| Sound & Vibration |
DOI: 10.32604/sv.2021.015014
ARTICLE
On Some Modified Methods on Fractional Delay and Nonlinear Integro-Differential Equation
1Department of Mathematics, Faculty of Science, Arish University, AL-Arish, Egypt
2Department of Mathematics, Faculty of Science, AL-Azhar University, Cairo Governorate, Egypt
3Basic Science Department, Higher Technological Institute, 10th of Ramadan City, Egypt
*Corresponding Author: A. M. Abdallah. Email: ahmedabdel3l@yahoo.com
Received: 16 November 2020; Accepted: 13 August 2021
Abstract: The fundamental objective of this work is to construct a comparative study of some modified methods with Sumudu transform on fractional delay integro-differential equation. The existed solution of the equation is very accurately computed. The aforesaid methods are presented with an illustrative example.
Keywords: Convergence; stability; fractional integro-differential equation
Recently, a variety of transformations were applied by some mathematicians which include widespread tremendous progress in the study of linear and nonlinear equations. A similar great transform to Laplace, Fourier and other transformations are so-called Sumudu transform [1,2]. Really, it does not require any conditions on the function to be transformed [3].
In order to solve various linear and nonlinear equations approximately, many researchers incorporate traditional methods into transformations, such as Laplace, Sumudu, differential transform method and others [4–19].
Henceforth, we focus our attention on the combination of the homotopy perturbation (HPM), series solution, homotopy analysis (HAM), Adomian decomposition method (ADM) and variational iteration methods (VIM) with Sumudu transform, then compares the previous composition in order to ensure the high accuracy and reliability and convergence for the offered methods. The above mentioned combination is namely modified methods. One can see those modified methods are considered to be a new powerful development technique to solve several problems. For more details, we point out those modified methods can be used to solve some non-linear fractional delay integro-differential equations. Nowadays, comparison between the preceding mentioned methods plays a vital role in the study of fractional delay and nonlinear integro-differential equation.
The plan of this discussion as follows. In Section one, the main concepts that are applied in our paper are considered. In Section two, the modified methods are mentioned. In Section three, computational scheme for the proposed problem discussed. In Section four, special cases are stated. Finally, the comparative study is concluded in Section five.
Here, we now briefly recall some necessary definitions, preliminaries and properties are used further in this work as follows:
Definition 1.1. Let U be the set of functions such that
for a real number t t ∈ [0, ∞) the Sumudu transform of a function t u(t) over the set U(t) can be written as
The relation between Laplace and Sumudu transforms are as
For further properties of the Sumudu transform
[1]
[2]
where
[3] Linearity of the Sumudu transform, if a, b are constants,
[4] For α ∈ [1, n], Sumudu transform of the Caputo fractional derivative is represented by
[5] The Sumudu transform of the Riemann-Liouville fractional integral of order α ∈ (0, ∞) is given as
[6] The Caputo fractional derivative of order α > 0, defined for a continuous function by
We describe the following fractional derivative in the Caputo sense
under the initial condition:
where the fractional differential operator
2.1 Modified Sumudu Homotopy Perturbation Method (MSHPM)
Taking the Sumudu operator S to both sides of Eq. (7), yields
With the help of the linearity of Sumudu operator,
Now, applying the property of the differentiation for Sumudu transform
where
further, the solution u(t) and nonlinear functions can be described by infinite series as following:
substitute (13)–(16) in (12), we get
On comparing of the two both sides of (20). Hence, we obtain
in the same manner, we can calculate un, n > 1. The approximate solution is given by
the convergence of the series solutions are very easily with known methods.
2.2. Modified Sumudu Series Solution Method (MSSSM)
Evidently, on continuing the same fourth steps from Eqs. (9)–(12). As a result, by the aid of series solution method (12)
in (12), taking (23)–(26) into consideration
By the comparison of the coefficients on two both sides (27) and Taylor series. Consequently, the existed solution is in a closed form.
2.3 Modified Sumudu Homotopy Analysis Method (MSHAM)
In this section, Sumudu transform directly coupled with a homotopy analysis method. For an embedding parameter α ∈ [0, 1], we construct the nonlinear operator
By HAM, the deformation equation of order zero is constructed as follows:
where r, c are the non zeros auxiliary parameter and functions respectively. ε(t;r) differ from u0(t) to u1(t). In particular, r = 0,
by Taylor series, we can expand
where
at r = 1. Differentiate (29) with respect to r, finally set r = 0 and divide by Γ(n + 1). However, the deformation equation of n −th order is expressed by
where
And
By means of the inverse Sumudu transform operator S−1
The solution can be written as
2.4 Modified Sumudu Variational Iteration Method (MSVIM)
This section is based on the combination of variational iteration method with Sumudu transform.
Let us apply the inverse Sumudu transform of both sides (12).
Now, differential the preceding equations with respect to t,
Due to the variational iteration method, the correct function can be rewritten as:
So, the limit of {um(t)}m≥0 is equivalent to the exact solution.
2.5 Modified Sumudu Decomposition Method (MSDM)
Upon using the Sumudu decomposition method, definition of the solution u(t) and the nonlinear functions are given by the infinite series
where, Xj, Yj and Zj are the Adomian polynomials of u0, u1, … , uj.
Now, the Adomian polynomials for the nonlinear functions are written as
The new recursive relation becomes
etc.,
Finally,
Substitute (41) in (12), we have
By Comparison of two both sides (45). The following iterative algorithm:
In general form,
Suggest that R(t) is decomposed into two parts:
Generally,
Example:
with the initial condition: u(0) = 0, with the exact solution u(t) = t at τ = 1 and α = 0.75.
Solution:
(1) By MSHPM:
Taking Sumudu transform to both sides of (46)
From (4) with initial conditions, we gain
That is, for a special value α = 0.75 and (48) is equivalent to
By homotopy perturbation Sumudu transform method, it follows immediately that,
i.e.,
Repeat the above procedure until i = m, so the approximate solution is equal to the exact solution
(2) By MSSSM:
Throughout method of series solution in (46), for ci = 1
substituting (52)–(55) in (47)
particularly, α = 0.75, τ = 1. By the argument the both sides (56). Then un tends to u0 = t whenever n → ∞.
(3) By MSHAM:
Put c(t) = 1, the zero-order deformation equation is readily given by:
where,
As a result
The n-th order deformation equation is obtained as
Especially, if α = 0.75, c = 1 and from the relationship in (36), we find
For more generality un approaches to u0 = t as n → ∞ which gives the required solution.
(4) By MSVIM:
We construct the iteration formula as
In particular, α = 0.75, upon using the iteration formula
Hence, the general term um is obtained as um = t agrees well with the exact solution as m tends to infinity.
(5) By MSDM:
Obviously,
set α = 0.75, it implies that
For more generality,
From Adomian decomposition, we have
Then it follows:
3. Computational Scheme for the Proposed Problem
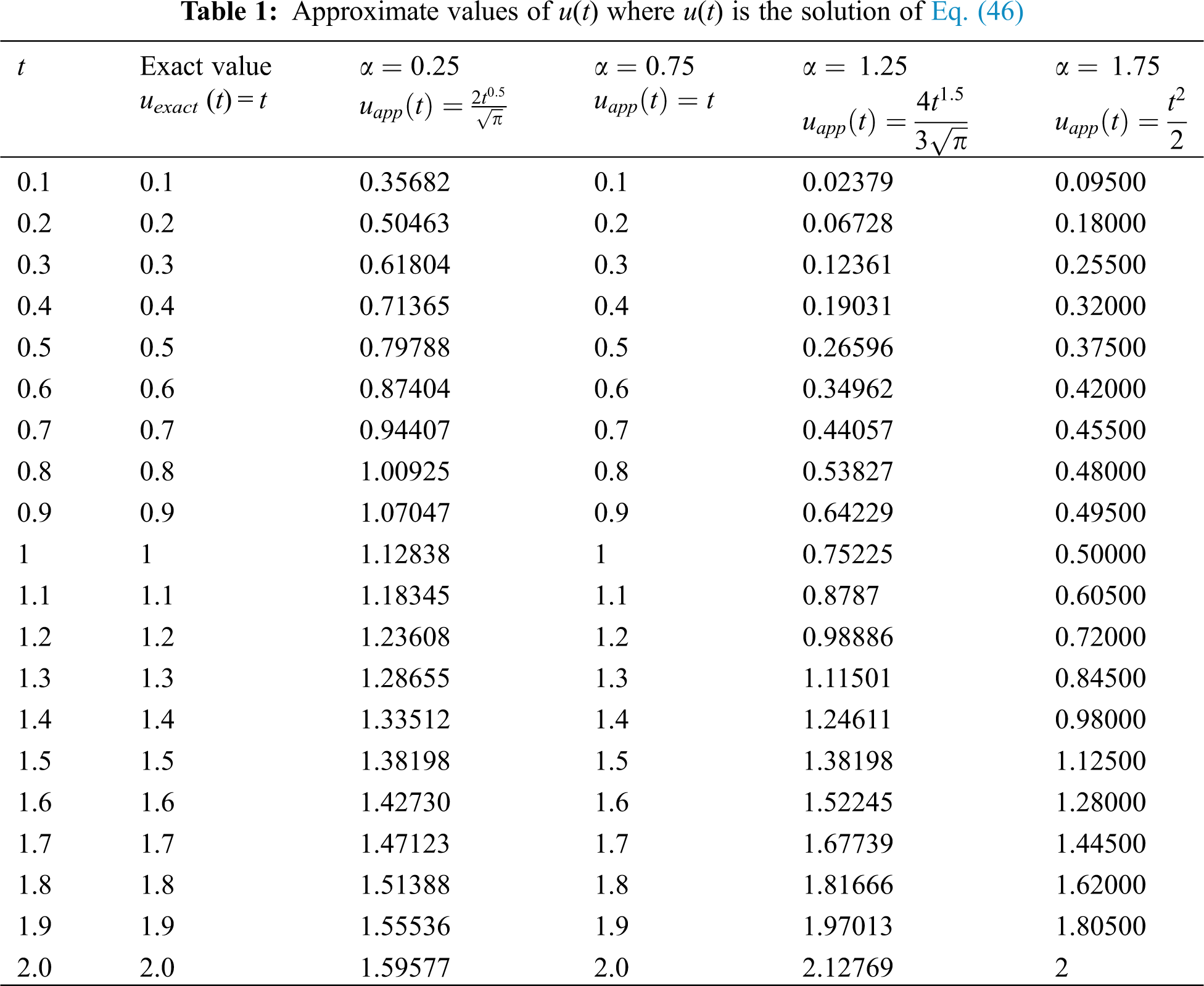
The estimate we will obtain in this section seems to be independent of interest. Without restriction of generality, we can assume α = 0.25, 0.75, 1.25 and α = 1.75 hold for t = 0.1, 0.2, …, 2. We compute the experimentally determined solution of Eq. (46) for the different values of α with many values of t. This yields information about the analogue between the exact and approximate value of u(t).
Figs. 1–Figs. 4 show that there are intersections between exact uexact(t) = t and approximate value
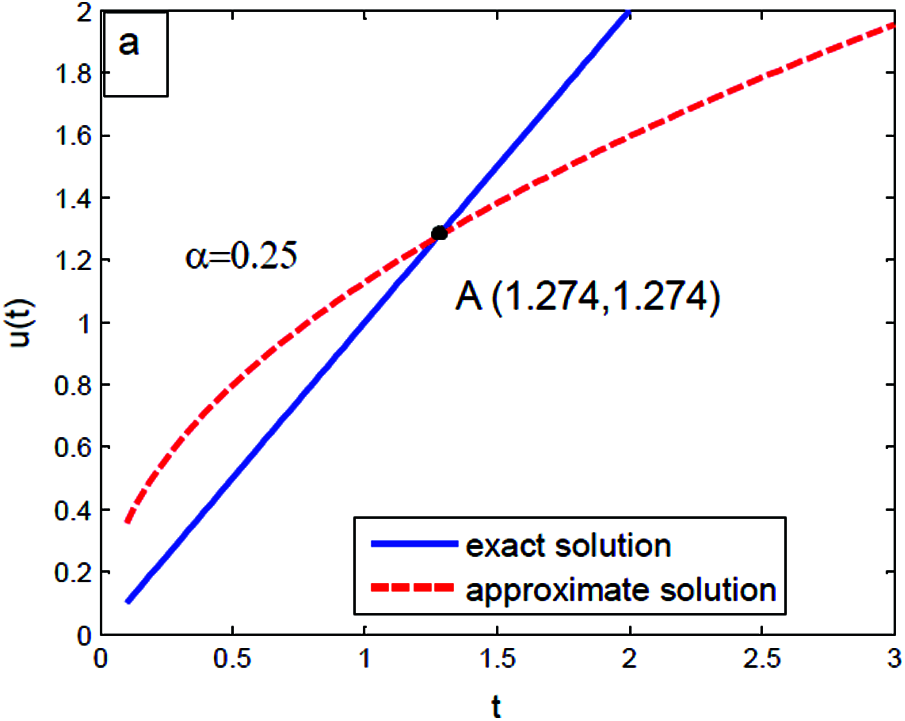
Figure 1: The experimentally determined solutions at t = 0.1, 0.2, …, 2 in Eq. (46) with
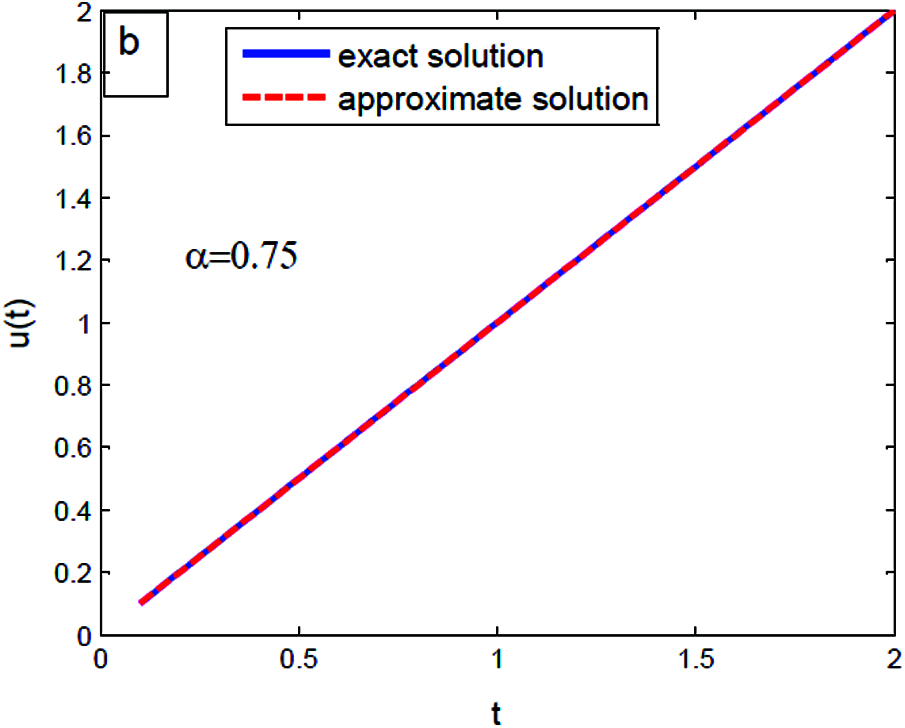
Figure 2: The experimentally determined solutions at t = 0.1, 0.2, …, 2 in Eq. (46) with α = 0.75
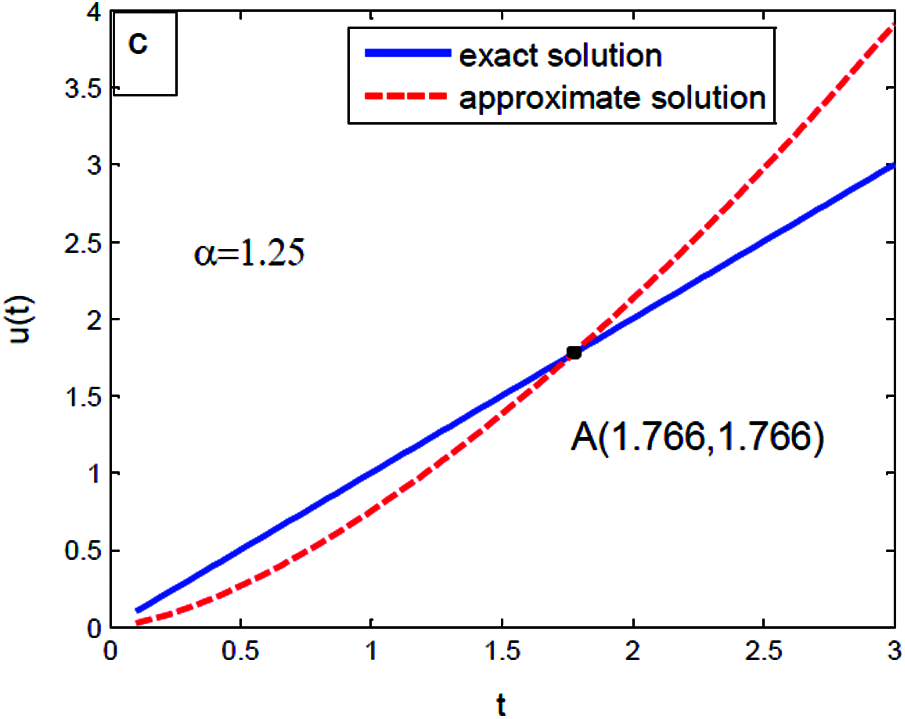
Figure 3: The experimentally determined solutions at t = 0.1, 0.2, …, 2 in Eq. (46) with α = 1.25
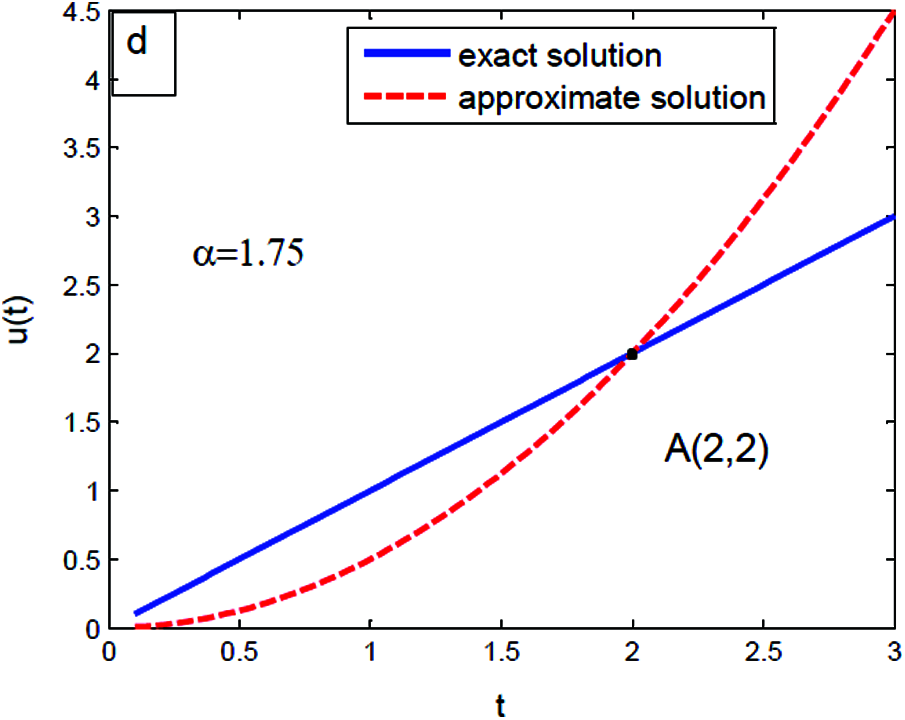
Figure 4: The experimentally determined solutions at t = 0.1, 0.2, …, 2 in Eq. (46) with α = 1.75
It is evident that this manuscript is more generalized from analogues papers. More remarkable special cases which are covered by a lot of last papers.
Remark 1 If the Eq. (7) has no delay item, it becomes fractional Volterra-Fredholm integro-differential equation [4].
Remark 2 If the Eq. (7) has no delay item and α = 1, it becomes integro-differential equation [2,14].
Remark 3 If the Eq. (7) has no delay item and it becomes Fractional integro-differential equation [11].
Remark 4 If the Eq. (7) has no delay item and no Volterra integral, it becomes fractional Fredholm integro-differential equation [8,11].
Remark 5 If the Eq. (7) has no delay item, no Volterra and no Fredholm integrals, it becomes fractional differential equation [5,9,11,16].
Remark 6 If the Eq. (7) has linear function of constant delay item, it becomes fractional Volterra-Fredholm integro-differential equation [15].
The benefit of modified several methods is that it successfully contributed to the rapidly progressing of the exact, approximate and numerical solutions. Also, modified methods are considered as a new powerful technique to solve a large range of equations such as differential, integral and integro-differential. At a certain value of α = 0.75 the approximate solution is equal to the exact solution. Also, the analogy between the exact and approximate solution differs from an example to others.
Acknowledgement: The authors are very grateful to the editors and reviewers for carefully reading the paper and for their comments and suggestions which have improved the paper.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. Abdo, M. S., Panchal, S. K. (2019). Fractional integro-differential equations involving ψ-hilfer fractional derivative. Advances in Applied Mathematics and Mechanics, 11(1), 1–22. DOI 10.4208/aamm.OA-2018-0143. [Google Scholar] [CrossRef]
2. Ahmed, S. A., Elzaki, T. M. (2018). On the comparative study integro-differential equations using difference numerical methods. Journal of King Saud Univeristy-Science, 1–6. DOI 10.1016/j.jksus.2018.03.003. [Google Scholar] [CrossRef]
3. Akinola, E. I., Olopade, I. A., Akinpelu, F. O., Areo, A. O., Oyewumi, A. A. (2016). Sumudu transform series decomposition method for solving nonlinear volterra integro-differential equations. International Journal of Innovation and Applied Studies, 18(1), 262–267. [Google Scholar]
4. Al-Khaled, K., Yousef, M. H. (2019). Sumudu decomposition method for solving higher-order nonlinear volterra fredholm fractional integro-differential equations. Journal of Nonlinear Dynamics and Systems Theory, 19(3), 348–361. DOI 101155/JAMSA/2006/91083. [Google Scholar]
5. Asiru, M. A. (2010). Further properties of the sumudu transform and its applications. International Journal of Mathematical Education in Science and Technology, 33(3), 441–449. DOI 10.1080/002073902760047940. [Google Scholar] [CrossRef]
6. Bulut, H., Bakonus, H. M., Belgacem, F. M. (2013). The analytical solution of some fractional ordinary differential equation by the sumudu transform method. Journal of Abstract and Applied Analysis, 2013, 1–6. DOI 10.1155/2013/203875. [Google Scholar] [CrossRef]
7. Chen, A. (2020). The efficient finite element methods for time-fractional oldroyd-B fluid model involving two caputo derivatives. Computer Modeling in Engineering & Sciences, 125(1), 173–195. DOI 10.32604/cmes.2020.011871. [Google Scholar] [CrossRef]
8. Elbeleze, A. A., Kilicman, V., Taib, B. M. (2016). Modified homotopy perturbation method for solving linear second-order fredholm integro-differential equations. Filomat, 30(7), 1823–1831. DOI 10.2298/FIL1607823E. [Google Scholar] [CrossRef]
9. Gubes, M. (2018). A new calculation technique for the laplace and sumudu transforms by means of the varitional iteration method. Journal of Mathematical Sciences, 2019(13), 21–25. DOI 10.1007/s40096-018-0273-1. [Google Scholar] [CrossRef]
10. Ismail, F., Qayyum, M., Inayat, S. (2020). Fractional analysis of thin film flow of non-newtonian fluid. Computer Modeling in Engineering & Sciences, 124(3), 825–845. doi:10.32604/cmes.2020.011073. [Google Scholar] [CrossRef]
11. Kadem, A., Kilicmam, A. (2012). The approximate solution of fractional fredholm integrodifferential equations by variational iteration and homoptopy perturbation methods. Abstract and Applied Analysis, 2012, 1–10. Hindawi. DOI 10.1155/2012/486193. [Google Scholar] [CrossRef]
12. Kilicman, A., Gadain, H. E. (2010). On the applications of laplace and sumudu transforms. Journal of Franklin Institute, 347, 848–862. DOI 10.1016/j.jfranklin.2010.03.008. [Google Scholar] [CrossRef]
13. Kumar, D., Singh, J. (2011). Homotopy perturbation sumudu transform method for nonlinear equations. Journal of Advances in Theoretical and Applied Mechanics, 4(4), 165–175. DOI 10.1063/1.5041640. [Google Scholar] [CrossRef]
14. Tari, A. (2013). An approximate method for system of nonlinear volterra integro-differential equations with variable coefficients. Journal of Sciences, Islamic Republic of Iran, 24(1), 71–79. DOI 10.1016/j.apnum.2011.03.007. [Google Scholar] [CrossRef]
15. Raslan, K. R., Ali, K. K. (2019). Adomain decomposition method (ADM) for solving the nonlinear generalized regularized long wave equation. Numerical and Computational Methods in Sciences & Engineering an International Journal, 1(1), 41–55. DOI 10.18576/ncmse/010105. [Google Scholar] [CrossRef]
16. Soliman, A. A., Raslan, K. R., Abdallah, A. M. (2021). Analysis for fractional integro-differential equation with time delay. Italian Journal of Pure and Applied Mathematics, 46, 989–1007. [Google Scholar]
17. Taha, M. H., Ramadan, M. A., Baleanu, D., Moatimid, G. M. (2020). A novel analytical technique of the fractional bagley-torvik equations for motion of a rigid plate in newtonian fluids. Computer Modeling in Engineering & Sciences, 124(3), 969–983. DOI 10.32604/cmes.2020.010942. [Google Scholar] [CrossRef]
18. Yang, X. J. (2019). General fractional derivatives: Theory, methods and applications. New York: CRC Press. [Google Scholar]
19. Ziane, D., Baleanu, D., Belghaba, K., Hamdi Cherif, M. (2019). Local fractional sumudu decom-position method for linear partial differential equations with local fractional derivative. Journal of King Saud University Science, 31(1), 83–88. DOI 10.1016/j.jksus.2017.05.002. [Google Scholar] [CrossRef]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |