DOI:10.32604/cmc.2022.025202
| Computers, Materials & Continua DOI:10.32604/cmc.2022.025202 | |
| Article |
Improved Archimedes Optimization Algorithm with Deep Learning Empowered Fall Detection System
1Department of Information Systems, College of Computer and Information Sciences, Princess Nourah bint Abdulrahman University, P.O.Box 84428, Riyadh, 11671, Saudi Arabia
2Department of Computer Engineering, College of Computers and Information Technology, Taif University, P.O. Box 11099, Taif, 21944, Saudi Arabia
3Department of Computer Science, College of Science & Arts at Mahayil, King Khalid University, Muhayel Aseer, 62529, Saudi Arabia
4Faculty of Computer and IT, Sana'a University, Sana'a, 61101, Yemen
5Department of Computer and Self Development, Preparatory Year Deanship, Prince Sattam bin Abdulaziz University, Al-Kharj, 16278, Saudi Arabia
*Corresponding Author: Manar Ahmed Hamza. Email: ma.hamza@psau.edu.sa
Received: 16 November 2021; Accepted: 30 December 2021
Abstract: Human fall detection (FD) acts as an important part in creating sensor based alarm system, enabling physical therapists to minimize the effect of fall events and save human lives. Generally, elderly people suffer from several diseases, and fall action is a common situation which can occur at any time. In this view, this paper presents an Improved Archimedes Optimization Algorithm with Deep Learning Empowered Fall Detection (IAOA-DLFD) model to identify the fall/non-fall events. The proposed IAOA-DLFD technique comprises different levels of pre-processing to improve the input image quality. Besides, the IAOA with Capsule Network based feature extractor is derived to produce an optimal set of feature vectors. In addition, the IAOA uses to significantly boost the overall FD performance by optimal choice of CapsNet hyperparameters. Lastly, radial basis function (RBF) network is applied for determining the proper class labels of the test images. To showcase the enhanced performance of the IAOA-DLFD technique, a wide range of experiments are executed and the outcomes stated the enhanced detection outcome of the IAOA-DLFD approach over the recent methods with the accuracy of 0.997.
Keywords: Fall detection; intelligent model; deep learning; archimedesoptimization algorithm; capsule network
Aging is one of the common problems associated with our life expectancy. The World Health Organization (WHO) says that aging people is 20% population of the world. Other reports say that elderly population (more than 65 years) will be increasing to 1.5 billion by 2050. Generally, older age decreases the overall sensory, physical, and cognitive functions. Thus, elderly people face difficulties in operating day to day activities like dressing up, walking, jogging, and eating [1]. Falling is one of the serious problems in old age people which could decrease their life expectancy. Consequently, it causes injury which could be frequently fatal. Also, Psychological grievances were described as the consequences of falls. People might suffer from depression, fear of falling, anxiety, and activity restriction [2]. The main physiological problem in elderly people is constraining their Activities of Daily Life (ADL), fear of falling. This fear result in activity restriction that leads to weakened muscle and inadequate gait balance which affect the independence and mobility of elderly people [3].
Advancements in signal processing and sensor technologies have become the basis for innovative fall detection (FD) and autonomous activity monitoring system [4]. Sensor information is gathered and processed with signal processing units to gather data regarding the position of the senior. This system comprises variety of sensors i.e., ambient (for example cameras, microphones) or wearable (for example smartwatches, Inertial Measurement Units (IMU) devices, smartphones). In this work, researchers focus more on the usage of IMU sensor which constitutes customized devices or is embedded in smart phones. This sensor belongs to the class of Microelectromechanical sensors (MEMS) which is made on a small scale, and the design integrates a portion which could physically move or vibrate.
In this study, we considered that these problems are approached from multiple perceptions [5]. For example, emphasize the use of the Machine Learning (ML) method employed to video audio processing, and image detection for detecting falls. Especially, we need to highlight that primary goal is the passive monitorization of dependent individuals in opposition to common (and lesser efficient) active system based teleassistance, where the dependent should activate the necklace to request help [6]. This aim can be attained by a low-cost robot and the Wireless Sensor Network (WSN) deployment, caregiving services through a Web-based method or controlled by dependent family members. To attain an effective monitorization, this scheme's aim is to comprise a fall detecting based ML method, collecting the necessary information by means of a tri-axial accelerometer embedding within a bracelet or smartwatch wearied by the dependent people [7].
The major drawback of the traditional telecare system is the psychological rejection of the dependant to other devices could expose his/her dependency [8]. A workaround that is widely employed to offer smartwatches to the dependant, which doesn't have negative connotations and appears to be a regular watch. Those devices have become increasingly complex, involving various healthcare monitoring abilities. Amongst others, the more common are accelerometer, widely employed for monitoring daily tasks like sleep or walking, which is utilized for fall detection [9]. Furthermore, the smartwatch is placed often from the wrist, enabling the advancement of FD algorithms, since they utilize an identical relative posture regarding the body. Despite the comprehensive study about ML methods for fall detecting system, a major challenge faced by all researchers are the small quantity of accurate fall available data sets; appropriate training of ML algorithms needs massive number of information.
This paper presents an Improved Archimedes Optimization Algorithm with Deep Learning Empowered Fall Detection (IAOA-DLFD) model to identify the fall/non-fall events. The proposed IAOA-DLFD technique comprises different levels of pre-processing to improve the input image quality. Besides, the IAOA with Capsule Network (CapsNet) based feature extractor is derived to produce an optimal set of feature vectors. In addition, the IAOA uses to significantly boost the overall FD efficiency by optimal choice of CapsNet hyperparameters. Lastly, radial basis function (RBF) network was applied for determining the proper class label of the test images. For investigating the improved outcomes of the IAOA-DLFD technique, a series of simulations were performed on benchmark dataset.
Ramirez et al. [10] described the winning technique advanced for Multimodal Fall Detection competition. It can be multiple-sensor data-fusion ML technique which identifies falls and human activities via five wearable inertial sensors: gyroscopes and accelerometers. To effectively adapt the methodology to the three test samples, they implemented unsupervised similarity searches—which detect the 3 common users to the 3 users in the test sample. Mrozek et al. [11] presented a scalable framework which is capable of monitoring fall detection and informing caregivers. The scalability test discloses the requirement to allow larger scaling operation. Furthermore, validate several ML methods for estimating the suitableness in the detection system.
Sangeetha et al. [12] presented a recurrent neural network (RNN) based architecture for the detection of daily or fall activities of a person who has neurological disorders and handle the person by concerning the physicians. When an abnormality is identified in the day-to-day activity it will inform family member or caregiver. The RNN based fall detecting method integrated knowledge from the wearable or smartphone and camera deployed on the ceiling and wall. Villaverde et al. [13] designed an open-source fall simulator which could recreate accelerometer fall samples of 2 standard kinds of fall: forward and syncope. This simulated sample is like real fall recorded by the real accelerometer for using them as input for ML application.
Soni et al. [14] presented the fall detecting system with ML method that subsequently employs a fog computing method to transmit data to the caregivers in real-time. Smartphone accelerometers are employed to collect the information and one class technique-based support vector machine (SVM) is employed for building fall detection. Then, consider 5 features from the Smartphone accelerometers to build fall detecting system. Nari et al. [15] goal is to face these problems by presenting a SaveMeNow.AI method, an advanced wearable device for detecting falls. SaveMeNow.AI technique is depending on the deployment of ML method for detecting falls which is embedded in it. This method uses information constantly evaluated by a 6-axis IMU existing within the device.
3 The Proposed Fall Detection Model
In this study, an effective IAOA-DLFD technique has been developed for fall detection and classification. The proposed IAOA-DLFD technique encompasses pre-processing, Capsule Network based Feature Extraction, IAOA based Hyperparameter tuning and RBF based Classification. Fig. 1 demonstrates the overall working process of IAOA-DLFD technique. The comprehensive working of these procedures is elaborated in the following sections.

Figure 1: Overall process of proposed IAOA-DLFD technique
In the initial step, the frame was pre-processed to increase the features of an image, elimination the noise objects, and enhance particular gets of features. At present, the frame was processed in 3 essential levels such as resize, augmentation, and normalized. For decreasing the computation cost, the resized frame takes place in 150 × 150. Simultaneously, the frame was augmentation in that the frame was different at each trained epochs. In order to augment the frame, several methods as rotation, zoom, height shift, width, and horizontal flip. Eventually, normalized approach has been executed for improving generalized of the method.
At the second stage, the CapsNet model is utilized to produce a collection of feature vectors. For overcoming the limitations of convolutional neural network (CNN) and generate it nearby the cerebral cortex action framework, Sabour et al. [16] presented a maximal dimension vector named as “capsule” for representing an entity (object/quantity of objects) by set of neurons before single neuron. The actions of neurons in active capsule signify many features of specifying entity which is projected from the image. All the capsules learned an implicit explanation of visual entities which output the possibility of entities and the group of “instantiated parameters containing the precise pose (orientation, place, and size), texture, deformation, albedo, velocity, hue, and so on.
The framework of CapsNet was distinct from other deep learning (DL) techniques. Fig. 2 illustrates the framework of CapsNet. The outcomes of input as well as output of CapsNets are vector, whose standard and way signify the existence probabilities and several attributes of entities correspondingly. A similar level of capsule is used for predicting the instantiation parameter of high level capsule with transformation matrix and, afterward, dynamic routing was implemented for making the forecast consistent. If several forecasts are consistent, the high level of 1 capsule was developed actively.

Figure 2: CapsNet architecture
An easy CapsNet framework was shallow with only 2 convolution layers (Convl, PrimaryCaps) and 1 fully connected (FC) layer (Entity- Caps). Especially, Convl has typical Conv layer that changes images to initial feature and outcomes to PrimaryCaps with Conv filter through a size of
Recall the original Equation, a capsule layer is separated into several computation units called capsules. Consider that the i capsule output activity vector
Let
In the equation,
Apparently, the capsule activation function essentially redistributes and suppresses vector length. Its output is employed by the likelihood of entity denoted as the capsule in the present class.
The overall loss function of original CapsNet has been weighted sum of reconstruction loss and marginal loss. The MSE was employed in the original recreation loss function that significantly degrade the method while processing noisy information.
3.3 Level III: IAOA Based Hyperparameter Tuning
At this stage, the hyperparameters of the CapsNet model are optimally tuned by the use of IAOA. AOA technique was simulated in the standard of Archimedes that assumed as law of physics. The Archimedes rule was involved in the object that was partial or complete immersed from the fluids. Because it can upward force (named as buoyancy) created in the liquid on the body, this force was equivalent to fluid weight moved in the body. In AOA, the immersed object was assumed that the population individual (candidate solution) [18]. This method starts with initializing a population with objects, also the place of all objects is initialization from arbitrary method from the issue search space. Next, the equivalent fitness function (FF) was computed. In the iteration procedure, AOA upgrades the object density as well as volume but its acceleration was upgraded on the fundamental of its collision with neighbor objects. The initialized procedure of every object was implemented utilizing the subsequent equation:
where
where
The primary FF was computed and object with optimum fitness has allocated as
The upgrading procedure of
where t implies the present iterative and
The equation of transfer function was expressed as:
where
The value of
where
where
where l and u imply the normalized ranges, it can be allocated as 0.1 and 0.9 correspondingly. If the object is distant in the global optimum, the value of accelerations is maximum, during this study exploration stage has shown else exploitation step was projected.
The place of
Conversely, the upgrade method of particle places under the exploitation stage was projected as:
where
where the value of P has been allocated arbitrarily by user. Lastly, the FF was calculated at the upgraded particle places and afterward, the optimum solutions are recorded.
Some meta-heuristic techniques obtainable still date undergoes premature convergence or are ineffective for attaining global optimum in few cases. Therefore, improving the exploration abilities of present AOA is castoff the mutation operators [20]. It supports balanced motion from present and opposite direction with minimum and maximum mutations according to the optimal position. The normal distributed mutations process has beneficial. The normally distributed mutation produces a single mutant as represented in Eq. (17).
where
where
3.4 Level IV: RBF Network Based Classification
Finally, the RBF network is utilized as a classification model to allot proper class labels to it. RBF network comprises output, input, and hidden layers. The network is feed-forward network. The functionality of the input layer is similar to other networks that are to take inputs and provide outputs, the main distinction for other networks lies in the functioning of hidden layer. During this method, the hidden layer comprises a certain activation function called RBF. The RBF is named to be certain classes of linear function which have a unique feature, where the response increases/reduces monotonically with distance from a centre point. The hidden layer was accountable for performing nonlinear conversion of output and input layer carries out linear regression to predict the output. RBF is distinct from another network which has many hidden layers active at a time. Multiquadric RBF has the properties of monotonically increasing with the distance from the centre and a Gaussian RBF have the properties of monotonically decreasing with distance from the centre.
The experimental validation of the IAOA-DLFD technique can be validated using URFD (URFD) [21] and Multiple Cameras Fall (MCF) [22] datasets. The MCF dataset comprises 192 videos including 96 fall and 96 indoor activities. In addition, the URFD dataset includes frontal and overhead video sequences with 314 and 302 frontal and overhead sequences respectively.
A brief examination of the IAOA-DLFD technique under training dataset (TD), testing dataset (TSD), and validation dataset (VD) on MCF dataset is given in Tab. 1 and Fig. 3. The outcomes show that the IAOA-DLFD technique has offered enhanced fall detection outcomes on all data. For instance, with TD, the IAOA-DLFD technique has resulted to


Figure 3: Result analysis of IAOA-DLFD technique on MCF dataset
Fig. 4 demonstrates the ROC analysis of the IAOA-DLFD technique on the test MCF dataset. The figure revealed that the IAOA-DLFD technique has gained enhanced outcome with the maximum ROC of 99.9995.
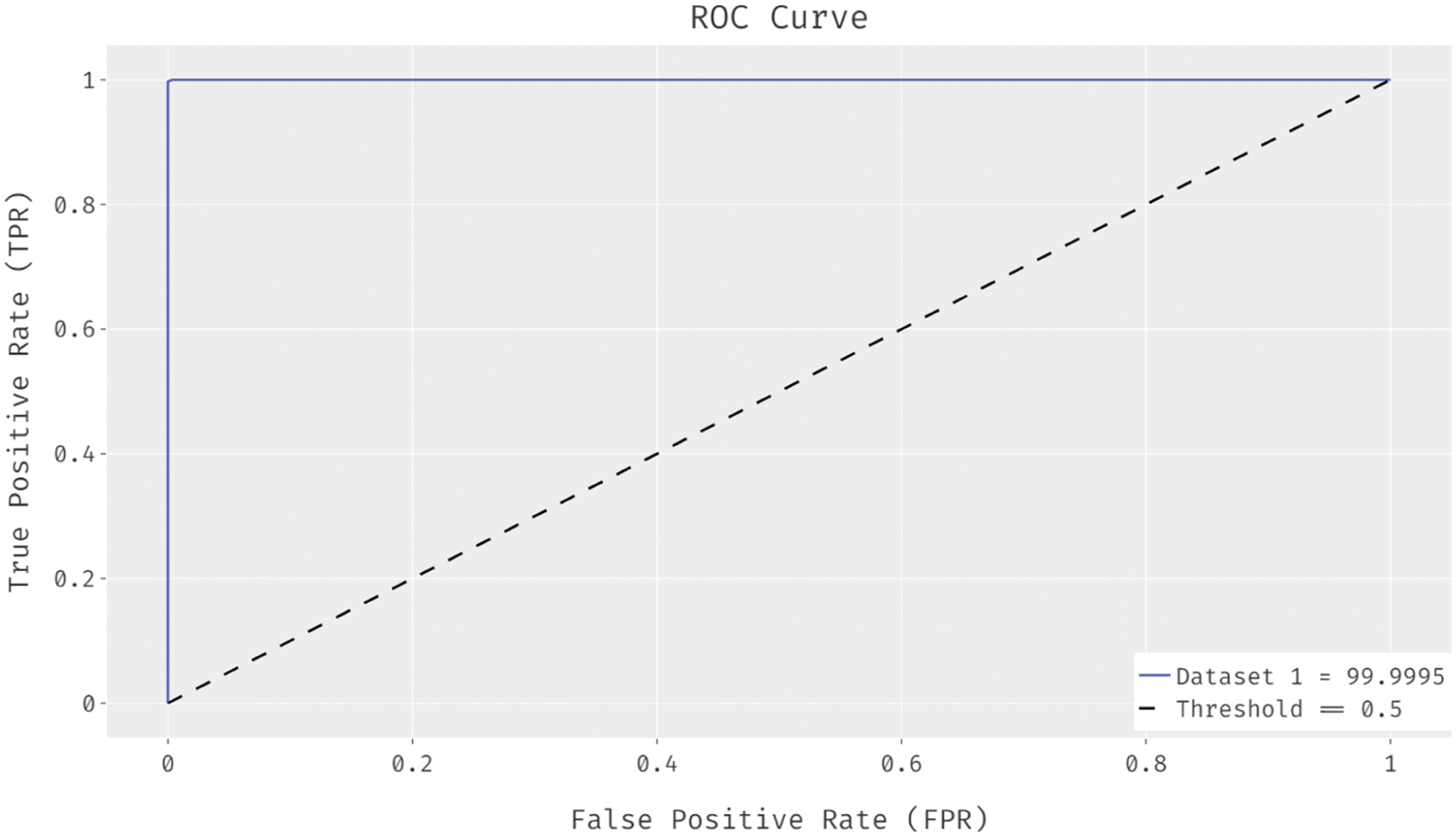
Figure 4: ROC graph of AOA-DLFD technique on MCF dataset
A detailed examination of the IAOA-DLFD approach under TD, TSD, and VD on URFD dataset are offered in Tab. 2 and Fig. 5. The outcomes demonstrated that the IAOA-DLFD method has obtainable improved fall detection outcomes on all data. For sample, with TD, the IAOA-DLFD method has resulted to

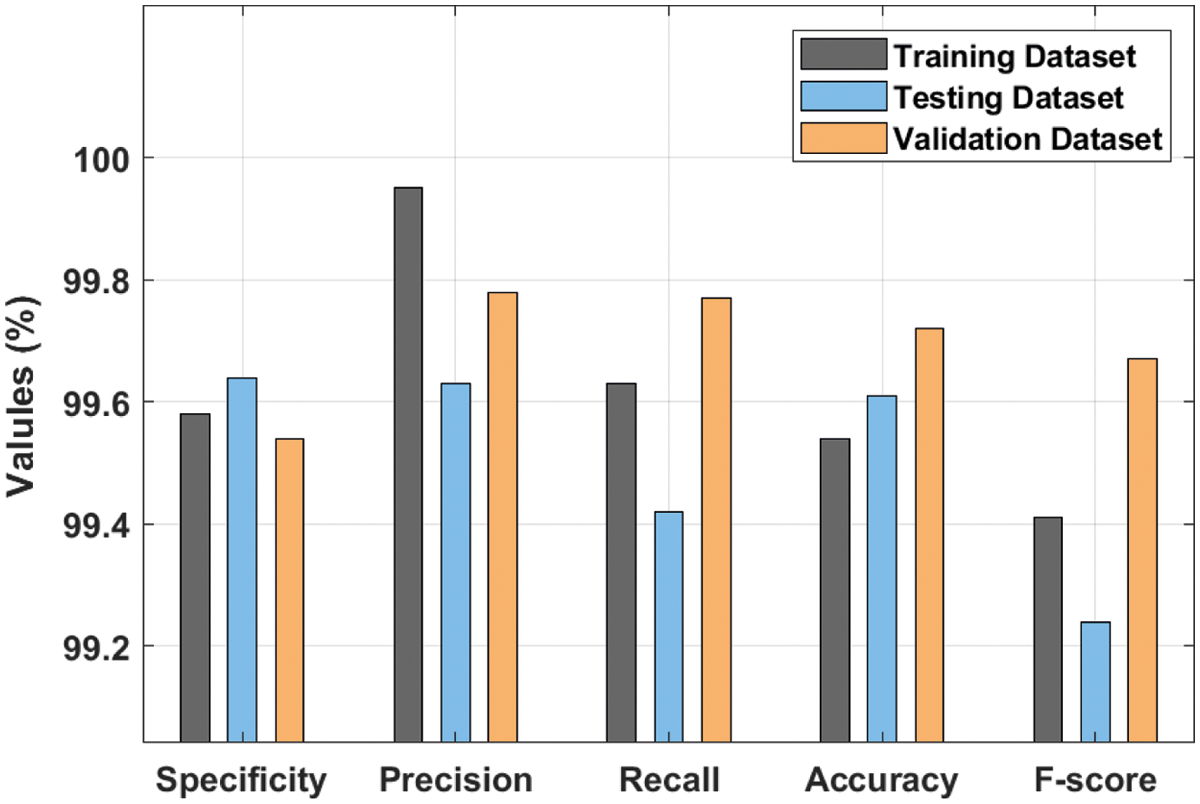
Figure 5: Result analysis of IAOA-DLFD technique on URFD dataset
Fig. 6 depicts the ROC analysis of the IAOA-DLFD manner on the test URFD dataset. The figure exposed that the IAOA-DLFD technique has attained improved outcomes with the maximal receiver operating characteristic (ROC) of 99.9982.

Figure 6: ROC graph of AOA-DLFD technique on URFD dataset
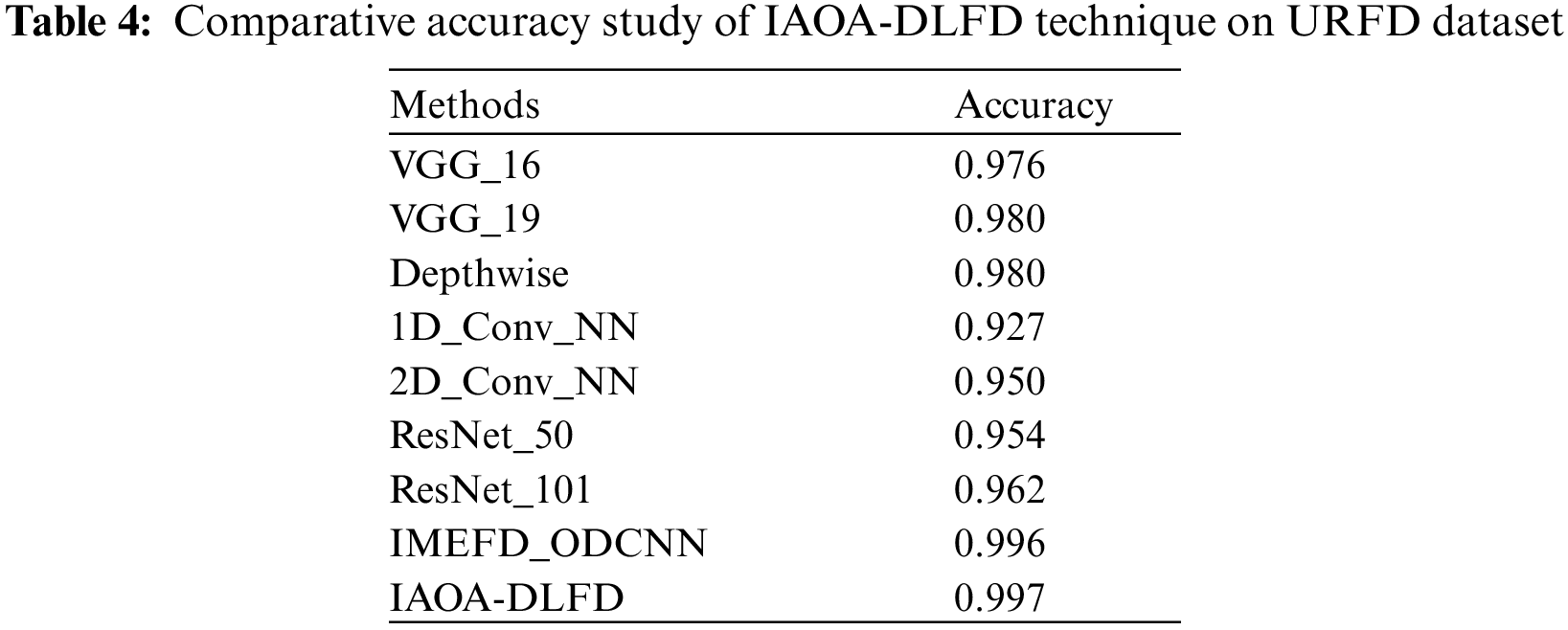
A comparative

A comparative
The time complexity analysis of the IAOA-DLFD technique on the MCF dataset interms of training time (TT), testing time (TST), and validation time (VT) is shown in Tab. 5 and Fig. 7. The results show that the VGG_16 and VG_19 manners have shown ineffective outcomes with the maximum time complexity. At the same time, the Depthwise, 1D_Conv_NN, and 2D_Conv_NN approaches have obtained moderately reduced time complexity. Moreover, the ResNet_50 and ResNet_101 systems have attained reasonably low time complexity. However, the presented IAOA-DLFD technique has resulted in improved outcomes with the least TT, TST, and VT of 18.949, 12.257, and 14.498 min respectively.

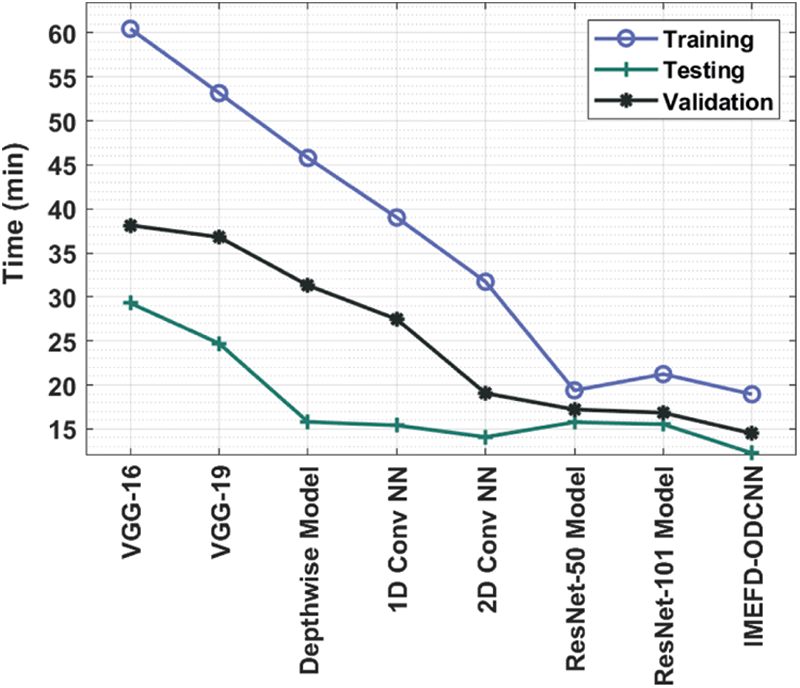
Figure 7: Time complexity analysis of IAOA-DLFD approach in MCF dataset
The time complexity analysis of the IAOA-DLFD system on the URFD dataset with respect to TT, TST, and VT is illustrated in Tab. 6 and Fig. 8. The outcomes exhibited that the VGG_16 and VG_19 manners have outperformed ineffective outcomes with the higher time complexity. Likewise, the Depthwise, 1D_Conv_NN, and 2D_Conv_NN models have obtained moderately minimum time complexity. In addition, the ResNet_50 and ResNet_101 methods have attained reasonably low time complexity. Eventually, the presented IAOA-DLFD approach has resulted in enhanced outcomes with the worse TT, TST, and VT of 16.900, 11.290, and 13.995 min correspondingly. From the above mentioned results analysis, the IAOA-DLFD technique can be utilized as a novel tool to FD and classification.


Figure 8: Time complexity analysis of IAOA-DLFD approach in URFD dataset
In this study, an effective IAOA-DLFD technique has been developed to FD and classification. The proposed IAOA-DLFD technique encompasses pre-processing, capsule network based feature extraction, IAOA based hyperparameter tuning, and RBF based classification. In addition, the IAOA uses for significantly boost the overall FD performance by optimal choice of CapsNet hyperparameters. In order to showcase the enhanced performance of the IAOA-DLFD technique, a wide range of experiments are implemented and the outcomes stated the enhanced detection outcome of the IAOA-DLFD technique over the recent methods under several aspects. Therefore, the IAOA-DLFD technique can be utilized as an effective tool for fall detection and classification. As a part of future scope, multimodal fusion models can be developed to boost fall detection outcomes.
Funding Statement: This work was supported by Taif University Researchers Supporting Program (Project Number: TURSP-2020/195), Taif University, Saudi Arabia. The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work under Grant Number (RGP 2/209/42). Princess Nourah bint Abdulrahman University Researchers Supporting Project Number (PNURSP2022R234), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. A. Bhattacharya and R. Vaughan, “Deep learning radar design for breathing and fall detection,” IEEE Sensors Journal, vol. 20, no. 9, pp. 5072–5085, 2020. [Google Scholar]
2. N. Thakur and C. Y. Han, “A study of fall detection in assisted living: Identifying and improving the optimal machine learning method,” JSAN, vol. 10, no. 3, pp. 39, 2021. [Google Scholar]
3. I. Sreenidhi, “Real-time human fall detection and emotion recognition using embedded device and deep learning,” International Journal of Emerging Trends in Engineering Research, vol. 8, no. 3, pp. 780–786, 2020. [Google Scholar]
4. Y. M. Galvão, J. Ferreira, V. A. Albuquerque, P. Barros and B. J. T. Fernandes, “A multimodal approach using deep learning for fall detection,” Expert Systems with Applications, vol. 168, pp. 114226, 2021. [Google Scholar]
5. A. Sultana, K. Deb, P. K. Dhar and T. Koshiba, “Classification of indoor human fall events using deep learning,” Entropy, vol. 23, no. 3, pp. 328, 2021. [Google Scholar]
6. F. S. Khan, M. N. H. Mohd, D. M. Soomro, S. Bagchi and M. D. Khan, “3D hand gestures segmentation and optimized classification using deep learning,” IEEE Access, vol. 9, pp. 131614–131624, 2021. [Google Scholar]
7. E. Torti, A. Fontanella, M. Musci, N. Blago, D. Pau et al., “Embedded real-time fall detection with deep learning on wearable devices,” in 2018 21st Euromicro Conf. on Digital System Design (DSD), Prague, Czech Republic, pp. 405–412, 2018. [Google Scholar]
8. T. Mauldin, M. Canby, V. Metsis, A. Ngu and C. Rivera, “SmartFall: A smartwatch-based fall detection system using deep learning,” Sensors, vol. 18, no. 10, pp. 3363, 2018. [Google Scholar]
9. T. Vaiyapuri, E. L. Lydia, M. Y. Sikkandar, V. G. Diaz, I. V. Pustokhina et al., “Internet of things and deep learning enabled elderly fall detection model for smart homecare,” IEEE Access, vol. 9, pp. 113879–113888, 2021. [Google Scholar]
10. H. Ramirez, S. A. Velastin, I. Meza, E. Fabregas, D. Makris et al., “Fall detection and activity recognition using human skeleton features,” IEEE Access, vol. 9, pp. 33532–33542, 2021. [Google Scholar]
11. D. Mrozek, A. Koczur and B. M. Mrozek, “Fall detection in older adults with mobile IoT devices and machine learning in the cloud and on the edge,” Information Sciences, vol. 537, pp. 132–147, 2020. [Google Scholar]
12. D. P. Sangeetha, “Fall detection for elderly people using video-based analysis,” Journal of Advanced Research in Dynamical and Control Systems, vol. 12, no. SP7, pp. 232–239, 2020. [Google Scholar]
13. A. C. Villaverde, M. Cobos, P. Muñoz and D. F. Barrero, “A simulator to support machine learning-based wearable fall detection systems,” Electronics, vol. 9, no. 11, pp. 1831, 2020. [Google Scholar]
14. M. Soni, S. Chauhan, B. Bajpai and T. Puri, “An approach to enhance fall detection using machine learning classifier,” in 2020 12th Int. Conf. on Computational Intelligence and Communication Networks (CICN), Bhimtal, India, pp. 229–233, 2020. [Google Scholar]
15. M. I. Nari, S. S. Suprapto, I. H. Kusumah and W. Adiprawita, “A simple design of wearable device for fall detection with accelerometer and gyroscope,” in 2016 Int. Symp. on Electronics and Smart Devices (ISESD), Bandung, Indonesia, pp. 88–91, 2016. [Google Scholar]
16. S. Sabour, N. Frosst and G. Hinton, “Dynamic routing between capsules,” arXiv preprint arXiv:1710.09829, 2017. [Google Scholar]
17. F. Deng, S. Pu, X. Chen, Y. Shi, T. Yuan et al., “Hyperspectral image classification with capsule network using limited training samples,” Sensors, vol. 18, no. 9, pp. 3153, 2018. [Google Scholar]
18. F. A. Hashim, K. Hussain, E. H. Houssein, M. S. Mabrouk and W. Al-Atabany, “Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems,” Applied Intelligence, vol. 51, no. 3, pp. 1531–1551, 2021. [Google Scholar]
19. A. Fathy, A. Alharbi, S. Alshammari and H. Hasanien, “Archimedes optimization algorithm based maximum power point tracker for wind energy generation system,” Ain Shams Engineering Journal, vol. 14, pp. 1–14, 2021. https://doi.org/10.1016/j.asej.2021.06.032. [Google Scholar]
20. N. Panda and S. K. Majhi, “Oppositional salp swarm algorithm with mutation operator for global optimization and application in training higher order neural networks,” Multimedia Tools and Applications, vol. 80, 2021. https://doi.org/10.1007/s11042-020-10304-x. [Google Scholar]
21. Dataset: http://fenix.univ.rzeszow.pl/~mkepski/ds/uf.html. 2018. [Google Scholar]
22. Auvinet, C. Rougier, J. Meunier, A. S. Arnaud, J. Rousseau, “MCF dataset,” Technical Report 1350, DIRO-Université de Montréal, 2010. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |