DOI:10.32604/cmc.2022.029394
| Computers, Materials & Continua DOI:10.32604/cmc.2022.029394 | |
| Article |
Binary Tomography Reconstruction with Limited-Data by a Convex Level-Set Method
1Information and Systems, University of Tsukuba, Tsukuba, Ibaraki, 305-8573, Japan
2Department of Mathematics, Faculty of Science, Sohag University, Sohag, 82524, Egypt
*Corresponding Author: Haytham A. Ali. Email: haytham_ali@science.sohag.edu.eg
Received: 03 March 2022; Accepted: 20 April 2022
Abstract: This paper proposes a new level-set-based shape recovery approach that can be applied to a wide range of binary tomography reconstructions. In this technique, we derive generic evolution equations for shape reconstruction in terms of the underlying level-set parameters. We show that using the appropriate basis function to parameterize the level-set function results in an optimization problem with a small number of parameters, which overcomes many of the problems associated with the traditional level-set approach. More concretely, in this paper, we use Gaussian functions as a basis function placed at sparse grid points to represent the parametric level-set function and provide more flexibility in the binary representation of the reconstructed image. In addition, we suggest a convex optimization method that can overcome the problem of the local minimum of the cost function by successfully recovering the coefficients of the basis function. Finally, we illustrate the performance of the proposed method using synthetic images and real X-ray CT projection data. We show that the proposed reconstruction method compares favorably to various state-of-the-art reconstruction techniques for limited-data tomography, and it is also relatively stable in the presence of modest amounts of noise. Furthermore, the shape representation using a compact Gaussian radial basis function works well.
Keywords: Binary tomography; parametric level-set method; inverse problem; shape recovery; Gaussian function; convex optimization
Computed tomography (CT) is a non-invasive imaging technique that reconstructs images of non-accessible or non-visible objects from a set of projection data [1,2]. Computed tomography has a wide range of applications in diverse fields, such as medicine, science, industrial non-destructive testing, and electron tomography [3–8]. For many of these applications, it is extremely desirable to minimize the number of projections data measured for the object, because minimizing the amount of collected data leads to low-dose imaging and faster imaging. For example, in electron tomography, only a small number of projections, i.e., less than 100, are measured to limit the acquisition time and avoid damaging the sample [9].
Unfortunately, reducing the number of projection data results in artifacts in the reconstructed image. There exist two classes of reconstruction algorithms in CT. The first class of reconstruction algorithms, known as analytical reconstruction methods, such as Filtered Back Projection (FBP) [10], requires a large number of projection data acquired throughout the whole angular range to achieve acceptable reconstructions. The second class of algorithms is known as iterative reconstruction methods, such as the Simultaneous Iterative Reconstruction Technique (SIRT) [11], which allows for the incorporation of prior knowledge about the object into the reconstruction. Thanks to the use of prior knowledge, high-quality reconstructions may be achieved from a relatively small number of projection data or other limited projection data.
Recently, reconstruction algorithms using sparsity of magnitude of intensity gradient as prior knowledge have been used with the name of Total-Variation (TV) to handle sparse-view and limited-angle CT reconstruction [12]. Finally, to further improve image quality or reduce the number of necessary projection data, using the constraint that image intensity is binary has been investigated with the name of discrete (binary) tomography [13–15]. For example, Discrete Algebraic Reconstruction Technique (DART) algorithm for discrete tomography has been developed, which provides high-quality reconstructions with a very simple modification of Algebraic Reconstruction Technique (ART) method [16–18]. Despite the fact that DART or its variations have been effectively used for electron tomography [19,20], micro-CT [21,22], and magnetic resonance imaging (MRI) [23], the use of this technique in practical applications is still limited because it suffers from a longer computation time.
To reduce computing time or to increase reconstruction quality for a given computation time, we consider a parametric level-set function that may be defined using a collection of basic functions. This parametric level-set function is likely to behave well since there is no need for re-initialization, unlike the classical level-set method, and we can easily derive the corresponding evolution equation based on the underlying parameters. According to Kilmer et al. [24], the polynomial basis can be applied to diffuse optical tomography by expressing the level set function as a fixed-order polynomial, and it evolves by updating the polynomial coefficients at every iteration. Additionally, the parametric level-set functions have been used in applications related to image processing. In [25], Gelas et al. used compactly supported radial basis functions (RBFs) as a basis function to reduce the dimension of the problem through the parametric representation and computational cost due to the sparsity provided by this type of basis function. Moreover, Bernard et al. [26] parameterized the level-set function by using B-splines as the basis function.
In this paper, we propose a novel representation of the parametric level-set (PALS) for shape-based inverse problems. There are some similarities to the previous methods in our approach, such as the use of a basis function to represent the parametric level-set function [27]. However, we chose a different representation model, in which a Gaussian function is used as the basis function. Furthermore, unlike previous works that used basis functions to represent the parametric level-set, our representation has several advantages, including high accuracy, easy applicability to problems of a high dimension, and the intrinsic smoothness of Gaussian basis functions, which guarantees the smoothness of the solution.
Besides the above advantages, the proposed technique is based totally on convex optimization, so it has a consistent performance with a small number of projection data by solving the issue of the cost function’s local minimum. Moreover, the number of parameters in the level-set function is often far smaller than the number of image pixels. Finally, the results of numerical experiments with synthetic images and real X-ray CT projection data show that the proposed method compares favorably to other state-of-the-art reconstruction techniques, and that it is also relatively stable in the presence of modest amounts of noise.
This paper is organized as follows. First, we describe how to formulate the shape-based reconstruction problems in tomography dealt with in this paper. Second, we present the mathematical basis of the parametric level-set technique, and various practical issues are discussed. Then, we give the experimental results of our method for some examples and real data, comparing it to other possible reconstruction methods. Finally, we conclude the paper.
In this study, we consider the discrete tomography reconstruction problem, which may be expressed mathematically as follows. To begin, any image is defined on
where
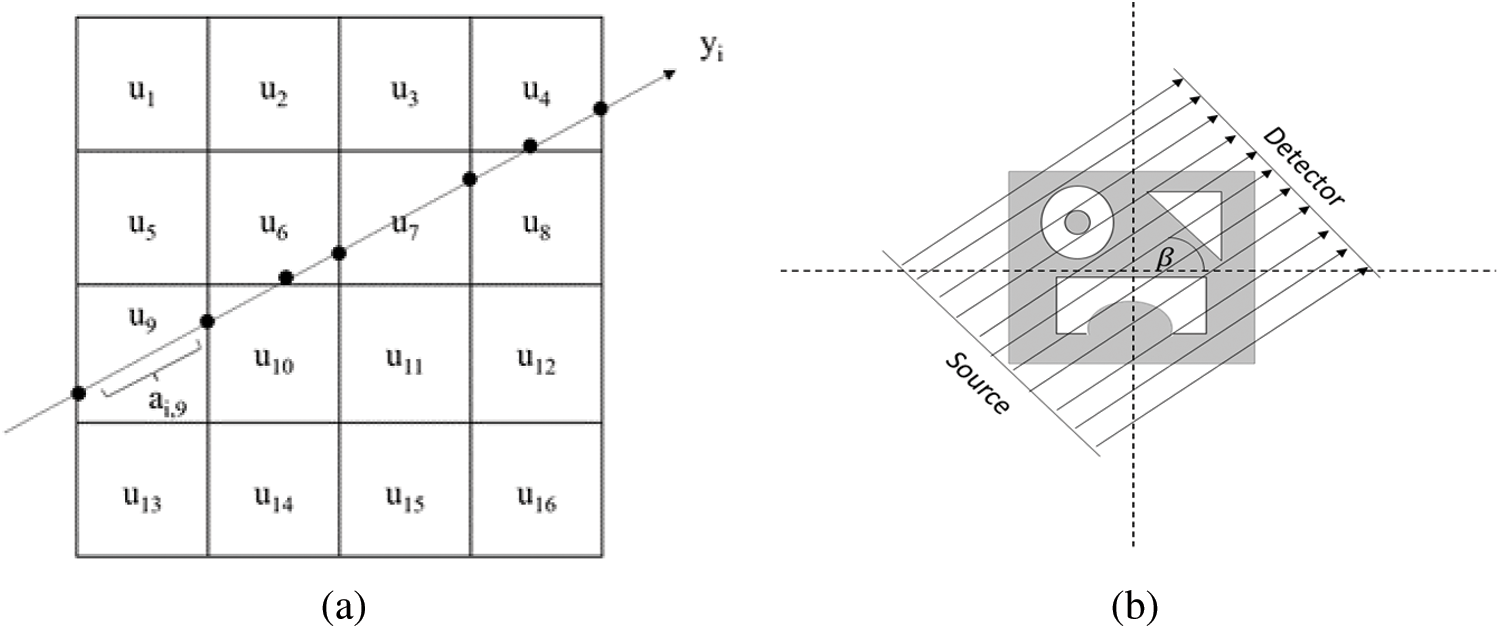
Figure 1: Mathematical model of discrete tomography. (a) Example of a projection value
The image reconstruction problem is an inverse problem in which the image u is recovered from the projection data y using the matrix A, i.e.,
In many cases of CT imaging, Eq. (1) is underdetermined because the number of measure projection data
For example, to solve this optimization problem, the following Newton-like algorithm can be used to find the image u [28].
where
3 Basic Principle of Level-Set Method
In the areas of geometric inverse problems, such as shape optimization, image segmentation, and interface tracking, level-set methods have received a lot of attention due to their ability to adapt to topological changes in the region structures. In [29], Sethian and Osher introduced the classical level-set methods for solving the Hamiltonian-Jacobi equation, which is also known as a level-set equation.
where
In a large class of shape-based inverse problems [31–33], the model of interest
where
where
By using Eq. (4), the indicator function can be represented as
In many existing shape-based approaches, the level-set function
where c is a positive small value. Now, we can say that for some specified α,
A PALS function is an example of a basis expansion using known basis functions and unknown weights. As a result of this statement, the level-set function
where N denotes the number of RBFs, and
where
4 Shape Representation and Algorithms
In this section, we describe the method for reconstructing the image using the parametric level-set and how it evolves when parameters
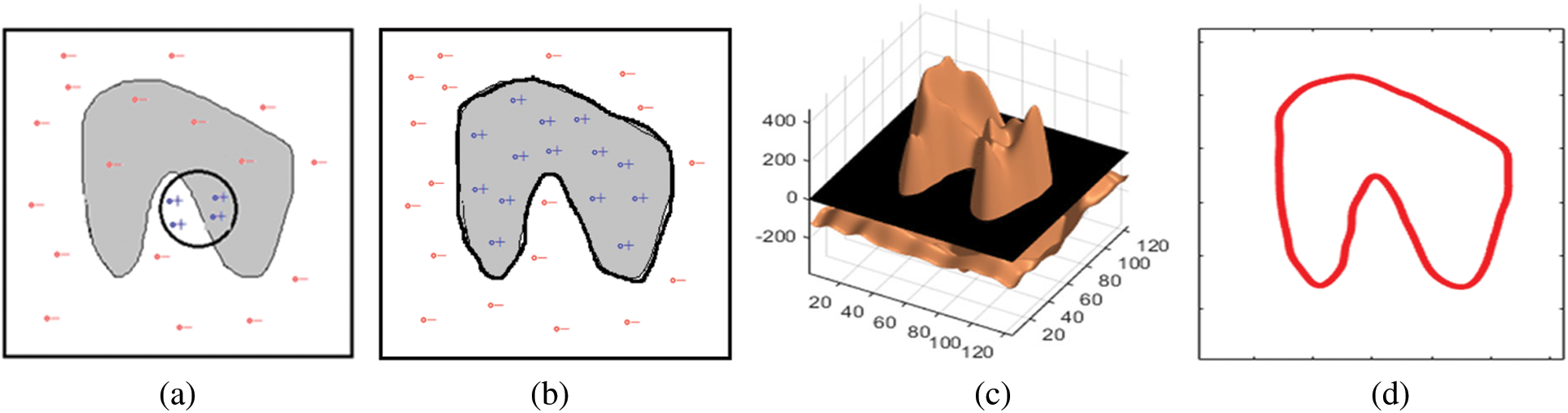
Figure 2: This figure shows an example of reconstruction using the parametric level-set functions by GRBFs. (a) The black contour is the resulting c-level set of the initial PALS function, and it is defined by a boundary between the region having positive, i.e.,
Next, we discuss how to select the Gaussian width parameter
where
To calculate the gradient of Eq. (10), taking the derivative of Eq. (7) with respect to
where
In Eq. (12), B is the matrix constructed by the basis vectors of GRBF, i.e., matrix converting the parameters
where the residual operator
In our implementation, we solve the minimization problem of Eq. (10) with respect to the level-set parameters
The final reconstruction algorithm is summarized in Algorithm below.
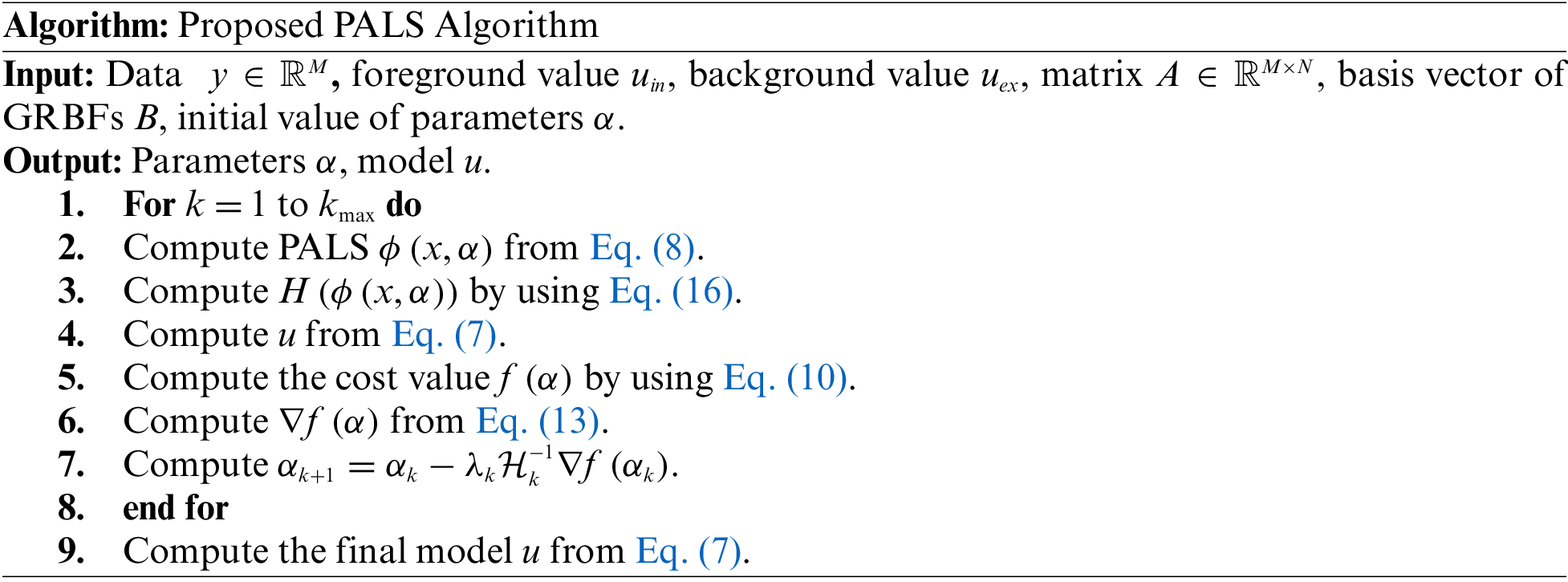
From Eq. (5), during the optimization process, we need to compute Heaviside function
However, Eq. (15) is not a good choice due to the following reason. Considering the nature of parametric level-set function, Eq. (7) shows that
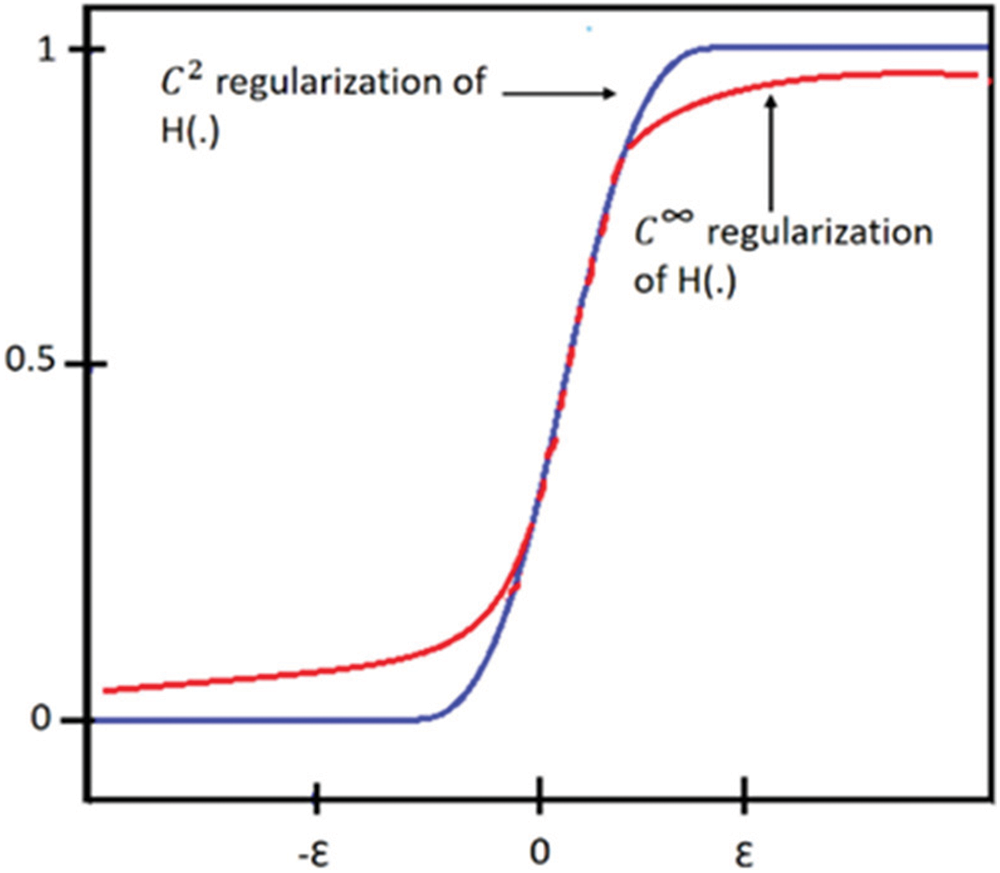
Figure 3: Comparison of two regularized versions of Heaviside function
A final remark on solving the under-determined inverse problems is as follows. Our original cost function to solve the under-determined CT reconstruction is the standard least-squares error of Eq. (2). In the setup of sparse-view CT and limited-angle CT, however, due to the lack of sufficient projection data, we normally need to include a regularization term into the cost function. In the proposed method, instead of using the regularization term, we have used the deterministic constraint that the image can be expressed by the simple model of Eq. (7). Since the dimension to represent the image in this model is essentially very small, it works similarly to the regularization. In this model-based approach, the detailed form of the cost function for image reconstruction cannot be explicitly written, unlike the case of using the regularization term.
In this section, we describe experimental results for image reconstruction in sparse-view CT and limited-angle CT. The experiments were performed by using synthetic images and real X-ray CT projection data of a carved cheese slice [41]. We compared the proposed method to some of the state-of-the-art reconstruction methods for binary tomography. In Section 5.1, we will discuss the details of the compared methods.
For the experiments with synthetic images, we used four images shown in Fig. 4. All these binary images consist of
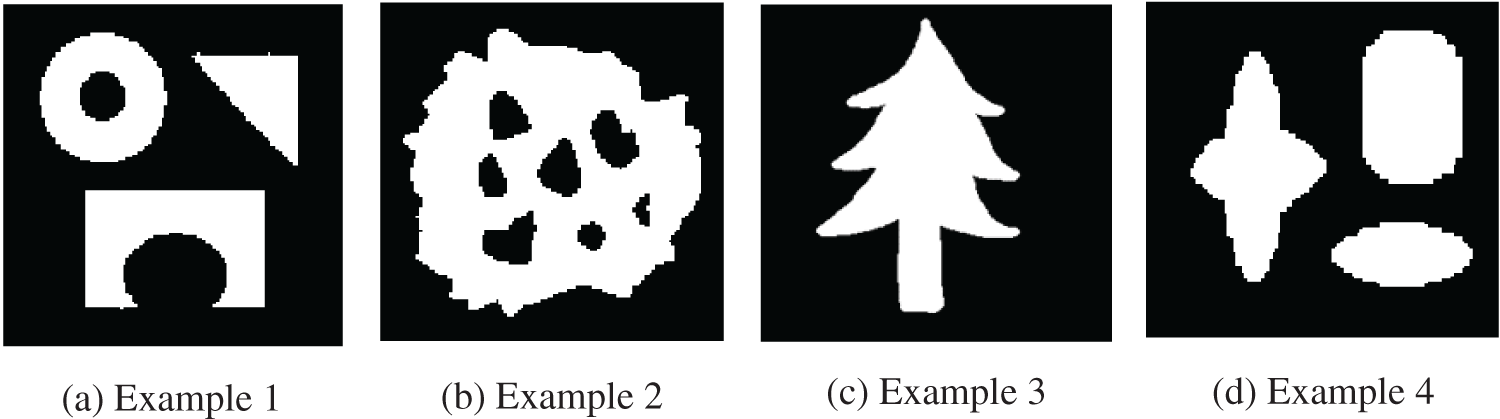
Figure 4: These four synthetic images were used to evaluate the performance of the proposed approach
5.1 Other Reconstruction Methods Used for Comparison
There are several reconstruction methods for tomography. We are focusing on the following four methods, which have been developed for binary tomography aiming at reconstructing nice images with limited projection data.
First: Total-variation (TV) method based on solving the following optimization problem.
Second: Dual Problem (DP) method proposed by Kadu and Van Leeuwen [43], which is based on solving the following so-called Largrangian dual problem.
where
Third: Batenburg and Sijbers proposed the Discrete Algebraic Reconstruction Technique (DART) in [16]. Although DART works well for a large class of binary images by exploiting the prior knowledge on gray levels in each region of the image, our proposed method is still better and can compare favorably with this method.
Fourth: The parametric level-set (PALS) representation proposed by Kadu et al. [27]. In their work, they used
where
In Fig. 5, we show reconstructed images for Example 1 when the number of projection data is 4. From the results, the proposed method provided an image that is very close to the ground truth compared to the other methods.
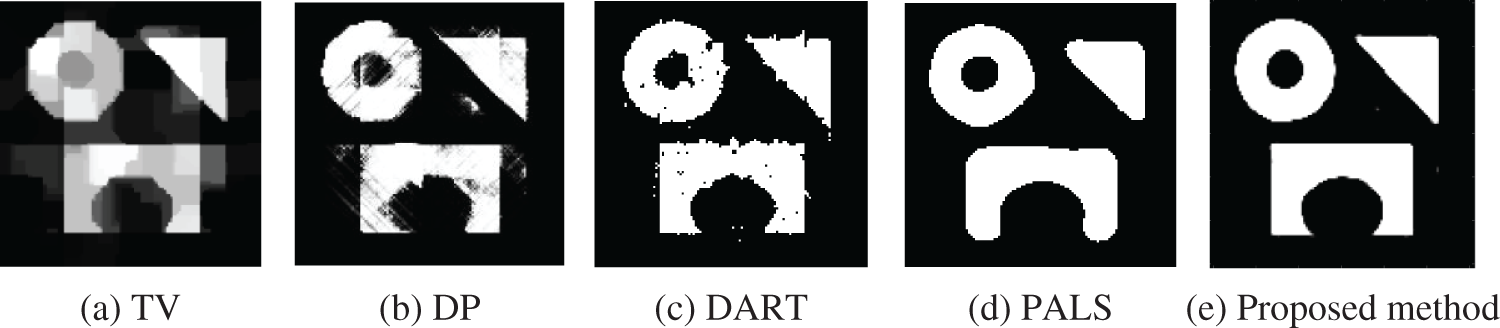
Figure 5: Reconstructed images from only
Fig. 6 shows the performance of our proposed method when the number of projection data is changed between
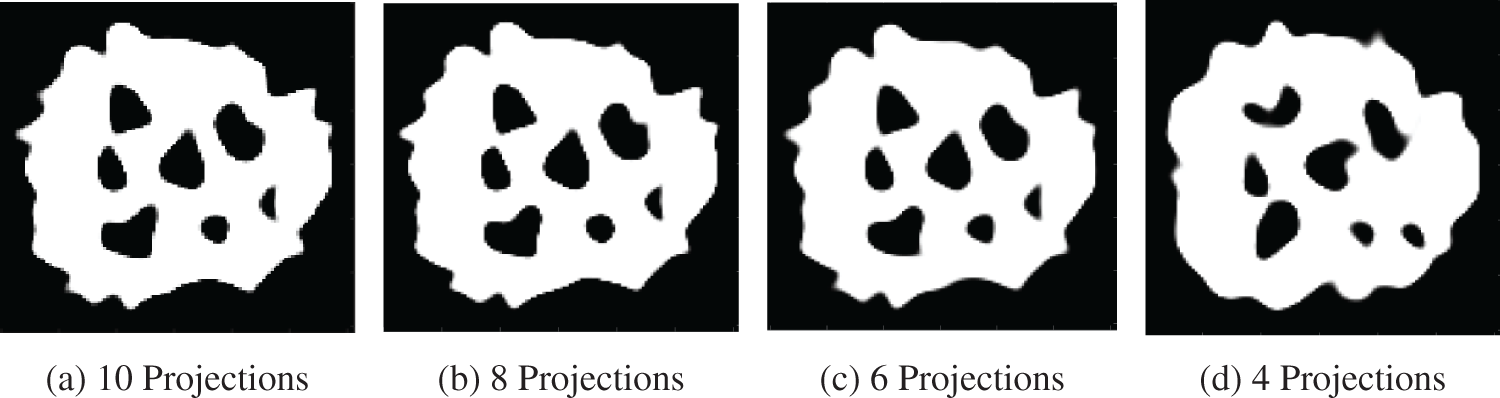
Figure 6: Reconstructed images for Example 2. The number of projection data was changed between
In addition to the synthetic images, we applied the proposed method to real X-ray CT projection data of a carved cheese slice [41]. In Fig. 7, we show the measured sinogram and the corresponding Filtered Back Projection (FBP) reconstruction from
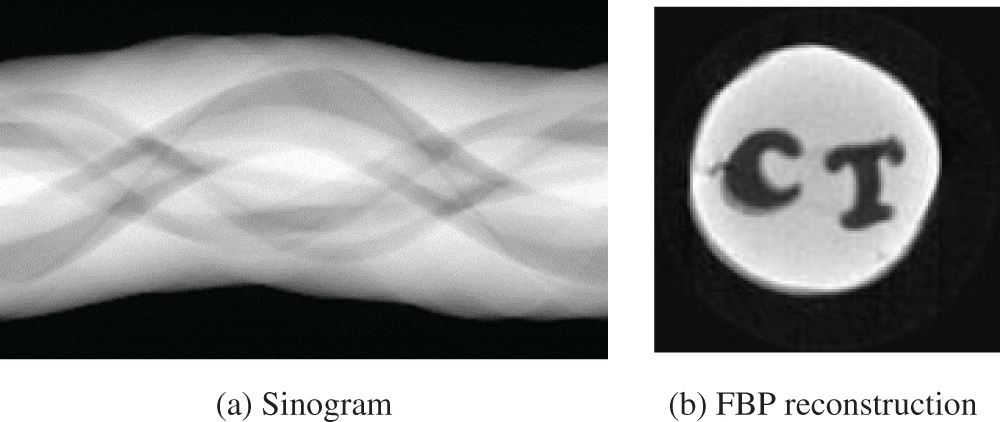
Figure 7: Sinogram and a reconstructed image of the carved cheese real data. The number of projection data was
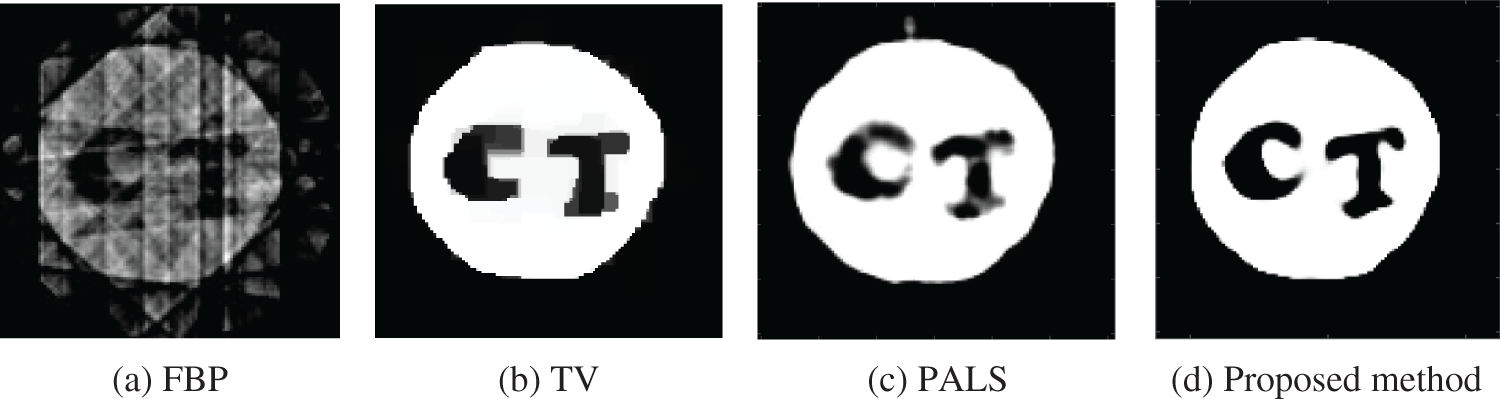
Figure 8: Reconstructed images for the carved cheese real data from only
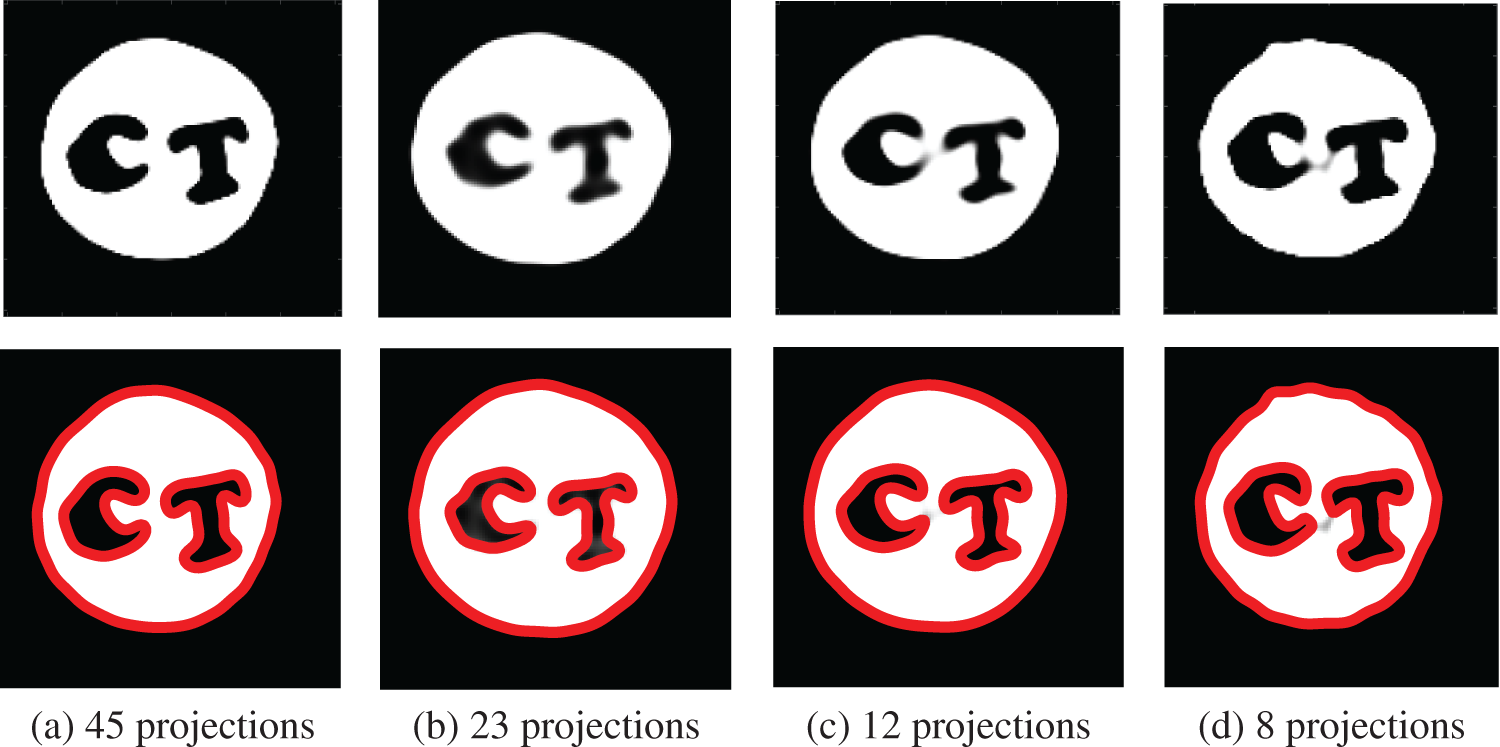
Figure 9: Reconstructed images from sparse-view projection data by the proposed method for the carved cheese real data. The red contours represent the reconstructed boundary of object
In the case of limited-angle CT, the problem becomes much more difficult, but the proposed method still works well, and the reconstructed images were very close to the true images. For example, Fig. 10 shows the images by the proposed method and the other reconstruction methods for Example 3. In this experiment, the number of projection data was only
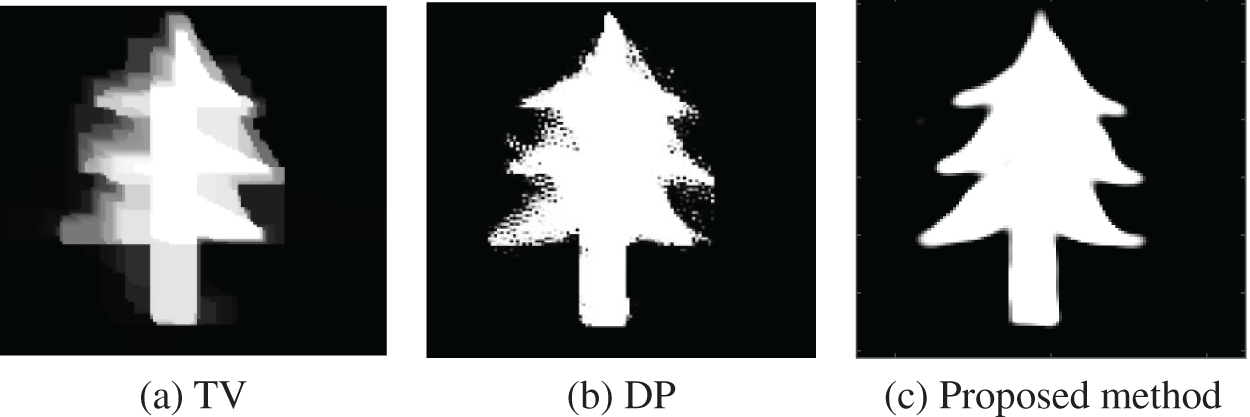
Figure 10: Reconstructed images from only
In Fig. 11, we show how reconstructions by the proposed method vary by decreasing the angular range for Example 4. In CT fields, it is well-known for a long time that it is difficult to reconstruct images with sufficient accuracy from limited-angle projection data. However, as shown in Fig. 11, we could reconstruct almost correct images even when the angular range was
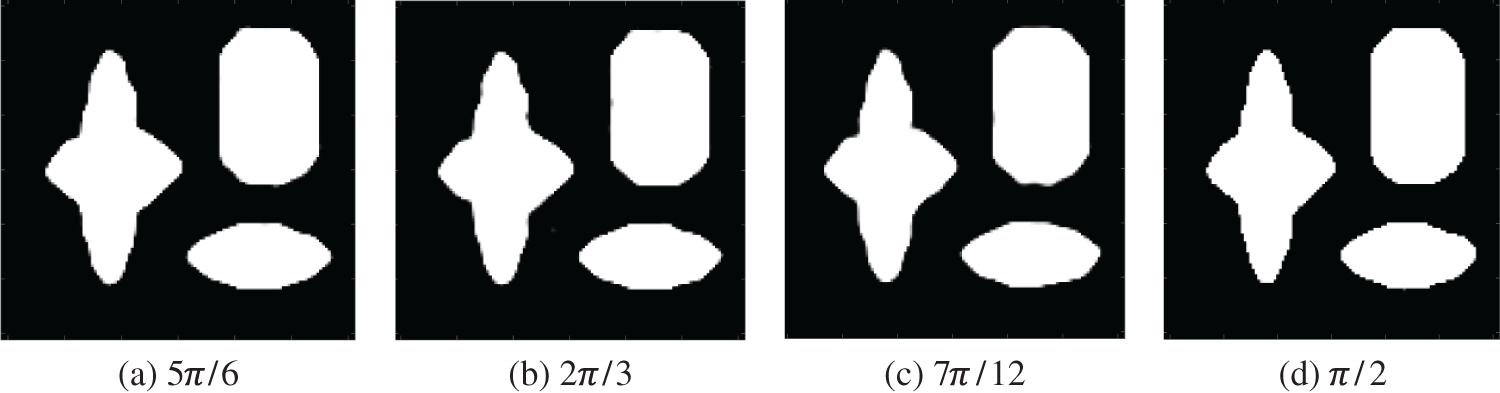
Figure 11: Reconstructed images for Example 4 in the limited-angle CT case. The number of projection data was
For the real data, in Figs.12 and 13, we show reconstructed images by the proposed method when the angular range was limited to
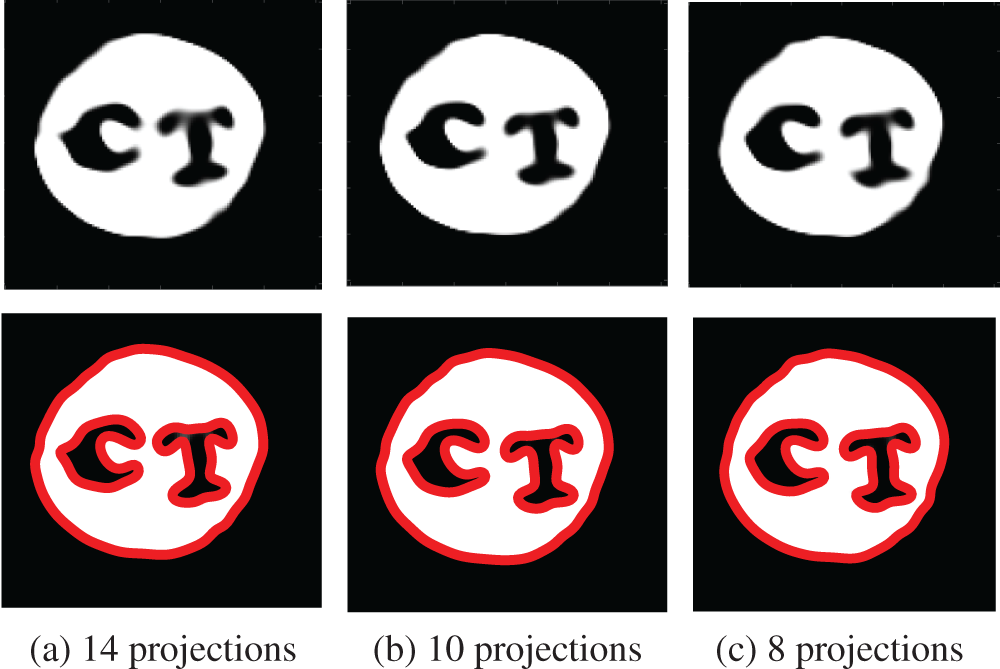
Figure 12: Reconstructed images for the carved cheese real data in the limited-angle case. The angular range to measure the projection data was set to
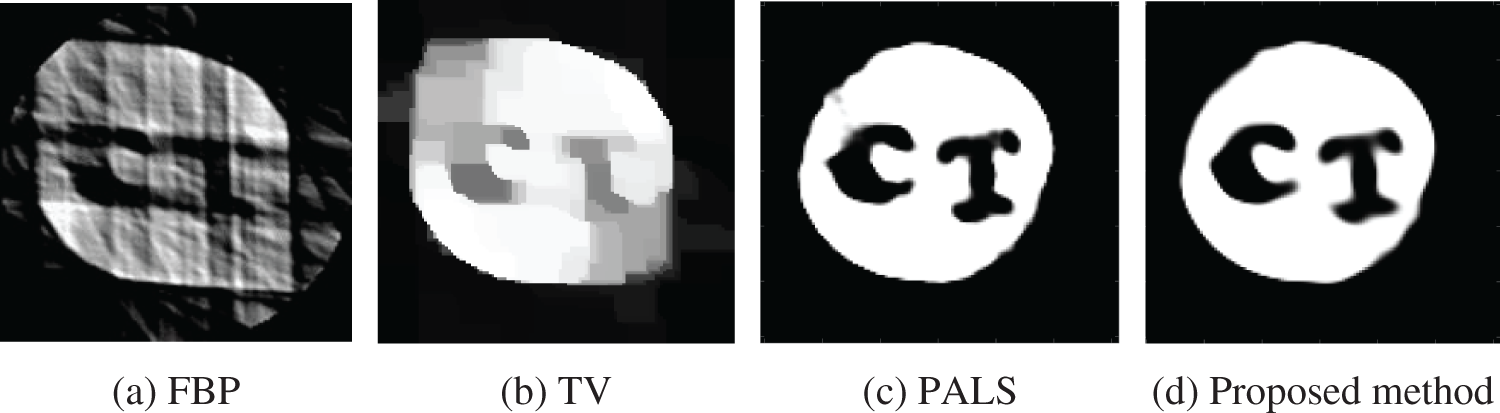
Figure 13: Reconstructed image for the real data from only
5.4 Evaluation of Effect of Noise
We evaluated the performance of the proposed method in the presence of three different levels of noise in the projection data. We added Gaussian noise with ratio 0.1%, 5%, and 10% to the projection data, from which image reconstruction was performed. In Fig. 14, we show reconstructed images for Example 1 and Example 2. We observe that the proposed method is stable in the presence of modest amounts of noise but degrades gradually as the noise level increases.
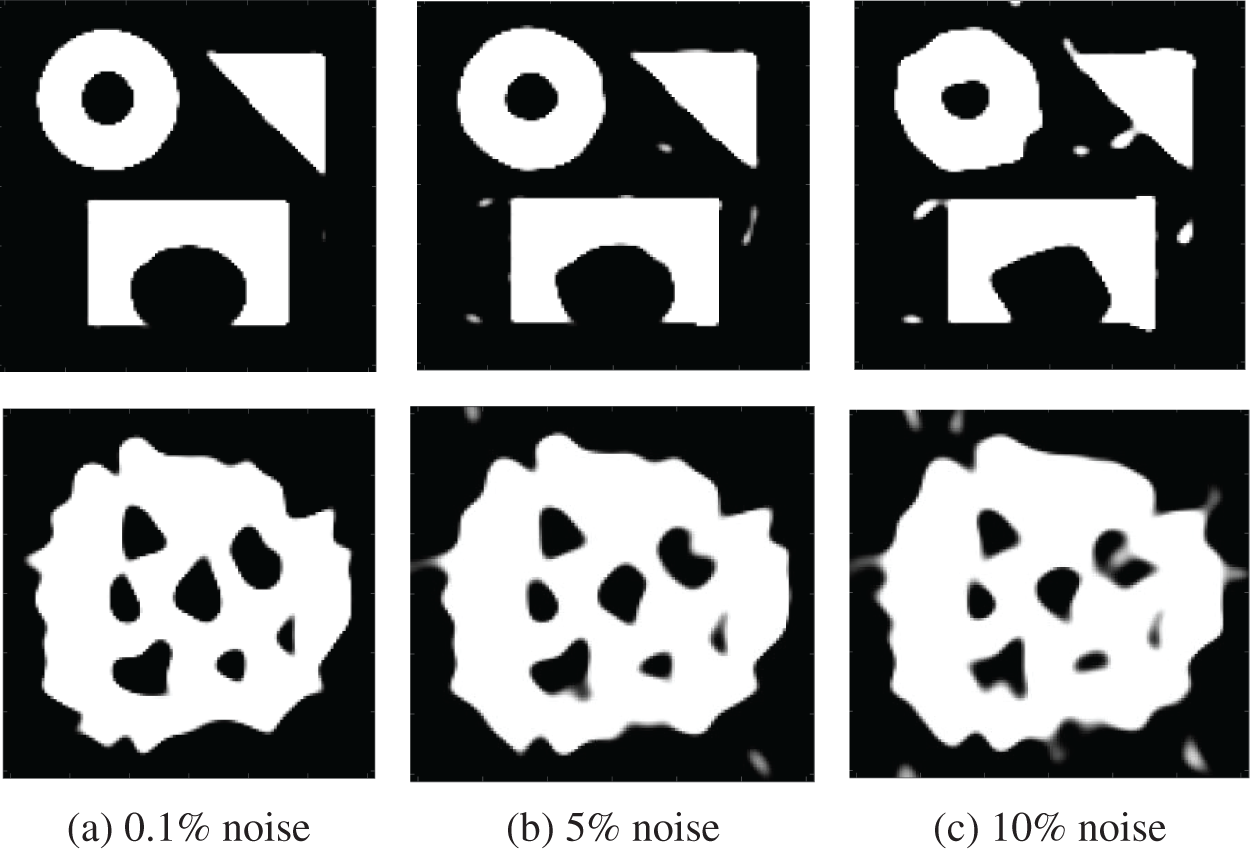
Figure 14: Reconstructed images for Example 1 and Example 2 when the projection data contains noise, where the ratio of noise was set to 0.1%, 5%, and 10%
In this paper, we proposed a novel approach using a parametric level-set method for image reconstruction in binary tomography. The basic formulation of the problem is summarized as follows. Shapes of objects are represented via a level-set function, which is represented by using a Gaussian radial basis function (GRBF). We are using an appropriate parametrization of the level-set function, which can reduce the problem dimension and essentially regularizes the problem in a successful way. Based on this modeling, the level-set function is more likely to behave well, so it doesn’t need re-initialization like the traditional methods. Furthermore, unlike the use of traditional level-set methods, the problem to be solved for image reconstruction becomes a tractable convex optimization. We solved the optimization problem using a Newton-type method because the number of underlying parameters in a parametric level-set approach is usually much smaller than the number of pixels that we finally would like to get the image by discretizing the level-set function. We tested the proposed method on synthetic images and real data. According to our experiments, the proposed approach compares favorably with some state-of-the-art reconstruction methods, and it is also relatively stable in the presence of modest amount of noise.
Acknowledgement: Real projection data used in this study is available from the members of the X-ray lab at the Faculty of Science, University of Helsinki, Finland upon request http://www.fips.fi/dataset.php. We greatly appreciate them to provide us with the data. We also thank four anonymous reviewers for their comments, which significantly improved the manuscript.
Funding Statement: This work was supported by JST-CREST Grant Number JPMJCR1765, Japan.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. A. C. Kak and M. Slaney, “Principles of computerized tomographic imaging,” Society for Industrial and Applied Mathematics, 2001. [Google Scholar]
2. S. R. Deans, “The Radon transform and some of its applications,” in A Wiley-Interscience Publication, New York, 2007. [Google Scholar]
3. X. R. Zhang, X. Sun, W. Sun, T. Xu and P. P. Wang, “Deformation expression of soft tissue based on BP neural network,” Intelligent Automation & Soft Computing, vol. 32, no. 2, pp. 1041–1053, 2022. [Google Scholar]
4. W. Chen, T. Sun, F. Bi, T. Sun, C. Tang et al., “Overview of digital image restoration,” Journal of New Media, vol. 1, no. 1, pp. 35–44, 2019. [Google Scholar]
5. A. Dermanis, A. Grun and F. Sanso, “Geomatics methods for the analysis of data in the earth sciences,” in Springer, Berlin, Heidelberg, Germany, 2000. [Google Scholar]
6. J. Kastner, “Conference on industrial computed tomography (ICT),” in Proc., Shaker Verlag, Aachen, Germany, 2012. [Google Scholar]
7. T. M. Buzug, “Computed tomography,” Springer handbook of medical technology, Springer, Berlin, Heidelberg, 2011. [Google Scholar]
8. G. T. Herman and A. Kuba, “Discrete tomography: Foundations, algorithms, and applications,” in Springer, Boston, 1999. [Google Scholar]
9. P. A. Midgley and R. E. Dunin-Borkowski, “Electron tomography and holography in materials science,” Nature Materials, vol. 8, no. 4, pp. 271–280, 2009. [Google Scholar]
10. M. T. Buzug, “Computed tomography: From photon statistics to modern cone-beam CT,” in Springer, 2008. [Google Scholar]
11. J. Gregor and T. Benson, “Computational analysis and improvement of SIRT,” IEEE Transactions on Medical Imaging, vol. 27, no. 7, pp. 918–924, 2008. [Google Scholar]
12. E. Y. Sidky, M. C. Kao and X. Pan, “Accurate image reconstruction from few-views and limited-angle data in divergent-beam CT,” Journal of X-ray Science and Technology, vol. 14, no. 2, pp. 119–139, 2006. [Google Scholar]
13. X. Tai and J. Duan, “A simple fast algorithm for minimization of the elastica energy combining binary and level set representations,” International Journal of Numerical Analysis and Modeling, vol. 14, no. 6, pp. 809–821, 2017. [Google Scholar]
14. L. Gorelick, O. Veksler, Y. Boykov and C. Nieuwenhuis, “Convexity shape prior for binary segmentation,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 2, pp. 258–271, 2017. [Google Scholar]
15. S. Yan, X. Tai, J. Liu and H. Huang, “Convexity shape prior for level set-based image segmentation method,” arXiv preprint arXiv:1805.08676, 2018. [Google Scholar]
16. K. J. Batenburg and J. Sijbers, “DART: A practical reconstruction algorithm for discrete tomography,” IEEE Transactions on Image Processing, vol. 20, no. 9, pp. 2542–2553, 2011. [Google Scholar]
17. F. J. Maestre-Deusto, G. Scavello, J. Pizarro and P. L. Galindo, “ADART: An adaptive algebraic reconstruction algorithm for discrete tomography,” IEEE Transactions on Image Processing, vol. 20, no. 8, pp. 2146–2152, 2011. [Google Scholar]
18. N. Antal, “Smoothing filters in the DART algorithm. Combinatorial image analysis,” Springer, Lecture Notes in Computer Science, vol. 8466, pp. 224–237, 2014. [Google Scholar]
19. K. J. Batenburg, “3D imaging of nanomaterials by discrete tomography,” Ultramicroscopy, vol. 109, no. 6, pp. 730–740, 2009. [Google Scholar]
20. A. Zürner, M. Döblinger, V. Cauda, R. Wei and T. Bein, “Discrete tomography of demanding samples based on a modified SIRT algorithm,” Ultramicroscopy, vol. 115, pp. 41–49, 2012. [Google Scholar]
21. K. J. Batenburg and J. Sijbers, “Discrete tomography from micro-CT data: Application to the mouse trabecular bone structure,” Medical Imaging 2006: Physics of Medical Imaging, vol. 6142, pp. 1325–1335, 2006. [Google Scholar]
22. W. Van Aarle, K. J. Batenburg, G. Van Gompel, E. Van de Casteele and J. Sijbers, “Super-resolution for computed tomography based on discrete tomography,” IEEE Transactions on Image Processing, vol. 23, no. 3, pp. 1181–1193, 2014. [Google Scholar]
23. H. Segers, W. J. Palenstijn, K. J. Batenburg and J. Sijbers, “Discrete tomography in MRI: A simulation study,” Fundamenta Informaticae, vol. 125, pp. 223–237, 2013. [Google Scholar]
24. M. Kilmer, E. Miller, M. Enriquez and D. Boas, “Cortical constraint method for diffuse optical brain imaging,” Advanced Signal Processing Algorithms Architectures, and Implementations, vol. 5559, pp. 381–391, 2004. [Google Scholar]
25. A. Gelas, O. Bernard, D. Friboulet and R. Prost, “Compactly supported radial basis functions-based collocation method for level-set evolution in image segmentation,” IEEE Transactions on Image Processing, vol. 16, no. 7, pp. 1873–1887, 2007. [Google Scholar]
26. O. Bernard, D. Friboulet, P. Thévenaz and M. Unser, “Variational B-spline level-set: A linear filtering approach for fast deformable model evolution,” IEEE Transactions on Image Processing, vol. 18, no. 6, pp. 1179–1191, 2009. [Google Scholar]
27. A. Kadu, T. van Leeuwen and W. A. Mulder, “Salt reconstruction in full-waveform inversion with a parametric level-set method,” IEEE Transactions on Computational Imaging, vol. 3, no. 2, pp. 305–315, 2017. [Google Scholar]
28. R. G. Pratt, C. Shin and J. G. Hick, “Gauss-newton and full newton methods in frequency–Space seismic waveform inversion,” Geophysical Journal International, vol. 133, no. 2, pp. 341–362, 1998. [Google Scholar]
29. S. Osher and J. A. Sethian, “Fronts propagating with curvature-dependent speed: Algorithms based on hamilton-jacobi formulations,” Journal of Computational Physics, vol. 79, no. 1, pp. 12–49, 1988. [Google Scholar]
30. M. Burger, A level set method for inverse problems,” Inverse Problems, vol. 17, no. 5, pp. 1327, 2001. [Google Scholar]
31. O. Dorn and D. Lesselier, “Level set methods for inverse scattering,” Inverse Problems, vol. 22, no. 4, pp. R67–R131, 2006. [Google Scholar]
32. F. Santosa, “A Level-set approach for inverse problems involving obstacles fadil santosa,” ESAIM: Control, Optimization and Calculus of Variations, vol. 1, pp. 17–33, 1996. [Google Scholar]
33. A. Aghasi and J. Romberg, “Sparse shape reconstruction,” SIAM Journal on Imaging Sciences, vol. 6, no. 4, pp. 2075–2108, 2013. [Google Scholar]
34. A. Aghasi, M. Kilmer and E. L. Miller, “Parametric level set methods for inverse problems,” SIAM Journal on Imaging Sciences, vol. 4, pp. 618–650, 2011. [Google Scholar]
35. S. Osher and R. P. Fedkiw, “Level set methods: An overview and some recent results,” Journal of Computational Physics, vol. 169, no. 2, pp. 463–502, 2001. [Google Scholar]
36. M. Soleimani, W. Lionheart and O. Dorn, “Level set reconstruction of conductivity and permittivity from boundary electrical measurements using experimental data,” Inverse Problems in Science and Engineering, vol. 14, no. 2, pp. 193–210, 2006. [Google Scholar]
37. H. A. Ali and H. Kudo, “New level-set-based shape recovery method and its application to sparse-view shape tomography,” in 2021 4th Int. Conf. on Digital Medicine and Image Processing, Kyoto, Japan, pp. 24–29, 2021. [Google Scholar]
38. H. K. Zhao, T. Chan, B. Merriman and S. Osher, “A variational level set approach to multiphase motion,” Journal of Computational Physics, vol. 127, no. 1, pp. 179–195, 1996. [Google Scholar]
39. H. Y. Tian, S. Reutskiy and C. S. Chen, “A basis function for approximation and the solutions of partial differential equations,” Numerical Methods for Partial Differential Equations: An International Journal, vol. 24, no. 3, pp. 1018–1036, 2008. [Google Scholar]
40. M. W. Schmidt, E. Berg, M. Friedlander and K. Murphy, “Optimizing costly functions with simple constraints: A limited-memory projected quasi-newton algorithm,” in International Conference on Artificial Intelligence and Statistics, Florida, USA, vol. 5, pp. 456–463, 2009. [Google Scholar]
41. T. A. Bubba, M. Juvonen, J. Lehtonen, M. März, A. Meaney et al., “Tomographic X-ray data of carved cheese,” arXiv preprint arXiv:1705.05732, 2017. [Google Scholar]
42. A. Chambolle and T. Pock, “A First-order primal-dual algorithm for convex problems with applications to imaging,” Journal of Mathematical Imaging and Vision, vol. 40, no. 1, pp. 120–145, 2011. [Google Scholar]
43. A. Kadu and T. van Leeuwen, “A convex formulation for binary tomography,” IEEE Transactions on Computational Imaging, vol. 6, pp. 1–11, 2019. [Google Scholar]
44. D. C. Liu and J. Nocedal, “On the limited memory bfgs method for large scale optimization,” Mathematical Programming, vol. 45, no. 1–3, pp. 503–528, 1989. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |