
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

Survey of Indoor Localization Based on Deep Learning
1 Centre for Wireless Technology, Faculty of Engineering, Multimedia University, Cyberjaya, 63100, Malaysia
2 Communication Systems & Networks Research Lab, Malaysia-Japan International Institute of Technology, Universiti Teknologi Malaysia, Kuala Lumpur, 54100, Malaysia
3 Department of Electrical Engineering (DEE), International Islamic University, Islamabad, 44000, Pakistan
4 Rohde & Schwarz (M) Sdn Bhd, Shah Alam, 40150, Malaysia
* Corresponding Author: Mardeni Roslee. Email:
Computers, Materials & Continua 2024, 79(2), 3261-3298. https://doi.org/10.32604/cmc.2024.044890
Received 11 August 2023; Accepted 14 December 2023; Issue published 15 May 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This study comprehensively examines the current state of deep learning (DL) usage in indoor positioning. It emphasizes the significance and efficiency of convolutional neural networks (CNNs) and recurrent neural networks (RNNs). Unlike prior studies focused on single sensor modalities like Wi-Fi or Bluetooth, this research explores the integration of multiple sensor modalities (e.g., Wi-Fi, Bluetooth, Ultra-Wideband, ZigBee) to expand indoor localization methods, particularly in obstructed environments. It addresses the challenge of precise object localization, introducing a novel hybrid DL approach using received signal information (RSI), Received Signal Strength (RSS), and Channel State Information (CSI) data to enhance accuracy and stability. Moreover, the study introduces a device-free indoor localization algorithm, offering a significant advancement with potential object or individual tracking applications. It recognizes the increasing importance of indoor positioning for location-based services. It anticipates future developments while acknowledging challenges such as multipath interference, noise, data standardization, and scarcity of labeled data. This research contributes significantly to indoor localization technology, offering adaptability, device independence, and multifaceted DL-based solutions for real-world challenges and future advancements. Thus, the proposed work addresses challenges in object localization precision and introduces a novel hybrid deep learning approach, contributing to advancing location-centric services. While deep learning-based indoor localization techniques have improved accuracy, challenges like data noise, standardization, and availability of training data persist. However, ongoing developments are expected to enhance indoor positioning systems to meet real-world demands.Keywords
Indoor localization refers to the process of determining the main location of an individual or an object that its positioned in a building or a closed environment [1,2]. This is different from outdoor localization, which can rely on GPS and other global positioning technologies [3]. Indoor localization is more challenging and requires different techniques [4,5]. There are several approaches to indoor localization, each with its strengths and weaknesses. One common method is based on Wi-Fi signals, which can be used to estimate the position of a device by measuring the strength of the signal from multiple access points [6]. This method is relatively easy to implement and can achieve good accuracy in certain environments, but it is sensitive to changes in the environment and can be affected by interference from another wireless device [7].
Another approach is based on Bluetooth low energy (BLE) beacons, which can be placed throughout a building to provide location information to nearby devices. BLE beacons are low-cost and low-power, making them an attractive option for indoor localization [8]. However, they require a dense network of beacons to achieve accurate localization, which can be difficult and expensive to deploy [9]. Other indoor localization methods include acoustic and visual techniques, such as using microphones and cameras to capture sound image data and analyze it to determine the location of objects or people. These methods can be highly accurate but require specialized hardware and software and may raise privacy concerns [10].
Indoor localization finds extensive applications, ranging from navigation and asset tracking to security; however, it poses persistent challenges, needing a one-size-fits-all solution [7]. The choice of a localization method hinges on numerous factors, including environmental conditions, required accuracy levels, and the cost-complexity trade-offs [1]. It is noteworthy that the fingerprint-based methods come with some challenges as shown in Fig. 1.
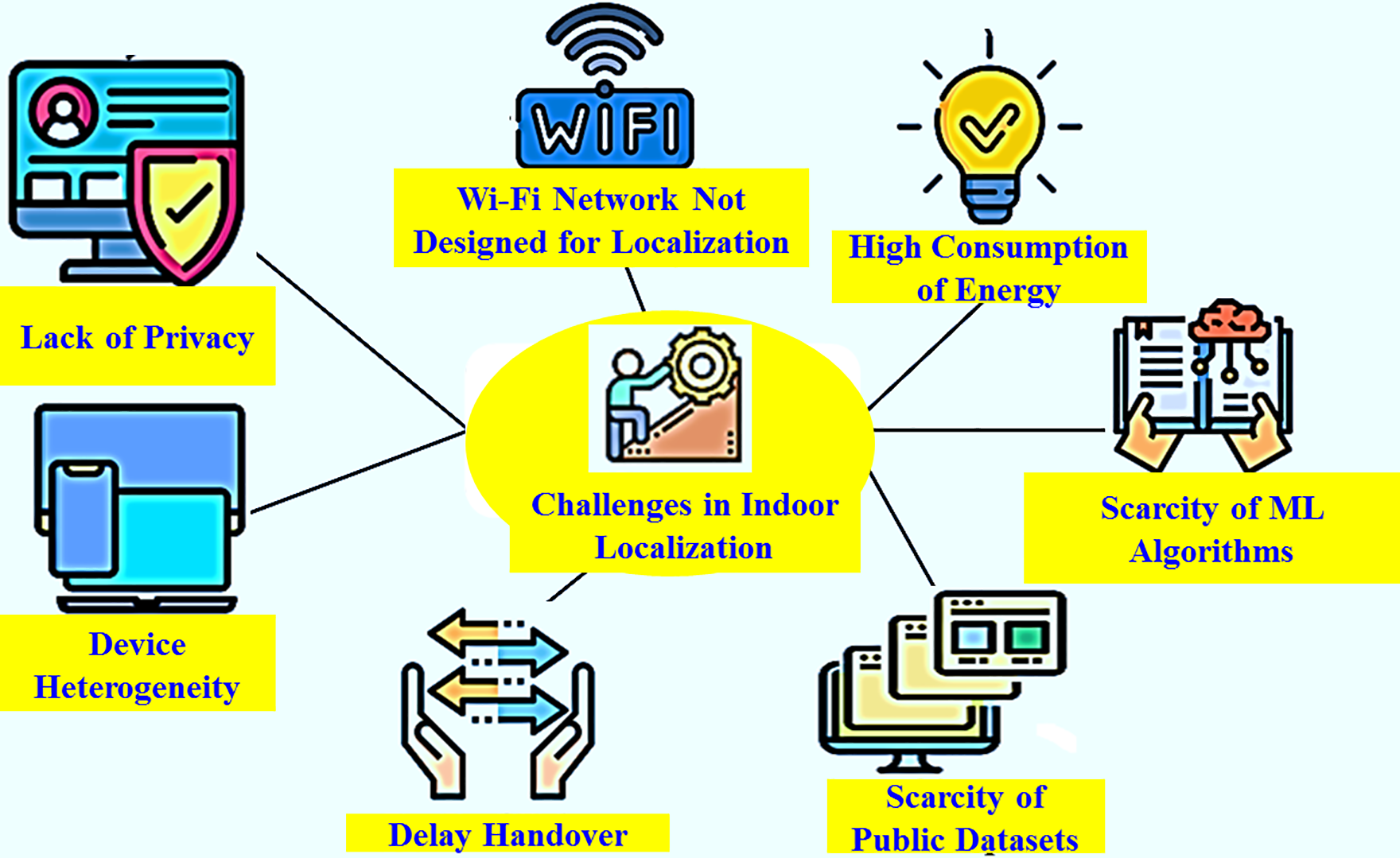
Figure 1: Current challenges of fingerprinting-based indoor localization
DL, a subset of Machine Learning (ML), harnesses Artificial Neural Networks to discern patterns in data, enjoying widespread adoption across fields like computer vision and natural language processing [11]. Within the realm of indoor localization, DL has garnered considerable attention. DL-based techniques leverage sensor data from sources like Wi-Fi, Bluetooth, and accelerometers to train neural networks for precise user positioning [12]. These methods exhibit superior accuracy and resilience to environmental fluctuations compared to traditional approaches [13].
CNNs frequently feature in processing Wi-Fi signal strength data, involving the training of networks on extensive datasets comprising Wi-Fi signal intensity measurements and their corresponding locations. Once trained, these networks proficiently identify device locations based on Wi-Fi signal assessments [14]. On the other hand, RNNs handle sequential data, such as accelerometer readings, by training on datasets consisting of accelerometer data and associated positions. Post-training, RNNs can predict device locations using accelerometer data [15]. DL-based indoor localization techniques offer notable advantages, including handling complex data, delivering high accuracy, and exhibiting resilience to environmental variations [16].
Thus, DL-based indoor localization techniques offer distinct advantages over conventional methods, including their capacity to manage complex data, deliver exceptional accuracy, and exhibit resilience to environmental fluctuations [17]. However, they have several drawbacks, such as the need for large volumes of training data and the high processing costs of training and inference. DL-based indoor localization techniques have shown encouraging results and are still being actively researched. DL may play a more significant part in indoor localization as sensor data becomes more readily available [17,18].
This study comprehensively examines DL applications in indoor positioning, emphasizing the significance of CNNs and RNNs. Unlike previous research that primarily focuses on individual sensor modalities like Wi-Fi or Bluetooth, this investigation explores the integration of multiple sensors, including Wi-Fi, Bluetooth, Ultra-Wideband, and ZigBee, to enhance indoor localization in obstructed environments. The study addresses object localization precision and stability issues, introducing a novel hybrid DL approach utilizing RSI, RSS, and CSI data. This innovative algorithm enables device-free indoor localization, particularly useful for tracking objects or individuals not actively participating. It recognizes the growing demand for location-based services and the challenges of DL-based indoor localization, such as multipath interferences and data standardization. Overall, this research contributes significantly to indoor positioning by proposing an adaptable, device-independent, and multifaceted DL algorithm, paving the way for future advancements in location-centric services. Fig. 2 provides the structure of the proposed work.
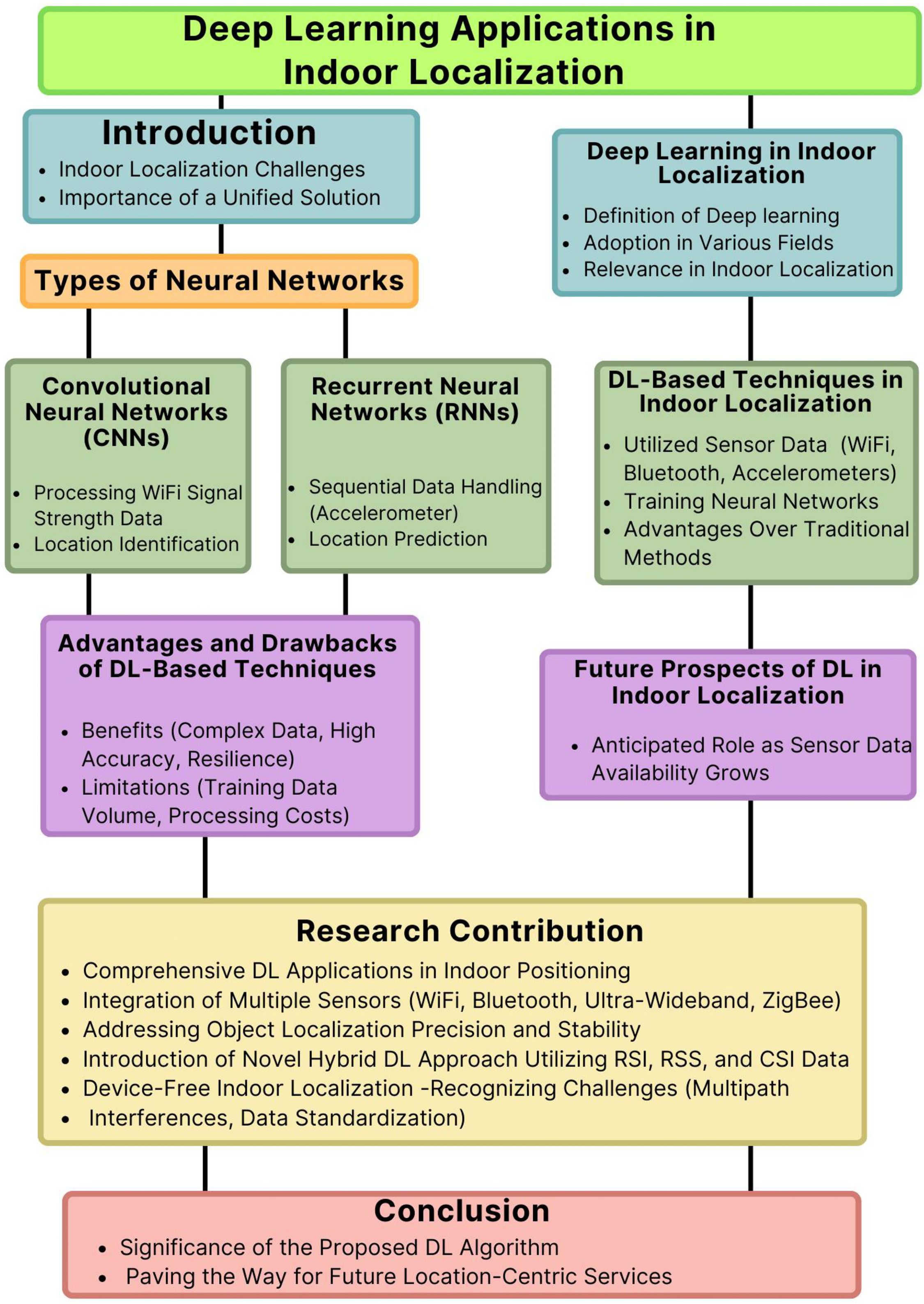
Figure 2: Structure of the proposed indoor localization
The paper is structured into different sections, each discussing a particular aspect of indoor localization. Section 2 provides a detailed review of deep-learning approaches for indoor localization. In Section 3, the technologies used for indoor localization are explored. Section 4 focuses on the Radio Wave Indoor Localization concept, while Sections 5 to 9 discuss other techniques such as Wireless Fidelity-based localization, Bluetooth-based localization, ZigBee-based localization, Ultra-Wideband-based Localization, and Radio Frequency Identification Localization. Section 10 provides an in-depth examination of various localization techniques, while Section 11 addresses the methods related to Channel State Information. Section 12 identifies and explains the challenges that come with indoor-based localization. Section 13 is dedicated to Emerging Indoor Localization Studies, and finally, Section 14 summarizes the key findings and insights derived from the survey, serving as the conclusion of this paper.
2 Review of Indoor Localization-Based Approaches Using Deep Learning
Radio wave propagation that is used for indoor localization comes with lots of complexities which is mainly characterized by Non-Line-of-Sight (NLOS) path signal transmission and propagation that usually takes place in the presence of lots of signal impairments agents such as noise, tress, environment changes, finding, etc., hence obtaining high localization is still challenging. To address these challenges, several techniques have been proposed to mitigate this challenge. In most cases, these solutions could be defined in groups either as a device-based approach or a device-free approach [18]. It is crucial to acknowledge the intricacies of indoor radio wave propagation, marked by Non-Line-of-Sight (NLOS) path signal transmission and various signal impairments, including noise, environmental factors, and interference. Consequently, achieving precise indoor localization remains a persistent challenge. In response, the following subsection delineates the two primary categories of techniques proposed to tackle these complexities: Device-based and device-free approaches.
Device-based approaches configure a wireless transmitter in the object to be located and build multiple wireless receivers in the environment. The value of the transmission quality index changes as the location of the object changes. The feature is utilized by the device-based approaches to achieve indoor localization [19]. Delineated hereunder are recent works centered on device-based indoor localization.
References [20] and [21] developed a solution based on a multitask learning network to get over the poor comparability of received signal levels when using Wi-Fi signals from nearby places for indoor localization. The majority of the network is divided into three regions. Then, a neural network is used to infer accurate regional information based on the received signal strength of adjacent locations. The similarity inconsistency problem is then addressed by using a neural network to learn consistent characteristics [17]. Lastly, a regression mode is used to estimate the position. In addition to introducing the fingerprint data gathering method in detail, reference [22–24] offered an indoor user localization method based on Wi-Fi received signal strength. Research has shown that the fingerprint-based method can either be online or offline. The positioning principle for fingerprint positioning is given in Fig. 3. While the later makes use of the received signal for carrying out angle estimation. The location of an indoor user may be predicted by a deep neural networks (DNNs) classification model that uses Media Access Control (MAC) addresses as feature labels and the associated received signal intensities as feature values [25].
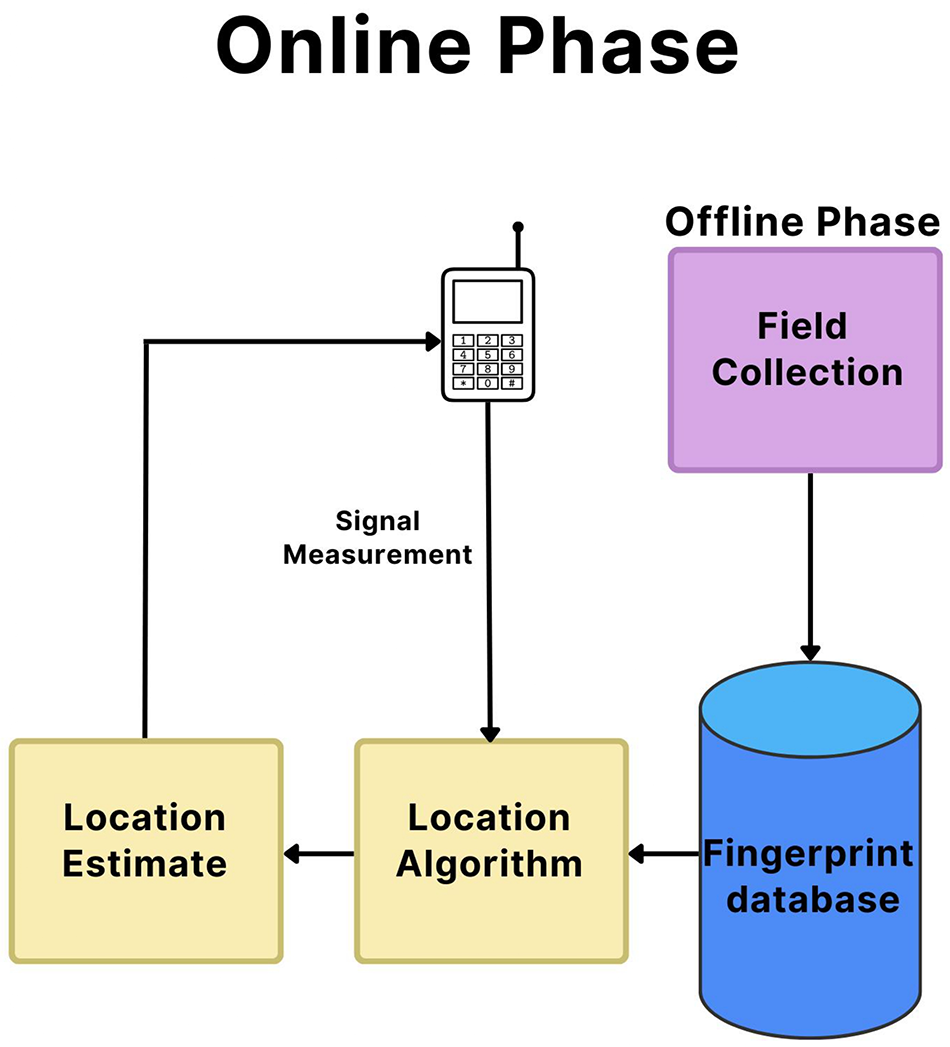
Figure 3: Block diagram of the principle of fingerprint positioning
Long Short-Term Memory (LSTM) Neural Networks and Wi-Fi received signal intensities were combined to create an indoor localization approach that was presented by [22,26]. The experimental findings demonstrate that the localization strategy works well in the L-shaped floor corridors. Using a few beacon devices, reference [27,28] presented a smart parking system. To minimize collisions, the system uses cellphones to detect the strength of beacon signals to find people and cars. The gateway then sends the position information to every cellphone in the parking lot. To find people and cars, a fully linked layer DNN and convolutional neural network classification model is utilized [29]. According to the experimental findings, the vehicle’s position can be estimated with a high degree of accuracy that measures up to 98%, while the pedestrian’s position may be estimated with an accuracy of roughly 70%. A deep belief network-based radio-frequency identification (RFID) indoor localization technique was proposed by [30]. A deep belief network is used to extract deep features from the gathered received signal strength data, and the target is then found by comparing how closely the deep features match the deep features. Using continuous geomagnetic data, reference [31] developed an indoor-based localization technique based on the LSTM Neural Network. In comparison to traditional recurrent neural networks and current RF-based fingerprinting methods, the LSTM Neural Network has a greater localization accuracy. Wi-Fi-based indoor localization system is dependent on Wi-Fi chips, which limits the technology’s ability to be widely used, as noted by [32,33], and [34–36]. Additionally, high-end smartphones are the only ones with inertial sensor-based technologies like accelerometers, gyroscopes, and compasses. They thus proposed a method of indoor localization that makes use of cellular signals that mobile phones can detect. Also, they suggested the lower-bound cropper and the random augmenter as two strategies for training data augmentation. Reference [37] observed that several indoor localization methods relying on Wi-Fi fingerprinting have been proposed as a result of the growing use of indoor Wi-Fi. Unfortunately, the inherent noise and instability of wireless signals usually cause the localization accuracy to decline. Therefore, they recommended WiDeep, a DL-based indoor localization method, to achieve high accuracy and robustness. Each access point’s signal strength is trained by a distinct autoencoder, and a probabilistic fusion procedure using the output of these autoencoders’ latent characteristics is used to estimate each access point’s position. To increase WiDeep’s robustness in noisy situations, the authors additionally present two strategies that inject stochastic noise into the input training data.
According to [38], it has been observed that although DNNs are more commonly employed for localizing sound sources and estimating arrival directions, they still have two notable disadvantages. Firstly, they rely heavily on extensive training data specific to the devices used, which makes it difficult to accurately determine the actual positions of sound sources. Secondly, they exhibit high sensitivity to variations in training and testing conditions. They have researched domain adversarial training and poor supervision as two domain adaption strategies for localizing various sound sources to solve the issues. The neural network’s output is regulated through the use of weak supervision, which aims to align it with the potential output possibilities based on inaccurate labels. Domain adversarial training, on the other hand, seeks to identify features that are invariant across different domains. The experimental results show that while domain adversarial training does not further increase performance, changing the neural network model with minimal supervision results in noticeable gains. A binaural sound localization method for reverberant settings that was inspired by biological systems was proposed in a paper by [39]. To assess the 2D correlation matrix produced by the stereo cochlear system, this technique uses a convolutional neural network. The technique shows the capacity to minimize the average absolute inaccuracy to a range between 90o to 90o.
The device-free technique analyzes the transmission quality index like the device-based categorization, but it does so by placing the transmitter and receiver in the same space without placing the device on the target item [40,41]. To improve indoor location accuracy, the study by [42] used bimodal CSI, which contained Angle of Arrival (AOA) and CSI amplitude. They used a deep residual sharing learning network for model training to get around issues with training time and data storage limitations. The input to the network was split into two channels, with each channel including two AOA time pictures from three antennas and one CSI amplitude-time image from a single antenna. The trial outcomes showed that this method significantly increased the localization accuracy. In another work discussed by [43], device-free indoor localization methods were highlighted for their advantages, which included the ability to track targets that cannot be directly controlled, the capacity to operate in unexpected circumstances, and cost-effectiveness with minimal infrastructure requirements. The researchers looked at a localization approach based on CSI amplitude and a convolutional neural network (classification model), and they also looked at the effect of CSI’s time-varying properties on localization accuracy. When employing just CSI amplitude information, the results showed that the time-varying properties of CSI had a significant impact on localization accuracy [44].
A two-phase localization system was proposed in the study conducted by [1] to estimate an individual’s current location in a residential room by training a DNN using RSS and CSI data between a wireless AP and a network interface card. The offline training phase of the system used RSS and CSI fingerprints (features) to train the suggested DNN and produce a positioning model. Real-time information from the network interface card was utilized to pinpoint a person’s location during the online positioning phase. The one-dimensional CNN used in this study’s innovative localization technique displayed outstanding localization performance with much less network complexity [45]. In addition, reference [46] emphasized the significant potential of deep neural networks in achieving high-precision indoor localization but noted that their underlying principles were not fully understood. By giving mathematical and visual descriptions of the deep learning procedure and the significant properties that deep neural networks gain during training, they attempted to close this gap. The researchers suggested many visualization methods, such as information visualization, visual analysis, and dimensionality reduction visualization.
In summary, the literature selection process for this journal review, which centers on indoor localization employing deep learning techniques, is meticulously conducted. Acknowledging the intricate nature of radio wave propagation within indoor settings, a complexity characterized by NLOS signal paths and various signal disruptions, such as environmental changes, noise, and interference, is crucial. Consequently, the chosen body of literature underlines the pursuit of methodologies to ameliorate these intricate challenges. This careful curation of relevant literature is thoughtfully aligned with the overarching goals of this review, which seeks to elucidate the intricacies of indoor localization through deep learning. This comprehensive approach encompasses device-based and device-free strategies while also considering the most recent advancements and pertinent challenges within this field of research.
3 Technologies Adopted for Indoor Localization
Throughout the years, advancements in wireless communications have given rise to various innovative applications integrated into User Equipment (UE) devices [47,48]. Several of the aforementioned technologies that have been used to offer indoor localization services will be explored and examined in this section. This work discusses radio communication technologies, including IEEE 802.11, Bluetooth, Zigbee, RFID, and UWB. After that, an overview of technologies based on acoustics and visible light will come [49]. Finally, the study explores several cutting-edge technologies that might facilitate localization. Although localization systems based on camera/vision technologies exist, it is crucial to emphasize that they are outside the purview of this survey and will not be covered here [49]. Subsequently, the paper will look into specific wireless communication technologies, including IEEE 802.11, Bluetooth, Zigbee, RFID, and Ultra Wideband (UWB), followed by an examination of acoustic and visible light-based technologies. Additionally, the paper explores emerging technologies with the potential to enhance localization capabilities while clarifying that camera/vision-based systems, though relevant, fall beyond the scope of this survey.
4 Radio Wave Indoor Localization
The large growth in intelligent applications largely demands the location of a user or device that is situated in an indoor environment [21]. There is a growing need to develop localization algorithms that are specific to indoor environments [28]. Indoor location is simply defined as a situation whereby the location of a user in an indoor environment is carried out. The localization process is divided into two parts which include the process of analyzing the signal attenuation phenomenon that results when radio wave devices are used for locating the position of a user [50]. Localization in the indoor environment is usually complex when the radio wave approach is considered. This complexity is a result of Non-Line-of-Sight signal propagation, noise, environmental obstacles, climate change, etc [51]. In this type of scenario, getting an efficient location of a user or device is hard. This is because of the high possibility of location error information. There have been a lot of systems that have been proposed by other researchers to ensure that proper localization of user device is accurately carried out [52]. The details of these techniques are shown in Fig. 4. In the device-based method, the quality index value of the transmitted signal in the wireless receiver usually changes any time the location of the object is changed. Research has shown that the device-free method shows better advantage than the device-based method. Research has shown that the device free method shows a better advantage than the device-based method [53]. This is because, the device free method does not require the user to carry any device. The carriage of a device is mostly stressful for some individuals. In addition, the device free method only makes use of one transmitting and receiving antenna in the localization environment which translates to less cost. As a result of the aforementioned advantages, the device-free method has gained a lot of attention in the past years.
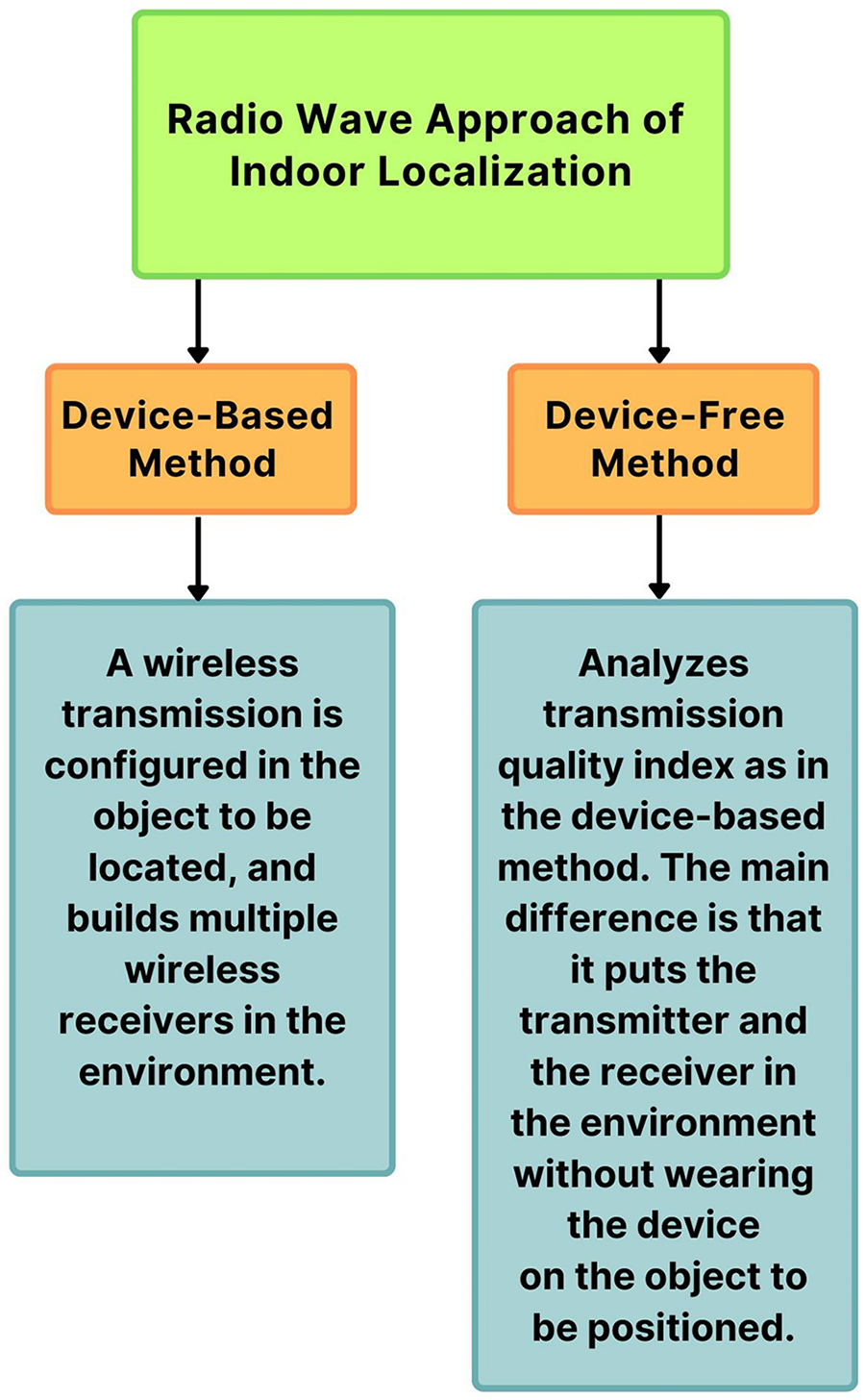
Figure 4: Radio wave approach of indoor localization
The Wi-Fi standard, also known as IEEE 802.11, runs in the Industrial, Scientific, and Medical (ISM) band and was developed primarily to link devices to networks and provide them access to the internet in residential, public, and commercial contexts [54]. Initially, Wi-Fi’s reception range was about 100 meters [55]. The range has been increased to about 1 kilometer (km) thanks to IEEE 802.11ah, which is primarily designed for Internet of Things (IoT) services [56].
Throughout the years, multiple variations of Wi-Fi have been introduced, identified by the IEEE 802.11 label followed by one or two letters that indicate specific characteristics of the Wi-Fi variant [26,47,57]. For instance, IEEE 802.11a/b/g/n/ac/ad are successive standards that aim to enhance communication speed [58]. Regarding security, Wi-Fi has undergone several improvements, evolving from wired equivalent privacy (WEP) to WPA2, Wi-Fi Protected Access (WPA), WPA2-Enterprise (802.1X), IEEE 802.11i, WPA2-Pre-Shared Key (PSK), and the current protection of management frames using IEEE 802.11w. In terms of location estimation services, researchers have primarily focused on the IEEE 802.11a/b/g variants. Nevertheless, the extra features of standards such as IEEE 802.11n/ac/i/v are also vital in enhancing the localization-based services offered by these standards [47,59]. To prevent interference and ensure smooth transmission, Wi-Fi uses a technique called spread spectrum. This involves spreading the signal over a wider range of frequencies, which makes it less susceptible to interference and noise [60]. Indoor localization techniques heavily rely on the evolution and various types of Wi-Fi as described. The subsequent sections explore these Wi-Fi standards’ specific contributions and implications. Furthermore, the utilization of spread spectrum techniques, discussed earlier, is fundamental to understanding how Wi-Fi enables reliable data transmission, a key aspect elaborated upon in the upcoming sections.
A common technique for indoor positioning and navigation, Wi-Fi-based localization leverages signals from Wi-Fi access points to pinpoint the location of a device [51]. The fundamental idea underlying Wi-Fi-based localization is to estimate the distance between a device and an access point using the received signal strength indicator (RSSI) of Wi-Fi signals [52]. The device’s position may then be ascertained using this distance data. There are two main approaches to Wi-Fi-based localization: fingerprinting and trilateration.
i) This approach involves creating a database of RSSI values at known locations in the environment, called fingerprints. When a device is localized, its RSSI values are compared to the fingerprints in the database, and the device is located based on the closest match. ML techniques can be used to improve the accuracy and efficiency of fingerprinting-based localization [61,62].
ii) Trilateration: This approach involves measuring the RSSI values from at least three access points, and using these measurements to calculate the device’s location using trilateration algorithms. Trilateration is more computationally intensive than fingerprinting but can provide more accurate results [63,64].
5.2 Wi-Fi-Based Localization Based on Deep Learning
DL can also be used for Wi-Fi-based localization to improve the accuracy and robustness of the system. For example, CNNs can be used to process the RSSI data and make predictions about the device’s location [65]. RNNs can also be used to model the temporal dependencies between the RSSI measurements, which can be useful for predicting the location of a moving device [65].
One of the advantages of Wi-Fi-based localization is the ubiquity of Wi-Fi access points in indoor environments, which makes it a cost-effective solution for indoor positioning and navigation [66]. However, Wi-Fi-based localization can be affected by interference and obstacles in the environment, and the accuracy of the system can vary depending on the density and distribution of access points [67].
Bluetooth, also known as IEEE 802.15.1, is designed to facilitate wireless communication over short distances between devices. It utilizes radio waves with frequencies ranging from 2.402 to2.480 GHz within the Industrial, Scientific, and Medical (ISM) band. Within this frequency range, three channels are allocated for advertisement purposes, while 37 channels are designated as data channels [53]. Bluetooth offers several features that contribute to its popularity, including cost-effectiveness, low transmission power, long battery life, secure and efficient communication, and easily accessible solutions [34,68,69].
A newer version of Bluetooth, known as Bluetooth Low Energy (BLE), has emerged. BLE can cover a range of 70 to 100 meters and provide a data rate of 24 Mbps, all while maintaining higher power efficiency compared to previous versions [70,71]. This makes BLE particularly well-suited for indoor localization and represents a significant step forward in expanding Bluetooth’s ecosystem into the Internet of Things (IoT) domain [47,72]. To establish a seamless connection with the subsequent subsection, it is imperative to recognize that Bluetooth, encompassing its low-energy variant BLE, plays a pivotal role in indoor localization technologies. This fundamental understanding of Bluetooth’s capabilities will serve as a springboard for the exploration of its applications in the following section.
6.1 Bluetooth-Based Localization
Bluetooth-based localization is another popular method for indoor positioning and navigation that uses Bluetooth beacons to determine the location of a device. Bluetooth beacons are small devices that transmit a signal that can be detected by Bluetooth-enabled devices, such as smartphones or tablets [32,33,41]. Bluetooth-based localization is often used in environments where Wi-Fi signals may not be available or reliable, such as in underground parking garages or industrial settings [35].
There are two main approaches to Bluetooth-based localization: proximity-based and triangulation-based.
i) Proximity-based: This approach involves placing Bluetooth beacons at known locations throughout the environment, and using the RSSI of the beacons to estimate the distance between the device and the beacons. When the device is within a certain range of a beacon, it is considered to be in proximity of that beacon. This approach is simpler and less computationally intensive than triangulation-based methods, but may be less accurate.
ii) Triangulation-based: This approach involves measuring the RSSI values from at least three Bluetooth beacons, and using these measurements to calculate the device’s location using triangulation algorithms. Triangulation-based methods can be more accurate than proximity-based methods, but require more complex algorithms and may be more computationally intensive.
6.2 Bluetooth-Based Localization Based on Deep Learning
DL can be applied to enhance the accuracy and resilience of Bluetooth-based localization systems. By utilizing machine learning (ML) algorithms trained on RSSI data, predictions about the device’s location can be made. This approach proves valuable in environments where signal strength may be impacted by interference or obstacles. Notably, Bluetooth Low Energy (BLE) has gained prominence in smartphone-based localization. Smartphones equipped with BLE technology can leverage this capability in various settings such as airports, train stations, large markets, malls, and restaurants. In these scenarios, the smartphone receives the area map, and BLE-based localization is performed to determine the device’s position [36,47,70]. One of the advantages of Bluetooth-based localization is the low power consumption of Bluetooth beacons, which can allow for long battery life and reduced maintenance costs [73]. However, Bluetooth-based localization may require more beacons than other methods to achieve the same level of accuracy, which can increase the cost of the system. Additionally, Bluetooth-based localization may not be as widely available or as commonly supported by devices as Wi-Fi-based localization [46].
An IEEE 802.15.4-based wireless communication protocol is used by ZigBee. It is distinguished by its ability to operate at low data rates and power levels. ZigBee enables smooth communication between devices by utilizing a variety of ISM (Industrial, Scientific, and Medical) radio frequencies, including the 2.4 GHz band in other areas, the 915 MHz band in the USA and Australia, and the 868 MHz band in Europe [55,74]. ZigBee is often used in Internet of Things (IoT) applications, including those for smart cities, healthcare, industrial automation, and home automation [75]. The technology adopts a mesh networking topology, enabling devices to communicate with one another and transmit data through intermediate nodes. This creates a self-healing network that can overcome obstacles and interference [76]. Moreover, ZigBee is designed to prioritize reliability, security, and power efficiency.
However, since ZigBee shares the 2.4 GHz frequency band with other devices like Bluetooth and Wi-Fi, there may be potential interference issues [37]. To tackle this challenge, frequency hopping spread spectrum (FHSS) technology can be utilized to avoid interference and enhance network reliability. ZigBee’s robust characteristics make it a suitable choice for IoT applications that demand low power consumption, high reliability, and secure communication [77]. In terms of ZigBee’s suitability for IoT applications, it is worth noting that while ZigBee offers robust features, potential interference arises from sharing the 2.4 GHz frequency band with other devices like Bluetooth and Wi-Fi. As a remedy, using FHSS technology can mitigate interference, enhancing network reliability in IoT scenarios demanding low power consumption, reliability, and secure communication.
7.1 Bluetooth-Based Localization Based on Deep Learning
ZigBee-based localization typically involves using a network of ZigBee nodes or beacons to transmit signals that can be used to determine the location of other ZigBee devices within the network [78]. The ZigBee nodes can be placed throughout the space in a known configuration, and the signal strength and timing of the signals received by the other ZigBee devices can be used to calculate their position relative to the nodes [79].
There are a variety of algorithms that can be used for ZigBee-based localization, including triangulation, fingerprinting, and probabilistic methods. The choice of algorithm depends on the specific application and the accuracy requirements for the localization [80]. ZigBee-based localization has many potential applications, including asset tracking, indoor navigation, and safety monitoring. However, it is important to note that there are some limitations to the technology, such as the need for a relatively dense network of nodes to achieve high accuracy, and the potential for signal interference in certain environments [81].
7.2 Bluetooth-Based Localization Based on Deep Learning
One approach to ZigBee-based localization using DL is to use a deep neural network to learn the mapping between the RSSI values of ZigBee beacons and the locations of those beacons [82]. The RSSI values can be obtained from ZigBee nodes placed at known locations, and the deep neural network can be trained on this data to learn the relationship between RSSI values and locations. Once the network is trained, it can be used to predict the location of a ZigBee node based on its RSSI values [83]. Another approach is to use a CNN to directly process the ZigBee signals and extract features that can be used for localization. In this approach, the ZigBee signals are first pre-processed to extract relevant features, and then these features are fed into a CNN for localization [84]. This approach can be more computationally efficient than the first approach, as it does not require the training of a separate mapping function [85,86]. Overall, ZigBee-based localization using DL has the potential to provide accurate and efficient localization in various applications, and it is an active area of research [87]. However, there are still many challenges that need to be addressed, such as the need for large amounts of labeled data, the effect of interference and noise on the signals, and the scalability of the approach to large-scale networks [88].
Researchers in [12] introduced an energy-efficient indoor localization technique named ZIL that utilizes ZigBee technology. The ZIL technique incorporates the ZigBee interface to collect Wi-Fi signals, aiming to reduce the impact of signal interference. Another research work by [89] introduced a proximity learning-based ZigBee localization algorithm. This algorithm differs from traditional triangulation-based methods by offering faster computation time while maintaining accurate location estimation.
Ultra-Wideband (UWB) technology is a wireless communication technology that operates at very high frequencies and uses very low-power pulses that spread over a large bandwidth [90]. The large bandwidth of UWB technology allows it to transmit a large amount of data over a short distance, typically within a few meters, with high accuracy and low power consumption. UWB is often used for high-speed wireless communication, precise location tracking, and radar applications [91].
UWB is a wireless communication technology, which emits short UWB pulses (2 ns each) to track and locate a UE equipped with the UWB feature [92,93]. This technology transmits data across a wide bandwidth of 500 MHz without interference from the conventional narrowband and carrier wave transmission in the same frequency band. Once a UWB-enabled device is within the range of another, the devices start “ranging.” Ranging is used by the UWB-enabled devices to determine the time of flight (TOF) of transmission at diverse frequencies. These characteristics enable it to combat multipath fading [94,95]. TOF is the time taken for a signal transmitted from a UE to travel to another UE. Once the TOF is obtained, the range of separation between the UEs can be calculated based on the TOF and the known propagation speed of the signal [96,97]. UWB technology is crucial for wireless communication and precise location tracking. In the following sections, the work explores its diverse applications and its contribution to the research.
8.1 Ultra-Wideband-Based Localization
Ultrasound-based localization is a technique that uses ultrasound waves to locate and track objects or structures in real-time. It is a non-invasive and safe technique that has many applications in medicine, including fetal imaging, Musculo-skeletal imaging, and cardiac imaging. The basic principle of ultrasound-based localization is that ultrasound waves are transmitted into the body, and then the waves are reflected by the structures inside the body [98]. By analyzing the reflections, the location and movement of the structures can be determined. Ultrasound imaging can provide high-resolution images of structures inside the body, making it a valuable tool for locating and tracking objects [99].
In medical applications, ultrasound-based localization is commonly used for fetal imaging. It allows doctors to track the position of the fetus and monitor its development during pregnancy. Ultrasound imaging is also used in musculoskeletal imaging to locate and track the movement of tendons, ligaments, and muscles [100]. In cardiac imaging, ultrasound can be used to track the movement of the heart and detect abnormalities in its function. Ultrasound-based localization has also been used in other fields, such as robotics and navigation. In robotics, ultrasound sensors can be used to detect obstacles and locateobjects in the robot’s environment. In navigation, ultrasound sensors can be used to track the position and movement of vehicles and aircraft [101]. Overall, ultrasound-based localization is a valuable technique that has many applications in medicine and other fields. Its non-invasive and safe nature, combined with its ability to provide high-resolution images and real-time tracking, makes it a powerful tool for locating and tracking objects and structures in a variety of applications [59].
8.2 Review of Recent Literature on Ultra-Wideband-Based Localization Based on Deep Learning
A hybrid localization strategy that combines Wi-Fi and UWB (Ultra-Wideband) technologies is proposed by the authors in [102]. UWB beacons are included in the current Wi-Fi infrastructure to do this. The hybrid approach uses UWB accuracy for its algorithm and benefits from the availability of Wi-Fi infrastructure, which lowers expenses. The localization inaccuracy was therefore limited to a maximum of 20 cm. A small number of tags can only be localized by conventional UWB systems. SnapLoc, a UWB localization system, was released in [103] and it can localize an infinite amount of tags. The effectiveness of the UWB localization system was examined for both Line-ofSight (LOS) and Non-Line-of-Sight (NLOS) scenarios in different research [104]. Linearized Least Square Estimation (LLSE), Fingerprint Estimation (FPE), and Weighted Centroid Estimation (WCE) were the three methods used for position estimation. According to the findings, LLSE had the worst performance, while FPE revealed the greatest. A feature-based solution using a deep Long Short-Term Memory (DLSTM) algorithm was presented by [105] for UWB localization. They were able to obtain a mean localization error of 0.05 meters by extracting characteristics from the user’s distance information and using the DLSTM algorithm. Similar to this, Feng et al. [106] suggested a deep Gated Recurrent Unit (DGRU) algorithm that makes use of time series information collected from the UWB channel. Their simulation findings demonstrated that the suggested GRU-based localization approach outperformed their proposed CNN-based localization method, achieving a Root Mean Square Error (RMSE) of 0.8 meters. Finally, a neural network structure based on the deep Autoencoder-Back-propagation (DAE-BP) algorithm was suggested in the works of [107,108]. To overcome the difficulty of indoor localization with high precision, this technique used the Time Difference of Arrival (TDOA) data from UWB received signals.
9 Radio Frequency Identification
The term RFID designates a two-part wireless communication system. Readers and tags are the names of these components. A device containing one or more transceivers that send and receive radio signals is the reader [7]. Tags, on the other hand, are items with specific data encoded within them. They convey this knowledge to surrounding readers incessantly. There are two different kinds of tags: Active RFID tags, which contain batteries, and passive RFID tags, which are powered by the signals sent to them [109]. Hence, the following section will discuss RFID components’ specific characteristics and applications.
9.1 Radio Frequency Identification Localization
RFID Localization is a technology used to locate or track objects or people using radio frequency signals. RFID technology typically consists of two components: A reader and a tag. The reader emits radio waves, which are received by the tag, causing it to transmit a unique identifier back to the reader [110]. The reader then uses this identifier to determine the location of the tag. Localization using RFID technology can be achieved through various methods, such as signal strength, time of flight, or phase difference measurements. These methods enable the reader to calculate the distance between itself and the tag, and by using multiple readers, the location of the tag can be determined through triangulation [111].
RFID localization has a wide range of applications, including inventory management, asset tracking, and indoor navigation. It can be used in various industries such as healthcare, logistics, and manufacturing to improve efficiency, reduce costs, and enhance safety. However, it is important to note that RFID localization technology has limitations, such as its reliance on radio signals, which can be affected by interference and obstacles.
9.2 Radio Frequency Identification Localization Based on Deep Learning
Training a neural network to identify patterns in the data gathered by RFID readers is required for RFID localization based on DL. The signal intensity of the radio waves that the RFID tags generate is measured by the RFID readers, and this information is utilized to pinpoint the tag’s location. Utilizing a CNN is one method of applying DL for RFID localization. A CNN is a particular kind of neural network that is excellent for image processing jobs. The signal strength data gathered by RFID readers may be compared to a picture in the context of RFID localization, where the x and y coordinates denote the reader’s position and the color denotes the signal intensity [3]. A dataset with samples of the signal strength data gathered at various places is required to train the CNN. After then, the CNN is taught to spot patterns in the data connected to certain places. Once trained, the CNN can utilize the signal strength information gathered by the RFID readers to anticipate where RFID tags will be located. This may be carried out in real-time, enabling the ongoing tracking of items having RFID tags.
In [112], the researchers employed the RSS values from RFID as unique identifiers (fingerprints) for Reference Points (RPs) during the offline phase. In the online phase, they utilized a modified version of the Kalman filter, incorporating phase shift data extracted from RFID, to retrieve information about previous states. In a separate study conducted by [113], the authors explored localization using three different sensor pairs: An infrared sensor pair, an RFID reader with tags, and a combination of a Light-Emitting Diode (LED) and a light resistor. The results revealed that RFID-based localization exhibited superior accuracy and stability compared to the other sensor types.
Thus, the following section will look at some of the signal metrics frequently utilized for localization in this section.
RSS is a measurement of the power level of a received radio signal, typically expressed in decibels (dBm) or milliwatts (mW). It is an important metric for evaluating the quality and reliability of wireless communication systems, particularly in situations where the signal may be subject to interference or attenuation [1]. This is mathematically given as:
where Pref is the reference Power, and Pr is the received power given as:
The second equation shows that:
Nevertheless, multipath effects and diffraction phenomena have an impact on the RSS in settings like a residential room. Because of this, the representation of RSS is highly non-linear, and in real-world settings like the space under consideration, its relationship concerning distance is unknown. The sent signal in wireless communication systems travels through the air and can be impacted by many things, including distance, barriers, and environmental conditions. This might cause mistakes and data loss since the received signal intensity at the receiver might be lower than the broadcast signal [1].
To mitigate these effects, wireless systems often use techniques such as power control, channel coding, and error correction to improve the reliability of the communication link. A crucial step in assessing the efficiency of these strategies and improving system performance is measuring the received signal strength. In real world applications, signal analyzers or spectrum analyzers can be used to measure RSS. With methods like triangulation or fingerprinting, which depend on measuring the RSS at several points in space, the RSS measurement can also be used to locate a wireless device.
10.2 Deep Learning Localization Using Received Signal Strength
DL can be used for indoor localization using RSS measurements. RSS is the power level of a signal received by a wireless device from a transmitter, such as a Wi-Fi access point or Bluetooth beacon. The RSS can be used to estimate the distance between the transmitter and the receiver, and this information can be used to determine the location of the receiver. To use RSS for localization, a DL model can be trained to predict the location of a device based on the RSS measurements received from multiple transmitters. The model takes as input the RSS measurements from the different transmitters and outputs the location of the device.
One approach to DL-based RSS localization is to use a CNN. The CNN can be trained on a dataset of RSS measurements and corresponding device locations. The input to the CNN can be a matrix of RSS measurements from multiple transmitters, and the output can be a vector representing the device’s location [114]. Another approach is to use RNN or Long Short-Term Memory (LSTM) networks [115]. These networks are suited to sequential data such as RSS measurements, as they can model the temporal dependencies between the measurements.
One of the challenges in DL-based RSS localization is the variability in the RSS measurements due to factors such as interference, multipath propagation, and obstacles in the environment. To overcome this challenge, techniques such as signal processing, data augmentation, and transfer learning can be used. DL-based RSS localization has been used in various applications such as asset tracking, indoor navigation, and smart building management. With the increasing adoption of IoT and smart building technologies, DL-based RSS localization is expected to become even more prevalent.
CSI is a term used in communication systems to refer to information about the transmission channel that is available at the receiver. This information can be used to optimize the transmission of data over the channel, by adjusting the modulation, coding, power and other parameters of the transmitted signal. The flowchart of the CSI localization process is shown in Fig. 4. In wireless communication systems, the channel can vary over time due to factors such as fading, interference, and mobility of the transmitter and receiver. Therefore, having accurate CSI is crucial for efficient and reliable communication [116]. The traditional category and the explanation are given in Fig. 5. The use of machine language can improve the accuracy and robustness of a system which further leads to the reduction of cost.
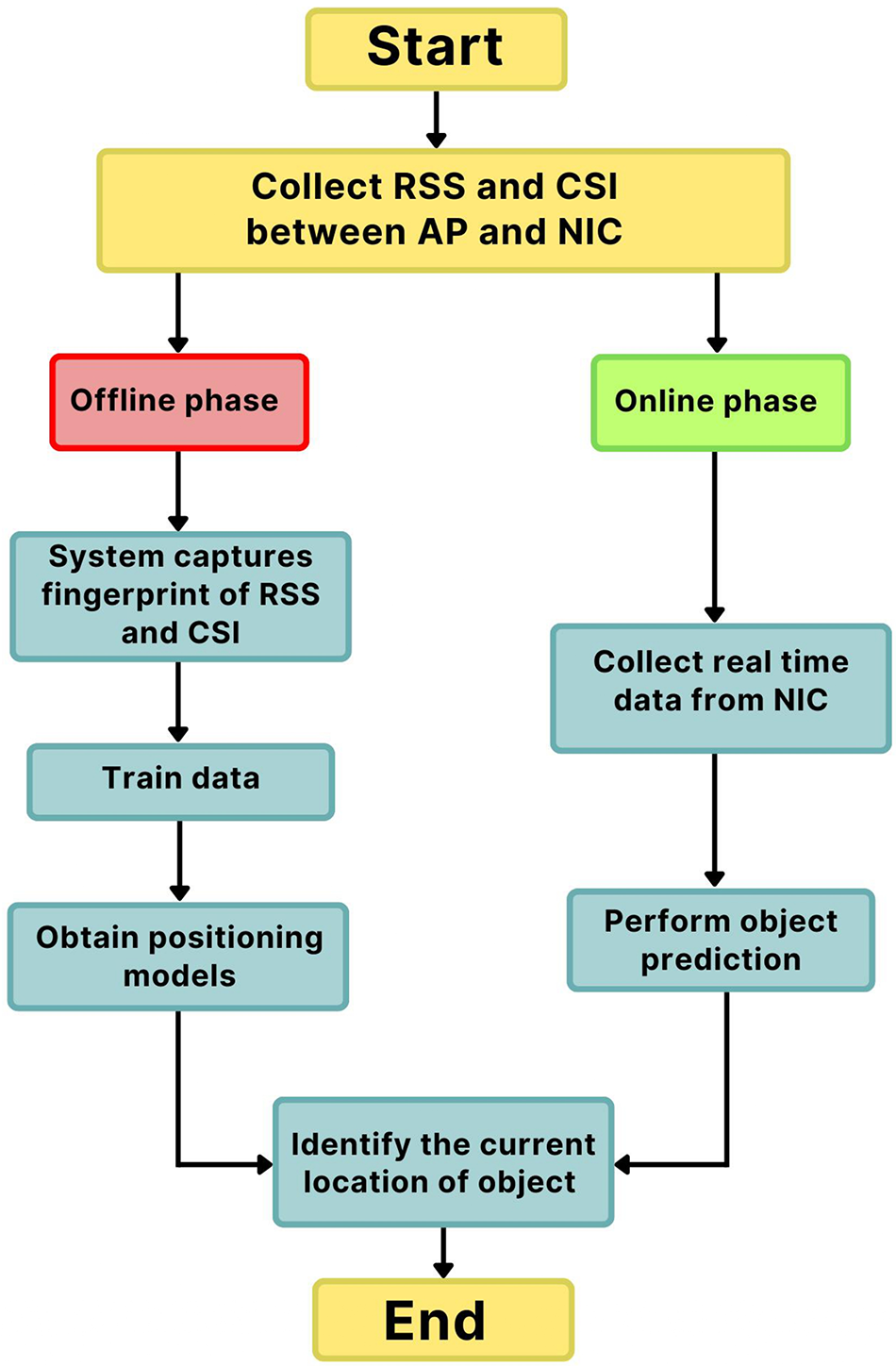
Figure 5: Flowchart for the localization process
CSI can be obtained using various techniques, such as training sequences, pilot symbols, and feedback from the receiver. In training sequence-based techniques, known data is transmitted by the transmitter and the receiver uses it to estimate the channel response. In pilot symbol-based techniques, special symbols are inserted into the data stream, which is used by the receiver to estimate the channel response. In feedback-based techniques, the receiver sends information about the channel back to the transmitter, allowing it to adapt the transmission parameters accordingly. Once CSI is obtained, it can be used for various purposes such as adaptive modulation and coding, beamforming, and power control. Adaptive modulation and coding refer to adjusting the modulation and coding scheme of the transmitted signal based on the channel quality, to maximize the data rate while maintaining a certain level of error rate. Beamforming refers to adjusting the direction of the transmitted signal to maximize the received signal strength at the receiver. Fig. 6 presents the traditional machine learning-based CSI positioning algorithm. Power control refers to adjusting the transmit power to optimize the signal-to-noise ratio at the receiver. Power control refers to adjusting the transmit power to optimize the signal-to-noise ratio at the receiver [117]. The DL-based methods can extract CSI data properties and locate functions that exist between the location and data. Fig. 7 shows some DL-based algorithms for object localization. Thus, CSI is pivotal in optimizing communication systems. Accurate CSI is essential due to the dynamic nature of wireless channels. The subsequent subsection delves into the various techniques used to obtain CSI. It highlights its applications in adaptive modulation, beamforming, and power control, ultimately introducing data-driven, deep learning-based methods for object localization.

Figure 6: Traditional machine learning-based CSI positioning algorithm
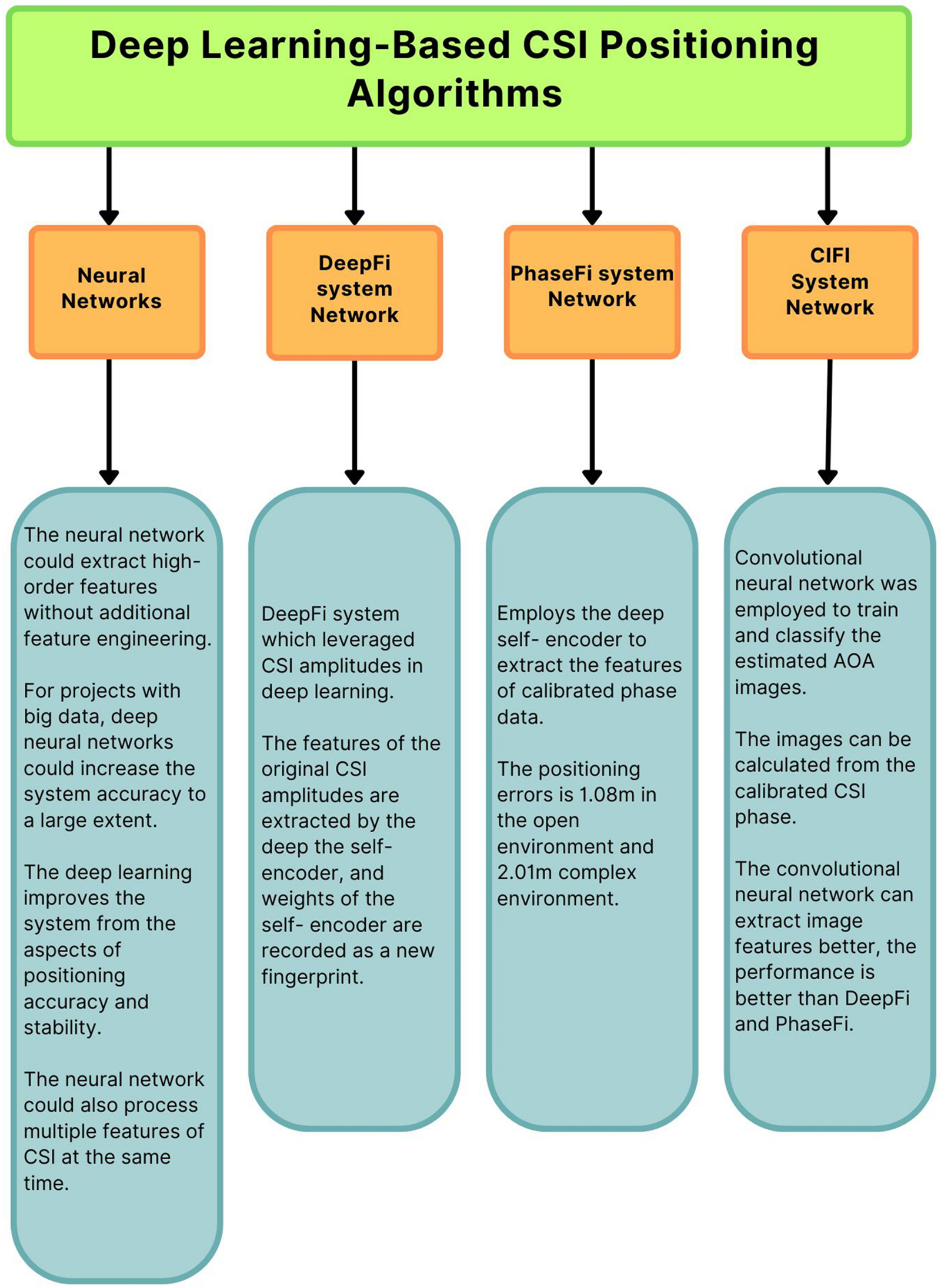
Figure 7: Deep learning-based CSI positioning algorithms
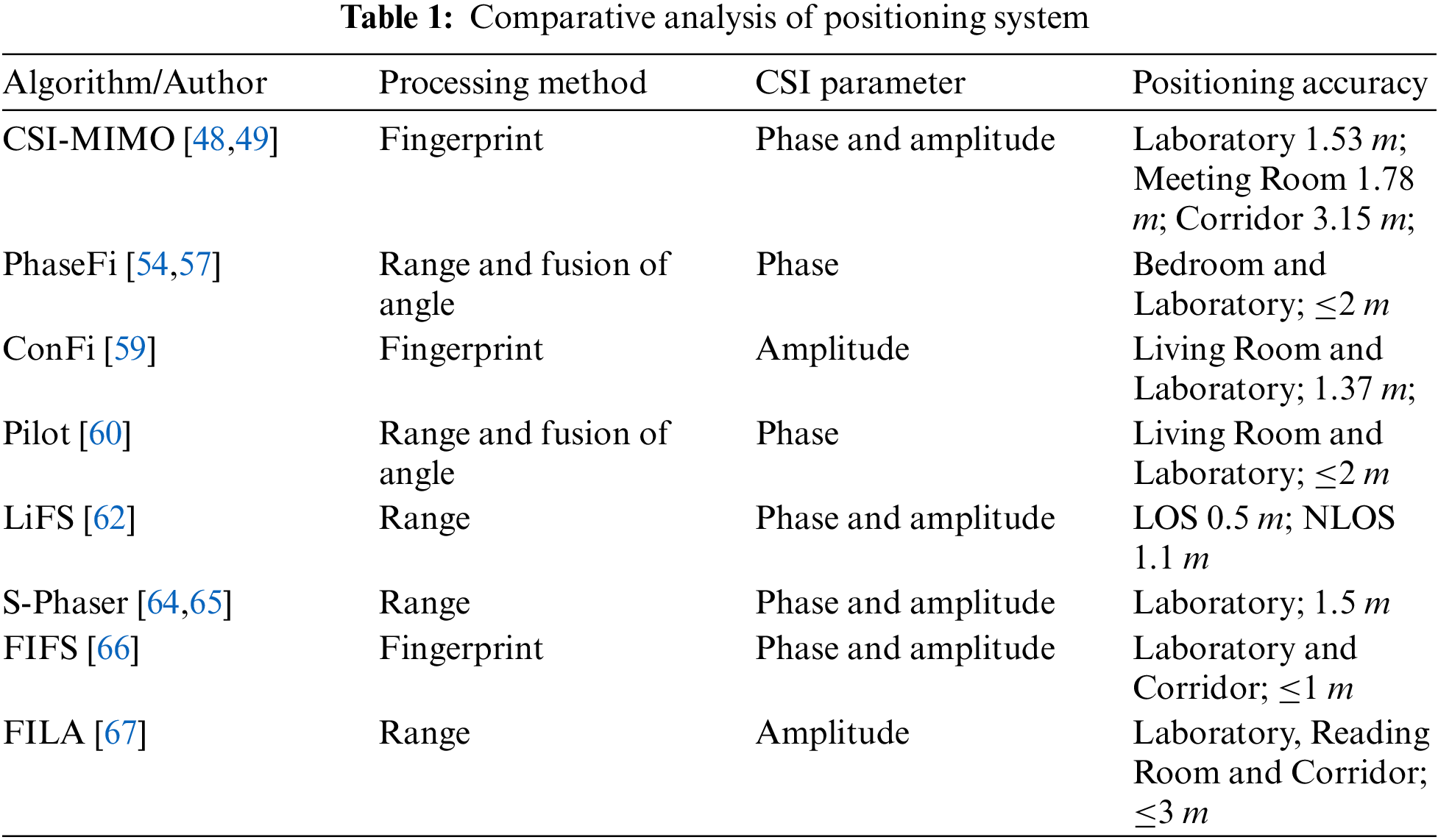
Furthermore, Table 1 is a comparison of different positioning algorithms by several authors. From the table, it can be observed that there exist different methods and CSI information for achieving object positioning.
The majority of radio wave transmissions are prone to multipath effects. As a result, signals received are a superposition of signals from many paths. The CSI uses Channel Impulse Response (CIR) to distinguish multipath signals. In a system whose input-output characteristics do not change with time [1,118] the CIR is given as:
where ai, τi, θi represents the amplitude, time delay, and phase angle of the ith transmission path, respectively, N is the total number of paths, δ is the impulse function, and n(τ) is the Gaussian noise.
Unfortunately, CIR cannot be accurately measured on standard commercial equipment. To address the challenge, the channel frequency response (CFR), which comprises amplitude response and phase response in the frequency domain, is frequently employed to represent the channel to get around this restriction. As shown in the work of [1].
11.1 Deep Learning Localization Using Channel State Information
DL can also be applied to indoor localization by leveraging CSI. CSI represents a vector that captures the characteristics of a wireless signal’s multipath propagation during its transmission from a transmitter to a receiver. It encompasses details about the signal’s amplitude and phase, which can be utilized to determine the receiver’s location [106]. To employ CSI for localization, a DL model can be trained to predict the device’s location based on the CSI measurements received from multiple transmitters. The model takes CSI measurements from different transmitters as input and outputs the device’s location [1,119].
One approach to DL-based CSI localization is the use of CNNs. These CNNs can be trained on a dataset consisting of CSI measurements and corresponding device locations. The input to the CNN can be a matrix of CSI measurements from multiple transmitters, while the output can be a vector representing the device’s location [114,120]. Another approach involves the use of RNNs or Long Short-Term Memory (LSTM) networks. These types of networks can effectively model the temporal dependencies between the CSI measurements, which can be beneficial for localization [115]. One of the advantages of utilizing CSI for localization is its resilience to interference and multipath propagation. Compared to Received Signal Strength (RSS), CSI provides more precise localization by capturing detailed information about the wireless signal [1,121]. However, a challenge in using CSI lies in the complexity of the measurements, which may require specialized hardware and software for collection and processing.
Applications of DL-based CSI localization include asset tracking, smart building management, and indoor navigation. With the increasing adoption of IoT and smart building technologies, DL-based CSI localization is expected to become more prevalent in the future. To improve indoor localization and overcome the aforementioned issues, various research studies have used DNNs. For instance, during the offline positioning phase, references [122,123] produced noise-free RSS training data using a path-loss model. They used a probabilistic method known as Gaussian process regression to find consumers. The authors used the assumption that users would have access to enough RSS samples while they were online, protecting against minor fading. Reference [124] suggested an enhanced KNN method that accelerates the online search for nearby reference sites by using the weighted average of RSS samples. Small-scale fading is lessened and computations for KNN or kernel-based methods like Gaussian process regression are made easier by collecting the average from RSS samples during the offline phase [125]. Additionally, various DNN-based positioning techniques have been researched in recent years to cater to different localization objectives To discover the distribution of restricted data in a four-class problem, references [49,126] developed the generative adversarial networks DL approach. When employing the trained DNN model for localization, synthetic data produced using this method may be merged with actual data to improve overall localization accuracy. The reference in [127] described a self-calibration DL architecture using auto-encoders to reduce the effect of environmental changes on localization performance. The authors in [88] used a DNN to partition the region into four subareas, then an improved KNN method to pinpoint the spot. The authors in [127] used a DL framework and their correlations to reconstruct the fingerprints. A DNN-based method to automatically recreate the fingerprinting dataset in response to environmental changes was also suggested by [128].
Hence, the following section will highlight some of the significant challenges that indoor localization and its adoption face.
12.1 Multipath Effect and Noise
The presence of multipath effects poses a significant challenge in indoor localization. Signals encounter reflections, refractions, and diffractions from various objects such as walls, metals, and even people, resulting in complex signal behavior. Localization methods like ToF, RSSI, AoA and TDoA rely on these signals from the reference nodes (RN) or user devices to estimate the user’s location. However, in the presence of multipath effects, it is highly unlikely to obtain a single, direct Line of Sight (LoS) signal. Instead, the receiver receives multiple versions of the signal, each with different phases and power levels. This complexity has a notable impact on indoor localization, particularly in terms of accuracy. To achieve an accurate position estimate, it becomes challenging to collect the direct LoS signal and accurately determine the distance between the transmitter and receiver. Sophisticated signal processing techniques are necessary to detect the LoS signal, if present, and mitigate the effects of multipath signals. Although recent literature describes various advanced methods for multipath and noise suppression, their widespread adoption seems unlikely due to their complexity and reliance on higher processing capabilities typically available at the RN. Additionally, these methods may not be practical for user devices that have limited energy and computing resources. Consequently, there is a demand for optimized, energy-efficient, and effective multipath and noise suppression algorithms that can facilitate precise localization by utilizing the available signals.
Interior localization is significantly influenced by the characteristics of the interior environment. The dynamics of the environment, including the types of materials used for the walls and ceilings, the positioning of various obstacles, and the population of the space, all have a big influence on how well the system works. All of these factors must be taken into account while developing an accurate localization system. Most of today’s technologies are evaluated in controlled conditions, which might not be a replica of an indoor situation. A minimum of one LOS path must exist between the user and the RNs, according to the majority of the suggested systems. However, it is extremely likely that in big malls or little offices, there will not a LOS route between the user device and the RNs. Therefore, it is essential to precisely mimic the interior environment’s properties. All environmental factors, including the influence of people both during peak and off-peak hours of operation, must be taken into consideration by the model.
The energy efficiency of the localization systems is essential for their wide adoption. To provide greater precision and range, the majority of localization systems now in use need a disproportionately higher amount of energy. It can be challenging to achieve high precision without draining the device’s battery, particularly for localization systems. This is because to increase localization performance, a user device must regularly listen to a certain beacon message or signal. This requires the device to actively search the wireless channel for different signals. Technically speaking, this is conceivable, but it is not the most energy-efficient option. The main purpose of the majority of consumer electronics is not localization, therefore a low battery might make the user unhappy. Therefore, the energy consumption of the localization system must be optimized. While current research focuses on improving the precision of localization, it will soon be vital to also improve the systems’ energy consumption. To save energy, it would be advantageous to utilize less complex localization algorithms with great noise suppression efficiency. The computational component of localization can be moved from the user device to a nearby or cloud-based server utilizing DBL. These servers frequently have strong processors and reliable power sources. In these scenarios, real-time location updates must be sent to the user, hence latency or reaction time must also be increased.
Another significant barrier to the implementation of indoor localization is cost. Numerous current localization methods need the help of extra infrastructure, such as receivers, tags, pricey sensors, cameras, emitters, etc., which demands further investment. Additionally, large-scale localization is difficult and may call for specialized servers, databases, and proprietary software. Given the additional expense, the majority of clients and service providers would forego employing localization services. While cost is currently a big obstacle, it can be avoided by utilizing the already-existing infrastructure, such as Wi-Fi, cellular networks, or a combination of both.
The widespread adoption of localization services faces a significant obstacle in the form of privacy concerns. Many customers or users are hesitant to share information about their whereabouts due to the sensitivity of their location data and potential risks to their security and privacy [7]. Currently, most localization systems prioritize accuracy and effectiveness without adequately addressing privacy issues. However, in light of increasing cybersecurity concerns, researchers must tackle the significant challenge of privacy in indoor localization.
The prevalence of wearable devices and IoT gadgets collecting location data has heightened concerns regarding location privacy. A study illuminates the uniqueness of human mobility, emphasizing that a mere four randomly chosen spatio-temporal points suffice to identify 95% of individuals uniquely. This underscores the imperative to investigate privacy concerns within Indoor Positioning Systems (IPS). Disclosing location information can unveil sensitive data encompassing home addresses, corporate travels, medical clinic visits, client locations, and political event attendance. Consequently, the European Union has introduced the General Data Protection Regulation (GDPR) to safeguard citizens’ data [4–7]. The GDPR delineates personal data, including location data capable of directly or indirectly identifying a natural person. The regulation mandates the fair and transparent processing of personal data for its intended purposes, advocating for minimal data retention, secure storage, confidentiality, accuracy, and accountability. The essence of location information is encapsulated in a three-part tuple <identity, position, time> [129]. Even with removing the time component, users remain susceptible to privacy compromise based on spatial information, utilizing frequency as the sole determinant of the likelihood of revisits. Scholars propose personalized privacy settings based on prior social media privacy configurations to guide users in selecting appropriate Location Privacy Preserving Mechanisms (LPPM). Wi-Fi emerges as the predominant IPS technology, favored for its relative ease of implementation, particularly when employing fingerprinting. However, privacy concerns in Wi-Fi IPS manifest on two fronts. Suppose the Localization Server (LS) gains access to user measurements. In that case, it can clandestinely track users within a building, maintain historical location records, and disseminate this data to third parties unbeknownst to the user [130,131]. Conversely, if the LS shares its database and algorithms with users for self-location calculation, the LS forfeits its privacy and becomes susceptible to misuse by adversaries. This vulnerability is particularly disconcerting in military operations, hospitals, airports, and government offices. The widespread integration of IPS and location-based services (LBS) in personal devices like smartphones and wearables has intensified the demand for privacy and security measures. This paper examines diverse mechanisms to bolster location privacy on these devices, delves into prevailing trends, and scrutinizes potential avenues for future research [4,129–131].
The key question arises: How to ensure that users of localization services are protected from privacy problems and that their personal information remains private, secure, and solely used for appropriate purposes such as targeted advertising? Additionally, how can users trust the software and the company providing localization services? Resolving these privacy concerns requires addressing fundamental questions. Building trust between consumers and service providers and addressing security risks resulting from privacy breaches is essential for fostering the growth of localization services. Furthermore, the system needs to verify the legitimacy of new users requesting localization services to prevent rogue nodes with malicious intentions from infiltrating and compromising the system. Weak authentication mechanisms can lead to systematic attacks on the localization system, significantly impacting its overall performance.
To ensure user safety and provide enhanced services, new security and privacy protection measures need to be implemented. However, conventional centralized or distributed key-based systems, which are complex and resource-intensive, may not be suitable for energy-constrained devices. An effective privacy and security method should strike a balance between processing complexity, privacy, and security while minimizing energy consumption. Although these aspects pose distinct challenges, finding an optimal trade-off point is possible. An alternative approach is to design the system as a location support system rather than a location tracking system [132]. In a location support system, users have the freedom to discover services based on their location without explicitly disclosing their position to the system. Users determine their location concerning anchor points, granting them greater control over their privacy. Therefore, further investigation into privacy and security issues related to localization is of paramount importance.
12.6 Negative Perception of the Adopted Technology
To achieve the desired localization system, which depends on existing infrastructure like Wi-Fi APs to supply its services, it is critical to prevent any detrimental effects on the technology’s primary function of connecting users. As of now, localization is not taken into account in the design of Wi-Fi or other technologies. This implies that the usage of these technologies for localization will affect on other elements of them. Thus, localization systems should be created in a way that preserves the primary functioning of the technologies. To deliver indoor localization-as-a-service, this may necessitate changing the current standards to take localization into account [133].
The development of localization and proximity approaches is currently not supported by any standards or governing guidelines. There is not a single wireless technology that is usually regarded as the primary technology for the next localization systems.
Numerous various technologies and methodologies have been employed for the goal. Unfortunately, the majority of the systems are unconnected, and there is yet no ubiquity. This presents tough obstacles. Thus, localization needs to be properly standardized. A requirement can be established to narrow the technologies and processes that can meet the aforementioned evaluation criteria by standardization. Future communication technologies, such as 5G and beyond (B5G), must also consider the significance of this.
13 Emerging Indoor Localization Studies
The essence of the review is to bring to knowledge the current state-of-the-art as regards the area of the study and to bring to light the various challenges encountered by other researchers which will serve as the basis of this work. A variety of works has been done to improve the localization services of any technology. For instance, references [32–36,130] developed a robust and accurate cellular-based indoor localization via DL. This was done to meet up with the demand for general coverage and enhanced indoor localization. The work was able to achieve better accuracy by using cellular technology. In the work, the non-linear relation that exists between a mobile phone user and its location is captured. In the process of achieving this, the authors made use of DL to model the dependent relationship between varying base station signals in a given area which unveils its advantage for better localization. Simulation results showed an improved localization accuracy having a median of 0.78 m and an enhanced power-saving capability. However, the position accuracy is best suited for outdoor positioning as the indoor localization performance was minimal. To further improve object localization, references [46,73–75] examined a machine learning-based indoor localization scheme by making use of Wi-Fi RSSI fingerprint. The work was focused on providing a well-explained investigation of machine learning that is based on Wi-Fi RSSI. The study showed that several schemes can be used for localization. They included; ML-based prediction models, RNN, data processing models and data argument schemes. The performance of these schemes was compared. The result of the survey showed that the ML algorithm can improve indoor object localization using Wi-Fi RSSI fingerprint. However, due to the presence of interference, there is a need to further improve the accuracy of the positioning fingerprint scheme. Another form of Wi-Fi package termed Software Defined Radio-Fi was proposed by [76]. This is thus far the first Software Defined Radio (SDR) Wi-Fi software receiver that is aimed at enhancing indoor positioning by using CSI measurements as features for DL classification. The measurement process was carried out by using a LabVIEW-based SDR antenna receiver platform. In the study, the CSI data was measured from pilot-based beacon frames from a defined access point. To ensure enhanced indoor cluster accuracy, the type of neural network considered in the studies includes 1D-CNN and a Feed-Forward Neural Network (FFNN). The work also made use of DL classification as compared with the traditional RSS-based systems. Results from the study showed that the use of DP-based classification outperformed the existing RSS-based positioning methods. However, the performance can still be further improved due to the obstacle peculiarities of indoor positioning which may result in more overhead in getting the accurate position of an object. In an attempt to solve the overhead problem, references [32,35] developed a ubiquitous, robust and low-overhead DL-based indoor localization scheme that makes use of limited cellular information. The demand for large coverage and enhanced indoor localization of objects in recent years demands enormous base station (BS) infrastructures. The increase in infrastructure is not cost-effective for most service providers and as such fewer infrastructures a built which is not good if effective localization is to be carried out. Hence, the authors developed a novel cellular-based indoor localization system that takes advantage of the short-term history of signal strength from only the associated BS. The algorithm was deployed by making use of an Android phone and the result from the simulation showed that the developed algorithm improved the localization accuracy in an indoor environment. However, the collaboration between associated BS could lead to interference, which may lead to error.
Furthermore, to ensure an accurate and robust indoor localization system using DL, references [37,77–79,131] developed a WiDeep and frequency hopping algorithm that was focused on improving the accuracy of measurements of CSI data during localization. The authors took advantage of the availability of Wi-Fi in an indoor environment to enhance Wi-Fi fingerprinting. However, the noise and instability problem with the use of Wi-Fi mitigates the possibility of having accurate localization of objects in an indoor environment.
In an attempt to solve this problem, the authors made use of a DL-based indoor localization system that was able to enhance the localization process by ensuring a robust object positioning process. This was possible because WiDeep employed a stack of autoencoder DL-based models which is a probabilistic framework for handling noise in the network. Results from the simulation showed that the proposed system improved the localization process. However, the system suffered from high computational complexity which makes the localization process long and thus time inefficient. In addition, [80–84] also developed a passive and Wi-Fi-based fingerprint framework for indoor localization. The authors proposed a CNN-based indoor localization framework for multi-floor and building localization. A novel classification model was developed by combining Sparse Autoencoder (SAE) with 1D CNN and Mixture Density Networks (MDN). Simulation results confirmed that the novel scheme improved both floor and building localization. However, the inherent noise in the indoor environment made the classification cumbersome.
The authors in [86] also proposed a local connection-based DNN for indoor localization. The authors first validated the correlation between adjacent sub-carriers and introduced the position-dependent local (PDL). The work made use of both global and local information of CSI amplitude for fingerprint localization. The result from the simulation shows that the performance of the system for localization process was more accurate when compared to other existing schemes. The drawback of the study was that the use of CSI limited some location data that would have increased the level of accuracy obtained by the authors. Also, the proposed local connection-based CSI was computationally complex which may not be good for error free location analysis.
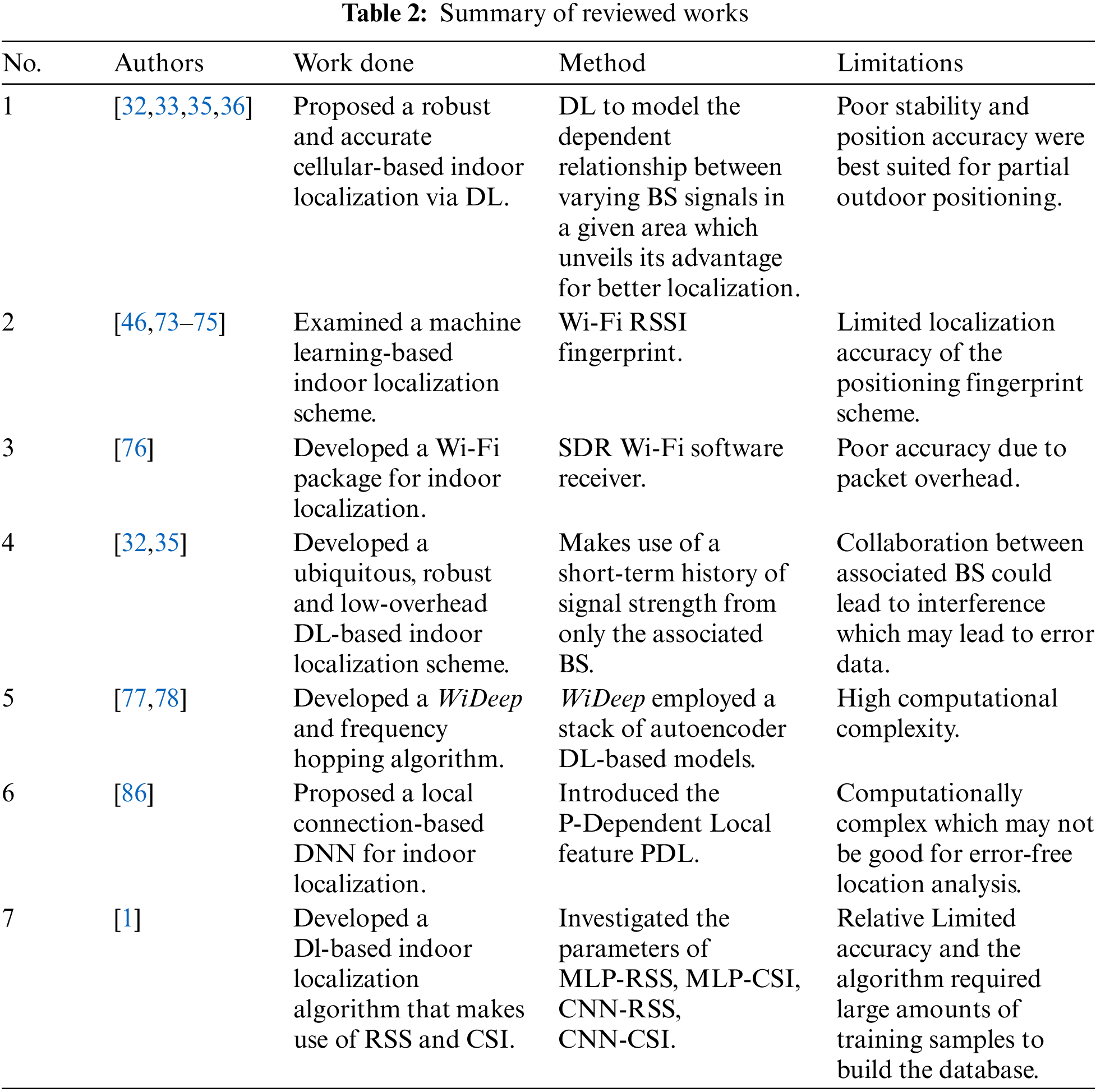
In a bid to further ensure a noise-free and accurate localization process, references [1,134,135] developed a DL-based indoor localization algorithm that makes use of RSS and CSI transmission quality metrics. A room plane was used from the analysis which was further portioned into two dimensional blocks or classes. The localization process was defined as a classification problem. The authors investigated on the parameters of Multilayer Perceptron (MLP)-RSS, MLP-CSI, CNN-RSS, and CNN-CSI. To locate the position of an object in the room, the authors developed four deep neural networks which were implemented with 1D CNN and multi-layer perception. Experimental results showed that the localization process was efficiently done with less system complexity. However, the algorithm requires large amounts of training samples to build the database. Table 2 gives a summary of the details of the review carried out in this study.
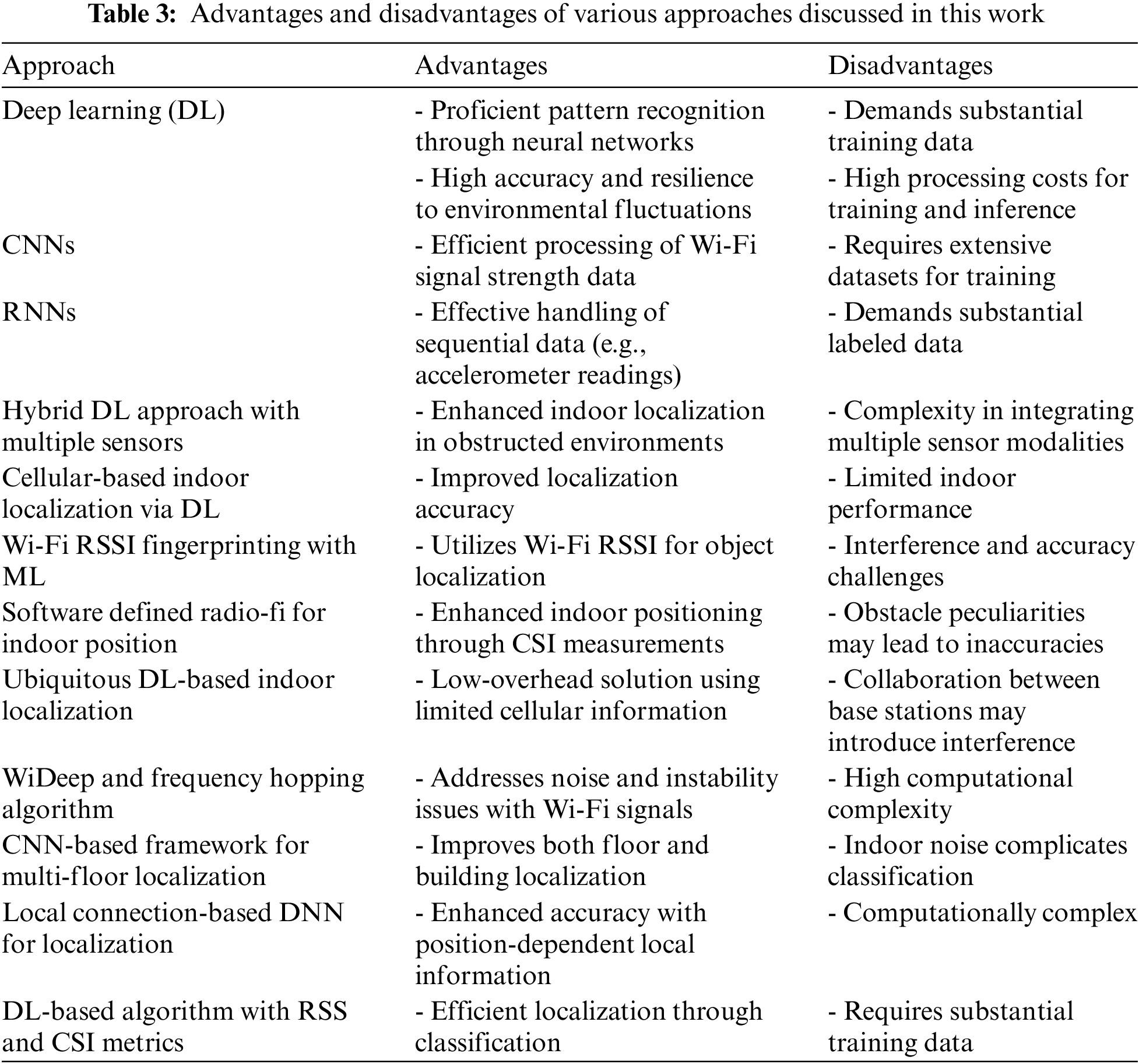
From the review carried out, it can be observed that most of the works focus on improving the localization process of objects in indoor environments. The authors made use of the DL algorithm to generally improve the accuracy and stability of object localization. From the works, it can be observed that there is improvement in the localization process in an indoor environment. However, there is a need to further improve the process of localization by considering other signal parameters such as RSI, RSS, and CSI to ensure a highly accurate localization process, especially in an environment that has lots of obstacles that may mitigate accurate localization of objects. Table 3 also, summarizes the advantages and the disadvantages of the different approaches presented in this work.
Because of this, this research work aims at developing a hybrid deep learning based scalable device-free indoor localization algorithm using received signal information and channel state information.
Indoor localization is a crucial area with many applications, such as navigation, asset tracking, and security. However, this field faces persistent challenges that demand a comprehensive solution. The selection of a suitable localization method depends on several factors, such as the dynamic environmental conditions, the required precision levels, and the intricate trade-offs between cost and complexity [1].
DL, a subset of Machine Learning (ML) techniques, has harnessed the capabilities of Artificial Neural Networks to discern intricate patterns within data, earning widespread recognition across various domains such as computer vision and natural language processing [11]. DL has garnered substantial attention in indoor localization due to its remarkable potential. DL-based techniques leverage sensor data from sources like Wi-Fi, Bluetooth, and accelerometers to train neural networks, subsequently enabling precise user positioning [12]. These innovative methods exhibit remarkable accuracy and resilience when faced with the fluctuations that indoor environments often present, surpassing traditional localization approaches [13].
CNNs have found prominent roles in processing Wi-Fi signal strength data, entailing the training of networks on extensive datasets comprising Wi-Fi signal intensity measurements along with their corresponding spatial coordinates. Once trained, these networks adeptly identify device locations based on Wi-Fi signal assessments, providing valuable insights into indoor localization [14]. RNNs handle sequential data, such as accelerometer readings. They are trained on datasets that include accelerometer data alongside corresponding positions, enabling RNNs to predict device locations based on accelerometer data [15]. The adoption of DL in indoor localization techniques introduces notable advantages, including the capacity to handle intricate data, deliver exceptional precision, and demonstrate robustness against environmental variations [16].
While DL-based indoor localization techniques indeed exhibit distinct advantages over conventional methods, such as their proficiency in managing complex data, achieving remarkable precision, and withstanding environmental fluctuations [17], it is imperative to acknowledge their associated limitations. These limitations encompass the demand for extensive training data and the elevated processing costs associated with training and inference stages. Nonetheless, DL-based indoor localization techniques continue to exhibit promise, with the potential for an even more significant role as sensor data availability expands [17,18].
The present study contributes comprehensively to the discourse on DL applications in indoor positioning, focusing on the pivotal roles of CNNs and RNNs. In contrast to previous research, which predominantly concentrated on individual sensor modalities like Wi-Fi or Bluetooth, our investigation explores the integration of multiple sensor modalities, including Wi-Fi, Bluetooth, Ultra-Wideband, and ZigBee. This multipronged approach enhances indoor localization, particularly in complex and obstructed environments. Our study diligently addresses the challenges concerning object localization precision and stability by introducing a novel hybrid DL approach that leverages RSI, RSS, and CSI data. This innovative algorithm facilitates device-free indoor localization, a valuable feature for tracking objects or individuals not actively participating in the localization process. It is designed to meet the escalating demand for location-based services while acknowledging the complexities of DL-based indoor localization, such as multipath interferences and data standardization. Our research presents a significant advancement in indoor positioning by proposing an adaptable, device-independent, and multifaceted DL algorithm. Thus, this contribution will pave the way for future advancements in location-centric services.
In recent years, the importance of indoor localization has grown significantly, driven by the increasing reliance on location-based services for diverse applications. The accuracy and reliability of indoor positioning systems have substantially improved by applying DL-based approaches. DL models efficiently capture intricate correlations between sensor data and indoor locations, harnessing the power of ML and neural networks. This, in turn, results in highly accurate and dependable location data. While DL-based indoor localization offers substantial benefits, particular challenges persist, including mitigating multipath effects and noise, data standardization, the scarcity of labeled datasets, and the need for real-time performance. As the demand for location-based services continues to rise, further advancements in this field are anticipated.
To improve indoor localization accuracy, recent studies explored innovative approaches. For instance, references [32–36,130] have created a precise indoor localization system using cellular technology for accurate and wide-ranging coverage. Cellular technology has enabled successfully capturing the nonlinear correlation between mobile phone users and their locations. Deep learning models have been employed to model the intricate relationship between different base station signals within a specific area, highlighting their potential for improving localization accuracy. However, these systems may perform better for outdoor positioning than indoor environments.
Moreover, to enhance object localization, references [46,73–75] have investigated machine learning-based indoor localization schemes that rely on Wi-Fi-RSSI fingerprints. The studies conducted thoroughly analyze different machine learning techniques, such as ML-based prediction models, RNNs, data processing models, and data augmentation strategies. The findings suggest that ML algorithms can enhance indoor object localization using Wi-Fi RSSI fingerprints. However, some challenges still need to be addressed, particularly concerning interference, which can impact the accuracy of positioning fingerprints.
Furthermore, references [76] introduced a novel approach called Software Defined Radio-Fi, which utilizes CSI measurements as features for DL classification in indoor positioning. The method uses LabVIEW-based SDR antenna receivers for measuring CSI data from pilot-based beacon frames transmitted by access points. The research investigates the benefits of DL classification compared to conventional RSS-based systems. The findings indicate that the DL-based approach performs better, although it may face additional complexity due to obstacles in indoor positioning.
To reduce overhead, references [32–35] developed a robust and low-overhead DL-based indoor localization scheme utilizing limited cellular information. This approach addresses the need for improved indoor localization without extensive base station infrastructures. The simulation results confirm that this novel algorithm enhances localization accuracy within indoor environments, although collaborative interference among associated base stations remains a consideration.
To ensure accurate and robust indoor localization using DL, references [37,77–79,131] have introduced WiDeep coupled with a frequency hopping algorithm to improve the accuracy of CSI data measurements during localization. This innovative approach capitalizes on the availability of Wi-Fi in indoor settings to enhance Wi-Fi fingerprinting. However, noise and instability in Wi-Fi signals can hinder precise indoor localization.
Additionally, references [80–84] have developed a passive and Wi-Fi-based fingerprinting framework for indoor localization. This work presents a CNN-based indoor localization framework for multi-floor and building localization. The study introduces a novel classification model combining Sparse Autoencoder (SAE) with 1D CNN and Mixture Density Networks (MDN). The simulation results underscore improvements in both floor and building localization accuracy. Nevertheless, the presence of noise in indoor environments poses challenges for classification.
Furthermore, reference [86] proposed a local connection-based DNN for indoor localization. The study introduces the PDL concept by validating the correlation between adjacent sub-carriers. The work effectively leverages global and local information from CSI amplitude for fingerprint localization, yielding more accurate results than existing schemes. However, using CSI data may limit the availability of specific location information, and the proposed local connection-based CSI introduces computational complexity.
To address noise-related challenges and ensure accurate indoor localization, reference [1,134,135] developed a DL-based algorithm that utilizes RSS and CSI transmission quality metrics. The study partitions a room plane into two-dimensional blocks or classes, framing the localization process as a classification problem. Four deep neural networks, implementing 1D CNN and multi-layer perception, are designed to locate objects within the room. Experimental results demonstrate efficient localization with reduced system complexity. However, the algorithm demands substantial training samples to build the database.
Thus, exploring DL-based indoor localization techniques continues to evolve and address persistent challenges. These innovative approaches offer promising solutions for improving accuracy and reliability in indoor positioning. However, hurdles such as noise, data standardization, and the need for extensive training data remain focus areas for future research endeavors.
In recent years, indoor localization has grown in significance as more and more individuals have come to rely on location-based services for a variety of purposes. The accuracy and dependability of indoor positioning systems have been proven to be greatly improved by indoor localization based on DL. DL models can efficiently learn the complicated correlations between sensor data and indoor locations by utilizing the power of ML and neural networks. This results in accurate and reliable location data. The advantages of DL-based indoor localization are considerable, even though there are still certain issues that must be resolved, such as multipath effects and noise, a lack of standardization, a shortage of labeled data, and the requirement for real-time performance. More developments can be anticipated in this area that will further improve the capabilities of indoor positioning systems as the demand for location-based services increases.
Acknowledgement: We extend our heartfelt appreciation to the funding organization and our dedicated team for their invaluable contributions in successfully publishing our research paper in a prestigious journal.
Funding Statement: This work is supported and funded by the Fundamental Research Grant Scheme-FRGS/1/2021/ICT09/MMU/02/1, Ministry of Higher Education, Malaysia.
Author Contributions: Khaldon Azzam Kordi: Design technique, Khaldon Azzam Kordi; Mardeni Roslee: Implementation, Khaldon Azzam Kordi; Abdulraqeb Alhammadi: Evaluation and validation, Mohamad Yusoff Alias; Abdulraqeb Alhammadi; Abdulraqeb Alhammadi: Formal examination, Khaldon Azzam Kordi; Abdulraqeb Alhammadi: Investigation, Mardeni Roslee; Mohamad Yusoff Alias: Supplies and resources, Abdulraqeb Alhammadi; Mohamad Yusoff Alias: Collections of data, Khaldon Azzam Kordi; Abdulraqeb Alhammadi: Composing first and preparations of draft, Khaldon Azzam Kordi; Athar Waseem: Composing reviewing and editing, Athar Waseem; Abdulraqeb Alhammadi; Mardeni Roslee: Visibility, Mardeni Roslee; Mohamad Yusoff Alias; Anwar Faizd Osman: Supervisory, Athar Waseem; Anwar Faizd Osman: Management of a project.
Availability of Data and Materials: Data and materials supporting the findings presented in this survey journal paper are readily available upon request.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. C. H. Hsieh, J. Y. Chen, and B. H. Nien, “Deep learning-based indoor localization using received signal strength and channel state information,” IEEE Access, vol. 7, pp. 33256–33267, 2019. doi: 10.1109/ACCESS.2019.2903487. [Google Scholar] [CrossRef]
2. O. Abuajwa, M. B. Roslee, and Z. B. Yusoff, “Simulated annealing for resource allocation in downlink noma systems in 5G networks,” Appl. Sci., vol. 11, no. 10, pp. 4592, 2021. doi: 10.3390/app11104592. [Google Scholar] [CrossRef]
3. V. Chamola, V. Hassija, V. Gupta, and M. Guizani, “A comprehensive review of the COVID-19 pandemic and the role of IoT, drones, AI, blockchain, and 5G in managing its impact,” IEEE Access, vol. 8, pp. 90225–90265, 2020. doi: 10.1109/ACCESS.2020.2992341. [Google Scholar] [CrossRef]
4. B. Sowmiya et al., “A survey on security and privacy issues in contact tracing application of COVID-19,” SN Comput. Sci., vol. 2, no. 3, pp. 1–11, 2021. doi: 10.1007/s42979-021-00520-z. [Google Scholar] [PubMed] [CrossRef]
5. M. Roslee, K. S. Subari, and I. S. Shahdan, “Design of bow tie antenna in cst studio suite below 2 GHz for ground penetrating radar applications,” in 2011 IEEE Int. RF & Microwave Conf., Seremban, Malaysia, IEEE, 2011, pp. 430–433. [Google Scholar]
6. K. A. Kordi, A. Alhammadi, M. Roslee, M. Y. Alias, and Q. Abdullah, “A review on wireless emerging IoT indoor localization,” in 2020 IEEE 5th Int. Symp. Telecommun. Technol. (ISTT), Malaysia, Shah Alam, IEEE, 2020, pp. 82–87. [Google Scholar]
7. A. O. Adikpe et al., “A review on wireless fidelity co-location technology adopted indoors for technology-based contact tracing,” Jordan J. Electr. Eng. , vol. 8, no. 2, pp. 134, 2022. doi: 10.5455/jjee.204-1635982606. [Google Scholar] [CrossRef]
8. S. Roy, R. J. J. Tiang, M. B. Roslee, M. T. Ahmed, and M. P. Mahmud, “Quad-band multiport rectenna for RF energy harvesting in ambient environment,” IEEE Access, vol. 9, pp. 77464–77481, 2021. doi: 10.1109/ACCESS.2021.3082914. [Google Scholar] [CrossRef]
9. L. Reichert, S. Brack, and B. Scheuermann, “A survey of automatic contact tracing approaches using bluetooth low energy,” ACM Trans. Comput. Healthc., vol. 2, no. 2, pp. 1–33, 2021. doi: 10.1145/3444847. [Google Scholar] [CrossRef]
10. A. Alhammadi, F. Hashim, M. F. A. Rasid, and S. Alraih, “Analysis of impact of RSS over different time durations in an indoor localization system,” in Int. Conf. Comput. Sci. Appl., Trieste, Italy, Springer, 2017, pp. 200–211. [Google Scholar]
11. M. A. Ganaie, M. Hu, A. Malik, M. Tanveer, and P. Suganthan, “Ensemble deep learning: A review,” Eng. Appl. Artif. Intell., vol. 115, pp. 105151, 2022. doi: 10.1016/j.engappai.2022.105151. [Google Scholar] [CrossRef]
12. J. Blumenthal, R. Grossmann, F. Golatowski, and D. Timmermann, “Weighted centroid localization in Zigbee-based sensor networks, Weighted centroid localization in Zigbee-based sensor networks,” in 2007 IEEE Int. Symp. Intell. Signal Process., Spain, IEEE, 2007, pp. 1–6. [Google Scholar]
13. M. Zhou et al., “Adaptive genetic algorithm-aided neural network with channel state information tensor decomposition for indoor localization,” IEEE Trans. Evol. Comput., vol. 25, no. 5, pp. 913–927, 2021. doi: 10.1109/TEVC.2021.3085906. [Google Scholar] [CrossRef]
14. Q. Gao, J. Wang, X. Ma, X. Feng, and H. Wang, “CSI-based device-free wireless localization and activity recognition using radio image features,” IEEE Trans. Veh. Technol., vol. 66, no. 11, pp. 10346–10356, 2017. doi: 10.1109/TVT.2017.2737553. [Google Scholar] [CrossRef]
15. P. F. Moshiri, R. Shahbazian, M. Nabati, and S. A. Ghorashi, “A CSI-based human activity recognition using deep learning,” Sensors, vol. 21, no. 21, pp. 7225, 2021. doi: 10.3390/s21217225. [Google Scholar] [PubMed] [CrossRef]
16. H. Bräuning et al., “A large volume 3D imaging gas scintillation counter with CSI-based wire chamber readout,” Nucl. Instrum. Methods Phys. Res. A: Accel. Spectrom. Detect. Assoc. Equip., vol. 348, no. 2–3, pp. 223–227, 1994. doi: 10.1016/0168-9002(94)90734-X. [Google Scholar] [CrossRef]
17. Q. Li, X. Liao, M. Liu, and S. Valaee, “Indoor localization based on CSI fingerprint by siamese convolution neural network,” IEEE Trans. Veh. Technol., vol. 70, no. 11, pp. 12168–12173, 2021. doi: 10.1109/TVT.2021.3107936. [Google Scholar] [CrossRef]
18. K. Karthikeyan, M. Radhika, K. Sivaprakash, and E. Sarayu, “An empirical analysis of fingerprinting based device-free localization using IoT,” in 2022 8th Int. Conf. Adv. Comput. Commun. Syst., Coimbatore, India, IEEE, vol. 1, 2022, pp. 1898–1903. [Google Scholar]
19. X. Sun, X. Gao, G. Y. Li, and W. Han, “Single-site localization based on a new type of fingerprint for massive MIMO-OFDM systems,” IEEE Trans. Veh. Technol., vol. 67, no. 7, pp. 6134–6145, 2018. doi: 10.1109/TVT.2018.2813058. [Google Scholar] [CrossRef]
20. W. Y. Lin, C. C. Huang, N. T. Duc, and H. N. Manh, “Wi-Fi indoor localization based on multi-task deep learning,” in 2018 IEEE 23rd Int. Conf. Digit. Signal Process. (DSP), Shanghai, China, IEEE, 2018, pp. 1–5. [Google Scholar]
21. P. Ssekidde, O. S. Eyobu, D. S. Han, and T. J. Oyana, “Augmented CWT features for deep learning-based indoor localization using WiFi RSSI data,” Appl. Sci., vol. 11, no. 4, pp. 1806, 2021. doi: 10.3390/app11041806. [Google Scholar] [CrossRef]
22. F. D. Vita and D. Bruneo, “A deep learning approach for indoor user localization in smart environments,” in 2018 IEEE Int. Conf. Smart Comput. (SMARTCOMP), Taormina, Italy, IEEE, 2018, pp. 89–96. [Google Scholar]
23. W. Liu et al., “Survey on CSI-based indoor positioning systems and recent advances,” in 2019 Int. Conf. Indoor Positioning Indoor Navi. (IPIN), Pisa, Italy, IEEE, 2019, pp. 1–8. [Google Scholar]
24. S. Muhammad and A. S. Yaro, “A model ittp architecture over heterogeneous network for 5G application,” ATBU J. Sci. Technol. Educ., vol. 7, no. 4, pp. 1–11, 2019. [Google Scholar]
25. J. M. Rocamora, I. W. Ho, W. M. Mak, and A. P. T. Lau, “Survey of CSI fingerprinting-based indoor positioning and mobility tracking systems,” IET Signal Process., vol. 14, no. 7, pp. 407–419, 2020. doi: 10.1049/iet-spr.2020.0028. [Google Scholar] [CrossRef]
26. Y. Zhang, D. Li, and Y. Wang, “An indoor passive positioning method using CSI fingerprint based on adaboost,” IEEE Sens. J., vol. 19, no. 14, pp. 5792–5800, 2019. doi: 10.1109/JSEN.2019.2907109. [Google Scholar] [CrossRef]
27. T. Ebuchi and H. Yamamoto, “Vehicle/pedestrian localization system using multiple radio beacons and machine learning for smart parking,” in 2019 Int. Conf. Artif. Intell. Inform. Commun. (ICAIIC), Okinawa, Japan, IEEE, 2019, pp. 86–91. [Google Scholar]
28. Z. Tian, Z. Li, M. Zhou, Y. Jin, and Z. Wu, “Pila: Sub-meter localization using CSI from commodity Wi-Fi devices,” Sensors, vol. 16, no. 10, pp. 1664, 2016. doi: 10.3390/s16101664. [Google Scholar] [PubMed] [CrossRef]
29. Z. Zhang, M. Lee, and S. Choi, “Deep-learning-based Wi-Fi indoor positioning system using continuous CSI of trajectories,” Sensors, vol. 21, no. 17, pp. 5776, 2021. doi: 10.3390/s21175776. [Google Scholar] [PubMed] [CrossRef]
30. H. Jiang, C. Peng, and J. Sun, “Deep belief network for fingerprinting-based RFID indoor localization,” in ICC 2019–2019 IEEE Int. Conf. Commun. (ICC), Shanghai, China, IEEE, 2019, pp. 1–5. [Google Scholar]
31. H. J. Bae and L. Choi, “Large-scale indoor positioning using geomagnetic field with deep neural networks,” in ICC 2019-2019 IEEE Int. Conf. Commun. (ICC), Shanghai, China, IEEE, 2019, pp. 1–6. [Google Scholar]
32. H. Rizk, M. Torki, and M. Youssef, “CellinDeep: Robust and accurate cellularbased indoor localization via Deep learning,” IEEE Sens. J., vol. 19, no. 6, pp. 2305–2312, 2018. doi: 10.1109/JSEN.2018.2885958. [Google Scholar] [CrossRef]
33. H. Rizk, M. Abbas, and M. Youssef, “Device-independent cellular-based indoor location tracking using deep learning,” Pervasive Mob. Comput., vol. 75, no. 6, pp. 101420, 2021. doi: 10.1016/j.pmcj.2021.101420. [Google Scholar] [CrossRef]
34. E. Y. Pay, J. J. Tiang, S. Muhammad, and T. C. Chuah, “Design of an efficient solar energy harvesting system for wireless power communication,” Int. J. Numer. Model.: Electron. Netw. Devi. Fields, vol. 36, no. 2, pp. e3054, 2023. doi: 10.1002/jnm.3054. [Google Scholar] [CrossRef]
35. H. Rizk and M. Youssef, “Monodcell: A ubiquitous and low-overhead deep learning-based indoor localization with limited cellular information,” in Proc. 27th ACM SIGSPATIAL Int. Conf. Adv. Geog. Inform. Syst., Chicago, Illinois, USA, 2019, pp. 109–118. [Google Scholar]
36. H. Rizk, A. Shokry, and M. Youssef, “Effectiveness of data augmentation in cellular-based localization using deep learning,” in 2019 IEEE Wirel. Commun. Netw. Conf. (WCNC), Marrakesh, Morocco, IEEE, 2019, pp. 1–6. [Google Scholar]
37. M. Abbas, M. Elhamshary, H. Rizk, M. Torki, and M. Youssef, “WiDeep: WiFi-based accurate and robust indoor localization system using deep learning,” in 2019 IEEE Int. Conf. Pervasive Comput. Commun. (PerCom), Kyoto, Japan, IEEE, 2019, pp. 1–10. [Google Scholar]
38. W. He, P. Motlicek, and J. M. Odobez, “Adaptation of multiple sound source localization neural networks with weak supervision and domain-adversarial training,” in ICASSP 2019–2019 IEEE Int. Conf. Acoustics, Speech Signal Process. (ICASSP), Brighton, UK, IEEE, 2019, pp. 770–774. [Google Scholar]
39. Y. Xu et al., “A machine hearing system for binaural sound localization based on instantaneous correlation,” in 2018 IEEE Int. Symp. Circuits Syst. (ISCAS), Florence, Italy, IEEE, 2018, pp. 1–5. [Google Scholar]
40. Z. Zhang, M. Lee, and S. Choi, “Deep learning-based indoor positioning system using multiple fingerprints,” in 2020 Int. Conf. Inform. Commun. Technol. Converg. (ICTC), Jeju, Korea (South). IEEE, 2020, pp. 491–493. [Google Scholar]
41. S. Muhammad et al., “Wideband RF rectifier circuit for lowpowered IoT wireless sensor nodes,” AEU-Int. J. Electron. Commun., vol. 170, no. 6, pp. 154787, 2023. doi: 10.1016/j.aeue.2023.154787. [Google Scholar] [CrossRef]
42. X. Wang, X. Wang, and S. Mao, “ResLoc: Deep residual sharing learning for indoor localization with CSI tensors,” in 2017 IEEE 28th Annual Int. Symp. Personal, Indoor, Mobile Radio Commun. (PIMRC), Montreal, QC, Canada, IEEE, 2017, pp. 1–6. [Google Scholar]
43. S. A. Samadh, Q. Liu, X. Liu, N. Ghourchian, and M. Allegue, “Indoor localization based on channel state information,” in 2019 IEEE Topical Conf. Wireless Sensors and Sensor Netw. (WiSNet), Orlando, FL, USA, IEEE, 2019, pp. 1–4. [Google Scholar]
44. M. Kim, D. Han, and J. K. K. Rhee, “Unsupervised view-selective deep learning for practical indoor localization using CSI,” IEEE Sens. J., vol. 21, no. 21, pp. 24398–24408, 2021. doi: 10.1109/JSEN.2021.3112994. [Google Scholar] [CrossRef]
45. A. Poulose and D. S. Han, “Hybrid deep learning model based indoor positioning using Wi-Fi rssi heat maps for autonomous applications,” Electronics, vol. 10, no. 1, pp. 2, 2020. doi: 10.3390/electronics10010002. [Google Scholar] [CrossRef]
46. S. J. Liu, R. Y. Chang, and F. T. Chien, “Analysis and visualization of deep neural networks in device-free Wi-Fi indoor localization,” IEEE Access, vol. 7, pp. 69379–69392, 2019. doi: 10.1109/ACCESS.2019.2918714. [Google Scholar] [CrossRef]
47. A. Adikpe, A. Yaro, A. Tekanyi, M. Almustapha, E. Agbon and O. Ayofe, “A review on technology-based contact tracing solutions and its application in developing countries,” Jordan J. Electr. Eng., vol. 8, no. 1, pp. 48–64, 2022. doi: 10.5455/jjee.204-1630926826. [Google Scholar] [CrossRef]
48. Y. G. Chapre, “Indoor localization using channel state information with multiple inputs and multiple outputs,” Ph.D. dissertation, The Univ. of New South Wales (UNSWSydney, 2018. [Google Scholar]
49. T. Koike-Akino, P. Wang, M. Pajovic, H. Sun, and P. V. Orlik, “Fingerprinting-based indoor localization with commercial mmwave WiFi: A deep learning approach,” IEEE Access, vol. 8, pp. 84879–84892, 2020. doi: 10.1109/ACCESS.2020.2991129. [Google Scholar] [CrossRef]
50. K. Ngamakeur, S. Yongchareon, J. Yu, and S. U. Rehman, “A survey on device-free indoor localization and tracking in the multi-resident environment,” ACM Comput. Surv. (CSUR), vol. 53, no. 4, pp. 1–29, 2020. [Google Scholar]
51. L. Zhang, Q. Gao, X. Ma, J. Wang, T. Yang and H. Wang, “DeFi: Robust training-free device-free wireless localization with WiFi,” IEEE Trans. Veh. Technol., vol. 67, no. 9, pp. 8822–8831, 2018. doi: 10.1109/TVT.2018.2850842. [Google Scholar] [CrossRef]
52. J. Wang et al., “Lifs: Low human-effort, device-free localization with fine-grained subcarrier information,” in Proc. 22nd Annual Int. Conf. Mobile Comput. Netw., New York City, NY, USA, 2016, pp. 243–256. [Google Scholar]
53. Z. P. Jiang et al., “Communicating is crowdsourcing: Wi-Fi indoor localization with CSI-based speed estimation,” J. Comput. Sci. Technol., vol. 29, no. 4, pp. 589–604, 2014. doi: 10.1007/s11390-014-1452-7. [Google Scholar] [CrossRef]
54. X. Wang, L. Gao, and S. Mao, “PhaseFi: Phase fingerprinting for indoor localization with a deep learning approach,” in 2015 IEEE Global Commun. Conf. (GLOBECOM), San Diego, CA, USA, IEEE, 2015, pp. 1–6. [Google Scholar]
55. H. Obeidat, W. Shuaieb, O. Obeidat, and R. Abd-Alhameed, “A review of indoor localization techniques and wireless technologies,” Wirel. Pers. Commun., vol. 119, no. 1, pp. 289–327, 2021. doi: 10.1007/s11277-021-08209-5. [Google Scholar] [CrossRef]
56. X. Chen, Y. Chen, S. Cao, L. Zhang, X. Zhang and X. Chen, “Acoustic indoor localization system integrating TDMA+FDMA transmission scheme and positioning correction technique,” Sensors, vol. 19, no. 10, pp. 2353, 2019. doi: 10.3390/s19102353. [Google Scholar] [PubMed] [CrossRef]
57. X. Wang, L. Gao, and S. Mao, “CSI phase fingerprinting for indoor localization with a deep learning approach,” IEEE Internet Things J. , vol. 3, no. 6, pp. 1113–1123, 2016. doi: 10.1109/JIOT.2016.2558659. [Google Scholar] [CrossRef]
58. P. K. Singh, R. Singh, S. K. Nandi, K. Z. Ghafoor, and S. Nandi, “Seamless V2I communication in hetnet: State-of-the-art and future research directions,” in Connected Vehicles in the Internet of Things, 2020, pp. 37–83. [Google Scholar]
59. H. Chen, Y. Zhang, W. Li, X. Tao, and P. Zhang, “ConFi: Convolutional neural networks based indoor Wi-Fi localization using channel state information,” IEEE Access, vol. 5, pp. 18066–18074, 2017. doi: 10.1109/ACCESS.2017.2749516. [Google Scholar] [CrossRef]
60. J. Xiao, K. Wu, Y. Yi, L. Wang, and L. M. Ni, “Pilot: Passive device-free indoor localization using channel state information,” in 2013 IEEE 33rd Int. Conf. Distributed Comput. Syst., Philadelphia, PA, USA, IEEE, 2013, pp. 236–245. [Google Scholar]
61. S. Shang and L. Wang, “Overview of wifi fingerprinting-based indoor positioning,” IET Commun., vol. 16, no. 7, pp. 725–733, 2022. doi: 10.1049/cmu2.12386. [Google Scholar] [CrossRef]
62. J. Wang et al., “Low human-effort, device-free localization with fine-grained subcarrier information,” IEEE Trans. Mob. Comput., vol. 17, no. 11, pp. 2550–2563, 2018. doi: 10.1109/TMC.2018.2812746. [Google Scholar] [CrossRef]
63. A. El-Naggar, A. Wassal, and K. Sharaf, “Indoor positioning using WiFi RSSI trilateration and INS sensor fusion system simulation,” in Proc. 2nd Int. Conf. Sensors, Signal and Image Process., Prague, Czech, 2019, pp. 21–26. [Google Scholar]
64. S. Han, Y. Li, W. Meng, C. Li, T. Liu and Y. Zhang, “Indoor localization with a single Wi-Fi access point based on OFDM-MIMO,” IEEE Systems J., vol. 13, no. 1, pp. 964–972, 2018. doi: 10.1109/JSYST.2018.2823358. [Google Scholar] [CrossRef]
65. F. Wen and C. Liang, “Fine-grained indoor localization using single access point with multiple antennas,” IEEE Sens. J., vol. 15, no. 3, pp. 1538–1544, 2014. [Google Scholar]
66. J. Xiao, K. Wu, Y. Yi, and L. M. Ni, “FIFS: Fine-grained indoor fingerprinting system,” in 2012 21st Int. Conf. Comput. Commun. Netw. (ICCCN), Munich, Germany, IEEE, 2012, pp. 1–7. [Google Scholar]
67. K. Wu, J. Xiao, Y. Yi, M. Gao, and L. M. Ni, “FILA: Fine-grained indoor localization,” in 2012 Proc. IEEE INFOCOM, Orlando, FL, USA, IEEE, 2012, pp. 210–2218. [Google Scholar]
68. U. M. Qureshi, Z. Umair, and G. P. Hancke, “Evaluating the implications of varying bluetooth low energy (BLE) transmission power levels on wireless indoor localization accuracy and precision,” Sensors, vol. 19, no. 15, pp. 3282, 2019. doi: 10.3390/s19153282. [Google Scholar] [PubMed] [CrossRef]
69. Z. Li, D. B. Acuna, Z. Zhao, J. L. Carrera, and T. Braun, “Fine-grained indoor tracking by fusing inertial sensor and physical layer information in WLANs,” in 2016 IEEE Int. Conf. Commun. (ICC), Malaysia, IEEE, Kuala Lumpur, 2016, pp. 1–7. [Google Scholar]
70. F. Zafari, A. Gkelias, and K. K. Leung, “A survey of indoor localization systems and technologies,” IEEE Commun. Surv. Tutor., vol. 21, no. 3, pp. 2568–2599, 2019. doi: 10.1109/COMST.2019.2911558. [Google Scholar] [CrossRef]
71. X. Huang, S. Guo, Y. Wu, and Y. Yang, “A fine-grained indoor fingerprinting localization based on magnetic field strength and channel state information,” Pervasive Mob. Comput., vol. 41, no. 17, pp. 150–165, 2017. doi: 10.1016/j.pmcj.2017.08.003. [Google Scholar] [CrossRef]
72. X. Wang, X. Wang, and S. Mao, “CiFi: Deep convolutional neural networks for indoor localization with 5 GHz Wi-Fi,” in 2017 IEEE Int. Conf. Commun. (ICC), Paris, France, IEEE, 2017, pp. 1–6. [Google Scholar]
73. H. Rizk, A. Elmogy, and H. Yamaguchi, “A robust and accurate indoor localization using learning-based fusion of Wi-Fi RTT and RSSI and rssi,” Sensors, vol. 22, no. 7, pp. 2700, 2022. doi: 10.3390/s22072700. [Google Scholar] [PubMed] [CrossRef]
74. S. P. Rana, J. Prieto, M. Dey, S. Dudley, and J. M. Corchado, “A self regulating and crowdsourced indoor positioning system through Wi-Fi fingerprinting for multi storey building,” Sensors, vol. 18, no. 11, pp. 3766, 2018. doi: 10.3390/s18113766. [Google Scholar] [PubMed] [CrossRef]
75. Z. Chen, H. Zou, J. Yang, H. Jiang, and L. Xie, “WiFi fingerprinting indoor localization using local feature-based deep LSTM,” IEEE Systems J., vol. 14, no. 2, pp. 3001–3010, 2019. doi: 10.1109/JSYST.2019.2918678. [Google Scholar] [CrossRef]
76. E. Schmidt, D. Inupakutika, R. Mundlamuri, and D. Akopian, “SDR-Fi Deeplearning-based indoor positioning via software-defined radio,” IEEE Access, vol. 7, pp. 145784–145797, 2019. doi: 10.1109/ACCESS.2019.2945929. [Google Scholar] [CrossRef]
77. X. Song et al., “A novel convolutional neural network based indoor localization framework with WiFi fingerprinting,” IEEE Access, vol. 7, pp. 110698–110709, 2019. doi: 10.1109/ACCESS.2019.2933921. [Google Scholar] [CrossRef]
78. M. Nowicki and J. Wietrzykowski, “Low-effort place recognition with wifi fingerprints using deep learning,” in Int. Conf. Automation, Warsaw, Poland, Springer, 2017, pp. 575–584. [Google Scholar]
79. C. Chen, Y. Chen, Y. Han, H. Q. Lai, and K. R. Liu, “Achieving centimeteraccuracy indoor localization on WiFi platforms: A frequency hopping approach,” IEEE Internet Things J., vol. 4, no. 1, pp. 111–121, 2016. [Google Scholar]
80. X. Song et al., “CNNLoc Deep-learning based indoor localization with wifi fingerprinting,” in 2019 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Leicester, UK, IEEE, 2019, pp. 589–595. [Google Scholar]
81. A. Mittal, S. Tiku, and S. Pasricha, “Adapting convolutional neural networks for indoor localization with smart mobile devices,” in Proc. 2018 on Great Lakes Symp. on VLSI, Chicago, IL, USA, 2018, pp. 117–122. [Google Scholar]
82. K. Bregar and M. Mohorčič, “Improving indoor localization using convolutional neural networks on computationally restricted devices,” IEEE Access, vol. 6, pp. 17429–17441, 2018. doi: 10.1109/ACCESS.2018.2817800. [Google Scholar] [CrossRef]
83. J. W. Jang and S. N. Hong, “Indoor localization with WiFi fingerprinting using convolutional neural network,” in 2018 Tenth Int. Conf. Ubiq. Future Netw. (ICUFN), Prague, Czech Republic, IEEE, 2018, pp. 753–758. [Google Scholar]
84. C. Cai, L. Deng, M. Zheng, and S. Li, “PILC Passive indoor localization based on convolutional neural networks,” in 2018 Ubiq. Posit., Indoor Navig. Location-Based Services (UPINLBS), Wuhan, China, IEEE, 2018, pp. 1–6. [Google Scholar]
85. Y. Sun, X. Wang, and X. Zhang, “Deep learning-based device-free localization using zigbee,” in Commun., Signal Process., Syst., Urumqi, China, Springer, 2020, pp. 2046–2049. [Google Scholar]
86. W. Liu, H. Chen, Z. Deng, X. Zheng, X. Fu and Q. Cheng, “LC-DNN Local connection based deep neural network for indoor localization with CSI,” IEEE Access, vol. 8, pp. 108720–108730, 2020. doi: 10.1109/ACCESS.2020.3000927. [Google Scholar] [CrossRef]
87. L. Zhang et al., “WiFi-based indoor robot positioning using deep fuzzy forests,” IEEE Internet Things J., vol. 7, no. 11, pp. 10773–10781, 2020. doi: 10.1109/JIOT.2020.2986685. [Google Scholar] [CrossRef]
88. P. Dai, Y. Yang, M. Wang, and R. Yan, “Combination of DNN and improved KNN for indoor location fingerprinting,” Wirel. Commun. Mob. Comput., vol. 2019, pp. 1–9, 2019. doi: 10.1155/2019/4283857. [Google Scholar] [CrossRef]
89. C. W. Ou et al., “A zigbee position technique for indoor localization based on proximity learning,” in 2017 IEEE Int. Conf. Mech. Autom. (ICMA), Takamatsu, Japan, IEEE, 2017, pp. 875–880. [Google Scholar]
90. Z. Ma, B. Wu, and S. Poslad, “A WiFi RSSI ranking fingerprint positioning system and its application to indoor activities of daily living recognition,” Int. J. Distrib. Sens. Netw., vol. 15, no. 4, pp. 1550147719837916, 2019. doi: 10.1177/1550147719837916. [Google Scholar] [CrossRef]
91. C. M. Own, J. Hou, and W. Tao, “Signal fuse learning method with dual bands wiFi signal measurements in indoor positioning,” IEEE Access, vol. 7, pp. 131805–131817, 2019. doi: 10.1109/ACCESS.2019.2940054. [Google Scholar] [CrossRef]
92. F. Ohori, S. Itaya, K. Maruhashi, and F. Kojima, “Subdividing one channel of 5GHz wireless lan into narrow channels for factory IoT,” in 2018 21st Int. Symp. Wirel. Personal Multim. Commun. (WPMC), Chiang Rai, Thailand, IEEE, 2018, pp. 632–635. [Google Scholar]
93. W. Qian, F. Lauri, and F. Gechter, “Convolutional mixture density recurrent neural network for predicting user location with WiFi fingerprints,” 2019. arXiv Preprint arXiv:1911. 09344. [Google Scholar]
94. Y. Li, X. Liu, S. Cai, and L. Zhang, “A low energy consumption LDPC coding technology applied to the power system,” in 2021 IEEE 4th Int. Conf. Elect. Inform. Commun. Technol. (ICEICT), Xi’an, China, IEEE, 2021, pp. 941–944. [Google Scholar]
95. R. S. Campos, L. Lovisolo, and M. L. R. de Campos, “Wi-Fi multi-floor indoor positioning considering architectural aspects and controlled computational complexity,” Expert Syst. Appl., vol. 41, no. 14, pp. 6211–6223, 2014. doi: 10.1016/j.eswa.2014.04.011. [Google Scholar] [CrossRef]
96. L. Nosrati, M. S. Fazel, and M. Ghavami, “Improving indoor localization using mobile UWB sensor and deep neural networks,” IEEE Access, vol. 10, no. 4, pp. 20420–20431, 2022. doi: 10.1109/ACCESS.2022.3151436. [Google Scholar] [CrossRef]
97. A. Haider, Y. Wei, S. Liu, and S. H. Hwang, “Pre- and post-processing algorithms with deep learning classifier for Wi-Fi fingerprint-based indoor positioning,” Electronics, vol. 8, no. 2, pp. 195, 2019. doi: 10.3390/electronics8020195. [Google Scholar] [CrossRef]
98. G. S. Wu and P. H. Tseng, “A deep neural network-based indoor positioning method using channel state information,” in 2018 Int. Conf. Comput., Netw. Commun. (ICNC), Maui, HI, USA, IEEE, 2018, pp. 290–294. [Google Scholar]
99. R. I. Vitanov and D. N. Nikolov, “A state-of-the-art review of ultra-wideband localization,” in 2022 57th Int. Scientific Conf. Inf., Commun. Energy Syst. Technol. (ICEST), Ohrid, North Macedonia, IEEE, 2022, pp. 1–4. [Google Scholar]
100. T. Li, H. Wang, Y. Shao, and Q. Niu, “Channel state information-based multilevel fingerprinting for indoor localization with deep learning,” Int. J. Distrib. Sens. N., vol. 14, no. 10, pp. 1550147718806719, 2018. [Google Scholar]
101. X. Shi et al., “Ultra-wideband microwave imaging system for root phenotyping,” Sensors, vol. 22, no. 5, pp. 2031, 2022. doi: 10.3390/s22052031. [Google Scholar] [PubMed] [CrossRef]
102. S. Monica and F. Bergenti, “Hybrid indoor localization using wifi and UWB technologies,” Electronics, vol. 8, no. 3, pp. 334, 2019. doi: 10.3390/electronics8030334. [Google Scholar] [CrossRef]
103. M. Stocker, B. Großwindhager, C. A. Boano, and K.Römer, “SnapLoc An ultra-fast UWB-based indoor localization system for an unlimited number of tags: Demo abstract,” in Proc. 18th Int. Conf. Inform. Process. Sensor Netw., Montreal, QC, Canada, 2019, pp. 348–349. [Google Scholar]
104. A. Poulose, O. S. Eyobu, M. Kim, and D. S. Han, “Localization error analysis of indoor positioning system based on UWB measurements,” in Eleventh Int. Conf. Ubiq. Future Netw. (ICUFN), Zagreb, Croatia, IEEE, 2019, pp. 84–88. [Google Scholar]
105. A. Poulose and D. S. Han, “Feature-based deep LSTM network for indoor localization using UWB measurements,” in 2021 Int. Conf. Artif. Intell. Inform. Commun. (ICAIIC), Jeju Island, Korea (South). IEEE, 2021, pp. 298–301. [Google Scholar]
106. X. Feng, K. A. Nguyen, and Z. Luo, “A survey of deep learning approaches for wifi-based indoor positioning,” J. Inf. Telecommun., vol. 6, no. 2, pp. 163–216, 2022. doi: 10.1080/24751839.2021.1975425. [Google Scholar] [CrossRef]
107. X. Ye and Y. Zhang, “Research on UWB Positioning Method Based on Deep Learning,” in 2020 5th Int. Conf. Mech., Control Comput. Eng. (ICMCCE), Harbin, China, IEEE, 2020, pp. 1505–1508. [Google Scholar]
108. Y. X. Ye, A. N. Lu, M. Y. You, K. Huang, and B. Jiang, “Wireless localization based on deep learning: State of art and challenges,” Math. Probl. Eng., vol. 2020, pp. 1–8, 2020. doi: 10.1155/2020/5214920. [Google Scholar] [CrossRef]
109. F. U. Drug, “Radio frequency identification (RFID),” 2018. Accessed: Dec. 05 2023. [Online]. Available: https://www.fda.gov/radiation-emitting-products/electromagnetic-compatibility-emc/radio-frequency-identification-rfid [Google Scholar]
110. X. Wang, X. Wang, and S. Mao, “RF sensing in the Internet of Things: A general deep learning framework,” IEEE Commun. Mag., vol. 56, no. 9, pp. 62–67, 2018. doi: 10.1109/MCOM.2018.1701277. [Google Scholar] [CrossRef]
111. C. McGugin et al., “Radiofrequency identification tag localization is comparable to wire localization for non-palpable breast lesions,” Breast Cancer Res. Treat., vol. 177, no. 3, pp. 735–739, 2019. doi: 10.1007/s10549-019-05355-0. [Google Scholar] [PubMed] [CrossRef]
112. D. Zhu, B. Zhao, and S. Wang, “Mobile target indoor tracking based on multidirection weight position kalman filter,” Comput. Netw., vol. 141, pp. 115–127, 2018. [Google Scholar]
113. I. S. Alfurati and A. T. Rashid, “Performance comparison of three types of sensor matrices for indoor multi-robot localization,” Int. J. Comput. Appl., vol. 975, pp. 8887, 2018. [Google Scholar]
114. A. Sobehy, E. Renault, and P. Mühlethaler, “Generalization aspect of accurate machine learning models for CSI-based localization,” Ann. Telecommun., vol. 77, no. 5–6, pp. 345–357, 2022. doi: 10.1007/s12243-021-00853-z. [Google Scholar] [PubMed] [CrossRef]
115. J. Yu, P. Wang, T. Koike-Akino, and P. V. Orlik, “Multi-modal recurrent fusion for indoor localization,” in ICASSP 2022–2022 IEEE Int. Conf. Acou., Speech Signal Process. (ICASSP), Singapore, IEEE, 2022, pp. 5083–5087. [Google Scholar]
116. W. Kim, Y. Ahn, J. Kim, and B. Shim, “Towards deep learning-aided wireless channel estimation and channel state information feedback for 6G,” J. Commn.Net., vol. 25, no. 1, pp. 61–75, 2023. doi: 10.23919/JCN.2022.000037. [Google Scholar] [CrossRef]
117. S. Farazi, A. G. Klein, and D. R. Brown III, “The age of channel state information,” in Age of Information: Foundations and Applications. Cambridge University Press, pp. 384–405, 2023. [Google Scholar]
118. T. M. Nguyen et al., “A primal-dual framework for transformers and neural networks,” in Eleventh Int. Conf. Learn. Rep., 2023. [Google Scholar]
119. G. Tuna and V. C. Gungor, “A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks,” Int. J. Commun. Syst., vol. 30, no. 17, pp. e3350, 2017. doi: 10.1002/dac.3350. [Google Scholar] [CrossRef]
120. N. Singh, S. Choe, and R. Punmiya, “Machine learning based indoor localization using Wi-Fi RSSI fingerprints: An overview,” IEEE Access, vol. 9, pp. 127150–127174, 2021. doi: 10.1109/ACCESS.2021.3111083. [Google Scholar] [CrossRef]
121. Q. Song, S. Guo, X. Liu, and Y. Yang, “CSI amplitude fingerprinting-based nb-iot indoor localization,” IEEE Internet Things J., vol. 5, no. 3, pp. 1494–1504, 2017. doi: 10.1109/JIOT.2017.2782479. [Google Scholar] [CrossRef]
122. K. S. V. Prasad, E. Hossain, and V. K. Bhargava, “Machine learning methods for RSS-based user positioning in distributed massive mimo,” IEEE Trans. Wirel. Commun., vol. 17, no. 12, pp. 8402–8417, 2018. doi: 10.1109/TWC.2018.2876832. [Google Scholar] [CrossRef]
123. K. S. V. Prasad and V. K. Bhargava, “RSS-based positioning in distributed massive mimo under unknown transmit power and pathloss exponent,” in 2019 IEEE 90th Vehicular Technol. Conf., Honolulu, HI, USA, IEEE, 2019, pp. 1–5. [Google Scholar]
124. M. B. Afuosi and M. R. Zoghi, “Indoor positioning based on improved weighted KNN for energy management in smart buildings,” Energy Build., vol. 212, no. 1, pp. 109754, 2020. doi: 10.1016/j.enbuild.2019.109754. [Google Scholar] [CrossRef]
125. E. Homayounvala, M. Nabati, R. Shahbazian, S. A. Ghorashi, and V. Moghtadaiee, “A novel smartphone application for indoor positioning of users based on machine learning,” in Adjunct Proc. of the 2019 ACM Int. Joint Conf. Pervasive Ubiq. Comput. Proc. of the ACM Int. Symp. Wearable Comput., London, UK, 2019, pp. 430–437. [Google Scholar]
126. W. Liu et al., “Survey on CSI-based indoor positioning systems and recent advances,” in 2019 Int. Conf. Indoor Posit. Indoor Navigation (IPIN), Pisa, Italy, IEEE, 2019, pp. 1–8. [Google Scholar]
127. C. Zhou, J. Liu, M. Sheng, Y. Zheng, and J. Li, “Exploiting fingerprint correlation for fingerprint-based indoor localization: A deep learning based approach,” IEEE Trans. Veh. Technol., vol. 70, no. 6, pp. 5762–5774, 2021. doi: 10.1109/TVT.2021.3075539. [Google Scholar] [CrossRef]
128. S. H. Lee, W. Y. Kim, and D. H. Seo, “Automatic self-reconstruction model for radio map in Wi-Fi fingerprinting,” Expert Syst. Appl., vol. 192, no. 5, pp. 116455, 2022. doi: 10.1016/j.eswa.2021.116455. [Google Scholar] [CrossRef]
129. S. Holcer, J. T. Sospedra, M. Gould, and I. Remolar, “Privacy in indoor positioning systems: A systematic review,” in 2020 Int. Conf. localization GNSS (ICL-GNSS) IEEE, Tampere, Finland, 2020, pp. 1–6. [Google Scholar]
130. K. Shaukat et al., “Performance comparison and current challenges of using machine learning techniques in cybersecurity,” Energies, vol. 13, no. 10, pp. 2509, 2020. doi: 10.3390/en13102509. [Google Scholar] [CrossRef]
131. K. Shaukat, S. Luo, V. Varadharajan, I. A. Hameed, and M. Xu, “A survey on machine learning techniques for cyber security in the last decade,” IEEE Access, vol. 8, pp. 222310–222354, 2020. doi: 10.1109/ACCESS.2020.3041951. [Google Scholar] [CrossRef]
132. N. B. Priyantha, A. Chakraborty, and H. Balakrishnan, “The cricket location support system,” in Proc. of the 6th Annual Int. Conf. Mobile Comput. Netw., Boston, Massachusetts, USA, 2000, pp. 32–43. [Google Scholar]
133. K. Shaukat, S. Luo, and V. Varadharajan, “A novel deep learning-based approach for malware detection,” Eng. Appl. Artif. Intell., vol. 122, no. 4, pp. 106030, 2023. doi: 10.1016/j.engappai.2023.106030. [Google Scholar] [CrossRef]
134. K. Shaukat, S. Luo, S. Chen, and D. Liu, “Cyber threat detection using machine learning techniques: A performance evaluation perspective,” in 2020 Int. Conf. Cyber Warfare Secur. (ICCWS) IEEE, Islamabad, Pakistan, 2020, pp. 1–6. [Google Scholar]
135. K. Shaukat, S. Luo, and V. Varadharajan, “A novel method for improving the robustness of deep learning-based malware detectors against adversarial attacks,” Eng. Appl. Artif. Intell., vol. 116, no. 4, pp. 105461, 2022. doi: 10.1016/j.engappai.2022.105461. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools