
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

FANET and MANET, a Support and Composition Relationship
1 COMBA R&D Laboratory, Faculty of Engineering, Universidad Santiago de Cali, Cali, 76001, Colombia
2 Development Department, Closemobile R&D Telecommunications LS, Madrid, 28070, Spain
3 GIEIAM Research Group, Faculty of Engineering, Universidad Santiago de Cali, Cali, 76001, Colombia
4 Faculty of Engineering, Universidad Libre, Cali, 760031, Colombia
5 Faculty of Systems and Informatics Engineering, Universidad Nacional Mayor de San Marcos, Lima, 15001, Perú
* Corresponding Author: Carlos Andrés Tavera Romero. Email:
Computers, Materials & Continua 2025, 82(2), 1699-1732. https://doi.org/10.32604/cmc.2025.056400
Received 22 July 2024; Accepted 05 December 2024; Issue published 17 February 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This study investigates the design and implementation of Flying Ad Hoc Networks (FANETs), a network architecture inspired by the Mobile Ad Hoc Network (MANET) model, specifically tailored to support unmanned aerial vehicles (UAVs). As UAVs increasingly contribute to diverse fields, from surveillance to delivery, FANETs have emerged as essential in ensuring stable, dynamic communication channels among drones in flight. This research adopts a dual approach, combining rigorous theoretical analysis with detailed practical simulations to assess the performance, adaptability, and efficiency of FANETs in varying conditions. The findings emphasize the ability of FANETs to manage network congestion effectively in densely populated areas, a critical feature for maintaining reliable communications in complex scenarios. Moreover, FANETs demonstrate high potential to support critical applications, such as emergency response, disaster management, and public safety operations, where quick and coordinated action is paramount. The study also underscores the importance of establishing a hierarchical structure among nodes within the network, which allows for more efficient data exchange and helps optimize the overall network performance. Through this work, significant insights are offered into the design principles that can enhance UAV communication networks, providing a foundation for the development of more resilient, scalable, and efficient technological solutions. These advancements could accelerate the deployment of UAVs across a variety of sectors, including logistics, agriculture, environmental monitoring, and more. As such, this study not only contributes to the field of ad hoc networking but also holds potential for transformative impacts across industries where UAVs play an increasingly central role, promoting greater integration and operational success.Keywords
To understand the premises of the flying ad hoc network (FANET) model, it is necessary to start by understanding the difference between the mediator network model and the ad hoc model; the mediator network model is for collaborative networks, where there is a network hub that manages and controls all devices, while in the ad hoc model, the devices, through their intrinsic capacities to conform as hosts, can associate to perform activities according to collaboration conditions [1,2].
In the FANET model, mobility allows the nodes to adapt to each application’s needs depending on the network model, offering a structured dynamic behavior that allows better performance [3,4]; this model can be considered an extension of the mobile ad hoc network (MANET) [5], which, simultaneously, could be extrapolated under certain conditions from this same model. The difference is that, in this type of network, the unmanned aerial vehicle (UAV) is outlined as components, which are associated through wireless network concepts and mediating mechanisms that associate them with the nodes that conform to said network, such as the Central Base Station [6].
The FANET association type is not alien to the parameters that characterize this network model, such as the access, registration, and control and mobility process management, which adds to the network behavior and performance, which is noticeable in their mobility, topological changes, radioelectric propagation, support mechanisms and what is finally defined as autonomy, according to its energy efficiency [4,7,8].
Not only the MANET model but also the Vehicular Ad Hoc Network (VANET) model with unique UAV systems, as well as the FANET model, whose appearance in 2013 increases multiple UAV systems derived from the ad hoc model [9]. Moreover, these UAV systems allow fast node movement, dynamic topology, and better security. Therefore, considering the routing decisions taken, a FANET protocol is specifically proposed in this document [4,8,10].
The ad hoc FANET and ad hoc VANET networks are MANET ad hoc networks; therefore, they have advantages in terms of portability and mobility, but FANET is different due to its specific characteristics, which allow managing and controlling the associated devices in the network wirelessly and during flight, unlike VANET that is framed in 2-D from the surface. This means that, according to its usability and associability, 3-D FANET is the best option to work with mobile flying objects, UAV swarms, or drones [8,10,11].
The FANET concept is defined as the extrapolation of an ad hoc network model, in which civil and military applications are supported [12]. It is composed of a converged network idea, which has telecommunications capabilities in topological architecture, which normally has a star-shaped network mechanism, where there is the possibility of arranging it with nodes that can be autonomous. Moreover, they have intrinsic capacities that allow the establishment of network instances or centralized and functional node types (such as a base station or an air/satellite control mechanism), which help to organize multi-UAV systems in a swarm to perform functions in open spaces [8,13].
The details focus on performing tasks that other types of mobile devices cannot normally perform or that have other mobility modes, which are determined by advantages such as shorter times to complete tasks, cost reduction in resources, greater scalability, and more reliability. Hence, in FANET, when one of the devices in the swarm dissociates from the network for some reason, the task can still be completed by the remaining connected devices in the swarm. This could not be performed using a single drone associated with the network, as once dissociated there will be no other drone or additional drones to replace it instantly and automatically on the network [14]. In Fig. 1, the different types of connections that can occur with UAVs are observed. A direct connection between the ships and the ground signal is maintained with FANET [15,16].

Figure 1: Multi-UAV communication
It can be mentioned that the mobility aspect in the FANET model is decisive. The deployment of components is determined by factors such as speed or positioning, which are 3-D determined. It implies that it can vary widely, considering so many displacement degrees to be managed [17]. FANET nodes mobility model differences, in terms of MANET and VANET, affect aspects of its ordering and planning. These concepts defined the way and methods to perform a design, as well as considered the applications because FANET works similarly to VANET. For speed management, FANET and VANET can be compared; however, in the topology deployment planes, the moving objects in VANET are in 2-D, while in FANET this aspect is dimensionally greater [11,18–20].
A detailed comparison table has been added to the manuscript, outlining the major differences and similarities between FANET, MANET, and VANET. Table 1 compares aspects such as mobility (3D for FANET, terrestrial for MANET, and 2D for VANET), application domains (UAVs for FANET, ground-based mobile devices for MANET, and vehicles for VANET), and routing protocols (AODV and OLSR adaptations).

The importance of this research is to work on the FANET concept development, since there are recognized, advantages compared to other models already defined and controlling the direct impacts in the FANET model. However, not everything related to MANET and VANET is technically applicable, considering their high 3-D mobility [21].
This paper effectively sets the context for the discussion on FANET and its comparison with MANET, highlighting the evolution of communication networks for UAVs. However, it would be beneficial to more explicitly state the research gap that this work addresses. The present study deals with the need for an efficient, scalable, and structured communication system in FANETs, which is crucial due to the unique challenges posed by the high mobility and dynamic topology of UAVs. While MANETs are designed for ground devices with predictable movement patterns, FANETs require advanced solutions to manage real-time communication and frequent changes in network topology. This work fills that gap by proposing improvements in network protocols and management strategies for FANETs, emphasizing both the novelty and practical importance of the research [11].
It has added detailed explanations in sections where technical concepts are introduced, specifically in areas covering mobility models and routing protocols. Furthermore, visual representations of these concepts have been included in the form of diagrams. For example, we have included a comparison diagram of FANET, MANET, and VANET, clearly showing differences in mobility, topology, and applications. This will make it easier for readers to follow the distinctions between these models.
The FANET, MANET, and VANET comparison diagram has been included, highlighting mobility (3D for FANET, 2D for VANET, terrestrial for MANET), applications (UAVs, mobile devices, and vehicles), and security differences [11].
This research was conducted using a simulation-based approach to analyze the behavior of FANET networks. Data were obtained using specialized network simulation tools such as NS-3, which allowed modeling and evaluating different scenarios of mobility and communication among UAVs. The parameters evaluated include network latency, packet loss, connection stability, and adaptability to topological changes.
Specific mobility models for UAVs were selected that reflect the high speed and dynamics of FANET scenarios. Patterns of flight based on random and predefined trajectories were used, with UAVs moving in three dimensions, which significantly differs from terrestrial patterns in MANETs. These models enabled the simulation of FANET behavior under various flight conditions, such as node dispersion, changes in flight altitude, and variable speed.
To evaluate the performance of FANET, several routing protocols, both reactive and proactive, commonly used in MANETs and adapted to FANETs, were compared. Protocols such as AODV (Ad Hoc On-Demand Distance Vector) and OLSR (Optimized Link State Routing) were assessed based on their ability to adapt to the high mobility and dynamic topology of FANETs. Their performance was measured in terms of bandwidth efficiency, energy consumption, and reliability of data transmission [4,22].
The results obtained through the simulations were analyzed using standard metrics in networking, such as packet delivery ratio, average delay, throughput, and hop count in the network. These metrics allowed identifying the main challenges in communication within FANET and evaluating the effectiveness of different routing protocols under high mobility scenarios. Based on the analysis, improvements in network management strategies for FANET are proposed to optimize scalability and adaptability to changes in topology.
Although this study is not presented as a systematic literature review (SLR), a comprehensive search was conducted in relevant sources to identify the main drivers in the field of FANET networks. The search encompassed articles published between 2019 and 2024, ensuring the inclusion of recent and pertinent research. Key topics focused on included the development of new routing protocols, scalability in networks with numerous UAVs, and the integration of FANET with emerging technologies such as 5G. The information was gathered from peer-reviewed scientific journals, conferences, and technical papers, aiming to underpin and contextualize the contributions of this work in the field of UAV communications.
The literature review has been refined to better connect with the study’s objectives. We have added specific references to prior work that directly influences our approach, emphasizing the progression of research in FANET’s mobility models and routing strategies and how this study builds upon those foundations.
3 Types of Mobility and Routing
The network topology management in FANET must be treated considering the positioning of the objects. Some things that should be considered under this topology are the speed changes in turn maneuvers, rotation actions, trajectory types of definition, and proactive mechanisms for handling collisions [23]. However, the aspects are irrelevant when it is determined to arrive to realistic FANET networks from simulation models. As for this type of mobile concept, stochastic characteristics can be derived as regards the node’s behavior. This is considered a design premise, but it is also conclusive that technical aspects suggest that reference models order network topologies, where autonomous intelligence degrees are determined, and these define the paradigmatic, topological, and functional concept of the FANET network [24–27].
In this type of mobility model, it is necessary to consider the nodes’ structure organizational management, which is determined and by the object’s constant movements in the network. These movements are in relation to changes that may occur regarding position, speed, and acceleration [18]. Due to the highly mobile nature of FANET, the mobility model can be pseudo-classified and determine the network performance in stages of the network design before its implementation. These models are discussed below [4,28,29].
In this type of model, in a determined lapse of time, the direction, speed, and time, as well as how to choose the way it is routed in space are selected randomly for each FANET object [30].
3.2.2 Time-Dependent Mobility Model
This model is based on time mathematically calculated, which marks and predisposes the important moments in the function development, which allows to take precedence over changes in speed and direction given in the workspace [31]. Although stochastic processes are discussed, UAVs must have mechanisms marked in their mobility concept that allow them to avoid excess use of their autonomy. Designs closest to reality are these due to their 3-D moving characteristic, but randomness and fortuitous times in the function’s performance are not elements, which may prevent, with planning in simulators, achieving high-performance swarm topologies [32].
3.2.3 Proactive Trajectory Mobility Models
Swarm management of organized objects is adjusted to this model since they have previously defined trajectories and are not addressed randomly. FANET objects must follow a structured path in movement and performance parameters in the space provided to perform a task. The ways of arranging them can be characterized, but the simulation models close to FANET give degrees of freedom in obtaining circular, ovoid, or simply rectilinear trajectories, which allow the implementation of UAV swarms more successfully. This type of model emulates the autopilot movement control, which moves according to states set before the start of each tour [24].
To the extent of FANET’s aim, it is hereby mentioned that this model is shaped by nature’s behavior, such as mosquitoes, bees, or flies arranging themselves when flying. The movement defines a centralized point, which with a due margin of distance considers the displacement space; at first, this model can be approached with stochastic and non-stochastic characteristics [33,34]. Hence, this FANET model can be pseudo-classified using mechanisms that arrange them in the following:
• Exponential correlated random model: This has a similarity to time-dependent models, where its determination requires considering a large extent of variables, such as speed, position, route, routing, and other variables that determine the functional part itself [19].
• Particles swarm mobility model: This is based on the FANET nodes arrangement optimization method, which predictively considers the vectorized parameter calculations such as the direction and speed specified in the displacement states within defined space [35].
• Landmark group mobility: This model is an object-grouping scheme in FANET, which is achieved by defining and configuring a set of reference variables, which characterize the mobile nodes. These nodes, in turn, gather around a heavy base station as their main node. This main node defines the movements and routings of the topology. However, it is worth mentioning that from the modeling process it is noted that, due to the forms of functional work, numerous ways of arranging the objects positioned in the defined space can be defined; these forms can be in column, nomad community, convergent point, and in pursuit [36].
• Hybrid mobility models: This model is adaptive and dynamic since it is defined as a combination of other models. This type of model is convergent, and its arrangement benefits from the advantages and functional approach to the FANET network capabilities and of the other objects defined in the swarm. This helps improve the autonomy of its components in the case of UAVs, since they have a more precise and focused management of their capabilities when performing its work [37].
3.2.5 Reference Aspects of Topologies and Routing in FANET
In the FANET scheme, there are constant challenges, such as positioning the nodes appropriately for tasks like monitoring regions and spaces while minimizing operational costs and maximizing network performance. This indicates a strong commitment between the topological scheme and routing mechanisms, aimed at reducing the negative effects of high node mobility. Traditional routing protocols cannot efficiently handle airborne networks, especially ad hoc networks, due to the high mobility of the nodes and topology changes [4,11,38].
FANET network topologies are highly dynamic compared to other mobile ad hoc network models. In this network scheme, the topology changes more frequently than in a typical MANET or VANET. This implies that routing is crucial due to the rapid and stochastic movement of the nodes; the topology of a FANET changes quickly, and the nodes must react by automatically updating their routing tables. Therefore, in a FANET, it is essential to employ a fast and reactive routing procedure; for example, the BABEL routing mechanism in MANETs or the Optimized Link State Routing (OLSR) protocol does not fit the evolving topology of a FANET. Protocols designed and applied in mobile network contexts need to be efficient, fail-proof, and adaptable to topology changes. In this regard, the MANET concept addresses classes of ad hoc routing algorithms, such as Optimized Link State Routing (OLSR) and Predictive OLSR (P-OLSR). Predictive OLSR is considered an extension of OLSR that adequately adapts to the FANET concept, utilizing telemetry and support technologies for data transmission, transfer, and management that can be implemented in network nodes. This indicates that P-OLSR algorithms are more suitable and specific routing techniques for FANET, and in the functional routing context, these techniques significantly outperform OLSR due to their performance and frequent network topology changes [11,39–41].
To overcome rapidly changing network topologies, methods such as node functionalities, the use of directional antennas combined with cross-layer protocol schemes, and intelligent medium access control (SMAC), P-OLSR, and directional OLSR are used. These are extensions of basic OLSR, where route selection is based on flight information such as altitude variations, tilt, roll, and orientation.
It’s also possible to address this problem by considering star network topologies with static routing, but this can restrict the operational area of node swarms, as they cannot leave the centralized control center’s coverage range. Considering the high mobility and changes, the topologies for FANET development should focus on partially connected mesh ad hoc networks, allowing nodes to use multi-hop communication schemes to extend the operational area.
3.2.6 Performance Specifications and Functional Characteristics of FANET
Another aspect to characterize within FANET is that most nodes have an average autonomy of 30 min due to battery capacity. Nodes with low battery charge will cease to be part of the network due to their “inoperability,” meaning the network will self-configure and restructure its topology.
Mobility is associated with speed metrics, affecting communication/transmission quality, as this parameter indicates how fast nodes move and how the topology changes with distance in a particular area. Implementing and constructing this system with an appropriate level of mobility depends on node swarm formation or the scenario/topology determining routes while maintaining transmission with fewer communication problems. The determining factor is the random mobility of the nodes, as they can move closer or further apart considering flight speed. Therefore, network topology changes due to node mobility require faster response levels from routing protocols, as inefficient responses degrade network performance [1,16].
3.2.7 Functional Elements for Characterization Models in FANET Based Upon Positioning Principles
The characterization of FANET, fundamentally, includes essential elements that shape its functionality.
To maintain ideal performance in a FANET, the initial consideration is always an energy-efficient algorithm that includes communication channel parameters, such as the received signal strength indicator (RSSI), mobility level, and flight autonomy of each node. These are used as decision metrics to ensure quality of service and quality of experience for the network [42]. The flight system can reduce energy consumption even with network topology changes, effectively identifying new routes to maintain the required quality level. Frequent control information updates provide more precise information but increase energy usage, reducing node autonomy [22,41,43–45].
In FANET scenarios, nodes operate collaboratively, and their data transmission and movement behaviors must be effectively controlled to maximize the benefits of the FANET network scheme and its application performance. Two control approaches can be considered for FANET network management: a decentralized one with high complexity for synchronizing node information, implying more repeated control message transmissions and increased energy consumption, and a centralized control system that makes optimized decisions based on the global node context. This indicates a centralized control node managing the mobility trajectories of the swarm nodes to avoid collisions or improve FANET network performance. Additionally, it involves routing data, and changing packet transmission parameters, such as data rate or transmission power, for performance reasons reflected in energy use [20,22,26,46].
It is crucial to manage node topology information, where uncontrolled message transmission reduces bandwidth consumption and generates signaling overload. This is due to mobility or energy consumption prediction algorithms, as the control node can change how and when control messages are broadcast. In large-scale environments, multi-hop communication processes are required to broadcast control messages, achieved by deploying several local control nodes responsible for sending control messages to/from the central control node [8,41,46,47].
One of the primary aspects is the used routing types within FANET positioning protocol principles, given that various routing types can be employed in this environment. The frequent changes in network topology make routing in FANET highly significant, unlike in MANET (Mobile Ad Hoc Networks) or VANET (Vehicular Ad Hoc Networks) [48].
Communication processes in FANETs are not well-developed, as nodes are controlled by ground operators in real-time, with positions and flight trajectories pre-planned, eliminating the need for intra-swarm communication. Direct node-to-ground controller connections are impractical due to hardware limitations. For long-distance missions, robust real-time ground-air wireless links may not be available, and only some nodes can communicate with ground controllers. Thus, self-organized communications between swarm nodes are required. Flat organization nodes, without reliable ground controller support, self-organize through purely distributed optimization methods. Challenges arise in deployment coverage and position adjustment of multiple nodes, coordinating spectrum access and tasks by detecting and interacting with information from other nodes [1,18].
In this work, it contains the discussion of the challenges faced in implementing mobility models, such as managing latency and maintaining synchronization between highly mobile nodes. To overcome these, optimized algorithms were employed to ensure real-time updates of the network topology, improving the system’s responsiveness to mobility changes [42].
By delving into each of these key components, the characterization of FANET becomes clearer, highlighting the critical elements that contribute to its unique functionality and efficiency. The cited references provide a comprehensive foundation for understanding and optimizing FANET, ensuring effective and reliable communication in dynamic and challenging environments. The key components include:
TOPOLOGY
Context: For FANET, topology refers to the network structure interconnecting the nodes, which in this case are drones or other unmanned aerial vehicles (UAVs). FANET topology is dynamic and frequently changes due to the continuous movement of UAVs. The network must be robust and capable of quickly adapting to these changes to maintain effective communication among nodes. The topologies in the FANET network model have constant changes due to their nature and what their nodes do functionally in motion. There are possible topologies in FANET, but these change considerably in form, but not in the way of associating and forming one, as is the case of the star topology, in which all mobiles are referencing direct links with a base station. Control, and the layout of the mesh topology, in which it is required to dynamically have a routing type of routing. These two types of base topologies mentioned reflect advantages and disadvantages. To comment, in the case of star networks, each mobile has a link to a centralized base station, and the technical consistency of each data channel can vary in its functional aspects. Due to the high speed of mobile nodes, which affects the exchange of data and parameters [10,12–14,49].
Approaches to Managing FANET Topology:
• Network Formation Algorithms: These algorithms determine how UAVs can form and maintain a cohesive network while moving. They ensure that despite constant movement, the network remains connected and efficient. The purpose principle and the possibility of winning with the functional aspects and capacity of flying smart objects, are determined by their ability to form sets of devices in cooperative mode, to achieve proposal objectives in a mission network and with this cooperate to complete any quantity and classes of complex tasks [42]. The outcome achieved using a mode to perform tasks with flying smart devices, operating in a multi-UAV cooperation mode, forms the foundation of the FANET concept, which has been the focus of current and future research objectives. Scientists are working diligently on developing tasks related to the FANET model, as this requires detailed specifications from various perspectives and angles, and of course, realistic views. They consider elements such as routing protocols, deployment, managing and understanding their hierarchical structure, applying the most suitable optimization algorithms, and the best applications, while considering the convergence moment in the IT (Information Technology) world [11].
In the context of Network Formation Algorithms, the concept of TPDF (Threat Probability Density Function) is mentioned, and to manage this complex situation, a PSO (Particle Swarm Optimization) is proposed. This is based on the TARFC algorithm (Threat Avoidance and Reconnaissance FANET Construction algorithm), which allows Flying Smart Objects to dynamically adapt, avoiding high-risk areas while maintaining connectivity in the FANET network. To have an updated graph of the FANET set, methods that can track the movement of associated mobile entities exist. This capability can be achieved by fixing a set of sensors on the flying object’s infrastructure, which can constantly provide data on the state, position, location, association modes, energy level, and other interesting parameters related to the flying device. These elements inspire the use of graphs to manage the FANET network context, considering elements like editing the topology remotely. This introduces concepts like TED (Total Edit Distance), which describes sudden changes in the FANET architecture and potential growing threat factors over time [2,22,50–52].
A consistent track for analyzing the FANET model starts with concepts like TED, proposing a strong and adaptable TA&CRFO algorithm (Threat Avoidance and Continuous Reconnaissance FANET Operation algorithm), which can be initially used to achieve semi-distributed control of the FANET network, with the goal being fully distributed and autonomous control. Initial simulation results of this review show that both the TARFC and TA&CRFO concepts can effectively manage network connectivity while avoiding threats in dynamic scenarios. From this review of the FANET scientific community, it can be stated that the average threat level in FANET networks is reduced, achieving threat level reductions of 3.99%~27.51% and 3.07%~26.63% for TARFC and TA&CRFO respectively, compared to the PSO algorithm. Finally, considering the limited distributed moderation due to the complexity of the TA&CRFO algorithm, it achieves only 20.08% of what TARFC achieves [11,53,54].
• Topology-Based Routing Protocols: These protocols focus on how data is transmitted efficiently within an ever-changing network. They are designed to handle the dynamic nature of FANET and ensure reliable communication between UAVs. In Flying Ad Hoc Networks (FANET) there are challenges to support cooperation and scalability, and incidentally cooperative communication, which is why data and information require protocol management through routing in FANET, due to because it is required by the necessary connectivity, which at certain times becomes pivoting and this affects the energy consumption of the devices in flight. Some extensive reviews and investigations that seek how to improve the performance of routing protocols, within the environment of ad hoc mobile networks, which even require adapting and implementing them to the FANET model, the high drawbacks that arise when seeking design strategies. Efficient routing, which guarantees solid communication of data and parameters consistently between unmanned aerial vehicles, is given by its dynamic nature in the way it operates, the energy management that is a limiting factor, the low heterogeneity that determines, its natural mobility, and its provision for network segmentation [11,34,55,56].
In FANET, there can be significant variability in the classification of routing methods and protocols, with implications for performance and required quality of service (QoS) margins, including topology- and geography-based approaches. In this case, it is appropriate to consider that topology-based protocols require working with models and foundations that are determined from the inclusion of references and hierarchical parameterization. One of the possible implications is the determination of these types of networks to be used on a large scale due to their very nature, the cost would be related to the way of facing the complexity of having the condition of being on a network and arranging it for that objective. Within conventional routing methods, proactive protocols always present significant overheads in the construction of their routing tables, while reactive protocols cause delays that are not within the tolerance of the network model; In the case of those that are considered hybrids, most of these ignore the standard attributes of mobile devices in flight. This comment addresses the case of the Global Positioning System (GPS), which can be versatile in leveraging its characteristics within this network model, such as location information. That is, protocols that are sized for geographic management can have retransmission processes that take advantage, according to the state of the network, of the advantage of not requiring knowledge of the current state of the same network where they are located. The FANET model takes into consideration that it benefits from protocols based on the geographical aspect, which is used in the determination of high mobility in the development of dynamic missions, even though this is not so evident. Perfect and at the same time has a nuance that needs to be perfected [11,40,57].
In the FANET model, it is beneficial to note that routing protocol decisions are made in a distributed and autonomous manner for each flying vehicle, due to the immediate need to consider the global network state, which is not available when using geographic protocols. This necessitates having diagrams and possible visualizations of the network state to concurrently show the management and control possibilities of the FANET network’s parameters. Addressing this challenge requires leveraging characteristics and advantages adaptable to this network model, such as Q-learning, a simple and widely used Reinforcement Learning (RL) technique. It is important that the behavior and state of the network can be adjusted by managing its functional parameters, which are monitored to determine its state [54,58,59]. Each flying vehicle is equipped with intelligent agents that enable optimal decision-making and actions in line with this routing concept. This results in autonomous and adaptive routing decisions through protocol calculation algorithms. This approach can be compared to the SPF (Shortest Path First) algorithm, where determining the shortest path involves the Link Duration (LD) parameter. This parameter may yield functional results that are suboptimal and indicate unsuitable energy consumption states for efficient operation, revealing “possible holes” in the routing. These issues should be reflected in the routing state tables of the FANET model [11,41,60].
It is very important to consider within this context that the defined concepts about metrics used to define the moments, concepts and decision making about routing are an important part. This is because multiple metrics can be considered, but the important thing is to find a model that focuses on the most efficient decision-making processes, which are extracted precisely from the processing of said metrics; Within the FANET model, this can be adapted, and the protocols for these types of networks can be considered to be based on continuous and periodic learning that functionally adapts to the interaction between the intelligent agents of the network and the environment. Metric analysis should always determine the best decision, which should counteract inaccurate information states within the environment [11,28,59,61].
In this work, we discuss how the FANET model could be adapted for other environments, such as underwater or space-based networks. This would require modifications to the communication protocols, especially concerning radio frequencies and signal propagation in different mediums. The model’s adaptability to 3D movement makes it promising for such applications, with further research needed into protocol customization. As the FANET topology changes over time, learning performance will decrease because nodes need time to understand rapid changes in topology. The Hello protocol allows nodes to announce their presence and periodically exchange their state with each other. Q-Learning-based routing protocols use hello messages to interact with the dynamic environment and can therefore maintain an adjacent state, in which the hello timer and Expiration Timer (ET) play an important paper. More precisely, the former represents the periodic Sensing Interval (SI), and the latter reflects the effective period of the neighbors. However, both are defined in the routing protocol standards proposed by the IETF (Internet Engineering Task Force), and performance often deteriorates on rapidly changing FANETs for reasons explained necessarily; In the first instance, the SI is determined by the performance demands of the network. In this case, the network devices in flight are affected by the recurring delays that are the results of the processing, when they act as aerial relay nodes, and consequently, this will affect the respective energy efficiency requirements, when it comes, for example, to perform coverage monitoring tasks. It is a premise to have determined that the aspects of stability and reliability of the links in a FANET network are quite critical aspects in the functionalities of (unmanned) aerial devices in the network, when they are used in elementary search and rescue processes in environments and situations with such a need. Also having an adequate SI should allow the network to satisfy various performance demands. With this it is argued that the necessary performance of a FANET network is affected by an unsuitable SI, that is, with a larger SI the overhead and energy consumption can be reduced, but there will be significant packet loss if the SI lags behind the arrival of traffic or is too large to perceive the change in the links; Consequently, if you have a smaller SI, this can help to have an adequate precision margin in the process of detecting topology changes; Otherwise, the additional overhead is wasted if the perception frequency is greater than the NCR (Neighbor Change Rate), or the TAR (Traffic Arrival Rate), which are parameters referred to in the FANET topology. In contrast to this, although the overhead and energy consumption can be reduced with a larger SI, the consequence is that there will be significant packet loss, if the SI lags the arrival of traffic or is too large to perceive. the change of key links [11,38,41,59,61].
For reviewing this topic, is recommended to start with the analysis of the queuing service framework to sense the establishment and disconnection of links between UAVs in network. The parameters for consideration are the Link Duration (LD), Neighbor Change Rate (NCR), and the distribution of Neighbor Change Interarrival Time (NCIT). In the investigations done about this concept is taken the introduction of the concept of a protocol called Topology Aware Resilient Routing based on Adaptive Q-learning (TARRAQ); this cited concept allows UAVs to obtain distributed, autonomous, and adaptive routing decisions. In related concepts, TARRAQ consists of three phases: 1. neighbor discovery; 2. neighbor maintenance; 3. relay selection [11]. This section is derived from a study and review that considers the first two phases, where the residual Link Duration (LD) predicted by the Kalman Filter (KF) functions as an expiration timer for available neighbors, while the Neighbor Change Rate (NCR) and Neighbor Change Interarrival Time (NCIT) are used to calculate the resilient sensing interval (SI) as needed. This allows all UAVs in the network to dynamically adjust their sensing schemes based on dynamic behavior and performance requirements, ensuring accurate neighbor information with manageable overhead. The final phase is crucial for constructing necessary tables to obtain neighbor information. This data is treated as finite states where intelligent agents take actions, using an adaptive Q-learning approach to ensure distributed and autonomous routing decisions, which is the main goal. The concepts related to FANET routing contribute to understanding the dynamic topology changes of the model analyzed, using mechanisms such as queuing theory to reveal the mapping relationships between LD and service duration, NCR and customer change rate, and NCIT and customer change interarrival time distribution. Closed-form expressions for LD, NCR, and NCIT are derived to accurately describe mobility behavior. This research is done in the first instance to precisely characterize FANET topology changes. Additionally, the initiative considers using an innovative resilient sensing strategy based on initial findings. The NCR process, utilizing a Dynamic Exponential Weighted Moving Average (DEWMA), calculates topology changes. By defining the expected detection delay of network events, the resilient SI is determined in real-time based on NCR and NCIT to meet the network’s dynamic demands. Furthermore, with the KF method, the residual LD is predicted to determine the validity period of neighbors. The most important concept in this part, is using a model adaptive Q-learning approach that enables UAVs to make distributed and autonomous routing decisions. In dynamic FANETs, the action space is updated over time at low cost through this contribution. The reward function is designed based on link quality, residual energy, and neighbor distance to find a stable route with a lower loss rate, fewer hops, and reduced energy consumption. Additionally, action selection, learning rate, and discount factors are adjusted according to the residual LD, achieving adaptive learning in a variable network environment [11,39–41].
General Approach to FANET Topology Optimization
Numerous studies have explored approaches to optimize and manage the network topology of FANET, underscoring the importance of an efficient structure for sustaining a functional network. Representative works focus on specific optimization methods that enhance network adaptability in dynamic environments and improve energy efficiency, including references [17,18,21,32,36]. These studies provide critical insights into network stability and link management under high-mobility conditions.
Techniques for Topology Management in FANET
In addition, research such as that in [24,30,31,35] delves into advanced topology management techniques for FANETs. These studies emphasize the implementation of adaptive algorithms that dynamically reorganize nodes to maximize coverage and minimize energy consumption during extended missions. Such algorithms are tailored to handle the high mobility and rapid reconfiguration of nodes, which are critical elements for FANETs in autonomous flight environments.
Research on FANET Communication Protocols
Further, recent studies like those by [19,23,27,33] investigate the significance of communication protocols in maintaining a robust topology. These protocols ensure reliable data transmission across FANETs and are designed to adapt to frequent changes in network configuration. By implementing efficient routing techniques, these studies contribute to enhanced network responsiveness and link management in critical scenarios.
ENERGY
Conceptual Definition: Energy management is crucial in FANET due to the limited battery capacity of UAVs. Energy efficiency becomes vital for prolonging the mission duration and the operability of the network. Without efficient energy management, UAVs may deplete their batteries quickly, leading to communication breakdowns and mission failures [61].
Strategies to Optimize Energy Consumption:
• Energy-Saving Algorithms: These techniques enable UAVs to reduce energy consumption without compromising network connectivity. By optimizing power usage, these algorithms help extend the operational time of UAVs. It is always known that grouping and association algorithms significantly impact network performance. In this case, to ensure the viability of forming a cluster concept, there is a CH (Cluster Head), which is the leader for each cluster, and oversees communication between clusters and inside clusters, as seen in Fig. 1. It is feasible to find the best possible solution for problems related to building environments using biological algorithms. This is applied when the nodes are added, and their geographic locations are shared to address scalability issues, by the data communications of parameters related. In the case of load balancing, it is required to have a high guarantee that there is efficient use of resources within each cluster. From the reviews made, it is considered that a good method to achieve effective clustering is the Moth-Flame Optimizer, which accurately provides the optimal number of clusters. In the case of moths, they may seem annoying and harmful, but from their varieties and similarities with other insects, it is learned that they fly at night using the artificial or natural light present in the environment to navigate [61]. This prompted the development of an intelligent clustering strategy that is based on the principle of Moth-Flame Optimization (MFO) adapted to the FANET model (see Fig. 2), which aims to reduce energy consumption and at the same time extend the area. Coverage of the Sensor Nodes (SN) [40,61,62]. This assertion is made by the study provided in the Energy Efficient Clustering Protocol model with MFO, which becomes an application algorithm, and additionally uses a variation of the K-Means density clustering method, which seeks to make the selection of the Group Heads (CH), which are hierarchically determined in a distributed cluster [61]. The K-Means Procedure is originally based on the neighborhood parameter, and together with the MFO algorithm is used for the initial CH selection. The improvement added by the EECP-MFO (Energy Efficient Clustering Protocol-Moth Flame Optimization) algorithm considers two very important factors, energy level and distance between neighbors, to develop the selection of the appropriate CH [31,63]. With the EECP-MFO algorithm, energy consumption is reduced by efficiently managing the transmission power of the nodes according to operational needs, which reduces the concept of network load, allowing the useful life of the cluster to be extended, surpassing other models due to the results obtained to consider in terms of elements of judgment in the FANET networks such as cluster construction time, cluster longevity, possibilities of success and energy consumption [38,40,56,61].
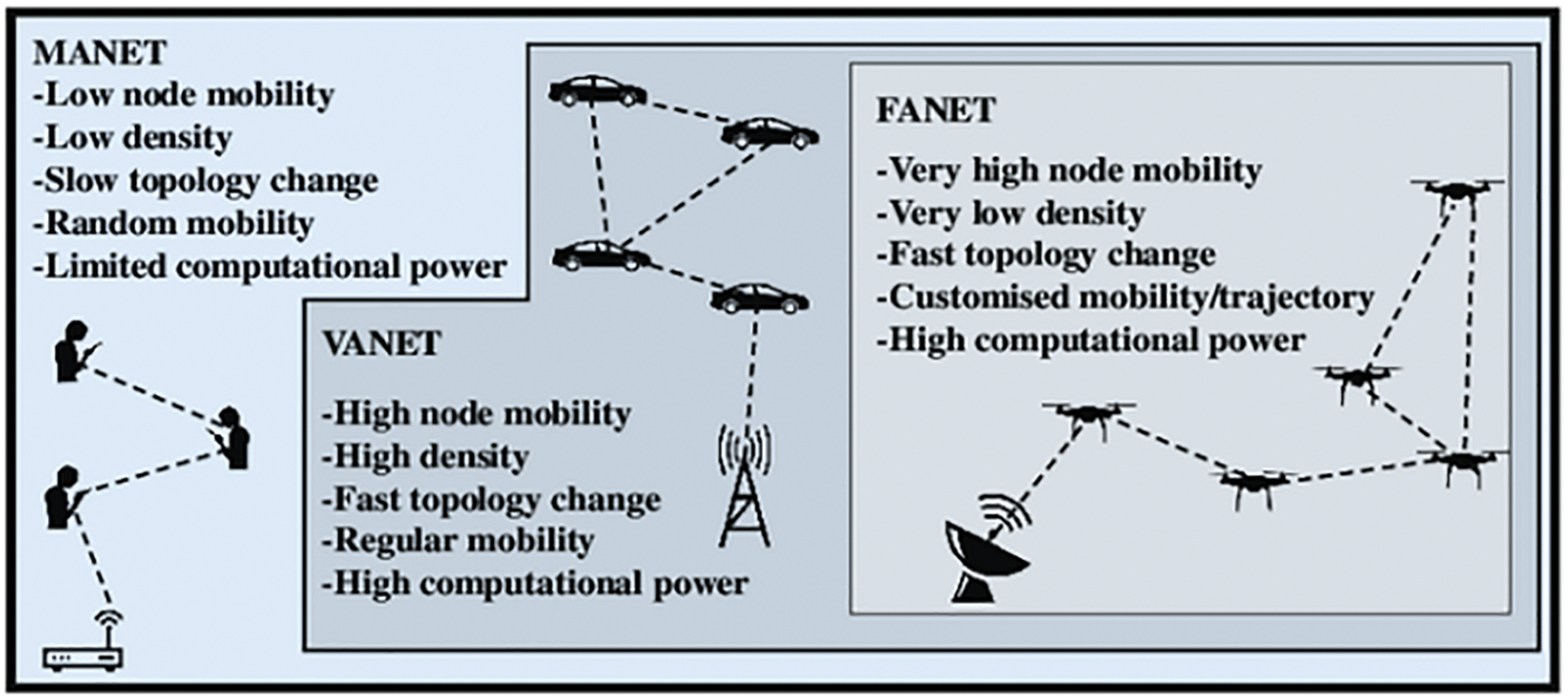
Figure 2: FANET, MANET, and VANET comparison diagram, with concepts and functions
• Importance of Efficient Flight Path Planning
Planning trajectories that minimize energy use is a critical strategy in FANETs, as efficient flight paths directly reduce the energy required for movement and help conserve battery life. Efficient path planning is particularly essential due to the limited energy resources available to UAVs, underscoring the need for careful route optimization [31,63]. These studies emphasize the importance of pre-determined trajectories and energy-saving algorithms, which play a vital role in extending UAVs’ operational time and ensuring mission completion in FANET deployments.
• Unique Routing Requirements in FANETs
In the context of FANETs, the routing requirements are notably more stringent than those of other networking models, given the high mobility and dynamic topology of UAV networks. FANET-specific routing protocols must support these complex needs, as existing protocols in MANETs or VANETs may fall short due to inadequate energy optimization and adaptation features [38,56]. Research in this area suggests the development of highly specialized routing solutions capable of balancing energy efficiency with reliable communication in constantly changing aerial networks.
• Challenges and Future Directions in FANET Routing Systems
The extensive capabilities required for routing in FANETs make many existing protocol systems unsuitable, necessitating the development of new, efficient routing systems tailored specifically for FANETs. Addressing these routing challenges is a foundational aspect of FANET architecture, as shown in studies [46,61]. The Future research directions involve enhancing routing adaptability, minimizing energy consumption, and optimizing data transmission across networks with high node mobility, which are crucial to supporting efficient, large-scale UAV operations.
A source routing scheme designed for FANETs must overcome two main challenges: low residual energy caused by long transmission ranges and packet retransmissions, and the high dynamic nature of the network topology. During the neighbor and route discovery phase, each node periodically broadcasts messages (e.g., Hello messages) to create a neighboring set of two-hop neighboring nodes. These hello messages include the node’s geographical location obtained from GPS and its identity, which are used to predict the locations of two-hop neighbors based on coordinates, indicating the distance between nodes [46,61].
To enhance network stability and route lifetime during the route selection phase, the FANET network is clustered using the K Means algorithm, based on: a) residual energy and mobility metrics, which help in selecting nodes with higher residual energy and those moving close to the average speed as Cluster Heads (CHs); and b) geographical location and node identity, where nodes moving close to a CH’s average speed join its cluster. The CH collects data from cluster members, aggregates it, and forwards it. The transmission power of CHs and cluster members is adjusted to further reduce energy consumption, which is a key objective. CHs handle data transmission between clusters, with routes established based on the residual energy of the CHs, selecting those with higher residual energy as intermediate nodes [41].
During the route maintenance phase, link disconnections due to network topology dynamics trigger the route discovery mechanism to select a new CH or join another CH and reestablish routes, restarting the process.
These routing schemes are compared with a state-of-the-art scheme using a swarm-based algorithm, to obtain optimized resource utilization, and this offers the possibility of give guarantees for the stability of MANET network. One choice of achieve this is the development of simulations that employs a random behavior and movement Mobility Model [41].
• Energy Management in Communication Protocols: Designing communication protocols to be more energy-efficient can significantly impact overall energy usage. These protocols focus on minimizing energy expenditure during data transmission and reception. In this aspect, the first thing is to consider energy efficiency, the next is to analyze the altitude, then analyze the different types of routing protocols and finally analyze the physical characteristics of UAVs [46].
When it comes to the first thing to consider, a Flying Ad Hoc Network (FANET) requires routing protocols that are very energy efficient, for the well-known reason of the battery limitation in a UAV [59].
In the FANET network model, there is a class of this, which is the one in which UAVs communicate with each other without the provision of a central station (see Fig. 3).
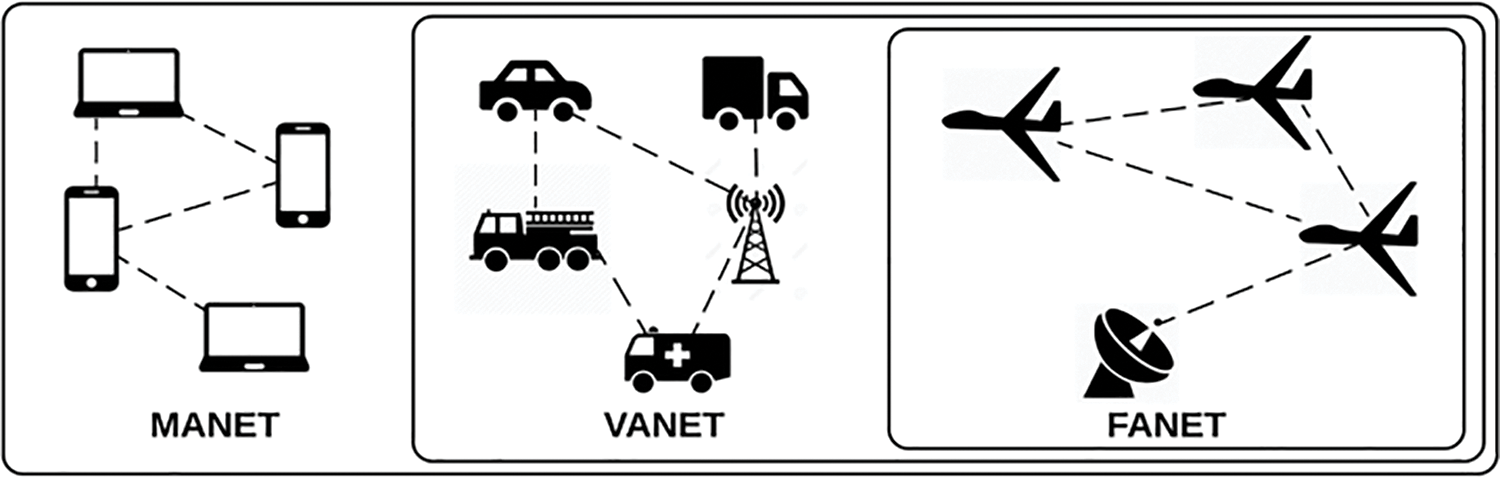
Figure 3: FANET, MANET, and VANET comparison diagram, and relationship
This is also the one that establishes the model in which said central infrastructure is the coordinator of the network (see Fig. 4).

Figure 4: FANET model and network
In this context, the energy efficiency of routing protocols is critical to the overall performance and longevity of the network. A third option would be a hybrid model (see Fig. 5). In this network concept, it is based on the understanding that these networks depend on the type of application and use, in which the arrangement of the hierarchy with the nodes prevails [3,26].

Figure 5: FANET centralized model
According to what is available in the network applicability environment, there are routing protocols that are inefficient in terms of energy and others that are efficient. Inefficient routing protocols can waste energy by selecting routes that do not optimize energy consumption, quickly draining the battery and causing UAV failures and network outages. Instead, efficient routing protocols can choose routes that minimize power consumption and maintain network connectivity, thereby extending the battery life of a UAV. In general, energy-efficient routing protocols are the foundation for the success of FANET networks and can significantly improve the reliability and longevity of these networks. To evaluate the energy efficiency of routing protocols in FANET, various factors must also be considered, such as the residual energy of a UAV, the distance between nodes, and the quality of the communication link [26].
Energy Management Strategies in FANET
Energy management is a crucial aspect of FANET due to the limited battery capacity of UAVs. Numerous studies have addressed various strategies to optimize energy usage, providing comprehensive insights into enhancing the efficiency and longevity of UAV operations [12–14,17,49]. These strategies include energy-saving algorithms, efficient flight route planning, and energy-efficient communication protocols, which collectively contribute to reducing the overall energy consumption in FANETs [24,40].
Optimizing Energy Use through Advanced Techniques
Further research has delved into specific techniques for optimizing energy use in FANET, such as clustering methods and power management strategies [18,23,27,30]. These methods aim to balance energy consumption across the network, ensuring that no single UAV depletes its battery prematurely, thus maintaining network stability and mission effectiveness.
Integration of Renewable Energy Sources
Advanced approaches to energy management also explore the integration of renewable energy sources and adaptive power control mechanisms [19,33,35–37]. These techniques enable UAVs to dynamically adjust their energy consumption based on operational requirements and environmental conditions, further enhancing the sustainability of FANET operations.
Comprehensive Optimization through Combined Efforts
Additional studies focus on the comprehensive optimization of energy use through a combination of hardware improvements and software-based solutions [63–65]. These combined efforts provide a multifaceted approach to energy management, addressing both the physical and operational aspects of UAV energy consumption in FANETs [43,66].
POSITION
Determination: The position of UAVs is fundamental for the functionality of FANET. Position determines network connectivity and communication efficiency. Accurate positioning ensures that UAVs can maintain effective communication links, crucial for the network’s overall performance.
Position-Related Studies:
• Position-Based Routing Protocols: These protocols use location information to improve data routing. By knowing the precise positions of UAVs, these protocols can optimize the routing paths, reducing delays and improving reliability.
• Localization Techniques: Methods to determine the precise position of UAVs in real-time are essential for maintaining network connectivity. These techniques include GPS-based systems, inertial navigation systems, and other sensor-based methods.
• Impact of Position on Connectivity: The spatial arrangement of UAVs affects network quality. Studies explore how different positions influence connectivity and develop strategies to enhance network performance by optimizing UAV placement.
Significance of Positioning in FANET Networks
“Positioning plays a fundamental role in FANETs, as it directly affects network connectivity and communication efficiency. Key studies, such as [1,6,12,14,49], underscore the importance of accurate positioning in ensuring reliable data exchange among UAVs. Effective positioning enables stable connections and optimizes network resources, essential for maintaining robust communication in FANET deployments.”
Impact of Positioning on Network Performance
The relationship between positioning and overall network performance has been widely explored. Research in [17,18,21,23,27] delves into how UAV positioning influences network metrics like signal strength, latency, and coverage. These studies suggest that optimizing UAV positions can significantly reduce packet loss and improve transmission reliability, which is crucial in high-demand FANET applications.
Techniques for Position Optimization
Various techniques have been proposed to optimize UAV positioning, with a focus on maximizing network efficiency and energy conservation. References [24,30–33] discuss positioning algorithms that dynamically adjust UAV locations in response to network requirements. These algorithms are essential for applications requiring precise adjustments to maintain stable links as UAVs move across different terrains.
Positioning Challenges and Adaptation Strategies
Positioning challenges in FANETs, including high mobility and dynamic topology changes, are addressed in studies like [19,35–37]. These works present adaptation strategies, such as real-time position tracking and autonomous adjustment of UAV trajectories, which enhance network responsiveness and resilience. Effective positioning adaptations are especially valuable in scenarios where UAVs encounter rapidly changing environments.
Future Directions in FANET Positioning
Emerging research is exploring advanced positioning systems that could further improve FANET performance, particularly in large-scale operations. Studies like [43,48,64–66] investigate hybrid positioning models combining GPS and inertial navigation, as well as AI (Artificial Intelligence)-driven techniques. These approaches show promise in achieving high-precision positioning that could support next-generation FANET applications.
HETEROGENEITY HIERARCHY
Definition and Relevance: Heterogeneity and hierarchy in FANET refer to the diversity of UAVs in terms of capabilities, roles, and hierarchy levels within the network. A heterogeneous network includes UAVs with different capabilities, such as varying sensor types, communication ranges, and processing power. Hierarchical models organize these UAVs into different roles, such as control nodes and subordinate nodes, enhancing network management and efficiency [67,68].
In FANET networks, a model based on alliances optimizes resources in unmanned flying node swarms, performing tasks based on imposed assignments, offering higher network scheme flexibility. Heterogeneity and complexity levels can complicate the optimization process of implementing communication network schemes for unmanned aerial nodes. Associating unmanned aerial nodes with functional traits and heterogeneous characteristics should differ from VANET and MANET practices, as communication modules vary among different wireless devices like cars and handheld devices. In FANET systems, drones associated with an unmanned node swarm exhibit different aspects regarding size, altitude, and communication modules. In this network scheme, some nodes form alliances to perform tasks during the flight, while others operate individually. Each mobile node’s role in this structure is to keep detecting neighbors to acquire and maintain routing information, coordinating data communication despite node heterogeneity [67,68].
Aspects of Heterogeneity and Hierarchy:
• Heterogeneous Networks: Integration of different types of UAVs with various capabilities allows for a more versatile and robust network. Each UAV can perform tasks suited to its strengths, improving overall network functionality [14,23].
• Hierarchical Models: Structures where some UAVs act as master or control nodes, and others as subordinate nodes. This hierarchy simplifies network management and can improve efficiency by delegating tasks according to UAV capabilities [32,33].
• Advantages of Heterogeneity and Hierarchy: These characteristics can enhance network flexibility and efficiency. Heterogeneous and hierarchical networks can adapt better to different mission requirements and environmental conditions.
Observations: The studies analyzing these aspects and references explore the benefits of heterogeneity and hierarchy in FANET, providing detailed insights into how these features can be leveraged to improve network performance and adaptability [19,36,69,70].
3.3 Protocolary Principles of Positioning in FANET
Whenever discussing network schemes supported by wireless networks, it is important to review the principles that electromagnetically determine the simple idea of network coverage within a defined space. This seeks to first determine efficiency levels in the configuration and adjustment of the physical layer, as well as data link elements of the FANET network objects, which are autonomously determined. It is usually solved by looking for savings models and algorithmic principles that help the composition of the network topology. The logic formally defined techniques (evolutionary algorithms, linear programming, or other types of algorithmic handling) are in search of the planning process network associated parameters elements [63].
In FANET networks specific case arranged with objects such as UAVs, the objectives are focused on optimal positioning within the coverage margins to increase functional capacity and autonomy; in this case the classification can be considered in two areas that are treated as following.
3.3.1 Height-Based Positioning
In the FANET network model, height is a parameter associated with coverage, which in turn defines the optimal position of a UAV object in the available space. This model considers the capabilities provided in the interfaces and the centralizing nodes [64]. This can be characterized by formulas and mathematical concepts that optimize autonomy, which is referenced in the maximum-allowed losses and some additional statistical parameters. Scenarios based on height face adverse conditions where a signal-to-noise ratio (S/N) control model is required; this ratio may be ideal (S/N >>> 1) or undesirable (S/N ≈ 1 or S/N <<< 1). Certainly, the signal handling capacity determines network deployment and consequently the good or bad coverage. These types of aspects must solve physical layer and data link problems, where the objects interface part is arranged in the FANET network topological model [65].
3.3.2 Network-Based Positioning
The principle that defines the FANET network model is its mobility, which implies that the objects of this topology type are not positioned in the deployment of defined 3-D space planes. Networking means determining shared traits in common to perform tasks. This is normally solved by a logical routing procedure, which can be defined statically or dynamically to arrange the FANET object positioning [43]. The network processes extrapolation can be obtained in multiple ways, such as observation since concepts in networks are structured by layers. This defines any action imposed on functional deployment is stratified; particularly, the FANET model is defined by layers, considering that positioning is part of its physical and network access layer as it is performed extrapolated in the TCP/IP (Transmission Control Protocol/lnternet Protocol) model. The algorithm must always be adjusted to obtain an optimal position within the FANET topology, which seeks to determine an ideal height management concept, which allows movements that do not affect energy consumption, among which are vertical and horizontal [66].
The network-based positioning model proposes to monitor the position algorithmically and logically in the coverage area of swarmed UAVs related to the base station. This can help manage physical layer parameters such as gain and bandwidth antennas, which, in turn, optimally defines the ideal position and altitude of each object in an active flight. The coverage area definition can be performed with a basic model using a UAV and a base station, which helps to determine the area coverage. Measurements taken in this are extrapolated and adjusted for the rest of the FANET objects [69]. Therefore, if it is necessary to determine autonomous network models, mobile stations are preferred. It is feasible to require the use of collaborative network model types, so the definition of routing mechanisms and association are ensured to determine network structures that are composed of nodes that work hierarchically, and each node simultaneously guarantees its presence in the coverage area. This is achieved by the S/N ratio management of each participating device [70].
Lately, technological progress in electronic systems and specifically avionics, mainly equipment miniaturization and cost reduction, has boosted UAV’s performance. In addition to having an application in the military area, UAVs are today extensively widespread in the civil application field. With the use of multiple UAV group composite systems, missions can be conducted cooperatively, economically, and efficiently compared to single UAV systems [71]. Therefore, this choice led to the development of new network technologies between the UAVs and the ground control station. A network conformed by UAVs is known as FANET and is a subset of MANET [49].
Mobility models are used to simulate UAV movement and, thus, assess whether a given protocol works in a particular context. The constant individual mobility of mobile nodes can significantly affect network performance; these aspects are precisely not well explored yet. Current mobility models cannot fully reproduce realistic UAV behavior, causing errors in the simulation result [47].
It is essential to improve the quality of service (QoS), so it is necessary to optimize the connection metrics such as delay, reliability, and robustness, among others. Likewise, it is necessary to improve the end-user experience, assessing the quality of data collected by UAVs, which can be performed using QoE (quality of experience). This can be achieved from multimedia streams by measuring user perception, which allows verifying and complementing traditional QoS metrics [15,39].
In addition to transmission reliability and efficiency issues, security concerns against malicious acts due to the channel resources used must also be considered. Most of the available security architectures depend on the existence of ground stations; however, FANET does not require them [72]. Therefore, solutions must be sought that satisfy security needs, considering its highly dynamic characteristics, as is the case with the IPSec (Internet Protocol Security) concept. If the system does not meet one of these criteria, ad hoc network securely depends on its availability, integrity, confidentiality, authenticity, association mechanisms, authorization, and anonymity; hence, the system is determined to be unsafe [53].
Within the network protocols, there is no specific routing protocol for different FANET applications that determine an efficient communication model between UAVs. Because of its high variability, homogeneity, and application range, there is no standardized and normalized protocol which can determine convergence in this network model implementation [73]. Currently, new routing protocols have been proposed based on fuzzy, hybrid, and stochastic systems, among others.
In Fig. 6, it is possible to demonstrate the advantage of implementing FANET in a scenario where not all UAVs require communication with the ground control (left side), but due to distances they associate and communicate to comply with the assigned task without having limitations (right side).

Figure 6: FANET. coordinated model
By understanding and addressing these key aspects, the characterization of FANET applications becomes clearer, demonstrating the versatility and utility of FANET in various contexts. The cited references provide a comprehensive foundation for exploring and optimizing FANET applications, ensuring effective and reliable communication in dynamic and challenging environments. FANET (Flying Ad Hoc Networks) is involved in various applications that demonstrate its versatility and utility in different contexts. The characterization of FANET applications is directly related to the way these networks can be used and implemented. This scheme is determined by considering several key aspects:
Mobility Models
Definition related: Mobility models describe how UAVs (Unmanned Aerial Vehicles) move within FANET. These models are essential for simulating and designing the network, as the movement patterns of UAVs directly affect network connectivity, performance, and reliability.
Types of Mobility Models:
• Random Mobility Models: In these models, UAVs move randomly within a defined area. This randomness can help simulate scenarios where UAVs do not follow predetermined paths, providing insights into how the network can handle unpredictable movements.
• Mission-Based Models: These models involve specific, planned movements based on tasks or missions. They are designed to simulate real-world applications where UAVs follow defined routes to complete specific objectives, such as surveillance, search and rescue, or delivery services.
Impact on the Network: Different mobility patterns significantly affect network connectivity and performance. Random movements may lead to frequent topology changes and potential connectivity issues, while mission-based movements can provide more predictable and stable network conditions.
Overview of Mobility Models in FANETs
Mobility models are fundamental to understanding how UAV movements influence FANET dynamics, especially given the unique requirements of aerial networks. Foundational studies, such as [6,10,12,13], analyze different mobility patterns, showing how UAV behavior impacts network connectivity and stability. These studies underscore the need for specialized models to handle the high mobility and adaptability required in FANETs.
Characteristics of Mobility Models
Various studies explore the specific characteristics of FANET mobility models, including their ability to adapt to dynamic environments and manage node dispersion. Research in [14,17,18,31] investigates how certain mobility characteristics, such as speed and altitude changes, affect link quality and network performance. These findings highlight the critical role of mobility models in ensuring reliable communication under fluctuating conditions.
Impact of UAV Movements on Network Dynamics
The influence of UAV movements on FANET topology and performance is another area of focus. Studies like [19,24,32,36] reveal how different movement patterns can lead to frequent topology changes, affecting network latency and packet delivery rates. This research emphasizes the importance of designing FANETs with mobility models that can sustain efficient data transmission despite high mobility.
Advanced Mobility Model Techniques
To address the complex demands of FANETs, advanced techniques are being developed to optimize UAV mobility. Studies such as [48,63,64] propose predictive models and adaptive algorithms that adjust UAV trajectories in real time, based on network requirements. These approaches enhance network stability and responsiveness, critical in high-stakes applications like disaster response and surveillance.
Future Research Directions in Mobility Models
Emerging research in mobility models for FANETs aims to create more robust and flexible network designs. References [66,71] discuss innovative approaches, such as swarm intelligence and machine learning-driven models, which have the potential to further improve FANET adaptability. These studies provide a roadmap for developing next-generation mobility solutions that can support increasingly complex FANET applications.
QoS & QoE
Definition and Importance: QoS (Quality of Service) and QoE (Quality of Experience) are important metrics for evaluating FANET performance. QoS focuses on the technical performance aspects of the network, while QoE measures the end-user perception of service quality.
QoS Metrics:
• Delay: The time it takes for data to travel from the sender to the receiver.
• Jitter: The variation in packet arrival times.
• Packet Loss Rate: The percentage of packets that are lost during transmission.
• Bandwidth: The data transmission capacity of the network.
QoE Metrics:
• End-User Perception: The subjective experience of users regarding the quality of service, which can include factors such as video clarity, audio quality, and overall satisfaction with the network performance.
Improvements in QoS and QoE: Strategies to enhance communication quality and user experience include optimizing routing protocols, implementing efficient data transmission techniques, and improving network management practices.
Importance of QoS in FANET
Studies such as [12,14,23,39] underscore the importance of Quality of Service (QoS) in FANET networks, examining factors like latency, bandwidth, and packet delivery. These studies emphasize that maintaining high QoS is critical to ensuring stable communication in FANET applications, especially in scenarios that demand real-time data transmission.
Evaluation and Measurement of QoS Metrics
Research in [27,31,33] delves into methods for measuring and evaluating QoS within FANETs, offering insights into metrics such as jitter and packet loss rate. These analyses highlight how continuous monitoring and dynamic adjustments in QoS parameters can enhance network performance and ensure reliable communication under varying operational conditions.
Enhancing Quality of Experience (QoE) in FANET
Quality of Experience (QoE) is equally essential, focusing on end-user satisfaction and the overall reliability of the network. Studies like [35,48,63] explore strategies to improve QoE, such as optimizing video clarity and reducing transmission delays, which are crucial for applications that involve multimedia data, like surveillance and rescue operations.
Advanced Techniques for Improving QoS and QoE
Recent research, including [64,65,71] investigates advanced techniques to enhance both QoS and QoE, such as adaptive routing protocols and intelligent data prioritization. These approaches help FANETs maintain high performance and user satisfaction by dynamically responding to network conditions and adjusting data flow as needed [3,39].
Security
Definition and Importance: Security is a critical aspect of FANET due to the open and dynamic nature of the network. Ensuring the security of communication and data transmission in FANET is essential to protect against potential threats and vulnerabilities. The security mechanisms in FANET focus on ensuring data authenticity, confidentiality, and integrity through cryptographic methods. It is important to consider that security in FANET is still an evolving area due to the network’s dynamic topology, which can lead to weak connectivity because of resource limitations and the physical protection at each node. FANET networks are susceptible to attacks, making secure communication a challenge due to several factors: a) The shared wireless medium, which imposes bandwidth limitations; b) The absence of intrinsic defense mechanisms; c) The network’s dynamic and self-organizing nature, with variable link establishment capabilities; d) The flow of control and data messages within a broadcasting topology, moving hop by hop; and e) Nodes being constrained by onboard features and battery life.
Regarding data protection mechanisms in FANETs, it is determined that these must be well-designed and adjusted to such scenarios to significantly reduce the probability of data being compromised, regardless of the malicious technique involved. FANET nodes are unmanned aerial vehicles (UAVs) that collaborate in ad hoc mode through Line-of-Sight (LoS) links; alternatively, they can communicate with control schemes at fixed ground stations or with an air traffic controller via a Non-Line-of-Sight (NLoS) link. This versatility makes FANETs useful in various scenarios within Smart Cities, disaster recovery activities, environmental monitoring, cooperative security, among others. It is crucial to consider that these scenarios often require multimedia content handling, which plays a critical role in rescue and aid activities based on visual information. However, FANETs lack effective security mechanisms because developers focus more on determining architectural topological schemes and efficient routing mechanisms. Nevertheless, this does not limit their applicability since their deployment environment and diverse uses in critical missions like military operations, disaster management, and rescue operations make them highly attractive. Security is one of the most important issues to address in FANETs, and the implementation of trust management within the topology is considered to enhance cooperation and improve network security. With the support of the trust mechanism, network entities will decide how much they can trust other entities within the network. It is essential to understand that in MANETs, nodes can be entities such as animals, mobile devices, or moving people, while in VANETs, nodes are moving cars. In FANETs, nodes are UAVs, making their characteristics different compared to MANETs and VANETs in terms of speed, topologies, and security.
Main Security Threats and Vulnerabilities:
• Eavesdropping: Unauthorized interception of data transmitted over the network.
• Jamming: Disruption of communication by interfering with the signal.
• Spoofing: Sending fake signals to deceive the network or manipulate data.
Security Mechanisms:
• Encryption: Techniques to protect data by converting it into a secure format that can only be read by authorized parties.
• Authentication: Methods to verify the identity of devices and users in the network.
• Secure Routing: Ensuring that data routes are reliable and secure, protecting against potential attacks and ensuring the integrity of the communication.
Methods and research: The studies reviewing and explore various security threats, vulnerabilities, and mechanisms, providing comprehensive insights into how FANET can be secured against different types of attacks these security aspects [43,48,49,64,66].
Network Protocols
Definition and Importance: Network protocols in FANET are essential for managing communication among UAVs. These protocols define how data is transmitted, received, and processed within the network, ensuring efficient and reliable communication.
Types of Network Protocols:
• Routing Protocols: Specifically designed for FANET, such as AODV (Ad Hoc On-Demand Distance Vector) and DSR (Dynamic Source Routing). These protocols determine the best paths for data transmission based on network conditions.
• MAC Protocols: Medium Access Control protocols ensure efficient, collision-free communication by managing how devices access the communication medium [57].
Challenges and Solutions: FANET poses unique challenges that require adaptations of traditional protocols. These challenges include frequent topology changes, limited energy resources, and varying communication ranges. Solutions involve designing protocols that can dynamically adapt to these conditions, optimizing performance, and ensuring reliability.
Research Reviewed: The studies covering these aspects and the references provide in-depth analyses of network protocols, highlighting the challenges and solutions specific to FANET and offering insights into how these protocols can be optimized for better performance [15,47,49,66,71].
In this we have added a review for establish the conclusion that outlines the key advancements made by this research, including the novel routing mechanisms, enhanced mobility models, and the integration of SDN (Software Defined Networking) for improved control of network traffic in FANET environments.
When addressing future FANET applications where UAVs are necessarily involved, several utilities are expected for this type of network mechanism. These devices are becoming increasingly versatile and useful by supporting and solving not only military or civilian tasks, but also directly benefiting human beings [74], particularly in IoT applications, where constant use of this technology is required to improve aspects of basic living [25,67]. Among the many uses of drones, some involve drones taking control of vehicular traffic or carrying passenger luggage at any type of transport terminal; supporting the care and protection of flora and fauna; monitoring infrastructures under construction; transporting first aid elements in flagrante delicto and emergencies, as well as firefighting rescues; locating people in geographically inaccessible areas; providing support in humanitarian social conflicts, and providing citizen security and surveillance processes [53]. Additionally, some drones take photographs of tourists and social events, as they are available at mass access shows [44], as well as providing these mechanisms for transporting people and other significant advances expected from these unmanned aerial vehicles. This technology can even be used in industrial processes, where surveillance of procedures or inspection of hard-to-reach areas by human’s reduces potential accidents [75].
We have significantly expanded the section on FANET’s practical applications. In addition to military uses, we have included civil applications such as precision agriculture, environmental monitoring, disaster rescue operations, and public safety surveillance. These scenarios illustrate how FANET can be implemented in real-world situations, providing more tangible examples, in functional form, see the Fig. 7, and see the Fig. 8 for its applications in environments. A number of examples of a functional form of FANET can be seen in Fig. 9. An additional application of FANET in environments can be found in Fig. 10.

Figure 7: FANET. hybrid model

Figure 8: FANET devices managed by a non-mobile device vs. managed by mobile device

Figure 9: FANET examples functional form

Figure 10: FANET applications in environments
Experts predict that drone-related technologies will improve and evolve to the point where commercial drones can be integrated into daily activities within and outside cities, with a permanent presence in various activities ranging from agriculture, industry, tourism, marketing, social events, and accident prevention, among others [76]. Currently, there are large and influential technologies and mass-market companies that have invested in these types of tools; some of these companies are well recognized such as Facebook, Walmart, Amazon, and Google, as well as real estate companies, film industry, agricultural industry, photography, construction, police forces, firefighters, or other companies according to their need, relevance, and application; this is where FANET communication networks will be established to provide support and solutions to tasks involving drones [77]. All indications suggest that this model of work and collaboration is supporting current and future work and education schemes related to the use, exploitation, and application of goods, networks, and services; these are ubiquitous, omnipresent, and convergent in technological, commercial, and social contexts, sup-porting logistical collaboration efforts in all contexts, especially supporting management, control, and surveillance tasks in environments characterized by humanitarian, educational, and other daily actions that must be performed by the vast majority of people according to their needs [2,78]. Genuinely, the provision of this type of technology becomes the pillar and basic technological element for the technical composition required by the model of an E-Society, which in turn seeks to enhance itself with the existence of many other axes of evolution and improvements in the concept of quality-of-life management, which are part of the solid reference for constructing the smart city model [54,79].
This work has expanded the discussion on future perspectives to include FANET’s potential as a supporting infrastructure for 6G/7G networks. These networks will offer greater bandwidth and lower latency, making them ideal for large-scale UAV operations. FANET’s ability to integrate with these advanced networks is critical for future developments in autonomous systems and real-time applications.
This part has been revised to clearly articulate the contributions of the paper, such as the novel routing strategies proposed for FANETs and the methodological advances in handling dynamic topologies in 3D environments. The paper’s contribution to the field of UAV communication networks is now highlighted more explicitly.
In this work, the research has helped to get a clarified state and show how this paper builds upon previous surveys by introducing new perspectives on FANET’s integration with emerging technologies like SDN and its application in future networks like 6G/7G. We emphasize that our work focuses on the practical implications of these technologies and provides more detailed simulation results in high-mobility environments.
To have related the SDN concept is important, because it is necessary, and this has been added, explaining how SDN can optimize the management of FANET by enabling centralized control of dynamic topologies. This section references relevant literature, including the recommended paper on SDN and FANET (see Fig. 11).

Figure 11: FANET and SDN concepts
It is decisive that at the implementation level, a way of building a convergent network that is determined in characteristics from the MANET model to the FANET is quickly and simply considered, although there is a close relationship. This idea is conceptualized when at the support level, the mechanisms that embed the control schemes and light interfaces (such as smartphones and tablets), are selected as the management or control support of said model, which indicates that there is, functionally speaking, a support and composition relationship between MANET and FANET. This is because the implementation and configuration of a MANET network can help the composition of a FANET swarm, and the devices that conform said MANET network, defined as structural nodes that can be connected in relation to the FANET network, determined as interconnection elements that provide service to mobile devices or UAVs that conform the swarms of the mentioned model to conduct some type of task.
FANET network requires a structured way of layered protocol concepts, which define processes from network access mechanisms to routing procedures; therefore, it can handle congestion events in densely populated network schemes and sustain reliable exchange of messages and information continuously and accurately.
In this type of networks, the segmentation and grouping methods in the form of clusters can be considered, which produces the idea of swarms. The information flow is controlled and this unnecessary data flooding process that represents a large network load can be avoided. To avoid the simultaneous connections number limitation, as well as other intrinsic parameters that are defined in the communication models, such as the handling of the routing hops and the communication between swarms, is secured; it is possible to have a larger type of cluster or swarm that can group similar ones. This also defines that there is a hierarchy model in the network nodes grouping, which allows the introduction of organizational forms, such as the tree structure, that defines the data exchange between hierarchical objects.
This research contributes significantly to the field of UAV communication networks by providing new insights into the optimization of routing protocols specifically designed for FANETs. It addresses the unique challenges posed by the high mobility and dynamic topology of these systems. The study identifies improvements in communication efficiency and scalability within FANETs, enhancing the understanding of how to effectively manage the interconnection of multiple UAVs in various applications. These contributions not only advance the current state of research in FANET but also offer a practical framework for future technological applications in this domain.
The proposed FANET model addresses the scalability issue in large networks with numerous UAVs through several key strategies:
1. Adaptive Routing Protocols: Dynamic routing protocols are implemented that can adapt to changes in the network topology. These protocols are designed to optimize data flow between UAVs, ensuring that communication remains efficient even as devices are added or removed from the network.
2. Clustering and Segmentation: Clustering methods are used to organize UAVs into groups. This segmentation not only facilitates traffic management but also reduces network load by allowing UAVs within a cluster to communicate directly with each other before sending data to other groups.
3. Congestion Management: The model includes mechanisms to manage network congestion, ensuring that service quality is maintained even under high UAV density conditions. This is achieved through continuous monitoring of network load and traffic redistribution when necessary.
4. Self-Configuration Capability: UAVs in the FANET can auto-configure and reconfigure, allowing for horizontal scalability. This means new UAVs can be added without significantly disrupting the functioning of the existing network.
5. Integration with Emerging Technologies: The model also considers integration with emerging technologies, such as 5G, which offer greater capacity and data transfer speeds. This not only enhances scalability but also enables the handling of an even larger number of UAVs within the network.
While this paper discusses the potential applications of FANET, it is crucial to highlight specific areas for future research that could enhance the development of this technology. One significant avenue for exploration is the creation of advanced routing protocols tailored to the unique challenges of FANETs, particularly in dynamic environments. Additionally, the integration of FANET with emerging technologies, such as 5G, presents a promising area for further investigation. This convergence could facilitate improved communication capabilities and real-time data processing, ultimately leading to more efficient and robust UAV networks. By focusing on these areas, future research can contribute to the evolution of FANETs and their applications in various fields.
Acknowledgement: Authors would like to thank the Universidad Santiago de Cali for supporting this research and the publication of the results.
Funding Statement: This research has been funded by Dirección General de Investigaciones of Universidad Santiago de Cali under call No. 01-2024.
Author Contributions: Project administration and writing—review, Jesús Hamilton Ortiz; supervision and writing—editing, Carlos Andrés Tavera Romero; investigation and writing—original draft, Andrés Hernando Aristizábal Montufar and Luis Carlos Rodríguez Timaná; resources and methodology, Fernando Vélez Varela; software and data curation, Javier Arturo Gamboa Cruzado. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the corresponding author, C. A. T. R., upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. B. O. Sadiq, A. E. Adedokun, M. B. Mu’azu, and Y. A. Sha’aban, “A specific routing protocol for flying Adhoc network,” Telkomnika (Telecommun. Comput. Electron. Control), vol. 16, no. 2, Apr. 2018, Art. no. 8444. doi: 10.12928/TELKOMNIKA.v16i2.8444. [Google Scholar] [CrossRef]
2. F. Liu, J. Huang, and X. Wang, “Joint task offloading and resource allocation for device-edge-cloud collaboration with subtask dependencies,” IEEE Trans. Cloud Comput., vol. 11, no. 3, Jul. 2023, Art. no. 10058006. doi: 10.1109/TCC.2023.3251561. [Google Scholar] [CrossRef]
3. P. Pandey and R. Singh, “Impact of selfish nodes on the performance of AODV and DSR routing protocols,” Commun. Comput. Inf. Sci., vol. 1797, no. 9, pp. 349–361, Mar. 2023. doi: 10.1007/978-3-031-28180-8_23. [Google Scholar] [CrossRef]
4. S. W. Nourildean, Y. A. Mohammed, and H. A. Attallah, “Virtual local area network performance improvement using ad hoc routing protocols in a wireless network,” Computers, vol. 12, no. 2, Jan. 2023, Art. no. 28. doi: 10.3390/COMPUTERS12020028. [Google Scholar] [CrossRef]
5. Q. Xiaohan and Y. Zhihua, “A Multi-MCDS scheduling based virtual backbone network construction and maintenance algorithm in FANET,” MATEC Web Conf., vol. 189, no. 4, Aug. 2018, Art. no. 03013. doi: 10.1051/matecconf/201818903013. [Google Scholar] [CrossRef]
6. D. Liu et al., “A coalition-based communication framework for task-driven flying ad-hoc networks,” Netw. Internet Arch., Jun. 2020, Art. no. 896. doi: 10.48550/arXiv.1812.00896. [Google Scholar] [CrossRef]
7. A. Guillen-Perez and M. -D. Cano, “Flying ad hoc networks: A new domain for network communications,” Sensors, vol. 18, no. 10, Oct. 2018, Art. no. 3571. doi: 10.3390/s18103571. [Google Scholar] [PubMed] [CrossRef]
8. J. V. Ananthi and P. S. H. Jose, “Mobility management UAV-based Grouping routing protocol in flying ad hoc networks for biomedical applications,” Int. J. Commun. Syst., vol. 36, no. 1, Jan. 2023, Art. no. e5362. doi: 10.1002/DAC.5362. [Google Scholar] [CrossRef]
9. T. Tamilvizhi, R. Surendran, C. Andres Tavera Romero, and M. Sadish Sendil, “Privacy preserving reliable data transmission in cluster based vehicular adhoc networks,” Intell. Autom. Soft Comput., vol. 34, no. 2, May 2022, Art. no. 47659. doi: 10.32604/iasc.2022.026331. [Google Scholar] [CrossRef]
10. S. Rosati, K. Krużelecki, G. Heitz, D. Floreano, and B. Rimoldi, “Dynamic routing for flying ad hoc networks,” IEEE Trans. Veh. Technol., vol. 65, no. 3, Mar. 2016, Art. no. 7069210. doi: 10.1109/TVT.2015.2414819. [Google Scholar] [CrossRef]
11. V. A. Vuyyuru, Y. Alotaibi, N. Veeraiah, S. Alghamdi, and K. Sirisha, “EsECC_SDN: Attack detection and classification model for MANET,” Comput. Mater. Contin., vol. 74, no. 3, pp. 6665–6688, Dec. 2022. doi: 10.32604/CMC.2023.032140. [Google Scholar] [CrossRef]
12. B. Sadiq, E. Adedokun, Mu’azu, and Y. Shaaban, “A feasibility study of using light fidelity with multiple unmanned aerial vehicles (UAVs) for indoor collaborative and cooperative networking,” in Annu. Conf. School Eng. Eng. Technol. (SEET), Akure, Nigeria, Jul. 2017. Accessed: Dec. 18, 2024. [Online]. Available: https://age.futa.edu.ng/home/publications/967 [Google Scholar]
13. J. Souza, J. Jailton, T. Carvalho, J. Araújo, R. Francês and Z. Kaleem, “A proposal for routing protocol for FANET: A fuzzy system approach with QoE/QoS guarantee,” Wirel. Commun. Mob. Comput., vol. 2019, no. 3, 2019, Art. no. 8709249. doi: 10.1155/2019/8709249. [Google Scholar] [CrossRef]
14. W. Alnumay, U. Ghosh, and P. Chatterjee, “A trust-based predictive model for mobile ad hoc network in internet of things,” Sensors, vol. 19, no. 6, Mar. 2019, Art. no. 1467. doi: 10.3390/s19061467. [Google Scholar] [PubMed] [CrossRef]
15. T. Kim, S. Lee, K. H. Kim, and Y. -I. Jo, “FANET routing protocol analysis for Multi-UAV-Based reconnaissance mobility models,” Drones, vol. 7, no. 3, Feb. 2023, Art. no. 161. doi: 10.3390/drones7030161. [Google Scholar] [CrossRef]
16. Z. Xiao et al., “A survey on millimeter-wave beamforming enabled UAV communications and networking,” IEEE Commun. Surv. Tutorials, vol. 24, no. 1, Nov. 2022, Art. no. 9598918. doi: 10.1109/COMST.2021.3124512. [Google Scholar] [CrossRef]
17. E. Barka, C. A. Kerrache, R. Hussain, N. Lagraa, A. Lakas and S. H. Bouk, “A trusted lightweight communication strategy for flying named data networking,” Sensors, vol. 18, no. 8, Aug. 2018, Art. no. 2683. doi: 10.3390/s18082683. [Google Scholar] [PubMed] [CrossRef]
18. S. Wen and C. Huang, “Delay-constrained routing based on stochastic model for flying ad hoc networks,” Mob. Inf. Syst., vol. 2018, Aug. 2018, Art. no. 6056419. doi: 10.1155/2018/6056419. [Google Scholar] [CrossRef]
19. L. Wang, F. Zhu, Q. Zhou, K. Li, and L. Liu, “PB: A message transmission method based on area layer division in UAV networks,” Int. J. Aerosp. Eng., vol. 2019, no. 5, Nov. 2019, Art. no. 2592189. doi: 10.1155/2019/2592189. [Google Scholar] [CrossRef]
20. S. Hosseinalipour et al., “Multi-stage hybrid federated learning over large-scale D2D-enabled fog networks,” IEEE/ACM Trans. Netw., vol. 30, no. 4, Aug. 2022, Art. no. 9705093. doi: 10.1109/TNET.2022.3143495. [Google Scholar] [CrossRef]
21. Z. Kaleem and M. H. Rehmani, “Amateur drone monitoring: State-of-the-art architectures, key enabling technologies, and future research directions,” IEEE Wirel. Commun., vol. 25, no. 2, Apr. 2018, Art. no. 8353365. doi: 10.1109/MWC.2018.1700152. [Google Scholar] [CrossRef]
22. H. Rajab, H. Al-Amaireh, T. Bouguera, and T. Cinkler, “Evaluation of energy consumption of LPWAN technologies,” EURASIP J. Wirel. Commun. Netw., vol. 2023, no. 1, Dec. 2023, Art. no. 118. doi: 10.1186/s13638-023-02322-8. [Google Scholar] [CrossRef]
23. H. Yang and Z. Liu, “An optimization routing protocol for FANETs,” EURASIP J. Wirel. Commun. Netw., vol. 2019, no. 1,May 2019, Art. no. 120. doi: 10.1186/s13638-019-1442-0. [Google Scholar] [CrossRef]
24. N. Samir Labib, G. Danoy, J. Musial, M. R. Brust, and P. Bouvry, “Internet of unmanned aerial vehicles—A multilayer low-altitude airspace model for distributed UAV traffic management,” Sensors, vol. 19, no. 21, Nov. 2019, Art. no. 4779. doi: 10.3390/s19214779. [Google Scholar] [PubMed] [CrossRef]
25. F. Pasandideh, J. P. J. da Costa, R. Kunst, W. Hardjawana, and E. P. de Freitas, “A systematic literature review of flying ad hoc networks: State-of-the-art, challenges, and perspectives,” J. Field Robot., vol. 40, no. 4, Jun. 2023, Art. no. 22157. doi: 10.1002/rob.22157. [Google Scholar] [CrossRef]
26. S. Jing and C. Xiao, “Federated learning via over-the-air computation with statistical channel state information,” IEEE Trans. Wirel. Commun., vol. 21, no. 11, Nov. 2022, Art. no. 9780892. doi: 10.1109/TWC.2022.3175887. [Google Scholar] [CrossRef]
27. P. Cumino, K. Maciel, T. Tavares, H. Oliveira, D. Rosário and E. Cerqueira, “Cluster-based control plane messages management in software-defined flying ad-hoc network,” Sensors, vol. 20, no. 1, Dec. 2020, Art. no. 67. doi: 10.3390/s20010067. [Google Scholar] [PubMed] [CrossRef]
28. J. Yao, W. Xu, Z. Yang, X. You, M. Bennis and H. V. Poor, “Digital versus analog transmissions for federated learning over wireless networks,” in IEEE Int. Conf. Commun., Denver, CO, USA, Institute of Electrical and Electronics Engineers Inc, Feb. 2024. doi: 10.1109/ICC51166.2024.10622187. [Google Scholar] [CrossRef]
29. A. R. Deshmukh, P. Nirmal, and S. S. Dorle, “A new approach for position based routing protocols based on ant colony optimization (ACO) technique in vehicular ad hoc network (VANET),” in Int. Conf. Intell. Technol., CONIT 2021, Hubli, India, Institute of Electrical and Electronics Engineers Inc., Jun. 2021. doi: 10.1109/CONIT51480.2021.9498332. [Google Scholar] [CrossRef]
30. F. Aadil, A. Raza, M. F. Khan, M. Maqsood, I. Mehmood and S. Rho, “Energy aware cluster-based routing in flying ad-hoc networks,” Sensors, vol. 18, no. 5, May 2018, Art. no. 1413. doi: 10.3390/s18051413. [Google Scholar] [PubMed] [CrossRef]
31. A. Bujari, C. E. Palazzi, and D. Ronzani, “FANET application scenarios and mobility models,” in Proc. 3rd Workshop Micro Aerial Veh. Netw., Syst., Appl., New York, NY, USA, Association for Computing Machinery, Jun. 2017, pp. 43–46. doi: 10.1145/3086439.3086440. [Google Scholar] [CrossRef]
32. V. Sharma and R. Kumar, “G-FANET: An ambient network formation between ground and flying ad hoc networks,” Telecommun. Syst., vol. 65, no. 1, pp. 31–54, Aug. 2017. doi: 10.1007/s11235-016-0210-2. [Google Scholar] [CrossRef]
33. Y. Ben Chigra, A. Ghadi, and M. Bouhorma, “Mobility based study of routing protocols in mobile ad hoc network,” in Proc. Mediterr. Symp. Smart City Appl., New York, NY, USA, Association for Computing Machinery, Oct. 2017, pp. 1–6. doi: 10.1145/3175628.3175652. [Google Scholar] [CrossRef]
34. A. M. Bagirov, R. M. Aliguliyev, and N. Sultanova, “Finding compact and well-separated clusters: Clustering using silhouette coefficients,” Pattern Recognit., vol. 135, Mar. 2023, Art. no. 109144. doi: 10.1016/J.PATCOG.2022.109144. [Google Scholar] [CrossRef]
35. J. Jailton, T. Carvalho, J. Araújo, and R. Francês, “Relay positioning strategy for traffic data collection of multiple unmanned aerial vehicles using hybrid optimization systems: A FANET-based case study,” Wirel. Commun. Mob. Comput., vol. 2017, no. 1, Dec. 2017, Art. no. 2865482. doi: 10.1155/2017/2865482. [Google Scholar] [CrossRef]
36. T. Ahn, J. Seok, I. Lee, and J. Han, “Reliable flying IoT networks for UAV disaster rescue operations,” Mobile Inform. Syst., vol. 2018, no. 3, Aug. 2018, Art. no. 2572460. doi: 10.1155/2018/2572460. [Google Scholar] [CrossRef]
37. I. Bekmezci, E. Şentürk, and T. Türker, “View of SECURITY ISSUES IN FLYING AD-HOC NETWORKS (FANETs),” J. Aeronaut. Space Technol., vol. 9, no. 2, pp. 13–21, Jun. 2016. [Google Scholar]
38. J. Zhang et al., “A location and velocity prediction-assisted FANET networking scheme for highly mobile scenarios,” Electronics, vol. 12, no. 12, Jun. 2023, Art. no. 2731. doi: 10.3390/ELECTRONICS12122731. [Google Scholar] [CrossRef]
39. J. Huang, F. Liu, and J. Zhang, “Multi-dimensional QoS evaluation and optimization of mobile edge computing for IoT: A survey,” Chin. J. Electron., vol. 33, no. 4, Jul. 2024, Art. no. 10606193. doi: 10.23919/CJE.2023.00.264. [Google Scholar] [CrossRef]
40. N. Subramani, P. Mohan, Y. Alotaibi, S. Alghamdi, and O. I. Khalaf, “An efficient metaheuristic-based clustering with routing protocol for underwater wireless sensor networks,” Sensors, vol. 22, no. 2, Jan. 2022, Art. no. 415. doi: 10.3390/S22020415. [Google Scholar] [PubMed] [CrossRef]
41. J. Jayaudhaya, R. Jayaraj, and K. Ramash Kumar, “A new integrated approach for cloud service composition and sharing using a hybrid algorithm,” Math. Probl. Eng., vol. 2024, no. 1, Jan. 2024, Art. no. 3136546. doi: 10.1155/2024/3136546. [Google Scholar] [CrossRef]
42. M. Azizi, M. Baghalzadeh Shishehgarkhaneh, M. Basiri, and R. C. Moehler, “Squid game optimizer (SGOA novel metaheuristic algorithm,” Sci. Rep., vol. 13, no. 1, Apr. 2023, Art. no. 5373. doi: 10.1038/s41598-023-32465-z. [Google Scholar] [PubMed] [CrossRef]
43. E. Barka, C. A. Kerrache, N. Lagraa, A. Lakas, C. T. Calafate and J. -C. Cano, “UNION: A trust model distinguishing intentional and unintentional misbehavior in inter-UAV communication,” J. Adv. Transp., vol. 2018, pp. 1–12, Apr. 2018, Art. no. 7475357. doi: 10.1155/2018/7475357. [Google Scholar] [CrossRef]
44. D. Zhang, G. Sun, J. Zhang, T. Zhang, and P. Yang, “Offloading approach for mobile edge computing based on chaotic quantum particle swarm optimization strategy,” J. Ambient Intell. Humaniz Comput, vol. 14, no. 10, pp. 14333–14347, Aug. 2023. doi: 10.1007/s12652-023-04672-z. [Google Scholar] [CrossRef]
45. Y. Guo, H. Tang, and R. Qin, “A low complexity persistent reconnaissance algorithm for FANET,” Sensors, vol. 22, no. 23, Dec. 2022, Art. no. 9526. doi: 10.3390/s22239526. [Google Scholar] [PubMed] [CrossRef]
46. N. Garg, T. Ratnarajah, V. M. Vakamulla, and M. Sellathurai, “Distributed transceiver design for decentralized estimation in coexisting IoT networks,” IEEE Internet Things J., vol. 11, no. 8, Apr. 2024, Art. no. 10367979. doi: 10.1109/JIOT.2023.3345802. [Google Scholar] [CrossRef]
47. G. A. QasMarrogy, “FANET drone’s 4K data applications, mobility models and Wi-Fi IEEE802.11n standards,” J. Telecommun. Inf. Technol., vol. 83, no. 1, Mar. 2021, Art. no. 452. doi: 10.26636/jtit.2021.148520. [Google Scholar] [CrossRef]
48. K. Singh and A. K. Verma, “A fuzzy-based trust model for flying ad hoc networks (FANETs),” Int. J. Commun. Syst., vol. 31, no. 6, Jan. 2018, Art. no. e3517. doi: 10.1002/dac.3517. [Google Scholar] [CrossRef]
49. J. H. Ortiz, C. A. Tavera Romero, B. T. Ahmed, and O. I. Khalaf, “QoS in FANET business and swarm data,” Comput. Mater. Contin., vol. 72, no. 1, pp. 1878–1899, Feb. 2022. doi: 10.32604/cmc.2022.023796. [Google Scholar] [CrossRef]
50. O. T. Abdulhae, J. S. Mandeep, and M. Islam, “Cluster-based routing protocols for flying ad hoc networks (FANETs),” IEEE Access, vol. 10, no. 3, Mar. 2022, Art. no. 9739713. doi: 10.1109/ACCESS.2022.3161446. [Google Scholar] [CrossRef]
51. Y. Shao et al., “Clustering algorithm based on the ground-air cooperative architecture in border patrol scenarios,” Electronics, vol. 11, no. 18, Sep. 2022, Art. no. 2876. doi: 10.3390/electronics11182876. [Google Scholar] [CrossRef]
52. M. F. Khan, K. L. A. Yau, R. M. Noor, and M. A. Imran, “Routing schemes in FANETs: A survey,” Sensors, vol. 20, no. 1, Dec. 2019, Art. no. 38. doi: 10.3390/s20010038. [Google Scholar] [PubMed] [CrossRef]
53. J. A. Besada, D. Carramiñana, L. Bergesio, I. Campaña, and A. M. Bernardos, “Modelling and simulation of collaborative surveillance for unmanned traffic management,” Sensors, vol. 22, no. 4, Feb. 2022, Art. no. 1498. doi: 10.3390/s22041498. [Google Scholar] [PubMed] [CrossRef]
54. Y. Zhang, H. Xu, Y. Zhang, and H. Xu, “Distributed data-driven learning-based optimal dynamic resource allocation for multi-RIS-assisted multi-user ad-hoc network,” Algorithms, vol. 17, no. 1, Jan. 2024, Art. no. 45. doi: 10.3390/a17010045. [Google Scholar] [CrossRef]
55. T. R. Beegum, M. Y. I. Idris, M. N. Bin Ayub, and H. A. Shehadeh, “Optimized routing of UAVs using bio-inspired algorithm in FANET: A systematic review,” IEEE Access, vol. 11, no. 2, Feb. 2023, Art. no. 10041916. doi: 10.1109/ACCESS.2023.3244067. [Google Scholar] [CrossRef]
56. A. S. Parihar and A. Pandey, “Proposing a novel key agreement protocol for flying ad-hoc network,” in ACM 15th Int. Conf. Contem. Comput., Association for Computing Machinery, Sep. 2023, pp. 711–715. doi: 10.1145/3607947.3608087. [Google Scholar] [CrossRef]
57. J. Tiwari, A. Prakash, and R. Tripathi, “An adaptive and cooperative MAC protocol for safety applications in cognitive radio enabled vehicular ad-hoc networks,” Ad Hoc Netw., vol. 138, no. 9, Jan. 2023, Art. no. 103019. doi: 10.1016/j.adhoc.2022.103019. [Google Scholar] [CrossRef]
58. Y. Cui, Q. Zhang, Z. Feng, Z. Wei, C. Shi and H. Yang, “Topology-aware resilient routing protocol for FANETs: An adaptive Q-learning approach,” IEEE Internet Things J., vol. 9, no. 19, Oct. 2022, Art. no. 9744096. doi: 10.1109/JIOT.2022.3162849. [Google Scholar] [CrossRef]
59. F. Liu, H. Yu, J. Huang, and T. Taleb, “Joint service migration and resource allocation in edge IoT system based on deep reinforcement learning,” IEEE Internet Things J., vol. 11, no. 7, Apr. 2024, Art. no. 10317883. doi: 10.1109/JIOT.2023.3332421. [Google Scholar] [CrossRef]
60. A. K. Abasi et al., “Lemurs optimizer: A new metaheuristic algorithm for global optimization,” Appl. Sci., vol. 12, no. 19, Oct. 2022, Art. no. 10057. doi: 10.3390/app121910057. [Google Scholar] [CrossRef]
61. J. Huang et al., “Incentive mechanism design of federated learning for recommendation systems in MEC,” IEEE Trans. Consum. Electron., vol. 70, no. 1, Feb. 2024, Art. no. 10356897. doi: 10.1109/TCE.2023.3342187. [Google Scholar] [CrossRef]
62. S. Bharany, S. Sharma, S. Bhatia, M. K. I. Rahmani, M. Shuaib and S. A. Lashari, “Energy efficient clustering protocol for FANETS using moth flame optimization,” Sustainability, vol. 14, no. 10, May 2022, Art. no. 6159. doi: 10.3390/su14106159. [Google Scholar] [CrossRef]
63. K. Singh and A. Verma, “FCTM: A novel fuzzy classification trust model for enhancing reliability in flying Ad Hoc networks (FANETs),” Ad Hoc Sens. Wirel. Netw., vol. 40, no. 1–2, pp. 23–47, Dec. 2018. [Google Scholar]
64. W. Ahsan et al., “Optimized node clustering in VANETs by using meta-heuristic algorithms,” Electronics, vol. 9, no. 3, Feb. 2020, Art. no. 394. doi: 10.3390/electronics9030394. [Google Scholar] [CrossRef]
65. E. E. Ulku, B. Dogan, O. Demir, and I. Bekmezci, “Sharing location information in multi-UAV systems by common channel multi-token circulation method in FANETs,” Elektron. Elektrotech., vol. 25, no. 1, Feb. 2019, Art. no. 22738. doi: 10.5755/j01.eie.25.1.22738. [Google Scholar] [CrossRef]
66. Y. Zhu, C. Li, J. Tang, and B. Luo, “Quality-aware feature aggregation network for robust RGBT tracking,” IEEE Trans. Intell. Veh., vol. 6, no. 1, Mar. 2021, Art. no. 9035457. doi: 10.1109/TIV.2020.2980735. [Google Scholar] [CrossRef]
67. J. Lansky et al., “An energy-aware routing method using firefly algorithm for flying ad hoc networks,” Sci. Rep., vol. 13, no. 1, Jan. 2023, Art. no. 1323. doi: 10.1038/s41598-023-27567-7. [Google Scholar] [PubMed] [CrossRef]
68. F. Delavernhe, A. Rossi, and M. Sevaux, “An online method for robust target tracking using a wireless sensor network,” Expert. Syst. Appl., vol. 230, no. 2, Nov. 2023, Art. no. 120549. doi: 10.1016/j.eswa.2023.120549. [Google Scholar] [CrossRef]
69. M. A. Khan, I. M. Qureshi, and F. Khanzada, “A hybrid communication scheme for efficient and low-cost deployment of future flying ad-hoc network (FANET),” Drones, vol. 3, no. 1, Feb. 2019, Art. no. 16. doi: 10.3390/drones3010016. [Google Scholar] [CrossRef]
70. M. A. Khan, I. M. Qureshi, I. Ullah, S. Khan, F. Khanzada and F. Noor, “An efficient and provably secure certificateless blind signature scheme for flying ad-hoc network based on multi-access edge computing,” Electronics, vol. 9, no. 1, Dec. 2020, Art. no. 30. doi: 10.3390/electronics9010030. [Google Scholar] [CrossRef]
71. Q. Guo, J. Yan, and W. Xu, “Localized fault tolerant algorithm based on node movement freedom degree in flying ad hoc networks,” Symmetry, vol. 11, no. 1, Jan. 2019, Art. no. 106. doi: 10.3390/sym11010106. [Google Scholar] [CrossRef]
72. V. Crann, P. Amiri, S. Knox, and W. Crowther, “Decentralized deconfliction of aerial robots in high intensity traffic structures,” J. Field Robot., vol. 41, no. 5, Apr. 2024, Art. no. 22340. doi: 10.1002/rob.22340. [Google Scholar] [CrossRef]
73. V. R. Challa, M. Gupta, A. Ratnoo, and D. Ghose, “Multiple lane UAV corridor planning for urban mobility system applications,” in Int. Conf. Unmanned Aircraft Syst. (ICUAS), Athens, Greece, IEEE, May 2021. doi: 10.1109/ICUAS51884.2021.9476854. [Google Scholar] [CrossRef]
74. S. J. C. Knox, V. J. Crann, P. Amiri, and W. J. Crowther, “A practical framework for multi agent experiments in aerial robotics,” in 7th Int. Conf. Mech. Eng. Robot. Res. (ICMERR), Krakow, Poland, IEEE, Dec. 2022. doi: 10.1109/ICMERR56497.2022.10097803. [Google Scholar] [CrossRef]
75. A. Yadav et al., “Hybridizing artificial intelligence algorithms for forecasting of sediment load with multi-objective optimization,” Water, vol. 15, no. 3, Jan. 2023, Art. no. 522. doi: 10.3390/w15030522. [Google Scholar] [CrossRef]
76. N. H. Umelo, N. K. Noordin, M. F. A. Rasid, T. K. Geok, and F. Hashim, “Grouping based radio frequency identification anti-collision protocols for dense internet of things application,” Int. J. Electr. Comput. Eng., vol. 12, no. 6, Dec. 2022, Art. no. 28446. doi: 10.11591/ijece.v12i6.pp5848-5860. [Google Scholar] [CrossRef]
77. M. Leszczuk, S. Szott, P. Trojovský, and M. Dehghani, “Pelican optimization algorithm: A novel nature-inspired algorithm for engineering applications,” Sensors, vol. 22, no. 3, Jan. 2022, Art. no. 855. doi: 10.3390/S22030855. [Google Scholar] [PubMed] [CrossRef]
78. N. R. Moparthi, G. Balakrishna, P. Chithaluru, M. Kolla, and M. Kumar, “An improved energy-efficient cloud-optimized load-balancing for IoT frameworks,” Heliyon, vol. 9, no. 11, Nov. 2023, Art. no. e21947. doi: 10.1016/j.heliyon.2023.e21947. [Google Scholar] [PubMed] [CrossRef]
79. S. H. Lee, C. H. Cheng, C. C. Lin, and Y. F. Huang, “PSO-based target localization and tracking in wireless sensor networks,” Electronics, vol. 12, no. 4, Feb. 2023, Art. no. 905. doi: 10.3390/electronics12040905. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools