
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Employing a Diversity Control Approach to Optimize Self-Organizing Particle Swarm Optimization Algorithms
1 Department of Information Technology, Takming University of Science and Technology, Taipei City, 11451, Taiwan
2 Department of Electrical Engineering, National Chin-Yi University of Technology, Taichung City, 411030, Taiwan
* Corresponding Author: Wen-Tsai Sung. Email:
Computers, Materials & Continua 2025, 82(3), 3891-3905. https://doi.org/10.32604/cmc.2025.060056
Received 22 October 2024; Accepted 21 January 2025; Issue published 06 March 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
For optimization algorithms, the most important consideration is their global optimization performance. Our research is conducted with the hope that the algorithm can robustly find the optimal solution to the target problem at a lower computational cost or faster speed. For stochastic optimization algorithms based on population search methods, the search speed and solution quality are always contradictory. Suppose that the random range of the group search is larger; in that case, the probability of the algorithm converging to the global optimal solution is also greater, but the search speed will inevitably slow. The smaller the random range of the group search is, the faster the search speed will be, but the algorithm will easily fall into local optima. Therefore, our method is intended to utilize heuristic strategies to guide the search direction and extract as much effective information as possible from the search process to guide an optimized search. This method is not only conducive to global search, but also avoids excessive randomness, thereby improving search efficiency. To effectively avoid premature convergence problems, the diversity of the group must be monitored and regulated. In fact, in natural bird flocking systems, the distribution density and diversity of groups are often key factors affecting individual behavior. For example, flying birds can adjust their speed in time to avoid collisions based on the crowding level of the group, while foraging birds will judge the possibility of sharing food based on the density of the group and choose to speed up or escape. The aim of this work was to verify that the proposed optimization method is effective. We compared and analyzed the performances of five algorithms, namely, self-organized particle swarm optimization (PSO)-diversity controlled inertia weight (SOPSO-DCIW), self-organized PSO-diversity controlled acceleration coefficient (SOPSO-DCAC), standard PSO (SPSO), the PSO algorithm with a linear decreasing inertia weight (SPSO-LDIW), and the modified PSO algorithm with a time-varying acceleration constant (MPSO-TVAC).Keywords
Abbreviations
| PSO | Particle swarm optimization |
| SOPSO | Self-organized PSO |
| SOPSO-DCIW | Swarm optimization (PSO)-diversity controlled inertia weight |
| SOPSO-DCAC | Self-organized PSO-diversity controlled acceleration coefficient |
| SPSO | Standard PSO |
| SPSO-LDIW | Standard PSO-linear decreasing inertia weight |
| MPSO-TVAC | Modified PSO algorithm with a time-varying acceleration constant |
| DCIW | Diversity-Controlled Inertia Weight |
| DCAC | Diversity-Controlled Acceleration Coefficient |
The particle swarm algorithm simulates the emergence of wisdom manifested by simple biological groups, emphasizing collaboration, information interaction, and perception among simple individuals. Therefore, in the optimization algorithm model derived from this metaphor, the collaboration between simple individuals, the information dialog mode, and the effectiveness of the information perceived by the individuals directly affect the optimization performance of the algorithm. In the particle swarm algorithm, the best position experienced by the group is used as the only shared group information. This information is sensed by all the particles and guides them to fly quickly in the direction of this position. This unidirectional particle aggregation behavior directly leads to the rapid loss of population diversity. If the global optimal solution or suboptimal solution exists near the best position of the group, the algorithm may quickly converge to the global optimal solution or suboptimal solution. Otherwise, the algorithm is very likely to fall into a nonglobal optimal point and be difficult to escape. These phenomena are problems that make it difficult for the particle swarm algorithm to ensure global convergence [1,2].
The search dynamics of stochastic optimization algorithms based on group searches are difficult to predict. Suppose that the purpose of the search dynamics is to overcome the problem of premature convergence as much as possible. In that case, the system needs to be able to gain insight into and monitor the group dynamics during the search process. The system can also determine the time and scope of premature convergence of the group. Usually, the premature convergence of the PSO algorithm is caused by the premature loss of diversity in the group. Therefore, whether the optimal level of group diversity can be maintained under different search conditions fundamentally affects the global convergence of the algorithm. Fig. 1 is a typical PSO algorithm calculation and solution flow chart. Research scholar Zhenyu Zhang and others mentioned that the improved PSO algorithm is used to optimize the size of the tram battery supercapacitor energy storage system [3]. They proposed an innovative method, which is “An improved PSO algorithm with competition mechanism is developed for obtaining optimal energy storage elements”.
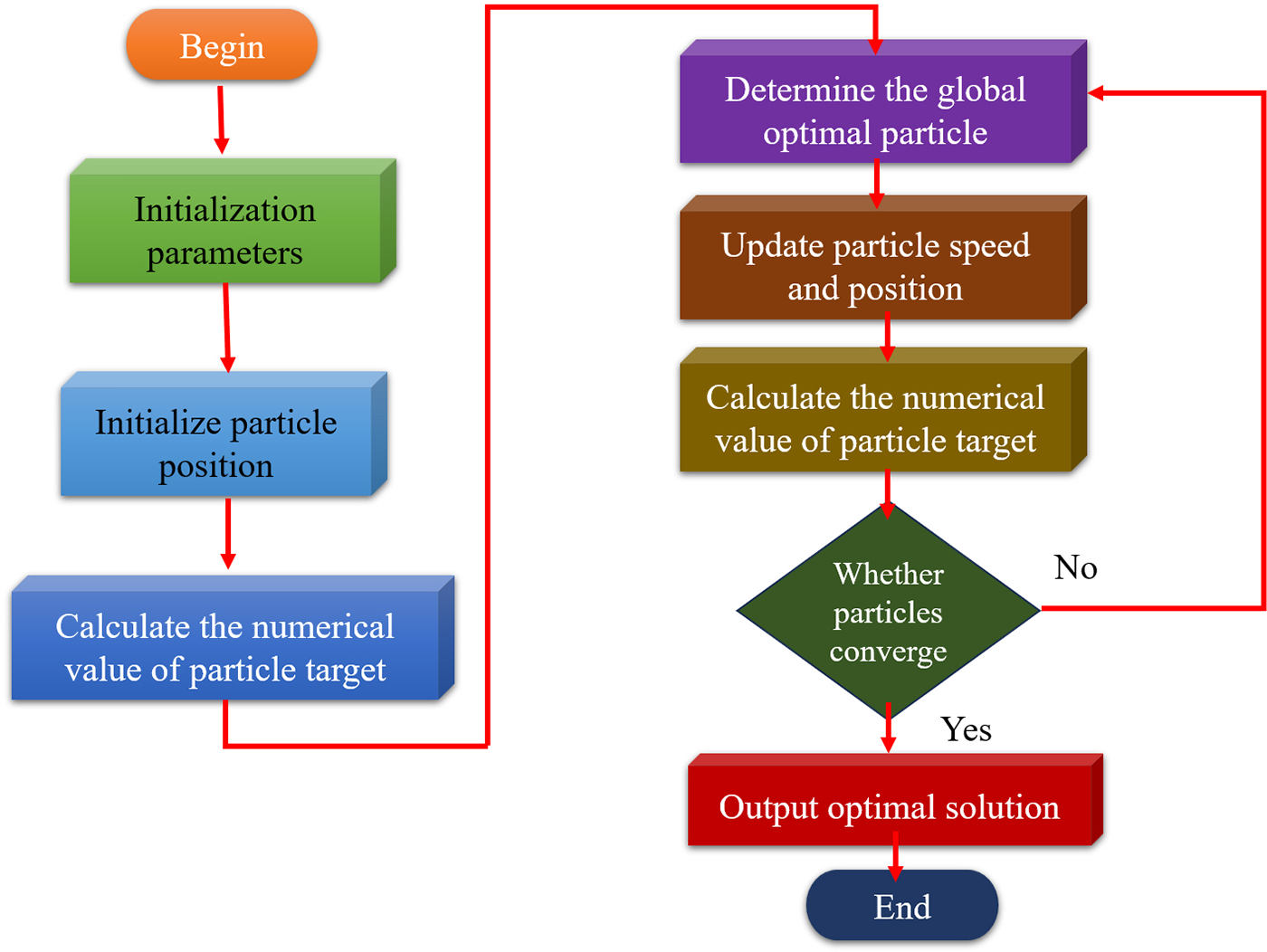
Figure 1: PSO calculation flow chart
In addition, researcher Zhenyu Zhang and others also mentioned that the competitive PSO algorithm is used to optimize the energy management strategy of the tram hybrid energy storage system [4]. These scholars proposed the contribution of “using an improved PSO algorithm based on a competition mechanism to obtain the optimal energy management strategy”. At the same time, they also constructed energy management strategy optimization models based on single threshold and multiple thresholds.
2 Self-Organizing Particle Swarm Algorithm
In the self-organized particle swarm algorithm self-organized PSO (SOPSO), the particle swarm behaves as a self-organizing system. Group diversity is a key factor affecting the behavior of individual particles and is an important group performance indicator. The interaction among individual particles and the group environment is simulated through the feedback mechanism existing in the self-organizing system. Moreover, this self-organizing system designs different control strategies. This strategy achieves the aggregation and dispersion of individuals and dynamically adjusts the balance between the global detection and local mining functions of the group. These conditions enable the group to maintain appropriate diversity and then converge globally with a greater probability [5,6].
In the above model,
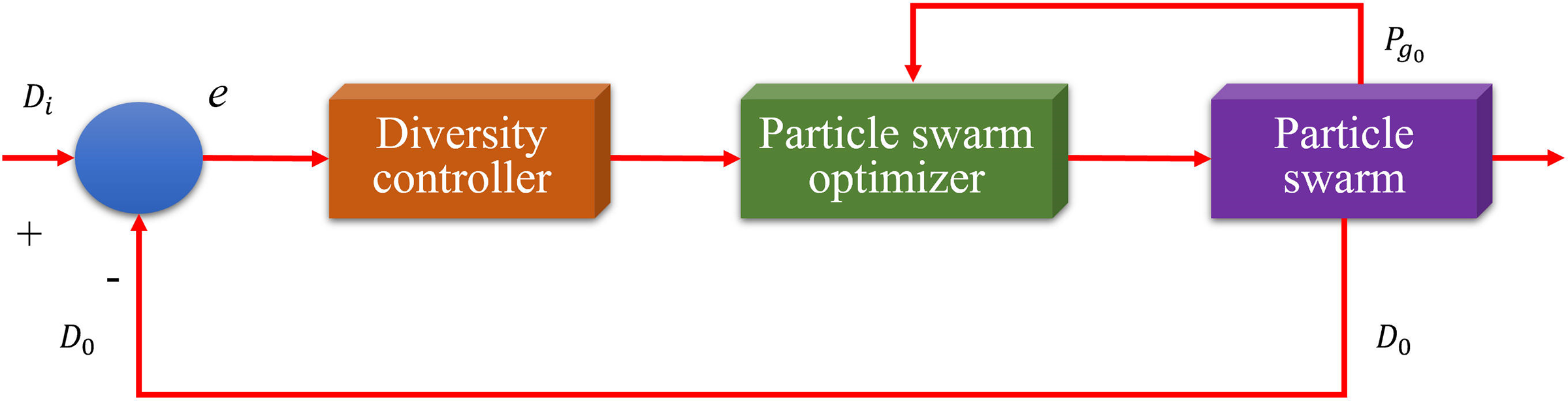
Figure 2: Self-organizing particle swarm algorithm model
There are three key issues that must be addressed when designing a model.
(a) How to effectively calculate and measure group diversity.
(b) How to determine the ideal diversity reference input to facilitate a global search.
(c) How to design the control strategy of the diversity controller so that the behavior of individual particles can be correctly adjusted according to the dynamics of the group.
In the bionic algorithm based on the group search method, although group diversity is not the research purpose of the algorithm, it is closely related to the global optimization performance of the algorithm. Therefore, this situation has attracted the attention of many researchers. Different from many previous studies, the self-organizing particle swarm algorithm not only focuses on group diversity but also uses group diversity as an explicit indicator to quantitatively reflect the evolutionary dynamics of the group. A self-organizing particle swarm algorithm is also used to guide the evolutionary behavior of particles. Therefore, to achieve this goal, we must first find reasonable methods for measuring group diversity [9,10].
Group diversity is used to characterize the differences in characteristics of individuals within a group. It is generally believed that the more dispersed the individuals are in the solution space, the better the group diversity; the more concentrated the distribution of individuals is, the worse the diversity of the population. At present, the main measures of population diversity include population distribution variance, population entropy, and average point distance [11,12].
Assume that individual
among
From this definition, the variance of the t-th generation group is
among
According to Eq. (2), in this study, the variance
If the solution space
where
As seen from the above definition, when all individuals in the group are the same. That is, when
Let the group size be N and the length of the longest diagonal in its search space be S. If the t-th generation individual
where
The three abovementioned measurement methods reflect the distribution of individuals in the group to varying degrees. However, as a measure of group diversity, each has its own advantages and disadvantages. The distribution variance of a group reflects only the degree of spatial deviation of the distribution of individuals in the group and cannot fully describe the degree of individual dispersion. For example, the population {1, 2, 3, 4, 5} consists of 5 individuals, and their variance is 2. The variance of population {1, 1, 1, 1, 5} is 2.56. Although the variance in the latter is greater than that in the former, the former has more evolutionary ability than does the latter. The population reflects the distribution of different types of individuals in the population but does not reflect the degree of dispersion of each individual in the population. In particular, it is difficult to predict the classification of individuals within the population during the actual calculation process. The calculation of group entropy depends on the correct cluster analysis of the group, so the calculation cost is relatively high. Therefore, groups are not practical [13,14].
In contrast, the average point distance defined by Eq. (5) reflects the distribution of individuals in the unit search space. This situation has nothing to do with the size of the population or the size of the search space. The above situation can better describe the density of individuals distributed in the solution space and is an ideal diversity measure. Therefore, for this paper, we choose the average point distance of the group as the measure of group diversity [15,16].
2.2 Determination of Diversity Reference Inputs
For the self-organizing particle swarm algorithm model in Fig. 2, the expectation is to utilize a negative feedback mechanism. By controlling the diversity reference input, the diversity of the particle population is maintained throughout the search period. Therefore, the diversity reference input
where
Under the control of the reference input
2.3 Design of Diversity Controllers
In the self-organizing particle swarm algorithm, the diversity controller adjusts the diversity of the group through the diversity increase operator and the diversity decrease operator. The method of this paper starts from the perspective of control parameters to seek adaptive control strategies to design diverse control rules [17,18].
For self-organizing particle groups, changes in group diversity are caused by changes in the behavior of individual particles. The system considers that the algorithm’s inertia weights and acceleration coefficients affect individual particle behavior differently. Therefore, in this study, we select parameters from two perspectives and adjust the divergence and aggregation of individual particles to achieve an increase or decrease in group diversity. This paper presents the diversity-controlled inertia weight (DCIW) and diversity-controlled acceleration coefficient (DCAC) methods.
2.3.1 Diversity Control Strategy Based on Inertia Weight
In the standard particle swarm algorithm, the inertia weight determines how much momentum the particles have to maintain inertial motion. To fundamentally overcome the premature birthtime problem in this study, individual particles must be able to fly over or escape with a larger momentum when they are in danger of falling into a local extreme. In the literature related to particle swarm optimization, the current selection of inertia weights relies mainly on experiments and experience. Most related studies refer to the work of Shi and Eberhard. Let
Although the system condition
(a) Diversity Adding Rules
When
(b) Diversity Reduction Rules
When
2.3.2 Diversity Control Strategy Based on the Acceleration Coefficient
Ozcan and Mohan performed a mathematical analysis of individual particle trajectories without inertial constraints. They found that individual particles fly in the solution space with sinusoidal trajectories, whose amplitude and frequency depend on the initial position, velocity, and acceleration coefficient. Kennedy carefully studied the impact of
(a) Diversity Increase Rules
When
(b) Diversity Reduction Rules
When
2.4 Simulation Experiments and Results Analysis
To verify the effectiveness of the algorithm in this paper, the performances of several algorithms proposed in this study were compared. These algorithms include the standard particle swarm optimization algorithm (SPSO), SOPSO-DCIW, SOPSO-DCAC, the SPSO algorithm with linear decreasing inertia weight (SPSO-LDIW), and the modified PSO algorithm with the time-varying acceleration constant method (MPSO-TVAC) [22,23].
Compared with that of the other algorithms, the population diversity of the SOPSO-DCIW algorithm changes slowly in the early stage and remains at the highest level; this shows that the algorithm performs the most complete global detection in the early stage. Although the algorithm slows down the early search speed, it prevents the algorithm from prematurely falling into local extremes. This approach is beneficial for subsequent global research. In the middle of the search process, the population diversity decreases at a relatively fast rate. Entering the later stage of the search, although the group diversity is already very small, an improvement in the optimal solution can still be observed; this shows that the diversity self-adjusting control inertia weight strategy can increase the effectiveness of the algorithm in controlling local mining and global detection. This method thereby improves its global convergence, which is why the SOPSO-DCIW algorithm has better average optimization performance.
Fig. 3 shows the impact of diverse reference inputs on algorithm performance, where the abscissa represents the evolutionary algebra. The ordinate represents the diversity, the dimension is 10, and the test function is the
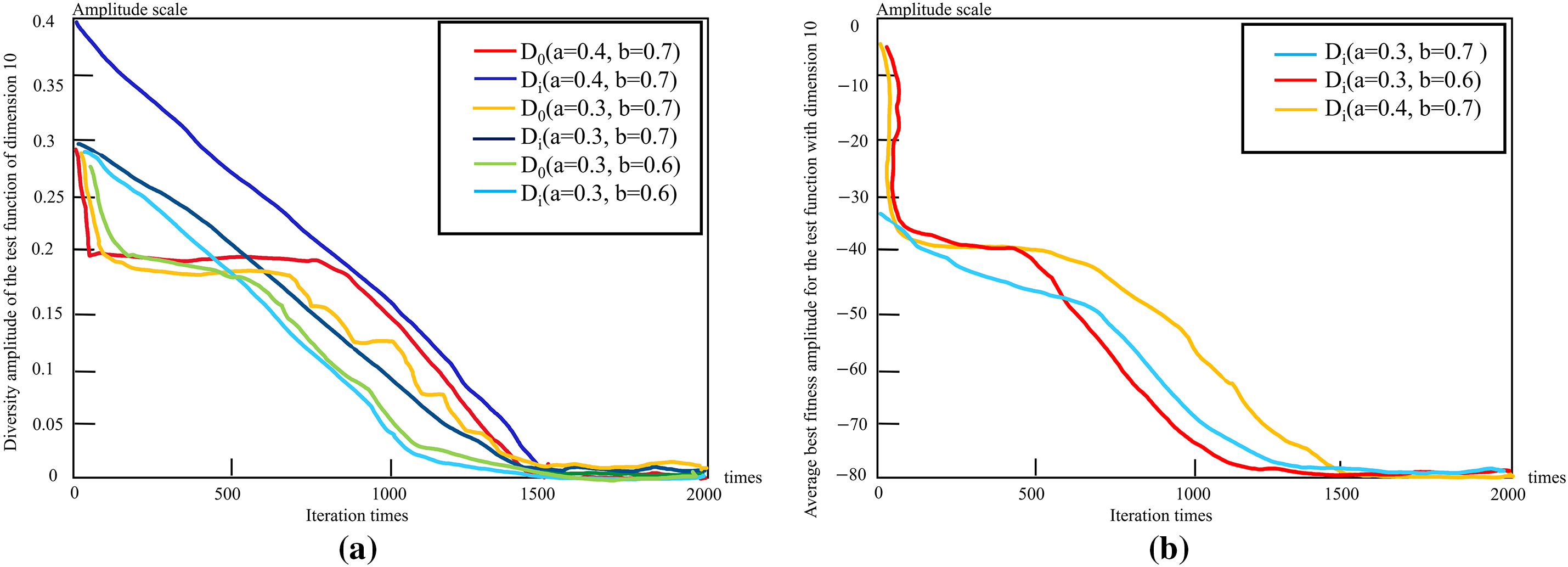
Figure 3: The impact of diverse reference inputs on the dynamic performance of the algorithm. (a) Group diversity; (b) Average optimal fitness value
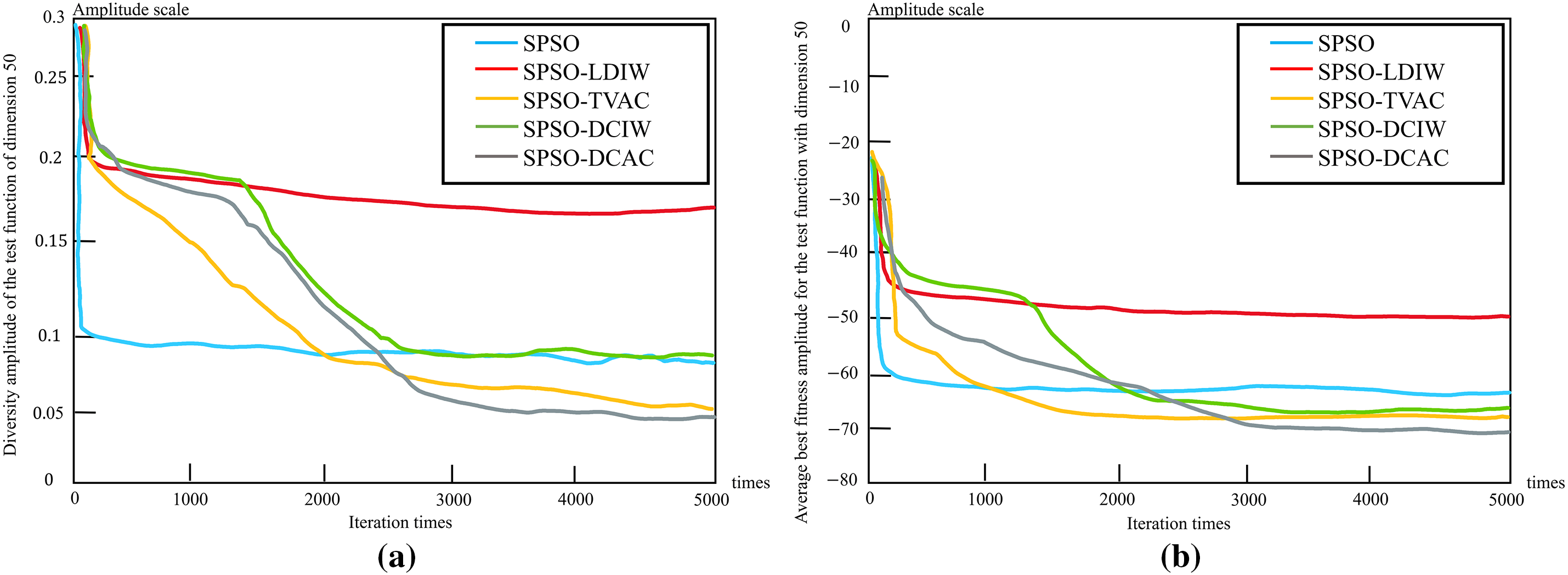
Figure 4: Different algorithms for optimizing the dynamic performance of the
Fig. 3a shows the performance of population diversity when the test function dimension is 10, and Fig. 3b shows the average best fitness value when the test function dimension is 10. Fig. 4a shows the performance of the population diversity when the test function dimension is 50, and Fig. 4b shows the average best fitness value when the test function dimension is 50. The strong fine search capability in the later stage continuously reduces the diversity of the group and accelerates the convergence of the algorithm. This approach significantly improves the quality of the solutions. These situations illustrate the effectiveness of the diversity control acceleration coefficient strategy and are also the fundamental reasons why SOPSO-DCAC has a good average optimization performance [23,24].
3 Application of the Self-Organizing Particle Algorithm in Constrained Layout Optimization
Layout optimization is a typical NP-hard problem and has a strong application background. Many practical engineering applications involve layout optimization problems, such as satellite cabin layout, mechanical assembly layout, and large-scale integrated circuit layout. Therefore, this topic has attracted widespread attention from researchers.
3.1 Constrained Layout Optimization Problem
Layout optimization involves optimally placing certain objects in a specific space according to certain requirements. During the layout process, the objects must usually be clothed, and the containers should not interfere with each other. In addition, space utilization should be improved as much as possible during the layout process. This type of problem has a layout without performance constraints. In addition, other performance constraints must be considered in some layout optimization problems, such as inertia, balance, and stability. These situations involve performance-constrained layouts, referred to as constrained layout optimization. Since layout optimization involves a variety of practical constraints, the solution space of this type of problem is usually nonconvex and discontinuous. Therefore, the above layout optimization is difficult to solve. In recent years, the use of smart computing has increased. People have begun to use different intelligent computing methods to solve this type of problem, such as analog annealing, genetic algorithms, and multiagent technology. As an emerging swarm intelligence computing method, the particle swarm algorithm is also suitable for solving NP-hard problems similar to constrained layout optimization problems.
In our research, artificial satellite cabin layout design was used as the background. This work also studied the layout optimization problem with performance constraints, as shown in Fig. 5. In a rotating satellite cabin, a circular partition is provided perpendicular to the central axis of the cabin. An artificial satellite cabin requires the needed system functional components, such as instruments and equipment. These elements are called objects. The items to be clothed are optimally arranged on these circular partitions. The objects to be clothed on each rotating partition should be gathered toward the center of the container as much as possible while meeting the series of constraint requirements. When the system is stationary, the static imbalance on the diaphragm is less than the allowable value. At a given angular velocity, the dynamic imbalance of each object to be clothed is less than the allowable value. If it is assumed that the objects to be clothed are all cylinders, the problem can be reduced to a balancing layout problem involving a rotating round table [25].
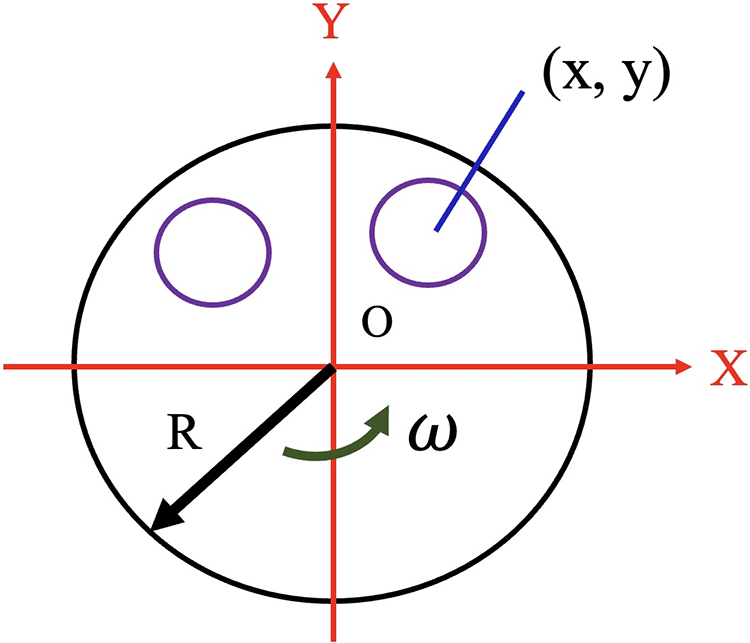
Figure 5: Schematic diagram of the layout of circular items to be clothed on the rotating partition
Assume that the radius of the round table is R, the table rotates at an angular speed
Moreover, the following constraints are satisfied, as Eqs. (9)–(11).
here,
3.2 The SOPSO Algorithm for Solving Constrained Layout Optimization Problems
This paper will use SOPSO to solve the two-dimensional constrained layout problem described by Eqs. (8)–(11). For this reason, the common penalty function method is used to address the constraints of the problem. First, construct the penalty function as an Eq. (12).
where
For convenience, the polar coordinate encoding method is used, and the centroid O of the round table is used as the pole to establish the polar coordinate system. Then, the polar coordinates of the centroid
This can transform the constrained layout optimization problem into the following unconstrained optimization problem, as Eq. (15).
In the above problem, if there are n objects to be distributed, the search space of the algorithm is 2n-dimensional, in which any particle represents a candidate solution of the objective function. This candidate solution can be expressed as a 2n-dimensional polar coordinate vector
SOPSO is used to solve the performance-constrained layout problem described by Eq. (8). In our research, the problem is essentially transformed into an unconstrained optimization problem that solves Eq. (15), and its algorithm flow can be described as follows:
(1) Letting t = 0, initialize the diversity input and diversity output of the system.
(2) Randomly initialize the particle population (particle size is N) in the feasible solution space, including the position, speed, and best position of each particle; the best position of the group; and the control parameters of the particles.
(3) Calculate the function value of each particle and update the historical best position of each particle and the best position of the group.
(4) The diversity input and output of the system are updated, and the control parameters are adjusted according to the control rules.
(5) If the termination condition is met, the algorithm ends. Otherwise, let t = t + 1 and continue Step (6).
(6) Update the particle group, including the position and speed of each particle, and return to Step (3).
3.3 Example Application and Result Analysis
For this research, our proposed method selected a more complex 40-circle constrained layout optimization problem to observe the optimization performance of the SOPSO algorithm. The results were compared and analyzed with those of the human-computer interaction genetic algorithm (HCIGA) and the particle swarm optimization algorithm with a mutation operator (MPSO). The radius of the circular container is R = 880 mm, and 40 circular objects are laid out on it. Given that the allowable value of the static unbalanced J is
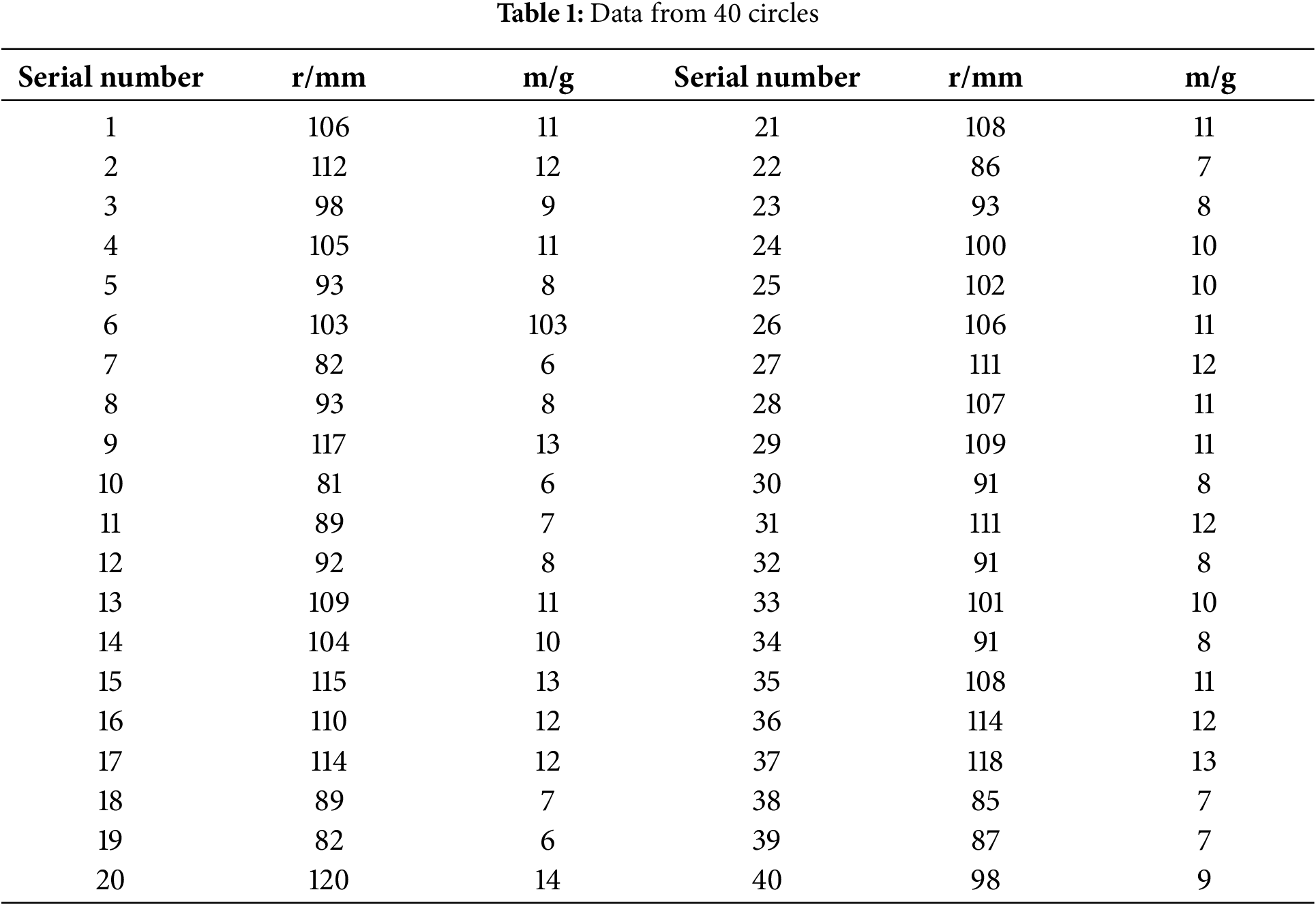
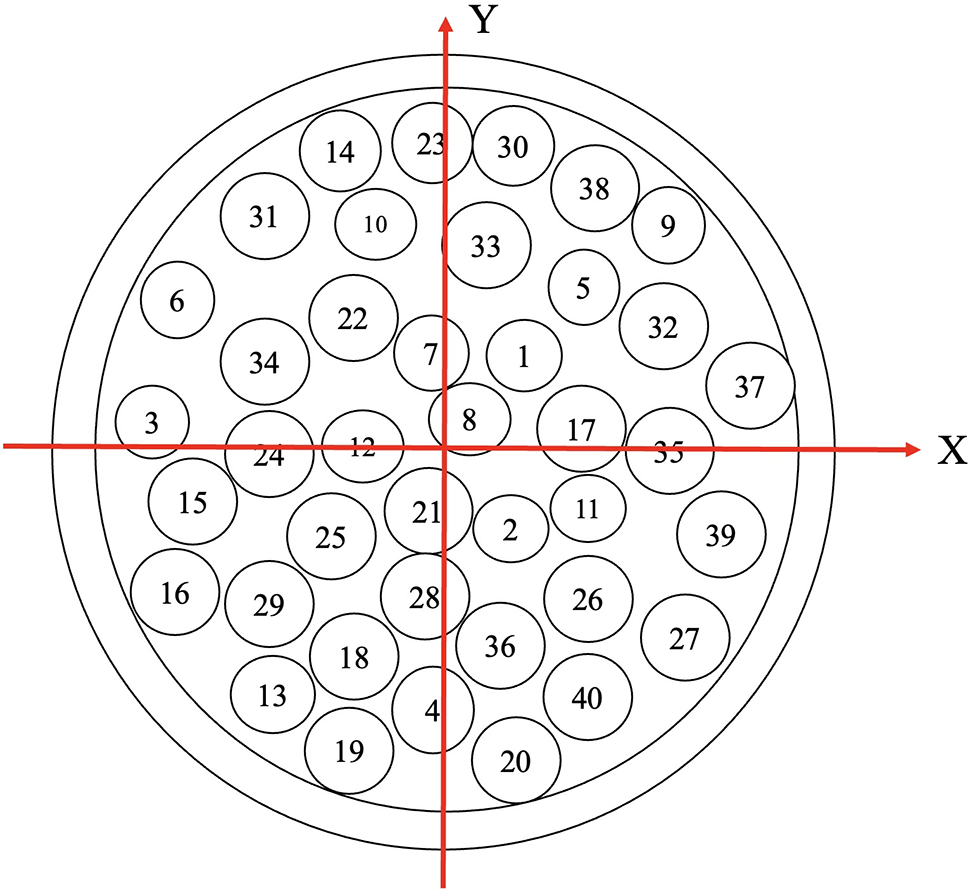
Figure 6: Schematic chart of the SOPSO algorithm layout results

Fig. 6 shows the optimal layout obtained by SOPSO when all the performance constraints are met. The figure shows that the outer large circle is the circular container, and the inner large circle is the outer enveloping circle in the optimal layout. There are 40 circles within the outer circle that do not interfere with each other. Table 2 records the constraint performance corresponding to the optimal layout. In addition, the system includes the best results obtained by the HCIGA and MPSO when solving this problem. Obviously, the optimal layouts obtained by these three algorithms all achieve noninterference between each waiting cloth and between containers. Therefore, the interference amount of each algorithm in this table is zero. Under this premise, the operator observes that the outer envelope circle radius HCIGA in each layout is 870.331 mm. The MPSO is 843.940 mm long, while the SOPSO is 816.650 mm long. Obviously, the envelope circle radius obtained by SOPSO is much smaller than that obtained by MPSO and the HCIGA. This shows that the layout results of SOPSO can better achieve the goal of gathering the items to be clothed toward the center as much as possible. At this time, although the static imbalance in the SOPSO layout is slightly greater than that in the other two algorithms, the static imbalance is also far less than the needed given value. The above results illustrate the effectiveness of SOPSO in complex constrained layout optimization problems.
The method proposed in this work starts from the nature of crowd intelligence and treats the particle group as a self-organizing system, which uses group diversity as a key factor affecting the behavior of individual particles and an important indicator of group dynamics. This method introduces a diversity feedback mechanism to control the evolutionary dynamics of the group, and this method also proposes a self-organizing particle swarm algorithm (SOPSO) model. By analyzing the different effects of algorithm parameters on the behavior of individual particles, the above method proposes two strategies for controlling the inertia weight and acceleration coefficient to increase and decrease the diversity of particle groups, respectively. By controlling the linear reference input of the system, the SOPSO algorithm can effectively improve the diversity level of the group during the entire search period, and the SOPSO algorithm can also appropriately adjust the evolvability of the group according to the search dynamics. The system thus effectively overcomes the premature convergence of the algorithm. The relevant experimental results show that if the SOPSO algorithm is compared with other typical improved particle swarming algorithms, SOPSO-DCIW and SOPSO-DCAC have better average optimization performances. In the experiment, it was found that when the system searches for global detection via the early adjustment algorithm, it is more effective to control the inertia weight than to control the acceleration coefficient. When the system searches for the local search of the later adjustment algorithm, it is more effective to adjust the acceleration coefficient than to adjust the inertia weight. With the successful application of the system in the two-dimensional constrained layout problem based on the satellite cabin layout, the above examples illustrate that the method model proposed in this paper has certain practical value.
Acknowledgement: This research was supported by the Department of Information Technology, Takming University of Science and Technology and Department of Electrical Engineering at the National Chin-Yi University of Technology. The authors would like to thank the National Chin-Yi University of Technology, Takming University of Science and Technology, Taiwan, for supporting this research.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: Conceptualization, Wen-Tsai Sung; methodology, Sung-Jung Hsiao; formal analysis, Wen-Tsai Sung; writing—original draft preparation, review and editing, Sung-Jung Hsiao. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data sharing does not apply to this article as no datasets were generated or analyzed during the current study.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Murala P, Nayak K, Kumar KV, Vishwakarma S. Bio-inspired algorithms for self-healing and adaptation in sensor networks. In: 2024 IEEE 13th International Conference on Communication Systems and Network Technologies (CSNT); 2024 Apr 6–7; Jabalpur, India. [Google Scholar]
2. Xu B. Research on the application of PSO algorithm in aviation control flight plan path search. In: 2024 IEEE 2nd International Conference on Sensors, Electronics and Computer Engineering (ICSECE); 2024 Aug 29–31; Jinzhou, China. [Google Scholar]
3. Zhang Z, Cheng X, Xing Z, Wang Z, Qin Y. Optimal sizing of battery-supercapacitor energy storage systems for trams using improved PSO algorithm. J Energy Storage. 2023;73(3):108962. doi:10.1016/j.est.2023.108962. [Google Scholar] [CrossRef]
4. Zhang Z, Cheng X, Xing Z, Wang Z. Energy management strategy optimization for hybrid energy storage system of tram based on competitive particle swarm algorithms. J Energy Storage. 2024;75(1):109698. doi:10.1016/j.est.2023.109698. [Google Scholar] [CrossRef]
5. Mammeri E, Necaibia A, Ahriche A, Bouraiou A, Hassani I. A hybrid GWO-PSO algorithm for global MPP tracking in PV systems under PSCs. In: 2023 Second International Conference on Energy Transition and Security (ICETS); 2023 Dec 12–14; Adrar, Algeria. [Google Scholar]
6. Zhao C, Guo D. Particle swarm optimization algorithm with self-organizing mapping for Nash equilibrium strategy in application of multiobjective optimization. IEEE Trans Neural Netw Learn Syst. 2021;32(11):5179–93. doi:10.1109/TNNLS.2020.3027293. [Google Scholar] [PubMed] [CrossRef]
7. Zhou L, Cui Y. Parameter optimization and its application of support vector machines based on improved particle swarm optimization algorithm. In: 2022 4th International Conference on Intelligent Information Processing (IIP); 2022 Oct 14–16; Guangzhou, China. [Google Scholar]
8. Wu H, Wang L, Li X, Huang Y, Zhou H. User-adjustable capability mining technology based on improved PSO and LSTM model. In: 2022 4th International Conference on Electrical Engineering and Control Technologies (CEECT); 2022 Dec 16–18; Shanghai, China. [Google Scholar]
9. Song Z, Xia Z. Carbon emission reduction of tunnel construction machinery system based on self-organizing map-global particle swarm optimization with multiple weight varying models. IEEE Access. 2022;10(10):50195–217. doi:10.1109/ACCESS.2022.3173735. [Google Scholar] [CrossRef]
10. Mujawar S, Gupta J. A statistical perspective for empirical analysis of bio-inspired algorithms for medical disease detection. In: 2022 International Conference on Emerging Smart Computing and Informatics (ESCI); 2022 Mar 9–11; Pune, India. [Google Scholar]
11. Sun J, Yang Y, Wang Y, Wang L, Song X, Zhao X. Survival risk prediction of esophageal cancer based on self-organizing maps clustering and support vector machine ensembles. IEEE Access. 2020;8:131449–60. doi:10.1109/ACCESS.2020.3007785. [Google Scholar] [CrossRef]
12. Dong J, Chen X, Zhang J, Li Z. Global path planning algorithm for USV based on IPSO-SA. In: 2019 Chinese Control and Decision Conference (CCDC); 2019 Jun 3–5; Nanchang, China. [Google Scholar]
13. Wang Z, Fu Y, Song C, Zeng P, Qiao L. Power system anomaly detection based on OCSVM optimized by improved particle swarm optimization. IEEE Access. 2019;7:181580–8. doi:10.1109/ACCESS.2019.2959699. [Google Scholar] [CrossRef]
14. Ma R, Xia C, Xu Z, Zhou H, Shi L, Zhang Q. Improved PSO-based parameters optimization of ESS’s active and reactive controllers. In: 2020 12th IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC); 2020 Sep 20–23; Nanjing, China. [Google Scholar]
15. Deng Y. Sliding mode variable structure controller for PSO-RBF hypersonic vehicle. In: 2018 International Computers, Signals and Systems Conference (ICOMSSC); 2018 Sep 28-30; Dalian, China. [Google Scholar]
16. Atiah FD, Helbig M. Dynamic particle swarm optimization for financial markets. In: 2018 IEEE Symposium Series on Computational Intelligence (SSCI); 2018 Nov 18–21; Bangalore, India. [Google Scholar]
17. Idoko GO. Drive path optimization for electric vehicles using particle swarm optimization. In: 2023 13th International Symposium on Advanced Topics in Electrical Engineering (ATEE); 2023 Mar 23–25; Bucharest, Romania. [Google Scholar]
18. Tian W, Zhu J, Cheng W, Bao J. PSO algorithm with decreasing inertia weights based on sigmoid function. In: 2024 2nd International Conference on Algorithm, Image Processing and Machine Vision (AIPMV); 2024 Jul 12–14; Zhenjiang, China. [Google Scholar]
19. Dayal N, Srivastava S. An RBF-PSO based approach for early detection of DDoS attacks in SDN. In: 2018 10th International Conference on Communication Systems & Networks (COMSNETS); 2018 Jan 3–7; Bengaluru, India. [Google Scholar]
20. Li J, Su J. Robot global path planning based on improved second-order PSO algorithm. In: 2022 IEEE International Conference on Mechatronics and Automation (ICMA); 2022 Aug 7–10; Guilin, China. [Google Scholar]
21. Han HG, Lu W, Hou Y, Qiao JF. An adaptive-PSO-based self-organizing RBF neural network. IEEE Trans Neural Netw Learn Syst. 2018;29(1):104–17. doi:10.1109/TNNLS.2016.2616413. [Google Scholar] [PubMed] [CrossRef]
22. Abbas G, Gu J, Farooq U, Raza A, Asad MU, El-Hawary ME. Solution of an economic dispatch problem through particle swarm optimization: a detailed survey—part II. IEEE Access. 2017;5:24426–45. doi:10.1109/ACCESS.2017.2768522. [Google Scholar] [CrossRef]
23. Hu H, Feng J, Zhai X, Guan X. The method for single well operational cost prediction combining RBF neural network and improved PSO algorithm. In: 2018 IEEE 4th International Conference on Computer and Communications (ICCC); 2018 Dec 7–10; Chengdu, China. [Google Scholar]
24. Makhloufi S, Mekhilef S. Logarithmic PSO-based global/local maximum power point tracker for partially shaded photovoltaic systems. IEEE J Emerg Sel Top Power Electron. 2022;10(1):375–86. doi:10.1109/JESTPE.2021.3073058. [Google Scholar] [CrossRef]
25. Tehsin S, Rehman S, Saeed MOB, Riaz F, Hassan A, Abbas M, et al. Self-organizing hierarchical particle swarm optimization of correlation filters for object recognition. IEEE Access. 2017;5:24495–502. doi:10.1109/ACCESS.2017.2762354. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools