
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

A Novel Proactive AI-Based Agents Framework for an IoE-Based Smart Things Monitoring System with Applications for Smart Vehicles
1 Department of Electronic Engineering, National Chin-Yi University of Technology, Taichung, 411030, Taiwan
2 School of Computing Science & Engineering, VIT Bhopal University, Bhopal, 466114, India
3 Department of Refrigeration, Air-Conditioning and Energy Engineering, National Chin-Yi University of Technology, Taichung, 411030, Taiwan
* Corresponding Authors: Meng-Hua Yen. Email: ; Nilamadhab Mishra. Email:
Computers, Materials & Continua 2025, 82(2), 1839-1855. https://doi.org/10.32604/cmc.2025.060903
Received 12 November 2024; Accepted 18 December 2024; Issue published 17 February 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The Internet of Everything (IoE) coupled with Proactive Artificial Intelligence (AI)-Based Learning Agents (PLAs) through a cloud processing system is an idea that connects all computing resources to the Internet, making it possible for these devices to communicate with one another. Technologies featured in the IoE include embedding, networking, and sensing devices. To achieve the intended results of the IoE and ease life for everyone involved, sensing devices and monitoring systems are linked together. The IoE is used in several contexts, including intelligent cars’ protection, navigation, security, and fuel efficiency. The Smart Things Monitoring System (STMS) framework, which has been proposed for early occurrence identification and theft prevention, is discussed in this article. The STMS uses technologies based on the IoE and PLAs to continuously and remotely observe, control, and monitor vehicles. The STMS is familiar with the platform used by the global positioning system; as a result, the STMS can maintain a real-time record of current vehicle positions. This information is utilized to locate the vehicle in an accident or theft. The findings of the STMS system are promising for precisely identifying crashes, evaluating incident severity, and locating vehicles after collisions have occurred. Moreover, we formulate an ad hoc STMS network communication scenario to evaluate the efficacy of data communication by utilizing various network parameters, such as round-trip time (RTT), data packet transmission, data packet reception, and loss. From our experimentation, we obtained an improved communication efficiency for STMS across multiple PLAs compared to the standard greedy routing and traditional AODV approaches. Our framework facilitates adaptable solutions with communication competence by deploying Proactive PLAs in a cloud-connected smart vehicular environment.Keywords
An IoE-centered proactive AI-based learning agent (PLA) promotes an open and decentralized network of everything and communicates with other devices using specific protocols. The conventional cornerstone of agent interaction is the concept of message-passing acts. Tools developed through distributed software and application engineering programs can manage agents’ adaptability, autonomy, responsiveness, time constraints, and interconnections. Furthermore, the full potential of well-formed agent theories must be included in software artifacts developed using software engineering approaches to the greatest feasible extent. PLAs and the intelligent agent concept are two of the most effective methods for dealing with mobile sensing networks’ varied, dynamic, and heterogeneous nature. The distributed context of the networks and the intrinsic properties of each agent, such as responsiveness, social capacities, and proactivity, are suited for directing the dynamics and scaling of massive urban environments. This is because each agent possesses these intrinsic properties. PLAs also benefit the construction of mobile monitoring devices due to the human-specific features of PLAs, such as reason and connection with surroundings and other entities. In addition, the decentralized nature of the networks allows a dynamic system to be developed that can modify its structure to accommodate the ongoing changes produced by large metropolitan areas [1,2].
Multiagent networks may be used to divide software into numerous distinct entities that are then implanted into an environment to meet the operational and quality standards of the system. PLAs are a strategy for addressing an issue within this divided software. A PLA is a specific breakdown of the components of a network that interact with one another; it is meant to fulfill the system’s requirements. A PLA software framework comprises various elements, including agents, assets, services, and the atmosphere. The interactions between the components are complex and varied, ranging from indirect participation through virtual pheromones to intricate bargaining methods. PLAs, or model-based approaches, are essentially an enormous family of design methodologies with different properties and can be implemented in various challenging domains. After analyzing the problem to determine the system’s quality and functional attribute needs, the system architect might not necessarily choose a result based on the PLA. Some quality characteristics, including openness, adaptability, and robustness, may impact whether a PLA software architecture is utilized [3].
In recent years, the popularity of the phrase “Internet of Everything” (IoE) has risen. This phrase is used to characterize the interconnected gadgets that are involved in the creation of smart environments. IoE environments must contend with several key challenges. One of the most critical challenges is managing the quantity of data that IoE devices acquire but, in many instances, do nothing with. Typically, the data are transmitted to centralized servers hosted in the cloud, where they are processed to extract information from them or trigger particular activities. To address this, ideas such as Computing on the Edge and Fog have been developed [4]. These concepts try to alter the inert behavior of the IoE nodes and transform them into active members of the system. When these nodes are outfitted with mechanisms for data analysis, information can be processed in a location that is geographically closer to where it was generated rather than being transmitted over long distances to data centers that are externally accessible. When considering projections of the growth in the number of internet-linked devices from which data are created over the next few years, adjusting data processing to the conditions of the local area is even more sensible. Research has projected that the number of linked devices will approach 50 billion, indicating that each citizen will have approximately seven connected devices emitting data. Additionally, the number of connected devices is anticipated to exceed 100 billion. This information must be locally processed on the devices to avoid network density issues, more significant storage costs, and unnecessary inefficiencies. The local process eliminates the requirement to upload all the information to the cloud, significantly reducing cost and accelerating processing time. Fundamental information analysis is a necessity that can be satisfied through faster data processing in several different industries, including manufacturing, banking, telecommunications, transportation, and health care. The IoE is a communication network comprising billions of complexes and linked items, including sensors, electronics, actuators, platform hubs, and gateways. These tangible gadgets can connect by utilizing wireless networks. In smart gadgets, data transmission and function performance are not dependent on human involvement. The IoE is also a collection of embedded capabilities connected to the internet, including sensing and actuation, computation, networking, and the capabilities of physical devices.
The innovative IoE can influence anything from ordinary decision-making to issues as important as health monitoring, improving endeavors and human life. The emergent significance of IoE technology in day-to-day life has changed people’s lifestyle options. Numerous IoE-based services demand data about nodes’ positions and locations to enable the nodes to communicate efficiently. Wireless sensor network (WSN) communication is an integral part of the IoE that may be used in various ways. WSNs are meant to be merged into the IoE, with sensor nodes connecting to the internet and automatically fulfilling their assigned tasks. Combining WSNs with socially aware networking (SAN) is often desirable. In addition, merging WSNs with the Internet of Vehicles (IoV) allows the natural environment to be critically examined, preventing potentially harmful events [5].
The IoE has opened new opportunities for carmakers and purchasers worldwide. The IoE in the automobile industry has become a hotspot for various multipurpose solutions at both the commercial and industrial levels. IoE applications have significantly impacted the worldwide automobile business, from linked automobiles to automated transportation systems [6]. Manufacturing businesses were the first to embrace the IoE, achieving autonomy and lower production costs. Later, the use of the IoE became more industrial and widespread. The IoE offers enormous opportunities for the automotive sector. Various automotive IoE scenarios have emerged, altering how people connect with automobiles. By providing wireless, standardized communication systems, the IoE has revolutionized intelligent vehicle engineering. If an innovative vehicle travels at a speed of more than 20 km/h, it is considered an intelligent transportation system. Since the bandwidths of GPRS (General Packet Radio Service) and GSM (Global System for Mobile Communication) are 64 to 128 kilobytes per second, a global positioning system (GPS) connection is not a viable option. Using a Wi-Fi communication method is a solid application technique. Wi-Fi’s characteristics, speed, and adaptability are critical in intelligent vehicle issues [7].
At the turn of the millennium, automobile manufacturers started implementing very complex systems and technologies to ensure the safety of their customers’ drivers. Vehicle reversing assist, ensuring the use of vehicle seatbelts, geo-tagging, and geo-location systems for routing and position sharing, virtual door unlocking and locking anti-theft devices, and activating airbags during an accident are a few of the many small elements that are already closely monitored and used in vehicles. Although vehicle warning systems have been around for over twenty years, they began to gain popularity in May 2012, when Google deployed driverless cars as part of its Google Maps effort. Companies such as Tesla swiftly followed suit, carrying out various experiments. There are still concerns about transporting personnel in these cars, but their use is becoming more widespread. Recent research centers on developing an intelligent system to protect vehicles from being stolen [8]. This protection can be achieved by allowing ignition only after confirming the driver’s biometric data and ensuring that the driver is not influenced by alcohol or drugs.
The proposed framework incorporating critical elements for developing an autonomous driving system is stated in Fig. 1. In autonomous driving, several characteristics, including the state of the environment and the engine, the amount of fuel remaining in the tank, and the distances between objects in front of and behind the vehicle, are continuously monitored by sensors installed in the car. A tablet installed in the vehicle displays all this information to the driver. Wi-Fi and Bluetooth are wireless networking technologies that enable wireless communication between the sensor and the tablet.
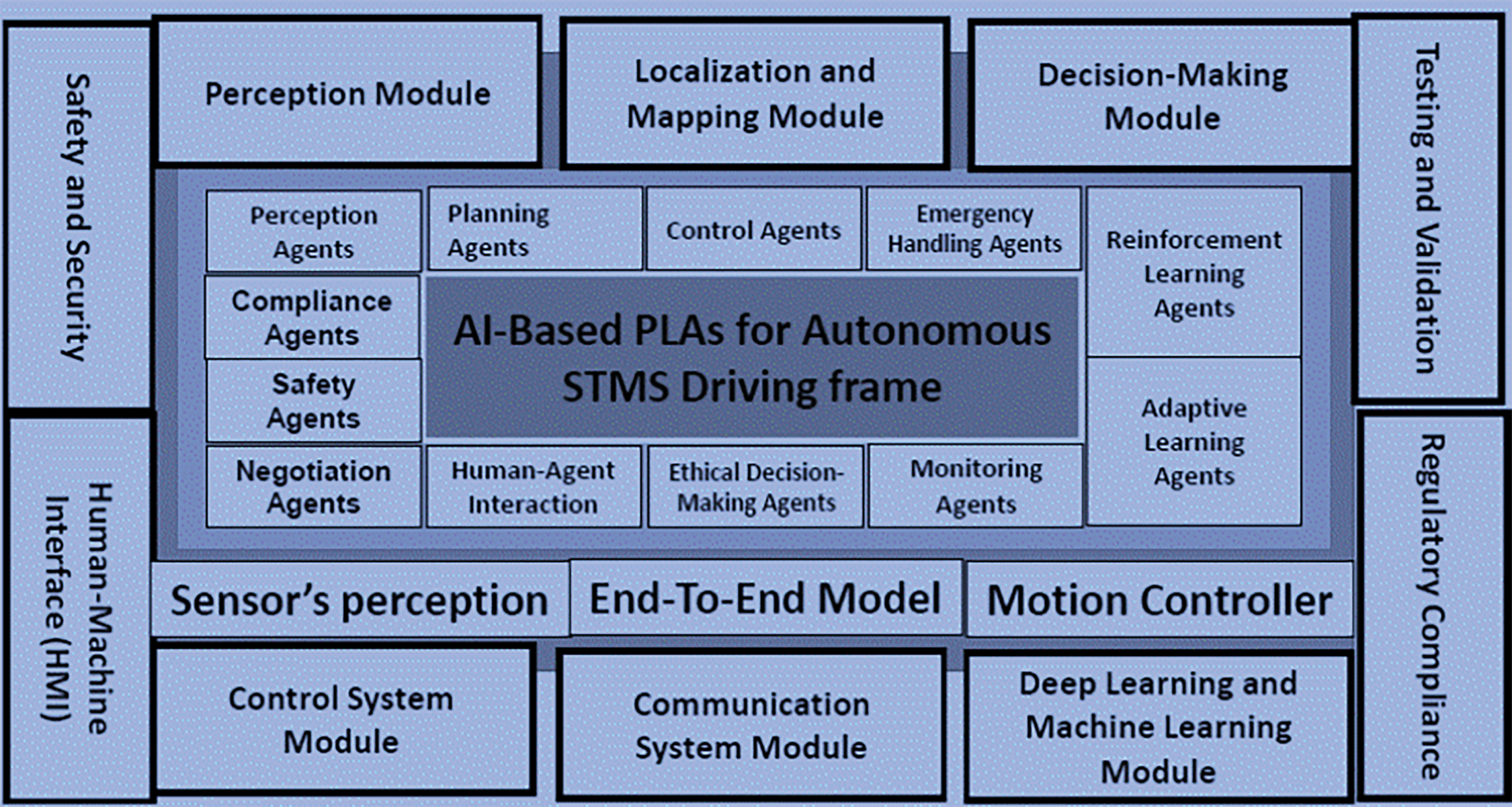
Figure 1: AI-Based PLAs for autonomous STMS driving frame
To enable a car to travel and function autonomously, various technologies must be integrated into an AI-based framework for autonomous driving. Real-time decision-making, reinforcement learning, and a thorough grasp of multi-agent systems are necessary for creating such a framework. Individual agents and their interactions must undergo regular upgrades and changes to create a stable and dependable autonomous driving system.
We introduced the IoE-centered proactive AI-based learning agent (PLA) and its prospective operations. Later, we described the “Internet of Everything” (IoE) background analysis, followed by Artificial intelligence operations to automate those. Finally, we integrated those for our proposed AI-based PLAs for the Autonomous STMS framework. Based on our significant research efforts, we have outlined the main points.
Major Highlights of This Work:
1. The Smart Things Monitoring (STMS) System is proposed for the early identification and prevention of smart vehicle theft. The STMS incorporates a Raspberry Pi, several sensors, a GPS module, a GSM/GPRS module, and other components.
2. The Raspberry Pi (ARM11) is used to obtain system control, and the accelerometer is used to find events in this system. If an incident occurs, authorized employees are notified. This allows the employees to respond quickly and effectively, saving lives and minimizing damage.
3. The algorithm of the proposed STMS framework enables multipurpose learning solutions to be applied by deploying specialist learning agents.
4. A traditional strategy based on detectors and a cloud processing system is compared to a novel technique based on embedded intelligent agents. An information-gathering platform for intelligent vehicles is built to conduct this analysis.
The first part (Section 1) of this paper introduced this work. All of the groundwork was laid, including major development modules such as the aims and objectives of the created system and the justification of this work title. Section 2 of this report details the completed literature review to prepare for the current work. The methodology and methods utilized in this investigation were researched, recorded, and contrasted to comparable or contrasting methods and processes. Afterward, these operations were reviewed twice to ensure that their systems did not contain any potential dichotomies, and other tactics were integrated to fill in gaps. Next, the technical aspects of the work are discussed. The fundamental structure and architecture of the methods implemented in creating intelligent automotive safety and protection systems are discussed in Section 3. The experimental analysis and findings are discussed in Section 4, and the conclusion is given in Section 5.
Even though the first fully autonomous cars did not hit the roads until 2010, driver assistance and safety technology have existed since the turn of the millennium. In addition to initial obstruction detection systems, which utilized ultrasonic, lidar, and SONAR, various types of cameras were introduced that achieved the same objective through image processing and computer vision. In this section, some recent advancements in this field are discussed. The authors of the work [9] provide a deep learning system for displaying real-time guidance maps that react to road diversions and environmental situations. The system is based on the concept of vehicle ad hoc networks (VANETs), which the same researchers developed. Driver fatigue is approached head-on by the authors of [10], who combine several picture processing techniques with camera technology. The authors of [11] present a smart method that prioritizes traffic flow and driver safety while exploiting “vehicle-to-infrastructure” communications to identify road obstacles and challenges. Advanced driver assistance systems (ADASs) are discussed in [12], which depicts a comparable concept. The authors of [13] propose a method for preventing automobile theft and ensuring the safety of automobiles. The registered driver is notified through text message or phone call if the car’s hood or door is ajar, which indicates that the car’s door has been unlocked using a spatial tag. In a significant collision, a message is delivered to occupants’ friends, families, authorities, and emergency services, such as ambulances. If the driver needs to send an emergency signal to his friends or family, he can do so with the tap of a finger or the click of a mouse on the electronic device he is carrying. Planning and developing a web-based weather monitoring and management system is the primary objective of the research presented in [14]. A research work [15] proposes a real-time privacy criterion that controls the speed at which a vehicle can go when the driver feels fatigued. A methodology for building an intelligent automotive system utilizing an Internet of Things (IoT) system is suggested in the works [16,17]. The concept of an intelligent automobile system illustrates how a car might travel from point A to point B using the shortest possible path by recognizing and avoiding obstacles along the route.
This study explains an advanced driving monitoring assistance system (MAS) that monitors driver’s minds to keep them safe while behind the wheel. The driver’s emotions are determined by analyzing the driver’s facial expressions; as a direct result, the driver’s behavior behind the wheel is continuously monitored. This technology immediately informs the driver if the driver displays unsafe driving behaviors. The work in [18] uses a Raspberry Pi as a management chip to create a relevant perspective, self-contained auto model [19], which will be the primary emphasis of this study. An HD (high-definition) camera and an ultrasonic sensor supply the vehicle with fundamental information regarding the surrounding environment. The automobile is built to perform the task at hand in an accurate and risk-free manner, eliminating the possibility of error caused by human intervention. Several active computations, such as path identification and obstruction location, are integrated to provide autocritical control. Because of the ethical character of the processor, research concentrates on using a Raspberry Pi as a potential medium for the system’s implementation. Researchers [20] propose the creation and design of an accelerometer-based strategy for driver safety. In this particular system, the Raspberry Pi (ARM11) is used to obtain control, and the accelerometer is used to locate events. In the event of an incident, authorized workers will receive a notification, which will enable them to respond in a timely and efficient manner and thereby help to save lives and reduce property damage. The proposed model is inefficient and inadequate because it consists of only one module and ignores other factors contributing to catastrophic events. The authors of [21] propose a convincing collision arrangement method for a vehicle to recognize the obstacles in its front and blind zones. Moreover, the work [22] presents a dependable system for preventing automobile accidents, incorporating an alcohol-detecting component. This device can alert the driver of the amount of alcohol consumed while also displaying the information on an LCD (Liquid Crystal Display) screen for the driver. It also uses a buzzer to notify individuals in the surrounding area and the vehicle’s driver, of the driver’s position [23].
Developing, administering, and integrating IoE systems in real-world scenarios, such as smart buildings or intelligent industries, is difficult for all parties participating in their current production and use, including in intelligent buildings and innovative sectors. Because of this, models, procedures, technologies, and points of view must be devised and put into practice to assist developers in handling these new difficulties. Various approaches, instruments, and software procedures have been developed in response. According to authors [24], classifying strategies by different design techniques is feasible. This produces a range of categories, such as agent-based structures, service-based structures, and event-based structures. The research discusses the latter structures and is based on software agents. The current state-of-the-art platforms for supplying information to computing-restricted gadgets in the existing IoE have been investigated. The methodology recommended by the previous works uses mobile agents on various hardware devices [25,26].
The primary focus of this work is on collaborating with hardware components that are capable of running TinyOS. This fully accessible operating system was developed specifically for wireless sensor networks. Because this operating system was exclusively designed for a select hardware group, it is only compatible with a small subset of available hardware. The authors of [27] believe that using mobile agents to convey knowledge to the hardware nodes will be helpful. The creators of the program state that it can run on Java MV or TinyOS. It can also be displayed on Sun SPOT (Systeme Probatoire d’Observation de la Terre) devices. These devices are compatible with programming languages such as Java but are costly, so they are no longer produced. Groundbreaking work on cognitive design and logic is quickly becoming essential to MAS research. The operational programming language, Agent Speak (L), has been updated with a new article that formally establishes cognitive qualities. Deriving meaning from the information obtained from the sensors’ readings is essential in constructing a mobile sensor unit. The framework must determine the user’s current context and use that knowledge to build behavior patterns or extract crucial information for subsequent decision-making. Approaches from the machine learning (ML) and data mining fields, particularly the ensemble learning field, are frequently utilized in the research regarding this objective. Because of their high-performance levels, these approaches integrate decision trees, also known as DTs, frequently utilized in object and user movement detection. The Jigsaw software obtains data from the smartphone accelerometer and analyzes it using DTs to determine the user’s behavior in this line. In recent years, there has been a lot of interest in applying deep learning techniques similar to those used in human activity recognition (HAR). For instance, Deep Sense [28] combines recurrent and convolutional neural networks for implementations. In these implementations, deep Sense outperforms state-of-the-art networks in their respective categories: automobile tracking using sensors to capture motion, diverse human activity detection, and user identification using biometric motion analytics [29,30]. Furthermore, GMMs (Gaussian mixture model) have been widely applied in audio and speech recognition systems. For instance, Stress Sense extracts pressure from human voice samples recorded by the phone’s microphone and employs GMMs with a diagonal covariance matrix. This allows Stress Sense to recognize pressure from human speech samples. The memory assistance software uses GMMs to automate speaker detection. In this section, a variety of other classification strategies are examined [31]. The work [32] demonstrates a device that can extract fuel prices from digital camera photographs of roadside billboards and then classify such photos using artificial neural networks.
By incorporating software agents on computationally constrained wireless hardware, this research attempts to address the issues that arise while developing dynamic IoE environments. Smart Intelligent objects (SOs) and smart environments (SEs) are fundamental concepts for modeling IoE contexts. The central pieces of IoE environments are known as SOs. These commonplace products have been modified to include hardware components, such as central processing units (CPUs), communications networks, and actuators or sensors, to control, measure, and respond to surroundings. In contrast, SEs are cyberphysical environments in which many multimodal devices are utilized to collect data from the surrounding environment and communicate with the people in the environment. Hardware components play a significant role in SEs. These components are typically small and lightweight, so they may be incorporated into a range of ‘things’. These components are also the foundation of the cyber-physical networks engaged in the Internet of Things (IoT). Consequently, the roles of cognitively constrained devices or devices with restricted resources must be clarified. The devices are generally limited in size, data storage, energy sources, calculation capacity, and communication quality. Consequently, the tasks that these devices perform are typically very well-tuned. An illustration of an IoE device’s significant components, whether hardware or software, is depicted in Fig. 2. With the current state of technology, accurately predicting all accidents is impossible. However, we should at least be able to spot errors as quickly as possible. When a collision occurs, it is imperative that any victims, whether they are humans or animals, receive prompt medical assistance. People who have been injured in accidents commonly delay seeking medical help, either because they underestimate the severity of their wounds or because they are concerned about the legal ramifications of seeking assistance. Any injuries should always be examined, even if a person seems to be in good health. The STMS described in this research primarily serves to locate accidents as quickly as possible, determine the driver’s condition in an accident, and notify the appropriate authorities. The Major Vulnerability and Safety Management System (SVSM) was not a reliable system but a structure for rapidly identifying significant problems. If the customer’s vehicle is stolen, the proposed STMS allows them to turn it off remotely. Users will also be able to monitor the locations of their vehicles from any location worldwide. The STMS includes a Raspberry Pi and several sensors, a GPS module, and a GSM/GPRS module to accommodate these components. Figs. 3 and 4 illustrate the overarching design of the STMS platform as well as the interior layout of the IoE network. The IoE network can identify any tilt, spin, or change in velocity in any given direction. Automobiles have used Touch sensors for collision detection and airbag deployment for several years. The STMS uses these two detectors to identify any errors that may have occurred. The data from the accelerometer are constantly monitored, and the system determines that an accident has occurred if the rate of deceleration or acceleration is more significant than a predetermined threshold number or if the detector is tilted more than a predetermined amount.

Figure 2: IoE environment and analytics

Figure 3: STMS framework’s architectural overview

Figure 4: Block diagram of a vehicle equipped with the STMS framework
As previously stated, the ignition mode’s initial stage employs facial recognition to authenticate the user’s legitimacy. This is achieved using the mean square error (MSE) idea of template matching similarities. Seventy-four men and women, aged 21 to 42, with varying levels of complexion, eye, and hairstyle contrast, were instructed to stare into 5-megapixel USB cameras. Eq. (1) transforms the resulting color picture into a grayscale image.
Gr denotes a pixel with grayscale, while R, G, and B denote a pixel’s red, green, and blue intenseness, respectively.
The term “PLA-based intelligent software agents” refers to entities attempting to mimic human thinking processes or behaviors. This group includes agents targeted at assisting users, completing specific activities, conducting supervisory and security activities, or filtering data, among other objectives. It is possible to understand how the agent senses its surroundings using several sensors and then becomes involved with effectors.
Distinguishing between multiagent networks and agent-based networks is essential. Agent-based systems use the notion of agents as an abstract technique when designing a system, but they may be implemented using regular software architecture. A PLA-based multiagent network, on the other hand, is created to explicitly include multiple agents that communicate with one another to accomplish a particular objective. When an issue requires more than one agent to solve, numerous agents can be combined into a multiagent system (MAS), which offers a structure for agents to interact and collaborate to solve issues. A MAS is a system in which each agent has insufficient data or abilities to solve problems, has no universal control over devolved data, and executes tasks non-synchronously. Inside a MAS, every agent has distinct goals and expertise; thus, cooperation between agents is essential for integrating their contributions and resolving issues. Because the malfunction of a solitary agent does not jeopardize the function of the whole system, MASs are regarded as durable systems. Agents in MASs may learn and plan activities cooperatively.
Algorithm of the Proposed STMS Framework:
Step1. Capture the image of the face and calculate the mean square error (MSE) of the image.
Step2. Calculate the reference image’s mean square error (MSE) and compare it with the previous result.
Step3. When the minimum threshold value is less than the threshold, display the result; otherwise, display invalid and turn off the vehicle engine.
Step4. Capture the fingerprint image from the sensor and compare it with the predefined entries. If the fingerprint matches, display the result; otherwise, display invalid and turn off the vehicle engine.
Step5. Capture the value from the alcohol sensor. If the value is less than the minimum, start the engine with a notification; otherwise, display invalid and turn off the vehicle’s engine.
Step6. Send a warning notification to the driver’s emergency contact number if an accident occurs.
Numerous data about the automobile, such as the engine’s fuel level and the distance between the vehicle and cars behind and in front of the vehicle, are displayed on the Head-up display during the monitoring phase. The warmth of the surroundings is also captured and displayed. Furthermore, crash detectors are placed on both sides of the automobile to detect crashes. In the terrible case of a collision, a notification is sent to a predetermined number via a GSM module. An Arduino Mega microcontroller board interconnects the sensors necessary for the above functions. The microcontroller’s data are then relayed over Bluetooth to a Raspberry Pi, displayed on a Head-up display linked through a local area network (LAN). Fig. 5 depicts the operational flow of our suggested STMS framework. This flow can be studied to understand the overall functional and operational features of the STMS framework.

Figure 5: Operational flow of the proposed STMS framework
Android software is essential for the program’s output, the Smart Vehicle Safety and Security System. This program utilizes various hardware components. In this work, an Arduino Uno is employed as the microcontroller. This particular microcontroller circuit is connected to all the sensing parts, and the microcontroller is the component that intakes the data and determines an appropriate output. A vibration sensor is utilized to identify instances of vehicular collisions. The signal from the sensor is transferred to the microcontroller circuit, which then processes the signal and generates the desired output. An alcohol or gas detector determines whether alcohol is present in the recorded breath. The information provided by the sensor is received by the microcontroller circuit, which then processes it and generates the desired output. An eye-blink detector is used to assess the driver’s exhaustion level. The input from the detector is transmitted to the microcontroller board, which then processes the information and generates the desired output. A buzzer indicates and sounds an alarm for the driver and the surrounding region. The signal is transmitted to the buzzer by the no-board, which is dependent on the calculations.
The GPS module records the coordinates of the location where the work is being carried out. The input from the module is transmitted to the microcontroller board, which then processes the information and generates the desired output. The GSM module is utilized to transfer the position coordinates that were collected by the GPS module. The module’s output is transmitted to the eye-blink detector and the circuit breaker. The circuit board has a microcontroller, which processes the input to generate a specific output. This paper explains connecting a GSM modem to a Toradex module. Numerous micro-switches are placed throughout the vehicle’s body for collision detection. If any of the switches light up, there has been an incident. In this circumstance, a message is dispatched to the local authorities. A notification is also delivered to the driver’s predefined emergency number. These messages are transmitted using a GSM module connected to the Arduino board via a sequential communication gateway.
A traditional strategy based on detectors and a cloud processing system is compared to a novel technique based on embedded intelligent agents. An information-gathering platform for intelligent vehicles is built to conduct this analysis. This platform has over 5000 active worldwide users who regularly contribute information on their intelligent vehicle routes. The information on routes received by people who have tried the proposed technique can be feasibly analyzed alongside the data acquired using the traditional methodology. In the conventional system, information is analyzed in its entirety and as a continual transmission of data input/output inside the cloud system. However, in the proposed model, data processing is dispersed among the many IoE devices installed. Similarly, communicating with the agent infrastructure entails more flexible and manageable information transmission than traditional cloud systems, as depicted in Fig. 6. Raspberry Pi can connect to the cloud. With built-in networking capabilities (Ethernet or Wi-Fi), a Raspberry Pi can interface with various cloud services to send and receive data. Cloud processing plays a significant role in enhancing the capabilities of a Raspberry Pi by extending its functionality beyond local computation. The Raspberry Pi, a compact and relatively low-powered device, benefits from cloud integration for processing tasks requiring greater computational power, scalability, or accessibility.
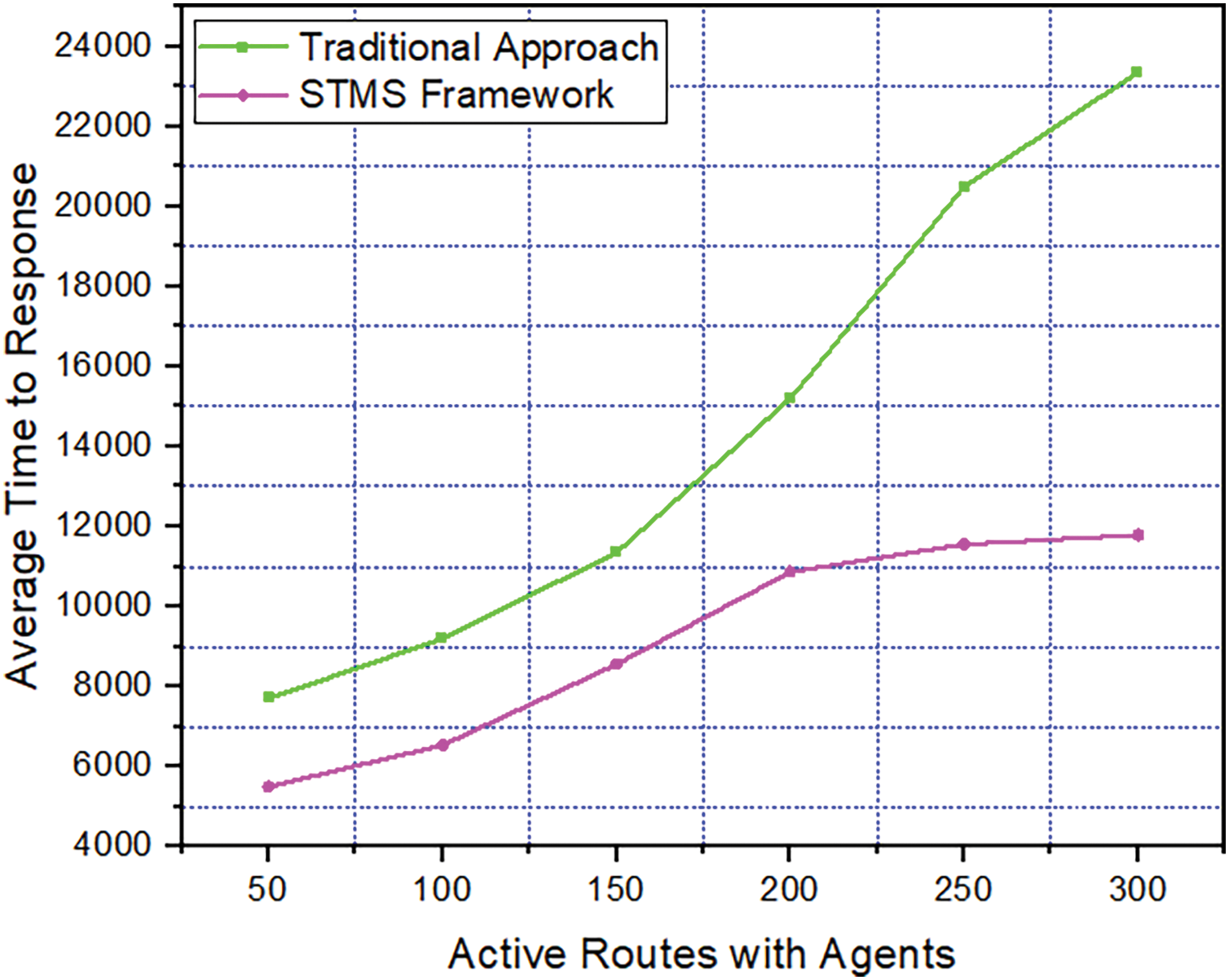
Figure 6: Average response time of the traditional vs. STMS framework
The Raspberry Pi with Accelerometer and Impact Detector is used to create the IoE gadget. GSM/GPRS and GPS modules are attached to the RPi, and a camera is mounted directly on the board. The Raspbian operating system, which includes a Python interpreter, is installed on the RPi. The Python programming language is used to access and control the equipment connected to the Raspberry Pi. The STMS system is installed and tested in a tiny automobile. The error value example is acquired to contrast an authorized or unauthorized photo and a reference picture to determine the efficiency of the face detection algorithm using MSE.
A match occurs if the MSE is below 3500; if the MSE is more than 5000, no match occurs. However, this method’s total reliability was determined to be 92.7%. This approach could not provide the intended results when the user’s face was only partially lighted. In addition, the fingerprint detector had a 96.97% accuracy rate when no tiny sensor particles were present when the detector was used. GPS and GSM are used to construct a capable Smart Vehicle Safety and Security System that includes a pressure detector, eye-blink detector, alcohol detector, proximity detector, and vibration detector.
In this study, we formulate an ad hoc STMS network scenario using the traditional ad hoc on-demand distance vector (AODV) routing protocol. We aim to evaluate the efficacy of data communication by utilizing various network parameters, such as round-trip time (RTT), data packet transmission, data packet reception, and loss. N mobile agent pieces are involved in this situation, where the value of N can range anywhere from 10 to 100. We account for the distance, denoted by “K,” between mobile agent elements in a structural grid, where the values of “K” can range from 30 to 100. The simulation times are set to one hundred seconds. One data packet is assumed to be sent across the network every second. The detailed analysis can be found in Fig. 7, and this analysis can be used for prospective studies.
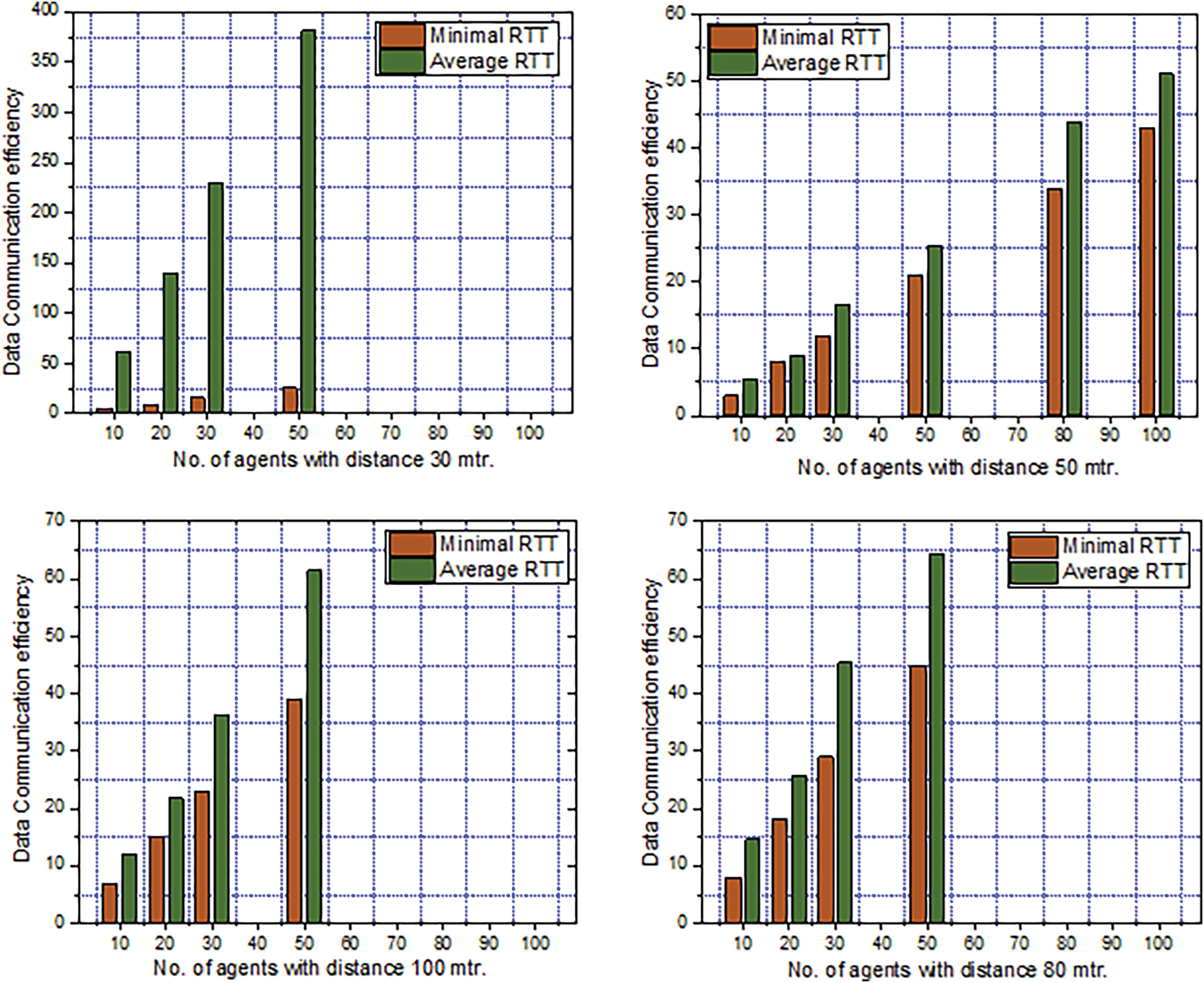
Figure 7: Data communication efficiency analysis for STMS across multiple PLA agents
Our research indicates that the average RTT increases as the packet loss rate increases when more mobile agents operate within a structural grid. In situations involving ad hoc networks, the time required for a packet to go from being sent to being received can be efficiently measured, so RTT is essential in these situations. To address the mobile agent’s changes in the structural grid, the packet loss rate can be successfully minimized when the distance between agents is fifty meters. While simulating mobile ad hoc agent scenarios for potential STMS frame communication through message passing, we used node containers, net device containers, and IPV4 interface containers.
In addition, to demonstrate the validity of the data communication effectiveness of the proposed STMS framework, we compare this framework to the greedy technique by considering the following three factors: data size, bandwidth of the relay link, and bandwidth of the direct link, as shown in Figs. 8–10. Greedy algorithms gradually build a solution piece by piece, constantly picking the component that delivers the most evident and immediate benefit to the overall solution. Therefore, greedy methods are best suited for issues in which selecting a locally optimal solution leads to a globally optimal solution. Greedy methods frequently lead to unfairness among users. However, the system’s overall performance will not suffer due to the unfairness created by methods in this work because the problem is modeled using the standard approach. Demonstrating this from the perspective of the optimal transmission time and response time of the proposed STMS framework is possible.
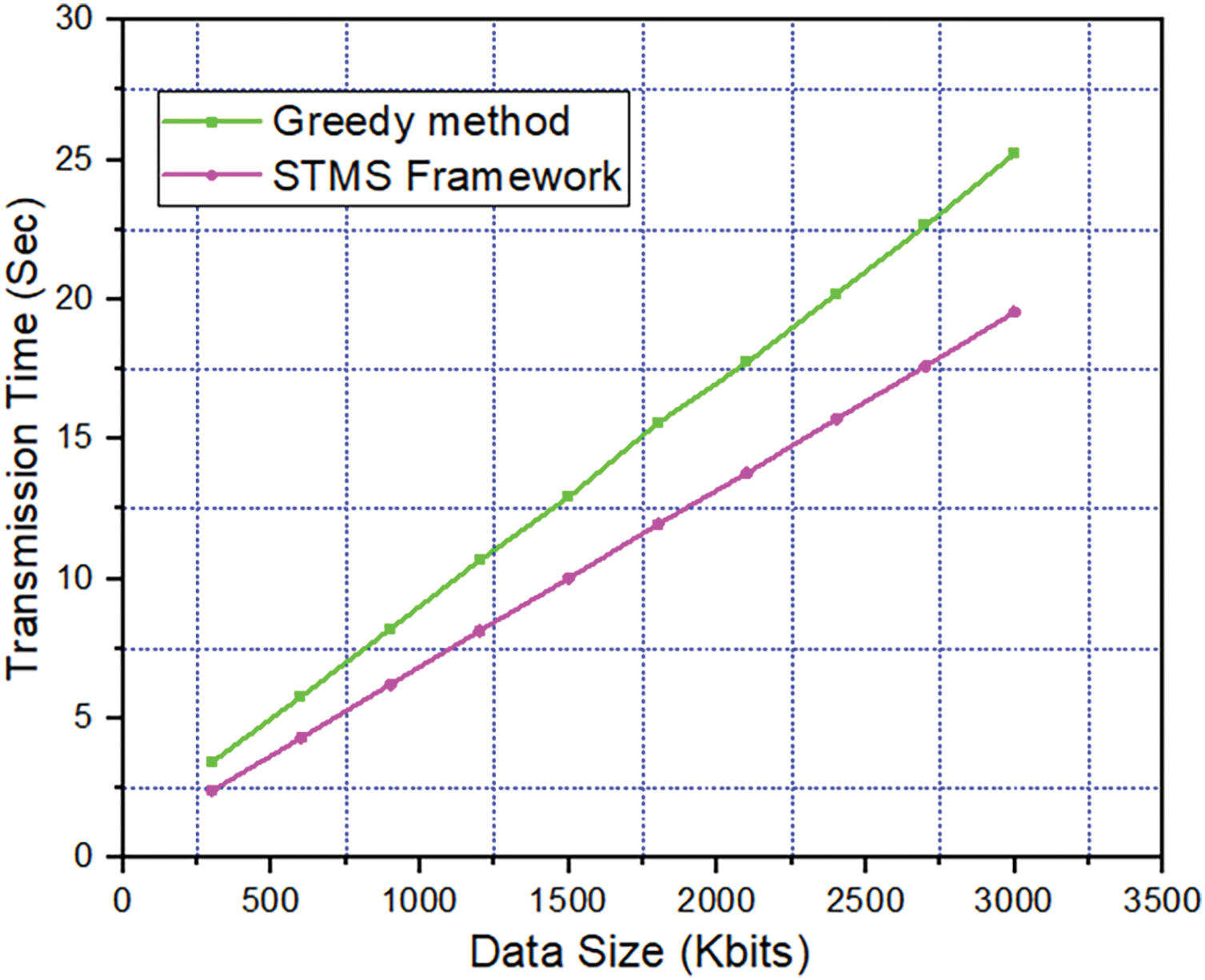
Figure 8: Data communication efficiency analysis across multiple PLAs considering data size as a factor
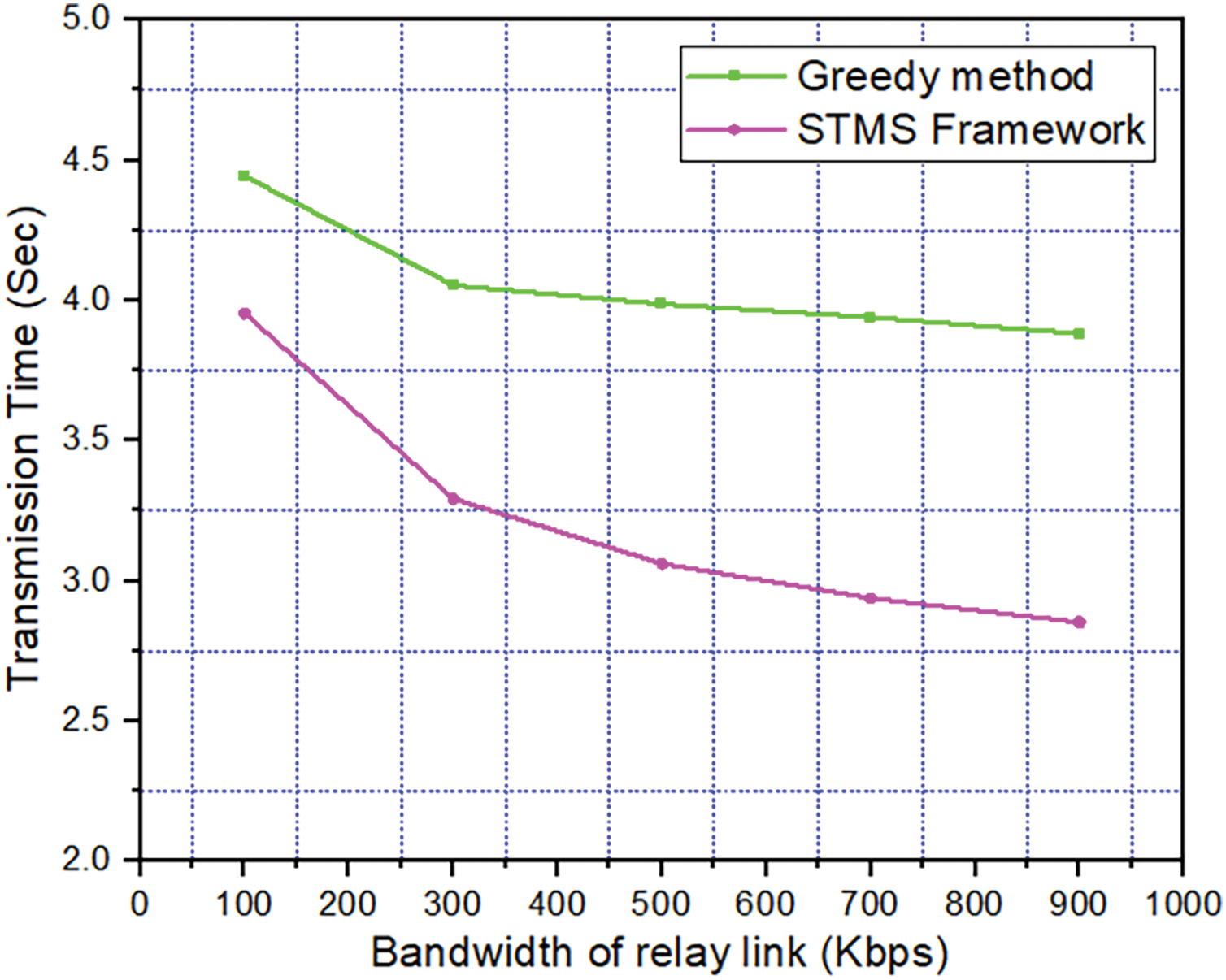
Figure 9: Data communication efficiency analysis across multiple PLAs considering the bandwidth of the relay link as a factor

Figure 10: Data communication efficiency analysis across multiple PLAs considering the bandwidth of the direct link as a factor
This technology is part of a multi-agent framework responsible for handling the many wireless technologies composing the IoE environment in which the framework will be used. The Two basic categories of implementable wireless gadgets have been recognized: wireless equipment capable of sharing data with the Internet and systems that make gateways operate as bridges between the network and the Internet. Through deploying the MAS, the proposed architecture aims to reduce and address these open problems. Accidents and their corresponding severity levels are recognized instantly and reported to officials without prejudice utilizing the STMS. Immediate medical care will help to limit fatalities and severe injuries in car accidents. This framework may also assist traffic officials in diverting traffic and conserving energy and resources. The frequency of car thefts will progressively decrease since this framework will assist users with locating and controlling stolen automobiles. Because of the minimal cost and reduced complexity of the construction of and components utilized in the proposed system, even low-end vehicles may be equipped with this system, ensuring the safety and comfort of drivers in any vehicle worldwide. As a result, the incident notification text may not be delivered to the selected phone number. In future studies, the proposed and constructed method may be improved and adjusted by incorporating technological ideas such as GPS and big data to analyze and interpret accident-related patterns. The same technique could be changed and implemented for two vehicles simultaneously. Furthermore, the geological position of the accident could be communicated to an ambulance to ensure immediate medical care.
Designing a proactive AI-based agent framework for IoE-based smart things monitoring systems with applications for smart vehicles involves creating an intelligent system that anticipates and responds to environmental changes. This STMS framework employs AI agents to monitor and manage smart devices, focusing on vehicle applications. Developing a proactive AI-based agent framework for IoE-based smart things monitoring, especially for smart vehicles, demands a holistic approach, considering the dynamic nature of the environment and the need for real-time decision-making. Continuous updates, machine learning model retraining, and integration with emerging technologies are essential for the sustained success of the framework.
We investigated some imitations of the proposed STMS framework in the context of the Arduino board connected to the detectors. Places with outreach issues, poor network connectivity, and isolated areas with no network connectivity might be problematic for this system.
Future research will focus on improving real-time decision-making skills and context-aware proactivity. Achieving comprehensive situational awareness may include creating sophisticated models incorporating multi-modal data streams from various IoE devices, including environmental sensors, user behavioral patterns, and vehicle telemetry.
Future Research Recommendations
✓ Improving the capacity for proactive, context-aware decision-making in real-time is an area that will be the focus of future studies. Building complex models that incorporate multi-modal data streams from various Internet of Everything (IoE) devices, such as environmental sensors, user behavioral patterns, and vehicle telemetry, might be necessary to provide full situational awareness.
✓ In our simulated scenarios, we considered AI-based smart security features for anti-theft applications, enhancing the credibility and practical applicability of the findings. We estimated the framework reliability to be 92.7% through MSE. Moreover, the detailed reliability measures will be included in our future extended work.
✓ Future research will expand this to create a full prototype by addressing difficult road conditions and identifying anomalies in multi-object detection. Subsequent studies will concentrate on enhancing real-time decision-making capabilities and contextually aware proactivity.
✓ Develop AI-driven reinforcement learning models capable of dynamically adjusting to new patterns by acquiring optimum decision-making methods via trial and error in simulated settings. Future studies will build upon employing these tactics. The system can transcend the static characteristics of conventional models and develop into a resilient, dynamic instrument adept at adapting to fluctuating road conditions and evolving traffic patterns.
Acknowledgement: We thank the Vellore Institute of Technology in Bhopal, India, and the National Chin-Yi University of Technology, Taiwan. Moreover, we thank our research support team, anonymous reviewers, and editors for their constructive comments and suggestions.
Funding Statement: This research is funded by the Ministry of Science and Technology, Taiwan, grant number (MOST 111-2221-E167-025-MY2).
Author Contributions: Meng-Hua Yen and Win-Jet Luo designed the models and conducted a literature review, model testing, conceptualization, methodology, field study, fact curation, writing-original draft preparation, and result validation. Nilamadhab Mishra carried out model testing, investigation, writing, editing, writing draft preparation, field study, and result validation. Chu-En Lin carried out model testing, investigation, writing, editing, writing draft preparation, field study, and result validation. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Due to the nature of this research, participants of this study did not agree for their data to be shared publicly, so supporting data is unavailable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Atakishiyev S, Salameh M, Yao H, Goebel R. Explainable artificial intelligence for autonomous driving: a comprehensive overview and field guide for future research directions. 2021. doi:10.48550/arXiv.2112.11561. [Google Scholar] [CrossRef]
2. Grigorescu S, Cocias T, Trasnea B, Margheri A, Lombardi F, Aniello L. Cloud2edge elastic AI framework for prototyping and deployment of AI inference engines in autonomous vehicles. Sensors. 2020;20(19):5450. doi:10.3390/s20195450. [Google Scholar] [PubMed] [CrossRef]
3. Muhammad K, Ullah A, Lloret J, Del Ser J, de Albuquerque VHC. Deep learning for safe autonomous driving: current challenges and future directions. IEEE Trans Intell Transp Syst. 2020;22(7):4316–36. doi:10.1109/TITS.2020.3032227. [Google Scholar] [CrossRef]
4. Shi W, Cao J, Zhang Q, Li Y, Xu L. Edge computing: vision and challenges. IEEE Internet Things J. 2016;3(5):637–46. doi:10.1109/JIOT.2016.2579198. [Google Scholar] [CrossRef]
5. Garikapati D, Poovalingam S, Hau W, De Castro R, Shinde C. A comprehensive review of parallel autonomy systems within vehicles: applications, architectures, safety considerations and standards. IEEE Access. 2024;12(3):150395–418. doi:10.1109/ACCESS.2024.3430933. [Google Scholar] [CrossRef]
6. Abbasi S, Rahmani AM. Artificial intelligence and software modeling approaches in autonomous vehicles for safety management: a systematic review. Information. 2023;14(10):555. doi:10.3390/info14100555. [Google Scholar] [CrossRef]
7. Bathla G, Bhadane K, Singh RK, Kumar R, Aluvalu R, Krishnamurthi R, et al. Autonomous vehicles and intelligent automation: applications, challenges, and opportunities. Mob Inf Syst. 2022;2022(1):7632892. doi:10.1155/2022/7632892. [Google Scholar] [CrossRef]
8. Jabeen F, Rupanagudi SR, Bhat VG. IoT based smart vehicle ignition and monitoring system. In: 2019 International Conference on Advances in Computing, Communication and Control (ICAC3); 2019; Mumbai, India: IEEE. p. 1–7. doi:10.1109/ICAC347590.2019.9036809 [Google Scholar] [CrossRef]
9. Peng Z, Gao S, Li Z, Xiao B, Qian Y. Vehicle safety improvement through deep learning and mobile sensing. IEEE Netw. 2018;32(4):28–33. doi:10.1109/MNET.2018.1700389. [Google Scholar] [CrossRef]
10. Prashanth CR, Sagar T, Bhat N, Naveen D, Rupanagudi SR, Kumar RA. Obstacle detection & elimination of shadows for an image processing based automated vehicle. In: 2013 International Conference on Advances in Computing, Communications and Informatics (ICACCI); 2013; Mysore, India: IEEE. p. 367–72. doi:10.1109/ICACCI.2013.6637199 [Google Scholar] [CrossRef]
11. Kukkala VK, Tunnell J, Pasricha S, Bradley T. Advanced driver-assistance systems: a path toward autonomous vehicles. IEEE Consum Electron Mag. 2018;7(5):18–25. doi:10.1109/MCE.2018.2828440. [Google Scholar] [CrossRef]
12. Jiménez F, Naranjo JE, Anaya JJ, García F, Ponz A, Armingol JM. Advanced driver assistance system for road environments to improve safety and efficiency. Transp Res Procedia. 2016;14(8):2245–54. doi:10.1016/j.trpro.2016.05.240. [Google Scholar] [CrossRef]
13. Kulkarni SS, Harale AD, Thakur AV. Image processing for driver’s safety and vehicle control using raspberry Pi and webcam. In: 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI); 2017; Chennai, India: IEEE. p. 1288–91. doi:10.1109/ICPCSI.2017.8391917 [Google Scholar] [CrossRef]
14. Kinage V, Patil P. IoT based intelligent system for vehicle accident prevention and detection in real-time. In: 2019 Third International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC); 2019; Palladam, India: IEEE. p. 409–13. doi:10.1109/I-SMAC47947.2019.9032662 [Google Scholar] [CrossRef]
15. Ragesh NK, Rajesh R. Pedestrian detection in automotive safety: understanding state-of-the-art. IEEE Access. 2019;7:47864–90. doi:10.1109/ACCESS.2019.2909992. [Google Scholar] [CrossRef]
16. Shahadi HI, Haider HT, Muhsen DH. Vehicle monitoring based on GSM technology for safety and security. IOP Conf Series: Mat Sci Eng. 2018;433(1):012089. doi:10.1088/1757-899X/433/1/012089. [Google Scholar] [CrossRef]
17. Kumar A, Akhtar MAK, Pandey A, Srivastava RP. Smart city vehicle accident monitoring and detection system using (MEMS, GSM, GPS) Raspberry Pi 4. IETE J Res. 2023;69(11):8121–9. doi:10.1080/03772063.2022.2043787. [Google Scholar] [CrossRef]
18. Bhumkar SP, Deotare VV, Babar RV. Intelligent car system for accident prevention using ARM-7. Int J Emerg Technol Adv Eng. 2012;2(4):527–30. [Google Scholar]
19. Ambrož M. Raspberry Pi as a low-cost data acquisition system for human powered vehicles. Measurement. 2017;100(1):7–18. doi:10.1016/j.measurement.2016.12.037. [Google Scholar] [CrossRef]
20. Noy IY, Shinar D, Horrey WJ. Automated driving: safety blind spots. Saf Sci. 2018;102:68–78. doi:10.1016/j.ssci.2017.07.018. [Google Scholar] [CrossRef]
21. Wang Z, Zhan J, Duan C, Guan X, Lu P, Yang K. A review of vehicle detection techniques for intelligent vehicles. IEEE Trans Neural Netw Learn Syst. 2022;34(8):3811–31. doi:10.1109/TNNLS.2021.3128968. [Google Scholar] [PubMed] [CrossRef]
22. Izquierdo-Reyes J, Ramirez-Mendoza RA, Bustamante-Bello MR, Navarro-Tuch S, Avila-Vazquez R. Advanced driver monitoring for assistance system (ADMAS). Int J Interact Des Manuf. 2018;12(1):187–97. doi:10.1007/s12008-016-0349-9. [Google Scholar] [CrossRef]
23. Pannu GS, Ansari MD, Gupta P. Design and implementation of autonomous car using Raspberry Pi. Int J Comput Appl. 2015;113(9):22–9. doi:10.5120/19854-1789. [Google Scholar] [CrossRef]
24. Reddy VS, Padma Sree L, Naveen Kumar V. Design and development of accelerometer based System for driver safety. Int J Sci Eng Technol Res. 2014;3(12):3463–8. doi:10.17148/IJARCCE.2018.7322. [Google Scholar] [CrossRef]
25. Hahn C, Feld S, Schroter H. Predictive collision management for time and risk dependent path planning. In: Proceedings of the 28th International Conference on Advances in Geographic Information Systems; 2020; Seattle, WA, USA. p. 405–8. doi:10.1145/3397536.3422252 [Google Scholar] [CrossRef]
26. Thakur A, Mishra SK. An in-depth evaluation of deep learning-enabled adaptive approaches for detecting obstacles using sensor-fused data in autonomous vehicles. Eng Appl Artif Intell. 2024;133(8):108550. doi:10.1016/j.engappai.2024.108550. [Google Scholar] [CrossRef]
27. Shokri D, Larouche C, Homayouni S. Proposing an efficient deep learning algorithm based on segment anything model for detection and tracking of vehicles through uncalibrated urban traffic surveillance cameras. Electronics. 2024;13(14):2883. doi:10.3390/electronics13142883. [Google Scholar] [CrossRef]
28. Lou L, Song M, Chen X, Zhao X, Zhang S. Optimized wireless sensing and deep learning for enhanced human-vehicle recognition. IEEE Trans Intell Transp Syst. 2024;25(7):7508–21. doi:10.1109/TITS.2024.3352820. [Google Scholar] [CrossRef]
29. Tammvee M, Anbarjafari G. Human activity recognition-based path planning for autonomous vehicles. Signal Image Video Process. 2021;15(4):809–16. doi:10.1007/s11760-020-01800-6. [Google Scholar] [CrossRef]
30. Aiello F, Bellifemine FL, Fortino G, Galzarano S, Gravina R. An agent-based signal processing in-node environment for real-time human activity monitoring based on wireless body sensor networks. Eng Appl Artif Intell. 2011;24(7):1147–61. doi:10.1016/j.engappai.2011.06.007. [Google Scholar] [CrossRef]
31. Zepf S, Hernandez J, Schmitt A, Minker W, Picard RW. Driver emotion recognition for intelligent vehicles: a survey. ACM Comput Surv. 2020;53(3):1–30. doi:10.1145/3388790. [Google Scholar] [CrossRef]
32. Kang Q, Zhao H, Yang D, Ahmed HS, Ma J. Lightweight convolutional neural network for vehicle recognition in thermal infrared images. Infra Phy Technol. 2020;104:103120. doi:10.1016/j.infrared.2019.103120. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools