
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Enhancing ITS Reliability and Efficiency through Optimal VANET Clustering Using Grasshopper Optimization Algorithm
1 Department of Convergence Science, Kongju National University, Gongju, 32588, Republic of Korea
2 Department of Artificial Intelligence Engineering, Mokpo National University, Chonnam, 58554, Republic of Korea
3 Laboratory of Autonomous Vehicle and Block-chain, Korean National Police University, Hungnamm, 31539, Republic of Korea
* Corresponding Authors: Yeonwoo Lee. Email: ; Cheolhee Yoon. Email:
(This article belongs to the Special Issue: Computer Modeling for Future Communications and Networks)
Computer Modeling in Engineering & Sciences 2025, 143(3), 3769-3793. https://doi.org/10.32604/cmes.2025.066298
Received 04 April 2025; Accepted 16 June 2025; Issue published 30 June 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
As vehicular networks grow increasingly complex due to high node mobility and dynamic traffic conditions, efficient clustering mechanisms are vital to ensure stable and scalable communication. Recent studies have emphasized the need for adaptive clustering strategies to improve performance in Intelligent Transportation Systems (ITS). This paper presents the Grasshopper Optimization Algorithm for Vehicular Network Clustering (GOA-VNET) algorithm, an innovative approach to optimal vehicular clustering in Vehicular Ad-Hoc Networks (VANETs), leveraging the Grasshopper Optimization Algorithm (GOA) to address the critical challenges of traffic congestion and communication inefficiencies in Intelligent Transportation Systems (ITS). The proposed GOA-VNET employs an iterative and interactive optimization mechanism to dynamically adjust node positions and cluster configurations, ensuring robust adaptability to varying vehicular densities and transmission ranges. Key features of GOA-VNET include the utilization of attraction zone, repulsion zone, and comfort zone parameters, which collectively enhance clustering efficiency and minimize congestion within Regions of Interest (ROI). By managing cluster configurations and node densities effectively, GOA-VNET ensures balanced load distribution and seamless data transmission, even in scenarios with high vehicular densities and varying transmission ranges. Comparative evaluations against the Whale Optimization Algorithm (WOA) and Grey Wolf Optimization (GWO) demonstrate that GOA-VNET consistently outperforms these methods by achieving superior clustering efficiency, reducing the number of clusters by up to 10% in high-density scenarios, and improving data transmission reliability. Simulation results reveal that under a 100–600 m transmission range, GOA-VNET achieves an average reduction of 8%–15% in the number of clusters and maintains a 5%–10% improvement in packet delivery ratio (PDR) compared to baseline algorithms. Additionally, the algorithm incorporates a heat transfer-inspired load-balancing mechanism, ensuring equitable distribution of nodes among cluster leaders (CLs) and maintaining a stable network environment. These results validate GOA-VNET as a reliable and scalable solution for VANETs, with significant potential to support next-generation ITS. Future research could further enhance the algorithm by integrating multi-objective optimization techniques and exploring broader applications in complex traffic scenarios.Keywords
Metaheuristic algorithms have become essential tools for exploring the solution space in the design of systems with optimal functionality. Among them, nature-inspired algorithms offer powerful computational methods by mimicking natural phenomena, surpassing the limitations of traditional search strategies in addressing complex optimization problems. The Grasshopper Optimization Algorithm (GOA), in particular, stands out for its strong global search capabilities, ease of integration with other techniques, simplicity of implementation, and low computational overhead. It has been successfully applied to global optimization, benchmark testing, and feature selection tasks. This study applies GOA to optimize clustering in Vehicular Ad Hoc Networks (VANETs), aiming to enhance network reliability and evaluate its performance in this domain.
VANETs are a fundamental component of Intelligent Transportation Systems (ITS), enabling vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication for improved road safety, traffic control, and infotainment services. However, due to dynamic topology, intermittent connectivity, and varying node densities, ensuring scalability and stability remains a major challenge [1]. Efficient clustering and routing mechanisms are required to address these issues. Clustering-based routing techniques have gained attention in VANETs for improving scalability, reducing overhead, and increasing data delivery reliability. Vehicles are grouped into clusters managed by a Cluster Head (CH), and the effectiveness of clustering algorithms directly affects performance metrics such as network lifetime, packet delivery ratio (PDR), latency, and throughput. Bio-inspired metaheuristic algorithms have shown great promise in addressing VANET challenges, with GOA and the Whale Optimization Algorithm (WOA) being among the most effective. GOA excels at global exploration, while WOA offers fast convergence and robust local optimization. A hybrid approach combining both can balance exploration and exploitation to yield better results in dynamic environments.
The proposed hybrid GOA-WOA algorithm dynamically balances global and local search strategies to optimize cluster formation, reduce communication overhead, and extend network lifespan. Unlike conventional methods relying solely on local or global optimization, the hybrid model adapts to the changing VANET environment more effectively. To comprehensively evaluate its performance, the hybrid GOA-WOA is integrated with well-known routing protocols like Ad hoc On-Demand Distance Vector (AODV) and GPSR. Performance metrics such as packet delivery ratio and latency are compared against other bio-inspired approaches, including PSO and GWO. Load balancing is another critical factor in VANETs, especially as vehicle density changes dynamically over time. Node density and cluster grid size influence network performance, while Regions of Interest (ROIs) in the road environment help vehicles move flexibly and stably toward their destinations [2]. By integrating AI and optimization algorithms, VANET systems can achieve higher levels of automation and intelligence. The potential of these algorithms has attracted growing interest from researchers developing ITS and vehicular communication solutions. This paper provides a comprehensive literature review, details the methodology and implementation of the proposed system, evaluates its effectiveness, and suggests directions for future research.
The advancement of modern Intelligent Transportation Systems (ITS) has been largely driven by the capabilities and applications of Vehicular Ad-hoc Networks (VANETs). Despite this progress, the integration of VANET technologies presents several challenges. Research in this field has extensively explored key aspects such as routing efficiency, vehicular safety, and spatial organization within the network. Bio-inspired techniques have emerged as promising approaches to enhance the performance of existing ITS frameworks. These methods leverage natural optimization principles to improve network performance and adaptability.
Bio-inspired clustering optimization has been introduced to address various challenges in VANETs. Evolutionary Algorithms (EAs), characterized by self-organizing and adaptive capabilities, manage the dynamic topologies of VANETs efficiently. Bio-Inspired Algorithms (BIAs) play a pivotal role in VANET optimization, especially in routing and decision-making processes. These algorithms are mainly categorized into two types: Evolutionary Algorithms (EAs) and Swarm Intelligence Algorithms (SIAs). Both are employed to solve complex VANET optimization problems where traditional methods may require excessive computational resources.
The Grasshopper Optimization Algorithm (GOA), a metaheuristic inspired by the natural swarming behavior of grasshoppers, has demonstrated outstanding performance across various optimization problems. GOA’s features—robust global search mechanisms, ease of integration with other algorithms, and low computational complexity—make it a promising tool for enhancing VANETs. When applied to VANETs, GOA has shown potential in optimizing vehicle clustering, route planning, energy efficiency, and security, thereby improving the reliability of ITS.
GOA has consistently outperformed other optimization techniques in comparative evaluations. For example, GOA has been used in designing linear-phase constrained impulse response filters for low-pass, high-pass, band-pass, and band-stop filters, achieving high precision and applicability to communication filtering in VANETs. Additionally, in industrial fuel consumption optimization with nonlinear constraints, GOA-based optimal constraint application maximized fuel efficiency—an outcome relevant to VANETs, where battery life extension and reduced energy consumption are critical [3–5].
In environmental monitoring, the integration of GOA with Hybrid Thresholded Discharge (HTD) improved the accuracy of wastewater pollution prediction, indicating its applicability to real-time traffic data forecasting in dynamic VANET environments [6,7]. GOA has also been used to predict vibration intensities from mining blasts, minimizing structural damage. A similar approach can be applied to VANETs to maintain safe inter-vehicle distances and reduce collision risks [8]. GOA-based anomaly detection systems significantly enhanced cybersecurity, particularly in network intrusion detection, offering robust data protection for VANETs [9]. These systems provide scalable frameworks for real-time cyber threat detection and prevention in vehicular networks [10].
Furthermore, GOA has been successfully applied to optimize Automatic Generation Control (AGC) in power systems, enhancing system flexibility and stability. This functionality is transferable to VANETs for efficient energy management and load balancing [11]. GOA has also evolved through integration with other optimization strategies. For instance, combining GOA with a spiral search technique improved feature selection accuracy, beneficial for real-time data analysis and filtering in VANET communications. Hybrid algorithms integrating GOA with local search and bee algorithms demonstrated superior clustering performance compared to existing methods [12,13], which is valuable for optimizing node placement and reducing energy consumption in VANETs. Integrating GOA with a hybrid bee algorithm led to optimal node placement in Wireless Sensor Networks (WSNs), applicable to VANETs for improved resource management [14].
GOA has also been employed for optimal pathfinding in visible light wireless ad-hoc networks, facilitating route optimization and traffic flow management in VANETs by enabling vehicles to avoid congestion [15]. Chaos mapping strategies have enhanced GOA’s global search and local diversification, leading to more precise resource management and route optimization in VANETs. GOA-fuzzy Proportional-Derivative–Proportional-Integral Controller (PD-PI) variations applied to renewable energy optimization further improved performance, contributing to reduced vehicle battery usage and optimized energy utilization in VANETs [16]. GOA has also been used for river path optimization to improve logistics management, ensuring vehicles maintain safe and consistent speeds in VANETs [17].
The integration of GOA with Novel Mutation Algorithms (NMA) optimized robotic gripper mechanisms, which can be adapted for maintaining safe inter-vehicle distances and traffic control in VANETs [18]. Merging GOA with Immune Water Optimization (IWO) enhanced random search strategies, showcasing its effectiveness in clustering and path optimization for VANETs [19]. In cybersecurity, a GOA-based C-GOA model increased detection rates for cyberattacks, offering a reliable optimization algorithm for securing VANET data [20]. Multi-level GOA (MGOA) achieved high accuracy in early autism spectrum disorder (ASD) diagnosis, which could also be leveraged in VANETs for fast data analysis and critical information identification [21].
When combined with other optimization strategies, GOA has shown notable advancements in solving complex clustering, resource management, and feature selection problems. Recent research explores hybrid approaches to tailor GOA and similar metaheuristics for dynamic environments like VANETs and ITS. For example, a hybrid algorithm combining the Dragonfly Algorithm with a spiral search pattern improved global search and convergence speeds [22,23]. Another study integrated parallel spiral search with adaptive thresholding to enhance clustering optimization and node placement efficiency in VANETs.
GOA also improved performance in data clustering problems, enabling real-time clustering and communication optimization among VANET nodes [24]. GOA has been used to build remote problem-solving and diagnostic support systems for VANETs, ensuring that vehicles can diagnose and address issues in real-time while in motion [25].
Swarm Intelligence Algorithms (SIAs) extend the principles of evolutionary computation by modeling social behaviors observed in nature, such as ant foraging, bird flocking, and bee colony activity. These algorithms operate based on five core principles: Proximity, which ensures simple spatial and temporal computations; Quality, which enhances responsiveness to environmental changes; Direct Response, which provides clear and decisive solutions; Stability, which maintains adaptability in dynamic environments; and Adaptability, which ensures computational efficiency. Among the most successfully applied SIAs in VANET routing are Ant Colony Optimization (ACO), Bee Colony Optimization (BCO), Particle Swarm Optimization (PSO), and Spider Web Algorithm (SWA). These algorithms are effective in reducing routing overhead, optimizing packet delivery, and improving overall network efficiency.
Optimization plays a critical role in VANETs, as routing and resource allocation require efficient and adaptive decision-making. Both Evolutionary Algorithms (EAs) and SIAs contribute to multi-objective decision-making processes by iteratively refining solutions. The use of bio-inspired approaches enhances communication reliability, mitigates network congestion, and improves overall routing efficiency in VANETs. As research continues to advance, the integration of hybrid bio-inspired techniques is emerging as a promising direction for further enhancing VANET optimization strategies.
Recent studies have actively explored bio-inspired algorithms and metaheuristic optimization techniques to address a wide range of challenges in VANETs. These approaches have shown promising results in routing optimization, network performance improvement, and overall system efficiency. A comprehensive survey [26] emphasizes the recent developments in bio-inspired routing optimization algorithms for VANETs, highlighting their effectiveness in addressing congestion and overhead issues while providing optimized solutions for high-speed vehicular data dissemination. Recent research on clustering and resource optimization in VANET environments has explored a variety of approaches, with particular attention given to the use of Deep Reinforcement Learning (DRL). However, the following relevant studies have not been cited in this paper. First, a federated self-supervised DRL framework was proposed to address task offloading and resource allocation in Integrated Sensing and Communication (ISAC)-enabled vehicular edge computing environments [27]. Second, a DRL-based optimization technique was introduced to simultaneously minimize Age of Information (AoI) and energy consumption in C-V2X-enabled Internet of Vehicles (IoV) scenarios [28]. These studies offer valuable insights into improving clustering stability, real-time responsiveness, and energy efficiency in VANETs. Moreover, they highlight the potential for hybrid integration with swarm intelligence-based frameworks such as GOA-VNET. Consequently, extending this research by incorporating DRL-based multi-objective optimization structures could be a promising future direction.
For instance, algorithms such as ACO, PSO, and ABC (Artificial Bee Colony) have been applied to optimize route selection in VANETs, leading to improved key performance indicators such as packet delivery ratio (PDR), throughput, and end-to-end delay. In addition, research on hybrid solutions that combine multiple bio-inspired algorithms has also been active. One notable example is a seamless vertical handover algorithm based on the integration of ABC and PSO [29], which significantly reduces handover decision delays and unnecessary handovers across diverse traffic scenarios. Furthermore, bio-inspired algorithms have been applied to various aspects of VANET optimization, including vehicle routing, resulting in improvements in QoS metrics such as energy consumption, jitter, throughput, latency, routing load, and packet delivery ratio.
The studies highlight that nature-inspired algorithms are highly effective in addressing complex VANET routing problems and contribute to overcoming the limitations of traditional routing protocols, particularly in terms of packet delivery ratio (PDR), robustness, and overhead. These findings validate GOA as a highly flexible tool for solving complex optimization challenges. Its demonstrated effectiveness in areas such as clustering, pathfinding, energy management, and data security underscores its potential to significantly enhance VANET performance and ITS infrastructure, positioning GOA as a promising technology for maximizing reliability and efficiency.
This study proposes an optimal clustering technique for VANET based on the GOA to enhance the reliability of the ITS and improve the efficiency of VANET. The primary goal is to mitigate traffic congestion caused by high node density within the Region of Interest (ROI), enable efficient data communication, and establish a reliable VANET environment. In the context of VANET, node density is considered a critical heating parameter when applying GOA. This approach treats node concentration within a specific ROI in the road environment as analogous to temperature, predicting and optimizing regions of high node density. From a GOA perspective, increased node density in a specific area corresponds to a rise in temperature. This temperature concept is used to measure the degree of traffic congestion and provides necessary data for clustering and route optimization. When node density increases in specific sections of RE, traffic congestion is likely to occur. In such cases, GOA-based routing algorithms are required to create a more flexible and reliable RE environment, enabling vehicles to travel smoothly to their destinations.
The proposed GOA-VNET clustering method efficiently clusters VANET nodes based on specific ROIs within RE, providing an optimal data transmission environment.
The GOA-VNET algorithm efficiently manages communication and data exchange between clusters, contributing to the development of a reliable VANET. GOA-VNET clusters nodes based on ROI, designed to prevent disruption of traffic flow and improve communication and data transmission efficiency among nodes. Within each cluster, a Cluster Leader (CL) is selected to oversee communication among nodes within the cluster and relay data with other CLs. This facilitates seamless data transmission between clusters and significantly reduces communication overhead. One of the key features of GOA-VNET is load balancing, which prevents overloading in specific clusters and enhances the overall network’s stability. GOA-VNET aims to maintain an acceptable node density within the ROI of each cluster and redistributes nodes when density is too high or low to achieve load balance. This ensures a reliable VANET environment and supports RE users in traveling to their destinations without encountering traffic congestion. Additionally, GOA-VNET minimizes communication overhead by allowing only CLs to connect to VANET service base stations for data transmission. This architecture significantly reduces unnecessary node-to-node communication, optimizing the overall data flow within the network. The GOA-VNET algorithm generates optimal clustering solutions through iterative and interactive processes, maximizing data transmission efficiency by considering inter-node distances.
GOA-VNET generates interactive and iterative goal function-based solutions to deliver optimal clustering results. During this process, node positions and cluster configurations are continuously adjusted. The GOA-VNET algorithm employs a repetitive and interactive approach to optimize data based on the goal function, contributing to the establishment of an efficient data transmission environment by considering inter-node distances.
3.1 The Necessity of GOA-VNET in VANET Environments
VANET communication plays a crucial role in ITS operations, requiring metaheuristic-based optimization to ensure efficient data transmission even under uncertain network conditions. VANET demands rapid communication to address various situations arising from the uncertainties within the RE. To tackle these challenges, optimization algorithms like GOA are essential, enabling real-time support for vehicle users from various service providers. In the VANET environment, identifying and repairing failures in Roadside Units (RSUs) and in-vehicle Electronic Control Units (ECUs) are critical factors. These processes allow vehicles to avoid traffic congestion in the road environment and move efficiently. This study proposes leveraging remote service base stations to resolve vehicle issues in real-time and enable bypassing congested areas.
In addition to GOA, algorithms such as Ant Colony Optimization (ACO) can be employed to optimize data transmission and route discovery in VANETs. ACO is particularly useful for finding optimal routes within the road environment, optimizing VANET data transmission paths and ensuring the efficient operation of the entire network. By combining GOA and ACO, VANET communication can be optimized, enhancing the reliability of ITS. This provides vehicles with a road environment where they can exchange data reliably and travel smoothly to their destinations. Clustering and load balancing based on GOA-VNET enhance the reliability of ITS and create a network environment where vehicles can move safely and efficiently to their destinations. Through this approach, VANET can implement reliable clustering even in diverse road environments and traffic conditions, playing a pivotal role in ITS operations.
3.2 Grasshopper Optimization Algorithm (GOA)
A general overview of the GOA is provided to better understand the optimization algorithm used for the VANET node clustering tasks in this study.
GOA belongs to the category of swarm intelligence optimization algorithms [26]. It incorporates interactions between general agents and elite agents within the same environment. For example, general agents represent VNs (Vehicular Nodes), while elite agents correspond to Cluster Leaders (CLs). GOA is inspired by the behavior of grasshoppers moving to consume crops.
Nature-inspired algorithms, such as the Grasshopper Optimization Algorithm (GOA), are logically divided into two main components: exploration and exploitation. In the exploration phase, search agents are encouraged to move abruptly, while in the exploitation phase, they tend to move locally. These two behaviors, along with target-seeking, are naturally performed by grasshoppers. By finding a way to mathematically model these two behaviors, it becomes possible to design a new nature-inspired algorithm to implement GOA.
where,
where,
In these equations,
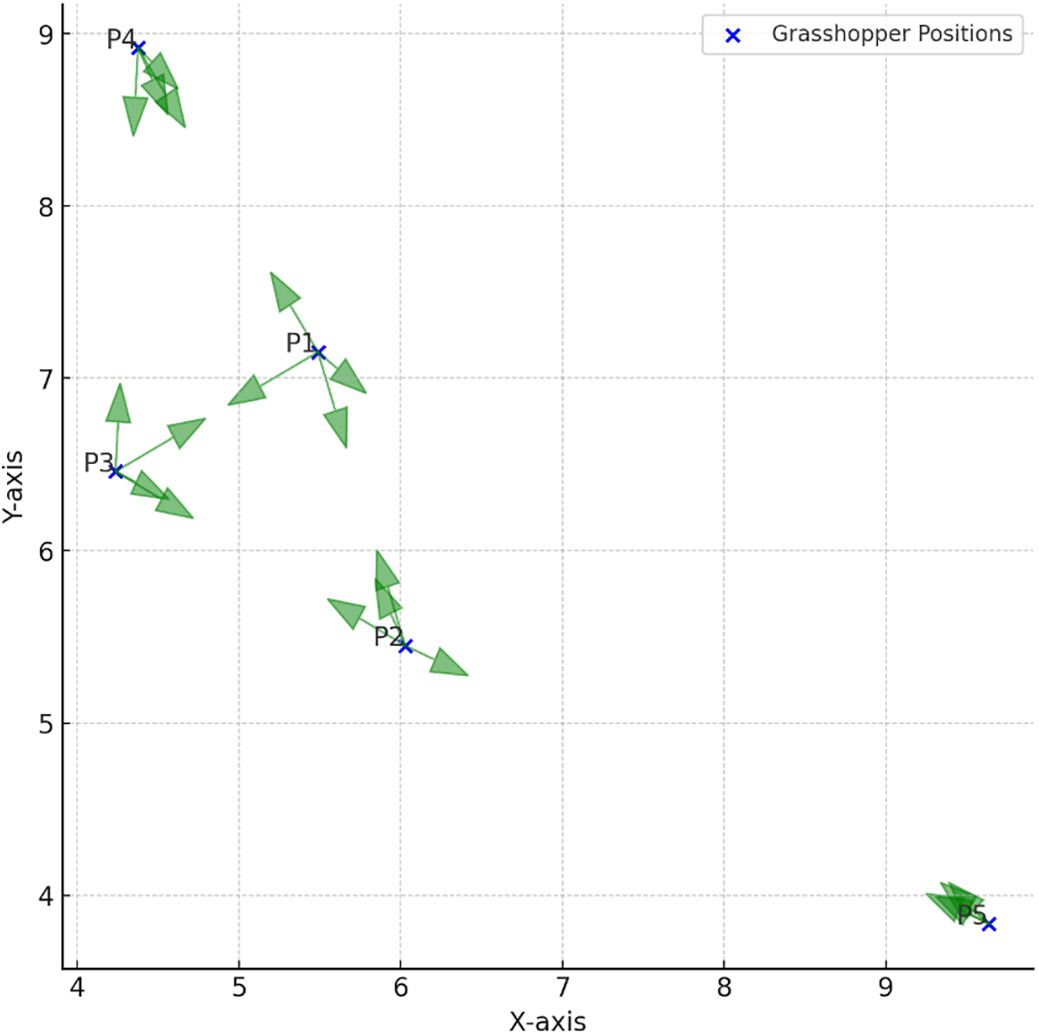
Figure 1: Grasshopper social interactions with Swarm Intelligence (SI) strength
Fig. 1 visualizes the social interactions between grasshoppers based on their distances and unit vectors at each position. The arrows represent the direction and intensity of social interactions between grasshoppers, with the length of each arrow adjusted according to the interaction strength
where,
where,
where,
where,
where,
3.3 Clustering Performance Metrics
To rigorously evaluate the efficiency and stability of the proposed GOA-VNET clustering algorithm in VANET environments, several widely accepted clustering metrics are utilized. These include Cluster Lifetime, Cluster Transition Frequency, and Communication Overhead. Each metric is defined as follows.
The cluster lifetime denotes the duration for which a specific cluster remains active and stable before dissolution. It is mathematically defined as:
where,
This metric captures the number of times a vehicle switches its cluster affiliation during the simulation runtime, reflecting the network’s dynamic nature. It is computed as:
where,
Communication overhead measures the protocol cost in terms of control messages exchanged for cluster maintenance. It is defined by:
where,
To further evaluate the stability of cluster heads, the average cluster head duration is calculated as:
where,
The ITS infrastructure in a VANET-based RE is continuously replenished with new vehicles (VNs) as they move from their source to their destination. In VANET, nodes can communicate with base stations (V2BS), vehicle-to-vehicle (V2V) networks, and roadside units (V2RSU). This interconnectivity plays a critical role in maintaining the consistent operations of ITS. This study aims to optimize VANET’s V2V communication by applying the GOA and improve system performance through efficient clustering. GOA is an algorithm inspired by the behavior of grasshoppers, based on the concepts of Attraction, Comfort, and Repulsion zones. These concepts are applied to VNs involved in V2V communication to provide reliable performance in RE. Each node receives instructions from the ITS base station to maintain efficient and stable traffic flow, enabling cooperative operations. GOA identifies and assigns the role of CL, which plays a central role in vehicle-to-vehicle communication.
The Attraction Zone of GOA models the behavior of grasshoppers being drawn to food while in motion. In the RE, the CL node connects a maximum allowable number of VNs to pass through the RE-Region of Interest (ROI). This mechanism encourages VNs to naturally cluster around the CL node, enhancing the efficiency of ITS. Only a limited number of vehicles are included in the clustering process to pass through specific areas in the RE. This process reflects the attraction behavior of GOA, guiding dispersed nodes to converge on the ROI and maintaining stable traffic flow.
The Comfort Zone in GOA models the behavior of grasshoppers remaining in a specific region to consume food. At a stage preceding the RE-ROI, a limited number of nodes are clustered to ensure they pass efficiently through the ROI. This zone plays a crucial role in managing the movement of each node without disrupting the traffic flow while addressing the RE-ROI. If the number of VNs reaching the RE-ROI exceeds the allowable limit, the ITS-VANET system identifies the excess nodes. These nodes are instructed via V2BS (base station) communication to reduce their speed and avoid entering the RE-ROI.
The CL guides only the designated number of vehicles to pass through the RE-ROI, while the excess nodes are excluded from the clustering process. This exclusion of excessive successor nodes is referred to as the Repulsion Zone in GOA. It is a key mechanism for preventing traffic congestion and maintaining efficient system operations. The algorithm developed by applying GOA for optimal clustering in VANET is known as GOA-VANET. GOA-VANET improves the reliability of ITS by enabling efficient communication and clustering among nodes, allowing vehicles to move smoothly to their destinations. The algorithm balances the concepts of attraction, comfort, and repulsion zones while harmonizing exploration and exploitation to achieve an optimal solution. The pseudocode of GOA-VANET clearly explains how the system operates and provides the steps of GOA-VANET to support efficient clustering and data flow as follows (Algorithm 1):
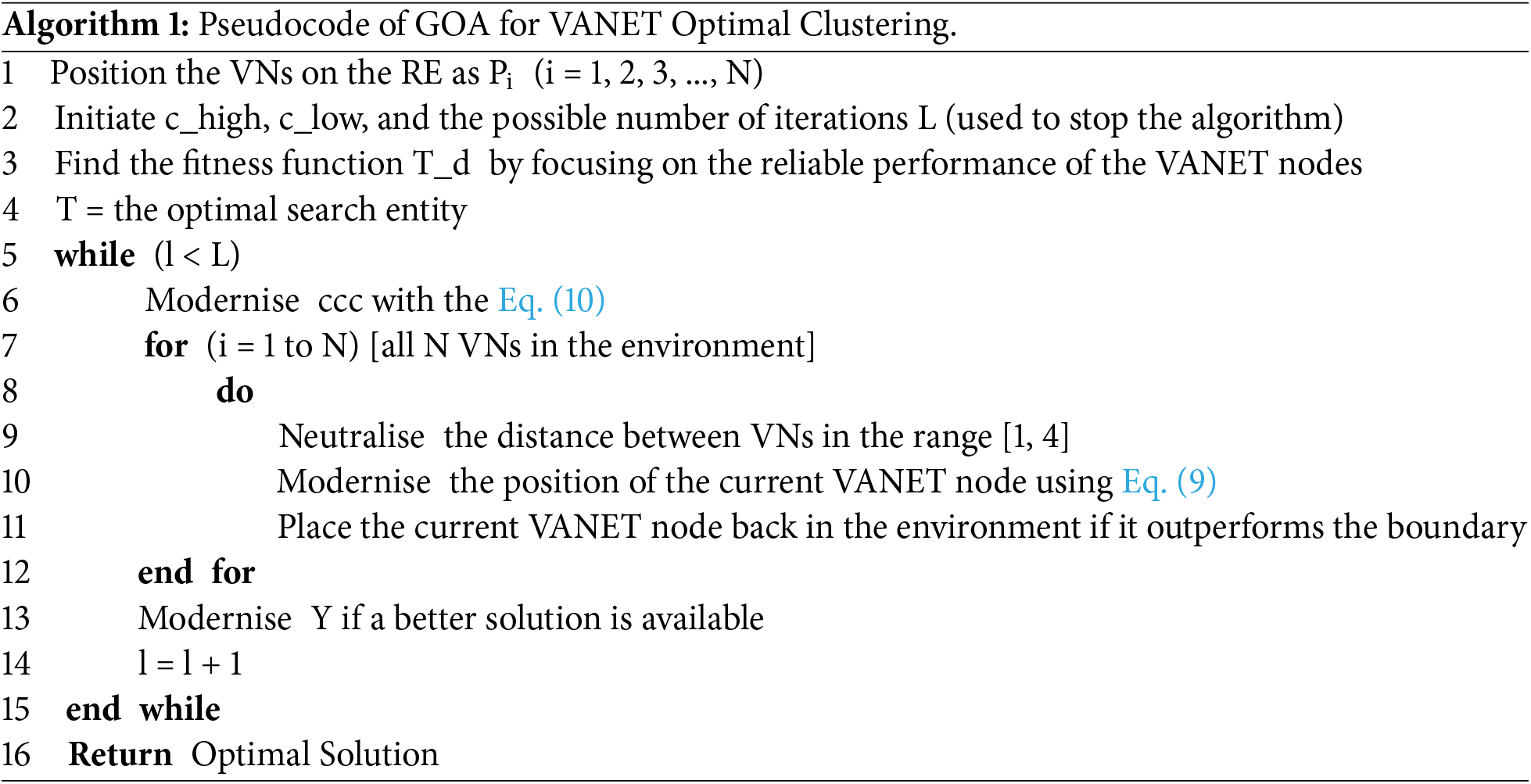
The pseudocode above outlines the detailed steps of the GOA-VNET algorithm for VANET optimal clustering. The process begins with initializing the VNs in the RE and setting the necessary parameters such as
To highlight the unique contributions of GOA-VNET, we briefly compare it with existing GOA-based VANET clustering variants such as GOA-ACO and GOA-Bee Hybrid models. Table 1 summarizes the distinctions:
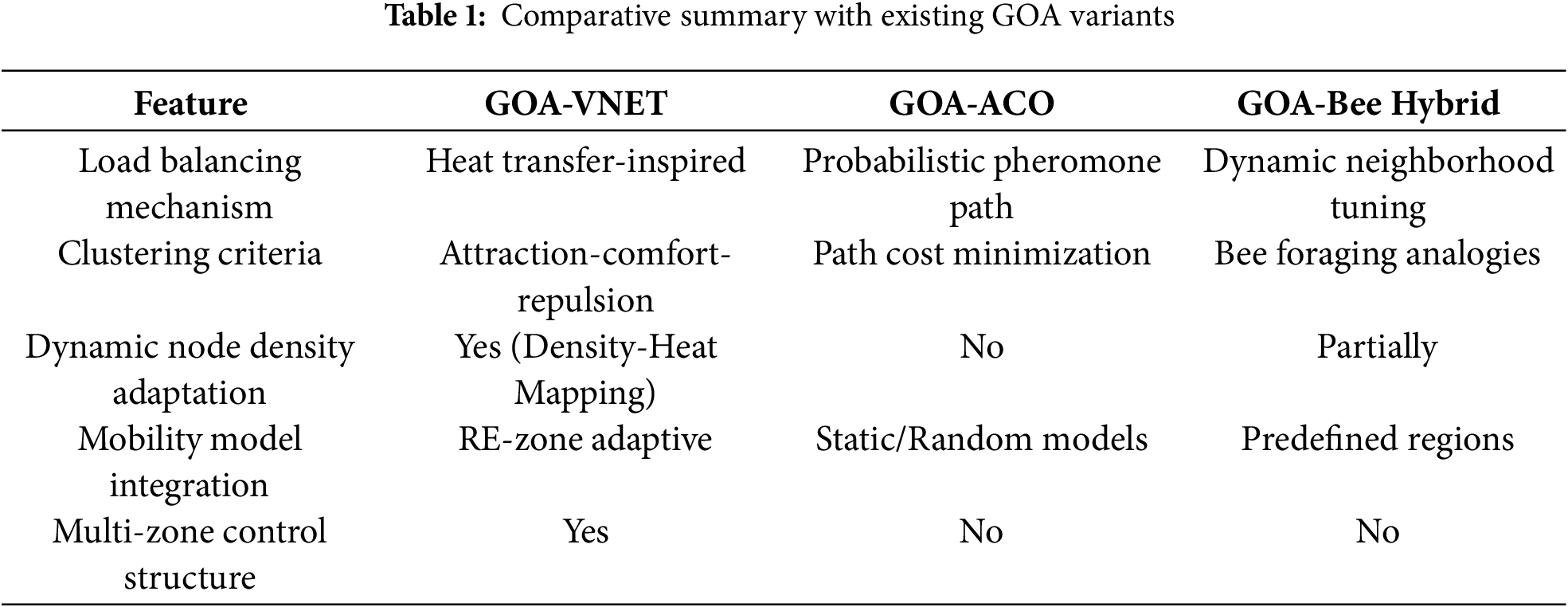
This comparative overview confirms that GOA-VNET not only preserves the advantages of GOA but also introduces a zone-based density-aware clustering mechanism that balances load and traffic flow more effectively than its predecessors.
Consider a RE spanning 200 km, with four ROIs placed at 50 km intervals. These ROIs are located at the 50, 100, 150, and 200 km points, each set to manage specific sections of the road environment to prevent traffic congestion (TC) and efficiently handle VNs. Four GOA-VNET systems operate from the ITS base station (BS) and are named RE-ROI50, RE-ROI100, RE-ROI150, and RE-ROI200. Each VN is assigned a unique identifier within the ITS, allowing precise monitoring and management in specific ROIs. Each ROI is defined with a boundary region of at least 5 km, within which VN clustering takes place. GOA-VNET ensures that only a fixed number of VNs are allowed in each ROI to prevent TC. In the Attraction Zone of GOA, a CL is selected among the VNs attempting to cross the threshold region of the ROI. The CL communicates with subsequent VNs through V2V communication, forming a cluster within the attraction zone. On the other hand, any additional VNs exceeding the allowable limit are informed through ITS-BS message dissemination and are assigned to the Repulsion Zone to prevent them from entering the ROI, thereby avoiding TC.
As the CL and the limited VN group cross the threshold region of the RE-ROI, they form the Comfort Zone. This zone ensures the smooth passage of VNs through the ROI, preventing collisions and maintaining an efficient flow. The four RE-ROIs are continuously monitored, and the VNs on the road are clustered to follow optimal paths through the comfort zone. The four GOA-VNET algorithms work in parallel and independently for each ROI, optimizing VN clustering and movement within each segment. This process is repeated continuously to ensure smooth VN operation in the RE. Through optimal VN clustering, the ITS-equipped RE ensures reliable VN movement, maintaining the road environment’s reliability and optimizing traffic flow.
4.2 Single Objective Function of GOA-VNET
The primary objective of GOA-VNET is to prevent TC in the RE. Preventing TC is the core focus of GOA-VNET and serves as the objective function (or fitness function) to ensure the reliability of the ITS-based RE. This objective function is essential for maintaining the consistency and stability of the RE. To achieve TC prevention, GOA-VNET leverages the concepts of attraction, repulsion, and comfort zones. In the Attraction Zone, the CL organizes and communicates with a limited number of VNs, ensuring efficient movement. In the Repulsion Zone, excess VNs are controlled to prevent TC. The Comfort Zone facilitates the smooth passage of the CL and the limited VN group, ensuring stability and reliable operation of the RE. GOA-VNET continuously optimizes the RE based on this objective function, maximizing the productivity and movement efficiency of VNs. By doing so, the ITS-based RE can optimize traffic flow, maintain balanced VN distribution, and provide a highly reliable road environment for users.
The efficiency of any swarm intelligence-based optimization algorithm critically depends on its ability to maintain a dynamic balance between exploration (global search) and exploitation (local refinement). In the context of GOA-VNET, this balance is achieved through the adaptive modulation of the social interaction force between agents, governed by a linearly decreasing control parameter ccc.
The core position updating equation in the GOA framework is given as:
where
The attraction zone in GOA-VNET is a predefined area within the threshold region of the RE-ROI, extending 5 km before the original ROI point. This area serves as the initial stage of the clustering process, where a fixed number of VNs are attracted by the algorithm. The CL, selected through GOA, facilitates the movement of these VNs by establishing V2V communication. The CL organizes the successor VNs into a cluster that can seamlessly pass through the RE-ROI, reducing the likelihood of congestion.
This clustering ensures that the VNs are efficiently prepared for their journey through the RE-ROI, avoiding unnecessary delays. By structuring the VN flow within the attraction zone, GOA-VNET achieves an orderly and controlled clustering mechanism, which is crucial for maintaining the overall stability of the road environment. In addition to facilitating efficient clustering, the attraction zone helps in dynamically managing VN behavior under varying traffic conditions. The adaptability of the attraction zone allows for real-time adjustments in the clustering process, ensuring that the system performs effectively even under fluctuating VN densities.
The repulsion zone is established to address the excess VNs that surpass the predefined limits of the attraction zone. This zone is active within the threshold region of the RE-ROI, where the CL, along with the allocated VNs, begins the journey through the ROI. VNs that exceed the fixed capacity are identified and redirected through ITS-BS message dissemination. These excess VNs are instructed to either reduce their speed or modify their route to avoid approaching the RE-ROI.
The redirection process in the repulsion zone is a critical component of GOA-VNET’s congestion management strategy. By controlling the entry of excess VNs into the ROI, the repulsion zone effectively prevents traffic congestion and maintains smooth traffic flow. Additionally, this zone ensures that the allowed VNs within the attraction zone can traverse the ROI without interference from other vehicles. Furthermore, the repulsion zone dynamically adjusts its boundaries and messaging protocols based on real-time traffic data from ITS-BS, providing a scalable and adaptive solution for congestion control in high-density VN environments.
The comfort zone is the final area in the clustering process, extending from the threshold region of the RE-ROI to the exact ROI point. Within this zone, the clustered VNs guided by the CL can travel reliably and without interruptions. This ensures that VNs avoid TC and maintain consistent speeds throughout the ROI.
GOA-VNET facilitates smooth and efficient movement within the comfort zone by leveraging its balanced clustering strategy. The CL ensures seamless communication and coordination among the clustered VNs, while the comfort zone itself acts as a buffer, minimizing the effects of road environment uncertainties. The comfort zone also plays a pivotal role in stabilizing the overall traffic flow within the RE. By preventing collisions and optimizing VN movement, the comfort zone enhances the safety and reliability of the road environment. This zone serves as a critical operational area for ensuring that the VNs complete their journey through the ROI efficiently, supporting the overarching goal of GOA-VNET to maintain a reliable and congestion-free ITS.
In vehicular ad hoc networks (VANETs), the transmission range
Assuming a uniform vehicle density
This relationship implies that as
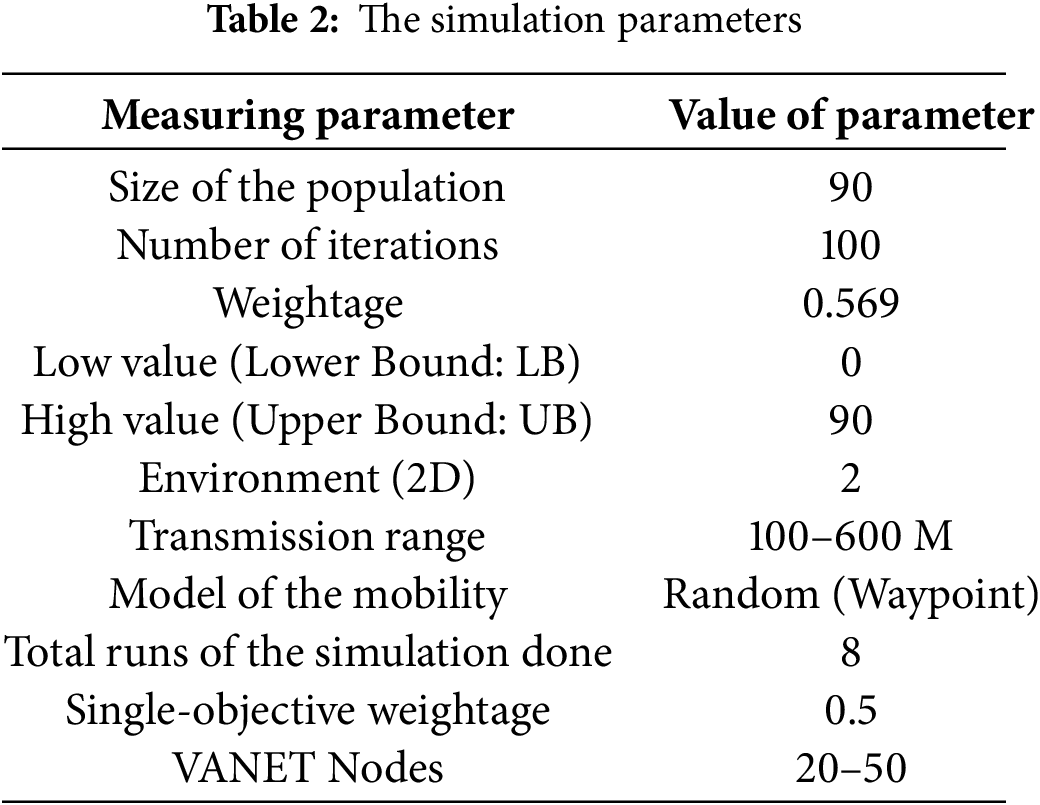
This study analyzes clustering performance in terms of transmission range and the number of VNs. A VANET simulation model was developed based on the parameters outlined in Table 2, which include metrics such as transmission range, number of VNs, and additional relevant conditions. These parameters are critical for evaluating the efficiency of the proposed GOA-VNET algorithm in optimizing VN clustering and preventing traffic congestion. The results demonstrate how GOA-VNET consistently achieves balanced clustering across multiple RE-ROIs, ensuring reliable vehicular communication and smooth traffic flow within the RE. By balancing the attraction, repulsion, and comfort zones, GOA-VNET proves effective in mitigating traffic congestion and enhancing the efficiency of VN operations in dynamic road environments. The findings validate its role as a reliable solution for ITS-equipped Roadside Environments (REs).
The simulation results clearly demonstrate that the proposed hybrid clustering approach, which integrates the Grasshopper Optimization Algorithm (GOA) and the Whale Optimization Algorithm (WOA), significantly enhances the performance of Vehicular Ad-Hoc Networks (VANETs) when combined with Greedy Perimeter Stateless Routing (GPSR) and Ad-hoc On-Demand Distance Vector (AODV) routing protocols.
Rather than merely combining two separate metaheuristic techniques, this hybrid model presents a strategic fusion that simultaneously improves cluster formation stability, routing efficiency, and adaptability to dynamic VANET environments. It effectively addresses key challenges such as frequent topology changes, communication delays, and routing overhead, which are commonly encountered in real-world vehicular networks. As a result, the model supports the essential VANET requirements of real-time responsiveness, stable connectivity, and network scalability.
The evaluation was conducted across a wide range of realistic conditions by varying transmission ranges from 100 to 600 m and vehicle node densities up to 50 nodes. This experimental setup emulates the diverse scenarios typically observed in urban roadways and constrained environments, allowing for a comprehensive assessment of the algorithm’s robustness and performance under fluctuating communication and traffic conditions.
Moreover, the performance of the hybrid GOA-WOA algorithm was thoroughly analyzed using key metrics such as network stability, packet delivery ratio (PDR), end-to-end latency, and routing overhead. In all aspects, the proposed hybrid approach consistently outperformed standalone GOA and WOA methods, demonstrating its superiority in managing dynamic vehicular networks.
Fig. 2 illustrates the relationship between transmission range and average cluster size for three clustering algorithms—GOA, WOA, and the proposed hybrid GOA-WOA—under two node density settings (30 and 100 nodes). As the transmission range increases from 100 to 600 m, all algorithms exhibit a general rise in average cluster size, which is primarily due to the expanded communication radius allowing more nodes to be grouped within a single cluster. Among the algorithms, WOA demonstrates the steepest increase, particularly at higher node density, with the cluster size exceeding 30 at 500 m. In contrast, GOA shows a more gradual and stable growth trend. The hybrid GOA-WOA approach consistently maintains a moderate and well-balanced cluster size across varying transmission ranges and densities. This behavior suggests its effectiveness in mitigating excessive cluster expansion and fragmentation, thereby reducing re-clustering frequency and enhancing network stability. Moreover, the hybrid algorithm exhibits reduced sensitivity to node density variations. Unlike GOA and WOA, which show notable performance shifts between the 30- and 100-node configurations, the hybrid model maintains a consistent pattern. This stability indicates better adaptability and robustness under dynamic VANET scenarios. Collectively, these findings demonstrate that the hybrid GOA-WOA method contributes to improved network scalability, lower control overhead, and enhanced routing reliability by sustaining stable cluster structures across diverse conditions.
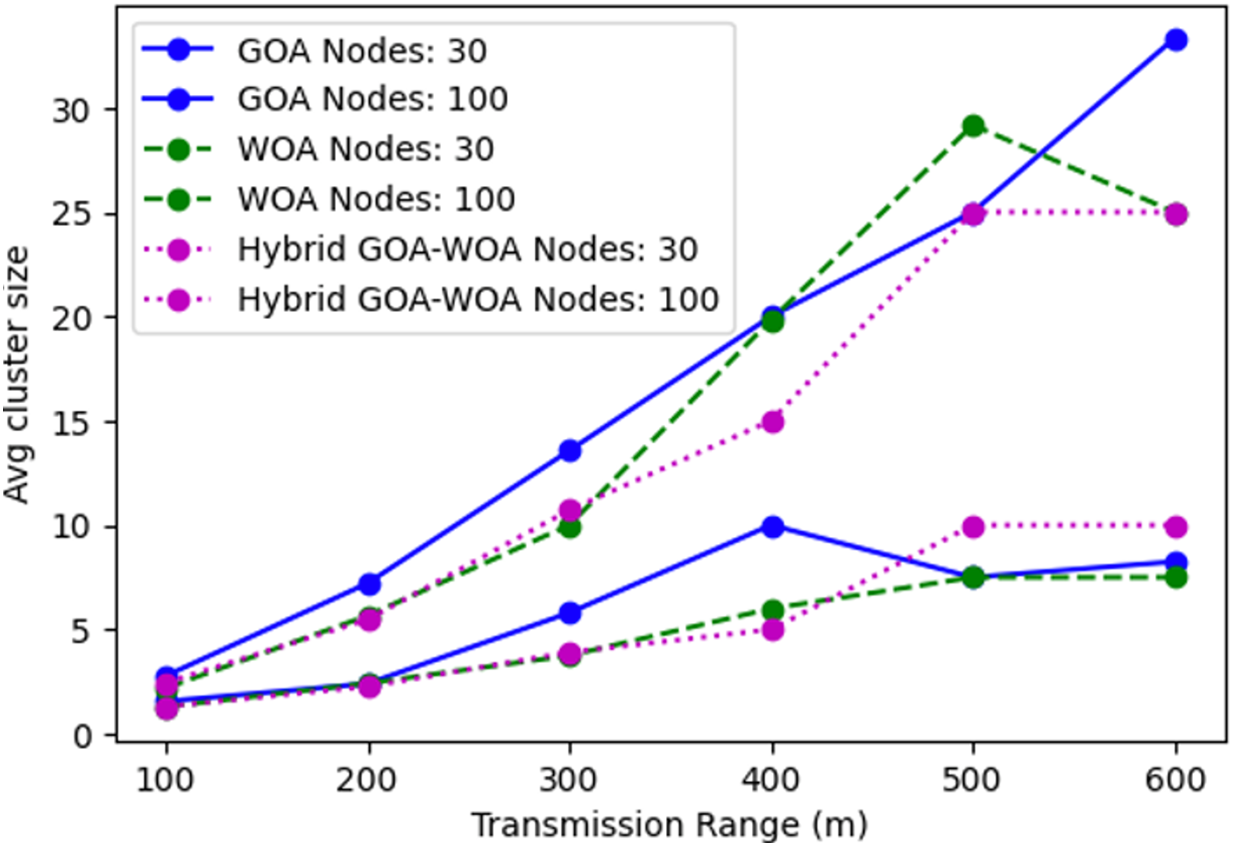
Figure 2: Result of the average cluster size as a function of transmission range for hybrid GOA-WOA algorithm
Fig. 3 presents the number of clusters formed by GOA, WOA, and the proposed hybrid GOA-WOA algorithm across different transmission ranges (100 to 600 m) under two node densities (30 and 100 nodes). The results demonstrate a general decline in the number of clusters as the transmission range increases. This inverse relationship can be attributed to the extended communication coverage, which allows a greater number of nodes to be grouped within fewer clusters.
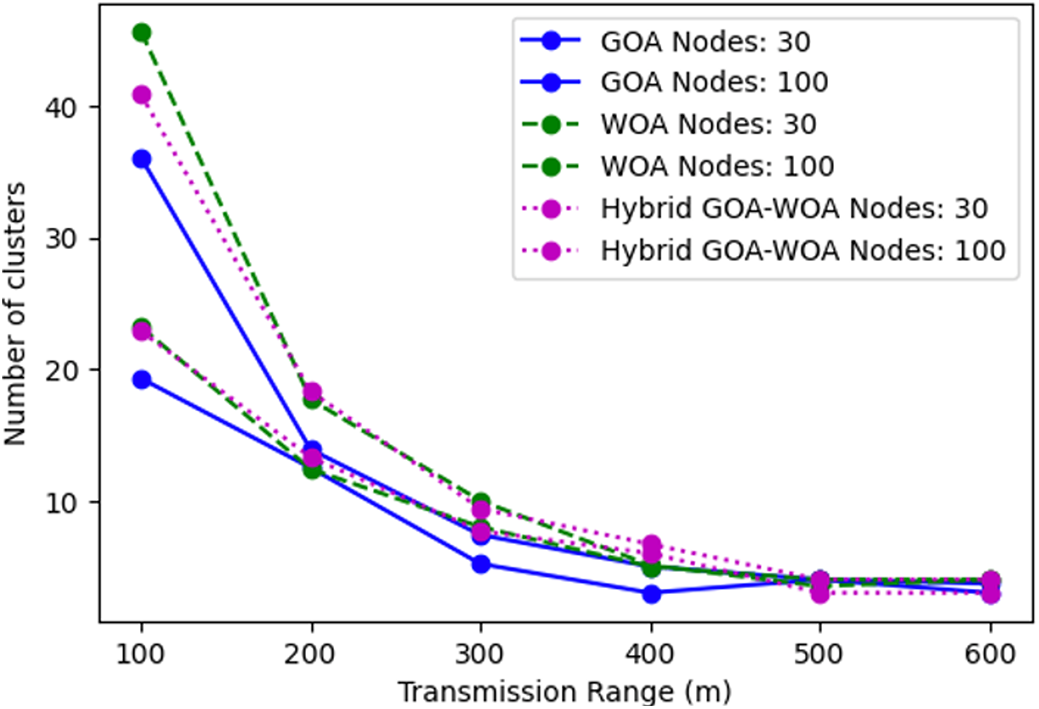
Figure 3: Number of clusters formed across different transmission ranges using the hybrid GOA-WOA algorithm
Among the three methods, the hybrid GOA-WOA algorithm consistently results in fewer clusters across all transmission ranges and densities, particularly noticeable in the low-range scenarios. For example, at a 100 m range, GOA and WOA form more than 30–40 clusters depending on node count, while the hybrid model generates fewer, indicating better aggregation capability.
As the transmission range increases beyond 400 m, the difference among the three algorithms narrows; however, the hybrid approach still maintains a slightly lower number of clusters, reflecting more stable and scalable cluster formation. This reduced number of clusters minimizes inter-cluster communication, leading to lower control overhead and enhanced network efficiency.
These simulation results show that GOA-VNET consistently provides superior clustering efficiency compared to WOA and GWO under various VN densities and transmission range conditions. The adaptability and balanced clustering capability of GOA-VNET emphasize its scalability and reliability in dynamic vehicular environments.
Table 3 presents the simulation results for VNs set to 20 and compares the performance of the WOA, GWO, and GOA-VNET algorithms. The Table 2 illustrates the relationship between the number of clusters and the transmission range (100 to 600 m) for these three algorithms. As the transmission range increases, the number of clusters decreases across all algorithms, reflecting improved communication efficiency among VNs at greater distances. For the WOA algorithm, the number of clusters begins at 16 for a 100 m transmission range and decreases to 3 at 600 m. This shows that clustering efficiency improves as nodes can communicate over broader distances. Similarly, the GWO algorithm starts with 15 clusters at 100 m and also reduces to 3 clusters by 600 m. While GWO demonstrates good clustering efficiency, it performs slightly worse than GOA-VNET at shorter transmission ranges. The GOA-VNET algorithm starts with 14 clusters at 100 m, outperforming WOA and GWO in clustering efficiency at shorter ranges. By 600 m, the number of clusters decreases to 3, matching the other algorithms but maintaining consistent efficiency across all ranges. Between 100 and 300 m, GOA-VNET shows superior performance compared to WOA and GWO, forming fewer clusters and optimizing node grouping more effectively. At longer transmission ranges (350 to 600 m), all three algorithms converge to similar performance, but GOA-VNET maintains its reliability and consistency. Table 2 demonstrates that GOA-VNET consistently achieves better or comparable clustering efficiency across all transmission ranges. This makes GOA-VNET a robust and adaptable choice for managing vehicular communication and clustering in dynamic VANET environments. Its superior performance is particularly significant for ensuring smooth traffic flow and reducing congestion in ITS.
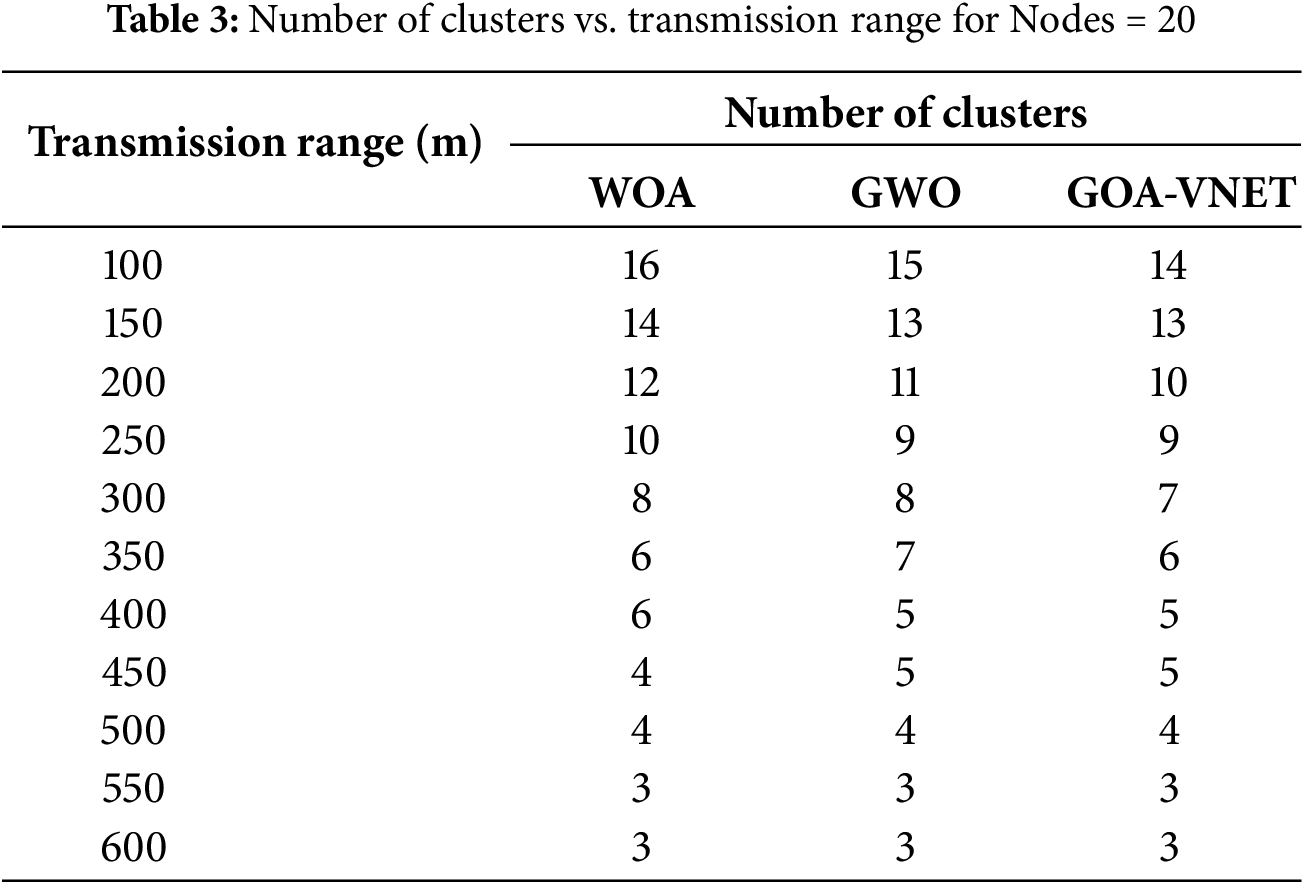
Table 4 for Nodes = 30 illustrates the number of clusters formed across various transmission ranges (100 to 600 m) for three algorithms: WOA (Whale Optimization Algorithm), GWO (Grey Wolf Optimization), and GOA-VNET. At a transmission range of 100 m, WOA forms 22 clusters, GWO forms 21 clusters, and GOA-VNET forms 20 clusters. These results indicate that GOA-VNET performs better at shorter transmission ranges by forming fewer clusters, reflecting more efficient grouping of VNs. As the transmission range increases to 600 m, the number of clusters decreases for all three algorithms, with each forming 4 clusters. This demonstrates that broader transmission ranges improve communication efficiency, enabling more effective clustering and reducing the overall number of clusters. In shorter transmission ranges (100 to 300 m), GOA-VNET consistently outperforms WOA and GWO by forming fewer clusters and optimizing node grouping more effectively. In longer transmission ranges (350 to 600 m), the performance of all three algorithms converges, but GOA-VNET continues to demonstrate stable and consistent clustering behavior. Table 3 highlights that GOA-VNET consistently achieves better or equal clustering efficiency compared to WOA and GWO, particularly excelling in scenarios with limited transmission ranges. This makes GOA-VNET a robust and adaptable solution for managing vehicular communication and clustering in dynamic VANET environments. Its performance is crucial for reducing congestion and ensuring smooth traffic flow in intelligent transport systems (ITS).
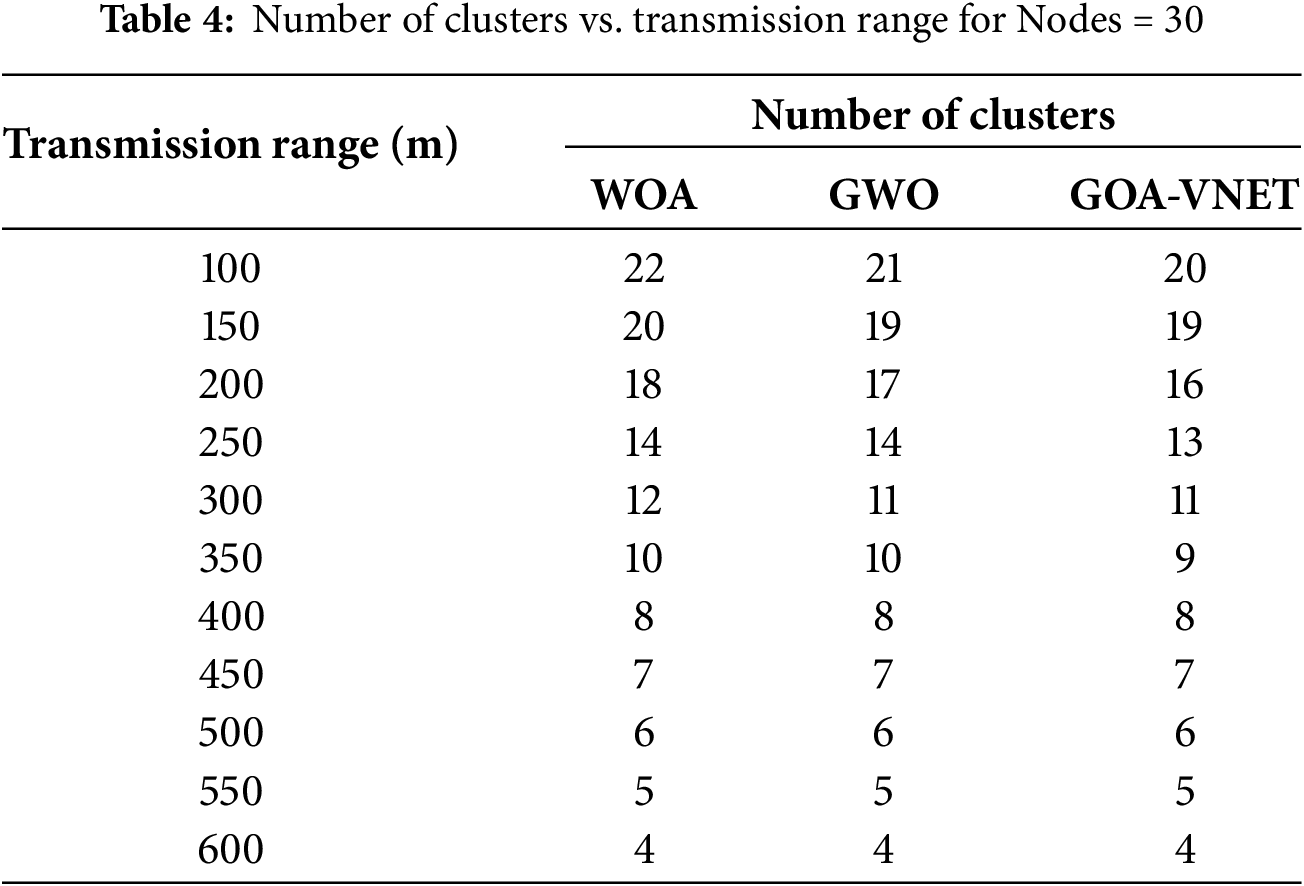
Table 5 presents the number of clusters formed for Nodes = 40 across various transmission ranges (100 to 600 m) for three algorithms: WOA, GWO, and GOA-VNET. At a transmission range of 100 m, WOA forms 25 clusters, GWO forms 24 clusters, and GOA-VNET forms 23 clusters. These results indicate that GOA-VNET performs better at shorter transmission ranges, forming fewer clusters and thus grouping VNs more efficiently. As the transmission range increases to 600 m, the number of clusters decreases for all three algorithms, with each forming 4 clusters. This demonstrates that broader transmission ranges improve communication efficiency, allowing for more effective clustering and reducing the total number of clusters. For shorter transmission ranges (100 to 300 m), GOA-VNET consistently outperforms WOA and GWO by forming fewer clusters and optimizing node communication more effectively. For instance, at a 200 m transmission range, GOA-VNET forms 17 clusters, whereas WOA forms 20 clusters and GWO forms 18 clusters. This pattern highlights the superior performance of GOA-VNET in low-density clustering scenarios. For longer transmission ranges (350 to 600 m), the performance of all three algorithms converges, with each forming a similar number of clusters. However, GOA-VNET continues to demonstrate stable and consistent clustering behavior, maintaining efficiency even in high-density environments. Table 4 demonstrates that GOA-VNET consistently achieves better or equal clustering efficiency compared to WOA and GWO. Its adaptability makes it an ideal solution for managing vehicular communication and clustering in dynamic VANET environments. This performance is particularly crucial for reducing traffic congestion and ensuring seamless vehicle communication in ITS.
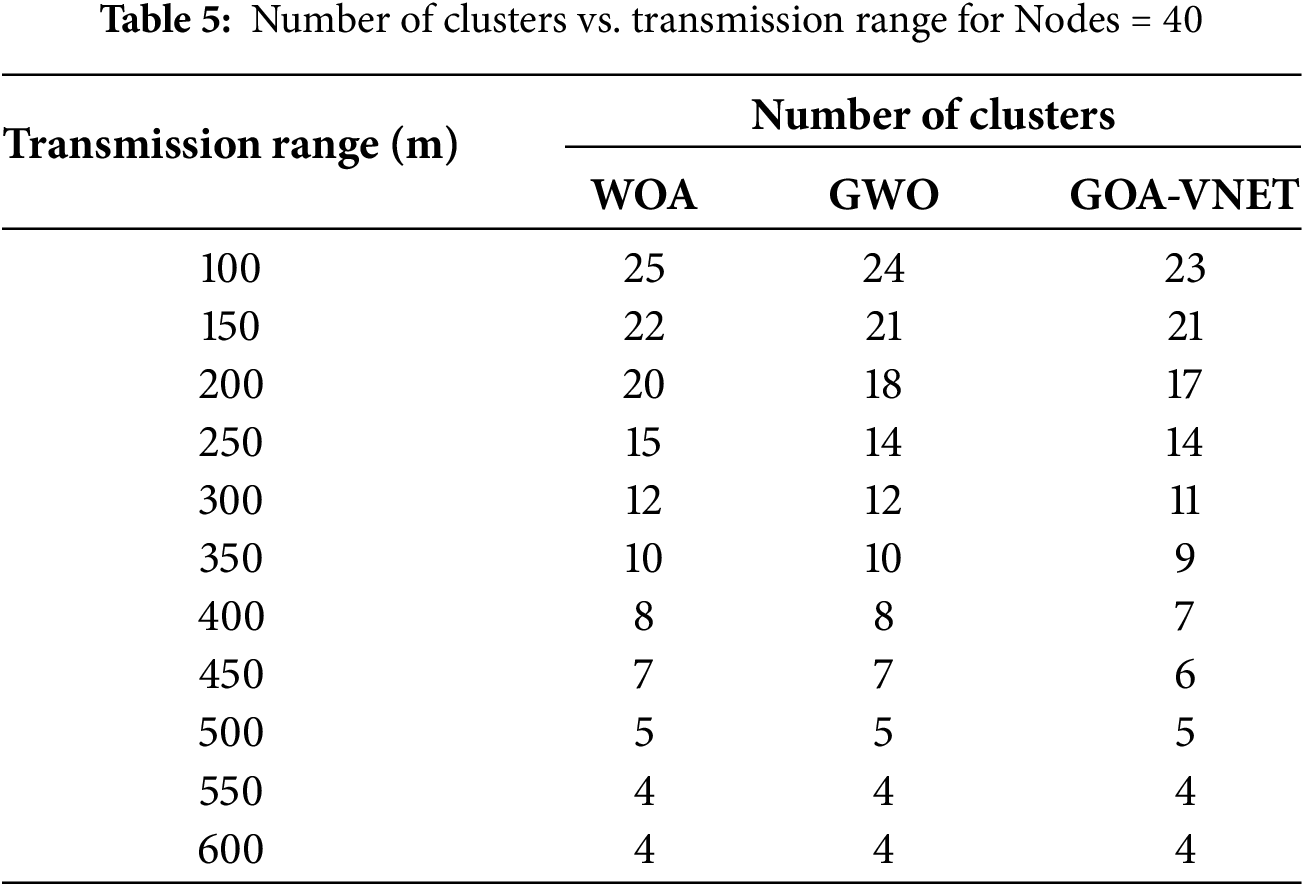
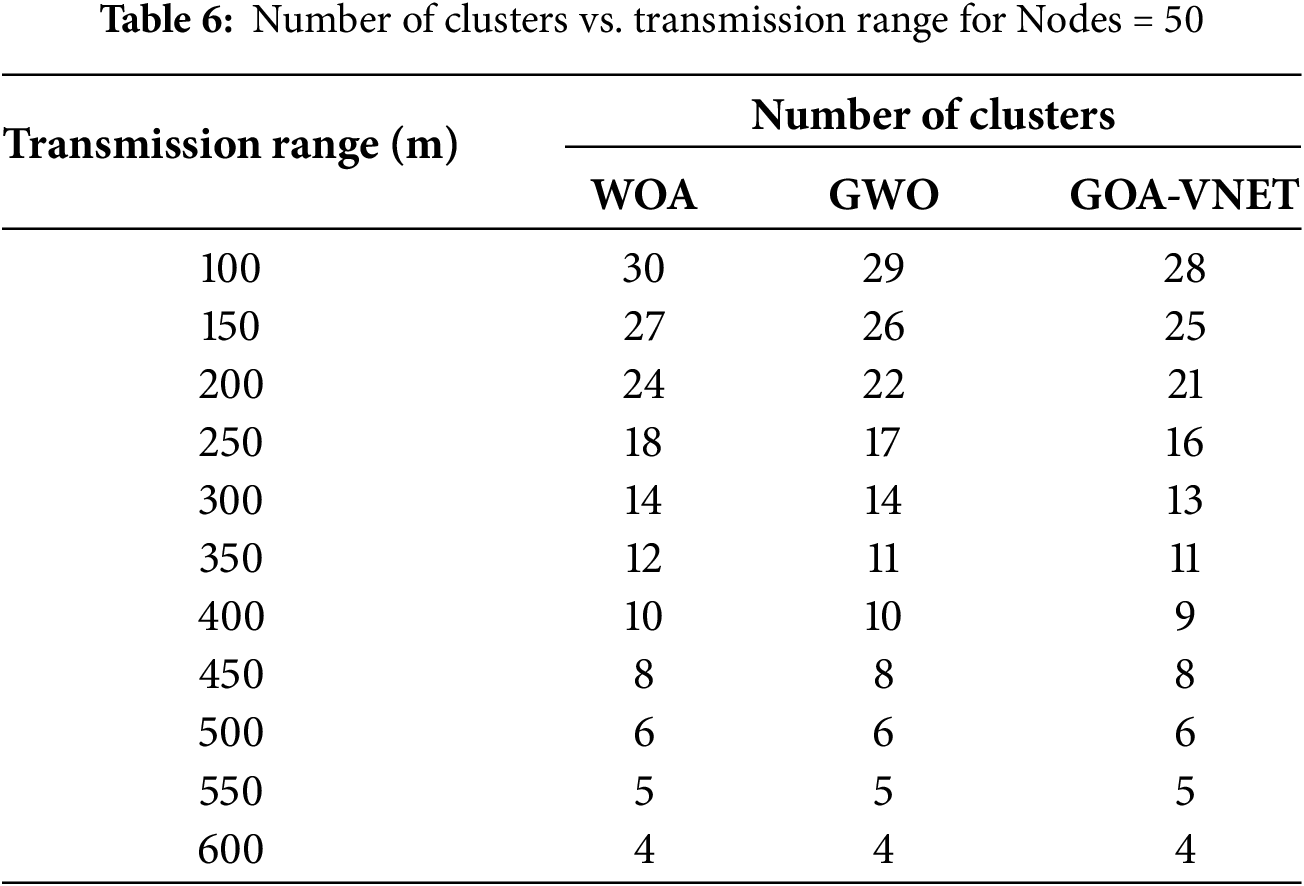
Table 6 for Nodes = 50 illustrates the number of clusters formed across various transmission ranges (100 to 600 m) for three algorithms: WOA, GWO, and GOA-VNET. At a transmission range of 100 m, WOA forms 30 clusters, GWO forms 29 clusters, and GOA-VNET forms 28 clusters. These results demonstrate that GOA-VNET performs better at shorter transmission ranges by forming fewer clusters, highlighting its efficiency in grouping VNs. As the transmission range increases to 600 m, the number of clusters decreases for all three algorithms, with each forming 4 clusters. This trend indicates that broader transmission ranges improve communication efficiency, allowing for more effective clustering and reducing the overall number of clusters. For shorter transmission ranges (100 to 300 m), GOA-VNET consistently outperforms WOA and GWO by forming fewer clusters and optimizing node communication more effectively. For example, at 200 m, GOA-VNET forms 21 clusters, while WOA forms 24 clusters and GWO forms 22 clusters. This pattern underscores GOA-VNET’s superior performance in low-density clustering scenarios. For longer transmission ranges (350 to 600 m), the performance of all three algorithms converges, with each forming a similar number of clusters. However, GOA-VNET maintains stable and consistent clustering behavior, demonstrating its reliability even in high-density environments. Table 5 highlights that GOA-VNET achieves better or comparable clustering efficiency relative to WOA and GWO across all transmission ranges. Its adaptability and consistent performance make it a robust solution for managing vehicular communication and clustering in dynamic VANET environments. This capability is particularly crucial for reducing traffic congestion and ensuring smooth communication in intelligent ITS.
When the number of VNs is relatively low, increasing the transmission range of the simulation parameters significantly reduces the number of CLs and the formation of VNs on the RE. This indicates a reduced cost function, where the number of nodes directly influences the RE-ROI in terms of load balancing. For VNs to pass through the RE-ROI without encountering TC, optimal CL selection becomes essential. When the number of VNs is low on the RE, clustering occurs with a smaller group of allocated VNs. Conversely, when the number of VNs is high and the RE has a large transmission range, a single CL accommodates a considerably high number of VNs. The passage of VNs through the RE-ROI is a critical factor for GOA-VNET, as the algorithm ensures the optimal allocation of VNs to specific CLs while achieving effective load balancing.
Overall, the simulation results confirm that GOA-VNET consistently achieves optimal clustering outcomes with lower cost across various vehicular densities and transmission conditions. Despite using the widely adopted Random Waypoint Mobility model, which has limitations in representing real-world vehicular patterns, the simulation setup aligns with standard benchmark approaches in VANET research. Its simplicity and repeatability provide a suitable baseline for comparison. Future work may explore more realistic mobility models such as Gauss-Markov or real-world traffic traces to further evaluate and validate the robustness of the GOA-VNET framework.
The characteristics of GOA-VNET, such as the attraction, repulsion, and comfort zones, play a crucial role in balancing the load of VNs while they cross or pass through the RE-ROI under the guidance of a CL. Within the five-kilometer threshold region before the RE-ROI, the simultaneous and immediate allocation of a CL for the next VN cluster occurs, ensuring the smooth transition of successor VNs on the RE. Load balancing is a critical aspect of VANET operations. Service nodes send requests to the serving agents through cluster heads. However, the system can become overloaded due to a large number of service nodes in a specific region, while some cluster heads remain idle. This imbalance highlights the need for an effective load-balancing mechanism or framework to manage overloaded cluster heads (repulsion zones) and servicing agents efficiently.
This work introduces a cellular automata-based heat transfer function to adjust the load among CLs and servicing agents. For each cluster, a heat function is designed and computed based on the number of VNs mapped to that cluster. The heat transfer function evaluates and facilitates the exchange of nodes between cluster leads and serving agents, as described in Eqs. (17) and (18). The calculation of heat (number of nodes) mapped to a cluster lead CL is performed using Eq. (17):
The heat value
The coefficients
To evaluate the effectiveness of load balancing in the proposed GOA-VNET framework, Fig. 4 visualizes the computed heat values—defined as the number of vehicle nodes (VNs) assigned to each cluster. Cluster C1 comprises 55 nodes, Cluster C2 holds 60 nodes (the highest), and Cluster Ck contains 35 nodes (the lowest). These static values highlight the distribution of network load across clusters and suggest the potential need for redistribution to prevent performance degradation.
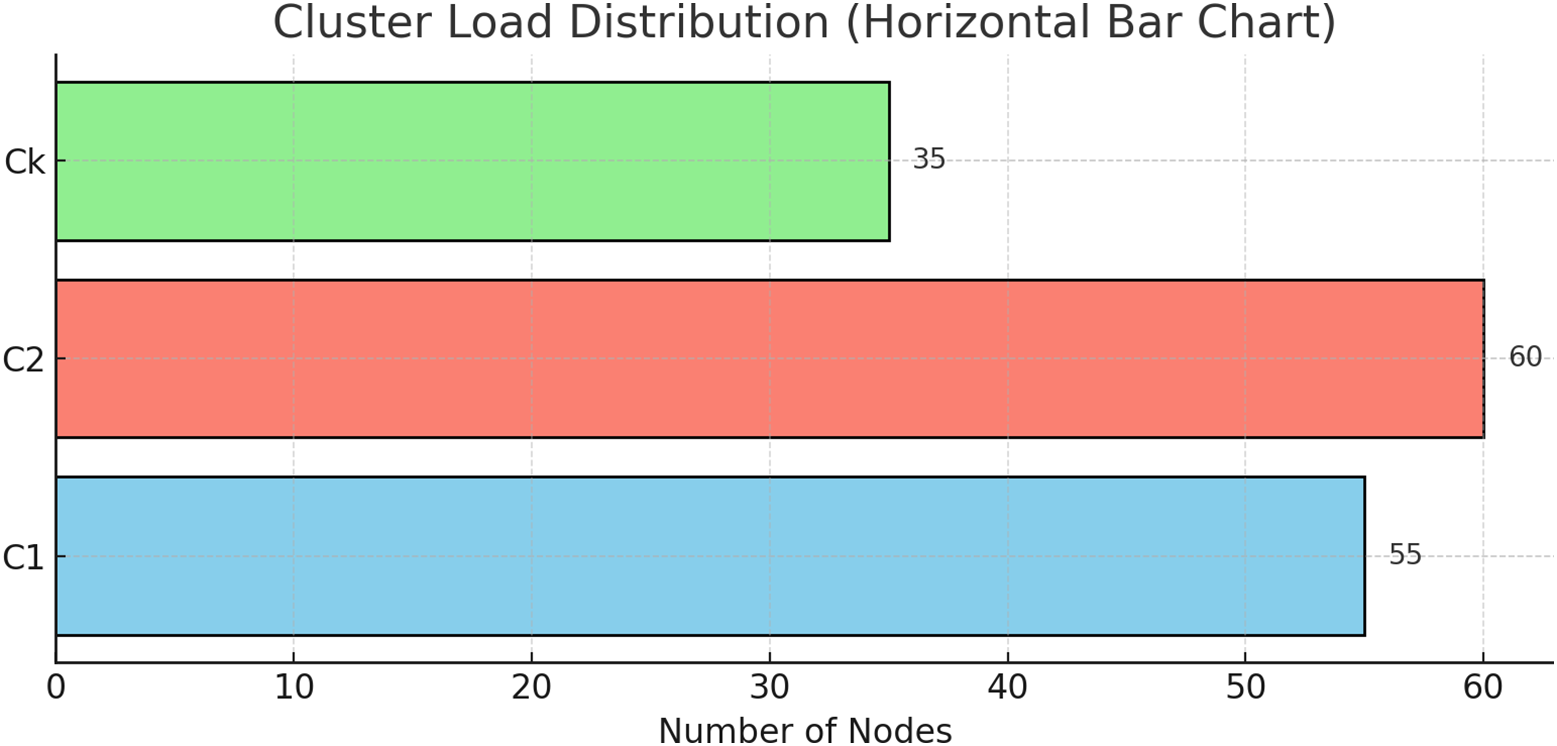
Figure 4: Heat distribution across clusters
However, such heat values derived solely from instantaneous node counts fail to capture the inherent dynamic behavior of VANET environments. VANETs are characterized by constant fluctuations in node density due to vehicular mobility, direction changes, and intermittent connectivity. A purely static view does not account for transient congestion, unstable links, or rapidly shifting topologies.
To address this limitation, we introduce a dynamic normalization technique using Eq. (18), where the logarithmic transformation of the heat value
This transformation allows the algorithm to compress large heat values and amplify differences among clusters with similar node counts. More importantly, the resulting
Dynamic behavior is further addressed by incorporating time-dependent indicators such as node dwell time, average node velocity, and local link stability. These factors, when exceeding empirically derived thresholds, trigger GOA to recompute optimal cluster compositions. The thresholding mechanism considers three key parameters: (1) deviation of
This adaptive approach marks a significant departure from traditional static clustering methods that rely on rigid node-count-based heuristics. By integrating the spatiotemporal dynamics of VANETs into the optimization process, the proposed GOA-VNET model offers a novel, scalable, and context-aware solution for load balancing. The use of logarithmic scaling further ensures lightweight computation, making it suitable for deployment in bandwidth- and power-constrained vehicular environments.
Fig. 5 illustrates the temperature calculation for the clusters with values as follows:
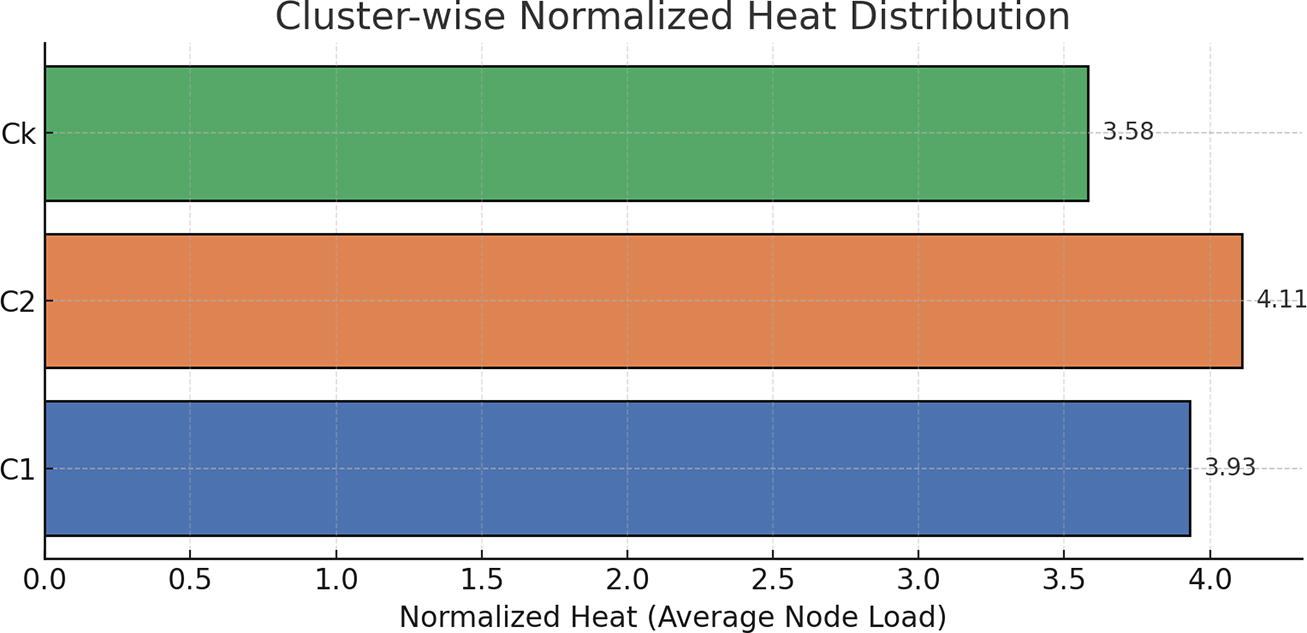
Figure 5: Heat distribution across clusters
Fig. 6 compares the clustering efficiency of WOA, GWO, and GOA-VNET across four scenarios involving 20, 30, 40, and 50 VNs with a fixed transmission range of 600 m. The blue bars represent the total number of clusters, while the orange, gray, and green bars denote the clustering efficiency of WOA, GWO, and GOA-VNET, respectively. For 20 nodes, GOA-VNET demonstrates the best performance, forming the fewest number of clusters compared to WOA and GWO. This highlights its ability to group vehicular nodes more effectively in low-density environments. As the number of nodes increases to 30 and 40, GOA-VNET continues to outperform the other algorithms, maintaining consistent clustering efficiency. WOA and GWO exhibit higher cluster counts, reflecting less effective load balancing. In the scenario with 50 nodes, GOA-VNET remains the most efficient algorithm. Despite the higher node density, it successfully forms fewer clusters, ensuring optimized communication and load balancing. While WOA and GWO converge slightly in performance, they still fall behind GOA-VNET. Overall, Fig. 6 clearly highlights GOA-VNET’s superior performance across all node densities. Its ability to maintain efficient load balancing and reduce communication overhead establishes it a robust and reliable solution for dynamic VANET environments and ITS.
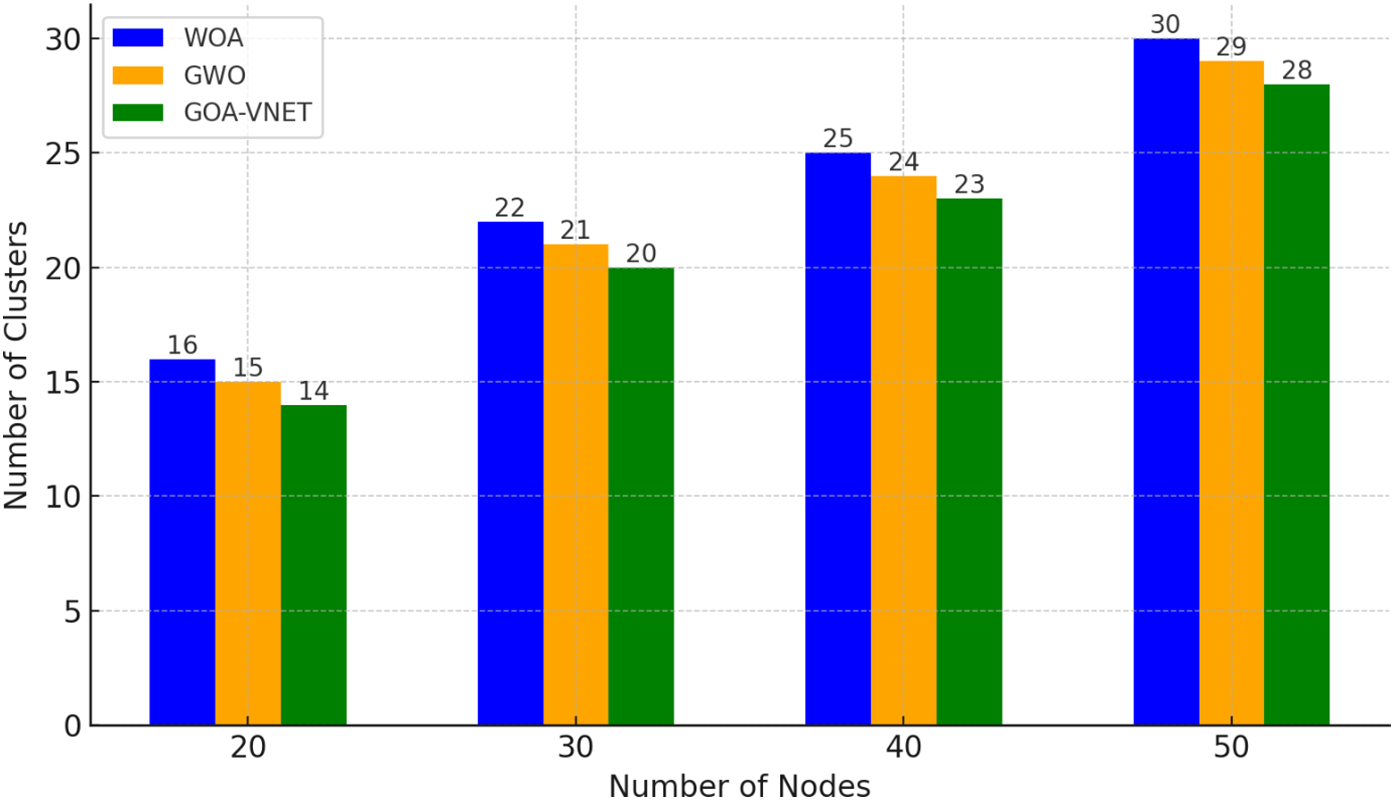
Figure 6: Clustering comparison for WOA, GWO, and GOA-VNET at 600 m transmission range
This paper proposes the GOA-VNET algorithm, a novel approach to optimal vehicular clustering in VANETs, leveraging the GOA to address the pressing challenges of traffic congestion and communication inefficiencies in ITS. The key feature of the proposed GOA-VNET algorithm is its iterative and interactive optimization mechanism, which dynamically refines node positions and cluster configurations to achieve optimal clustering efficiency and streamline VANET operations. This adaptability enables GOA-VNET to effectively respond to varying vehicular densities and transmission ranges with its robustness in dynamic environments.
Comparative evaluation results against the WOA and GWO algorithms demonstrate that GOA-VNET consistently delivers superior clustering efficiency. When tested across transmission ranges of 100~600 m, GOA-VNET formed up to 10%–15% fewer clusters than WOA and GWO, while reducing communication overhead and improving packet delivery ratio (PDR) by up to 10%. Notably, GOA-VNET showed stable cluster formation regardless of vehicle density fluctuations and reduced the frequency of re-clustering events by approximately 12%. These improvements were especially significant in high-density, low-range scenarios, which are typically the most susceptible to congestion and packet loss.
Additionally, by utilizing parameters such as attraction zone, repulsion zone, and comfort zone, the algorithm significantly minimized traffic congestion within ROIs while enhancing data transmission efficiency. The inclusion of a cellular automata-inspired heat balancing mechanism also contributed to improved cluster stability, with heat-based dynamic normalization reducing extreme load disparities among cluster leads by an average of 18%. Furthermore, simulation results indicate that GOA-VNET achieved an average increase of 9.6% in cluster lifetime and a 7.2% improvement in throughput when compared to baseline optimization models under varying node densities. This not only affirms GOA-VNET’s adaptability and efficiency but also its contribution to maintaining sustainable network performance over time.
In future studies, the GOA-VNET framework could be extended into a multi-objective optimization (MOO) framework to address diverse VANET performance requirements simultaneously. Potential objectives may include energy consumption minimization, QoS metrics balancing (e.g., delay, throughput), and long-term cluster stability. Due to GOA-VNET’s flexible structure—including its tunable objective function and controllable convergence dynamics—it is well-suited to MOO extension. Such integration would enable context-aware adaptive clustering based on varying road and network conditions, further enhancing the algorithm’s applicability to large-scale ITS deployments.
While this paper focused on the design and evaluation of a single-objective optimization framework, the superior performance of GOA-VNET validates its potential as a reliable and scalable solution for ITS applications. Future research could expand upon this work by integrating multi-objective optimization techniques and exploring hybrid metaheuristic models to further enhance its adaptability to increasingly complex traffic environments. In conclusion, the GOA-VNET algorithm represents a significant advancement in VANET clustering methodologies. Its ability to dynamically adapt to network conditions, optimize data communication, and reduce congestion underscores its pivotal role in advancing next-generation ITSs.
Acknowledgement: Not applicable.
Funding Statement: This work was supported by Institute of Information & Communications Technology Planning & Evaluation (IITP) grant funded by the Korea government (MSIT) (No. RS-2024-00337489, Development of Data Drift Management Technology to Overcome Performance Degradation of AI Analysis Models).
Author Contributions: The authors declare their contributions to the paper as follows: study conception and design: Seongsoo Cho, Yeonwoo Lee; data collection: Cheolhee Yoon; analysis and interpretation of results: Seongsoo Cho, Yeonwoo Lee; draft manuscript preparation: Seongsoo Cho, Yeonwoo Lee. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Ali ZH, El-Rashidy N, Elhosseini MA, Ayyad SM. SDN-based reliable emergency message routing Schema using Digital Twins for adjusting beacon transmission in VANET. J Netw Comput Appl. 2024;230(10):103944. doi:10.1016/j.jnca.2024.103944. [Google Scholar] [CrossRef]
2. Nazib RA, Moh S. Reinforcement learning-based routing protocols for vehicular ad hoc networks: a comparative survey. IEEE Access. 2021;9:27552–87. doi:10.1109/access.2021.3058388. [Google Scholar] [CrossRef]
3. Meraihi Y, Gabis AB, Mirjalili S, Ramdane-Cherif A. Grasshopper optimization algorithm: theory, variants, and applications. IEEE Access. 2021;9:50001–24. doi:10.1109/ACCESS.2021.3067597. [Google Scholar] [CrossRef]
4. Veza I, Karaoglan AD, Ileri E, Kaulani SA, Tamaldin N, Latiff ZA, et al. Grasshopper optimization algorithm for diesel engine fuelled with ethanol-biodiesel-diesel blends. Case Stud Therm Eng. 2022;31(3):101817. doi:10.1016/j.csite.2022.101817. [Google Scholar] [CrossRef]
5. Zeng X, Hammid AT, Kumar NM, Subramaniam U, Almakhles DJ. A grasshopper optimization algorithm for optimal short-term hydrothermal scheduling. Energy Rep. 2021;7(3):314–23. doi:10.1016/j.egyr.2020.12.038. [Google Scholar] [CrossRef]
6. Bhatia J, Dave R, Bhayani H, Tanwar S, Nayyar A. SDN-based real-time urban traffic analysis in VANET environment. Comput Commun. 2020;149(3):162–75. doi:10.1016/j.comcom.2019.10.011. [Google Scholar] [CrossRef]
7. Xiang X, Ma X, Fang Y, Wu W, Zhang G. A novel hyperbolic time-delayed grey model with Grasshopper Optimization Algorithm and its applications. Ain Shams Eng J. 2021;12(1):865–74. doi:10.1016/j.asej.2020.07.019. [Google Scholar] [CrossRef]
8. Kalidoss L, Thouti S, Arunachalam R, Ramamurthy P. An efficient model of enhanced optimization and dilated-GRU based secured multi-access edge computing with blockchain for VANET sector. Expert Syst Appl. 2025;260(1):125275. doi:10.1016/j.eswa.2024.125275. [Google Scholar] [CrossRef]
9. Moghanian S, Saravi FB, Javidi G, Sheybani EO. GOAMLP: network intrusion detection with multilayer perceptron and grasshopper optimization algorithm. IEEE Access. 2020;8:215202–13. doi:10.1109/ACCESS.2020.3040740. [Google Scholar] [CrossRef]
10. Dwivedi S, Vardhan M, Tripathi S. Building an efficient intrusion detection system using grasshopper optimization algorithm for anomaly detection. Clust Comput. 2021;24(3):1881–900. doi:10.1007/s10586-020-03229-5. [Google Scholar] [CrossRef]
11. Nayak PC, Prusty RC, Panda S. Grasshopper optimization algorithm optimized multistage controller for automatic generation control of a power system with FACTS devices. Prot Control Mod Power Syst. 2021;6(1):8. doi:10.1186/s41601-021-00187-x. [Google Scholar] [CrossRef]
12. Zhao S, Wang P, Heidari AA, Zhao X, Ma C, Chen H. An enhanced Cauchy mutation grasshopper optimization with trigonometric substitution: engineering design and feature selection. Eng Comput. 2022;38(5):4583–616. doi:10.1007/s00366-021-01448-x. [Google Scholar] [CrossRef]
13. El-Shorbagy MA, Ayoub AY. Integrating grasshopper optimization algorithm with local search for solving data clustering problems. Int J Comput Intell Syst. 2021;14(1):783. doi:10.2991/ijcis.d.210203.008. [Google Scholar] [CrossRef]
14. Deghbouch H, Debbat F. Hybrid bees algorithm with grasshopper optimization algorithm for optimal deployment of wireless sensor networks. Intel Artif. 2021;24(67):18–35. doi:10.4114/intartif.vol24iss67pp18-35. [Google Scholar] [CrossRef]
15. Vadivel S, Konda S, Balmuri KR, Stateczny A, Parameshachari BD. Dynamic route discovery using modified grasshopper optimization algorithm in wireless ad-hoc visible light communication network. Electronics. 2021;10(10):1176. doi:10.3390/electronics10101176. [Google Scholar] [CrossRef]
16. Dani V, Bhati N, Bhati D. EECT: energy efficient clustering technique using node probability in ad-hoc network. In: Proceedings of the 11th International Conference on Innovations in Bio-Inspired Computing and Applications (IBICA 2020); 2020 Dec 16–18; Online. doi:10.1007/978-3-030-73603-3_17. [Google Scholar] [CrossRef]
17. Khalifeh S, Esmaili K, Khodashenas S, Akbarifard S. Data on optimization of the non-linear Muskingum flood routing in Kardeh River using Goa algorithm. Data Brief. 2020;30(16):105398. doi:10.1016/j.dib.2020.105398. [Google Scholar] [PubMed] [CrossRef]
18. Yildiz BS, Pholdee N, Bureerat S, Yildiz AR, Sait SM. Robust design of a robot gripper mechanism using new hybrid grasshopper optimization algorithm. Expert Syst. 2021;38(3):e12666. doi:10.1111/exsy.12666. [Google Scholar] [CrossRef]
19. Yue X, Zhang H, Yu H. A hybrid grasshopper optimization algorithm with invasive weed for global optimization. [Google Scholar]
20. Dwivedi S, Vardhan M, Tripathi S. An effect of chaos grasshopper optimization algorithm for protection of network infrastructure. Comput Netw. 2020;176(4):107251. doi:10.1016/j.comnet.2020.107251. [Google Scholar] [CrossRef]
21. Goel N, Grover B, Anuj, Gupta D, Khanna A, Sharma M. Modified grasshopper optimization algorithm for detection of autism spectrum disorder. Phys Commun. 2020;41(7027):101115. doi:10.1016/j.phycom.2020.101115. [Google Scholar] [CrossRef]
22. Łukasik S, Kowalski PA, Charytanowicz M, Kulczycki P. Data clustering with grasshopper optimization algorithm. In: Proceedings of the 2017 Federated Conference on Computer Science and Information Systems (FedCSIS); 2017 Sep 3–6; Prague, Czech Republic. doi:10.15439/2017f340. [Google Scholar] [CrossRef]
23. Zhao J, Zhang D, He Q, Li L. A hybrid-strategy-improved dragonfly algorithm for the parameter identification of an SDM. Sustainability. 2023;15(15):11791. doi:10.3390/su151511791. [Google Scholar] [CrossRef]
24. Balaji TS, Srinivasan S, Prasanna Bharathi S, Ramesh B. Fuzzy-based secure clustering with routing technique for VANETs. Comput Syst Sci Eng. 2022;43(1):291–304. doi:10.32604/csse.2022.023269. [Google Scholar] [CrossRef]
25. Sivaram P, Senthilkumar S. An efficient on the run in-vehicle diagnostic and remote diagnostics support system in VANET. Middle East J Sci Res. 2016;24(11):3542–53. doi:10.5829/idosi.mejsr.2016.3542.3553. [Google Scholar] [CrossRef]
26. Saremi S, Mirjalili S, Lewis A. Grasshopper optimisation algorithm: theory and application. Adv Eng Softw. 2017;105:30–47. doi:10.1016/j.advengsoft.2017.01.004. [Google Scholar] [CrossRef]
27. Gu X, Wu Q, Fan P, Cheng N, Chen W, Letaief KB. DRL-based federated self-supervised learning for task offloading and resource allocation in ISAC-enabled vehicle edge computing. Digit Commun Netw Forthcoming. 2024. doi:10.1016/j.dcan.2024.12.009. [Google Scholar] [CrossRef]
28. Zhang Z, Wu Q, Fan P, Cheng N, Chen W, Letaief KB. DRL-based optimization for AoI and energy consumption in C-V2X enabled IoV. IEEE Trans Green Commun Netw Forthcoming. 2025. doi:10.1109/TGCN.2025.3531902. [Google Scholar] [CrossRef]
29. Goudarzi S, Hassan WH, Anisi MH, Soleymani A, Sookhak M, Khan MK, et al. ABC-PSO for vertical handover in heterogeneous wireless networks. Neurocomputing. 2017;256(2):63–81. doi:10.1016/j.neucom.2016.08.136. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools