 Submit a Paper
Submit a Paper Open Access
Open Access
PROCEEDINGS

Electrochemical Pneumatic Battery for Compact, Efficient, and Silent Robotic Actuation
1 School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore, 639798, Singapore
2 CINTRA CNRS/NTU/THALES, UMI 3288, Research Techno Plaza, Singapore, 637553, Singapore
* Corresponding Author: Hong Li. Email:
The International Conference on Computational & Experimental Engineering and Sciences 2025, 33(4), 1-3. https://doi.org/10.32604/icces.2025.011446
 Download PDF
Download PDFAbstract
The advancement of untethered and adaptive robotic systems necessitates the development of compact, efficient, and silent pneumatic power sources [1,2]. Traditional pneumatic actuation relies on bulky compressors or external gas reservoirs, limiting their practical applications in mobile and autonomous systems [3,4]. This work presents a novel electrochemical pneumatic battery (EPB) that exploits electrochemical driven gas generation to achieve controlled and energy-efficient pneumatic actuation, offering a viable alternative to conventional air supply methods. The EPB operates through an electrochemical redox mechanism based on a zinc-oxygen battery [5–7], enabling reversible gas storage and controlled pressure modulation. This motor-free and self-contained system eliminates the reliance on mechanical pumps, allowing for seamless integration into robotic platforms. The battery design incorporates zinc nanowire anodes which is fabricated with our rapid room temperature ultrasonic nanoimprinting technique [8], which enhance reaction kinetics, improve gas generation efficiency, and lead to faster response times, higher energy density, and extended operational lifespan. Unlike conventional pneumatic pumps which only can provide vacuum or high pressure, EPB achieves a pressure range from -0.98 to 7 bar, offering both positive and negative pressure control, making it versatile for robotic applications requiring both vacuum and inflation-based actuation.The applicability of EPB is demonstrated across various robotic domains, including both soft and rigid robotic actuators, modular robotic systems, and grippers, as shown in Fig.1. A detailed evaluation of its pressure regulation, energy consumption, cyclic stability, and scalability is conducted, providing insights into its practical deployment in wearable robotics, industrial automation, and bio-inspired systems. Its capability to drive grippers, flexible actuators, and morphing structures without external air sources significantly improves system mobility and efficiency. The system’s flexibility allows its integration into smart materials and robotic matter, where structural components themselves can serve as pneumatic power sources, enabling compact and autonomous robotic designs.
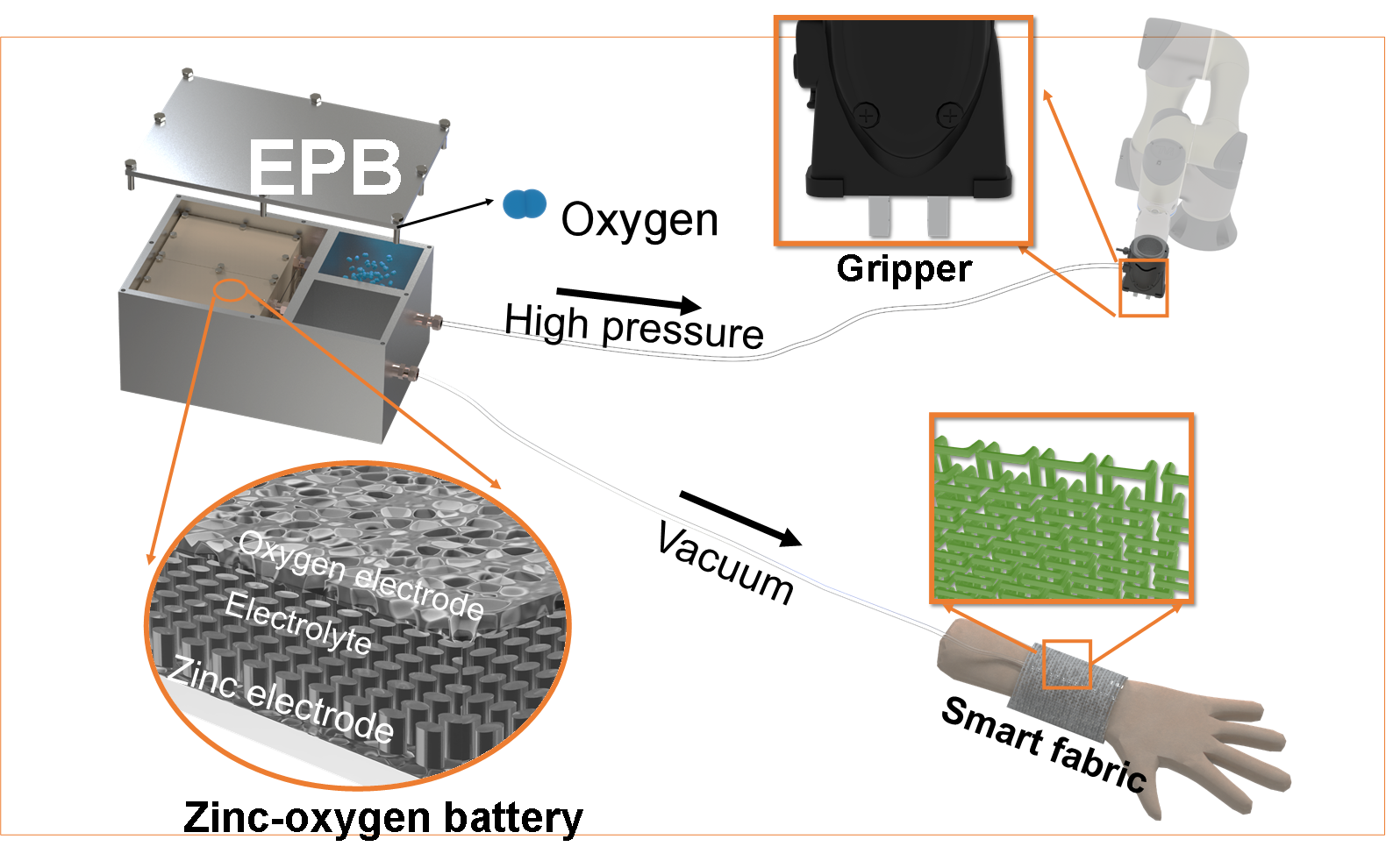
Figure 1: Schematics of EPB structure and applications
Comparative analysis with traditional pneumatic sources highlights EPB’s significant reduction in energy expenditure, noise generation, and footprint, making it an ideal solution for untethered robotic applications. Furthermore, its compatibility with emerging robotic technologies, such as origami-inspired actuators [8], artificial muscles [9], and hybrid soft-rigid systems [10], expands its potential applications beyond traditional robotic actuation.
By integrating electrochemical pneumatics with robotic architectures, this work presents a transformative step toward the realization of self-sufficient robotic actuation systems. Future research will focus on optimizing electrochemical reaction rates, improving the durability of electrode materials, increasing gas generation efficiency, and exploring hybrid actuation paradigms to further expand its capabilities in next-generation robotics. Additionally, efforts will be directed toward developing miniaturized and flexible EPBs for biomedical and assistive robotic applications, offering a sustainable and energy-efficient alternative to conventional pneumatic actuation.
Keywords
Electrochemical pneumatic battery; adaptive robotic actuation; ion-driven pneumatics; untethered robotics; wearable robotics; energy-efficient automation
Cite This Article
APA Style
Ge, J., Wang, Y., Li, H. (2025). Electrochemical Pneumatic Battery for Compact, Efficient, and Silent Robotic Actuation. The International Conference on Computational & Experimental Engineering and Sciences, 33(4), 1–3. https://doi.org/10.32604/icces.2025.011446
Vancouver Style
Ge J, Wang Y, Li H. Electrochemical Pneumatic Battery for Compact, Efficient, and Silent Robotic Actuation. Int Conf Comput Exp Eng Sciences. 2025;33(4):1–3. https://doi.org/10.32604/icces.2025.011446
IEEE Style
J. Ge, Y. Wang, and H. Li, “Electrochemical Pneumatic Battery for Compact, Efficient, and Silent Robotic Actuation,” Int. Conf. Comput. Exp. Eng. Sciences, vol. 33, no. 4, pp. 1–3, 2025. https://doi.org/10.32604/icces.2025.011446
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools