DOI:10.32604/iasc.2021.018214
| Intelligent Automation & Soft Computing DOI:10.32604/iasc.2021.018214 | |
| Article |
Robust Optimal Proportional–Integral Controller for an Uncertain Unstable Delay System: Wind Process Application
1College of Engineering, Muzahimiyah Branch, King Saud University, Riyadh, 11451, Saudi Arabia
2Laboratory for Analysis, Conception and Control of Systems, LR-11-ES20, Department of Electrical Engineering, National Engineering School of Tunis, Tunis El Manar University, Tunis, 1002, Tunisia
*Corresponding Author: Yasser Fouad. Email: yfouad@ksu.edu.sa
Received: 01 March 2021; Accepted: 04 April 2021
Abstract: In industrial practice, certain processes are unstable, such as different types of reactors, distillation columns, and combustion systems. To ensure greater maneuverability and improve the speed of response command, certain systems in the military and aviation fields are purposely configured to be unstable. These systems are often more difficult to control than stable systems and are of particular interest to designers and control engineers. Despite all advances in process control over the past six decades, the proportional–integral–derivative (PID) controller is still the most common. The main reasons are the simplicity, robustness, and successful applications provided by PID-based control structures. The design of proportional–integral (PI) controller for time-delay (TD) systems is a traditional and classical problem. On one hand, PI controllers are used in more than 95% of industrial processes. On the other hand, there are TD phenomena in almost all practical control systems. In this paper, we study the robustness of a PI controller in stabilizing systems containing uncertain parameters and delays. A robust controller for an unknown unstable second-order with margin TD is constructed using a generalized Kharitonov theorem for quasi-polynomials. A constructive method based on the Hermite–Biehler theorem is used to obtain all PI gains, which stabilize an uncertain and unstable second-order delay system. Genetic algorithms (GAs) and optimization methods are used to obtain optimal system and control parameters for providing the best PI control that makes the system robust and stable under uncertainty. By minimizing performance criteria such as the integral of square error, integral of absolute error, time-weighted integral of absolute error, and integral of time weighted square error, GAs and particle swarm optimization are used to optimize the PI parameters and system parameters that provide the best control under uncertainties.
Keywords: Unstable time-delay system; interval plants; Generalized Kharitonov Theorem (GKT); PI controller; Hermite–Biehler theorem; stability region; genetic algorithms; Particle swarm optimization; optimum PI controller; optimum system parameters; wind process application
Time delays are found in several industrial processes and engineering systems, such as hydraulic systems, turbojet engines, chemical processes and communication networks. Delays have a considerable effect on the dynamic behavior of closed-loop control systems and can cause oscillations and even lead to instability [1]. According to Gao et al. [2], over 90% of the physical systems in process control can be modelled by first-order + time-delay (TD) and second-order + TD (about 30%) models with tolerable accuracy.
Open-loop unstable delay systems are popular in the processing industry. Compared with stable open-loop systems, open-loop unstable delay systems pose a relatively challenging problem for controller design. In an unstable delay system, the presence of an unstable pole imposes a minimum control performance limit, which could yield long settling time and excessive overshoot.
Although the proportional–integral–derivative (PID) controller is an antiquated design, numerous applications for the control of industrial process prefer and widely use it. This is because of its simple structure, satisfactory control effect, and acceptable robustness [3]. Over the past six decades, numerous techniques have been used to calculate the parameters PID controller of systems with long TD. The use of PID controllers to stabilize uncertain systems with or without delay has received a lot of attention.
A generalization of the Hermite–Biehler theorem (HBT) is one of the well-known methods for determining the stabilizing PID controller region [4]. To define all stabilizing regions of PID parameters, this approach necessitates sweeping over the proportional gain. An extended theorem, which was used to locate the PID stabilizing parameter regions, used the HBT as its basis. Farkh et al. [5] have derived the complete stabilizing set of the classical proportional–integral (PI) and PID controller parameter regions for unstable second-order TD plants.
Ma et al. [6] presented explicit lower bounds on the delay margin of second-order unstable delay systems using PID controller. In Wang et al. [7], a multiple dominant pole placement for an unstable delay system, was used to build a PID controller with a lead/lag filter. An internal model control-PID controller was proposed for an unstable second-order TD system, which shows the characteristics of inverse response [8]. PID controller tuning using genetic algorithm (GA) for stable and unstable process was presented in Ayas et al. [9]. A particle swarm optimization (PSO) algorithm was proposed to tune and retune the parameter of PID controller for a class of unstable TD systems [10].
Over the last few decades, there has been a lot of interest in the stable stability of uncertain systems. For the stability analysis of interval systems, the Kharitonov theorem (KT) is well-known. The performance and stability of plants that are exposed to uncertainties are defined as robustness.
The edge theorem in Barmish et al. [11] and the box theorem in Kwon et al. [1] were based on KT and suggested that the set of transfer functions generated by varying its perturbed coefficients in the defined ranges corresponds to a box in the parameter space and is referred to as "interval plants."
Generalized KT (GKT) states that a controller robustly stabilizes an interval system if it stabilizes a specified set of line segments in the plant parameter space [12,13].
Researchers have expanded the GKT and edge theorem to determine the robust stability of a TD system subjected to parametric uncertainty in the case of quasi-polynomials [14,15].
Relevant results relating to the stabilization of interval systems have been acquired from previous studies. In Barmish et al. [16], it was proven that a first-order controller stabilized an interval plant if and only if the controller stabilized the 16 plants of the Kharitonov plant family at the same time.
A parameter plan based on KT and the gain phase margin tester method was used in Huang et al. [17] to obtain the nonconstructive region of a PID controller, which stabilizes the entire interval plants.
The stability boundary locus can be used to find the stabilizing region of PI parameters for the regulation of a plant with unknown parameters, according to Tan et al. [18].
Patre et al. [19] suggested a two-degrees-of-freedom design technique for interval process plants to ensure robust stability and satisfactory performance.
To stabilize a delay-free interval plant family, the HBT was employed in Refs. [20,21] to formulate the proportional, PI, and PID controllers. The stabilizing problem of a PI/PID controller was studied for a first-order delay system and then used to find both PI and PID gains that stabilize an interval first-order delay system [22].
We propose in this paper to extend the work presented in Farkh et al. [23] by determining the set of all PI gains that stabilize an unstable uncertain second-order delay system with coefficients that are perturbed within prescribed ranges. Applying GAs and PSO algorithms in the robust stable region using integral performance criteria, the optimal PI controller and optimal system parameters are then calculated.
A tool to design a robust PI controller for an unstable second-order system with bounded uncertain parameters and bounded uncertain TD is proposed in this paper.
We consider the plant family
By combining robust stabilization results obtained earlier [4], which are presented in Section 5, and the approach developed in Section 3, we designed a robust PI controller that stabilizes the uncertain plant family
3 PI Controller Design for Unstable Second-Order Delay System
In Farkh et al. [5], all stabilizing PI controllers’ computation for an unstable delay system was considered.
3.1 Theorem 1 [5]
Under the assumptions, K > 0, L > 0, a0 < 0, and a1 > 0, the
where
The range of Ki values is given by
where
and
Consider the following transfer function for a second-order delay system:
To determine the values of
For
We notice that
Consequently, we choose the final range of
The system stability region is obtained in
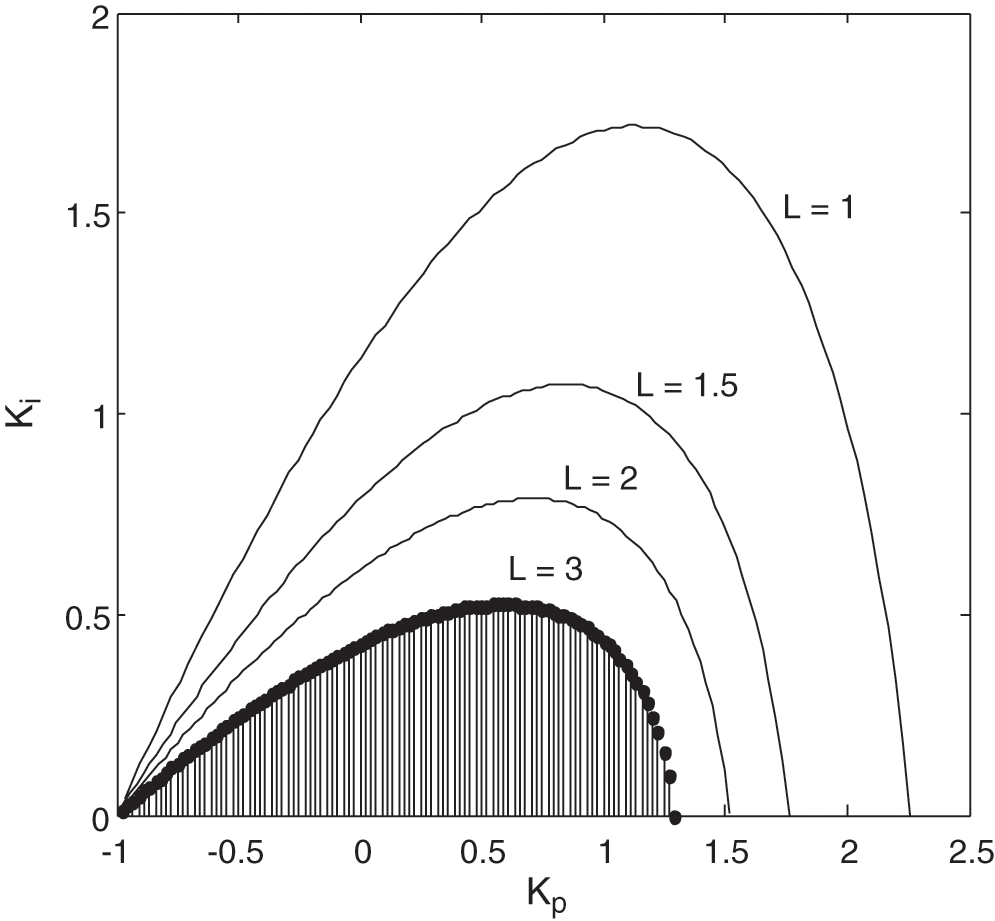
Figure 1: Sets of stabilizing PI controllers for Example 1
4 Design of a Robust Controller for an Unstable System with an Uncertain Delay
The problem of stabilizing an unstable second-order system with TD is presented in this section., where the parameters
We consider the following plant family:
4.1 Lemma 1 [4]
Consider the system with a transfer function
Consider the plant family
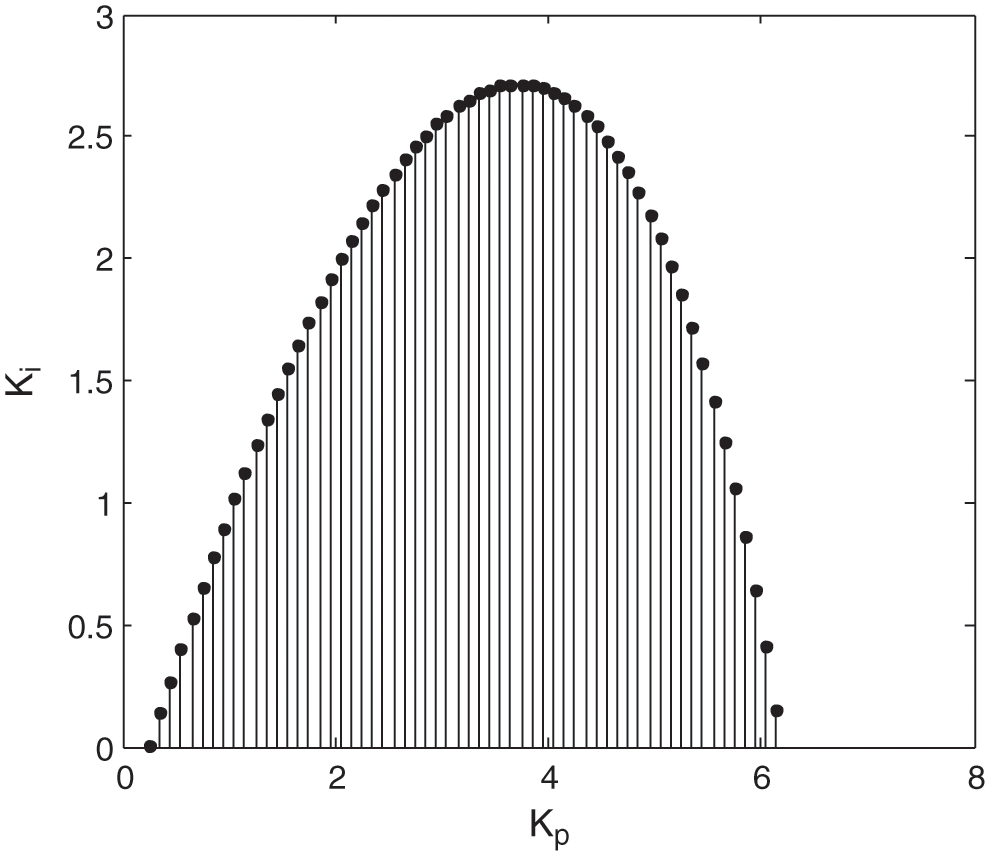
Figure 2:
Fig. 2 represents these sets for
Thus, any PI controller from this set will stabilize the entire family of plants described by
This result is used to simplify the problem stabilization of the family plant
The delay is set to
5 Robust Controller Design for Interval System with Fixed TD
The procedure for finding a robust stabilization of an unstable delay system belonging to a linear interval plant is discussed in this section, where the TD, L, is a known constant.
Consider the transfer function below:
where
To compute all the stabilizing controller parameters for interval systems with TDs, we can use the GKT expanded for quasi-polynomials [13]. Before stating the GKT, we study some results from the field of robust parametric control.
Consider the following family of quasi-polynomials
−
−
where
In this sudy, we use
The stability problem (2) can be solved with the GKT by constructing an extremal set of line segments
5.1 Theorem 2 [13]
Let
The linear system
To use the GKT, we must first define the most extremal set of line segments
and
where:
The extremal subset
where
The number of extremal equations is
Some of the subset equations may be the same; hence, the extremal subset is described as [13]:
The extremal subset of line segments (or generalized Kharitonov segment polynomials) is [2]:
where
With the knowledge that
The robust parametric approach control technique is an efficient control design technique, as shown by the previous findings.
For the synthesis of controllers that simultaneously stabilize a given uncertain TD system, the following will be used.
6 Robust Stabilization for Uncertain Unstable Second-Order Delay System
The problem of characterizing all PI controllers that stabilize an unstable second-order interval plant with TD is addressed in this section.
The controller is given by:
Using the GKT for quasi-polynomials, we can obtain all PI gains that stabilize
The family of closed-loop characteristic quasi-polynomials
The problem of determining all stabilizing PI controllers is to find all the values of
Let
where:
Let
Then,
The closed-loop characteristic quasi-polynomials for each of these 32 plant segments
where:
We posit the following theorem on using a PI controller to stabilize a second-order interval plant with TD.
Let
According to Theorem 3, the entire family
To obtain the all PI controllers that stabilize the interval plant
We consider the plant family
The entire family
According to Eq. (14), we obtain
We remark that from
We set
Therefore, we obtain
We define
We obtain
The following figure (Fig. 3) presents the stabilizing
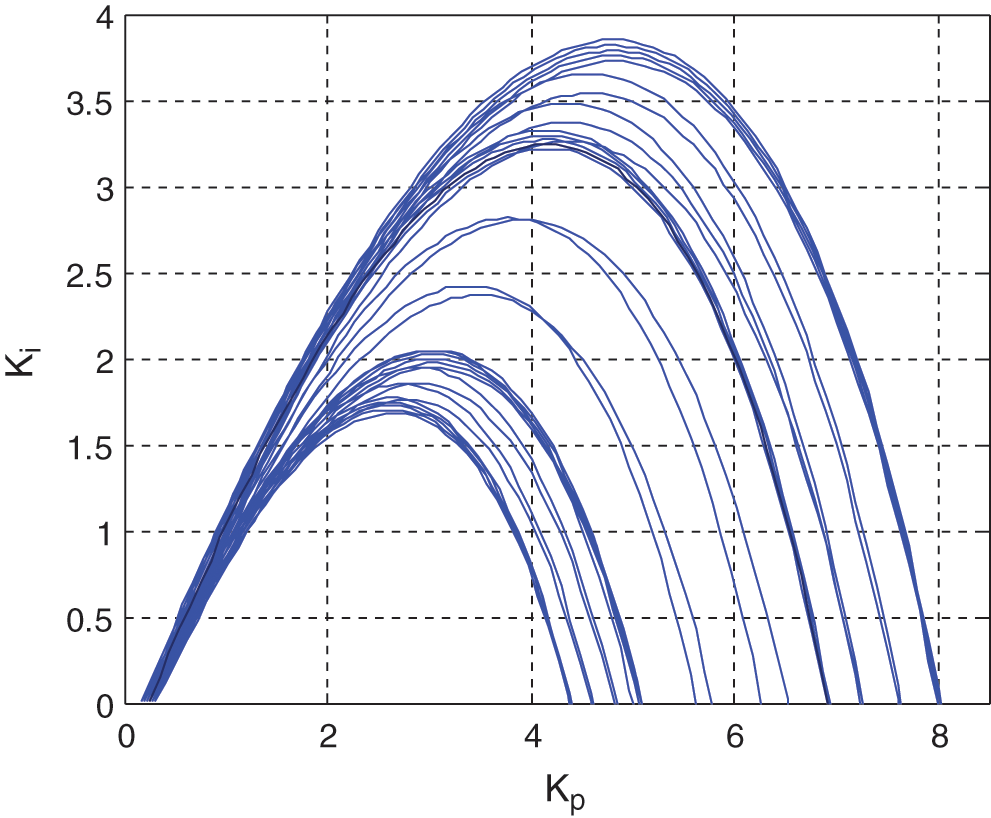
Figure 3: The stabilizing set of
An overlapped area of the boundaries is the intersection of these stability regions, which constitutes the entire feasible controller sets that stabilize the entire family
Figure 4: Final stability region in
7 Optimization Controller Design
GAs are effective stochastic search methods based on natural selection and evolutionary genetics principles.
GAs sustain a community of individuals. Individuals are adapted to a particular setting by changing the discovery, crossover, and mutation periods. People benefit from the environment's valuable knowledge (fitness), and the selection mechanism ensures that people of higher quality are preserved.
As a result, the population's overall output increases during the development cycle, ideally contributing to an optimal solution [24]. Because of its strong capacity for global optimization, GA is used in a variety of fields.
Particle swarm optimization (PSO) [25] is an artificial intelligence-based technique for maximizing and minimizing problems.
It was inspired by the social behavior of animals, such as birds flocking and fish schooling. It starts with a random set of solutions (known as particles). Each particle has its positions (value of variables) and velocities. It improves the initial solutions by updating velocities and positions.
Fig. 5 illustrates the theory of PSO and GA optimization for control problems.
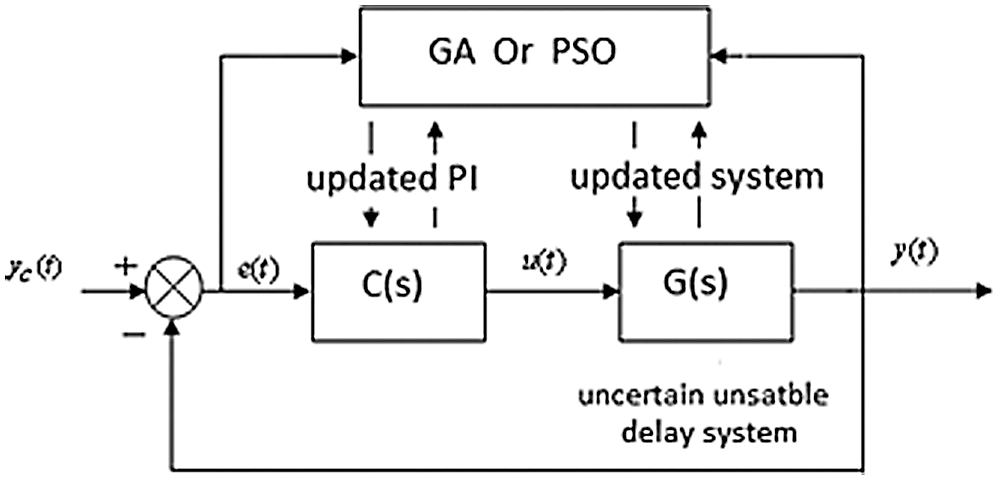
Figure 5: Optimization of controller and system parameters
In this case, it's in our best interests to find the best system and controller parameters in the robust stability area by combining one or more of the following criteria:,
We consider the uncertain, unstable delay system
The robust PI stability region is given in Fig. 4, from which
The following table presents the optimum PI and system parameters supplied by GA and PSO.
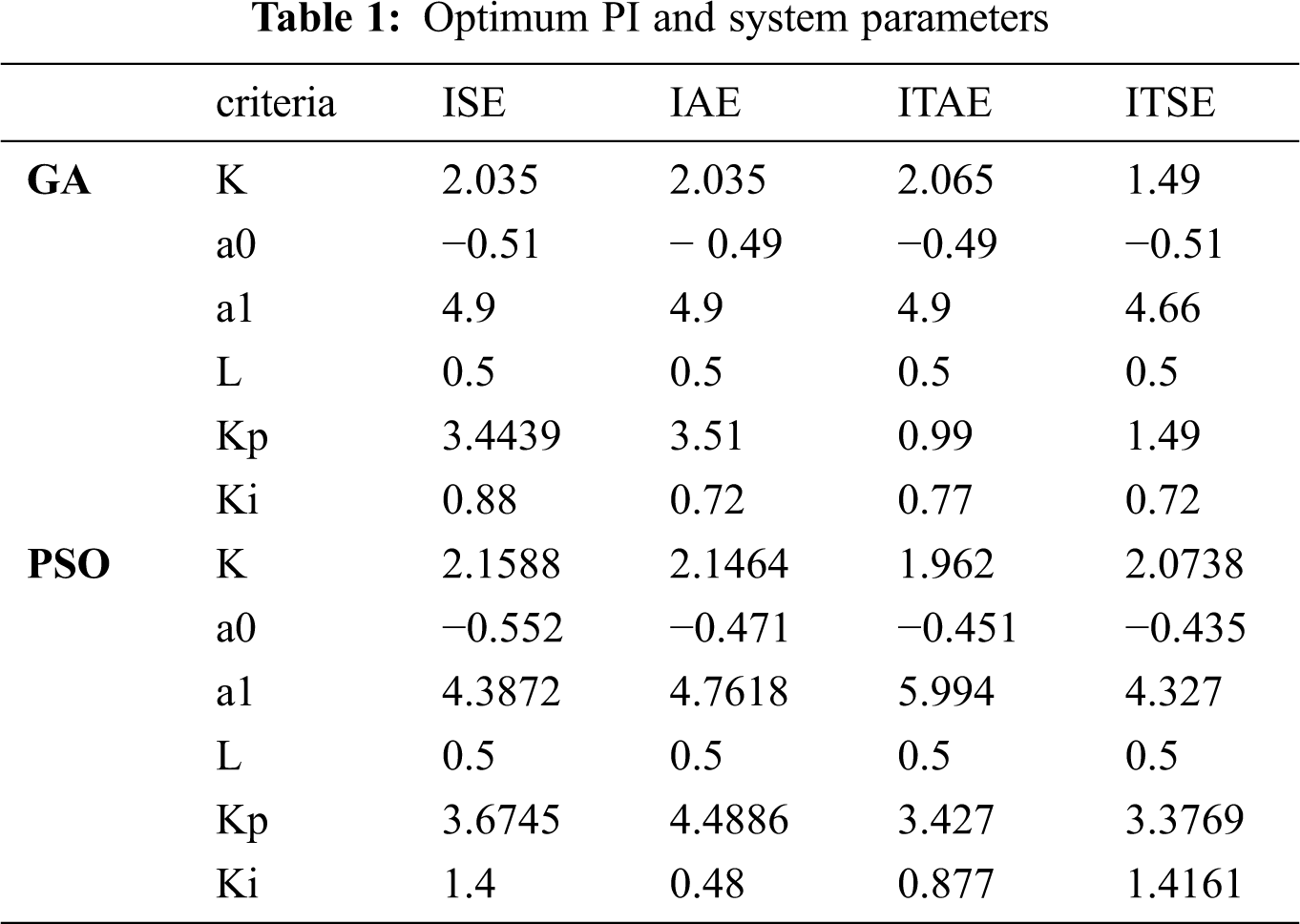
Using the values in Tab. 1, Figs. 6 and 7 show the closed-loop system's step responses.
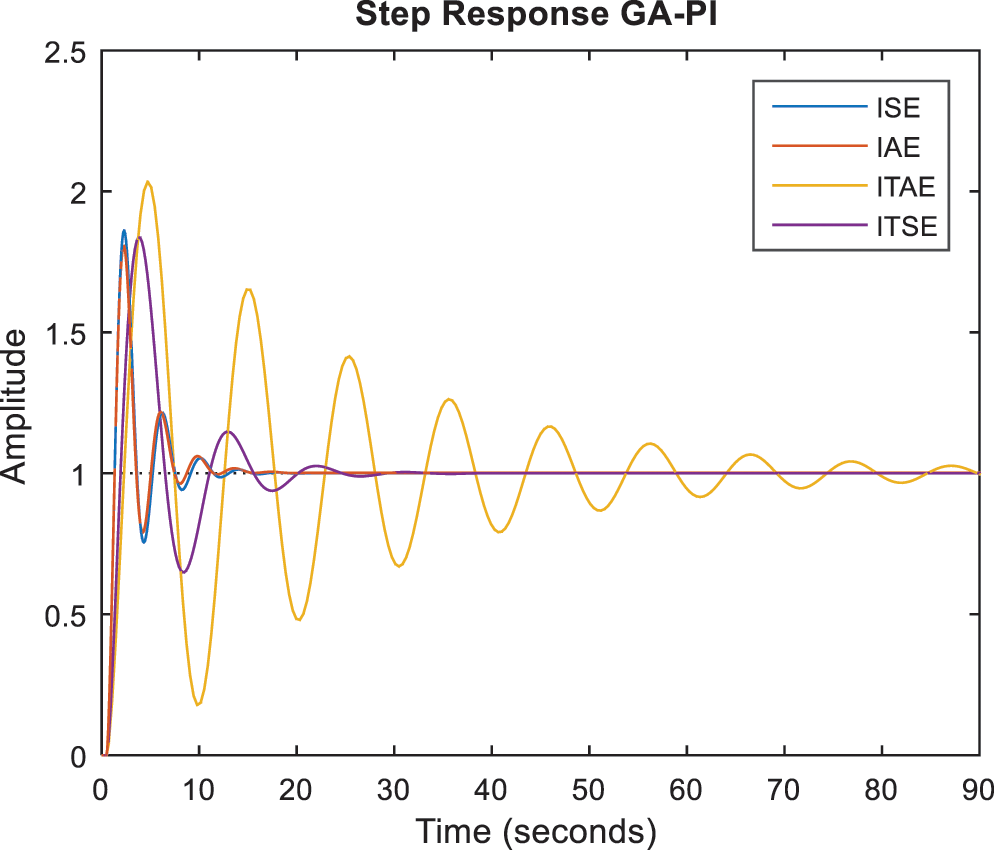
Figure 6: Step responses with GA-PI controllers
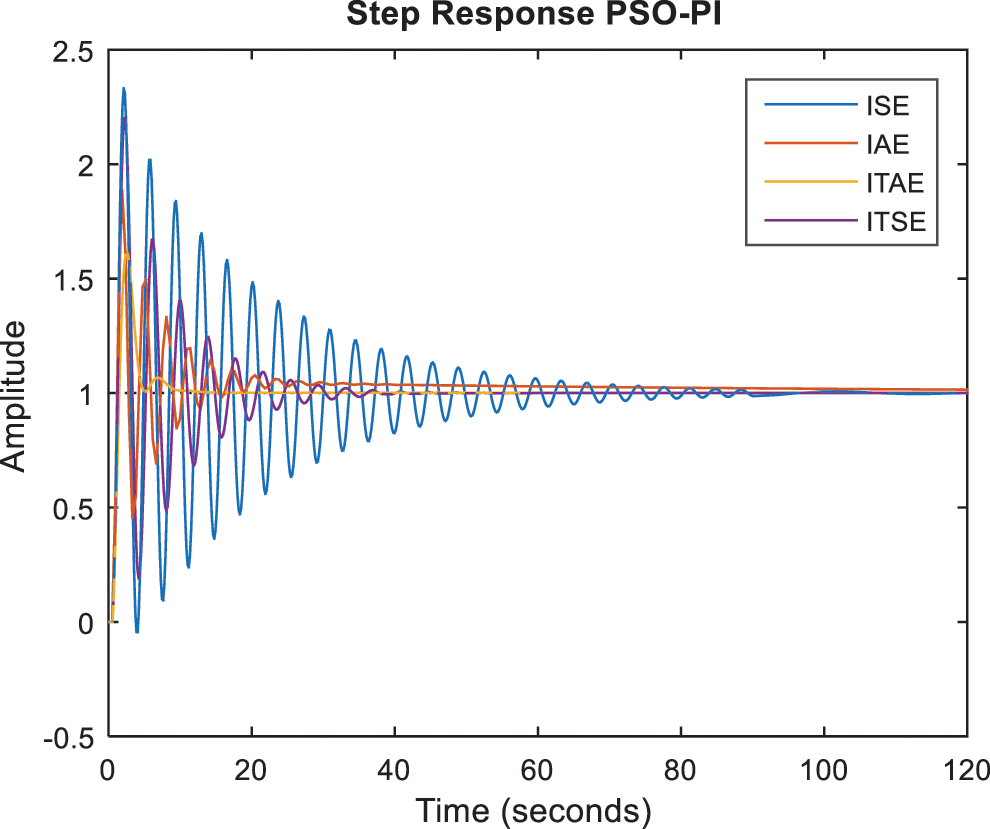
Figure 7: Step responses with PSO-PI controllers
The time parameter specifications are given in Tab. 2.
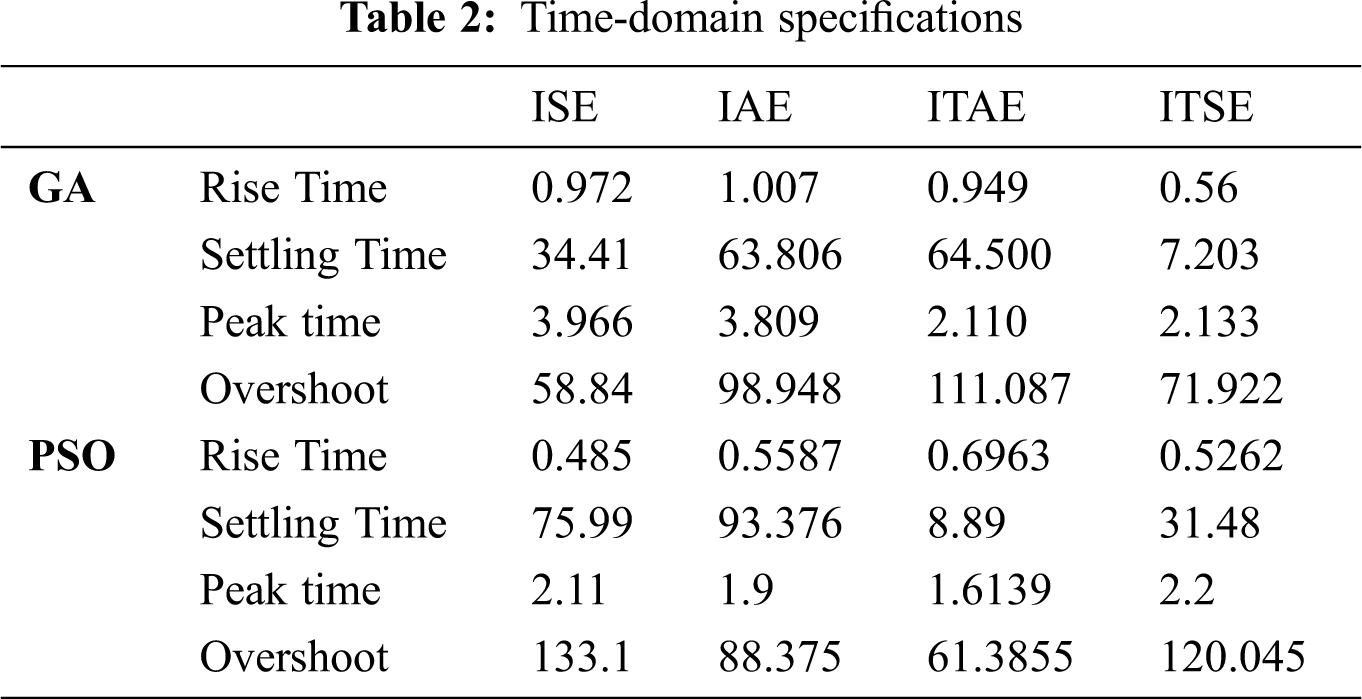
The HBT and GKT can be applied promptly to define the robust PI stability area for the control of uncertain and unstable second-order TD systems. The optimal system and optimal PI control parameters were computed using the integral performance criterion based on the optimization process's error.
Acknowledgement: The authors extend their appreciation to the Deputyship for Research and Innovation, Ministry of Education in Saudi Arabia, for funding this research work through the project number (DRI-KSU-1410)
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. W. H. Kwon and P. G. Park, “Stability of time-delay systems,” in Communications and Control Engineering, Berlin, Springer, 2019. [Google Scholar]
2. Q. Gao and H. R. Karimi, Stability, Control and Application of Time Delay Systems. Butterworth-Heinemann, 1st edition, pp. 54–98, 2019. [Google Scholar]
3. C. Knospe, “PID control,” in IEEE Control Systems Magazine, vol. 26, no. 1, pp. 30–31, 2006. [Google Scholar]
4. G. J. Silva, A. Datta and S. P. Bhattacharyya, PID controllers for time delay systems. Springer, Berlin, 2005. [Google Scholar]
5. R. Farkh, K. Laabidi and M. Ksouri, “Stabilizing sets of PI/PID controllers for unstable second order delay system,” International Journal of Automation and Computing, vol. 11, no. 2, pp. 210–222, 2014. [Google Scholar]
6. D. Ma, J. Chen, A. Liu, J. Chen and S. I. Niculescu, “Explicit bounds for guaranteed stabilization by PID control of second-order unstable delay systems,” Automatica, vol. 100, pp. 407–411, 2019. [Google Scholar]
7. Z. Wang, X. Ran, B. Zhao and J. Zhao, “GA tuning PID controller based on second-order time-delay industrial system,” in MATEC Web of Conferences, vol. 288, 2019. [Google Scholar]
8. M. Kumar, D. Prasad and R. S. Singh, “Performance enhancement of IMC-PID controller design for stable and unstable second-order time delay processes,” Journal of Central South University, vol. 27, no. 1, pp. 88–100, 2020. [Google Scholar]
9. M. S. Ayas and E. Sahin, “Parameter effect analysis of particle swarm optimization algorithm in PID controller design,” An International Journal of Optimization and Control: Theories & Applications, vol. 9, no. 2, pp. 165–175, 2019. [Google Scholar]
10. V. Rajinikanth and K. Latha, “Tuning and retuning of PID controller for unstable systems using evolutionary algorithm,” ISRN Chemical Engineering, vol. 2012, pp. 1–10, 2012. [Google Scholar]
11. B. R. Barmish, C. V. Holot, F. J. Kraus and R. Tempo, “Extreme points results for robust stabilization of interval plants with first order compensators,” IEEE Transaction on Automatic Control, vol. 37, no. 6, pp. 707–714, 1992. [Google Scholar]
12. S. P. Bhattacharyya, H. Chapellat and L. H. Keel, Robust Control the Parametric Approach. Upper Saddle River, NJ: Prentice-Hall, 1995. [Google Scholar]
13. S. P. Bhattacharyya and H. Chapellat, “A generalization of Kharitonov's theorem: Robust stability interval plants,” IEEE Transaction on Automatic Control, vol. 3, pp. 306–311, 1989. [Google Scholar]
14. K. Gu and V. Kharitonov, “Robust stability of time-delay systems,” IEEE Transaction on Automatic Control, vol. 39, no. 12, pp. 2388–2397, 1994. [Google Scholar]
15. V. L. Kharitonov, J. A. Torres-Muñoz and M. B. Ortiz-Moctezuma, “Polytopic families of quasi-polynomials: Vertex-type stability conditions,” IEEE Transaction on Circuits and Systems, vol. 50, no. 11, pp. 1413–1420, 2003. [Google Scholar]
16. B. R. Barmish, C. V. Holot, F. J. Kraus and R. Tempo, “Extreme points results for robust stabilization of interval plants with first order compensators,” IEEE Transaction on Automatic Control, vol. 37, no. 6, pp. 707–714, 1992. [Google Scholar]
17. Y. J. Huang and Y. J. Wang, “Robust PID tuning strategy for uncertain plants based on the Kharitonov theorem,” ISA Transaction, vol. 39, pp. 419–431, 2000. [Google Scholar]
18. N. Tan, I. Kaya, C. Yeroglu and D. P. Atherton, “Computation of stabilizing PI and PID controllers using the stability boundary locus,” Energy Conversion and Management, vol. 47, pp. 3045–3058, 2006. [Google Scholar]
19. B. M. Patre and P. J. Deore, “Robust stability and performance for interval process plants,” ISA Transactions, vol. 46, pp. 343–349, 2007. [Google Scholar]
20. M. T. Ho, A. Datta and S. P. Bhattacharyya, “Design of P, PI and PID controllers for interval plants,” in Proc. of the American Control Conf., Philadelphia, PA, USA, vol. 4, pp. 2496–2501, 1998. [Google Scholar]
21. G. J. Silva, A. Datta and S. P. Bhattacharyya, “Robust control design using PID controller,” in Proc. 41 st IEEE Conf. on Decision and Control, Las Vegas, NV, USA, vol. 2, pp. 1313–1318, 2002. [Google Scholar]
22. R. Farkh, K. Laabidi and M. Ksouri, “Robust PI/PID controller for interval first order system with time delay,” International Journal of Modelling Identification and Control, vol. 13, no. 1/2, pp. 307–321,2011. [Google Scholar]
23. R. Farkh, K. A. Aljaloud, M. Ksouri and F. Bouani, “Optimal robust control for unstable delay system,” Computer Systems Science and Engineering, vol. 36, no. 2, pp. 307–321, 2021. [Google Scholar]
24. T. Jili, Z. Ridong and Z. Yong, “DNA computing based genetic algorithm,” in Applications in Industrial Process Modeling and Control. Springer, Berlin, pp. 25–55,2020. [Google Scholar]
25. A. Slowik, Swarm Intelligence Algorithms. CRC Press, United States, 2020. [Google Scholar]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |