
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Improved PPO-Based Task Offloading Strategies for Smart Grids
1 College of Electrical Engineering, North China University of Water Resources and Electric Power, Zhengzhou, 450045, China
2 School of Electrical Engineering, Xuchang University, Xuchang, 461000, China
* Corresponding Author: Ya Zhou. Email:
Computers, Materials & Continua 2025, 84(2), 3835-3856. https://doi.org/10.32604/cmc.2025.065465
Received 13 March 2025; Accepted 26 May 2025; Issue published 03 July 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Edge computing has transformed smart grids by lowering latency, reducing network congestion, and enabling real-time decision-making. Nevertheless, devising an optimal task-offloading strategy remains challenging, as it must jointly minimise energy consumption and response time under fluctuating workloads and volatile network conditions. We cast the offloading problem as a Markov Decision Process (MDP) and solve it with Deep Reinforcement Learning (DRL). Specifically, we present a three-tier architecture—end devices, edge nodes, and a cloud server—and enhance Proximal Policy Optimization (PPO) to learn adaptive, energy-aware policies. A Convolutional Neural Network (CNN) extracts high-level features from system states, enabling the agent to respond continually to changing conditions. Extensive simulations show that the proposed method reduces task latency and energy consumption far more than several baseline algorithms, thereby improving overall system performance. These results demonstrate the effectiveness and robustness of the framework for real-time task offloading in dynamic smart-grid environments.Keywords
The large-scale integration of renewable energy sources and the digital transformation of power grids are imposing new stresses on traditional centralized infrastructures, including increased latency, congestion, and energy consumption [1–5]. Modern information and communication technologies (ICT) enable smart grids to offer real-time monitoring and fine-grained dispatching; however, the high-frequency data streams generated by distributed energy resources (DERs) and massive Internet-of-Things (IoT) devices quickly overwhelm cloud-centric computing [6,7].
Edge computing mitigates these bottlenecks by processing data in close proximity to its source, thereby sharply reducing round-trip latency and easing the load on core networks [8–11]. Yet static or heuristic task-offloading schemes are ill-suited to the smart-grid context, where load fluctuations, link-quality variations, and privacy constraints are the norm. Deep reinforcement learning (DRL), with its ability to learn optimal policies through interaction, has therefore become a popular choice for dynamic offloading [12–15]. Early methods—such as Deep Q-Networks (DQN) and their derivatives—lower mean latency but suffer from slow convergence and limited scalability in highly coupled, multi-variable settings.
To address these challenges, we cast task offloading in smart grids as a Markov Decision Process (MDP) and introduce a DRL-based framework that couples a convolutional neural network (CNN) for feature extraction with an enhanced Proximal Policy Optimization (PPO) algorithm. The proposed approach delivers adaptive, energy-aware scheduling, significantly reducing task latency and energy use in dynamic grid environments while improving overall system performance.
Major contributions:
• MDP-based modeling across a three-tier architecture. We formulate task characteristics, system dynamics, and energy expenditure for end devices, edge nodes, and cloud servers under a unified MDP, enabling efficient task offloading.
• CNN-enhanced PPO. By integrating a lightweight CNN encoder with an improved PPO scheme, we accelerate training and bolster adaptability to non-stationary conditions.
• Comprehensive simulations. Extensive experiments under dynamic, multi-task scenarios demonstrate substantial gains in latency, energy savings, and resource utilization.
The remainder of this paper is organized as follows: Section 2 surveys related research; Section 3 details the system model; Section 4 reviews foundational concepts in deep reinforcement learning; Section 5 presents the MDP formulation; Section 6 describes the DRL-based offloading and scheduling strategy; Section 7 evaluates performance via simulations; and Section 8 concludes the paper.
Early studies relied on linear/non-linear and mixed-integer programming to solve offloading and resource-allocation problems [16]. While these methods can approximate globally optimal offline solutions, their computational complexity grows exponentially with network size, and they assume static links and loads, limiting real-time applicability.
To reduce complexity, subsequent work adopted greedy, threshold-based, or genetic heuristics [17,18]. More recently, DRL has gained prominence for its model-free, online adaptability. For instance, the Task Prediction and Multi-Objective Optimization Algorithm (TPMOA) minimizes user wait and rendering delay in wireless virtual-reality offloading [19]. Hybrid-PPO, a customized PPO variant with parameterized discrete–continuous action spaces, improves offloading efficiency [20]. Combining a Slime-Mould Algorithm (SMA) with an optimized Harris Hawks Optimizer (HHO), HS-HHO clusters tasks for edge–cloud collaboration, reducing energy consumption alongside delay [21].
In power-IoT (PIoT) scenarios [22,23], offloading must honor the stringent real-time and reliability requirements of power-system operations. Prior art includes quota-matching offloading in wireless sensor networks [24], joint optimization of service caching [25], and Q-learning-driven hydro–power co-scheduling [26]; these methods typically introduce grid-specific priorities or stochastic models to capture pulse-load characteristics. PPO, favored for its stability and implementation ease, has been applied in multi-agent form to cooperative offloading and resource allocation in small-cell MEC [27], vehicular networks [28], and fog–edge hybrids [29], consistently improving delay and energy efficiency with good distributed scalability.
Most existing studies assume stable link bandwidth and homogeneous computing capacity, overlooking the peak-load spikes and link disturbances that frequently occur in smart grids. In addition, when faced with high-dimensional, coupled state variables—such as link rate, task size, and residual central processing unit (CPU) cycles—current models rarely employ lightweight feature extractors, resulting in significant inference delays. To address these shortcomings, we design a Convolutional Neural Network–Proximal Policy Optimization (CNN–PPO) framework: the CNN first distils salient features from the high-dimensional state space, and the resulting embeddings are fed into a shared-parameter actor–critic network that estimates both the policy and the value function. This architecture enables real-time inference while substantially improving training stability and scalability.
3 System Model and Related Mathematical Formulation
The smart grid integrates distributed energy resources, smart meters, electric vehicles, and other intelligent devices via advanced wireless networks and edge-computing infrastructure, forming a highly interactive, computation-intensive cyber-physical system. In this context, computing resources must not only satisfy the terminal devices’ stringent real-time requirements but also preserve overall grid stability.
Fig. 1 presents a three-tier edge-computing architecture for smart grids comprising: (i) the terminal layer, populated by local processing units (LPUs); (ii) the edge layer, implemented via mobile-edge computing (MEC) nodes; and (iii) the cloud layer, represented by a distribution cloud center (CC). The cloud layer undertakes centralized processing and global coordination. The terminal layer encompasses heterogeneous electrical equipment, while the edge layer supplies intermediate computation and storage through edge nodes and micro-data servers. Each edge node aggregates sampled data from differential-protection terminals together with operational metrics from the distribution network, thereby enabling automated load monitoring, anomaly detection, power-quality assessment, and consumption analytics. The processed insights are then translated into control commands that regulate field devices in real time.
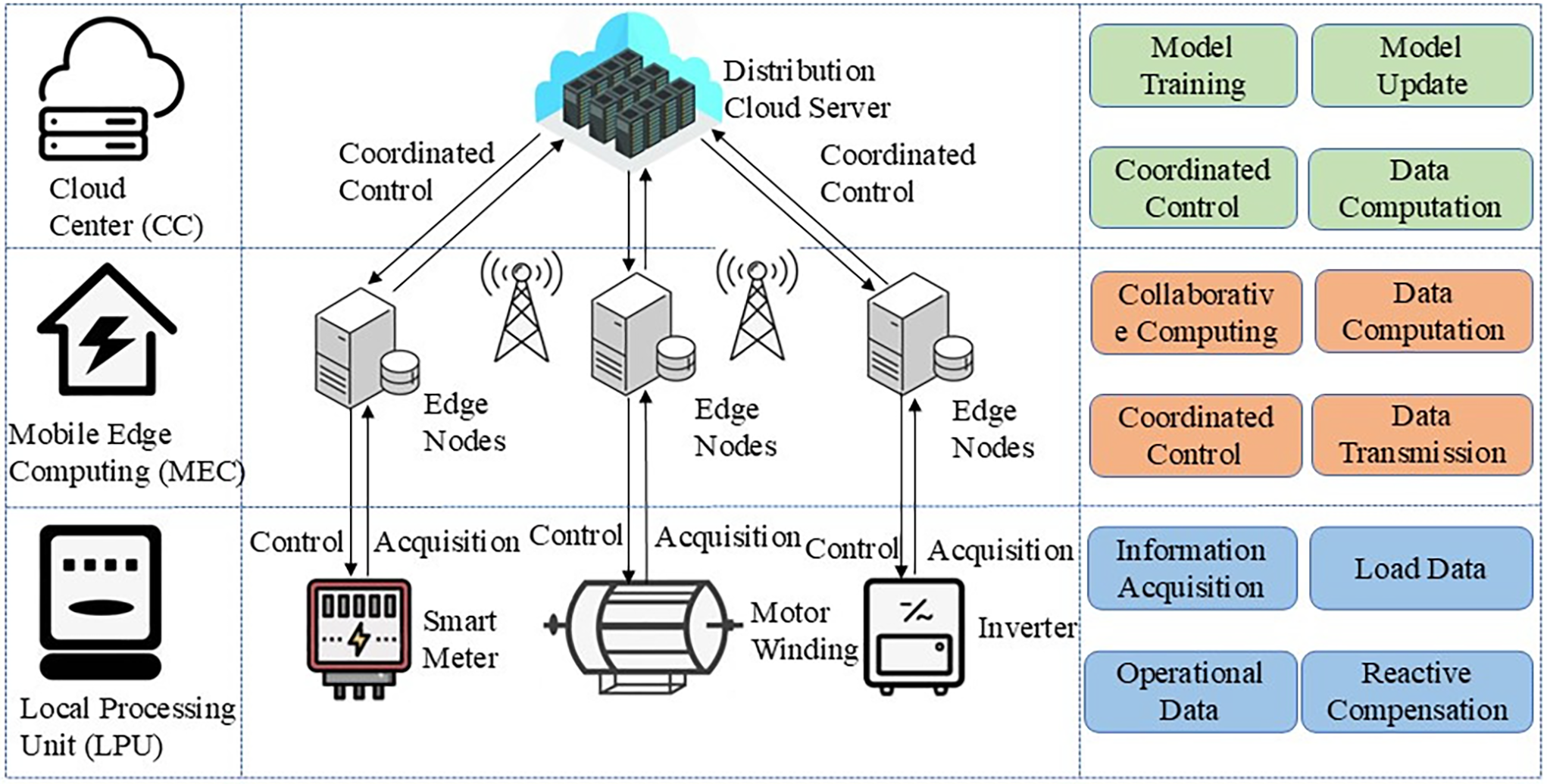
Figure 1: Hierarchical task offloading and execution framework
In a smart-grid environment, every intelligent terminal generates a stream of application-driven tasks—ranging from periodic data acquisition and anomaly detection to device-state monitoring, load forecasting, and advanced analytics. We model the aggregate arrival process as a Poisson process with intensity
where
Tasks are serviced under a finite–buffer, first-come–first-served (FCFS) discipline. When the buffer is full, additional arrivals are dropped, producing overflow events. Representing the queue as a fixed-size matrix—each row corresponding to a single task—facilitates efficient, dynamic updates as tasks are admitted or completed, thereby providing a tractable abstraction for subsequent scheduling and off-loading analysis.
In smart grids and edge-computing scenarios, the communication module is pivotal. Wireless channels, influenced by fading, interference, and device mobility, evolve dynamically. To capture these fluctuations, we employ a sinusoidal time-varying channel model that reflects the periodic changes in transmission rate commonly caused by traffic congestion or multipath propagation. Time is discretised into fixed-length slots; the channel state is assumed to remain constant within each slot but may differ from one slot to the next, thereby affecting both the achievable data rate and task-offloading decisions.
Let
where
In this model, periodic fluctuations in transmission rates are suitable for two types of communication scenarios. For edge-to-edge communication, the transmission rate
where
For cloud communication, the transmission rate
where
We employ a sinusoidal model to capture the periodic fluctuations of wireless channels in smart-grid and edge-computing environments. Although this streamlined formulation omits complex phenomena such as multipath fading and sudden blockages, it nevertheless reflects the dominant variability observed in substation-level deployments with largely stationary nodes. Its low computational overhead makes the model well-suited to analysing task-offloading and resource-optimisation strategies. Future work could extend this framework by integrating more sophisticated channel models tailored to highly dynamic scenarios.
In smart grids, computational tasks can be executed either locally on terminal devices via their on-board Local Processing Units (LPUs) or off-loaded to edge servers over wireless links. To characterise the resulting computation time and energy expenditure, we develop analytical models for local, edge, and cloud execution. These models quantify resource consumption and performance trade-offs among the three modes, thereby providing theoretical guidance for optimising task-offloading decisions.
(1) Local Execution Model. Under the local execution mode, tasks are processed by the LPU on terminal devices. LPUs typically have limited computational power but can efficiently handle latency-sensitive tasks. For a task
where
The energy consumption of local computation depends on the power consumption model of the LPU. Generally, power
where
(2) Edge Execution Model. In the edge execution mode, task data is first transmitted via wireless networks to an edge server and then processed at the server. For a task
where
where
where
(3) Cloud Execution Model. In the cloud execution mode, tasks are offloaded to cloud servers for execution. Cloud servers have the highest computational power but incur higher transmission delays and energy costs due to the distance. The execution time for a task
where
where
(4) Cloud Energy Consumption. Cloud energy consumption includes the energy used for data transmission and the energy consumed by receiving results. Since cloud servers are not energy-constrained, the energy consumption of smart devices is primarily concentrated in the communication stage:
where
In smart-grid environments, geographically distributed devices continually generate computational workloads—including energy forecasting, real-time monitoring, and data analytics. Minimising latency and energy consumption therefore depends on selecting both an appropriate execution venue and an optimal execution schedule for each task. To address this challenge, we propose an optimisation framework that jointly allocates computational and communication resources while orchestrating task execution, thereby enhancing overall system performance.
For each task
The total delay experienced by a task
where
Similarly, combining the system scheduling model, the energy consumption for task execution can be expressed as a function of the scheduling decision and execution time:
where
To optimize the execution efficiency of intelligent tasks in the smart grid, the system’s objective is to minimize the average cost of all tasks generated within a specified time period
Our model minimizes the average cost per task to optimize long-term system performance despite challenges from random task arrivals and unpredictable wireless conditions. In dynamic smart grid scenarios, where task arrival rates, data volumes, and resource availability vary, static methods fail. We propose a Deep Reinforcement Learning (DRL) approach to achieve optimal task offloading and scheduling through adaptive, continuous learning.
4 Background of Deep Reinforcement Learning (DRL)
Deep Reinforcement Learning (DRL) is an enhancement of traditional reinforcement learning (RL) that introduces deep neural networks (DNNs) to approximate state representations and functions. The core concept of RL is to enable an intelligent agent to interact with its environment and learn an optimal strategy through continuous exploration. In reinforcement learning, at each time step
where
In the mathematical framework of RL, the problem is typically defined as a Markov Decision Process (MDP):
where
where
The goal of DRL is to find an optimal policy
In practical applications, DRL uses deep neural networks (DNNs) to approximate policies and value functions. Leveraging the feature representation capabilities of DNNs, DRL can adapt to large-scale state spaces. Currently, DRL methods are categorized into two major approaches: value-based methods and policy-based methods.
Value-Based Methods. In value-based methods, DNNs are employed to approximate the value function, commonly referred to as the Q-network (Deep Q-Network, DQN) and its variations. The core idea is to minimize the loss between the DNN-predicted value and the true target value, formally expressed as:
where
Policy-Based Methods. Policy-based methods directly use DNNs to approximate the parameterized policy, known as the policy network. Typical policy-based algorithms include REINFORCE and Actor-Critic, which exhibit higher sample efficiency and learning capabilities. A common policy gradient update equation is:
where
Proximal Policy Optimization (PPO). To enhance exploration while avoiding local optima, the Generalized Advantage Estimation (GAE) method is introduced to balance bias and variance:
where
where
Based on the above framework, this paper employs the PPO-based DRL method to design the task offloading strategy in smart grids. The clipped objective ensures stable policy updates while enhancing the model’s adaptability, enabling the system to make efficient scheduling decisions in dynamic communication environments and achieve resource optimization.
We address the task-offloading problem with deep reinforcement learning (DRL). By casting dynamic task allocation as a Markov decision process (MDP), we leverage DRL to learn an offloading policy that maximizes efficiency.
At each time step during smart grid task offloading and scheduling, the system orchestrator monitors the current system state and determines offloading decisions. To accurately represent tasks, computational resources, and communication link dynamics, we define the state space as a collection of relevant variables, formally expressed as:
where the state space S includes multiple key variables describing task execution states at the local, edge server, and cloud server levels, as well as data transmission conditions and network states. These components are detailed as follows:
(1) We define the task queue
(2) Local Processing Unit State
where
(3) Edge Server Transmission Queue State
when
(4) Cloud Transmission Queue State
(5) Edge Server State
where
(6) Cloud Server State
where
(7) Transmission Rates R: Transmission rates
Within the devised MDP framework, the action space comprises three principal task-scheduling options: Local Processing (LP), Edge Processing (EP), and Cloud Processing (CP). These alternatives are selected to optimize task offloading in smart-grid environments by striking an effective balance between execution latency and energy consumption. A detailed description of each action type follows.
1) Local Processing (LP): The Local Processing action refers to assigning tasks from the queue to the Local Processing Unit (LPU) for execution. The complete set of actions can be expressed as:
where
When
2) Edge Processing (EP): The Edge Processing action refers to offloading tasks from the queue to the Edge Server for execution. This set of actions is defined as:
where
When
3) Cloud Processing (CP): The Cloud Processing action refers to offloading tasks from the queue to the Cloud Server for execution. This set of actions is defined as:
where
When
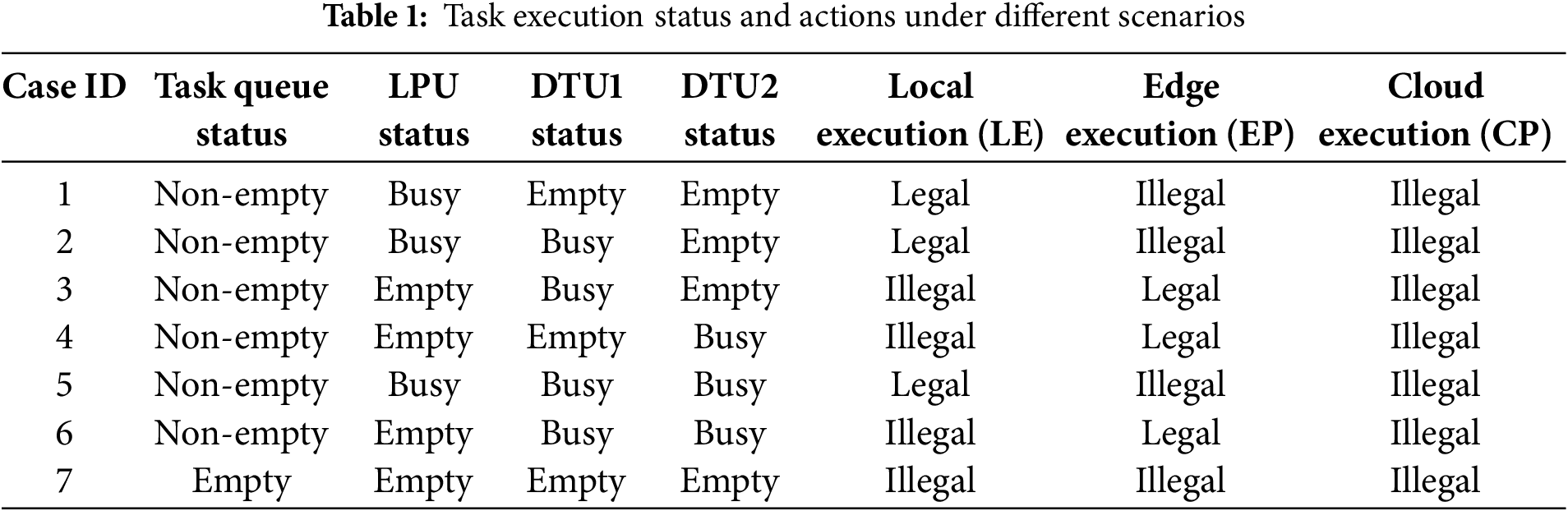
4) We introduce a dynamic action selection mechanism that evaluates the system’s state—task queue, LPU, and DTUs—at each time step. This mechanism adaptively chooses valid actions (Local Execution, Edge Processing, Cloud Processing) based on real-time conditions to optimize resource utilization and minimize delays. For instance, if the task queue is non-empty and the LPU is idle, local execution reduces communication latency. If tasks demand more resources, offloading to edge or cloud servers becomes available when DTUs are idle (Table 1). This dynamic scheduling mechanism ensures effective resource allocation and improved system performance.
In a three-layer smart grid framework (terminal devices, edge servers, and cloud servers), the reward function optimizes task offloading by balancing delay and energy consumption.
Delay and Energy Consumption Calculation: The orchestrator schedules task offloading decisions at discrete time intervals. Assume that at time
where q[t] is the number of tasks in the task queue.
At time t, the total energy consumption
Thus, the total energy consumption during the transition is:
Therefore, the overall cost is:
where
To optimize task offloading strategies, the reward function is defined as the negative of the total cost:
where
Cumulative Reward Function. In the smart grid task offloading problem, the cumulative reward function evaluates the long-term performance of a scheduling strategy. Starting from an initial state
where
By maximizing
6 DRL-Based Task Offloading and Scheduling
This section presents a novel deep neural network (DNN) architecture trained with Proximal Policy Optimization (PPO). The DNN is tailored to extract complex patterns from high-dimensional data, while PPO updates the policy parameters in a way that carefully balances exploration and exploitation, thereby ensuring stable convergence. Comprehensive experiments show that the proposed method yields significant performance improvements over prevailing approaches.
As illustrated in Fig. 2, the proposed DRL framework is designed to simultaneously approximate the task offloading policy and estimate the value function. To achieve this, we develop a parameter-sharing deep neural network (DNN) that approximates two objectives: the task offloading policy
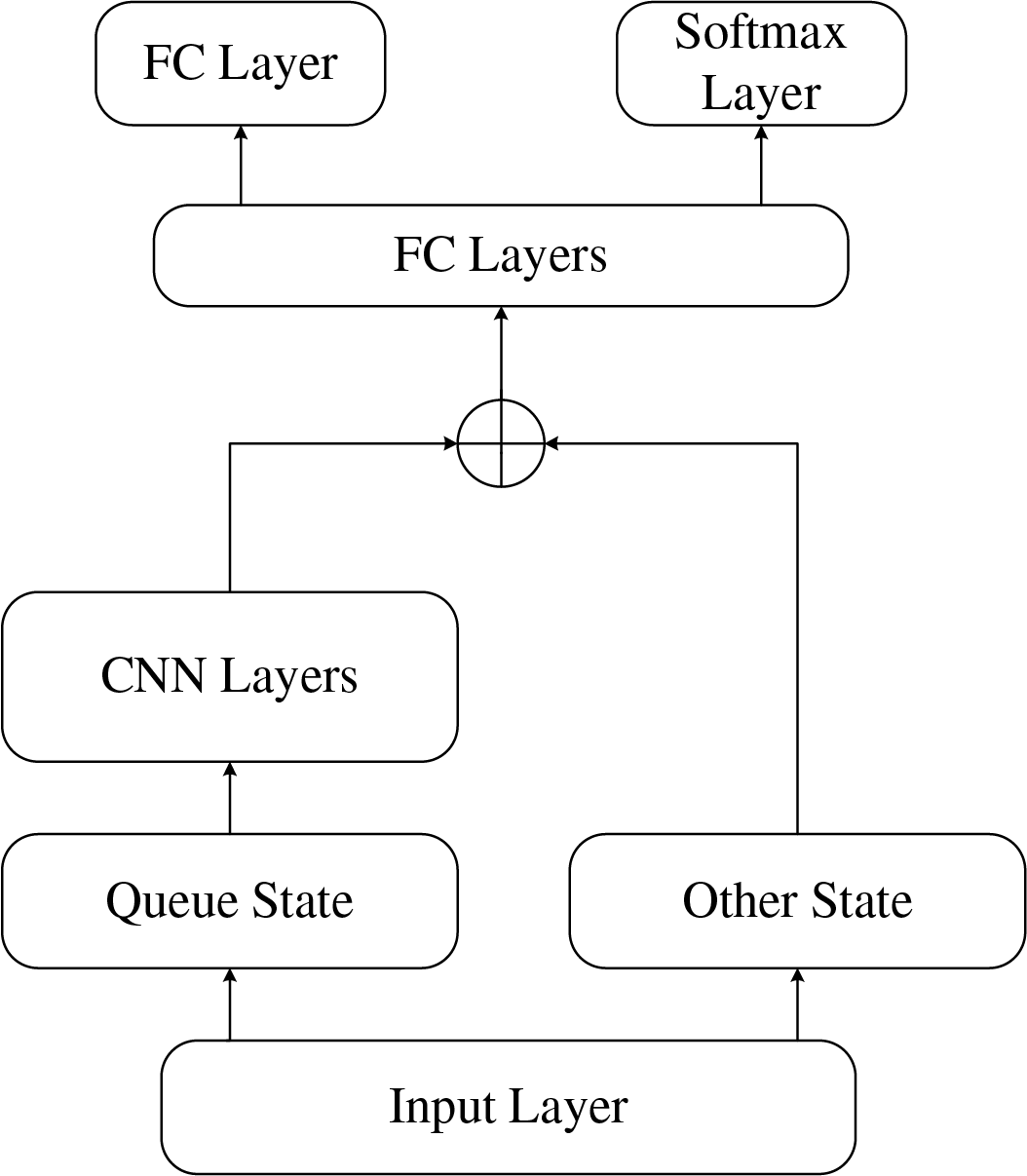
Figure 2: Neural network architecture
Due to the overwhelming size of the input state, processing becomes challenging; moreover, since the data stored in task queue Q are structured, we employed a Convolutional Neural Network (CNN) for feature extraction. Subsequent studies have demonstrated that this architecture significantly enhances training performance compared to using solely fully connected layers.
We use a shared-parameter DNN where the objective function combines errors from both the policy and value networks. To enhance sample efficiency and stabilize policy updates, we employ Generalized Advantage Estimation (GAE).
The policy network is optimized using the PPO Clipped Objective, while the value network minimizes the state-value error. The overall optimization objective is expressed as:
where
As shown in Algorithm 1, the training process alternates between sampling and optimization phases. During the sampling phase, the old policy
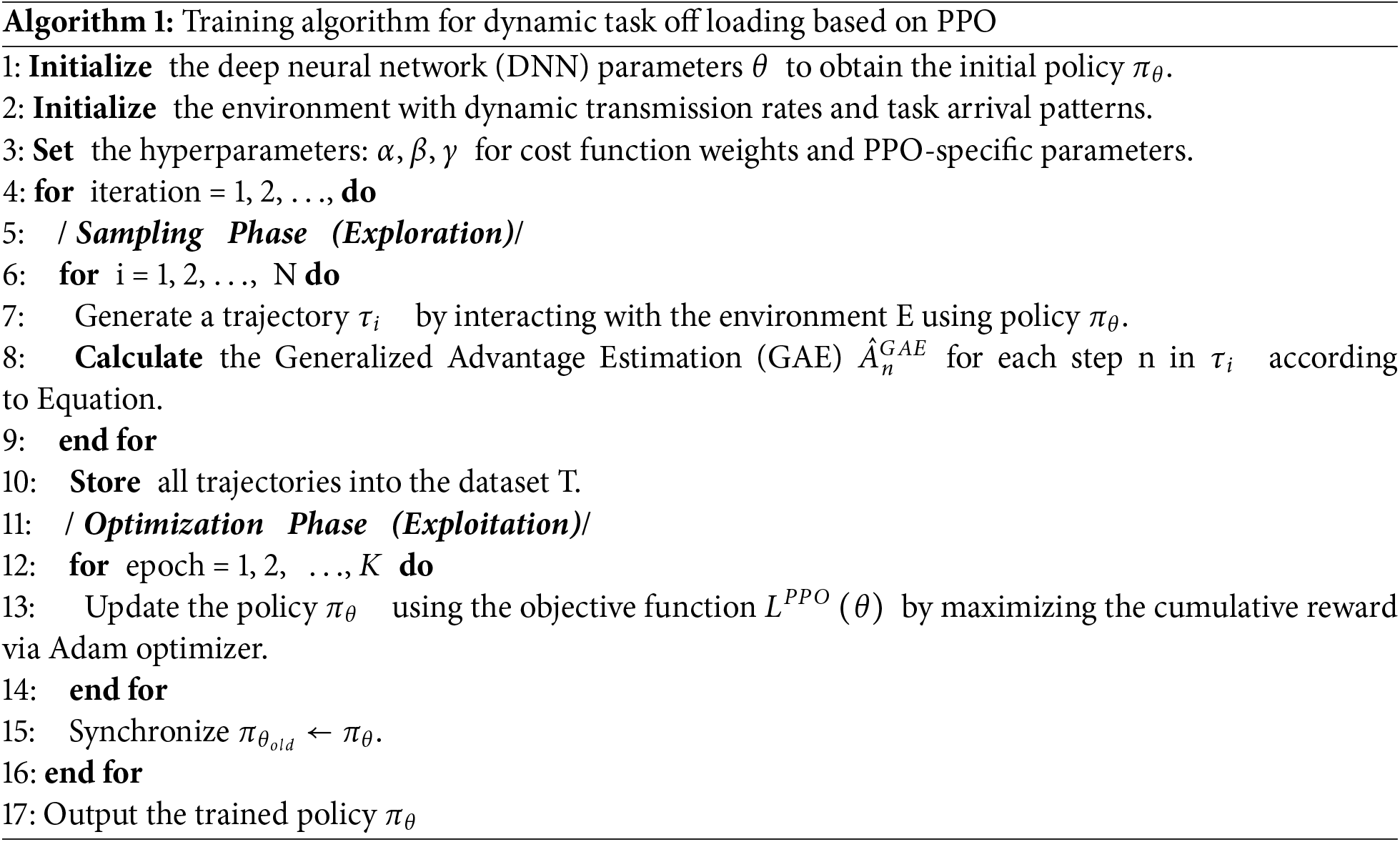
To improve training efficiency, the Generalized Advantage Estimate
During the optimization phase, the collected trajectory data are used to update the policy network. The parameters
During sampling, the exploration policy may choose invalid actions—for example, executing tasks locally when the LPU is saturated. To prevent errors, a validity constraint mechanism is implemented: invalid actions are ignored, the current state is maintained, and a valid action is reselected, ensuring that optimization proceeds correctly.
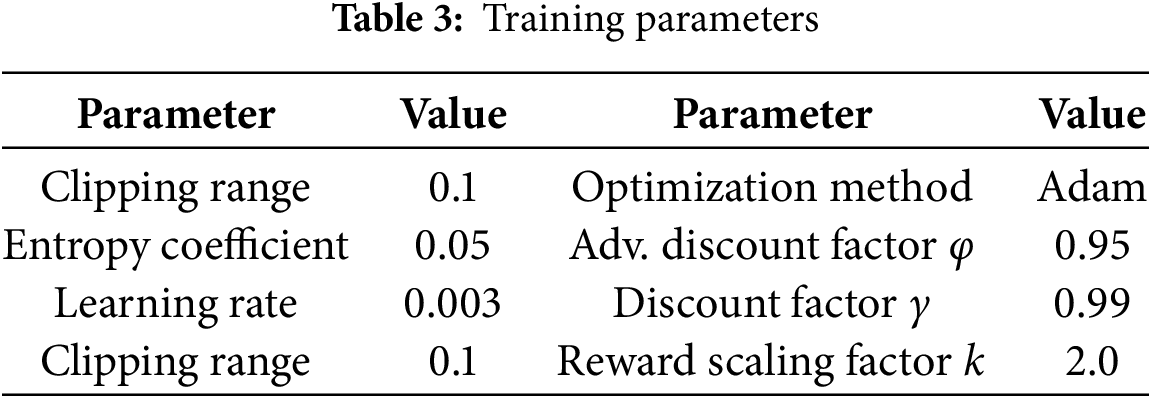
This section provides a comprehensive evaluation of the proposed PPO-based Offloading Strategy Method (PPO-OSM) through extensive simulation experiments. The algorithm and its neural architecture are implemented in TensorFlow. Key simulation settings and training hyper-parameters are summarized in Tables 2 and 3 [30], respectively.
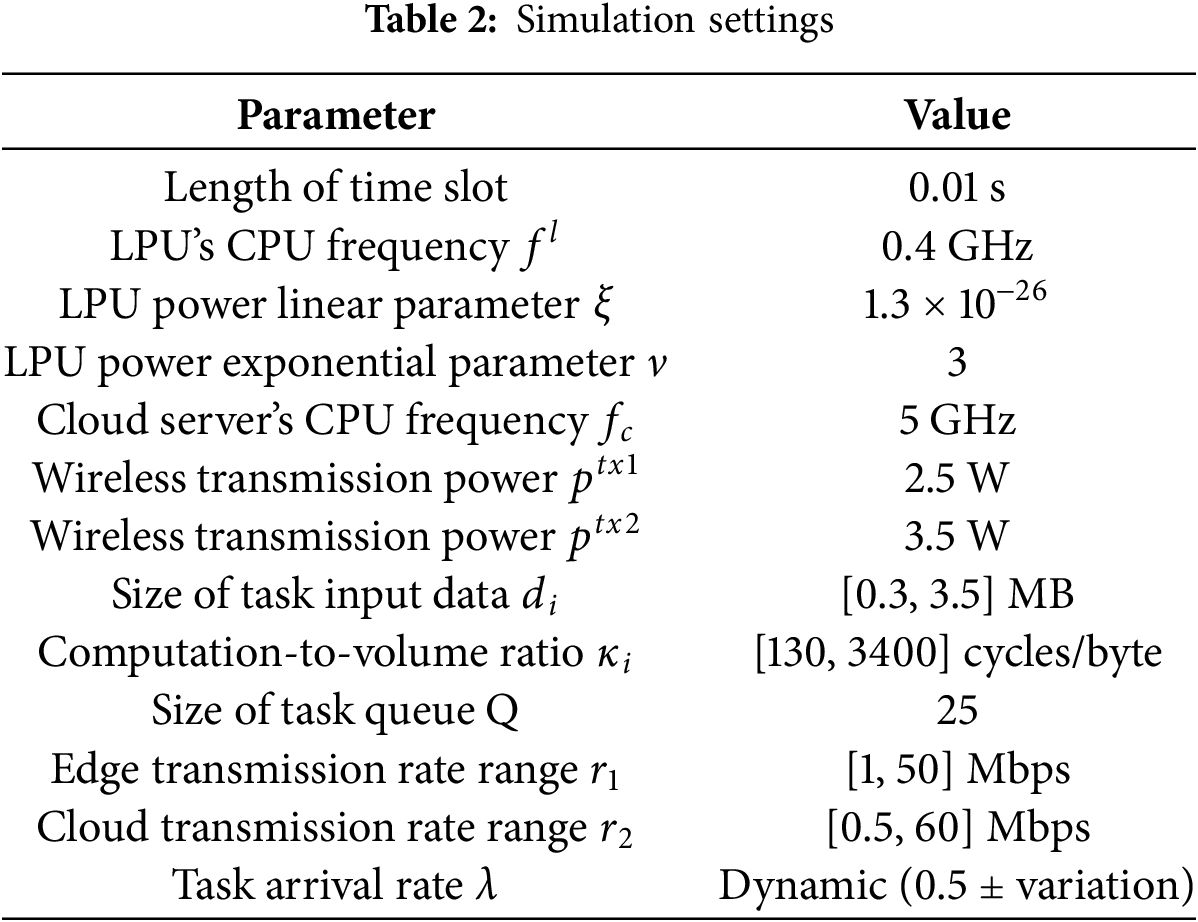
We set the time step duration to 0.01 s, during which the system updates task scheduling and status at each interval. Parameters for the Local Processing Unit (LPU) are configured based on. Thus, the local computational power consumption
In smart grid environments, transmission rates change dynamically over time due to variations in node distance and other factors. We use a sinusoidal model to represent these periodic rate fluctuations. Specifically,
Our simulation integrates system parameters—such as LPU configurations, edge servers (MEC), and cloud computing (CC) resources—to form a cohesive environment. As task complexity increases, DRL-based scheduling strategies like PPOOSM adapt to changing conditions, learn optimal offloading decisions, and enhance overall task scheduling performance.
To assess the efficacy of the proposed PPO-based Offloading Strategy Method (PPO-OSM), we conducted experiments under the conditions illustrated in Fig. 3. PPO-OSM was benchmarked against a baseline PPO implementation that uses only fully connected (FC) layers; both algorithms were trained with identical hyper-parameters, and their learning curves were logged. As shown in Fig. 3, PPO-OSM consistently achieves higher cumulative rewards and converges more rapidly than the baseline.
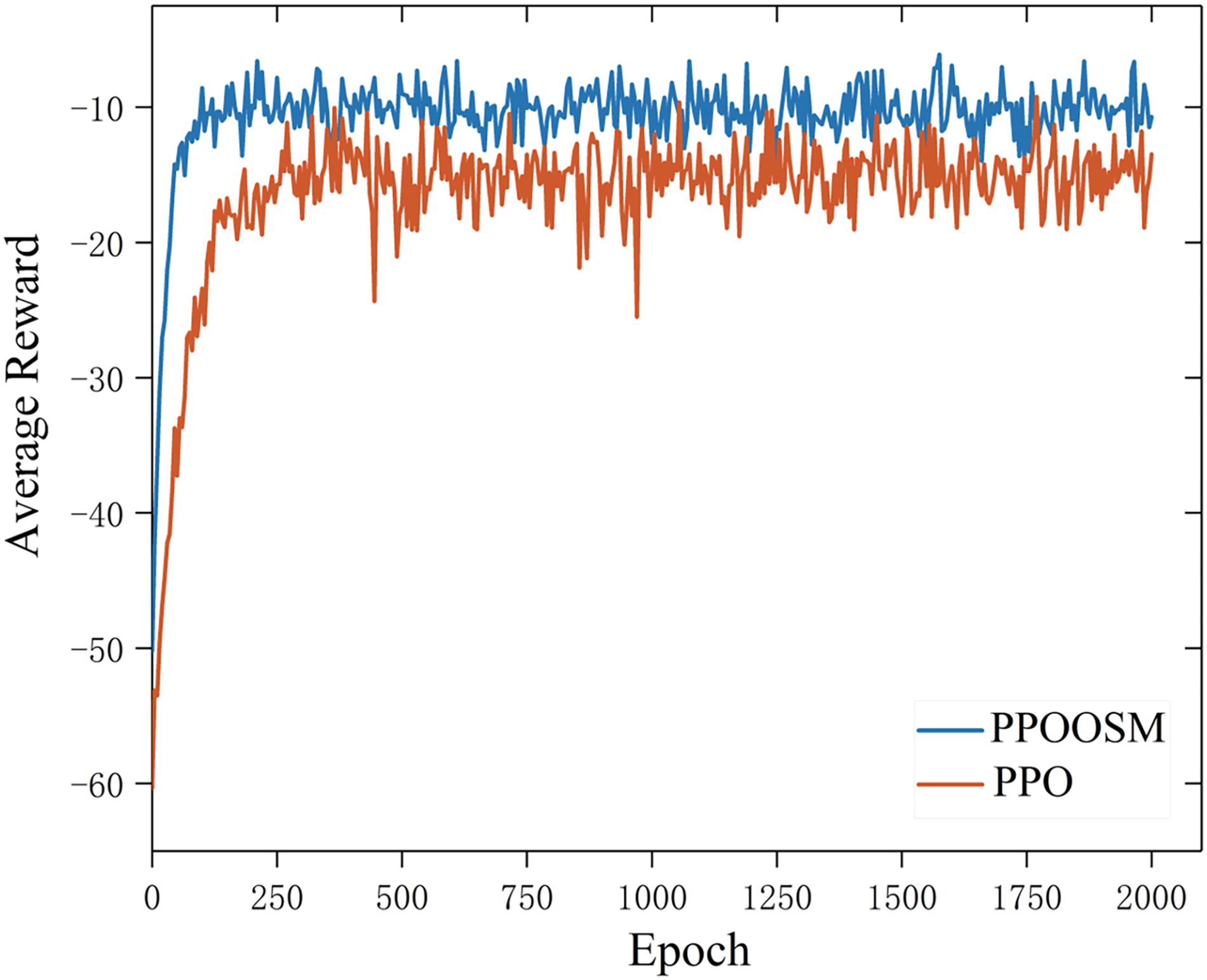
Figure 3: Comparison of average reward over training epochs for PPO and PPO-OSM
Our experiments show that PPOOSM significantly accelerates training, with cumulative rewards stabilizing after about 100 epochs. In contrast, the FC-based PPO algorithm exhibits erratic performance and slower convergence—its cumulative rewards even drop around 500 epochs. Additionally, PPOOSM enhances both task offloading and strategy optimization, effectively balancing task delay and energy consumption. Overall, these results demonstrate that PPOOSM is more efficient, stable, and robust for optimizing task offloading in dynamic environments than the conventional FC-based PPO.
7.2 Analysis of Performance under Different Biases
We assessed the proposed PPO-based offloading strategy (PPOOSM) under a range of latency–energy preference settings and benchmarked it against five representative baselines:
• All-Local Execution (AL): every task is processed entirely on the device’s local CPU.
• All-Edge Offloading (AE): all tasks are offloaded to an edge server, regardless of wireless-channel conditions. All-Cloud Offloading (AC): all tasks are transmitted straight to the cloud, ignoring backhaul and fronthaul constraints.
• PPO: the standard Proximal Policy Optimization algorithm directly applied to the offloading decision problem, with no additional multi-objective shaping.
• Genetic Algorithm (GA): a heuristic implemented with the DEAP library that evolves offloading decisions through selection, crossover, and mutation.
As illustrated in Figs. 4 and 5—which decompose the overall cost into latency and energy components—the six evaluated strategies display markedly different behaviours as the latency-weighting factor α increases (β is fixed at 1). All-Local execution (AL), in which every task is processed on the resource-constrained device, consistently yields the highest delay and energy consumption. All-Edge (AE) and All-Cloud (AC) offloading shorten latency slightly relative to AL, yet they remain energy-intensive and cannot adapt to wireless-channel fluctuations, causing their performance to cluster in the upper regions of both plots. The heuristic Genetic Algorithm (GA) reduces delay appreciably—especially when α ≤ 0.3—but achieves only moderate energy savings. PPO further lowers energy consumption through policy-gradient updates, although its average delay is still marginally higher than that of GA. By contrast, PPOOSM adapts its offloading policy online and therefore attains the lowest energy usage across all settings; moreover, once α ≈ 0.3, it also achieves the smallest delay among all schemes. These results demonstrate that PPOOSM offers the most favourable latency—energy trade-off in realistic smart-grid scenarios.
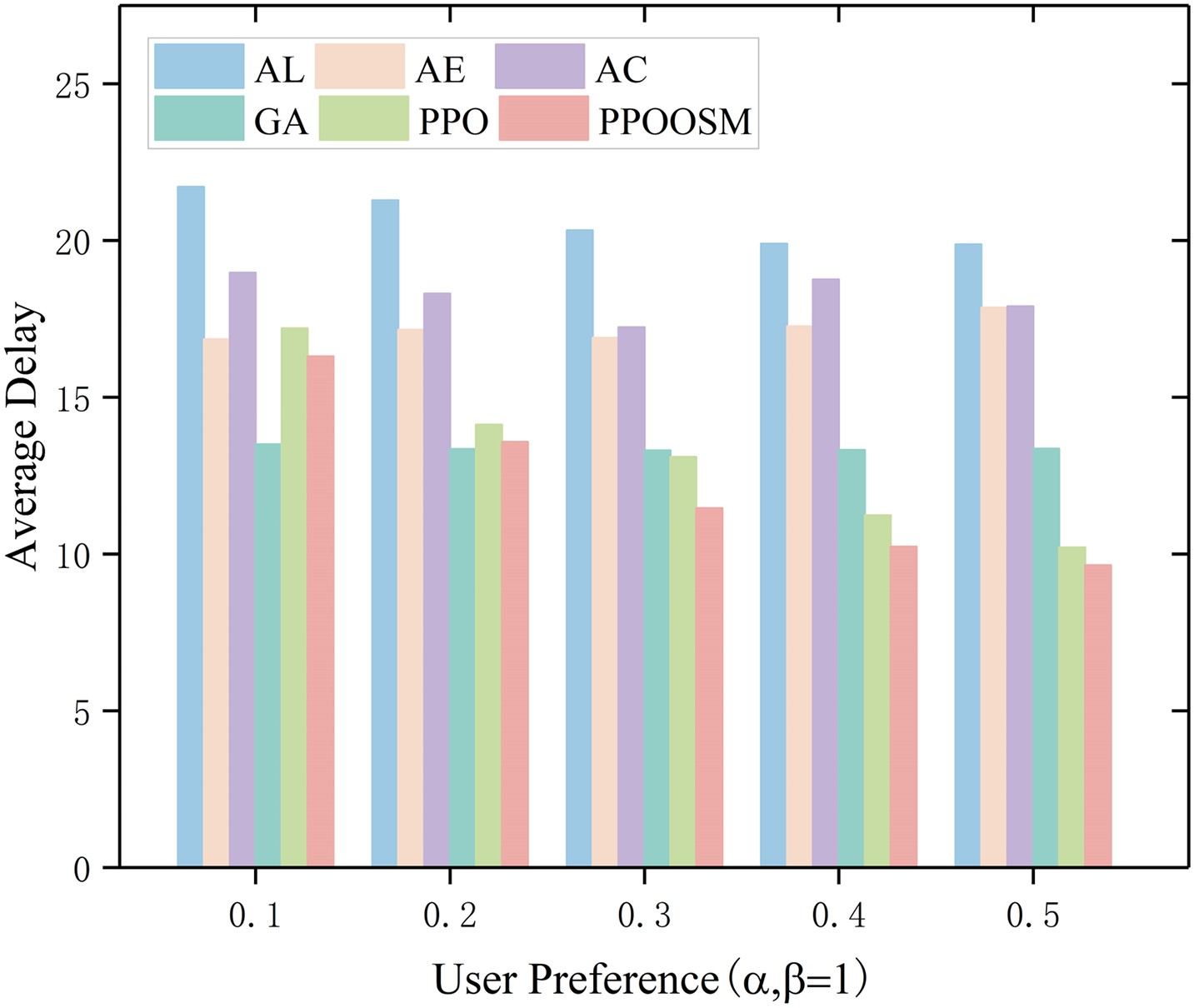
Figure 4: Comparison of average delay
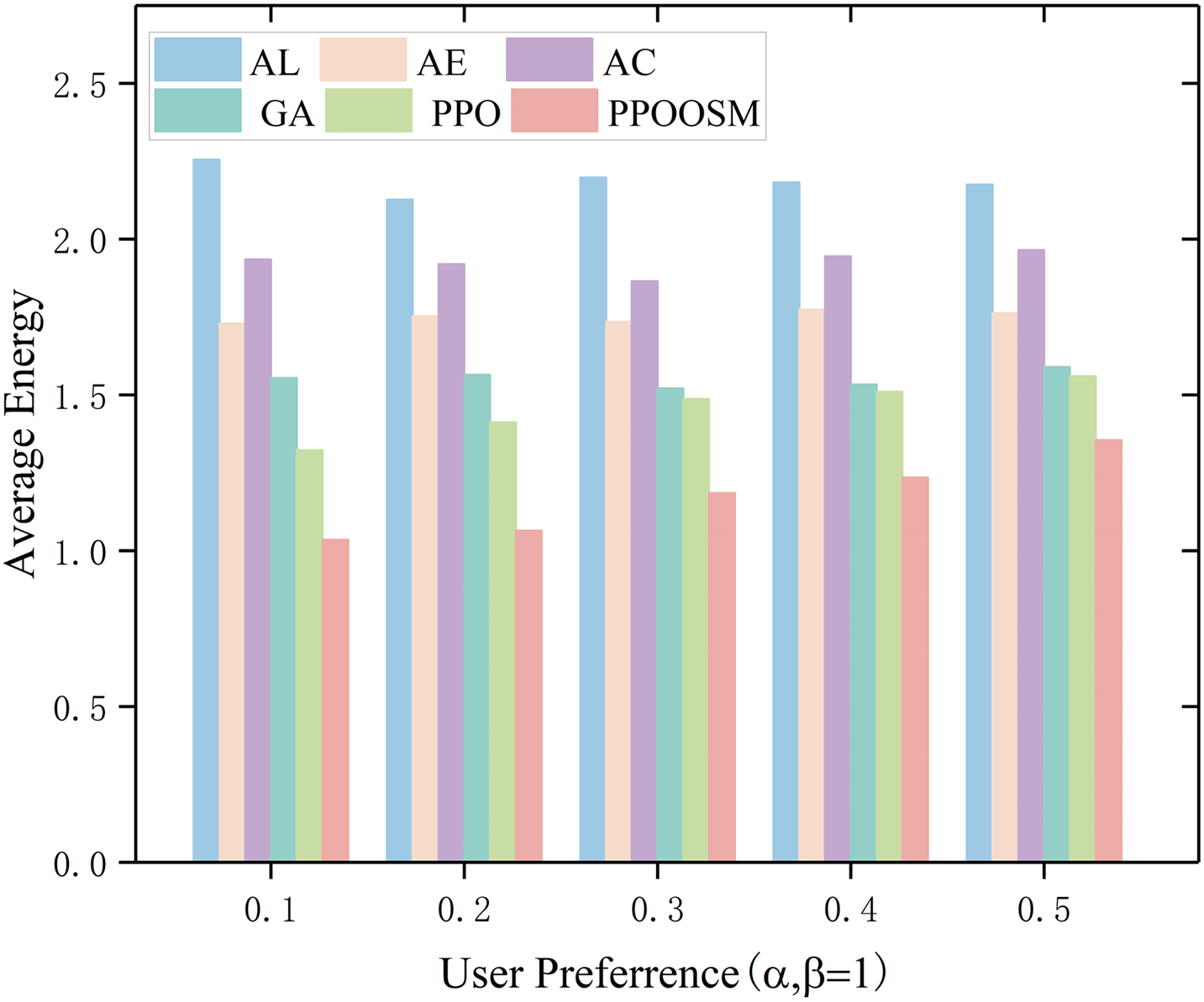
Figure 5: Comparison of average energy
Fig. 6 reveals that the static schemes—AL, AE, and AC—incur the highest overall cost because they lack the flexibility required to cope with a dynamic environment. In contrast, PPOOSM, GA, and PPO strike a more favorable balance between computation and transmission expenses. Notably, by embedding a convolutional neural network (CNN) within its policy network, PPOOSM not only reduces the average cost most substantially but also delivers superior stability and adaptability compared with GA and PPO.
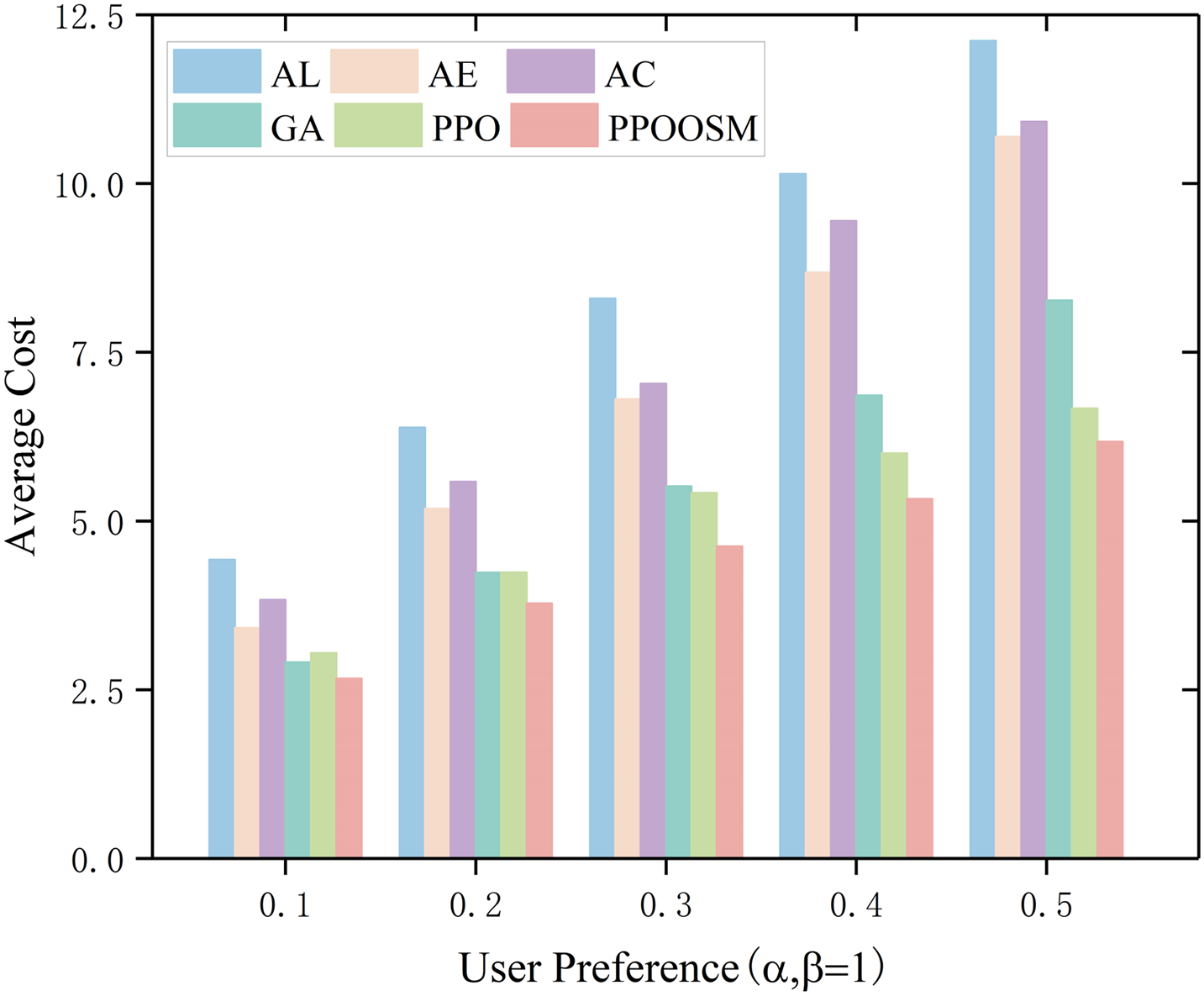
Figure 6: Comparison of average cost
7.3 Performance Analysis in Dynamic Queue Scenarios
In the Dynamic Queue Scenario (DQS), we evaluated the performance of different task offloading strategies as the task load incrementally increased. The analysis particularly focused on variations in average delay, energy consumption, and overall cost. In the experiments, we set the parameters α = 0.4, β = 1, simulating each algorithm under varying load factors ranging from 0.1 (low load) to 1.0 (high load). Through the analysis of experimental data, we could clearly observe the performance advantages of each strategy under different load levels.
As the workload intensity λ increases (Figs. 7 and 8), all schemes experience higher latency, but the growth rates diverge: AL climbs most steeply, while AC and AE deteriorate once network congestion sets in. PPO keeps delay low with an almost linear trend, and PPOOSM flattens the curve even further, achieving the smallest latency across the entire range. Energy consumption follows the same ordering: the static policies (AL, AE, AC) remain high and nearly flat, PPO cuts energy appreciably, and PPOOSM delivers the lowest and most stable profile. Overall, PPOOSM offers the best latency–energy trade-off, with PPO serving as a strong adaptive baseline that consistently outperforms all fixed strategies.
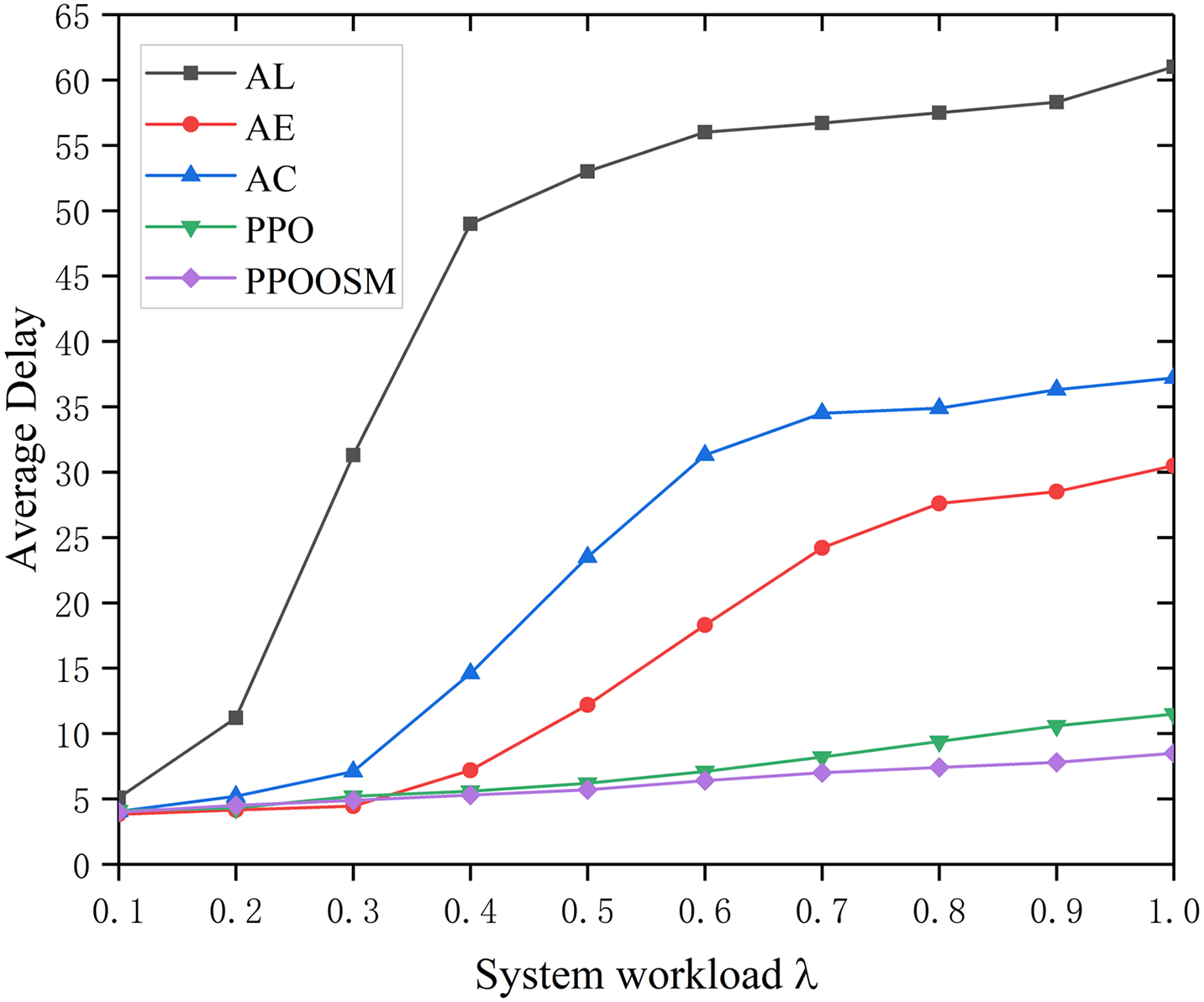
Figure 7: Average delay under different workloads
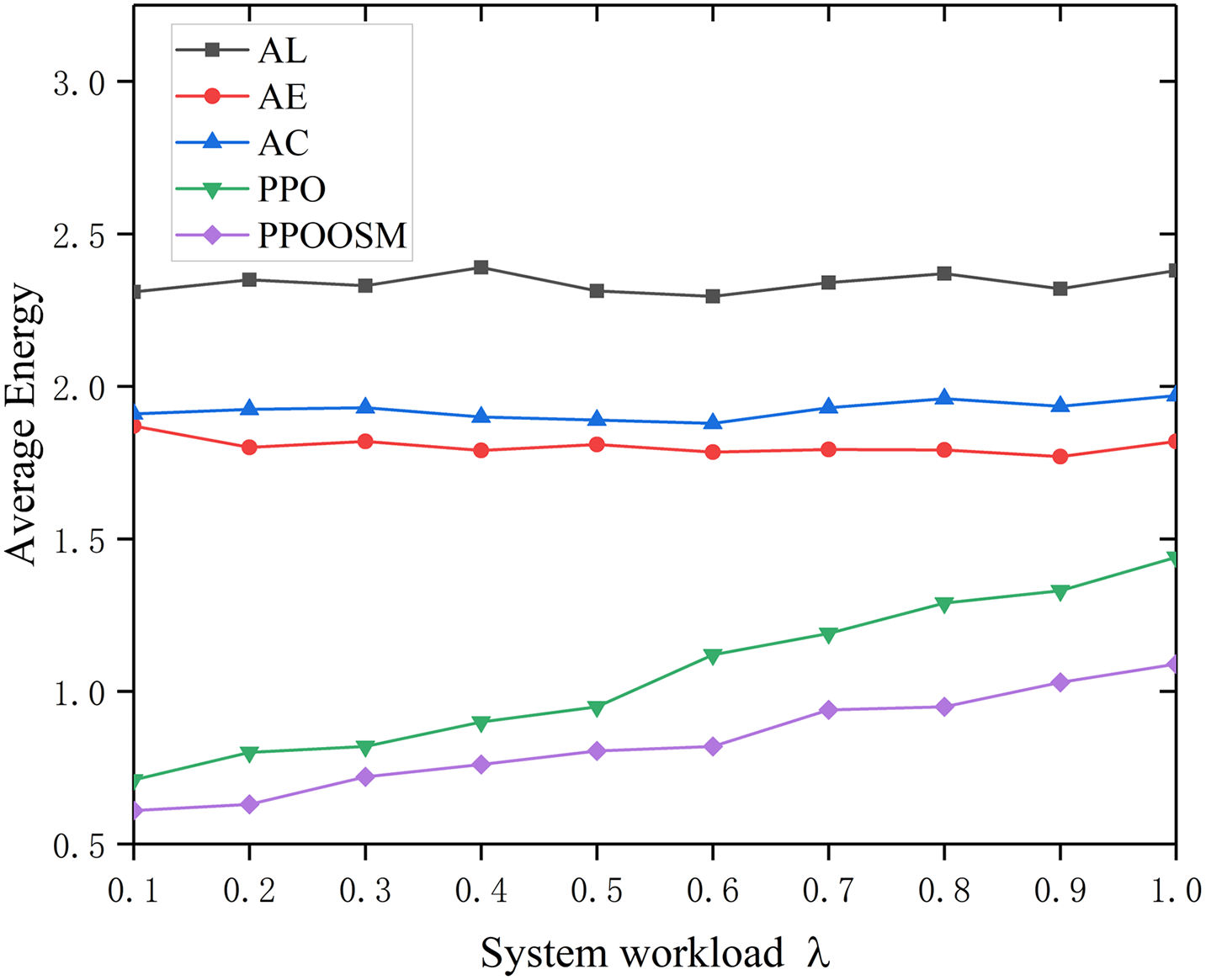
Figure 8: Average energy under different workloads
Fig. 9 charts the composite cost—latency plus energy—against workload intensity λ for five schemes. The three static policies (AL, AE, AC) exhibit the highest and steepest cost growth because they cannot adapt to changing conditions. Vanilla PPO reduces the curve substantially by continuously refining its off-loading policy, yet PPOOSM remains dominant, yielding the lowest cost across the entire workload range. Equipped with a CNN-enhanced state encoder and an α–β-weighted objective, PPOOSM dynamically reallocates tasks in real time, achieving superior multi-objective optimisation in non-stationary edge environments.
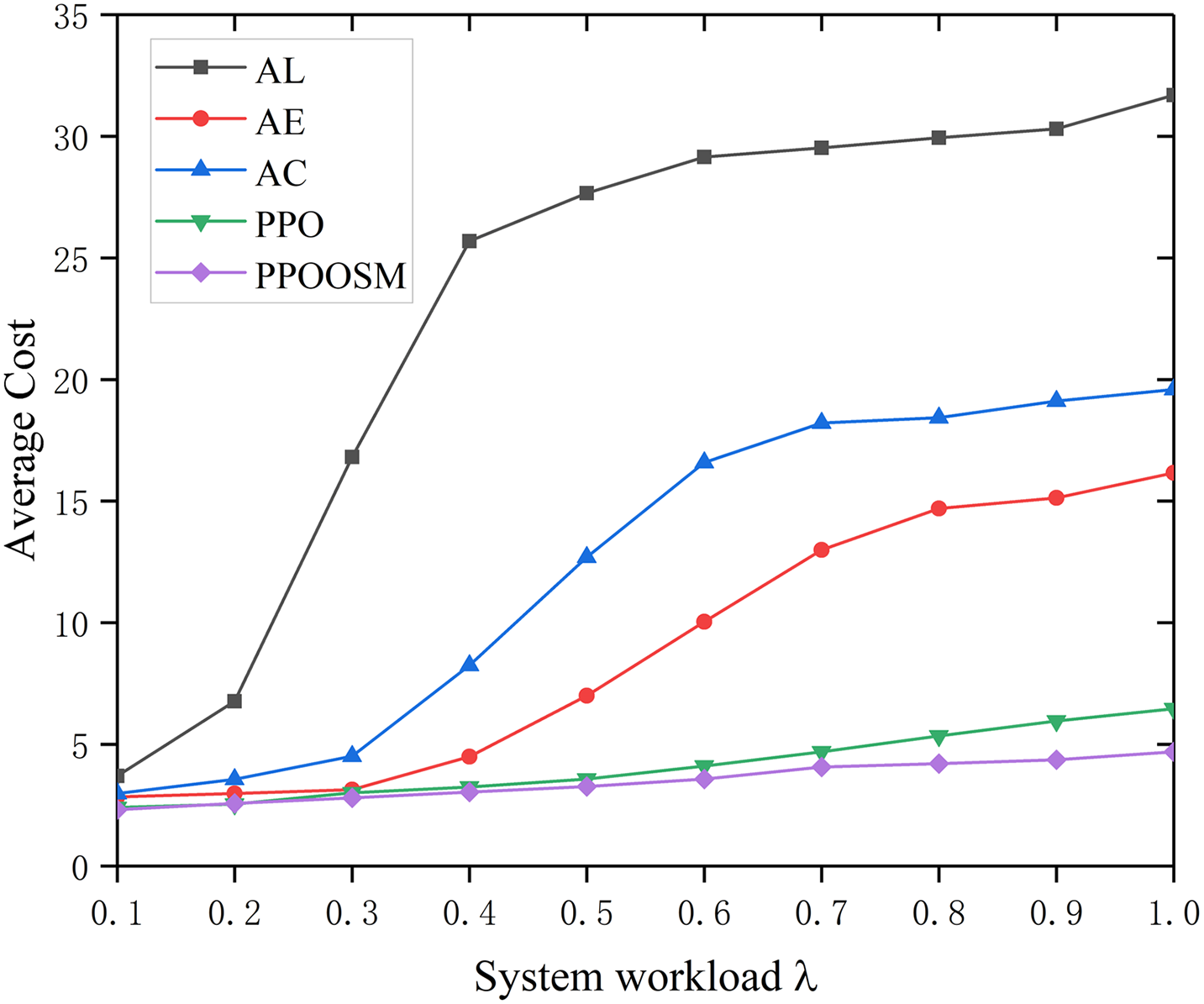
Figure 9: Average cost under different workloads
This paper presents a Proximal-Policy-Optimisation-based Offloading Strategy Model (PPOOSM) that allocates computational resources efficiently for task-offloading in smart-grid environments. By formulating the off-loading problem as a Markov decision process (MDP), the framework integrates deep reinforcement learning through a shared convolutional neural network and a clipped objective function, markedly improving training stability. Extensive simulations demonstrate that, under dynamic off-loading conditions, PPOOSM reduces both latency and energy consumption, outperforming conventional baseline algorithms and heuristic methods. Relative to static allocation strategies, it achieves a more favourable latency–energy trade-off and exhibits superior adaptability and robustness, particularly at high load. These findings confirm the viability of deep reinforcement learning for task-offloading decisions and provide an efficient, flexible solution for real-time scheduling in smart grids, underscoring its significant potential for practical engineering deployment and broad adoption.
Acknowledgement: We would sincerely want to thank the peoples who are supported to do this work and reviewing committee for their estimable feedbacks.
Funding Statement: This work was supported by the National Natural Science Foundation of China (Grant No. 62103349) and the Henan Province Science and Technology Research Project (Grant No. 232102210104).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Ya Zhou, Qian Wang; data collection: Qian Wang; analysis and interpretation of results: Qian Wang; draft manuscript preparation: Qian Wang, Ya Zhou. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The datasets generated or analyzed during the current study are not publicly available due to privacy and confidentiality concerns, but are available from the corresponding author on reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Acarali D, Chugh S, Rao KR, Rajarajan M. IoT deployment and management in the smart grid. In: Ranjan R, Mitra K, Jayaraman PP, Zomaya AY, editors. Managing Internet of Things applications across edge and cloud data centres. London, UK: The Institution of Engineering and Technology; 2024. p. 255–75. doi:10.1049/PBPC027E_ch11. [Google Scholar] [CrossRef]
2. Al-Bossly A. Metaheuristic optimization with deep learning enabled smart grid stability prediction. Comput Mater Contin. 2023;75(3):6395–408. doi:10.32604/cmc.2023.028433. [Google Scholar] [CrossRef]
3. Ahmed RA, Abdelraouf M, Elsaid SA, ElAffendi M, Abd El-Latif AA, Shaalan AA, et al. Internet of Things-based robust green smart grid. Comput. 2024;13(7):169. doi:10.3390/computers13070169. [Google Scholar] [CrossRef]
4. Aminifar F. Evolution in computing paradigms for Internet of Things-enabled smart grid applications. In: Proceedings of the 2024 5th CPSSI International Symposium on Cyber-Physical Systems (Applications and Theory) (CPSAT); 2024 Oct 16–17; Tehran, Iran. doi:10.1109/CPSAT64082.2024.10745414. [Google Scholar] [CrossRef]
5. Arcas GI, Cioara T, Anghel I, Lazea D, Hangan A. Edge offloading in smart grid. arXiv:2402.01664. 2024. [Google Scholar]
6. Li K, Meng J, Luo G, Hou L, Cheng H, Liu M, et al. Fusion-communication MEC offloading strategy for smart grid. Dianli Xinxi Yu Tongxin Jishu. 2024;22(6):10–7. (In Chinese). doi:10.16543/j.2095-641X.electric.power.ict.2024.06.02. [Google Scholar] [CrossRef]
7. Liu M, Tu Q, Wang Y, Meng S, Zhao X. Research status of mobile cloud computing offloading technology and its application in the power grid. Dianli Xinxi Yu Tongxin Jishu. 2021;19(1):49–56. (In Chinese). doi:10.16543/j.2095-641X.electric.power.ict.2021.01.007. [Google Scholar] [CrossRef]
8. Zhang N, Li WJ, Liu Z, Li Z, Liu YM, Nahar N. A new task scheduling scheme based on genetic algorithm for edge computing. Comput Mater Contin. 2022;71(1):843–54. doi:10.32604/cmc.2022.017504. [Google Scholar] [CrossRef]
9. Han X, Dai J, Wang Y. Research on edge computing-oriented resource-aware access and intelligent gateway technology for power transmission, transformation and distribution. In: Proceedings of the 2023 International Conference on Applied Intelligence and Sustainable Computing (ICAISC); 2023 Jun 16–17; Dharwad, India. p. 1–6. doi:10.1109/ICAISC58445.2023.10199983. [Google Scholar] [CrossRef]
10. Wei H, Guan Y, Zhao Q, Zhang T, Liu J, Zhang H. A novel distributed computing resource operation mechanism for edge computing. In: Proceedings of the 2023 9th International Conference on Computer and Communications (ICCC); 2023 Dec 8–11; Chengdu, China. p. 2593–8. doi:10.1109/ICCC59590.2023.10507521. [Google Scholar] [CrossRef]
11. Dong S, Tang J, Abbas K, Hou R, Kamruzzaman J, Rutkowski L, et al. Task offloading strategies for mobile edge computing: a survey. Comput Netw. 2024;254(6):110791. doi:10.1016/j.comnet.2024.110791. [Google Scholar] [CrossRef]
12. Park S, Kwon D, Kim J, Lee YK, Cho S. Adaptive real-time offloading decision-making for mobile edges: deep reinforcement learning framework and simulation results. Appl Sci. 2020;10(5):1663. doi:10.3390/app10051663. [Google Scholar] [CrossRef]
13. Peng P, Lin W, Wu W, Zhang H, Peng S, Wu Q, et al. A survey on computation offloading in edge systems: from the perspective of deep reinforcement learning approaches. Comput Sci Rev. 2024;53(5):100656. doi:10.1016/j.cosrev.2024.100656. [Google Scholar] [CrossRef]
14. Zhu C, Xia L, Qin C. Research progress and prospects of deep reinforcement learning in the field of mobile edge computing. In: Ning Z, Xiong Z, editors. Proceedings of the Fifth International Conference on Computer Communication and Network Security (CCNS 2024); 2024 May 3–5; Guangzhou, China. p. 1322813. doi:10.1117/12.3038174. [Google Scholar] [CrossRef]
15. Gao Z, Wu G, Shen Y, Zhang H, Shen S, Cao Q. DRL-based optimization of privacy protection and computation performance in MEC computation offloading. In: IEEE INFOCOM 2022—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS); 2022 May 2–5; Online. p. 1–6. doi:10.1109/INFOCOMWKSHPS54753.2022.9797993. [Google Scholar] [CrossRef]
16. Alfa AS, Maharaj BT, Lall S, Pal S. Resource allocation techniques in underlay cognitive radio networks based on mixed-integer programming: a survey. J Commun Netw. 2016;18(5):744–61. doi:10.1109/JCN.2016.000104. [Google Scholar] [CrossRef]
17. Wei F, Chen S, Zou W. A greedy algorithm for task offloading in mobile edge computing system. China Commun. 2018;15(11):149–57. doi:10.1109/CC.2018.8543056. [Google Scholar] [CrossRef]
18. Umair M, Saeed Z, Saeed F, Ishtiaq H, Zubair M, Hameed HA. Energy theft detection in smart grids with genetic algorithm-based feature selection. Comput Mater Contin. 2023;74(3):5431–46. doi:10.32604/cmc.2023.033884. [Google Scholar] [CrossRef]
19. Wang J, Xia H, Xu L, Zhang R, Jia K. DRL-based latency-energy offloading optimization strategy in wireless VR networks with edge computing. Comput Netw. 2025;258:111034. doi:10.1016/j.comnet.2025.111034. [Google Scholar] [CrossRef]
20. Wang T, Deng Y, Yang Z, Wang Y, Cai H. Parameterized deep reinforcement learning with hybrid action space for edge task offloading. IEEE Internet Things J. 2024;11(6):10754–10767. doi:10.1109/JIOT.2023.3327121. [Google Scholar] [CrossRef]
21. Li H, Liu L, Duan X, Li H, Zheng P, Tang L. Energy-efficient offloading based on hybrid bio-inspired algorithm for edge-cloud integrated computation. Sustain Comput Inform Syst. 2024;42(11):100972. doi:10.1016/j.suscom.2024.100972. [Google Scholar] [CrossRef]
22. Wang W, Yang L, Long T, Zhang X, Zhang M. Mobile edge computing task offloading method for the power Internet of Things. In: Proceedings of the 2024 IEEE 7th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC); 2024 Sep 20–22; Chongqing, China. p. 118–22. doi:10.1109/ITNEC60942.2024.10733102. [Google Scholar] [CrossRef]
23. Cui J, Li Y, Yang H, Wei Y, Liu W, Ji C, et al. Quota matching-based task offloading for WSN in smart grid. In: Proceedings of the 2022 7th International Conference on Electronic Technology and Information Science (ICETIS 2022); 2022 Jan 21–23; Harbin, China. p. 1–4. [Google Scholar]
24. Hu J, Li Y, Zhao G, Xu B, Ni Y, Zhao H. Deep reinforcement learning for task offloading in edge computing assisted power IoT. IEEE Access. 2021;9:93892–901. doi:10.1109/ACCESS.2021.3092381. [Google Scholar] [CrossRef]
25. Zhou H, Zhang Z, Li D, Su Z. Joint optimization of computing offloading and service caching in edge computing-based smart grid. IEEE Trans Cloud Comput. 2023;11(2):1122–32. doi:10.1109/TCC.2022.3163750. [Google Scholar] [CrossRef]
26. Nimkar S, Khanapurkar MM. Design of a Q-learning based smart grid and smart water scheduling model based on heterogeneous task specific offloading process. In: Proceedings of the 2022 International Conference on Smart Generation Computing, Communication and Networking (SMART GENCON); 2022 Dec 23–25; Bangalore, India. p. 1–9. doi:10.1109/SMARTGENCON56628.2022.10084189. [Google Scholar] [CrossRef]
27. Li H, Xiong K, Lu Y, Chen W, Fan P, Letaief KB. Collaborative task offloading and resource allocation in small-cell MEC: a multi-agent PPO-based scheme. IEEE Trans Mob Comput. 2025;24(3):2346–59. doi:10.1109/TMC.2024.3496536. [Google Scholar] [CrossRef]
28. Mustafa E, Shuja J, Rehman F, Namoun A, Bilal M, Iqbal A. Computation offloading in vehicular communications using PPO-based deep reinforcement learning. J Supercomput. 2025;81(4):547. doi:10.1007/s11227-025-07009-z. [Google Scholar] [CrossRef]
29. Goudarzi M, Palaniswami M, Buyya R. A distributed deep reinforcement learning technique for application placement in edge and fog computing environments. IEEE Trans Mob Comput. 2023;22(5):2491–505. doi:10.1109/TMC.2021.3123165. [Google Scholar] [CrossRef]
30. Dinh TQ, Tang J, La QD, Quek TQS. Offloading in mobile edge computing: task allocation and computational frequency scaling. IEEE Trans Commun. 2017;65(8):3571–84. doi:10.1109/TCOMM.2017.2699660. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools