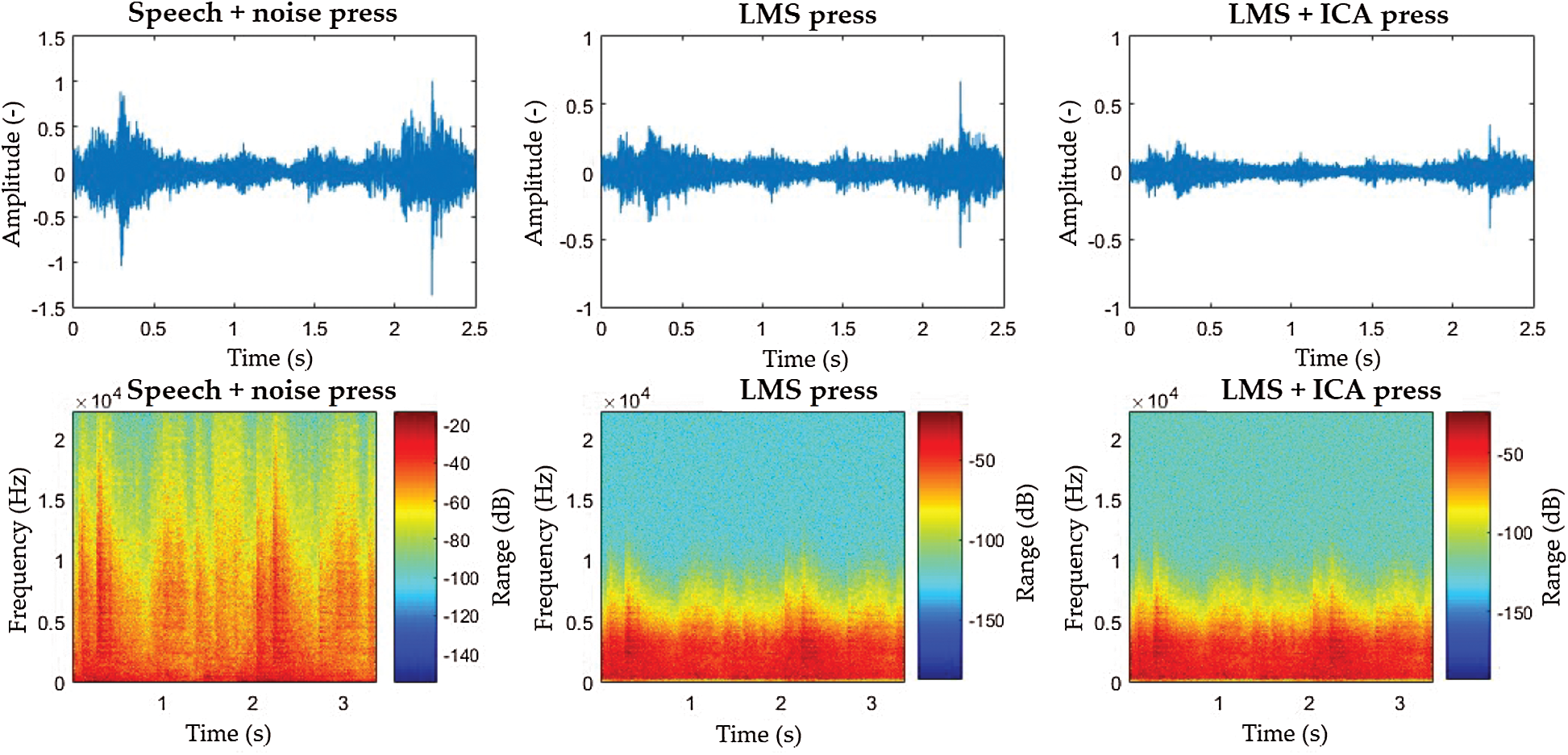
Figure 9: Press machine interference spectrograms: “Homing” command
The proposed concept of interference reduction can be applied in other industrial areas. The so-called acoustic/mechanical analysis of production, which is part of the predictive maintenance concept, seems to be a promising approach. In cooperation with our industrial partner, Brose CZ spol. s.r.o., some pilot experiments were carried out on laser and magnetic welders, focusing on an acoustic analysis of welding quality (Fig. 10). The experiments focused on acoustic and mechanical analysis of a specific tool, as seen in Figs. 11 and 12. To carry out a reliable acoustic analysis requires the complete elimination of background noise, since it significantly influences the results. The presented early designs seem like an optimal tradeoff between costs and results, and will be the subject of further research.
The presented system can be used in other environments. Workers such as construction personnel, designers, artists, police, and fire fighters can leverage the power of direct voice commands in environments obstructed by noise. The presented algorithms are fully transferable and can be deployed for other uses. Noise reduction can be used in automobiles (to filter vehicular noise), construction (to filter background noise), or even in medicine (to filter life signs of a mother and/or fetus). The system has the advantage that it does not obstruct the worker in any way. Other systems require direct contact with the employee’s body. These solutions are often obtrusive and could potentially influence workers’ capabilities, or even their safety. A wireless and unobtrusive approach mitigates these problems and increases employees’ comfort.
However, some deployment areas might require effective advanced signal processing methods. Apart from the tested LMS and ICA combination, adaptive methods include normalized LMS (NLMS), RLS, QR-decomposition-based RLS (QR-RLS), and fast transversal filtering (FTF). The resulting signal can also be enhanced by post-processing techniques such as the wavelet transform (WT), empirical mode decomposition (EMD), and ensembled EMD (EEMD). Our future research will seek the combination of the most suitable algorithms, and will also focus on advanced AI techniques.
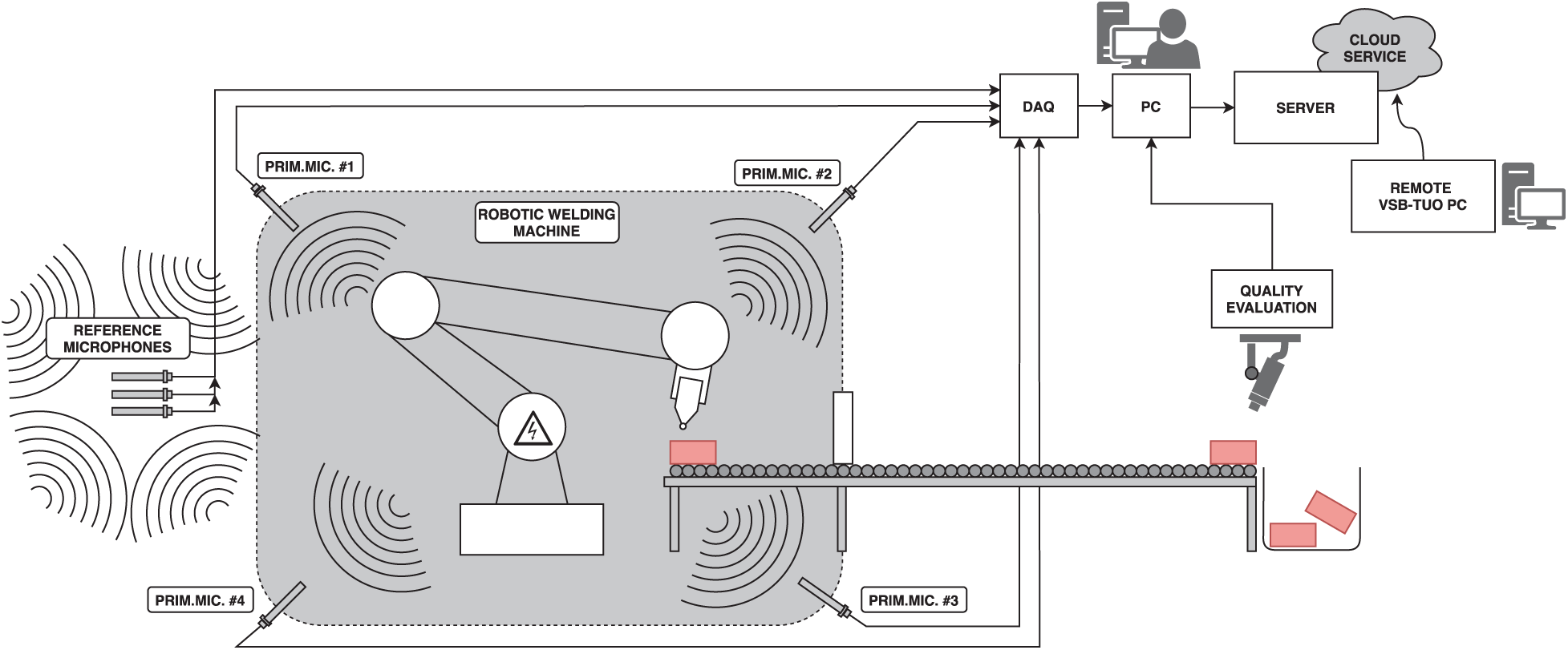
Figure 10: Acoustic analysis of welding process (detection of rejected products)
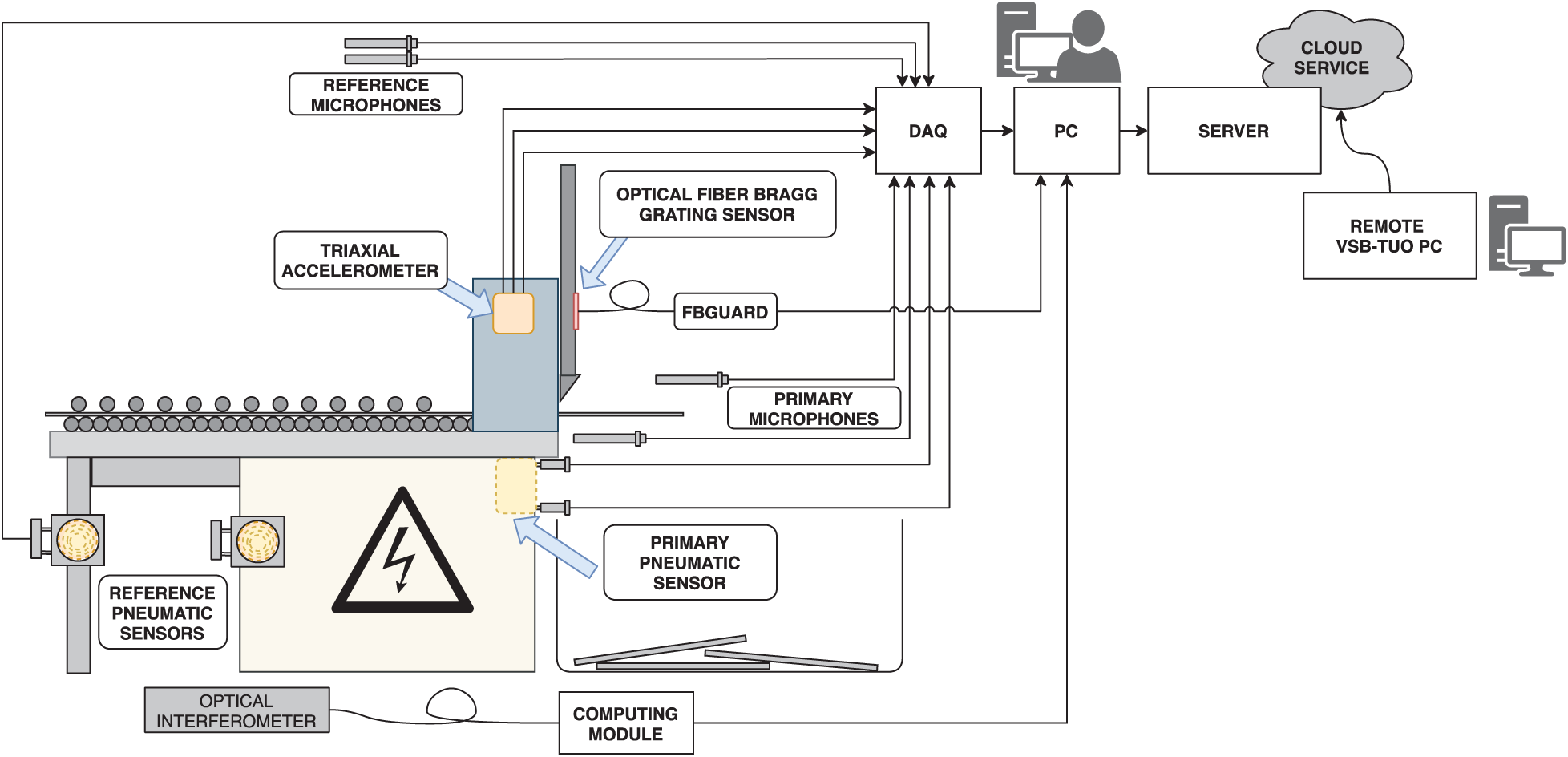
Figure 11: Long-term production line monitoring: cutting machine within press machine (use of artificial intelligence for predictive maintenance)

Figure 12: Collage from pilot measurements
Data in smart factories tend to differ greatly from regular IoT traffic, since they often contain higher amounts of data transferred over shorter periods of time. Manufacturing lines and machinery work at the best quality-time ratio and must maintain the highest effectivity possible. The machinery often contains a vast array of different commands, which report important data or influence precise manufacturing processes. It is therefore important to have a solution that offers higher transmit speeds [88] and the lowest possible latency [89], for which 5G is slowly surfacing as a candidate technology. The network is robust, operates in a licensed spectrum, has low latency, and is partially tailored for industrial deployment. Machine-to-machine (M2M) communication is a critical part of Industry 4.0, and is necessary to maintain coordination between various devices and components. Coordination can be maintained not only within a single plant but across plants. Synchronized machines offer a significant advantage in precise manufacturing processes, such as for automotive applications. Many teams are focused on requirements and challenges for wireless technologies in Industry 4.0. Most machines are currently wired. However, wires can obstruct machine movements, which can lead to malfunction or reject manufacturing. The industry is slowly shifting toward wireless technologies and there are certain necessary requirements needed for seamless transition. Varghese et al. [90] focused on these challenges, focusing on design criteria of latency, longevity, and reliability. The team benchmarked both WiFi and 5G in terms of latency and reliability parameters. Based on their information, a single wireless standard will not address all of the strict requirements of Industry 4.0; however, it too early to reject some technologies, since many are still undergoing revision. Ordonez-Lucena et al. [91] analyzed the newest 3GPP Release 16 specification of 5G and identified a number of deployment options relevant to non-public networks. Their work included a feasibility analysis covering technical, regulatory, and business aspects. They also discussed business models and regulatory aspects.
Based on this information, the presented speech recognition system could be integrated as a part of a 5G Industry 4.0 automated factory. The early concept is shown in Fig. 13. The system could employ an array of wireless microphones to assist in speech recognition. Workers would carry their own reference microphones as a source of voice commands, influenced by background noise. Arrays deployed on machinery could be used as a source of noise. The gathered data would be automatically evaluated on a local server based on various qualitative parameters. Due to the low latency of 5G networks, evaluation and interaction could be seamless. The machinery could therefore be operated by reliable and well-recognized voice commands, increasing workflow and safety. The local non-public network (NPN) can parse relevant data gathered from machines and evaluate advanced functions on auxiliary servers. The results could be distributed through public land mobile networks (PLMN) to other manufacturing plants.
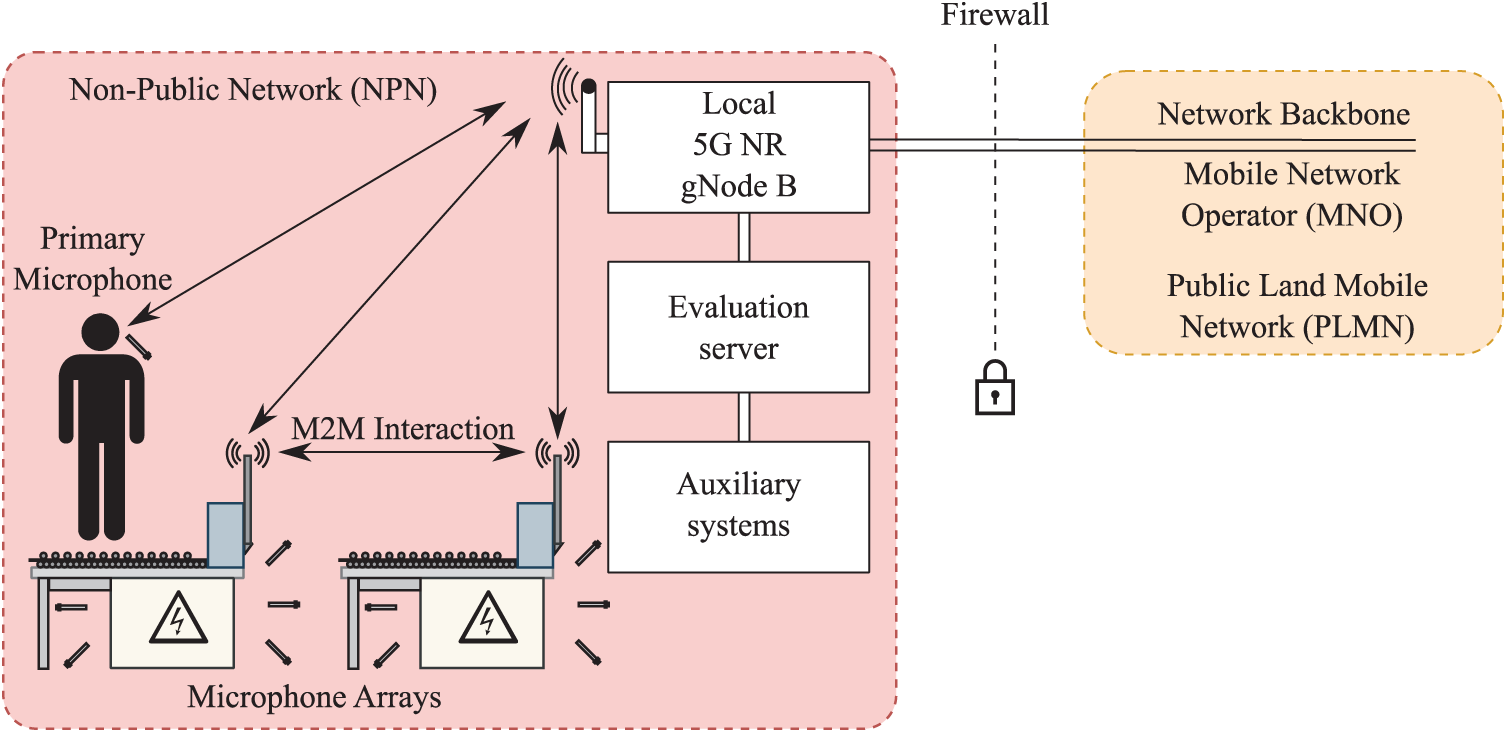
Figure 13: Concept of smart factory with 5G compatible voice evaluation platform
We presented innovative methods of speech signal processing for voice control of a production line in Industry 4.0. A commercially available Windows recognizer was used in order to recognize specific commands. The system was based on a commercially available sound card and LabVIEW programming environment. The analyzed data were gathered directly on the production line, making it possible to analyze a laser welder, magnetic welder, and press machine.
The linear adaptive filter LMS and the ICA method were chosen for environmental noise filtering. A dataset of 100 repetitions of each command was used to evaluate the designed system. A total of eight commands were tested in combination with three types of interference. The average recognition success before and after filtering was up to 49% higher in case of the LMS algorithm, and up to 52.3% for the hybrid filtering scenarios.
The overall results showed that the hybrid method had a 5% advantage over a conventional LMS algorithm. However, due to the computational complexity of the ICA method, it is significantly better to implement the LMS algorithm, which is much simpler and offers similar results. As the performance and price of available technology change rapidly, many more powerful algorithms might surface in the coming years.
Acknowledgement: This work was supported by the European Regional Development Fund in Research Platform focused on Industry 4.0 and Robotics in Ostrava project CZ.02.1.01/0.0/0.0/17_049/0008425 within the Operational Programme Research, Development and Education, and in part by the Ministry of Education of the Czech Republic under Project SP2021/32 and SP2021/45.
Funding Statement: This work was supported by the European Regional Development Fund in Research Platform focused on Industry 4.0 and Robotics in Ostrava project CZ.02.1.01/0.0/0.0/17_049/0008425 within the Operational Programme Research, Development and Education, Project Nos. SP2021/32 and SP2021/45.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. S. D. Goldinger, “Words and voices: Episodic traces in spoken word identification and recognition memory,” Journal of Experimental Psychology: Learning, Memory, and Cognition, vol. 22, no. 5, pp. 1166–1183, 1996. [Google Scholar]
2. K. Hendrickson, J. Spinelli and E. Walker, “Cognitive processes underlying spoken word recognition during soft speech,” Cognition, vol. 198, no. 4, pp. 1–15, 2020. [Google Scholar]
3. S. Elavarasi and G. Suseendran, “Automatic robot processing using speech recognition system,” in Data Management, Analytics and Innovation, 1st ed., vol. 2. Singapore: Springer, pp. 185–195, 2020. [Google Scholar]
4. T. Zoughi, M. M. Homayounpour and M. Deypir, “Adaptive windows multiple deep residual networks for speech recognition,” Expert Systems with Applications, vol. 139, no. 10, pp. 1–16, 2020. [Google Scholar]
5. R. Dotihal, A. Sopori, A. Muku, N. Deochake and D. Varpe, “Smart homes using alexa and power line communication in IoT,” in Int. Conf. on Computer Networks and Communication Technologies, 1st ed., vol. 15. Singapore: Springer, pp. 241–248, 2019. [Google Scholar]
6. A. P. Naik and P. Abraham, “Arduino based voice controlled robotic arm,” Robotics, vol. 1, pp. 1–8, 2020. [Google Scholar]
7. S. He, A. Zhang and M. Yan, “Voice and motion-based control system: Proof-of-concept implementation on robotics via internet-of-things technologies,” in Proc. of the 2019 ACM Southeast Conf., Kennesaw, GA, USA, pp. 102–108, 2019. [Google Scholar]
8. N. J. Knight, S. Kanza, D. Cruickshank, W. S. Brocklesby and J. G. Frey, “Talk2Lab: The smart lab of the future,” IEEE Internet of Things Journal, vol. 7, no. 9, pp. 8631–8640, 2020. [Google Scholar]
9. S. Kennedy, H. Li, C. Wang, H. Liu, B. Wang et al., “I can hear your alexa: Voice command fingerprinting on smart home speakers,” in IEEE Conf. on Communications and Network Security, Washington, DC, USA, pp. 232–240, 2019. [Google Scholar]
10. J. Vajpai and A. Bora, “Industrial applications of automatic speech recognition systems,” International Journal of Engineering Research and Applications, vol. 6, no. 3, pp. 88–95, 2016. [Google Scholar]
11. K. Koumpis and K. Pavitt, “Corporate activities in speech recognition and natural language: Another “new science”-based technology,” International Journal of Innovation Management, vol. 3, no. 3, pp. 335–366, 1999. [Google Scholar]
12. J. Mocnej, T. Lojka and I. Zolotová, “Using information entropy in smart sensors for decentralized data acquisition architecture,” in IEEE 14th Int. Symp. on Applied Machine Intelligence and Informatics, Danvers, IEEE, pp. 47–50, 2016. [Google Scholar]
13. S. Amrutha, S. Aravind, A. Mathew, S. Sugathan, R. Rajasree et al., “Voice controlled smart home,” International Journal of Emerging Technology and Advanced Engineering, vol. 5, no. 1, pp. 272–275, 2015. [Google Scholar]
14. R. Martinek, J. Vanus, J. Nedoma, M. Fridrich, J. Frnda et al., “Voice communication in noisy environments in a smart house using hybrid LMS + ICA algorithm,” Sensors, vol. 20, no. 21, pp. 1–24, 2020. [Google Scholar]
15. H. Kamdar, R. Karkera, A. Khanna, P. Kulkarni and S. Agrawal, “A review on home automation using voice recognition,” International Research Journal of Engineering and Technology, vol. 4, no. 10, pp. 1795–1799, 2017. [Google Scholar]
16. R. Kango, P. Moore and J. Pu, “Networked smart home appliances-enabling real ubiquitous culture,” in Proc. 3rd IEEE Int. Workshop on System-on-Chip for Real-Time Applications, Liverpool, UK, pp. 76–80, 2002. [Google Scholar]
17. I. Zolotová, P. Papcun, E. Kajáti, M. Miškuf and J. Mocnej, “Smart and cognitive solutions for operator 4.0: Laboratory H-CPPS case studies,” Computers & Industrial Engineering, vol. 139, no. 105471, pp. 1–15, 2020. [Google Scholar]
18. I. V. McLoughlin and H. R. Sharifzadeh, “Speech recognition for smart homes, Speech Recognition,” Technologies and Applications, vol. 2008, pp. 477–494, 2008. [Google Scholar]
19. L. R. Rabiner, “Applications of voice processing to telecommunications,” Proceedings of the IEEE, vol. 82, no. 2, pp. 199–228, 1994. [Google Scholar]
20. D. Yu and L. Deng, Automatic Speech Recognition, 1st ed., London, UK: Springer, pp. 1–321, 2016. [Google Scholar]
21. T. Obaid, H. Rashed, A. A. El Nour, M. Rehan, M. M. Saleh et al., “ZigBee based voice controlled wireless smart home system,” International Journal of Wireless & Mobile Networks, vol. 6, no. 1, pp. 47–59, 2014. [Google Scholar]
22. D. S. Thakur and A. Sharma, “Voice recognition wireless home automation system based on Zigbee,” IOSR Journal of Electronics and Communication Engineering, vol. 6, no. 1, pp. 65–75, 2013. [Google Scholar]
23. D. W. Beeks and R. Collins, Speech Recognition and Synthesis, 2nd ed., London, UK: CRC Press, pp. 1–316, 2001. [Google Scholar]
24. H. Chevalier, C. Ingold, C. Kunz, C. Moore, C. Roven et al., “Large-vocabulary speech recognition in specialized domains,” in Int. Conf. on Acoustics, Speech, and Signal Processing, Detroit, MI, USA, pp. 217–220, 1995. [Google Scholar]
25. C. A. Kamm, C. Shamieh and S. Singhal, “Speech recognition issues for directory assistance applications,” Speech Communication, vol. 17, no. 3–4, pp. 303–311, 1995. [Google Scholar]
26. H. Sun, L. Shue and J. Chen, “Investigations into the relationship between measurable speech quality and speech recognition rate for telephony speech,” in IEEE Int. Conf. on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, pp. 865–868, 2004. [Google Scholar]
27. M. K. Ravishankar, “Efficient algorithms for speech recognition,” Ph.D. dissertation, Carnegie Mellon University, Pittsburgh, 1996. [Google Scholar]
28. A. Rogowski, “Industrially oriented voice control system,” Robotics and Computer-Integrated Manufacturing, vol. 28, no. 3, pp. 303–315, 2012. [Google Scholar]
29. C. Spitzer, U. Ferrell and T. Ferrell, Digital Avionics Handbook, 3rd ed., London, UK: CRC press, pp. 1–848, 2017. [Google Scholar]
30. V. Marik, Průmysl 4.0-Výzva Pro Českou Republiku. Prague, Czechia: Management Press, 2016. [Google Scholar]
31. Cyber-Physical Systems. The Ptolemy project. 2021. [Online]. Available: http://cyberphysicalsystems.org/. [Google Scholar]
32. B. Mardiana, H. Hazura, S. Fauziyah, M. Zahariah, A. Hanim et al., “Homes appliances controlled using speech recognition in wireless network environment,” in Int. Conf. on Computer Technology and Development, Kota Kinabalu, Malaysia, pp. 285–288, 2009. [Google Scholar]
33. Smart Device. Techopedia. 2015. [Online]. Available: https://www.techopedia.com/definition/31463/ smart-device. [Google Scholar]
34. M. Schiefer, “Smart home definition and security threats,” in Ninth Int. Conf. on IT Security Incident Management & IT Forensics, Magdeburg, Germany, pp. 114–118, 2015. [Google Scholar]
35. O. Kyas, “How to smart home,” Tanggal Akses Terakhir, vol. 3, pp. 1–208, 2013. [Google Scholar]
36. J. Psutka, L. Muller, J. Matousek and V. Radova, Mluvíme s počítačem Česky, 1st ed., vol. 111. Prague, Czechia: Academia, pp. 1–746, 2006. [Google Scholar]
37. H. Sakoe and S. Chiba, “Dynamic programming algorithm optimization for spoken word recognition,” IEEE Transactions on Acoustics, Speech, and Signal Processing, vol. 26, no. 1, pp. 43–49, 1978. [Google Scholar]
38. R. E. Bellman and S. E. Dreyfus, Applied Dynamic Programming, 1st ed., Princeton, New Jersey, USA: Princeton University Press, pp. 1–390, 2015. [Google Scholar]
39. A. Kumar, M. Dua and T. Choudhary, “Continuous hindi speech recognition using monophone based acoustic modeling,” International Journal of Computer Applications, vol. 24, pp. 1–5, 2014. [Google Scholar]
40. S. J. Arora and R. P. Singh, “Automatic speech recognition: A review,” International Journal of Computer Applications, vol. 60, no. 9, pp. 34–44, 2012. [Google Scholar]
41. S. K. Saksamudre, P. Shrishrimal and R. Deshmukh, “A review on different approaches for speech recognition system,” International Journal of Computer Applications, vol. 115, no. 22, pp. 23–28, 2015. [Google Scholar]
42. H. Hermansky, “Perceptual linear predictive (PLP) analysis of speech,” Journal of the Acoustical Society of America, vol. 87, no. 4, pp. 1738–1752, 1990. [Google Scholar]
43. L. Xie and Z.-Q. Liu, “A comparative study of audio features for audio-to-visual conversion in mpeg-4 compliant facial animation,” in Int. Conf. on Machine Learning and Cybernetics, Dalian, China, pp. 4359–4364, 2006. [Google Scholar]
44. A. Garg and P. Sharma, “Survey on acoustic modeling and feature extraction for speech recognition,” in 3rd Int. Conf. on Computing for Sustainable Global Development (INDIAComNew Delhi, India, pp. 2291–2295, 2016. [Google Scholar]
45. J. Rajnoha and P. Pollak, “Detektory řečové aktivity na bázi perceptivní kepstrální analỳzy,” in České Vysoké učení Technické v Praze, Fakulta Elektrotechnická Prague, Czechia, pp. 1–9, 2008. [Google Scholar]
46. G. A. Saon and H. Soltau, “Method and system for joint training of hybrid neural networks for acoustic modeling in automatic speech recognition,” U.S. Patent No. 9,665,823, Washington, DC: U.S. Patent and Trademark Office, pp. 1–18, 2017. [Google Scholar]
47. J. I. Godino-Llorente, P. Gomez-Vilda and M. Blanco-Velasco, “Dimensionality reduction of a pathological voice quality assessment system based on Gaussian mixture models and short-term cepstral parameters,” IEEE Transactions on Biomedical Engineering, vol. 53, no. 10, pp. 1943–1953, 2006. [Google Scholar]
48. L.-S. A. Low, N. C. Maddage, M. Lech, L. Sheeber and N. Allen, “Content based clinical depression detection in adolescents,” in 17th European Signal Processing Conf., Glasgow, UK, pp. 2362–2366, 2009. [Google Scholar]
49. N. T. Hai, N. Van Thuyen, T. T. Mai and V. Van Toi, “MFCC-DTW algorithm for speech recognition in an intelligent wheelchair,” in 5th Int. Conf. on Biomedical Engineering in Vietnam, Ho Chi Minh City, Vietnam, pp. 417–421, 2015. [Google Scholar]
50. C. Ittichaichareon, S. Suksri and T. Yingthawornsuk, “Speech recognition using MFCC,” in Int. Conf. on Computer Graphics, Simulation and Modeling, Pattaya, Thailand, pp. 135–138, 2012. [Google Scholar]
51. J. Varak, “Možnosti hlasového ovládání bezpilotních dronŭ,” Bc. thesis, VSB-Technical University of Ostrava, Czechia, 2017. [Google Scholar]
52. M. Cutajar, E. Gatt, I. Grech, O. Casha and J. Micallef, “Comparative study of automatic speech recognition techniques,” IET Signal Processing, vol. 7, no. 1, pp. 25–46, 2013. [Google Scholar]
53. N. Jamal, S. Shanta, F. Mahmud and M. Sha’abani, “Automatic speech recognition (ASR) based approach for speech therapy of aphasic patients: A review,” in AIP Conf. Proc., Bydgoszcz, Poland, pp. 1–8, 2017. [Google Scholar]
54. S. Xue, O. Abdel-Hamid, H. Jiang, L. Dai and Q. Liu, “Fast adaptation of deep neural network based on discriminant codes for speech recognition,” IEEE/ACM Transactions on Audio, Speech, and Language Processing, vol. 22, no. 12, pp. 1713–1725, 2014. [Google Scholar]
55. P. Pujol, S. Pol, C. Nadeu, A. Hagen and H. Bourlard, “Comparison and combination of features in a hybrid HMM/MLP and a HMM/GMM speech recognition system,” IEEE Transactions on Speech and Audio Processing, vol. 13, no. 1, pp. 14–22, 2004. [Google Scholar]
56. E. Zarrouk, Y. B. Ayed and F. Gargouri, “Hybrid continuous speech recognition systems by HMM, MLP and SVM: A comparative study,” International Journal of Speech Technology, vol. 17, no. 3, pp. 223–233, 2014. [Google Scholar]
57. A. Chaudhari and S. Dhonde, “A review on speech enhancement techniques,” in Int. Conf. on Pervasive Computing, Pune, India, pp. 1–3, 2015. [Google Scholar]
58. N. Upadhyay and A. Karmakar, “Speech enhancement using spectral subtraction-type algorithms: A comparison and simulation study,” Procedia Computer Science, vol. 54, no. 2, pp. 574–584, 2015. [Google Scholar]
59. R. Martinek, “The use of complex adaptive methods of signal processing for refining the diagnostic quality of the abdominal fetal electrocardiogram,” Ph.D. dissertation, VSB-Technical University of Ostrava, Czechia, 2014. [Google Scholar]
60. J. Jan, Číslicová Filtrace, Analýza a Restaurace Signálů, 2nd ed., Brno, Czechia: Vutium, pp. 1–427, 2002. [Google Scholar]
61. P. Harding, “Model-based speech enhancement,” Ph.D. dissertation, University of East Anglia, UK, 2013. [Google Scholar]
62. P. C. Loizou, Speech Enhancement: Theory and Practice, 2nd ed., London, UK: CRC Press, pp. 1–711, 2013. [Google Scholar]
63. C. Cole, M. Karam and H. Aglan, “Increasing additive noise removal in speech processing using spectral subtraction,” in Fifth Int. Conf. on Information Technology: New Generations, Las Vegas, NV, USA, pp. 1146–1147, 2008. [Google Scholar]
64. R. Aggarwal, J. K. Singh, V. K. Gupta, S. Rathore, M. Tiwari et al., “Noise reduction of speech signal using wavelet transform with modified universal threshold,” International Journal of Computer Applications, vol. 20, no. 5, pp. 14–19, 2011. [Google Scholar]
65. S. G. Mihov, R. M. Ivanov and A. N. Popov, “Denoising speech signals by wavelet transform,” Annual Journal of Electronics, vol. 1, no. 6, pp. 2–5, 2009. [Google Scholar]
66. R. Martinek, J. Zidek, P. Bilik, J. Manas, J. Koziorek et al., “The Use of LMS and RLS adaptive algorithms for an adaptive control method of active power filter,” Energy and Power Engineering, vol. 5, no. 4, pp. 1126–1133, 2013. [Google Scholar]
67. B. Farhang-Boroujeny, Adaptive Filters: Theory and Applications, 2nd ed., Hoboken, New Jersey, USA: John Wiley & Sons, pp. 1–800, 2013. [Google Scholar]
68. S. V. Vaseghi, Advanced Digital Signal Processing and Noise Reduction, 4th ed., Hoboken, New Jersey, USA: John Wiley & Sons, pp. 1–544, 2009. [Google Scholar]
69. R. Martinek and J. Zidek, “The real implementation of NLMS channel equalizer into the system of software defined radio,” Advances in Electrical and Electronic Engineering, vol. 10, no. 5, pp. 330–336, 2012. [Google Scholar]
70. E. Visser, M. Otsuka and T.-W. Lee, “A spatio-temporal speech enhancement scheme for robust speech recognition in noisy environments,” Speech Communication, vol. 41, no. 2, pp. 393–407, 2003. [Google Scholar]
71. E. Visser and T.-W. Lee, “Speech enhancement using blind source separation and two-channel energy based speaker detection,” in IEEE Int. Conf. on Acoustics, Speech, and Signal Processing, Proc., Hong Kong, China, pp. 884–887, 2003. [Google Scholar]
72. A. Hyvärinen and E. Oja, “Independent component analysis: Algorithms and applications,” Neural Networks, vol. 13, no. 4, pp. 411–430, 2000. [Google Scholar]
73. A. Cichocki and S. Amari, Adaptive Blind Signal and Image Processing: Learning Algorithms and Applications, 1st ed., Hoboken, New Jersey, USA: John Wiley & Sons, pp. 1–586, 2002. [Google Scholar]
74. S. Fischer and K. U. Simmer, “Beamforming microphone arrays for speech acquisition in noisy environments,” Speech Communication, vol. 20, no. 3, pp. 215–227, 1996. [Google Scholar]
75. L. Griffiths and C. Jim, “An alternative approach to linearly constrained adaptive beamforming,” IEEE Transactions on Antennas and Propagation, vol. 30, no. 1, pp. 27–34, 1982. [Google Scholar]
76. Q. Zou, Z. L. Yu and Z. Lin, “A robust algorithm for linearly constrained adaptive beamforming,” IEEE Signal Processing Letters, vol. 11, no. 1, pp. 26–29, 2004. [Google Scholar]
77. A. Rajani and S. Soundarya, “A review on various speech enhancement techniques,” International Journal of Advanced Research in Computer and Communication Engineering, vol. 5, no. 8, pp. 296–301, 2016. [Google Scholar]
78. K. R. Borisagar and G. Kulkarni, “Simulation and comparative analysis of LMS and RLS algorithms using real time speech input signal,” Global Journal of Research in Engineering, vol. 10, no. 5, pp. 44–47, 2010. [Google Scholar]
79. L. Wang, N. Kitaoka and S. Nakagawa, “Distant-talking speech recognition based on spectral subtraction by multi-channel LMS algorithm,” IEICE Transactions on Information and Systems, vol. 94, no. 3, pp. 659–667, 2011. [Google Scholar]
80. N. Kandpal and B. M. Rao, “Implementation of PCA & ICA for voice ecognition and separation of speech,” in IEEE Int. Conf. on Advanced Management Science, Chengdu, China, pp. 536–538, 2010. [Google Scholar]
81. L. K. Saul and J. B. Allen, “Periodic component analysis: An eigenvalue method for representing periodic structure in speech,” in Advances in Neural Information Processing Systems. Vancouver, British Columbia, Canada, pp. 807–813, 2001. [Google Scholar]
82. K. Cengiz, “Comprehensive analysis on least squares lateration for indoor positioning systems,” IEEE Internet of Things Journal, vol. 8, no. 4, pp. 2842–2856, 2013. [Google Scholar]
83. NT5 Compact 1/2″ Cardioid Condenser Microphone. RODE Microphones. [Online]. Available: http://www.rode.com/microphones/nt5. [Google Scholar]
84. M. A. Jamshed, M. Ur-Rehman, J. Frnda, A. A. Althuwayb, A. Nauman et al., “Dual band and dual diversity four-element MIMO dipole for 5G handsets,” Sensors, vol. 21, no. 3, pp. 1–13, 2021. [Google Scholar]
85. C. Zeitnitz, “WaveIO: A soundcard interface for labview,” Christian Zeitnitz, 2017. [Online]. Available: https://www.zeitnitz.eu/scms/waveio. [Google Scholar]
86. J. Baros, R. Martinek, R. Jaros, L. Danys and L. Soustek, “Development of application for control of SMART parking lot,” IFAC-PapersOnLine, vol. 52, no. 27, pp. 19–26, 2019. [Google Scholar]
87. VB-CABLE Virtual Audio Device. VB-Audio Software, 2020. [Online]. Available: https://vb-audio.com/ Cable/. [Google Scholar]
88. W. Tarneberg, O. Hamsis, J. Hedlund, K. Brunnström, E. Fitzgerald et al., “Towards intelligent industry 4.0 5G networks: A first throughput and QoE measurement campaign,” in Int. Conf. on Software, Telecommunications and Computer Networks, Split, Hvar, Croatia, pp. 1–6, 2020. [Google Scholar]
89. J. Garcia-Morales, M. C. Lucas-Estan and J. Gozalvez, “Latency-sensitive 5G RAN slicing for industry 4.0,” IEEE Access, vol. 7, pp. 143139–143159, 2019. [Google Scholar]
90. A. Varghese and D. Tandur, “Wireless requirements and challenges in industry 4.0,” in Int.Conf. on Contemporary Computing and Informatics, Mysore, India, pp. 634–638, 2014. [Google Scholar]
91. J. Ordonez-Lucena, J. Folgueira Chavarria, L. M. Contreras and A. Pastor, “The use of 5G non-public networks to support industry 4.0 scenarios,” in IEEE Conf. on Standards for Communications and Networking, Granada, Spain, pp. 1–7, 2019. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |