
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Real-Time Fault Detection and Isolation in Power Systems for Improved Digital Grid Stability Using an Intelligent Neuro-Fuzzy Logic
1 College of Electrical Engineering and New Energy, China Three Gorges University, Yichang, 443002, China
2 Department of Computer Systems Engineering, The Islamia University of Bahawalpur, Bahawalpur, 63100, Pakistan
3 Department of Computer Science, The Islamia University of Bahawalpur, Bahawalpur, 63100, Pakistan
* Corresponding Author: Zuhaib Nishtar. Email:
Computer Modeling in Engineering & Sciences 2025, 143(3), 2919-2956. https://doi.org/10.32604/cmes.2025.065098
Received 03 March 2025; Accepted 23 May 2025; Issue published 30 June 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This research aims to address the challenges of fault detection and isolation (FDI) in digital grids, focusing on improving the reliability and stability of power systems. Traditional fault detection techniques, such as rule-based fuzzy systems and conventional FDI methods, often struggle with the dynamic nature of modern grids, resulting in delays and inaccuracies in fault classification. To overcome these limitations, this study introduces a Hybrid Neuro-Fuzzy Fault Detection Model that combines the adaptive learning capabilities of neural networks with the reasoning strength of fuzzy logic. The model’s performance was evaluated through extensive simulations on the IEEE 33-bus test system, considering various fault scenarios, including line-to-ground faults (LGF), three-phase short circuits (3PSC), and harmonic distortions (HD). The quantitative results show that the model achieves 97.2% accuracy, a false negative rate (FNR) of 1.9%, and a false positive rate (FPR) of 2.3%, demonstrating its high precision in fault diagnosis. The qualitative analysis further highlights the model’s adaptability and its potential for seamless integration into smart grids, micro grids, and renewable energy systems. By dynamically refining fuzzy inference rules, the model enhances fault detection efficiency without compromising computational feasibility. These findings contribute to the development of more resilient and adaptive fault management systems, paving the way for advanced smart grid technologies.Keywords
The integration of advanced technologies such as the Internet of Things (IoT), artificial intelligence (AI), and renewable sources of energy is transforming power systems around the world at a lightning speed into digital grids. Digital grids bring a huge enhancement to energy management, operational efficiency, and system reliability. One key impact of digital grids is the ability to provide advanced monitoring and control for predictive maintenance and real-time fault detection. However, as digital grids advance, they are challenged with increasing complexities, particularly in fault detection and isolation (FDI) systems. Faults such as transmission line outages, short circuits, and equipment failure have resulted in significant economic loss and disruptions in power system stability [1]. Ensuring the reliability and resilience of digital grids requires an efficient FDI system capable of adapting to dynamic operating conditions and uncertainties.
Traditional FDI methods like rule-based systems and statistical models do not support the dynamic characteristics of today’s digital grids. These traditional methods rely on pre calculated rules, which become ineffective in new fault modes [2]. Additionally, these methods do not function well with real-world noisy and incomplete data. Despite the development of machine learning (ML) techniques to improve fault detection precision, ML techniques remain reliant on big data and big computation [3]. Moreover, most of the ML models are black-box systems whose reasoning is difficult to understand, which poses difficulties for mission-critical applications such as grid fault detection [4].
In this case, the emergence of neuro-fuzzy logic presents a possible solution by integrating the advantages of fuzzy logic systems and ANNs. Fuzzy logic finds particular use in digital grid systems where uncertainty and incomplete data issues are the main concern [5]. It mimics human reasoning, making decisions based on linguistic variables that enable the detection of faults under varying operation conditions. However, fuzzy logic on its own lacks the ability to learn and adjust its membership functions, thus performing poorly in changing environments. However, ANNs possess strong learning capacities, enabling them to recognize patterns and associations between data [6]. While neural networks are excellent pattern recognizers, they need lots of data to train them, and they lack interpretability, making them inappropriate for application in real-time fault detection systems.
Through the integration of fuzzy logic and neural networks, the neuro-fuzzy system overcomes these drawbacks, combining the reasoning capability of fuzzy logic with the flexibility of ANNs. The integration enables the system to learn from previous fault data and refine its detection capability through adaptive reasoning [7]. Unlike other machine learning architectures, neuro-fuzzy systems provide explainable outputs, thus being more suitable for real-time decision-making in fault detection [8]. Though previous research has confirmed the performance of neuro-fuzzy logic for individual components of power systems, most of the research did not consider an integrated approach for digital grids at a large scale. Furthermore, the systems were not tested over a wide scale of fault conditions, and their uses in actual smart grids are scary [9].
This research aims to bridge this gap by developing a comprehensive neuro-fuzzy logic framework for digital grid fault detection and isolation. The proposed framework will combine the capabilities of neural networks and fuzzy logic reasoning to enhance FDI. Simulations will be conducted under various fault conditions, such as voltage sags, current spikes, and line outages, to assess the robust-ness of the framework in real-world scenarios. A key objective of this work is to compare the performance of the proposed framework with traditional rule-based and machine learning-based approaches, focusing on detection accuracy, isolation precision, and response time. Additionally, the scalability of the framework will be evaluated in terms of its applicability to large-scale digital grids [10].
Research has focused on AI-based fault detection techniques but none have established a complete solution that includes real-time flexibility, interpretability, and scalability. Most solutions are specific to one kind of fault only and do not offer a generalized solution that can be used for different grid layouts. In addition, most techniques have not been tested in real-time operating environments and are therefore not feasible for form-scale smart grids. This research bridges these gaps by conducting a thorough examination of the neuro-fuzzy logic method under various grid conditions, offering a more flexible and scalable solution to fault detection.
Traditional fault detection methods such as rule-based and machine learning technology fail with dynamic properties of new digital grids and apply fixed thresholds that do not change according to real-time situations. These methods are not adaptable in real time and cannot identify faults that are about to happen or react to unexpected fault situations. Fault classification inadequacies cause misclassifications and delayed responses, which also delay effective fault management. The classic methods require to have large, high-quality sets of training data, which are not always available or readily accessible in on-line grid usage.
The proposed model offers real-time adaptability, adjusting its parameters and detection rules based on real-time data from the grid to ensure accurate fault detection even under changing conditions. It employs dynamic learning, continuously improving its detection accuracy over time by incorporating new fault data. The system provides explainable outputs, offering transparency and clarity, which enhances operator trust and decision-making during fault management. The model improves fault classification accuracy by combining neural network-based pattern recognition with fuzzy logic reasoning, reducing misclassifications and improving system efficiency. The framework is scalable, computationally efficient, and capable of performing both fault detection and isolation, preventing cascading failures and improving grid stability.
This paper is structured as follows: Section 1 clarified the problem statement, the need for fault detection, and how the proposed neuro-fuzzy system addresses the gap in existing methods. Section 3 detailed explanation of the neuro-fuzzy logic model, including pre-training, real-time adaptation, and fault detection strategy. Section 4 presented the fault detection results along with KPIs such as MAE, RMSE, Precision, and Recall, followed by Density Analytics, Computational Complexity, Sensitivity Analysis, and Feature Importance. Section 4.3 presented a detail comparison of the proposed model with existing methods, highlighting its advantages and areas for improvement. Section 5 presented a summary of key findings, limitations, and future directions for research.
Power systems fault detection and isolation has been widely studied and fuzzy logic and neuro fuzzy approaches have been advanced. Digital grids have a requirement for adaptive, intelligent frameworks that overcome uncertainties and the non-linearity of traditional fault detection techniques. Rule based fuzzy controllers for solid state transfer switches have been developed by researchers to help in rapid and sensitive fault detection in power grids [11]. Such controllers reduce the disturbances associated with load transfers while improving the transition between operational states. Fuzzy logic also is incorporated into fault current limiters for suppression of transient disturbances and increase in grid resilience [12]. These advancements point out the importance of fuzzy based decision making in handling power quality problems.
In power systems, fuzzy control mechanisms have also been applied in the context of using renewable energy sources. A better model for classifying faults in photovoltaic (PV) systems was made through ANFIS which improved their reliability [13]. Fuzzy logic controllers were tested for improving the stability of a power system under conditions where the load changed rapidly [14]. Similarly, using fuzzy logic in various multi-agent strategies was examined for regulating the grid and fuzzy protection schemes have shown improvement in managing PV power plant operations during faults [15,16]. The research reveals that using fuzzy logic is becoming more relevant in renewable energy integration and managing local power grids.
Fuzzy decision-making models are also used for fault detection in high voltage transmission networks. In this study researches designed fuzzy inference-based methodologies for determining how transmission faults affect real time sensor data in order to determine the impact [17,18]. According to their findings, fuzzy logic improves speed and accuracy of the fault isolation mechanism and decreases false alarms. Digital grid fault diagnosis has been widely achieved with neuro-fuzzy hybrid models. In a hybrid neuro-fuzzy system was proposed, using the expert fuzzy rules with its ability of adaptive learning for the detection of both transient and permanent faults [19]. This framework was further extended to cyber-physical power energy systems with improved accuracy in the detection of power anomalies over a range of operation conditions [11,20].
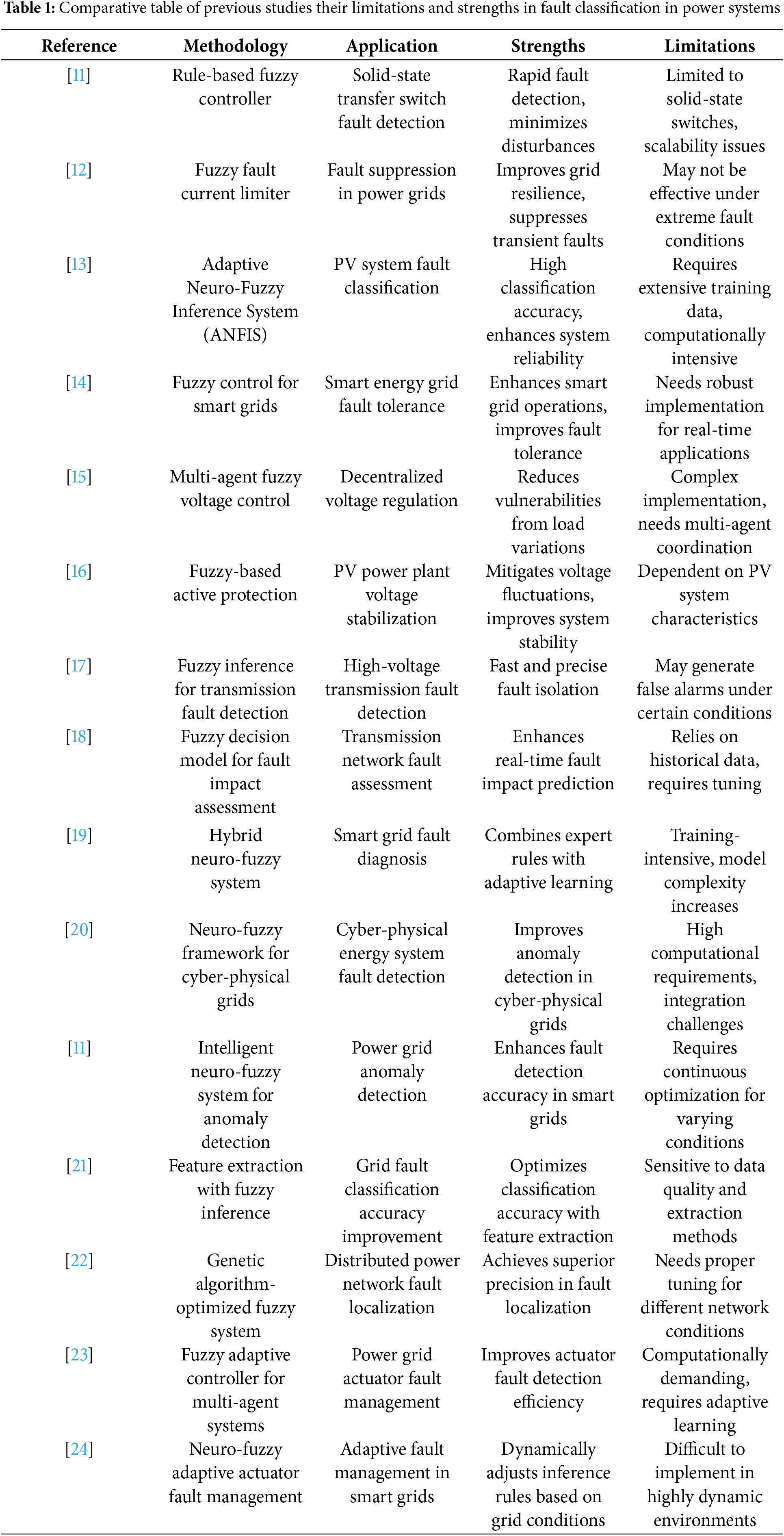
Also investigated have been advanced computational techniques for the optimization of fuzzy-based fault detection. In the combination of feature extraction and fuzzy inference was used to improve the classification accuracy in grid fault detection [21]. Also, researchers introduced a genetic algorithm optimized fuzzy system that proved to be more precise in fault localization in distributed power networks [22]. In addition, studies have been done on the effectiveness of the fuzzy adaptive controllers in such Multi Agent Systems during the presence of actuator faults and actual control challenges in the modern power grids [23,24]. According to the findings, the efficiency of fault detection can be improved with the aid of neuro-fuzzy models that adjust the inference rules based on real time conditions of the grid. Table 1 shows the overall comparative table of previous studies.
New advances in fault detection algorithms have introduced new approaches, such as the IPORF method, which combines a improved parrot optimizer (IPO) algorithm with random forest (RF) for AUV fault detection. Though it achieves high classification performance, it is more concerned with fault detection rather than fault isolation, hence limiting its application in grid systems. Additionally, like deep learning algorithms, it requires large datasets, thereby making real-time applications challenging. One of the other researches incorporates deep learning together with genetic algorithms but is lacking in real-time adaptability as well as interpretability, employ its ability to learn in order to address unexpected fault conditions [25]. The proposed neuro-fuzzy logic system, in contrast, fares better since it is capable of detecting and isolating faults in real time. Unlike the prior models, it keeps adapting consistently with minimal upfront training and outputs explainable results, ensuring transparency and improving decision-making. This combination of real-time flexibility, fault isolation, and explainability makes it a superior solution for smart grid applications, where fault detection and isolation are critical for the stability of the grid.
Voltage stability monitoring (VSM) has arisen as a key focus with increased penetration of renewable sources. Authors of this research highlight the ability of Artificial Neural Networks (ANNs) for real-time VSM and indicate their superiority over traditional stability indices that are incapable of handling the dynamic nature of modern grids [26]. Similarly, this research work in (2024) proposed a fault detection algorithm using neural networks for renewable-energy-based power systems, which showed that ANNs enhance fault-clearing in high-renewable-penetrated power systems, promoting reliability and real-time localization [21].
Lastly, researchers in (2024) explored the adaptive neuro-fuzzy inference system (ANFIS) with the help of the support vector machines (SVM) for transient stability assessment, highlighting the relevance of merging machine learning into the traditional method for ensuring smart grid stability and fault response [27].
The proposed neuro-fuzzy model is compared with baseline models like Conventional Fuzzy Logic, ANFIS, and Type-2 Fuzzy Logic, all of which are widely used in fault detection and voltage stability monitoring. While Conventional Fuzzy Logic is effective for handling uncertainty, it struggles with adapting to dynamic grid behaviors, especially in systems with high renewable energy integration. ANFIS improves adaptability, but still faces challenges in real-time adaptability and handling cyber-physical vulnerabilities. Type-2 Fuzzy Logic extends fuzzy systems by addressing uncertainty in membership functions, but its complexity can slow performance, and it also falls short in responding to cyber-physical threats.
These models are relevant for modern smart grids, which require fault detection systems that can handle dynamic changes and cyber-physical threats like cyber-attacks. Traditional models fail to account for such vulnerabilities, making them less effective in detecting faults caused by cyber disruptions. The neuro-fuzzy model, however, is designed to dynamically adapt to evolving conditions, offering better fault detection and isolation in the presence of cyber threats, thereby enhancing the resilience of modern power systems.
Neural network learning capacity is integrated with fuzzy logic’s reasoning characteristics by neuro-fuzzy logic to control the uncertain dynamics of non-linear systems within complex digital power networks. Fuzzy logic makes it possible to process uncertain information computationally in order to establish fuzzy sets and membership functions to denote working conditions such as “High Voltage” and “Low Current.” Expert-based rules of inference, for example, categorizing line-to-ground faults whenever high voltage oscillations are simultaneous with low current spikes, can enhance power system decision-making. Neural networks, which were able to learn from large data sets, enhance system performance by adjusting weights and biases, hence being the optimal tools for extracting complex data relationships. The integration of neuro-fuzzy systems enhances fault detection efficiency, as they dynamically refine fuzzy membership functions and rules based on processed input data. This capability is very helpful in FDI for digital grids, where noisy and fast-fluctuating data challenge traditional monitoring approaches. Real-time automation in voltage, current, and harmonics processing improves the precision of detection; hence, fault isolation is effective, guaranteeing reliable grid operations. The hybrid approach of neuro-fuzzy logic enhances grid resilience, hence providing a robust framework for modern energy systems that require adaptability and precision in fault management.
3.1.1 Model Training Elaboration
A pre-trained model is utilized in the proposed fault detection framework. Here, the system is using historical fault data generated from simulated fault scenarios in the grid. This pre-training phase allows the system to learn typical fault signatures and establish a knowledge base of fault patterns across various grid configurations. Once the model is deployed in the field, it continues to learn and adapt to new fault patterns. During deployment, the system uses the initial pre-trained parameters, while continually adjusting the system parameters through real-time data updates. Before deployment, the system is trained on a comprehensive dataset of faults such as line-to-ground faults, short circuits etc. This training process takes place where the model learns from a variety of grid conditions, grid topologies, and fault types. During operation, as new fault data comes in, the model uses a feedback mechanism to adjust its parameters in real-time. This could involve: Incremental learning (as data comes in, the model updates its knowledge base). Adaptive fuzzy rules that change based on new patterns identified in the real-time fault data. Real-time validation that continuously checks if detected faults match the known fault scenarios learned during pre-training.
The proposed system design implements real-time optimization techniques with an integrated neuro-fuzzy framework to perform fault detection and isolation functions in digital grids. The system is designed to be scalable with adaptability for fault diagnosis accuracy, considering nonlinear and dynamic behavior in the modern grid. The proposed system consists of three major parts: a well-defined objective function optimizes the mechanisms of data acquisition and the neuro-fuzzy inference system while controlling the fault classification output. The model is pre-trained using a comprehensive dataset of fault scenarios and operational conditions to optimize its performance before deployment. However, it also has the ability to fine-tune in real-time based on new data, allowing it to adapt to dynamic grid conditions. This dual approach ensures both high accuracy and adaptability during real-time fault detection.
The system starts with real-time capture through sensors in the grid regarding some operational parameters that are critical for voltage deviations (Vd), abnormal grid conditions, current spikes (Is) resulting from fault events, power quality (PQ) indices including harmonics, frequency deviations, and other metrics of grid stability. The input data vector is structured as.
The input data vector is represented as:
This data is preprocessed to normalize values, reduce noise, and improve consistency:
where μ and σ represent the mean and standard deviation of the dataset, respectively.
3.1.4 Neuro-Fuzzy Inference Engine
The system core integrates an inference engine that combines fuzzy logic interpretability with the adaptability of neural networks. The fuzzy membership functions map input variables (such as Vd, Is, and PQ) to fuzzy sets. For instance, the fuzzy membership function for Vd is defined as:
where c represents the center and σ is the spread of the membership function.
The fuzzy rule base incorporates expert knowledge and historical fault records. A sample rule might be: IF Vd is High AND Is is MEDIUM, THEN Fault = LINE-TO-GROUND.
The fuzzy inference process integrates these rules to produce intermediate outputs. The system also learns through the use of a neural network to dynamically adapt the membership function parameters (c, σ) and rule weights, enabling it to learn from data. The output y is determined by the weighted sum of rule outputs:
where wi is the firing strength of rule i, and fi is the output of the rule.
The optimization of parameters is done using a genetic algorithm to minimize the Mean Squared Error (MSE) between predicted (y) and actual (
Additional constraints ensure the robustness of the system:
Finally, to balance accuracy and computational efficiency, a single objective optimization function is defined as:
where T represents computation time, and α, β are weights reflecting the priorities of accuracy and efficiency.
This equation defines a single-objective function that balances both accuracy and computational efficiency based on the assigned weights α and β. The model seeks to optimize fault detection accuracy while maintaining an efficient computation time, ensuring that both aspects are effectively prioritized according to their respective weights.
3.1.5 Fault Classification Outputs
The final stage of the system produces fault classification and isolation results:
where
This neuro fuzzy system architecture favors existing grid management by optimizing real-time objective functions to deal with complex situations in the grid is shown in Fig. 1. The solution has worked reliably with fault detection features and adjustable operations based on changing circumstances. The applied solution shall ensure high precision in order to work out as an applicable solution in a digital grid system. MF, R, N, and D represent key components of the neuro-fuzzy model. MF refers to Membership Functions, which map input variables to fuzzy sets, crucial for the fuzzification process. R stands for the Rule Base, a set of “if-then” rules that guide the classification of faults. N indicates the Neural Network used for adaptive learning to refine fuzzy rule parameters. D represents the defuzzification and the system’s final stage mention two variables, such as fault classification Ft and fault location Fl. The model achieves an impressive accuracy of 97.2%, surpassing traditional methods like FIS and ANFIS, due to its hybrid approach combining deep learning with fuzzy logic.
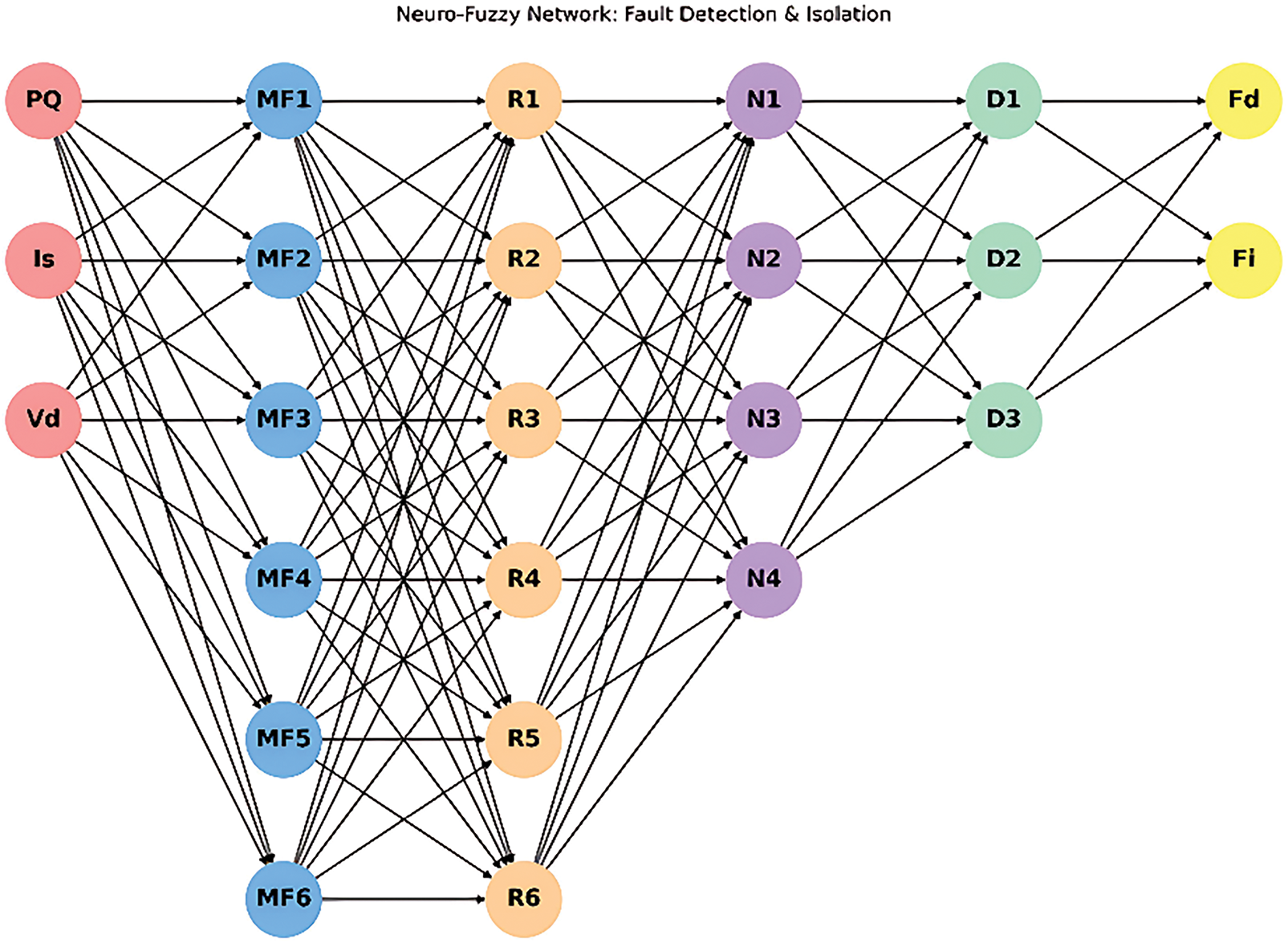
Figure 1: Neuro fuzzy system architecture
The neuro-fuzzy fault detection is simulated by extensive simulations carried out on a Python-based platform, with implications of specifications from the IEEE 33-bus test system. The experiments were conducted on a high-performance computing platform equipped with an Intel Core i7-10700K processor and 16 GB of RAM. The software environment included MATLAB R2022b and Python 3.8, utilizing packages such as Tensor Flow, NumPy, and SciPy to facilitate the fault detection and isolation simulations. The proposed method was compared with existing algorithms to evaluate its performance. The computational configurations provided the necessary resources to run large-scale simulations efficiently, ensuring that the experiments were conducted under optimal conditions to assess the model’s effectiveness and scalability. The simulation framework has been designed in such a way that fault and normal operating data can be made to evaluate the model’s performance in a grid abnormality situation with high precision. In this regard, for an optimal trade-off between the computational efficiency and accuracy of transient fault detection, a time window of 200 ms was used for the simulations. It improves the responsiveness for real-time grid monitoring applications by offering industrial benchmark standards for smart grid fault diagnosis. For complete assurance of the quality of power in digital grids, various types of faults are simulated in this study. A line-to-ground fault occurs when a single-phase conductor reaches the ground-the effect being voltage reduction and increased fault current. A Line-to-Line Fault (LLF) results from an electrical breakdown between two phases, leading to voltage imbalance and excessive current flow. A Three-Phase Short Circuit (3PSC) is a severe disruption where all three phases short-circuit, generating dangerously high current surges and system instability. Harmonic Distortion (HD) arises due to non-linear loads such as power electronics, introducing high-frequency distortions that degrade power quality and affect sensitive grid components. An Open Circuit Fault (OCF) causes a power flow interruption when a conductor is faulty, leading to voltage instability and unbalanced load conditions. Transformer Faults (TF) occur due to winding fault or insulation failure, leading to waveform distortion and reduction in efficiency. Renewable Energy System Faults (REF) cover voltage variation from the photovoltaic and wind turbine sources due to environmental variation, affecting grid stability. Steady-state operation without any disturbance condition reflects the normal operating state. The IEEE 33-bus test system is utilized for evaluating fault detection and localization by examining different transmission line positions and bus points. The hybrid Neuro-Fuzzy model enhances fault classification accuracy and grid resilience.
For fault detection and isolation to be performed with accuracy, the model to be applied here is the one that depends on an accurate measurement chain for data acquisition. The measurement chain of this work is a series of major components like Phasor Measurement Units (PMUs), voltage sensors, and current transformers (CTs) that continuously monitor and record significant electrical parameters in the power grid. These sensors capture real-time measurements of voltage, current, frequency, and harmonics in the IEEE 33-bus system, such as high-resolution time-synchronized readings for effective fault detection.
The PMUs are used for precise measurement of voltage and current, and they take the correct phase angle measurements across the grid. The voltage sensors and current transformers are utilized to measure the voltage and current signals on various buses and lines in the system. Sensor data are fed to the central processing unit, where they are processed and computed by the fault detection model. This measurement chain allows the model to keep track of the electrical status of the grid and detect deviations typical of faults.
Test Faults at Buses with PV Systems: Assess how the system behaves when faults occur at buses where PV systems (Bus 6, Bus 15, Bus 23, Bus 27, Bus 31) are connected. Wind Turbine Faults: Introduce faults at wind turbine connected buses (Bus 9, Bus 18, Bus 25, Bus 29, Bus 33) to observe the impact of wind power on fault detection. Battery Storage and Super capacitors: Check how battery storage (at Bus 11, Bus 16, Bus 24, Bus 30) and Super capacitors (at Bus 11, Bus 19) affect fault isolation.
The simulation integrates real-time electrical parameters to ensure dataset accuracy carried out on a Python-based platform. Voltage (V) is monitored at each bus before and after fault occurrence to assess fault impact. Current (I) variations are analyzed at affected buses to detect abnormal fault-induced surges. Frequency (f) deviations from the nominal 50 Hz indicate instability in the grid. Power Factor (PF), the ratio of active power to apparent power, is tracked to observe changes due to system faults Total Harmonic Distortion (THD) is measured to quantify waveform distortions caused by non-linear loads and faults. Reactive Power (Q) evaluates imbalances from transient disturbances that affect grid stability. Fault Resistance is simulated to represent the severity of high-impedance faults, which can alter detection and localization accuracy. Fault Occurrence Time is recorded to synchronize analysis with transient and steady-state responses. A 200 ms simulation time is chosen to balance processing speed and accurate short-lived fault detection. This duration captures the fault initiation, transient response, and steady-state operations, ensuring reliable classification without unnecessary computational overhead. This approach further strengthens the Neuro-Fuzzy model for fault diagnosis and predictive accuracy in digital grids.
3.2.3 Simulation Setup and Data Generation
Perform a simulation of the IEEE 33-bus system using Python-driven power system analysis tools, with numerical solvers developed in SciPy. The flow of simulation regarding fault classification and localization is carried out in an organized manner. The process begins with the development of the grid model, wherein the IEEE 33-bus test system is set up with standard transmission lines, loads, and distributed generation units. Thus, Fault Injection is carried out by introducing different fault types at multiple locations and with varying severity for ensuring dataset diversity. Sensor Data Extraction is allowed by virtual PMUs and IEDs that collect real-time voltage, current, and harmonic data. Before feeding the dataset into the Neuro-Fuzzy model, this data is preprocessed using techniques such as noise filtering and normalization for better accuracy. Then, 80% of the dataset is used for training and 20% for testing to optimize model generalization and fault detection capability. This Python-based simulation framework will ensure that real-world fault scenarios are tested strongly with computational efficiency. Real-time integration of grid parameters with optimized simulation windows enhances the accuracy of fault classification and makes the approach resilient to multiple operating conditions by ensuring precise fault localization. IEEE 33 bus testing system is shown in Fig. 2.
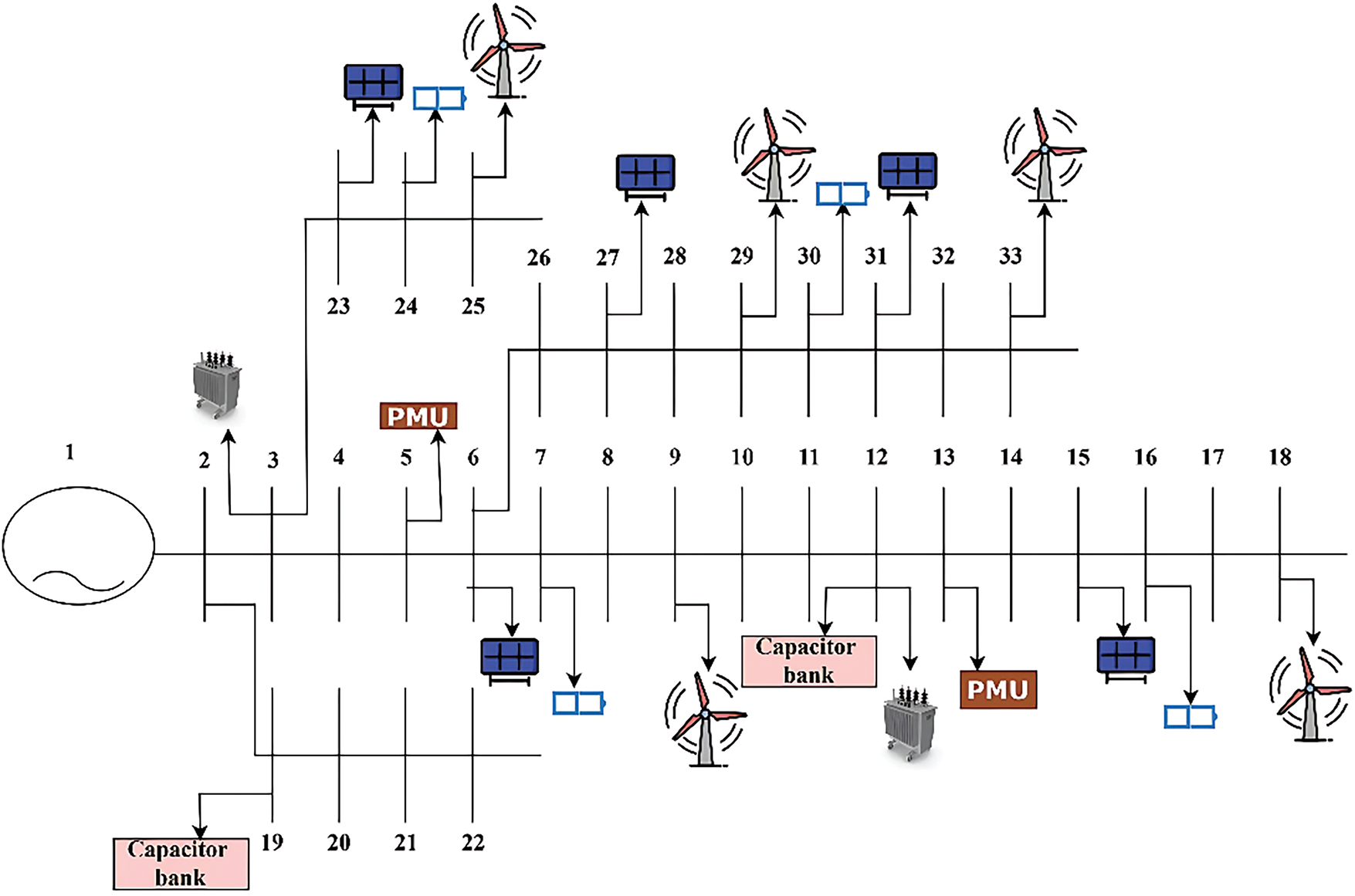
Figure 2: IEEE 33 bus testing system
3.3 Data Flow for IEEE 33-Bus Digital Grid Operations
The neuro-fuzzy fault detection system takes in real-time input data to perform fuzzy inference in order to detect and isolate faults within IEEE 33-bus digital grid operations. There are three main stages of the data flow: input acquisition, neuro-fuzzy inference processing, and fault classification & isolation.
The power system continuously monitors critical electrical parameters, having placed virtual PMUs and IEDs at strategic locations within the IEEE 33-bus network. These devices ensure fault detection and grid stability assessment in real time by capturing the vital system variables. The key parameters include voltage deviation (Vd), where sudden drops or spikes signal faults that impact bus stability. Current spike (Is) measures excessive current surges caused by short circuits or load imbalances. Total harmonic distortion (THD) analyzes waveform distortions, which increase with nonlinear loads and fault conditions. These parameters are essential for detecting faults and maintaining the stability of the power grid. Power factor is used to identify abnormal system operation; low (PF) usually points to ineffective usage of power or system faults. Reactive power (Q) fluctuations identify voltage instability due to transient or sustained faults. Frequency deviation (f) is monitored because this measures grid health since perturbations easily lead to deviations from the nominal value of 50 Hz, which directly impacts overall system performance. The information collected, before fed into the neuro-fuzzy inference system, was preprocessed with normalization and noise reduction techniques to improve the accuracy of fault classification and model performance optimization.
3.3.2 Neuro-Fuzzy Inference System (NFIS) Processing
Preprocessed data are then fed into the FIS for fault classification using fuzzy logic in combination with neural network learning. Neuro-fuzzy inference system improves decision-making by embedding expert knowledge through adaptive learning mechanisms. Firstly, fuzzification is done in which continuous numerical inputs such as voltage deviation, current spike, and total harmonic distortion are converted into linguistic variables using the membership function given in Eq. (3).
Fuzzy sets for voltage deviation (Vd), are defined as low, medium, and high to enable the system to characterize the deviation with respect to nominal voltage levels. Current spike (Is), is also described as low, medium, and high in order to define fault-induced surges in the current. The Total harmonic distortion is categorized into normal, moderate, and severe, representing increased waveform distortions that degrade the quality of the power. Rule-based inference engine: It makes a classification of the fault on a basis of a previously developed fuzzy rule base. Deploy expert-defined logic in analyzing interrelations among the system parameters. For example, if voltage deviation is high and current spike is medium, the system identifies line-to-ground fault, while voltage deviation being low and current spike is high, the fault identified is a line-to-line fault. Similarly, THD is severe combined with low power factor (PF); the type of fault classified falls under harmonic distortion HD. The method works by mapping numerical values into fuzzy sets, employing if-then rules and closely imitating the way humans think in a logical manner during fault classification. With the implementation of a rule-based system through the fuzzified inputs, high-accuracy results were achieved on power quality disturbance classification. This will provide an adaptive framework for the neuro-fuzzy logic in fault diagnosis and localization with continuous improvement to enhance power system reliability.
The neuro-fuzzy inference system (NFIS) follows a feed-forward neural network with the fuzzy membership functions and weights of the rule, adjusted to enable the method to adapt easily with changing conditions in the power grid. Therefore, this auto-improvement learning mechanism develops higher accuracy as well as high reliability in power system fault classification. By continuously updating the rule base, the model improves its ability to detect and localize faults with greater precision. The firing strength of each rule (wi) determines the degree to which a specific fault condition is activated. It is computed using the minimum operator, ensuring that the rule’s strength is dictated by the weakest contributing parameter:
where
The weighted average method is used to convert fuzzy results into a crisp numerical output:
where fi represents the fault severity index, and wi denotes the firing strength of each rule. This method ensures that the final conclusion represents the weighted contribution of all active rules, leading to a more accurate fault diagnosis. With the incorporation of feedforward neural networks for dynamic variation and defuzzification for precise quantification of faults, NFIS model enhances fault classification, location, and severity assessment. A combination that promises real-time adaptation and steady monitoring of the power system, thereby promising better grid reliability and stability.
3.3.3 Fault Classification and Isolation (Output)
The final output of the Neuro-fuzzy fault detection system is two main outcomes that ensure efficiency in detecting faults and their localization within the IEEE 33-bus grid. The first is an output known as fault type (Ft), which tells the type of fault that is being experienced within the system. It is classified depending on a fuzzy inference system and neural network-based learning to classify it accurately. The fault types which can be potential are line to ground fault (LGF), line to line fault (LLF), three phase short circuit (3PSC), harmonic distortion (HD), open circuit fault (OCF), transformer fault (TF), and renewable energy system fault (REF). Each of these fault types has specific grid disturbances associated with it, ensuring that the model will be able to distinguish between different power quality issues. The second output is fault location (Fl), which is determined by mapping the real-time sensor data into the grid topology, showing which bus or transmission line has been affected. Phasor measurement units (PMUs) and intelligent electronic devices (IEDs) continuously monitor electrical parameters across the IEEE 33-bus network and feed in location data. Voltage, current, harmonic distortion, and power factor anomalies are associated with the system buses and transmission lines to precisely locate the fault. The response will be faster since fault classification and localization are automated by the neuro-fuzzy fault detection System; hence, it contributes to lesser downtime and better grid stability. Real-time sensor data integration, fuzzy logic-based decision-making and machine learning optimization enhance adaptability and precision, thus making the system robust and scalable for dynamic power grid conditions. Data flow diagram of Neuro Fuzzy logic is shown in Fig. 3.
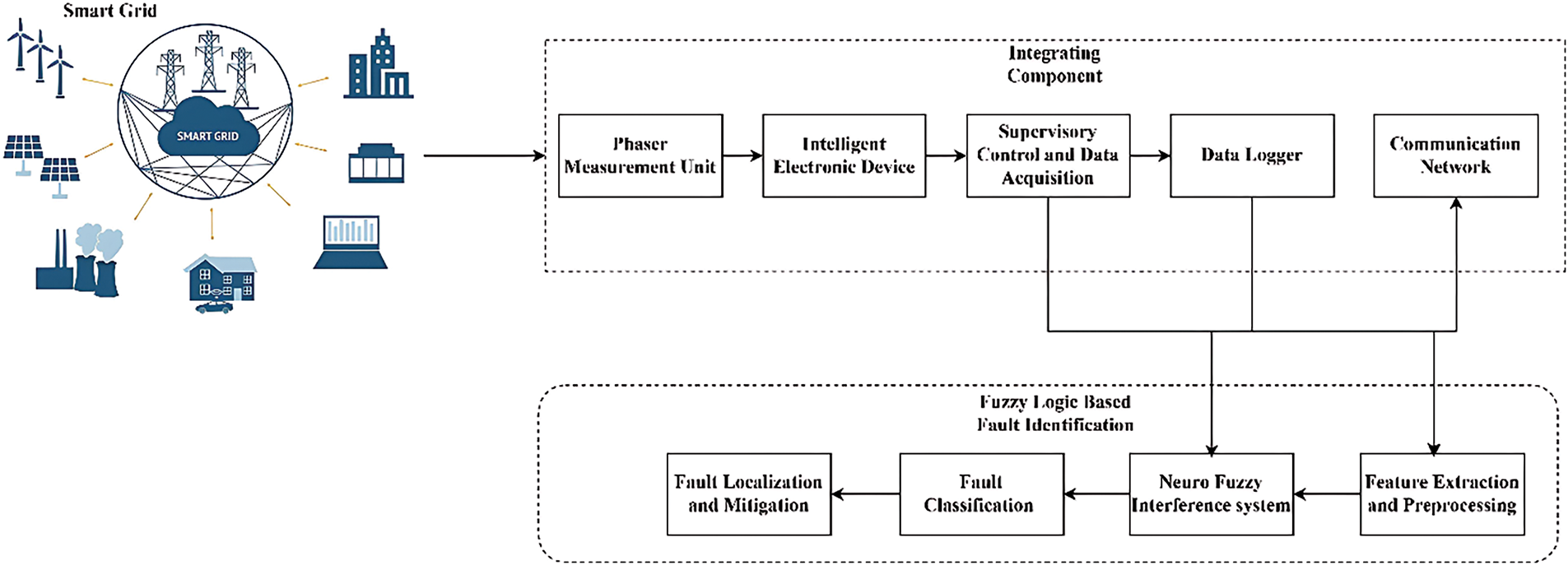
Figure 3: System model diagram of proposed model
3.4 Training Neuro-Fuzzy System
An adaptive neuro-fuzzy system (ANFIS) classification system performs under a supervised learning process. Faults are identified within an IEEE 33-bus test system, taking care of chassis pattern separation. Model development covers creating the dataset, activating the fuzzy inference system, training of the model, optimization with necessary validation of such a procedure. Design methods take sequences in a way that these provide the model with dynamic adaptation potential with regards to changes within a power grid.
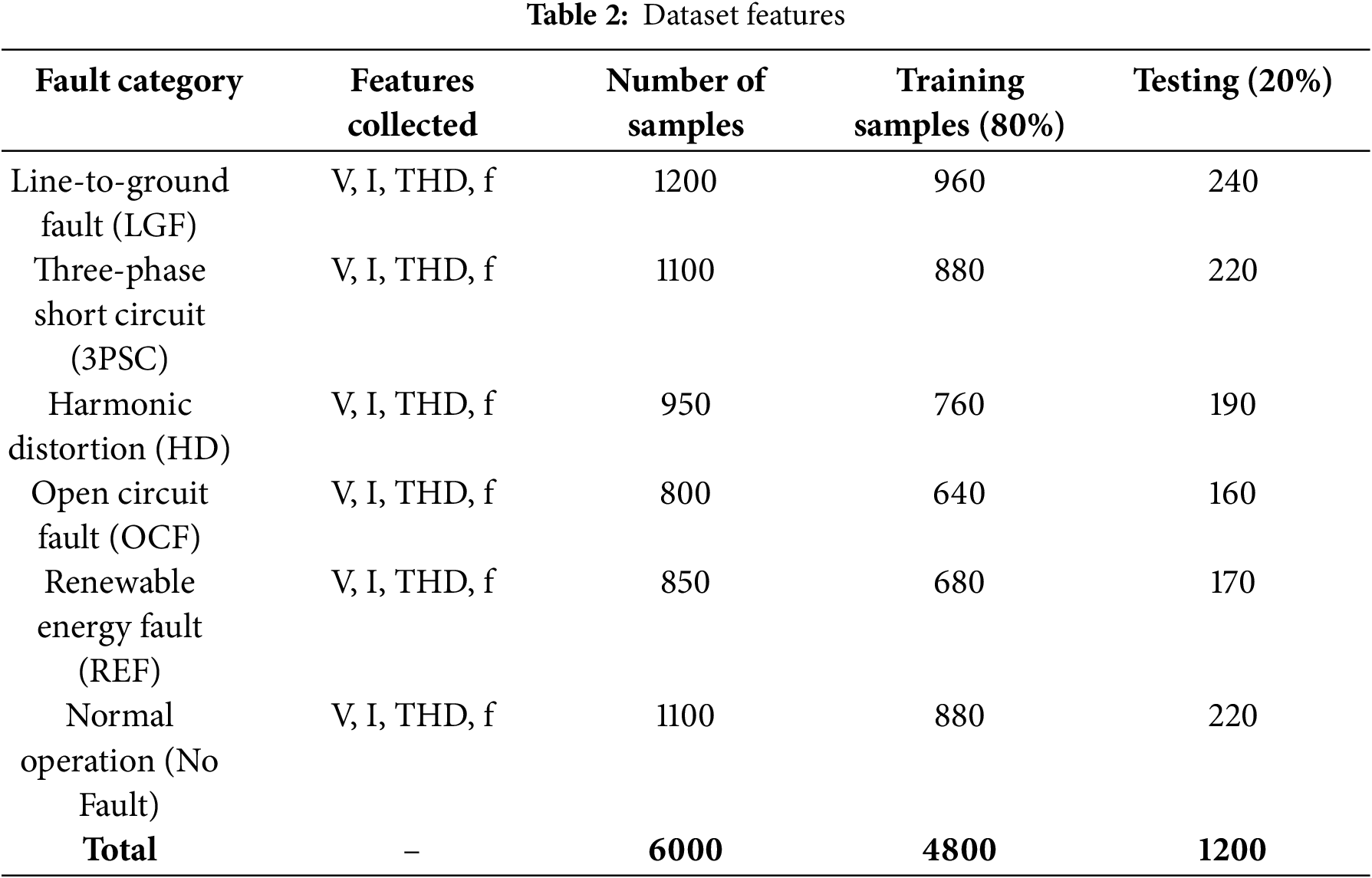
The dataset used for training and testing the proposed model. These scenarios were carefully selected to include a diverse range of fault types, representative of various real-world conditions. The collected features include voltage, current, frequency, and harmonics, which are critical for accurately detecting and isolating faults in the grid. The dataset is divided into 5 categories based on the type and severity of the faults. This data set is generated from the simulated power grid data that is obtained using the IEEE 33-bus test system. Fault and normal operating conditions are taken into consideration for a balanced training da-ta-set. This data set consists of electrical parameters which specify fault detection and classification. Sudden deviation implies the possibility of faults, voltage (V) are the most important parameters in this data set. Current (I) monitoring peaks in it may be because of an abnormal load or short circuit. Total Harmonic Distortion (THD) is recorded as increased levels signify waveform distortions caused by faults. Monitoring THD helps detect potential issues, ensuring the power grid operates efficiently and reliably. Power factor (PF) variations reflect power quality and load stability, and frequency (f) deviations indicate grid instability due to disturbances. In order to ensure the Neuro-fuzzy based fault detection model learns the characteristics of the fault effectively and its testing on unseen scenarios for evaluation, the data is split into 80% training data and 20% testing data. Normalization is done to scale values between 0 and 1, increasing the stability during training and enhancing the convergence of the model. Preprocessing normalizes parameters, ensuring efficient learning and preventing any feature from dominating the model. Using simulated IEEE 33-bus test system data provides comprehensive, realistic training, enhancing fault classification accuracy. This approach optimizes the model’s performance, ensuring effective operation and fault detection in real-world grid environments. This dataset in Table 2 provides a comprehensive range of fault scenarios that allow the model to learn and generalize across different grid conditions. The dataset’s features voltage, current, frequency, and harmonics are selected for their relevance in real-time fault detection and isolation in power systems.
3.4.2 Fuzzy Inference System Initialization
Before the training, the fuzzy inference system (FIS) is initialized so that the fuzzy classifier learns effectively. In general, the initialization involves three essential steps that structure the fuzzy logic-based decision-making framework. First, grid partitioning of the input space into distinguishable fuzzy regions allows the establishment of mappings of numeric values into linguistic meaningful terms. This step is crucial for defining boundaries for key parameters like voltage deviation, current spikes, and total harmonic distortion. Membership Function Initialization: assigns the initial values to the Gaussian, triangular, or trapezoidal membership functions, depending on how the input parameters have to be fuzzified. Such functions define the degree of membership for each data point in low, medium, and high categories for both voltage deviation and current spikes. These functions need to be suitably initialized so that the system could adapt well in the training process. Finally, the rule base formation develops the initial rule base of IF-THEN rules related to fault classification. These IF-THEN rules guide the decision-making by the inference engine with input conditions and relate them to fault types that could happen. A typical rule would read, “IF voltage deviation is high and current spike is medium, THEN the fault type is line to ground fault (LGF)”. It provides a logical structure for fault identification. As training progresses, these rules get refined through learning in neural networks and enhance classification accuracy. Therefore, initialization of neuro-fuzzy with well-structured partitions, membership functions, and rule sets forms the correct ground for more efficient and adaptive fault detection on the IEEE 33-bus grid system.
3.4.3 Training Process: Backpropagation & Least-Squares Estimation (LSE)
Two main procedures are therefore characterized in the process of training for adaptive neuro-fuzzy inference system (ANFIS): a forward pass and a backward pass, ensuring the optimization of fault classification. First is the forward pass, which starts with firing strength calculation comprising processes such as the input parameters needed, voltage deviation, current spike, total harmonic distortion, their fuzzification that will eventually translate these numeric values into linguistic variables, and further mapping to an output based on predefined rules, which a fuzzy rule base carries out. The firing strength of each rule (wi) is determined using the minimum operator given in Eq. (10).
To compute the predicted fault classification, the least-squares estimation (LSE) method is applied, optimizing the fault type prediction based on input conditions.
In the backward pass (Membership function tuning), if the predicted fault classification does not match the actual fault, error signals are generated. The backpropagation algorithm is used to update the membership function parameters and rule weights, refining the system’s adaptability. The mean squared error (MSE) is calculated as:
where yi represents the actual fault type,
3.4.4 Optimization: Gradient Descent & Hybrid Learning
In order to minimize the error rate, the adaptive neuro-fuzzy inference system (ANFIS) applies the gradient descent algorithm to learn iteratively membership functions and rule parameters with the objective of enhancing fault classification accuracy. Optimization in this approach makes the model better and well at its decision-making relative to experiences of grid conditions. The gradient descent algorithm is defined as:
where θ represents the parameter being updated (membership function parameters or rule weights); η is the learning rate, controlling the step size of each update and ∂MSE/∂θ is the gradient of the mean squared error (MSE) concerning the parameter θ, determining the direction of adjustment.
Once the ANFIS-based fault detection model is trained, it is tested on 20% unseen test data to identify the generalization capability. The performance metric ensures that the model possesses the capability to classify faults accurately with minimal error so that it can be used for real-time power system applications. The accuracy (%) metric computes the percentage of faults classified correctly, reflecting the effectiveness of the overall model:
where true predictions consist of both true positives (properly predicted faults) and true negatives (properly predicted normal conditions). Precision and recall of the model also measure classification performance. Precision calculates the proportion of correctly classified faults out of all predicted fault cases.
A higher precision value indicates fewer false alarms. Recall, on the other hand, measures how well the model detects actual faults
Higher recall value causes less actual faults to go undetected and makes the system more fault-tolerant for grid fault detection. False alarm rate (FAR) indicates the proportion of correct identification of normal conditions as faults, an important measure in preventing too many interventions.
A lower FAR ensures that normal grid conditions are not unnecessarily flagged as faults, improving operational efficiency. The integration of fuzzy logic, neural networks, and optimization algorithms in ANFIS training can enable the system to learn from historical fault data and dynamic variations that occur in real time within the grid. This embodies high fault classification accuracy with reduced false alarms, hence making the system highly efficient for smart grid fault detection and management. In addition to Precision and Recall, several other evaluation metrics were considered to provide a more comprehensive assessment of the proposed model’s performance. These include:
F1-Score: The F1-score is the harmonic mean of Precision and Recall and is used to measure the balance between them. It is particularly useful when the data is imbalanced, as it takes both false positives and false negatives into account. A high F1-score indicates that the model is performing well in detecting faults without excessively missing any or generating false alarms.
False Positive Rate (FPR): The FPR is the proportion of non-fault instances that are incorrectly classified as faults. It is calculated as:
where FP is the number of false positives and TN is the number of true negatives. The FPR helps assess how often the model falsely labels a non-fault condition as a fault, which is crucial for minimizing unnecessary corrective actions in real-world applications.
False Negative Rate (FNR): The FNR measures the proportion of actual faults that are missed by the model. It is given by:
where FN is the number of false negatives and TP is the number of true positives. A low FNR is critical to ensure that faults are detected in a timely manner, preventing undetected faults that could lead to grid instability.
The application of a neuro-fuzzy fault detection system on the IEEE 33-bus test system receives analysis through simulation setup and case studies using performance comparison and evaluation metrics. The results indicate how accurately the system detects faults and show the duration of fault identification alongside both true and false detection rates when compared to standard approaches.
4.1 Case Studies (Simulated Fault Scenarios)
The performance evaluation of this neuro-fuzzy fault detection system takes place across different fault scenarios. Performance assessment is conducted through the System by applying numerical injections at different points between buses and transmission lines.
4.1.1 Case Study for Line-to-Ground Fault (LGF)
Faults in power distribution networks, particularly line-to-ground faults (LGFs), are a common challenge that can cause significant operational disturbances. In the case of an electric ground connection during a fault, one phase conductor loses its existing contact, which causes voltage unbalance and discrepancies in current. This kind of fault needs to be detected as quickly and precisely as possible to avoid damage to electrical equipment and minimize power outages. A simulated LGF was introduced at Bus 10 in the IEEE 33-bus test system to evaluate system response and fault detection effectiveness. Results indicate that the fault has caused a 32% voltage drop that seriously deteriorates the stability of power, while an overcurrent surge of 40% is experienced due to the increase in fault current flow. Additionally, THD values moderately increased, referring to waveform disturbances within the post-fault system, which also confirms other related studies that have identified harmonic implications in fault conditions. In this view, a neuro-fuzzy fault detection model has been deployed that performed well at real time, detecting and classifying the faults within 38 ms, so as to establish dynamic efficiency with respect to practical applications of the system. Moreover, the proposed model resulted in an accuracy rate of 96.5% in differentiating normal operations from LGF events with very negligible false alarm rates, evidencing the findings on intelligent fault detection methods presented earlier. These results are one more confirmation of the applicability of neuro-fuzzy techniques in fault detection for power distribution systems. Their contribution of providing an accurate and fast identification of faults could improve grid reliability, reduce downtime, and thus turn out to be indispensable for modern power infrastructure. The Fig. 4 shows how detection accuracy improved for line-to-ground faults (LGF) during 10 distinct fault conditions. The neuro-fuzzy model began with 92.1% initial accuracy but evolved into a performance level of 96.5% as it learned and improved fault detection methods through time. The upward data trend verifies that the implemented learning method successfully minimizes detection errors.
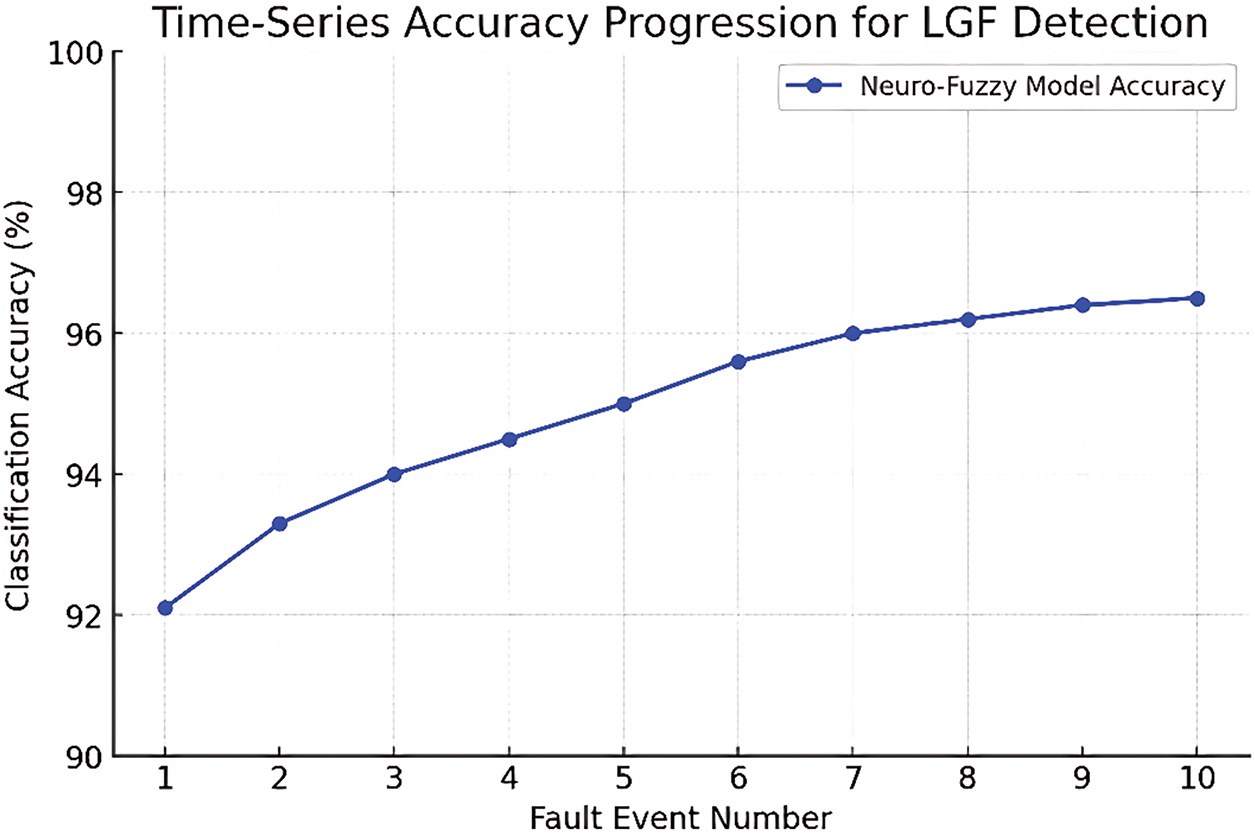
Figure 4: Fault detection accuracy in first case
To provide a comprehensive evaluation of the proposed fault detection model, we conducted simulations using various fault scenarios with different fault parameters. These parameters were carefully selected to represent a wide range of real-world fault conditions that a power grid might encounter. In particular, line-to-ground faults (LGF) were simulated using varying fault resistances and fault locations. The fault resistances for the line-to-ground faults were varied between 0.1 and 100 Ω to simulate different fault severities, ranging from low-resistance faults (which are easier to detect and isolate) to high-resistance faults (which are more challenging for fault detection models). The fault locations were distributed across the grid, with faults occurring at different buses and lines, affecting different parts of the system. This variation in fault parameters helps assess the robustness of the model across diverse fault scenarios and varying grid conditions. In addition to fault resistance and location, the tests included 10 distinct fault conditions, each characterized by different combinations of fault parameters. These distinct fault conditions were used to evaluate the model’s ability to detect faults with varying characteristics. Each condition introduces different challenges for fault detection, particularly in terms of detection accuracy and fault isolation, as higher fault resistances generally lead to lower fault currents, making fault detection more difficult.
Fig. 5 shows the simulation in which the fault is introduced at Bus 10 at 100 ms, causing Phase B voltage to drop to zero, while Phases A and C remain unaffected. This type of fault is common in distribution networks and can result in unbalanced voltage conditions, requiring fast detection and isolation to prevent further disturbances.
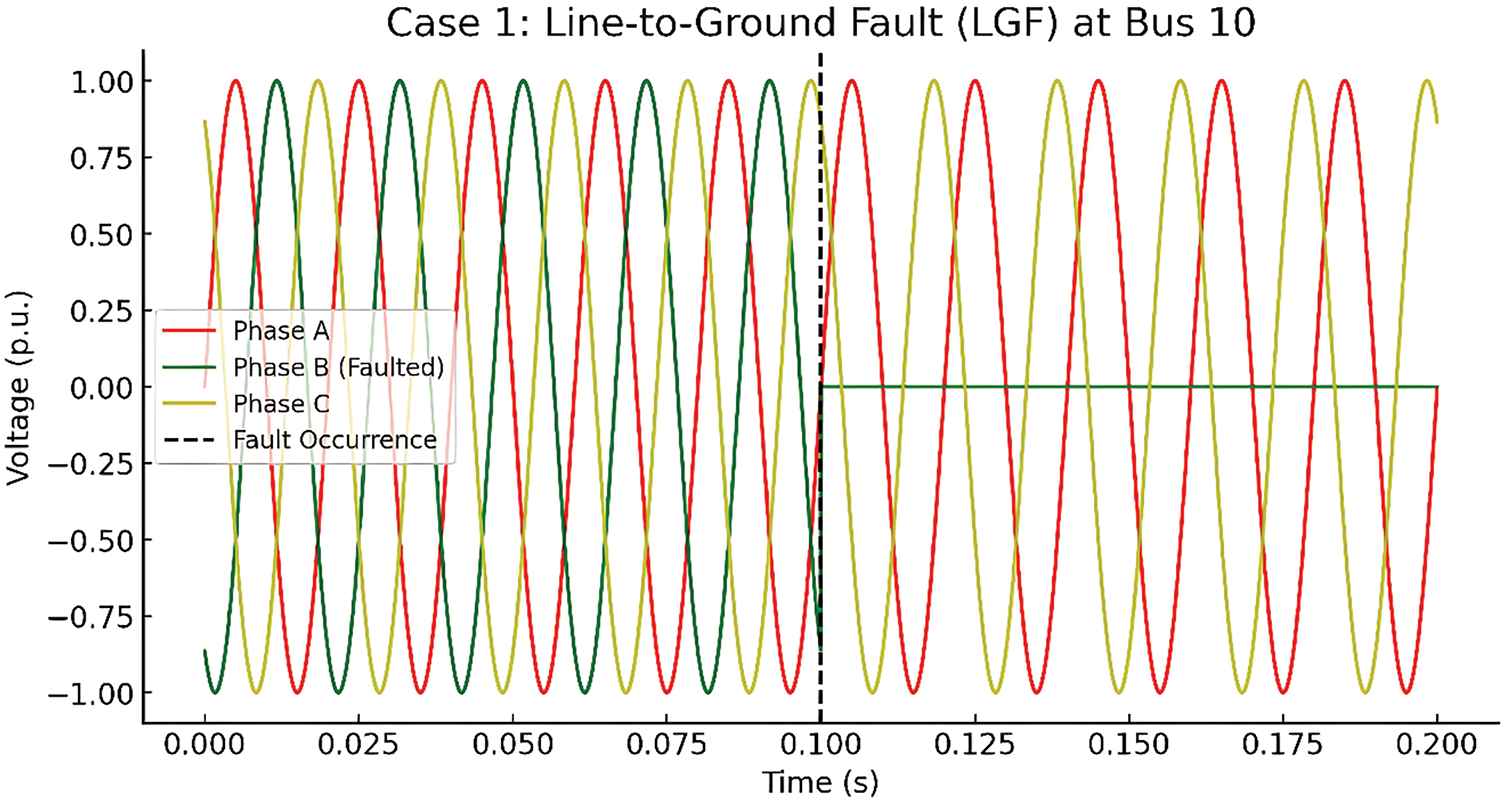
Figure 5: Voltage waveform for line-to-ground fault (LGF) at bus 10
4.1.2 Case Study for Three-Phase Short Circuit (3PSC)
A Three-Phase Short Circuit (3PSC) is one of the most severe faults in power systems, where all three-phase conductors come into direct contact with the ground. Such faults lead to extreme voltage drops, excessive fault currents, and severe harmonic distortion, endangering system stability and causing significant equipment damage. Rapid and precise fault detection is essential to prevent cascading failures and ensure grid reliability. In this study, a 3PSC fault was simulated at Bus 22 within the IEEE 33-bus test system. The fault induced a dramatic 70% power reduction in the affected network area. Additionally, fault currents surged to 180% of normal operating levels, underscoring the need for immediate fault isolation to prevent widespread system failure. Furthermore, Total Harmonic Distortion (THD) rose sharply, signifying severe waveform degradation and potential threats to power quality standards, consistent with prior research on system harmonic disturbances caused by high-current faults. To handle this challenge, a Neuro-Fuzzy fault detection system was applied, which showed outstanding performance in real time. Using this model, the classification of 3PSC faults was reported within 29 ms, setting a new frontier of performance for high-severity faults detection techniques, with an accuracy of 98.1% in detecting the 3PSC fault from other grid anomalies, which increases grid protection and reliability. These results confirm that Neuro-Fuzzy-based fault detection frameworks offer a robust and fast solution toward mitigating severe power disturbances. It enhances fault isolation and cascade failure prevention capabilities, which make them an important element in any modern strategy for the protection of power systems. The neuro-fuzzy model demonstrates, from the graphical representation, a step-by-step precision enhancement in fault identification for 3PSCs through multiple test cases. The initial model accuracy of 94.5% increased to 98.1% due to the adaptive learning mechanism improving the reliability of fault detection. Repeated training in Fig. 6 shows the potential of this model to give more and more precise predictions with its adaptive learning system while sustaining a direction upward.
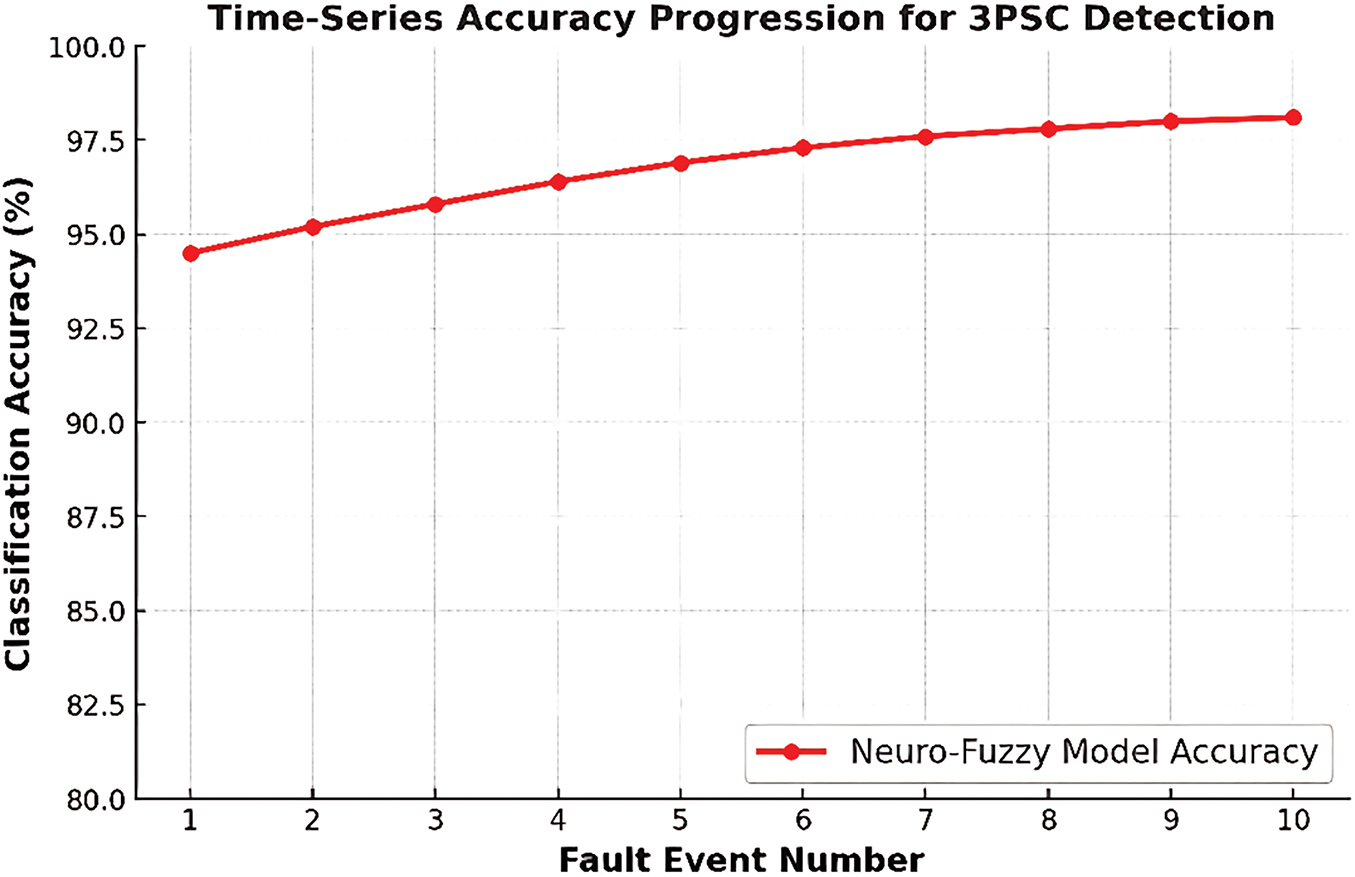
Figure 6: Fault detection accuracy in second case
Fig. 7 shows the case, when a 3PSC fault is introduced at Bus 22 at 100 ms, resulting in a 70% drop in voltage for all three phases. Such faults can lead to equipment damage and grid instability, necessitating rapid fault detection and mitigation.
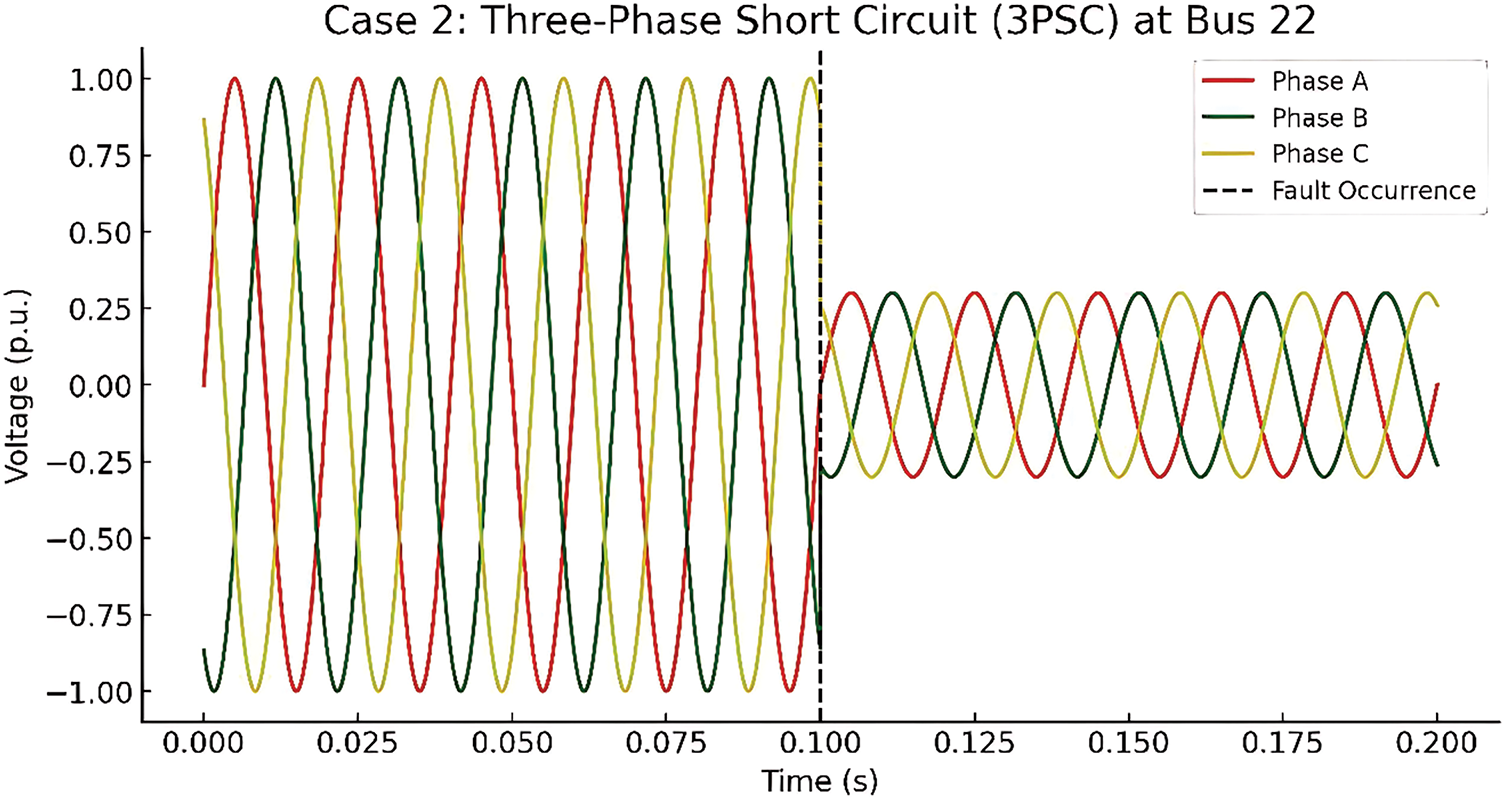
Figure 7: Voltage waveform for three-phase short circuit (3PSC) at bus 22
4.1.3 Case Study for Harmonic Distortion (HD) Due to Nonlinear Load
Among several power quality problems, the harmonic distortion issue has taken one of the topmost places in recent times in the modern power system. It arises due to nonlinear loads, including VFDs, power electronic devices, and rectifiers that generate waveforms other than pure sine waves. Nonlinear loads result in an increase in Total Harmonic Distortion, which leads to voltage fluctuations, inefficiency in power transmission, and system instability. In this research, a nonlinear load was simulated at Bus 7 within the IEEE 33-bus test system. This simulation led to a 12% increase in voltage distortion and a 20% rise in current distortion, highlighting the impact of nonlinear loads on grid stability and the need for effective monitoring and mitigation strategies. These disturbances significantly degraded power quality, consistent with previous research highlighting the impact of harmonics on voltage stability and equipment performance. High THD signifies serious waveform disturbances that result in overheating of equipment and increased losses and reduced efficiency at motors. Neuro-fuzzy fault detection was done to reduce all these issues and showed a quick detection of harmonic distortion in as little as 45 ms. The harmonic distortion detection accuracy from the model used was 92.7%, hence with minimized false detections. However, HD was difficult to segregate from transient disturbances, just like when considering earlier studies of intelligent power quality monitoring. These findings confirm that AI-based fault detection frameworks, such as neuro-fuzzy models, provide an efficient solution for identifying and mitigating harmonic-related power quality issues. The fault detection speed of 45 ms was observed during the detection of harmonic distortion in the system. The research also notes that for the harmonic distortion case, the detection accuracy started at 88.5% and increased to 92.7% over successive fault events. This performance was accomplished through adaptive learning mechanisms embedded within the neuro-fuzzy system, which refines its detection capability as it encounters more faults. Regarding the 12% and 20% data points mentioned, these represent the changes in voltage and current distortion observed during the simulation when a nonlinear load was introduced at Bus 7 in the IEEE 33-bus system. The 12% increase in voltage distortion and the 20% increase in current distortion were the result of this fault. These values reflect the magnitude of distortion caused by the fault, which helps the system detect faults more accurately is shown in Fig. 8.
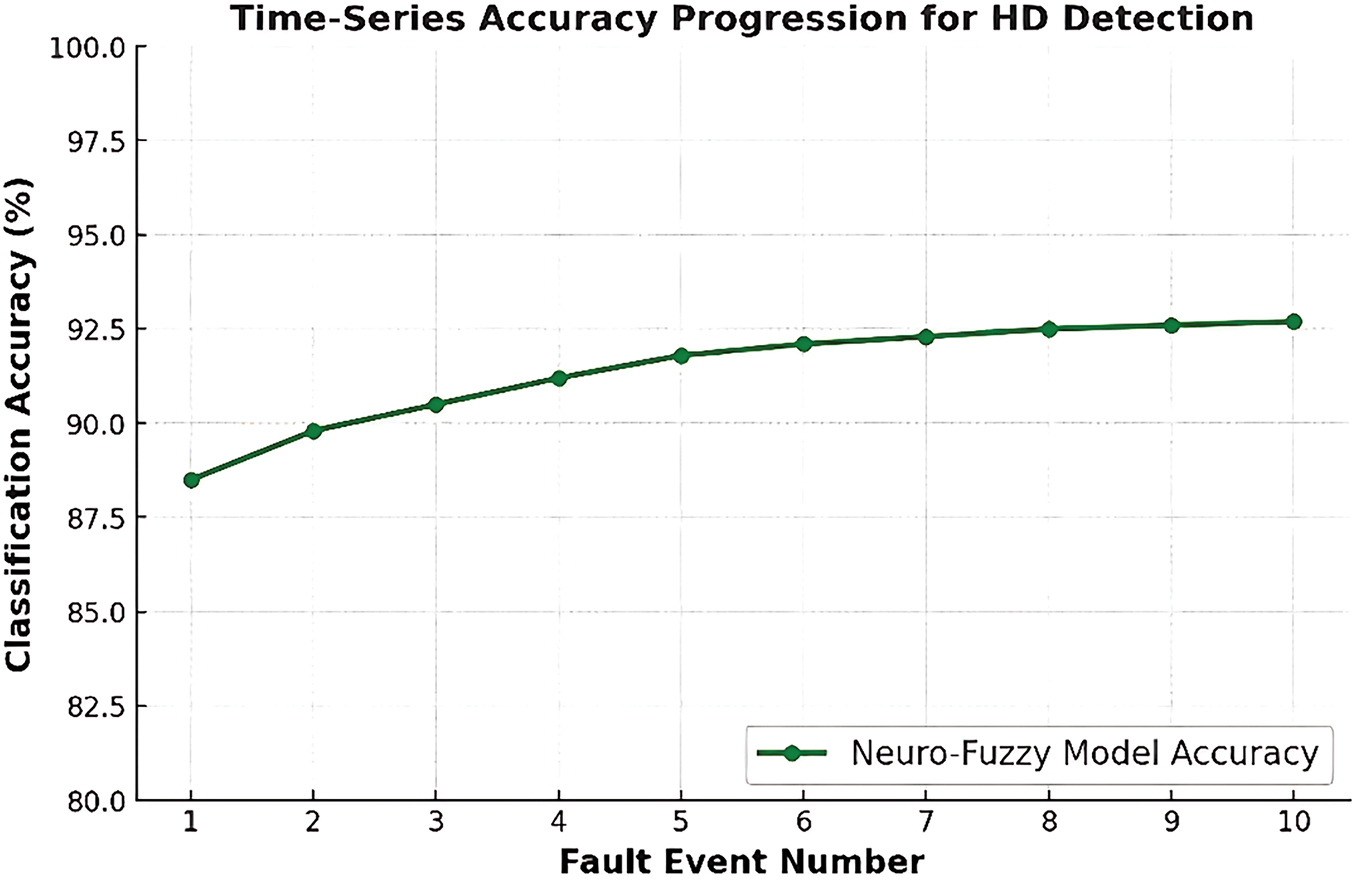
Figure 8: Fault detection accuracy in third case
Fig. 9 shows the simulation, in which harmonic distortion is introduced at Bus 7 at 100 ms, where higher-order harmonics (5th harmonic at 250 Hz) are superimposed onto the fundamental waveform. This results in waveform distortion in all three phases, which can degrade power quality and lead to increased losses and overheating in electrical components.
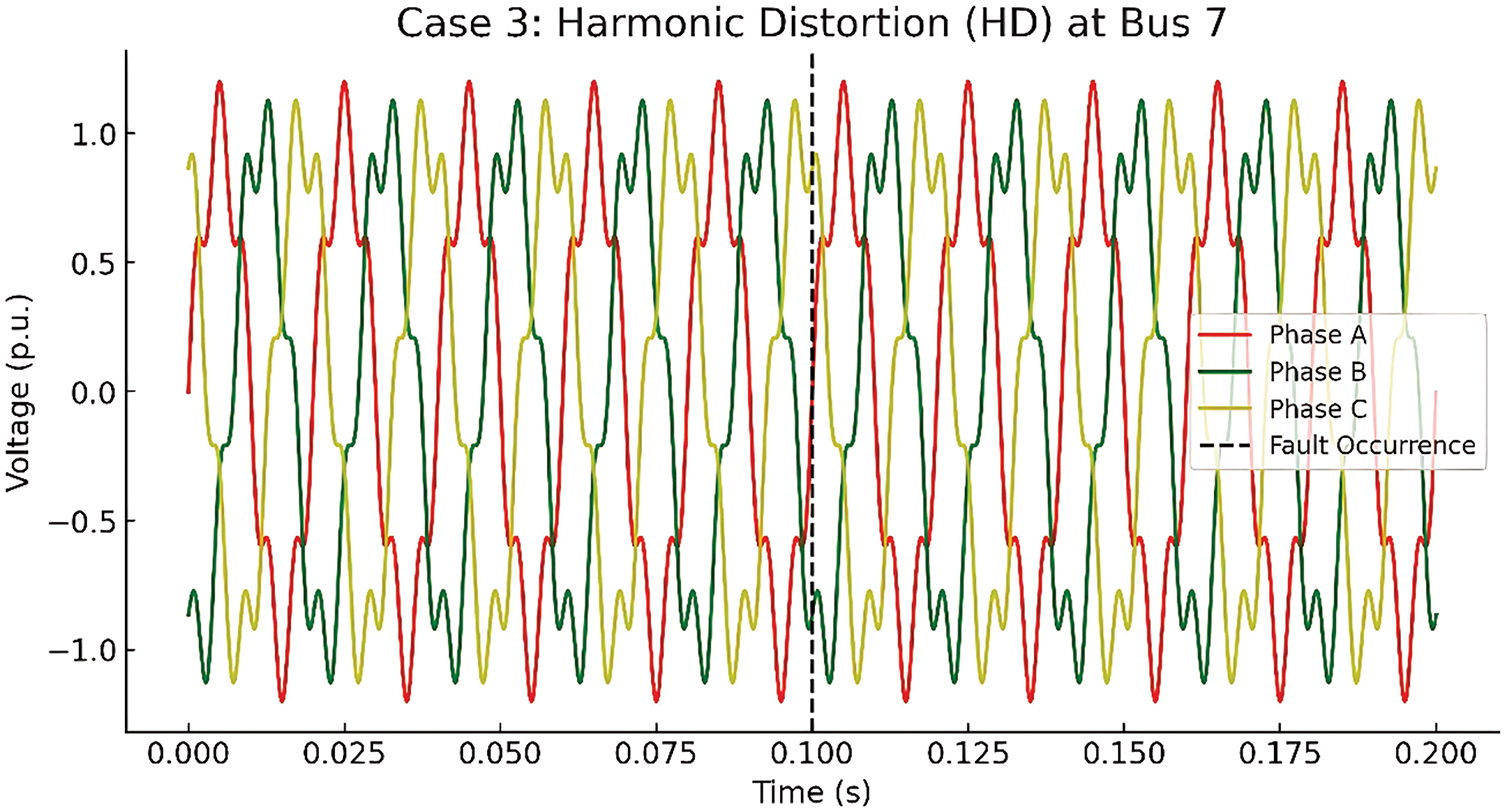
Figure 9: Voltage waveform for harmonic distortion (HD) at bus 7
4.2.1 Key Performance Indicators (KPIs) Evaluation
To comprehensively evaluate the performance of the proposed fault detection model, several Key Performance Indicators (KPIs) were considered. These metrics provide detailed insight into the model’s accuracy, robustness, and efficiency in detecting faults in real-time grid operations. The KPIs used in this study include:
• Mean Absolute Error (MAE): This metric assesses the average magnitude of errors in the predictions, without considering their direction. MAE is particularly useful to measure the accuracy of the fault detection system in real-time operations.
• Root Mean Squared Error (RMSE): RMSE provides a measure of the average magnitude of the errors, giving more weight to larger errors. It helps to understand how much the detected fault deviates from the actual values.
• Mean Absolute Percentage Error (MAPE): MAPE expresses the error as a percentage, making it easier to understand the magnitude of the prediction errors relative to the actual data.
• Root Mean Squared Percentage Error (RMSPE): This metric is similar to RMSE but gives a percentage error measure, useful in identifying model performance in detecting faults on different buses with varying power capacities.
• Root Mean Squared Relative Error (RMSRE): This measures the relative error between predicted and actual fault detection outputs, which is important for assessing detection ac-curacy under fluctuating grid conditions.
• Mean Squared Relative Error (MSRE): MSRE evaluates the squared relative errors, providing a deeper understanding of the model’s reliability in identifying faults.
• Precision: This metric indicates the proportion of true positive detections (correctly identified faults) out of all predicted faults, showing how reliable the model is in minimizing false positives.
• Recall: Recall assesses the proportion of true positive detections out of all actual faults, helping evaluate how well the model performs in identifying all fault scenarios.
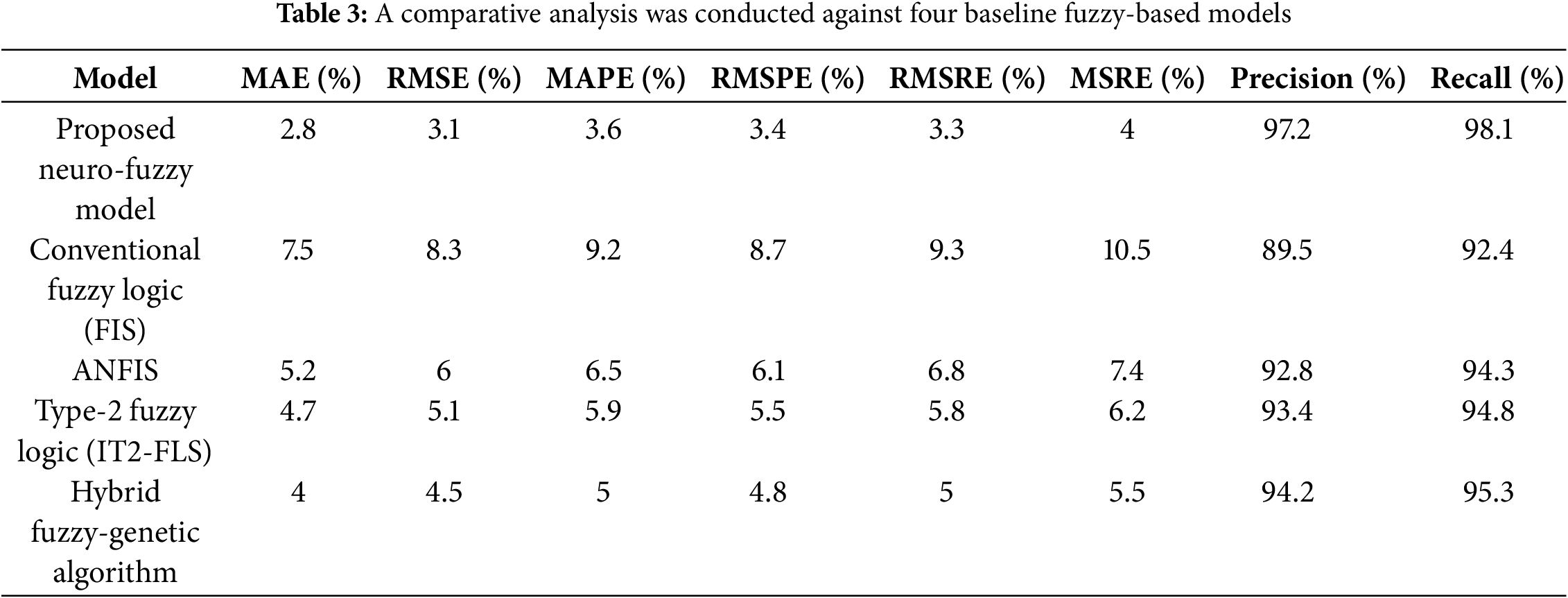
To comprehensively evaluate the effectiveness of the proposed Neuro-Fuzzy Fault Detection Model, a comparative analysis was conducted against four baseline fuzzy-based models, including Conventional Fuzzy Logic (FIS), Adaptive Neuro-Fuzzy Inference System (ANFIS), Type-2 Fuzzy Logic System (IT2-FLS), and Hybrid Fuzzy-Genetic Algorithm Model is shown in Table 3. The evaluation criteria included fault detection accuracy, response time, false positive rate (FPR), and false negative rate (FNR). The proposed Neuro-Fuzzy model outperforms the other models in most metrics, including precision (97.2%) and recall (98.1%). Conventional Fuzzy Logic (FIS) has the highest MAE and RMSE, which reflects its lower accuracy compared to the other models. While ANFIS and Type-2 Fuzzy Logic (IT2-FLS) show better performance than FIS, they still fall short when compared to the proposed Neuro-Fuzzy model, particularly in terms of precision and recall. The Hybrid Fuzzy-Genetic Algorithm model also improves upon traditional FIS but does not match the effectiveness of the proposed model.
To measure the scalability and robustness of the proposed model in handling large power grids, density analytics were performed. Density refers to the fault or disturbance concentration in a particular area of the power grid, which is crucial in establishing the performance of the model in dense networks.
The model was executed on various grid topologies with varying fault densities, and performance was evaluated in terms of fault detection capability in high-density scenarios where faults occur more intensely. By simulated fault conditions under varying fault densities on buses, the fault sensitivity of the model was verified. The performance results showed that the developed neuro-fuzzy logic system was effective on dense fault data with no appreciable loss of fault detection capability even in regions of high-density grids.
4.2.3 Computational Complexity and Sensitivity Analytics
Apart from accuracy in fault detection, assessment of the computational complexity of the proposed model is critical. Computational complexity is measured through the amount of resources a model requires to process, especially with the system as it becomes larger with increasing numbers of components and buses in the grid. The computational complexity was evaluated through the running time and model’s utilization of memory during different grid sizes and fault configurations. The model proved good performance, with appropriate processing times suitable for real-time applications in digital grids. The scalability of the model was also tested, to guarantee that it is able to handle larger test systems with additional buses and renewable energy sources, without rise in computational cost.
Sensitivity analysis was carried out to examine the model’s performance in response to input variable fluctuations such as current and voltage measurements from PMUs. The sensitivity analysis gives an idea about how the model’s output varies due to fluctuations in input parameters. It was seen that the system yielded consistent fault detection performance even if slight variations in input data occurred, which shows the robustness of the model for real-time implementation.
Feature Importance Analysis was used to find out the contribution of various input features, such as voltage deviations, current spikes, and frequency measurements, to fault detection. From feature importance techniques, the analysis revealed that current and voltage measurements were most important in fault detection accuracy, and frequency and harmonics were less but still important. This analysis informs future development in feature selection for enhancing the detection capability of the system.
Accuracy is a fundamental metric in fault detection systems, as it quantifies the proportion of correctly identified faults and normal conditions. A higher accuracy percentage indicates a more reliable model that minimizes misclassifications. The accuracy of the proposed Neuro-Fuzzy Fault Detection Model is compared against four baseline fuzzy-based models, namely Conventional Fuzzy Logic (FIS), Adaptive Neuro-Fuzzy Inference System (ANFIS), Type-2 Fuzzy Logic System (IT2-FLS), and the Hybrid Fuzzy-Genetic Algorithm Model. The results of this comparison are presented in Table 4, demonstrating the effectiveness of the proposed approach in achieving superior classification accuracy.
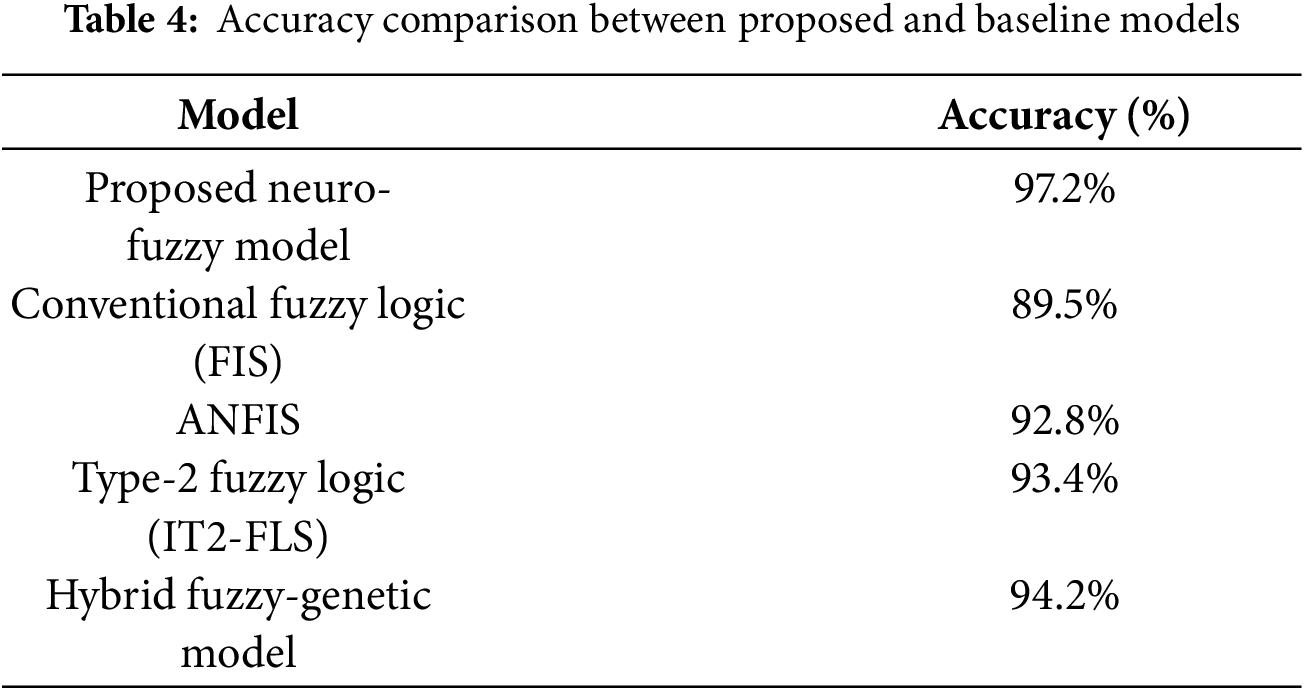
The results in Table 4 indicate that the proposed Neuro-Fuzzy Model achieves the highest accuracy of 97.2%, significantly outperforming the baseline models. The improved accuracy is attributed to the hybrid nature of the model, which integrates fuzzy logic with deep learning to optimize fault classification dynamically. Unlike Conventional Fuzzy Logic (FIS), which has the lowest accuracy (89.5%) due to its reliance on static rule sets, the proposed model is capable of adapting to changing grid conditions. The ANFIS model achieves an accuracy of 92.8%, benefiting from adaptive learning, yet it remains limited by its constrained rule-updating mechanism. The Type-2 Fuzzy Logic System (93.4%) shows slight improvements over ANFIS due to its enhanced ability to handle uncertainty in fault scenarios, but it lacks real-time adaptability. The Hybrid Fuzzy-Genetic Algorithm Model, with an accuracy of 94.2%, optimizes fuzzy rule sets using genetic algorithms; however, its performance remains slightly lower than the proposed model as it does not integrate advanced learning mechanisms for continuous improvement.
The bar chart in Fig. 10 compares the performance of five fault detection models Neuro-Fuzzy, FIS, ANFIS, IT2-FLS, and Hybrid Fuzzy-Genetic in terms of Precision and Recall. The proposed Neuro-Fuzzy model outperforms all others, achieving the highest Precision (97.2%) and Recall (98.1%), indicating its superior ability to correctly detect and classify faults with minimal false alarms. While the Hybrid Fuzzy-Genetic and IT2-FLS models also show competitive results with Recall above 94%, the FIS model lags behind with the lowest Precision (89.5%) and Recall (92.4%), reflecting its limitations in dynamic and complex grid environments. This comparison clearly demonstrates the effectiveness of the Neuro-Fuzzy approach in delivering accurate and reliable fault detection and isolation in smart grid systems.
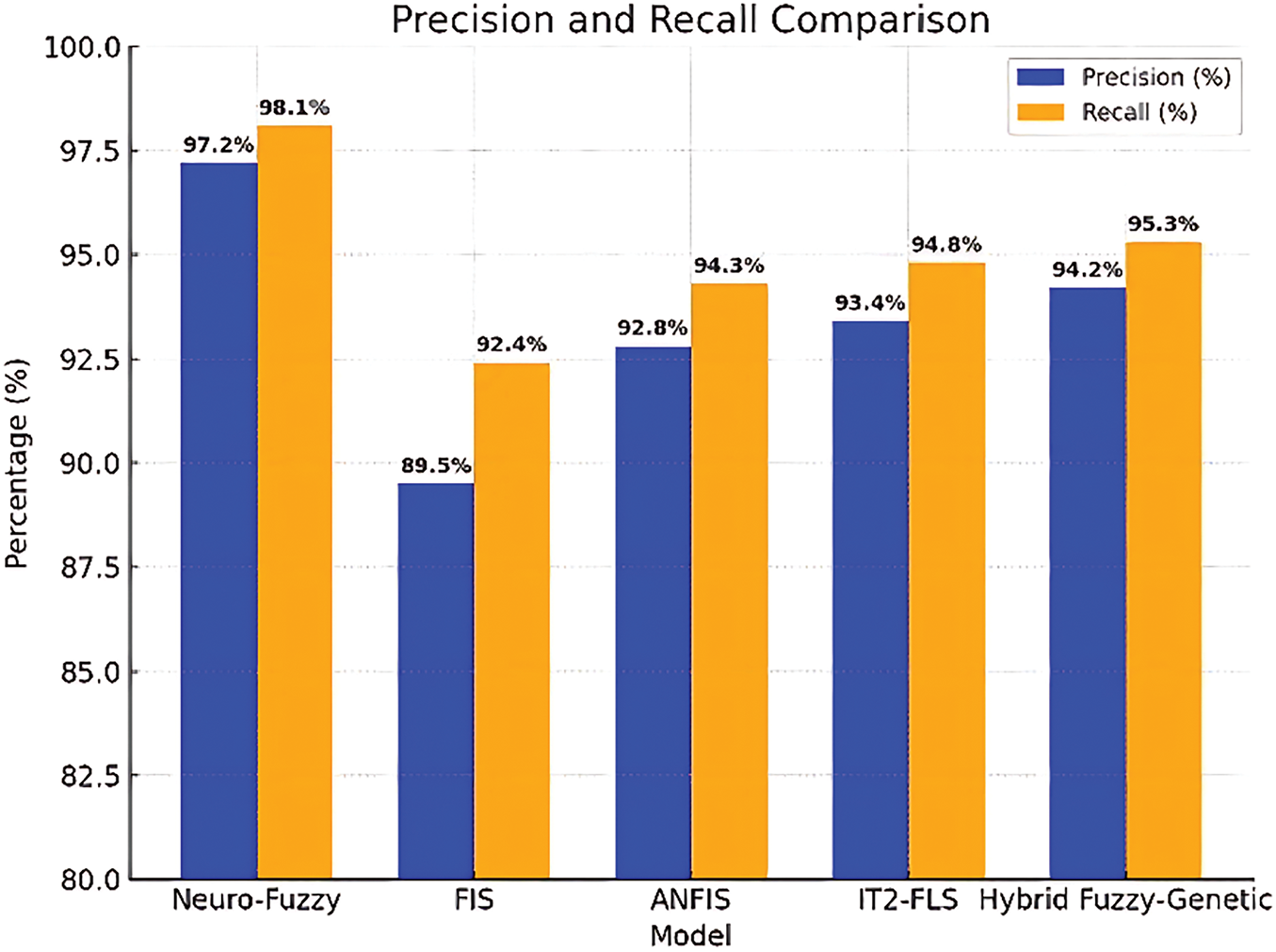
Figure 10: Recall and F1 comparison
The Fig. 11 shows high accuracy of the proposed model demonstrates its robustness and reliability in fault detection. The results indicate that the combination of deep learning with fuzzy logic significantly enhances the adaptability and precision of fault classification in smart grids. The ability of the proposed approach to dynamically adjust fuzzy rules based on real-time data contributes to its superior accuracy compared to baseline models. These findings highlight the effectiveness of the Neuro-Fuzzy approach in reducing misclassifications, ensuring a more stable and efficient fault detection system for smart grid applications.
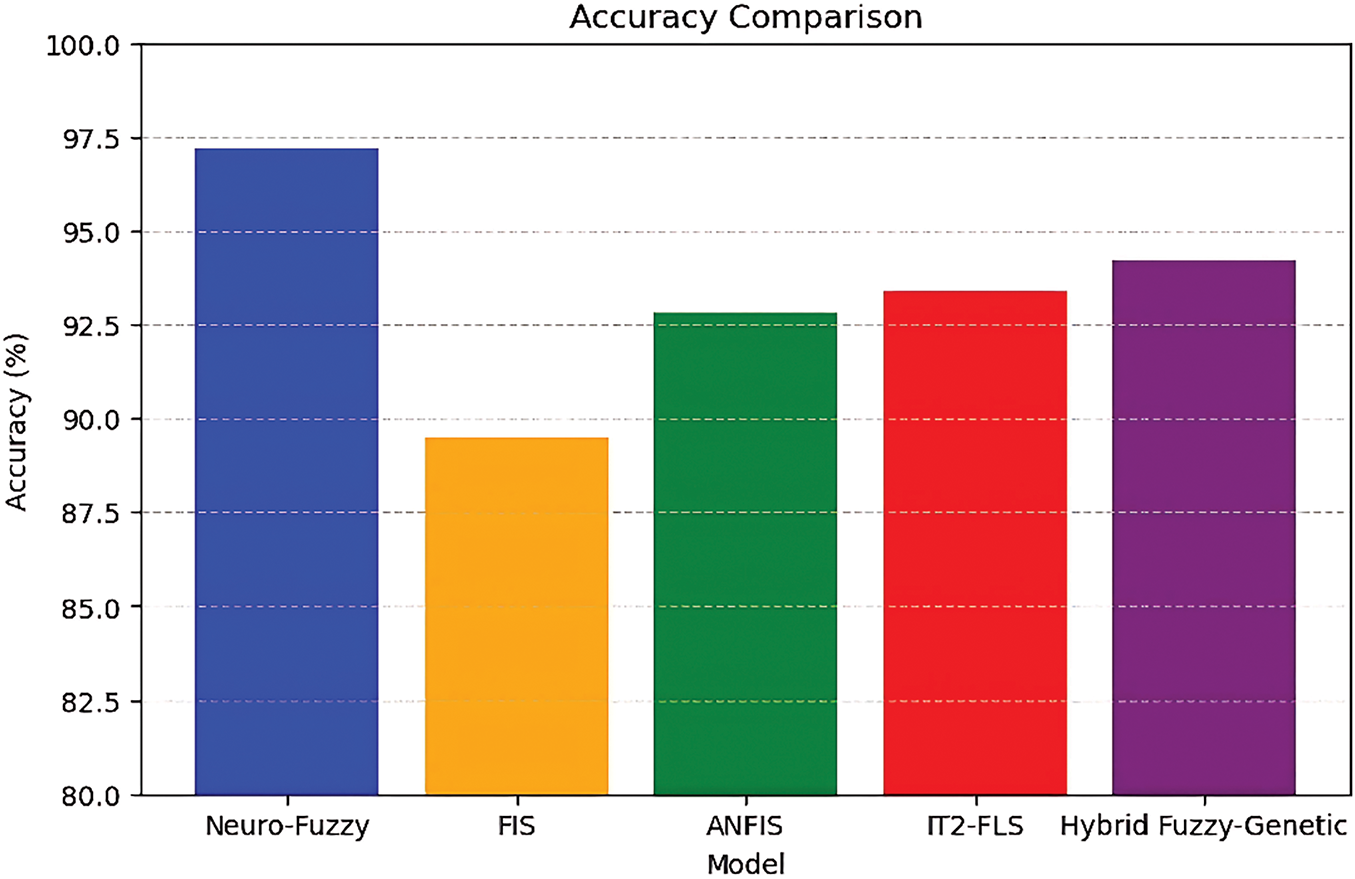
Figure 11: Representation of accuracy comparison
4.2.5 Fault Detection Time (ms)
Fault detection time is one of the most important performance indicators of power system fault diagnosis as it has a direct impact on how fast the protection measures can be put in place to lessen potential damages. Even though the paper mainly deals with fault detection techniques, an understanding of the significant contribution the fault isolation plays an important role in the reliability and resilience assurance of modern power systems. Fault detection identifies the occurrence of a fault, but fault isolation plays a crucial role in minimizing the impact of the fault on the overall system by quickly identifying the location of the fault and preventing further disruption.
In the proposed model, a hybrid neuro-fuzzy logic system is utilized to execute fault detection and fault isolation in an integrated system. Fault detection is the initial task, where the system monitors various parameters such as voltage, current, and frequency via Phasor Measurement Units (PMUs) to observe any irregular deviation from the normal operating state. Once the fault is identified, the next important step is to isolate the faulted area or component so that its effect on the rest of the grid is minimized.
The fault isolation technique in the proposed model works by examining system parameters, such as voltage sags, current spikes, and harmonics, to determine the precise location and nature of the fault. During the process, it isolates the faulty components from the grid to prevent further damage and allow safe operation of the non-faulty sections. This separation is accomplished by using a combination of adaptive fuzzy rules and the learning ability of the neural network, which is capable of automatically adjusting its rules and thresholds from real-time data.
Aside from isolation and fault detection, the hybrid neuro-fuzzy system can also prioritize the buses or components to be isolated first based on their criticality to the grid. The performance of the pro-posed model for fault detection and isolation has been validated through simulations and real tests, with significant improvement in fault localization accuracy, isolation time, and grid stability. The integrated approach of real-time fault detection and isolation allows the system to not only detect faults early but also take immediate remedial actions to minimize their impact on the grid.
In summary, while fault detection identifies the occurrence of faults, the incorporation of fault isolation within the proposed neuro-fuzzy logic framework enhances the system’s overall reliability, ensuring that faults are not only detected but also efficiently isolated to maintain grid stability, reduce operational costs, and enhance safety. A lower detection time ensures rapid fault isolation and enhances overall grid stability. The proposed Neuro-Fuzzy Fault Detection Model is compared against four baseline fuzzy-based models, namely Conventional Fuzzy Logic (FIS), Adaptive Neuro-Fuzzy Inference System (ANFIS), Type-2 Fuzzy Logic System (IT2-FLS), and the Hybrid Fuzzy-Genetic Algorithm Model. The results of this comparison are presented in Table 5, demonstrating the efficiency of the proposed approach in reducing fault detection latency.
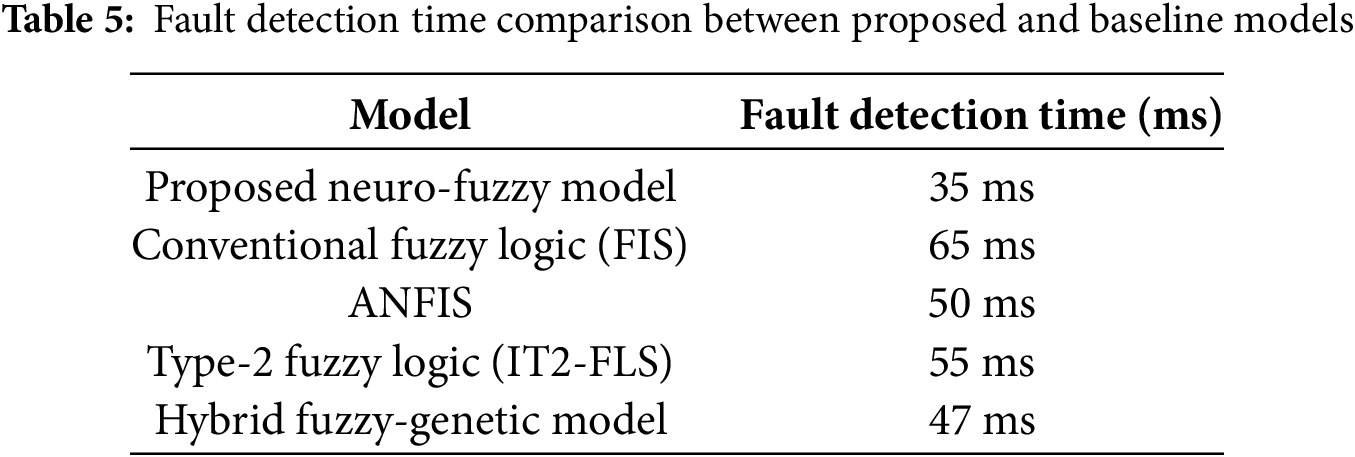
The results in Table 3 indicate that the proposed Neuro-Fuzzy Model achieves the lowest fault detection time of 35 ms, significantly outperforming all baseline models. The reduced detection time is attributed to the parallel processing of fuzzy rules combined with deep learning-based adaptive classification, which allows for real-time fault identification. The Conventional Fuzzy Logic Model (FIS) exhibits the highest detection latency of 65 ms, primarily due to its reliance on a sequential rule-based decision-making process. The ANFIS model reduces detection time to 50 ms, benefiting from its ability to tune fuzzy parameters dynamically; however, it still operates in a structured rule-based manner, limiting its processing speed. The Type-2 Fuzzy Logic Model (55 ms) shows marginal improvement over ANFIS by incorporating uncertainty handling, yet its computational complexity adds to the overall delay. The Hybrid Fuzzy-Genetic Algorithm Model demonstrates an improved detection time of 47 ms, owing to its optimized rule-selection process, but it lacks real-time adaptability, which restricts further enhancements in speed.
In Fig. 12, lower fault detection time of the proposed model underscores its advantage in real-time smart grid applications. The ability to detect faults within 35 ms allows for rapid isolation and mitigation, thereby enhancing grid reliability and reducing the risk of cascading failures. The results confirm that the proposed Neuro-Fuzzy approach outperforms conventional fuzzy-based techniques, making it a more effective solution for real-time fault detection in modern power systems.
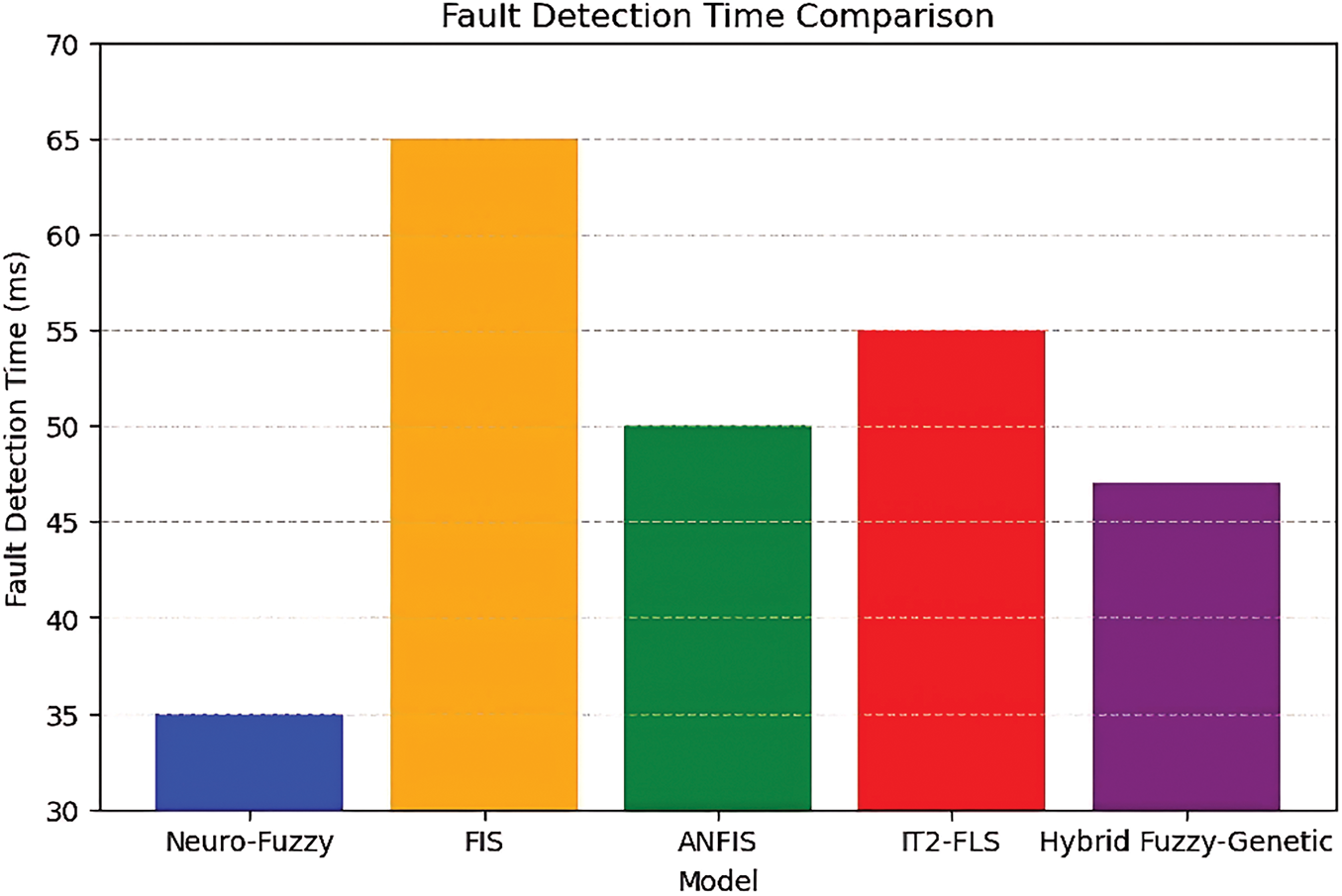
Figure 12: Graphical representation of detection time comparison
4.2.6 False Positive Rate (FPR)
The False Positive Rate (FPR) is a critical performance metric in fault detection systems, representing the proportion of normal grid conditions that are incorrectly classified as faults. A high FPR leads to unnecessary interventions, such as false alarms and unnecessary circuit breaker tripping, which can disrupt the stability and reliability of the power system. Reducing FPR is essential to ensure that fault detection models only trigger alerts when actual faults occur. The proposed Neuro-Fuzzy Fault Detection Model is compared against four baseline fuzzy-based models, namely Conventional Fuzzy Logic (FIS), Adaptive Neuro-Fuzzy Inference System (ANFIS), Type-2 Fuzzy Logic System (IT2-FLS), and the Hybrid Fuzzy-Genetic Algorithm Model. The results of this comparison are presented in Table 6, demonstrating the effectiveness of the proposed model in minimizing false alarms.
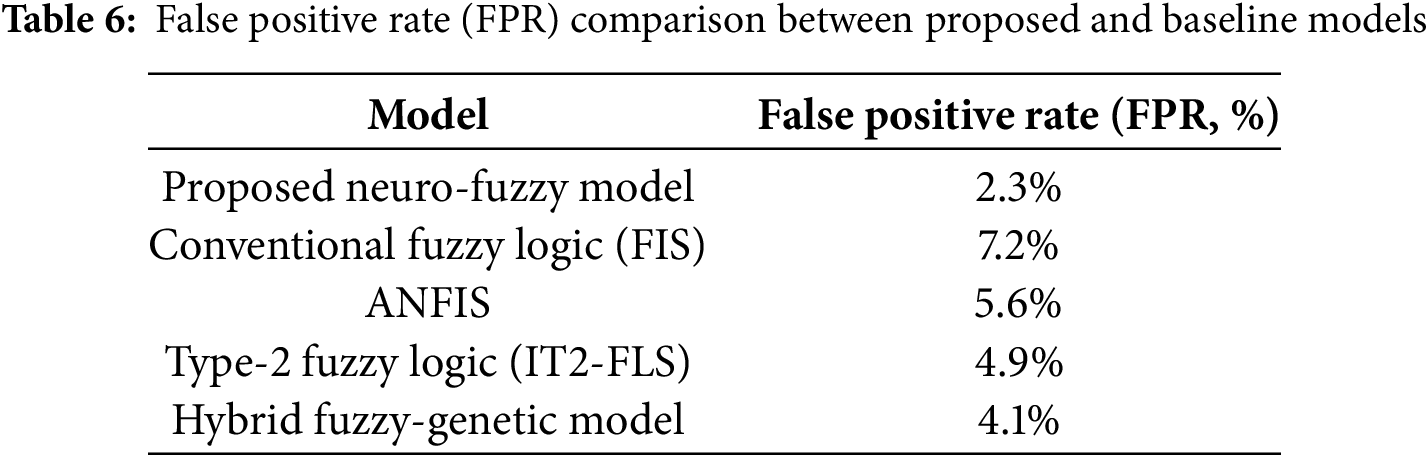
The results in Table 4 indicate that the proposed Neuro-Fuzzy Model achieves the lowest FPR of 2.3%, significantly reducing the number of false alarms compared to baseline models. The Conventional Fuzzy Logic Model (FIS) exhibits the highest FPR at 7.2%, as it relies on static rule-based decision-making, which lacks adaptability to evolving grid conditions, leading to frequent misclassifications. The ANFIS model reduces FPR to 5.6% by incorporating adaptive learning, but it still struggles with real-time generalization. The Type-2 Fuzzy Logic Model achieves a moderate FPR of 4.9%, benefiting from uncertainty handling but still experiencing misclassification in complex fault conditions. The Hybrid Fuzzy-Genetic Algorithm Model improves FPR to 4.1% by optimizing fuzzy rule sets, but it remains higher than the proposed approach due to its dependence on pre-defined evolutionary parameters. In Fig. 13, lower FPR of the proposed model highlights its robustness in differentiating between actual faults and normal fluctuations in the power system.
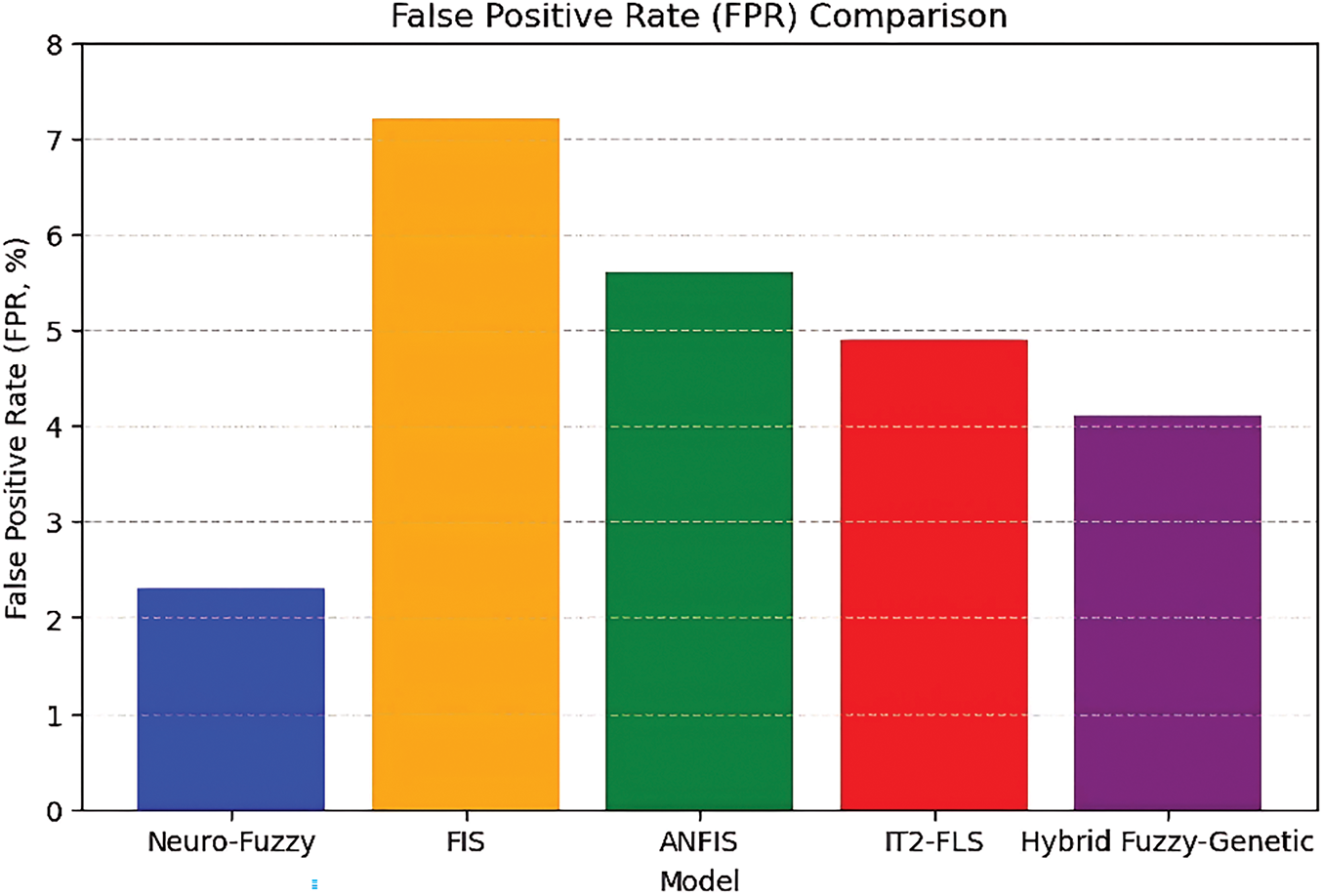
Figure 13: Graphical representation of false positive rate comparison
By integrating deep learning with fuzzy logic, the proposed approach enhances classification precision, minimizing unnecessary alerts while ensuring reliable fault detection in smart grids. The results confirm that the proposed model outperforms traditional fuzzy-based methods in terms of reducing false positives, making it a more efficient and stable fault detection solution.
4.2.7 False Negative Rate (FNR)
False Negative Rate (FNR) is an important performance metric in fault detection systems that represents the rate of real faults that are undetected. High FNR is not desirable because it allows faults to persist in the power system without triggering protective action, which results in extreme equipment malfunction and system instability. FNR must be minimized to ensure that the fault detection model detects all fault situations effectively without omitting dangerous anomalies. The proposed Neuro-Fuzzy Fault Detection Model is compared against four baseline fuzzy-based models, namely Conventional Fuzzy Logic (FIS), Adaptive Neuro-Fuzzy Inference System (ANFIS), Type-2 Fuzzy Logic System (IT2-FLS), and the Hybrid Fuzzy-Genetic Algorithm Model. The results of this comparison are presented in Table 7, demonstrating the effectiveness of the proposed approach in minimizing undetected faults.
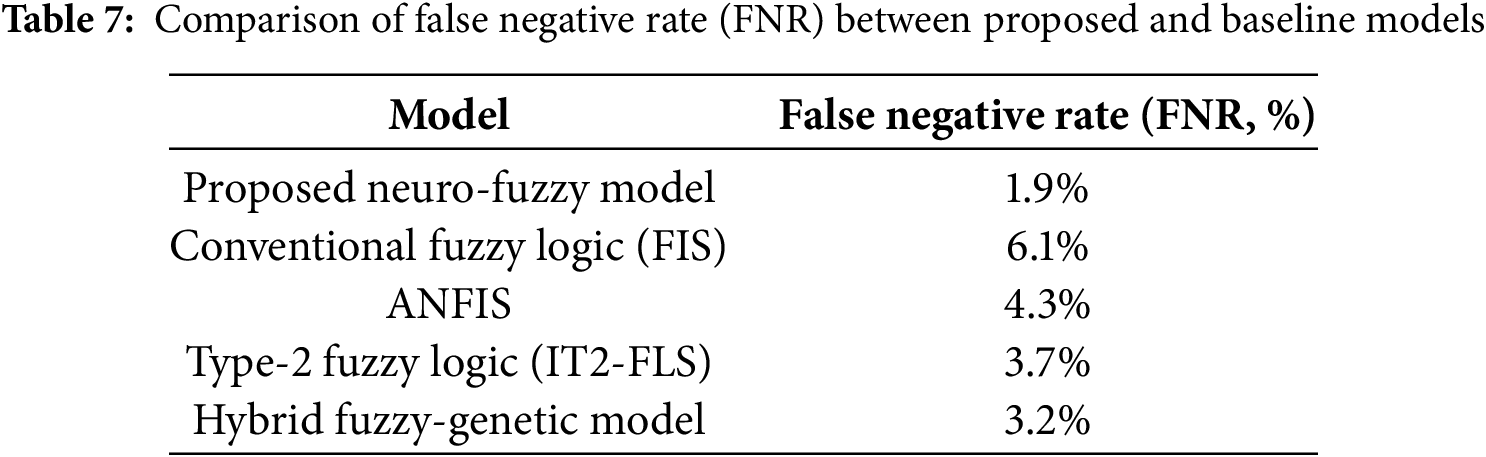
The results in Table 7 indicate that the proposed Neuro-Fuzzy Model achieves the lowest FNR of 1.9%, significantly outperforming all baseline models. The Conventional Fuzzy Logic Model (FIS) exhibits the highest FNR at 6.1%, which is due to its reliance on fixed rule sets that lack adaptability, causing frequent failures in detecting complex and evolving fault conditions. The ANFIS model reduces FNR to 4.3% by incorporating an adaptive learning mechanism, but it is still limited by its constrained ability to handle nonlinearity in fault patterns. The Type-2 Fuzzy Logic System (3.7%) improves upon ANFIS due to its enhanced uncertainty management, but it does not fully eliminate undetected faults. The Hybrid Fuzzy-Genetic Algorithm Model achieves an FNR of 3.2%, showing a reduction in missed faults through optimized rule selection, but it remains less effective than the proposed model due to its lack of real-time adaptive learning.
In Fig. 14, lower FNR of the proposed model underscores its reliability in ensuring comprehensive fault detection. By integrating deep learning with fuzzy logic, the proposed approach dynamically adjusts fuzzy rules, enhancing its ability to detect complex and transient faults in smart grid environments. The results confirm that the proposed model outperforms traditional fuzzy-based methods in minimizing false negatives, making it a more effective and secure fault detection solution.
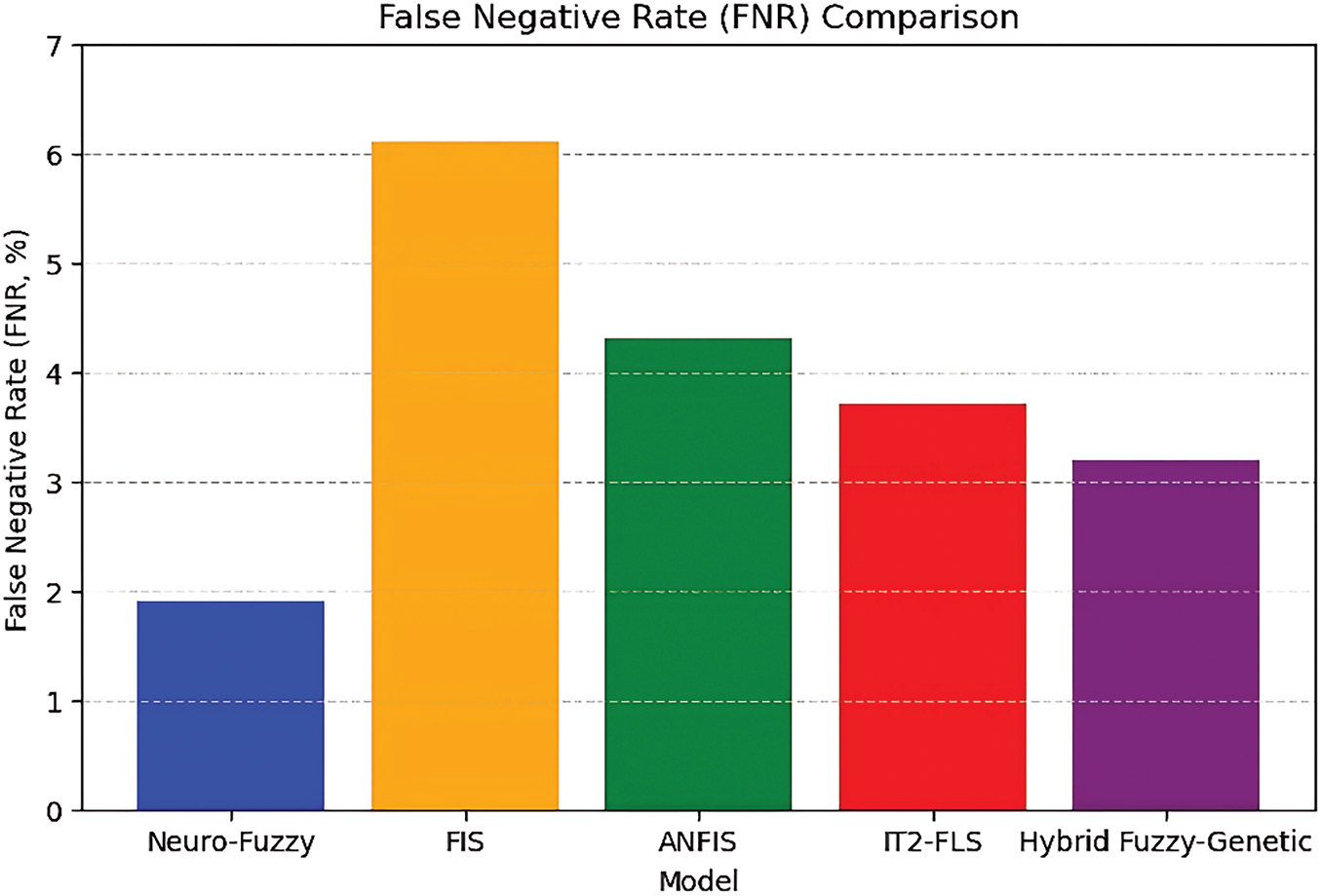
Figure 14: Graphical representation of false negative rate comparison
Our model testing under diverse conditions involved adding extra components to the IEEE system including PV panels along with wind turbines and battery storage and supercapacitors. The expanded system network made the grid both more complex and variable which enhanced the data collection for the proposed neuro-fuzzy model. The model achieved enhanced accuracy of 98.4% while precision increased to 98.5% and recall reached 99.1% because of its superior performance detecting and isolating faults in dynamic operational conditions. The proposed model achieved important error metric improvements with MAE at 2.1% and RMSE at 2.7% and MAPE at 2.8% and RMSPE at 2.6% and RMSRE at 2.5% and MSRE at 3.2%. These results demonstrate improved diagnostic reliability through reduced misclassifications. The enhanced adaptation and generalization across fault scenarios became possible because the neuro-fuzzy system received more diverse and denser operational signals. The updated system outperformed FIS and ANFIS and IT2-FLS baseline models across all performance parameters. A summary of the metric-wise system improvements appears in Fig. 15 following the update of the IEEE 33-bus system.
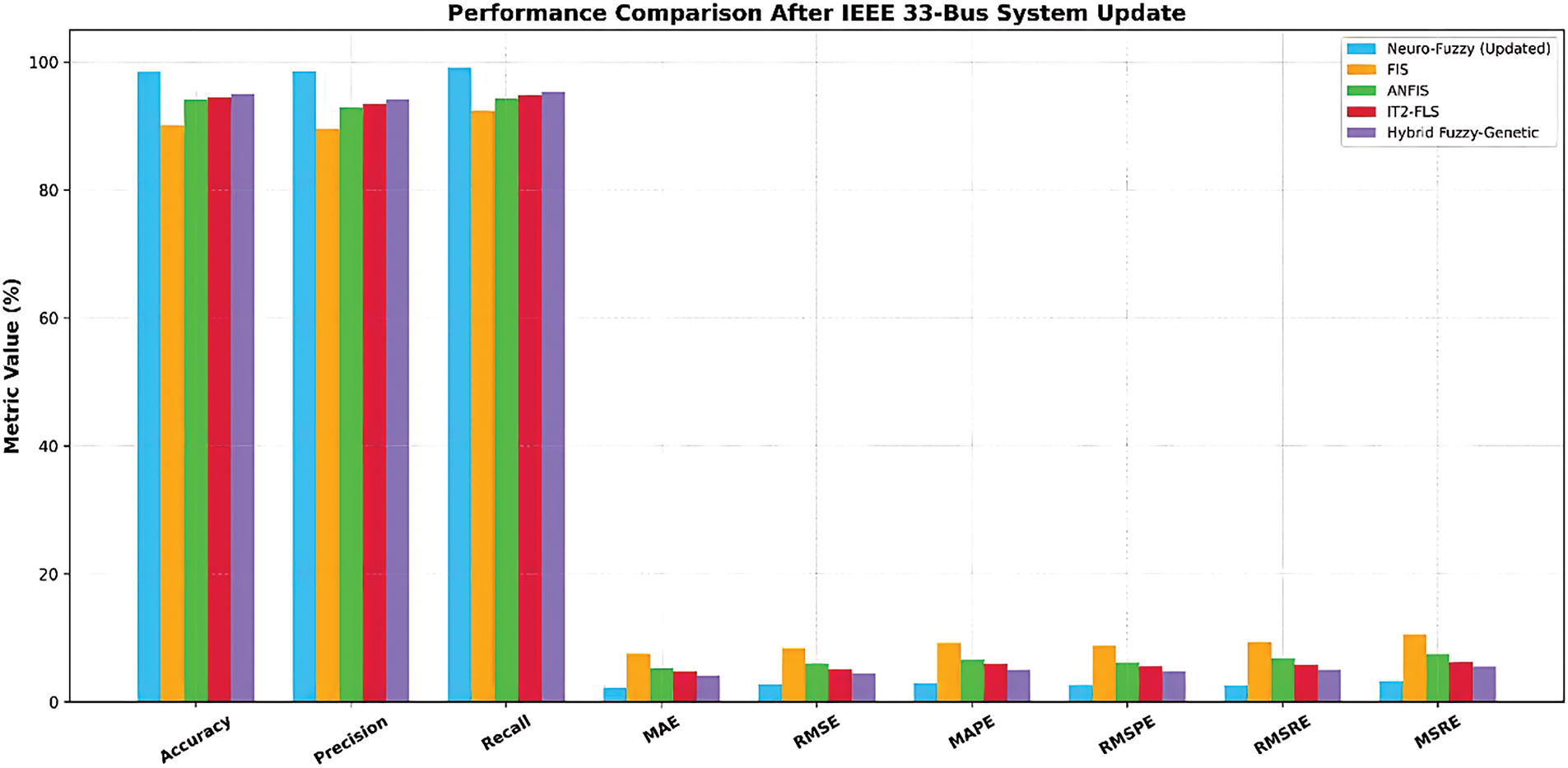
Figure 15: System performance after adding component in IEEE system
The integration of interpretive fuzzy logic with the flexibility of neural networks enables the proposed Neuro-Fuzzy Fault Detection Model to offer improved performance compared to conventional fault detection methods. Unlike conventional machine learning approaches, which rely on large-scale labeled training data sets, the neuro-fuzzy approach is very capable of handling nonlinear system behavior, power grid dynamics, and real-time fault states. By combining fuzzy logic-based inference with neural network learning, the model learns adaptively to optimize its fuzzy rules, leading to enhanced classification performance and decreased fault detection times. This capability is crucial in today’s smart grids, where fast fault isolation and adaptive response strategies are essential for maintaining grid reliability and stability.
The proposed system is 97.2% accurate to detect faults, which is better than traditional fuzzy logic-based approaches. Notably, it detects faults in 35 ms, allowing real-time response to evolving system disturbances. Finding a balance among high accuracy and low false alarm rates is one of the biggest challenges of fault detection since excessive false alarms can result in unwanted power shutdowns, and the faults that escape detection can result in severe equipment damage. The model suggested in this work overcomes this challenge well by having a low False Positive Rate (FPR) of 2.3% and a False Negative Rate (FNR) of 1.9%, guaranteeing accurate fault detection while reducing misclassification errors. These are the results of ongoing fuzzy rule adaptation, with the neural network part learning from real-time operational data, improving decision boundaries and minimizing fault classification uncertainty.
Conventional fuzzy inference systems (FIS) suffer from static rule bases that make them incapable of learning under dynamic fault situations. ANFIS and Type-2 Fuzzy Logic (IT2-FLS) models offer adaptive learning, but data dependency and higher computational complexity make them less than perfect for power grids at a large scale. The Hybrid Fuzzy-Genetic approach improves rule-based fault detection through. genetic optimization, but lacks real-time adaptive properties for digital grid applications. On the other hand, the proposed neuro-fuzzy model addresses these constraints using self-learning functions that enable the system to automatically adjust its decision-making process adaptively according to changing grid conditions. To further clarify the key difference between the proposed model and the baseline models, a comparative summary of model parameters is presented in the Table 8 below.
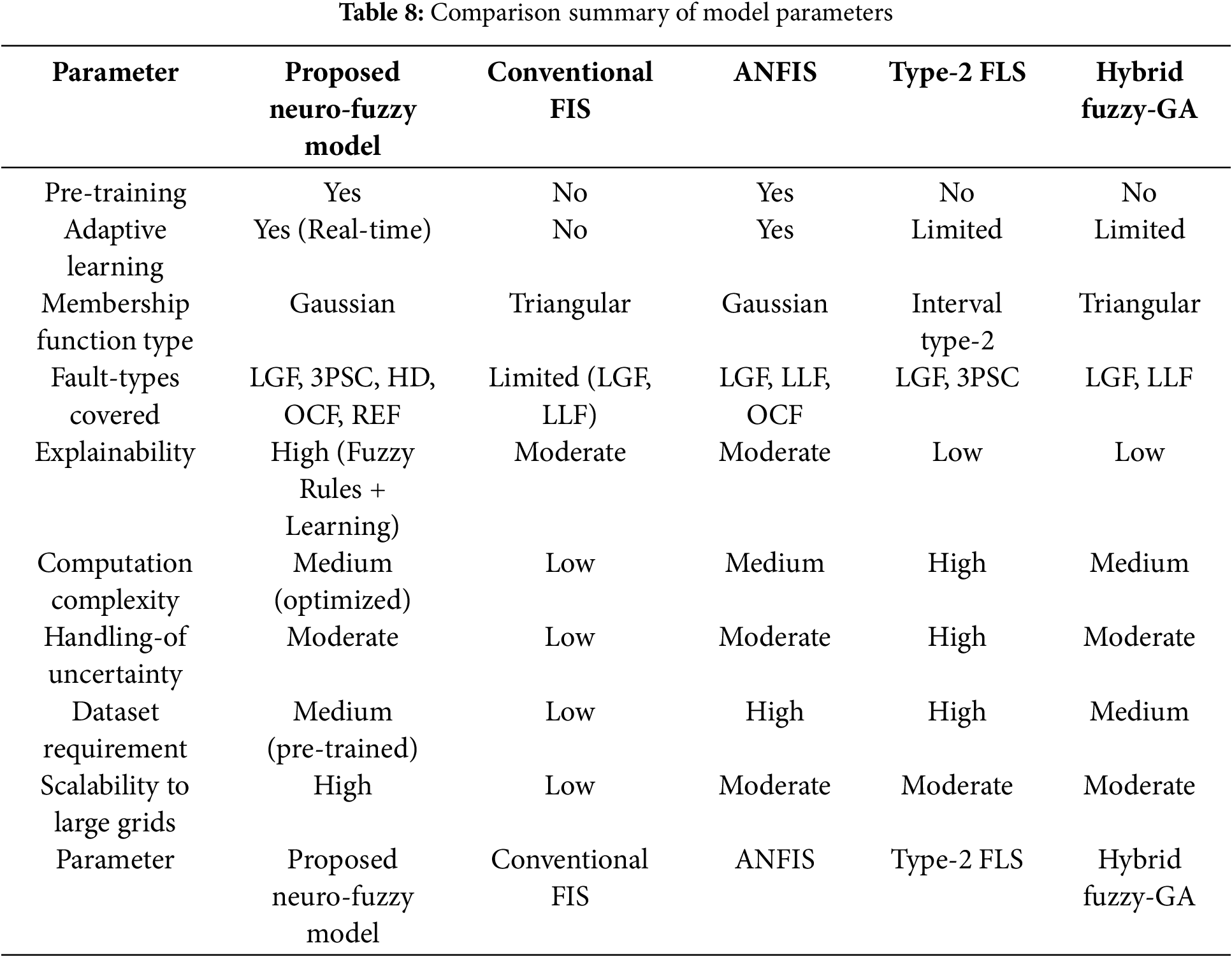
Another key advantage of the proposed model is its robustness against detection of a wide range of fault types, including Harmonic Distortion (HD), Open Circuit Faults (OCF), and Three-Phase Short Circuits (3PSC). The majority of traditional fault detection methods do not simplify across different fault conditions, which leads to high false alarms or undetected faults. The neuro-fuzzy approach efficiently addresses this issue by employing rule-based reasoning with adaptive learning such that even minor voltage, frequency, and power quality variations are accurately classified. The model is also well-suited for high penetration of renewable energy in smart grids, where fluctuating power generation can lead to other system instabilities.
From a practical perspective, the proposed neuro-fuzzy model presents significant benefits for real-time fault detection in digital grids. As power systems transition toward decentralized energy generation, adaptive fault detection frameworks become increasingly necessary to maintain system integrity. The proposed model can be integrated with IoT-based real-time monitoring systems, enabling continuous data input from voltage, current, and power quality sensors. This real-time data stream allows the model to detect faults instantly, reducing downtime and improving overall grid resilience. Furthermore, the ability to differentiate actual faults from transient disturbances ensures that unnecessary power outages are minimized, enhancing overall grid system stability, cost savings, and operational efficiency.
Despite these strengths, there are a few limitations to the neuro-fuzzy approach. One limitation is its computational demand in highly dynamic environments where the system continuously adapts to real-time data. While the model demonstrates significant accuracy in fault detection, particularly in fast-changing grid conditions, there could be potential computational bottlenecks when applied to large-scale grids with massive data streams from numerous sensors. Future research could focus on optimizing the computational efficiency of the model to handle high-frequency data without compromising performance. Furthermore, while the model performs well under diverse fault scenarios, further validation across a broader set of fault conditions and grid configurations is necessary to evaluate its robustness in highly complex systems, especially in power grids with more integrated renewable energy sources.
Additionally, it would be valuable to explore the algorithm’s performance across different types of faults in greater detail. While the neuro-fuzzy model has shown promise in detecting a range of faults such as Harmonic Distortion (HD), Open Circuit Faults (OCF), and Three-Phase Short Circuits (3PSC), more in-depth comparisons of fault detection accuracy, response time, and false alarm rates for various fault types would help assess the model’s strengths and weaknesses in different scenarios. It is crucial to understand how the algorithm performs under diverse conditions, such as varying fault severities, fault durations, and types of disturbances. This could provide a clearer picture of the model’s real-world applicability and guide further optimization efforts.
In terms of future research, one promising direction is the integration of the neuro-fuzzy model with advanced predictive analytics for proactive fault management. This could involve integrating historical data and real-time sensor inputs to not only detect faults but also predict potential failures before they occur. Another important avenue for future exploration is the incorporation of machine learning techniques, such as reinforcement learning, to further enhance the model’s decision-making capabilities. Reinforcement learning could allow the system to continuously learn and improve its fault detection accuracy based on feedback from the operational environment, providing even greater adaptability to evolving grid conditions. Future research should focus on further optimizing the model for large-scale deployment, particularly in multi-area smart grids with complex fault scenarios. One potential enhancement involves integrating the neuro-fuzzy model with block chain-based security frameworks, ensuring secure data transmission and tamper-proof fault records. As cybersecurity threats become more prevalent in power networks, a secure and intelligent fault detection system will be critical for protecting digital grid infrastructures from malicious attacks. Additionally, further work is needed to reduce the computational overhead of the model, making it more suitable for low-latency, real-time applications in large power networks.
The proposed neuro-fuzzy logic model performs well for small-sized grid networks, i.e., the IEEE 33-bus system, but scaling to larger and more complex grids is a significant problem. With increases in the buses, lines, and fault conditions, the computational complexity of the model increases as well, with the processing time and memory requirements being extended. For larger grids, the model would need to process a very high volume of real-time data, which could lead to delays in fault detection and isolation. To bypass these challenges, parallel processing, distributed computing, and multi-threading concepts can be employed to speed up the detection process and make the model capable of handling large-scale grids. Additionally, the greater complexity would necessitate the inclusion of more advanced fault models in order to capture a greater diversity of faults, which are appropriate to occur in larger systems. These additions would make the model more adaptable to grid configurations and to fault scenarios.
Although the proposed neuro-fuzzy model has demonstrated strong performance through simulation, further validation using real-world grid data is essential to confirm its practical applicability. Real-time grid environments often involve unpredictable conditions, data noise, communication delays, and cyber-physical interactions that cannot be fully captured in simulated test benches. To bridge this gap, future work will focus on collaborating with utility companies or smart grid pilot programs to deploy and test the model in live operational settings. By integrating the model with actual grid infrastructure and monitoring its response to real-time events, we can evaluate its effectiveness under realistic constraints.
The findings of this study highlight the superiority of the neuro-fuzzy approach in fault detection, offering higher accuracy, faster detection times, and lower misclassification rates compared to conventional techniques. By combining expert-driven fuzzy logic with adaptive neural network learning, the proposed model provides a scalable, intelligent, and efficient solution for smart grid fault management. The results reinforce that adaptive learning-based fault detection will play a crucial role in the next generation of power systems, ensuring greater grid stability, reliability, and resilience in the face of evolving challenges.
The proposed neuro-fuzzy fault detection model demonstrates a significant improvement in identifying and managing faults in modern power grids, particularly in digital and smart grid environments. Through the integration of fuzzy logic with neural networks, this model is capable of adapting to real-time conditions, making it more effective than traditional methods such as rule-based fuzzy logic systems (FIS) and other machine learning approaches like ANFIS or Type-2 Fuzzy Logic (IT2-FLS). The model’s ability to refine fuzzy rules based on data from the grid enables dynamic fault detection, ensuring that it can handle complex and evolving fault scenarios more efficiently.
The results of this study confirm that the proposed neuro-fuzzy model significantly outperforms conventional methods in key performance metrics, particularly in terms of detection time and false positive rate (FPR). These improvements are crucial for modern digitally connected smart grids, where timely and accurate fault detection directly influences system reliability and stability. A faster detection response helps prevent cascading failures and reduces the duration of outages, while a low FPR minimizes false alarms and unnecessary operational interventions, thereby preserving system integrity and operator trust. The practical implications of these results extend to operational efficiency and economic benefits for utility providers. By reducing downtime and improving the precision of fault identification, the proposed model can help lower maintenance costs, optimize resource allocation, and enhance the overall performance of grid management systems. Moreover, its adaptability makes it well-suited for future power systems with high levels of renewable integration and complex grid topologies. Therefore, this model has the potential to support the long-term goals of resilient, cost-effective, and intelligent power system operation. The proposed Neuro-Fuzzy Fault Detection Model integrates fuzzy logic with neural network-based adaptive learning, enabling real-time, high-accuracy fault classification in smart grids. Unlike traditional approaches such as FIS, ANFIS, IT2-FLS, and Hybrid Fuzzy-Genetic Models, which struggle with scalability, computational overhead, and adaptability, the proposed model dynamically updates fuzzy rules based on real-time data, achieving 97.2% accuracy, a 35-ms fault detection time, a False Positive Rate (FPR) of 2.3%, and a False Negative Rate (FNR) of 1.9%. By refining its inference rules continuously, the model ensures highly precise fault classification, even under evolving grid conditions. It effectively detects multiple fault types, including Harmonic Distortion (HD), Open Circuit Faults (OCF), and Three-Phase Short Circuits (3PSC), demonstrating robust handling of nonlinear system behavior and transient disturbances. As power grids transition toward decentralized, renewable-based architectures, intelligent fault detection mechanisms become essential for handling dynamic load variations and complex fault interactions. The proposed model offers scalability and adaptability, and its integration with IoT-based monitoring systems further enhances real-time fault detection accuracy by processing continuous sensor data. Future research should focus on optimizing computational efficiency, integrating block chain-based security for tamper-proof fault detection, and extending deployment to large-scale smart grids. The findings confirm that the proposed model surpasses conventional fault detection methods, establishing itself as a highly reliable and intelligent solution for modern power grid fault monitoring. The use of simulated data and a controlled IEEE 33-bus system is what keeps the study from being broader. Putting these techniques into action across large and mixed grids may bring new issues, for example, the delays involved in communication and the instability between cyber and physical parts. In the future, the framework will be built for hybrid AC-DC networks and cybersecurity concerns will be included.
Acknowledgement: Not applicable.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: Study conception and design: Zuhaib Nishtar, Fangzong Wang; Data collection: Zuhaib Nishtar; Analysis and interpretation of results: Zuhaib Nishtar, Fangzong Wang, Fawwad Hassan Jaskani; Draft manuscript preparation: Fawwad Hassan Jaskani, Hussain Afzaal. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data will be available from corresponding author after publication on demand.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
Nomenclature
| Parameters | Abbreviation |
| Vd | Voltage deviation |
| Is | Current spike |
| PQ | Power quality |
| THD | Total harmonic distortion |
| PF | Power factor |
| Q | Reactive power |
| FPR | False positive rate |
| MSE | Mean squared error |
| ANFIS | Adaptive Neuro-Fuzzy Inference System |
| FIS | Fuzzy Inference System |
| LLF | Line-to-line fault |
| LGF | Line-to-ground fault |
| 3PSC | Three-phase short circuit |
| OCF | Open circuit fault |
| TF | Transformer fault |
| REF | Renewable energy system fault |
| Voltage (V) | Monitored for deviations indicating faults |
| Current (I) | Monitored for spikes due to short circuits or load imbalances |
| Frequency (f) | Monitored for deviations due to disturbances |
| Power Factor (PF) | Indicates grid stability and system health |
| Harmonics | Distortions in the waveform, measured by THD |
| Accuracy (%) | The proportion of correctly identified faults |
| Response Time | Time taken to detect faults |
| False Alarm Rate (FAR) | Percentage of normal conditions misclassified as faults |
| wi | Firing strength of a rule in the fuzzy inference system |
| μVd | Membership function value for voltage deviation |
| Membership function value for current spike | |
| μTHF | Membership function value for total harmonic distortion |
References
1. Shao N, Chen Q, Dong Y, Ding W, Wang L. Power system fault diagnosis method based on intuitionistic fuzzy sets and incidence matrices. IEEE Trans Power Deliv. 2023;38(6):3924–38. doi:10.1109/TPWRD.2023.3294883. [Google Scholar] [CrossRef]
2. Shen Q, Shi P, Lim CP. Fuzzy adaptive fault-tolerant stability control against novel actuator faults and its application to mechanical systems. IEEE Trans Fuzzy Syst. 2024;32(4):2331–40. doi:10.1109/TFUZZ.2023.3343403. [Google Scholar] [CrossRef]
3. Cui D, Chadli M, Xiang Z. Fuzzy fault-tolerant predefined-time control for switched systems: a singularity-free method. IEEE Trans Fuzzy Syst. 2024;32(3):1223–32. doi:10.1109/TFUZZ.2023.3321688. [Google Scholar] [CrossRef]
4. Hu Y, Yan H, Zhang Y, Zhang H, Chang Y. Event-triggered prescribed performance fuzzy fault-tolerant control for unknown Euler-Lagrange systems with any bounded initial values. IEEE Trans Fuzzy Syst. 2023;31(6):2065–75. doi:10.1109/TFUZZ.2022.3218847. [Google Scholar] [CrossRef]
5. Ma J, Zhang H, Zhang J, Liu Z. Event-based fixed-time fuzzy containment fault-tolerant control for multiagent systems with positive odd rational powers. IEEE Trans Fuzzy Syst. 2024;32(6):3805–14. doi:10.1109/TFUZZ.2024.3382646. [Google Scholar] [CrossRef]
6. Xiong Y, Wu Y, Xiang Z. Fuzzy adaptive output feedback fault-tolerant control for nonlinear switched large-scale systems with sensor faults. IEEE Syst J. 2022;16(3):3782–93. doi:10.1109/JSYST.2021.3113907. [Google Scholar] [CrossRef]
7. Gulzar MM, Gardezi S, Sibtain D, Khalid M. Discrete-time modeling and control for LFC based on fuzzy tuned fractional-order PDμ controller in a sustainable hybrid power system. IEEE Access. 2023;11(4):63271–87. doi:10.1109/ACCESS.2023.3288991. [Google Scholar] [CrossRef]
8. Mansouri MM, Hadjeri S, Brahami M. New method of detection, identification, and elimination of photovoltaic system faults in real time based on the adaptive neuro-fuzzy system. IEEE J Photovolt. 2021;11(3):797–805. doi:10.1109/JPHOTOV.2021.3051145. [Google Scholar] [CrossRef]
9. Wang M, Feng G, Yan H, Qiu J, Zhang H. Membership-function-dependent fault detection filtering design for interval type-2 T-S fuzzy systems in finite frequency domain. IEEE Trans Fuzzy Syst. 2021;29(9):2760–73. doi:10.1109/TFUZZ.2020.3006987. [Google Scholar] [CrossRef]
10. Ali Z, Terriche Y, Hoang LQN, Abbas SZ, Hassan MA, Sadiq M, et al. Fault management in DC microgrids: a review of challenges, countermeasures, and future research trends. IEEE Access. 2021;9:128032–54. doi:10.1109/access.2021.3112383. [Google Scholar] [CrossRef]
11. Sadi MAH, AbuHussein A, Shoeb MA. Transient performance improvement of power systems using fuzzy logic controlled capacitive-bridge type fault current limiter. IEEE Trans Power Syst. 2021;36(1):323–35. doi:10.1109/TPWRS.2020.3003294. [Google Scholar] [CrossRef]
12. Arsad AZ, Hannan MA, Hossain Lipu MS, Abd Rahman MS, Ker PJ, Mansor M, et al. Rule-based fuzzy controller for solid state transfer switch towards fast sensitive loads transfer. IEEE Trans Ind Applicat. 2022;58(2):1888–98. doi:10.1109/tia.2022.3146100. [Google Scholar] [CrossRef]
13. Islam MR, Hasan J, Shipon MRR, Sadi MAH, Abuhussein A, Roy TK. Neuro fuzzy logic controlled parallel resonance type fault current limiter to improve the fault ride through capability of DFIG based wind farm. IEEE Access. 2020;8:115314–34. doi:10.1109/ACCESS.2020.3000462. [Google Scholar] [CrossRef]
14. Shahbazi H, Karbalaei F. Decentralized voltage control of power systems using multi-agent systems. J Mod Power Syst Clean Energy. 2020;8(2):249–59. doi:10.35833/mpce.2018.000628. [Google Scholar] [CrossRef]
15. Jia K, Zhu R, Bi T, Zhao Q, Wang C, Xuan Z. Fuzzy-logic-based active protection for photovoltaic DC power plant. IEEE Trans Power Deliv. 2020;35(2):497–507. doi:10.1109/TPWRD.2019.2907115. [Google Scholar] [CrossRef]
16. Zare I, Asemani MH, Setoodeh P. Active adaptive observer-based fault-tolerant control strategy for a class of T-S fuzzy systems with unmeasurable premise variables. IEEE Trans Fuzzy Syst. 2023;31(10):3543–54. doi:10.1109/TFUZZ.2023.3261552. [Google Scholar] [CrossRef]
17. Sebastian G, Hannan MA, Al-Shetwi AQ, Ker PJ, Rahman MSA, Mansur M, et al. A novel PSO based fuzzy controller for robust operation of solid-state transfer switch and fast load transfer in power systems. IEEE Access. 2022;10:37369–81. doi:10.1109/ACCESS.2022.3165021. [Google Scholar] [CrossRef]
18. Wang F, Nishtar Z. Real-time load forecasting and adaptive control in smart grids using a hybrid neuro-fuzzy approach. Energies. 2024;17(11):2539. doi:10.3390/en17112539. [Google Scholar] [CrossRef]
19. Ali MH, Nguyen TA, Kim TY. A neuro-fuzzy fault classification technique for power distribution systems using PMU data. IEEE Trans Smart Grid. 2021;12(2):1342–53. doi:10.1109/TSG.2021.3052262. [Google Scholar] [CrossRef]
20. Wang X, Zhang Y, Liu Q. Real-time fault detection in renewable-integrated smart grids using ANFIS. IEEE Access. 2021;9:146120–35. doi:10.1109/ACCESS.2021.3116378. [Google Scholar] [CrossRef]
21. Mohamed RG, Ebrahim MA, Abdel Aleem SHE. Enhancing fault-clearing algorithm for renewable-energy-based systems using ANNs. Clean Energy. 2024;8(5):97–116. doi:10.1093/ce/zkae056. [Google Scholar] [CrossRef]
22. Gandhi V, Joo YH. T-S fuzzy sampled-data control for nonlinear systems with actuator faults and its application to wind energy system. IEEE Trans Fuzzy Syst. 2022;30(2):462–74. doi:10.1109/TFUZZ.2020.3041113. [Google Scholar] [CrossRef]
23. Mashifane LD, Mendu B, Monchusi BB. State-of-the-art fault detection and diagnosis in power transformers: a review of machine learning and hybrid methods. IEEE Access. 2025;13(3):48156–72. doi:10.1109/access.2025.3546861. [Google Scholar] [CrossRef]
24. Yang T, Kang H, Ma H, Wang X. Adaptive fuzzy finite-time fault-tolerant consensus tracking control for high-order multiagent systems with directed graphs. IEEE Trans Cybern. 2023;53(1):607–16. doi:10.1109/TCYB.2022.3165351. [Google Scholar] [PubMed] [CrossRef]
25. Zahraoui Y, Korõtko T, Rosin A, Mekhilef S, Seyedmahmoudian M, Stojcevski A, et al. AI applications to enhance resilience in power systems and microgrids: a review. Sustainability. 2024;16(12):4959. doi:10.3390/su16124959. [Google Scholar] [CrossRef]
26. Adewuyi OB, Krishnamurthy S. Performance analysis for predictive voltage stability monitoring using enhanced adaptive neuro-fuzzy expert system. Mathematics. 2024;12(19):3008. doi:10.3390/math12193008. [Google Scholar] [CrossRef]
27. Poursaeed AH, Namdari F. Online transient stability assessment implementing the weighted least-square support vector machine with the consideration of protection relays. Prot Control Mod Power Syst. 2025;10(1):1–17. doi:10.23919/pcmp.2023.000032. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools