
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
URLLC Service in UAV Rate-Splitting Multiple Access: Adapting Deep Learning Techniques for Wireless Network
1 Department of Information Technology, College of Computer and Information Sciences, Princess Nourah bint Abdulrahman University, Riyadh, 11671, Saudi Arabia
2 Interdisciplinary Centre for Security, Reliability and Trust (SnT), University of Luxembourg, Luxembourg City, 1855, Luxembourg
3 China-Korea Belt and Road Joint Laboratory on Industrial Internet of Things, Key Laboratory of Industrial Internet of Things and Networked Control, Ministry of Education, Chongqing University of Posts and Telecommunications, Chongqing, 400065, China
4 Department of Applied Probability and Informatics, Peoples’ Friendship University of Russia (RUDN University), Moscow, 117198, Russia
* Corresponding Author: Dina S. M. Hassan. Email:
# These authors contributed equally to this work
Computers, Materials & Continua 2025, 84(1), 607-624. https://doi.org/10.32604/cmc.2025.063206
Received 08 January 2025; Accepted 27 April 2025; Issue published 09 June 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The 3GPP standard defines the requirements for next-generation wireless networks, with particular attention to Ultra-Reliable Low-Latency Communications (URLLC), critical for applications such as Unmanned Aerial Vehicles (UAVs). In this context, Non-Orthogonal Multiple Access (NOMA) has emerged as a promising technique to improve spectrum efficiency and user fairness by allowing multiple users to share the same frequency resources. However, optimizing key parameters–such as beamforming, rate allocation, and UAV trajectory–presents significant challenges due to the nonconvex nature of the problem, especially under stringent URLLC constraints. This paper proposes an advanced deep learning-driven approach to address the resulting complex optimization challenges. We formulate a downlink multiuser UAV, Rate-Splitting Multiple Access (RSMA), and Multiple Input Multiple Output (MIMO) system aimed at maximizing the achievable rate under stringent constraints, including URLLC quality-of-service (QoS), power budgets, rate allocations, and UAV trajectory limitations. Due to the highly nonconvex nature of the optimization problem, we introduce a novel distributed deep reinforcement learning (DRL) framework based on dual-agent deep deterministic policy gradient (DA-DDPG). The proposed framework leverages inception-inspired and deep unfolding architectures to improve feature extraction and convergence in beamforming and rate allocation. For UAV trajectory optimization, we design a dedicated actor-critic agent using a fully connected deep neural network (DNN), further enhanced through incremental learning. Simulation results validate the effectiveness of our approach, demonstrating significant performance gains over existing methods and confirming its potential for real-time URLLC in next-generation UAV communication networks.Keywords
As 5G has inspired widespread research efforts, ultra-reliable and low-latency communications (URLLC) will be crucial in driving the future of wireless industrial automation and are designed to support critical applications that require highly reliable communication [1,2]. By the 3rd Generation Partnership Project (3GPP) standard, the implementation of URLLC needs to ensure that data packets are delivered in a few milliseconds with the target reliability of 99.999% or higher [3]. However, this result can be obtained through a combination of advanced network technologies like non-orthogonal multiple access (NOMA). When NOMA is applied, data is decoded sequentially based on its power levels. This approach facilitates improved interference management and ensures that users with high reliability demands receive more consistent and reliable data [4]. Moreover, NOMA-based beamforming can meet the specific needs of URLLC communications by adapting networks to constantly changing conditions and varied application requirements [5,6]. Although NOMA has several benefits for URLLC communications, it comes up against problems of great complexity and unsatisfactory effect when multiple antennas are introduced for transmission [7]. Consequently, Rate-Splitting Multiple Access (RSMA) [8–10] has recently been suggested as an appropriate approach to achieve a more general and robust transmission framework than NOMA Systems [11–13], particularly in environments where users have different expectations when it comes to transmission rates. The main idea is to split user messages into two parts, a common part and a private part. Thus, the common parts and the private parts are encoded separately in a common data stream and private data streams, respectively [9]. Noting that interference generated by other users is partially decoded and treated as noise [14]. During reception, the signals are successively decoded. First, the user subtracts the common data stream and decodes their own private data stream, followed by the decoding of their own private data stream [15]. Applied in this context, RSMA could offer great spectral efficiency and reduce interference between users. RSMA flexibility can better control the problems inherent in NOMA by adapting the undercoats to suit channel conditions and user requirements. In the URLLC, the time and reliability requirements can hardly be met by a single communication link [16]. To overcome this challenge, a new support system architecture should be designed.
Joint optimization of beamforming vectors, rate allocation, and UAV trajectory under URLLC constraints forms a highly non-convex problem that cannot be solved efficiently using conventional optimization techniques [17]. Existing approaches typically address these components separately, leading to suboptimal solutions that fail to meet URLLC’s real-time processing requirements. For instance, the alternating optimization method proposed in [18] requires iterative updates that introduce unacceptable latency (
1.1 Motivations and Contributions
Motivated by recent advancements and the need for real-time URLLC services in multiuser UAV-aided RSMA networks, this paper leverages state-of-the-art deep learning methodologies to address the inherent complexities and optimization challenges. Our contributions are detailed as follows.
• First, we investigate a downlink multiuser UAV RSMA MIMO network targeting the maximization of the achievable rate, subject to stringent URLLC quality-of-service (QoS), power budget constraints, rate allocation, and UAV trajectory limitations. The resulting problem formulation leads to a nonconvex optimization challenge that is difficult to solve directly within the latency constraints characteristic of next-generation networks.
• To effectively address the intractability of jointly optimizing beamforming vectors, rate allocations, and UAV trajectory parameters, we propose a novel distributed deep reinforcement learning (DRL) framework utilizing dual-agent deep deterministic policy gradient (DA-DDPG). This framework introduces a sophisticated neural network architecture for beamforming and rate allocation. Specifically, we integrate inception-like and deep unfolding mechanisms to construct the network layers, allowing multi-scale feature extraction and accelerated convergence.
• To apply the above mechanisms, we develop a successive pseudo-convex approximation (SPCA) and numerical solutions for rate allocation and the beamforming subproblem. To the best of our knowledge, this work represents the first attempt at incorporating these recent deep learning advances into solving complex optimization problems in wireless communications. Additionally, a fully connected deep neural network (DNN) is employed for the critic network.
• Regarding UAV trajectory optimization, we utilize a fully connected DNN to build the corresponding actor-critic-based agent, ensuring efficient learning and robust decision-making.
• We also apply an incremental learning training procedure [1] to improve model accuracy, reduce the complexity of the deep unfolding-based model, and significantly lower the volume of required training sequences.
• Simulation experiments conducted validate the efficacy of the proposed DA-DDPG framework. Numerical results illustrate that our proposed method consistently outperforms existing state-of-the-art techniques, underscoring its suitability and effectiveness for real-time URLLC-enabled UAV communications.
Over the past few years, the research community has made significant efforts to investigate the complex and new challenges of URLLC-UAV communication based on the NOMA or the RSMA approaches [22–24]. Notably, the study in [22] proposed a model to deploy UAVs as relays between the base station and remote devices. The aim was to overcome the poor connectivity due to the presence of obstacles. In the proposed model, the authors targeted the maximization of the transmission rate on the backward link while satisfying the requirement of URLLC on the forward link. More recently, the authors in [23] considered the joint optimization problem for UAV-enabled URLLC-based mobile edge computing, which is divided into three subproblems. The first two subproblems optimize the UAV’s horizontal and vertical locations, while the third one optimizes the offloading bandwidths and processing frequencies. Within this framework, they minimized the system’s computation latency under an overall resource constraint.
In [24], a global iterative algorithm based on the alternating direction method of multipliers and random perturbation was proposed to minimize total error probability and jointly optimize blocklength allocation and UAV deployment. These contributions have made significant efforts in the field of URLLC-assisted UAV communication. However, the studies referred to above were carried out in the NOMA scenario, and the RSMA has received relatively little attention in the context of URLLC-assisted UAV networks. NOMA uses successive interference cancellation (SIC), which increases the complexity of processing in UAVs. This additional complexity can result in delays, causing problems in URLLC scenarios where extremely low latency is essential. In the current technical literature, only a few studies have explored RSMA-based URLLC-assisted wireless networks, as evidenced by [25]. In [25], RSMA was introduced to achieve energy-efficient (EE) URLLC in cell-free massive MIMO systems. In particular, the power allocation problem was formulated to enhance the EE.
Huang et al. introduced an artificial intelligence named RSMA-Deep Reinforcement Learning (DRL)-based approach. The authors demonstrated that, compared to the space-division multiple access (SDMA)-DRL protocol, the proposed method can achieve higher energy efficiency. Similarly, to maximize transmission power at every moment under energy harvesting, the authors in [26] presented a DRL method called the soft actor-critic algorithm. In particular, they used the Han–Powell quasi-Newton approach in sequential least squares programming (SLSQP) to optimize the sum-rate for the specified transmission power through DRL. The work in [27] presents a framework that integrates the Reconfigurable Intelligent Surface (RIS) with an intelligent satellite UAV-terrestrial network. The multiple access technique used in the communication architecture was NOMA. The authors formulated a multi-objective optimization problem that optimizes UAV trajectory, RIS phase shift, and transmit beamforming while minimizing UAV energy consumption and maximizing the sum rate. To solve the optimization problem, the multi-objective deep deterministic policy gradient (MO-DDPG) technique was suggested. In simulations, better data rates, energy consumption, and throughput were achieved when compared to systems without integrated RIS or random phase shift systems. The authors in [28] proposed a deep learning (DL)-based RSMA system for RIS-assisted terahertz massive multiple-input multiple-output (MIMO) systems. They presented a low-complexity approximate weighted minimum mean square error (AWMMSE) digital precoding scheme. Then, by combining AWMMSE with deep learning (DL), the deep unfolding [29] active precoding network (DFAPN) scheme was performed at the Base Station (BS), while passive precoding was performed using a transformer-based data-driven RIS reflecting network (RRN) at the RIS. Results showed that channel state information has a better achievable rate for the worst user device when compared to corresponding SDMA-based systems. Authors in [30] introduced the deep deterministic policy gradient (DDPG) approach to maximize the sum rate in downlink UAV-aided RSMA systems, where the trajectory and UAV beamforming matrix are jointly optimized. In this context, the UAV’s uniform rectangular array (URA) beamforming design and mobility functions are considered. Unfortunately, there is currently a lack of research on the combination of URLLC and RSMA in a wireless UAV network. Hence, it is a mathematically challenging task to study the downlink achievable rate in UAV communication based on URLLC-RSMA.
3 System Model and Problem Formulation
In this work, a downlink multiuser UAV RSMA-URLLC system is considered, as depicted in Fig. 1, where the UAV is equipped with M antennas and serving N single-antenna users via short-packet communication (SPC), where the latency is always considered less than 1 ms, which indicates that the channel conditions can be viewed as quasi-static since this latency is shorter than the channel coherence time. The flying period of the UAV is divided into T time slots, with
where
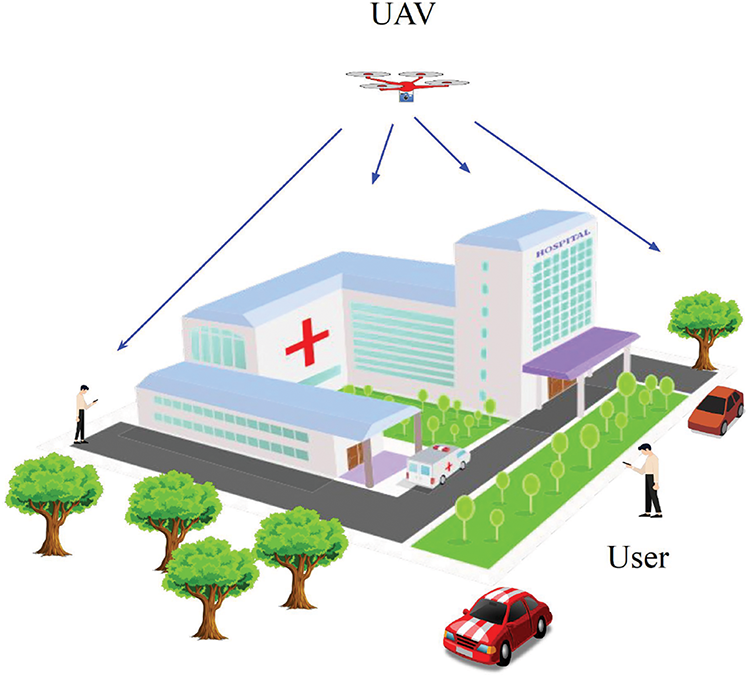
Figure 1: Multiuser RSMA-URLLC UAV network
Since RSMA is employed, the transmitted message from the UAV to the user
where
where
Similarly, the SINR of the user
To formulate the quality-of-service (QoS) constraints of URLLC, we follow the derivation in Eq. (5), where the approximate maximum achievable rate of the user
where
To guarantee the decoding of the common message by the user
Similarly, the achievable data rate of the user
The achievable rate of the user
Aiming at maximizing the total achievable rate of the system, we formulate our optimization problem as follows:
where
Problem (10) is nonconvex due to the nonconvexity of the objective function and the tight coupling of
In the following sections, we provide a novel deep reinforcement framework to handle the problem in (10). The proposed framework combines inception-like mechanisms, deep unfolding, and dual-agent DRL within the context of URLLC and RSMA-assisted UAV networks. It offers a practical and scalable DRL framework tailored specifically for real-time wireless optimization scenarios involving multiple antennas and stringent QoS demands.
4 Deep Unfolding-Based Inception-like Model
The proposed model architecture incorporates an inception-like block, where the inception mechanism is employed to enhance the design of the beamforming and rate allocation actor. The inception mechanism, inspired by convolutional neural networks, allows the model to process different features at multiple scales by applying several operations (e.g., different filter sizes or layers) in parallel. This increases the flexibility and expressiveness of the model, allowing it to better capture the diverse patterns and correlations between beamforming and rate allocation decisions. Additionally, the concept of deep unfolding is integrated into the actor’s design [31,32]. Deep unfolding involves converting iterative optimization algorithms into neural networks by mapping each iteration to a neural network layer. This technique allows the model to mimic traditional optimization algorithms while leveraging the learning capability of deep neural networks. By using deep unfolding, the beamforming and rate allocation actor is able to emulate efficient optimization steps, improving both accuracy and convergence speed.
To build the proposed deep unfolding-based inception-like model, first, we solve the problem using a traditional optimization method, namely, successive pseudo-convex optimization for the beamforming and the interior point for the rate allocation. The beamforming and rate allocation subproblem is given as (we removed
The problem in (11) can be further decoupled into rate allocation and beamforming. The rate allocation subproblem is given as
Following the analysis in [2], constraint (11f) can be transformed into
where
where
The successive pseudo-convex approximation (SPCA) has emerged as a pivotal technique in wireless communications for transforming nonconvex optimization problems into tractable convex forms through iterative approximations [3,33]. This approach is particularly effective for beamforming design, where the core subproblem is formulated as
Problem (16) is nonconvex due to the nonconvexity of the objective function and constraint (16b). Using the conventional Software Communications Architecture (SCA), a surrogate function
1.
2.
3. The gradients of
4. The set V is nonempty for
5. The sequence
On the highlights of these technical conditions, the surrogate
Using the objective function, problem (16) can be rewritten as
where constraints (18a) and (18b) are transformations of constraint (16b). Applying Lagrange relaxation and Karush-Kuhn-Tucker (KKT) conditions, the beamforming can be expressed in the following closed-form expressions:
where
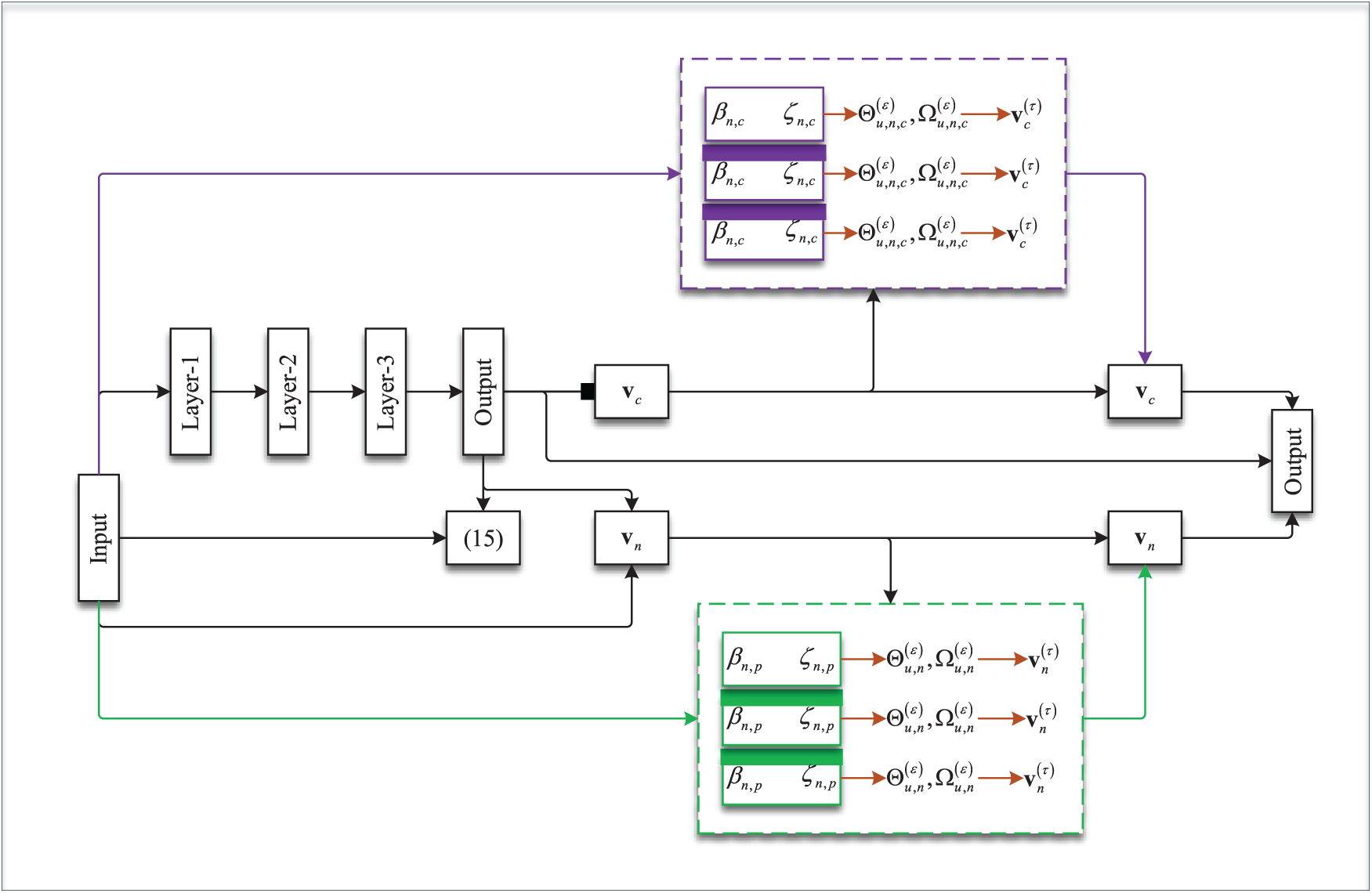
Figure 2: The structural design of a block of the proposed deep-unfolding-based neural network
The deep unfolding-based layer in 2 is built to resemble an inception block by accommodating neurons and layers in a mixed sequential and parallel structure to avoid the vanishing gradient problem. The block in 2 will be used in the actor network in the proposed DA-DDPG framework in Section 4.
5 Proposed Deep Unfolding-Based DDPG Framework
This section presents a novel design of a DRL framework using the dual-agent deep deterministic policy gradient (DA-DDPG) algorithm, and reformulates the problem as a Markov decision process (MDP). DA-DDPG is an extension of the standard DDPG method, which incorporates two agents working in parallel. One agent focuses on optimizing the continuous action space for beamforming and rate allocation, while the other agent handles the UAV trajectory optimization. By using dual agents, the framework can effectively decouple these two tasks, allowing for more specialized learning and faster convergence during training.
The traditional MDP consists of the following six-tuples:
where
The state-value function
And the Bellman expectation equation can be expressed
where
By interacting with the environment through behaviors, the agent in DRL learns the policy and modifies its behavior in response to rewards. The following provides a thorough explanation of the state space, action space, and reward:
1. State space
where
2. Action space
3. Reward: Following the structure of problem (10), the reward function should be built to maximize the total achievable rate for the given constraints. Therefore, penalties are set to force the satisfaction of the constraints while maximizing the objective function. Hence, the reward can be defined as follows:
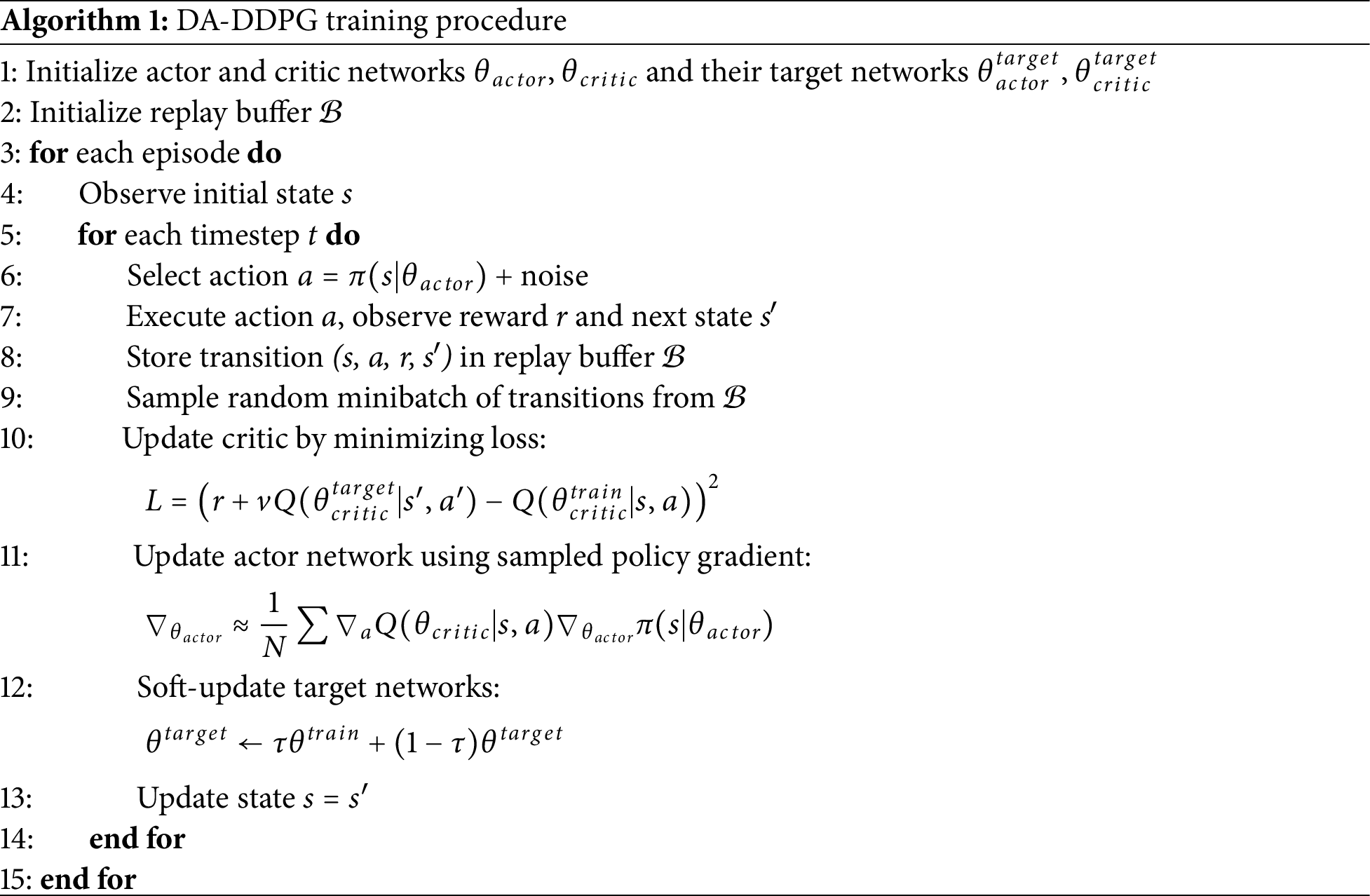
The DA-DDPG algorithm is a reinforcement learning framework tailored specifically for continuous optimization problems, incorporating two separate agents. The actor network creates actions depending on the current state of each agent’s actor-critic structure, and the critic network assesses these actions to guide policy improvements.
Specifically, each agent consists of two neural networks: a training network and a slowly updated target network. The target networks are periodically updated using parameters from the training networks, significantly contributing to stable and robust training by mitigating potential divergence issues common in reinforcement learning.
The critic network is responsible for estimating the expected cumulative reward (Q-value) associated with performing a specific action given a particular state. During training, the critic network parameters
where
The parameters of the target networks for both the actor and critic are updated through a soft update procedure to slowly track the training networks, helping stabilize the training process.
where
The overall structure of the proposed DRL framework is given as in Fig. 3a. The network consists of two agents, each agent has actor-critic structure for both training and target networks.
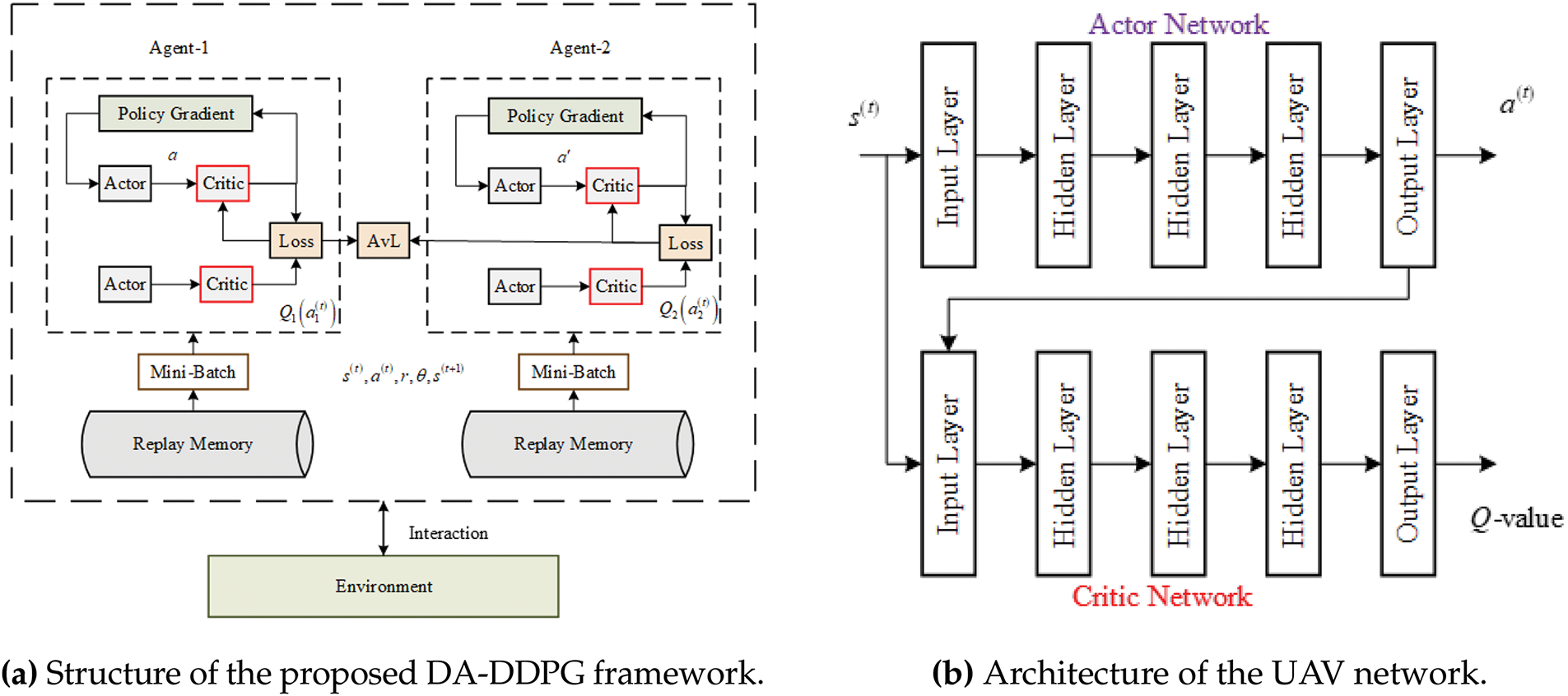
Figure 3: Architectural diagrams of the proposed system: (a) The DA-DDPG framework structure and (b) The UAV network architecture
The beamforming and rate allocation actor is constructed using an inception-like deep unfolding-based model from Section 4, while the critic is built using a fully connected deep neural network (DNN). On the other hand, a fully connected DNN-based actor-critic architecture is used to design the UAV trajectory network. The structure of the UAV trajectory is a DNN, as in Fig. 3b. In this architecture, the actor predicts the optimal UAV trajectory, while the critic evaluates the predicted trajectory by calculating the value function. The actor-critic structure ensures that the UAV trajectory network continuously improves its trajectory decisions based on feedback from the critic, leading to more efficient trajectory optimization over time.
5.3 Inference Steps and Complexity Analysis
During inference, the trained DA-DDPG algorithm executes actions based on learned policies without further training. Initially, given the current state
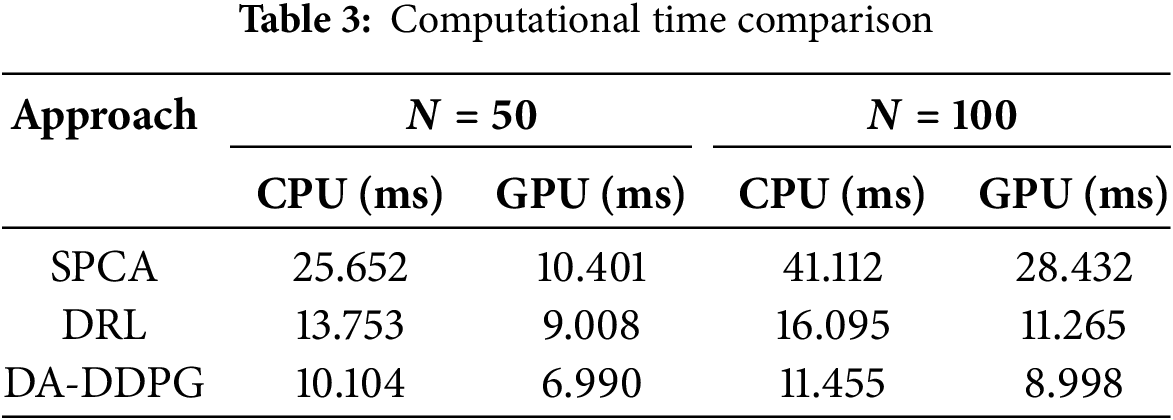
The computational complexity during inference primarily arises from the neural network architectures. For the beamforming and rate allocation agent, employing inception-like and deep unfolding structures, the complexity can be represented as
making the framework suitable for real-time applications required by URLLC scenarios.
This section presents simulation results to judge the performance of the proposed DA-DDPG framework for the multiuser UAV URLLC network. We consider a network architecture as outlined in Section II, where a total of N users are uniformly and randomly distributed within a circular area with a radius of
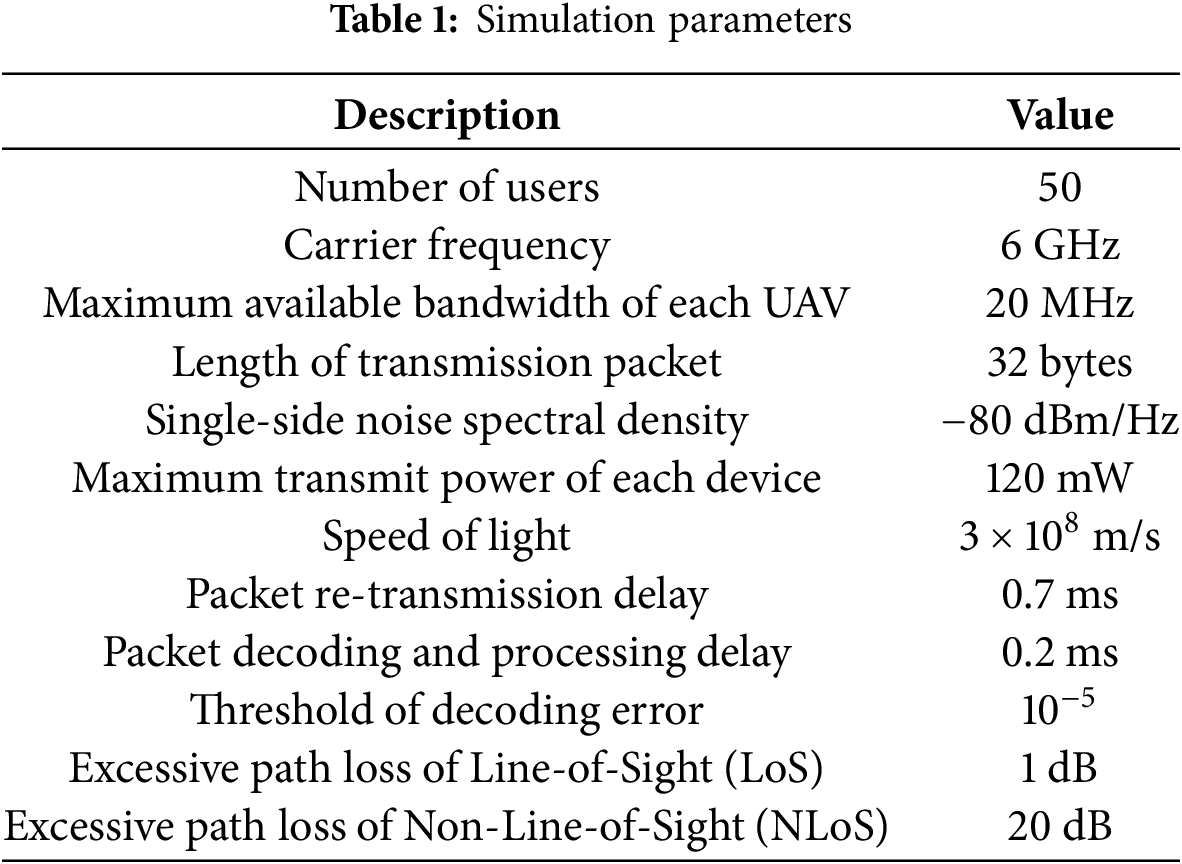
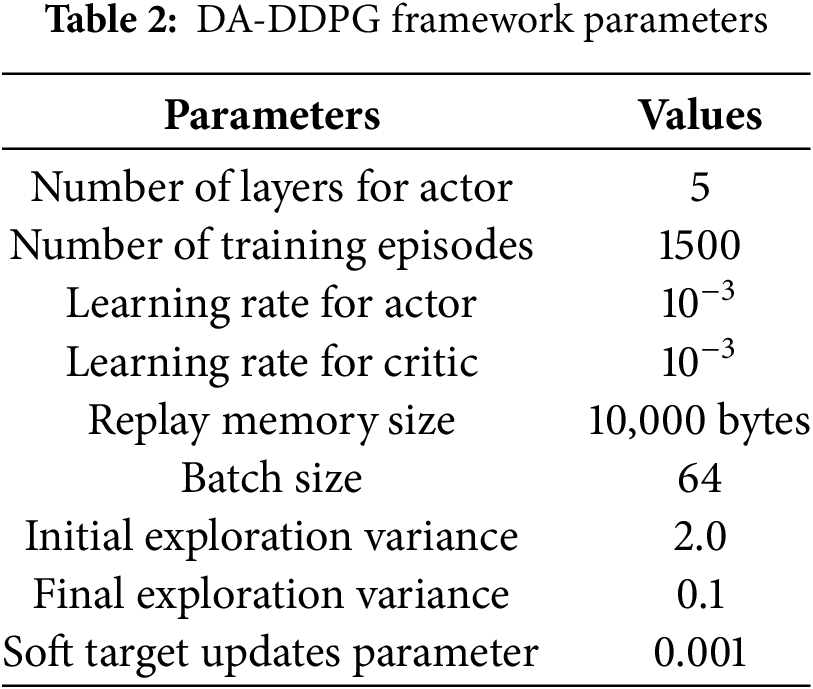
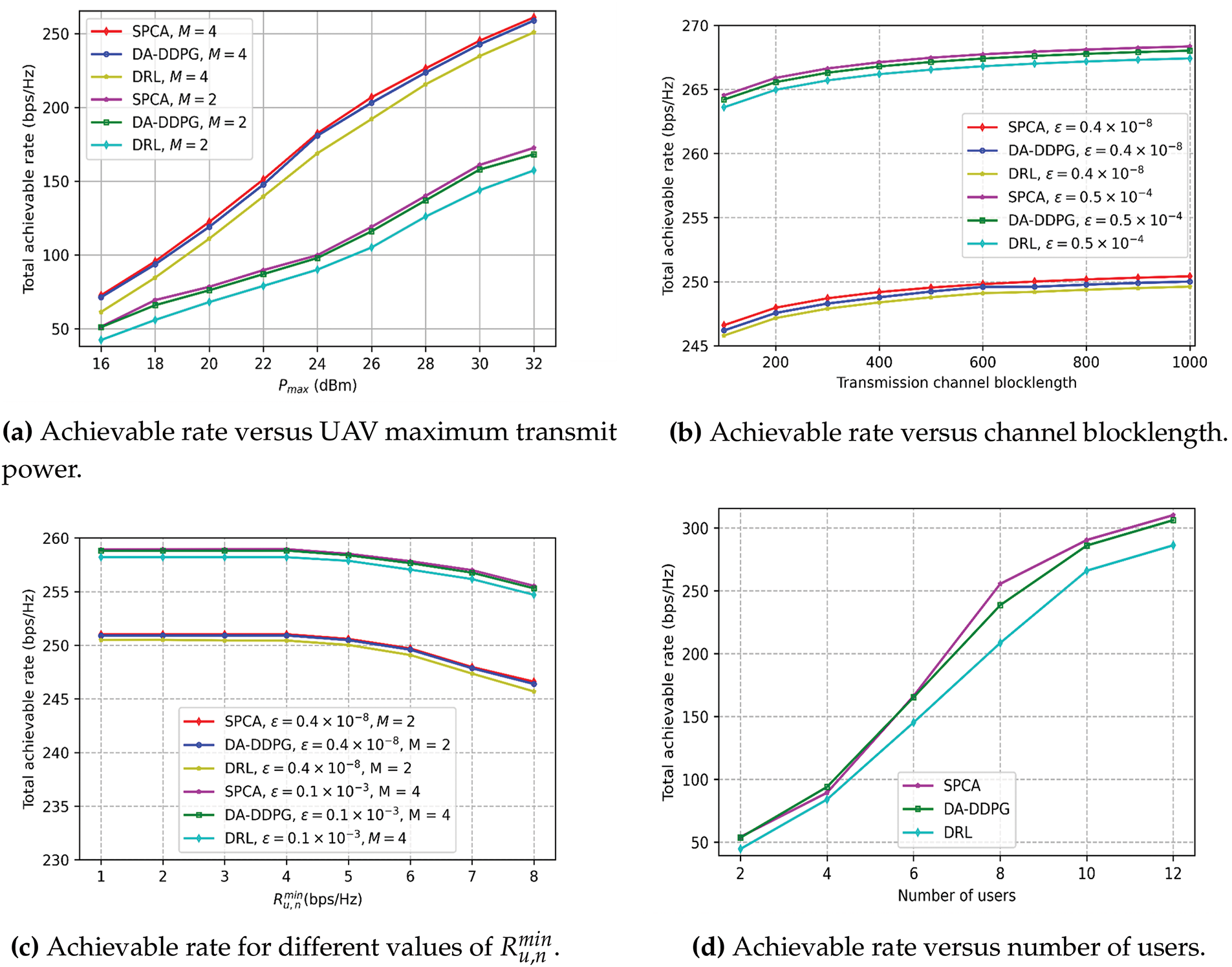
Figure 4: Performance evaluation of the proposed DA-DDPG framework. (a) Achievable rate vs. UAV maximum transmit power, (b) Achievable rate vs. channel blocklength, (c) Achievable rate for different values of
The performance in terms of achievable rate vs. transmission channel blocklength is depicted in Fig. 4b. Different values of the error threshold are set to examine the impact. We set
Fig. 4c shows the total achievable rate for different values of
The relationship between the total achievable rate and the number of users is depicted in Fig. 4d. The number of antennas is fixed at
In this work, we proposed a design of a distributed DRL framework with dual-agent deep deterministic policy gradient (DA-DDPG). A novel structure of the beamforming and rate allocation is proposed, where an inception-like mechanism and deep unfolding are employed to build the layers. To apply these two mechanisms, we designed a successive pseudo-convex approximation (SPCA) to handle both beamforming and rate allocation. A fully connected deep neural network is used for the critic network. Successive pseudo-convex approximation (SPCA) lays the ground for applying the above two techniques. The second agent is the UAV trajectory, in which both the actor and critic are based on DNN. Simulation results demonstrated the effectiveness of the proposed framework. Moreover, the proposed model outperforms other well-known methods in the literature. Additionally, developing joint resource allocation frameworks for multiple UAVs and RISs will improve scalability and load balancing, particularly in dense urban areas. Addressing security challenges in UAV-RIS networks will also ensure robust and secure communication in mission-critical applications.
Acknowledgement: The authors extend their appreciation to the Deputyship of Research & Innovation, Ministry of Education in Saudi Arabia for funding this research work through the project number RI-44-0291.
Funding Statement: The study was supported by the Deputyship of Research & Innovation, Ministry of Education in Saudi Arabia for funding this research work through the project number RI-44-0291.
Author Contributions: The authors confirm their contribution to the paper as follows: Conceptualization, Samia Allaoua Chelloug and Ammar Muthanna; methodology, Dina S. M. Hassan; software, Mohammed Saleh Ali Muthanna; validation, Reem Alkanhel and Samia Allaoua Chelloug; formal analysis, Abuzar B. M. Adam and Dina S. M. Hassan; investigation, Samia Allaoua Chelloug; resources, Ammar Muthanna and Abuzar B. M. Adam; data curation, Mohammed Saleh Ali Muthanna and Abuzar B. M. Adam; writing—original draft preparation, Reem Alkanhel and Abuzar B. M. Adam; writing—review and editing, Samia Allaoua Chelloug; visualization, Dina S. M. Hassan.; supervision, Ammar Muthanna; project administration, Reem Alkanhel; funding acquisition, Samia Allaoua Chelloug. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Chen K, Wang Y, Zhao J, Wang X, Fei Z. URLLC-oriented joint power control and resource allocation in UAV-assisted networks. IEEE Int Things J. 2021;8(12):10103–16. doi:10.1109/jiot.2021.3051322. [Google Scholar] [CrossRef]
2. Zeng C, Wang JB, Xiao M, Ding C, Chen Y, Yu H, et al. Task-oriented semantic communication over rate splitting enabled wireless control systems for URLLC services. IEEE Transact Commun. 2023;72(2):722–39. doi:10.1109/tcomm.2023.3325901. [Google Scholar] [CrossRef]
3. 3GPP. Study on scenarios and requirements for next generation access technologies. 3rd generation partnership project (3GPPTR 38913; 2022 [Internet]. [cited 2025 Apr 26]. Available from: https://www.etsi.org/deliver/etsi_tr/138900_138999/138913/18.00.00_60/tr_138913v180000p.pdf. [Google Scholar]
4. Bing L, Gu Y, Aulin T, Wang J. Design of autoconfigurable random access NOMA for URLLC industrial IoT networking. IEEE Transact Indust Informat. 2023;20(1):190–200. doi:10.1109/tii.2023.3257841. [Google Scholar] [CrossRef]
5. Soleymani M, Santamaria I, Jorswieck E, Clerckx B. Optimization of rate-splitting multiple access in beyond diagonal RIS-assisted URLLC systems. IEEE Transact Wireless Commun. 2023;23(5):5063–78. doi:10.1109/twc.2023.3324190. [Google Scholar] [CrossRef]
6. Ou X, Xie X, Lu H, Yang H. Channel blocklength minimization in MU-MISO nonorthogonal multiple access for URLLC services. IEEE Systems J. 2023;18(1):36–9. doi:10.1109/jsyst.2023.3329721. [Google Scholar] [CrossRef]
7. Sun Y, Ding Z, Dai X. On the performance of downlink NOMA in multi-cell mmWave networks. IEEE Commun Lett. 2018;22(11):2366–9. doi:10.1109/lcomm.2018.2870442. [Google Scholar] [CrossRef]
8. Mao Y, Dizdar O, Clerckx B, Schober R, Popovski P, Poor HV. Rate-splitting multiple access: fundamentals, survey, and future research trends. IEEE Commun Surv Tutor. 2022;24(4):2073–126. doi:10.1109/COMST.2022.3191937. [Google Scholar] [CrossRef]
9. Kong C, Lu H. Cooperative rate-splitting multiple access in heterogeneous networks. IEEE Commun Lett. 2023;27(10):2807–11. doi:10.1109/lcomm.2023.3309818. [Google Scholar] [CrossRef]
10. Lyu X, Aditya S, Kim J, Clerckx B. Rate-splitting multiple access: the first prototype and experimental validation of its superiority over SDMA and NOMA. IEEE Transact Wireless Commun. 2024;23(8):9986–10000. doi:10.1109/twc.2024.3367891. [Google Scholar] [CrossRef]
11. Li X, Li J, Liu Y, Ding Z, Nallanathan A. Residual transceiver hardware impairments on cooperative NOMA networks. IEEE Transact Wireless Commun. 2019;19(1):680–95. doi:10.1109/twc.2019.2947670. [Google Scholar] [CrossRef]
12. Pivoto DGS, de Figueiredo FAP, Cavdar C, Tejerina GRDL, Mendes LL. A comprehensive survey of machine learning applied to resource allocation in wireless communications. IEEE Commun Surv Tutor. 2025;1. doi:10.1109/COMST.2025.3552370. [Google Scholar] [CrossRef]
13. Huang Y, Jiang Y, Zheng FC, Zhu P, Wang D, You X. Energy-efficient optimization in user-centric cell-free massive MIMO systems for URLLC with finite blocklength communications. IEEE Transact Vehic Technol. 2024;73(9):12801–14. doi:10.1109/tvt.2024.3382341. [Google Scholar] [CrossRef]
14. Nguyen DC, Cheng P, Ding M, Lopez-Perez D, Pathirana PN, Li J, et al. Enabling AI in future wireless networks: a data life cycle perspective. IEEE Commun Surv Tutor. 2021;23(1):553–95. doi:10.1109/COMST.2020.3024783. [Google Scholar] [CrossRef]
15. Wang D, Liu Y, Yu H, Hou Y. Three-dimensional trajectory and resource allocation optimization in multi-unmanned aerial vehicle multicast system: a multi-agent reinforcement learning method. Drones. 2023;7(10):641. doi:10.3390/drones7100641. [Google Scholar] [CrossRef]
16. Robaglia BM, Coupechoux M, Tsilimantos D. Deep reinforcement learning for uplink scheduling in NOMA-URLLC networks. IEEE Transact Mach Learn Commun Netw. 2024;2(12):1142–58. doi:10.1109/tmlcn.2024.3437351. [Google Scholar] [CrossRef]
17. Ouamri MA, Barb G, Singh D, Adam AB, Muthanna MSA, Li X. Nonlinear energy-harvesting for D2D networks underlaying UAV with SWIPT using MADQN. IEEE Commun Lett. 2023;27(7):1804–8. doi:10.1109/lcomm.2023.3275989. [Google Scholar] [CrossRef]
18. Alkama D, Azni M, Ouamri MA, Li X. Modeling and performance analysis of vertical heterogeneous networks under 3D blockage effects and multiuser MIMO systems. IEEE Transact Vehic Technol. 2024;37(7):10090–105. doi:10.1109/tvt.2024.3366655. [Google Scholar] [CrossRef]
19. Ranjha A, Kaddoum G. Quasi-optimization of distance and blocklength in URLLC aided multi-hop UAV relay links. IEEE Wireless Commun Lett. 2019;9(3):306–10. doi:10.1109/lwc.2019.2953165. [Google Scholar] [CrossRef]
20. Ranjha A, Javed MA, Piran MJ, Asif M, Hussien M, Zeadally S, et al. Towards facilitating power efficient URLLC systems in UAV networks under jittering. IEEE Transact Consumer Elect. 2023;70(1):3031–41. doi:10.1109/tce.2023.3305550. [Google Scholar] [CrossRef]
21. Liu CF, Wickramasinghe ND, Suraweera HA, Bennis M, Debbah M. URLLC-aware proactive UAV placement in internet of vehicles. IEEE Transact Intell Transport Syst. 2024;25(8):10446–51. doi:10.1109/tits.2024.3352971. [Google Scholar] [CrossRef]
22. Cai Y, Jiang X, Liu M, Zhao N, Chen Y, Wang X. Resource allocation for URLLC-oriented two-way UAV relaying. IEEE Transact Vehic Technol. 2022;71(3):3344–9. doi:10.1109/tvt.2022.3143174. [Google Scholar] [CrossRef]
23. Wu Q, Cui M, Zhang G, Wang F, Wu Q, Chu X. Latency minimization for UAV-enabled URLLC-based mobile edge computing systems. IEEE Transact Wireless Commun. 2023;23(4):3298–311. doi:10.1109/TWC.2023.3307154. [Google Scholar] [CrossRef]
24. Feng R, Li Z, Wang Q, Huang J. An ADMM-based optimization method for URLLC-enabled UAV relay system. IEEE Wirel Commun Lett. 2022;11(6):1123–7. doi:10.1109/lwc.2022.3153142. [Google Scholar] [CrossRef]
25. Huang Y, Jiang Y, Zheng FC, Zhu P, Wang D, You X. Enhancing energy-efficient URLLC in cell-free mMIMO systems with transceiver impairments: an RSMA-DRL based approach. IEEE Wirel Commun Lett. 2024;13(5):1443–7. doi:10.1109/lwc.2024.3373826. [Google Scholar] [CrossRef]
26. Seong J, Toka M, Shin W. Sum-rate maximization of RSMA-based aerial communications with energy harvesting: a reinforcement learning approach. IEEE Wirel Commun Lett. 2023;12(10):1741–5. doi:10.1109/lwc.2023.3290372. [Google Scholar] [CrossRef]
27. Guo K, Wu M, Li X, Song H, Kumar N. Deep reinforcement learning and NOMA-based multi-objective RIS-assisted IS-UAV-TNs: trajectory optimization and beamforming design. IEEE Transact Intell Transport Syst. 2023;24(9):10197–210. doi:10.1109/tits.2023.3267607. [Google Scholar] [CrossRef]
28. Wu M, Gao Z, Huang Y, Xiao Z, Ng DWK, Zhang Z. Deep learning-based rate-splitting multiple access for reconfigurable intelligent surface-aided tera-hertz massive MIMO. IEEE J Selec Areas Commun. 2023;41(5):1431–51. doi:10.1109/jsac.2023.3240781. [Google Scholar] [CrossRef]
29. Khalili A, Monfared EM, Zargari S, Javan MR, Mokari N, Jorswieck EA. Resource management for transmit power minimization in UAV-assisted RIS HetNets supported by dual connectivity. IEEE Transact Wirel Commun. 2021;21(3):1806–22. doi:10.1109/twc.2021.3107306. [Google Scholar] [CrossRef]
30. Hua DT, Do QT, Dao NN, Cho S. On sum-rate maximization in downlink UAV-aided RSMA systems. ICT Express. 2024;10(1):15–21. doi:10.1016/j.icte.2023.03.001. [Google Scholar] [CrossRef]
31. Adam ABM, Elhassan MAM. Enhancing Secrecy in UAV RSMA Networks: Deep Unfolding Meets DeepReinforcement Learning. In: 2023 International Conference on Communications, Computing, Cybersecurity, andInformatics (CCCI). China: Chongqing: 2015. p. 1–5. doi:10.1109/CCCI58712.2023.10290852. [Google Scholar] [CrossRef]
32. Adam ABM, Wan X, Elhassan MAM, Muthanna MSA, Muthanna A, Kumar N, et al. Intelligent and robust UAV-aided multiuser RIS communication technique with jittering UAV and imperfect hardware constraints. IEEE Trans Veh Technol. 2023;72(8):10737–53. doi:10.1109/tvt.2023.3255309. [Google Scholar] [CrossRef]
33. Adam ABM, Wang Z, Wan X, Xu Y, Duo B. Energy-efficient power allocation in downlink multi-cell multi-carrier NOMA: special deep neural network framework. IEEE Transact Cognit Commun Netw. 2022;8(4):1770–83. doi:10.1109/tccn.2022.3198652. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools