
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Optimized Deployment Method for Finite Access Points Based on Virtual Force Fusion Bat Algorithm
1 State Key Laboratory of Dynamic Testing Technology and School of Information and Communication Engineering, North University of China, Taiyuan, 030051, China
2 School of Information and Communication Engineering, North University of China, Taiyuan, 030051, China
3 Hunan Vanguard Group Co., Ltd., Changsha, 410137, China
* Corresponding Author: Jian Li. Email:
Computer Modeling in Engineering & Sciences 2025, 144(3), 3029-3051. https://doi.org/10.32604/cmes.2025.068644
Received 03 June 2025; Accepted 11 August 2025; Issue published 30 September 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In the deployment of wireless networks in two-dimensional outdoor campus spaces, aiming at the problem of efficient coverage of the monitoring area by limited number of access points (APs), this paper proposes a deployment method of multi-objective optimization with virtual force fusion bat algorithm (VFBA) using the classical four-node regular distribution as an entry point. The introduction of Lévy flight strategy for bat position updating helps to maintain the population diversity, reduce the premature maturity problem caused by population convergence, avoid the over aggregation of individuals in the local optimal region, and enhance the superiority in global search; the virtual force algorithm simulates the attraction and repulsion between individuals, which enables individual bats to precisely locate the optimal solution within the search space. At the same time, the fusion effect of virtual force prompts the bat individuals to move faster to the potential optimal solution. To validate the effectiveness of the fusion algorithm, the benchmark test function is selected for simulation testing. Finally, the simulation result verifies that the VFBA achieves superior coverage and effectively reduces node redundancy compared to the other three regular layout methods. The VFBA also shows better coverage results when compared to other optimization algorithms.Keywords
With the continuous development of sophisticated information technology, strategies such as Industry 4.0 and Made in China 2025 have been put forward one after another. As a critical infrastructure for intelligent manufacturing systems, the Industrial Internet aims to achieve comprehensive interconnection among all elements of production systems. Among various wireless technologies, WiFi stands out due to its significant advantages in mobility, flexibility, data transmission rates, and deployment costs (Industrial Internet is the crucial infrastructure of an intelligent manufacturing system, aiming to realize the interconnection of all elements of the production system. WiFi, as one of the widely used wireless technologies, has major advantages in terms of mobility, flexibility, data transmission rate and deployment cost). For a WiFi network, the spatial deployment location of the AP will directly affect the signal strength distribution. Therefore, the AP deployment problem is of great significance for the network performance optimization of WiFi.
In the wave of Industry 4.0 and education digital transformation, smart factories and smart campuses put forward stringent requirements for wireless network coverage. Intelligent factories with collaborative manufacturing and predictive maintenance of equipment, and campuses with large-scale online teaching and real-time interaction of knowledge resources all rely on stable network coverage as a digital base. However, the limited number of AP nodes has significant shortcomings in coverage. On the one hand, subject to the physical coverage radius constraints, traditional AP nodes deployment methods are difficult to meet the demand for full coverage of the signal of the factory workshop and campus buildings, which is prone to the formation of signal blind zones; on the other hand, in face of the factory equipment and the campus high density terminal access demand, the limited number of AP nodes is difficult to guarantee the density of coverage, which results in the lack of signal strength in some areas, the unstable connection of terminal equipment, and the decline in data transmission rate. Therefore, optimizing the coverage strategy of limited AP nodes and improving coverage range and intensity have become the core propositions for guaranteeing the network quality in the intelligent field, which is of great significance for promoting the digital transformation of industries and the modernization process of education.
The deployment of nodes belongs to an NP-hard problem, which is essentially a nonlinear, multi-objective, multi-constraint optimization problem. There are three optimization algorithms for node deployment, one is the deployment optimization grounded in the virtual force algorithm [1], the second is the deployment relying on a geometric graph [2]. Additionally, the third category is the optimization using meta-heuristic algorithms [3], such as the multi-group dragonfly algorithm [4], whale algorithm [5], grey wolf algorithm [6] that have become common methods in multi-objective solving problems.
To enhance the coverage capacity with a finite number of wireless AP nodes while conserving energy and minimizing coverage redundancy, this paper presents a virtual force fusion bat algorithm. The factors affecting the performance of AP nodes, such as coverage, coverage efficiency, and energy consumption, are combined and optimized to establish a joint optimization decision formula to select the best node deployment location.
As wireless network rapidly advances, the rational deployment of wireless AP has become a key issue to ensure network performance and enhance user experience. AP deployment not only affects signal strength, network coverage, but also closely related to energy efficiency, cost control and other aspects. Many scholars have conducted research in this area and proposed a series of innovative strategies and methods.
Kong et al. [7] proposed to optimize the AP location and transmit power with multi-objective particle swarm algorithm, and combined with greedy algorithm to eliminate redundant APs, so that the transmit power of the AP can be reduced and energy efficiency can be improved. Chen et al. [8] proposed a save energy deployment method for AP relyed on the improved golden jackal, on premise of ensuring effective coverage, energy consumption is reduced by optimizing the position, status and transmission power of the AP. Liu et al. [9] proposed particle swarm-Lévy-double subgroup fruit fly algorithm to solve the problem of energy and efficient AP deployment for WLANs in a three dimensional environment, but did not further explore the possibility of minimizing the number of APs. Yang et al. [10] proposed the fine-grained strategy for AP deployment, that significantly improves the coverage efficiency and flexibility through ray tracing modeling and iterative fruit fly optimization algorithm. Marinho et al. [11] effectively promoted the AP coverage extension problem under high frequency communication by combining intelligent routing with AI techniques. Kumar et al. [12] proposed a bit error rate (BER) based multi-sector switching beam antenna synthesis schemez aimed at improving reliable communication coverage and system capacity of APs. But hardware complexity is high. Vijayaraghavan et al. [13] proposed the PlaciFi infrastructure, systematic optimization of the 3D spatial location of APs, through accurate planning layout of the APs, and ultimately achieve synergistic optimization of network capability and cost. Dao and Nguyen [14] focused on the whale algorithm, drawing on the logic of siege behavior, and combined chaotic initialization technology, but parameters adjustment there are still optimization space. Qi et al. [15] used rectangular layout and mathematically calculated the minimum number of nodes required to achieve full coverage of the monitored area, reducing the network energy consumption. Zheng et al. [16] proposed a square layout strategy in wireless networks. The strategy aimed to address the coverage problem of the monitoring area, leveraging distance calculations between nodes. However, scholars did not conduct a comparison across multiple deployment strategy types, which constituted a critical gap. Yang et al. [17] optimized distribution of node to improve detection rate under limited node conditions. It concluded that the diamond deployment strategy outperforms random deployment in detection rate, but lacks a discussion on the optimization mechanism of energy consumption.
The virtual force algorithm (VFA), as the most effective algorithm for node deployment, has been studied by many scholars. Zhang et al. [18] aimed at the problems of insufficient number of drones and unpredictable user movement during the deployment of Unmanned Aerial Vehicle (UAV) station, the arrangement of communication nodes can be dynamically optimized by using the virtual force model. Wang and Guo [19] improved the parameters of the virtual force to realize the adaptive division of the water monitoring area, which effectively improves the coverage quality in sparse node scenarios. Li et al. [20] proposed the algorithm of extending virtual force, which effectively improves the network deployment performance under different communication range to sensing range ratios by designing the force model in separate scenarios.
Li et al. [21] proposed a mongoose algorithm to settle the deployment optimization of network nodes with consideration of data fusion techniques and environmental randomness. Yao et al. [22] on a basis of ant lion optimization algorithm oriented toward virtual force, Yao et al. [23] based on the improvement of the moth flame search algorithm to solve the node coverage problem, while did not consider the redundancy of nodes. Mohar et al. [24] mixed fruit fly olfaction and bat echoes for optimizing node deployment to improve the coverage, but the computation time is long. Muhammad et al. [25] introduced an adaptive search factor into the velocity update formula of the Particle Swarm Optimization (PSO) algorithm, this allows particles to dynamically adjust both the magnitude and direction of velocity update during the search process. However, there is still a trap of falling into the local optimum. Sun et al. [26] proposed genetic algorithm (GA) fused with whale optimization algorithm (WOA), and solved the coverage redundancy problem in wireless sensor networks due to the random deployment of nodes. But cross-variation introduces more parameters, making parameter tuning difficult. Zhao et al. [27] transformed the node deployment problem into a mixed integer linear problem, and applied the simulated annealing (SA) algorithm to solve the problem, but the convergence speed is slow. Liu et al. [28] used the trapping mechanism of the Gray Wolf optimization algorithm (GWO) to assign pilot to ensure coverage of users while minimizing signal interference during node deployment. Saranya and Karthik [29] combined the mayfly and ant colony algorithm to solve the energy consumption problem of nodes in wireless sensor networks.
The main contributions of this study are as follows:
(1) Joint coverage, node redundancy and node movement distance multi-factor objective function is established, and the weighting idea is used to assign weights to each factor to attain synergistic enhancement and balanced optimization of comprehensive network performance.
(2) The Lévy flight is embedded in the global search framework of the bat algorithm to enhance its cross-scale exploration capacity, while the virtual force algorithm is introduced in the local fine-tuning part to construct a dynamic force model, to attain the efficient optimization of the spatial layout of the AP nodes and guarantee the performance through the organic coupling of the global-local optimization process and the synergy of the strategies.
(3) The quantitative performance evaluation of the algorithm proposed in this paper is carried out by using the test function, comparing the final results of regular deployment with the deployment effect of this algorithm in multiple indexes, and analyzing the results of simulation experiments in a systematic way.
The rest of the paper is as follows: Section 2 analyzes the current state of research on the AP node deployment problem. Section 3 describes the AP model and objective function. Section 4 analyzes the fusion algorithm. Section 5 analyzes the proposed algorithm through simulation experiments. Section 6 makes conclusions.
Today, the field of wireless communications is undergoing rapid changes, gradually replacing wired communications, making industrial centralized control a reality. However, for the commonly used wireless communication technologies, Bluetooth technology has a short transmission distance and few connectable devices; Zigbee technology has a low transmission rate; and Wi-Fi is a high-speed WLAN designed based on the IEEE 802.11 standard. The structure of the WLAN system is shown in Fig. 1 and consists of four parts, including the personal computer (PC), gateway (GW), access points (APs) and sensors, and each sensor device can be connected to one or more access devices to ensure reliable data transmission. The PC sits at the top of the entire system and is used to set up and monitor the entire network as well as manage data. As a key node of network connection, GW performs network layer protocol conversion to realize seamless data forwarding between networks with different communication protocols, ensuring smooth data interaction and compatibility between heterogeneous networks. The access device receives data from the sensors by means of a wireless link and forwards the data to the gateway by means of a wired link, which is connected to the host computer via a fieldbus.
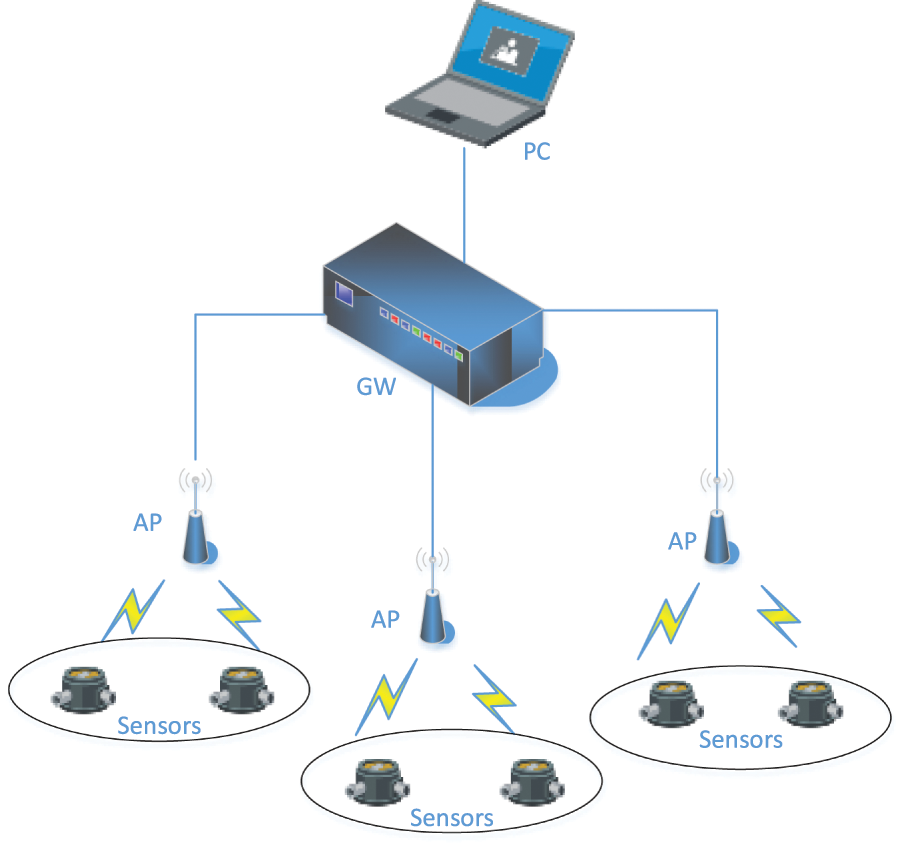
Figure 1: Network model
The perception model of the AP is shown in Fig. 2. Where
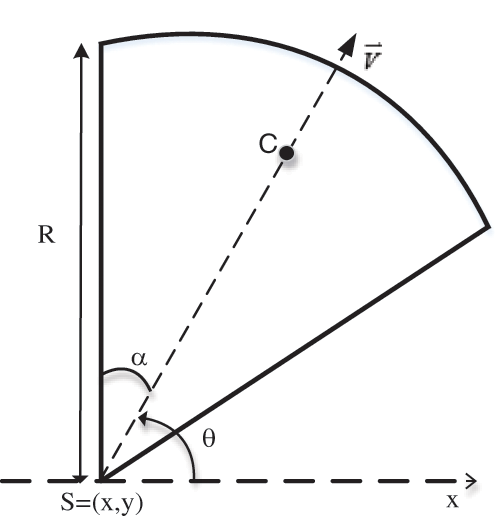
Figure 2: Perception model
With the adoption of the Boolean perception model, the constraint conditions for point
where
It is possible for multiple nodes to sense an arbitrary grid point. Consequently, the probability that a set of nodes collectively senses a grid point can be expressed by Eq. (2).
The coverage quality evaluation in this paper includes three indicators.
(1) Coverage
(2) Coverage efficiency
(3) Total moving distance
where
The objective function adopts the concept of weights and is formulated as Eq. (6).
where
In this section, the basic bat algorithm and the virtual force algorithm are introduced, to optimize the wireless network coverage, the Lévy flight strategy and the virtual force are used as the perturbation factors for the bat global position and local position updating, and the fused algorithm improves the convergence speed and optimization seeking ability.
4.1.1 Traditional Bat Algorithm
The Bat Algorithm (BA), a prominent meta-heuristic optimization, derives its inspiration from the echolocation mechanisms exhibited by bats in nature. Individual bat searches by adjusting its frequency, speed and position, while the loudness and pulse frequency change dynamically with iterations. At the beginning of the search, bats have a large loudness and a small pulse frequency, which allows the algorithm to search globally over a large solution space to explore potentially optimal solution regions; as the iteration progresses, the loudness decreases, the pulse frequency increases, and the algorithm focuses on localized regions to perform a fine search. This mechanism ensures that the bat algorithm does not search blindly, but progressively advances in the direction of a more optimal solution. Compared with PSO [27], GAWOA [28] and SA [29], the bat algorithm is less prone to local optimum traps, has concise parameters, and converges quickly. The bat schematic diagram is shown in Fig. 3. The bat algorithm position, frequency update and velocity update equations are as in Eqs. (7)–(9).
where
where
Figure 3: Bat schematic diagram
The loudness and pulse frequency update equations are as in Eqs. (11) and (12).
where
Since the local movement direction of the bat depends on the random number
Every node experiences repulsive forces from other nodes in its neighborhood, while coverage blind region where the perception points around itself are located acts gravitationally on the node. All the nodes rotate under the joint action of repulsion as well as gravitational force, thus making the nodes adjust to the appropriate position, reducing the node redundancy coverage while reducing the coverage hole, maximizing the coverage of the entire region.
When the center of mass point
where
When the perception point
where
The combined force on the node center of mass point is the vector sum of the repulsive forc between the node and its neighbors and gravitational force on its own perception point, as shown in Eq. (15).
The combined force at the center of mass point of the nodes is shown in Fig. 4. There are four nodes in the figure, where
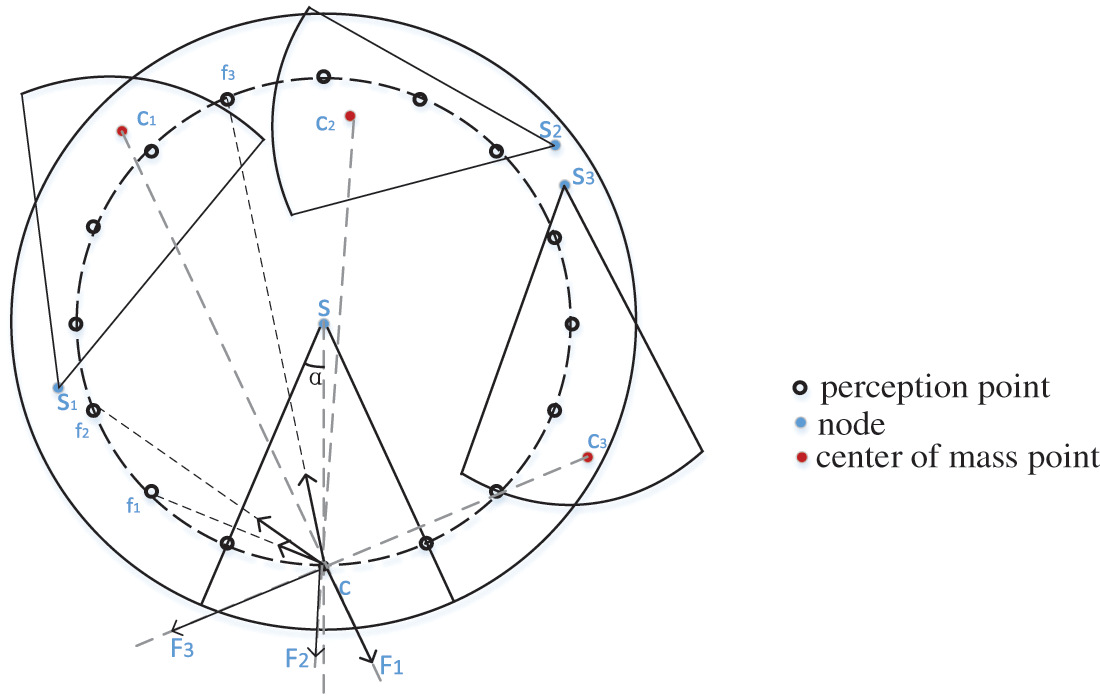
Figure 4: Combined force at the center of mass point
To boost the bat algorithm global optimization performance, the Lévy flight strategy [30] is adopted to modify the global position update mechanism for bat individuals, enhancing exploration efficiency. Lévy flight has a power-law step size distribution proprety, which can generate intermittent long-distance jumps and break the limitation of individual local search in the traditional bat algorithm. When updating position, the randomly generated step size and direction of Lévy flight are used to guide the bat to escape from the local traps, especially in the complex multimodal function optimization problems, and its advantages are more obvious. In calculating the search path of Lévy flight, the formula is given by Eq. (16).
where
where
To update the bat positions, the Lévy flight strategy is incorporated, and its update equation is given by Eq. (18).
where
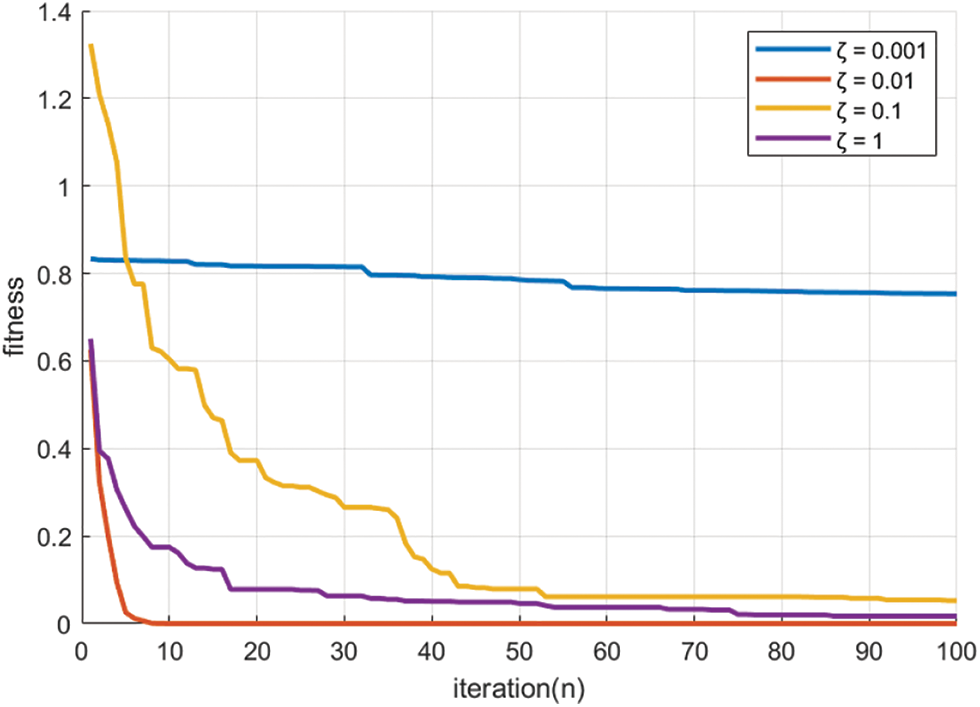
Figure 5: Scaling factor value
The flight trajectory is shown in Fig. 6. The randomness of the flight trajectory and its long step size enables the bat to make a larger range of jumps in the feasible domain. This helps the algorithm to escape from the local optimum and explore broader regions within the search space, thus increasing the possibility of finding the overall optimal solution.
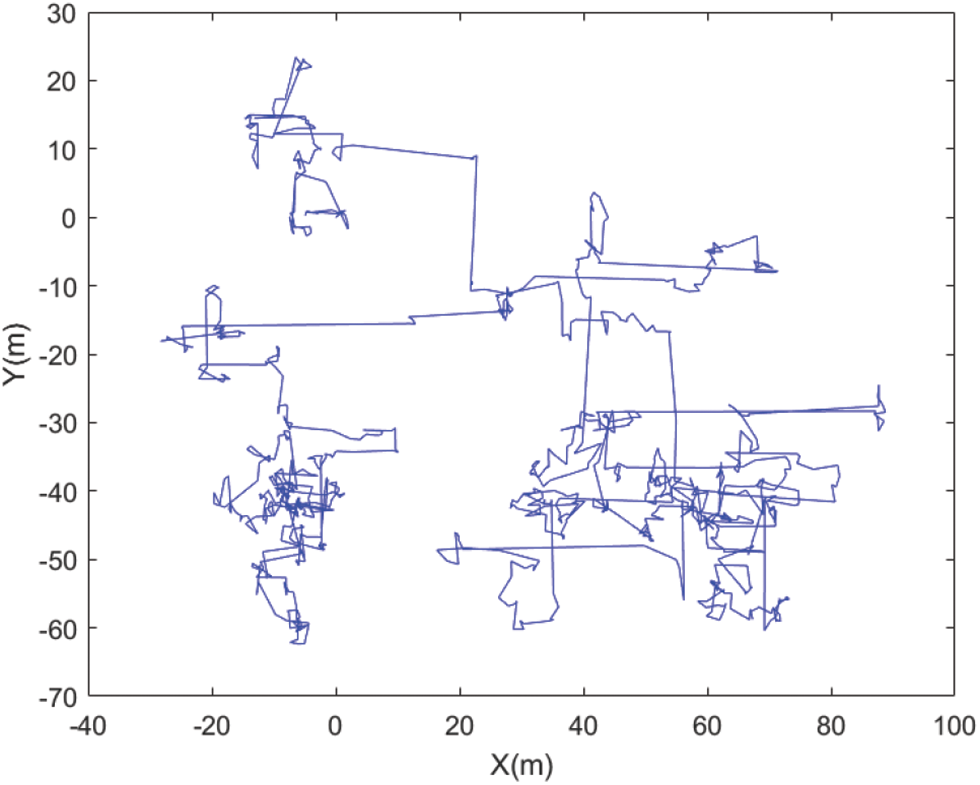
Figure 6: Lévy flight trajectory
4.2.2 Local Precision Optimization
Although the BA can achieve network coverage to a certain extent, there may be some uncovered areas, which are also known as coverage blind zones. The virtual force algorithm can fill the coverage holes by developing a simulation model for inter-node gravitational and repulsive forces, which steers the node to migrate into blind zones, thus making the network coverage more comprehensive and uniform. The bat position fusion virtual force is given by Eq. (19).
where
where
The decay curve of the iterative step size is shown in Fig. 7. The curve at the beginning of the iteration shows an almost linear downward trend, indicating that the mobile step size adaptive adjustment speed is faster, which is more consistent with the iterative mechanisms in swarm intelligence algorithm. Fixed step size cannot regulate the search phase, if the step size is too large in the later local optimization, the nodes sway sharply around the optimal solution, if the step size is too small will lead to very low efficiency in the early global search. At the beginning of the iteration, Maxstep is maintained at a relatively large value to ensure the global exploration ability and accelerate the convergence rate of algorithm; at the late iteration, it should decreases to refine local optimization precision and ensure solution quality.
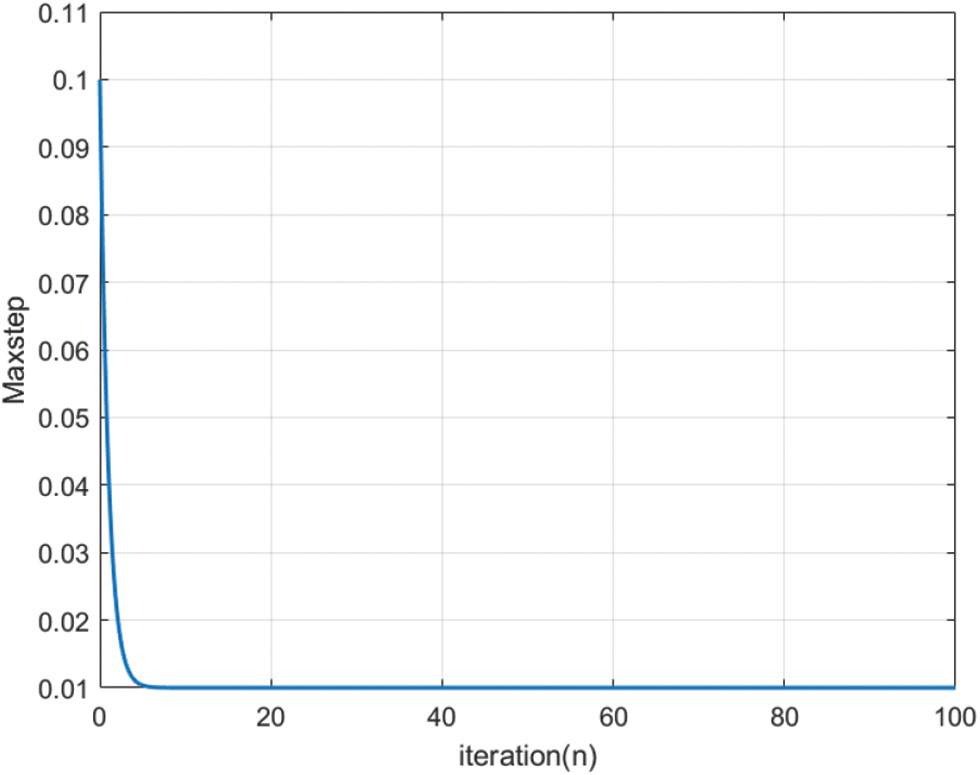
Figure 7: Dynamic step decay
The flowchart of the VFBA is shown in Fig. 8.
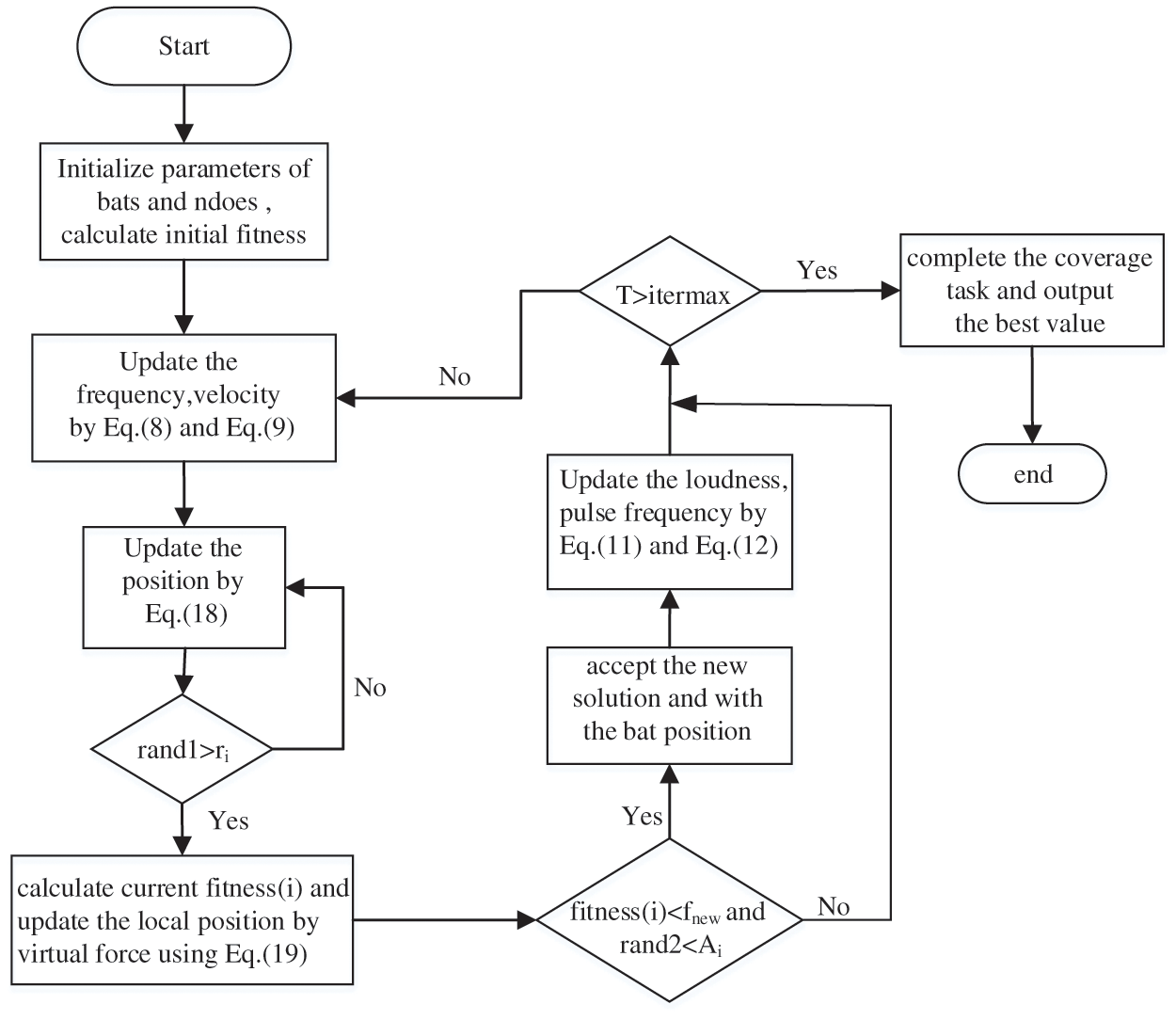
Figure 8: Flowchart of VFBA
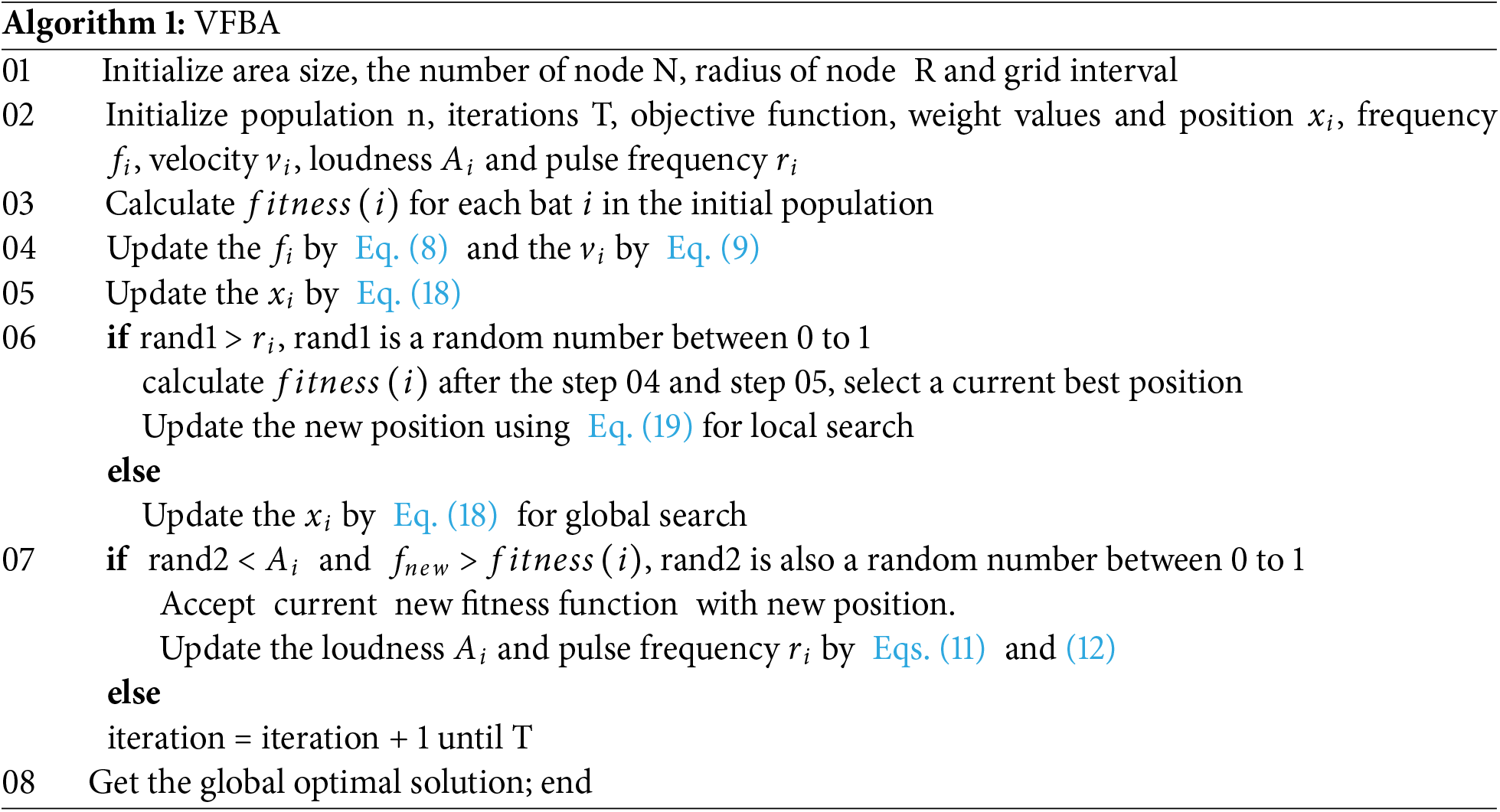
The VFBA pseudocode is shown in the Algorithm 1.
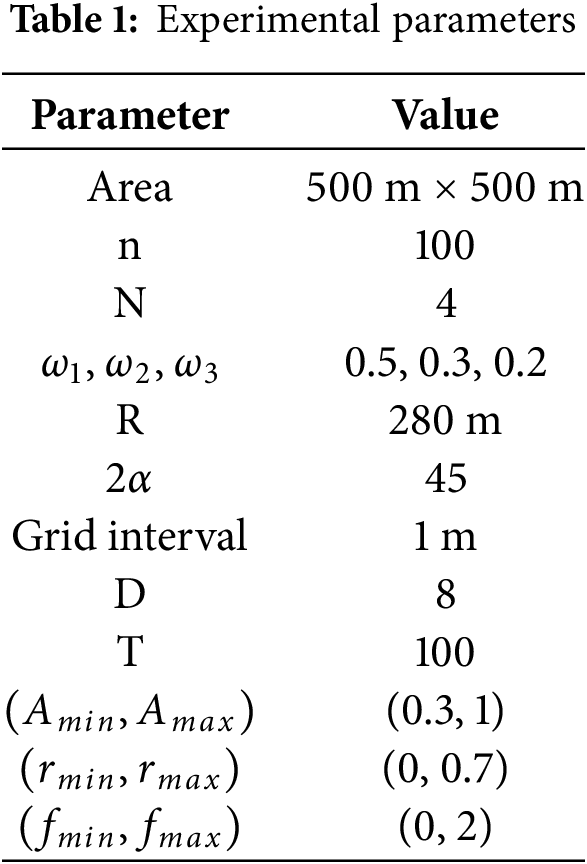
Aiming to validate the solution applicability of the virtual force fusion bat optimization algorithm for the coverage problem, the simulation uses an Intel Core i5-13500H processor (12 cores, 16 threads, 1.45 GHz) and 16 GB of RAM, the environment is MATLAB 2021b. Since the number of nodes N for virtual force computation is fixed and smaller than the population size n, the time and space complexity of the algorithm is determined by the population size n, the number of iterations T, and the problem dimension D, and is of the same order of magnitude as the complexity of the standard bat algorithm, which is O (T × n × D) in time complexity and O (n × D) in space complexity. The experimental parameters are tabulated in Table 1.
5.1 Benchmark Test Function Simulation
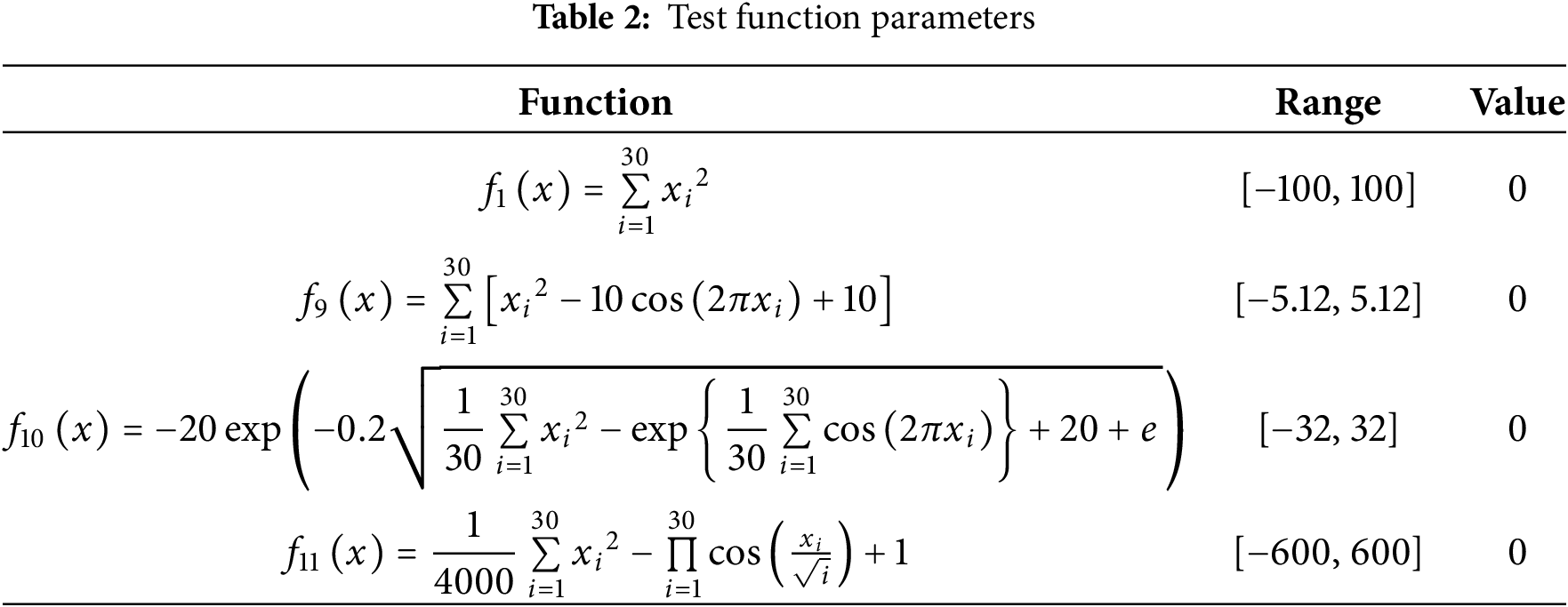
To assess the effectiveness of the VFBA, four benchmark functions are selected to test the simulation result. The configurations of the benchmark functions are tabulated in Table 2.
Comparison of the convergence curves of VFBA with the VFA and the BA are shown in Fig. 9. Which shows the VFBA has a better ability to find the optimum of the extremum of the four benchmark functions than VFA and BA, there is only one extremum of the single-peaked function Sphere, thus the convergence rate is fast. For the multi-peak function, owing to the presense of multiple local optimal solutions, the VFBA algorithm is slower to converge than the single-peak function and requires more iterations to find the global optimal solution, thus proving the feasibility and superiority of the VFBA in solving optimization problems.
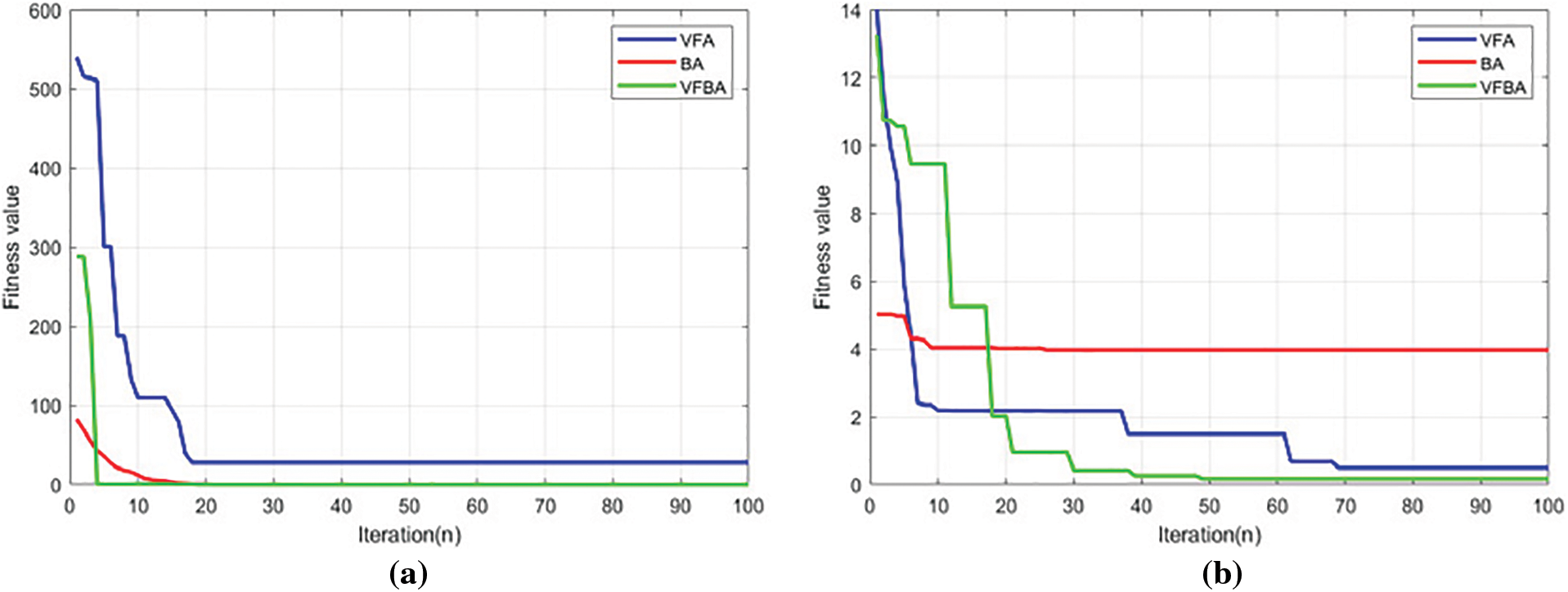
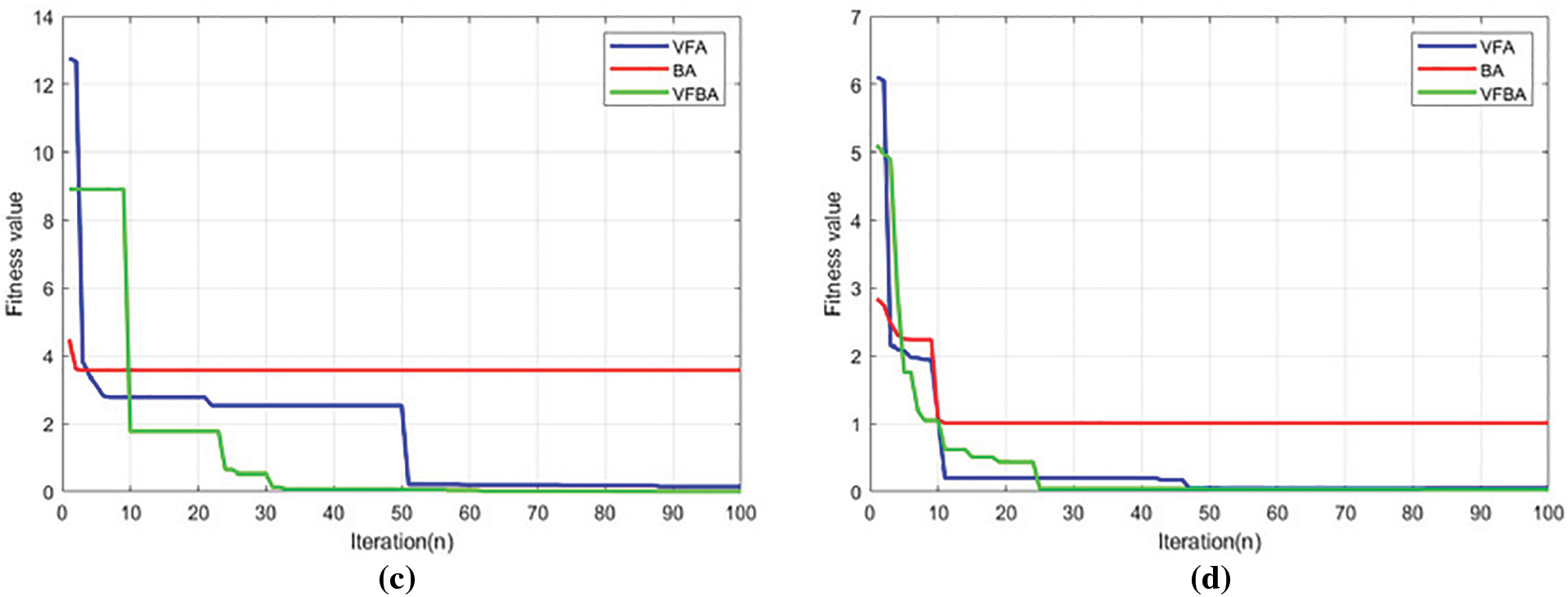
Figure 9: (a) Iteration of Sphere; (b) Iteration of Rastrigin; (c) Iteration of Ackley; (d) Iteration of Griewank
5.2 AP Node Coverage Simulation
5.2.1 Coverage Analysis in Monitoring Area
A right-angle coordinate system is established with the area to be monitored as the target, in which the positive x-direction is eastward, and the positive y-direction is northward. The measurement range is 500 m × 500 m, and taking three typical four-node rule layouts as an example, the APs are laid in the area according to the positions shown in Fig. 10. In the square layout, four APs (labeled A, B, C, and D) are located at the four corners of the monitoring area. The diamond layout places the APs on the vertical and horizontal centerlines of the monitoring area boundaries. The rectangular layout places the four APs on the upper and lower boundaries in three equal parts.
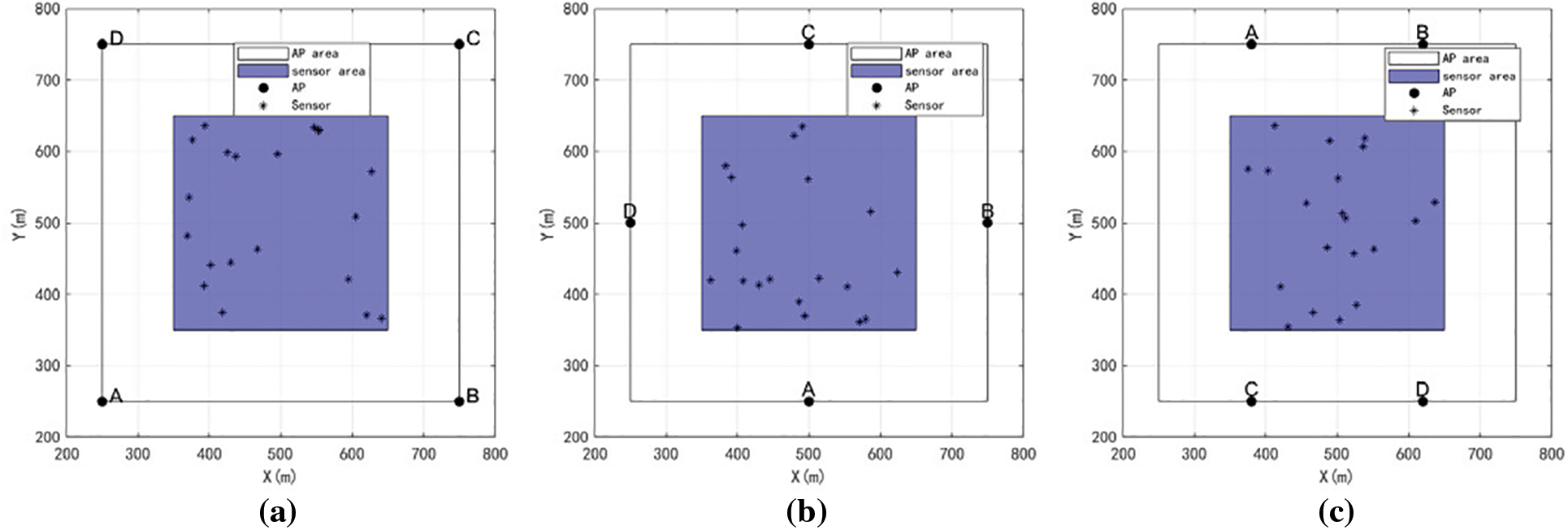
Figure 10: (a) Square layout; (b) Diamond layout; (c) Rectangular layout
The final coverage visualization results are shown in Fig. 11. Compared with rectangular layout [15], square layout [16] and diamond layout [17], due to these three methods of layout are based on simple geometric shapes for node layout, and these layout methods can only achieve locally better coverage, the coverage map of the three rules of layout has a larger coverage blind zone. In contrast, the algorithm in this paper adds Lévy flight to the bat position update, and further incorporates virtual force for optimization, resulting in a more uniform layout, smaller coverage blind zone, and a significant increase in the coverage rate.
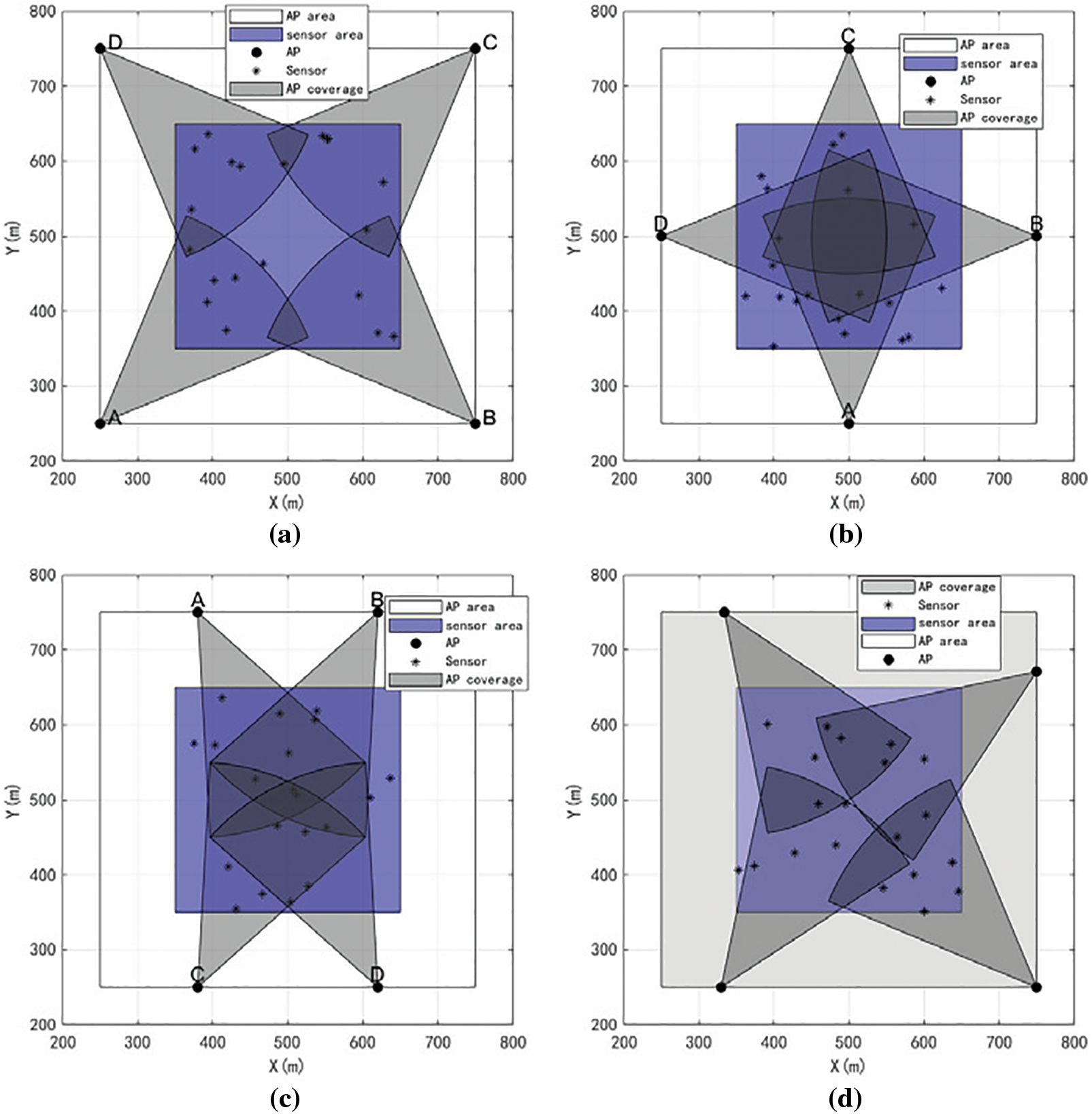
Figure 11: (a) Coverage of square layout; (b) Coverage of diamond layout; (c) Coverage of rectangular layout; (d) Coverage of VFBA algorithm
To validate the discrepancy in coverage performance between our algorithm and the conventional node layout method, the convergence curves are as shown in Fig. 12, the VFBA achieves 41.06% coverage at an early stage and has the fastest convergence speed. With the iterations increasing, the coverage effect is gradually close to the optimum under the fusion algorithm. Upon reaching 40 iterations, the algorithm has stabilized and achieves an optimal coverage of 91.99%. Diamond layout starts with a coverage of 30%, which grows slowly throughout the process, and later in the iteration the coverage is only 59%, which is a limited increase in coverage. The coverage of square layout is 84.75% and the coverage of rectangular layout is 73.64%. The VFBA has the highest coverage relative to other methods.
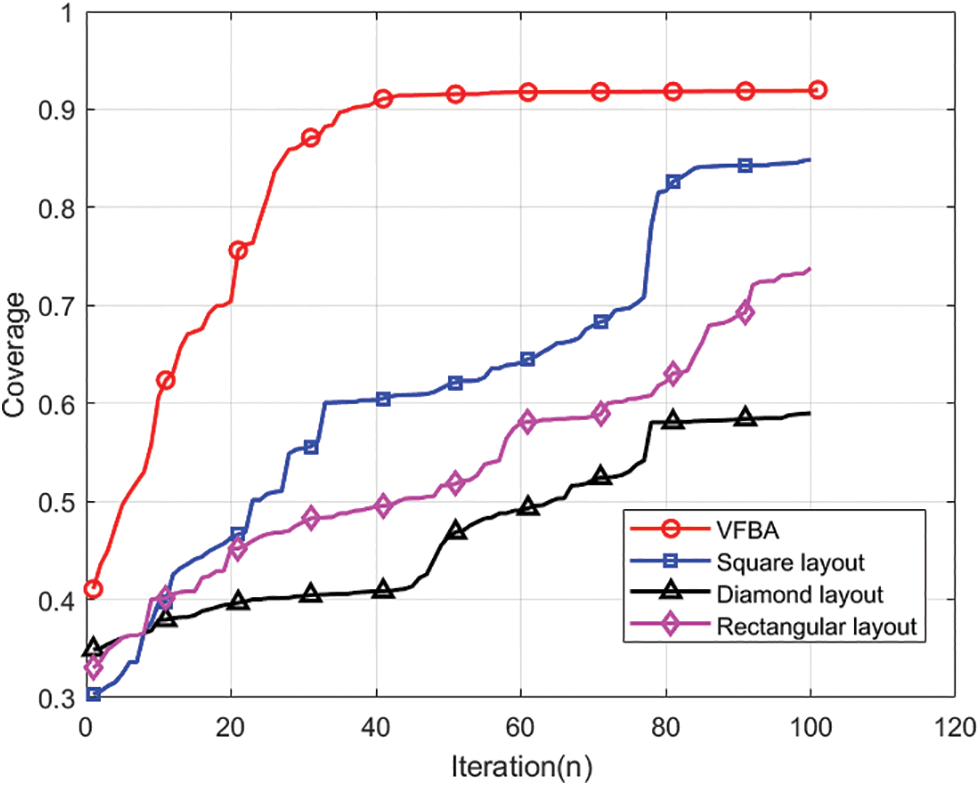
Figure 12: Coverage comparison
The node movement trajectory is shown in Fig. 13. The red dots represent the initial node positions determined by applying the bat algorithm, the initially deployed nodes may have coverage blind zones or coverage overlap is too high, bat algorithm is affected by its own search mechanism and parameter settings and other factors, it is difficult to eliminate these problems, the final node position is determined by the position of the end of the colored dotted line.
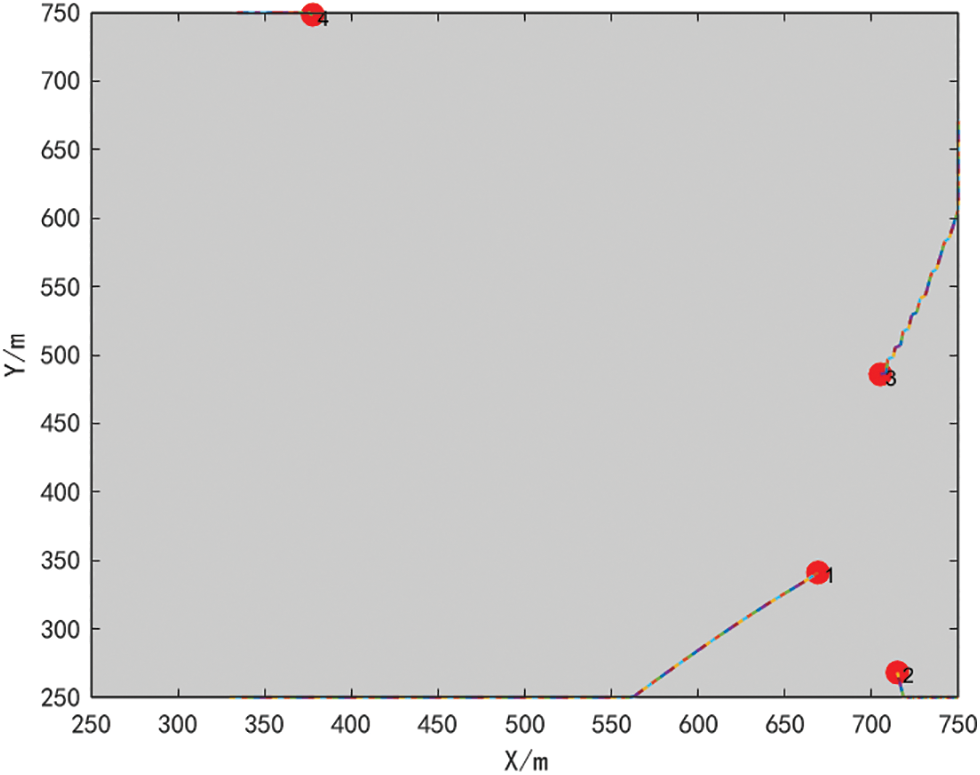
Figure 13: Node movement trajectory
To remove the errors due to randomness, every result underwent 30 runs for analysis under identical conditions, as shown in Table 3.
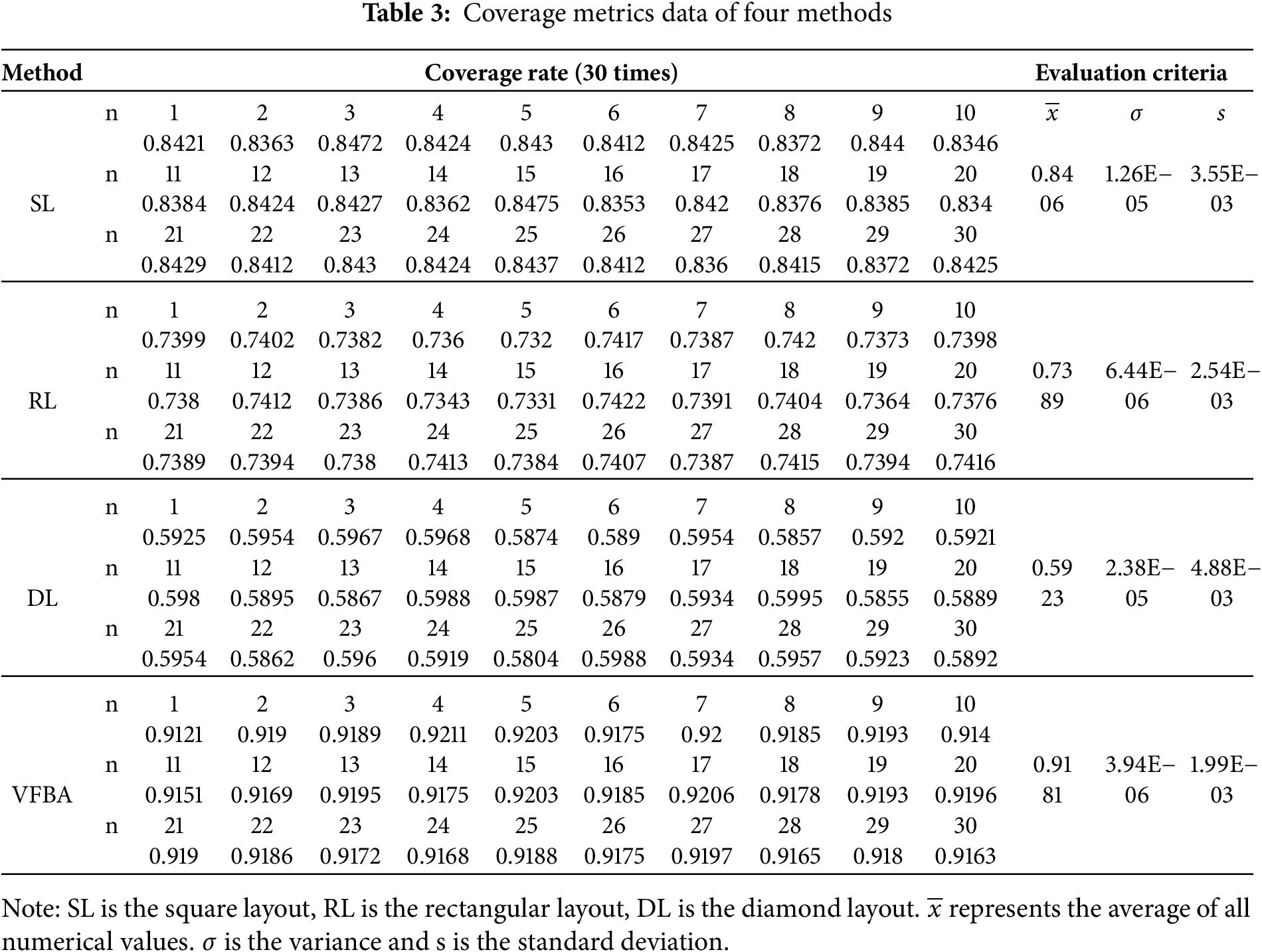
The table proves the average coverage of VFBA algorithm is 91.81% under the same conditions, which improved by 7.75% compared with the square layout method; by 32.6% compared with the diamond layout; and by 17.9% compared with the rectangular layout method. The variance and standard deviation of the algorithm in this paper are minimal compared to other layout methods, which proves that the VFBA is more stable. These prove that the VFBA significantly surpasses other methods in coverage performance.
The simulation results of coverage efficiency of nodes under the four methods are shown in Fig. 14. The coverage efficiency attained by VFBA reaches a high level at a low number of iterations and stabilizes at 88.46% as the iterations proceed. This indicates that when using the VFBA, the nodes can be distributed quickly and efficiently to achieve a large coverage area, and effectively reducing the coverage redundancy. The square layout has a low coverage efficiency at the beginning, it improves significantly in the later stages, and the coverage efficiency eventually reaches 91.67%, but the convergence speed is slightly slower compared to VFBA. The overall improvement ability of the diamond and rectangular layout is weaker, especially the diamond layout, under the same number of iterations, the coverage efficiency is much lower than VFBA and square layout, and the rectangular layout is the second.
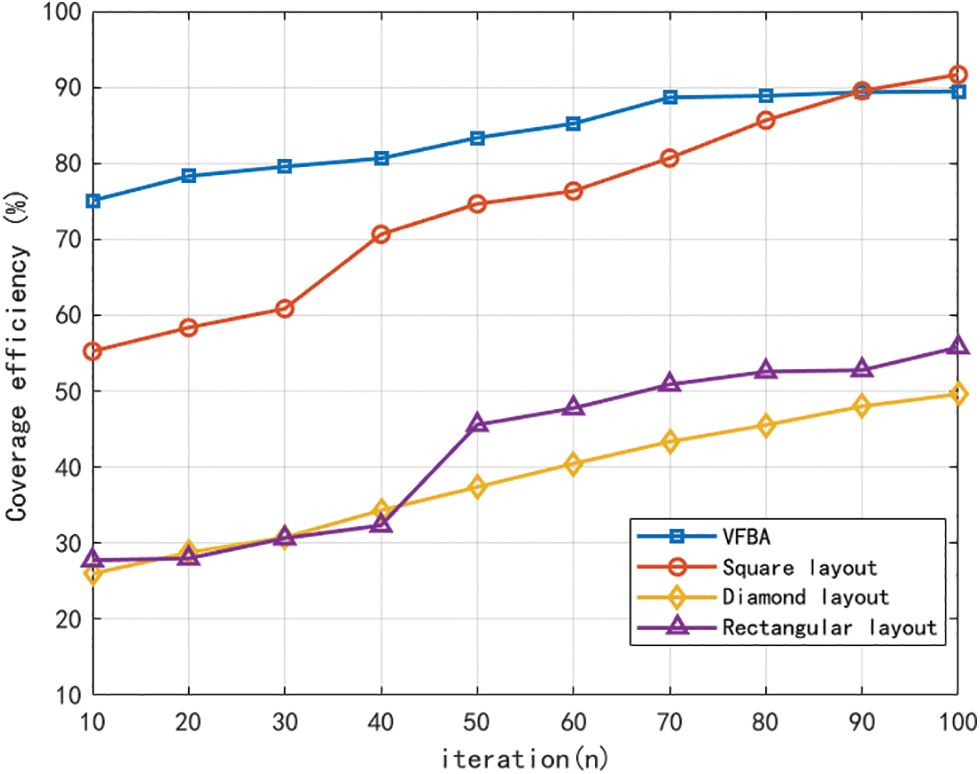
Figure 14: Coverage efficiency comparison
Since the radio signal propagation attenuation can be calculated using the free space model in the environment without obstacles in the campus outfield, the path loss from each location in the region to the signal source is shown in Fig. 15. The high signal strength area of VFBA is widely distributed and has the largest coverage, the high signal area of the diamond and rectangular layout is concentrated and unevenly distributed, and the signal attenuation in the center area of the square layout is serious and not conducive to stable communication. The feasibility of VFBA is proved by comparison.
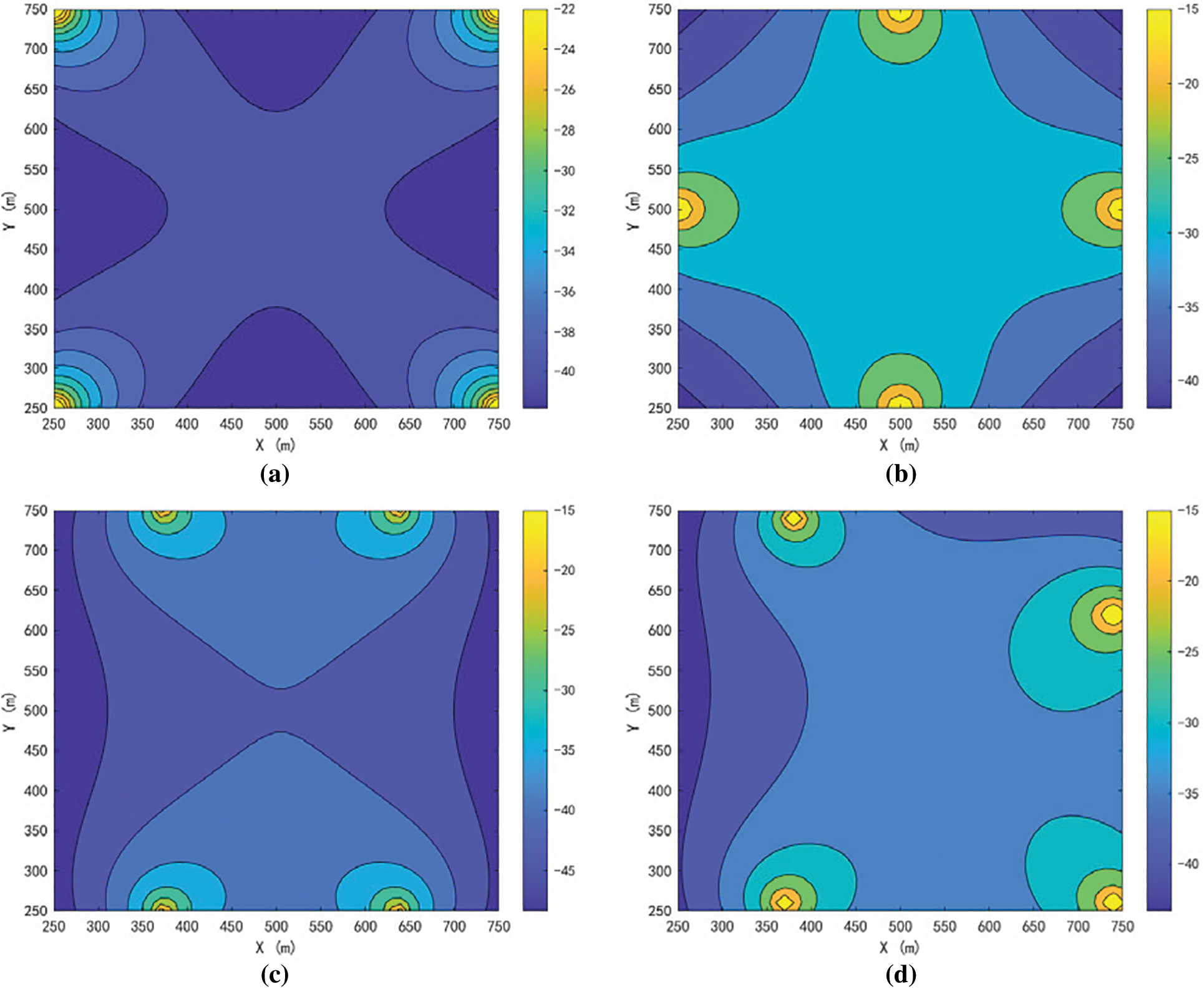
Figure 15: (a) Path loss of square layout; (b) Path loss of diamond layout; (c) Path loss of rectangular layout; (d) Path loss of VFBA algorithm
Across the four methods, the movement distance of every node is shown in Fig. 16a. The movement distance of the four nodes of VFBA, square, diamond and rectangular layout are shown from right to left. The maximum moving distance of a node of VFBA is 321.4 m, the maximum moving distance of a node of square, diamond and rectangular layout is 455.78, 494.25 and 511.08 m, respectively. In comparison with the other methods, the VFBA demonstrates a reduction in moving distance. And the total distance traveled by all nodes of the four methods is shown in Fig. 16b. The total movement distance using the VFBA is 930.26 m, which is the least movement distance among all methods. It shows that the VFBA is more efficient in resource utilization, reducing unnecessary mobile consumption and improving overall layout efficiency.
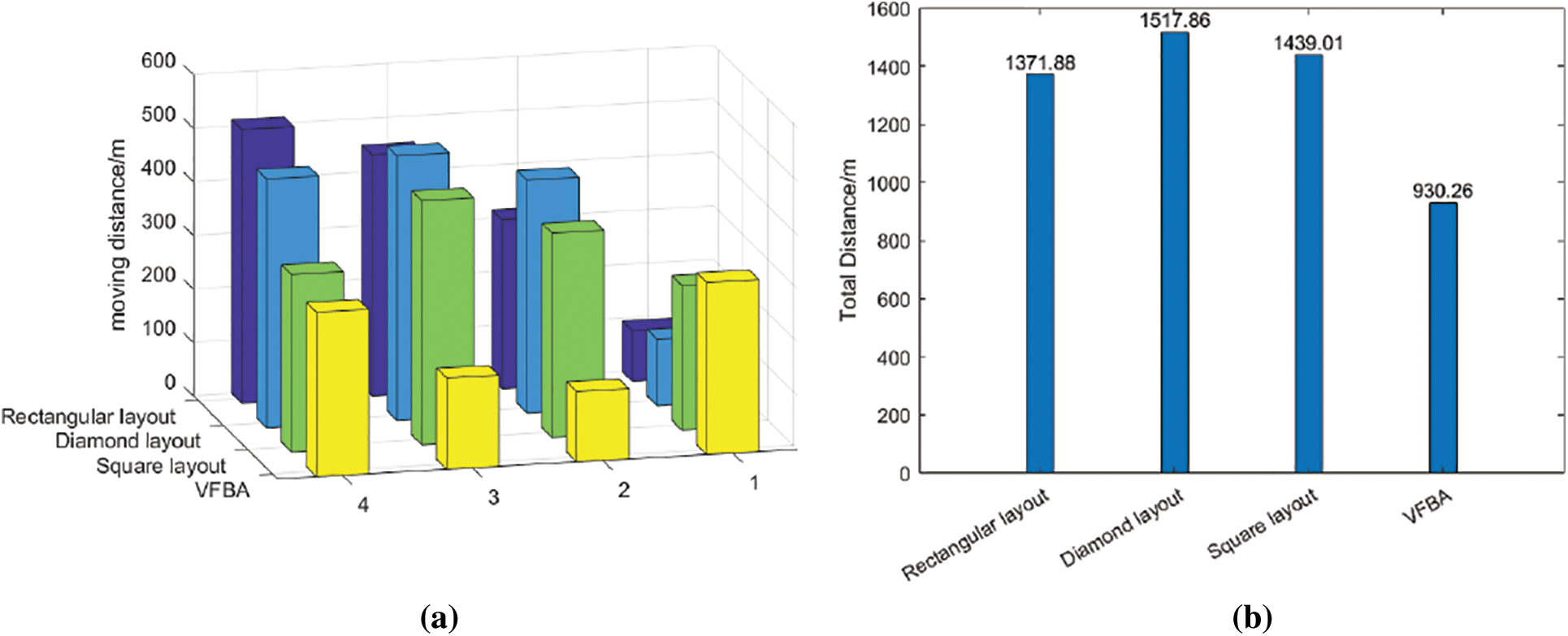
Figure 16: (a) Single node movement distance; (b) Total nodes movement distance
To validate the coverage applicability of VFBA in large areas, two groups of extended simulation experiments are designed, and the coverage curves are shown in Fig. 17. One group is carried out in an area of 1000 m × 1000 m, the radius of the nodes is set to 600m; the other group expands the area to 1500 m × 1500 m and adjusts the radius of the nodes to 800 m. Except for the two parameters of area and radius of the nodes in these two groups of experiments, the other parameters are unchanged as in the previous basic experiments to ensure the comparability of the experiments. For two larger regional deployments, the VFBA has a higher coverage than the other three layout methods. In a 1000 m × 1000 m monitoring area, VFBA achieves a final coverage of 85.92%, while square, diamond, and rectangular layouts have coverage of 80.55%, 58.6%, and 68.17%, respectively.
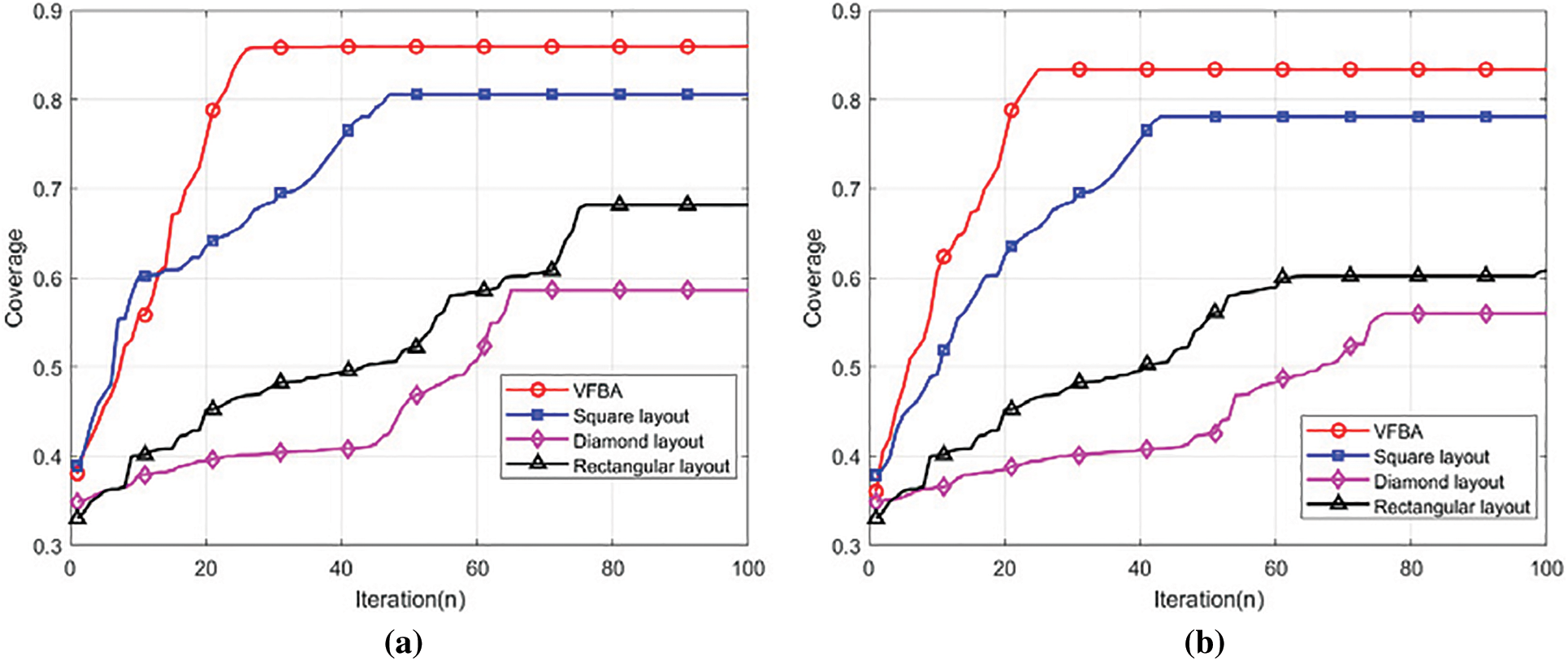
Figure 17: (a) Coverage of 1000 m × 1000 m; (b) Coverage of 1500 m × 1500 m
5.2.2 Coverage Analysis in Different Algorithms
Comparison of the coverage of different algorithms in the iterative optimization process is shown in Fig. 18. The node coverage of VFBA is 91.9%, GAWOA is next with a coverage value of 85%, SA has a coverage of 71.1%, and PSO has the worst coverage of 68.1%. VFBA is able to quickly approach the optimal solution at start and converge to the optimal solution quickly. Although PSO converges faster, in terms of node coverage, PSO falls into the optimum value at the later stage and it is difficult to jump out. Compared with VFBA, the final network coverage obtained by GAWOA is lower and the convergence speed is slower. Taken together, VFBA outperforms other algorithms in the node coverage optimization problem.
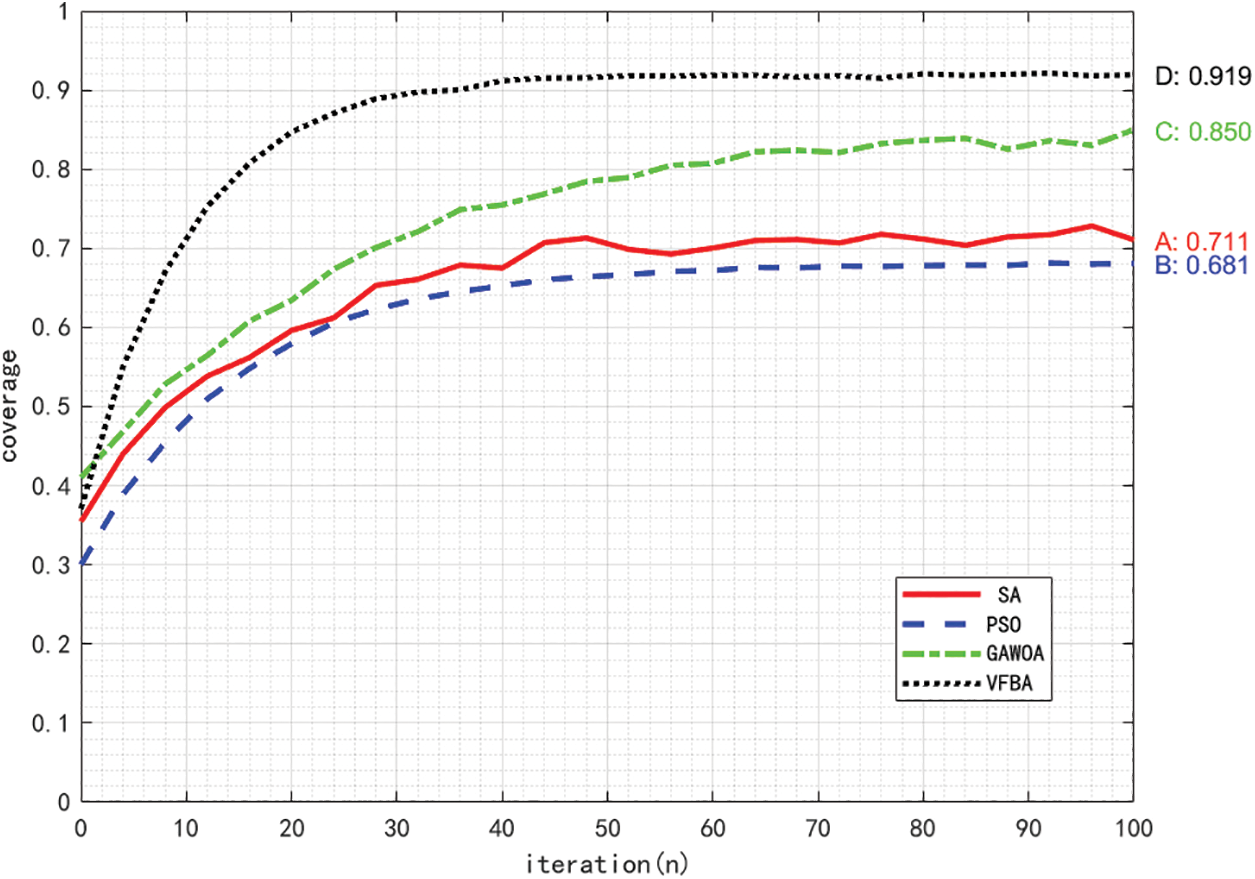
Figure 18: Coverage of different algorithms
In this paper, we study the key technology of wireless coverage enhancement for a finite number of AP nodes and propose a virtual force fusion bat algorithm. For the purpose of raising the coverage effect, the Lévy flight strategy is incorporated, and the position update mechanism of the bat is improved so that the individuals can make long-distance jumps with a large probability in each iteration to promote the ability of global search. At post-algorithmic to enhance the bat search accuracy, virtual force is combined with the feature that the traveling step size decreases gradually with the number of iterations, and the virtual force is introduced as a disturbance factor in the position update process of bats as a way to improve the accuracy of the local search. The results indicate that when compared to diamond, rectangular, and square layout methods, VFBA substantially promotes the coverage and coverage efficiency of AP nodes. The VFBA makes the nodes well distributed and reduces energy consumption. In addition, the coverage of VFBA is also significantly improved compared to SA, PSO, and GAWOA. However, this study is limited to the deployment of AP in 2-D space, after which a more realistic monitoring environment will be simulated to extend the deployment optimization to 3-D space.
Acknowledgement: The authors thank all funding agencies for their support of this work, as well as teachers and students for their help.
Funding Statement: This work is supported in part by the National Natural Science Foundation of China under Grant No. 62271453, in part by the National Natural Science Foundation of China No. 62101512, in part by the Central Support for Local Projects under Grant No. YDZJSX2024D031, in part by Project supported by the Shanxi Provincial Foundation for Leaders of Disciplines in Science, China under Grant No. 2024Q022, and in part by Shanxi Province Patent Conversion Special Plan Funding Projects under Grant No. 202405004.
Author Contributions: Conceptualization, Jian Li, Qing Zhang, Tong Yang, Yu’an Chen and Yongzhong Zhan; methodology, Jian Li, Qing Zhang, Tong Yang and Yu’an Chen; investigation, Jian Li, Qing Zhang and Tong Yang; writing, Jian Li and Qing Zhang. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The original data that support the findings of this study are available from the corresponding author, Jian Li, upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Liu S, Zhang R, Shi Y. Design of coverage algorithm for mobile sensor networks based on virtual molecular force. Comput Commun. 2020;150(3):269–77. doi:10.1016/j.comcom.2019.11.001. [Google Scholar] [CrossRef]
2. Karimi-Bidhendi S, Guo J, Jafarkhani H. Energy-efficient node deployment in heterogeneous two-tier wireless sensor networks with limited communication range. IEEE Trans Wirel Commun. 2021;20(1):40–55. doi:10.1109/TWC.2020.3023065. [Google Scholar] [CrossRef]
3. Nematzadeh S, Torkamanian-Afshar M, Seyyedabbasi A, Kiani F. Maximizing coverage and maintaining connectivity in WSN and decentralized IoT: an efficient metaheuristic-based method for environment-aware node deployment. Neural Comput Appl. 2023;35(1):611–41. doi:10.1007/s00521-022-07786-1. [Google Scholar] [CrossRef]
4. Wang X, Chu SC, Chao HC, Pan JS. A multi-group dragonfly algorithm for application in wireless sensor network deployment problem. Int J Ad Hoc Ubiquitous Comput. 2021;37(4):227. doi:10.1504/ijahuc.2021.10040654. [Google Scholar] [CrossRef]
5. Zulfiqar R, Javed T, Anwar Ali Z, Alkhammash EH, Hadjouni M. Selection of metaheuristic algorithm to design wireless sensor network. Intell Autom Soft Comput. 2023;37(1):985–1000. doi:10.32604/iasc.2023.037248. [Google Scholar] [CrossRef]
6. Seyyedabbasi A, Kiani F, Allahviranloo T, Fernandez-Gamiz U, Noeiaghdam S. Optimal data transmission and pathfinding for WSN and decentralized IoT systems using I-GWO and Ex-GWO algorithms. Alex Eng J. 2023;63(12):339–57. doi:10.1016/j.aej.2022.08.009. [Google Scholar] [CrossRef]
7. Kong Z, Wu D, Jin X, Cen S, Dong F. Improved AP deployment optimization scheme based on multi-objective particle swarm optimization algorithm. KSII Trans Internet Inf Syst. 2021;15(4):1568–89. doi:10.3837/tiis.2021.04.021. [Google Scholar] [CrossRef]
8. Chen L, Xu F, Jin K, Tang Z. Energy-saving access point configurations in WLANs: a swarm intelligent approach. J Supercomput. 2023;79(17):19332–64. doi:10.1007/s11227-023-05402-0. [Google Scholar] [CrossRef]
9. Liu P, Hu Q, Jin K, Yu G, Tang Z. Toward the energy-saving optimization of WLAN deployment in real 3-D environment: a hybrid swarm intelligent method. IEEE Syst J. 2022;16(2):2425–36. doi:10.1109/JSYST.2021.3065434. [Google Scholar] [CrossRef]
10. Yang Y, Zhou A, Ma H. FineAP: fine-grained access point deployment strategy for 60 GHz millimeter-wave wireless networks. IEEE Commun Lett. 2023;27(1):381–5. doi:10.1109/LCOMM.2022.3213578. [Google Scholar] [CrossRef]
11. Marinho RP, Vieira LFM, Vieira MAM, Loureiro AAF. CAIN: an energy-aware and intelligent increasing coverage area routing protocol for future 6G networks. Comput Netw. 2023;228(2):109733. doi:10.1016/j.comnet.2023.109733. [Google Scholar] [CrossRef]
12. Kumar S, Jain S, Sharma A. A BER-conscious synthesis of switched-beam antenna to maximize reliable coverage in WSN applications. IEEE Sens J. 2022;22(4):3785–95. doi:10.1109/JSEN.2022.3142137. [Google Scholar] [CrossRef]
13. Vijayaraghavan H, Von Mankowski J, Mas-Machuca C, Kellerer W. PlaciFi: orchestrating optimal 3D access point placement for LiFi-WiFi heterogeneous networks. IEEE Access. 2023;11:115415–29. doi:10.1109/access.2023.3325097. [Google Scholar] [CrossRef]
14. Dao TK, Nguyen TT. An optimal node localization in WSN based on siege whale optimization algorithm. Comput Model Eng Sci. 2024;138(3):2201–37. doi:10.32604/cmes.2023.029880. [Google Scholar] [CrossRef]
15. Qi C, Huang J, Liu X, Zong G. A novel mobile-coverage scheme for hybrid sensor networks. IEEE Access. 2020;8:121678–92. doi:10.1109/access.2020.3007267. [Google Scholar] [CrossRef]
16. Zheng J, Huang Y, Wang Y, Xiao Y. Deterministic deployment based on information coverage in wireless sensor networks. Wirel Commun Mob Comput. 2014;14(18):1657–71. doi:10.1002/wcm.2304. [Google Scholar] [CrossRef]
17. Yang L, Liang J, Liu W. Graphical deployment strategies in radar sensor networks (RSN) for target detection. EURASIP J Wirel Commun Netw. 2013;2013(1):55. doi:10.1186/1687-1499-2013-55. [Google Scholar] [CrossRef]
18. Zhang S, Wu D, Jiang L, Jin X, Cen S. Research on UAV access deployment algorithm based on improved virtual force model. KSII Trans Internet Inf Syst. 2022;16(8):2606–26. doi:10.3837/tiis.2022.08.008. [Google Scholar] [CrossRef]
19. Wang J, Guo H. Virtual force field coverage algorithms for wireless sensor networks in water environments. Int J Sens Netw. 2020;32(3):174. doi:10.1504/ijsnet.2020.105564. [Google Scholar] [CrossRef]
20. Li J, Zhang B, Cui L, Chai S. An extended virtual force-based approach to distributed self-deployment in mobile sensor networks. Int J Distrib Sens Netw. 2012;8(3):417307. doi:10.1155/2012/417307. [Google Scholar] [CrossRef]
21. Li S, Zhou Y, Luo Q. Enhanced multi-object dwarf mongoose algorithm for optimization stochastic data Fusi on wireless sensor network deployment. Comput Model Eng Sci. 2025;142(2):1955–94. doi:10.32604/cmes.2025.059738. [Google Scholar] [CrossRef]
22. Yao Y, Li Y, Xie D, Hu S, Wang C, Li Y. Coverage enhancement strategy for WSNs based on virtual force-directed ant lion optimization algorithm. IEEE Sens J. 2021;21(17):19611–22. doi:10.1109/JSEN.2021.3091619. [Google Scholar] [CrossRef]
23. Yao Y, Hu S, Li Y, Wen Q. A node deployment optimization algorithm of WSNs based on improved moth flame search. IEEE Sens J. 2022;22(10):10018–30. doi:10.1109/JSEN.2022.3166804. [Google Scholar] [CrossRef]
24. Mohar SS, Goyal S, Kaur R. Optimum deployment of sensor nodes in wireless sensor network using hybrid fruit fly optimization algorithm and bat optimization algorithm for 3D Environment. Peer Peer Netw Appl. 2022;15(6):2694–718. doi:10.1007/s12083-022-01364-x. [Google Scholar] [CrossRef]
25. Muhammad H, Nam H. Sensor node deployment optimization for continuous coverage in WSNs. Sensors. 2025;25(12):3620. doi:10.3390/s25123620. [Google Scholar] [PubMed] [CrossRef]
26. Sun S, Chen Y, Dong L. An optimization method for wireless sensor networks coverage based on genetic algorithm and reinforced whale algorithm. Math Biosci Eng. 2024;21(2):2787–812. doi:10.3934/mbe.2024124. [Google Scholar] [PubMed] [CrossRef]
27. Zhao J, Zhang Z, Yi Z, Ma X, Zhang Q. Deployment of edge computing nodes in IoT: effective implementation of simulated annealing method based on user location. China Commun. 2024;21(1):279–96. doi:10.23919/jcc.fa.2021-0034.202401. [Google Scholar] [CrossRef]
28. Liu Z, Xu F. Joint AP selection and grey wolf optimization based pilot design for cell-free massive MIMO systems. IEICE Trans Fundamentals. 2024;E107.A(7):1011–8. doi:10.1587/transfun.2023eap1085. [Google Scholar] [CrossRef]
29. Saranya VG, Karthik S. Bio-inspired intelligent routing in WSN: integrating mayfly optimization and enhanced ant colony optimization for energy-efficient cluster formation and maintenance. Comput Model Eng Sci. 2024;141(1):127–50. doi:10.32604/cmes.2024.053825. [Google Scholar] [CrossRef]
30. Alghamdi AS, Zohdy MA, Aldoihi S. Enhancing renewable energy integration: a Gaussian-bare-bones levy cheetah optimization approach to optimal power flow in electrical networks. Comput Model Eng Sci. 2024;140(2):1339–70. doi:10.32604/cmes.2024.048839. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools