
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

A Review of Device-Free Indoor Positioning for Home-Based Care of the Aged: Techniques and Technologies
1 College of Electronic and Information Engineering, Shandong University of Science and Technology, Qingdao, 266590, China
2 School of Computer Science and Technology, Henan Polytechnic University, Jiaozuo, 454000, China
* Corresponding Authors: Geng Chen. Email: ; Shuihua Wang. Email:
(This article belongs to the Special Issue: Computer Modeling of Artificial Intelligence and Medical Imaging)
Computer Modeling in Engineering & Sciences 2023, 135(3), 1901-1940. https://doi.org/10.32604/cmes.2023.024901
Received 12 June 2022; Accepted 18 August 2022; Issue published 23 November 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
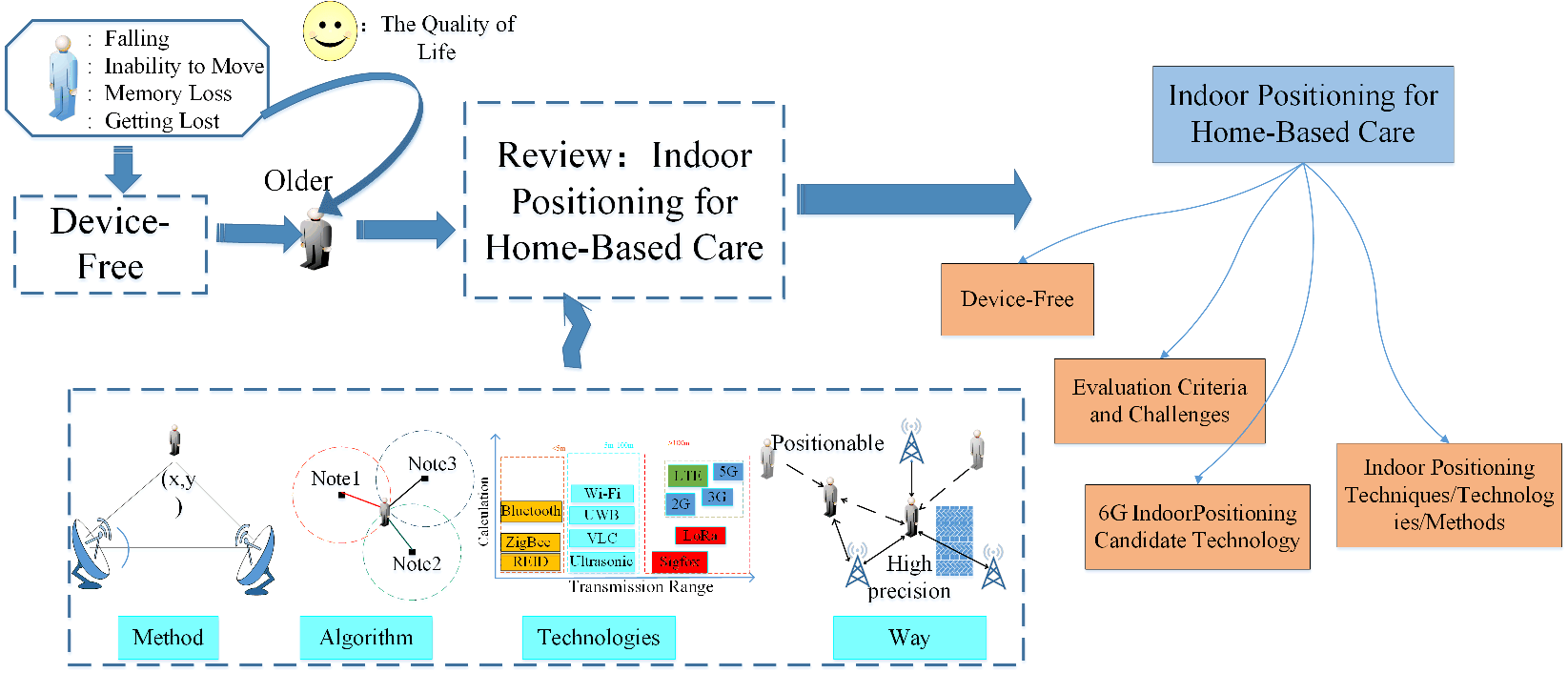
With the development of urbanization, the problem of neurological diseases brought about by population aging has gradually become a social problem of worldwide concern. Aging leads to gradual degeneration of the central nervous system, shrinkage of brain tissue, and decline in physical function in many elderlies, making them susceptible to neurological diseases such as Alzheimer’s disease (AD), stroke, Parkinson’s and major depressive disorder (MDD). Due to the influence of these neurological diseases, the elderly have troubles such as memory loss, inability to move, falling, and getting lost, which seriously affect their quality of life. Tracking and positioning of elderly with neurological diseases and keeping track of their location in real-time are necessary and crucial in order to detect and treat dangerous and unexpected situations in time. Considering that the elderly with neurological diseases forget to wear a positioning device or have mobility problems due to carrying a positioning device, device-free positioning as a passive positioning technology that detects device-free individuals is more suitable than traditional active positioning for the home-based care of the elderly with neurological diseases. This paper provides an extensive and in-depth survey of device-free indoor positioning technology for home-based care and an in-depth analysis of the main features of current positioning systems, as well as the techniques, technologies and methods they employ, from the perspective of the needs of the elderly with neurological conditions. Moreover, evaluation criteria and possible solutions of positioning techniques for the home-based care of the elderly with neurological conditions are proposed. Finally, the opportunities and challenges for the development of indoor positioning technology in 6G mobile networks for home-based care of the elderly with neurological diseases are discussed. This review has provided comprehensive and effective tracking and positioning techniques, technologies and methods for the elderly, by which we can obtain the location information of the elderly in real-time and make home-based care more comfortable and safer for the elderly with neurological diseases.Graphic Abstract
Keywords
Worldwide, populations are aging at an alarming rate [1]. The phenomenon of population aging [2] has attracted the attention of scholars around the world for decades. The international common view is that when the elderly population over 60 years old accounts for 10% of the total population, or the elderly population over 65 years old accounts for 7% of the total population in a country or region, it means that the country or region is in an aging society. According to the United Nations, the World Bank, and the Chinese National Bureau of Statistics population statistics [3], it is revealed that the proportion of the world and the Chinese elderly population is increasing, as shown in Figs. 1 and 2. On this trend, the number of the elderly population over 65 years old worldwide is expected to more than double by 2050. Based on the rate of data growth in the past ten years, the proportion of the elderly population over 65 years old is projected to increase from 10.02% in 2022 to approximately 16.0% in 2050 [4]. As the country with the largest population in the world, China has a higher elderly population and a higher proportion of the elderly population than the world, and the problem of aging is becoming increasingly serious.
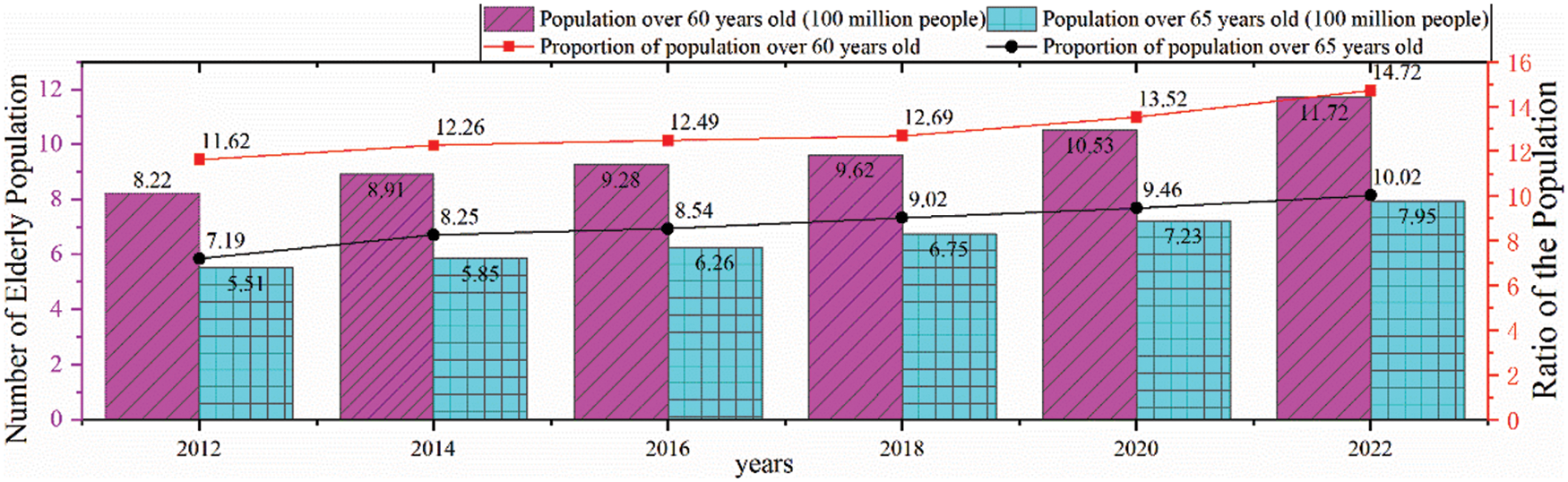
Figure 1: Global elderly population and proportion from 2012 to 2022
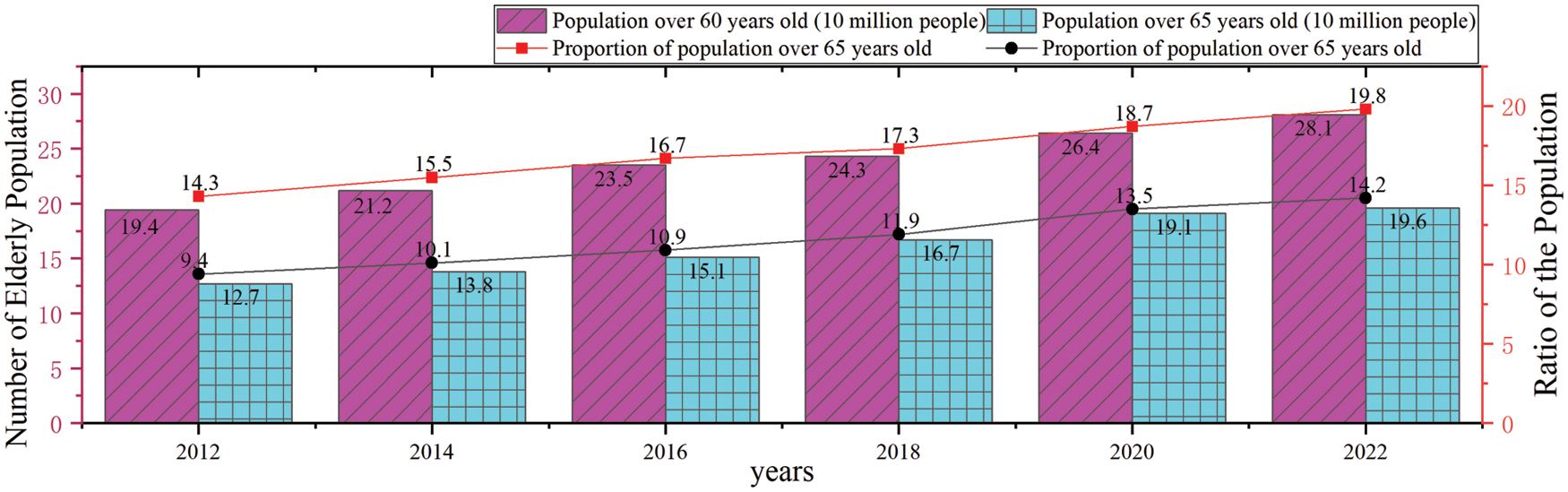
Figure 2: Chinese elderly population and proportion from 2012 to 2022
At present, home-based care for the older is still the main way of providing for the aged in the world, and most elderly like to enjoy their old age at home, which has derived the “demands for home-based care of the aged”. With the accelerated pace of life and the process of globalization, many young people leave their parents to work and live elsewhere, resulting in aging parents living alone. The first research report on the development of senior care real estate in China released by the China Academy of Urban Economics pointed out that the number of empty-nest families in the urban elderly has reached 52.3%, meanwhile, the number of empty-nest families in the rural elderly has reached 49.8% [5]. As the age of the elderly increases, their physical function of the elderly continues to decline, their self-care ability deteriorates, nerve function is not controlled, and electroencephalogram (EEG) [6] signals become abnormal, accompanied by many diseases. For example, stroke [7], MDD [8], Alzheimer’s disease [9,10], etc. In this situation, there is a growing need for intelligent healthcare systems, especially artificial intelligence and machine learning [11,12]. Nasr et al. [11] aimed to discuss the current state-of-the-art smart healthcare systems, like wearable and smartphone devices for health monitoring, machine learning for disease diagnosis, and assistive frameworks. And the modularity of smart healthcare and the systematization of software architectures for smart healthcare is proposed as the future development direction. Lee et al. [13] provided a convolutional neural network (CNN) based human-activity identification that is classified by real-time actions, allowing patients to implement the home-based care rehabilitation program by themselves. Among the Internet of Things (IoT), the trend of employing convolutional neural networks for human activities is positive and the dataset has evolved from CIFAR to MNIST, which has achieved unprecedented success in the field of vision [13,14]. Moreover, falls, gas leaks, heatstroke, and suffocation could happen due to high room temperature in summer and other problems often occur in the elderly [15]. More and more young people hope that although they are not at home, they can keep knowing the situation at home, such as the elderly have neurological diseases attack, falls and encounter gas leakage, etc., they can be informed of the situation and take measures. A survey of 200 elderly patients over the age of 60 in a hospital showed that the probability of falls in the elderly was 35.3%, and 67.2% of falls occurred indoors [16]. Data showed that most of the deaths caused by falls are not directly caused by the fall itself, but have not received timely and effective medical treatment, such as the elderly falling on the ground and being unable to get up or losing consciousness after a fall [17]. Therefore, a fall detection system is very necessary. We reviewed the most recent and effective deep learning methods for fall detection and categorized them into three categories: convolutional neural network (CNN) based systems, long short-term memory (LSTM) based systems, and Auto-encoder based systems [18]. Sheikh et al. [19] designed a complete algorithm for the detection of genuine falls. In the proposed system for detection of falling, the elderly patient’s acceleration data are continuously acquired by using a wearable sensor and stored on a cloud server, using an IoT board. After completing the fall detection, the accurate positioning of the elderly for home-based care is also essential. Based on accurate positioning, add auxiliary functions such as help and alarm, which can provide timely and comprehensive protection for the life safety of the elderly. The indoor positioning for home-based care of the aged can send alarm information to their relatives and accurately provides the location information of the elderly in emergencies meets the needs of society today and has good practical value and market prospects.
With the popularization of Internet of things technology, the IoT device capabilities, architectures, and protocols are getting more popular, which provides an in-depth overview of the potential healthcare applications [20]. IoT healthcare monitoring system has gradually developed in the direction of intelligence, efficiency, and convenience [21]. The crucial challenge that we come across in IoT applications is that they process a huge quantity of information and data which should be distributed accurately. In the future, we need further development of the new methods and techniques required to process the diverse data streams generated from IoT devices, healthcare smart systems, intelligent environments, and complex industrial systems [22]. The development of an IoT intelligent medical system also provides the direction for the accurate positioning for home-based care [21,22]. Due to people’s daily behavior, the indoor environment changes at any time, which makes the traditional positioning technology difficult to meet the needs of accurate positioning. Meanwhile, the propagation of global positioning system (GPS) signals [23,24] is affected by buildings and obstacles, which makes it impossible to obtain ideal positioning results when applied to the indoor positioning of the elderly. In recent years, many scholars have studied a series of technologies that do not use GPS for indoor positioning, providing a lot of technical support for smart elderly care. Moreover, there are tens of thousands of companies in the world that have extended the positioning technology industry to smart elderly care, such as Zhong Haida, Inpixon, Heng Hi-Tech, Indoor Run indoor positioning, and other companies that have developed indoor positioning applications in smart care of age, and have relatively mature scheme [25]. For example, finding the geometric configuration of Wi-Fi Apps using multidimensional scaling (MDS) techniques, but the computation requirement of this scheme is too expensive and needs wearing positioning devices. However, the elderly at home will increase the burden of action because of wearing positioning devices, and the elderly with memory loss will often forget to wear the positioning device so that the active positioning system that requires wearable devices loses its expected effect. Fortunately, the device-free indoor positioning technology can solve this problem well. Since the elderly at home do not need to wear positioning equipment, device-free indoor positioning will not have any impact on the daily life of the elderly. Furthermore, device-free indoor localization techniques are combined with many intelligent algorithms such as machine learning [26,27] and genetic algorithms [28], which improve the accuracy of indoor positioning, push the development of the Internet of Things and promote the development of the home care industry. From the perspective of home-based care, we proposed a safer and feasible solution, provide more mature technical support for solving the problem of home-based care caused by population aging, and make a more systematic evaluation standard from reality. We recommend the best methods and technologies according to the actual situation of home-based care to help researchers choose and apply appropriate methods and technologies. Considering the rapid development of indoor positioning systems, which led to the annual update of the review, we summarized the latest technologies up to 2022 and discussed the practical challenges.
This review conducts a wide range of in-depth investigations of device-free indoor positioning technology. Evaluation criteria and possible solutions of positioning techniques for the home-based care of the elderly with neurological diseases are proposed. The main contributions of this paper are summarized as follows:
(1) From the perspective of the needs of the elderly, the main characteristics of the current home care positioning system, as well as the techniques, technologies, and methods are deeply analyzed. We can recommend the best methods and technologies according to the actual situation of home-based care, which provides more mature technical support for solving the problem of home-based care caused by population aging.
(2) Considering that wearing positioning devices increases the mobility burden of the elderly with neurological diseases, we choose the device-free positioning technology and systematically introduce it. The device-free positioning technology proposed a safer and more feasible solution for home-based care.
(3) The evaluation criteria and feasible solutions of home-based care indoor positioning technology and its development opportunities and challenges in the 6G mobile communication network are discussed. This provides more systematic theoretical support for home-based care.
In a word, the main contribution of this paper lies in the evaluation index of indoor positioning for the elderly with mobility difficulties and the development prospect of the application of device-free positioning to the elderly. Different from previous work, this paper systematically analyzes the application and market of device-free positioning home-based care for the elderly and the development of 6G in the future.
The overall workflow of the reviewed systems is in Fig. 3. In Fig. 3, the comprehensive review of device-free indoor positioning for home-based care is divided into four major aspects: device-free indoor positioning, indoor positioning techniques, technologies and methods, evaluation criteria and challenges, and 6G indoor positioning candidate technologies. The remainder of the paper is organized as follows. Section 2 introduces the concepts and methods of device-free positioning. In Section 3, the main methods, algorithms, techniques, etc., of indoor positioning are introduced. Section 4 is divided into two subsections, first defining the evaluation metrics of indoor positioning for home-based care of the elderly, and then discussing key challenges and existing solutions. Section 5 introduces the development potential of home-based care for the elderly, as well as the opportunities and risks under the 6G mobile communication [29,30]. The last section presents the main conclusions of the study and discusses future work.
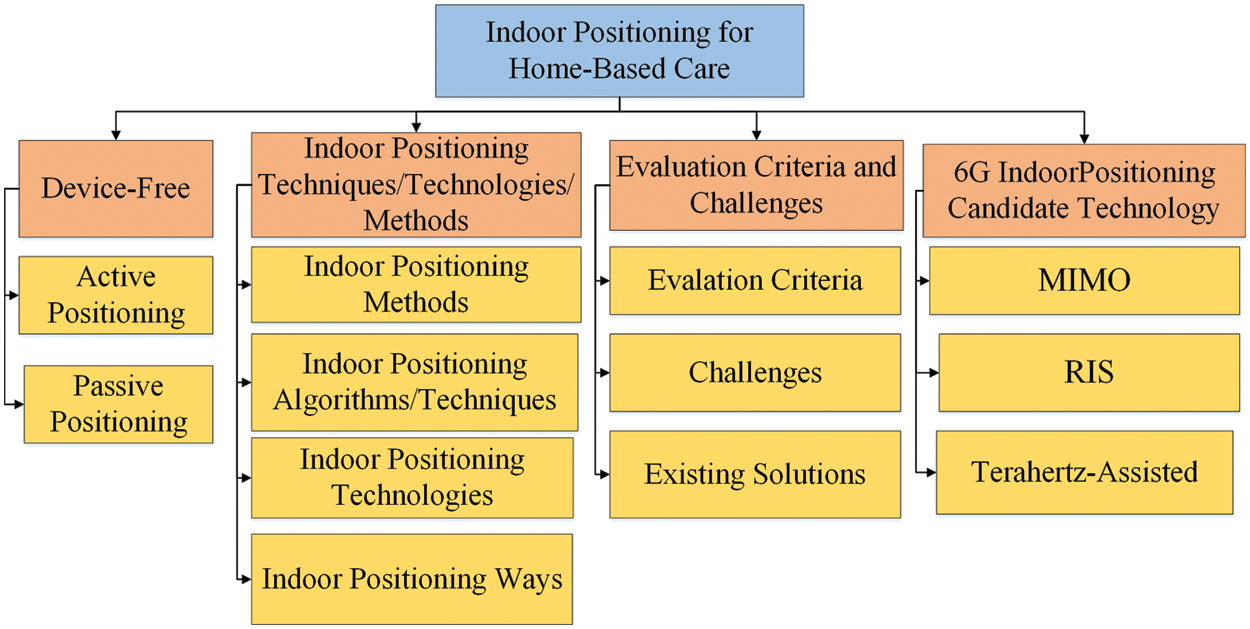
Figure 3: The overall workflow of the device-free indoor positioning for home-based care
2 The Concept and Method of Device-Free Indoor Positioning
This section mainly introduces the concepts and methods of device-free positioning, which are generally divided into active positioning and passive positioning, as shown in Fig. 4.
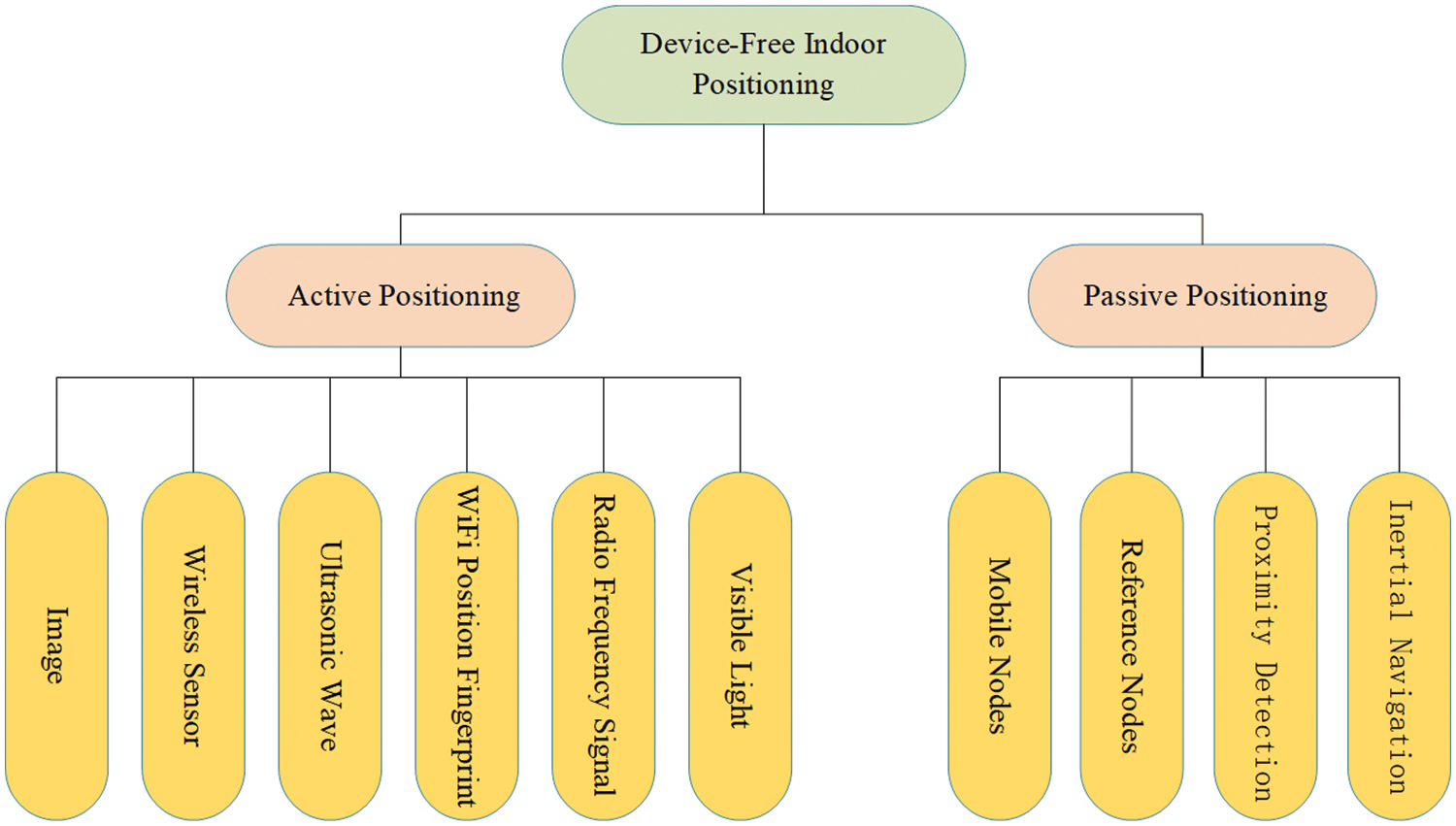
Figure 4: Device-free positioning classification
Active positioning means that the target should be equipped with a positioning device before positioning, and then the target device should be positioned.
Active positioning has a wide range of applications in daily life, such as animal trajectory tracking, autonomous driving, and many other applications. Regarding active positioning, the current mainstream research directions include image positioning [31], wireless sensor [32], ultrasound wave [33], Wi-Fi position fingerprint [34], radio frequency signal [35], and visible light [36]. However, for many scenarios, having the target carry the positioning device is difficult to achieve. Because most of the elderly at home have problems such as the inconvenience of movement and memory loss, it has become a big problem to wear positioning devices on time every day. At the same time, the loss or damage of these wearable devices and the battery life of the device should also be considered. Furthermore, unfamiliarity or resistance to smart products makes some elderly reluctant to wear positioning devices.
Passive positioning, because the positioning target does not need to carry a positioning device, is also called device-free positioning (DFL) [37]. Passive positioning is a boon for the elderly and the visually impaired [38] because the elderly can not wear the equipment used to locate them and only need people to set up the positioning environment in advance. The main passive positioning methods are sensors [39], visual positioning [40], visible light positioning (VLP) [41], passive RFID tag [42], and so on.
2.2.1 Positioning Based on Mobile Nodes
Due to the shortcomings of traditional mobile positioning algorithms, Tian et al. proposed an improved mobile anchor node positioning algorithm-SCAN_ET [43]. The algorithm divides the area where the node needs to be located into several small areas. Moreover, the key of this algorithm is to move the anchor node to detect whether there are unknown nodes that need to be located in each local small area. On the one hand, if there are unknown nodes in some small areas, the mobile anchor nodes move along the edges of the triangles in these areas, and then the anchor nodes transmit wireless signals at the vertices of these triangles. Conversely, if there are no unknown nodes in the regions, the mobile anchor nodes move linearly in these regions until the unknown nodes are detected or the entire region is walked. When the mobile anchor node moves in the positioning area, it completes the positioning of all unknown nodes. Compared with the PI algorithm [44] and the LMAT algorithm [45], SCAN_ET can quickly and efficiently locate unknown nodes. Meanwhile, since the moving distance of the mobile anchor node is shorter, the service life of SCAN_ET is effectively extended. In home-based care, when the elderly move in the positioning area, the positioning based on mobile nodes can quickly and efficiently locate the elderly moving, which can facilitate efficiency to handle emergencies for loss. Meanwhile, the mobile node-based positioning algorithm has a long service life and low power consumption, which is popular in home-based care.
2.2.2 Positioning Based on Reference Nodes
The choice of reference nodes has a significant impact on the accuracy of position. The position of the target is determined by measuring the distance between the positioning target and the reference node [46]. There are many methods to measure the distance between the positioning target and the reference node, such as received signal strength (RSS) [47], time of arrival (TOA) [48], and angle of arrival (AOA) [49]. If better positioning accuracy is obtained, more reference nodes need to be used and more resources are consumed. Conversely, if the consumed resources are reduced, the reference nodes will be reduced, however, it will reduce the accuracy of positioning.
In response to these problems, Nomura et al. proposed a method based on hierarchical clustering [50]. This method narrows down reference nodes for position estimation by considering the positional bias of the reference nodes, reducing the number of reference nodes required for target positioning. Under the premise that the positioning target is in a specific area, the selection of the reference node position in the area is studied [51], and the best placement position of the reference node is obtained. However, this method is not suitable for scenarios where movable reference nodes are applied [52]. In their proposed method, the reference node determination process is as follows. First, the location information of each reference node is collected, the information is hierarchically clustered, and a clustering tree of reference nodes is created. Then, when positioning a target, a reference node that can communicate with the locating target is found from the clustering tree. In this way, the unused reference node information is discarded. Finally, for each cluster, determine their reference nodes. This method effectively reduces the number of reference nodes and the positioning error. This device-free positioning method can effectively reduce the number of reference nodes and reduce energy consumption while ensuring positioning accuracy, it can reach the precise positioning of the elderly for home-based care.
2.2.3 Positioning Based on Proximity Detection
Proximity detection is also an important research direction in indoor positioning. Although the existing technology cannot meet the requirements of high accuracy, low cost, and high practicability, considering the special nature of home-based care, it can still be applied to the elderly to send alarm information across a specific area. The iBeacon technology of Apple has become mainstream in this field and has almost become the industry standard based on proximity detection service, although its detection accuracy is poor.
To address the problem of accuracy in current proximity detection methods, Zafari et al. proposed two server-based algorithms [53]. The one is to compute the average value with sense-reason-act (SRA) programming on the server-side, which uses the estimated distance based on the path loss model for proximity classification and is suitable for environments with less interference and noise. The second is to use the sparse kalman filter (SKF) algorithm on the server-side and use the SKF in combination with the SRA, which is suitable for environments with large interference and noise. The above two methods can effectively improve detection accuracy.
2.2.4 Positioning Based on Inertial Navigation
Due to the complexity and uncertainty of the indoor positioning environment, it is difficult to obtain the accurate position of the target. The development of inertial navigation technology and wireless sensor device provides a new research direction for it [54].
Li et al. [55] combined inertial sensor positioning system and kalman filter (KF) algorithm to obtain object displacement direction, and get the position information of the object according to the distance estimation algorithm, which has high positioning precision and good stability in a short time. The inertial sensor is worn for the positioning target to collect the attitude information of the moving target, the moving direction of the target is obtained by combining the KF algorithm, and the position information of the target is obtained by using the distance calculation formula. In the complex indoor environment, the errors of their two test results are within 10 cm. In addition, this method has great positioning accuracy and high stability within a certain period, but this method is only suitable for the short-term positioning of targets with high mobility. Considering that this method can only perform short-term positioning, it is not suitable for indoor positioning of home-based care.
3 Indoor Positioning Techniques, Technologies and Methods
With the development of mobile communication technologies, due to the complexity of the indoor environment, there are many positioning methods to apply the positioning of unknown nodes in the indoor environment and there are great differences in positioning techniques, technologies, and methods. This section will discuss the positioning techniques, technologies, and positioning methods for the position of the elderly.
3.1 Indoor Positioning Methods for the Home-Based Care
There are many methods for indoor positioning [56]. Regardless of the localization method used, the key to the localization method is the need for one or more reference points with known coordinates and the determination of the spatial location relationship between the unknown nodes and the known reference points [57]. The localization process can be divided into two parts measuring the position information and determining the target position based on the measurement information [58]. The main positioning method is shown in Fig. 5 below.
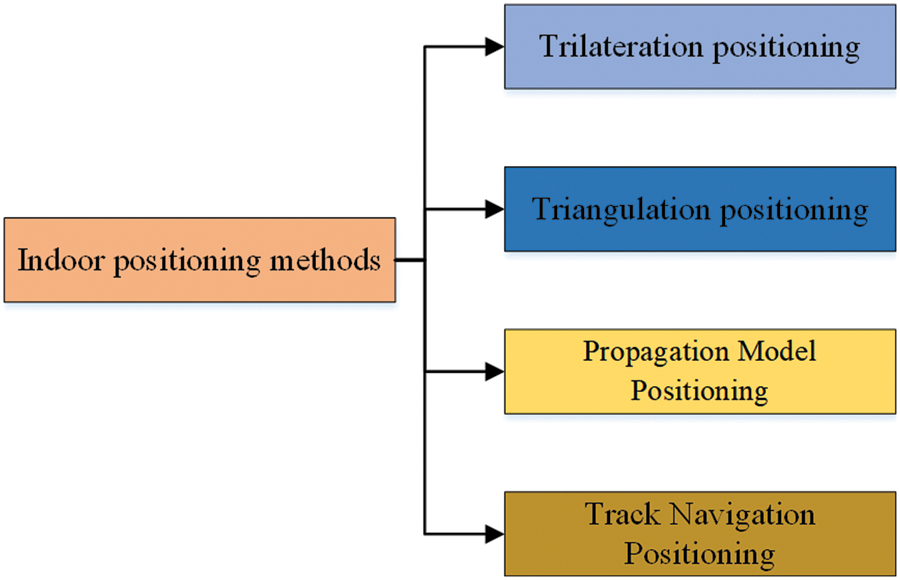
Figure 5: Indoor positioning methods for home-based care
3.1.1 Trilateration Positioning
The trilateration measuring positioning is also called multi-point positioning. The positioning steps on the two-dimensional plane are as follows. Firstly, we take three reference points, taking each reference point as the center, and using the distance of the target nodes as the radius to draw the circle. The target node must be on the ground. Secondly, the position of the intersection area of the three circles on the plane is the target node position. Finally, the minimum multiplication method is used to reduce the positioning error of the unknown node. The positioning model is shown in Fig. 6.
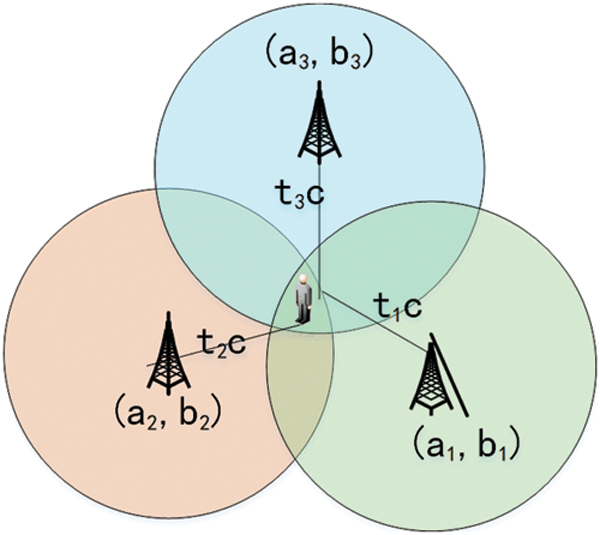
Figure 6: Trilateration positioning
Therefore, at least three fixed anchor nodes are taken in the actual application, and as the number of fixed anchor nodes increases, the accuracy and reliability of the system will also increase [59]. Among them, fixed anchor nodes are
3.1.2 Triangulation Positioning
After getting the angle of the received signal the azimuth and pitch angles between the target node and the reference node are obtained by the AOA technique, which are determined based on the direction of the main axis of the receiving node. This method can estimate the location information of the target node based on the angle
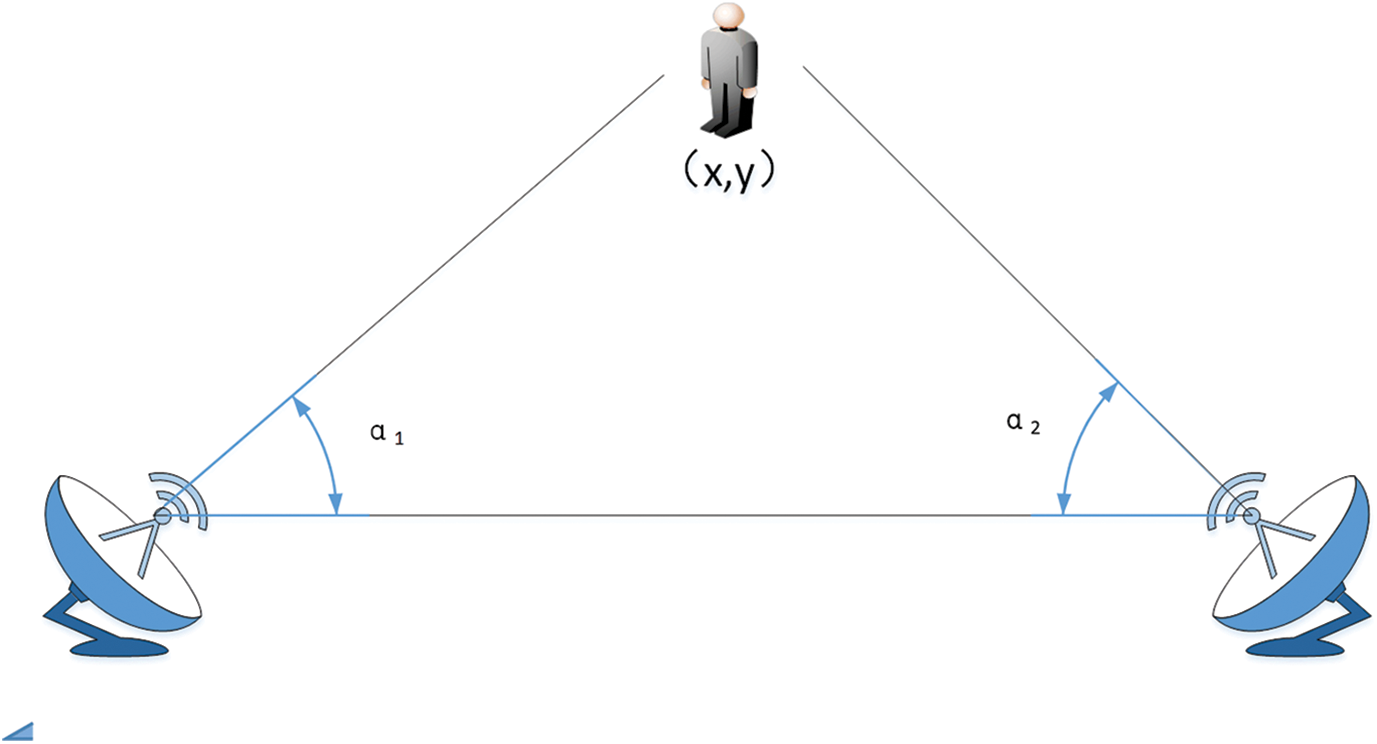
Figure 7: Triangulation positioning
3.1.3 Propagation Model Positioning
In the positioning method based on matching, in this propagation model positioning method, the signal-based intensity is used for ranging [63]. The radio frequency signal positioning of wireless communication is located without additional devices. The positioning model is shown in Fig. 8 below.
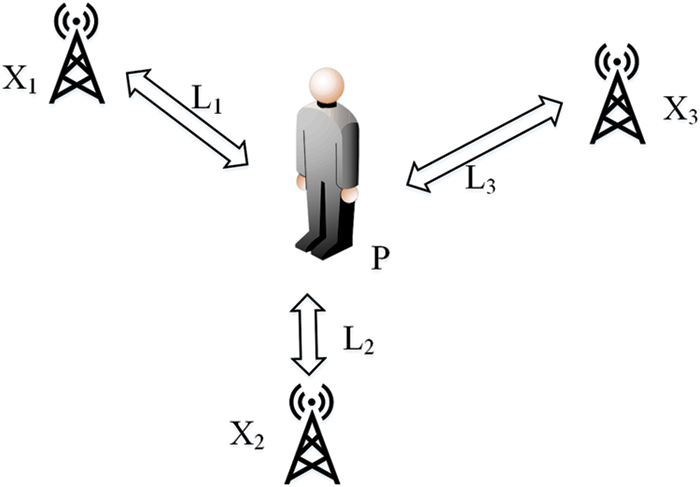
Figure 8: Positioning model positioning
Among them,
where,
Indoor communication channels can be divided into two categories, divided into line-of-sight (LOS) and non-line-of-sight (NLOS) [65]. The LOS indicates that there is a direct view between the transmitter and the receiver. NLOS said that due to different obstacles such as walls, furniture, windows, personnel, flooring, and ceiling, there is no direct view between the transmitter and the receiver. Huang et al. [65] investigated machine learning techniques for LOS identification in vehicle-to-vehicle (V2V) networks using an extensive set of measurement data, the results show this technique can distinguish the LOS/NLOS conditions with an error rate as low as 1%. Many studies have obtained different methods for the spread of indoor radio waves. The following describes the two most widely used communication models.
Single sloping model. A simple communication model of dissemination loss and distance between the dissemination loss and distance, which is very easy to use and implement. The loss function is given by (2). Among them, the
Dual sloping model. Similar to the propagation model of a single sloping model (the difference is to calculate the path of the dissemination loss), it is divided into two parts, as shown in (3). The first is the distance less than
Among them,
Its signal calculation method is to regard the signal strength characteristics as “fingerprints”, arrange N nodes in advance, measure the signal strength of N reference nodes, get the N-dimensional vector, and then measure the characteristics of each position in the region. The vector “fingerprint” compares the characteristic vector and feature vector database measured by the target to find out the most similar fingerprint corresponding position. The disadvantage is that it cannot correspond to dynamic changes, but the use signal-based dynamic positioning methods of Land Marc can solve this problem. In addition, fingerprint recognition is a time-consuming and labor-intensive process, and because it depends on the predefined map, any change in the environment needs to be re-mapped, so a series of mapping problems are generated. Here are several latest methods to solve this problem.
Researchers introduce a no-map method to solve the mapping problem, such as simultaneous localization and mapping (SLAM) algorithm and intelligent probability-fingerprint (PFP). Atia et al. [67] proposed a positioning system based on a zero-configuration RSS of Wi-Fi to eliminate the offline training phase. This stage does not require the previous building map. If the number of access points increases, it can reach an accuracy of 2–3 meters.
3.1.4 Track Navigation Positioning
Track navigation positioning method is to start from the initial point. You need to determine the direction of travel and add exercise data to find the position of the next point. This technology relies on the built-in sensors of modern smartphones, such as acceleration meter, gyroscope, magnetic meter, etc., which contain a large amount of instantaneous motion measurement information. With the inertial measurement units (IMU) of these smartphones, it is possible to abstract the movement state of the user [68]. Through inertial navigation positioning, pedestrian dead reckoning (PDR) [69] can be supplemented as the positioning of other methods, which can get better positioning accuracy [70,71].
3.2 Indoor Positioning Algorithm/Technique for the Home-Based Care
As shown in Fig. 9, Indoor positioning algorithms for home-based care can be broadly classified into non-cooperative positioning algorithms, cooperative positioning algorithms. There are three types of non-cooperative positioning algorithms, which are distance-based positioning algorithms, direction-based and angle-based positioning algorithms and signal-based positioning algorithms. The cooperative positioning algorithms are Bayesian algorithm and Factor-Graph-Based Algorithm.
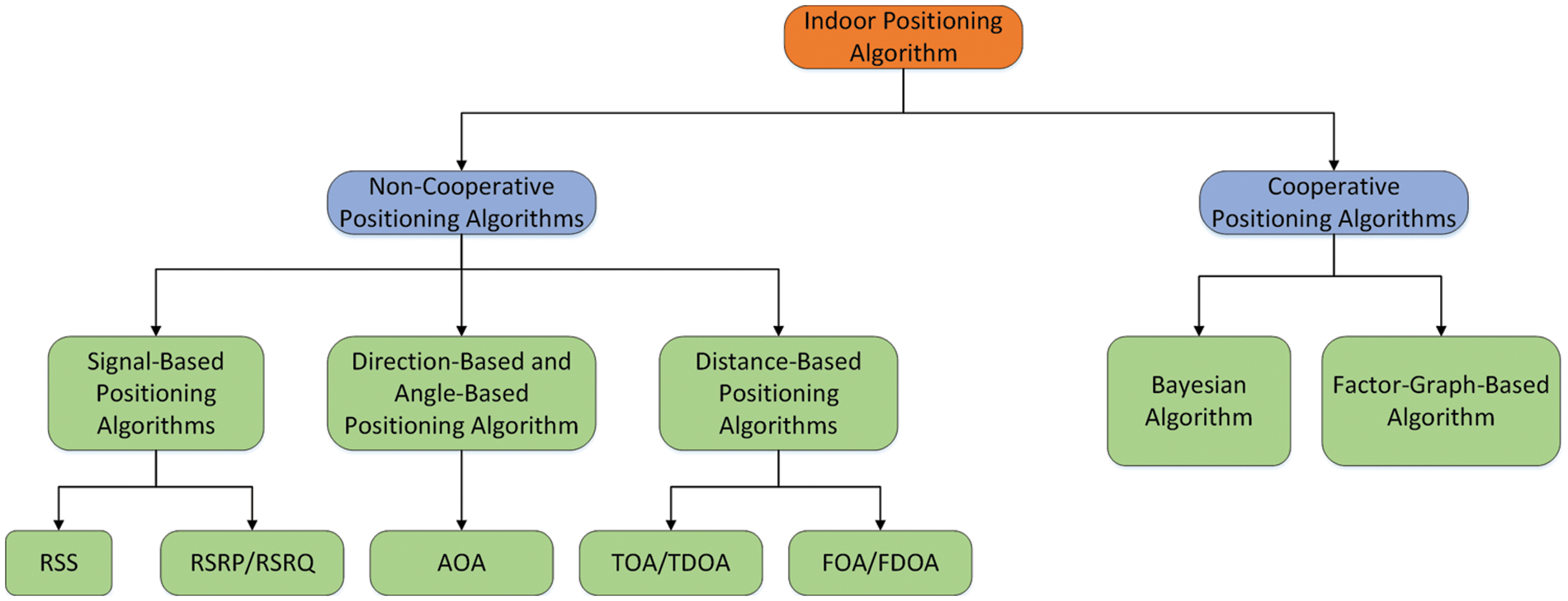
Figure 9: Indoor positioning algorithms for home-based care
3.2.1 Non-Cooperative Positioning Algorithms
There are three types of non-cooperative positioning algorithms [72], which are distance-based positioning algorithm, direction-based and angle-based positioning algorithm and signal-based positioning algorithm [73]. The following is a detailed description respectively.
1. Signal-Based Positioning Algorithms:
1) RSS: The measurement of this method is the signal strength, which means that a higher signal intensity indicates that the distance between the transmitter and the receiver is shorter. A received signal strength indicator (RSSI) is an indicator obtained by signal processing of RSS, which its value is positive. And the distance between the transmitter (TX) and the transmission machine (RX) is determined by the RSSI and signal path loss. The most common formula for calculating the relationship between the power and distance of the calculation signal is to lose the path of the number method [74]. In the trilateration positioning measuring method, the RSSI can be used to estimate the distance between the target node and the fixed anchor node [75]. The approximation method is used to create a geographical fence by the RSSI value to detect the object when the object enters the nearby [76]. In the field analysis method, the RSSI measurement is used to obtain the features of each point on the map. Still, the constructed reference fingerprinting map without the need for training solves the difficulty of collecting environmental measurement values in large buildings [77].
2) RSRP and RSRQ: Reference signal-received power (RSPR) is an indicator for measuring the long-term-evolution (LTE) network coverage effect. Theoretically, the RSPR obtained by the terminal measurement is equal to the transmission power of the cell-specific reference signals (CRS). Reference signal-received quality (RSRQ) is a comprehensive indicator of reference signal load and quality. The unit is dB, the calculation formula is shown in (4).
Among them, N represents the reference signal corresponding to the bandwidth of the frequency point. Therefore, the algorithm measures the LTE reference signal power and quality distributed on the signal block transport size (BTS) tower. The signal-noise ratio is the ratio of carrier power to interference power, which is a better standard than power. The authors of [78] presented a method for statistical processing of LTE network coverage quality parameters. It is preferred to have in higher RSRQ connection, which means that the signal quality is better.
2. Direction-Based and Angle-Based Positioning Algorithm:
1) AOA: The key of positioning algorithm based on the direction and angle is to determine the angle between the transmitter and the receiver. The positioning method of AOA generally uses an antenna array or multiple receivers to obtain the sending angle of the adjacent node signal, and then obtain the orientation line of both parties.
But it requires complex hardware and accurate calibration. And it is impossible to ensure the positioning accuracy of the NLOS, so this method is not suitable for the indoor environment with a complicated situation. The emergence of Bluetooth 5.1 technology can improve the performance of direction-based and angle-based positioning algorithm [79].
3. Distance-Based Positioning Algorithms:
1) TOA and TDOA: The key about this algorithm is to measure the time of signal sending and receiving and thus obtain the distance between them. The distance between the target node and the fixed anchor node is measured by multiplying by time and signal transmission speed (
Among them, V is the wave speed,
The TOA algorithm [80] is implemented by multiple communication between the target node and the fixed anchor node. Calculate the distance between the object between the transmission time between the transmitter and the receiver. Then, use the measurement distance to determine the position of the object. In the TOA based position estimation, firstly, take three base stations as the reference point (
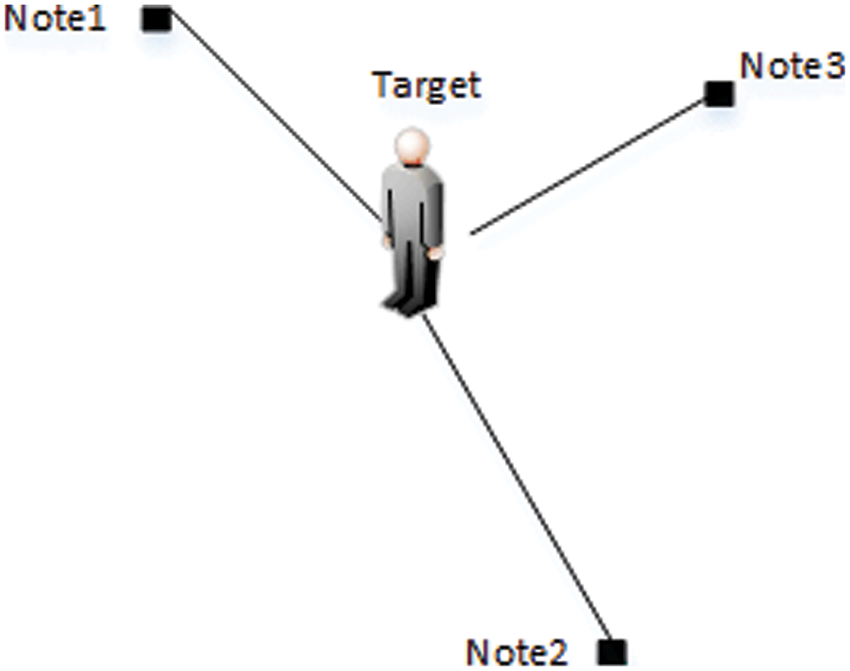
Figure 10: TOA positioning algorithm for home-based care
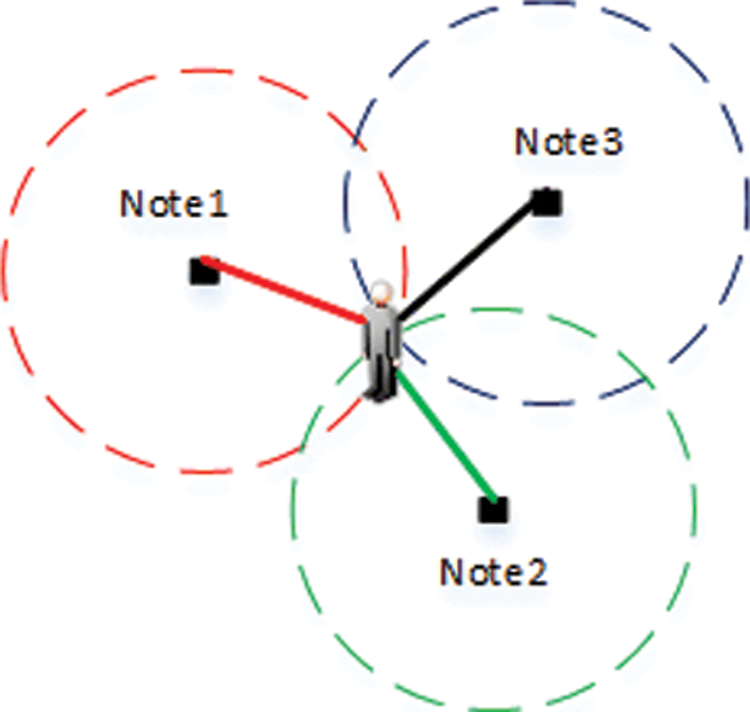
Figure 11: Intersection point for TOA positioning algorithm
Time difference of arrival (TDOA) algorithm [83] unlike TOA, the algorithm does not need to synchronize the reference point and the measurement target clock, but clock synchronization is still required between the reference points. Kim et al. [84] used the TDOA, allowing more complicated time synchronization. In these systems, as shown in Fig. 12, the transmitter transmits sound wave pulse (ultrasonic) and radio pulses, and the receiver compares the time of the two pulses. To determine the speed of each signal, the distance between the signal is obtained from the distance between the sender and the receiver. For each measurement in TDOA, the transmitter must be located on the dual curve, and the difference between the two measurement units is constant.

Figure 12: TDOA algorithm
The estimation error provided by this type of positioning algorithm is the least, but the positioning range of this algorithm is relatively small, and it can only cover 3 to 15 m [85]. Zhou et al. [85] used the maximum value of the Fisher information matrix determinant as the optimization objective function, the accuracy of the positioning error is analyzed by geometric dilution of precision (GDOP), which improves the positioning precision and stability. In addition, the cost of hardware is relatively high, and a separate transmitter and receiver require a higher cost, size, and consumption. Therefore, the applicability is not strong in practical applications.
2) FOA and FDOA: Frequency of arrival (FOA) refers to the signal frequency estimated by the sensor from the received radio waves, and then in using these frequency parameters to obtain information about the location of the wireless signal. The frequency difference of arrival (FDOA) makes use of the frequency difference between the transmitted and received signals. Ding so combine FOA and weighted multidimensional standard algorithms to form a closed positioning solution to reduce the difficulty of calculation [86]. Wei et al. [87] proposed the weighted multi-dimensional standard positioning algorithm of the United FDOA information for the first time, Hamdollahzadeh et al. [88] promoted this method to the scene where the sensor position error exists, and the positioning accuracy of these two methods can approach the Cramer-Rao bounds (CRBs).
3.2.2 Cooperative Positioning Algorithms
There are many types of collaborative localization algorithms, such as the bayesian algorithm, factor- graph-based localization algorithm, and SPAWN collaborative localization algorithm.
1. Bayesian Algorithm:
In the Bayesian algorithm [89], the states of the mobile nodes and the redundant parameters associated with the measurements are modeled as random parameters. The density function of measurement value z and dynamic value
Among
2. Factor-Graph-Based Algorithm:
The factor-graph algorithm is a commonly used probability-based localization algorithm. The algorithm can effectively use the surrounding reference nodes to assist the end nodes to achieve higher accuracy positioning. Chauchat et al. [90] used the algorithm to solve the problem of error accumulation formed during the iteration and the nonlinear optimization problems at hand in navigation.
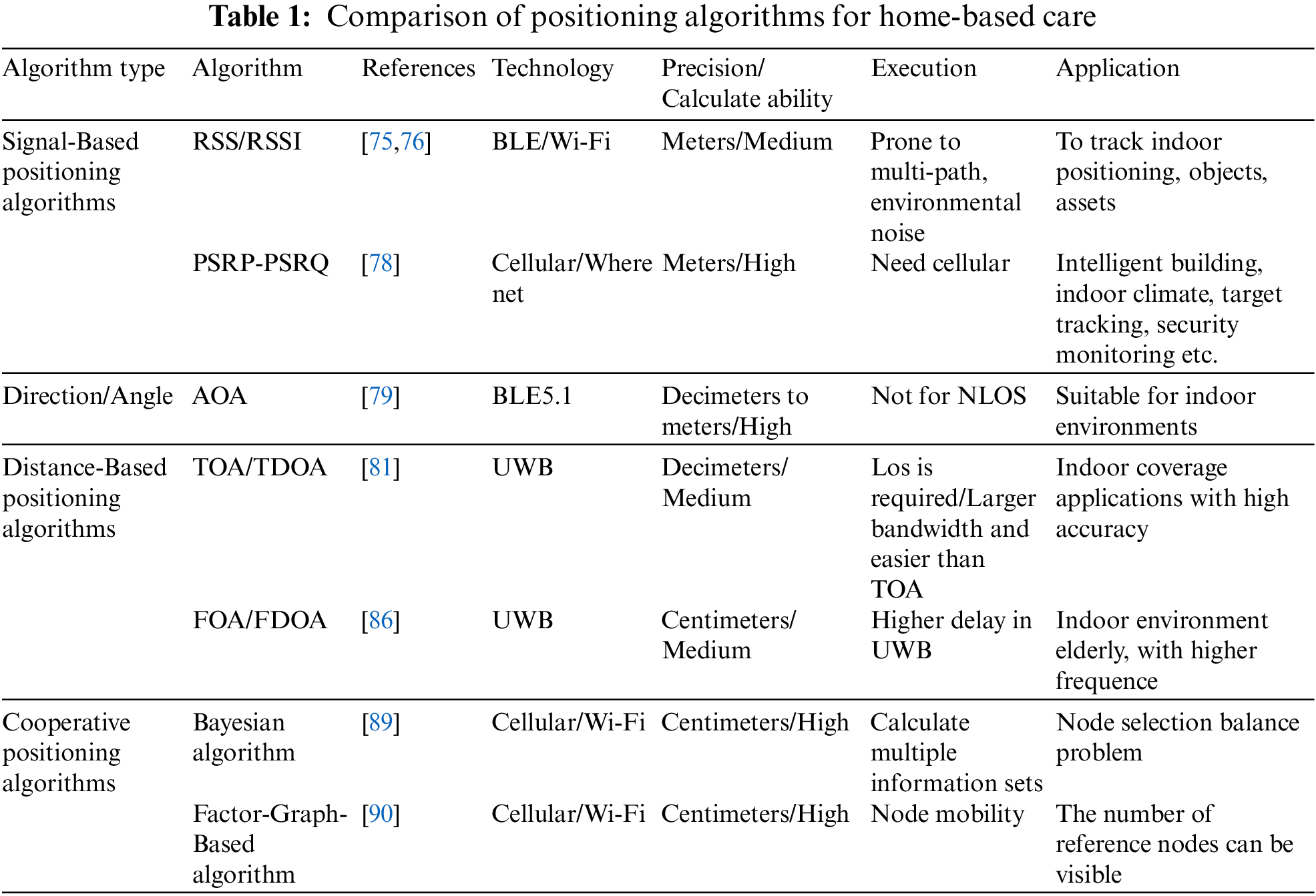
Choosing the right algorithm depends on various factors, such as accuracy, cost, and implementation environment. For different types of positioning algorithms, we compare them from the following aspects, such as Precision, Calculation, Performance, and Application. The comparison results are shown in Table 1.
3.3 Indoor Positioning Technologies for the Home-Based Care
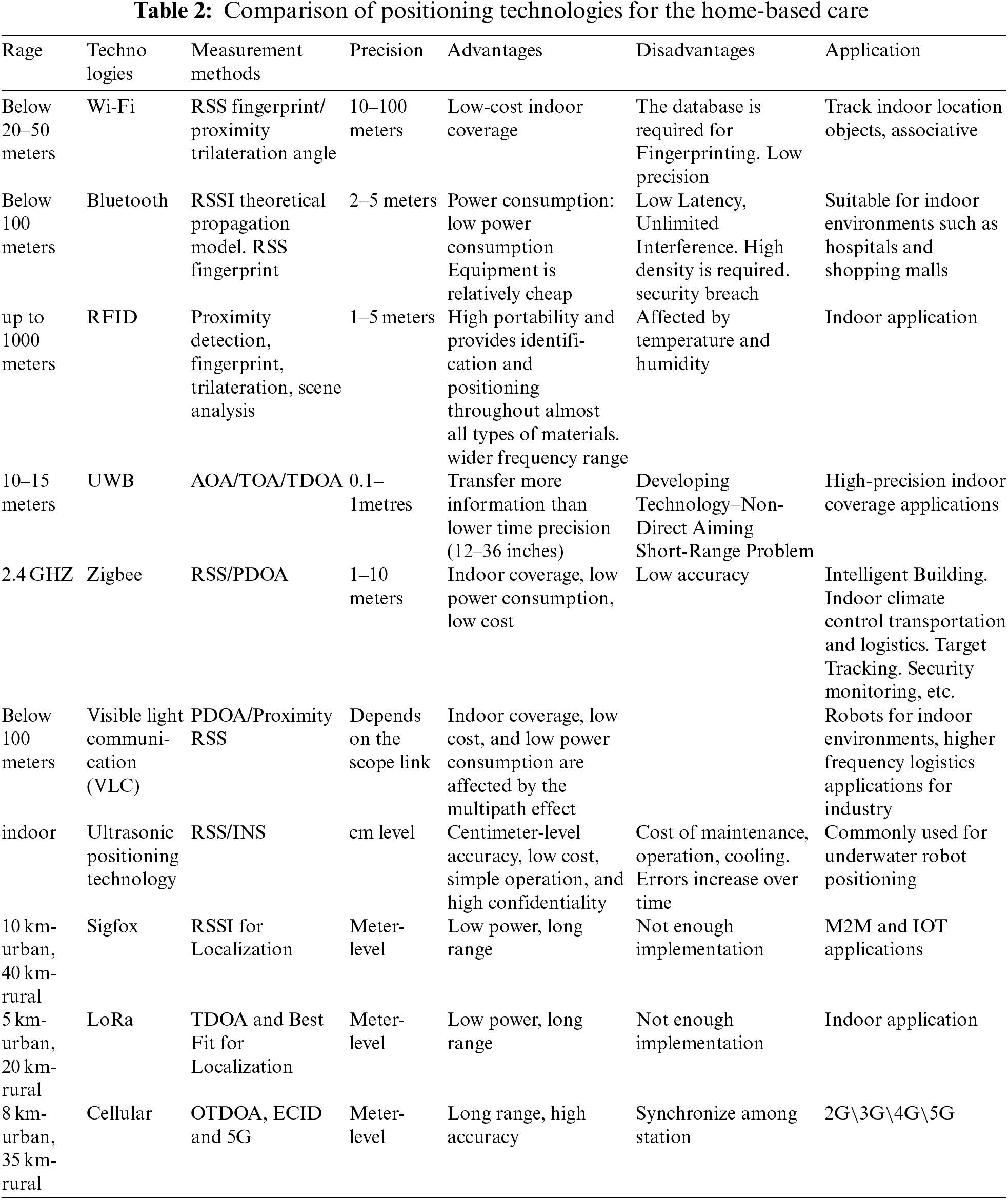
Indoor positioning technology requires communication technology to transfer data between sender and receiver. These positioning enabling technologies are classified according to different standards and can be divided into short-distance transmission technology and long-distance transmission technology [91] according to the length of transmission distance. We compare the scope and computing power of wireless transmission technology, and the results are shown in Fig. 13.
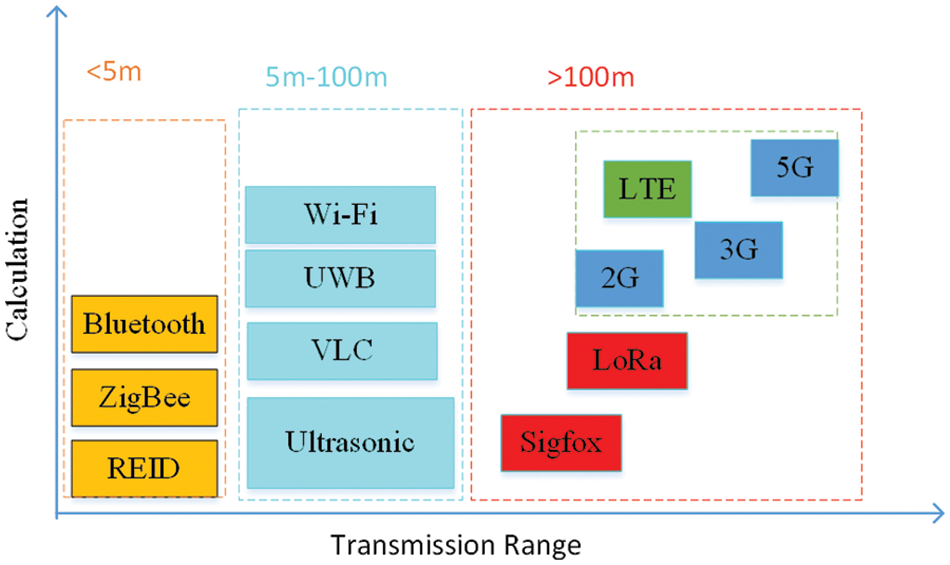
Figure 13: Comparison of indoor positioning technologies for the home-based care
According to the different application scenarios and their respective characteristics, the popular technologies for indoor positioning are discussed and compared. These types of wireless technologies are influenced and limited by signal characteristics, such as, Dispersion, reflection, diffraction, and propagation are the basic factors that affect the signal [92,93]. The following Table 2 specifically describes some indoor positioning technology from the aspects of advantages, disadvantages, applications, and other aspects.
1. Wi-Fi
The main purpose of Wi-Fi is to access the Internet through fixed access points or hotspots. Its equipment follows the IEEE802.11 protocol. Since its development in 1999, its transmission rate has been getting higher and higher, from the earliest 2 Mbps to the current Gbps, and the transmission speed has increased four times in densely populated areas with lower energy consumption. In a Wi-Fi-based system, simple packets of data can be sent to multiple Wi-Fi access points in the facility, which report the read time and strength to the backend, which uses algorithms to calculate the location. The positioning accuracy of Wi-Fi indoor positioning technology is 5–10 meters.
Although Campeón et al. [94] can achieve an accuracy of less than 1 meter, its accuracy is about 2 meters in most commercial applications, depending on the environment and the motion of objects [95,96]. The accuracy, availability, coverage, and high data rate of Wi-Fi positioning technology for human positioning are more suitable for positioning technology in home-based care [97]. Wi-Fi is a suitable choice for human positioning systems in IoT. Furthermore, due to the high data transfer rate, it can be a suitable option for IoT scenarios that need to transmit sensing data. Wi-Fi technology is commonly used for data transmission in signal-based positioning algorithms [98].
2. Bluetooth technology
Bluetooth is a short-range radio wave technology with extremely low power consumption and universal use. It is commonly used in intelligent navigation applications in shopping malls, hospitals, office buildings, and other places. However, for complex space environments, the stability of the Bluetooth positioning system is slightly poor, and it is greatly interfered with by noise signals. Its latest version allows transfer rates up to 24 Mbit/s and is license-free between 2.4 and 2.485 GHz. Bluetooth uses the generic name of the IEEE802.15.1 specification, which defines a global standard for wireless transmission of information (voice and data) between different devices over a secure and license-free short-range radio frequency link [99,100]. Bluetooth 5.1 version is equipped with a new function that can accurately locate the angle of Bluetooth signal transmission based on both AOA and AOD methods. Sig lauded the feature for providing high-precision, real-time, and energy-efficient positioning services of about 10 cm for IoT applications [101]. Chen et al. [102] used Bluetooth wireless signals to build a novel indoor positioning framework to avoid the high manufacturing costs involved in the UWB technology and combined it with the results from artificial intelligence algorithms to improve accuracy.
3. RFID
RFID positioning technology uses radio frequency to exchange data through non-contact two-way communication through electromagnetic signals to achieve the purpose of mobile device identification and positioning. The RFID system is divided into three types: active, passive, and semi-passive. Passive RFID works at distances of up to 10 meters. Active RFID tags can act as beacons to transmit data up to 100 meters [103]. The accuracy and coverage of RFID positioning depend on factors such as the density of tags and readers, the type and frequency of antennas, and the indoor temperature, humidity, or geometry of the building [104,105]. Because RFID is inconvenient to integrate into mobile devices and has a short-range. Considering the security and privacy protection of users and the lack of international standardization, it is not suitable for tracking and navigation systems [106].
4. UWB
Ultra-Wideband (UWB) technology is a new type of short-range high-speed wireless communication technology that has attracted much attention. Data bandwidths in the gigahertz range can be achieved by transmitting data by sending UWB pulses at or below nanoseconds. Generally, the distance between the target node and the fixed anchor node is calculated using TDOA and TOA algorithms instead of the RSSI algorithm. UWB is mainly affected by the multi-path effect, excessive delay, clock drift, signal interference, and system estimation. In response to these challenges, Poulose et al. [107] proposed a multi-anchor indoor positioning algorithm based on an extended kalman filter (EKF), thereby reducing the complexity of the UWB system.
5. ZigBee
ZigBee is a new type of wireless communication technology, which is suitable for a series of electronic components and devices with a short transmission range and low data transmission rate, its operating frequency of ZigBee is between 868 MHz and 2.4 GH [108]. Mahdi et al. [17] used ZigBee localization technology to use the RSSI algorithm to determine the distance between the elderly and the anchor node using a neural network. The final positioning error reaches 0.019 m, and the estimated position is the same as the actual position.
6. VLC
VLC (Visible light communication) uses optical signals for indoor localization has great potential, and visible light communication provides a reliable solution for indoor localization problems [41]. The positioning accuracy of visible light communication positioning technology reaches decimal [36]. Generally, the visible light of LED light is used for data transmission, and the position of the object is estimated by estimating the position of the flickering light. This positioning technology is not interfered with by other signals, the pulse is short, and it is less affected by the multi-path effect [109]. Guan et al. [110] utilized complementary metal-oxide-semiconductor (CMOS) image sensors combined with machine learning algorithms to greatly improve the real-time and robustness of the positioning system.
7. Ultrasonic Positioning Technology
Acoustic localization technology estimates the location of objects by emitting and capturing sound. It has unidirectional and reflective distance measurement methods. The reflection method uses triangulation to determine the location of objects. It is more durable than signal-based techniques in terms of multi-path effects. It has a simple structure and high precision. Its advantages are centimeter-level accuracy, low cost, simple operation, and high confidentiality, and it is more suitable for indoor positioning [111].
8. Sigfox
Sigfox is a low-power wide area network (LPWAN) operator that uses ultra-narrow-band (UNB) technology to transmit low-bit data rates of about 100bps over long distances. Equipped with software-defined cognitive radios and connected to backend servers via IP-based networking. The UNB function helps Sigfox cover a large amount of equipment with fewer base stations. Sigfox proposes positioning in areas where Wi-Fi and GPS are inaccessible and not accurate enough as a complementary technique [112,113]. Sigfox uses frequency bandwidth efficiently, and uses a narrowband experience to experience extremely low noise levels, enabling extremely low power consumption, high receiver sensitivity, low-cost antenna designs, and a maximum throughput of only 100 bps. Aernouts et al. [113] presented a comparison of one fingerprinting method and three ranging methods using Sigfox communication messages. The results show that compared with other signal localization strengths, the fingerprint identification method has the lowest localization error.
9. LoRa
LoRa is a LPWANed specification proposed by the LoRa Alliance, which is known for its resistance to multi-path, interference, and doppler effects [114]. The particularity of LoRa modulation makes it possible to have lots of virtual channels for communication between the terminal device and the base station. Zourmand et al. [115] showed that LoRa is more stable than BLE and Wi-Fi, and has stronger adaptability to environmental changes, with the average error reaching 1.19 meters and 1.72 meters at service level and non-service level, respectively. It can be used in large-scale indoor positioning scenarios [116].
10. LTE
A cellular network is a mobile communication hardware architecture, which is mainly composed of three parts: mobile station, base station subsystem, and network subsystem. LTE provides a wide range of positioning methods and protocols according to the accuracy requirements of 2G to 5G systems. Some 5G -based protocol algorithms have been implemented, but the infrastructure is incomplete, and the application of this positioning technology is not wide. Li et al. [117] investigated a scheme of pulse shaping and a strategy of assigning pulse patterns to base stations to mitigate the near-far problem generated by signals from base stations and satellites. Thus, the positioning precision is improved.
3.4 Ways of Indoor Positioning for the Home-Based Care
Indoor positioning is divided into two ways, cooperative positioning and non-cooperative positioning, according to whether the spatial cooperation between adjacent mobile nodes and the temporal cooperation from the previous state of the mobile nodes themselves are utilized.
Non-cooperative positioning: non-cooperative positioning is to use communication and positioning between the device and the anchor node with a known location, and no additional equipment is involved in the positioning process. The scenario of non-cooperative positioning for home-based care applications is shown in Fig. 14 below.
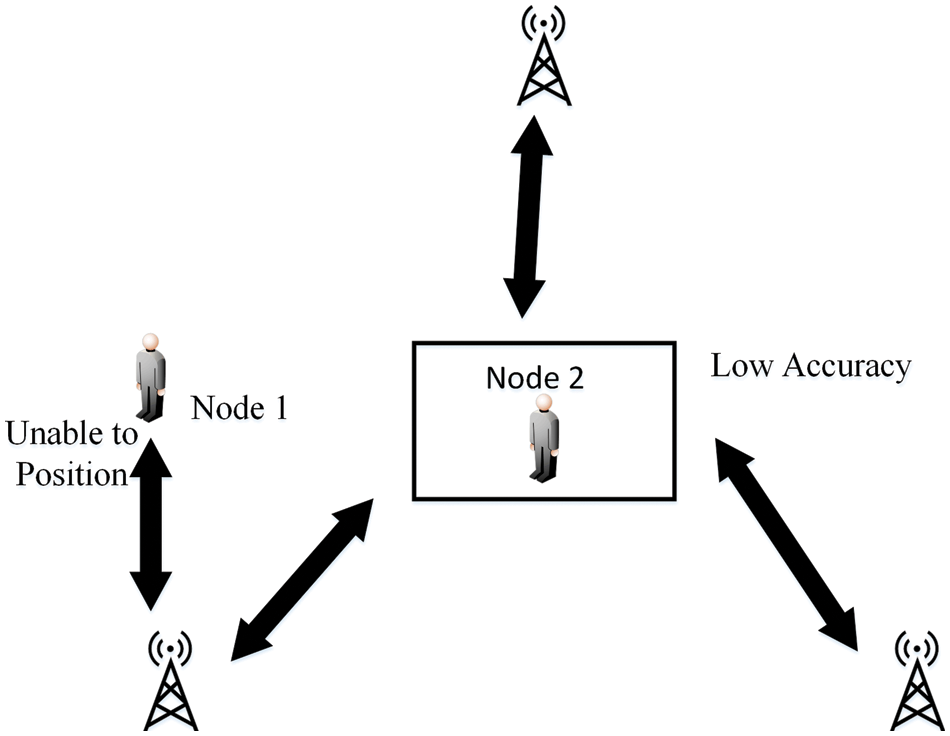
Figure 14: Application scenarios of non-cooperative positioning home-based care
Cooperative positioning: Compared with traditional positioning technology, cooperative positioning uses the measurement information between unknown nodes to obtain relative position information between nodes, expands the positioning range, improves positioning accuracy, and reduces energy consumption. Cooperative positioning can solve the problem of obstacles in the link between the mobile terminal and the base station. Fig. 15 below shows the principle of cooperative positioning.
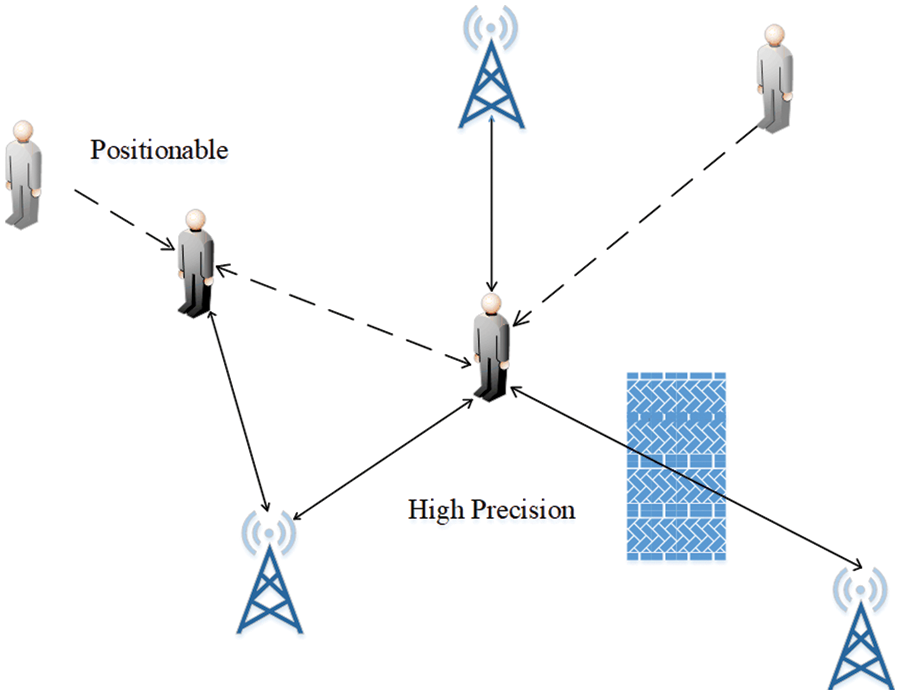
Figure 15: Application of cooperative positioning home-based care
The dark and light-colored figures in the figure represent the position of the mobile node at the previous time and the current time, respectively, and the cooperative and non-cooperative measurements are represented by dashed and solid lines, respectively. Fig. 15 simply shows the scenario of cooperative positioning among 3 base stations and 4 elderly. Different from Fig. 14, the light-colored elderly of Fig. 15 use the relative position information of the dark-colored elderly to locate. This collaborative positioning method can extend the positioning range and save the consumption of anchor nodes.
The principle is the dark-colored old man can determine his position by visiting the three base stations. Due to the communication distance and the building, the light-colored old man cannot directly communicate with the three base stations, but he can accurately access the information of the dark-colored old man.
Implementation process: An important prerequisite is that the target node has Pear-to-Pear wireless communication capabilities, and can obtain connectivity, RSS, TOA, AOA, and other distance angle measurements through wireless signals with neighbors. In the practical application of smart elderly care, this precondition can be easily solved. The communication receiver can be worn on the body of the elderly, which is convenient and compact, easy to carry, and has low power consumption. It has been put into use on many occasions.
There are two types of collaboration, space collaboration, and time collaboration. The relative distance and relative angle are measured, and the additional information in the space obtained by these measurements can enhance the accuracy and robustness of the positioning system. This type of cooperation is called spatial cooperation. The performance can be further improved if the mobile node can also combine its previous state. Using the states of nodes at different times, this type of cooperation can be called temporal cooperation. In the cooperative positioning system, if the location information of one of the elderly people in the system is known, the relative distance and relative angle of the unknown elderly can be obtained through space collaboration. However, if we master the position information of the elderly at the previous time, we can combine our previous state to enhance the accuracy and robustness of the positioning system.
The first application of collaborative positioning to smart elderly care is in nursing homes. Based on the concept of the Internet of Vehicles [118], combined with the Internet of Things, a system network will be formed between the elderly in the nursing home and the monitoring platform, as shown in Fig. 16 below. To better ensure the safety and monitoring of the elderly, it has the following four positioning functions:
(1) Positioning query can be realized: real-time position query and monitoring of the elderly, grouped position query, etc., to help the staff to manage the real-time positioning of the elderly and prevent the occurrence of missing and other situations.
(2) Track playback: The walking track of the elderly is automatically collected to the cloud, which can be returned to visit. In the event of a discharge accident, the track can be viewed to help the tour.
(3) Passive deployment: The entire solution does not require network deployment. Also does not need to be connected to the power supply.
(4) SOS for help: Wear a smart terminal with an SOS button for the elderly, in case of emergency, press the SOS button to send real-time alarm information to the background.
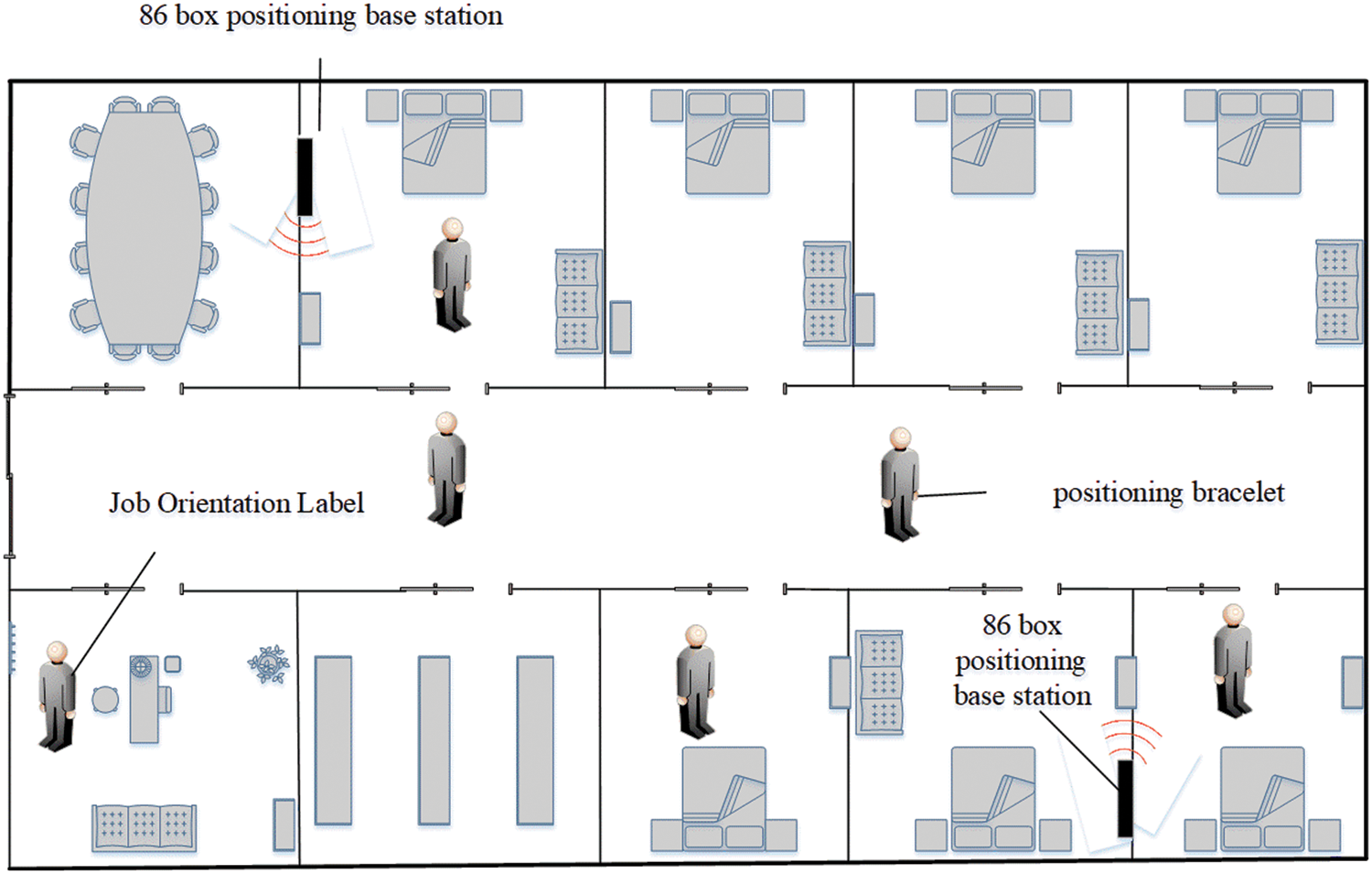
Figure 16: Application of positioning in nursing homes
In addition, cooperative positioning algorithms are divided into centralized [119] and distributed algorithms [120]. Centralized positioning is to aggregate the measurements between nodes to the central node, and obtaining high-precision location information requires a large communication and computing cost. Centralized cooperative localization algorithms are usually based on non-Bayesian estimation. The distributed cooperative positioning algorithm utilizes local measurements to calculate the relative position information locally and synchronize the relative position information across the entire network through existing communications, allowing nodes to share information with their neighbors. Distributed localization algorithms are usually based on Bayesian estimation.
The current cooperative positioning method has high positioning accuracy and less energy consumption. It solves the positioning problem when the number of anchor nodes is small and sparsely distributed in the network and has a good application prospect.
4 Evaluation Criteria and Challenges of Indoor Positioning Technology
In this section, the common evaluation indicators of indoor positioning technology home-based care are introduced, and then the challenges and solutions of indoor positioning technology home-based care are discussed
4.1 Evaluation Criteria of Indoor Positioning for the Home-Based Care
The indoor positioning evaluation index can effectively explain system efficiency and system performance, and comprehensively evaluate the system. Adler et al. [121] systematically analyzed the development of indoor positioning evaluation methods and the different evaluation indicators according to different application scenarios. Considering the particularity of home-based care, such as, the elderly have difficulty in moving, memory decline, etc. Security, privacy, and energy consumption are the main measurement standards to be considered. The following are several evaluation criteria to measure the performance of indoor positioning for home-based care:
1. Accuracy: Accuracy refers to the approximate degree of the estimated position and the actual position, while repetition accuracy refers to the approximate degree of the repeated measurement data over some time. There are many factors affecting accuracy and repetition accuracy, such as noise interference, multi-diameter effect, signal source, and so on. Accuracy and repetition accuracy is regarded as the same concept in the indoor positioning technology of real-life and home-based care. As one of the most basic factors in the evaluation criteria for indoor positioning system, the mean square error (MSE) or root mean square error (RMSE) between the estimated position and the actual position error value is used to measure the quality of the positioning system. The formula of mean square error and root mean square error are (7) and (8), respectively.
2. Energy efficiency: The realization of high-precision and high-efficiency positioning under the premise of low energy consumption affects whether the positioning system can be accepted by users. The reasons affecting energy consumption include signal transmission and reception interval and transmission power. The influence of signal receiving intervals can be solved by using low-power Bluetooth and UWB positioning technology in passive or active mode. The impact of sending efficiency can be managed by outsourcing tasks or using lightweight algorithms.
3. Coverage: The coverage of the indoor positioning system refers to the spatial expansion that can ensure the system’s performance [124]. The size of coverage can be divided into two categories, local coverage and global coverage. Local coverage refers to the coverage of a small and clear area; The local coverage is to cover as much space as possible with the fewest nodes. In terms of indoor positioning, local coverage is an ideal choice. It uses cooperative positioning to increase coverage without adding hardware infrastructure and ensuring performance. In addition, global coverage refers to systems that can operate in a global scope. At present, only the global navigation satellite system and astronomical navigation system belong to global coverage. The home-based elderly care is in a dynamic environment, and the indoor positioning itself has scope problems, which determines that the indoor positioning of home-based elderly care can choose local coverage.
4. Latency: Latency indicates the clock cycle required to execute an instruction, so the less the delay, the better. The real-time positioning system should be able to determine the position of the object in a limited time (milliseconds) and should not exceed a certain error ratio. Due to the influence of environmental noise, it is difficult to achieve high-precision real-time positioning. Delay is the main factor in time-sensitive services related to people’s lives, such as the real-time alarm of the elderly falling in home-based care [17].
5. Interference: The interference of the indoor positioning system refers to the interference factor that affects the positioning. The positioning system is usually composed of one or more devices. These devices are installed in mobile nodes or as deployed infrastructure. Due to the special nature of home care, the fixed infrastructure must be arranged as high as possible to ensure aesthetics and produce less interference with the positioning system. Therefore, these fixed infrastructures must be installed in places that are not easy to be detected. On the other hand, to achieve the safety and comfort of the elderly, the mobile positioning equipment carried by the elderly also needs to be carried out covertly without interference.
6. Universality: Universality refers to the ability for change the number of nodes or changes the size of system coverage. If the positioning system cannot provide position estimation in the extended area of the original design area, the positioning system cannot be extended. Universality is a huge challenge for the positioning system because it needs to monitor lots of nodes at the same time, which may lead to the congestion of information transmission and the loss of accuracy.
7. Commonality/Timeliness: Commonality in the indoor positioning evaluation standard means that users do not need any proprietary hardware to use it. Considering the particularity of many users, this standard is very important in home-based care. For example, compared with UWB and ZigBie positioning technologies, Wi-Fi and Bluetooth positioning technology are two technologies that can be used by almost all users using smartphones. Timeliness means whether real-time access can be achieved when positioning services.
8. Robustness: The robustness of the positioning system refers to the anti-interference ability of the system. This index is very necessary for the consistency of the positioning system. In the application of underground mines, humidity, channel shape and materials will affect the RF signal [125]. In the indoor positioning technology of home-based care, the electromagnetic radiation and wireless signal transmission in the house will also have an impact.
9. Power consumption: Power consumption is a major factor for market of the home-based care to accept indoor location services, so it needs to be estimated in advance. Costs generally include direct costs and hidden costs. The direct cost includes equipment and infrastructure, such as fixed anchor nodes, servers, special software, etc. Hidden costs include time and human resources that should be considered when implementing and installing products, as well as energy consumption, battery life, and monthly maintenance fees. The power consumption of different devices varies greatly. Compared with fingerprint identification and positioning system, Bluetooth and Wi-Fi Positioning systems consume less energy. The more nodes, the greater the power consumption of the positioning system. A few precise positioning systems can achieve the accuracy of the positioning under the premise of low power consumption.
10. Security and reliability: When providing location-based services in home-based care, security and privacy are very important issues. Location information (especially real-time positioning information), daily routine information etc., are considered extremely important privacy information. Because it is collected and stored by the positioning system, it is easy to leak. To solve the problem of capturing, storing, and using many positioning data about the elderly at home, it is necessary to ensure that the collected data are used correctly [126,127]. Considering the particularity of the elderly, the Internet of Things discipline has conducted in-depth research on their security and privacy issues [128,129] and found that they are often more vulnerable to technology-centric malicious activities. Positioning systems based on radio frequency sensing are susceptible to interference, resulting in inaccurate positioning locations [130,131]. In the device-free positioning system for home-based elderly care, the target adopts passive positioning technology, and the target has no equipment that can be damaged or intercepted signals. Therefore, passive location technology is more robust than active location technology. It is applied to field assessment and risk analysis in the context of home-based elderly care, which is the lack of performance of the current positioning system [132]. High-security algorithms enhance energy consumption, but lightweight algorithms can be used to provide privacy for the location system and to ensure the safety for elderly in home-based care. Reliability is also an issue that must be considered in the positioning of home-based care. When the positioning system is in an unexpected situation, such as failure, error warning, etc., backup solutions need to be considered to achieve accurate positioning
4.2 Challenges of Indoor Positioning for Home-Based Care
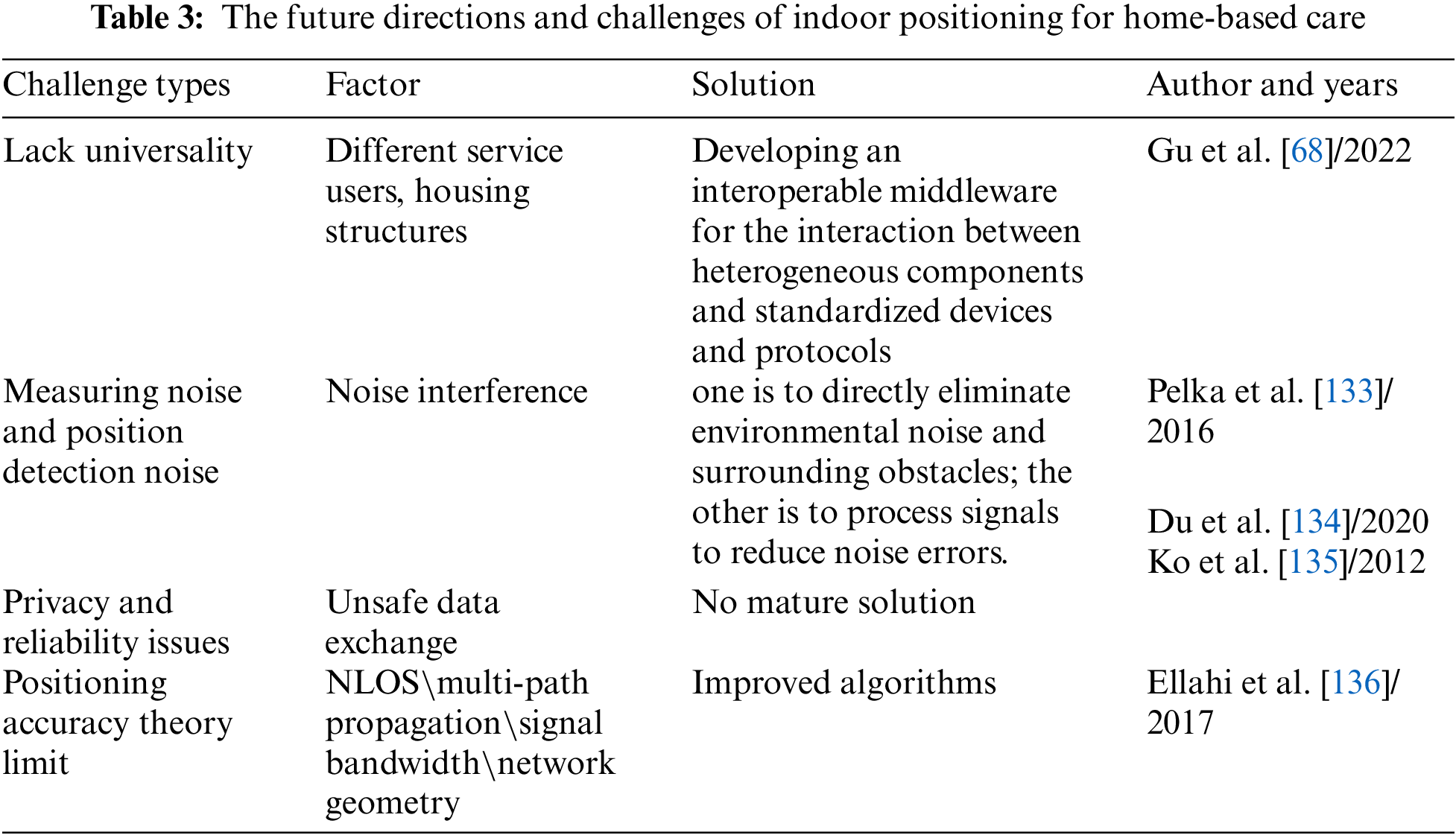
We currently face many challenges in the indoor positioning for home-based care, and there are a variety of factors that contribute to these problems. There are challenges for which solutions are currently available, and challenges for which there are no proven solutions themselves. The specific challenges faced are shown in Table 3.
1. Lack Universality: Due to the impact of different service users, housing structures, and other factors, the home-based care positioning system needs to rely on different positioning technologies, resulting in coverage, maintenance cost and positioning accuracy problems. Some companies try to combine Bluetooth, UWB or Wi-Fi in their positioning products to achieve better interoperability. However, the indoor positioning system lacks an open standard that can cover all applications and meet the needs of users. Therefore, the interaction between different components is one of the main challenges in the field of indoor positioning. Developing an interoperable middleware for the interaction between heterogeneous components and standardized devices and protocols can solve this problem [80].
2. Measuring noise and Position Detection Noise: It is difficult to model the statistical distribution of observations and noise because of the noise interference when measuring information. The movement of the sick elderly is irregular and cannot be detected by the odometer like a car. There are two ways to solve this problem: one is to directly eliminate environmental noise and surrounding obstacles; the other is to process signals to reduce noise errors. Since the indoor positioning of home-based care can not eliminate the external environmental obstacles and noise in the real scene, we can use the two methods to add some algorithms to reduce the signal interference. For example, median filter [133], KF [134,135], and particle filter [137] are used to reduce noise interference by multiple iterations and approximation, to improve the accuracy of indoor positioning.
3. Privacy and Reliability Issues: Currently, there is no mature solution to the security and privacy issues involved in the indoor positioning system. For special users of the elderly, it is easy to disclose the user’s location due to unsafe data exchange in the process of cooperation, allowing illegal criminals to take advantage of it. In addition, the increase in the number of virtual operators and service providers will also add unsafe factors to indoor positioning applications [138].
4. Positioning Accuracy Theory Limit: When positioning the elderly for home-based care, it is inevitable that they will be affected by various factors, such as NLOS conditions, multipath propagation, signal bandwidth and network geometry. In order to improve positioning accuracy, experts have also conducted relevant research. Ellahi et al. [136] optimized the overall localization performance in the antenna array localization system, the effective bandwidth for base-band signal and the magnitude of the modulation frequency are reasonably allocated between the distance and direction information with a fixed effective bandwidth of the modulated signal. Chen et al. [102] proposed a new indoor positioning framework by combining Bluetooth positioning technology with intelligent algorithms to improve accuracy. During laboratory indoor location tracking, the accuracy rate is 96%, which provides effective indoor tracking for the movement of people.
4.3 Existing Solutions of Indoor Positioning for the Home-Base Care
Given the above challenges in the indoor positioning system for home-based elderly care, some methods are adopted to meet the challenges and improve the performance of the indoor positioning system (IPS) for home-based care. The following is an introduction to three aspects: Multi-agent, Strategy Mechanism and Network Optimization.
1. Multi-Agent: Multi-agent [139] refers to a system that completes a complex task through coordination between individuals. For home-based care positioning systems, we aggregate positioning information measured by multiple parties and then use algorithms such as least squares to reduce errors. This can solve some challenges, such as measuring noise and position detection noise and positioning accuracy theory limit.
2. Strategy Mechanism: At present, the positioning algorithm and technology are relatively mature, and the room for improvement is not very large. We can improve the performance of the positioning system by incorporating some strategic mechanisms, such as game-theoretic [122], Economics of Incentive Cooperative Localization Mechanisms [140], etc. This scheme improves the reliability and security of the positioning system, and improves positioning accuracy.
3. Network Optimization: Network performance is also one of the main factors affecting indoor positioning systems. At present, the world has set off a wave of digital transformation of the industry, digital is the foundation, network is the support, intelligent is the goal. On this basis, improve network optimization and maintain a good transmission rate. Strengthen the epidemic prevention system and relieve privacy issues.
4. Optimization techniques: Considering the problems such as error iteration caused by using some algorithms in the localization process, we can add some optimization algorithms, such as the Chimp optimization algorithm (ChOA) [141–144], genetic algorithm (GA), Bayesian positioning algorithm [89]. The ChOA is one of the advanced metaheuristic techniques developed for the resolution of optimization issues. According to prior studies, this technique has properties such as low feature assessment, high speed, and excellent global and local discovery [141]. We can use this algorithm to solve the time complexity of time collaboration positioning. On the other hand, we can combine intelligent algorithms, such as Multi-Layer Perceptron (MLP) and Recurrent Neural Network (RNN), to define a novel indoor positioning framework to improve the positioning accuracy [102].
Indoor positioning solutions are designed to overcome the limitations of GPS. Although indoor solutions have made slow progress in the past decade, their accuracy has increased from the meter level to the centimetre level. Considering unlimited applications and high demand for localized services, many companies have entered this market and adjusted their products using LBS service-based positioning [80]. For example, Bluetooth SIG introduced ble5.1 with specific positioning functions. Nordic semi-launched Bluetooth 5.1 module, which is used to develop IoT products with DF and remote functions. On the other hand, the dwm1000 module produced by Deca-Wave has an accuracy of 10 cm in indoor space and a communication range of up to 200 m. Although UWB is more accurate than the Bluetooth module, it is not an effective solution for large-scale projects in terms of energy and cost. Therefore, indoor positioning technology has broad application scenarios in home-based care, and there are corresponding solutions to solve the existing challenges.
5 6G Indoor Positioning Candidate Technology
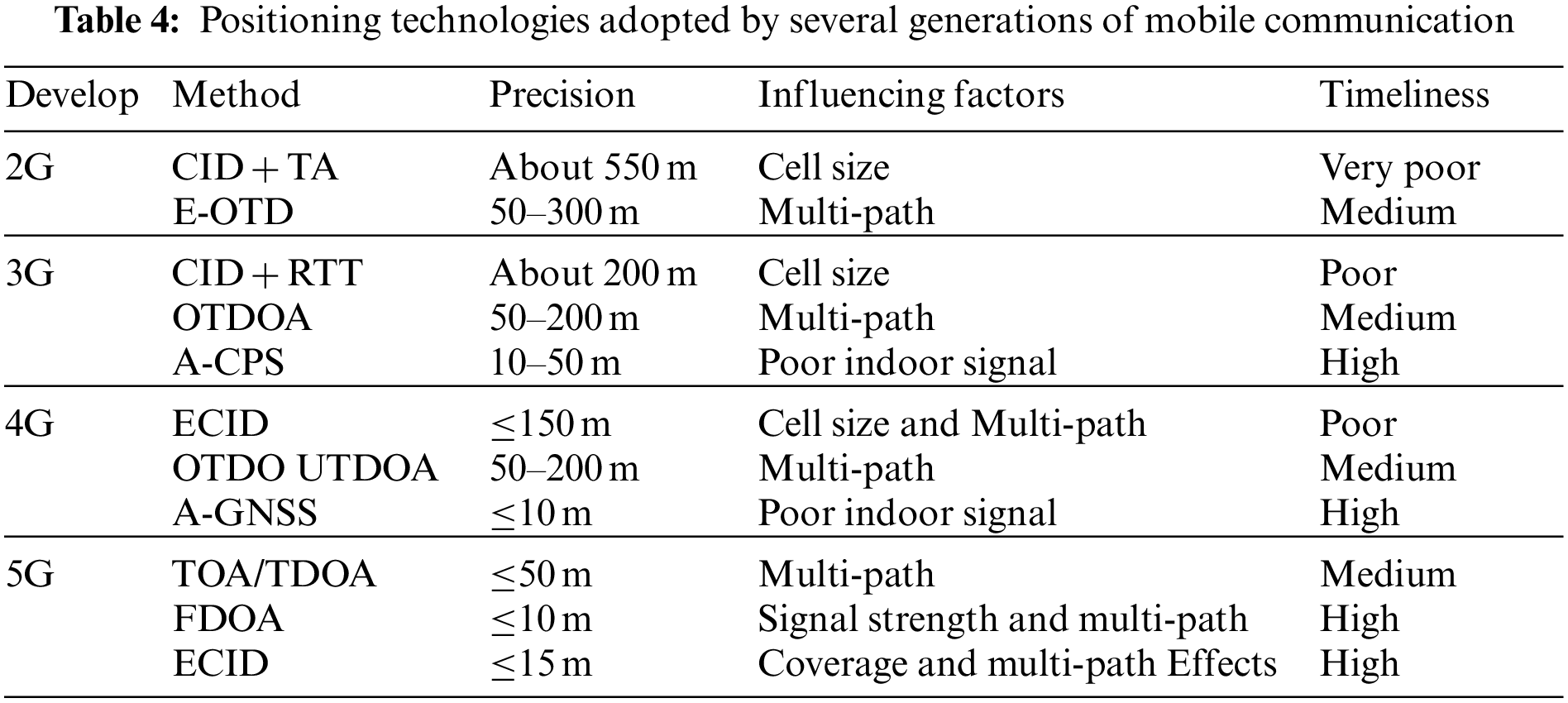
Since 2000, driven by the government, the development of mobile communication technology has shown an upward trend, and so have mobile location services. And the trend of population aging and the development of mobile technology ensure basic consistency. Table 4 shows the accuracy and methods of positioning technology for several generations of mobile communication systems. From 2G to 5 G, the positioning accuracy is higher and the signal delay is lower. Before the 4G era, there was no definition of positioning server and external application interface, so the positioning accuracy was difficult to meet the needs of home-based elderly care positioning. 5G networks have larger bandwidth and subcarrier spacing, solving the problem of difficult integration with applications caused by network structure limitations in the 4G era. The data transmission rate of 6G may reach 50 times that of 5G, which is better than 5G in peak rate, time delay, spectral efficiency, positioning ability, etc. The emergence of 6G networks provides an opportunity for the development of indoor positioning technology for home-based care.
The following focuses on the candidate technologies for indoor positioning in the 6G mobile communication technology. Including terahertz-assisted indoor positioning, large-scale multi-antenna-based indoor positioning, and indoor positioning technology based on reconfigurable smart surfaces.
5.1 Indoor Positioning Based on Massive MIMO (Multiple Input Multiple Output)
Multiple input multiple output (MIMO) [145–147] is an enabling technology to meet the growing demand for faster and more reliable wireless communication in wireless networks with a large number of wireless terminals. User terminals are spatially multiplexed using lots of base station antennas and measured channel state information (CSI). The principle of MIMO is to introduce spatial diversity by increasing the number of antennas at the transmitter and receiver sides, thereby improving wireless link reliability or increasing wireless link capacity by utilizing multi-path propagation. Massive MIMO has the advantages of high spectral efficiency, high directivity, and low complexity, and has the potential to provide precise positioning. This candidate technology can improve the accuracy for the home-based care positioning system.
5.2 Indoor Positioning Technology Based on Reconfigurable Intelligent Surfaces (RIS)
The 6G system can reconstruct the intelligent surface (RIS) [148–150] in the channel transmission, from passively adapting to the environment to actively changing the environment. The RIS system is composed of a large number of low-cost passive units. It has the advantages of low power consumption, low price, and easy installation. Therefore, indoor positioning technology based on Reconfigurable Intelligent hypersurface can be suitable to act as a controllable transmitter or receiver. Yang et al. [149] utilized RIS to enhance the diversity provided by indoor environments and selected RIS state configurations to generate easily differentiable wireless maps for wireless fingerprint localization estimators. Finally, the excellent characteristics of RIS in indoor localization are verified and tested through accurate end-to-end models and computer simulations, and the average localization accuracy is shown to be improved by about 33%. This candidate technology can improve the security and reliability of the home-based care positioning system.
5.3 Terahertz-Assisted Indoor Positioning
Terahertz has abundant spectral resources [151,152], excellent time resolution, and large coding capacity, which is conducive to the performance improvement of time-based positioning technologies such as TOA and TDOA. It can provide a solution with higher precision and lower delay for indoor positioning in a complex multi-path environment. Fan et al. [153] proposed a CSI-based 3D terahertz indoor localization method, based on a structured intra-attention bidirectional recursive (SIABR) deep learning algorithm for solving shadows, multi-path fading and blocking in indoor propagation effect. Simulation results show that the algorithm has a fast convergence speed and good robustness. Under the non-straight anchor environment NLOS, the localization accuracy measured by the average distance error is within 0.27 m, which is 60% higher than the state-of-the-art. The terahertz technology that can be applied to the indoor positioning of smart elderly care can solve the positioning problem of the elderly at home in an NLOS environment, can effectively improve the positioning accuracy, and more comprehensively ensure the personal safety and service needs of the elderly. This candidate technology can enhance the universality and coverage of the home-based care positioning system.
The review provides a safe and feasible home-based care solution and evaluation for the elderly. Firstly, we deeply analyzed the main characteristics of the current home care positioning system and discussed the necessity of precise indoor positioning for the elderly. Secondly, the advantages of device-free positioning are explained in detail. Because of the particularity of the elderly with neurological diseases, for example, the movement burden of the elderly is aggravated by wearing the positioning device, and some elderly cannot wear the positioning device in time because of memory loss, the precise positioning fails to achieve the expected effect. Therefore, we choose the device-free positioning technology and systematically introduce it. Then, the positioning techniques, technologies and methods used in the home-based care positioning system are analyzed and compared. Moreover, the review presents the evaluation metrics for indoor positioning and the challenges faced by researchers working on the indoor positioning of elderly with neurological disorders. Finally, candidate technologies for indoor positioning applications under 6G mobile communication technology are analyzed. And discussed the development opportunities and challenges in the 6G mobile communication network.
In the future, with the development of mobile communication technology, there are still many challenges and opportunities in this field, which require more extensive and professional research by relevant researchers. Neural networks in machine learning can be used to improve the accuracy of positioning systems, and optimization algorithms such as intelligent groups can be combined with positioning technology to improve system efficiency. This recent optimizer provides strong technical support for the performance improvement of the indoor positioning systems, such as the Chimp optimization algorithm, and expert system with the application. Furthermore, the combination of device-free indoor positioning technology and other technologies is used to predict falls and sudden illnesses in the elderly, thereby reducing physical injuries to the elderly with neurological diseases and providing comprehensive protection for the elderly.
Acknowledgement: The authors would like to extend their gratitude to the anonymous reviewers and the editors for their valuable and constructive comments, which have greatly improved the quality of this paper.
Author Contributions: GC performed conceptualization, methodology, design, formal analysis, reviewing, and editing. LC carried out conceptualization, methodology, design, investigation, data collection, data analysis, and writing original draft preparation. RS and QW involved in data curation, critical analysis, writing, reviewing, and editing. SW contributed in formal analysis, reviewing, and editing. All authors contributed to the article and approved the submitted version.
Funding Statement: This work was supported by the National Natural Science Foundation of China under Grant No. 61701284, the Innovative Research Foundation of Qingdao under Grant No. 19-6-2-1-CG, and the Elite Plan Project of Shandong University of Science and Technology under Grant No. skr21-3-B-048, the Sci. & Tech. Development Fund of Shandong Province of China under Grant Nos. ZR202102230289, ZR202102250695, and ZR2019LZH001, the Humanities and Social Science Research Project of the Ministry of Education under Grant No. 18YJAZH017, the Taishan Scholar Program of Shandong Province, the Shandong Chongqing Science and Technology Cooperation Project under Grant No. cstc2020jscx-lyjsAX0008, the Sci. & Tech. Development Fund of Qingdao under Grant No. 21-1-5-zlyj-1-zc, SDUST Research Fund under Grant No. 2015TDJH102, and the Science and Technology Support Plan of Youth Innovation Team of Shandong higher School under Grant No. 2019KJN024.
Conflicts of Interest: The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
1. Shushpanov, D., Zheliuk, T., Zhukovska, A., Diakovich, L., Matsyk, V. et al. (2021). Management of the health care system in the conditions of population aging: Information, analytical and methodical dimension. The 11th International Conference on Advanced Computer Information Technologies (ACIT), pp. 259–264. Shanghai, China. DOI 10.1109/ACIT52158.2021.9548634. [Google Scholar] [CrossRef]
2. Hong, X., Lee, K. (2020). A study on the impact of population aging on the real estate market. International Conference on Urban Engineering and Management Science (ICUEMS), pp. 33–35. Zhuhai, China. DOI 10.1109/ICUEMS50872.2020.00016. [Google Scholar] [CrossRef]
3. Chen, H., Zhao, Y., Zhao, T., Chen, J., Zhao, S. et al. (2021). Emotion recognition of the elderly living alone based on deep learning. IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Penghu, Taiwan. DOI 10.1109/ICCE-TW52618.2021.9603010. [Google Scholar] [CrossRef]
4. Sansrimahachai, W., Toahchoodee, M. (2016). Mobile-phone based immobility tracking system for elderly care. IEEE Region 10 Conference (TENCON), pp. 3550–3553. Singapore. DOI 10.1109/TENCON.2016.7848718. [Google Scholar] [CrossRef]
5. Kamiya, Y., Karoline, S. (2020). Highlights living arrangements of older persons. New York, USA: World Population Ageing. https://www.un.org/development/desa/pd/. [Google Scholar]
6. Jukic, S., Saracevic, M., Subasi, A., Kevric, J. (2020). Comparison of ensemble machine learning methods for automated classification of focal and non-focal epileptic EEG signals. Mathematics, 8(9), 1481. DOI 10.3390/math8091481. [Google Scholar] [CrossRef]
7. Benjamin, J., Muntner, P., Alonso, A., Bittencourt, M. S., Callaway, C. W. et al. (2019). Heart disease and stroke statistics. A report from the American heart association. Circulation, 139, e56–e528. DOI 10.1161/CIR.0000000000000659. [Google Scholar] [CrossRef]
8. Gold, P. W., Machado-Vieira, R., Pavlatou, M. G. (2015). Clinical and biochemical manifestations of depression: Relation to the neurobiology of stress. Neural Plast, 26, 1–11. DOI 10.1155/2015/581976. [Google Scholar] [CrossRef]
9. Wang, S., Zhang, Y., Liu, G., Phillips, P., Yuan, T. F. (2016). Detection of Alzheimer’s disease by three-dimensional displacement field estimation in structural magnetic resonance imaging. Journal of Alzheimer's Disease, 50, 233–248. DOI 10.3233/JAD-150848. [Google Scholar] [CrossRef]
10. Wang, S. H., Du, S., Zhang, Y., Phillips, P., Wu, L. N. et al. (2017). Alzheimer’s disease detection by Pseudo Zernike moment and linear regression classification. CNS & Neurological Disorders-Drug Targets, 34, 11–15. DOI 10.2174/1871527315666161111123024. [Google Scholar] [CrossRef]
11. Nasr, M., Islam, M. M., Shehata, S., Karray, F., Quintana, Y. (2021). Smart healthcare in the Age of AI: Recent advances, challenges, and future prospects. IEEE Access, 9, 145248–145270. DOI 10.1109/ACCESS.2021.3118960. [Google Scholar] [CrossRef]
12. Thangaraj, R., Rajendar, S., Kandasamy, V. (2020). Internet of things in healthcare: An extensive review on recent advances, challenges, and opportunities. In: Pankajavalli, P., Karthick, G. (Eds.Incorporating the Internet of Things in healthcare applications and wearable devices, pp. 23–39. IGI Global, Hershey. DOI 10.4018/978-1-7998-1090-2.ch002. [Google Scholar] [CrossRef]
13. Lee, K. S., Chae, S., Park, H. S. (2019). Optimal time-window derivation for human-activity recognition based on convolutional neural networks of repeated rehabilitation motions. 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), pp. 583–586. Toronto, ON, Canada. DOI 10.1109/ICORR.2019.8779475. [Google Scholar] [CrossRef]
14. Islam, M. M., Nooruddin, S., Karray, F., Muhammad, G. (2022). Human activity recognition using tools of convolutional neural networks: A state of the art review, data sets, challenges and future prospects (Ph.D. Thesis). Cornell University, USA. DOI 10.48550/arXiv.2202.032744. [Google Scholar] [CrossRef]
15. Pascacio, P., Casteleyn, S., Torres-Sospedra, J., Lohan, E. S., Nurmi, J. (2021). Collaborative indoor positioning systems: A systematic review. Sensors, 21(3), 1002. DOI 10.3390/s21031002. [Google Scholar] [CrossRef]
16. Yang, G., Urke, A. R., Øvsthus, K. (2018). Mobility support of IoT solution in home care wireless sensor network. Ubiquitous positioning. Indoor Navigation and Location-Based Services (UPINLBS), pp. 475–480. Wuhan, China. DOI 10.1109/UPINLBS.2018.8559724. [Google Scholar] [CrossRef]
17. Mahdi, S. Q., Gharghan, S. K., Hasan, M. A. (2021). FPGA-Based neural network for accurate distance estimation of elderly falls using WSN in an indoor environment. Measurement, 167, 0263–2241. DOI 10.1016/j.measurement.2020.108276. [Google Scholar] [CrossRef]
18. Islam, M. M., Tayan, O., Islam, M. R., Islam, M. S., Nooruddin, S. et al. (2020). Deep learning based systems developed for fall detection: A review IEEE Access, 8, 166117–166137. DOI 10.1109/ACCESS.2020.3021943. [Google Scholar] [CrossRef]
19. Sheikh, N., Islam, M. M., Falguni, A. S. (2019). An IoT based device-type invariant fall detection system. Internet of Things, 9, 100130. DOI 10.1016/j.iot.2019.100130. [Google Scholar] [CrossRef]
20. Islam, M., Nooruddin, S., Karray, F., Muhammad, G. (2022). Internet of Things device capabilities, architectures, protocols, and smart applications in healthcare domain: A review (Ph.D. Thesis). Cornell University, USA. [Google Scholar]
21. Milon Islam, M., Rahaman, A., Rashedul Islam, M. (2020). Development of smart healthcare monitoring system in IoT environment. SN Computer Science, 1, 185. DOI 10.1007/s42979-020-00195-y. [Google Scholar] [CrossRef]
22. Rahaman, A., Islam, M. M., Islam, M. R., Sadi, M. S., Nooruddin, S. (2019). Developing iot based smart health monitoring systems: A review. Revue D Intelligence Artificielle, 33(6), 435–440. DOI 10.18280/ria.330605. [Google Scholar] [CrossRef]
23. Zhao, M., Wang, J., Zhang, S., Zhang, C. (2018). Method for improving positioning accuracy by using double low-precision GPS. 2018 International Symposium in Sensing and Instrumentation in IoT Era (ISSI), pp. 1–6. Shanghai, China. DOI 10.1109/ISSI.2018.8538110. [Google Scholar] [CrossRef]
24. Foy, W. H. (1976). Position-location solutions by Taylor-series estimation. IEEE Transactions on Aerospace and Electronic Systems, AES-12, 187–194. DOI 10.1109/TAES.1976.308294. [Google Scholar] [CrossRef]
25. Koo, J., Cha, H. (2012). Unsupervised locating of WiFi access points using smartphones. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 42, 1341–1353. DOI 10.1109/TSMCC.2012.2186800. [Google Scholar] [CrossRef]
26. Hassan, R., Pepic, S., Saracevic, M., Ahmad, K., Tasic, M. (2021). A novel approach to data encryption based on matrix computations. Computers, Materials & Continua, 66(2), 1139–1153. DOI 10.32604/cmc.2020.013104. [Google Scholar] [CrossRef]
27. Adamovic, S., Miskovic, V., Macek, N., Milosavljevic, M., Sarac, M. et al. (2020). An efficient novel approach for iris recognition based on stylometric features and machine learning techniques. Future Generation Computer Systems, 107, 144–157. DOI 10.1016/j.future.2020.01.056. [Google Scholar] [CrossRef]
28. Rajasekar, V., Predić, B., Saracevic, M., Elhoseny, M., Karabasevic, D. et al. (2022). Enhanced multimodal biometric recognition approach for smart cities based on an optimized fuzzy genetic algorithm. Scientific Reports, 12(1), 622. DOI 10.1038/s41598-021-04652-3. [Google Scholar] [CrossRef]
29. Siriwardhana, Y., Porambage, P., Liyanage, M., Ylianttila, M. (2021). AI and 6G security: Opportunities and challenges. Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), pp. 616–621. Levi, Finland. DOI 10.1109/EuCNC/6GSummit51104.2021.9482503. [Google Scholar] [CrossRef]
30. Nekovee, M. (2022). Transformation from 5G for verticals towards a 6G-enabled internet of verticals. The 14th International Conference on Communication Systems & NETworks (COMSNETS), pp. 1–6. Chongqing, China. DOI 10.1109/COMSNETS53615.2022.9668541. [Google Scholar] [CrossRef]
31. Vedadi, F., Valaee, S. (2020). Automatic visual fingerprinting for indoor image-based localization applications. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 50, 305–317. DOI 10.1109/TSMC.2017.2695080. [Google Scholar] [CrossRef]
32. Lymberopoulos, D., Liu, J., Yang, X., Choudhury, R. R., Handziski, V. et al. (2015). A realistic evaluation and comparison of indoor location technologies: Experiences and lessons learned. Proceedings of the 14th International Conference on Information Processing in Sensor Networks, pp. 178–189. New York, USA. DOI 10.1145/2737095.2737726. [Google Scholar] [CrossRef]
33. Sertatll, C., Altmkaya, M. A., Raoof, K. (2012). A novel acoustic indoor localization system employing COMA. Digital Signal Processing, 22, 506–517. DOI 10.1016/j.dsp.2011.12.001. [Google Scholar] [CrossRef]
34. Farshad, A., Li, J., Marina, M. K., Garcia, F. J. (2013). A microscopic look at WiFi fingerprinting for indoor mobile phone localization in diverse environments. International Conference on Indoor Positioning and Indoor Navigation, pp. 1–10. Montbeliard-Belfort. DOI 10.1109/IPIN.2013.6817920. [Google Scholar] [CrossRef]
35. Denis, S., Berkvens, R., Weyn, M. (2019). A survey on detection tracking and identification in radio frequency-based device-free localization. Sensors, 19, 5329. DOI 10.3390/s19235329. [Google Scholar] [CrossRef]
36. Keskin, M. F., Sezer, A. D., Gezici, S. (2018). Localization via visible light systems. Proceedings of the IEEE, 106, 1063–1088. DOI 10.1109/JPROC.2018.2823500. [Google Scholar] [CrossRef]
37. Jin, Z., Bu, Y., Liu, J., Wang, X., An, N. (2015). Development of indoor localization system for elderly care based on device-free passive method. Sixth International Conference on Intelligent Systems Design and Engineering Applications (ISDEA), pp. 328–331. Guiyang, China. DOI 10.1109/ISDEA.2015.88. [Google Scholar] [CrossRef]
38. Fernandes, H., Filipe, V., Costa, P., Barroso, J. (2014). Location based services for the blind supported by RFID technology. Procedia Computer Science, 27, 2–8. DOI 10.1016/j.procs.2014.02.002. [Google Scholar] [CrossRef]
39. Firner, B., Jadhav, P., Zhang, Y., Howard, R., Trappe, W. et al. (2009). Towards continuous asset tracking: Low-power communication and fail-safe presence assurance. The 6th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, pp. 1–9. Rome, Italy. DOI 10.1109/SAHCN.2009.5168979. [Google Scholar] [CrossRef]
40. Dong, J., Noreikis, M., Xiao, Y., Ylä-Jääski, A. (2019). ViNav: A vision-based indoor navigation system for smartphones. IEEE Transactions on Mobile Computing, 18, 1461–1475. DOI 10.1109/TMC.2018.2857772. [Google Scholar] [CrossRef]
41. Maheepala, M., Kouzani, A. Z., Joordens, M. A. (2020). Light-based indoor positioning systems: A review. IEEE Sensors, 20, 3971–3995. DOI 10.1109/JSEN.2020.2964380. [Google Scholar] [CrossRef]
42. Zhu, W., Cao, J., Xu, Y., Yang, L., Kong, J. (2014). Fault-tolerant RFID reader localization based on passive RFID tags. IEEE Transactions on Parallel and Distributed Systems, 25, 2065–2076. DOI 10.1109/TPDS.2013.217. [Google Scholar] [CrossRef]
43. Tian, L., Fan, Y. (2018). An improved location algorithm based on mobile anchor node. The 14th International Conference on Computational Intelligence and Security (CIS), pp. 281–285. Hangzhou, China. DOI 10.1109/CIS2018.2018.00069. [Google Scholar] [CrossRef]
44. Guo, Z., Guo, Y., Hong, F., Jin, Z. K., He, Y., Feng, Y. et al. (2010). Perpendicular intersection: Locating wireless sensors with mobile beacon. IEEE Transactions on Vehicular Technology, 59, 3501–3509. DOI 10.1109/TVT.2010.2049391. [Google Scholar] [CrossRef]
45. Jiang, J., Han, G., Xu, H., Shu, L., Guizani, M. (2011). LMAT: Localization with a mobile anchor node based on trilateration in wireless sensor networks. IEEE Global Telecommunications Conference-GLOBECOM 2011, pp. 1–6. Houston, TX, USA. DOI 10.1109/GLOCOM.2011.6133668. [Google Scholar] [CrossRef]
46. Tahat, A., Kaddoum, G., Yousefi, S., Valaee, S., Gagnon, F. (2016). A look at the recent wireless positioning techniques with a focus on algorithms for moving receivers. IEEE Access, 4, 6652–6680. DOI 10.1109/ACCESS.2016.2606486. [Google Scholar] [CrossRef]
47. Zou, J., Guo, X., Li, L., Zhu, S., Feng, X. (2018). Deep regression model for received signal strength based WiFi localization. IEEE 23rd International Conference on Digital Signal Processing (DSP), pp. 1–4. Shanghai, China. DOI 10.1109/ICDSP.2018.8631593. [Google Scholar] [CrossRef]
48. Li, B., Zhao, K., Shen, X. (2020). Dilution of precision in positioning systems using both angle of arrival and time of arrival measurements. IEEE Access, 8, 192506–192516. DOI 10.1109/ACCESS.2020.3033281. [Google Scholar] [CrossRef]
49. Chuang, S., Wu, W., Liu, Y. (2015). High-resolution AoA estimation for hybrid antenna arrays. IEEE Transactions on Antennas and Propagation, 63, 2955–2968. DOI 10.1109/TAP.2015.2426795. [Google Scholar] [CrossRef]
50. Nomura, H., Ichikawa, H., Kawakita, Y. (2018). Reference node selection for range-based localization using hierarchical clustering. IEEE 4th World Forum on Internet of Things (WF-IoT), pp. 140–143. Singapore. DOI 10.1109/WF-IoT.2018.8355228. [Google Scholar] [CrossRef]
51. Tong, K., Wang, X., Khabbazibasmenj, A., Dounavis, A. (2015). Optimum reference node deployment for TOA-based localization. 2015 IEEE International Conference on Communications (ICC), pp. 3252–3256. London, UK. DOI 10.1109/ICC.2015.7248825. [Google Scholar] [CrossRef]
52. Stone, K., Camp, T. (2012). A survey of distance-based wireless sensor network localization techniques. International Journal of Pervasive Computing and Communications, 8, 158–183. DOI 10.1108/17427371211245373. [Google Scholar] [CrossRef]
53. Zafari, F., Papapanagiotou, I., Devetsikiotis, M., Hacker, T. J. (2017). Enhancing the accuracy of iBeacons for indoor proximity-based services. 2017 IEEE International Conference on Communications (ICC), pp. 1–7. Paris, France. DOI 10.1109/ICC.2017.7996508. [Google Scholar] [CrossRef]
54. Patarot, A., Boukallel, M., Lamy-Perbal, S. (2014). A case study on sensors and techniques for pedestrian inertial navigation. 2014 International Symposium on Inertial Sensors and Systems (ISISS), pp. 1–4. Laguna Beach, CA, USA. DOI 10.1109/ISISS.2014.6782527. [Google Scholar] [CrossRef]
55. Li, Y., Li, D., Zhu, G., Cheng, Y. (2020). Inertial navigation technology based on Kalman filtering. 2020 7th International Conference on Information Science and Control Engineering (ICISCE), pp. 739–742. Changsha, China. DOI 10.1109/ICISCE50968.2020.00157. [Google Scholar] [CrossRef]
56. Rezazadeh, J., Sandrasegaran, K., Kong, X. (2018). A Location-based smart shopping system with IoT technology. 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), pp. 748–753. Singapore. DOI 10.1109/WF-IoT.2018.8355175. [Google Scholar] [CrossRef]
57. Ji, M., Kim, J., Jeon, J., Cho, Y., (2015). Analysis of positioning accuracy corresponding to the number of BLE beacons in indoor positioning system. 2015 17th International Conference on Advanced Communication Technology (ICACT), pp. 92–95. PyeongChang, Korea (South). DOI 10.1109/ICACT.2015.7224764. [Google Scholar] [CrossRef]
58. Rath, M., Kulmer, J., Leitinger, E., Witrisal, K. (2020). Single-anchor positioning: Multipath processing with non-coherent directional measurements. IEEE Access, 8, 88115–88132. DOI 10.1109/ACCESS.2020.2993197. [Google Scholar] [CrossRef]
59. Lasla, N., Bachir, A., Younis, M. (2019). Area-based Vs. multilateration localization: A comparative study of estimated position error. 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), pp. 1138–1143. Valencia, Spain. DOI 10.1109/IWCMC.2017.7986445. [Google Scholar] [CrossRef]
60. Mari, S. K., Kiong, L. C., Loong, H. K. (2018). A hybrid trilateration and fingerprinting approach for indoor localization based on wifi. Fourth International Conference on Advances in Computing, Communication & Automation (ICACCA), pp. 1–6. Subang Jaya, Malaysia. DOI 10.1109/ICACCAF.2018.8776729. [Google Scholar] [CrossRef]
61. Kristalina, P., Pratiarso, A., Badriyah, T., Putro, E. D. (2016). A wireless sensor networks localization using geometric triangulation scheme for object tracking in urban search and rescue application. 2016 2nd International Conference on Science in Information Technology (ICSITech), pp. 254–259. Balikpapan, Indonesia. DOI 10.1109/ICSITech.2016.7852643. [Google Scholar] [CrossRef]
62. Peng, R., Sichitiu, M. L. (2006). Angle of arrival localization for wireless sensor network. 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, pp. 374–382. Reston, VA, USA. DOI 10.1109/SAHCN.2006.288442. [Google Scholar] [CrossRef]
63. Ali, R., Liu, R., He, Y., Nayyar, A., Qureshi, B. (2021). Systematic review of dynamic multi-object identification and localization: Techniques and technologies. IEEE Access, 9, 122924–122950. DOI 10.1109/ACCESS.2021.3108775. [Google Scholar] [CrossRef]
64. Lee, T. H., Weng, S. W., Sanford, J. (2020). Indoor radio triangulation using only RSSI data. IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, pp. 1097–1098. Montreal, QC, Canada. DOI 10.1109/IEEECONF35879.2020.9329964. [Google Scholar] [CrossRef]
65. Huang, C., Molisch, A. F., He, R., Wang, R., Tang, P. (2020). Machine learning-enabled LOS/NLOS identification for MIMO systems in dynamic environments. IEEE Transactions on Wireless Communications, 19, 3643–3657. DOI 10.1109/TWC.2020.2967726. [Google Scholar] [CrossRef]
66. Zhong, X., Zhou, Y., Liu, H. Y. (2017). Design and recognition of artificial landmarks for reliable indoor self-localization of mobile robots. International Journal of Advanced Robotic Systems, 14(1). DOI 10.1177/1729881417693489. [Google Scholar] [CrossRef]
67. Atia, M. M., Korenberg, M., Noureidin, A. (2012). A consistent zero-configuration GPS-like indoor positioning system based on signal strength in IEEE 802.11 networks. Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, pp. 1068–1073. Myrtle Beach, SC, USA. DOI 10.1109/PLANS.2012.6236849. [Google Scholar] [CrossRef]
68. Gu, Y., Zhou, C., Wieser, A., Zhou, Z. (2019). Trajectory estimation and crowdsourced radio Map establishment from foot-mounted IMUs, Wi-Fi fingerprints, and GPS positions. IEEE Sensors Jouranl, 19, 1104–1113. DOI 10.1109/JSEN.2018.2877804. [Google Scholar] [CrossRef]
69. Ng, P. C., She, J., Park, S. (2018). High resolution beacon-based proximity detection for dense deployment. IEEE Transactions on Mobile Computing, 17, 1369–1382. DOI 10.1109/TMC.2017.2759734. [Google Scholar] [CrossRef]
70. Gan, X., Yu, B., Heng, Z., Huang, L., Li, Y. (2018). Indoor combination positioning technology of pseudolites and PDR. 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), pp. 1–7. Wuhan, China. DOI 10.1109/UPINLBS.2018.8559941. [Google Scholar] [CrossRef]
71. Sun, J., Yu, X., Zhai, Y., Wang, C. (2020). Research on indoor location technology based on the fusion of WiFi and PDR. 2020 13th International Conference on Intelligent Computation Technology and Automation (ICICTA), pp. 416–419. Xi’an, China. DOI 10.1109/ICICTA51737.2020.00094. [Google Scholar] [CrossRef]
72. Zhu, Z., Xiang, W., Huo, J., Yang, M., Zhang, G. et al. (2022). Non-cooperative target pose estimation based on improved iterative closest point algorithm. Journal of Systems Engineering and Electronics, 33(1), 1–10. DOI 10.23919/JSEE.2022.000001. [Google Scholar] [CrossRef]
73. Du, X., Yang, K., Bisio, I., Lavagetto, F., Sciarrone, A. (2018). An AP-centred smart probabilistic fingerprint system for indoor positioning. IEEE International Conference on Communications (ICC), pp. 1–6. Kansas City, MO, USA. DOI 10.1109/ICC.2018.8422242. [Google Scholar] [CrossRef]
74. Shchekotov, M. (2016). Automatic calibration for log-normal path loss model based on bluetooth low energy beacons. 19th Conference of Open Innovations Association (FRUCT), pp. 212–218. Jyvaskyla, Finland. DOI 10.23919/FRUCT.2016.7892203. [Google Scholar] [CrossRef]
75. Xue, W. X., Qiu, W. N., Hua, X. H., Yu, K. G. (2017). Improved Wi-Fi RSSI mea-surement for indoor localization. IEEE Sensors Journal, 17(7), 2224–2230. DOI 10.1109/JSEN.2017.2660522. [Google Scholar] [CrossRef]
76. Sadowski, S., Spachos, P. (2018). RSSI-Based indoor localization with the Internet of Things. IEEE Access, 6, 30149–30161. DOI 10.1109/ACCESS.2018.2843325. [Google Scholar] [CrossRef]
77. Liu, R., Yuen, C., Do, T. N., Tan, U. X. (2017). Fusing similarity-based sequence and dead reckoning for indoor positioning without training. IEEE Sensors Journal, 17(13), 4197–4207. DOI 10.1109/JSEN.2017.2706303. [Google Scholar] [CrossRef]
78. Mullahmetov, D. D., Fadeev, V. A., Gaysin, A. K., Nadeev, A. F. (2018). Empirical analysis of LTE network coverage quality. Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCROINFO), pp. 1–4. Minsk, Belarus. DOI 10.1109/SYNCHROINFO.2018.8456993. [Google Scholar] [CrossRef]
79. Steendam, H. D. (2017). A 3-D positioning algorithm for AOA-based VLP with an aperture-based receiver. IEEE Jouranl on Selected Areas in Communications, 36(1), 23–33. DOI 10.1109/JSAC.2017.2774478. [Google Scholar] [CrossRef]
80. Farahsari, P. S., Farahzadi, A., Rezazadeh, J., Bagheri, A. (2022). A survey on indoor positioning systems for IoT-based applications. IEEE Internet of Things Journal, 9(10), 7680–7699. DOI 10.1109/JIOT.2022.3149048. [Google Scholar] [CrossRef]
81. Kireev, A., Fokin, G., Al-odhari, A. H. A. (2018). TOA measurement processing analysis for positioning in NLOS conditions. 2018 Systems of Signals Generating and Processing in the Field of on Board Communications, pp. 1–4. Moscow, Russia. DOI 10.1109/SOSG.2018.8350603. [Google Scholar] [CrossRef]
82. Park, J. M., Ahn, C. K., Shi, P., Shmaliy, Y. S., Lim, M. T. (2017). Distributed hybrid particle/FIR filtering for mitigating NLOS effects in TOA-based localization using wireless sensor networks. IEEE Transactions on Industrial Electronics, 64(6), 5182–5191. DOI 10.1109/TIE.2016.2608897. [Google Scholar] [CrossRef]
83. Zhao, Y., Li, Z., Hao, B. J., Wan, P. W., Wang, L. L. (2019). How to select the best sensors for TDOA and TDOA/AOA localization? China Communications, 16, 134–145. DOI 10.12676/j.cc.2019.02.009. [Google Scholar] [CrossRef]
84. Kim, E., Choi, D. K. (2015). A 3D Ad Hoc localization system using aerial sensor nodes. IEEE Sensors Journal, 15(7), 3716–3723. DOI 10.1109/JSEN.2015.2420598. [Google Scholar] [CrossRef]
85. Zhou, R. H., Sun, H. M., Li, H., Luo, W. L. (2020). TDOA and track optimization of UAV swarm based on D-optimality. Journal of Systems Engineering and Electronics, 31(6), 1140–1151. DOI 10.23919/JSEE.2020.000086. [Google Scholar] [CrossRef]
86. Ding, W. (2020). Wireless signal positioning theory and method based on weighted multi-dimensional standards. In: Weighted multidimensional scalar positioning algorithm based on TOA/FOA observation information, pp. 131–134. Beijing: Publishing House of Electronics Industry. [Google Scholar]
87. Wei, H., Peng, R., Wan, Q., Chen, Z., Ye, S. (2020). Multidimensional scaling analysis for passive moving target localization with TDOA and FDOA measurements. IEEE Transactions on Signal Processing, 58(3), 1677–1688. DOI 10.1109/TSP.2009.2037666. [Google Scholar] [CrossRef]
88. Hamdollahzadeh, M., Adelipour, S., Behnia, F. (2016). Optimal sensor configuration for two dimensional source localization based on TDOA/FDOA measurements. 2016 17th International Radar Symposium (IRS), pp. 1–6. Krakow, Poland. DOI 10.1109/IRS.2016.7497276. [Google Scholar] [CrossRef]
89. Guo, Q., Yu, L., Wang, R., Wang, R., Jiang, W. (2021). Sound source localization by iterative Bayesian focusing algorithm in the inhomogeneous medium. International Conference on Information Communication and Signal Processing (ICICSP), pp. 289–294. Shanghai, China. DOI 10.1109/ICICSP54369.2021.9611920. [Google Scholar] [CrossRef]
90. Chauchat, P., Barrau, A., Bonnable, S. (2021). Factor graph-based smoothing without matrix inversion for highly precise localization. IEEE Transactions on Control Systems Technology, 29(3), 1219–1232. DOI 10.1109/TCST.2020.3001387. [Google Scholar] [CrossRef]
91. Batistić, L., Tomic, M. (2018). Overview of indoor positioning system technologies. 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), pp. 473–478. Opatija, Croatia. DOI 10.23919/MIPRO.2018.8400090. [Google Scholar] [CrossRef]
92. Lee, S., Song, J. (2007). Use of coded infrared light as artificial landmarks for mobile robot localization. 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1731–1736. San Diego, CA, USA. DOI 10.1109/IROS.2007.4399600. [Google Scholar] [CrossRef]
93. Zafari, F., Gkelias, A., Leung, K. K. (2017). A survey of indoor localization systems and technologies. IEEE Communications Surveys & Tutorials, 21(3), 2568–2599. DOI 10.1109/COMST.2019.2911558. [Google Scholar] [CrossRef]
94. Campeón, J. P. G., López, S., de Jesús Meleán, S. R., Moldovan, H., Parisi, D. R. et al. (2018). Indoor positioning based on RSSI of WiFi signals: How accurate can it be? 2018 IEEE Biennial Congress of Argentina (ARGENCON), pp. 1–8. San Miguel de Tucuman, Argentina. DOI 10.1109/ARGENCON.2018.8646171. [Google Scholar] [CrossRef]
95. Abbas, M., Elhamshary, M., Rizk, H., Torki, M., Youssef, M. (2019). WiDeep: WiFi-based accurate and robust indoor localization system using deep learning. 2019 IEEE International Conference on Pervasive Computing and Communications, pp. 1–10. Kyoto, Japan. DOI 10.1109/PERCOM.2019.8767421. [Google Scholar] [CrossRef]
96. Bai, J., Sun, Y., Meng, W., Li, C. (2021). Wi-Fi fingerprint-based indoor mobile user localization using deep learning. Wireless Communications and Mobile Computing, 2021(7), 1–12. DOI 10.1155/2021/6660990. [Google Scholar] [CrossRef]
97. Wang, F., Feng, J., Zhao, Y., Zhang, X., Zhang, S. et al. (2019). Joint activity recognition and indoor localization with WiFi fingerprints. IEEE Access, 7, 80058–80068. DOI 10.1109/ACCESS.2019.2923743. [Google Scholar] [CrossRef]
98. Wu, B., Ma, Z., Poslad, S., Li, Y. (2018). WiFi fingerprint based, indoor, location-driven activities of daily living recognition. 2018 5th International Conference on Behavioral, Economic, and Socio-Cultural Computing (BESC), pp. 148–151. Kaohsiung, Taiwan. DOI 10.1109/BESC.2018.8697290. [Google Scholar] [CrossRef]
99. Dardari, D., Closas, P., Djuric, D. M. (2015). Indoor tracking: Theory, methods, and technologies. IEEE Transactions on Vehicular Technology, 64(4), 1263–1278. DOI 10.1109/TVT.2015.2403868. [Google Scholar] [CrossRef]
100. Whitteker, J., Helloco, Y. L., Breton, B. (2007). Evaluation of the field on a uniform array of knife edges using edge reflection. IEEE Transactions on Antennas and Propagation, 55(3), 997–999. DOI 10.1109/TAP.2007.891870. [Google Scholar] [CrossRef]
101. Suryavanshi, N. B., Reddy, K. V., Chandrika, V. R. (2019). Direction finding capability in bluetooth 5.1 standard. In: Lecture notes of the institute for computer sciences, social informatics and telecommunications engineering, vol. 276, pp. 53–65. DOI 10.1007/978-3-030-20615-4_4. [Google Scholar] [CrossRef]
102. Chen, M., Cheng, Y., Chen, R. (2022). A novel indoor positioning framework. Computer Modeling in Engineering & Sciences, 130(3), 1459–1477. DOI 10.32604/cmes.2022.015636. [Google Scholar] [CrossRef]
103. Nilsson, E., Nilsson, B., Bengtsson, L., Svensson, B., Wiberg, P. et al. (2010). A low power-long range active RFID-system consisting of active RFID backscatter transponders. 2010 IEEE International Conference on RFID-Technology and Applications, pp. 26–30. Guangzhou, China. DOI 10.1109/RFID-TA.2010.5529854. [Google Scholar] [CrossRef]
104. Li, C., Mo, L., Zhang, D. (2019). Review on UHF RFID localization methods. IEEE Journal of Radio Frequency Identification, 3(4), 205–215. DOI 10.1109/JRFID.2019.2924346. [Google Scholar] [CrossRef]
105. Ni, D. (2010). Traffic sensing technologies. Traffic Flow Theory, 3–17. DOI 10.1016/B978-0-12-804134-5.00001-5. [Google Scholar] [CrossRef]
106. Ben Halima Abid, D., Allagui, N. Y., Derbel, N. (2017). Navigation and trajectory tracking of mobile robot based on kinematic PI controller. 2017 18th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), pp. 252–256. Monastir, Tunisia. DOI 10.1109/STA.2017.8314966. [Google Scholar] [CrossRef]
107. Poulose, A., Emeršič, Ž, Steven Eyobu, O., Seog Han, D. (2020). An accurate indoor user position estimator for multiple anchor UWB localization. 2020 International Conference on Information and Communication Technology Convergence (ICTC), pp. 478–482. Jeju, Korea (South). DOI 10.1109/ICTC49870.2020.9289338. [Google Scholar] [CrossRef]
108. Gharghan, S. K., Nordin, R., Jawad, A. M., Jawad, H. M., Ismail, M. (2018). Adaptive neural fuzzy inference system for accurate localization of wireless sensor network in outdoor and indoor cycling applications. IEEE Access, 6, 38475–38489. DOI 10.1109/ACCESS.2018.2853996. [Google Scholar] [CrossRef]
109. Al-Hameed, A. A., Younus, S. H., Hussein, A. T., Alresheed, M. T., Elmirghani, J. M. H. (2019). LiDAL: Light detection and localization. IEEE Access, 7, 85645–85687. DOI 10.1109/ACCESS.2019.2925076. [Google Scholar] [CrossRef]
110. Guan, W., Wen, S., Zhang, H., Liu, L. (2018). A novel three-dimensional indoor localization algorithm based on visual visible light communication using single LED. 2018 IEEE International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), pp. 202–208. Shenyang, China. DOI 10.1109/AUTEEE.2018.8720798. [Google Scholar] [CrossRef]
111. Alarifi, A., Al-Salman, A., Alsaleh, M., Alnafessah, A., Al-Hadhrami, S. et al. (2016). Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors, 16(5), 707. DOI 10.3390/s16050707. [Google Scholar] [CrossRef]
112. Febriyandi, F., Arifin, A. S., Nashiruddin, M. I. (2020). Sigfox based network planning analysis for public internet of things services in metropoli-tan area. 2020 IEEE International Conference on Industry 4.0, Artificial Intelligence, and Communications Technology (IAICT), pp. 21–27. Bali, Indonesia. DOI 10.1109/IAICT50021.2020.9172012. [Google Scholar] [CrossRef]
113. Aernouts, M., Bellekens, B., Berkvens, R., Weyn, M. (2018). A comparison of signal strength localization methods with Sigfox. 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), pp. 1–6. Bremen, Germany. DOI 10.1109/WPNC.2018.8555743. [Google Scholar] [CrossRef]
114. Xu, W., Kim, J. Y., Huang, W., Kanhere, S. S., Jha, S. K. et al. (2019). Measurement, characterization, and modeling of LoRa technology in multifloor buildings. IEEE Internet Things Journal, 7(1), 298–310. DOI 10.1109/JIOT.2019.2946900. [Google Scholar] [CrossRef]
115. Zourmand, A., Kun Hing, A. L., Wai Hung, C., AbdulRehman, M. (2019). Internet of Things (IoT) using LoRa technology. 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), pp. 324–330. Selangor, Malaysia. DOI 10.1109/I2CACIS.2019.8825008. [Google Scholar] [CrossRef]
116. Lam, K. H., Cheung, C. C., Lee, W. C. (2019). RSSI-Based LoRa localization systems for large-scale indoor and outdoor environments. IEEE Transactions on Vehicular Technology, 68(12), 11778–11791. DOI 10.1109/TVT.2019.2940272. [Google Scholar] [CrossRef]
117. Li, X. (2019). Cellular base station assisted indoor positioning. IEEE Transactions on Aerospace and Electronic Systems, 55(2), 592–606. DOI 10.1109/TAES.2018.2856319. [Google Scholar] [CrossRef]
118. Qiong, W., Yu, Z., Qiang, F. (2022). Time-dependent performance modeling for platooning communications at intersection. IEEE Internet of Things Journal. DOI 10.1109/JIOT.2022.3161028. [Google Scholar] [CrossRef]
119. Sakr, M., Masiero, A., El-Sheimy, N. (2019). LocSpeck: A collaborative and distributed positioning system for asymmetric nodes based on UWB ad-hoc network and Wi-Fi fingerprinting. Sensors, 20(1), 78. DOI 10.3390/s20010078. [Google Scholar] [CrossRef]
120. Peng, B., Seco-Granados, G., Steinmetz, E., Fröhle, M., Wymeersch, H. (2019). Decentralized scheduling for cooperative localization with deep reinforcement learning. IEEE Transactions on Vehicular Technology, 68(5), 4295–4305. DOI 10.1109/TVT.2019.2913695. [Google Scholar] [CrossRef]
121. Adler, S., Schmitt, S., Wolter, K., Kyas, M. (2015). A survey of experimental evaluation in indoor localization research. 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), pp. 1–10. Banff, AB, Canada. DOI 10.1109/IPIN.2015.7346749. [Google Scholar] [CrossRef]
122. Zhu, Y., Yan, F., Zhao, S., Shen, F., Xing, S. et al. (2020). Incentive mechanism for cooperative localization in wireless networks. IEEE Transactions on Vehicular Technology, 69(12), 15920–15932. DOI 10.1109/TVT.2020.3037743. [Google Scholar] [CrossRef]
123. Li, W. C., Jelfs, B. (2021). Cooperative localization using distance measurements for mobile nodes. Sensors, 21, 1507. DOI 10.3390/s21041507. [Google Scholar] [CrossRef]
124. Mautz, R. (2012). Indoor positioning technologies. ETH Zurich: Zurich, Switzerland. DOI 10.3929/ethz-a-007313554. [Google Scholar] [CrossRef]
125. Hrovat, A., Kandus, G., Javornik, T. (2014). A survey of radio propagation modeling for tunnels. IEEE Communications Surveys & Tutorials, 16(2), 658–669. DOI 10.1109/SURV.2013.091213.00175. [Google Scholar] [CrossRef]
126. Li, H., Sun, L., Zhu, H., Lu, X., Cheng, X. (2014). Achieving privacy preservation in WiFi fingerprint-based localization. IEEE INFOCOM 2014-IEEE Conference on Computer Communications, pp. 2337–2345. Toronto, ON, Canada. DOI 10.1109/INFOCOM.2014.6848178. [Google Scholar] [CrossRef]
127. Holcer, S., Torres-Sospedra, J., Gould, M., Remolar, I. (2020). Privacy in indoor positioning systems: A systematic review. 2020 International Conference on Localization and GNSS (ICL-GNSS), pp. 1–6. Tampere, Finland. DOI 10.1109/ICL-GNSS49876.2020.9115496. [Google Scholar] [CrossRef]
128. Yang, Y., Wu, L., Yin, G., Li, L., Zhao, H. (2017). A survey on security and privacy issues in Internet-of-Things. IEEE Internet Things Journal, 4(5), 1250–1258. DOI 10.1109/JIOT.2017.2694844. [Google Scholar] [CrossRef]
129. Frustaci, M., Pace, P., Aloi, G., Fortino, G. (2018). Evaluating critical security issues of the IoT world: Present and future challenges. IEEE Internet Things Journal, 5(4), 2483–2495. DOI 10.1109/JIOT.2017.2767291. [Google Scholar] [CrossRef]
130. Kim, S., Ha, S., Saad, A., Kim, J. (2015). Indoor positioning system techniques and security. 2015 Forth International Conference on e-Technologies and Networks for Development (ICeND), pp. 1–4. Lodz, Poland. DOI 10.1109/ICeND.2015.7328540. [Google Scholar] [CrossRef]
131. Cho, J., Yu, J., Oh, S., Ryoo, J., Song, J. et al. (2017). Wrong siren! A location spoofing attack on indoor positioning systems: The starbucks case study. IEEE Communications Magazine, 55(3), 132–137. DOI 10.1109/MCOM.2017.1600595CM. [Google Scholar] [CrossRef]
132. Tiku, S., Pasricha, S. (2019). Overcoming security vulnerabilities in deep learning-based indoor localization frameworks on mobile devices. ACM Transactions on Embedded Computing Systems, 18(6), 1–24. DOI 10.1145/3362036. [Google Scholar] [CrossRef]
133. Pelka, M., Hellbrück, H. (2016). Introduction, discussion and evaluation of recursive Bayesian filters for linear and nonlinear filtering problems in indoor localization. 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), pp. 1–8. Alcala de Henares, Spain. DOI 10.1109/IPIN.2016.7743663. [Google Scholar] [CrossRef]
134. Du, C., Peng, B., Zhang, Z., Xue, W., Guan, M. (2020). KF-KNN: Low-cost and high-accurate FM-based indoor localization model via fingerprint technology. IEEE Access, 8, 197523–197531. DOI 10.1109/ACCESS.2020.3031089. [Google Scholar] [CrossRef]
135. Ko, N. Y., Kim, T. G. (2012). Comparison of kalman filter and particle filter used for localization of an underwater vehicle. 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), pp. 350–352. Daejeon, Korea (South). DOI 10.1109/URAI.2012.6463013. [Google Scholar] [CrossRef]
136. Ellahi, Z., ur Rehman, A. (2017). Phased array antenna for the application of device free localization in indoor environments. 2017 Intelligent Systems Conference (IntelliSys), pp. 1074–1077. London, UK. DOI 10.1109/IntelliSys.2017.8324261. [Google Scholar] [CrossRef]
137. Liu, X., Ma, B., Qi, N., Zhang, Z., Ren, D. A. (2008). Sonar data based particle filtering localization method for mobile robot. 2008 7th World Congress on Intelligent Control and Automation, pp. 3920–3924. Chongqing, China. DOI 10.1109/WCICA.2008.4593555. [Google Scholar] [CrossRef]
138. Liyanage, M., Gurtov, A., Ylianttila, M. (2015). Mobile virtual network operators. In: Software defined mobile networks (SDMNBeyond LTE network architecture, pp. 289–314. Hoboken, New Jersey: Wiley. DOI 10.1002/9781118900253.ch16. [Google Scholar] [CrossRef]
139. Fang, T., Huan, L. (2020). A distributed optimization algorithm for multi-agent systems with limited communication. 2020 Chinese Control and Decision Conference (CCDC), pp. 622–625. Hefei, China. DOI 10.1109/CCDC49329.2020.9164218. [Google Scholar] [CrossRef]
140. Zhu, Y., Zhang, Y., Yan, F., Xia, W., Shen, L. et al. (2018). On the economics of incentive cooperative localization mechanisms in wireless networks. 2018 IEEE International Conference on Communications Workshops (ICC Workshops), pp. 1–5. Kansas City, MO, USA. DOI 10.1109/ICCW.2018.8403686. [Google Scholar] [CrossRef]
141. Piri, J., Mohapatra, P., Pradhan, M. R., Acharya, B., Patra, T. K. (2021). A binary multi-objective chimp optimizer with dual archive for feature selection in the healthcare domain. IEEE Access, 10, 1756–1774. DOI 10.1109/ACCESS.2021.3138403. [Google Scholar] [CrossRef]
142. Moharam, R., Ali, A. F., Morsy, E., Ahmed, M. A., Mostafa, M. S. M. (2022). A discrete chimp optimization algorithm for minimizing tardy/lost penalties on a single machine scheduling problem. IEEE Access, 10, 52126–52138. DOI 10.1109/ACCESS.2022.3174484. [Google Scholar] [CrossRef]
143. Manjula, P., Baghavathi Priya, S. (2022). Chimp optimization algorithm based energy aware secure routing protocol for wireless sensor networks. 2022 6th International Conference on Computing Methodologies and Communication (ICCMC), pp. 188–193. Beijing, China. DOI 10.1109/ICCMC53470.2022.9753826. [Google Scholar] [CrossRef]
144. Manjula, P., Baghavathi Priya, S. (2022). Detection of falsified selfish node with optimized trust computation model in chimp-AODV based WSN. 2022 International Conference on Electronic Systems and Intelligent Computing (ICESIC), pp. 52–57. Chennai, India. DOI 10.1109/ICESIC53714.2022.9783507. [Google Scholar] [CrossRef]
145. Campos, R. S. (2017). Evolution of positioning techniques in cellularnet works, from 2G to 4G. Wireless Communications and Mobile Computing, 2017, 2315036. DOI 10.1155/2017/2315036. [Google Scholar] [CrossRef]
146. Cerar, G., Švigelj, A., Mohorčič, M., Fortuna, C., Javornik, T. (2021). Improving CSI-based massive MIMO indoor positioning using convolutional neural network. 2021 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), pp. 276–281. Porto, Portugal. DOI 10.1109/EuCNC/6GSummit51104.2021.9482604. [Google Scholar] [CrossRef]
147. Garcia, N., Wymeersch, H., Larsson, E. G., Haimovich, A. M., Coulon, M. (2017). Direct localization for massive MIMO. IEEE Transactions on Signal Processing, 65(10), 2475–2487. DOI 10.1109/TSP.2017.2666779. [Google Scholar] [CrossRef]
148. Ma, T., Xiao, Y., Lei, X., Xiong, W., Ding, Y. (2021). Indoor localization with reconfigurable intelligent surface. IEEE Communications Letters, 25(1), 161–165. DOI 10.1109/LCOMM.2020.3025320. [Google Scholar] [CrossRef]
149. Yang, Z., Zhang, H., Di, B., Zhang, H., Bian, K. et al. (2021). Wireless indoor simultaneous localization and mapping using reconfigurable intelligent surface. 2021 IEEE Global Communications Conference (GLOBECOM), pp. 1–6. Madrid, Spain. DOI 10.1109/GLOBECOM46510.2021.9685930. [Google Scholar] [CrossRef]
150. Nguyen, C. L., Georgiou, O., Gradoni, G., di Renzo, M. (2021). Wireless fingerprinting localization in smart environments using reconfigurable intelligent surfaces. IEEE Access, 9, 135526–135541. DOI 10.1109/ACCESS.2021.3115596. [Google Scholar] [CrossRef]
151. El-Absi, M., Alhaj Abbas, A., Abuelhaija, A., Zheng, F., Solbach, K. et al. (2018). High-accuracy indoor localization based on chipless RFID systems at THz band. IEEE Access, 6, 54355–54368. DOI 10.1109/ACCESS.2018.2871960. [Google Scholar] [CrossRef]
152. Barneto, C. B., Rastorgueva-Foi, E., Keskin, M. F., Riihonen, T., Turunen, M. C. et al. (2022). Millimeter-wave mobile sensing and environment mapping: Models, algorithms and validation. IEEE Transactions on Vehicular Technology, 71(4), 3900–3916. DOI 10.1109/TVT.2022.3146003. [Google Scholar] [CrossRef]
153. Fan, S., Wu, Y., Han, C., Wang, X. (2021). SIABR: A structured intra-attention bidirectional recurrent deep learning method for ultra-accurate terahertz indoor localization. IEEE Journal on Selected Areas in Communications, 39(7), 2226–2240. DOI 10.1109/JSAC.2021.3078491. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools