
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Visible-Infrared Person Re-Identification via Quadratic Graph Matching and Block Reasoning
1 Faculty of Computer and Software Engineering, Huaiyin Institute of Technology, Huaian, 223003, China
2 Jiangsu Suyan Jingshen Co., Ltd., Huaian, 223003, China
* Corresponding Author: Jialin Ma. Email:
Computers, Materials & Continua 2025, 84(1), 1013-1029. https://doi.org/10.32604/cmc.2025.062895
Received 30 December 2024; Accepted 26 March 2025; Issue published 09 June 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The cross-modal person re-identification task aims to match visible and infrared images of the same individual. The main challenges in this field arise from significant modality differences between individuals and the lack of high-quality cross-modal correspondence methods. Existing approaches often attempt to establish modality correspondence by extracting shared features across different modalities. However, these methods tend to focus on local information extraction and fail to fully leverage the global identity information in the cross-modal features, resulting in limited correspondence accuracy and suboptimal matching performance. To address this issue, we propose a quadratic graph matching method designed to overcome the challenges posed by modality differences through precise cross-modal relationship alignment. This method transforms the cross-modal correspondence problem into a graph matching task and minimizes the matching cost using a center search mechanism. Building on this approach, we further design a block reasoning module to uncover latent relationships between person identities and optimize the modality correspondence results. The block strategy not only improves the efficiency of updating gallery images but also enhances matching accuracy while reducing computational load. Experimental results demonstrate that our proposed method outperforms the state-of-the-art methods on the SYSU-MM01, RegDB, and RGBNT201 datasets, achieving excellent matching accuracy and robustness, thereby validating its effectiveness in cross-modal person re-identification.Keywords
Person re-identification (ReID) is the task of retrieving pedestrian images captured by different cameras. Existing ReID methods primarily focus on matching visible light images [1,2], addressing the unimodal problem. However, conventional visible surveillance cameras cannot effectively capture pedestrian information under poor lighting conditions [3,4]. To address this challenge, modern surveillance cameras can automatically switch to infrared mode to capture infrared images under low-light conditions [5]. Consequently, the research on visible-infrared (VI) person re-identification has emerged, with the goal of identifying the same person from a visible/infrared image database when given an image from the other modality. Due to the importance of this task in nighttime intelligent monitoring and public safety, it has recently gained widespread attention [6,7], and significant progress has been made in the VI-ReID field.
However, most existing methods [8,9] perform recognition by mapping features to a shared space, which often results in poor performance due to feature loss—critical modality-specific attributes are suppressed during alignment, leading to ambiguous representations. Therefore, we aim to explore a reliable cross-modal person re-identification solution that preserves modality-invariant identity cues without sacrificing discriminative details.
Recently, some studies have focused on finding correspondences between different modalities [10,11]. However, most methods, as shown in Fig. 1, tend to extract common features for modality alignment, which often leads to the loss of local information and fails to fully utilize the global information between different identities. Additionally, regarding the issue of cluster imbalance, many methods [12,13] discard certain clusters when correspondences cannot be found, further increasing the gap between modalities. To address this, we propose a quadratic graph matching (QGM) method to prevent local information loss and make full use of clustering results. This method primarily connects the two modalities through graph matching and adopts a quadratic matching strategy to tackle the cluster imbalance problem.
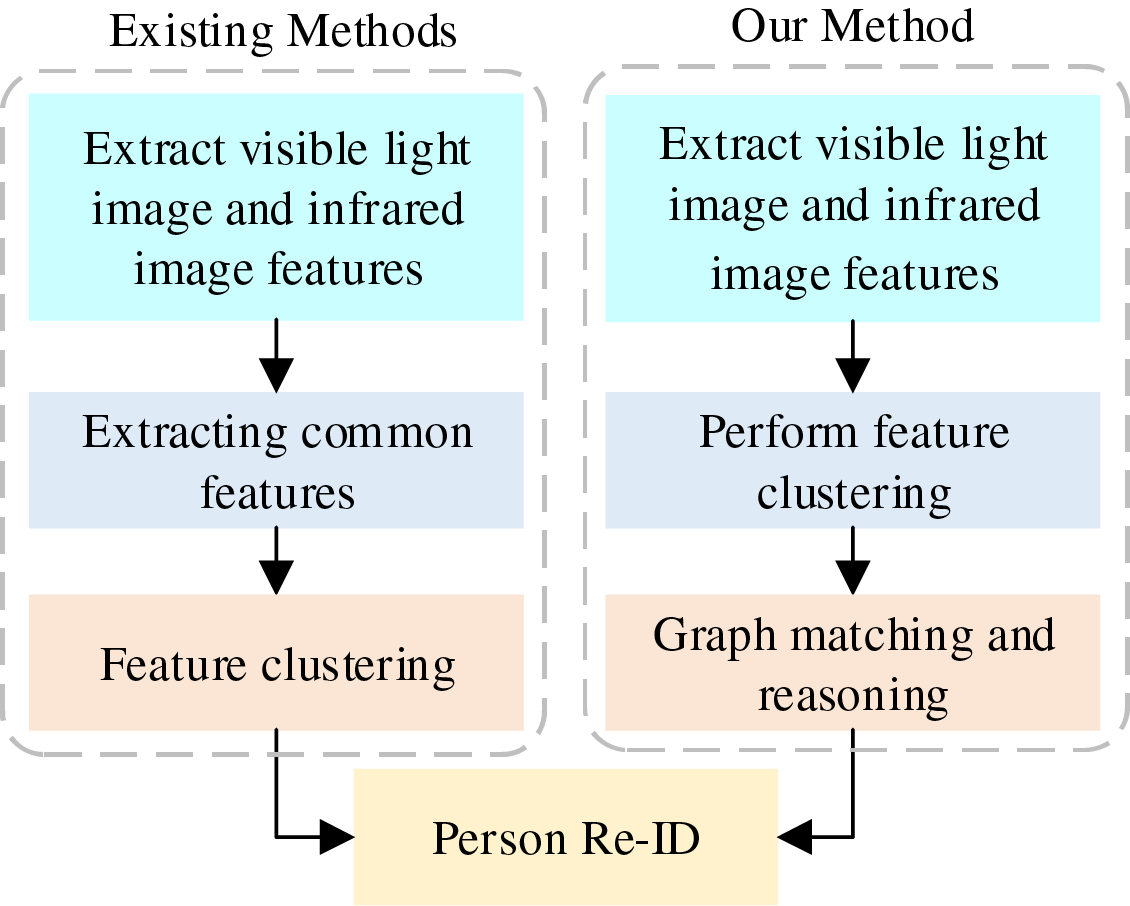
Figure 1: The difference between our method and existing methods
First, we fully leverage the relationships between different identities using graph matching, which is processed under global constraints. This approach transforms the process of discovering cross-modal correspondences into a bipartite graph matching problem, where each modality is viewed as a graph, and each cluster’s representative sample is treated as a node. The matching cost between nodes is positively correlated with the distance between clusters. By minimizing the global matching cost, graph matching generates more reliable global correspondences rather than local feature alignments. A large body of research [14–16] has demonstrated the advantages of graph matching in establishing correspondences between feature sets. Inspired by this, we construct graphs for each modality and connect the same person across different modalities.
Basic graph matching struggles to solve the cross-modal cluster imbalance problem. To address this, we propose a quadratic matching strategy. Due to variations in camera settings, similar samples may be assigned to different clusters, and these new clusters lack correspondences, which affects the reduction of modality gaps. By using dynamic quadratic matching, we progressively find correspondences for each cluster. Subgraphs of the bipartite graph in one matching process are continuously updated based on previous matching results until each cluster finds a correspondence. Through this strategy, the same identity in different clusters can find the same cross-modal correspondence, thereby solving the imbalance issue while enhancing intra-class compactness.
To speed up pedestrian image retrieval and updates, we also propose a Block Reasoning (BR) module, which can more efficiently utilize the affinity information between images. Specifically, we first partition the database images according to bipartite graph nodes and combine these node images to form new database images. Furthermore, similar to most existing methods [17–19], we compute affinity matrices for query-database and database-database pairs, and use these two matrices to adjust the measured distance. By finding the matching nodes based on the distance, we can then identify the pedestrian’s identity based on the node’s class. At the same time, the block structure allows for efficient updating of the database images through image comparisons.
Our main contributions are summarized as follows:
• We propose the QGM method for mining reliable cross-modal correspondences in VI-ReID. First, modality graphs are constructed and graph matching is performed to integrate global information between identities. Then, a quadratic matching strategy is applied to address the cluster imbalance problem, making the matching process more adaptive.
• We introduce the BR module, which not only enables efficient matching using the relationships between pedestrians but also facilitates dynamic data updates.
• Comprehensive experimental results validate the effectiveness of the proposed framework. Under various test conditions, the performance of the proposed method outperforms the state-of-the-art methods.
2.1 Visible-Infrared Person ReID
The visible-infrared (VI) person re-identification task focuses on matching pedestrian images captured by visible light and infrared cameras. Existing methods can mainly be categorized into two types based on feature processing approaches: generative methods and non-generative methods. Generative Methods: These methods [20] focus on reducing the style differences between modalities. The mainstream approach is to use Generative Adversarial Networks (GANs) for modality translation. For example, MUNIT-GAN [15] and AttGAN [21] utilize GANs to perform unsupervised image-to-image translation across multiple modalities. However, these methods often increase the computational load of the model and may introduce additional noise. In contrast, non-generative methods directly exploit raw features without data synthesis. Recent advances include semantic-driven frameworks like CLIP-Driven [22], which align cross-modal semantics using vision-language models but require costly text annotations; spatio-temporal aggregation techniques [23] that enhance temporal consistency in video sequences at the expense of high computational complexity; and multi-view clustering approaches [24,25], which complete incomplete multi-view data via tensor decomposition or manifold learning but rely on the restrictive assumption of aligned inputs. To address these limitations, the proposed method achieves unsupervised cross-modal alignment through quadratic graph matching and block reasoning, eliminating the need for manual annotations or complex fusion frameworks.
2.2 Graph Matching for Person ReID
In unimodal ReID, graph matching is mainly used in two ways: one is to divide pedestrian images into multiple parts, treating local features as nodes in the graph and using graph matching to align features of pedestrians under different poses and occlusion scenarios [26,27]. The other is to model pedestrian images as a graph structure, where nodes represent feature points and edges represent the relationships between features. Graph matching is used to analyze and compare the structural similarity between different images [28,29]. However, in VI-ReID, the cross-modal differences are much larger than the cross-camera differences within a single modality. Therefore, we construct a graph for each modality and use graph matching to discover the cross-modal correspondences. Recent work [30] proposed progressive graph matching for VI-ReID. However, their method relies on alternating optimization between feature learning and graph matching, which may lead to suboptimal convergence. In contrast, our quadratic graph matching dynamically resolves cluster imbalance through iterative subgraph updates, ensuring that all clusters find correspondences without discarding outliers. Additionally, we integrate a center search mechanism to select representative nodes with minimal variance, further enhancing matching stability.
2.3 Inference Methods for VI-ReID
Most existing methods [31,32] perform inference using simple distance metrics, such as calculating Euclidean or Mahalanobis distances between output features to measure similarity. Although these methods are simple and intuitive, they treat each database image as an independent entity and ignore the potential relationships between database images, leading to the loss of valuable affinity data, which in turn affects the matching performance. To address this issue, the similarity inference metric proposed in [33] incorporates the calculation of Jaccard distance between database images to optimize the matching. However, Jaccard distance only considers the presence or absence of elements and ignores specific similarity scores, thus limiting its effectiveness to some extent. In response, the affinity inference metric proposed in [34] considers the similarity between database images but requires recalculating large amounts of data when querying or updating the database images. To address this, we propose the BR module.
This chapter provides a detailed description of the method we propose. The overall framework of the method is shown in Fig. 2). We utilize the Dual Contrastive Learning (DCL) framework (on the left side of Fig. 2) to learn discriminative features within each modality and optimize them using modality-specific contrastive loss functions. Furthermore, based on DCL, we introduce the innovative methods presented in this paper, focusing on the novel QGM module (in the center of Fig. 2) and the BR module during the testing phase (on the right side of Fig. 2). The QGM module consists of two parts: the center search, which selects representative points that are not affected by outliers by analyzing the relationships between sample points and cluster centers using variance; and the construction of a graph to establish modality correspondence. The BR module leverages the matching results from graph matching to partition the image gallery, calculating the affinity distance between blocks to achieve more accurate person re-identification. Additionally, it uses the advantages of blocks to enable fast updating of the image gallery. The detailed descriptions of these two modules are provided in Sections 3.2 and 3.3.
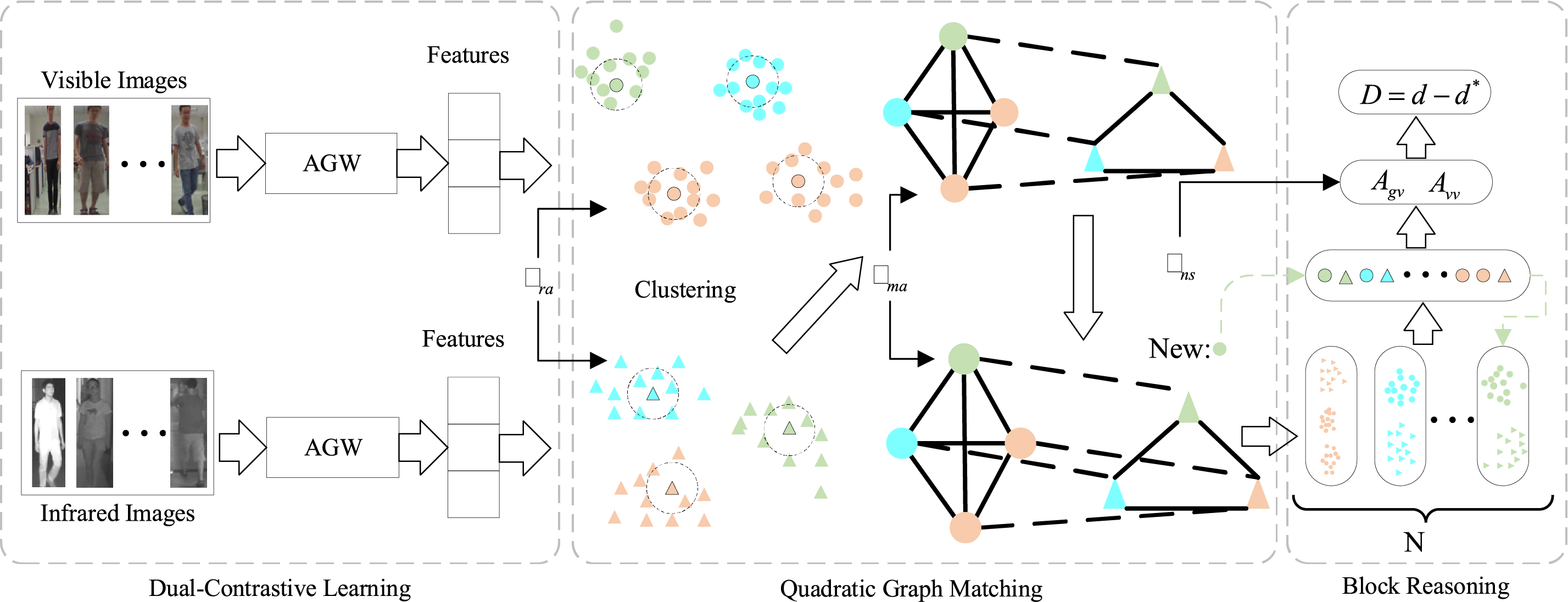
Figure 2: The pipeline of our framework. Different colors indicate different pedestrians
3.1 Dual-Contrastive Learning Framework
To clearly describe the method, let
We use AGW as our feature extraction framework, which is based on the ResNet50 backbone to extract features from visible and infrared images, respectively. The extracted feature sets are then clustered using DBSCAN. Subsequently, the contrastive loss functions in Eq. (1) are applied to train the model separately on visible and infrared clusters.
Let
In the DCL module described above, we did not directly address the relationship between the two modalities. Therefore, when the gap between the two modalities is significant, the above method cannot be applied. To address the cross-modal correspondence problem, we propose the QGM module. Prior to matching, we first perform center search, which serves as the foundation for graph matching. The feature distribution results after quadratic graph matching are shown in Fig. 3.
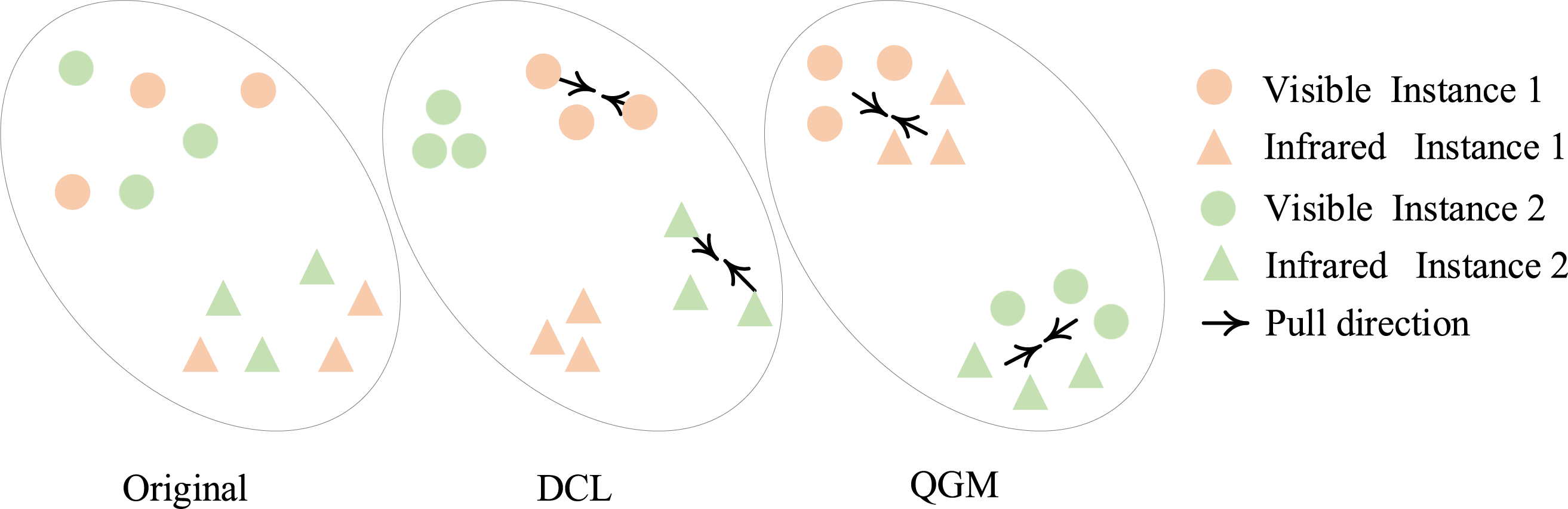
Figure 3: The effect of the original feature after DCL and QGM processing
The Center Search Module is designed to select the most representative sample points from each cluster, overcoming the interference of outliers and enhancing the robustness of cross-modal alignment. Its core idea is to choose the point that is most consistent with the sample distribution of the same class, based on the stability (variance) of the distance distribution rather than just geometric distance. Compared to traditional methods, such as using K-means to directly select centroids, this approach better adapts to noisy data distributions.
First, the initial distances are calculated, and candidate points are selected. For a given cluster, we compute the Euclidean distance from each point to the current cluster centroid and sort these distances in ascending order. The top ten sample points with the smallest distances form the candidate point set
where
Furthermore, we construct two graphs,
where
After this node matching process, we assume that there are remaining nodes in graph
where
During the testing phase, pedestrian image matching based on Euclidean or cosine distance is quite limited. While Euclidean distance directly measures the geometric distance between features and cosine distance evaluates angular similarity, both approaches assume that feature relationships are independent, ignoring contextual correlations among samples. This limitation results in reduced robustness under modality variations. These methods often overlook the relationships between images or treat the entire image gallery as a whole, leading to excessive computational overhead during image updates. To overcome these limitations, we introduce the BR module, which dynamically constructs affinity groups based on the relational structure of samples rather than relying solely on pairwise distance metrics. Specifically, we can adjust the distance by utilizing gallery images that exhibit high affinity with the query image. BR captures the latent affinity information between gallery images and incorporates it into the distance calculation, thereby optimizing the matching performance. The detailed distance updating process is shown in Fig. 4.
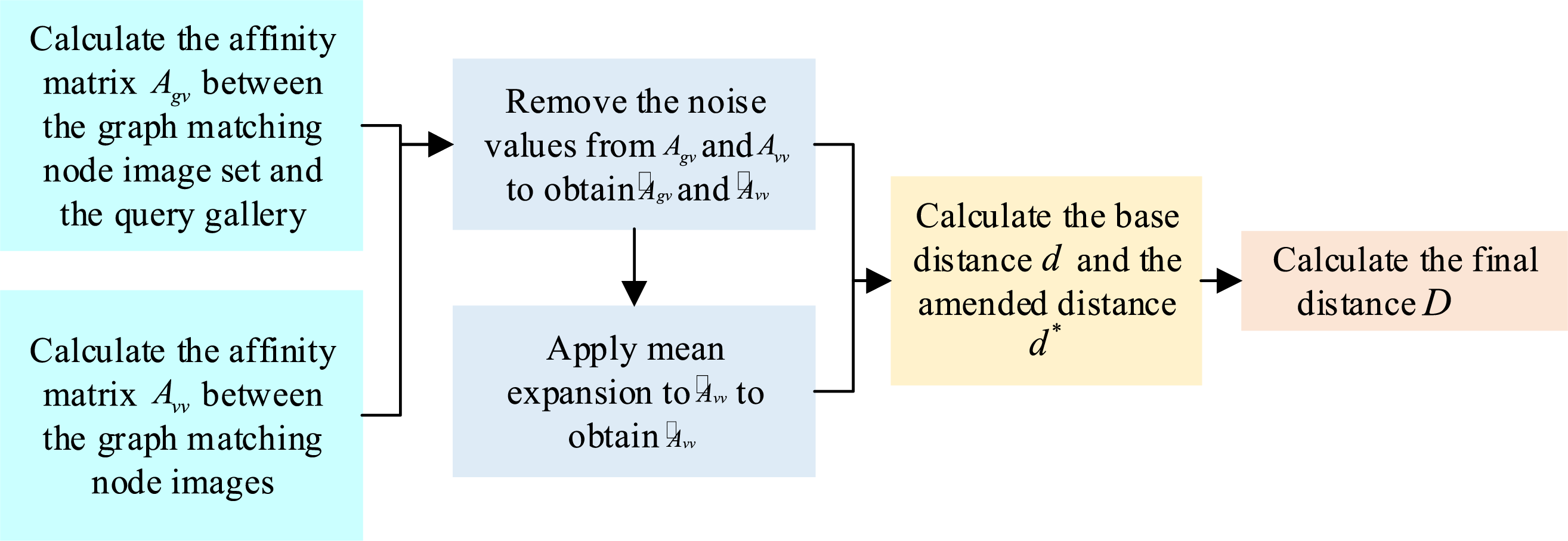
Figure 4: Distance update process diagram
Based on the graph matching results mentioned earlier, we group the matched nodes corresponding to the visible and infrared datasets into blocks, ultimately forming N blocks. When the number of visible nodes exceeds the number of infrared nodes, the number of blocks, N, represents the number of infrared nodes. Conversely, if the number of visible nodes is fewer than the infrared nodes, N represents the number of visible nodes. In addition, we construct two affinity matrices: one is the affinity matrix,
We compute the affinity matrix,
where
The dual-contrastive loss aims to bring together images of the same identity while pushing away those with low similarity. However, the associative information between low-similarity images is often too weak to be effectively utilized and may introduce noise, which interferes with subsequent distance calculations, leading to inaccurate results. Therefore, we need to eliminate these noise values.
To address this issue, we introduce a noise suppression mechanism to reduce the impact of inaccurate affinity values on matching. We define a threshold,
To further improve the suppression of inaccurate similarity information during the task execution and ensure the model focuses on meaningful associations, we propose a noise suppression loss function,
where
where
Initially, we use cosine similarity for
The affinity reasoning module works such that if a query image is similar to a node image, the distance between the query image and the similar node images should be reduced. The distance reduction depends on the distances between the query image and the node image’s similar images. Therefore, the corrected distance between each query image and each node image can be represented by Eq. (12).
Finally, by subtracting the corrected distance between images from the base distance,
Based on the final distance, we query the two closest images for any given query image. If both images belong to the same data block, we classify the query image under that block’s label. If the two images come from different data blocks, we further compute the average cosine similarity between the query image and each of the two blocks, and the block with the higher score determines the label identity for the query image. For data updates, new data only needs to be compared with the node image dataset, and classification is done based on the scoring results.
The overall loss function
where
In this section, we first introduce the datasets and experimental details. Then, experiments are conducted on two publicly available datasets. Finally, a detailed analysis of QGM-BR is presented.
We evaluate the proposed method on three widely used visible-infrared datasets, SYSU-MM01 [35], RegDB [36] and RGBNT201 [37].
SYSU-MM01 Dataset. This dataset contains images of 1900 pedestrians from six different viewpoints. Each pedestrian has images captured from two visible light viewpoints, along with one thermal infrared viewpoint. It is one of the most challenging datasets for cross-modal person re-identification. Testing on the SYSU-MM01 dataset is conducted under two settings: full retrieval mode and indoor retrieval mode. In full retrieval mode, the gallery consists of visible light images, while the query set consists of infrared images. In indoor retrieval mode, visible light images from outdoor scenes (cameras 4 and 5) are excluded.
RegDB Dataset. This dataset contains 412 identities, each with 10 RGB images and 10 thermal images. The dataset includes 254 females and 158 males. Among the 412 identities, 156 were captured from the front, and 256 from the back. The RegDB dataset contains two testing settings: infrared to visible light and visible light to infrared modes.
RGBNT201 Dataset. This dataset is a pedestrian image database that includes three modalities: visible light, infrared, and thermal imaging. According to the original data split, the training subset consists of 141 classes (3280 visible light images and 3280 infrared images), while the test subset consists of 30 classes (836 visible light images and 836 infrared images). In practice, we only use the visible light and infrared images from each class for experimentation. Similar to the evaluation on the RegDB dataset, two retrieval modes are used: Visible to Thermal and Thermal to Visible. In the Visible to Thermal retrieval mode, the probe set is constructed by randomly selecting 10 visible light images from each class in the test set, while the gallery set contains all infrared images from the test set. The Thermal to Visible retrieval mode has a similar probe and gallery structure, but with the modality configuration reversed. For both retrieval modes, the final results are reported as the average of ten tests.
During the training phase, we use a non-local module enhanced network based on AGW [14], with ResNet50 [38] as the feature extractor. The backbone network is initialized with pre-trained weights from ImageNet. In each mini-batch, the number of classes P and the number of samples per class K are both set to 8. All pedestrian images are resized to 256 × 128 pixels. The model is trained using the SGD optimizer, with an initial learning rate of 0.1 for randomly initialized parameters and 0.01 for pre-trained parameters. The learning rate is reduced by a factor of 10 at epochs 20 and 50. Random grayscale augmentation is applied to visible light images. During each training epoch, DBSCAN is used to cluster images within each modality. The maximum distance is set to 0.5 for the SYSU-MM01 dataset and 0.25 for the RegDB dataset. The minimum cluster size for both datasets is set to 4. During clustering, the memory update rate λ is set to 0.05, the temperature factor
During the experimental phase, we use standard evaluation metrics to assess the two datasets, including the Cumulative Match Characteristic (CMC) curve, Mean Inverse Negative Penalty (mINP), and Mean Average Precision (mAP) to measure the model’s recognition performance. The CMC curve reflects the classification accuracy of the model, typically represented as Rank-n for the top n matching results. mINP indicates the proportion of correct samples among all retrieved samples up to the last correct match. mAP is the mean accuracy of all returned results for a given category.
To find the optimal hyperparameters for the proposed method, we first conducted a parameter analysis experiment to examine the impact of the weighted combination of different loss functions on the model. As shown in Fig. 4. Our study aims to verify the impact of the proposed BR module on overall performance. This experiment was conducted in the global mode of the SYSU-MM01 dataset, testing the model across the parameter range {0, 0.2, 0.4, 0.6, 0.8, 1.0}. When the parameter is 0, the BR module is not used, resulting in poor model performance. The final experimental results, shown in Fig. 5, indicate that the proposed BR module effectively improves the model’s performance, with optimal results achieved at a specific parameter value.
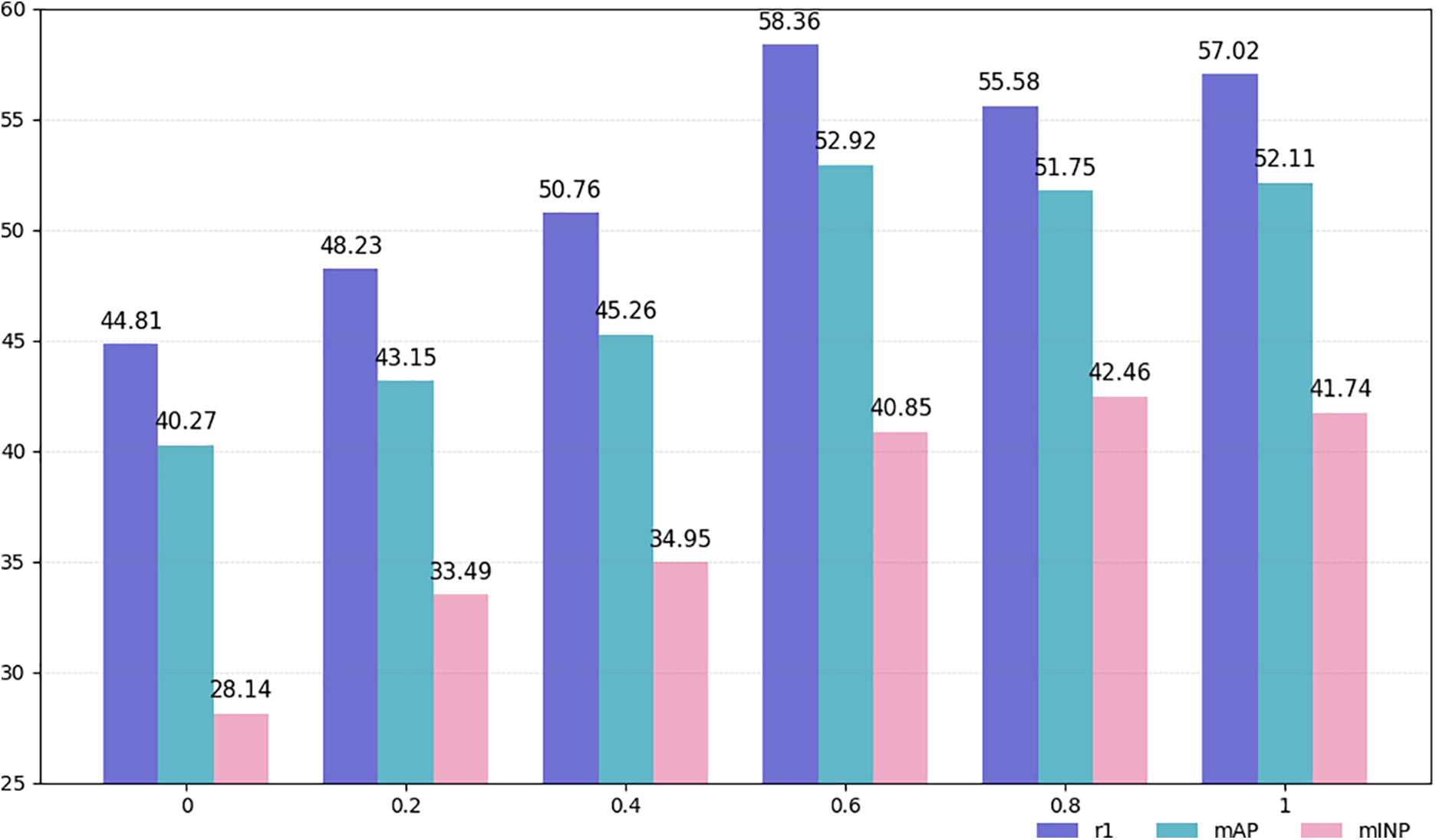
Figure 5: The impact of different λ values on the SYSU-MM01 dataset under the all-search mode
4.4 Comparison with State-of-the-Art Methods
Based on the optimal model derived in the previous section, we first evaluate the framework we proposed using the widely used SYSU-MM01 and RegDB datasets. The comparison methods are mainly divided into two categories: one for unsupervised cross-modal visible-infrared person re-identification methods; and another for unsupervised single-modality person re-identification methods. The comparison results are shown in Table 1.
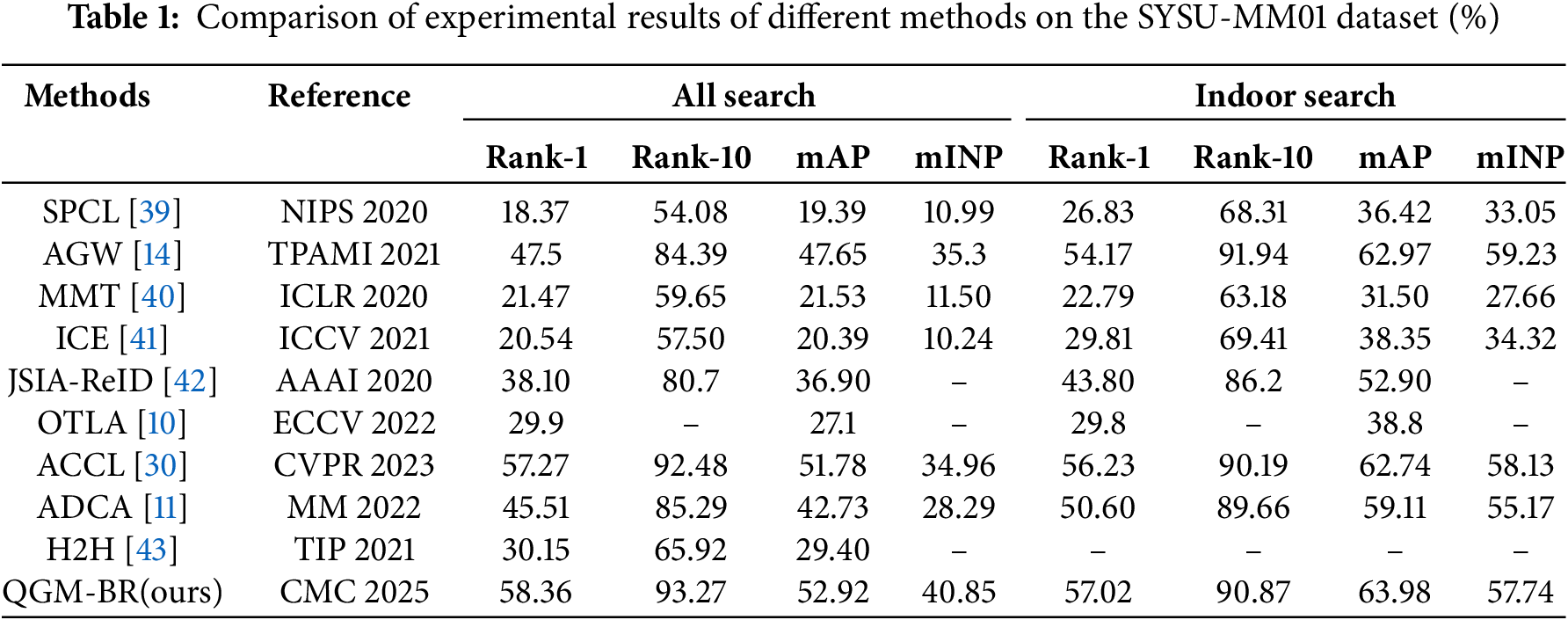
As shown in Table 1, in the experiments on the SYSU-MM01 dataset, the proposed framework outperforms the best models on all evaluation metrics in both the full retrieval mode and indoor retrieval mode. Specifi-cally, in full retrieval mode, the model achieves a mAP of 52.92%, improving by 1.14% compared to the best model ACCL, and a Rank-1 accuracy of 58.36%, which is 1.09% higher than ACCL. In indoor retrieval mode, the mAP reaches 63.98%, an improvement of 1.01% over the best model AGW, and the Rank-1 accuracy is 57.02%, 0.79% higher than ACCL.
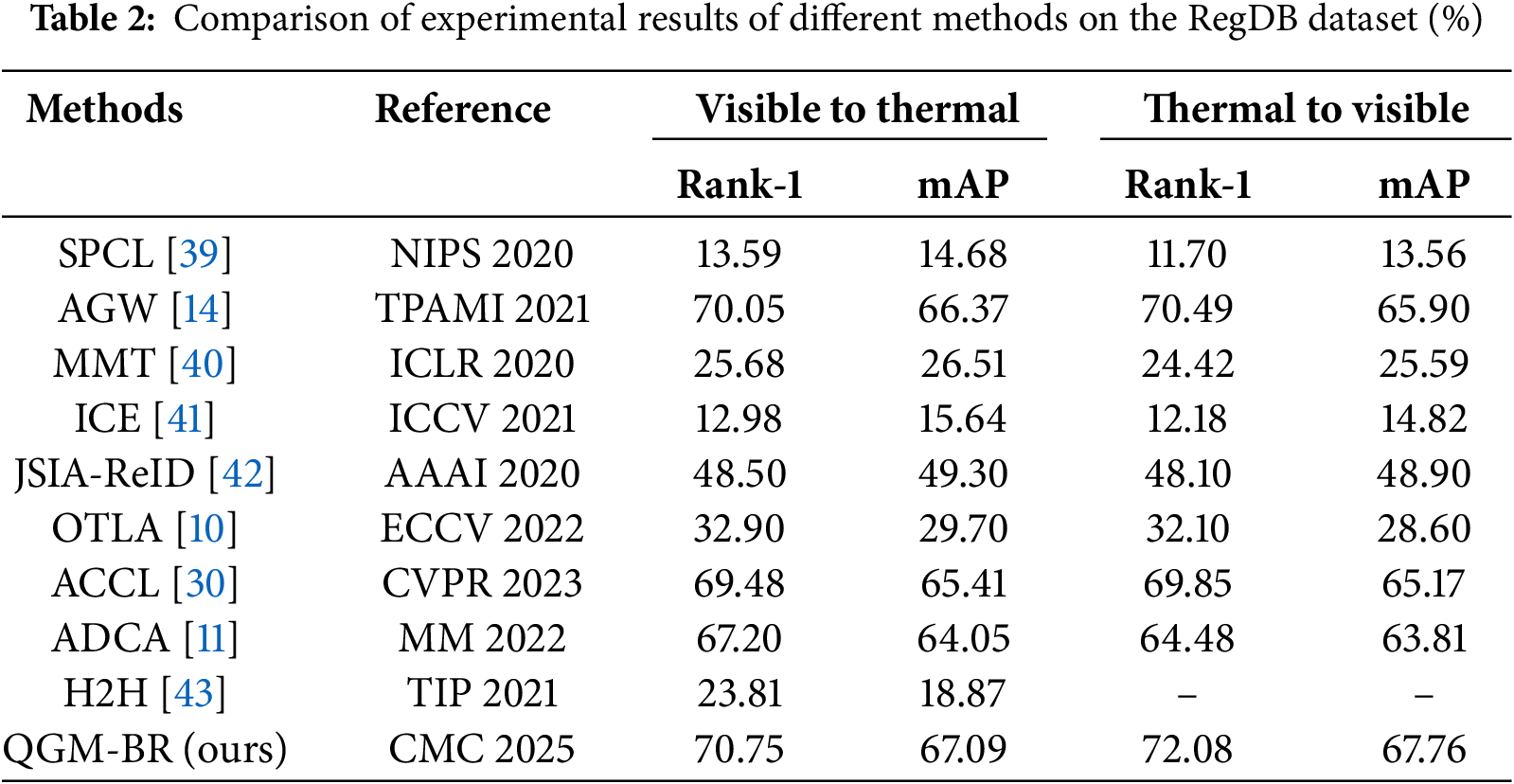
As shown in Table 2, in the experiments on the RegDB dataset, the proposed framework outperforms the best models in both test modes. In the Visible to Thermal mode, the mAP improves by 0.72%, and Rank-1 accuracy increases by 0.7% compared to the best model. In the Thermal to Visible mode, the mAP improves by 1.86%, and Rank-1 accuracy increases by 1.59%.
In order to validate the model’s excellent performance across diverse datasets, in addition to conducting experiments on the commonly used SYSU-MM01 and RegDB datasets, we also performed experiments on the newly released RGBNT201 dataset, with the results shown in Table 3. Since this dataset is newly introduced and unprocessed, it is not directly applicable to visible-infrared person re-identification, and therefore, there are few research papers reporting results on it. We selected several methods that have shown strong performance in this context as competitors on this dataset.
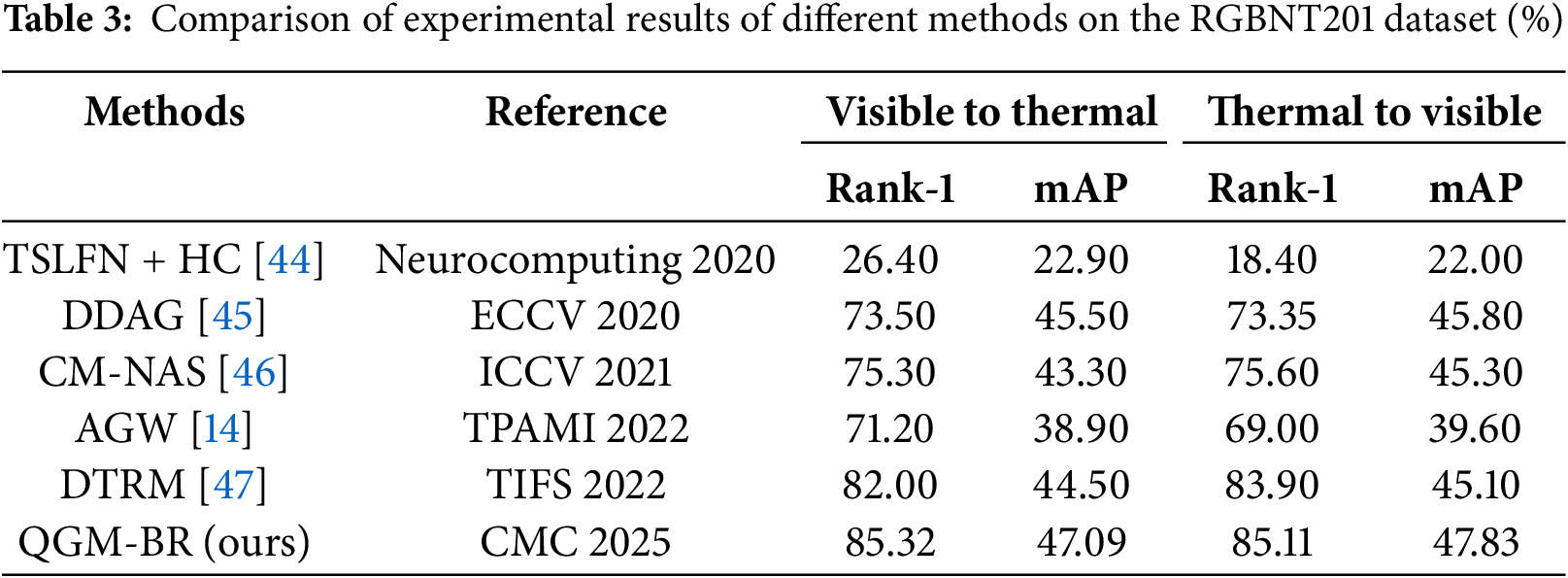
As shown in Table 3, in the experiments on the RGBNT201 dataset, the proposed framework outperformed the best model in both testing modes. In the Visible to Thermal mode, compared to the best model, the mAP improved by 3.32%, and the Rank-1 accuracy increased by 1.59%. In the Thermal to Visible mode, the mAP improved by 1.21%, and the Rank-1 accuracy increased by 2.03%. Overall, the proposed framework demonstrates high competitiveness across all three datasets.
This section presents an ablation study to validate the effectiveness of each component of the proposed method. We use the DCL module described in Section 3.1 as the baseline and evaluate the performance after adding the QGM module and the BR module, as well as the effect of the contrastive loss function.
The experimental results are shown in Table 4. The addition of any single module among the QGM module, BR module, and contrastive loss function significantly improves the model’s performance. Pairwise combinations of these three components also lead to notable performance improvements. When all three components are integrated together, they complement each other, achieving the best performance. Overall, each component positively contributes to the model’s recognition performance, and their combined usage yields outstanding results. As shown in Fig. 6, we can also observe that the QGM and BR modules mutually complement each other, resulting in optimal performance. Notably, when the BR module operates independently without the QGM module, it treats each data point as an individual block due to the absence of QGM’s matching results.
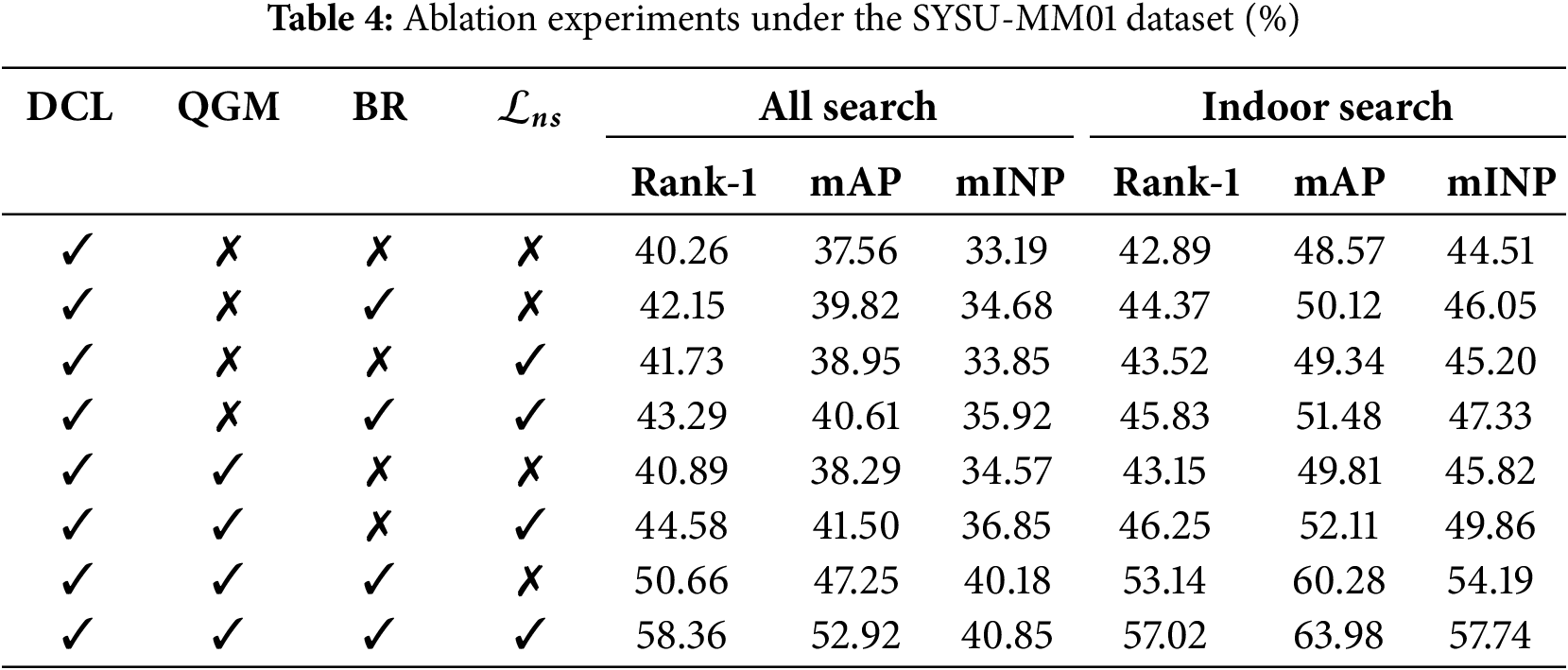
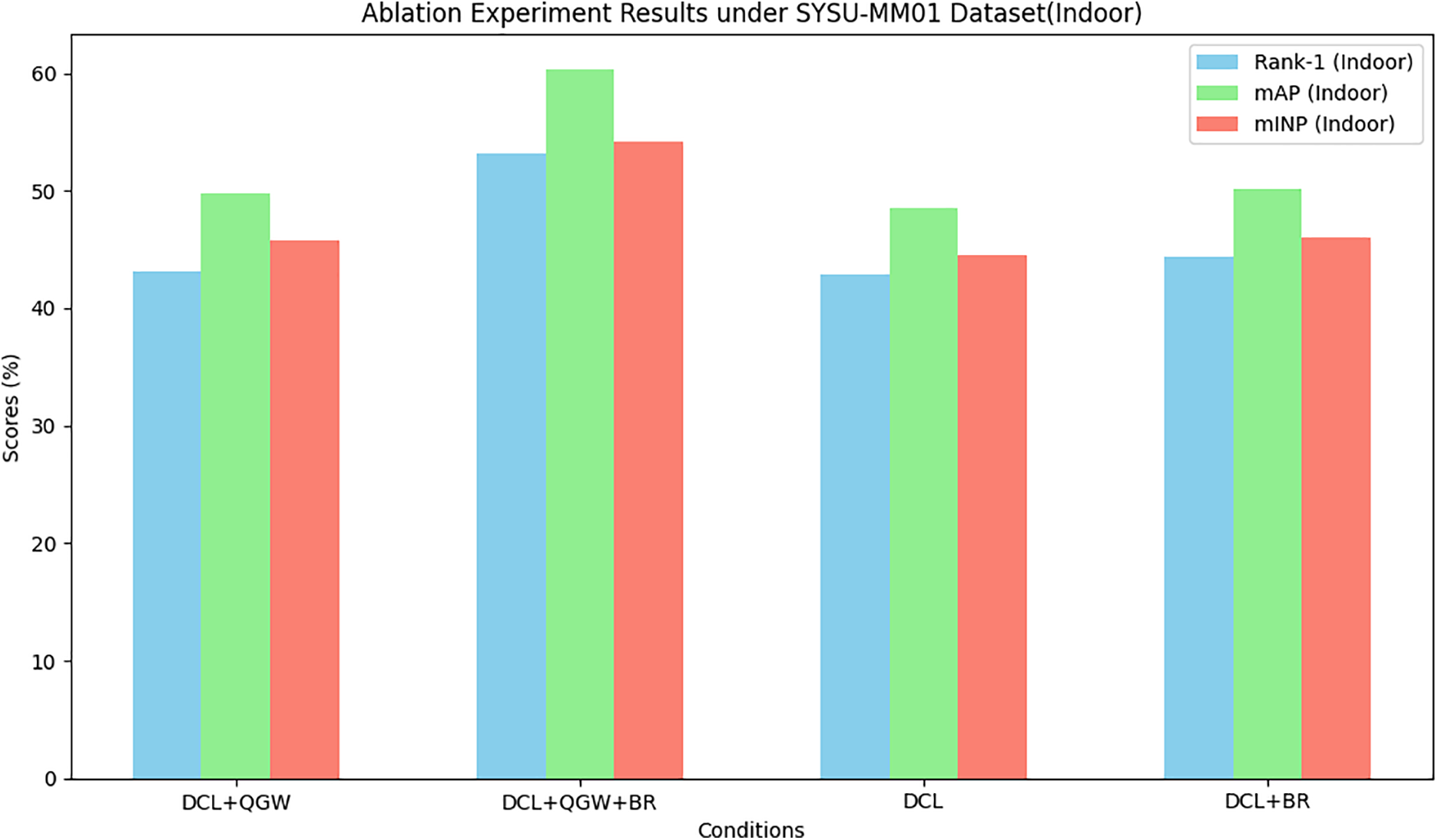
Figure 6: From the ablation experiment results under the perspective of the QGM and BR modules
We propose a framework based on Quadratic Graph Matching (QGM) and Block Reasoning (BR) to achieve reliable modality correspondence and efficient image updates. First, we transform the modality correspondence problem into a graph matching problem and use a quadratic matching strategy to effectively address the cluster imbalance issue. Additionally, we introduce the Block Reasoning module, which utilizes the affinity information between classes to enhance the precision of person search while simplifying the gallery update process. Extensive experiments demonstrate that the proposed method achieves state-of-the-art performance across multiple datasets. However, the affinity reasoning module is currently only applied during the testing phase, and the affinity information in the training phase has yet to be fully exploited. Future work will focus on integrating the affinity information with graph matching in the training phase for better performance.
Acknowledgement: The authors are grateful to all the editors and anonymous reviewers for their comments and suggestions, and thank all the members who have contributed to this work.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Junfeng Lin and Jialin Ma; data collection: Junfeng Lin and Hao Wang; analysis an interpretation of results: Weiguo Ding and Wei Chen; draft manuscript preparation: Mingyao Tang and Wei Chen. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The original contributions presented in the study are included in the article. Further inquiries can be directed to the corresponding author.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Jin X, Lan C, Zeng W, Chen Z, Zhang L. Style normalization and restitution for generalizable person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2020 Jun 13–19; Seattle, WA, USA. p. 3140–9. doi:10.1109/cvpr42600.2020.00321. [Google Scholar] [CrossRef]
2. Kalayeh MM, Basaran E, Gökmen M, Kamasak ME, Shah M. Human semantic parsing for person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2018 Jun 18–23; Salt Lake City, UT, USA. p. 1062–71. doi:10.1109/CVPR.2018.00117. [Google Scholar] [CrossRef]
3. Chen C, Ye M, Jiang D. Towards modality-agnostic person re-identification with descriptive query. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2023 Jun 17–24; Vancouver, BC, Canada. p. 15128–37. doi:10.1109/CVPR52729.2023.01452. [Google Scholar] [CrossRef]
4. Kim M, Kim S, Park J, Park S, Sohn K. PartMix: regularization strategy to learn part discovery for visible-infrared person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2023 Jun 17–24; Vancouver, BC, Canada. p. 18621–32. doi:10.1109/CVPR52729.2023.01786. [Google Scholar] [CrossRef]
5. Feng J, Wu A, Zheng WS. Shape-erased feature learning for visible-infrared person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2023 Jun 17–24; Vancouver, BC, Canada. p. 22752–61. doi:10.1109/CVPR52729.2023.02179. [Google Scholar] [CrossRef]
6. Chen Y, Wan L, Li Z, Jing Q, Sun Z. Neural feature search for RGB-infrared person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2021 Jun 20–25; Nashville, TN, USA. p. 587–97. doi:10.1109/cvpr46437.2021.00065. [Google Scholar] [CrossRef]
7. Wu Q, Dai P, Chen J, Lin CW, Wu Y, Huang F, et al. Discover cross-modality nuances for visible-infrared person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2021 Jun 20–25; Nashville, TN, USA. p. 4328–37. doi:10.1109/cvpr46437.2021.00431. [Google Scholar] [CrossRef]
8. Lu Y, Wu Y, Liu B, Zhang T, Li B, Chu Q, et al. Cross-modality person re-identification with shared-specific feature transfer. In: 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2020 Jun 13–19; Seattle, WA, USA. p. 13376–86. doi:10.1109/cvpr42600.2020.01339. [Google Scholar] [CrossRef]
9. Zheng Z, Wang X, Zheng N, Yang Y. Parameter-efficient person re-identification in the 3D space. IEEE Trans Neural Netw Learn Syst. 2024;35(6):7534–47. doi:10.1109/tnnls.2022.3214834. [Google Scholar] [PubMed] [CrossRef]
10. Wang J, Zhang Z, Chen M, et al. Optimal transport for label-efficient visible-infrared person re-identification. In: European Conference on Computer Vision; 2022; Tel Aviv, Israel. p. 93–109. [Google Scholar]
11. Yang B, Ye M, Chen J, Wu Z. Augmented dual-contrastive aggregation learning for unsupervised visible-infrared person re-identification. In: Proceedings of the 30th ACM International Conference on Multimedia; 2022; Lisboa, Portugal. p. 2843–51. doi:10.1145/3503161.3548198. [Google Scholar] [CrossRef]
12. Huang H, Huang Y, Wang L. VI-diff: unpaired visible-infrared translation diffusion model for single modality labeled visible-infrared person re-identification. arXiv:2310.04122. 2023. [Google Scholar]
13. Cheng D, Huang X, Wang N, He L, Li Z, Gao X. Unsupervised visible-infrared person ReID by collaborative learning with neighbor-guided label refinement. In: Proceedings of the 31st ACM International Conference on Multimedia; 2023; Ottawa ON, Canada. p. 7085–93. doi:10.1145/3581783.3612077. [Google Scholar] [CrossRef]
14. Ye M, Shen J, Lin G, Xiang T, Shao L, Hoi SCH. Deep learning for person re-identification: a survey and outlook. IEEE Trans Pattern Anal Mach Intell. 2022;44(6):2872–93. doi:10.1109/TPAMI.2021.3054775. [Google Scholar] [PubMed] [CrossRef]
15. Huang X, Liu MY, Belongie S, Kautz J. Multimodal unsupervised image-to-image translation. In: Computer Vision—ECCV 2018; 2018; Munich, Germany. p. 179–96. doi:10.1007/978-3-030-01219-9_11. [Google Scholar] [CrossRef]
16. Bai S, Ma B, Chang H, Huang R, Chen X. Salient-to-broad transition for video person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2022 Jun 18–24; New Orleans, LA, USA. p. 7329–38. doi:10.1109/CVPR52688.2022.00719. [Google Scholar] [CrossRef]
17. He W, Deng Y, Tang S, Chen Q, Xie Q, Wang Y, et al. Instruct-ReID: a multi-purpose person re-identification task with instructions. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2024 Jun 16–22; Seattle, WA, USA. p. 17521–31. doi:10.1109/CVPR52733.2024.01659. [Google Scholar] [CrossRef]
18. Li X, Xu Q, Zhang J, Zhang T, Yu Q, Sheng L, et al. Multi-modality affinity inference for weakly supervised 3D semantic segmentation. Proc AAAI Conf Artif Intell. 2024;38(4):3216–24. doi:10.1609/aaai.v38i4.28106. [Google Scholar] [CrossRef]
19. Yao J, Anthony Q, Shafi A, Subramoni H, Panda DK, et al. Exploiting inter-layer expert affinity for accelerating mixture-of-experts model inference. In: 2024 IEEE International Parallel and Distributed Processing Symposium (IPDPS); 2024 May 27–31; San Francisco, CA, USA. p. 915–25. doi:10.1109/IPDPS57955.2024.00086. [Google Scholar] [CrossRef]
20. Wang Z, Zhu F, Tang S, Zhao R, He L, Song J. Feature erasing and diffusion network for occluded person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2022 Jun 18–24; New Orleans, LA, USA. p. 4744–53. doi:10.1109/CVPR52688.2022.00471. [Google Scholar] [CrossRef]
21. Dai P, Ji R, Wang H, Wu Q, Huang Y. Cross-modality person re-identification with generative adversarial training. In: Proceedings of the 27th International Joint Conference on Artificial Intelligence (IJCAI–18); 2018; Stockholm, Sweden. p. 677–83. [Google Scholar]
22. Yu X, Dong N, Zhu L, Peng H, Tao D. CLIP-driven semantic discovery network for visible-infrared person re-identification. IEEE Trans Multimed. 2025;1–13. doi:10.1109/TMM.2025.3535353. [Google Scholar] [CrossRef]
23. Li H, Liu M, Hu Z, Nie F, Yu Z. Intermediary-guided bidirectional spatial-temporal aggregation network for video-based visible-infrared person re-identification. IEEE Trans Circuits Syst Video Technol. 2023;33(9):4962–72. doi:10.1109/TCSVT.2023.3246091. [Google Scholar] [CrossRef]
24. Yao M, Wang H, Chen Y, Fu X. Between/within view information completing for tensorial incomplete multi-view clustering. IEEE Trans Multimed. 2024;27:1538–50. doi:10.1109/TMM.2024.3521771. [Google Scholar] [CrossRef]
25. Wang H, Yao M, Chen Y, Xu Y, Liu H, Jia W, et al. Manifold-based incomplete multi-view clustering via bi-consistency guidance. IEEE Trans Multimed. 2024;26:10001–14. doi:10.1109/TMM.2024.3405650. [Google Scholar] [CrossRef]
26. Xu Y, Lin L, Zheng WS, Liu X. Human re-identification by matching compositional template with cluster sampling. In: IEEE International Conference on Computer Vision; 2013 Dec 1–8; Sydney, NSW, Australia. p. 3152–9. doi:10.1109/ICCV.2013.391. [Google Scholar] [CrossRef]
27. Zhang Z, Saligrama V. PRISM: person reidentification via structured matching. IEEE Trans Circuits Syst Video Technol. 2017;27(3):499–512. doi:10.1109/TCSVT.2016.2596159. [Google Scholar] [CrossRef]
28. Rezatofighi SH, Milani A, Zhang Z, Shi Q, Dick A, Reid I. Joint probabilistic matching using m-best solutions. In: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); 2016 Jun 27–30; Las Vegas, NV, USA. p. 136–45. doi:10.1109/CVPR.2016.22. [Google Scholar] [CrossRef]
29. Ye M, Ma AJ, Zheng L, Li J, Yuen PC. Dynamic label graph matching for unsupervised video re-identification. In: IEEE International Conference on Computer Vision (ICCV); 2017 Oct 22–29; Venice, Italy. p. 5152–60. doi:10.1109/ICCV.2017.550. [Google Scholar] [CrossRef]
30. Wu Z, Ye M. Unsupervised visible-infrared person re-identification via progressive graph matching and alternate learning. In: 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2023 Jun 17–24; Vancouver, BC, Canada. p. 9548–58. doi:10.1109/CVPR52729.2023.00921. [Google Scholar] [CrossRef]
31. Huang Z, Liu J, Li L, Zheng K, Zha ZJ. Modality-adaptive mixup and invariant decomposition for RGB-infrared person re-identification. Proc AAAI Conf Artif Intell. 2022;36(1):1034–42. doi:10.1609/aaai.v36i1.19987. [Google Scholar] [CrossRef]
32. Liu J, Sun Y, Zhu F, Pei H, Yang Y, Li W. Learning memory-augmented unidirectional metrics for cross-modality person re-identification. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2022 Jun 18–24; New Orleans, LA, USA. p. 19344–53. doi:10.1109/CVPR52688.2022.01876. [Google Scholar] [CrossRef]
33. Jia M, Zhai Y, Lu S, Ma S, Zhang J. A similarity inference metric for RGB-infrared cross-modality person re-identification. arXiv:2007.01504. 2020. [Google Scholar]
34. Fang X, Yang Y, Fu Y. Visible-infrared person re-identification via semantic alignment and affinity inference. In: IEEE/CVF International Conference on Computer Vision (ICCV); 2023 Oct 1–6; Paris, France. p. 11270–9. doi:10.1109/ICCV51070.2023.01035. [Google Scholar] [CrossRef]
35. Wu A, Zheng WS, Yu HX, Gong S, Lai J. RGB-infrared cross-modality person re-identification. In: IEEE International Conference on Computer Vision (ICCV); 2017; Venice, Italy. p. 5390–9. doi:10.1109/ICCV.2017.575. [Google Scholar] [CrossRef]
36. Nguyen DT, Hong HG, Kim KW, Park KR. Person recognition system based on a combination of body images from visible light and thermal cameras. Sensors. 2017;17(3):605. doi:10.3390/s17030605. [Google Scholar] [PubMed] [CrossRef]
37. Zheng A, Wang Z, Chen Z, Li C, Tang J. Robust multi-modality person re-identification. Proc AAAI Conf Artif Intell. 2021;35(4):3529–37. doi:10.1609/aaai.v35i4.16467. [Google Scholar] [CrossRef]
38. He K, Zhang X, Ren S, Sun J. Deep residual learning for image recognition. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR); 2016 Jun 27–30; Las Vegas, NV, USA. p. 770–8. doi:10.1109/CVPR.2016.90. [Google Scholar] [CrossRef]
39. Ge Y, Zhu F, Chen D, Zhao R, Li H. Self-paced contrastive learning with hybrid memory for domain adaptive object re-id. Adv Neural Inf Process Syst. 2020;33:11309–21. [Google Scholar]
40. Ge Y, Chen D, Li H. Mutual mean-teaching: pseudo label refinery for unsupervised domain adaptation on person re-identification. arXiv:2001.01526. 2020. [Google Scholar]
41. Chen H, Lagadec B, Bremond F. ICE: inter-instance contrastive encoding for unsupervised person re-identification. In: IEEE/CVF International Conference on Computer Vision (ICCV); 2021 Oct 10–17; Montreal, QC, Canada. p. 14940–9. doi:10.1109/ICCV48922.2021.01469. [Google Scholar] [CrossRef]
42. Wang GA, Zhang T, Yang Y, Cheng J, Chang J, Liang X, et al. Cross-modality paired-images generation for RGB-infrared person re-identification. Proc AAAI Conf Artif Intell. 2020;34(7):12144–51. doi:10.1609/aaai.v34i07.6894. [Google Scholar] [CrossRef]
43. Liang W, Wang G, Lai J, Xie X. Homogeneous-to-heterogeneous: Unsupervised learning for RGB-infrared person re-identification. IEEE Trans Image Process. 2021;30:6392–407. doi:10.1109/TIP.2021.3092578. [Google Scholar] [PubMed] [CrossRef]
44. Zhu Y, Yang Z, Wang L, Zhao S, Hu X, Tao D. Hetero-center loss for cross-modality person re-identification. Neurocomputing. 2020;386:97–109. doi:10.1016/j.neucom.2019.12.100. [Google Scholar] [CrossRef]
45. Ye M, Shen J, Crandall J, Shao D, Luo L, J et al. Dynamic dual-attentive aggregation learning for visible-infrared person re-identification. In: Computer Vision-ECCV 2020: 16th European Conference; 2020 Aug 23–28; Glasgow, UK. p. 229–47. [Google Scholar]
46. Fu C, Hu Y, Wu X, Shi H, Mei T, He R. CM-NAS: cross-modality neural architecture search for visible-infrared person re-identification. In: IEEE/CVF International Conference on Computer Vision (ICCV); 2021 Oct 10–17; Montreal, QC, Canada. p. 11803–12. doi:10.1109/ICCV48922.2021.01161. [Google Scholar] [CrossRef]
47. Ye M, Chen C, Shen J, Shao L. Dynamic tri-level relation mining with attentive graph for visible infrared re-identification. IEEE Trans Inf Forensics Secur. 2021;17:386–98. doi:10.1109/TIFS.2021.3139224. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools