DOI:10.32604/cmc.2022.024571
| Computers, Materials & Continua DOI:10.32604/cmc.2022.024571 | |
| Article |
Dynamic Vehicular Clustering Enhancing Video on Demand Services Over Vehicular Ad-hoc Networks
1Department of Management Information Systems and Production Management, College of Business and Economics, Qassim University, 6633, Buraidah, 51452, Saudi Arabia
2CONPRI Laboratory, University of Gabes, Tunisia
3IResCoMath Laboratory, University of Gabes, Tunisia
*Corresponding Author: L. Sellami. Email: l.sellami@qu.edu.sa; sellami_lamaa@yahoo.fr
Received: 22 October 2021; Accepted: 15 December 2021
Abstract: Nowadays, video streaming applications are becoming one of the tendencies driving vehicular network users. In this work, considering the unpredictable vehicle density, the unexpected acceleration or deceleration of the different vehicles included in the vehicular traffic load, and the limited radio range of the employed communication scheme, we introduce the “Dynamic Vehicular Clustering” (DVC) algorithm as a new scheme for video streaming systems over vehicular ad-hoc networks (VANET). The proposed algorithm takes advantage of the small cells concept and the introduction of wireless backhauls, inspired by the different features and the performance of the Long Term Evolution (LTE)-Advanced network. Vehicles are clustered together to form dynamically ad-hoc sub-networks included in the vehicular network. The goal of our clustering algorithm is to take into account several characteristics, such as the vehicle's position and acceleration to reduce latency and packet loss. Therefore, each cluster is counted as a small cell containing vehicular nodes and an access point that is elected regarding some particular specifications. Based on the exceptional features of the LTE-Advanced network (small cells and wireless backhauls) the DVC algorithm is a promising scheme for video streaming services over VANET systems. Experiments were carried out with a virtual topology of the VANET network created with four clusters to implement the DVC algorithm. The results were compared with other algorithms such as Virtual Trust-ability Data transmission (VTD), Named Data Networking (NDN), and Socially Aware Security Message Forwarding (SASMF). Our algorithm can effectively improve the transmission rate of data packets at the expense of a slight increase in end-to-end delay and control overhead.
Keywords: 5G; video-on-demand; vehicular ad-hoc network; mobility; vehicular traffic load; small cell; wireless backhaul; LTE-advanced; latency; packet loss
Vehicular ad-hoc networks (VANET) is a new emerging technology of mobile ad hoc networks (MANETs), where mobile nodes are intelligent vehicles, equipped with very high technology equipment (computers, radars, geolocation systems (GPS), various types of sensors, and network devices). VANETs networks allow inter-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications [1,2]. The different nodes can exchange any alerts or useful information to improve road traffic safety. But also data (music, video, advertisements…) to make the time spent on the road more pleasant and less boring. Generally, smart car designers have shown increasing attention for the employment of Dedicated Short Range Communication (DSRC) based on IEEE 802.11p [3–5] due to its low cost as well as its easy deployment and features’ adaptability to support V2V communications. However, DSRC [6] is not a suitable solution for a vehicle to infrastructure communication because of its limited radio range [7]. Therefore, there have been various studies among the literature suggesting the deployment of the fourth-generation Long Term Evolution (LTE) systems [8,9] as well as the next generation LTE advanced [10] to deal with vehicular communications. The proposed algorithm solved so many issues regarding VANET networks due to their high range, large bandwidth capacity, low latency, etc. However, vehicular network features such as dynamic network topology, high mobility, and random density among cell coverage make it quite hard for LTE to respond to VANET's requirements [11,12].
Video streaming applications’ requirements in terms of network resources management and quality of service (QoS) specifications have been the main issue for numerous studies during the last decade [13,14]. The dynamic data flow exchange and the various size of transmitted content make it quite difficult to provide resource allocation, content consistency, and congestion avoidance. Hence, most of the proposed strategies confirmed that it is more appropriate to deal with video streaming traffic separately especially among mobile networks. Moreover, the more the mobility is higher the more the streaming quality is degraded due to frequent handover and high latency. On the other hand, video streaming applications such as video-on-demand (VoD) are becoming trendy services for users connected via various types of mobile devices (e.g., mobile phone, tablet, car, etc.). Vehicular networks are more concerned with video streaming issues due to their high mobility, dynamic topology, and unpredictable user density. Therefore, video streaming among vehicular networks raises more QoS requirements challenges. The wireless network supporting vehicular communication must deal carefully with interferences, frequent handover issues, and video storage locations to enhance the streaming quality [15] in terms of content availability, low latency, minimum frame loss, optimal use of bandwidth, the optimal time of packet transfer, and suitable transmission delay. Ensuring the video availability to end-users requires proper management of storage and caching location. The user must receive the video with a quality of his preference and this is the main role of the proposed algorithm.
• Low latency: One of the main issues for video streaming over mobile networks is how to minimize the time of transit from end to end. This parameter is highly related to the scheme used to support mobile communication.
• Minimum frame loss: For the streaming continuity, the user should be able to perceive the demanded video without frequent disconnection. Therefore, his connection with the content provider must be stable (i.e., the link between source and destination should not be disturbed due to interferences or network congestion).
Nowadays, cellular networks are striving to serve a huge number of mobile users viewing videos over VoD services. Besides, video streaming services are easily influenced by network QoS parameter swings (e.g., bandwidth capacity, latency, packet loss rate, congestion, etc.). We have more communication challenges to report considering video streaming over vehicular networks [16]. High mobility and unpredictable users’ density make the process of delivering video content with the desired QoS, challenging in terms of resource allocation [17], content distribution, and interferences reduction. Therefore, the use of heterogeneous schemes to separate signaling traffic links and content flows seems to be a promising paradigm to reduce interferences among vehicular networks [18]. Most of the studies among the literature have studied connectivity issues, video content delivery, and signal interferences in static ad-hoc networks or networks with low mobility. However, mobile nodes among a VANET system are not restricted to a predefined traffic network since its multiple degrees of freedom (i.e., high mobile node) [19]. Furthermore, variable traffic density, unexpected acceleration or deceleration, and road capacity affect straightly cars mobility. Hence, the characteristics of vehicular networks influence user's connectivity (e.g., latency due to multiple handovers, unexpected disconnection due to roadside unit's low range, etc.). The exhibited results of static ad-hoc and low mobility networks cannot be directly applied to vehicular networks for the different features discussed above.
The problematic with this paper is to propose a dynamic algorithm called Dynamic Vehicular Clustering (DVC) to enhance both vehicle-to-vehicle and vehicle-to-Base station connectivity among high mobility networks. The proposed algorithm exhibits the impact of small cell deployment on connectivity and mobility performance in Long Term Evolution (LTE)-Advanced-based vehicular network. Furthermore, the introduction of 5G features into vehicular ad-hoc networks [20] such as the concept and communication of the small cell over wireless backhaul networks will enhance video content transmission due to its low latency and the utilized schemes to deal effectively with congestion and interferences issues.
The remainder of the paper is organized as follows: Section 2 introduces an overview of the related issues to video streaming and vehicular networks; Section 3 illustrates the proposed algorithm and highlights the different features of the clustering scheme; Section 4 evaluates the solution based on simulations results analysis and compares its performance to existing studies; Finally, Section 5 concludes the paper.
In the literature, there are numerous schemes to boost vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications regarding their features [21,22]. The common strategy promotes the use of a separate solution for each type of link. V2V communication links two or more vehicles directly (i.e., without infrastructure's relaying) to minimize control traffic and cope with range limitation among the mobile network [23]. Moreover, smart vehicles are nowadays equipped with high-performance processors and large caches. Hence, short-range networks can perfectly support this type of vehicular link since data management and storage are available using the car's smart-board without infrastructure's involvement. Dedicated Short Range Communication (DSRC) has been a highly recommended scheme to be serving V2V communication with effective support, high throughput, low latency, and low cost. V2I communication needs a robust wireless network to deal properly with interferences between different vehicles communicating with the infrastructure. The devoted scheme must support long-range communications to manage the vehicle's high mobility. Therefore, Long Term Evolution (LTE) and LTE Advanced are becoming very popular as the most promising techniques for V2I communications. The next generation will be more attractive to be deployed in vehicular networks especially with its tendency to establish communication with almost no latency, no more concerns about bandwidth capacity, very high throughput, etc. [24]. However, the case of dense cells remains a critical concern for vehicular networks that need effective employment of the existing schemes.
2.2 Device-To-Device Communication
It is considered a promising paradigm to have cooperative communication established directly between two or more wireless nearby devices (i.e., without having the base station involved). Device-to-Device communication shows major benefits in terms of reliability, spectral efficiency, storage capacity, and transmission range issues. A device-to-device (D2D) communication involves source, destination, and device relays which are the intermediate devices utilized as relaying nodes to transmit content over a massive ad-hoc mesh network. In the context of vehicular networks, video content relaying requires device dynamic location discovery to ensure durable communication within its neighbors to enhance content availability and minimize packet loss rate [25,26].
The base station (BS) will normally continue supervising and serving the devices through the macro cell regardless of the established D2D link. However, in the case of congested cells, the devices will create an ad-hoc mesh network and the BS services will be abolished. Therefore,device-to-device links can be whether controlled by the BS or in a decentralized mesh network. The BS can use devices among the cell to relay content to another device located at the edge of the concerned macrocell. This type of D2D link is established and supervised by the BS which continues its communication with the devices (Fig. 1). Another possible scenario for D2D communication is when the BS control is replaced by device-controlled links (Fig. 2). Hence, a direct link is established between devices from the source to destination to carry content over device relays without the BS control.
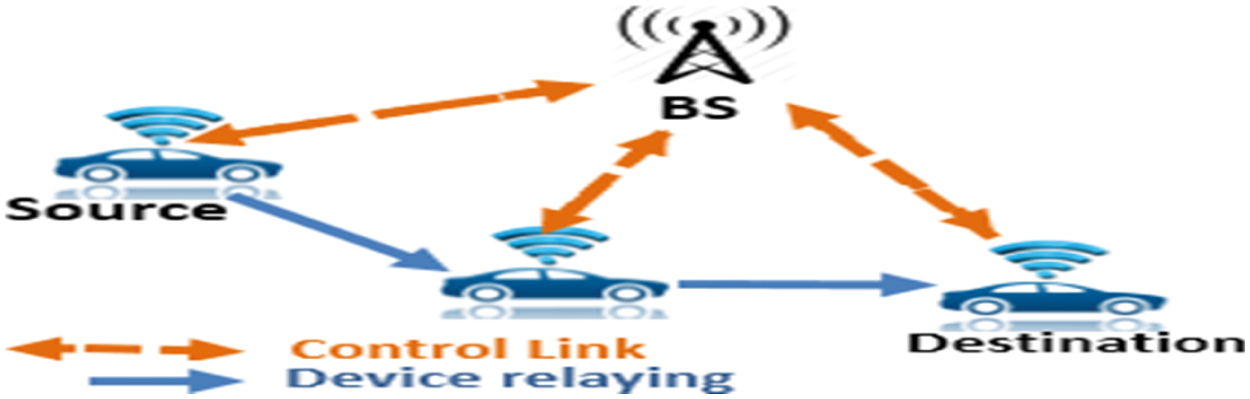
Figure 1: Device-to-device (D2D) communication with the base station (BS) controlled link

Figure 2: Device-to-device (D2D) communication with self-controlled links
Each device should be self-assisted to use effectively system resources. On the other hand, devices should exchange content using smart interference management schemes to reduce packet loss rate and performance degradation.
The concept of mobile small cells is a part of the 5G next-generation cellular network (Fig. 3) which contains 4G macro-cells, micro-cells, relays antenna, and small cells [27]. Small cells are also considered as mobile relays which have been proven effective and robust toward high mobility users such as communications among vehicular wireless networks [28].
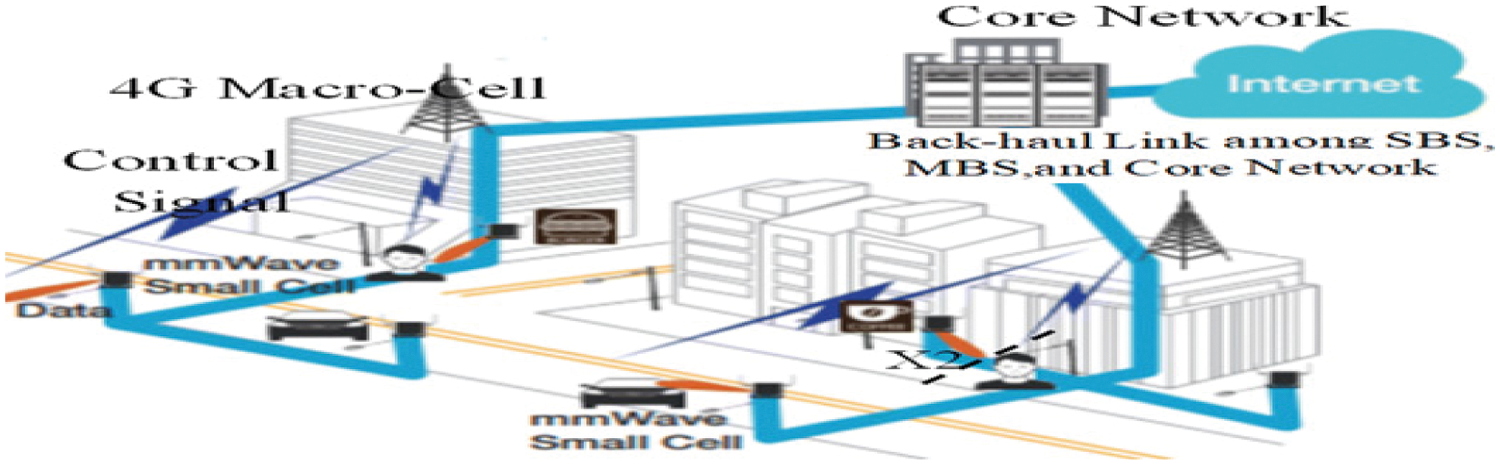
Figure 3: Small cells concept over 4G macrocell
The concept of introducing small cells is to arrange a group of mobile users in the same cluster so that the macro base station (MBS) considers them as one unit. Hence, the MBS will have communication with a predefined number of users through an access point (AP) which will be charged with the splitting of data indoor and outdoor in the small cell [29,30]. This will considerably reduce the network's congestion and the signaling overhead between mobile users and the MBS. Additionally, the integration of the access points among small cells can improve intra-cell performance due to device self-organizing disabling, interferences reduction, and device power consumption decrease.
2.4 Representative Approaches for Comparison
We discuss in this part some schemes which have dealt with similar vehicular ad-hoc networks (VANET) aspects (i.e., content distribution, clustering mode [31,32], interferences management, etc.) as the Dynamic Vehicular Clustering (DVC) algorithm proposed in this paper. In the following, both clustering-based approaches and non-clustering-based approaches are exhibited.
A clustering-based scheme [33–36] consists of dividing each road into equitable segments, then grouping in one cluster vehicles in the same road segments and running in the same direction. For each cluster, the nearest vehicle to the cluster center is elected as “cluster head”. Hence, the incoming content flow is received by the cluster head, which forwards the message to its destination. This strategy seems to have a great impact on reducing inter-clusters interferences. However, the proposed process of cluster formation is based on static road partitioning [37], without considering road density and high mobility zones. The cluster members receive the content from an external source that needs to communicate with the “cluster head” for each exchange and any attempt to establish a direct link between source and destination is abolished. This can cause message receiving delay, extra-communication cost, and heavy load overhead in case of high mobility or dense roads when the cluster nodes have to change frequently. On the other hand, the approach imposes a fixed head node which establishes the message forwarding. As a result, the path between the “cluster head” and the destination does not tolerate the “broken path” issues when one of the selected nodes proceeds with message forwarding accelerates suddenly. This can lead to a severe delay especially when the distance between the “cluster head” and the destination is so far. In [38], the authors proposed an efficient clustering scheme in VANET. This scheme is based on a machine learning classifier for a prediction of driver behavior. This diagram (called Naïve Bayes Prediction (NBP)) controls overtaking and driving speed decisions for an efficient analysis of a driver's habit. In [39], the authors developed a new method of identification of switched linear systems adapted to the urban VANET. This method allowed us to classify the nodes of the vehicle into a finite set of clusters. It is essentially based on an unsupervised and self-adapting node clustering algorithm combined with a regression technique. Based on a support kernel regression (SKR) technique, a multi-kernel regression function is identified for each cluster of vehicle nodes. They also adapted the learning rules to the proposed identification method.
For the non-clustering-based approaches [40,41] an optimal routing scheme is used to enhance message overhead problems that occur in the traditional broadcasting process [42,43]. The idea consists of sending the message to a “forwarding vehicle” which broadcasts it to all its nearest neighbors (1-hop) [44]. When receiving the content, the underlying neighbors send back a response message and stand by. The “forwarding vehicle” chooses a neighbor list considering the message response delay, to define the suitable nodes to establish the message delivery. Then a “select message” is sent to all the selected neighbors and the process of content delivery is triggered.
Compared to the schemes surveyed above, our objectives are to introduce a dynamic clustering process to deal with road load frequent updates and high mobility environments problems. Moreover, the advantage of our scheme is that it does not rely on dissemination, but it relies on more targeted communication. For each cluster, a head node is elected not as a “forwarding node” but as an access point to handle all exchanges between the cluster and the roadside units. In the following, section a detailed description of our proposed algorithm.
The small cells concept is considered an unavoidable solution for the next-generation 5G network's architecture. Regardless of its drawbacks, we are developing in this paper an adaptive system model inspired by the features of small cells and a 5G wireless backhaul network's management in ultra-dense small cells.
3.1 System Model and Problem Formulation
To remedy the problems of unpredictable vehicle density, unexpected acceleration or deceleration of different cars included in the vehicle traffic load, and the limited radio range of the communication scheme used, we introduce a model of Dynamic Vehicle Clustering (DVC) for video content delivery over next-generation macrocells (MC).
A cluster contains the Client Vehicle (i.e., the car requiring the video content), the Peers having already stored the video, the Relaying Vehicles, and the Access Point (AP). Our goal is to enhance both vehicle-to-vehicle and vehicle-to-Base station connectivity among high mobility networks. It is a question to dynamically divide traffic into several clusters to guarantee a certain balance of load and resources available between the various VANET network vehicle nodes. The network's design that we introduce includes a single macro-cell with a Macro Base Station (MBS), a random number of clusters called ‘Friendly Groups’ (FG), and car users (CU), the MBS coverage overlaps with all the other FG.
Architecture. We consider a set
AP
Interference Coordination Techniques (eICIC) proposed in Long Term Evolution (LTE) Rel. 10 to deal with interferences between neighboring APs. It offers resource partitioning between the macro cell and small cell to improve the offload of traffic to the small cell layer [47]. Hence, the technique optimizes the scheduling process by offering the possibility to coordinate the resource usage between the MBS and each AP.
Video requests. In this paper, user requests are modeled by
•
•
•
The main use of Dynamic Vehicles Clustering (Fig. 4) is to reduce signalization messages exchanged among the macro cell. Therefore, this scheme can help reduce interferences, which will normally decrease the frame loss rate. On the other hand, it defines a heterogeneous scheme for vehicular communications, which deals separately with vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) links. Direct V2V communication can be ideally supported by the Dedicated Short Range Communication (DSRC) scheme described in the Section 2, while the next-generation 5G network's features will be used for AP to MBS backhaul link. Hence, combining these communication schemes can provide a streaming service with low latency and better performances.
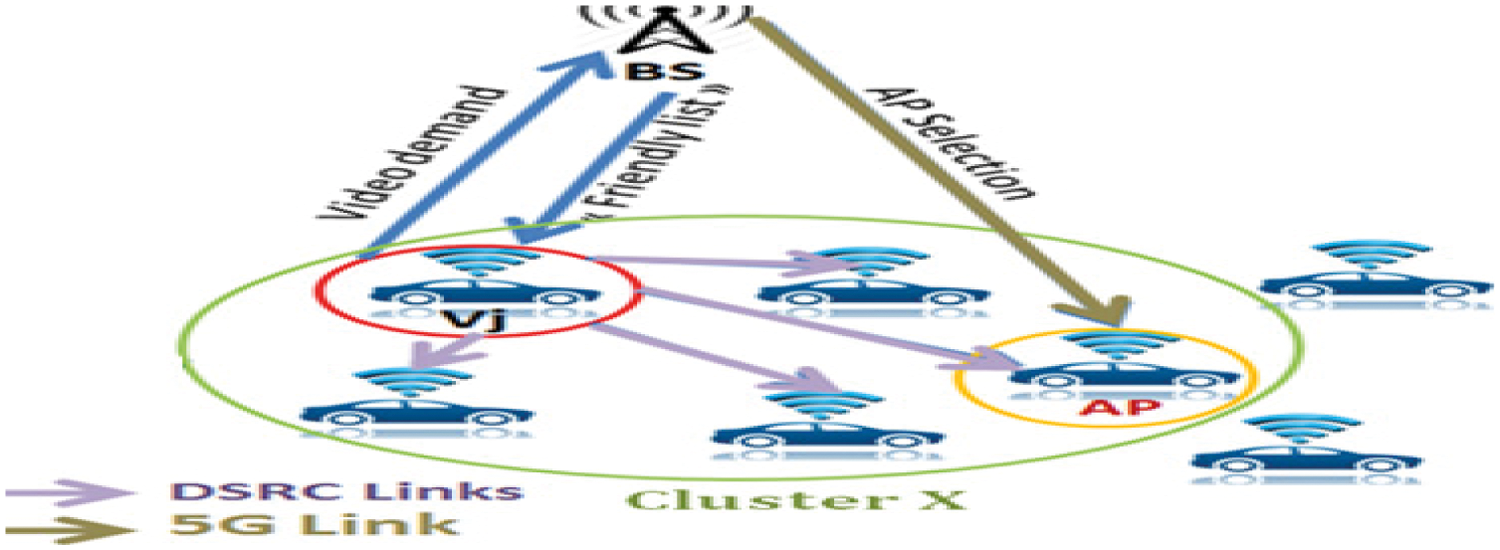
Figure 4: Dynamic vehicles clustering architecture
3.2 Dynamic Vehicles Clustering Features
Friendly List. The macro base station (MBS) creates dynamic lists of vehicles storing each video to facilitate content location. The macrocell is subdivided into
Access Point Selection. The definition of an AP among vehicles contained in a cluster aims mainly for the limitation of backhauls’ congestion. Therefore, the proposed strategy intends to discard all backhauls established between vehicles inside the cluster and the MBS, other than AP's backhaul (Fig. 5). This scheme can be useful for backhauls congestion avoidance.
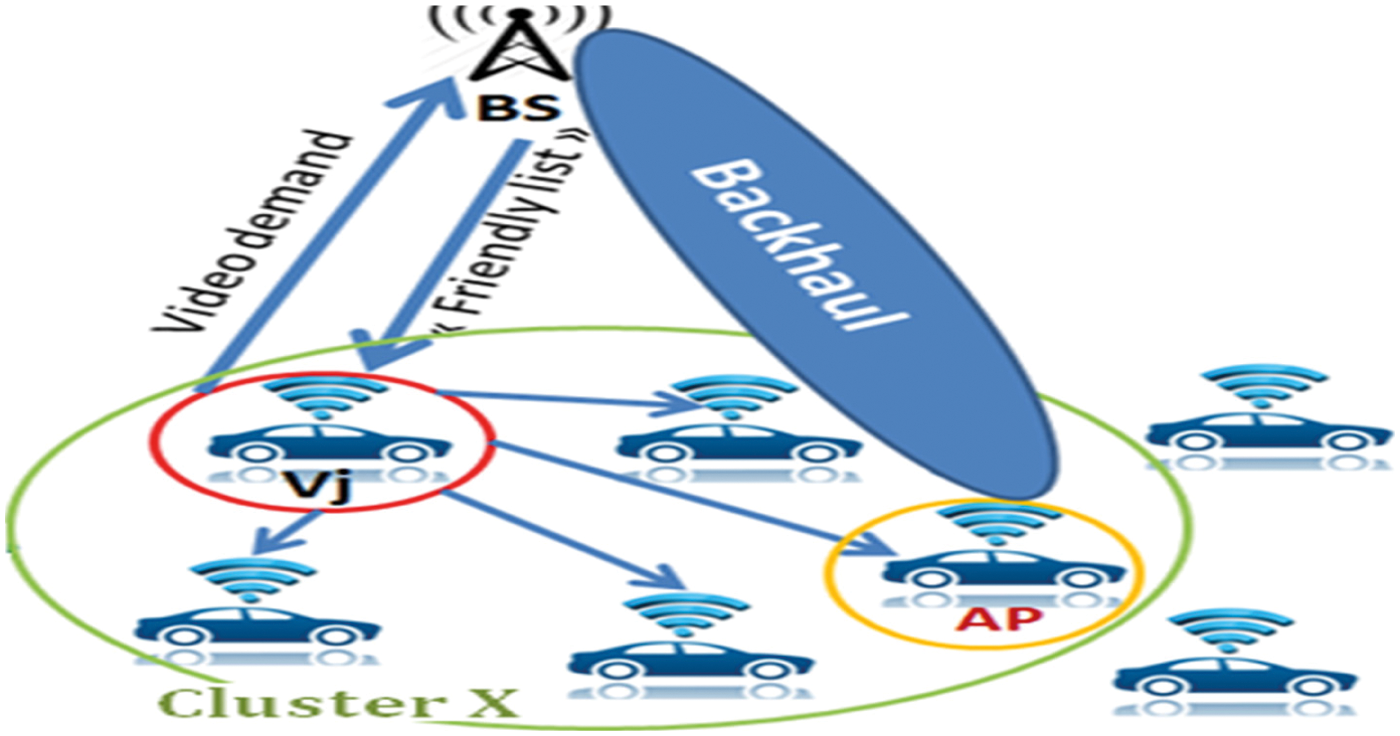
Figure 5: Dynamic vehicles clustering architecture with backhaul establishment
However, the selection of the appropriate AP in each cluster is a critical decision. The MBS should be permanently at the sight of the selected AP to maintain the best Signal-to-Interference-plus-Noise-Ratio (SINR) for the backhaul link. The base station should verify that the current SINR keeps not being below a predefined threshold (SINR_Back_Thresh). Otherwise, the MBS triggers a new AP selection process (i.e., When current SINR < SINR_Back_Thresh).
Besides the V2V link's control inside the cluster, an AP has to define the best Relays Vector (RV) that ensures content transmission with low latency. An RV refers to the different relaying nodes transporting the video content from the destination source.
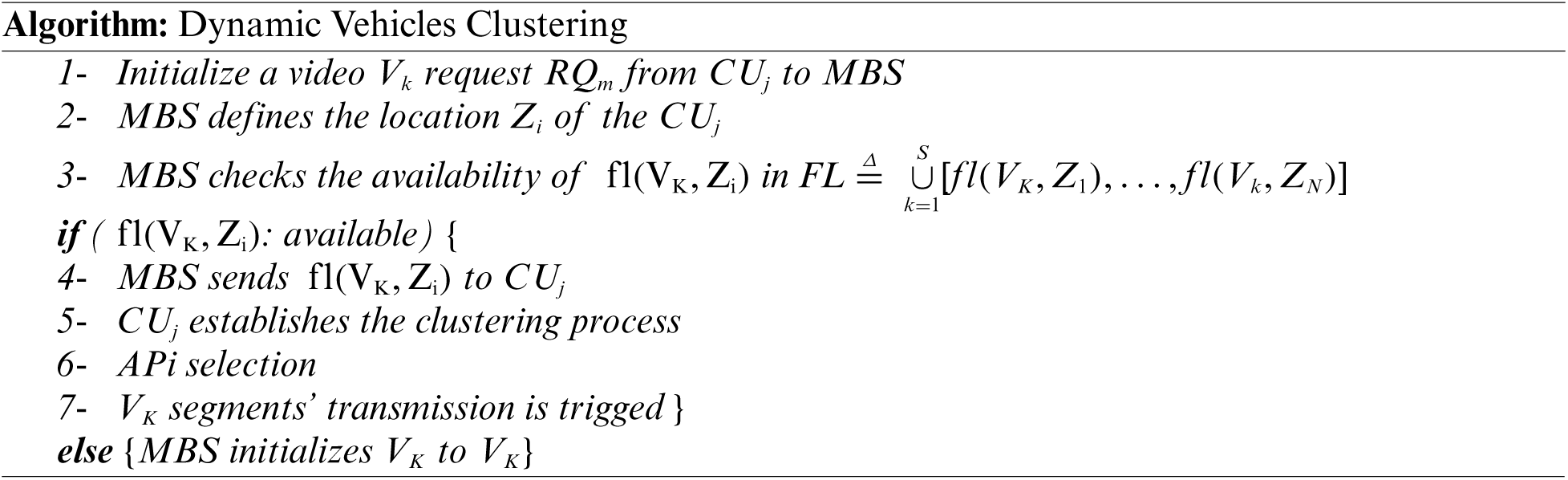
3.3 Algorithm: Dynamic Vehicles Clustering
Based on the parameters described above, we introduce in the rest of this section a description of our Dynamic Vehicles Clustering scheme.
• When a car user
• Then, the MBS checks the friendly list
• The other case is when the video is still available in the located area. The MBS sends the corresponding friendly list
⇒ A clustering process is triggered and

Figure 6: Inter-cluster's exchange
• The MBS selects one of the clustered vehicles to be an access point
•
A summary of the proposed approach is presented in the algorithm below:
4 Simulation Results and Analysis
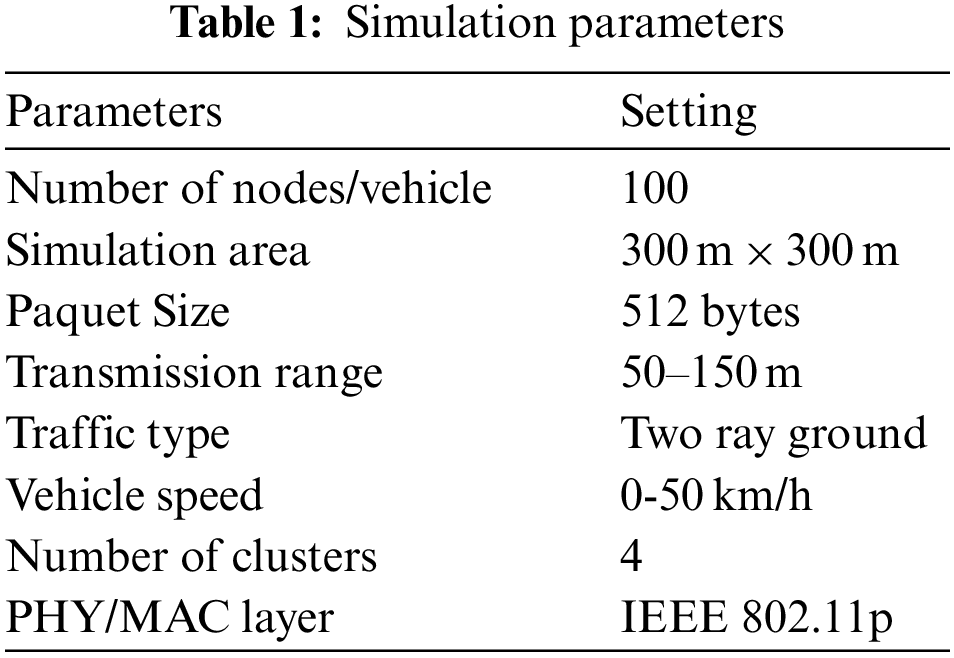
In the proposed study, the major intention is to develop a suitable technique based on the exceptional features of the Long Term Evolution-Advanced (LTE-Advanced) network (small cells and wireless backhauls) for the controlling of video streaming services over vehicular ad-hoc networks (VANET) systems and to providing trust-based communication. Dynamic Vehicular Clustering (DVC) algorithm is implemented using MATLAB in the windows platform on the PC with Intel Core i7 and 8 GB RAM. The proposed system is analyzed based on the performances such as packet failure, bandwidth utilization, response time, and network scalability. The simulation parameters of VANET using the DVC algorithm are given in Tab. 1.
The vehicle nodes (VN) act as 802.11p wireless access points (APs) to communicate between them in the coverage range in 100 m x 100 m and we set the bandwidth as 20 Mbps. In created network given in Fig. 7, we have included 100 vehicles moving on the paths in random directions and uniformly distributed and with a speed between 0-50 km/h.
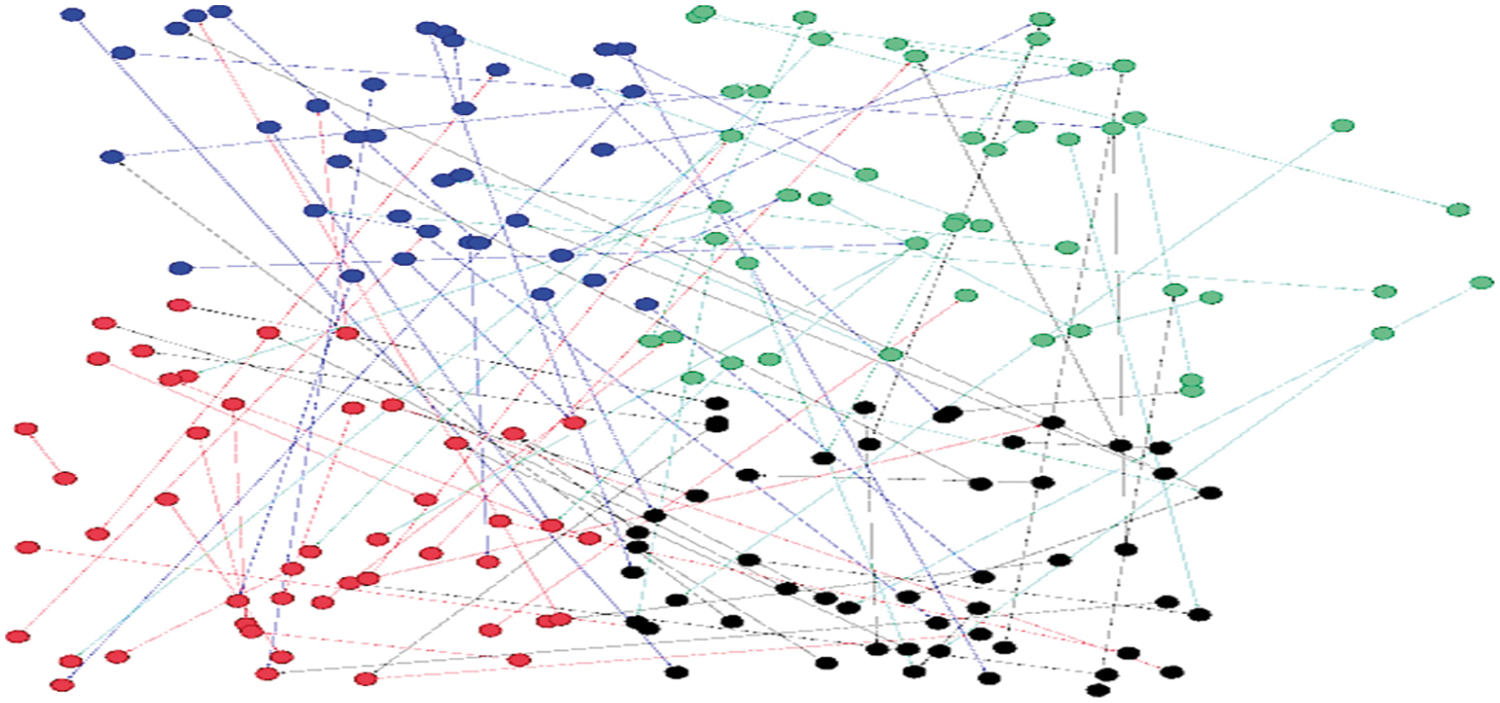
Figure 7: Initial topology for the experiments
The virtual topology of the VANET network is created with four clusters as given in Fig. 7 and each cluster has a node to analyze the trustability. The nodes are represented as “●” and the four clusters are differentiated by spotting different colors.
The packets failure report without the application of a management algorithm is given in Fig. 8. This report (packet loss) shows the measurement of the number of lost packets compared to the total number of transmitted packets. We can discover that packet loss randomly increases with the number of vehicle nodes.
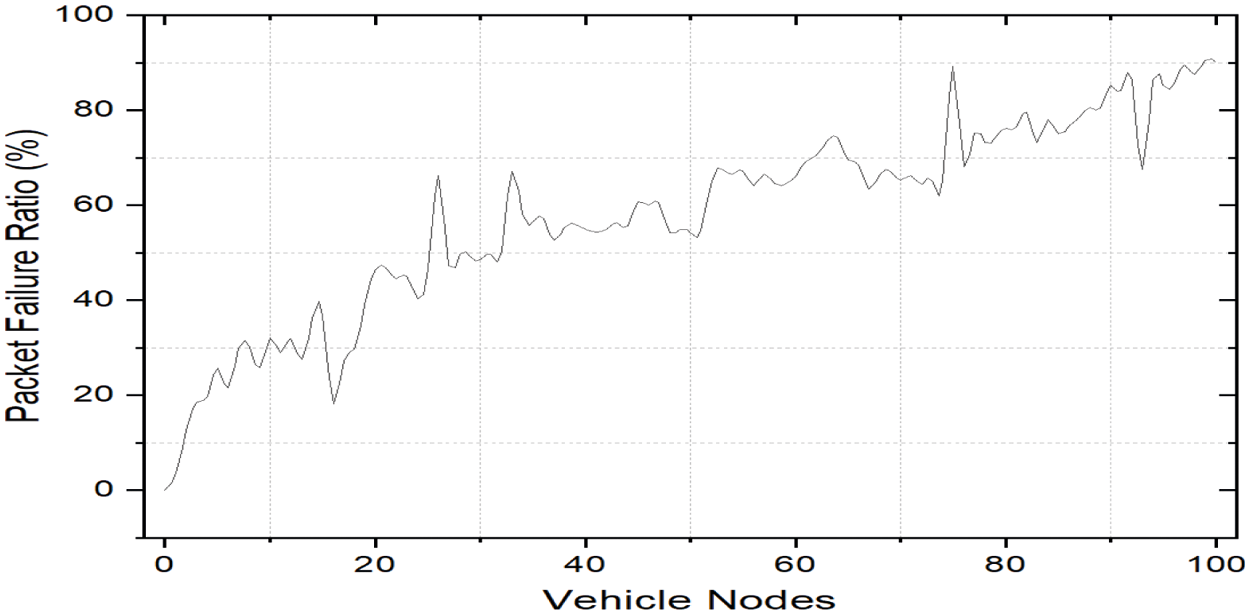
Figure 8: Packet failure ratio
We then calculate the packet loss ratio, bandwidth utilization, responses times, system throughput, and transmission delay, which are presented as follows:
• Packet loss ratio: this is the ratio of the number of packets lost to the number of packets sent. Unlike audio/video type applications, file transfer type applications do not tolerate data packet loss.
• Bandwidth: this is the maximum volume of information per time unit that a link between two nodes can absorb without creating a queue. At any given time, the link must have enough bandwidth to absorb the traffic generated by the application.
• Response time: This is the time taken to transfer a packet between a source node and a destination node.
• The system throughput: is the sum of the data rates that are delivered to all terminals in the VANET network.
• Transmission delay: is the time it takes to transmit a data packet onto the outgoing link.
Fig. 9 illustrates the average probability of packet loss on the arrival rate of vehicle nodes with the application of our DVC algorithm and by comparing it with other algorithms such as Virtual Trust-ability Data transmission (VTD) [49], Named Data Networking (NDN) [50], and Socially Aware Security Message Forwarding (SASMF) [51]. The arrival rate of packets varies between 50 and 100 packets/s. It is clear that more than 80% of packets are delivered so that the loss is reduced by less than 20% with DVC in the interval from 0 to 50 vehicle nodes, also more than 50% of packets are delivered, so that the loss is reduced by less than 50% in the case of higher loads, in particular between 50 and 100 vehicle nodes. In cases where the arrival rate (n) of vehicle nodes is low (n < 20), the packet loss rates between DVC and VTD are almost similar. Indeed, with this low number of vehicle nodes, the collisions are limited. When n becomes big (n > 50), our algorithm gives better results to avoid excessive packets collisions and reduce the packet error rate. Take n = 100, the probability of packet loss decreases by more than 20% with our proposed algorithm compared to the VTD algorithm, more than 25% compared to the NDN algorithm, and more than 40% compared to the SASMF algorithm. Fig. 9 clearly shows that the proposed DVC algorithm has reduced the average packet failure rate of normal VANET communication. Consequently, the proposed technique then improves the packet delivery rate. The use of bandwidth is shown in Fig. 10.
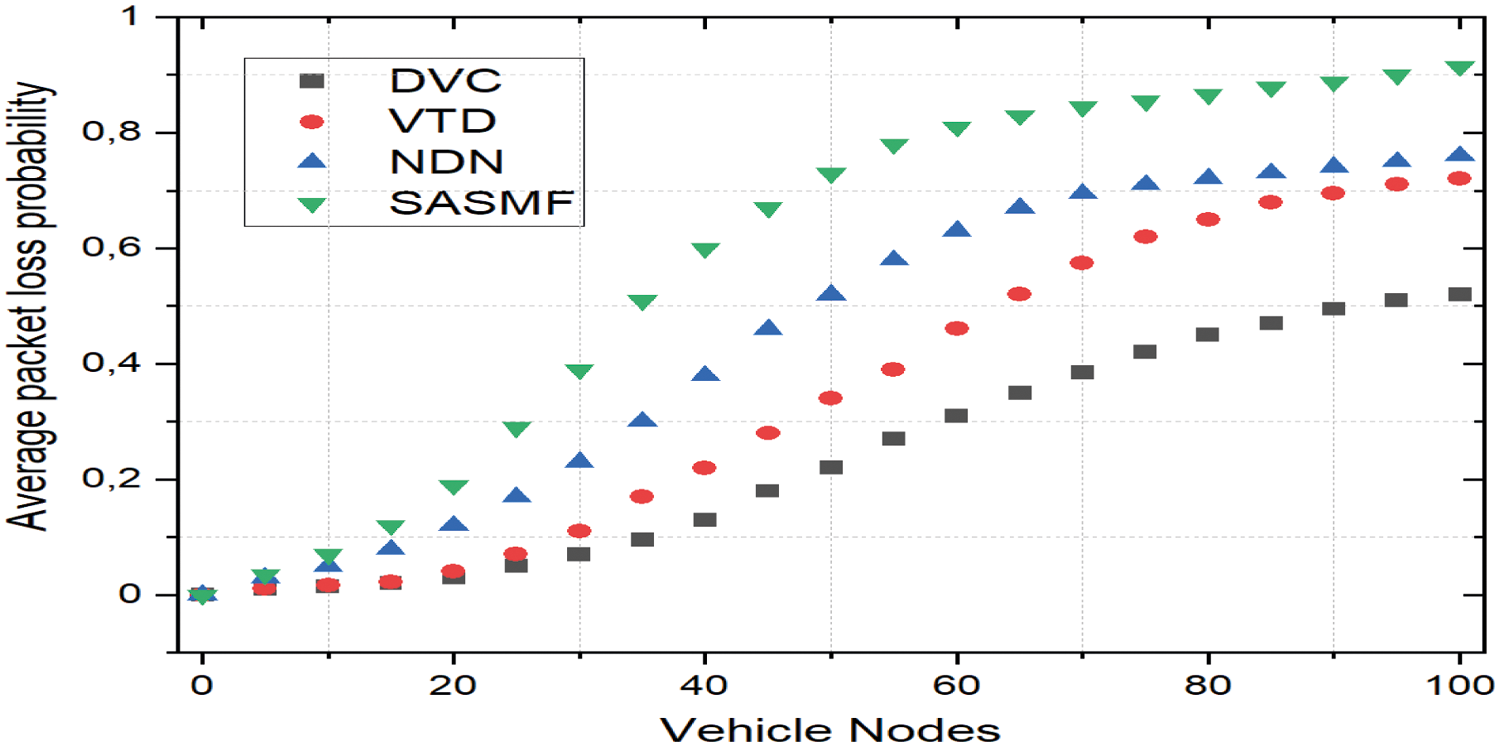
Figure 9: Average packet loss probability vs. the number of vehicle nodes
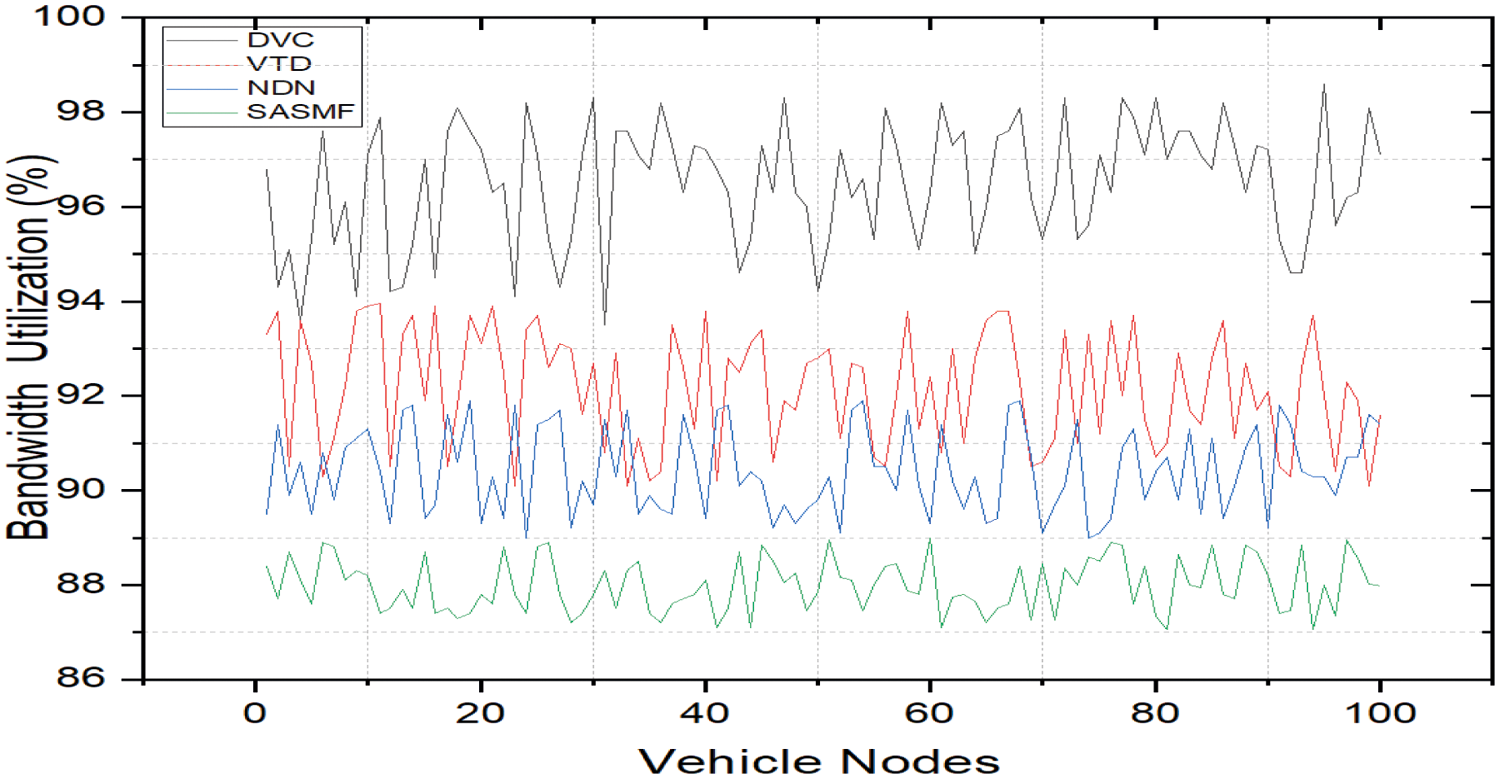
Figure 10: Bandwidth utilization with and without DVC algorithm
Fig. 10 clearly shows that the bandwidth with the DVC algorithm is efficiently used in our VANET network. Our VANET network uses around 98% of the bandwidth, while the DVC algorithm reduces it and uses up to 92%. Therefore, integrating the DVC algorithm into VANET has effectively managed bandwidth usage. We can see that our new algorithm gives better results of simulation in all the spectrum of n, notably, an average and equitable use of the bandwidth in all load situations.
On the other hand, the other algorithms give either a maximum or minimum use of the bandwidth which is not preferable for VANET networks.
As n increases, the use of bandwidth increases and decreases with DVC but in an interval of 89% to 92% which is still bearable by the VANET network. The figures also show that bandwidth usage increases and decreases randomly, rather than growing completely with n.
In Fig. 11, we compare the scalability of our VANET network. We evaluate the scalability of the network according to the response time. As the rate of arrival of vehicle nodes increases, the average response time is calculated and illustrated in Fig. 11.
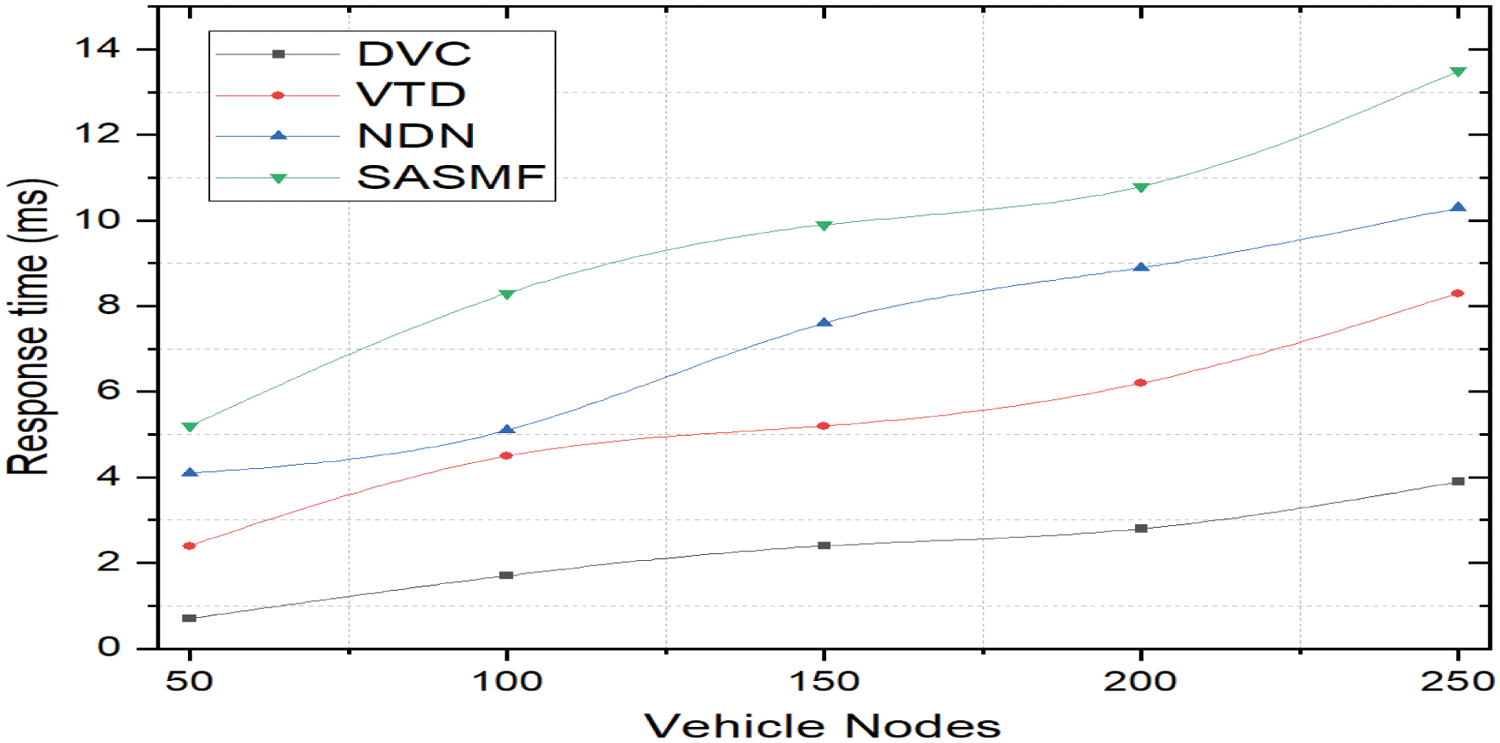
Figure 11: Response time with and without DVC algorithm
Fig. 11 shows the comparison results of response time for DVC, VTD, NDN, and SASMF algorithms under different numbers of vehicle nodes. Fig. 11 shows the network scalability by varying the number of vehicle nodes. We can observe that the DVC algorithm has reached between 0.2 and 4 ms response time in terms of 50 at 250 vehicle nodes. On the other hand, compared to the other algorithms, one can also observe that DVC reached between 10% and 25% of the value of response time less than VTD, NDN, and SASMF algorithms with the same density of traffic. However, in the scenario of 100 car knots or less, DVC produces better response time values with less than 1 ms.
The comparison between the different algorithms shows that the performance degrades while increasing the number of vehicle nodes, among other techniques using the DVC algorithm the performances are better and have reached better scalability. These results indicate that DVC is an algorithm well suited for an application that requires reliable delivery of video packets in a high traffic VANET network.
Fig. 12 shows the system throughput as a function of the number n of nodes vehicles. It is confirmed with the application of our DVC algorithm that, traffic of size n = 50 has a maximum throughput. The difference between DVC and the other comparison algorithms increases with an increase in the value of n because the packet loss with DVC decreases compared to the other algorithms.
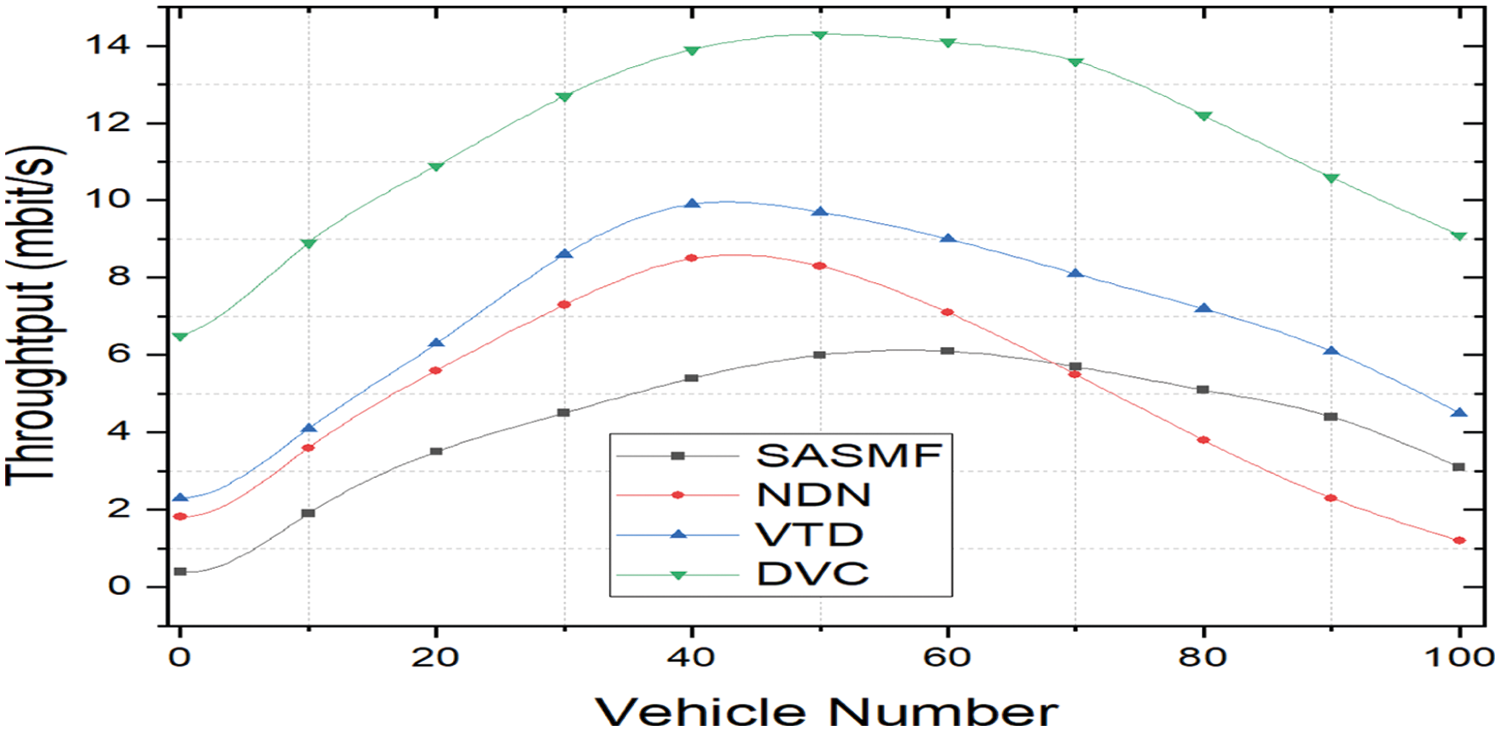
Figure 12: System throughput vs. vehicle nodes arrival rate
For example, when n = 70 the difference is around 5 Mbit/s between DVC and the VTD algorithm that represents the closest results. Fig. 12 also indicates that when the number of n is small, the network can support a wider range of traffic demand (or in other words, packet arrival) rates with a limited loss of throughput. For example, with n∈ [70, 100], the system can reach a throughput of more than 7 Mbits/s compared to the SASMF algorithm. On the other hand, n must be in a small region around 40 to 60 to allow the system to reach a throughput higher than 14 Mbits/s. In this sense, with a small to medium n number for our DVC algorithm becomes more robust in practical VANET systems.
As shown in Fig. 13 our VANET network will be busier when the rate of video requests from each vehicle node increases. From our results presented in Fig. 13, we can conceive that the guarantee of optimal performances of transmission of real-time video packets requires a delay of at least 1.8 ms with the DVC algorithm. Likewise, even in the case where the number n of vehicle nodes is 100, the transmission delay is also acceptable (no more than 3 ms) mainly due to our algorithm and the high bandwidth of the VANET network. Increasing traffic generally leads to frequent changes in the network topology. Thus, the results show that the transmission delay increases in high-speed scenarios. The proposed algorithm allows a significant reduction in the transmission delay compared to other schemes. DVC creates stable clusters that can guarantee sufficient connectivity and a reliable link. As a result, the retransmission times and the transmission delay are reduced, which results in a reduction of the transmission delay. Another reason is that using stable connected clusters, packets can be delivered to the next hop with reduced conflict, which leads to short network latency.
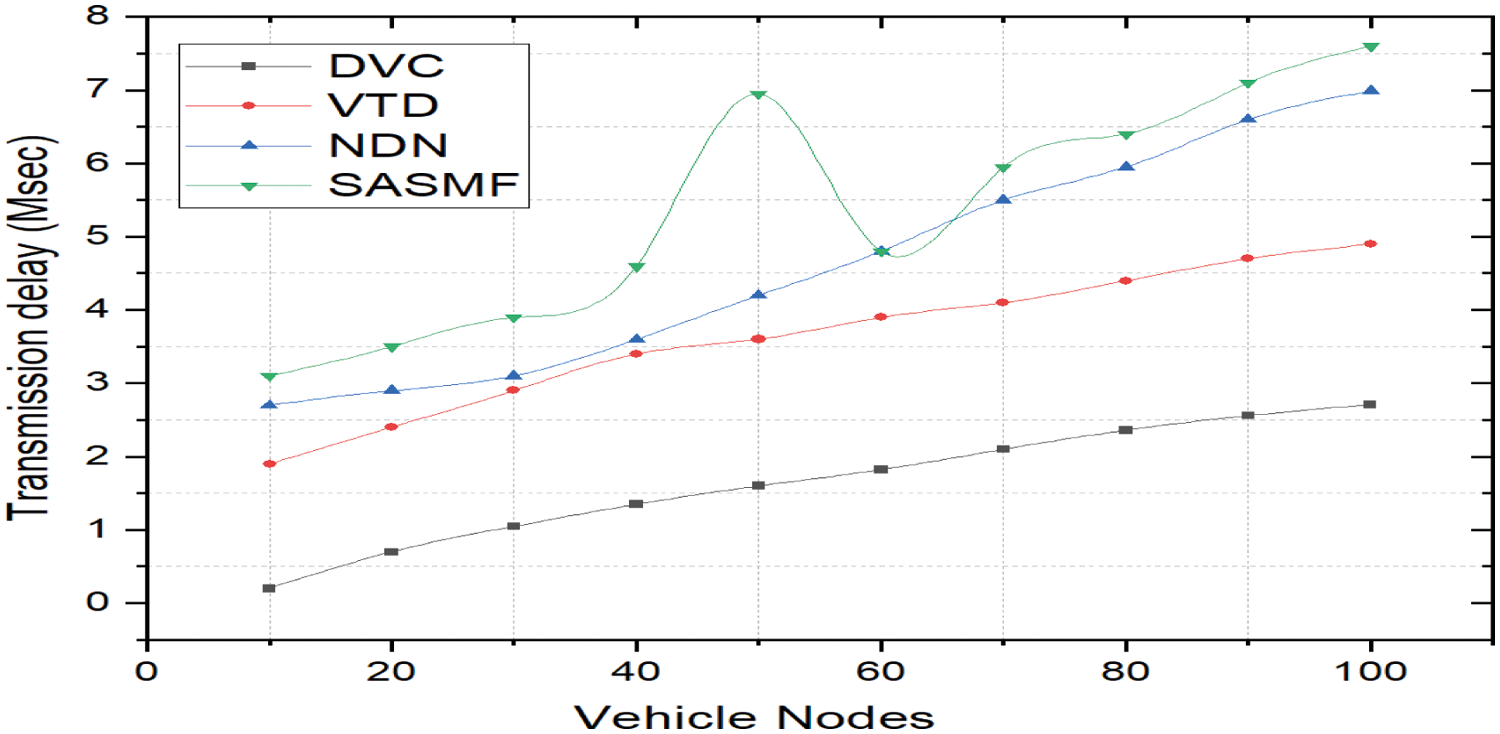
Figure 13: Transmission delay for varying vehicle node number
In this paper, we have proposed a dynamic algorithm “Dynamic Vehicle Clustering” (DVC) as a new scheme for video streaming systems on vehicular ad-hoc networks (VANET) taking into account the unpredictable density of vehicles, unexpected acceleration or deceleration of different cars included in the vehicle traffic load and the limited radio range of the communication scheme used. We have introduced a wireless link inspired by the different functionalities and performance of the Long Term Evolved Network (LTE)-Advanced. Our algorithm is proposed to enhance both vehicle-to-vehicle and vehicle-to-Base station connectivity among high mobility networks.
Our policy has allowed us to dynamically divide traffic into several clusters. Another objective of this article is to guarantee a certain balance of load and resources available between the various VANET network vehicle nodes. We also noted that the cooperation and the distribution of the load between the various clusters simplify the calculations and accelerate the task of diffusion of the packets and also reduce the time of convergence of the VANET network towards the state of equilibrium.
The results of theoretical analysis and experiences illustrate the effectiveness of our application of the DVC algorithm due to the reduction of delays for the VANET network and the convergence towards a steady-state is greatly improved.
Funding Statement: This work was supported by Qassim University.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. W. Drira, K. H. Ahn, H. Rakha and F. Filali, “Development and testing of a 3G/LTE adaptive data collection system in vehicular networks,” IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 1, pp. 240–249, 2016. [Google Scholar]
2. G. Araniti, C. Campolo, M. Condoluci and A. Molinaro, “LTE for vehicular networking: A survey,” IEEE Communications Magazine, vol. 51, no. 5, pp. 148–157, 2013. [Google Scholar]
3. S. J. Yim, “Preview controller design for vehicle stability with v2v communication,” IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 6, pp. 1497–1506, 2017. [Google Scholar]
4. Z. H. Mir and F. Filali, “Large-scale simulations and performance evaluation of connected cars-A V2V communication perspective,” Simulation Modeling Practice and Theory, vol. 72, pp. 88–103, 2017. [Google Scholar]
5. R. Zhang, L. Cao, S. Bao and J. Tan, “A method for connected vehicle trajectory prediction and collision warning algorithm based on V2V communication,” International Journal of Crashworthiness, vol. 22, no. 1, pp. 15–25, 2016. [Google Scholar]
6. M. M. I. Taha and Y. M. Y. Hasan, “VANET-DSRC protocol for reliable broadcasting of life safety messages,” IEEE Int. Symp. on Signal Processing and Information Technology, Giza, Egypt, pp. 104–109, 2007. [Google Scholar]
7. J. Kenney, “Dedicated short-range communications (DSRC) standards in the United States,” in Proc. of the IEEE, vol. 99, no. 7, pp. 1162–1182, 2011. [Google Scholar]
8. H. Seo, K. D. Lee, S. Yasukawa, Y. Peng and P. Sartori, “LTE evolution for vehicle-to-everything services,” IEEE Communications Magazine, vol. 54, pp. 22–28, 2016. [Google Scholar]
9. S. Ucar, S. C. Ergen and O. Ozkasap, “Multihop-cluster-based IEEE 802.11p and LTE hybrid architecture for vanet safety message dissemination,” IEEE Transactions on Vehicular Technology, vol. 65, pp. 2621–2636, 2015. [Google Scholar]
10. A. S. Chekkouri, A. Ezzouhairi and S. Pierre, “A new integrated VANET-LTE-A architecture for enhanced mobility in small cells HetNet using dynamic gateway and traffic forwarding,” Computer Networks, vol. 140, pp. 15–27, 2018. [Google Scholar]
11. A. Vinel, “3GPP LTE versus IEEE 802.11p/WAVE: Which technology is able to support cooperative vehicular safety applications,” IEEE Wireless Communications Letters, vol. 1, pp. 125–128, 2012. [Google Scholar]
12. E. Yaacoub, F. Filali and A. A. Dayya, “QoE enhancement of SVC video streaming over vehicular networks using cooperative LTE/802.11p communications,” IEEE Journal of Selected Topics in Signal Processing, vol. 9, no. 1, pp. 37–49, 2015. [Google Scholar]
13. L. Mendiboure, M. Chalouf and F. Krief, “Edge computing based applications in vehicular environments: Comparative study and main issues,” Journal of Computer Science and Technology, vol. 34, pp. 869–886, 2019. [Google Scholar]
14. M. S. Mushtaq, S. Fowler, B. Augustin and A. Mellouk, “QoE in 5G cloud networks using multimedia services,” in IEEE Wireless Communications and Networking Conf. (WCNC), Doha, Qatar, pp. 1–6, 2016. [Google Scholar]
15. I. Wahid, F. Ullah, M. Ahmad, A. Khan, M. I. Uddin et al., “Quality of service aware cluster routing in vehicular ad hoc networks,” Computers, Materials & Continua, vol. 67, no. 3, pp. 3949–3965, 2021. [Google Scholar]
16. S. Jeon, G. Kim and B. Kim, “Study on V2V-based AEB system performance analysis in various road conditions at an intersection,” International Journal of Software Engineering and Its Applications, vol. 9, no. 7, pp. 1–10, 2015. [Google Scholar]
17. G. G. Deverajan and R. Saravanan, “Selfish node detection based on evidence by trust authority and selfish replica allocation in DANET,” International Journal of Information and Communication Technology, vol. 9, no. 4, pp. 473–491, 2016. [Google Scholar]
18. X. Ge, H. Cheng, M. Guizani and T. Han, “5G wireless backhaul networks: Challenges and research advances,” IEEE Network, vol. 28, no. 6, pp. 6–11, 2014. [Google Scholar]
19. M. T. Abbas, A. Muhammad and W. C. Song, “Road-aware estimation model for path duration in internet of vehicles (iov),” Wireless Personal Communications, vol. 109, no. 2, pp. 715–738, 2019. [Google Scholar]
20. M. Afaq, J. Iqbal, T. Ahmed, I. U. Islam, M. Khan et al., “Towards 5G network slicing for vehicular ad-hoc networks: An end-to-end approach,” Computer Communications, vol. 149, pp. 252–258, 2020. [Google Scholar]
21. C. R. Storck and F. D. Figueiredo, “A 5G v2x ecosystem providing internet of vehicles,” Sensors, vol. 19, no. 550, pp. 1–20, 2019. [Google Scholar]
22. D. Lin, J. Kang, A. Squicciarini, Y. W. Gurung and O. Tonguz, “MoZo: A moving zone based routing protocol using pure v2v communication in vanets,” IEEE Transactions on Mobile Computing, vol. 16, no. 5, pp. 1357–1370, 2017. [Google Scholar]
23. K. Zheng, L. Hou and H. Meng, “Soft-defined heterogeneous vehicular network: Architecture and challenges,” IEEE Network, vol. 30, no. 4, pp. 72–80, 2016. [Google Scholar]
24. R. Montero, F. Agraz, A. Pagès and S. Spadaro, “Enabling multi-segment 5 g service provisioning and maintenance through network slicing,” Journal of Network and Systems Management, vol. 28, pp. 340–366, 2020. [Google Scholar]
25. J. Wang, Y. Shao, Y. Ge and R. Yu, “A survey of vehicle to everything (v2x) testing,” Sensors, vol. 19, no. 2, pp. 1–20, 2019. [Google Scholar]
26. D. V. Khairnar and S. N. Pradhan, “V2v communication survey-(wireless technology),” International Journal on Computer Technology & Applications, vol. 3, no. 1, pp. 370–373, 2012. [Google Scholar]
27. D. Minolim and B. Occhiogrosso1, “Practical aspects for the integration of 5 g networks and iot applications in smart cities environments,” Wireless Communications and Mobile Computing, vol. 2019, pp. 1–30, 2019. [Google Scholar]
28. A. Kumar and M. Gupta, “A review on activities of fifth generation mobile communication system,” Alexandria Engineering Journal, vol. 57, no. 2, pp. 1125–1135, 2018. [Google Scholar]
29. J. Liu, C. Lin and H. Huang, “Joint congestion control and resource allocation for energy-efficient transmission in 5G heterogeneous networks,” EURASIP Journal on Wireless Communications and Networking, vol. 2019, no. 227, pp. 1–16, 2019. [Google Scholar]
30. M. Peng, C. Wang, J. Li, H. Xiang and V. Lau, “Recent advances in underlay heterogeneous networks: Interference control, resource allocation, and self-organization,” IEEE Communications Surveys & Tutorials, vol. 17, no. 2, pp. 700–729, 2015. [Google Scholar]
31. R. Hajlaoui, E. Alsolami, T. Moulahi and H. Guyennet, “An adjusted K-medoids clustering algorithm for effective stability in vehicular ad hoc networks,” International Journal of Communication Systems, vol. 32, no. 12, pp. 1–16, 2019. [Google Scholar]
32. B. Alaya and L. Sellami, “Clustering method and symmetric/asymmetric cryptography scheme adapted to securing urban VANET networks,” Journal of Information Security and Applications, vol. 58, pp. 102779, 2021. [Google Scholar]
33. R. Hajlaoui, E. Alsolami, T. Moulahi and H. Guyennet, “Construction of a stable vehicular ad hoc network based on hybrid genetic algorithm,” Telecommunication Systems, vol. 71, pp. 433–445, 2019. [Google Scholar]
34. B. Alaya, “Efficient privacy-preservation scheme for securing urban P2P VANET networks,” Egyptian Informatics Journal, vol. 22, no. 3, pp. 317–328, 2021. [Google Scholar]
35. T. Song, W. Xia, T. Song and L. Shen, “A Cluster-based directional routing protocol in vanet,” in IEEE Int. Conf. on Communication Technology, Nanjing, China, pp. 1172–1175, 2010. [Google Scholar]
36. B. Alaya, “Payoff-based dynamic segment replication and graph classification method with attribute vectors adapted to urban vanet,” ACM Transactions on Multimedia Computing, Communications, and Applications, vol. 17, no. 85, pp. 1–22, 2021. [Google Scholar]
37. Y. Luo, W. Zhang and Y. Hu, “A new cluster based routing protocol for vanet,” in Int. Conf. on Networks Security Wireless Communications and Trusted Computing, Wuhan, China, pp. 176–180, 2010. [Google Scholar]
38. T. Liu, S. Shi and X. Gu, “Naive Bayes classifier based driving habit prediction scheme for vanet stable clustering,” Mobile Networks and Applications, vol. 25, pp. 1708–1714, 2020. [Google Scholar]
39. S. T. Hasson and A. T. Abbas, “A clustering approach to model the data dissemination in vanets,” in Babylon Int. Conf. on Information Technology and Science (BICITS), Babil, Iraq, pp. 337–342, 2021. [Google Scholar]
40. H. H. Saleh and S. T. Hasson, “A survey of routing algorithms in vehicular networks,” in Int. Conf. on Advanced Science and Engineering (ICOASE), Zakho, Duhok, Iraq, pp. 159–164, 2019. [Google Scholar]
41. P. Ruiz, V. Cabrera, J. Martinez and F. Ros, “Brave: Beacon-less routing algorithm for vehicular environments,” in IEEE Int. Conf. on Mobile Adhoc and Sensor Systems (MASS), San Francisco, CA, USA, pp. 709–714, 2010. [Google Scholar]
42. A. J. Manuel, G. G. Deverajan, R. Patan and A. H. Gandomi, “Optimization of routing-based clustering approaches in wireless sensor network: Review and open research issues,” Electronics, vol. 9, pp. 1630, 2020. [Google Scholar]
43. S. Palanisamy, S. Sankar, R. Somula and G. G. Deverajan, “Communication trust and energy-aware routing protocol for wsn using d-s theory,” International Journal of Grid and High Performance Computing (IJGHPC), vol. 13, no. 4, pp. 24–36, 2021. [Google Scholar]
44. J. Tian, L. Han and K. Rothermel, “Spatially aware packet routing for mobile ad hoc inter-vehicle radio networks,” IEEE Intelligent Transportation Systems Proceedings, vol. 2, pp. 1546–1551, 2003. [Google Scholar]
45. J. R. Martín, R. P. Leal and J. N. Marco, “Towards 5G: Techno-economic analysis of suitable use cases,” Netnomics, vol. 20, pp. 153–175, 2019. [Google Scholar]
46. Y. Kishiyama, A. Benjebbour, H. Ishii and T. Nakamura, “Evolution concept and candidate technologies for future steps of lte-a,” in IEEE Int. Conf. on Communication Systems (ICCS), Singapore, pp. 473–477, 2012. [Google Scholar]
47. N. Noorani and S. A. H. Seno, “SDN-and fog computing-based switchable routing using path stability estimation for vehicular ad hoc networks,” Peer-to-Peer Networking and Applications, vol. 13, pp. 948–964, 2020. [Google Scholar]
48. L. Krishnasamy, R. K. Dhanaraj, G. G. Deverajan, G. T. Reddy, M. K. Aboudaif et al., “A heuristic angular clustering framework for secured statistical data aggregation in sensor networks,” Sensors, vol. 20, no. 17, pp. 1–15, 2020. [Google Scholar]
49. R. Charles and P. Balasubramanian, “VTD protocol: A cluster based trust model for secure communication in vanet,” International Journal of Intelligent Engineering and Systems, vol. 13, pp. 35–45, 2020. [Google Scholar]
50. V. Jain, R. S. Kushwah and R. S. Tomar, “Named data network using trust function for securing vehicular ad hoc network,” Proceeding of Soft Computing: Theories and Applications, SoCRA2017, pp. 463–471, 2019. [Google Scholar]
51. H. Xia, S. S. Zhang, B. X. Li, L. Li and X. G. Cheng, “Towards a novel trust-based multicast routing for VANET,” Security and Communication Networks, vol. 2018, no. 1, pp. 1–12, 2018. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |