
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

Control Structures and Algorithms for Force Feedback Bilateral Teleoperation Systems: A Comprehensive Review
1 Department of Computer Science and Engineering, Major in Bio Artificial Intelligence, Hanyang University, Ansan-si, 15577, Republic of Korea
2 Department of Geography and Anthropology, Louisiana State University, Baton Rouge, LA 70803, USA
3 Department of Computer Engineering, College of Computer and Information Sciences, King Saud University, Riyadh, 11574, Saudi Arabia
4 School of Automation, University of Electronic Science and Technology of China, Chengdu, 610054, China
* Corresponding Authors: Lirong Yin. Email: ; Wenfeng Zheng. Email:
Computer Modeling in Engineering & Sciences 2025, 142(2), 973-1019. https://doi.org/10.32604/cmes.2024.057261
Received 13 October 2024; Accepted 11 November 2024; Issue published 27 January 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Force feedback bilateral teleoperation represents a pivotal advancement in control technology, finding widespread application in hazardous material transportation, perilous environments, space and deep-sea exploration, and healthcare domains. This paper traces the evolutionary trajectory of force feedback bilateral teleoperation from its conceptual inception to its current complexity. It elucidates the fundamental principles underpinning interaction forces and tactile exchanges, with a specific emphasis on the crucial role of tactile devices. In this review, a quantitative analysis of force feedback bilateral teleoperation development trends from 2011 to 2024 has been conducted, utilizing published journal article data as the primary source of information. The review accentuates classical control frameworks and algorithms, while also delving into existing research advancements and prospective breakthrough directions. Moreover, it explores specific practical scenarios ranging from intricate surgeries to hazardous environment exploration, underscoring the technology’s potential to revolutionize industries by augmenting human manipulation of remote systems. This underscores the pivotal role of force feedback bilateral teleoperation as a transformative human-machine interface, capable of shaping flexible control strategies and addressing technological bottlenecks. Future research endeavors in force feedback bilateral teleoperation are expected to prioritize the creation of more immersive experiences, overcoming technical hurdles, fortifying human-machine collaboration, and broadening application domains, particularly within the realms of medical intervention and hazardous environments. With the continuous progression of technology, the integration of human intelligence and robotic capabilities is expected to produce more innovations and breakthroughs in the field of automatic control.Keywords
Bilateral teleoperation involves remote operators controlling robotic systems or devices from a distance while receiving feedback from the remote environment. Force feedback, also referred to as tactile feedback, is a crucial enhancement in bilateral teleoperation, providing remote operators with tactile sensations and physical interactions with the remote environment. Force feedback bilateral remote control, often termed haptic remote control or haptic feedback teleoperation, encompasses the use of technology to provide sensory (tactile) feedback and control signals to remote operators. By offering operators environmental conditions like those at a distant location, force feedback bilateral teleoperation enables them to manipulate objects or systems from afar and perceive the remote environment through haptic feedback at the operational end.
The origins of telecontrol concepts and research can be traced to the late 19th century, exemplified by Nikola Tesla’s remote-controlled boat invention [1]. Hokayem et al.’s survey provides a comprehensive review of bilateral teleoperation technology development from the 1940s to the early 2000s [2]. The master-slave teleoperator constructed by Goertz in the mid-1940s is widely acknowledged as the theoretical foundation of bilateral teleoperation systems [3]. Subsequent research in the following decade primarily focused on investigating the impact of delays in remote operations and developing strategies to mitigate these delays. Sun et al.’s review [4] covers the development of wave variable control methods in bilateral teleoperation systems from the early 1990s to the early 2010s, highlighting advancements in trajectory tracking, wave integral, and multi-DOF (Degrees of freedom) systems. Shimono et al.’s paper [5] provides an overview of haptic motion control techniques for physical human support from the early 2000s to 2008, focusing on acceleration-based bilateral control and flexible actuation. Muradore et al.’s review [6] offers insights into bilateral teleoperation algorithms from the early 1990s to the early 2010s, emphasizing methods to ensure system stability in the presence of communication delays, such as wave variables, PD (Proportional-Derivative) control with passivity terms, and time domain passivity approaches. Concurrently, force sensors began to be incorporated into bilateral teleoperation system designs [7–9]. However, it should be noted that force and haptic feedback were not prominent features in these early conceptualizations.
The period from 2010 to 2023 witnessed significant advancements in force feedback within bilateral teleoperation systems, markedly enhancing the interaction between operators and remote environments or robotic systems [10–14]. This era saw the integration of sophisticated force feedback mechanisms, resulting in improved performance, stability, and realism across diverse teleoperated system applications [15–18].
Initial investigations into motion synchronization control for bilateral teleoperation systems predominantly employed adaptive fuzzy control methodologies [19]. Through the application of feedback linearization, researchers decomposed the nonlinear dynamics of teleoperation systems into two subsystems: local master/slave position control with unmodeled dynamics and delayed motion synchronization. Leveraging linear matrix inequalities and Markov jump linear systems, an adaptive fuzzy control strategy was formulated for nonlinear teleoperators subject to modeling uncertainties and external disturbances, capitalizing on the approximation capabilities of fuzzy logic systems [20,21]. Concurrent research efforts focused on the direct utilization of force sensor data for real-time force feedback transmission. To enhance system transparency and enable operators to perceive the environment before contact, researchers incorporated master velocity and distance signals into the force function [22–24].
The advantages of force feedback in bilateral teleoperation were further elucidated through analyses of delayed teleoperation systems. These studies demonstrated that adaptive inverse dynamics compensation and
Further advancements introduced variable force feedback gain to improve motion control accuracy by adapting feedback gain based on obstacle distances and their derivatives [27]. Position-based impedance control strategies were developed for trajectory tracking and adjustment based on feedback interaction force, optimizing both slave robot trajectory and interaction force [28].
In the field of surgical robotics, force feedback technology has been implemented to enhance the precision of minimally invasive procedures. By integrating bilateral teleoperation with haptic feedback controls, surgeons can now accurately gauge the forces exerted during robotic-assisted interventions [29]. Building upon these advancements, a novel approach called Surgical Audio Guidance (SurAG) has emerged as a promising complementary technology for enhancing feedback in minimally invasive procedures [30]. SurAG utilizes acoustic emission sensors placed at the proximal end of medical interventional devices to capture information about tip-tissue interactions non-invasively. This technology processes audio signals to extract valuable data about tissue boundaries, perforation events, and tissue textures, which can be translated into meaningful haptic feedback for clinicians. The non-invasive nature of SurAG, along with its compatibility with existing tools and potential for multi-modal integration, positions it as a versatile solution for improving tactile feedback across a wide range of minimally invasive interventions. This advancement allows for a more nuanced and tactile surgical experience, potentially improving patient outcomes and reducing the risk of tissue damage. Hybrid control structures combining force and position feedback were also optimized, enhancing control effectiveness in dealing with external disturbances in underwater teleoperation systems [31].
Throughout this period, the role of force feedback in bilateral teleoperation systems has been crucial for achieving accurate and stable control, significantly improving the ability of operators to perform precise remote tasks, despite the challenges posed by time delays and the complexity of the remote environment [32–34]. Force feedback adds a crucial layer of sensory immersion to the remote operation process. It allows operators to perceive attributes of objects and surfaces in the remote environment, such as texture, stiffness, and resistance, which are vital for accurate and safe task execution [35]. The tactile feedback provided by force feedback enables operators to make real-time precise adjustments and maneuvers. This is particularly crucial when executing fine tasks or working in environments where visual feedback alone might be insufficient [36]. Force feedback provides operators with a dynamic perception of the remote environment, including how objects respond to applied forces. This situational awareness is critical for collision avoidance, damage prevention, and making informed decisions during complex operations [37]. In scenarios where human presence poses risks or is impractical, such as space exploration or disaster response, force feedback allows operators to remotely explore and interact with the environment [38,39]. Force feedback aids in transferring operators’ skills, dexterity, and expertise to remote robotic systems. This is particularly valuable in fields like remote medicine, where robotic surgical systems can replicate a surgeon’s precise movements [40–43]. Integrating force feedback bridges the gap between human intuition and machine capabilities. It enables operators to leverage their natural tactile instincts, making interactions with remote systems more intuitive and seamless [44]. Force feedback helps prevent excessive force application, damage, and unintended consequences during remote operations. By perceiving resistance and constraints in the remote environment, operators can avoid situations that might lead to equipment malfunction or accidents [45–47]. Force feedback supports the training and skill development of both novices and expert operators. It offers a realistic simulation of real-world scenarios, allowing operators to practice and refine their techniques in controlled environments [48–50].
Essentially, force feedback stands as a fundamental component significantly enhancing the effectiveness and safety of bilateral teleoperation. It empowers remote operators to touch, sense, and interact with the remote environment, thereby boosting task performance, reducing errors, and enhancing overall efficiency across various cross-industry applications. However, this technology still faces numerous challenges in achieving motion transparency, stable control, and delay compensation. This review focuses on the current development status of force feedback bilateral teleoperation technology, systematically reviewing and analyzing research progress, key technologies, application practices, and future trends in this field. The graphical abstract is shown in Fig. 1.
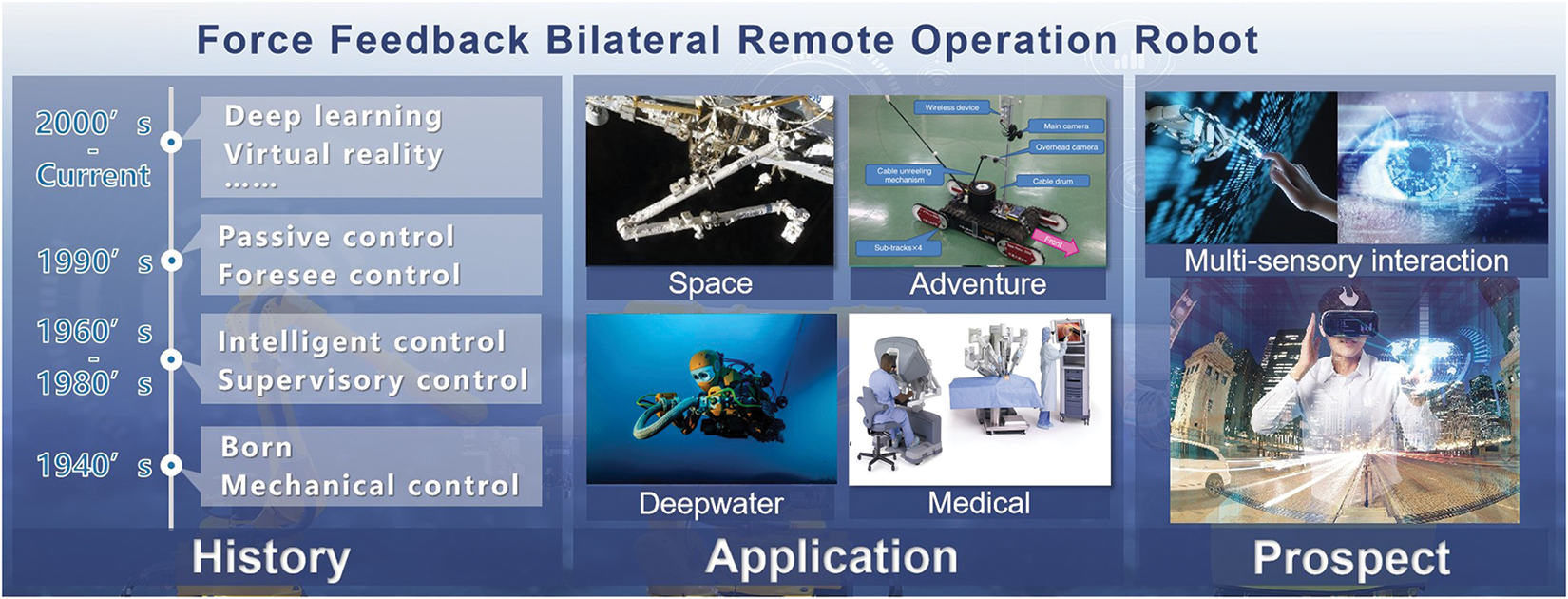
Figure 1: Graphical abstract of force feedback bilateral remote operation robot
Firstly, through bibliometric analysis, the review outlines the research history and hotspots of this technology. Secondly, it elaborates on core technologies such as modeling of force feedback bilateral control systems, coordinated control, stability and transparency analysis, and delay compensation. Thirdly, it reviews application cases and challenges faced in fields such as medical surgery, aerospace, and rescue operations. It highlights the scientific issues that urgently need to be addressed in this field and provides prospective analysis and suggestions for future development directions, aiming to provide reference and inspiration for relevant research.
This review aims to reflect the research landscape of force feedback bilateral teleoperation, clarifying the achievements and shortcomings of existing work, and delineating development directions to foster continuous innovation comprehensively and systematically in this field.
This review presents a systematic exploration of the research landscape and developmental trajectories in force feedback bilateral teleoperation technology, employing bibliometric analysis and data visualization methodologies. CiteSpace, a widely recognized tool for data visualization and analysis, has been utilized to generate thematic knowledge maps, highlighting key publications, research focal points, and emerging frontiers within this domain.
To facilitate researchers’, focus on cutting-edge developments and potential future directions in force feedback bilateral teleoperation technology, a comprehensive evaluation of pertinent literature was conducted. The Web of Science Core Collection database was queried using the search terms “Force Feedback” and “Bilateral Teleoperation,” with the temporal scope set from 2011 to 2023. Following deduplication, the search yielded 626 relevant journal publications. In addition to these journal publications, an analysis of conference proceedings during the same period revealed 678 conference papers related to bilateral teleoperation. While conference proceedings provide valuable insights into emerging trends and ongoing research, this review primarily focuses on journal articles for in-depth analysis, as they typically represent more mature and peer-reviewed research outcomes. However, we acknowledge the potential limitations of this approach and encourage readers to also consider recent conference papers as well as preprints available on platforms such as arXiv, which often showcase cutting-edge research before formal publication. These preprint repositories can offer valuable insights into the latest developments in the field.
Employing CiteSpace version 6.2.R4, we conducted a multi-faceted analysis of the literature, examining five key aspects to elucidate the developmental trends and research hotspots in this technological field: Chronological trends in literature production; Citation impact analysis of prominent journals; Keyword co-occurrence network analysis; Mutant terms analysis and time-series cluster mapping evaluation.
The trend in publication volume reflects the level of research activity in this field, while the ranking of cited journals indicates the main journals with high impact. Keyword co-occurrence analysis reveals the technological hotspots and time-mapping clustering intuitively shows emerging research directions and frontiers.
This bibliometric analysis method is comprehensive and multidimensional, effectively presenting the overall “picture” of the force feedback bilateral teleoperation technology field. The analysis results help to summarize the current status and shortcomings of existing work, clarify the trends in technology development, and provide a reference for related research.
Fig. 2 provides a visual representation of the annual publication output and its fluctuations in the field of force feedback bilateral teleoperation technology spanning from 2011 to 2023.
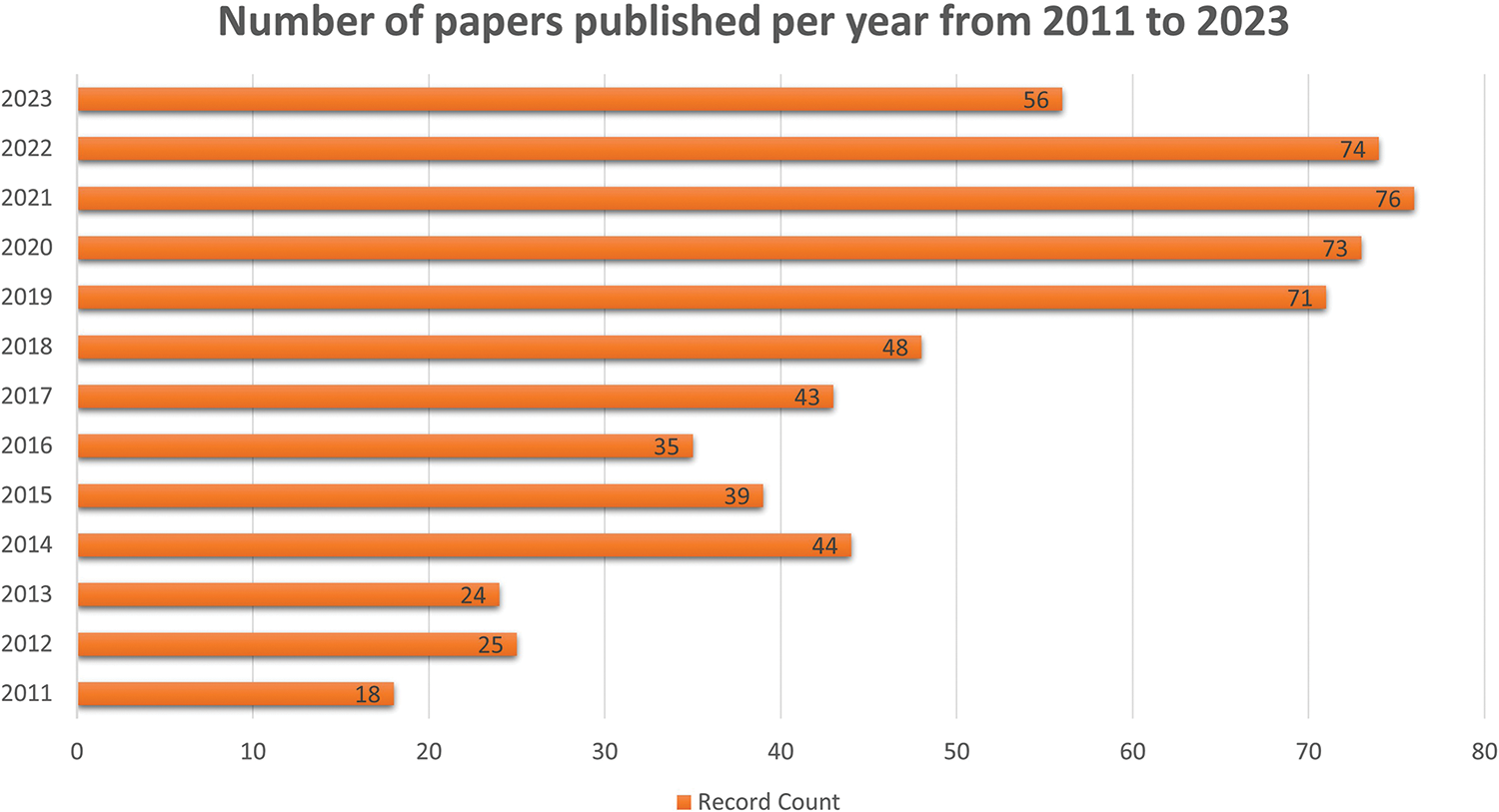
Figure 2: Annual publication volume in force feedback bilateral teleoperation technology (2011–2023)
Analysis of this data reveals a general ascending trend in research activity within this domain. Specifically, during the period from 2011 to 2014, the average annual publication volume remained relatively low, ranging from 20 to 40 papers, with an average of approximately 32 papers. In 2015, the publication volume reached 39 papers, slightly higher than the previous year, potentially signaling increased attention to research in this field.
From 2016 to 2018, the annual publication volume increased steadily, reaching 35, 43, and 48 papers, respectively, indicating rapid growth and continuously improving research activity. The year 2019 witnessed an explosive growth in publication volume, with 71 papers published, representing a nearly 50% increase compared to 2018, indicating widespread academic attention to this field.
After entering 2020, the annual publication volume has consistently remained at a high level, with 73 papers in 2020, 76 papers in 2021, 74 papers in 2022, and 56 papers in 2023, reflecting the current research boom in this field.
As a frontier technology in the fields of robotics and teleoperation, the development of force feedback bilateral teleoperation technology was relatively slow before 2015. However, since 2015, the annual publication volume has increased substantially year by year, particularly experiencing explosive growth starting in 2019. The widespread attention from the academic community has propelled the vibrant development of this field, which currently maintains a high level of research activity.
2.2 Analysis of Cited Journals
Using publication volume as the statistical indicator, Table 1 displays information on common journals. This includes publisher details, journal names, publication volume statistics, CiteScore, and impact factor (IF) statistics.
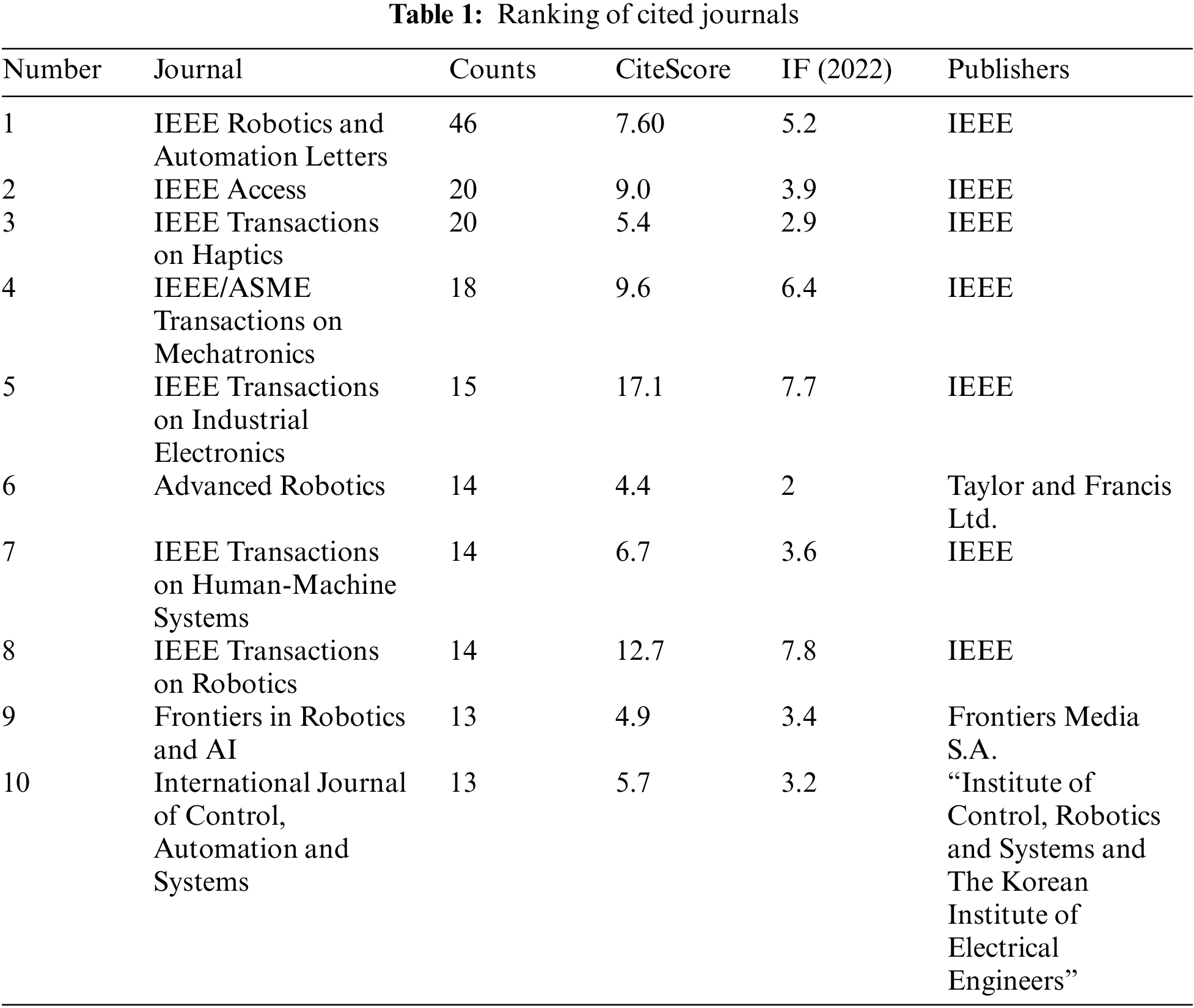
Based on the data in Table 1, we can analyze the main journals in the field of force feedback bilateral teleoperation technology as follows:
Journal Rankings and Quantity: The main journals in this field are predominantly from the IEEE portfolio, occupying the top 5 positions. Among them, IEEE Robotics and Automation Letters have the highest publication volume, with 46 papers; followed by IEEE Access and IEEE Transactions on Haptics, with 20 papers each.
Journal Impact: In terms of CiteScore, IEEE Transactions on Industrial Electronics has the highest score of 17.1, reflecting its significant influence in the field of industrial electronics and related areas. The following closely are IEEE Access with a score of 9.0 and IEEE/ASME Transactions on Mechatronics with a score of 9.6.
Latest Impact Factors: According to the 2022 IF rankings, IEEE Transactions on Industrial Electronics ranks first in the field with an IF value of 7.7, followed by IEEE Robotics and Automation Letters with 5.2 and IEEE Access with 3.9.
Other Important Journals: Apart from the IEEE series, journals such as Advanced Robotics (published by Taylor & Francis), Frontiers in Robotics and AI (published by Frontiers Media S.A.), and International Journal of Control, Automation and Systems are also significant publications in this field.
Publishing Institutions: The journals are mainly published by well-known academic publishers such as IEEE and ASME, with some contributions from commercial publishing institutions, reflecting the diversified development trend in this field.
2.3 Keyword Co-Occurrence Analysis
CiteSpace’s keyword co-occurrence analysis effectively illuminates research hotspots in force feedback bilateral teleoperation.
To capture recent trends, we extended the data scope from 30 December 2023, to 01 March 2024. This analysis yielded a network of 272 keywords connected by 813 edges, focusing on relevant technologies and challenges. Fig. 3 visualizes the top 25 keywords based on co-occurrence frequency.
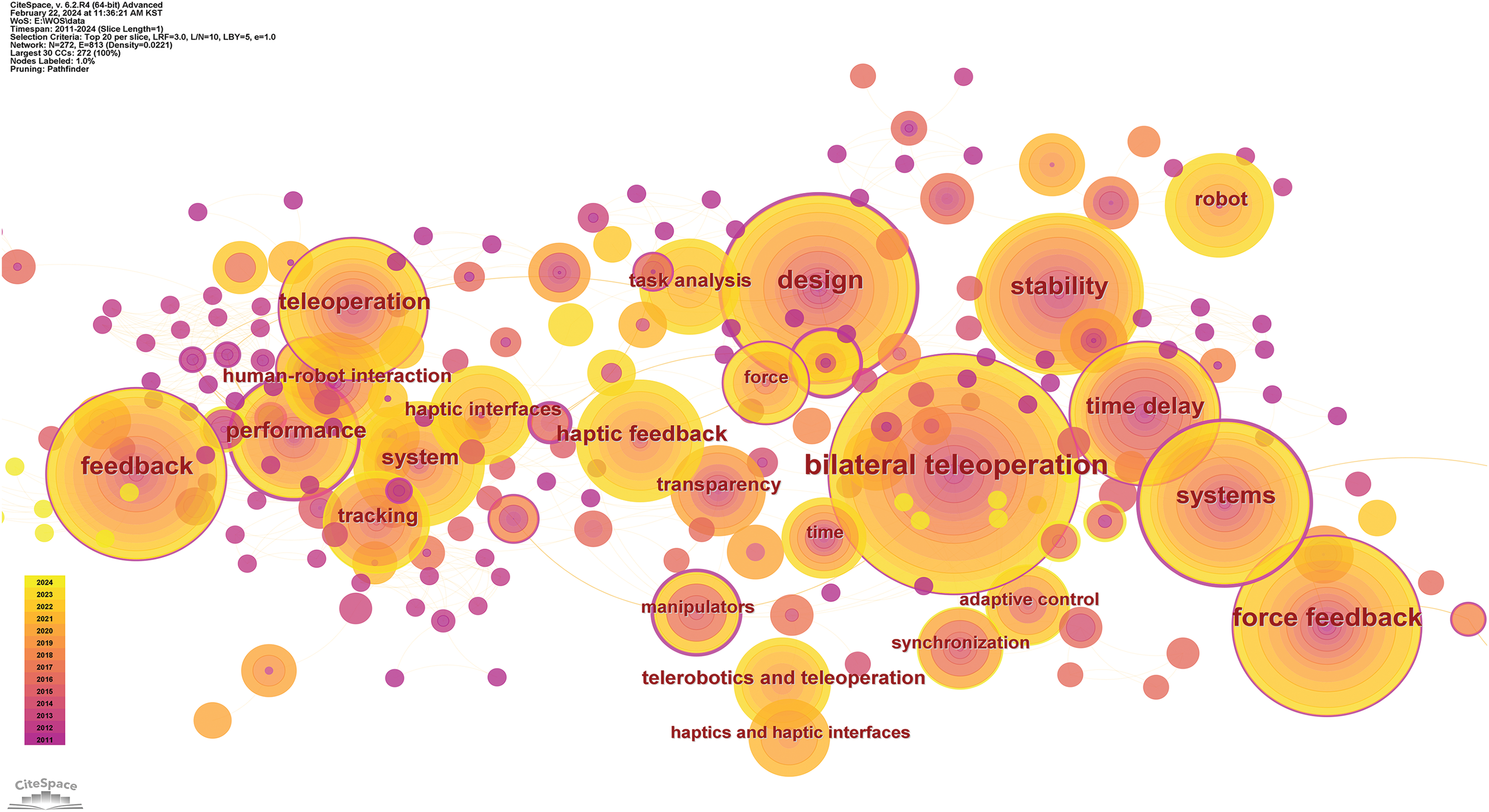
Figure 3: Keyword co-occurrence network in force feedback bilateral teleoperation research (Top 25 keywords)
In this representation: Node size corresponds to the number of articles containing each keyword; Interconnecting lines depict relationships between keywords; Purple outer circles indicate keywords with higher betweenness centrality.
From the clustering distribution, the main themes in Fig. 3 can be roughly categorized as follows: Remote operation systems and interaction (teleoperation system, human-robot interaction, haptic interfaces): This area focuses on the design of robot teleoperation systems and the development of human-machine interaction interfaces, particularly in the transmission of perceptual information such as haptic feedback.
a) Operational performance evaluation (task analysis, performance, tracking, time delay, stability): Analysis and evaluation of the operational performance, time delay, and stability of remote operation systems are crucial for ensuring reliable system operation.
b) Control and mechanism design (design, force, manipulators, adaptive control, synchronization): Proper design of robotic arm mechanisms, force feedback control, and adaptive control techniques are essential for achieving precise and coordinated remote operations.
c) System transparency and intelligence (transparency, robot, systems): System transparency enhances users’ perception of remote environments, while intelligent techniques hold promise for increasing the automation level of remote operations.
Looking at the changes over the years, early research focused on the basic architecture of remote operation systems and human-machine interaction techniques such as haptic feedback. In recent years, adaptive intelligent control, robot autonomy, and enhanced transparency have become research hotspots, aiming to further improve the performance and user experience of remote operations.
The Mutant terms analysis, generated by CiteSpace, provides insights into keyword evolution in academic literature, revealing research dynamics and trends in force feedback bilateral teleoperation. Table 2 presents the top 20 mutant keywords exhibiting significant citation bursts in this field.
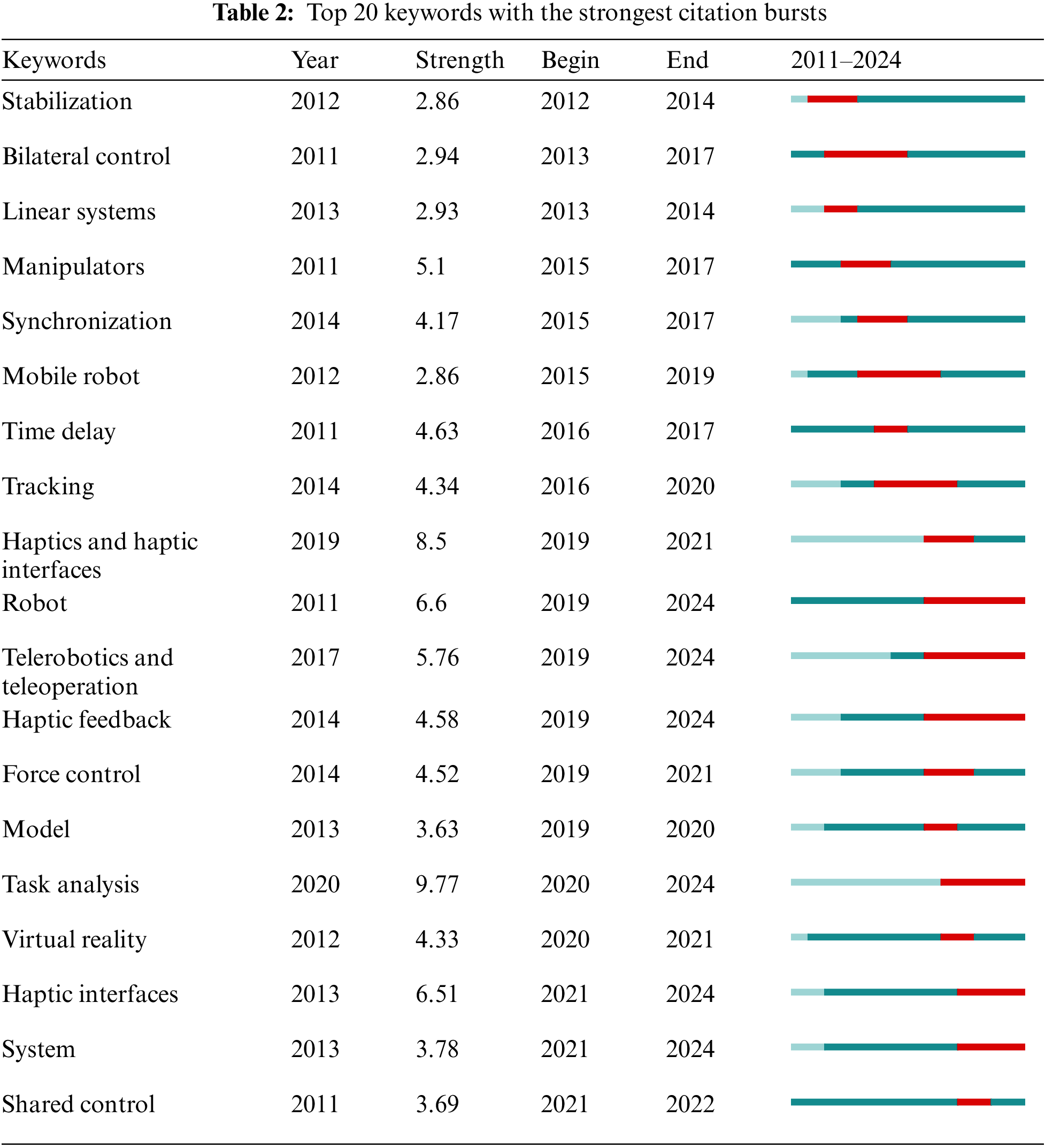
Based on the displayed keywords and their time spans in the graph, we can observe the following key phenomena of keyword mutations:
Initially, around 2011, emphasis was placed on developing remote operation systems and constructing robotic hardware, as indicated by the emergence of terms like bilateral control and manipulators.
Subsequently, during 2013–2014, a surge in basic theoretical research, including linear systems and stabilization, laid the groundwork for system optimization and control strategies. Around 2015, attention shifted towards improving real-time performance and expanding application scenarios, with concepts such as synchronization and mobile robots gaining prominence.
The years 2016–2017 saw a focus on addressing challenges like time delay and tracking to enhance operational accuracy and reliability. A significant mutation occurred in 2019, marked by the rapid emergence of keywords like haptics, teleoperation, and haptic feedback, signifying a period of accelerated development.
In 2020, the focus shifted towards intelligence and interactive experiences, with the emergence of terms like task analysis and virtual reality. Post-2021, continued attention was directed toward shared control, system integration, and expanding application domains.
These keyword mutations reflect the continuous evolution of research content and directions in this field, from early basic research to system integration, and then to intelligence and diverse applications, demonstrating the progressive process of its technological development.
2.5 Clustering Timeline Mapping
The temporal clustering of keywords, visualized through CiteSpace, provides a dynamic perspective on the evolution of research themes within force feedback bilateral teleoperation. Fig. 4 presents this timeline graph, offering insights into the chronological development of key concepts and research fields.
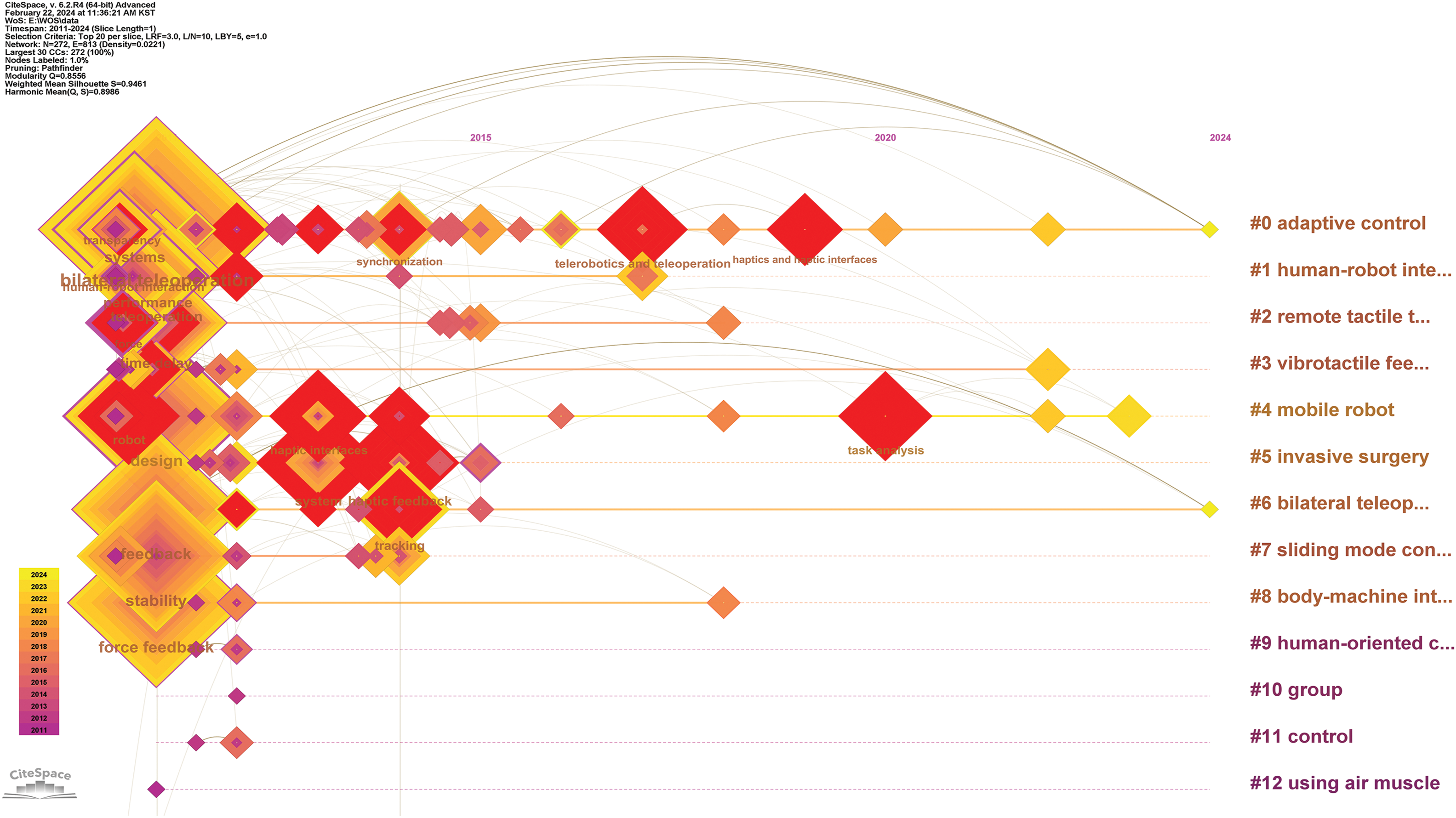
Figure 4: Clustering timeline mapping
In this visualization, purple outer circles denote keywords with higher betweenness centrality, indicating terms that bridge different research areas or concepts. Red points signify keywords with higher burst values, highlighting terms that have experienced sudden increases in usage, potentially indicating emerging trends or breakthrough areas.
Early stage (around 2011): Research primarily focused on foundational areas such as system design, force feedback, and stability control, laying the groundwork for the reliability and controllability of remote operation systems.
Around 2015: Hotspots emerged including synchronization control, remote operation robots, and human-machine interaction interfaces, reflecting the demand for improving real-time performance and interaction experience in remote operations.
Around 2020: Concepts such as bilateral teleoperation and task analysis began to gain prominence, indicating the urgent need to enhance operational precision and adaptability to diverse environments.
Recent years (approximately 2024): Emerging application domains such as vibrotactile feedback, mobile robots, and surgical robots started to emerge, indicating the widespread penetration of remote operation technology into various industries. Additionally, intelligent techniques such as adaptive control are increasingly receiving attention.
Early-stage research focused on foundational system construction, mid-term research emphasized improving real-time performance and interaction, and recent developments have expanded into diverse application scenarios with a focus on intelligent control. In recent years, researchers have focused more on sensing and control algorithms, hoping to achieve a more intelligent realm of force feedback remote operation robots through the development of contact feedback, deep learning, virtual reality and other technologies [51–54].
Teleoperation refers to the operation of machinery remotely, providing operators with the capability to manipulate objects from a distance. At the operator’s interface, typically a robotic arm or control lever, referred to as the main robot arm end or the master, is employed.
This interface closely mirrors the setup present at the remote location. At the remote location, the mechanical arm is referred to as the slave or follower robot arm. Motion commands are transmitted from the master to the slave via a communication link, enabling control of the slave’s operations.
When the operator exerts force and moves the primary robotic arm, the slave replicates these movements to perform tasks.
Fig. 5 presents a typical schematic diagram of this remote operation system.
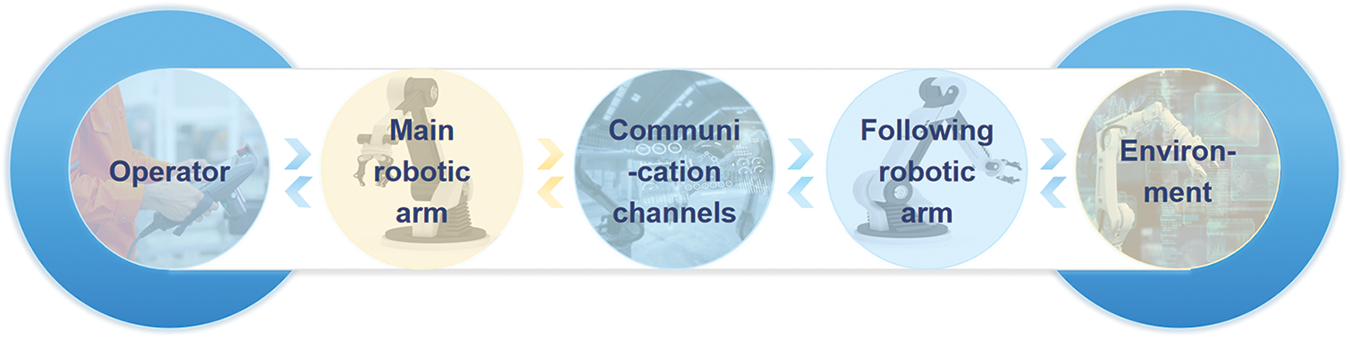
Figure 5: Force feedback bilateral remote operating system structure
When the slave incorporates a high-quality sensor, it can detect and relay the reaction force generated during task execution back to the master through the communication link. This enables the integration of the sensed force into the master’s input torque, creating a feedback loop.
This setup, known as force feedback bilateral remote operation, enhances the operator’s sensory perception of the remote environment [55–58].
This section will analyze the development of force feedback bilateral teleoperation by examining key technologies such as stability and transparency analysis of force feedback and motion, modeling and control algorithms for force feedback bilateral control systems, among others.
3.1 Key Concepts: Transparency
Transparency, a crucial concept in force feedback bilateral teleoperation, quantifies how accurately the remote environment is conveyed to the operator. Lawrence defined it as the operator’s ability to perceive the remote environment through the force-reflecting teleoperator [59].
For linear bilateral teleoperators, transparency is measured using a hybrid matrix
where
The
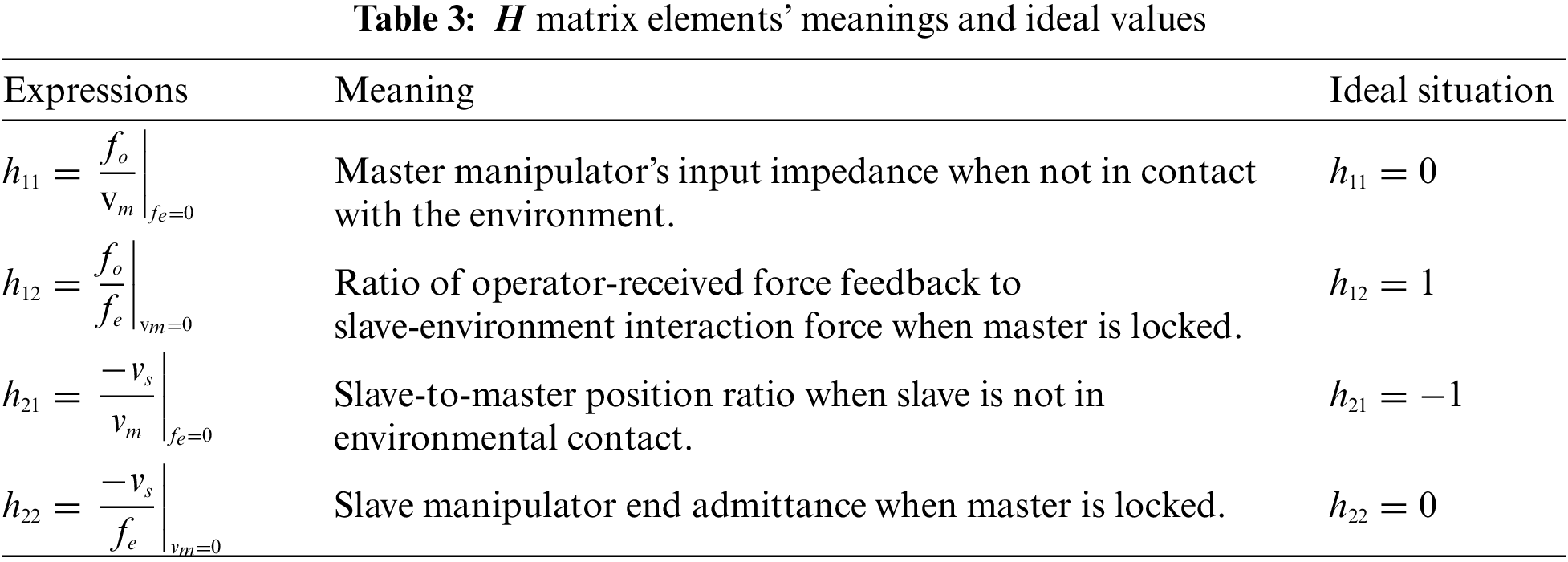
An ideally transparent system’s hybrid matrix
Achieving this ideal
3.2 Control Structure Research
Force feedback bilateral teleoperation systems are primarily categorized into two-channel and four-channel structures, based on the number of communication ports. This section examines several traditional architectural designs within these categories, highlighting their key features and operational principles. By exploring these foundational structures, we aim to provide insight into the evolution and diversity of teleoperation system designs, setting the stage for understanding more advanced and contemporary approaches in the field.
3.2.1 Position-Position Control Structure
The Position-Error Based (PEB) control structure, also known as position-position control, implements position control at both master and slave ends. Its primary objective is to minimize position discrepancies between master and slave manipulators. This structure’s simplicity is its main advantage, allowing the slave to effectively track the master’s position [65–67]. Fig. 6 illustrates this control structure.
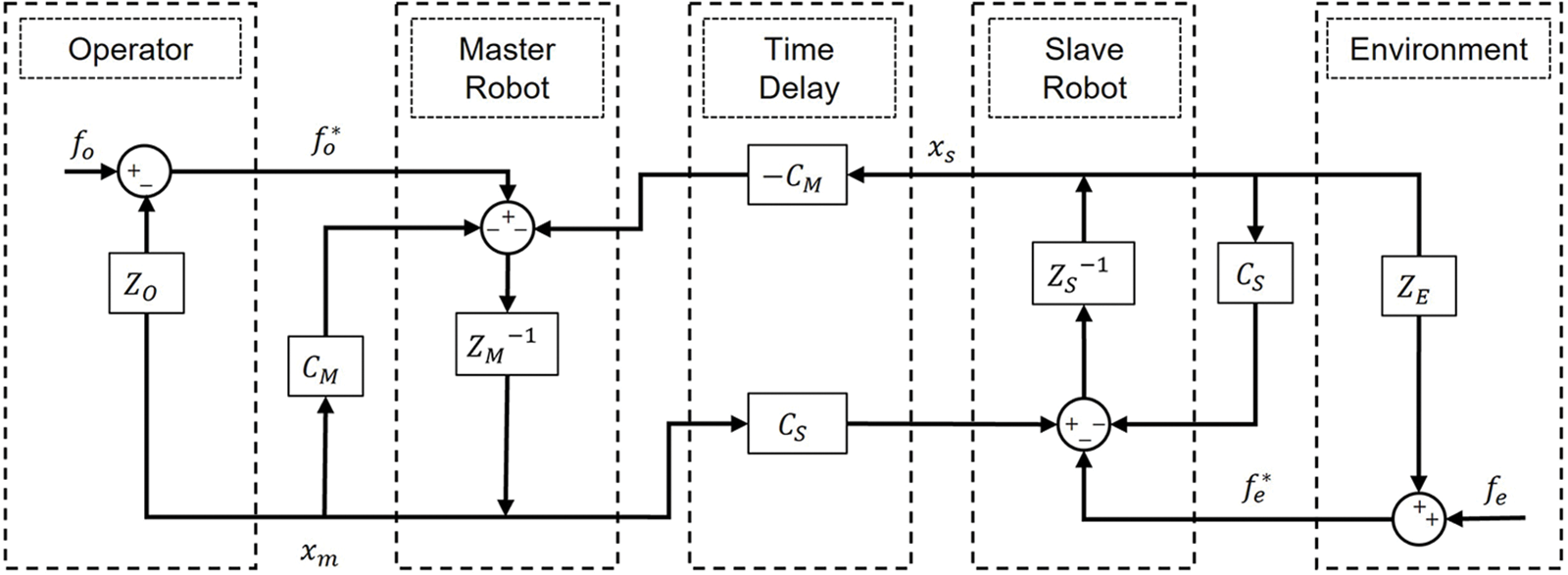
Figure 6: Position-position control structure
In this diagram,
Based on the mixing matrix
The total slave-side impedance is denoted as
Analyzing Eq. (3) reveals that
3.2.2 Force-Position Control Structure
The force-position control structure, Direct Force Reflection (DFR), employs force control on the master side and position control on the slave side. Fig. 7 illustrates this control structure.
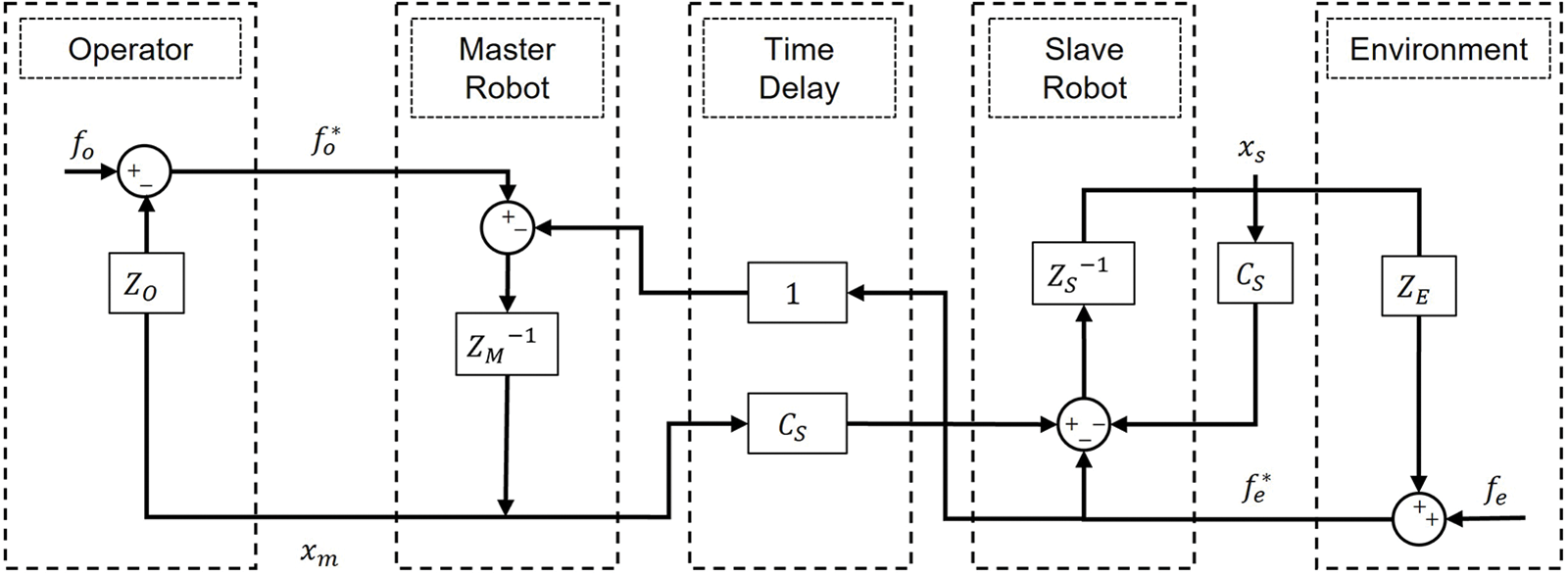
Figure 7: Force-position control structure
This configuration enables near-perfect force tracking, allowing the operator to perceive forces equivalent to those between the slave and the environment. However, when the slave is unloaded, the operator may sense inertial forces from the master side [68,69].
Using the mixing matrix
where
Analysis of Eq. (4) reveals that
Compared to the position-position structure, the force-position structure’s
3.2.3 Impedance Control Structure
The impedance control structure, also referred to as Shared Compliant Control (SCC), shares similarities with DFR but differs primarily in controller design. This structure achieves optimal force tracking, though operators may experience master-side inertial forces when the slave is unloaded. Its position-tracking performance is relatively inferior to other structures [70–72]. Fig. 8 depicts this control configuration.
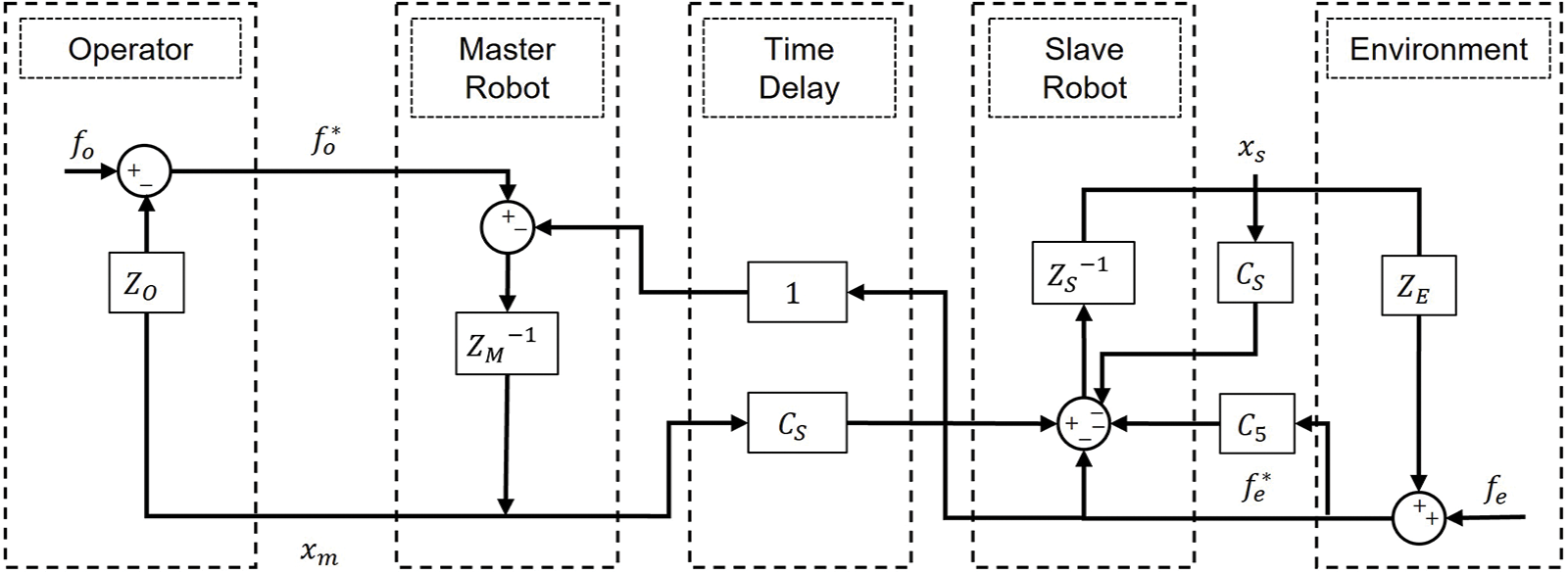
Figure 8: Impedance control structure
The key distinction from the force-position structure is the addition of a controller
where
Eq. (5) reveals that
3.2.4 Four-Channel Control Structure
The four-channel control structure offers a versatile framework capable of implementing the previously mentioned dual-channel structures and potentially achieving theoretically full transparency through the adjustment of four control parameters [73–76].
Fig. 9 illustrates this structure, where position signals from master and slave manipulators, operator-exerted force on the master, and environment-slave interaction force are utilized as mutual transmission signals.
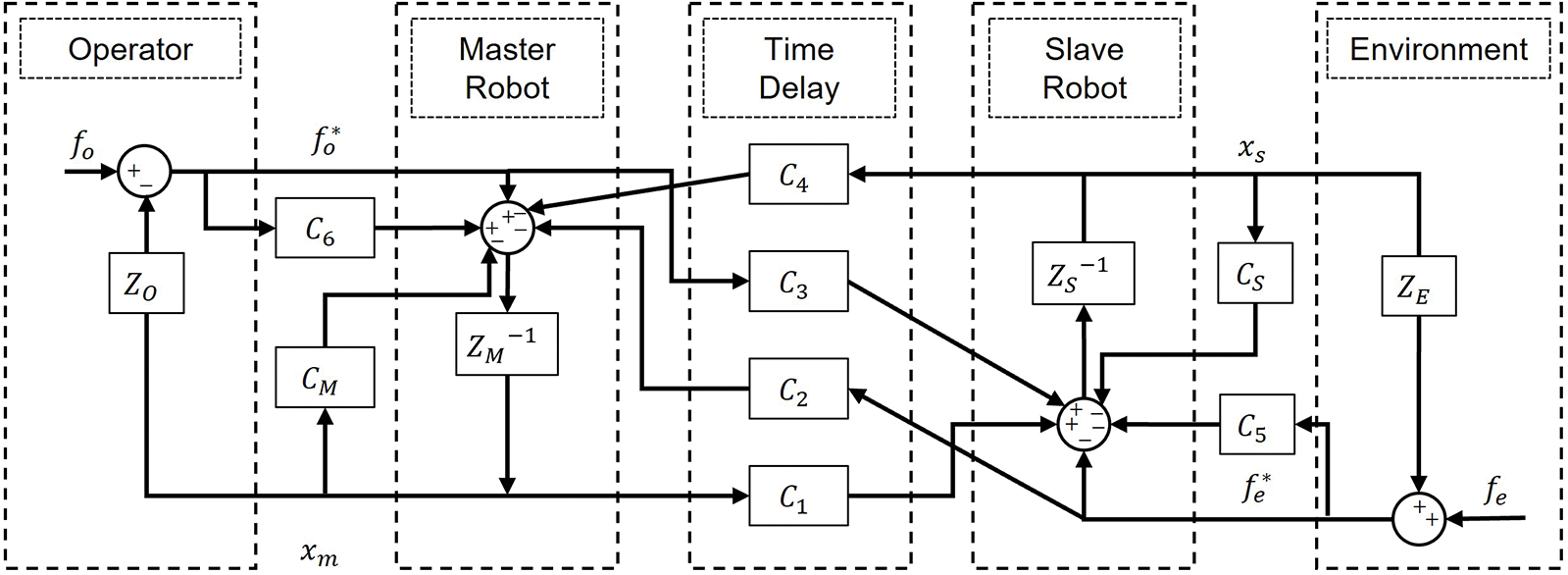
Figure 9: Four-channel control structure
The control parameters
From Fig. 9, the
where
To achieve full transparency in the bilateral teleoperation system with force feedback, parameters
While the four-channel control structure theoretically offers ideal transparency in force feedback bilateral teleoperation systems through parameter adjustment, it requires precise mathematical models of both master and slave manipulators to meet transparency requirements [77–81]. It’s noteworthy that the operator’s working environment typically operates at low frequencies, where mathematical models tend to be more accurate. The significance of high transparency is also primarily observed in these low-frequency conditions.
3.3 Control Algorithm Research
In the realm of force feedback bilateral teleoperation systems, the temporal latency within communication channels emerges as a critical consideration. This temporal delay phenomenon can be classified into two primary categories: fixed yet undisclosed delay and fluctuating but undisclosed delay [82–84]. The presence of these delays significantly impacts system performance and stability, necessitating specialized control strategies. This section will review the control algorithms of force feedback bilateral teleoperation systems from these two perspectives.
The wave variable algorithm [85] converts force variables into wave variables for transmission, ensuring system passivity. This approach assumes an unknown but constant communication delay. It introduces a characteristic impedance parameter that influences the relationship between wave and force variables. Fig. 10 illustrates the algorithm’s structure, demonstrating the reversible nature of the variable conversion process.
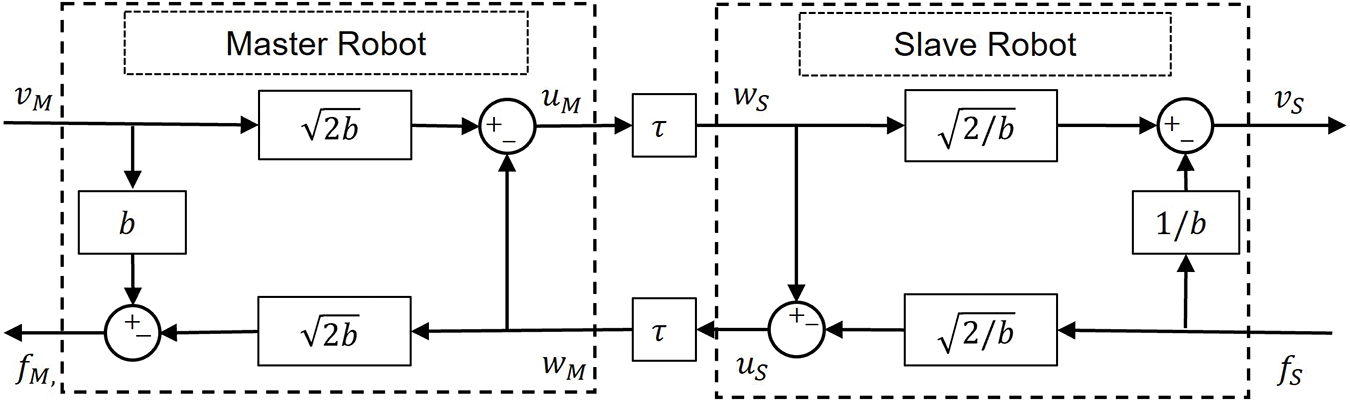
Figure 10: Wave variable algorithm structure diagram
In this diagram,
The variable conversion in the wave variable algorithm is reversible. That is, the wave variable can be converted into a force variable, as shown in Eq. (9):
The communication channel time delay is represented by
When
D’Amore et al. [86] explored the transparency and adjustment of wave-based bilateral teleoperation systems in their study. They pointed out that using force feedback in teleoperation systems may lead to instability in communication delays. The study analyzed the trade-offs between transparency and impedance parameters and proposed an optimal solution based on linear system theory. They introduced a feedback nulling scheme that eliminates the trade-offs present in classical wave-based approaches.
Ferraguti et al. [87] proposed a novel approach for stabilizing delay communication channels using wave variables in bilateral teleoperation architectures. The authors utilized wave variables to store the exchanged energy between the master stations and slave stations while adjusting the input power to achieve the desired transparency behavior.
Huang et al. [88] developed a four-channel control design based on enhanced wave variables to address the issue of decreased transparency due to the poor robustness of traditional wave variable algorithms in bilateral teleoperation systems. The study proposed a delay compensator based on modified wave transformation and local force feedback to ensure stability and further enhance transparency performance. By reducing wave reflections, the compensator aims to compensate for distortions.
The wave variable approach offers a robust method for handling unknown constant delays in force feedback bilateral teleoperation systems, providing a balance between stability and performance. The advantage of the algorithm is its simple structure, but the characteristic impedance parameter needs to be adjusted according to the communication delay, and the response is relatively slow during free motion.
3.3.2 PD Control with Dissipative Term Algorithm
The PD Control with Dissipative Term algorithm [89–91] enhances bilateral teleoperation system stability by incorporating a dissipative element into PD controllers on both master and slave sides. This approach is particularly effective for fixed unknown delay scenarios. The dissipative term’s magnitude correlates with the estimated maximum round-trip delay. Fig. 11 depicts the algorithm’s structure.
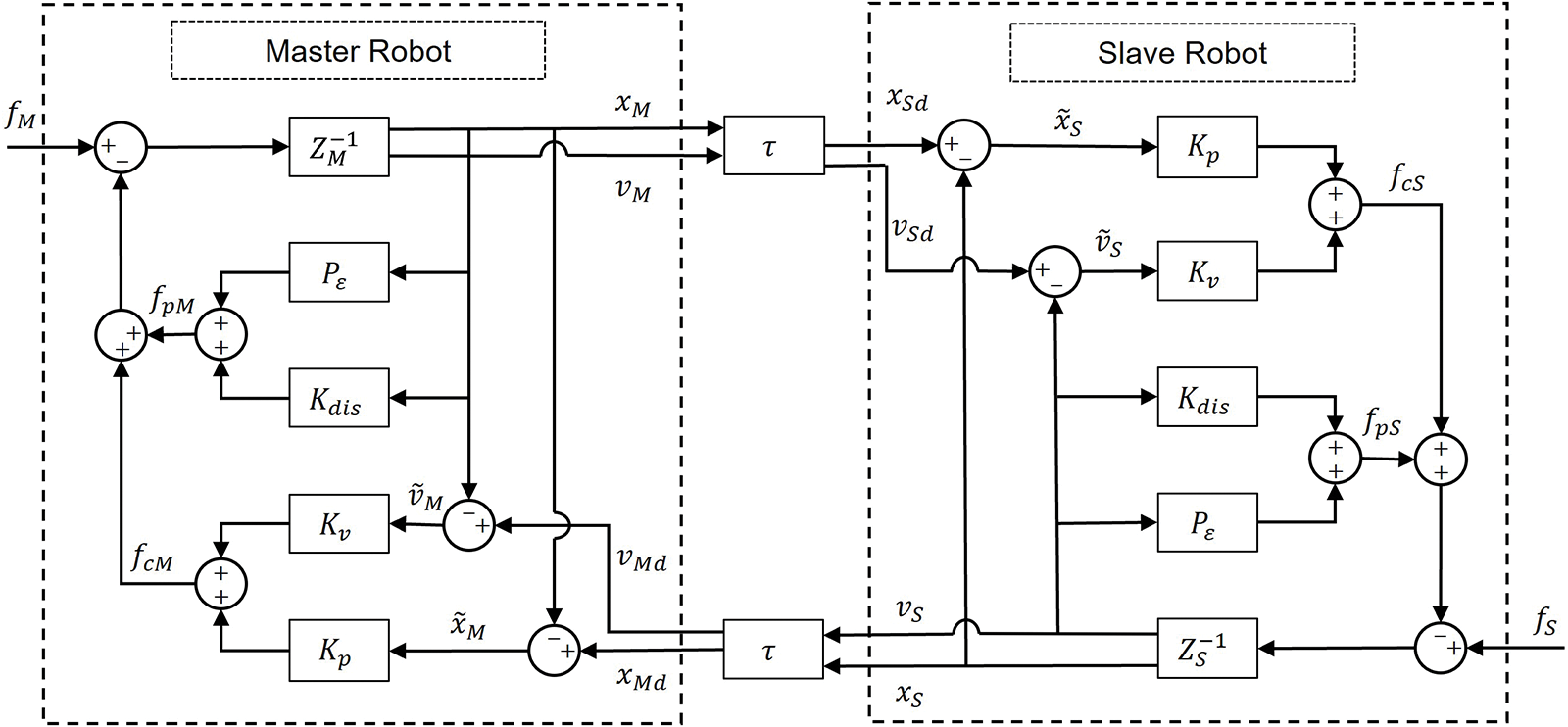
Figure 11: PD control with dissipative term algorithm structure diagram
In this configuration,
The formulas for the master and slave end robot controllers are shown in Eq. (11):
The formula for the control force of the master and slave manipulators is shown in Eq. (12):
The position/speed tracking error is shown in Eq. (13):
Chen et al. [92] explored Cartesian space bilateral control for time-varying delayed teleoperators, developing a PD controller with dissipation using quaternion-based attitude error calculation. They employed local damping at system endpoints to mitigate delay-induced instability. The dissipation factor reduced delay-variation potential energy, enhancing stability.
Ghavifekr et al. [93] examined sampling effects on discrete-time bilateral teleoperation stability. They proposed a sampled-data PD + dissipative controller for stability amid time delays and varying sampling rates. This approach uses the maximum sampling period’s lower bound as a stability criterion, highlighting sampling time’s importance for system transparency and stability.
The advantage of the algorithm is its intuitive structure, but the response speed is affected by the PD gains and dissipative term, and the dissipative term needs to be adjusted online.
Adaptive algorithm [94–97] employs adaptive control and a proportional controller, ensuring stability by estimating system parameters. Compared to PD control, the proportional controller has a simpler structure. Fig. 12 depicts the adaptive algorithm’s structure.
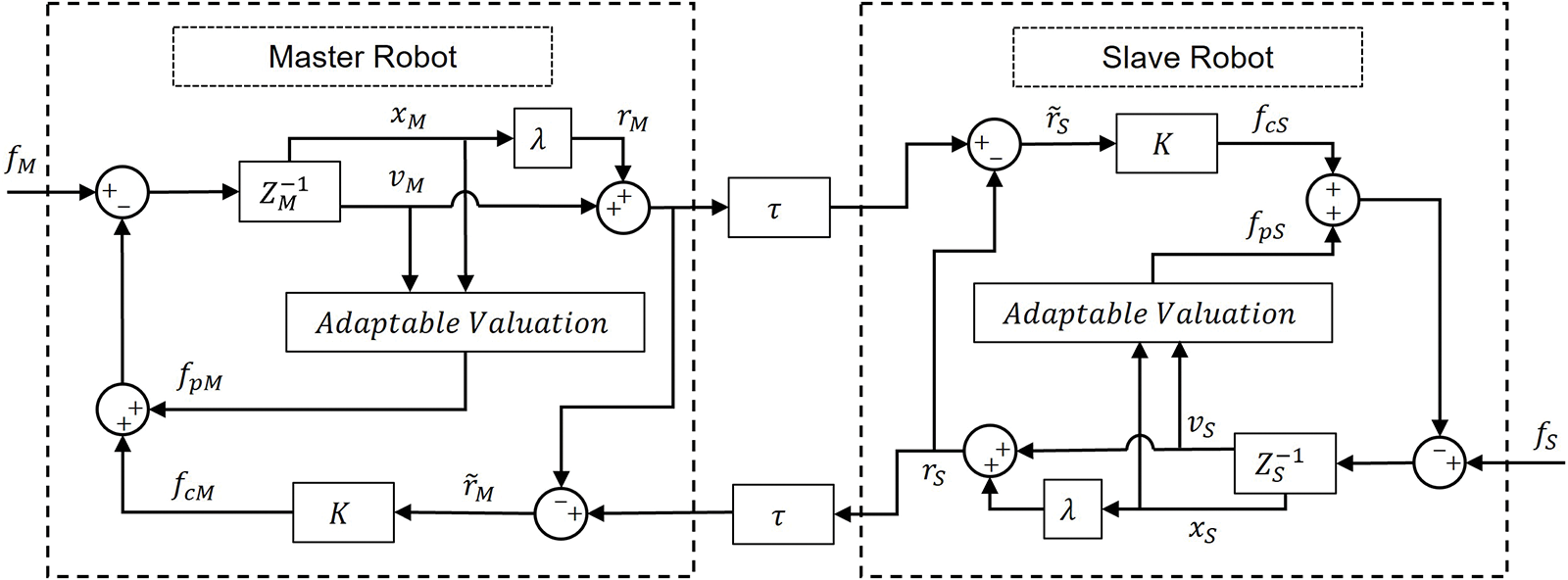
Figure 12: Adaptive algorithm structure diagram
In this adaptive control setup,
At both ends of the master and slave manipulators, the adaptive estimation module estimates the inertia coefficient and damping coefficient of the DC motor, respectively. Specifically, as shown in Eq. (15):
Among them,
The complete control formula of the master and slave manipulators is shown in Eq. (16):
where
Gao et al. [98] introduced a reversible mapping method with object adaptation, enabling online motion mapping that considers object or tool positions in operational tasks. This approach generates adaptable trajectories for moving objects, enhancing system flexibility. The algorithm incorporates an impedance controller, allowing haptic feedback-based remote robot operation, thus improving user immersion and operational efficiency.
Michel et al. [99] developed an adaptive impedance control framework for contact tasks, utilizing Learning from Demonstration (LfD) to acquire variable stiffness control strategies. This method commands remote manipulators and adjusts environmental interactions based on sensed forces, with stiffness continuously adapted to external forces. The framework constructs a symmetric positive definite stiffness matrix for the robot’s impedance controller, enabling motion-direction adaptation. This approach enhances remote operation safety by reducing oscillations, improving smoothness, and maintaining consistent tracking errors.
Mehrjouyan et al. [100] proposed a nonlinear bilateral teleoperation system design based on a robust observer-based adaptive control law. Their adaptive torque observer improves system robustness by introducing auxiliary terms in the control loop, enhancing performance under uncertainties. This observer also compensates for force sensor effects, addressing the challenge of measuring joint accelerations in robotic systems.
The advantage of the algorithm is that it does not require an accurate model, but the discretization of the adaptive estimation affects the performance, and the transparency depends on the selection of control gains.
3.3.4 The Passive Set-Position Modulation (PSPM) Algorithm
The Passive Set-Position Modulation (PSPM) algorithm modifies the position signal values to satisfy the passivity condition, thereby ensuring system stability [101–103]. It explicitly considers the issue of spring energy buildup leading to instability. The PSPM algorithm adopts a position-position structure, where the initial position signals
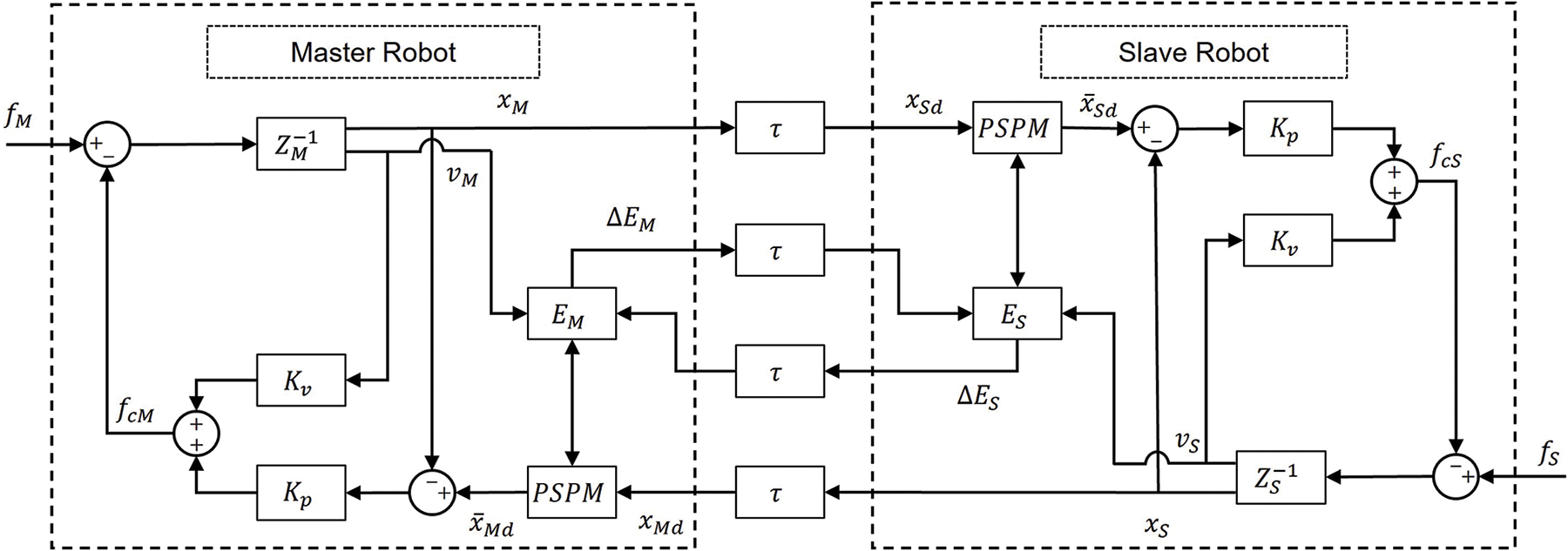
Figure 13: PSPM algorithm structure diagram
The PSPM module solves the following minimum problem, as shown in Eq. (18):
where
In this PSPM structure,
Yang et al. [104] developed a tactile remote driving control framework for Wheeled Mobile Robots (WMRs), incorporating WMR dynamics, kinematics, and various driving modes. They employed the PSPM algorithm to ensure passivity or a passivity/stability combination in the closed-loop teleoperated system. This framework facilitates master-slave WMR coordination, addressing spatial scale discrepancies.
Abi-Farraj et al. [105] proposed a shared control architecture for visual information-based remote object teleoperation. This system allows operators to control two robotic arms—one with a gripper, another with a camera—for nuclear waste classification and segregation. The PSPM algorithm ensures master device input/output passivity through signal modulation. The architecture adjusts gripper motions based on camera input while the operator controls other motions.
The innovation of the algorithm lies in its signal modification strategy under energy constraints, but it requires solving an optimization problem, and the transparency is related to the energy exchange strategy. Due to the initial assumption of the PSPM algorithm that the local controllers are continuous while only the communication channel is discrete-time, it is necessary to consider that the local controllers are also discrete-time in practical applications. The performance of the algorithm is related to the ratio of the sampling time of the network to the sampling time of the controller.
3.3.5 Two-Layer Architecture Algorithm
The two-layer algorithm [106–108] adopts a hierarchical design, with the top layer controlling transparency and the bottom layer ensuring passivity. Fig. 14 illustrates the structural diagram of the dual-layer algorithm, which adopts a position-force architecture.
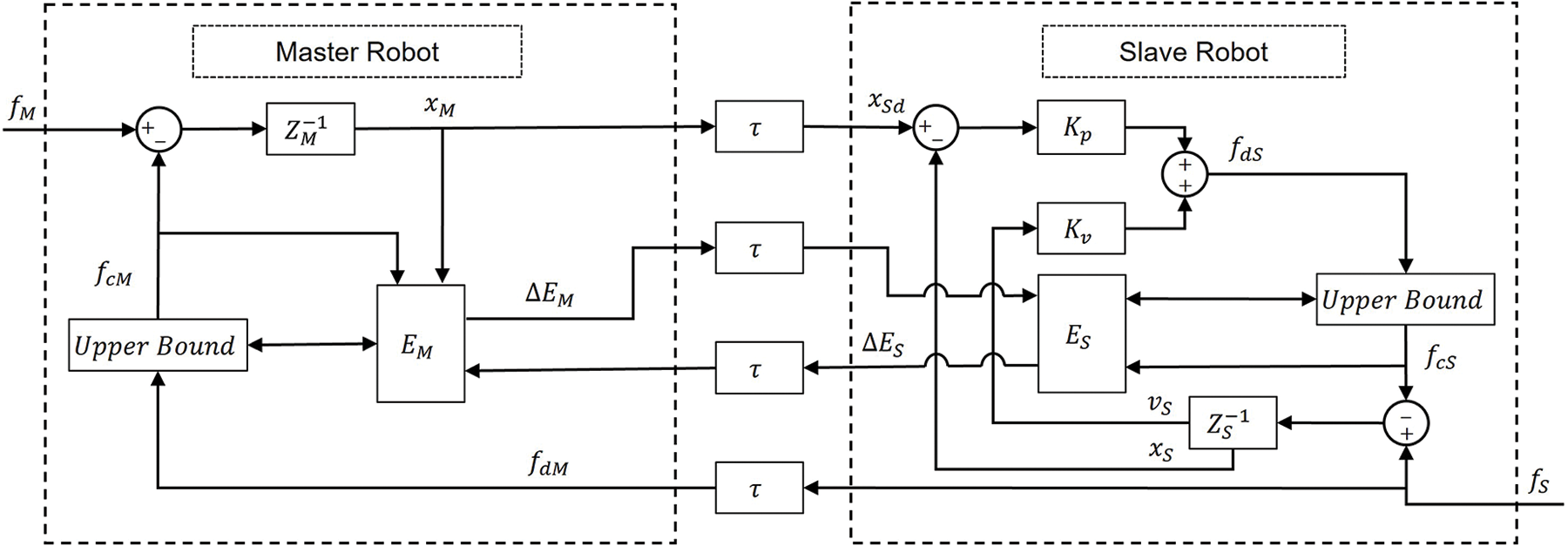
Figure 14: Two-layer architecture algorithm structure diagram
The energy storage
Among them,
where
Energy
The two-layer algorithm’s structure bears a striking resemblance to the PSPM algorithm, with one crucial distinction setting them apart: in the two-layer approach, the command signal is calculated before conducting the passivity check. This subtle yet significant difference allows for more flexibility in control design while maintaining system stability.
Minelli et al. [109] introduced a two-layer architecture specifically designed for multi-arm bilateral teleoperation systems operating under the challenge of communication delays. This innovative approach marks a significant step forward in enhancing transparency by ingeniously separating the control structure into two distinct layers, thereby effectively reducing conservatism in control design. The upper layer is dedicated to implementing sophisticated transparency strategies, focusing on improving the operator’s perception and interaction with the remote environment. Meanwhile, the lower layer is tasked with the critical role of maintaining passivity, ensuring overall system stability regardless of network conditions. This clever structural division allows for a more holistic treatment of multi-master multi-slave (MMMS) teleoperation systems, paving the way for achieving high-fidelity and transparent behavior in complex teleoperation scenarios.
In further work, Minelli et al. [110] developed a novel two-layer architecture for multi-arm bilateral teleoperation. This design incorporates a shared energy tank concept to maintain passivity and stability despite communication delays. The transparency layer utilizes a virtual damping-spring model connecting the master tool manipulator (MTM) and patient-side manipulator (PSM), with transparency strategies adjusted via gain matrices and tracking error definitions.
Sartori et al. [111] proposed a two-layer teleoperation algorithm for remote echo tracking, addressing stability and availability issues in delayed communications. This approach ensures stability even with unknown and time-varying delays. It employs a passivity-based bilateral teleoperation architecture to stabilize tele-echo tracking systems, accommodating differing energy requirements between master and slave robots. An energy scaling factor mechanism maintains passivity in the two-layer structure, enabling various control strategies without requiring precise robot models, only approximate inertia ratios.
The two-layer algorithm’s primary advantage lies in its clear and well-defined hierarchical approach to teleoperation control. This structure allows for more intuitive design and troubleshooting of complex teleoperation systems.
3.3.6 Energy-Based TDPA Algorithm
The Energy-Based TDPA (Time Domain Passivity Approach) algorithm [112–115] employs a passivity observer (PO) to measure input and output energy, and a passivity controller (PC) to activate dissipative elements when energy becomes excessive. Fig. 15 illustrates this algorithm’s structure.
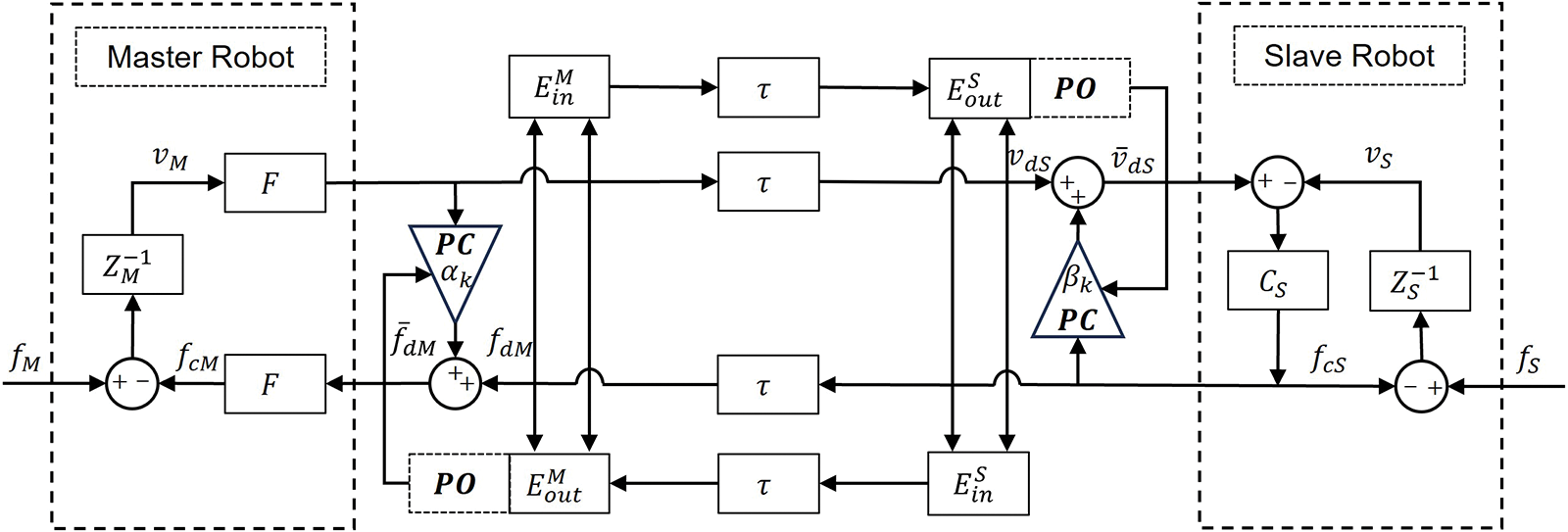
Figure 15: Energy-based TDPA algorithm structure diagram
In this diagram,
The PO calculates the energy leaving or entering the master and slave manipulators. These energies are monotonically increasing, as shown in Eq. (23):
where
When the force feedback bilateral teleoperation system is about to show unstable performance, the PC activates the dissipative elements
Among them, the definitions of
Xu et al. [116] proposed a solution for remote operations via communication networks in the presence of communication unreliability. The primary challenges of remote operations over communication networks are high data packet rates and system stability, addressed through a combined approach in this framework. It integrates power-based passivity in the time domain with perceptual dead-band tactile data reduction methods to facilitate remote operations over communication networks. They introduced TDPA-ER (Time-Domain Passivity Approach with Energy Reflection), which uses adaptive damping at both ends to dissipate excess output energy, ensuring passivity in delayed communication channels. It treats the slave controller as an energy storage element, storing input energy from both sides and setting an upper limit for desired energy output.
Benzi et al. [117] proposed an energy-based control architecture for shared autonomy in robotics. Their approach uses TDPA to monitor system energy flow and activate variable dampers to dissipate excess energy from non-passive behavior. It incorporates energy tanks as passive filters, allowing passive reproduction of desired inputs without requiring system models.
Rad et al. [118] developed an adaptive energy reference TDPA control for tactile interfaces. This method mitigates sudden force changes in unknown environments by updating the energy reference at each sampling time, closely tracking the system’s actual energy level. It uses force and velocity data to learn energy references for each interaction, adapting to various environments and time delays. While the algorithm offers intuitive energy control, its “distributed” nature may reduce transparency, and delay impacts require further investigation.
3.3.7 Neural Network-Based Teleoperation Algorithm
Neural Network-Based algorithms [119–123] utilize neural networks to model and compensate for time delay effects in bilateral teleoperation systems. These algorithms employ machine learning to comprehend complex dynamics and delay characteristics from operational data. The neural network predicts delay impacts on system states and control signals, generating compensating actions to counteract destabilizing effects. The structural diversity of these algorithms stems from variations in neural network types, control frameworks, and adaptation mechanisms [124,125]. Fig. 16 shows two neural network structures commonly used in bilateral control systems.
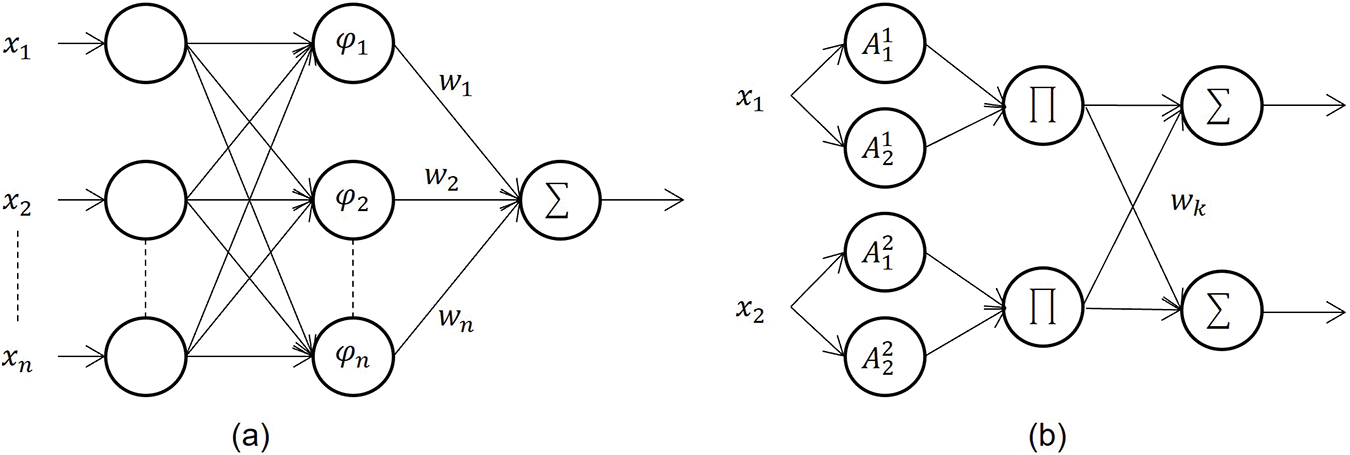
Figure 16: Structure of a typical neural network. (a) Radial basis function neural network; (b) Fuzzy neural network
Chen et al. [126] developed a control design for nonlinear bilateral teleoperation manipulators using Radial Basis Function (RBF) neural networks as shown in Fig. 17. This approach addresses communication delays, nonlinearity, and uncertainty.
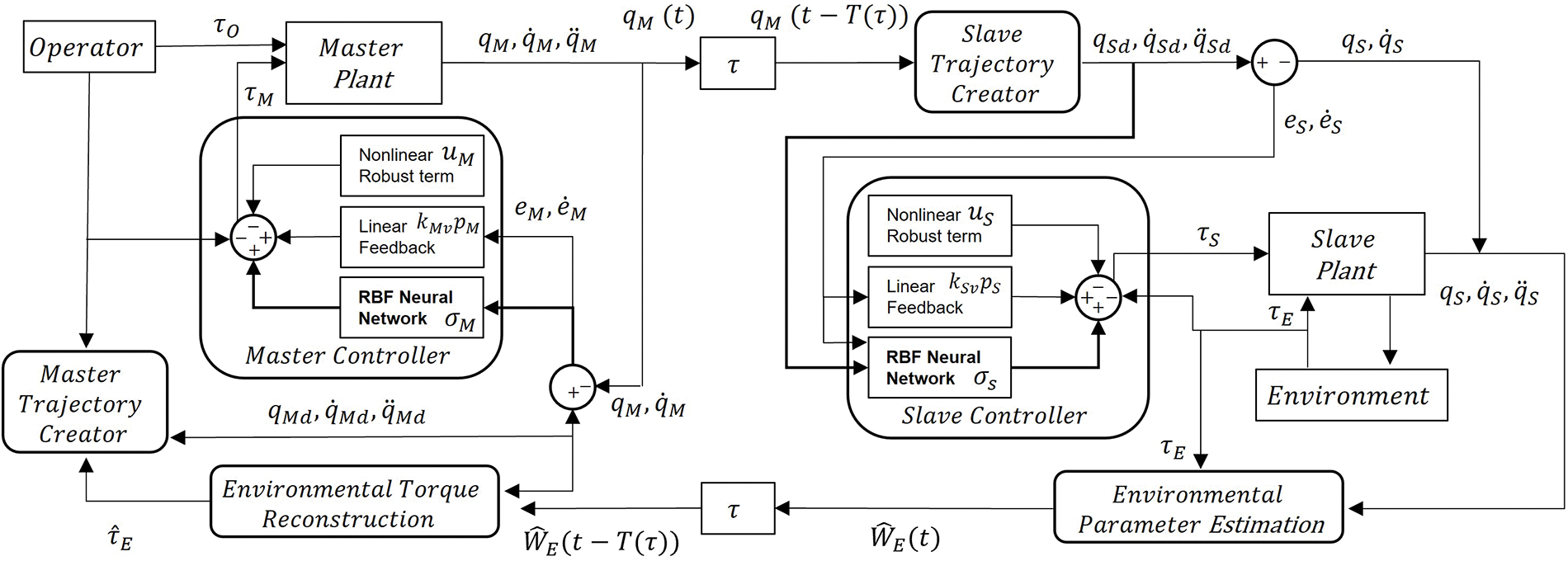
Figure 17: RBF-neural-network-based adaptive robust control scheme
The RBF-neural-network-based method’s core components are as follows:
The slave-side environmental dynamics are modeled using an RBF neural network, as shown in Eq. (26):
where
The environmental parameters
At the master side, the environmental torque is reconstructed using Eq. (27):
where
RBF neural networks estimate the nonlinear dynamics of both manipulators, which are defined as Eqs. (28) and (29):
where
The RBF neural network parameters are updated online using Eqs. (30) and (31):
where
The control laws incorporate the RBF neural network outputs, as Eqs. (32) and (33):
where
By modeling slave environment dynamics with a universal RBF neural network, the system achieves improved transparency and tracking performance. It bypasses passivity issues in traditional power signal transmission systems by transmitting estimated non-power environmental parameters, ensuring realistic environmental torque reconstruction and maintaining stability despite time-varying delays.
Yuan et al. [127] proposed an adaptive neural network architecture for delayed constrained bilateral teleoperation systems, achieving full-state constraint satisfaction. The design incorporates a cot-type barrier Lyapunov function (BLF) for stability analysis and radial basis function neural networks (RBFNN) to estimate dynamic parameter uncertainties, enhancing robustness while maintaining system stability and tracking performance.
Li et al. [128] introduced an adaptive fuzzy neural network (FNN) backstepping control scheme for bilateral teleoperation systems with asymmetric delays and uncertainties. This asymmetric structure employs velocity-based parameters at the master side to reduce trajectory error convergence time. The scheme incorporates FNN and adaptive laws in both master and slave controllers, estimating uncertainties like joint friction and gravity compensation while updating FNN weights to minimize position tracking errors and enhance transparency.
The key advantage of these neural network-based approaches is their adaptive handling of unknown and time-varying delays without explicit dynamics modeling. By learning from operational data, they capture complex non-linear relationships and disturbances, enhancing system robustness and transparency across diverse communication environments.
There are many applications of bilateral teleoperation robots, such as nuclear operations, transportation, space and deep-water exploration, minimally invasive or telemedicine surgery, etc. Human operators can do some tasks that were previously difficult or dangerous without contact with dangerous environments, and in the medical field, mechanical injuries in patient treatment can be alleviated and medical services can be remotely shared by force feedback bilateral remote operation robot [129–132]. This chapter will introduce classic application cases and research progress in various fields.
Force feedback in bilateral teleoperation robots has many important applications in the field of nuclear operations and strong radiation environment exploration. Robots can work in the strongly radioactive area of nuclear fusion reactors. Since the occurrence of the nuclear power plant accident in Japan in 2011, teleoperated robots have been continuously employed to perform tasks in high-radiation areas. Among these robots, the Quince robot [133] and the PackBot robot [134] have been utilized to measure radiation doses, transmit on-site images, and detect physical quantities such as environmental temperature, humidity, and oxygen concentration in the vicinity of the Fukushima nuclear power plant. Fig. 18 illustrates the appearance of these two robots.
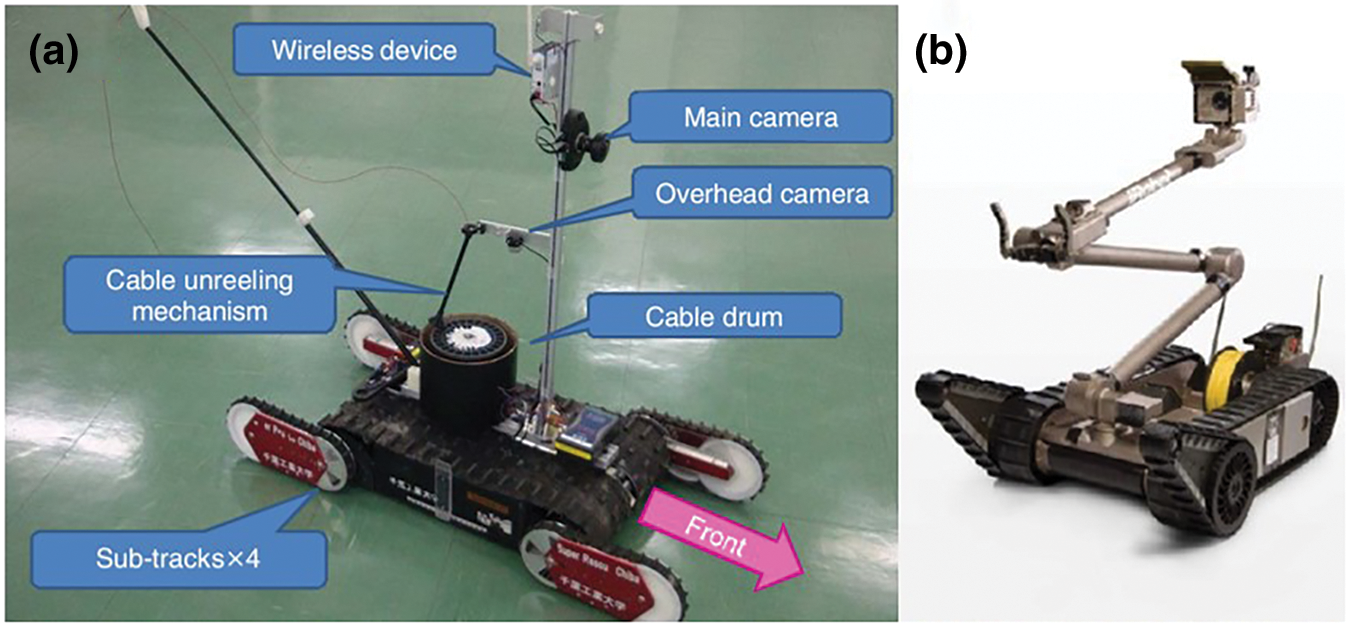
Figure 18: (a) Quince robot; (b) Packbot robot. Image Source: Zhang et al. [133]. Research Progress of Nuclear Emergency Response Robot. IOP Conference Series: Materials Science and Engineering, 452(4), 042102. https://doi.org/10.1088/1757-899X/452/4/042102, CC BY 3.0
The success of the Quince and PackBot robots in the Fukushima nuclear power plant disaster has not only demonstrated the effectiveness of teleoperated systems in hazardous environments but has also sparked a growing interest in advancing bilateral remote-control technology for high-radiation applications. Bilateral teleoperation allows for a more intuitive and immersive control experience, enabling the operator to receive haptic feedback from the remote device while controlling the robot’s actions. However, the development of bilateral teleoperation systems for high-radiation applications presents unique challenges, such as ensuring the robustness and reliability of the communication processes, mitigating the effects of time delays, and maintaining the haptic feedback system’s stability and transparency.
To solve the above problems, Kallu et al. [135] offered a development scheme for a bilateral remote operation system for the emergency dismantling of nuclear power plants (NPPs) in their study. Bilateral control is crucial for improving the robotic systems used in the dismantling process of NPPs. It allows for real-time feedback and interaction between operators and the remote environment. By employing bilateral control, the slave system ensures accurate tracking of commands from the master device, providing operators with a realistic sense of reactive force. This enhances operators’ perception of the working environment, facilitating efficient and safe dismantling operations. In the context of hydraulic manipulators used in nuclear dismantling, sliding mode control with sliding mode disturbance observer (SMCSPO) has been employed for sensorless force feedback in bilateral control. This method estimates the reactive force of the slave manipulator without using any sensors and applies it to the teleoperation of hydraulic manipulators in a bilateral control setup.
Pruks et al. [136] discussed the concept of shared remote operation of robots in nuclear power plants using shared autonomy and interactive virtual guidance methods. They propose a framework that leverages the cognitive abilities of human operators to enhance efficiency and reduce cognitive workload in remote operation tasks. This framework comprises shared remote operation and virtual guidance generation. The sketching approach allows operators to observe the remote environment and draw paths on images to convey their intentions to autonomous controllers, thus enabling intent communication in shared remote operations. Subsequently, autonomous controllers use the input paths drawn to plan trajectories, and a potential field-based shared controller ensures avoidance of obstacles during robot motion. Operators can interrupt again and sketch to update the desired movements. Using the virtual fixtures generated with the proposed method for remote operations can shorten execution time, improve accuracy, and enhance the safety of task execution.
The advantages of dual-arm teleoperation systems in nuclear and high-radiation environments are evident: they provide a safe, precise, and reliable method for operators to remotely control equipment or perform tasks without direct exposure to hazardous radiation environments. This remote operation system ensures the health and safety of personnel while maintaining the efficiency and accuracy of tasks, providing vital support and assurance for the nuclear industry and other high-radiation work environments [137].
Force feedback bilateral teleoperation systems have many important applications in space exploration. The SSRMS (Space Station Remote Manipulator System) [138] teleoperated robot, also known as Canadarm2, has been a critical component of the International Space Station since its installation in 2001, as shown in Fig. 19.
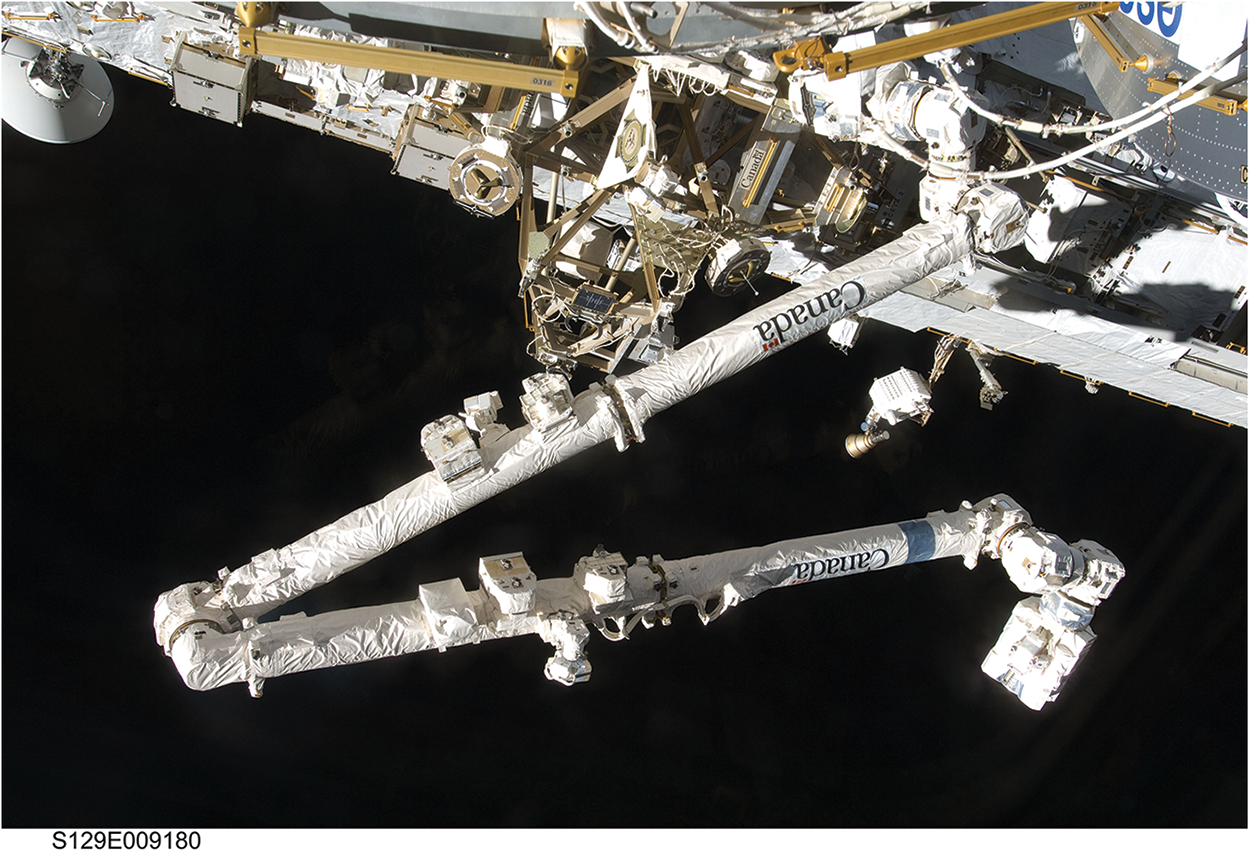
Figure 19: SSRMS remote operating system. Image Source: NASA Johnson Space Center (25 November 2009). The Canadian-built SSRMS or Canadarm2 during undocking activities between the International Space Station and the space shuttle Atlantis, from which the photo was taken. Flickr. https://www.flickr.com/photos/nasa2explore/9401553873 (accessed 20 October 2024), CC BY-NC 2.0
This sophisticated robotic system allows astronauts to perform a wide range of tasks, such as assembling and maintaining the space station, capturing and berthing visiting spacecraft, and supporting spacewalks. Moreover, the experience with the SSRMS has shaped the direction of future research, focusing on more precise force feedback control and methods to reduce delays.
In the field of tactile feedback, Schiele et al. [139] discussed the Haptics-2 experiment conducted by the European Space Agency (ESA), aimed at validating the concept of remote robot control in space. The primary objective of the Haptics-2 experiment was to enable tactile interaction between humans in space and on the ground. The experiment utilized a haptic manipulator as the primary hardware interface. Configured as “master control,” the manipulator measured and controlled joint positions and torques at high resolution. It was connected to a touchscreen tablet computer onboard the International Space Station (ISS), serving as the experiment’s primary graphical user interface (GUI). A ground-based tablet computer received telemetry and remote-control commands from the space unit, enabling ground personnel to monitor the experiment in real-time. The experiment demonstrated the feasibility of tactile communication between astronauts aboard the ISS and ground operators.
In low latency, Panzirsch et al. [140] discussed the feasibility and performance of remote operations with a delay of 3 s, similar to the delay caused by the communication process between the Moon and the Earth. They proposed a solution to reduce position drift during free movement state while maintaining the security and stability of interacting with the remote environment from the device. The proposed solution involves maintaining energy dissipation during contact periods through an admittance-type passive controller to reduce position drift in remote operations, ensuring that forces are applied to the slave device only when the operator senses contact and authorizes interaction. This approach enables safe interaction during accidental collisions and addresses permanent position drift that occurs when the master device leads the slave device. Additionally, the proposed method adjusts the master velocity based on measured force feedback to mitigate position drift during free motion. The use of dead zones for the measured wrench helps mitigate the sensor noise-caused negative effects.
In the field of space exploration, force feedback bilateral teleoperation enables the remote operation of space probes, robots, or spacecraft, avoiding direct exposure of personnel to the extreme hazards of space and enhancing the safety and reliability of missions. This technology not only improves the efficiency of mission execution and reduces resource consumption but also finds applications in various scenarios such as satellite maintenance, space station construction, and maintenance [141]. Future research directions will focus on enhancing the autonomy and intelligence of systems to cope with the complex and dynamic space environment, thereby providing more efficient and precise operational capabilities.
In the field of deep-sea exploration, force feedback bilateral teleoperation holds significant importance and application value. Through this technology, operators can remotely control underwater probes, robots, or submersibles from the ground or ships, enabling various tasks such as scientific research, resource exploration, and underwater infrastructure maintenance [142]. Fig. 20 shows the appearance of teleoperated robots used for deep-sea exploration [143–145].
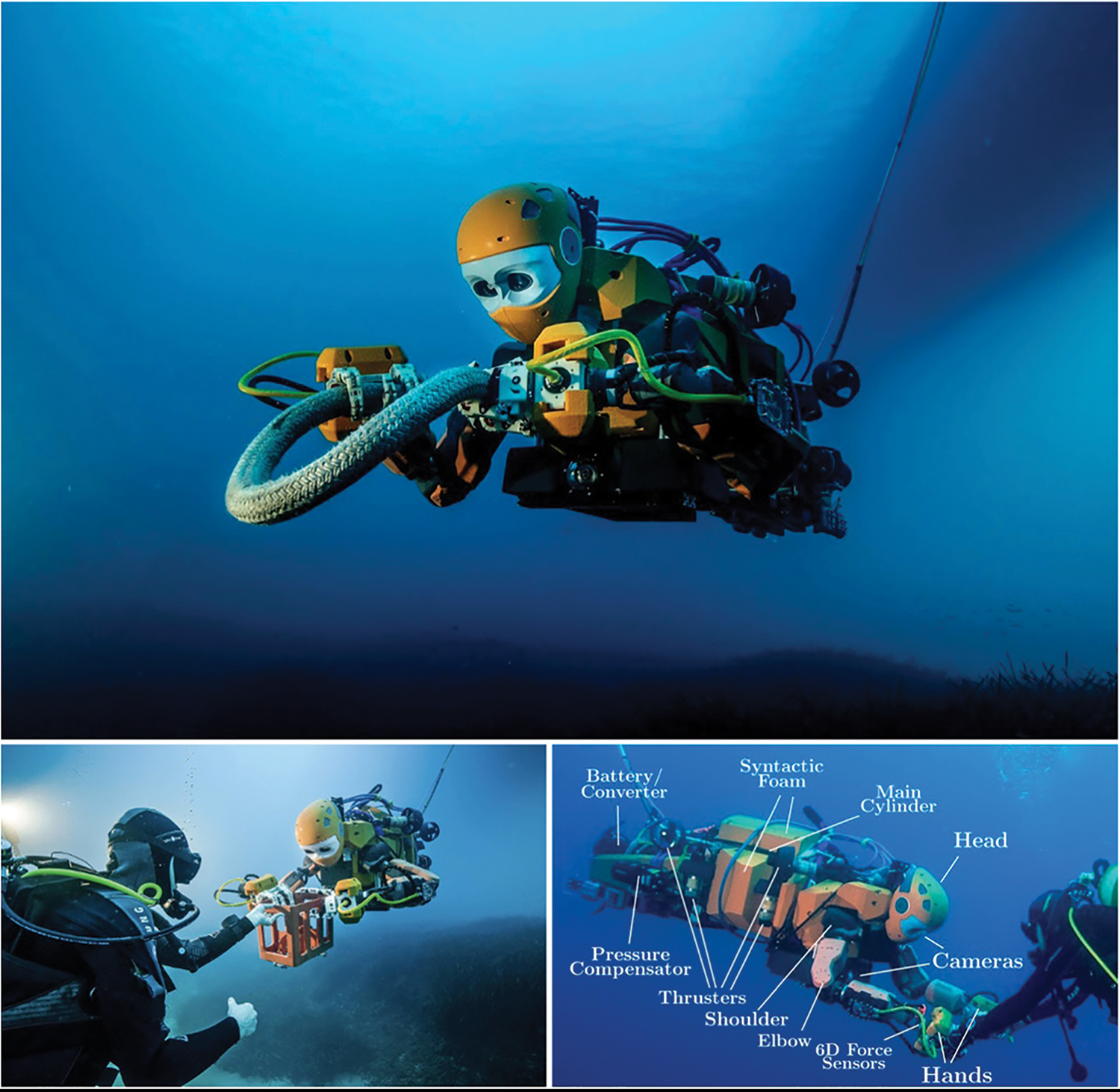
Figure 20: Ocean one robot [144]. Reprinted with permission from Brantner G, Khatib O, Controlling Ocean One: Human-robot collaboration for deep-sea manipulation, Journal of Field Robotics, Vol. 38, Issue 1, Copyright 2020 John Wiley and Sons
Fig. 20 shows the system components of the Ocean One robot. Ocean One robot developed at the Stanford AI/Robotics Laboratory, and the entire mechanical system can operate under deep-sea conditions, comparable to human technical divers.
With the development of this field, a variety of solutions have emerged for the teleoperation of robots in underwater conditions. Researchers and engineers have been exploring different approaches to tackle the unique challenges posed by the underwater domain, such as limited communication bandwidth, high latency, and the need for robust and reliable systems that can withstand the harsh conditions of the deep sea.
The DexROV project, funded by EC Horizon 2020 [146], focuses on developing new service capabilities for underwater operations. DexROV has developed a highly dexterous robotic arm and manipulator to meet the requirements of deep-sea operations. The arm will feature a redundant anthropomorphic kinematic design to achieve precise end-effector positioning. The incorporation of compact and precise force sensors in the robotic arm and fingers facilitates the implementation of sophisticated control algorithms that leverage force perception. This integration enhances the system’s ability to interact with its environment more sensitively and responsively. This device will include a wearable exoskeleton glove with three fingers capable of flexing, extending, and abducting.
Motoi et al. [147] offered a bilateral control method for underwater operations using a modular structure robotic arm. The modular structure of the robotic arm contributes to its waterproof design, utilizing magnetic couplers to realize the transmission of motor torque from the motor side to the load side using magnetic force. This allows for waterproofing of the robotic arm as motor torque can be transmitted without the need for physical connections, which could compromise waterproofing. The modular structure comprises motors, encoders, magnetic couplers, and gears. Waterproofing is achieved through magnetic coupling, ensuring the effective operation of the robotic arm in underwater environments.
Force feedback bilateral teleoperation technology provides real-time force feedback information, enabling operators to perceive and adapt to the mechanical characteristics of underwater environments, thus allowing for more precise operation of equipment [148]. Future research directions will include increasing the autonomy level of teleoperation systems, enhancing perceptual capabilities, and improving the precision and real-time performance of force feedback systems to address the complexity of deepwater environments and improve the efficiency and reliability of task execution.
Force feedback bilateral teleoperation has found significant applications in medical surgery, exemplified by the ‘da Vinci Surgical System’ [149,150]. This system utilizes a scaled teleoperation approach, as depicted in Fig. 21. The da Vinci system enables doctors to perform minimally invasive surgeries with enhanced precision, combining scaled teleoperation with high-definition medical imaging sensors.
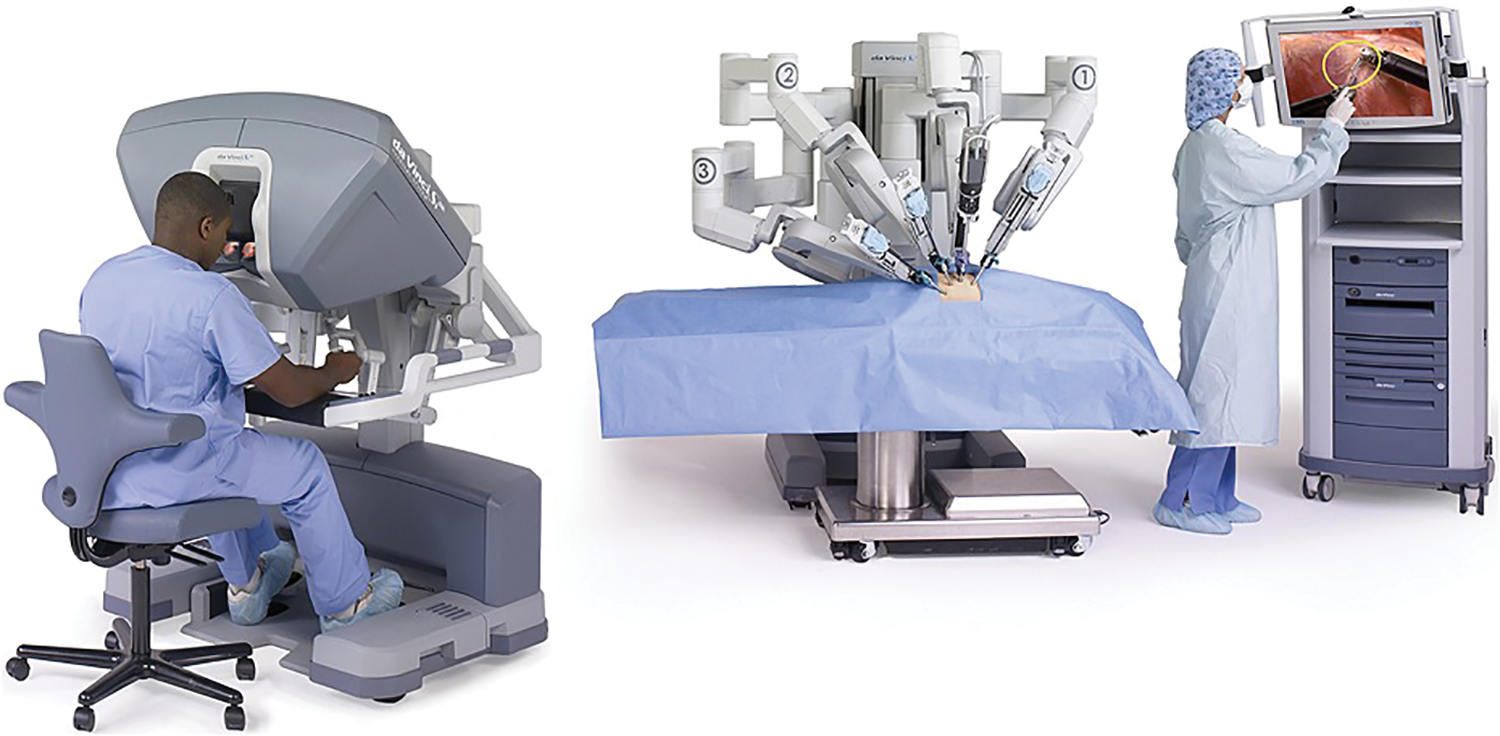
Figure 21: “Da Vinci” surgical robot system [151]. The da Vinci surgical robot. Reprinted with permission from International Journal of Medical Robotics and Computer Assisted Surgery, Vol. 9, Issue 4, Freschi C, Ferrari V, Melfi F, Ferrari M, Mosca F, Cuschieri A, Technical review of the da Vinci surgical telemanipulator, Copyright 2012 John Wiley and Sons
The da Vinci system integrates three primary components: a surgeon’s control console, a robotic cart positioned beside the patient, and an advanced imaging system. From the console, the surgeon manipulates master controls that direct the robotic arms, while simultaneously observing a high-definition, stereoscopic view of the operative field provided by the imaging system. This configuration enables the translation of the surgeon’s hand motions into precise, scaled movements of the surgical instruments within the patient. The system’s scaling capability can be fine-tuned, allowing surgeons to execute complex and delicate procedures with unprecedented precision and control, enhancing their ability to perform intricate maneuvers in confined spaces.
The success of the da Vinci system has spurred further research and development in the field of surgical robotics and teleoperation. Researchers are exploring new ways to enhance the system’s capabilities, such as incorporating tactile sensing, improving the ergonomics of the surgeon’s console, and developing more advanced control algorithms for autonomous and semi-autonomous surgical tasks. Yilmaz et al. [152] have developed a framework for optimizing tactile teleoperation transparency on the da Vinci Research Kit (dVRK) surgical robot without sensors. This addresses limitations due to the lack of tactile feedback in the da Vinci surgical robot. The proposed framework utilizes existing actuator feedback to estimate forces and combines it with deep neural networks for dynamic identification. The framework realizes a four-channel teleoperation architecture, integrating disturbance observers on the patient-side manipulator (PSM) and the master tool manipulator (MTM), neural network-based dynamic identification and force estimation, and sensorless force estimation based on real-time learning. Compared to the classical da Vinci operation framework, the proposed framework offers higher transparency and more accurate force feedback.
The introduction of force-sensing technology in the da Vinci 5 system represents a significant advancement in console-based robotic surgery. This feature, which allows surgeons to feel subtle forces exerted on tissue during procedures, addresses a longstanding limitation of robotic systems. The preclinical trials showing up to 43% less force exerted on tissue suggest potential benefits in terms of reduced tissue trauma. However, several considerations regarding the quality and practical implications of this technology warrant discussion. In the case of remote surgery, when a patient is in urgent need of surgery but is far away from the treating physician, or the patient’s condition prevents the patient from moving, the remote teleoperation surgical system can be used to perform timely surgical treatment on these patients [153]. In the process of remote surgical treatment, improving the realism and transparency of doctors’ control, thereby improving the accuracy of remote operations, is a problem that current scientific research is committed to solving [154–158].
However, non-console robotic systems, particularly handheld devices (HR), have demonstrated significant benefits in certain surgical contexts. A study by Gumbs et al. revealed a notably higher rate of minimally invasive completions in liver resections using handheld robotics compared to complete robotic (CR) systems (92.5% vs. 34.2%) [159]. This striking difference may be attributed to the preservation of haptic feedback and the ability to employ hand-assisted techniques in HR procedures. The advantages of HR devices are multifaceted, offering a more cost-effective solution compared to large console systems, providing surgeons with direct tactile feedback, and potentially having a shorter learning curve due to their similarity to traditional laparoscopic tools. Moreover, HR systems maintain the surgeon’s direct engagement with the operative field, potentially enhancing situational awareness.
The success of emerging console systems like the SSInnovations Mantra robot in performing remote surgeries indicates that such systems are indeed capable of bridging the distance gap in remote procedures. Recent clinical experience with the Mantra™ Multi Arm Surgical Robotic System in urological surgeries has demonstrated its versatility and efficiency across a range of complex procedures [160]. However, this does not necessarily imply that surgeons should exclusively use console systems for non-remote surgeries as preparation for remote procedures, as such an approach may overlook the potential benefits of non-console systems in routine surgical practice.
A more balanced perspective involves continued research into both console and non-console systems to optimize their respective strengths and mitigate limitations. This includes the development of hybrid systems that incorporate the benefits of both approaches, such as enhanced haptic feedback in console systems or improved visualization in handheld devices. Tailoring the choice of robotic system to the specific requirements of each procedure, considering factors such as the need for remote capabilities, the complexity of the surgery, and the importance of direct tactile feedback, is crucial.
5 Limitations and Future Directions
5.1 Current Challenges and Limitations
Despite the significant advancements in force feedback bilateral teleoperation systems, several technical challenges and limitations continue to hinder their widespread adoption and optimal performance. These challenges span various aspects of system design, control, and implementation, reflecting the complex nature of teleoperation technology.
One of the most persistent challenges in bilateral teleoperation is the compensation for time delays in communication channels. This issue becomes particularly critical in long-distance operations, where delays can significantly impact system stability and transparency. The fundamental trade-off between maintaining system stability and preserving haptic fidelity under variable time delays remains a key area of research. Engineers must continually balance passivity enforcement with the need for high transparency, often resulting in compromises that affect overall system performance.
Achieving high-fidelity haptic rendering that accurately represents the remote environment is another significant hurdle. Current haptic devices often struggle to match the bandwidth and resolution of human tactile perception. This limitation is compounded by quantization effects in force sensors and the inherent mismatch between human sensory capabilities and the performance envelope of haptic interfaces. As a result, operators may experience reduced tactile immersion, potentially impacting task performance and decision-making in critical applications.
The optimization of control architectures presents a multifaceted challenge in teleoperation systems. Designers must create control strategies that simultaneously ensure stability, maintain transparency, and deliver high performance across a wide range of operating conditions. This involves developing robust adaptive control methods capable of handling uncertain environments, implementing optimal gain scheduling for varying contact situations, and integrating hybrid position/force control strategies. The complexity of these requirements often leads to intricate control systems that can be difficult to tune and maintain.
Kinematic and dynamic discrepancies between master and slave manipulators introduce another layer of complexity. In many applications, the master and slave systems have different physical properties, workspace dimensions, and dynamic characteristics. Addressing these disparities requires sophisticated scaling and mapping algorithms to translate operator movements accurately. Moreover, compensating for differences in inertial properties and managing workspace limitations without introducing singularities remains an ongoing challenge, particularly in applications requiring high precision and dexterity.
The modeling and rendering of complex environmental interactions continue to pose significant difficulties, especially in specialized fields such as robotic surgery or industrial maintenance. Accurately simulating the behavior of soft tissues, handling variable stiffness environments, and managing multi-point contact scenarios in dexterous manipulation tasks push the boundaries of current modeling techniques. These challenges are further exacerbated by the need for real-time performance, often requiring trade-offs between model fidelity and computational efficiency.
Integrating and fusing data from multiple sensor modalities presents its own set of challenges. Optimal fusion of vision, force, and tactile data is crucial for accurate state estimation and enhanced force feedback. However, processing high-bandwidth sensor data in real time while dealing with noisy and incomplete information requires sophisticated filtering and estimation techniques. The development of efficient algorithms for sensor fusion that can operate within the strict timing constraints of teleoperation systems remains an active area of research.
Limitations in actuator technology also constrain the performance of force feedback systems. Current actuators often struggle to provide the desired combination of force output, bandwidth, and compact form factor. Engineers face a constant trade-off between force magnitude and bandwidth, particularly in applications requiring high-fidelity haptic feedback. The miniaturization of high-performance actuators while managing power consumption and heat dissipation adds another layer of complexity to system design.
These challenges collectively contribute to the fundamental stability-transparency trade-off that lies at the heart of force feedback teleoperation. Quantifying and optimizing this relationship, developing objective metrics for system performance evaluation, and creating adaptive methods for real-time stability-transparency optimization remain central focuses of ongoing research efforts. As the field continues to evolve, addressing these interconnected challenges will be crucial for realizing the full potential of force feedback bilateral teleoperation across a wide range of applications.
5.2 Future Perspectives and Research Directions
The research on force feedback bilateral teleoperation systems is a multidisciplinary challenge, encompassing control science, robotics, mechanical design, perceptual theory, and computer science [161–163]. As this technology continues to evolve, it demands a multidisciplinary approach, integrating control science, robotics, mechanical design, perceptual theory, and computer science. This convergence of disciplines is essential to address the complex challenges inherent in developing more sophisticated and efficient teleoperation systems.
Future research in this domain will likely focus on several interconnected areas. Hardware advancements, particularly in control-level components, will be crucial. While significant progress has been made in operational elements such as robotic arms, the next frontier lies in developing more advanced computer chips and processors specifically tailored for teleoperation applications. These advancements should aim to enhance the precision and responsiveness of haptic feedback devices while also focusing on the miniaturization of components to create more compact and versatile systems.
In parallel with hardware developments, software control strategies will play a pivotal role in the future of teleoperation. The ongoing challenge of balancing stability and transparency in control systems remains a key area for innovation. Researchers will need to develop adaptive control algorithms that can dynamically optimize this trade-off, ensuring robust performance across various operational conditions. Novel control architectures that can simultaneously enhance both stability and transparency will be particularly valuable in advancing the field.
The medical sector presents a unique and promising testbed for bilateral teleoperation systems. Unlike the extreme environments encountered in space exploration or deep-sea operations, medical applications typically offer more controlled settings, allowing for focused development with shorter iteration cycles. This domain is likely to see rapid advancements in integrating haptic, visual, and virtual reality technologies for more immersive and precise minimally invasive surgeries. The development of intelligent teleoperated medical robots for remote diagnosis and treatment could revolutionize healthcare delivery, particularly in underserved or remote areas [164–166].
The integration of virtual reality and artificial intelligence with force feedback systems holds immense potential. AI could significantly enhance force feedback accuracy and system adaptability, while Virtual Reality (VR) interfaces could provide more intuitive and effective control for operators. Research in this area should explore how machine learning algorithms can be employed for real-time environment modeling and force prediction, further improving the performance and capabilities of teleoperation systems.
Emerging technologies such as cloud computing and 5G communication are poised to play a transformative role in teleoperation. These advancements could dramatically reduce latency in long-distance operations, enable more complex, data-intensive applications, and facilitate the broader adoption of telemedicine and remote maintenance solutions. Investigating how these technologies can be optimally leveraged will be crucial for expanding the scope and effectiveness of teleoperation systems.
Human-machine interaction remains a critical area for future research in force feedback bilateral teleoperation systems. Developing more intuitive and ergonomic interfaces for prolonged teleoperation sessions is crucial for enhancing operator comfort and efficiency. This includes exploring novel haptic devices and input methods that leverage natural human movements while minimizing fatigue. Cognitive load reduction techniques for complex tasks are essential, potentially involving intelligent assistance systems that can predict operator intentions and provide contextual support. Enhancing operator training methodologies using VR and AI offers exciting possibilities for creating realistic simulation environments and personalized learning experiences. Additionally, advancements in multi-sensor fusion will be essential for creating more sophisticated environmental awareness in teleoperation systems. Research should focus on optimally combining data from visual, auditory, and tactile sensors, while also exploring novel sensor types to enhance environmental perception. Developing real-time fusion algorithms that can adapt to changing conditions is crucial, potentially leveraging machine learning techniques to improve accuracy across various operational scenarios. Furthermore, incorporating emotional intelligence into teleoperation interfaces could significantly enhance user experience, with systems potentially recognizing and responding to operator stress levels. As these technologies advance, exploring cross-modal sensory substitution and collaborative control paradigms may open new possibilities for enhanced perception and multi-user operations in complex environments. These advancements will not only improve the efficacy and usability of force feedback bilateral teleoperation systems but also expand their applications across various fields, from healthcare and disaster response to space exploration and industrial applications.
As teleoperation technology advances, addressing ethical and social implications becomes increasingly important. Future research must consider privacy and security concerns, especially in sensitive applications like healthcare. The societal impact of widespread teleoperation technology adoption and the development of appropriate regulatory frameworks to ensure safe and ethical use are also crucial areas that demand attention.
It is important to note that the terminology of ‘master’ and ‘slave’ components in robotic and teleoperation systems, while historically used, is problematic due to its association with human slavery and oppression. This language is unacceptable and should be changed, following similar shifts in other industries to more neutral terms [167].
The word ‘robot’ itself originates from the Czech word for ‘slave’ or ‘servant’, reflecting outdated notions of human-machine relationships that we should move beyond. While some argue the terms are purely technical in robotics contexts, they nonetheless carry weighty historical and social connotations that can perpetuate harmful attitudes. As the field of artificial intelligence surgery advances, we have an opportunity and responsibility to adopt more inclusive and neutral language. Possible alternatives include ‘primary and secondary’, ‘control and peripheral’, or simply ‘device A and device B’ when referring to different components of teleoperation systems. The specific terminology may vary based on the exact application, but the key is moving away from the master-slave dichotomy [168].
This review has examined the evolution and current state of force feedback bilateral teleoperation systems through systematic analysis of research literature and technological developments. The bibliometric analysis covering 2011 to 2024 revealed significant growth in research activity, demonstrating the field’s expanding academic importance. The systematic examination of control structures and algorithms uncovered the persistent fundamental trade-off between stability and transparency in system design. Traditional approaches such as position-position and force-position control structures demonstrated distinct advantages in implementation simplicity and performance characteristics. The four-channel control structure emerged as a theoretically complete solution for achieving ideal transparency, though practical implementation challenges were identified. The analysis of control algorithms, ranging from wave variables to neural network-based approaches, revealed an evolution toward more sophisticated solutions for handling time delays and system uncertainties.
Our investigation of practical applications across nuclear operations, space exploration, deep-water expeditions, and medical surgery demonstrated both the versatility and specific challenges of force feedback bilateral teleoperation. Each domain exhibited unique requirements driving specific technological adaptations. The medical field, particularly surgical applications, proved to be a crucial testing ground for advancing teleoperation technology, with developments in systems like the da Vinci platform illustrating both the achievements and limitations of current approaches. The analysis revealed persistent technical challenges in several key areas. Time delay compensation continues to present significant difficulties, particularly in long-distance operations. Haptic rendering fidelity remains limited by current hardware capabilities and control methodologies. The optimization of control architectures faces ongoing challenges in balancing multiple performance requirements. These technical limitations are particularly evident in applications requiring high precision and reliability, such as surgical procedures and hazardous environment operations.
This review has demonstrated that force feedback bilateral teleoperation represents a significant advancement in human-machine interaction technology, enabling enhanced operator capability while ensuring safety in hazardous environments. We hope this systematic review of research trends, technical developments, and practical applications can serve as a helpful reference for researchers, practitioners, and students interested in force feedback bilateral teleoperation systems. The insights gathered here may assist both newcomers to the field in understanding fundamental concepts and experienced practitioners in identifying current challenges and potential research directions.
Acknowledgement: Authors thank the support of Research Supporting Project Number (RSPD2024R585), King Saud University, Riyadh, Saudi Arabia.
Funding Statement: This study was supported by the MSIT (Ministry of Science and ICT), Republic of Korea, under the Convergence Security Core Talent Training Business Support Program (IITP-2024-RS-2024-00423071) supervised by the IITP (Institute of Information & Communications Technology Planning & Evaluation); supported by Sichuan Science and Technology Program (2023YFSY0026, 2023YFH0004).
Author Contributions: Conception and design: Wenfeng Zheng, Lirong Yin; data processing: Yu Zhou, Ruiyang Wang, Siyu Lu; analysis and interpretation of results: Siyu Lu, Ruiyang Wang, Minyi Tang, Salman A. AlQahtani; draft manuscript preparation: Jiawei Tian, Yu Zhou, Minyi Tang, Ruiyang Wang, Siyu Lu; review and editing: Salman A. AlQahtani, Wenfeng Zheng, Lirong Yin; funding acquisition: Jiawei Tian, Salman A. AlQahtani, Wenfeng Zheng. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: All data generated or analyzed during this study are included in this published article.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Marincic A, Budimir D. Tesla’s multi-frequency wireless radio controlled vessel. In: 2008 IEEE History of Telecommunications Conference, 2008 Sep 11–12; Paris, France. [Google Scholar]
2. Hokayem PF, Spong MW. Bilateral teleoperation: an historical survey. Automatica. 2006;42(12):2035–57. doi:10.1016/j.automatica.2006.06.027. [Google Scholar] [CrossRef]
3. Lewis FL, Dawson DM, Abdallah CT. Robot manipulator control: theory and practice. Boca Raton: CRC Press; 2003. [Google Scholar]
4. Sun D, Naghdy F, Du H. Application of wave-variable control to bilateral teleoperation systems: a survey. Annu Rev Control. 2014;38(1):12–31. doi:10.1016/j.arcontrol.2014.03.002. [Google Scholar] [CrossRef]
5. Shimono T, Katsura S, Ohnishi K. Haptic motion control for physical human support. IEEJ Trans Electr Electron Eng. 2009;4(2):166–75. doi:10.1002/tee.v4:2. [Google Scholar] [CrossRef]
6. Muradore R, Fiorini P. A review of bilateral teleoperation algorithms. Acta Polytech Hungarica. 2016;13(1):191–208. [Google Scholar]
7. Ferretti G, Magnani G, Rocco P. Impedance control for elastic joints industrial manipulators. IEEE Trans Robot Automat. 2004;20(3):488–98. doi:10.1109/TRA.2004.825472. [Google Scholar] [CrossRef]
8. Puangmali P, Althoefer K, Seneviratne LD. Mathematical modeling of intensity-modulated bent-tip optical fiber displacement sensors. IEEE Trans Instrument Meas. 2009;59(2):283–91. doi:10.1109/TIM.2009.2023147. [Google Scholar] [CrossRef]
9. Suwanratchatamanee K, Matsumoto M, Hashimoto S. Haptic sensing foot system for humanoid robot and ground recognition with one-leg balance. IEEE Trans Ind Electron. 2009;58(8):3174–86. doi:10.1109/TIE.2009.2030217. [Google Scholar] [CrossRef]
10. Okamoto S, Konyo M, Maeno T, Tadokoro S. Remote tactile transmission with time delay for robotic master-slave systems. Adv Robot. 2011;25(9–10):1271–94. doi:10.1163/016918611X574713. [Google Scholar] [CrossRef]
11. Son HI, Franchi A, Chuang LL, Kim J, Bulthoff HH, Giordano PR. Human-centered design and evaluation of haptic cueing for teleoperation of multiple mobile robots. IEEE Trans Cybern. 2013;43(2):597–609. doi:10.1109/TSMCB.2012.2212884. [Google Scholar] [PubMed] [CrossRef]
12. Yoon SM, Kim WJ, Lee MC. Design of bilateral control for force feedback in surgical robot. Int J Control, Automat Syst. 2015;13(4):916–25. doi:10.1007/s12555-013-0542-6. [Google Scholar] [CrossRef]
13. Soyguder S, Abut T. Haptic industrial robot control with variable time delayed bilateral teleoperation. Ind Robot: Int J. 2016;43(4):390–402. doi:10.1108/IR-12-2015-0213. [Google Scholar] [CrossRef]
14. Wang Z, Hai M, Liu X, Pei Z, Qian S, Wang D. A human-robot interaction control strategy for teleoperation robot system under multi-scenario applications. Int J Intell Robot Appl. 2024;8:806–7. [Google Scholar]
15. Saini S, Orlando MF, Pathak PM. Intelligent control of a master-slave based robotic surgical system. J Intell Robot Syst. 2022;105(4):94. doi:10.1007/s10846-022-01684-3. [Google Scholar] [CrossRef]
16. Yang C, Wang X, Li Z, Li Y, Su CY. Teleoperation control based on combination of wave variable and neural networks. IEEE Trans Syst, Man, Cybern: Syst. 2017;47(8):2125–36. doi:10.1109/TSMC.2016.2615061. [Google Scholar] [CrossRef]
17. Li Z, Su CY. Neural-adaptive control of single-master-multiple-slaves teleoperation for coordinated multiple mobile manipulators with time-varying communication delays and input uncertainties. IEEE Trans Neural Netw Learn Syst. 2013;24(9):1400–13. doi:10.1109/TNNLS.2013.2258681. [Google Scholar] [PubMed] [CrossRef]
18. Cruz-Ortiz D, Chairez I, Poznyak A. Adaptive sliding-mode trajectory tracking control for state constraint master-slave manipulator systems. ISA Trans. 2022;127(6):273–82. doi:10.1016/j.isatra.2021.08.023. [Google Scholar] [PubMed] [CrossRef]
19. Linda O, Manic M. Self-organizing fuzzy haptic teleoperation of mobile robot using sparse sonar data. IEEE Trans Ind Electron. 2011;58(8):3187–95. doi:10.1109/TIE.2009.2037649. [Google Scholar] [CrossRef]
20. Li Z, Cao X, Ding N. Adaptive fuzzy control for synchronization of nonlinear teleoperators with stochastic time-varying communication delays. IEEE Trans Fuzzy Syst. 2011;19(4):745–57. doi:10.1109/TFUZZ.2011.2143417. [Google Scholar] [CrossRef]
21. Chen Z, Huang F, Yang C, Yao B. Adaptive fuzzy backstepping control for stable nonlinear bilateral teleoperation manipulators with enhanced transparency performance. IEEE Trans Ind Electron. 2020;67(1):746–56. doi:10.1109/TIE.2019.2898587. [Google Scholar] [CrossRef]
22. Hua C, Yang Y. Transparency performance improvement for bilateral teleoperation with direct force-feedback control. In: 2011 IEEE International Workshop on Haptic Audio Visual Environments and Games, 2011 Oct 14–17; Hebei, China. [Google Scholar]
23. McMahan W, Gewirtz J, Standish D, Martin P, Kunkel JA, Lilavois M, et al. Tool contact acceleration feedback for telerobotic surgery. IEEE Trans Haptics. 2011;4(3):210–20. doi:10.1109/TOH.2011.31. [Google Scholar] [PubMed] [CrossRef]
24. Sarakoglou I, Garcia-Hernandez N, Tsagarakis NG, Caldwell DG. A high performance tactile feedback display and its integration in teleoperation. IEEE Trans Haptics. 2012;5(3):252–63. doi:10.1109/TOH.2012.20. [Google Scholar] [PubMed] [CrossRef]
25. Moya V, Slawiñski E, Mut V. Delayed teleoperation with force feedback of a humanoid robot. Int J Automat Comput. 2021;18(4):605–18. doi:10.1007/s11633-020-1267-7. [Google Scholar] [CrossRef]
26. Daly JM, Wang DWL. Time-delayed output feedback bilateral teleoperation with force estimation for $n$-DOF nonlinear manipulators. IEEE Trans Control Syst Technol. 2014;22(1):299–306. doi:10.1109/TCST.2013.2242329. [Google Scholar] [CrossRef]
27. Farkhatdinov I, Ryu JH. Improving mobile robot bilateral teleoperation by introducing variable force feedback gain. In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010 Oct 18–22; Taipei, Taiwan. [Google Scholar]
28. Dong N, Hu J, Li J, Shi J, Tan L, Lin Y. A position-based impedance control strategy of bilateral teleoperation system with force feedback. In: 2021 China Automation Congress (CAC), 2021 Oct 22–24; Beijing, China. [Google Scholar]
29. Chioson FB, Espiritu NMD, Munsayac FET, Dajay RCR, Santos MBS, Baldovino RG, et al. Implementation of a bilateral teleoperation haptic feedback controls to robotic minimally invasive surgery. In: 2020 IEEE 12th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), 2020 Dec 3–7; Manila, Philippines. [Google Scholar]
30. Illanes A, Sühn T, Esmaeili N, Maldonado I, Schaufler A, Chen CH, et al. Surgical audio guidance SurAG: extracting non-invasively meaningful guidance information during minimally invasive procedures. In: 2019 IEEE 19th International Conference on Bioinformatics and Bioengineering (BIBE), 2019 Oct 28–30; Athens, Greece. [Google Scholar]
31. Liu N, Zhang Y, Wu M. Hybrid control of force feedback and position feedback for bilateral teleoperation of underwater manipulator. In: International Conference on Intelligent and Human-Computer Interaction Technology (IHCIT 2022), 2022 July 22–24; Zhuhai, China. [Google Scholar]
32. Nakajima Y, Nozaki T, Ohnishi K. Heartbeat synchronization with haptic feedback for telesurgical robot. IEEE Trans Ind Electron. 2014;61(7):3753–64. doi:10.1109/TIE.2013.2287258. [Google Scholar] [CrossRef]
33. Pacchierotti C, Prattichizzo D. Cutaneous/tactile haptic feedback in robotic teleoperation: motivation, survey, and perspectives. IEEE Trans Robot. 2024;40:978–98. doi:10.1109/TRO.2023.3344027. [Google Scholar] [CrossRef]
34. Bergholz M, Ferle M, Weber BM. The benefits of haptic feedback in robot assisted surgery and their moderators: a meta-analysis. Sci Rep. 2023;13(1):19215. doi:10.1038/s41598-023-46641-8. [Google Scholar] [PubMed] [CrossRef]
35. Gracia L, Solanes JE, Munoz-Benavent P, Miro JV, Perez-Vidal C, Tornero J. Adaptive sliding mode control for robotic surface treatment using force feedback. Mechatronics. 2018;52:102–18. doi:10.1016/j.mechatronics.2018.04.008. [Google Scholar] [CrossRef]
36. Cabibihan J-J, Alhaddad AY, Gulrez T, Yoon WJ. Influence of visual and haptic feedback on the detection of threshold forces in a surgical grasping task. IEEE Robot Automat Lett. 2021;6(3):5525–32. doi:10.1109/LRA.2021.3068934. [Google Scholar] [CrossRef]
37. Duan T, Punpongsanon P, Jia S, Iwai D, Sato K, Plataniotis KN. Remote environment exploration with drone agent and haptic force feedback. In: 2019 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR), 2019 Dec 9–11; San Diego, CA, USA. [Google Scholar]
38. Liu GY, Geng XD, Liu LZ, Yan W. Haptic based teleoperation with master-slave motion mapping and haptic rendering for space exploration. Chin J Aeronaut. 2019;32(3):723–36. doi:10.1016/j.cja.2018.07.009. [Google Scholar] [CrossRef]
39. Schorr SB, Okamura AM. Three-dimensional skin deformation as force substitution: wearable device design and performance during haptic exploration of virtual environments. IEEE Trans Haptics. 2017;10(3):418–30. doi:10.1109/TOH.2017.2672969. [Google Scholar] [PubMed] [CrossRef]
40. Overtoom EM, Horeman T, Jansen F-W, Dankelman J, Schreuder HW. Haptic feedback, force feedback, and force-sensing in simulation training for laparoscopy: a systematic overview. J Surg Educ. 2019;76(1):242–61. doi:10.1016/j.jsurg.2018.06.008. [Google Scholar] [PubMed] [CrossRef]
41. Bahar L, Sharon Y, Nisky I. Surgeon-centered analysis of robot-assisted needle driving under different force feedback conditions. Front Neurorobot. 2020;13:108. doi:10.3389/fnbot.2019.00108. [Google Scholar] [PubMed] [CrossRef]
42. Guo S, Wang Y, Xiao N, Li Y, Jiang Y. Study on real-time force feedback for a master-slave interventional surgical robotic system. Biomed Microdev. 2018;20:1–10. [Google Scholar]
43. Patel RV, Atashzar SF, Tavakoli M. Haptic feedback and force-based teleoperation in surgical robotics. Proc IEEE. 2022;110(7):1012–27. doi:10.1109/JPROC.2022.3180052. [Google Scholar] [CrossRef]
44. Hooshiar A, Payami A, Dargahi J, Najarian S. Magnetostriction-based force feedback for robot-assisted cardiovascular surgery using smart magnetorheological elastomers. Mech Syst Signal Process. 2021;161:107918. doi:10.1016/j.ymssp.2021.107918. [Google Scholar] [CrossRef]
45. Takagi R, Osada K, Hanafusa A, Takagi M, Mohamaddan SB, Mitsui K, et al. Development of a remote-control system for catheterization capable of high-speed force feedback. Int J Comput Assist Radiol Surg. 2023;18(4):763–73. doi:10.1007/s11548-022-02815-9. [Google Scholar] [PubMed] [CrossRef]
46. Li T, Wang S, Li C, Qiu L, Lim CM, Ren H. A six-Axis FBG force/moment sensor with nonlinear decoupling and fault tolerance for laparoscopic instruments. IEEE Trans Ind Electron. 2024;71(10):13384–94. [Google Scholar]
47. Zhu Q, Du J, Shi Y, Wei P. Neurobehavioral assessment of force feedback simulation in industrial robotic teleoperation. Autom Constr. 2021;126(1):103674. doi:10.1016/j.autcon.2021.103674. [Google Scholar] [CrossRef]
48. Rangarajan K, Davis H, Pucher PH. Systematic review of virtual haptics in surgical simulation: a valid educational tool? J Surg Educ. 2020;77(2):337–47. doi:10.1016/j.jsurg.2019.09.006. [Google Scholar] [PubMed] [CrossRef]
49. Bugdadi A, Sawaya R, Bajunaid K, Olwi D, Winkler-Schwartz A, Ledwos N, et al. Is virtual reality surgical performance influenced by force feedback device utilized? J Surg Educ. 2019;76(1):262–73. doi:10.1016/j.jsurg.2018.06.012. [Google Scholar] [PubMed] [CrossRef]
50. Postema R, Hardon H, Rahimi AM, Horeman R, Nickel F, Dankelman J, et al. The value of collision feedback in robotic surgical skills training. Virtual Real. 2024;28(1):46. doi:10.1007/s10055-023-00891-z. [Google Scholar] [CrossRef]
51. Zhou T, Zhu Q, Du J. Intuitive robot teleoperation for civil engineering operations with virtual reality and deep learning scene reconstruction. Adv Eng Inform. 2020;46(1):101170. doi:10.1016/j.aei.2020.101170. [Google Scholar] [CrossRef]
52. Orlosky J, Theofilis K, Kiyokawa K, Nagai Y. Effects of throughput delay on perception of robot teleoperation and head control precision in remote monitoring tasks. PRESENCE: Virtual Augment Real. 2018;27(2):226–41. doi:10.1162/pres_a_00328. [Google Scholar] [CrossRef]
53. Wei D, Huang B, Li Q. Multi-view merging for robot teleoperation with virtual reality. IEEE Robot Automat Lett. 2021;6(4):8537–44. doi:10.1109/LRA.2021.3109348. [Google Scholar] [CrossRef]
54. González C, Solanes JE, Munoz A, Gracia L, Girbés-Juan V, Tornero J. Advanced teleoperation and control system for industrial robots based on augmented virtuality and haptic feedback. J Manufact Syst. 2021;59:283–98. doi:10.1016/j.jmsy.2021.02.013. [Google Scholar] [CrossRef]
55. Deng Y, Tang Y, Yang B, Zheng W, Liu S, Liu C. A review of bilateral teleoperation control strategies with soft environment. In: 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), 2021 Jul 3–5; Chongqing, China; IEEE. [Google Scholar]
56. Clark JP, Lentini G, Barontini F, Catalano MG, Bianchi M, O’Malley MK. On the role of wearable haptics for force feedback in teleimpedance control for dual-arm robotic teleoperation. In: 2019 International Conference on Robotics and Automation (ICRA), 2019 May 20–24; Montreal, QC, Canada; IEEE. [Google Scholar]
57. Ramos J, Kim S. Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation. Sci Robot. 2019;4(35):eaav4282. doi:10.1126/scirobotics.aav4282. [Google Scholar] [PubMed] [CrossRef]
58. Chicaiza FA, Slawiñski E, Salinas LR, Mut VA. Evaluation of path planning with force feedback for bilateral teleoperation of unmanned rotorcraft systems. J Intell Robot Syst. 2022;105(2):34. doi:10.1007/s10846-022-01651-y. [Google Scholar] [CrossRef]
59. Lawrence DA. Stability and transparency in bilateral teleoperation. IEEE Trans Robot Automat. 1993;9(5):624–37. doi:10.1109/70.258054. [Google Scholar] [CrossRef]
60. Polushin IG, Liu PX, Lung C-H, On GD. Position-error based schemes for bilateral teleoperation with time delay: theory and experiments. J Dyn Syst, Meas, Control. 2010;132(3):(031008-1)–(031008-11). [Google Scholar]
61. Deka SA, Stipanović DM, Kesavadas T. Stable bilateral teleoperation with bounded control. IEEE Trans Control Syst Technol. 2018;27(6):2351–60. [Google Scholar]
62. Mahmoud MS, Maaruf M. Prescribed performance output feedback synchronisation control of bilateral teleoperation system with actuator nonlinearities. Int J Syst Sci. 2021;52(15):3115–27. doi:10.1080/00207721.2021.1921308. [Google Scholar] [CrossRef]
63. Shahbazi M, Atashzar SF, Patel RV. A systematic review of multilateral teleoperation systems. IEEE Trans Haptics. 2018;11(3):338–56. doi:10.1109/TOH.2018.2818134. [Google Scholar] [PubMed] [CrossRef]
64. Saeedi S, Trentini M, Seto M, Li H. Multiple-robot simultaneous localization and mapping: a review. J Field Robot. 2016;33(1):3–46. doi:10.1002/rob.21620. [Google Scholar] [CrossRef]
65. Le M-Q, Pham MT, Tavakoli M, Moreau R. An enhanced sliding-mode control for a pneumatic-actuated teleoperation system. In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011 Sep 25–30; San Francisco, CA, USA; IEEE. [Google Scholar]
66. Li J, You B, Ding L, Xu J, Li W, Chen H, et al. A novel bilateral haptic teleoperation approach for hexapod robot walking and manipulating with legs. Robot Autonom Syst. 2018;108:1–12. doi:10.1016/j.robot.2018.06.001. [Google Scholar] [CrossRef]
67. Li W, Liu S, Ren D, Wang J, Gao H. Bilateral teleoperation of wheeled mobile robots subject to lateral sliding on soft terrains. In: 2020 39th Chinese Control Conference (CCC), 2020 Jul 27–29; Shenyang, China; IEEE. [Google Scholar]
68. Ahmed AI, Musa MH. A novel walking speed control strategy for power augmentation exoskeletons based on neural networks. FES J Eng Sci. 2019;8(2):104–13. [Google Scholar]
69. Caccamo S, Güler P, Kjellström H, Kragic D. Active perception and modeling of deformable surfaces using gaussian processes and position-based dynamics. In: 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), 2016 Nov 15–17; Cancun, Mexico; IEEE. [Google Scholar]
70. Abu-Dakka FJ, Saveriano M. Variable impedance control and learning—a review. Front Rob AI. Nov. 15–17, 2020;7:590681. doi:10.3389/frobt.2020.590681. [Google Scholar] [PubMed] [CrossRef]
71. Li Z, Zhang T, Huang P, Li G. Human-in-the-loop cooperative control of a walking exoskeleton for following time-variable human intention. IEEE Trans Cybern. 2022;54(4):2142–54. [Google Scholar]
72. Kim J, Seo C, Ryu J, Kim J-P. Enhancing rate-hardness of energy-bounding algorithm by considering coulomb friction of haptic interface. In: 2010 IEEE Haptics Symposium, 2010 Mar 25–26; Waltham, MA, USA; IEEE. [Google Scholar]
73. Chen Z, Huang F, Sun W, Song W. An improved wave-variable based four-channel control design in bilateral teleoperation system for time-delay compensation. IEEE Access. 2018;6:12848–57. doi:10.1109/ACCESS.2018.2805782. [Google Scholar] [CrossRef]
74. Chen Z, Huang F, Song W, Zhu S. A novel wave-variable based time-delay compensated four-channel control design for multilateral teleoperation system. IEEE Access. 2018;6:25506–16. doi:10.1109/ACCESS.2018.2829601. [Google Scholar] [CrossRef]
75. Hangai S, Nozaki T. Haptic data prediction and extrapolation for communication traffic reduction of four-channel bilateral control system. IEEE Trans Ind Inf. 2020;17(4):2611–20. doi:10.1109/TII.2020.2995627. [Google Scholar] [CrossRef]
76. Tang J, Huang F, Chen Z, Wang T, Gu J, Zhu S. Disturbance-observer-based sliding mode control design for nonlinear bilateral teleoperation system with four-channel architecture. IEEE Access. 2019;7:72672–83. doi:10.1109/ACCESS.2019.2920315. [Google Scholar] [CrossRef]
77. Hieno T, Yashiro D, Komada S, Hirai J. Stability and transparency of adaptive controller based four-channel bilateral control system with communication delay. In: 2014 IEEE 13th International Workshop on Advanced Motion Control (AMC), 2014 Mar 14–16; Yokohama, Japan; IEEE. [Google Scholar]
78. Sun D, Naghdy F, Du H. Transparent four-channel bilateral control architecture using modified wave variable controllers under time delays. Robotica. 2016;34(4):859–75. doi:10.1017/S026357471400191X. [Google Scholar] [CrossRef]
79. Chan L, Huang Q, Wang P. Adaptive-observer-based robust control for a time-delayed teleoperation system with scaled four-channel architecture. Robotica. 2022;40(5):1385–405. doi:10.1017/S0263574721001168. [Google Scholar] [CrossRef]
80. Srikar A, Kumar PV, Thondiyath A. Enhancement of stability and transparency in teleoperated robots through isotropy-based design. IEEE Access. 2020;8:17273–86. doi:10.1109/ACCESS.2020.2966769. [Google Scholar] [CrossRef]
81. Wang K, Gao Z, Peng F, Chen C, Tang X, Liu Z. Four-channel sliding mode control for haptic teleoperation system with disturbance in contact with adaptive stiffness environments. In: 2022 41st Chinese Control Conference (CCC), 2022 Jul 25–27; Hefei, China; IEEE. [Google Scholar]
82. Wang J, Tian J, Zhang X, Yang B, Liu S, Yin L, et al. Control of time delay force feedback teleoperation system with finite time convergence. Front Neurorobot. 2022;16:107. doi:10.3389/fnbot.2022.877069. [Google Scholar] [PubMed] [CrossRef]
83. Liu S, Wei X, Zheng W, Yang B. A four-channel time domain passivity approach for bilateral teleoperator. In: 2018 IEEE International Conference on Mechatronics and Automation (ICMA), 2018 Aug 5–8; Changchun, China. [Google Scholar]
84. Liu S, Zheng W, Yang B. Adaptive terminal sliding mode control for time-delay teleoperation with uncertainties. In: 2018 IEEE International Conference on Mechatronics and Automation (ICMA), 2018 Aug 5–8; Changchun, China. [Google Scholar]
85. Yasrebi N, Constantinescu D. Passive wave variable control of haptic interaction with an unknown virtual environment. In: 2011 IEEE International Conference on Robotics and Automation, 2011 May 9–13; Shanghai, China. [Google Scholar]
86. D’Amore N, Akin DL. Transparency and tuning of wave-based bilateral teleoperation systems. IEEE Robot Automat Lett. 2017;2(1):321–8. doi:10.1109/LRA.2016.2606659. [Google Scholar] [CrossRef]
87. Ferraguti F, Bonfè M, Fantuzzi C, Secchi C. Optimized power modulation in wave-based bilateral teleoperation. IEEE/ASME Trans Mechatron. 2020;26(1):276–87. [Google Scholar]
88. Huang F, Chen Z, Gu J. An enhanced wave-variable based four-channel bilateral teleoperation control design. In: 2018 IEEE 14th International Conference on Control and Automation (ICCA), 2018 Jun 12–15; Anchorage, AK, USA. [Google Scholar]
89. Tang W, Daoutidis P. Dissipativity learning control (DLCtheoretical foundations of input-output data-driven model-free control. Syst Control Lett. 2021;147:104831. doi:10.1016/j.sysconle.2020.104831. [Google Scholar] [CrossRef]
90. Yagi M, Sawada Y. Bilateral control of flexible master-slave arms with time-varying delay affected by contact force from obstacle. SICE J Control, Meas, Syst Integrat. 2017;10(1):2–9. doi:10.9746/jcmsi.10.2. [Google Scholar] [CrossRef]
91. Jafari A, Nabeel M, Singh H, Ryu J-H. Stable and transparent teleoperation over communication time-delay: Observer-based input-to-state stable approach. In: 2016 IEEE Haptics Symposium (HAPTICS), 2016 Apr 8–11; Philadelphia, Pennsylvania, USA; IEEE. [Google Scholar]
92. Chen Z, Liang B, Zhang T, Wang X. Bilateral teleoperation in cartesian space with time-varying delay. Int J Adv Robot Syst. 2012;9(4):110. doi:10.5772/51321. [Google Scholar] [CrossRef]
93. Ghavifekr AA, Chehraghi S, De Rossi G. An analysis of sampling effect on the absolute stability of discrete-time bilateral teleoperation systems. In: 2019 IEEE East-West Design & Test Symposium (EWDTS), 2019 Sep 13–16; Batumi, Georgia; IEEE. [Google Scholar]
94. Chen Z, Pan YJ, Gu J. A novel adaptive robust control architecture for bilateral teleoperation systems under time-varying delays. Int J Robust Nonlinear Control. 2015;25(17):3349–66. doi:10.1002/rnc.3267. [Google Scholar] [CrossRef]
95. Abut T, Soyguder S. Real-time control of bilateral teleoperation system with adaptive computed torque method. Ind Robot. 2017;44(3):299–311. doi:10.1108/IR-09-2016-0245. [Google Scholar] [CrossRef]
96. Li Y, Yin Y, Zhang D. Adaptive task-space synchronization control of bilateral teleoperation systems with uncertain parameters and communication delays. IEEE Access. 2018;6:5740–8. doi:10.1109/ACCESS.2018.2789864. [Google Scholar] [CrossRef]
97. Lu S, Ban Y, Zhang X, Yang B, Liu S, Yin L, et al. Adaptive control of time delay teleoperation system with uncertain dynamics. Front Neurorobot. 2022;16:107. doi:10.3389/fnbot.2022.928863. [Google Scholar] [PubMed] [CrossRef]
98. Gao X, Silvério J, Calinon S, Li M, Xiao X. Bilateral teleoperation with object-adaptive mapping. Complex Intell Syst. 2022;8(4):2983–90. doi:10.1007/s40747-021-00546-z. [Google Scholar] [PubMed] [CrossRef]
99. Michel Y, Rahal R, Pacchierotti C, Giordano PR, Lee D. Bilateral teleoperation with adaptive impedance control for contact tasks. IEEE Robot Automat Lett. 2021;6(3):5429–36. doi:10.1109/LRA.2021.3066974. [Google Scholar] [CrossRef]
100. Mehrjouyan A, Menhaj MB, Khosravi MA. Robust observer-based adaptive synchronization control of uncertain nonlinear bilateral teleoperation systems under time-varying delay. Measurement. 2021;182:109542. doi:10.1016/j.measurement.2021.109542. [Google Scholar] [CrossRef]
101. Lee D, Huang K. Toward high-performance stable haptic teleoperation over the internet: passive set-position modulation (PSPM) approach. Network Humans, Robot Environ. 2013;(21):193–213. doi:10.2174/9781608057313113010014. [Google Scholar] [CrossRef]
102. Lee D, Huang K. Passive-set-position-modulation framework for interactive robotic systems. IEEE Trans Robot. 2010;26(2):354–69. doi:10.1109/TRO.2010.2041877. [Google Scholar] [CrossRef]
103. Yang Y, Constantinescu D, Shi Y. Input-to-state stable bilateral teleoperation by dynamic interconnection and damping injection: theory and experiments. IEEE Trans Ind Electron. 2019;67(1):790–9. [Google Scholar]
104. Yang H, Zuo Z, Lee D. Haptic tele-driving of wheeled mobile robot over the internet via PSPM approach: theory and experiment. Adv Robot. 2018;32(13):683–96. doi:10.1080/01691864.2018.1433061. [Google Scholar] [CrossRef]
105. Abi-Farraj F, Pedemonte N, Giordano PR. A visual-based shared control architecture for remote telemanipulation. In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016 Oct 9–14; Daejeon, Republic of Korea. [Google Scholar]
106. Heck DJ, Saccon A, Nijmeijer H. A two-layer architecture for force-reflecting bilateral teleoperation with time delays. In: 2015 54th IEEE Conference on Decision and Control (CDC), 2015 Dec 15–18; Osaka, Japan; IEEE. [Google Scholar]
107. Loschi F, Piccinelli N, Dall’Alba D, Muradore R, Fiorini P, Secchi C. An optimized two-layer approach for efficient and robustly stable bilateral teleoperation. In: 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021 30 May–5 Jun; Xi'an, China; IEEE. [Google Scholar]
108. Piccinelli N, Muradore R. A passivity-based bilateral teleoperation architecture using distributed nonlinear model predictive control. In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020; Las Vegas, NV, USA; IEEE. [Google Scholar]
109. Minelli M, Ferraguti F, Piccinelli N, Muradore R, Secchi C. An energy-shared two-layer approach for multi-master-multi-slave bilateral teleoperation systems. In: 2019 International Conference on Robotics and Automation (ICRA), 2019 May 20–24; Montreal, QC, Canada. [Google Scholar]
110. Minelli M, Piccinelli N, Falezza F, Ferraguti F, Muradore R, Secchi C. Two-layer-based multiarms bilateral teleoperation architecture. IEEE Trans Control Syst Technol. 2023;31(3):1266–79. doi:10.1109/TCST.2022.3225732. [Google Scholar] [CrossRef]
111. Sartori E, Tadiello C, Secchi C, Muradore R. Tele-echography using a two-layer teleoperation algorithm with energy scaling. In: 2019 International Conference on Robotics and Automation (ICRA), 2019 May 20–24; Montreal, QC, Canada. [Google Scholar]
112. Coelho A, Singh H, Muskardin T, Balachandran R, Kondak K. Smoother position-drift compensation for time domain passivity approach based teleoperation. In: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 Oct 1–5; Madrid, Spain; IEEE. [Google Scholar]
113. De Stefano M, Balachandran R, Giordano AM, Ott C, Secchi C. An energy-based approach for the multi-rate control of a manipulator on an actuated base. In: 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018 May 21–25; Brisbane, Australia; IEEE. [Google Scholar]
114. De Stefano M, Vezzadini L, Secchi C. Time-delay compensation using energy tank for satellite dynamics robotic simulators. In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 Nov 3–8; Macau, China; IEEE. [Google Scholar]
115. Porcini F, Solazzi M, Frisoli A. Optimal joint tdpa formulation for kinematically redundant robot manipulators. In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 Oct 23–27; Kyoto, Japan; IEEE. [Google Scholar]
116. Xu X, Panzirsch M, Liu Q, Steinbach E. Integrating haptic data reduction with energy reflection-based passivity control for time-delayed teleoperation. In: 2020 IEEE Haptics Symposium (HAPTICS), 2020 Mar 28–31; Crystal City, VA, USA. [Google Scholar]
117. Benzi F, Ferraguti F, Riggio G, Secchi C. An energy-based control architecture for shared autonomy. IEEE Trans Robot. 2022;38(6):3917–35. doi:10.1109/TRO.2022.3180885. [Google Scholar] [CrossRef]
118. Rad NF, Nagamune R. Adaptive energy reference time domain passivity control of haptic interfaces. IEEE Trans Haptics. IEEE Transac on Haptics, 2023 Jul–Sep;17(3):360–71. [Google Scholar]
119. Su H, Qi W, Yang C, Sandoval J, Ferrigno G, De Momi E. Deep neural network approach in robot tool dynamics identification for bilateral teleoperation. IEEE Robot Automat Lett. 2020;5(2):2943–9. doi:10.1109/LRA.2020.2974445. [Google Scholar] [CrossRef]
120. Su H, Yang C, Mdeihly H, Rizzo A, Ferrigno G, De Momi E. Neural network enhanced robot tool identification and calibration for bilateral teleoperation. IEEE Access. 2019;7:122041–51. doi:10.1109/ACCESS.2019.2936334. [Google Scholar] [CrossRef]
121. Gao X, Silvério J, Pignat E, Calinon S, Li M, Xiao X. Motion mappings for continuous bilateral teleoperation. IEEE Robot Automat Lett. 2021;6(3):5048–55. doi:10.1109/LRA.2021.3068924. [Google Scholar] [CrossRef]
122. Wang H, Liu PX, Liu S. Adaptive neural synchronization control for bilateral teleoperation systems with time delay and backlash-like hysteresis. IEEE Trans Cybernet. 2017;47(10):3018–26. doi:10.1109/TCYB.2016.2644656. [Google Scholar] [PubMed] [CrossRef]
123. Huang F, Zhang W, Chen Z, Tang J, Song W, Zhu S. RBFNN-based adaptive sliding mode control design for nonlinear bilateral teleoperation system under time-varying delays. IEEE Access. 2019;7:11905–12. doi:10.1109/ACCESS.2019.2891887. [Google Scholar] [CrossRef]
124. Wang Y, Tian J, Liu Y, Yang B, Liu S, Yin L, et al. Adaptive neural network control of time delay teleoperation system based on model approximation. Sensors. 2021;21(22):7443. doi:10.3390/s21227443. [Google Scholar] [PubMed] [CrossRef]
125. Li Y, Li Y, Sun X, Zheng W, Yin L. Improved bilateral neural network adaptive controller using neural network and adaptive method. In: Basic & clinical pharmacology & toxicology. NJ, USA: Wiley; 2020. [Google Scholar]
126. Chen Z, Huang F, Sun W, Gu J, Yao B. RBF-neural-network-based adaptive robust control for nonlinear bilateral teleoperation manipulators with uncertainty and time delay. IEEE/ASME Trans Mech. 2020;25(2):906–18. doi:10.1109/TMECH.2019.2962081. [Google Scholar] [CrossRef]
127. Yuan S, Yu X, Yang Y, Silvestre C, He W. Adaptive neural network control in bilateral teleoperation systems with full-state constraints. In: 2020 Chinese Automation Congress (CAC), 2020 Nov 6–8; Shanghai, China. [Google Scholar]
128. Li H, Chou W. Adaptive FNN backstepping control for nonlinear bilateral teleoperation with asymmetric time delays and uncertainties. Int J Control, Automat Syst. 2023;21(9):3091–104. doi:10.1007/s12555-022-0158-9. [Google Scholar] [CrossRef]
129. Gong X, Wang L, Mou Y, Wang H, Wei X, Zheng W, et al. Improved four-channel PBTDPA control strategy using force feedback bilateral teleoperation system. Int J Control, Automat Syst. 2022;20(3):1002–17. doi:10.1007/s12555-021-0096-y. [Google Scholar] [CrossRef]
130. Choi H, Piao J, Kim E-S, Jung J, Choi E, Park J-O, et al. Intuitive bilateral teleoperation of a cable-driven parallel robot controlled by a cable-driven parallel robot. Int J Control, Automat Syst. 2020;18(7):1792–805. doi:10.1007/s12555-019-0549-8. [Google Scholar] [CrossRef]
131. Haruna M, Ogino M, Koike-Akino T. Proposal and evaluation of visual haptics for manipulation of remote machine system. Front Rob AI. 2020;7:529040. doi:10.3389/frobt.2020.529040. [Google Scholar] [PubMed] [CrossRef]
132. Zhou X, Yang Z, Ren Y, Bai W, Lo B, Yeatman EM. Modified bilateral active estimation model: a learning-based solution to the time delay problem in robotic tele-control. IEEE Robot Automat Lett. 2023;8(5):2653–60. doi:10.1109/LRA.2023.3257708. [Google Scholar] [CrossRef]
133. Zhang Q, Zhao W, Chu S, Wang L, Fu J, Yang J, et al. Research progress of nuclear emergency response robot. In: IOP Conference Series: Materials Science and Engineering, 2018 Sep 5–16; Melbourne, Australia; IOP Publishing. [Google Scholar]
134. Jung Y, Cho D, Hong J, Han S, Cho S, Shin D, et al. Development of multi-sensor module mounted mobile robot for disaster field investigation. Int Arch Photogramm, Remote Sens Spat Inf Sci. 2022;43:1103–8. [Google Scholar]
135. Kallu KD, Abbasi SJ, Khan H, Wang J, Lee MC. Tele-operated bilateral control of hydraulic manipulator using a robust controller based on the sensorless estimated reaction force. Appl Sci. 2019;9(10):1995. doi:10.3390/app9101995. [Google Scholar] [CrossRef]
136. Pruks V, Lee KH, Ryu JH. Shared teleoperation for nuclear plant robotics using interactive virtual guidance generation and shared autonomy approaches. In: 2018 15th International Conference on Ubiquitous Robots (UR), 2018 Jun 26–30; Honolulu, HI, USA. [Google Scholar]
137. Ju C, Son HI. Human-centered evaluation of shared teleoperation system for maintenance and repair tasks in nuclear power plants. Int J Control, Automat Syst. 2022;20(10):3418–32. doi:10.1007/s12555-021-0770-0. [Google Scholar] [CrossRef]
138. Zhao J, Zhao Z, Yang X, Zhao L, Yang G, Liu H. Inverse kinematics and workspace analysis of a novel SSRMS-type reconfigurable space manipulator with two lockable passive telescopic links. Mech Mach Theory. 2023;180:105152. doi:10.1016/j.mechmachtheory.2022.105152. [Google Scholar] [CrossRef]
139. Schiele A, Krüger T, Kimmer S, Aiple M, Rebelo J, Smisek J, et al. Haptics-2—A system for bilateral control experiments from space to ground via geosynchronous satellites. In: 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2016 Oct 9–12; Budapest, Hungary. [Google Scholar]
140. Panzirsch M, Singh H, Krüger T, Ott C, Albu-Schäffer A. Safe interactions and kinesthetic feedback in high performance earth-to-moon teleoperation. In: 2020 IEEE Aerospace Conference, 2020 Mar 7–14; Big Sky, MT, USA. [Google Scholar]
141. Weber B, Balachandran R, Riecke C, Stulp F, Stelzer M. Teleoperating robots from the international space station: microgravity effects on performance with force feedback. In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 Nov 3–8; Macau, China; IEEE. [Google Scholar]
142. Shukla A, Karki H. Application of robotics in offshore oil and gas industry—A review Part II. Robot Autonom Syst. 2016;75:508–24. doi:10.1016/j.robot.2015.09.013. [Google Scholar] [CrossRef]
143. Sanfilippo F, Tang M, Steyaert S. Aquatic surface robots: the state of the art, challenges and possibilities. In: 2020 IEEE International Conference on Human-Machine Systems (ICHMS), 2020 Sep 7–9; Rome, Italy; IEEE. [Google Scholar]
144. Brantner G, Khatib O. Controlling ocean one: human-robot collaboration for deep-sea manipulation. J Field Robot. 2021;38(1):28–51. doi:10.1002/rob.v38.1. [Google Scholar] [CrossRef]
145. Aldhaheri S, Masi GD, Ardón ÈPP. Underwater robot manipulation: advances, challenges and prospective ventures. In: OCEANS 2022–Chennai, 2022 Feb 21–24; Chennai, India. [Google Scholar]
146. Gancet J, Urbina D, Letier P, Ilzokvitz M, Weiss P, Gauch F, et al. DexROV: dexterous undersea inspection and maintenance in presence of communication latencies. IFAC-PapersOnLine. 2015;48(2):218–23. doi:10.1016/j.ifacol.2015.06.036. [Google Scholar] [CrossRef]
147. Motoi N, Takizawa K, Sakiyama J. Development of underwater bilateral control by using manipulator with module structure. In: 2018 IEEE International Conference on Intelligence and Safety for Robotics (ISR), 2018 Aug 24–27; Shenyang, China. [Google Scholar]
148. Pham CD, Spiten C, From PJ. A control allocation approach to haptic control of underwater robots. In: 2015 IEEE International Workshop on Advanced Robotics and its Social Impacts (ARSO), 2015 Jun 30–Jul 2; Lyon, France; IEEE. [Google Scholar]
149. Douissard J, Hagen ME, Morel P. The da Vinci surgical system. In: Bariatric robotic surgery. Cham: Springer; 2019. p. 13–27. doi:10.1007/978-3-030-17223-7_3. [Google Scholar] [CrossRef]
150. Guo J, Liu C, Poignet P. A scaled bilateral teleoperation system for robotic-assisted surgery with time delay. J Intell Robot Syst. 2019;95:165–92. doi:10.1007/s10846-018-0918-1. [Google Scholar] [CrossRef]
151. Freschi C, Ferrari V, Melfi F, Ferrari M, Mosca F, Cuschieri A. Technical review of the da Vinci surgical telemanipulator. Int J Med Robot Comput Assist Surg. 2013;9(4):396–406. doi:10.1002/rcs.v9.4. [Google Scholar] [CrossRef]
152. Yilmaz N, Burkhart B, Deguet A, Kazanzides P, Tumerdem U. Sensorless transparency optimized haptic teleoperation on the da vinci research kit. IEEE Robot Autom Lett. 2023 Feb;9(2):971–8. [Google Scholar]
153. Su H, Schmirander Y, Li Z, Zhou X, Ferrigno G, De Momi E. Bilateral teleoperation control of a redundant manipulator with an RCM kinematic constraint. In: IEEE International Conference on Robotics and Automation (ICRA), 2020 Jun 12–14; Wuhan, China; IEEE. [Google Scholar]
154. Chen Y, Zhang B, Zhou J, Wang K. Real-time 3D unstructured environment reconstruction utilizing VR and Kinect-based immersive teleoperation for agricultural field robots. Comput Electron Agric. 2020;175:105579. doi:10.1016/j.compag.2020.105579. [Google Scholar] [CrossRef]
155. Guo S, Song Y, Yin X, Zhang L, Tamiya T, Hirata H, et al. A novel robot-assisted endovascular catheterization system with haptic force feedback. IEEE Trans Robot. 2019;35(3):685–96. doi:10.1109/TRO.8860. [Google Scholar] [CrossRef]
156. Ushimaru K, Sato N, Morita Y. Haptic device that presents sensation corresponding to palm on back of hand for teleoperation of robot hand, report 4: consideration of the detection error of the stimulus position between the palm and the back of the hand. In: Proceeding of International Symposium on Socially and Technically Symbiotic Systems, STSS-35, 2021 Nov 15–17; Okayama, Japan. [Google Scholar]
157. Lu S, Yang J, Yang B, Li X, Yin Z, Yin L, et al. Surgical instrument posture estimation and tracking based on LSTM. ICT Express. 2024 Jun;10(3):465–71. [Google Scholar]
158. Lu S, Yang J, Yang B, Yin Z, Liu M, Yin L, et al. Analysis and design of surgical instrument localization algorithm. Comput Model Eng Sci. 2023;137(1):669–85. doi:10.32604/cmes.2023.027417. [Google Scholar] [CrossRef]
159. Gumbs AA, Abu-Hilal M, Tsai T-J, Starker L, Chouillard E, Croner R. Keeping surgeons in the loop: are handheld robotics the best path towards more autonomous actions?(A comparison of complete vs. handheld robotic hepatectomy for colorectal liver metastases). Artif Intell Surg. 2021;1:38–51. [Google Scholar]
160. Singh A, Khanna A, Pratihar SK, Vasudev V, Saurabh N, Rawal S. MP68-12 our early clinical experience with Mantratm multi arm surgical robotic system (SS Innovations Group Company) in major uro-oncological surgeries. J Urol. 2023;209(Supplement 4):e957. [Google Scholar]
161. Ebrahimi Bavili R, Akbari A, Mahboobi Esfanjani R. Controller design for nonlinear bilateral teleoperation systems via total energy shaping. Mech Syst Signal Process. 2021;150(12):107239. doi:10.1016/j.ymssp.2020.107239. [Google Scholar] [CrossRef]
162. Liu Y, Tsai Y-Y, Huang B, Guo J. Virtual reality based tactile sensing enhancements for bilateral teleoperation system with in-hand manipulation. IEEE Robot Autom Lett. 2022;7(3):6998–7005. doi:10.1109/LRA.2022.3161711. [Google Scholar] [CrossRef]
163. Ma Z, Shi D, Liu Z, Yu J, Huang P. A bilateral teleoperation system with learning-based cognitive guiding force. IEEE Trans Cogn Dev Syst. 2023 Dec;15(4):2214–27. [Google Scholar]
164. Zheng W, Yang Y, Liu C, Zhou W. Recent advancements in sensor technologies for healthcare and biomedical applications. Sensors. 2023;23(6):3218. doi:10.3390/s23063218. [Google Scholar] [PubMed] [CrossRef]
165. Zheng W, Liu M, Liu C, Wang D, Li K. Recent advances in sensor technology for healthcare and biomedical applications (Volume II). Sensors. 2023;23(13):5949. doi:10.3390/s23135949. [Google Scholar] [PubMed] [CrossRef]
166. Altalbe A, Khan MN, Tahir M, Shahzad A. Orientation control design of a telepresence robot: an experimental verification in healthcare system. Appl Sci. 2023;13(11):6827. doi:10.3390/app13116827. [Google Scholar] [CrossRef]
167. Andrew AG, Silvana P, Bernard DA, Elie C. What is artificial intelligence surgery? Artif Intell Surg. 2021;1(1):1–10. [Google Scholar]
168. Deutsch-Link S, Scarlett YV, Sandler RS. Changing master and slave terminology in robotic-assisted technologies. Gastrointest Endosc. 2023;97(2):377. doi:10.1016/j.gie.2022.09.015. [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools