
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

An Improved Local RBF Collocation Method for 3D Excavation Deformation Based on Direct Method and Mapping Technique
1 Technology Center, Zhongheng Construction Group Co., Ltd., Nanchang, 330200, China
2 School of Infrastructure Engineering, Nanchang University, Nanchang, 330031, China
3 Zienkiewicz Centre for Computational Engineering, Swansea University, Swansea, SA2 8PP, UK
* Corresponding Author: Hui Zheng. Email:
(This article belongs to the Special Issue: New Trends on Meshless Method and Numerical Analysis)
Computer Modeling in Engineering & Sciences 2025, 142(2), 2147-2172. https://doi.org/10.32604/cmes.2025.059750
Received 16 October 2024; Accepted 27 December 2024; Issue published 27 January 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Since the plasticity of soil and the irregular shape of the excavation, the efficiency and stability of the traditional local radial basis function (RBF) collocation method (LRBFCM) are inadequate for analyzing three-dimensional (3D) deformation of deep excavation. In this work, the technique known as the direct method, where the local influence nodes are collocated on a straight line, is introduced to optimize the LRBFCM. The direct method can improve the accuracy of the partial derivative, reduce the size effect caused by the large length-width ratio, and weaken the influence of the shape parameters on the LRBFCM. The mapping technique is adopted to transform the physical coordinates of a quadratic-type block to normalized coordinates, in which the deformation problem can easily be solved using the direct method. The stability of the LRBFCM is further modified by considering the irregular shape of 3D excavation, which is divided into several quadratic-type blocks. The soil’s plasticity is described by the Drucker-Prager (D-P) model. The improved LRBFCM is integrated with the incremental method to analyze the plasticity. Five different examples, including strip excavations and circular excavations, are presented to validate the proposed approach’s efficiency.Keywords
The excavation is a kind of retaining structure, which is usually performed in congested urban areas to ensure the safety of the underground space [1,2]. The deformation is a key indicator used to assess the stability of excavation. Investigators have carried out a lot of numerical methods to calculate and predict excavation deformation [3,4], but some difficulties still exist in the numerical simulation of excavation. One of the difficulties comes from the elastic-plasticity of soil. The Drucker-Prager (D-P) model [5,6], which is modified from the Mises yield model and takes into account the influence of the first stress invariant, is usually used to describe the plasticity in the soil. In order to deal with the elastic-plastic deformation, the incremental theory is applied to reflect the influence of the stress path. However, the incremental theory is based on the accurate and stable calculation in each incremental step, otherwise the error would continuously accumulate. Additionally, the size effect caused by various excavation shapes is often present in excavation engineering, such as the circular excavation [7,8]. The circular excavation shape can reduce the lateral deformation due to the circumferential hoop force. Therefore, a three-dimensional (3D) geotechnical model with a relatively complex shape is necessary for excavation simulation. A typical excavation is mainly composed of the soil and support structure which must be considered separately. In this structure, the support part typically has a large length-width ratio. It is not efficient to use the same node arrays or elements in different axis directions for this kind of 3D problem.
The finite element method (FEM) is commonly used to simulate the practical problems of excavation [7,9,10]. Although the FEM has the advantages such as a simple principle and strong adaptability, some meshless methods show advantages over the FEM in computational efficiency, accuracy, solving high-dimensional problems, and handling complex geometries [11]. In the last decade, some meshless methods were applied to solve boundary value problems, such as the method of the fundamental solution [12] and the boundary knot method [13]. In order to avoid dense matrices, various localized techniques have been employed, leading to the development of many different localized methods, such as the localized boundary knot method [14] and the localized method of fundamental solutions [15]. The local radial basis function collocation method (LRBFCM), which is modified from the global radial basis function collocation method, and the interpolation calculation is applied in a local domain, is one of the famous localized meshless methods [16–18]. By using LRBFCM, some elastic-plasticity problems and other nonlinear problems could be solved [19–21]. Our tests have shown that the traditional LRBFCM is difficult to directly combine with the incremental method for solving elastic-plastic excavation problems, as its accuracy and stability need improvement. The traditional LRBFCM exhibits poor accuracy in solving first-order derivatives, as analyzed in reference [11]. These first-order derivatives are prevalent in the excavation problems, as they arise not only from the stress boundary conditions but also from the governing equations themselves. Additionally, the accuracy of the RBF collocation method is greatly influenced by the value of the shape parameter. Although there is no universal and simple method to obtain the optimal shape parameters so far, scholars have realized that the shape parameters are mainly influenced by the Euclidean distances between collocation nodes [22–24]. Zheng et al. [11] proposed the direct method, where the nodes on a straight line are used to construct the first-order derivative matrix to address the instability problem in dealing with Neumann boundary conditions. This method can also significantly improve the accuracy of the computation of first-order partial derivatives. Through further research, the direct method can be extended to the partial derivative computation for interior nodes to improve the computational accuracy and reduce the influence of shape parameters [25]. Furthermore, we find the direct method could also improve calculation efficiency in the simulation of the large length-width ratio shape problems, such as the excavation’s support structure in this work.
In actual excavation engineering, excavations often have irregular shapes, which are difficult to describe in simulations. There are many numerical methods available for solving problems with complex boundary shapes, including the localized boundary knot method [14], the radial basis function collocation method (RBFCM) [26], and the method of approximate particular solutions (MAPS) [27]. Zheng et al. [11] applied the fictitious nodes method to optimized the LRBFCM to solve the arbitrary shape problems, but the efficiency of describing irregular boundary shapes with this method is still not high enough for the excavation problems. Wen et al. [28,29] proposed the mapping technique in the finite block method (FBM) for the shape problems. By using the mapping technique, a quadratic-type domain was transformed from physical coordinates to normalized coordinates. The partial differential operators in the irregular physical domain were addressed by differential operators in the transformed normalized domain. The collocation nodes in this normalized domain can be distributed uniformly [30,31]. In this paper, the mapping technique is applied to LRBFCM to solve excavation problems. The irregular shape of the 3D excavation is described using several quadratic-type blocks.
In this paper, the optimized LRBFCM is applied in 3D excavation deformation calculation. The direct method and the mapping technique is employed to improve the traditional LRBFCM, making it possible to apply the LRBFCM to excavation problems and harnessing the algorithm’s advantages in accuracy and efficiency.
2 LRBFCM and the Numerical Technique
2.1 Indroduction of the LRBFCM
In the formulation of LRBFCM, the field variable
where
where
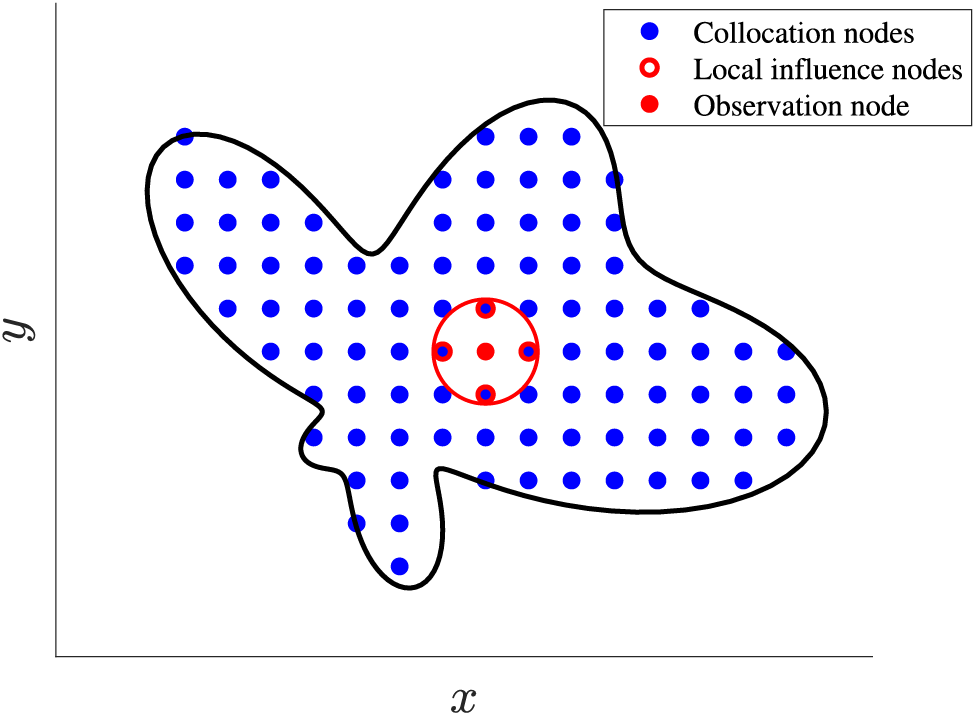
Figure 1: Sketch of the local nodes as
In the local influence domain,
where
The Eq. (2) can be rewritten as
Substituting Eq. (3) into Eq. (1), the field quantity and its differential form can be expressed as
where
where
The unknown field variable vector
2.2 The Direct Method and Optimization of the Local Nodes
The direct method is adopted to optimize the local nodes. Instead of using the nearest neighboring nodes, the direct method selects only the nearest nodes in the
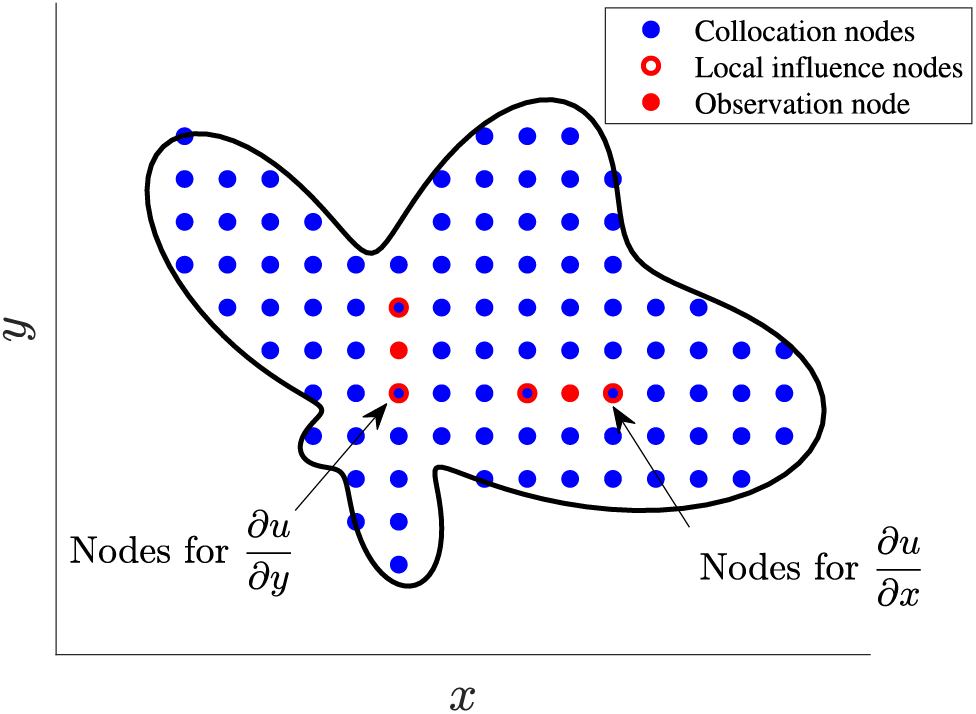
Figure 2: A condition of local points for the direct method
The local influence points of direct method is on a one-dimensional line, rather than in a circular configuration for two-dimension (or a spherical configuration for three-dimension). By introducing this method, the accuracy, efficiency, and stability of excavation problems would improve obviously: Firstly, a 2D or 3D problem is transformed into a 1D problem, as the local nodes are collocated along a straight line. This reduces the complexity of the calculation and improves the accuracy of the partial derivatives. Secondly, the direct method employs much fewer local points, leading to improved calculation efficiency. The direct method uses different nodes to address the partial derivatives in each coordinate direction, allowing for different point spacings to be considered in different directions. This feature is crucial for large length-width ratio shape problems, such as the support structure of excavation. Fig. 3 shows two different kinds of collocation node arrangements for a
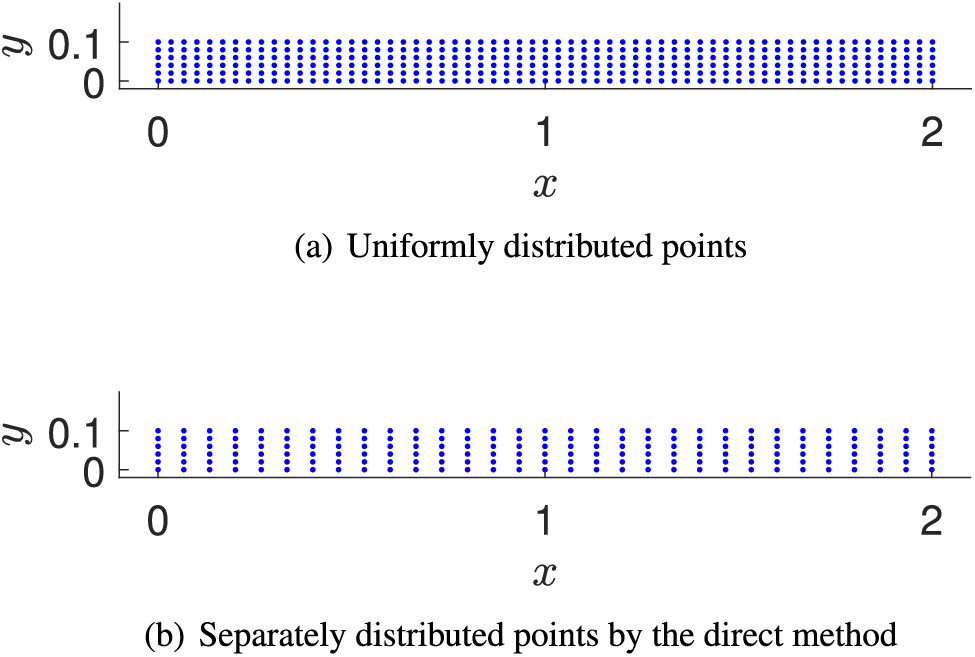
Figure 3: Collocation points for different methods
However, the direct method still requires the nodes to be neatly arranged in the direction of partial derivative
3 Coordinate Transform and Mapping Technique in 3D
To solve the irregular shape domain problems, we use the mapping technique to transform physical coordinates
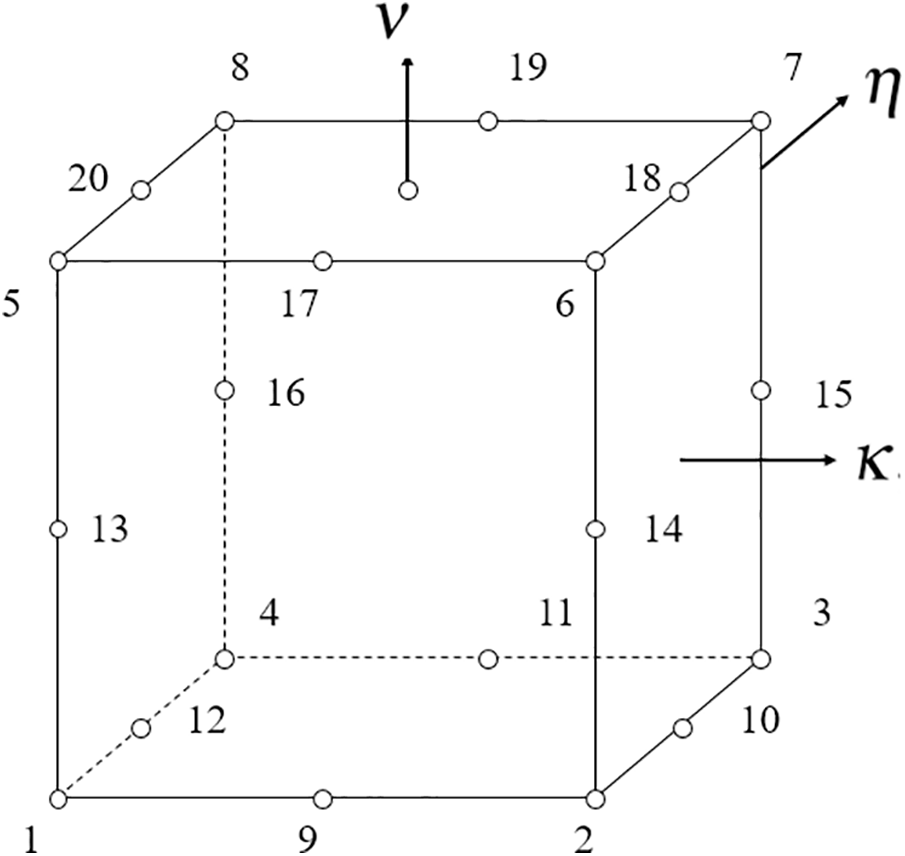
Figure 4: Normalised block and its mapping seeds
The partial differentials of shape functions are:
Then the physical coordinate can be written as
where
By utilizing the mapping technique, the partial derivatives in the physical coordinate system of a quadratic-type block can be expressed in terms of partial differentials in the normalized coordinate system. In this normalized domain, the direct method, as described in Section 2.2, can be applied. For irregular shapes, such as circular excavation, the calculational domain should be subdivided into several quadratic-type blocks, and the interpolation is implemented in each block individually. Further details on the mapping technique can be found in references [28–31].
In the excavation, the support structure is modeled as an elastic material, while the soil is simplified as an elastic-plastic body. This section provides a brief overview of elastic and elastic-plastic theories.
The equilibrium equations can be written as
where
where
where
where
where
For the classical elastic-plastic theory, the constitutive equations of an elastic-plastic body should be described in the incremental form [32,33]. Let
Then the stress-strain relation can be expressed as
or
where
The plasticity of soil is described by the Drucker-Prager (D-P) model [5,6]. Its yield condition is defined as
where
where
Due to the nonlinearity of elastic-plastic material, the stiffness matrix changes as the increase of equivalent plastic strain
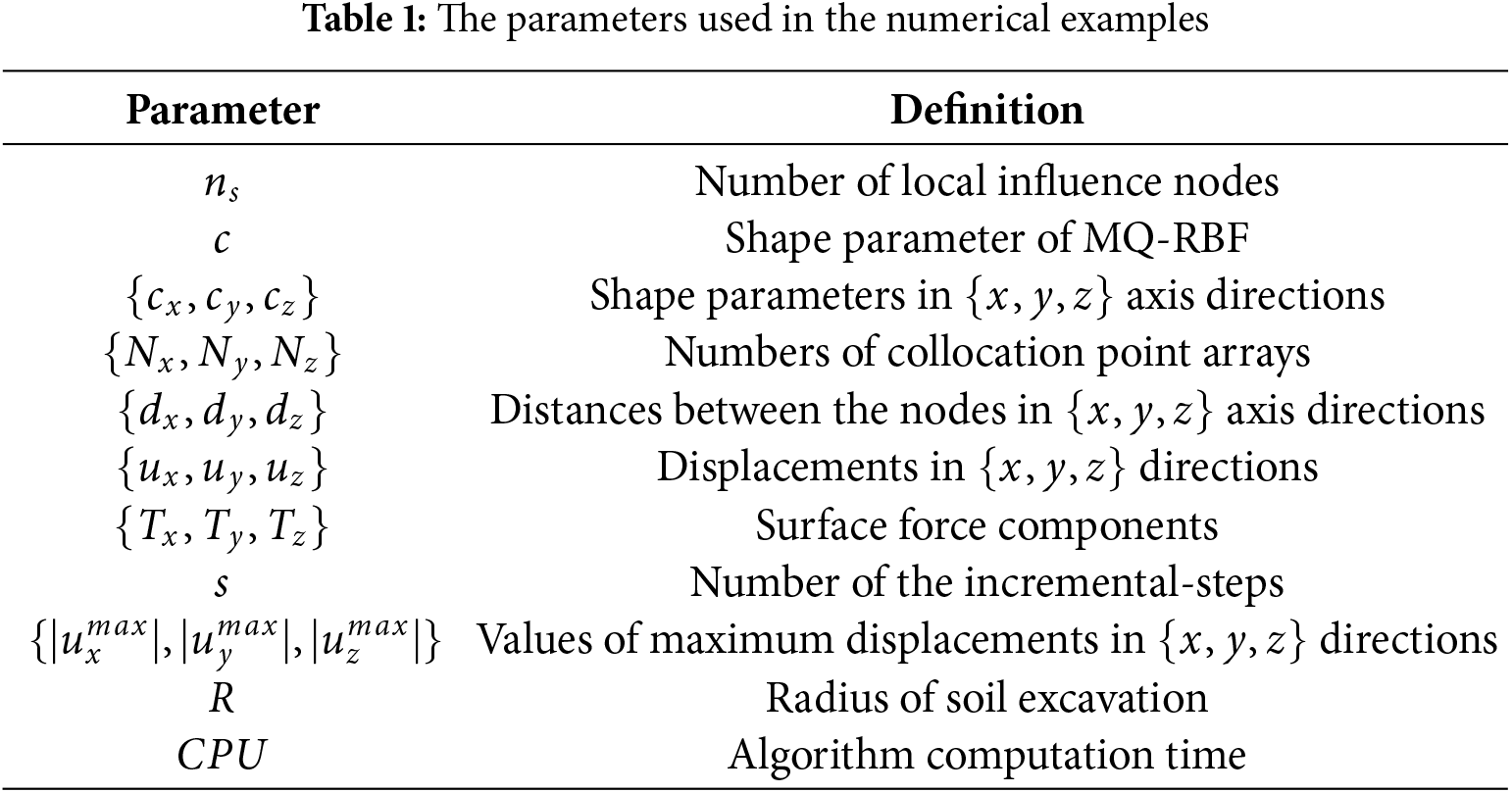
5 Numerical Results and Discussion
In this section, we will present some numerical examples to show the effectiveness of the proposed numerical method. In these examples, the parameters are denoted in Table 1. In order to distinguish the LRBFCM optimized by the direct method from the traditional LRBFCM, we refer to the optimized version as D-LRBFCM. Considering that displacement is the key indicator to judge the safety of excavation, we mainly analyze the displacement fields of excavation. As we know, strain and stress can be obtained by the displacement fields. Since no analytical solution is available in these examples, we compare our numerical outcomes of the LRBFCM with FEM and the relative error (
where
The mechanical parameters in these examples were determined with reference to literature [1–3] and in consideration of the local geotechnical conditions. In these numerical examples, the parameters of the support structure are Poisson’s ratio
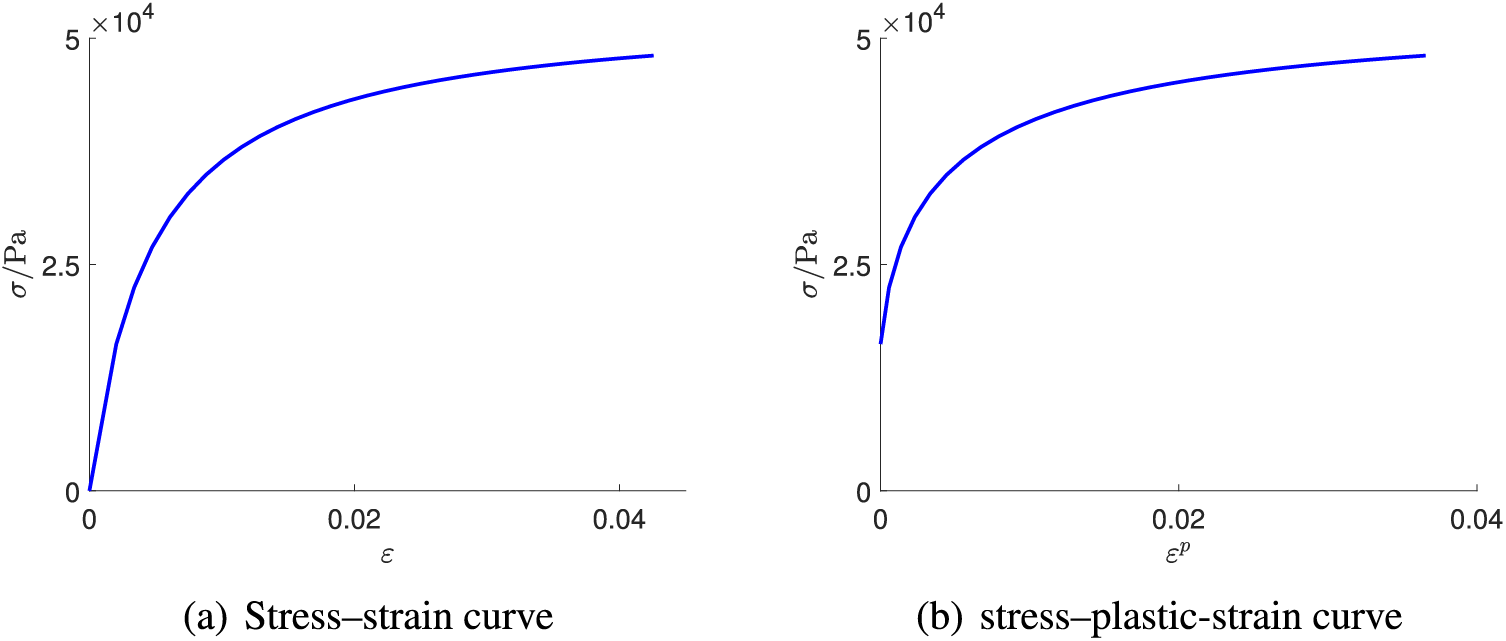
Figure 5: Uniaxial compression test results of soil
The numerical computations in this section were carried out using MATLAB© on a system equipped with an AMD EPYC Milan 7713 CPU (2.0 GHz), 64 GB of memory, and 16 cores, running CentOS Linux release 7.
An elastic case is used to show the improvement of the D-LRBFCM. As shown in Fig. 6, there is a
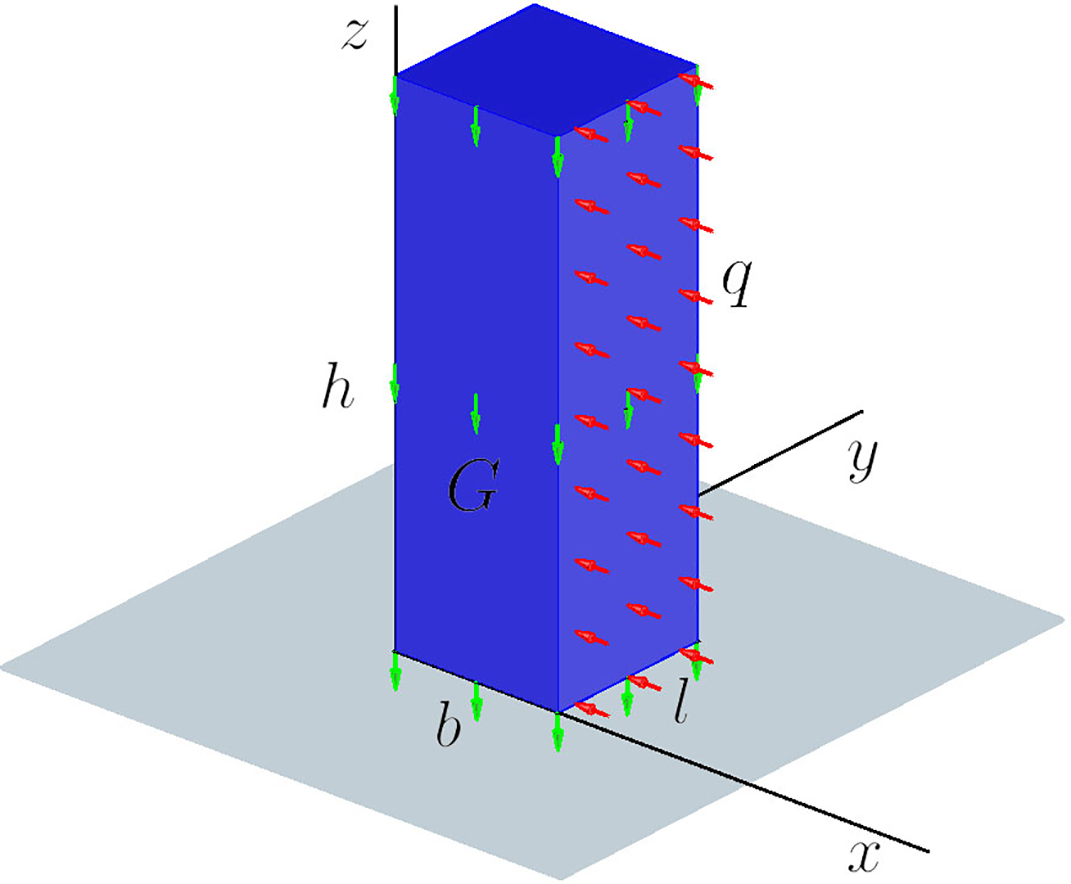
Figure 6: The mechanical state of Example 1
Firstly, we assume that
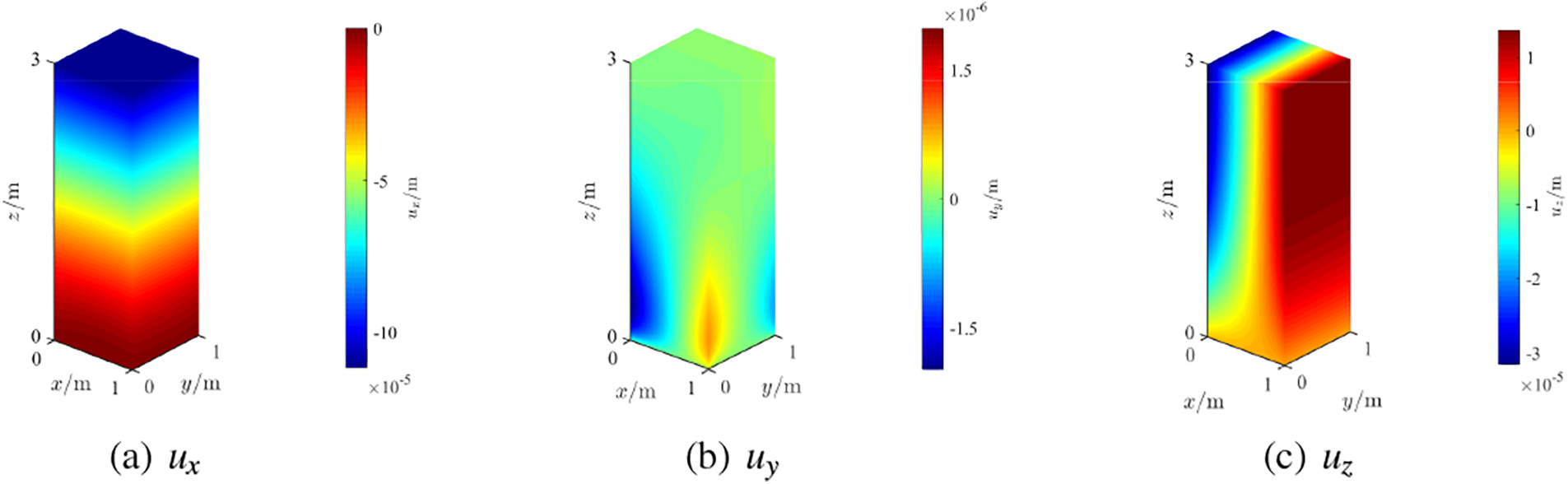
Figure 7: Displacement results of Example 1
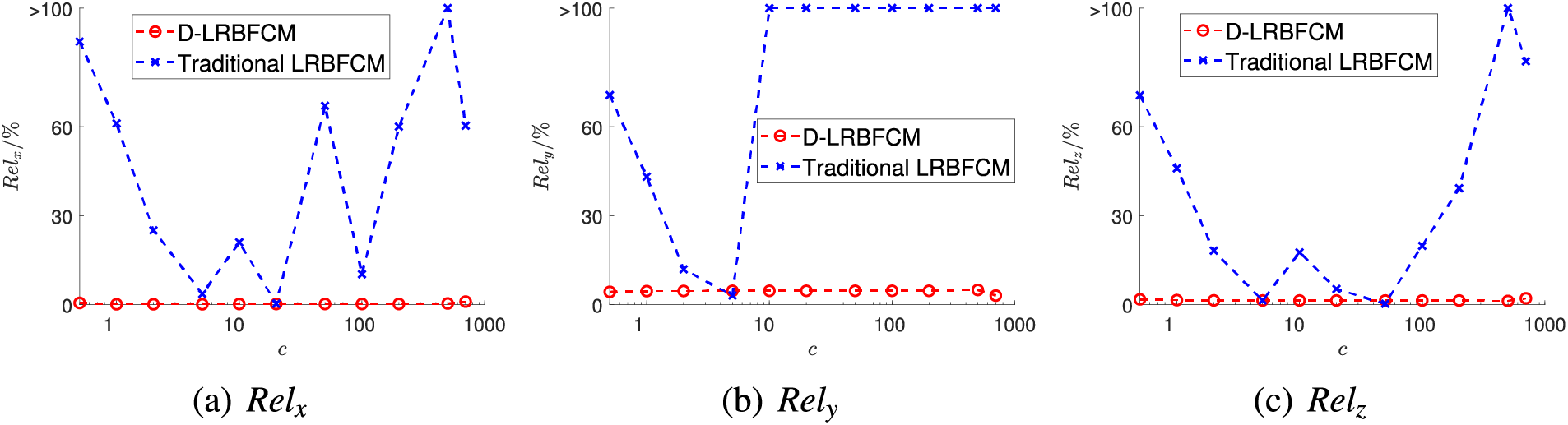
Figure 8: Numerical errors for different shape parameters
Next, we consider the case where
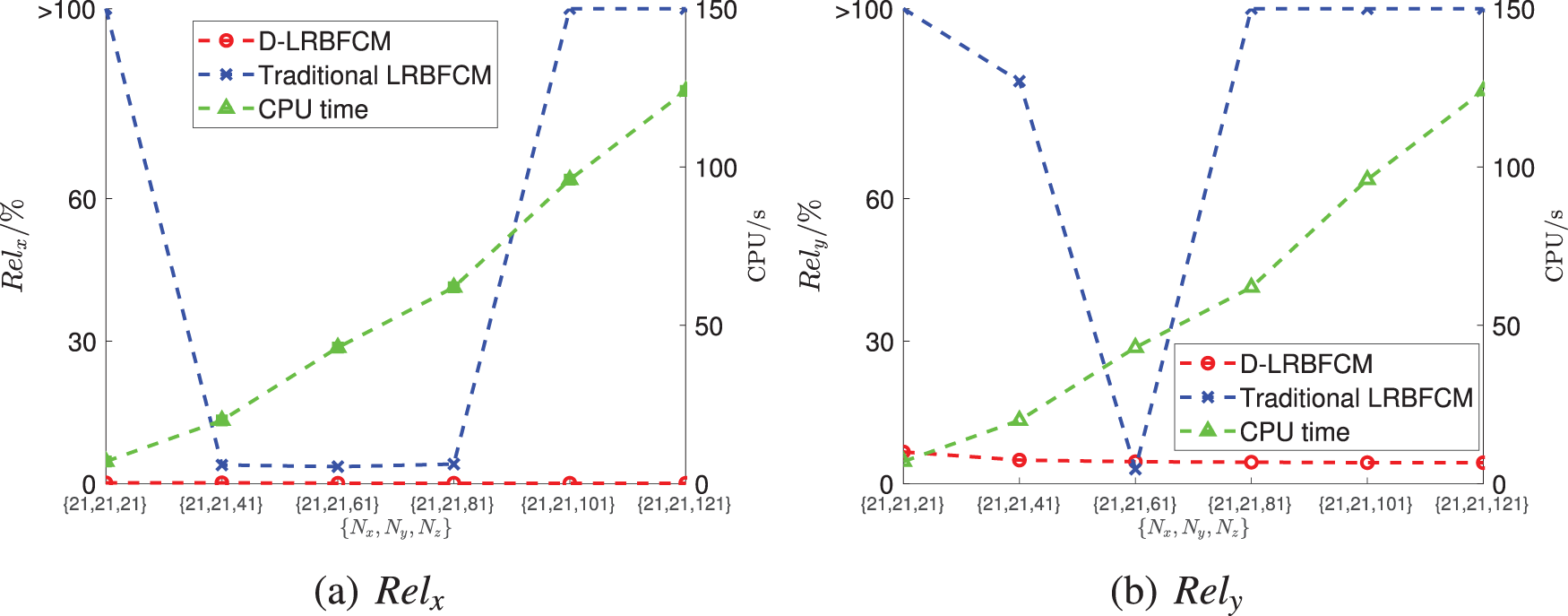
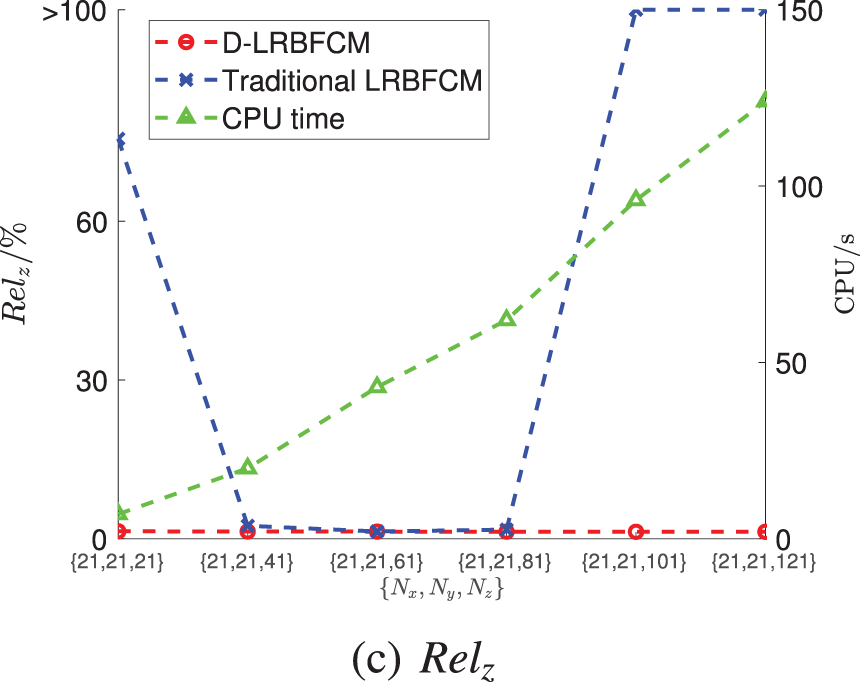
Figure 9: The accuracy under different node distributions
In order to assess the convergence of D-LRBFCM, the number of collocation nodes (
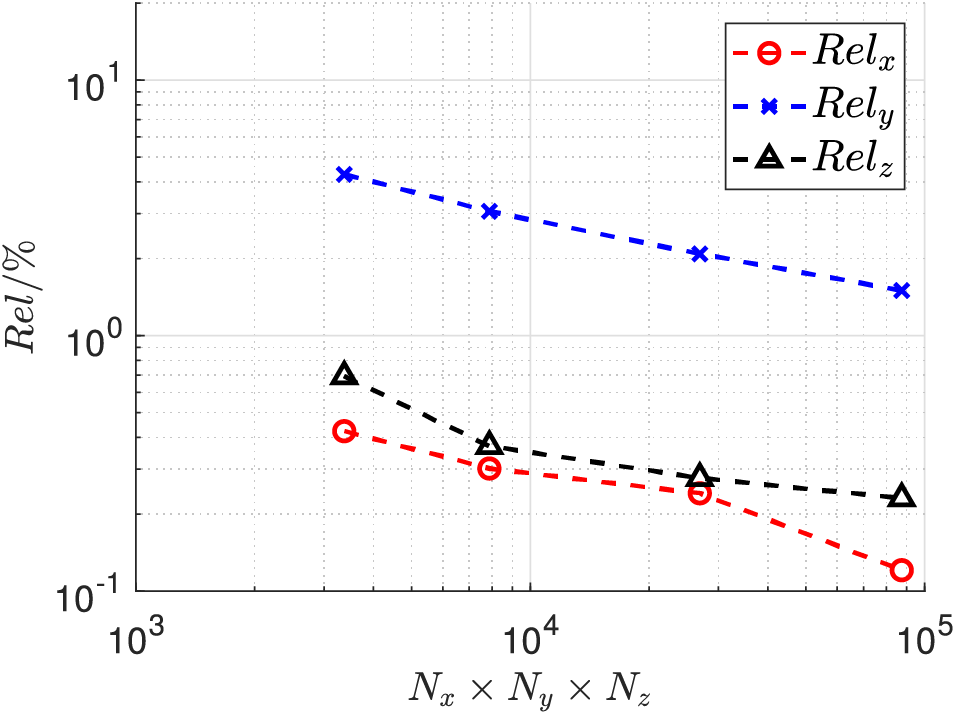
Figure 10: Displacement results for different node numbers
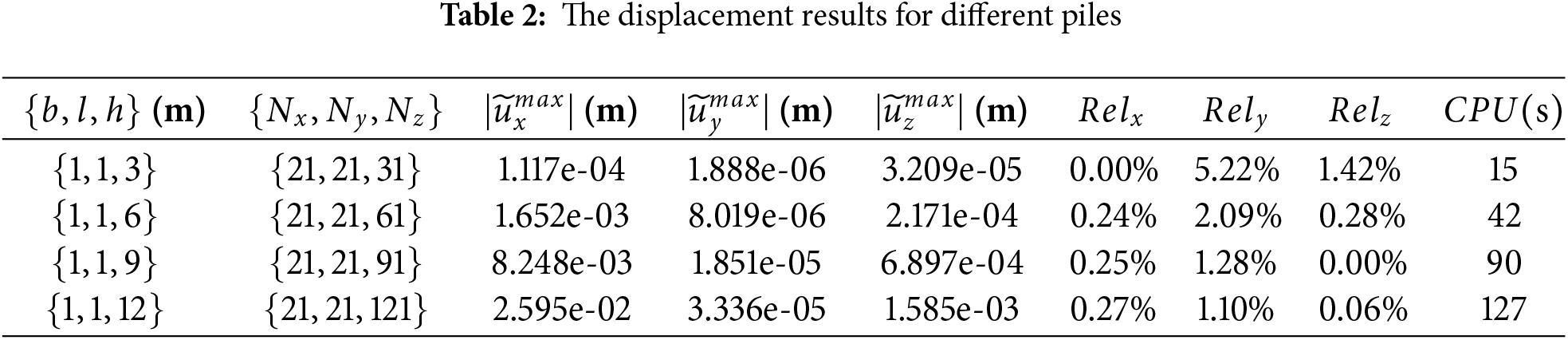
We further consider piles with different lengths, and the numerical results are shown in Table 2. The acceptable results for these four different sizes can be obtained by using the D-LRBFCM. We can infer that the D-LRBFCM could get acceptable outcomes if the parameters are chosen according to the above principles.
An elastic-plastic problem is discussed to demonstrate the effectiveness of the mapping technique and incremental method. A 8 m
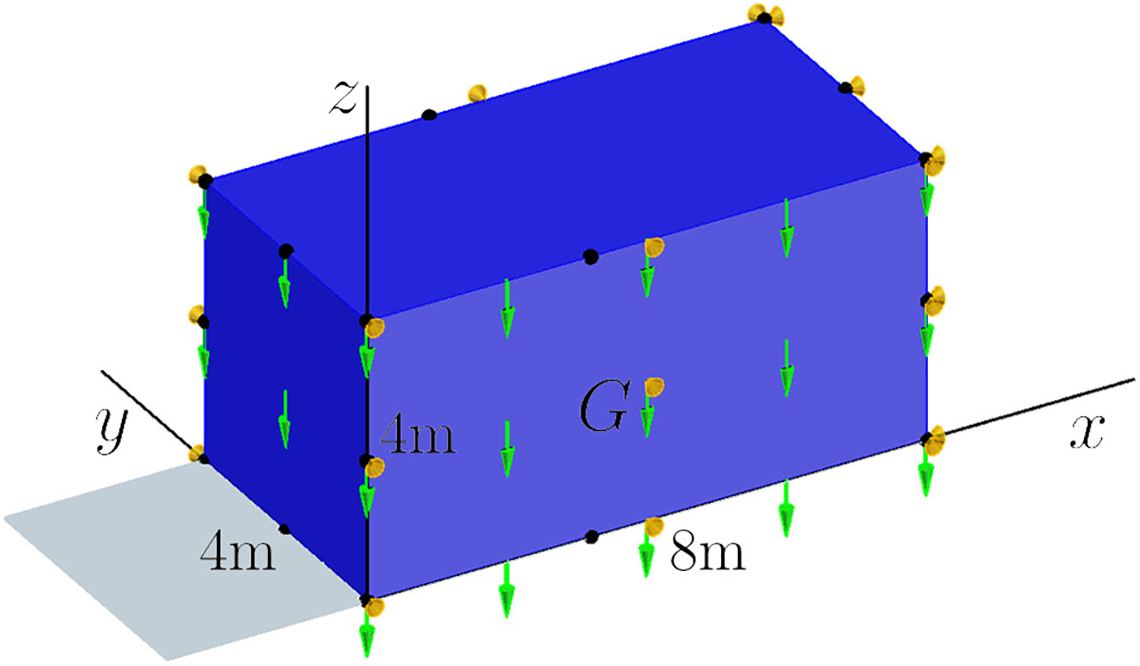
Figure 11: The mechanical state of Example 2
This example is essentially a plane strain problem, and
The displacement results of FEM are presented in Fig. 12 with
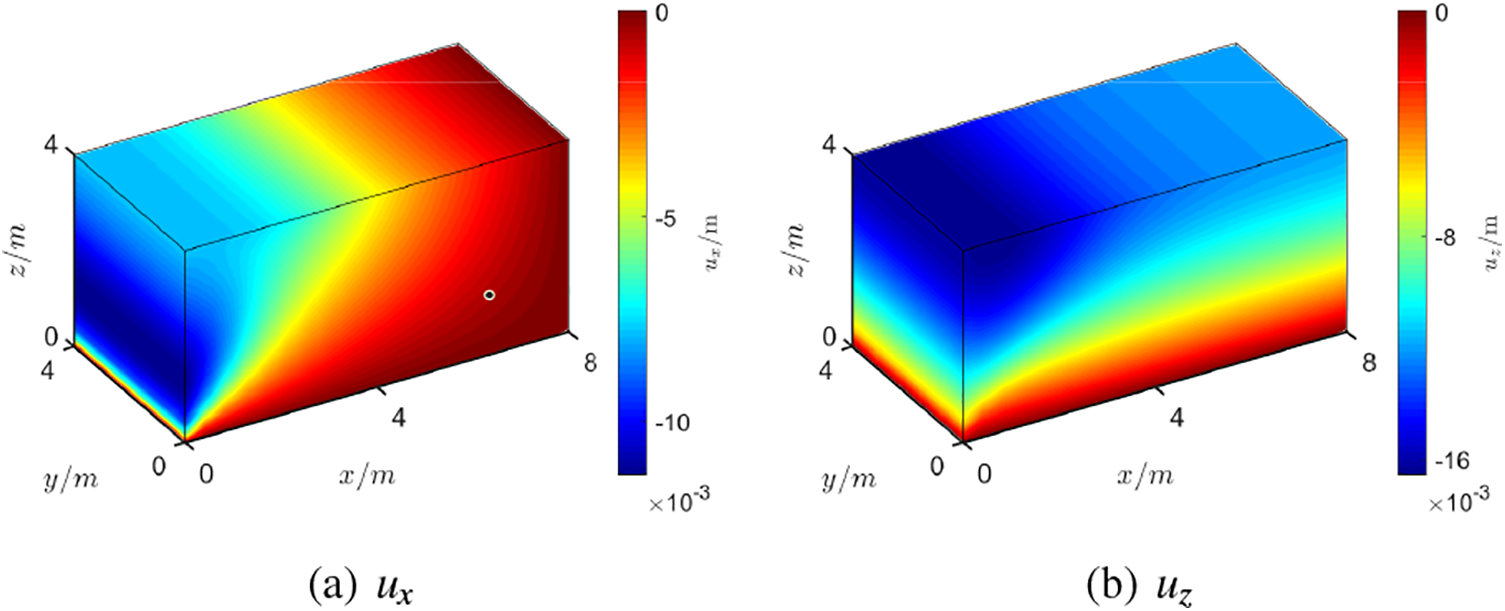
Figure 12: Displacement results of Example 2
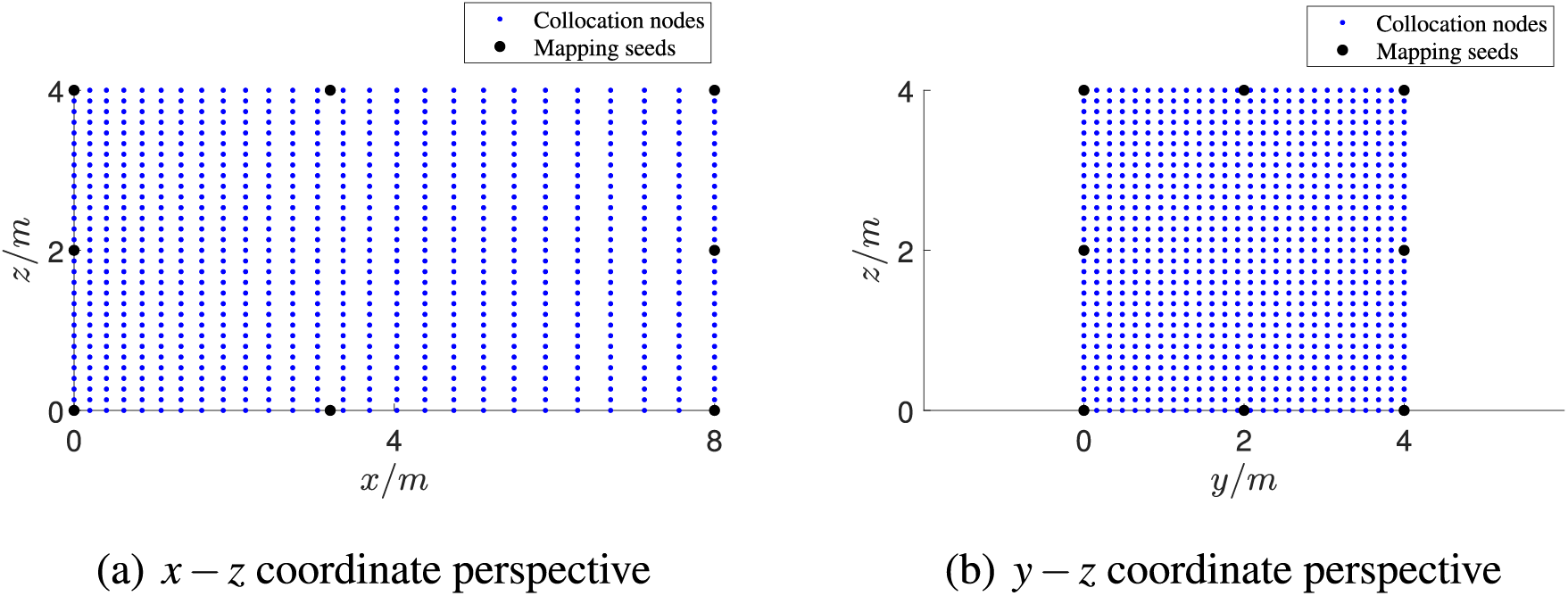
Figure 13: Node distribution in physical coordinate system
In the proposed method, we consider
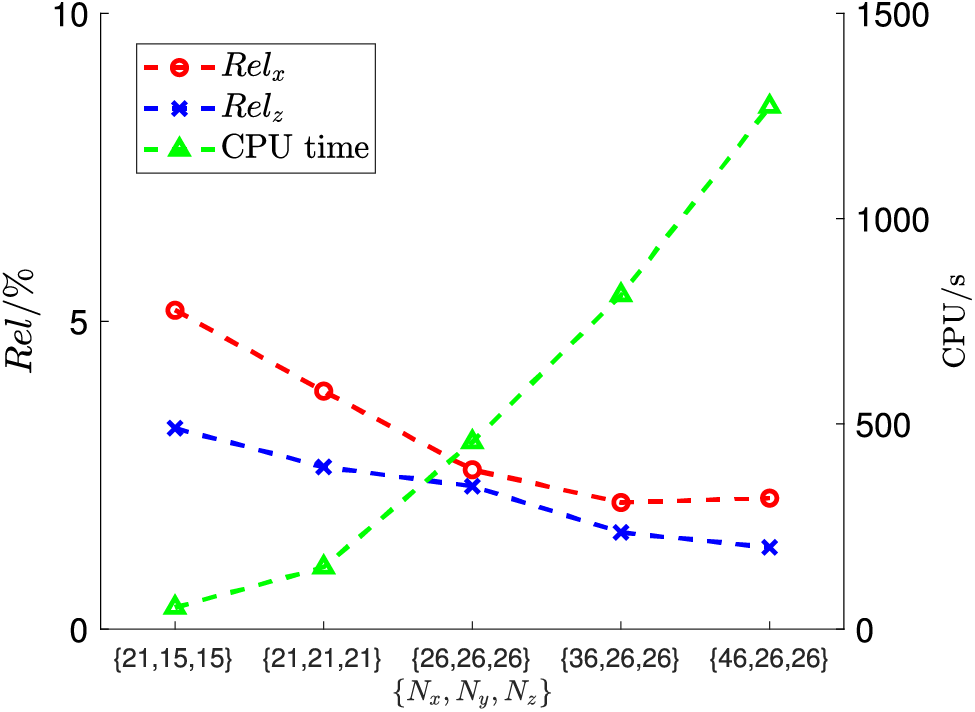
Figure 14: The accuracy of the D-LRBFCM under varying point arrays
Next, we use different incremental steps to calculate the elastic-plastic problem. The displacement solutions of the D-LRBFCM are shown in Fig. 15. As the number of steps
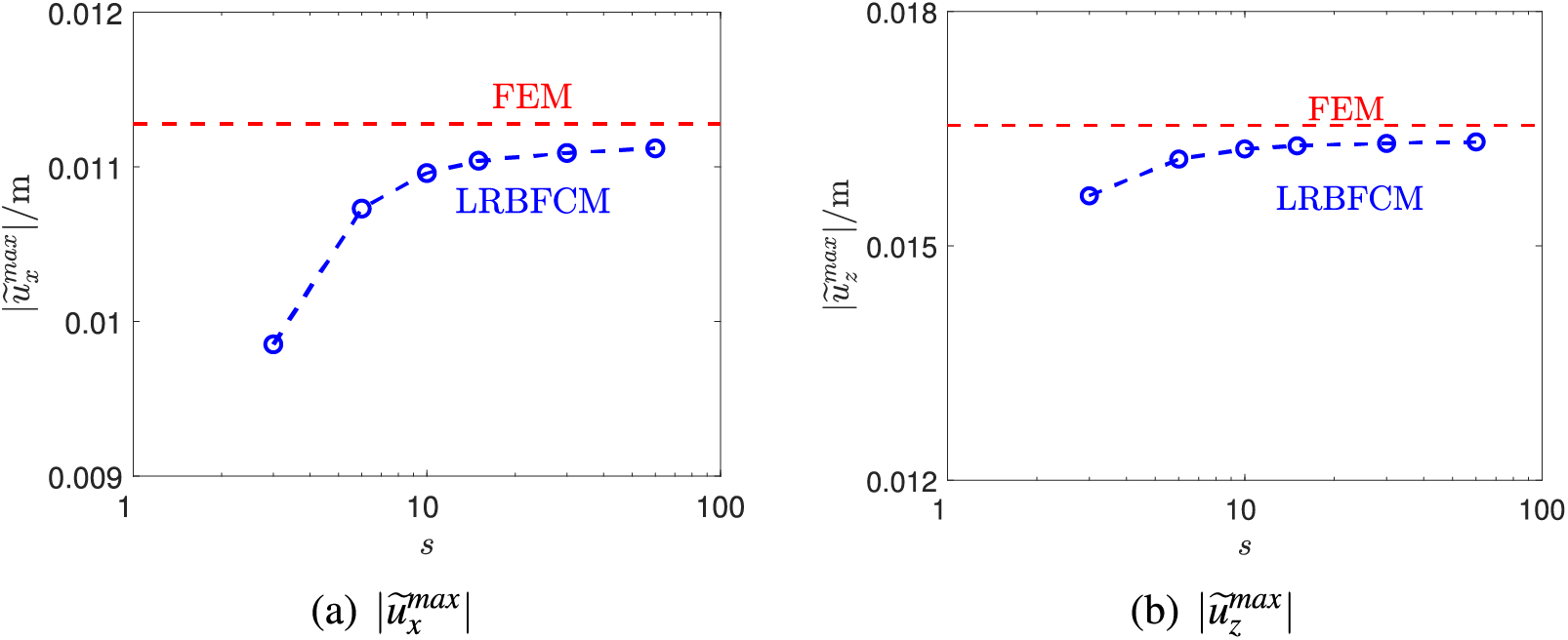
Figure 15: Displacement outcomes for various step numbers
A rock-socketed excavation is analyzed in this example. The displacement of the rock formation under the soil layer is not considered, and the support structure is fixed in the rock. As shown in Fig. 16, there are 30 m
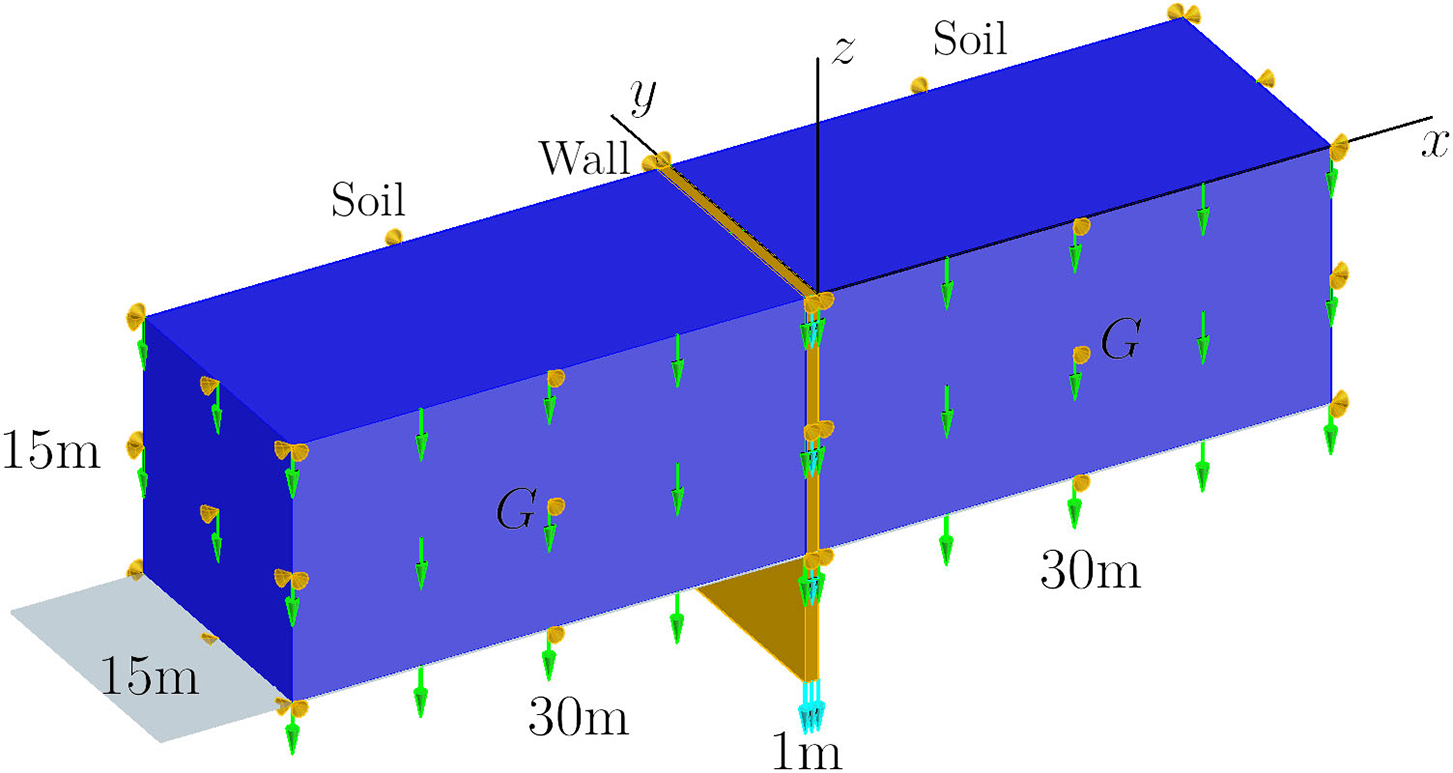
Figure 16: The prescribed mechanical state of Example 3
The excavation stress path can be categorized into three distinct stages, as illustrated in Fig. 17. The first stage is referred to as the geostatic equilibrium stage, which represents the soil deposition history. During this stage, the initial stresses of the structure reach equilibrate with the gravitational load of soil. However, the calculated deformations remain zero, since we are only concerned about the deformations after construction. The second stage is known as the support structure construction stage. The support wall is constructed and engages with the surrounding soil during this stage. The friction between the support structure and the soil is neglected, and the normal displacements of the contact surfaces are equal. The third stage, which is the one we are most concerned about, can be called the deformation stage. The passive soil located on the inner side of the excavation (
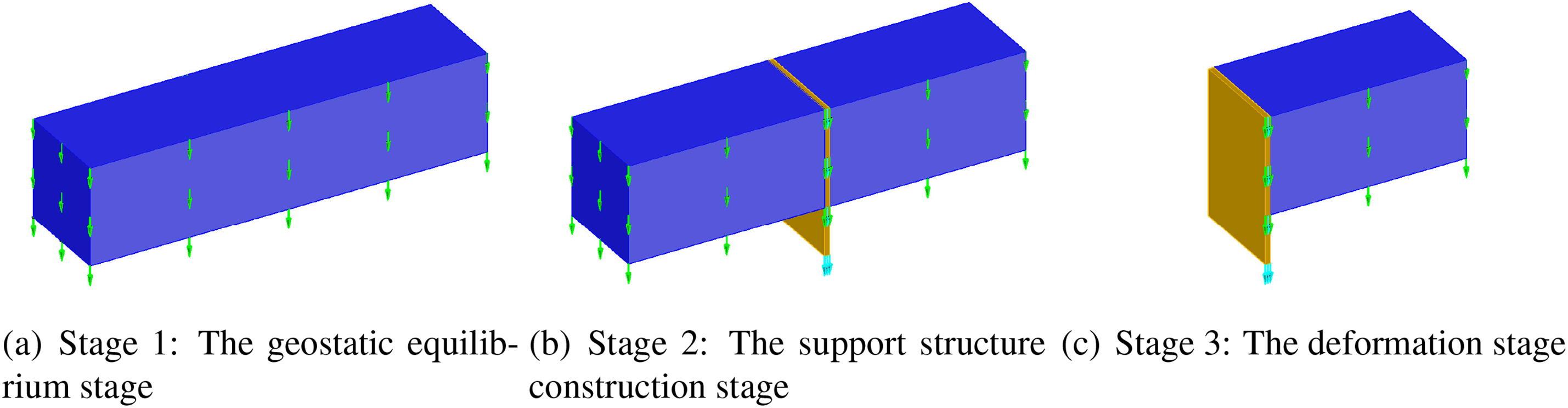
Figure 17: The stress path of excavation in Example 3
The final displacement solutions, as fielded through the FEM, are presented in Fig. 18 with
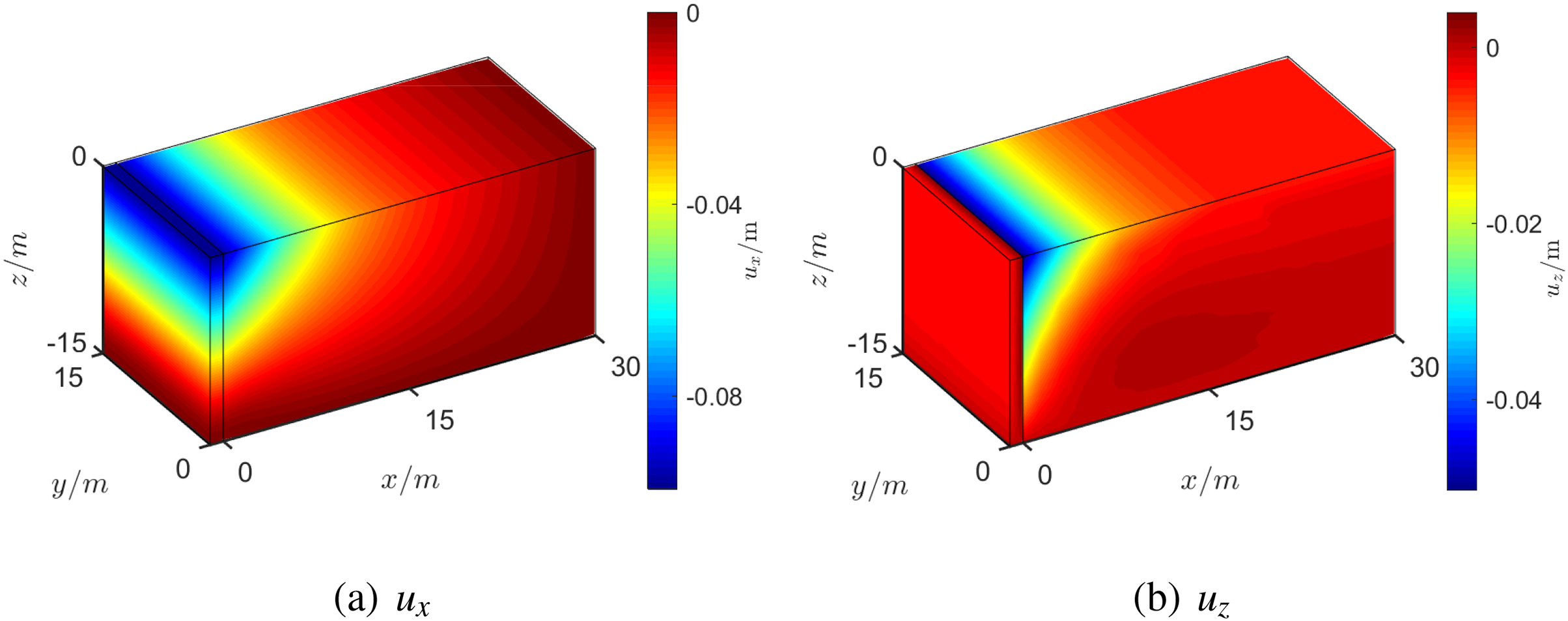
Figure 18: Displacement results of Example 3
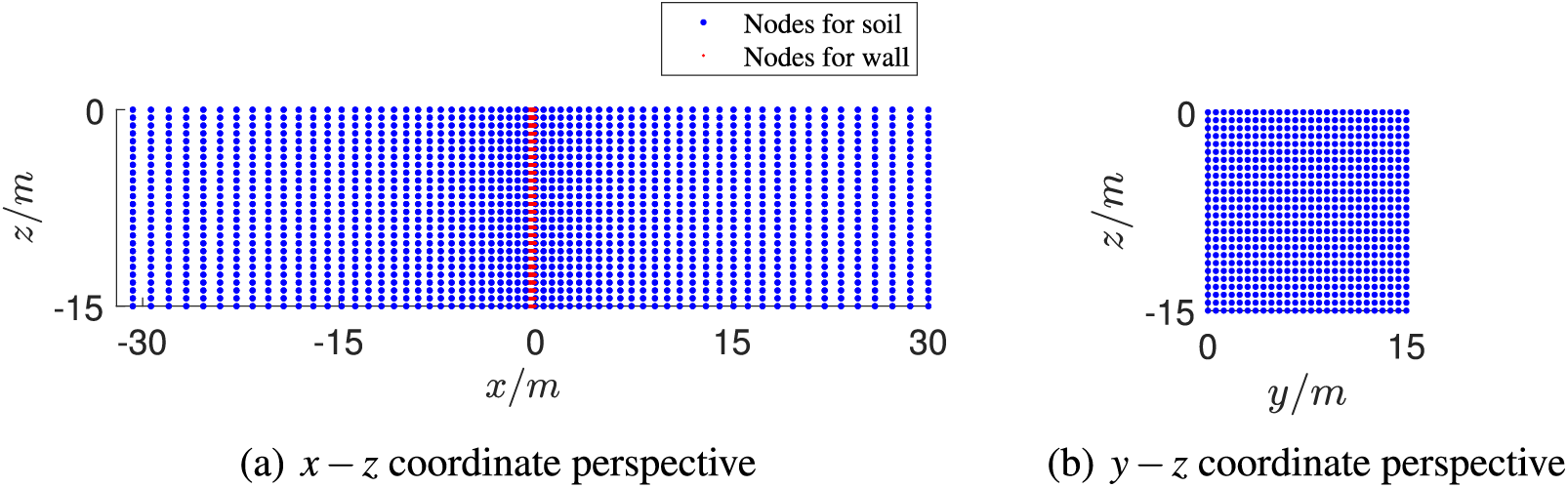
Figure 19: Node distribution for mapping technique

The work of applying the traditional LRBFCM in conjunction with the incremental method to solve similar excavation issues is also carried out. However, the results showed significant discretization. The reasons for this discretization are multifaceted: First, the large length-width ratio of the excavation support structure severely restricts the node distribution in the traditional LRBFCM, resulting in an unreasonable distribution of collocation points. Secondly, the presence of numerous first-order partial derivatives in the stress boundary conditions and governing equations makes it difficult to ensure accuracy. Furthermore, as verified in Example 1, the calculation accuracy of the traditional LRBFCM is quite sensitive to the shape parameter, which is difficult to determine. Therefore, Optimizing LRBFCM through the direct method is an essential step for simulating excavation deformation.
In this example, we analyze a 3D rock-socketed circular excavation with a radius of 49 m. Considering the symmetry, we examine a quarter of the circle. As shown in Fig. 20, the excavation is 30 m deep, and the support wall is 1 m wide. The initial boundary conditions are:
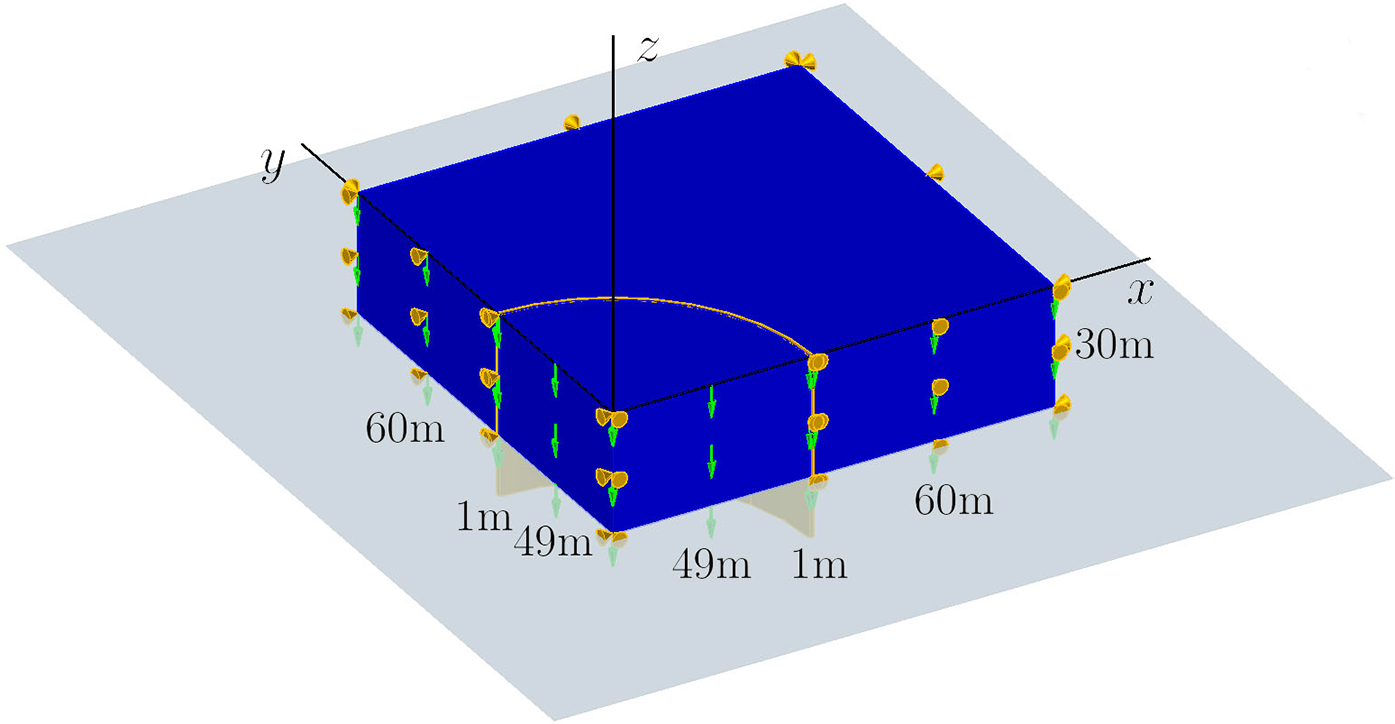
Figure 20: The prescribed mechanical state of Example 4
The friction between the soil and the support wall is ignored. Similarly to the previous example, the stress path consists of three stages (see Fig. 21). In the deformation stage, the passive soil within a radius of less than 49 m is excavated.
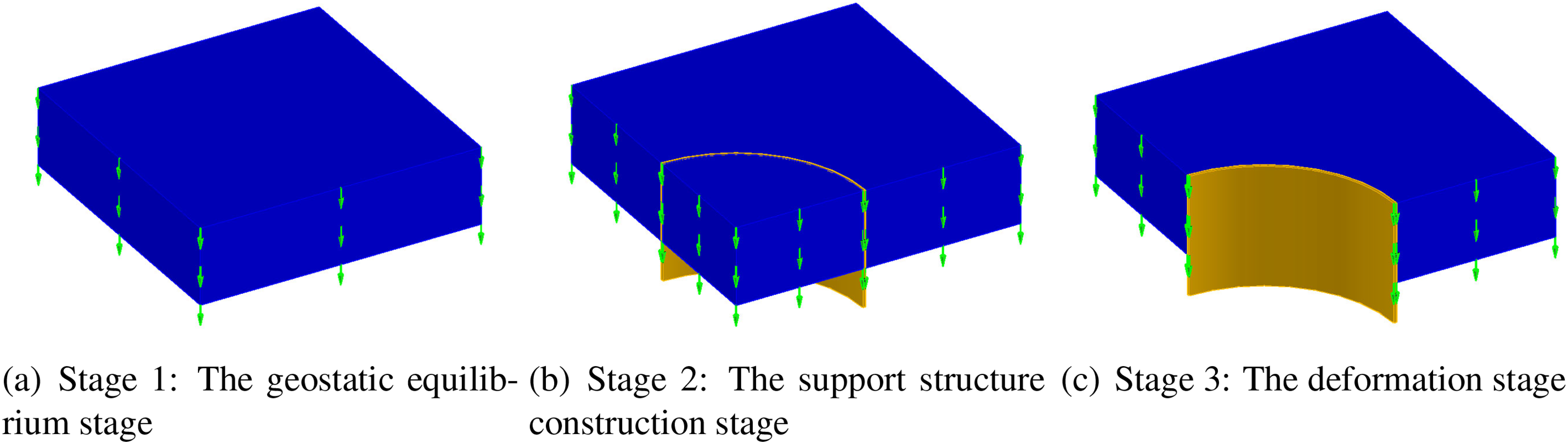
Figure 21: The stress path of excavation in Example 4
Considering the shape of the excavation, it needs to be divided into five blocks artificially, as shown in Fig. 22, for the mapping technique. The numbers in Fig. 22a represent the indices of the Blocks. In each block, an individual normalized coordinate system is constructed, and the collocation nodes are transformed to normalized nodes using the mapping seeds (the black
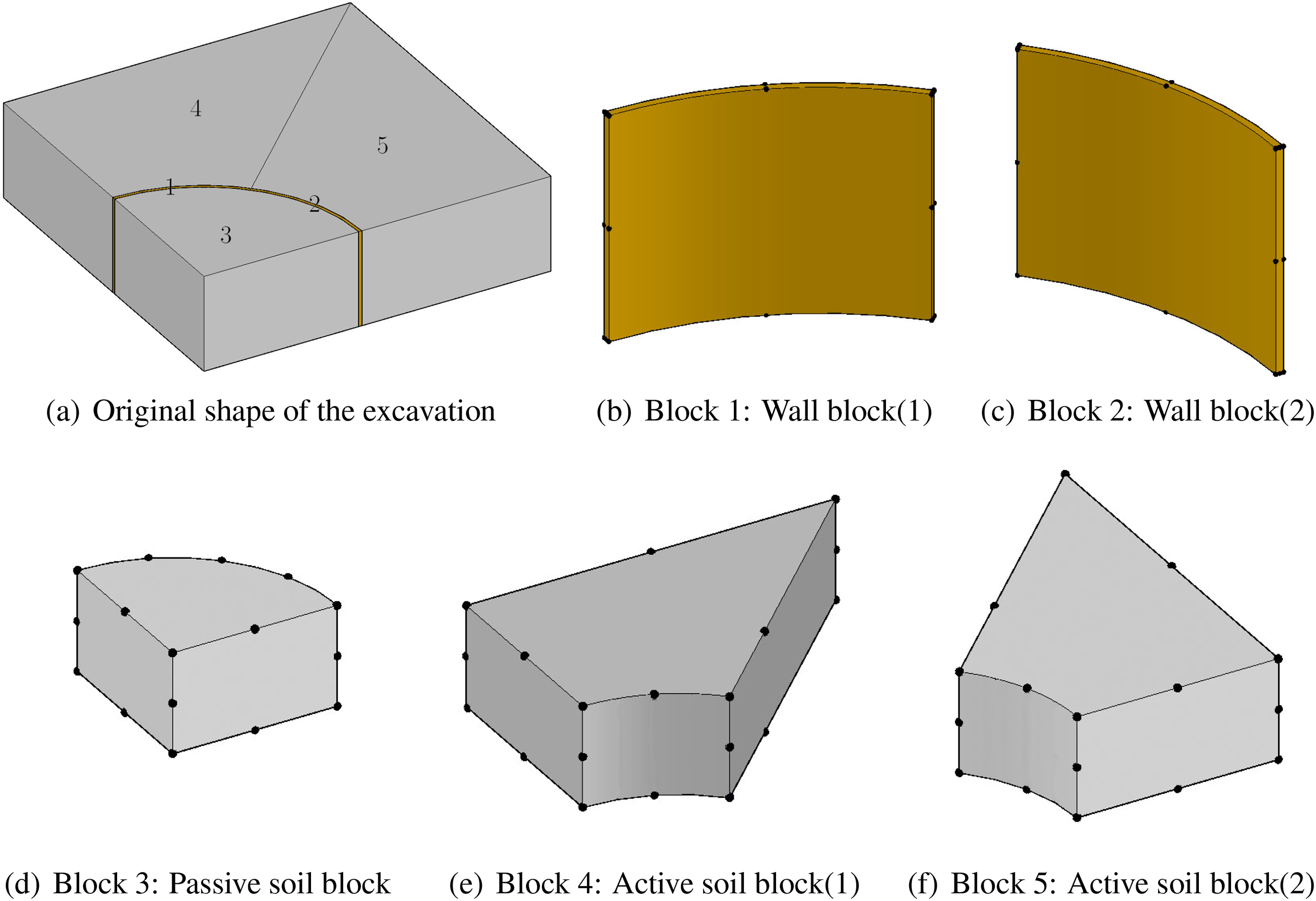
Figure 22: Dividing the excavation and collocating the mapping seeds
The final displacement solutions of FEM are shown in Fig. 23 with
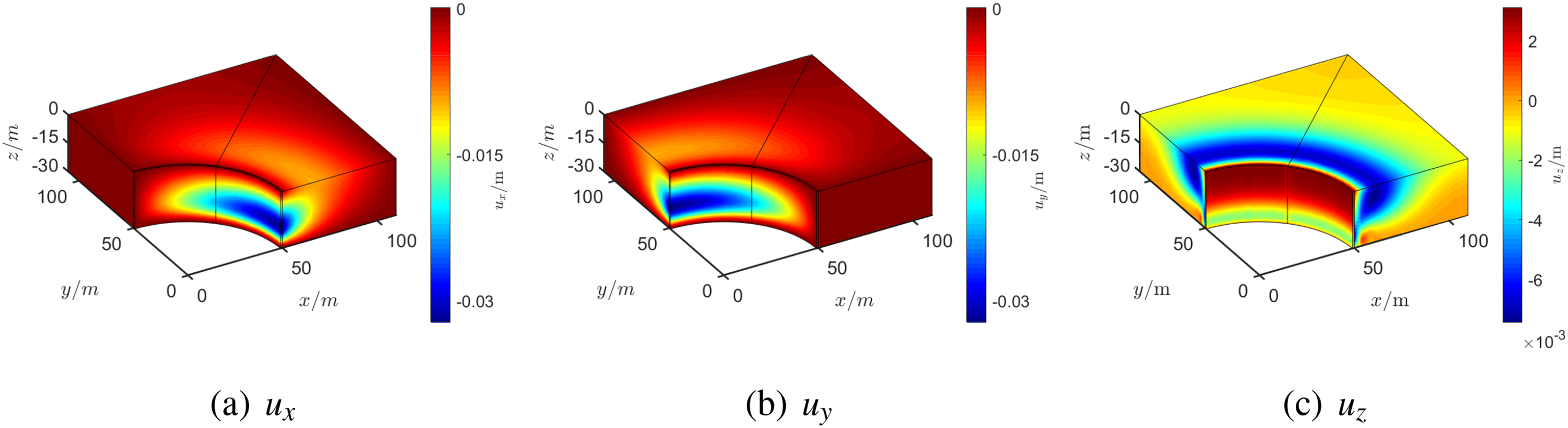
Figure 23: Displacement results of Example 4
For the proposed method, we consider


In the last example, a general circular excavation with a radius of 49 m is discussed. This model features an excavation within a 40 m deep soil region (see Fig. 24). The support wall has a thickness of 1 m, and the initial boundary conditions are as follows:
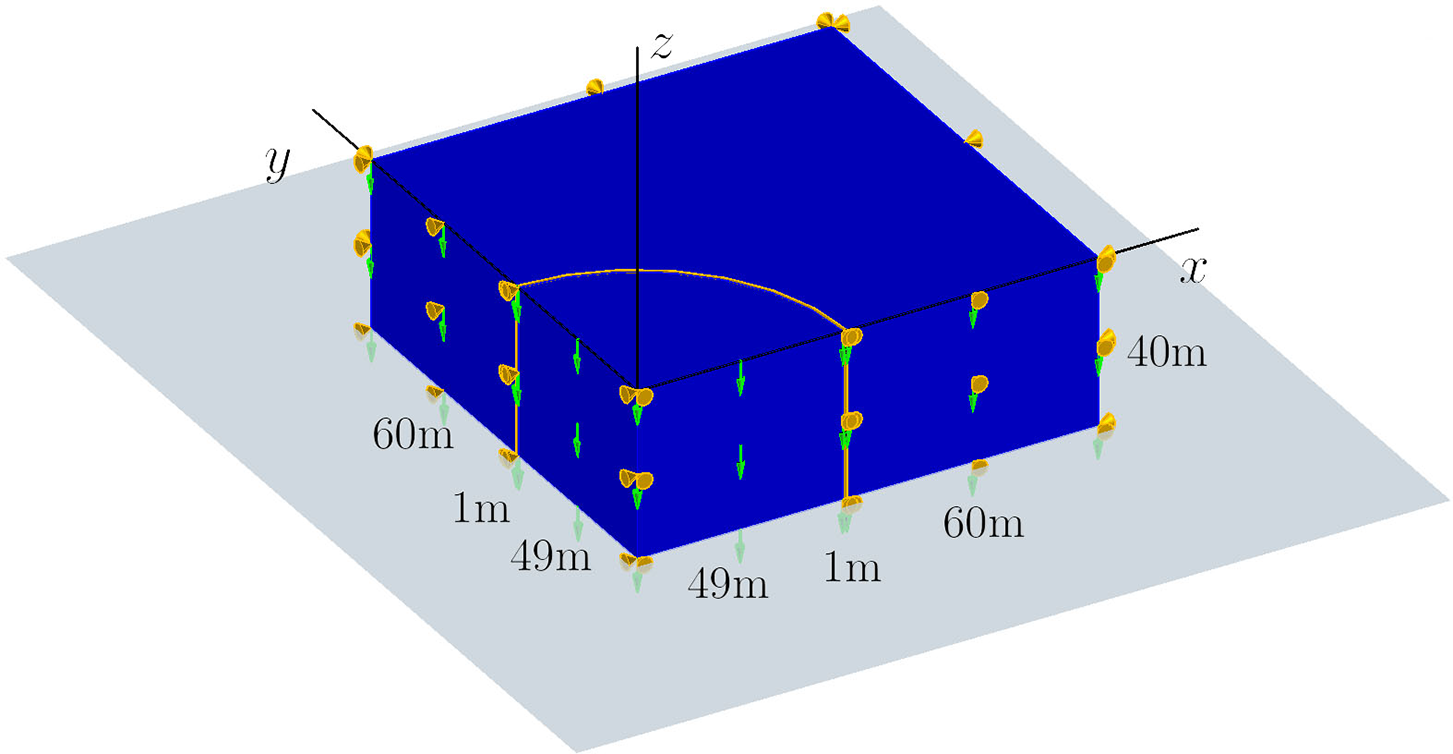
Figure 24: The prescribed initial boundary conditions for Example 5
We ignore the friction between the soil and the support wall. The stress path is also divided into three stages as shown in Fig. 25. During the deformation stage, the passive soil within
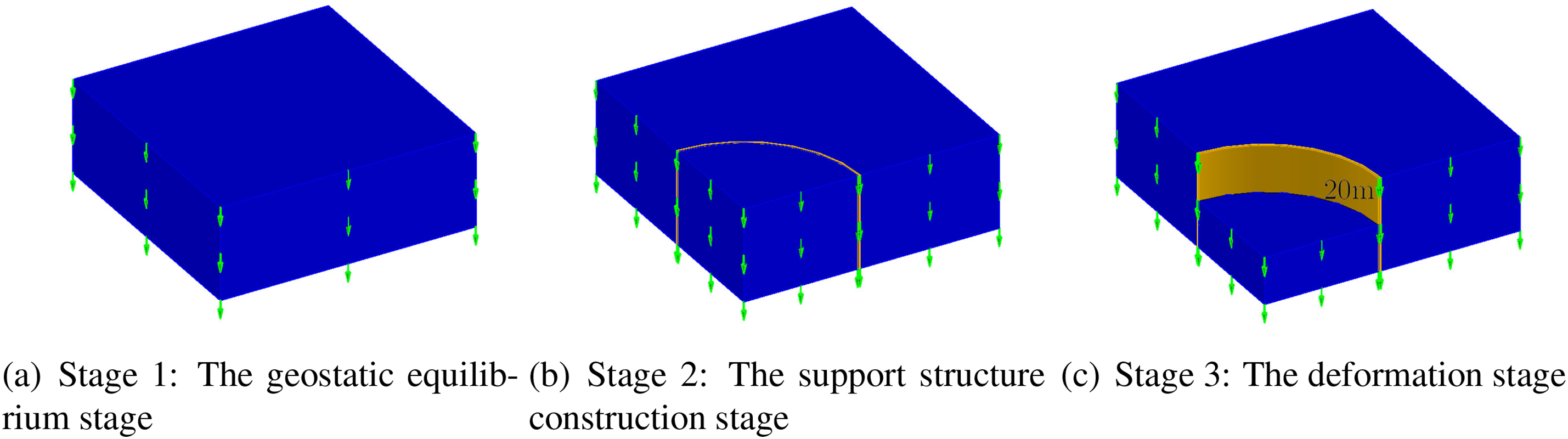
Figure 25: The stress path of excavation in Example 5
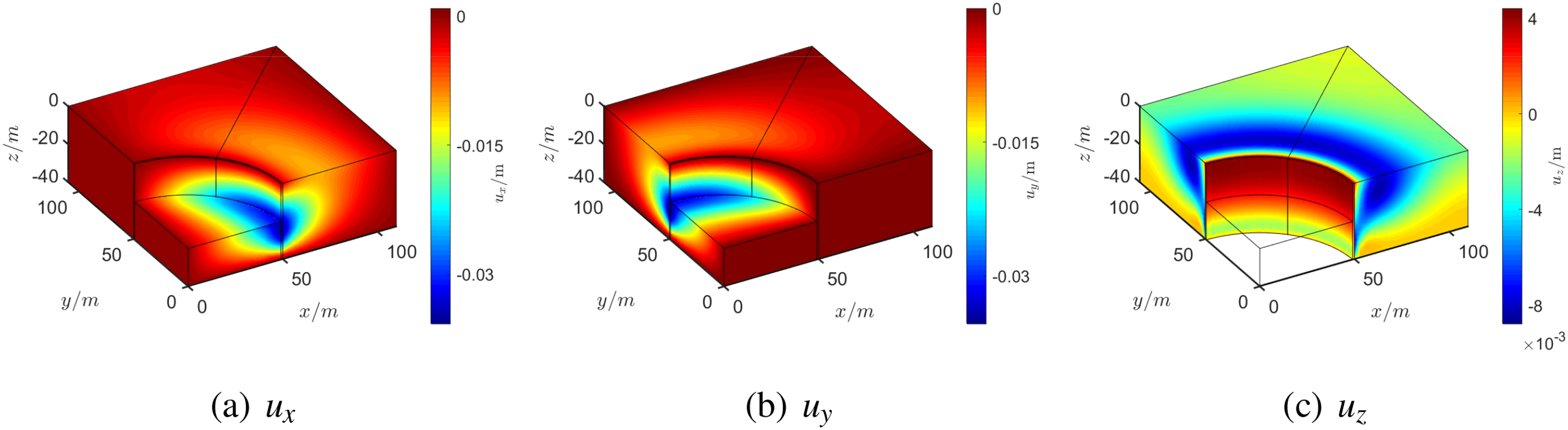
Figure 26: Displacement results of Example 5
Similarly to Example 4, the excavation shape is divided into five blocks artificially for the mapping technique, as shown in Fig. 27, where the indices of blocks are presented. We build an individual normalized coordinate system for each block. Tables 6 and 7 show the results of three different node arrays. Compared with the other examples, this problem is more complex, and the accuracy is slightly inferior but still acceptable. The results also show that a denser node array yields slightly better accuracy.
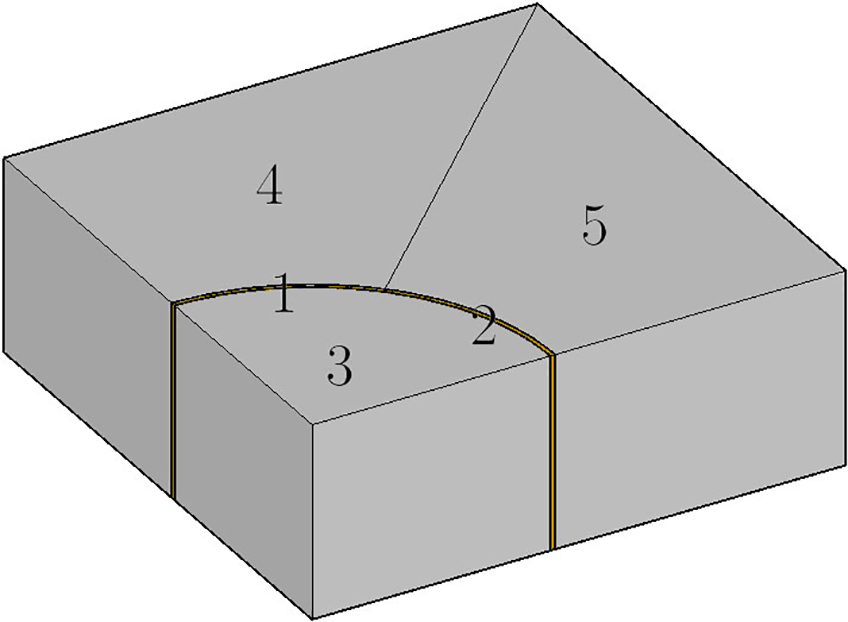
Figure 27: Dividing the excavation and the indices of blocks of Example 5


This paper extends the LRBFCM to the deformation analysis of deep excavation in 3D. The direct method, where the influence nodes are collocated on a straight line, is introduced to optimize the local nodes. The mapping technique is used to describe the irregular shape of excavation in 3D. The plasticity of soil in excavation is described by the D-P model, and the LRBFCM, using the incremental method, is applied to analyze the plasticity. The efficiency of modified LRBFCM is demonstrated through five examples. By using the proposed optimization methods, LRBFCM can effectively solve deep excavation problems. The following conclusions can be made:
1. The application of the direct method is crucial for simulating excavation deformation. By using the direct method, the accuracy of computing first-order partial derivatives is significantly improved. Additionally, the collocation node distribution can be adjusted flexibly, greatly enhancing the computational efficiency when solving significant length-width ratio problems. Moreover, the direct method is insensitive to the shape parameter, making the calculation more stable.
2. The shape of circular excavation can be described with several quadratic-type blocks, and the deformation results remain stable since the physical coordinates are transformed into a normalized coordinate system.
3. A suitable range of
4. Compared to the strip excavation, the plastic deformation of soil in a circular excavation is significantly reduced, and the position of maximum lateral deformation shifts from the top to the lower part of the wall.
Our current study exclusively addresses the problem of single-layer soil, and our future work will focus on multi-layer soils and inhomogeneous materials. Additionally, large deformation problems in geotechnical engineering may also be considered in future studies.
Acknowledgment: The authors would like to acknowledge China Scholarship Council (CSC) for its support on this study.
Funding Statement: The work was supported by grants from the National Natural Science Foundation of China (Nos. 12172159 and 12362019).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Cheng Deng, Liangyong Gong; data collection: Rongping Zhang, Mengqi Wang; analysis and interpretation of results: Cheng Deng, Hui Zheng, Liangyong Gong, Rongping Zhang; draft manuscript preparation: Cheng Deng, Hui Zheng, Mengqi Wang. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data presented in this study are available on request from the corresponding author.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Zhang J, Li M, Ke L, Yi J. Distributions of lateral earth pressure behind rock-socketed circular diaphragm walls considering radial deflection. Comput Geotech. 2022;143(4):104604. doi:10.1016/j.compgeo.2021.104604. [Google Scholar] [CrossRef]
2. Zhou X, Yuan Y, Leng Z, Gao X, Zeng C. Numerical study on the thermal-induced mechanical behavior in deep energy diaphragm wall (EDWthe long-term soil elastoplastic effects. Tunn Undergr Sp Tech. 2023;132:104860. doi:10.1016/j.tust.2022.104860. [Google Scholar] [CrossRef]
3. Lai VQ, Kounlavong K, Keawsawasvong S, Banyong R, Wipulanusat W, Jamsawang P. Undrained basal stability of braced circular excavations in anisotropic and non-homogeneous clays. Transp Geotech. 2023;39(2):100945. doi:10.1016/j.trgeo.2023.100945. [Google Scholar] [CrossRef]
4. Kumar J, Rahaman O. Lower bound limit analysis of unsupported vertical circular excavations in rocks using Hoek-Brown failure criterion. Int J Numer Anal Met. 2020;44(7):1093–106. doi:10.1002/nag.3051. [Google Scholar] [CrossRef]
5. Drucker DC, Prager W. Soil mechanics and plastic analysis or limit design. Q Appl Math. 1952;10(2):157–65. doi:10.1090/qam/48291. [Google Scholar] [CrossRef]
6. Zhu XH, Jia YJ. 3D mechanical modeling of soil orthogonal cutting under a single reamer cutter based on Drucker-Prager criterion. Tunn Undergr Sp Tech. 2014;41:255–62. doi:10.1016/j.tust.2013.12.008. [Google Scholar] [CrossRef]
7. He W, Luo C, Cui J, Zhang J. An axisymmetric BNEF method of circular excavations taking into account soil-structure interactions. Comput Geotech. 2017;90(11):155–63. doi:10.1016/j.compgeo.2017.06.001. [Google Scholar] [CrossRef]
8. Keawsawasvong S, Ukritchon B. Undrained basal stability of braced circular excavations in non-homogeneous clays with linear increase of strength with depth. Comput Geotech. 2019;115(2):103180. doi:10.1016/j.compgeo.2019.103180. [Google Scholar] [CrossRef]
9. Arai Y, Kusakabe O, Murata O, Konishi S. A numerical study on ground displacement and stress during and after the installation of deep circular diaphragm walls and soil excavation. Comput Geotech. 2008;35(5):791–807. doi:10.1016/j.compgeo.2007.11.001. [Google Scholar] [CrossRef]
10. Wang D, Bienen B, Nazem M, Tian Y, Zheng J, Pucker T, et al. Large deformation finite element analyses in geotechnical engineering. Comput Geotech. 2015;65(13):104–14. doi:10.1016/j.compgeo.2014.12.005. [Google Scholar] [CrossRef]
11. Zheng H, Yang Z, Zhang C, Tyrer M. A local radial basis function collocation method for band structure computation of phononic crystals with scatterers of arbitrary geometry. Appl Math Model. 2018;60(13):447–59. doi:10.1016/j.apm.2018.03.023. [Google Scholar] [CrossRef]
12. Cheng AHD, Hong Y. An overview of the method of fundamental solutions—Solvability, uniqueness, convergence, and stability. Eng Anal Bound Elem. 2020;120(5):118–52. doi:10.1016/j.enganabound.2020.08.013. [Google Scholar] [CrossRef]
13. Chen W, Tanaka M. A meshless, integration-free, and boundary-only RBF technique. Comput Math Appl. 2002;43(3):379–91. doi:10.1016/S0898-1221(01)00293-0. [Google Scholar] [CrossRef]
14. Wang F, Gu Y, Qu W, Zhang C. Localized boundary knot method and its application to large-scale acoustic problems. Comput Method Appl M. 2020;361:112729. doi:10.1016/j.cma.2019.112729. [Google Scholar] [CrossRef]
15. Gu Y, Lin J, Fan CM. Electroelastic analysis of two-dimensional piezoelectric structures by the localized method of fundamental solutions. Adv Appl Math Mech. 2023;15(4):880–900. doi:10.4208/aamm.OA-2021-0223. [Google Scholar] [CrossRef]
16. Sarler B, Vertnik R. Meshfree explicit local radial basis function collocation method for diffusion problems. Comput Math Appl. 2006;51(8):1269–82. doi:10.1016/j.camwa.2006.04.013. [Google Scholar] [CrossRef]
17. Vertnik R, Sarler B. Meshless local radial basis function collocation method for convective-diffusive solid-liquid phase change problems. Int J Numer Method Heat Fluid Flow. 2006;16(5):617–40. doi:10.1108/09615530610669148. [Google Scholar] [CrossRef]
18. Jiang P, Zheng H, Xiong J, Zhang C. A stabilized local RBF collocation method for incompressible Navier-Stokes equations. Comput Fluids. 2023;265(3):105988. doi:10.1016/j.compfluid.2023.105988. [Google Scholar] [CrossRef]
19. Tu W, Gu YT, Wen PH. Effective shear modulus approach for two dimensional solids and plate bending problems by meshless node collocation method. Eng Anal Bound Elem. 2012;36(5):675–84. doi:10.1016/j.enganabound.2011.11.016. [Google Scholar] [CrossRef]
20. Zhang S. Meshless symplectic and multi-symplectic local RBF collocation methods for nonlinear Schrodinger equation. J Comput Phys. 2022;450(2):110820. doi:10.1016/j.jcp.2021.110820. [Google Scholar] [CrossRef]
21. Xue Z, Wang L, Ren X, Wahab MA. Weighted radial basis collocation method for large deformation analysis of rubber-like materials. Eng Anal Boundary Elem. 2023;159:95–110. doi:10.1016/j.enganabound.2023.11.016. [Google Scholar] [CrossRef]
22. Chen C, Noorizadegan A, Young DL, Chen CS. On the selection of a better radial basis function and its shape parameter in interpolation problems. Appl Math Comput. 2023;442(1):127713. doi:10.1016/j.amc.2022.127713. [Google Scholar] [CrossRef]
23. Rippa S. An algorithm for selecting a good value for the parameter c in radial basis function interpolation. Adv Comput Math. 1999;11(2–3):193–210. doi:10.1023/A:1018975909870. [Google Scholar] [CrossRef]
24. Franke R. Scattered data interpolation: tests of some methods. Math Comput. 1982;38(157):181–200. doi:10.2307/2007474. [Google Scholar] [CrossRef]
25. Shi CS, Zheng H, Wen PH, Hon YC. The local radial basis function collocation method for elastic wave propagation analysis in 2D composite plate. Eng Anal Bound Elem. 2023;150(1–2):571–82. doi:10.1016/j.enganabound.2023.02.021. [Google Scholar] [CrossRef]
26. Xu Y, Li J, Chen X, Pang G. Solving fractional Laplacian Visco-acoustic wave equations on complex-geometry domains using Grunwald-formula based radial basis collocation method. Comput Math Appl. 2020;79(8):2153–67. doi:10.1016/j.camwa.2019.10.013. [Google Scholar] [CrossRef]
27. Wang D, Chen CS, Fan CM. The MAPS based on trigonometric basis functions for solving elliptic partial differential equations with variable coefficients and Cauchy-Navier equations. Math Comput Simulat. 2019;159(8/9):119–35. doi:10.1016/j.matcom.2018.11.001. [Google Scholar] [CrossRef]
28. Li M, Wen PH. Finite block method for transient heat conduction analysis in functionally graded media. Int J Numer Meth Eng. 2014;99(5):372–90. doi:10.1002/nme.4693. [Google Scholar] [CrossRef]
29. Wen PH, Cao P, Korakianitis T. Finite block method in elasticity. Eng Anal Bound Elem. 2014;46(4):116–25. doi:10.1016/j.enganabound.2014.05.006. [Google Scholar] [CrossRef]
30. Wen JC, Zhou YR, Zhang CG, Wen PH. Meshless variational method applied to fracture mechanics with functionally graded materials. Eng Anal Bound Elem. 2023;157(2):44–58. doi:10.1016/j.enganabound.2023.08.043. [Google Scholar] [CrossRef]
31. Wen JC, Zhou YR, Sladek J, Sladek V, Wen PH. Galerkin finite block method in solid mechanics. Comput Math Appl. 2024;155(2):66–79. doi:10.1016/j.camwa.2023.11.028. [Google Scholar] [CrossRef]
32. Owen DRJ, Hinton E. Finite elements in plasticity: theory and practice. Swansea, UK: Pineridge Press Limited; 1980. [Google Scholar]
33. Abbo AJ, Sloan SW. A smooth hyperbolic approximation to the Mohr-Coulomb yield criterion. Comput Struct. 1995;54(3):427–41. doi:10.1016/0045-7949(94)00339-5. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools