
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Efficient Numerical Scheme for Solving Large System of Nonlinear Equations
1 Department of Mathematics and Statistics, Riphah International University, I-14, Islamabad, 44000, Pakistan
2 Department of Mathematics, Yildiz Technical University, Faculty of Arts and Science, Esenler, 34210, Istanbul, Turkey
3 Science and Math Program, Asian University for Women, Chattogram, Bangladesh
4 Mechanical Engineering Department, College of Engineering, King Khalid University, Abha, 61421, Saudi Arabia
* Corresponding Author: Nasreen Kausar. Email:
Computers, Materials & Continua 2023, 74(3), 5331-5347. https://doi.org/10.32604/cmc.2023.033528
Received 19 June 2022; Accepted 15 September 2022; Issue published 28 December 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
A fifth-order family of an iterative method for solving systems of nonlinear equations and highly nonlinear boundary value problems has been developed in this paper. Convergence analysis demonstrates that the local order of convergence of the numerical method is five. The computer algebra system CAS-Maple, Mathematica, or MATLAB was the primary tool for dealing with difficult problems since it allows for the handling and manipulation of complex mathematical equations and other mathematical objects. Several numerical examples are provided to demonstrate the properties of the proposed rapidly convergent algorithms. A dynamic evaluation of the presented methods is also presented utilizing basins of attraction to analyze their convergence behavior. Aside from visualizing iterative processes, this methodology provides useful information on iterations, such as the number of diverging-converging points and the average number of iterations as a function of initial points. Solving numerous highly nonlinear boundary value problems and large nonlinear systems of equations of higher dimensions demonstrate the performance, efficiency, precision, and applicability of a newly presented technique.Keywords
Determining the roots of polynomial equations is among the oldest problems in mathematics, whereas polynomial equations have a wide range of applications in science and engineering. For example, aerospace engineers may use polynomials to determine the acceleration of a rocket or jet, and mechanical engineers use polynomials to research and design engines and machines. The search for finding the roots of a system of polynomials and a system of linear or nonlinear equations is one of the primal and difficult problems with wide applications in science, engineering, finance and particular in differential equations. Iterative numerical schemes for solving nonlinear systems of equations associated with initial value problems or boundary value problems are very important because, in general, obtaining a closed form solution using the analytical or exact technique is quite difficult. Generally, nonlinear initial value problems or boundary value problems are solved in two main steps i.e., first to discretize the problem using the difference method, finite difference method, finite element method, Pseudo-Spectral collocation method to the obtained tridiagonal system of linear or nonlinear equations, and in the second step, some numerical iterative numerical schemes are used to solve the tridiagonal system of linear or nonlinear equations.
The first famous, effective and very simple scheme is Newton’s method to solve a nonlinear system of equations is given as:
where
Method (2), has quadratic convergence locally. A lot of modifications have been made in classical Newton’s Raphson method in order to reduce the number of function and Jacobin evaluations in each iteration step, and so accelerate the convergence order. The extension of the classical Newton method, as described by Weerakoon et al. [1], Özban [2], Gerlach [3] and Young et al. [4], to the function of serval variable has been developed in [5–7] and references therein.
An open closed quadrature-based iterative method was designed by Frontini et al. [8]. This method was improved by Darvishi et al. [9] to obtain a fourth-order scheme. A number of methods, such as the domain decomposition method [10,11], the weight function technique [12], and the replacement of the higher derivative by an approximation [13–15], were used to develop iterative methods to solve a system of nonlinear equation.
The fundamental goal of this study is to construct a higher-order iterative method for solving nonlinear system of equations and highly nonlinear boundary value problems. Basins of attraction are used to demonstrate the efficiency of our method in comparison to the literature’s existing method.
This article is organized as follows: Following the introduction in Section 1, Section 2 provides a brief description of method construction and convergence analysis. The dynamical aspect of the proposed technique’s attraction basins is discussed in Section 3. The numerical outcomes of the proposed method and comparisons to other higher-order existing methods from the literature are shown in Section 4. The paper concludes with Section 5.
2 Construction of Numerical Methods and Convergence Analysis
This section presents some well-known existing iterative schemes of fifth-order convergence.
In 2020, Singh [16] proposed the following fifth-order technique (
where
In 2013, Zhang et al. [17] presented the fifth-order iterative technique (
where
Cordero et al. [18] developed the following fifth-order iterative scheme (
where
Cordero et al. [18] also constructed the following fifth-order iterative scheme (
where
The following scheme (abbreviated as
where
Convergence analysis
For the iteration schemes (7), we have the following convergence theorem by using the computer algebra system CAS-Maple 18 and finding the error relation of the iterative schemes defined in (7).
Theorem Let the function
where
Proof: Let
and
Dividing Eq. (9) by
Expanding
Using Eq. (13) and Eq. (15) in the second-step of Eq. (7), we get:
Hence, it proves the theorem
The basins of attraction [19–22] is a graphical representation of how root-finding algorithms respond to different initial estimate points. It is more than a graphical illustration of how a root-finding approach works; it also enables the comparsion of qualitative issues. Visual analysis of dynamical planes, i.e., basins of attraction, is another effective and profitable means of demonstrating the usefulness of iterative methods for solving nonlinear equations with these advantageous properties. A complex square

Figure 1: The program’s outcome—the basins of attraction for

Figure 2: The program’s outcome—the basins of attraction for

Figure 3: The program’s outcome—the basins of attraction for

Figure 4: The program’s outcome—the basins of attraction for

Figure 5: The program’s outcome—the basins of attraction for

Figure 6: The program’s outcome—the basins of attraction for
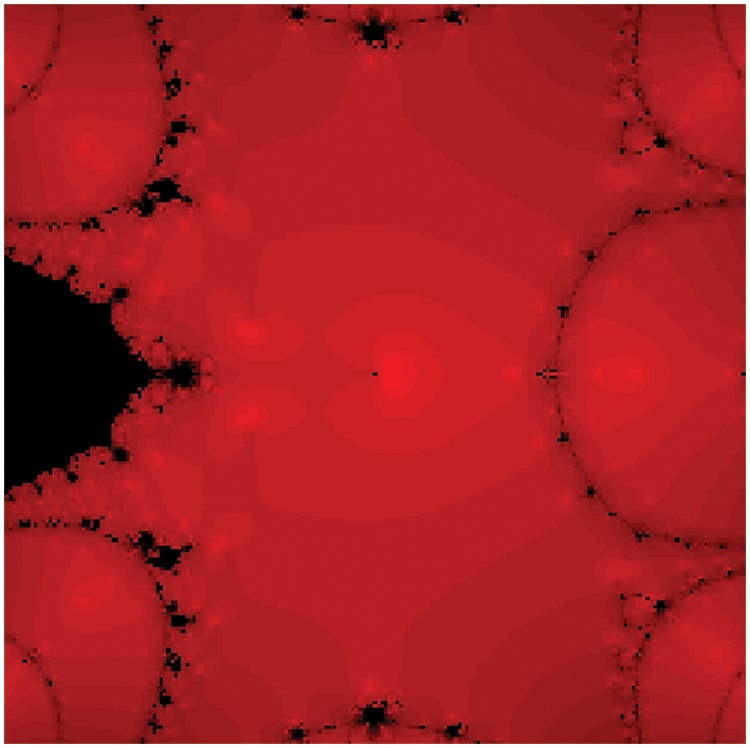
Figure 7: The program’s outcome—the basins of attraction for

Figure 8: The program’s outcome—the basins of attraction for

Figure 9: The program’s outcome—the basins of attraction for

Figure 10: The program’s outcome—the basins of attraction for

Figure 11: The program’s outcome—the basins of attraction for

Figure 12: The program’s outcome—the basins of attraction for
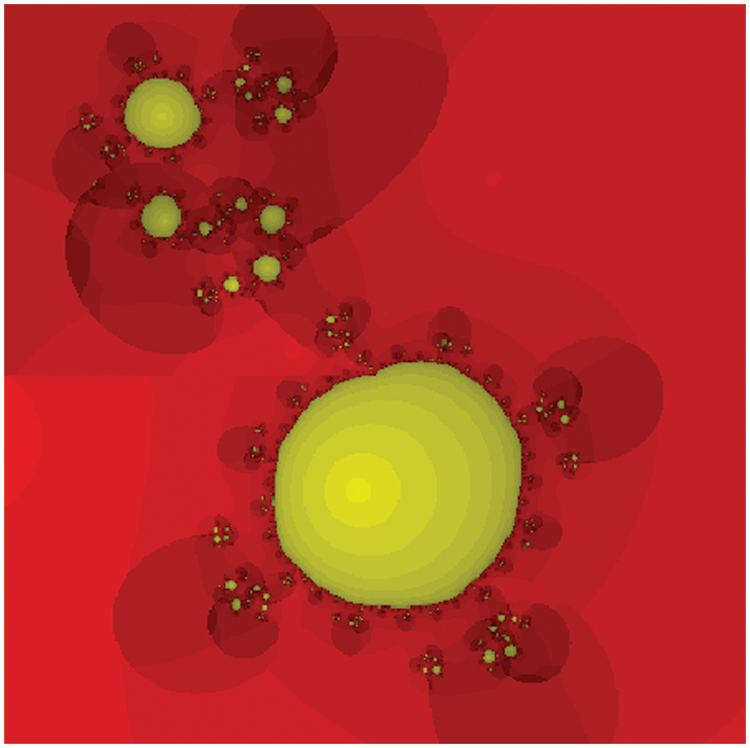
Figure 13: The program’s outcome—the basins of attraction for

Figure 14: The program’s outcome—the basins of attraction for
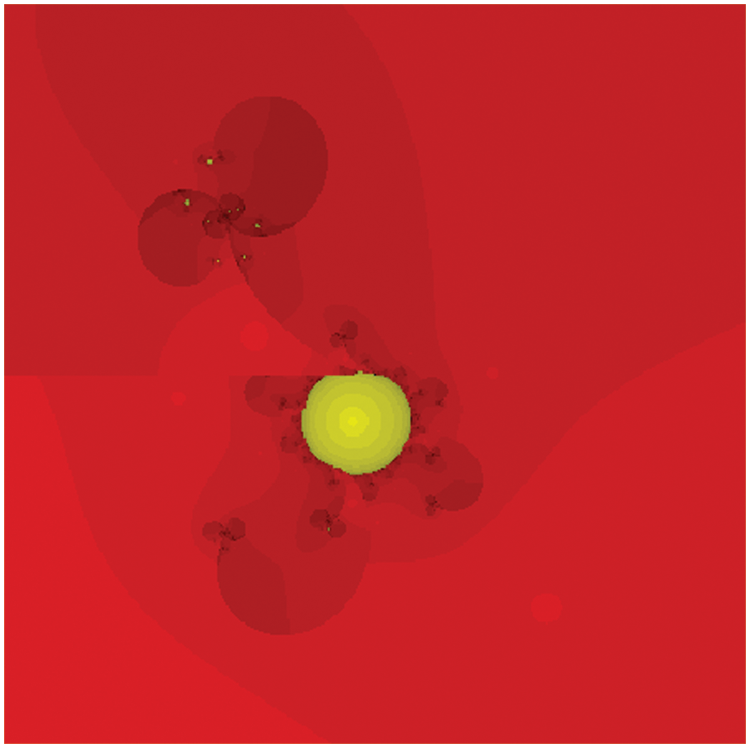
Figure 15: The program’s outcome—the basins of attraction for
Eq. (20) has the following exact roots
Eq. (21) has one real root i.e., 1.135001329.
Eq. (22) has the following exact roots
In Tables 1–3, CPU-Time refers to the elapsed time in seconds, Start-Points denote the number of starting points, i.e., 490,000 in a square, Con-Points represent the number of converging points, and Div-Points signify the number of divergent points for the creation of dynamical planes (Attractions’ basins). In terms of CPU-Time, Average-It, Start-Points, Con-Points, and Div-Points, Tables 1–3 clearly show that our newly developed technique



The following iterative techniques are used to solve some extremely non-linear boundry value problem BVP and a large system of non-linear equations:
1. The newly constructed method
2. Singh et al.’s method
3. Zhang et al.’s method
4. Cordero et al.’s method
5. Cordero et al.’s method
All numerical computations are done using maple 18.0 with 75-digit floating point arithmetic in a laptop having Processor Intel® Core™ i3-3310 m CPU@2.4 GHz with a 64-bit operating system on Window 8. We terminate the computer program when the following stopping criterion is satisfied:
where
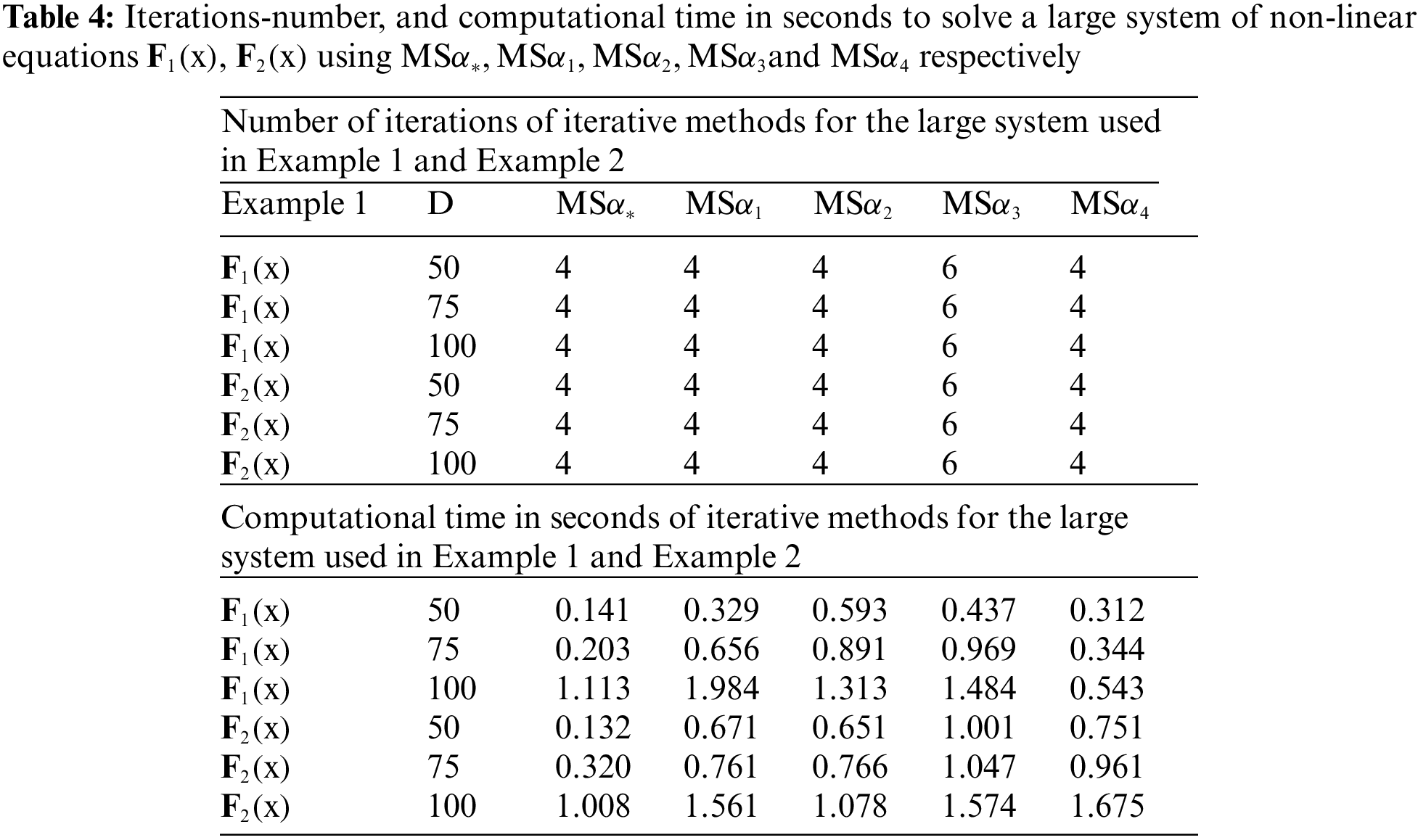




Example 1: N-Demission Problem [23]
Consider
the exact solution of the system Eq. (23) is
Example 2: N-Dimensional Problems [23]
Consider
the exact solution of the system Eq. (24) is
Application in Differential Equation
Here, we solve some highly non-linear BVPs using the newly constructed iterative method and existing methods in literature to show the dominance efficiency of our methods
Consider the non-linear boundary value problem (BVP-I):

Figure 16: Numerical solution of BVP-1 using shooting methods,
By dividing the interval [0,1] into n = 22 equal subinterval as:
Assuming
In non-linear boundary value problem Eq. (25), we get the following non-linear system of equations:
We chose the following initial approximation
We solve the nonlinear system of equations Eq. (28) by taking
A precise approach was developed in this paper for constructing iterative schemes. Using Computer Algebra System CAS-symbolic computation with strong speeding iterative numerical schemes, we developed novel efficient numerical iterative methods for solving nonlinear systems of equations. We were prompted to use symbolic computation via multiple programs written in the computer algebra system CAS-Maple due to the fact that the newly derived technique required lengthy and complicated mathematical statements. Maple was used to perform numerical examples of higher-order nonlinear systems of equations as well as to solve some highly nonlinear BVPs. These examples revealed that the newly developed approaches’ theoretical order of convergence corresponds to the computational outcomes. In addition to providing visual insight into the convergence behavior of iterative methods, the generation of basins of attraction could also generate qualitative concerns for comparison. It is evident from all Figs. 1–16 and Tables 1–8, that the iterative schemes
Funding Statement: The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work through the Large Groups Project under grant number RGP. 2/235/43.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. S. Weerakoon and T. G. I. Fernando, “A variant of newton’s method with accelerated third-order convergence,” Applied Mathematics Letters, vol. 13, no. 8, pp. 87–93, 2000. [Google Scholar]
2. A. Y. Özban, “Some new variants of newton’s method,” Applied Mathematics Letters, vol. 17, no. 6, pp. 677–682, 2004. [Google Scholar]
3. J. Gerlach, “Accelerated convergence in newton’s method,” SIAM Review, vol. 36, no. 2, pp. 272–276, 1994. [Google Scholar]
4. J. Young and M. David, “AM ostrowski, solution of equations and systems of equations,” Bulletin of the American Mathematical Society, vol. 68, no. 4, pp. 306–308, 1962. [Google Scholar]
5. A. Cordero and J. R. Torregrosa, “Variants of newton’s method for functions of several variables,” Applied Mathematics and Computation, vol. 183, no. 1, pp. 199–208, 2006. [Google Scholar]
6. W. Haijun, “New third-order method for solving systems of nonlinear equations,” Numerical Algorithms, vol. 50, no. 3, pp. 271–282, 2009. [Google Scholar]
7. A. Cordero and J. R. Torregrosa, “On interpolation variants of newton’s method for functions of several variables,” Journal of Computational and Applied Mathematics, vol. 234, no. 1, pp. 34–43, 2010. [Google Scholar]
8. M. Frontini and E. Sormani, “Third-order methods from quadrature formulae for solving systems of nonlinear equations,” Applied Mathematics and Computation, vol. 149, no. 3, pp. 771–782, 2004. [Google Scholar]
9. M. T. Darvishi and A. Barati, “A fourth-order method from quadrature formulae to solve systems of nonlinear equations,” Applied Mathematics and Computation, vol. 188, no. 1, pp. 257–261, 2007. [Google Scholar]
10. G. Adomian, “Solution of physical problemes by decomposition,” Computers & Mathematics with Applications, vol. 27, no. 9, pp. 145–154, 1994. [Google Scholar]
11. D. K. R. Babajee, M. Z. Dauhoo, M. T. Darvishi and A. Barati, “A note on the local convergence of iterative methods based on adomian decomposition method and 3-node quadrature rule,” Applied Mathematics and Computation, vol. 200, no. 1, pp. 452–458, 2008. [Google Scholar]
12. A. Cordero, E. Martínez and J. R. Torregrosa, “Iterative methods of order four and five for systems of nonlinear equations,” Journal of Computational and Applied Mathematics, vol. 231, no. 2, pp. 541–551, 2009. [Google Scholar]
13. J. F. Traub, “Computational complexity of iterative processes,” SIAM Journal on Computing, vol. 1, no. 2, pp. 167–179, 1972. [Google Scholar]
14. S. A. Sariman and I. Hashim, “New optimal newton-householder methods for solving nonlinear equations and their dynamics,” Computers, Materials & Continua, vol. 65, no. 1, pp. 69–85, 2020. [Google Scholar]
15. J. R. Sharma, R. K. Guha and R. Sharma, “An efficient fourth order weighted-newton method for systems of nonlinear equations,” Numerical Algorithms, vol. 62, no. 2, pp. 307–323, 2013. [Google Scholar]
16. A. Singh, “An efficient fifth-order iterative scheme for solving a system of nonlinear equations and PDE,” International Journal of Computing Science and Mathematics, vol. 11, no. 4, pp. 316–326, 2020. [Google Scholar]
17. X. Zhang and J. Tan, “The fifth order of three-step iterative methods for solving systems of nonlinear equations,” Mathematica Numerica Sinica, vol. 35, no. 3, pp. 297–304, 2013. [Google Scholar]
18. A. Cordero and J. R. Torregrosa, “Variants of newton’s method using fifth order quadrature formulas,” Applied Mathematics and Computation, vol. 190, no. 1, pp. 686–698, 2007. [Google Scholar]
19. A. Naseem, M. Rehman and T. Abdeljawad, “Computational methods for non-linear equations with some real-world applications and their graphical analysis,” Intelligent Automation & Soft Computing, vol. 30, no. 3, pp. 805–819, 2021. [Google Scholar]
20. Y. M. Chu, N. Rafiq, M. Shams, S. Akram, N. A. Mir et al., “Computer methodologies for the comparison of some efficient derivative free simultaneous iterative methods for finding roots of non-linear equations,” Computers, Materials & Continua, vol. 66, no. 1, pp. 275–290, 2021. [Google Scholar]
21. O. S. Solaiman and I. Hashim, “Optimal eighth-order solver for nonlinear equations with applications in chemical engineering,” Intelligent Automation & Soft Computing, vol. 27, no. 2, pp. 379–390, 2021. [Google Scholar]
22. M. Shams, N. Rafiq, N. A. Mir, B. Ahmad, S. Abbasi et al., “On computer implementation for comparison of inverse numerical schemes for non-linear equations,” CSSE-Computer Systems Science & Engineering, vol. 36, no. 3, pp. 493–507, 2021. [Google Scholar]
23. M. Q. Khirallah and M. A. Hafiz, “Solving system of nonlinear equations using family of jarratt methods,” International Journal of Differential Equations and Applications, vol. 12, no. 2, pp. 69–83, 2013. [Google Scholar]
24. R. L. Burden and J. D. Faires, “Boundary-value problems for ordinary differential equations,” in Numerical Analysis, 9th ed., vol. 1. Boston, MA 02210, USA: Belmount Thomson Brooks/Cole Press, pp. 1–863, 2005. [Google Scholar]
25. Y. Lin, “Enclosing all solutions of two point boundary value problems for ODEs,” Computer and Chemical Engineering, vol. 32, no. 8, pp. 1714–1725, 2008. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools