
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Feasibility of Using Optimal Control Theory and Training-Performance Model to Design Optimal Training Programs for Athletes
Institute of Applied Mechanics, College of Engineering, National Taiwan University, Taipei City, 106, Taiwan
* Corresponding Author: Che-Yu Lin. Email:
Computer Modeling in Engineering & Sciences 2025, 143(3), 2767-2783. https://doi.org/10.32604/cmes.2025.064459
Received 16 February 2025; Accepted 20 May 2025; Issue published 30 June 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In order to help athletes optimize their performances in competitions while prevent overtraining and the risk of overuse injuries, it is important to develop science-based strategies for optimally designing training programs. The purpose of the present study is to develop a novel method by the combined use of optimal control theory and a training-performance model for designing optimal training programs, with the hope of helping athletes achieve the best performance exactly on the competition day while properly manage training load during the training course for preventing overtraining. The training-performance model used in the proposed optimal control framework is a conceptual extension of the Banister impulse-response model that describes the dynamics of performance, training load (served as the control variable), fitness (the overall positive effects on performance), and fatigue (the overall negative effects on performance). The objective functional of the proposed optimal control framework is to maximize the fitness and minimize the fatigue on the competition day with the goal of maximizing the performance on the competition day while minimizing the cumulative training load during the training course. The Forward-Backward Sweep Method is used to solve the proposed optimal control framework to obtain the optimal solutions of performance, training load, fitness, and fatigue. The simulation results show that the performance on the competition day is higher while the cumulative training load during the training course is lower with using optimal control theory than those without, successfully showing the feasibility and benefits of using the proposed optimal control framework to design optimal training programs for helping athletes achieve the best performance exactly on the competition day while properly manage training load during the training course for preventing overtraining. The present feasibility study lays the foundation of the combined use of optimal control theory and training-performance models to design personalized optimal training programs in real applications in athletic training and sports science for helping athletes achieve the best performances in competitions while prevent overtraining and the risk of overuse injuries.Keywords
Supplementary Material
Supplementary Material FileThe main goal of athletic training planning is to help athletes achieve the best performances in competitions [1]. One of the most important responsibilities of coaches and trainers is to design optimal training programs to help athletes reach this goal. Though this goal is clear and straightforward, its execution in practice is often far from optimal. Traditionally, coaches and trainers primarily rely on their subjective opinions, experiences, as well as trials and errors, but rely relatively little on scientific evidence and analyses for designing training programs [2,3]. It is conceivable that this traditional philosophy of designing training programs could not guarantee to help athletes reach their most important goal, i.e., having optimal physical fitness and achieving the best performance on the competition day. In order to help athletes optimize their performances in competitions while prevent overtraining and the risk of overuse injuries, it is important to develop science-based strategies for optimally designing training programs.
The relationship between training and athletic performance is multi-factorial, and therefore is a complex problem [4]. For the sake of better understanding the relationship between training and performance with the goal of helping athletes optimize their performances, scientists have developed mathematical models of training and performance (termed “training-performance models” in the following content) [1,3–6]. Training-performance models provide a science-based, quantitative method for understanding the effects of training on performance and the relationship between training and performance, as well as predicting an athlete’s performance over time during the training course and on the competition day. Since the introduction of the Banister impulse-response (IR) model (the earliest proposed training-performance model) [7,8], a number of training-performance models modified from the Banister IR model have been subsequently proposed [9–13]. One of the main advantages of training-performance models is that they can be applied to design training programs for an individual, since the model input is the data collected from an individual and therefore the model output is specific to that individual [3]. Given a hypothetical training program (i.e., daily training loads during the training course) and the model parameters determined from an individual as the inputs of the model, a training-performance model could quantitatively describe and predict an athlete’s performance over time during the training course and on the competition day based on this hypothetical training program, and thereby evaluate the optimality and efficacy of this hypothetical training program for this individual.
Traditionally, in the applications of using training-performance models to design optimal training programs, researchers resort to successive simulations based on a trial-and-error procedure [3,4]. Successive simulations are conducted by designing many different hypothetical training programs and inputting them into the model one by one. For each hypothetical training program, the performance on the competition day is predicted by solving the model. Then, among the designed hypothetical training programs, the one that generates the highest performance can be found. However, it can be understood that the theoretical optimal training program that generates the best performance for an individual could not be easily found by using this trial-and-error simulation procedure. Nowadays, data science and data-driven techniques have advanced rapidly, and these kinds of methods could allow more accurate and efficient assessment, and thereby more successful optimization of athletic performance. For example, Imbach et al. proposed that the combined use of machine learning techniques and training-performance models could improve and broaden the applications of training-performance models for athletic performance modeling [4]. Couceiro et al. proposed an ecological dynamics framework capable of merging a large amount of data into a smaller set of variables that results in a deeper and easier analysis, in order to allow sports scientists and practitioners to interpret data of athletes’ behaviors during training and competition in real-time for helping improve athletic performance [14]. Den Hartigh et al. proposed a multidisciplinary, dynamic and personalized approach applying knowledge and techniques of data science to improve the resilience of athletes [15].
Optimal control theory [16–20] is a powerful mathematical framework that aims to determine the optimal strategy to optimize a given objective functional for a dynamical system [21–23]. Optimal control theory has been applied in numerous fields, including agriculture [24–27], biology and medicine [28–31], economics and management [32–35] and engineering [36–39], to name a few. To the best of our knowledge, optimal control theory has not been applied to the fields of sports sciences and athletic training, and we believe that the combined use of optimal control theory and training-performance models could be a promising method for designing optimal training programs for helping athletes achieve the best performances in competitions more efficiently.
The purpose of the present study is to develop a novel method by the combined use of optimal control theory and a training-performance model for designing optimal training programs, in order to help athletes achieve the best performance exactly on the competition day while properly manage training load during the training course for preventing overtraining.
2.1 Background of the Training-Performance Model Used in the Proposed Optimal Control Framework
The purpose of this subsection is to introduce how the training-performance model used in the proposed optimal control framework is conceptually formulated. Since the training-performance model used in the proposed optimal control framework is a conceptual extension of the Banister IR model as will be explained below, the Banister IR model and some relevant background knowledge will be introduced in advance to lay the foundation for better understanding the essence of the training-performance model used in the proposed optimal control framework and how it is conceptually formulated.
In 1975, Banister and colleagues [7] posited that the response of athletic performance to training follows a first-order dynamical model of the form
where
During the training course, performance can increase or decrease due to the effects of a number of factors (including regulation of training load). Hence, performance can be assumed to be the difference between the overall positive effects on performance (termed “fitness”) and the overall negative effects on performance (termed “fatigue”) plus the performance on the initial day [8], i.e.,
If each of fitness and fatigue is assumed to follow the dynamical model of the form as Eq. (1), i.e.,
and
where
2.2 Formulation and Solution Methods of the Proposed Optimal Control Framework
In this subsection, we introduce the proposed optimal control framework and its solution methods. In the proposed optimal control framework, we use Eq. (2) as the training-performance model to describe the dynamics of performance, fitness, fatigue, and training load. The goal of the proposed optimal control framework is to maximize the fitness and minimize the fatigue on the competition day in order to maximize the performance on the competition day while minimize the cumulative training load during the training course. In the context of maintaining or even improving performance, minimize the cumulative training load during the training course can help an athlete prevent excessive training and fatigue that could lead to the reduction of performance and the increased risk of sports injuries. Hence, the proper management of the training load can help an athlete maintain the optimal physical and psychological conditions and minimize the likelihood of sports injuries. In addition, if an athlete can achieve the same (or even higher) performance with less training load, the athlete can have more time and energy for resting and activities other than training, therefore can have a better quality of life.
Hence, the objective functional of the proposed optimal control framework is
where
Combining Eqs. (2) and (3), the proposed optimal control framework is formulated as
subject to
where
It is important to note that, although training load is mathematically treated as a piecewise continuous function of time in the proposed optimal control framework, a bar plot is used to plot training load [3] in the figures for emphasizing that in reality an athlete performs training of a finite amount of training load per day; the training during the training course in the real world is not continuous or piecewise continuous, since an athlete would not train non-stop all day/week/month/year long.
To solve the proposed optimal control framework, we begin by forming the Hamiltonian
From the Hamiltonian, the necessary conditions can be obtained as
where
Solving Eqs. (5), (6) and (10)–(12) simultaneously, the optimal
The Forward-Backward Sweep Method [40–43] is used to solve Eqs. (5), (6) and (10)–(12) simultaneously. The details of the Forward-Backward Sweep Method can be found in the book [44], and the steps of this algorithm is outlined below. First, making an initial guess for the control variable
In all simulations, the initial conditions of performance, fitness and fatigue are all set as zero, i.e.,
In the simulation experiment without using optimal control theory,
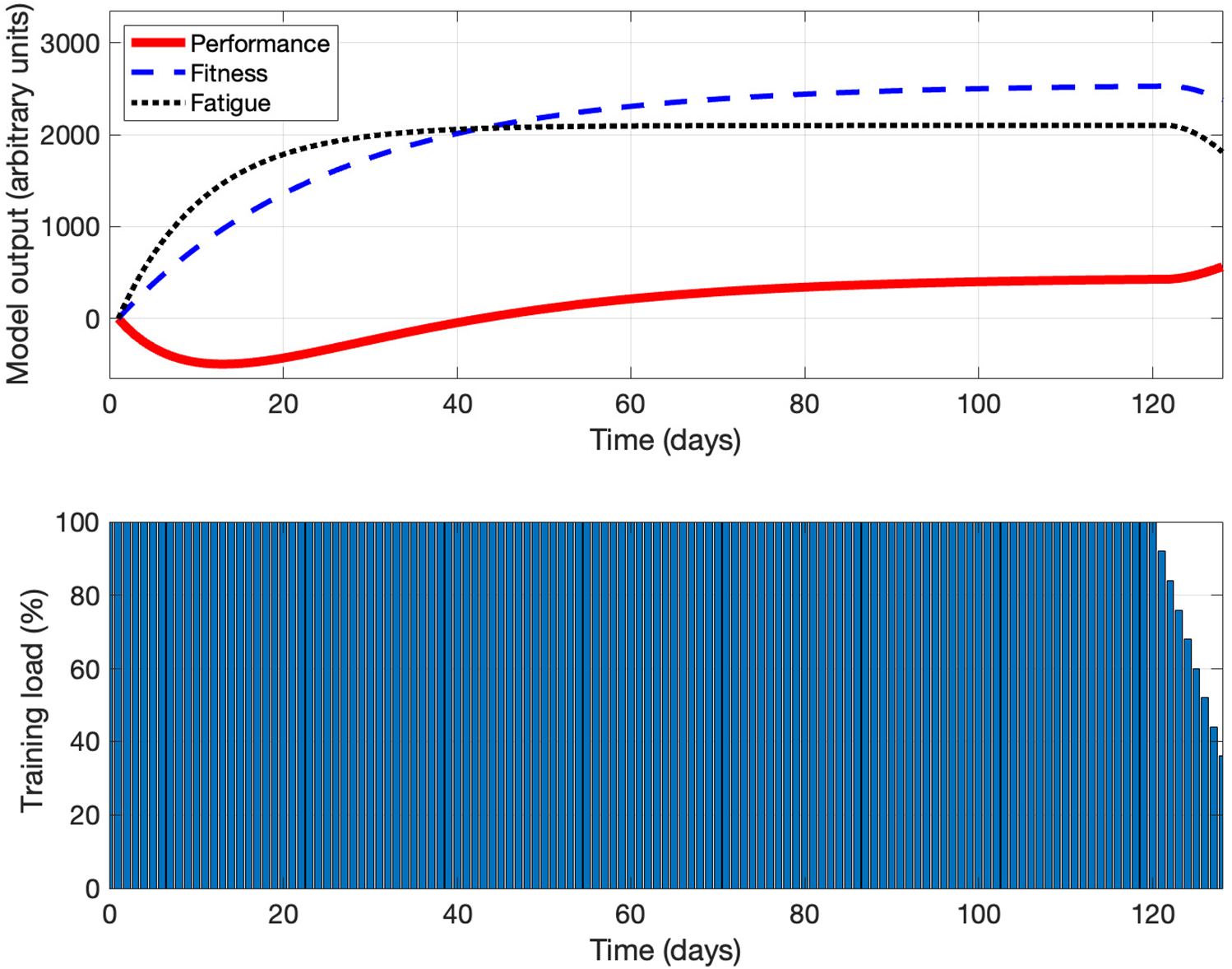
Figure 1: The simulation results without using optimal control theory
In the three simulation experiments with using optimal control theory,
To understand whether the proposed optimal control framework can design an optimal training program that can maximize the performance on the competition day and minimize the cumulative training load during the training course, we descriptively compare these two metrics generated by training programs with and without using optimal control theory.
Fig. 1 shows the simulation results without using optimal control theory. From this figure, we can understand how performance, fitness, fatigue and training load change over time during the training course until the competition day, and understand the relationship between these variables. It can be observed that, in the early stages of training, performance decreases since fatigue outweighs fitness; it is probably because the athlete just begins to adapt to training, therefore fatigue increases significantly. As training progresses, fitness continues to increase significantly while fatigue just increases slightly, leading to improved performance. Most notably, as the training load starts to decrease after the 120th day, performance starts to improve significantly, suggesting that reducing the training load at a certain time during the training course before the competition day could be beneficial for improving performance.
Fig. 2 shows the simulation results with using optimal control theory with
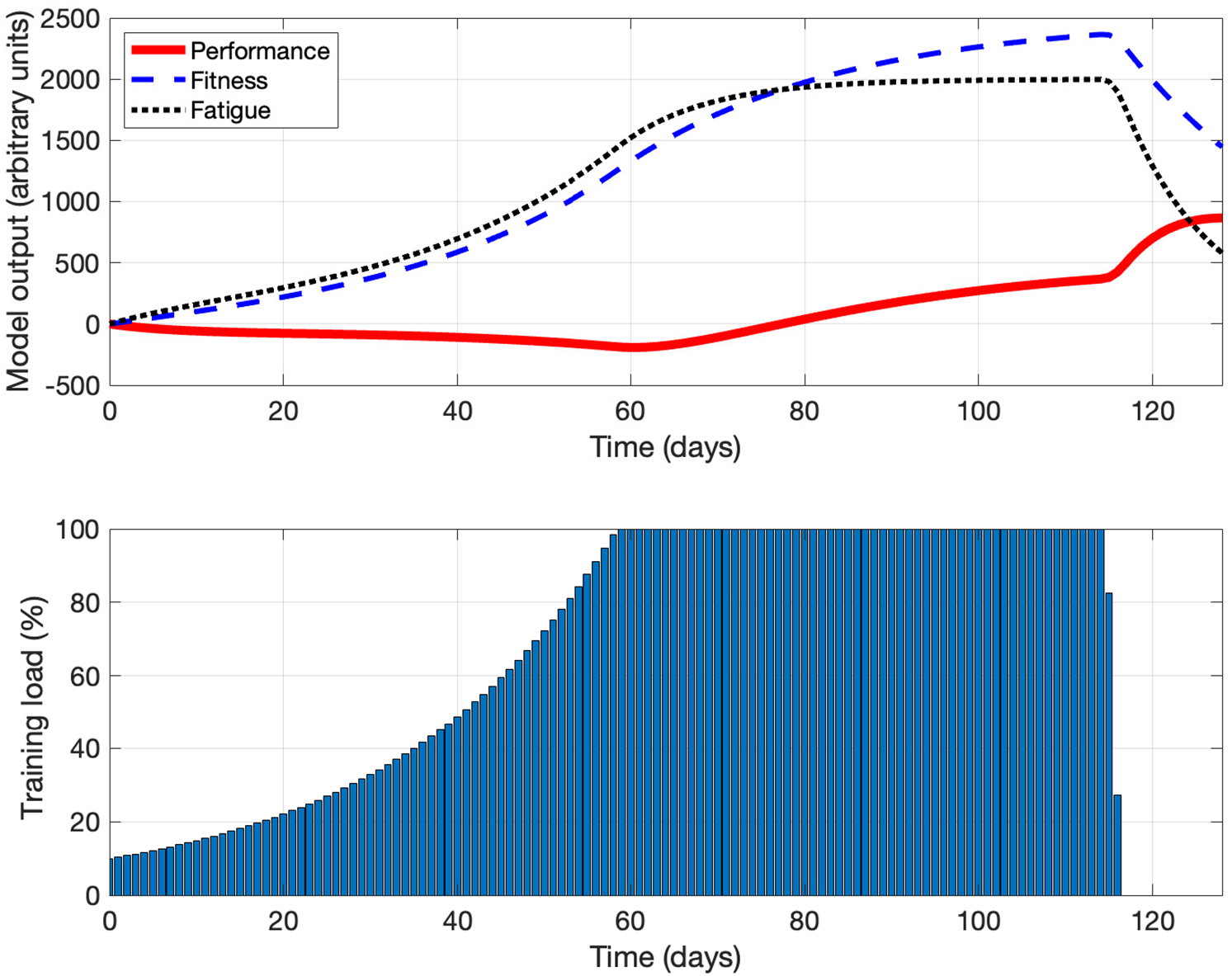
Figure 2: The simulation results using optimal control theory with
The results of Figs. 1 and 2 provide an important clue that strategically reducing the training load at a certain time during the training course could be beneficial to improve performance significantly. It suggests that, the focus of an optimal training program should not always be on pushing an athlete to train more and harder, but should be on helping an athlete seek an optimal balance between training and recovery; an optimal training program should carefully consider both the intensity of training and an athlete’s ability and need for recovery to optimize performance effectively.
Figs. 3 and 4 show the results of the simulation experiments using optimal control theory with
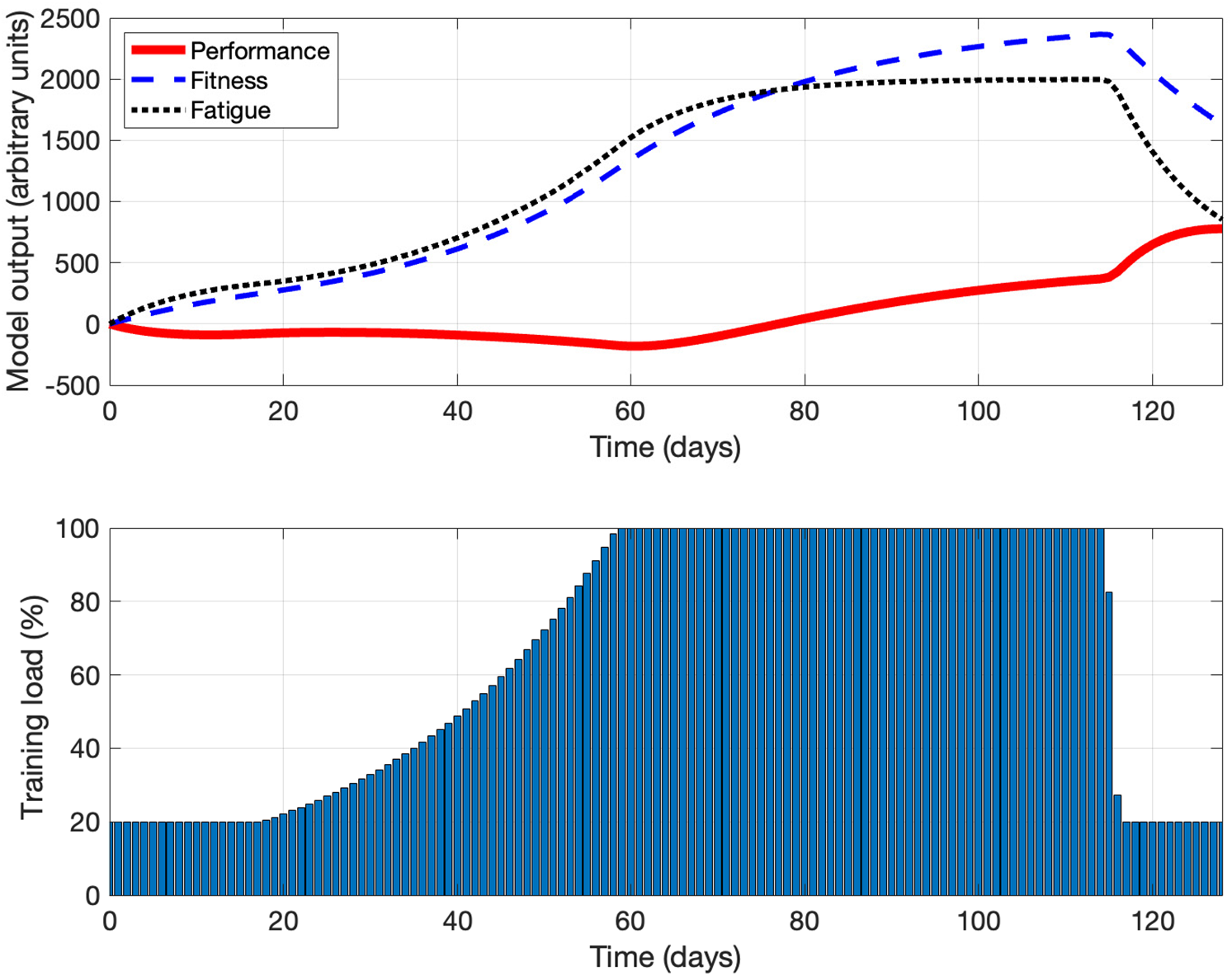
Figure 3: The simulation results using optimal control theory with
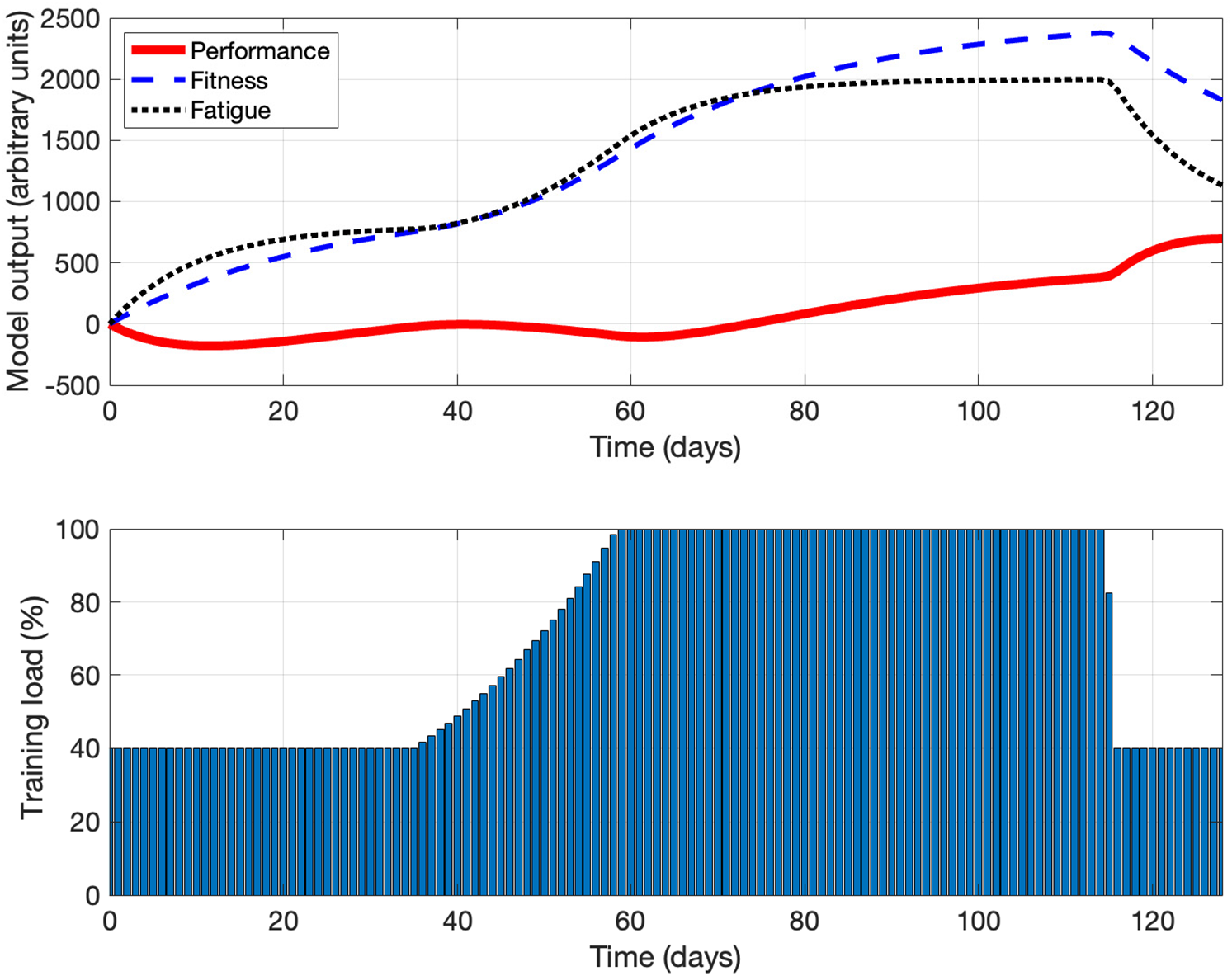
Figure 4: The simulation results using optimal control theory with
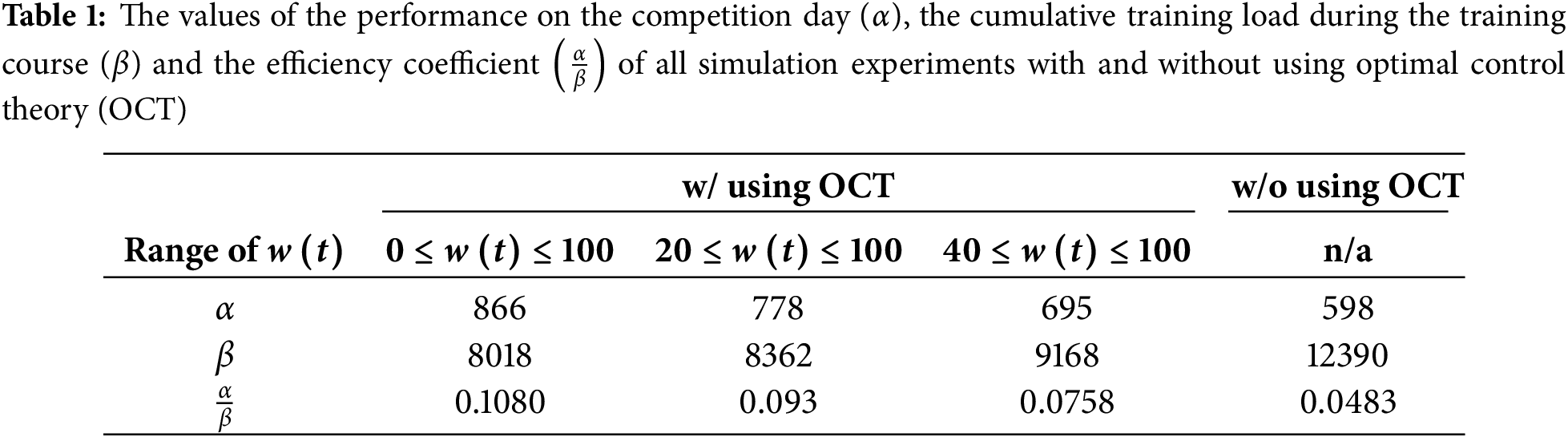
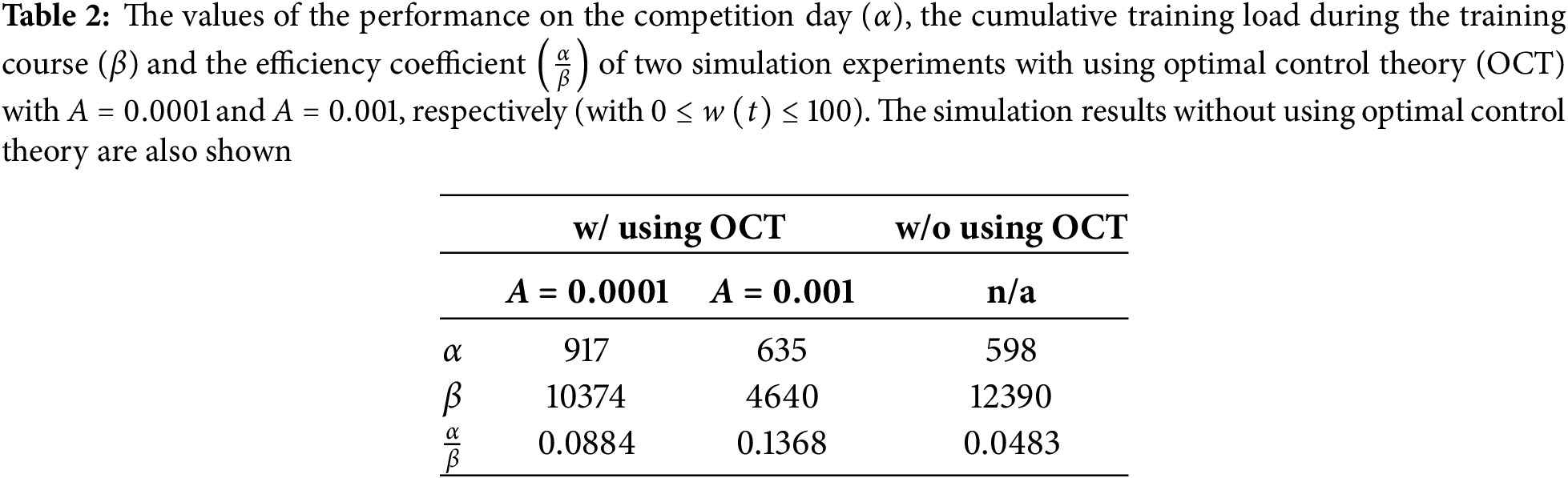
The values of the performance on the competition day and the cumulative training load during the training course of all simulation experiments are summarized in Table 1. It can be observed that, in each experiment with using optimal control theory, the performance on the competition day is higher while the cumulative training load during the training course is lower than those in the experiment without using optimal control theory, showing the feasibility and benefits of using the proposed optimal control framework to design optimal training programs for helping athletes achieve the best performance exactly on the competition day while properly manage training load during the training course for preventing overtraining. If the efficiency coefficient is defined as the performance on the competition day over the cumulative training load during the training course as shown in Table 1, it can be observed that the experiment with using optimal control theory with
The simulation results show that the performance on the competition day with using optimal control theory (with
It is important to discuss the effects and practical implications of the parameter
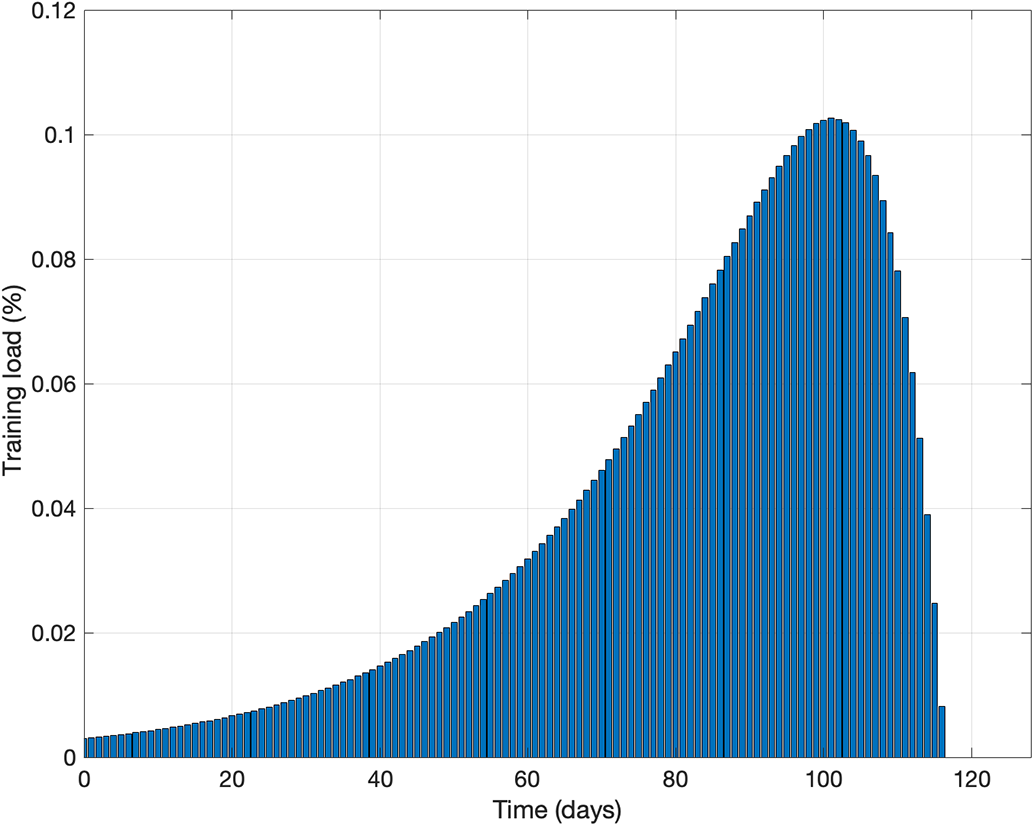
Figure 5: Illustration of a
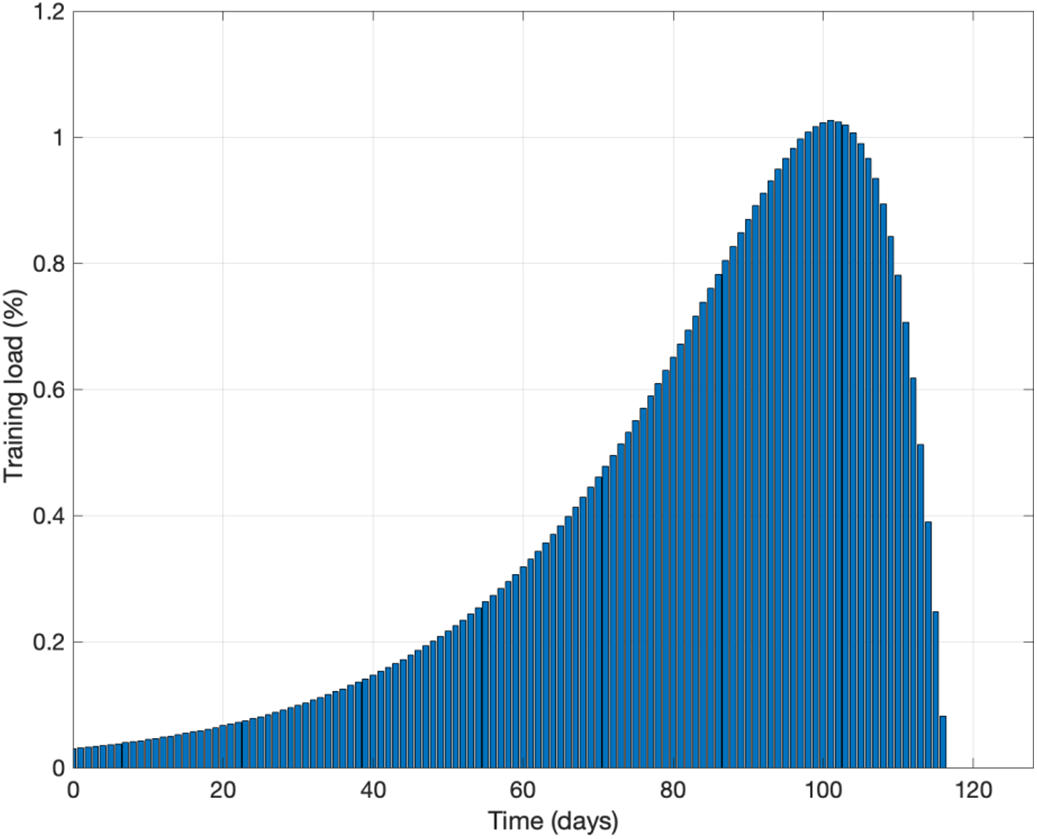
Figure 6: Illustration of a
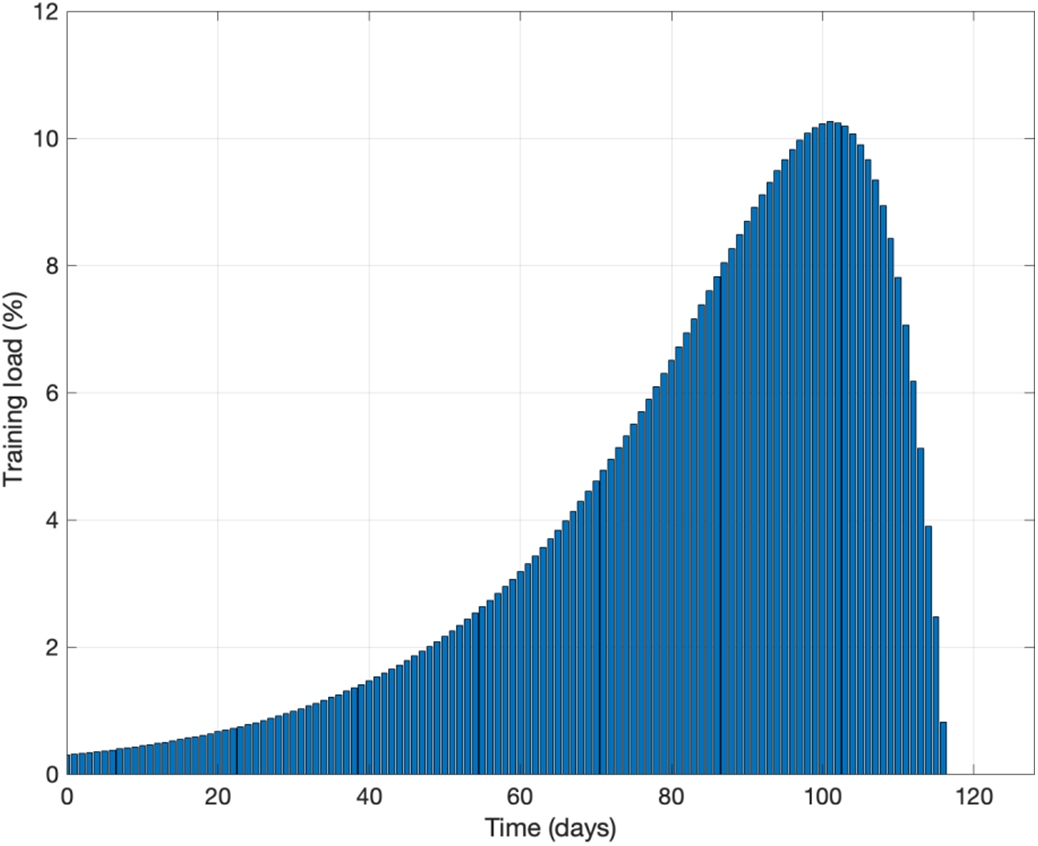
Figure 7: Illustration of a
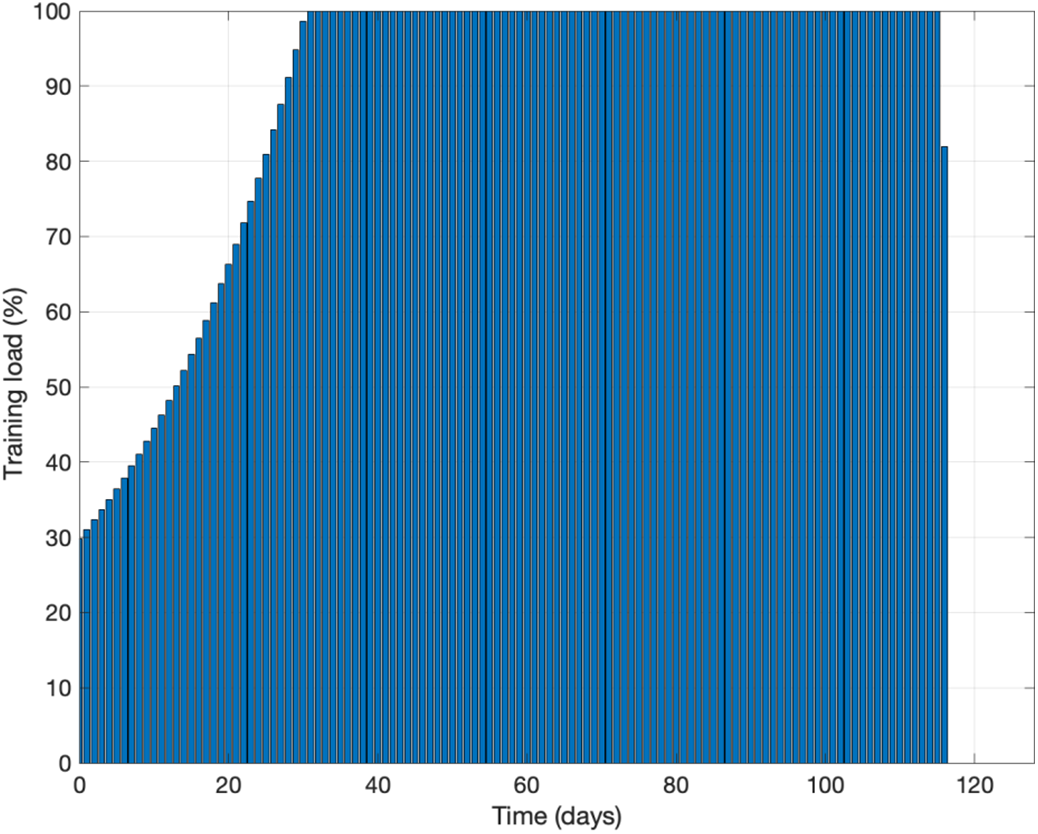
Figure 8: Illustration of a
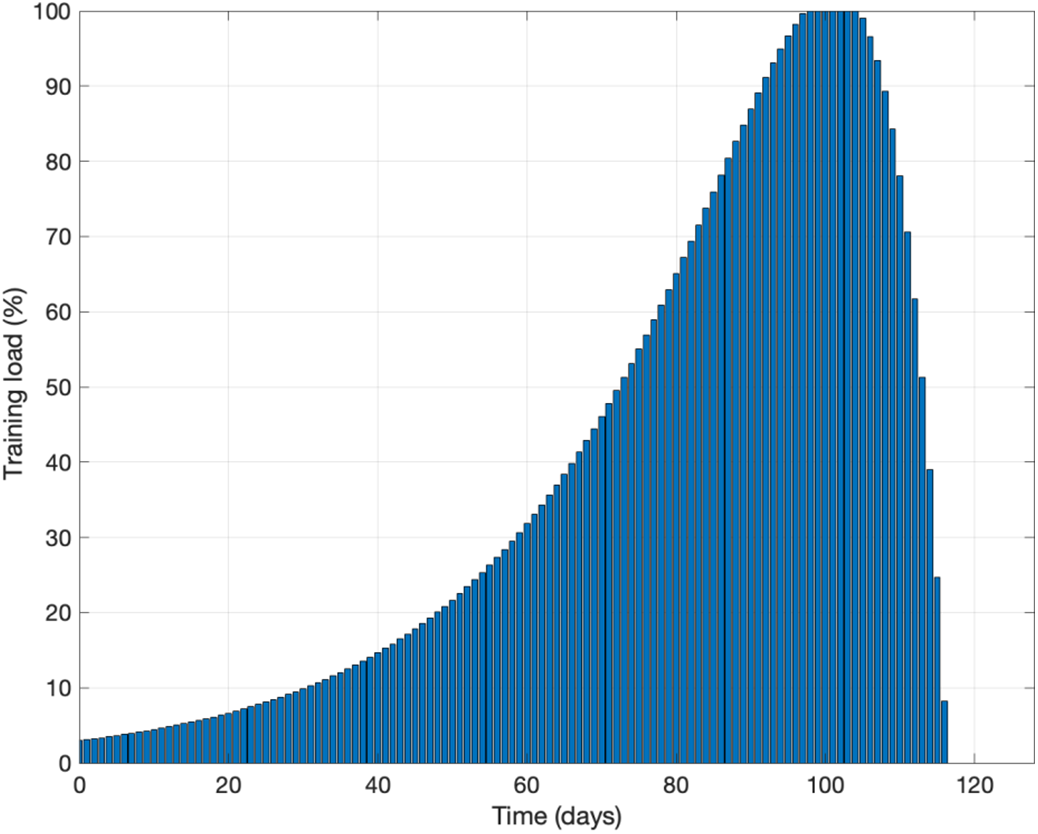
Figure 9: Illustration of a
The main limitations of the present study are related to the assumptions of the training-performance model, i.e., Eq. (2), used in the proposed optimal control framework. First, this model is an empirical (or say phenomenological) model formulated based on empirical concepts and observations, but not a mechanistic model that takes underlying mechanisms into account; in other words, this model only considers the overall positive and negative effects on performance (i.e., fitness and fatigue in the model, respectively), but does not consider the individual effect of every possible factor that could affect performance. Second, in this model, the dynamical response of fitness or fatigue that contributes to the change of performance is assumed to be a first-order linear differential equation, but this mathematical form could be too simple to accurately describe the complicated relationship between training and performance; to address this issue, several modified models based on the original Banister IR model with more elaborate mathematical forms have subsequently been proposed to improve the descriptive and predictive abilities of the models [9–13]. Third, this model does not consider physiological adaptions to training; that is, the coefficients (i.e.,
To the best of our knowledge, it is the first study that intends to develop a novel method by the combined use of optimal control theory and a training-performance model for designing optimal training programs that can be served as references for coaches, trainers and athletes to design training programs, to help athletes achieve the best performance exactly on the competition day while properly manage training load during the training course for preventing overtraining. Specifically speaking, the function of the proposed optimal control framework is to, based on the physiological characteristics of an athlete and the personal goals, design an optimal training program that indicates the ideal magnitude of training load on each day during the training course until the competition day. Coaches, trainers, and the athlete can then refer to this optimal suggestion to design the daily training load of a training program to help the athlete achieve the best performance exactly on the competition day while properly manage training load during the training course to prevent overtraining. The simulation results show that the performance on the competition day is higher while the cumulative training load during the training course is lower with using optimal control theory than those without, successfully showing the feasibility and benefits of using the proposed optimal control framework to design optimal training programs for helping athletes achieve the best performance exactly on the competition day while properly manage training load during the training course for preventing overtraining. In addition, an optimal training program designed by the proposed optimal control framework can be personalized to match the physiological characteristics and personal goals of an athlete; therefore, the proposed optimal control framework is flexible, could work well for different athletes with different physiological characteristics and personal goals. The present feasibility study lays the foundation of the combined use of optimal control theory and training-performance models to design personalized optimal training programs in real applications in athletic training and sports science for helping athletes achieve the best performances in competitions while prevent overtraining and the risk of overuse injuries. The main limitation of the present study is that the training-performance model adopted to formulate the optimal control framework could be too simple to accurately and realistically describe the dynamics of performance and training load. In the future, it is necessary to adopt a more advanced training-performance model (rather than the earliest and simplest Banister IR model) to formulate the optimal control framework.
Acknowledgement: Not applicable.
Funding Statement: This research was funded by the National Science and Technology Council, grant number NSTC 113-2221-E-002-136-.
Author Contributions: Conceptualization, Yi Yang and Che-Yu Lin; methodology, Yi Yang and Che-Yu Lin; software, Yi Yang; validation, Yi Yang; formal analysis, Yi Yang and Che-Yu Lin; investigation, Yi Yang and Che-Yu Lin; resources, Che-Yu Lin; writing—original draft preparation, Yi Yang and Che-Yu Lin; writing—review and editing, Yi Yang and Che-Yu Lin; visualization, Yi Yang and Che-Yu Lin; supervision, Che-Yu Lin; project administration, Che-Yu Lin; funding acquisition, Che-Yu Lin. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Please find the supplementary data for all of the raw data used for producing all of the results, figures and tables relevant to this study.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
Supplementary Materials: The supplementary material is available online at https://www.techscience.com/doi/10.32604/cmes.2025.064459/s1.
References
1. Borresen J, Lambert MI. The quantification of training load, the training response and the effect on performance. Sports Med. 2009;39:779–95. doi:10.2165/11317780-000000000-00000. [Google Scholar] [PubMed] [CrossRef]
2. Durell DL, Pujol TJ, Arnes JT. A survey of the scientific data and training methods utilized by collegiate strength and conditioning coaches. J Strength Cond Res. 2003;17(2):368–73. doi:10.1519/00124278-200305000-00026. [Google Scholar] [CrossRef]
3. Clarke DC, Skiba PF. Rationale and resources for teaching the mathematical modeling of athletic training and performance. Adv Physiol Educ. 2013;37(2):134–52. doi:10.1152/advan.00078.2011. [Google Scholar] [PubMed] [CrossRef]
4. Imbach F, Sutton-Charani N, Montmain J, Candau R, Perrey S. The use of fitness-fatigue models for sport performance modelling: conceptual issues and contributions from machine-learning. Sports Med-Open. 2022;8(1):29. doi:10.1186/s40798-022-00426-x. [Google Scholar] [PubMed] [CrossRef]
5. Taha T, Thomas SG. Systems modelling of the relationship between training and performance. Sports Med. 2003;33:1061–73. doi:10.2165/00007256-200333140-00003. [Google Scholar] [PubMed] [CrossRef]
6. Busso T, Thomas L. Using mathematical modeling in training planning. Int J Sports Physiol Perform. 2006;1(4):400–5. doi:10.1123/ijspp.1.4.400. [Google Scholar] [PubMed] [CrossRef]
7. Banister EW, Calvert TW, Savage MV, Bach T. A systems model of training for athletic performance. Aust J Sports Med. 1975;7(3):57–61. [Google Scholar]
8. Calvert TW, Banister EW, Savage MV, Bach T. A systems model of the effects of training on physical performance. IEEE Trans Syst Man Cybern Syst. 1976;2:94–102. doi:10.1109/TSMC.1976.5409179. [Google Scholar] [CrossRef]
9. Busso T. Variable dose-response relationship between exercise training and performance. Med Sci Sports Exerc. 2003;35(7):1188–95. doi:10.1249/01.MSS.0000074465.13621.37. [Google Scholar] [PubMed] [CrossRef]
10. Hellard P, Avalos M, Millet G, Lacoste L, Barale F, Chatard JC. Modeling the residual effects and threshold saturation of training: a case study of olympic swimmers. J Strength Cond Res. 2005;19(1):67–75. doi:10.1519/00124278-200502000-00012. [Google Scholar] [CrossRef]
11. Busso T. From an indirect response pharmacodynamic model towards a secondary signal model of dose-response relationship between exercise training and physical performance. Sci Rep. 2017;7(1):40422. doi:10.1038/srep40422. [Google Scholar] [PubMed] [CrossRef]
12. Kolossa D, Azhar B, Rasche C, Endler S, Hanakam F, Ferrauti A, et al. Performance estimation using the fitness-fatigue model with Kalman filter feedback. Int J Comput Sci Sport. 2017;16(2):117–29. doi:10.1515/ijcss-2017-0010. [Google Scholar] [CrossRef]
13. Turner JD, Mazzoleni MJ, Little JA, Sequeira D, Mann BP. A nonlinear model for the characterization and optimization of athletic training and performance. Biomed Hum Kinet. 2017;9(1):82–93. doi:10.1515/bhk-2017-0013. [Google Scholar] [CrossRef]
14. Couceiro MS, Dias G, Araújo D, Davids K. The ARCANE project: how an ecological dynamics framework can enhance performance assessment and prediction in football. Sports Med. 2016;46(12):1781–6. doi:10.1007/s40279-016-0549-2. [Google Scholar] [PubMed] [CrossRef]
15. Den Hartigh RJ, Meerhoff LRA, Van Yperen NW, Brauers JJ, Frencken WG, Emerencia A, et al. Resilience in sports: a multidisciplinary, dynamic, and personalized perspective. Int Rev Sport Exerc Psychol. 2024;17(1):564–86. doi:10.1080/1750984X.2022.2039749. [Google Scholar] [PubMed] [CrossRef]
16. Kirk DE. Optimal control theory: an introduction. Chelmsford, MA, USA: Courier Corporation; 2012. [Google Scholar]
17. Macki J, Strauss A. Introduction to optimal control theory. New York, NY, USA: Springer; 2012. [Google Scholar]
18. Hull DG. Optimal control theory for applications. New York, NY, USA: Springer; 2013. [Google Scholar]
19. Ma Z, Zou S. Optimal control theory. Singapore: Springer; 2021. [Google Scholar]
20. Sethi SP. Optimal control theory: applications to management science and economics. New York, NY, USA: Springer; 2021. [Google Scholar]
21. Razavi SE, Moradi MA, Shamaghdari S, Menhaj MB. Adaptive optimal control of unknown discrete-time linear systems with guaranteed prescribed degree of stability using reinforcement learning. Int J Dyn Control. 2022;10(3):870–8. doi:10.1007/s40435-021-00836-x. [Google Scholar] [CrossRef]
22. Chen X, Jin T. Optimal control for a multistage uncertain random system. IEEE Access. 2023;11:2105–17. doi:10.1109/ACCESS.2023.3234068. [Google Scholar] [CrossRef]
23. Hou LF, Li L, Chang L, Wang Z, Sun GQ. Pattern dynamics of vegetation based on optimal control theory. Nonlinear Dyn. 2025;113(1):1–23. doi:10.1007/s11071-024-10241-6. [Google Scholar] [CrossRef]
24. Jin C, Mao H, Chen Y, Shi Q, Wang Q, Ma G, et al. Engineering-oriented dynamic optimal control of a greenhouse environment using an improved genetic algorithm with engineering constraint rules. Comput Electron Agric. 2020;177:105698. doi:10.1016/j.compag.2020.105698. [Google Scholar] [CrossRef]
25. Hamelin FM, Bowen B, Bernhard P, Bokil VA. Optimal control of plant disease epidemics with clean seed usage. Bull Math Biol. 2021;83:1–24. doi:10.1007/s11538-021-00872-w. [Google Scholar] [PubMed] [CrossRef]
26. Luiz MHR, Takahashi LT, Bassanezi RC. Optimal control in citrus diseases. Comput Appl Math. 2021;40(6):191. doi:10.1007/s40314-021-01581-9. [Google Scholar] [CrossRef]
27. Ali HM, Ameen IG. Stability and optimal control analysis for studying the transmission dynamics of a fractional-order MSV epidemic model. J Comput Appl Math. 2023;434(3):115352. doi:10.1016/j.cam.2023.115352. [Google Scholar] [CrossRef]
28. Kadakia N. Optimal control methods for nonlinear parameter estimation in biophysical neuron models. PLoS Comput Biol. 2022;18(9):e1010479. doi:10.1371/journal.pcbi.1010479. [Google Scholar] [PubMed] [CrossRef]
29. Libotte GB, Lobato FS, Platt GM, Neto AJS. Determination of an optimal control strategy for vaccine administration in COVID-19 pandemic treatment. Comput Methods Programs Biomed. 2020;196:105664. doi:10.1016/j.cmpb.2020.105664. [Google Scholar] [PubMed] [CrossRef]
30. Nana-Kyere S, Boateng FA, Jonathan P, Donkor A, Hoggar GK, Titus BD, et al. Global analysis and optimal control Model of COVID-19. Comput Math Methods Med. 2022;2022(1):9491847. doi:10.1155/2022/9491847. [Google Scholar] [PubMed] [CrossRef]
31. Shindi O, Kanesan J, Kendall G, Ramanathan A. The combined effect of optimal control and swarm intelligence on optimization of cancer chemotherapy. Comput Methods Programs Biomed. 2020;189:105327. doi:10.1016/j.cmpb.2020.105327. [Google Scholar] [PubMed] [CrossRef]
32. Blueschke D, Savin I, Blueschke-Nikolaeva V. An evolutionary approach to passive learning in optimal control problems. Comput Econ. 2020;56(3):659–73. doi:10.1007/s10614-019-09961-4. [Google Scholar] [PubMed] [CrossRef]
33. Liang Y, Zhang WH, Lu Y, Wang ZS. Optimal control and Simulation for enterprise financial risk in Industry environment. Math Probl Eng. 2020;2020(1):6040597. doi:10.1155/2020/6040597. [Google Scholar] [CrossRef]
34. Shekhar C, Varshney S, Kumar A. Optimal control of a service system with emergency vacation using bat algorithm. J Comput Appl Math. 2020;364:112332. doi:10.1016/j.cam.2019.06.048. [Google Scholar] [CrossRef]
35. Rarità L, Stamova I, Tomasiello S. Numerical schemes and genetic algorithms for the optimal control of a continuous model of supply chains. Appl Math Comput. 2021;388:125464. doi:10.1016/j.amc.2020.125464. [Google Scholar] [CrossRef]
36. Luo W, Yuan D, Jin D, Lu P, Chen J. Optimal control of slurry pressure during shield tunnelling based on random forest and particle swarm optimization. Comput Model Eng Sci. 2021;128(1):109–27. doi:10.32604/cmes.2021.015683. [Google Scholar] [CrossRef]
37. Yoo H, Kim B, Kim JW, Lee JH. Reinforcement learning based optimal control of batch processes using Monte-Carlo deep deterministic policy gradient with phase segmentation. Comput Chem Eng. 2021;144(4):107133. doi:10.1016/j.compchemeng.2020.107133. [Google Scholar] [CrossRef]
38. Zhao L, Huang Z, Fu Q, Fang N, Xing B, Chen J. HVAC optimal control based on the sensitivity analysis: an improved SA combination method based on a neural network. Comput Model Eng Sci. 2023;136(3):2741–58. doi:10.32604/cmes.2023.025500. [Google Scholar] [CrossRef]
39. Imran M, McKinney B, Butt AIK. SEIR mathematical model for Influenza-Corona co-infection with treatment and hospitalization compartments and optimal control strategies. Comput Model Eng Sci. 2025;142(2):1899–1931. doi:10.32604/cmes.2024.059552. [Google Scholar] [CrossRef]
40. Abidemi A, Aziz NAB. Optimal control strategies for dengue fever spread in Johor. Malaysia Comput Methods Programs Biomed. 2020;196:105585. doi:10.1016/j.cmpb.2020.105585. [Google Scholar] [PubMed] [CrossRef]
41. Zouhri S, El Baroudi M, Saadi S. Optimal control with isoperimetric constraint for chemotherapy of tumors. Int J Appl Comput Math. 2022;8(4):215. doi:10.1007/s40819-022-01425-y. [Google Scholar] [CrossRef]
42. El Baroudi M, Laarabi H, Zouhri S, Rachik M, Abta A. Stochastic optimal control model for COVID-19: mask wearing and active screening/testing. J Appl Math Comput. 2024;70:6411–41. doi:10.1007/s12190-024-02220-2. [Google Scholar] [CrossRef]
43. Tassé AJO, Kubalasa VB, Tsanou B. Nonstandard finite difference schemes for some epidemic optimal control problems. Math Comput Simul. 2025;228:1–22. doi:10.1016/j.matcom.2024.08.028. [Google Scholar] [CrossRef]
44. Lenhart S, Workman JT. Optimal control applied to biological models. Boca Raton, FL, USA: Chapman and Hall/CRC; 2007. [Google Scholar]
45. Pyne DB, Hopkins WG, Batterham AM, Gleeson M, Fricker PA. Characterising the individual performance responses to mild illness in international swimmers. Br J Sports Med. 2005;39(10):752–6. doi:10.1136/bjsm.2004.017475. [Google Scholar] [PubMed] [CrossRef]
46. Bradshaw EJ, Hume PA, Aisbett B. Performance score variation between days at Australian national and Olympic women’s artistic gymnastics competition. J Sports Sci. 2012;30(2):191–9. doi:10.1080/02640414.2011.633927. [Google Scholar] [PubMed] [CrossRef]
47. Lim JJ, Kong PW. Effects of isometric and dynamic postactivation potentiation protocols on maximal sprint performance. J Strength Cond Res. 2013;27(10):2730–6. doi:10.1519/jsc.0b013e3182815995. [Google Scholar] [PubMed] [CrossRef]
48. Park JL, Fairweather MM, Donaldson DI. Making the case for mobile cognition: eEG and sports performance. Neurosci Biobehav Rev. 2015;52:117–30. doi:10.1016/j.neubiorev.2015.02.014. [Google Scholar] [PubMed] [CrossRef]
49. Currell K, Jeukendrup AE. Validity, reliability and sensitivity of measures of sporting performance. Sports Med. 2008;38:297–316. doi:10.2165/00007256-200838040-00003. [Google Scholar] [PubMed] [CrossRef]
50. Bellar D, LeBlanc NR, Campbell B. The effect of 6 days of alpha glycerylphosphorylcholine on isometric strength. J Int Soc Sports Nutr. 2015;12(1):1–6. doi:10.1186/s12970-015-0103-x. [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools