
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Proactive Disentangled Modeling of Trigger–Object Pairings for Backdoor Defense
1 Department of Intelligent Systems and Robotics, University of West Florida, Pensacola, FL 32514, USA
2 Florida Institute for Human and Machine Cognition (IHMC), Pensacola, FL 32502, USA
3 Center for Cybersecurity, University of West Florida, Pensacola, FL 32502, USA
* Corresponding Author: Kyle Stein. Email:
(This article belongs to the Special Issue: Towards Privacy-preserving, Secure and Trustworthy AI-enabled Systems)
Computers, Materials & Continua 2025, 85(1), 1001-1018. https://doi.org/10.32604/cmc.2025.068201
Received 23 May 2025; Accepted 11 July 2025; Issue published 29 August 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Deep neural networks (DNNs) and generative AI (GenAI) are increasingly vulnerable to backdoor attacks, where adversaries embed triggers into inputs to cause models to misclassify or misinterpret target labels. Beyond traditional single-trigger scenarios, attackers may inject multiple triggers across various object classes, forming unseen backdoor-object configurations that evade standard detection pipelines. In this paper, we introduce DBOM (Disentangled Backdoor-Object Modeling), a proactive framework that leverages structured disentanglement to identify and neutralize both seen and unseen backdoor threats at the dataset level. Specifically, DBOM factorizes input image representations by modeling triggers and objects as independent primitives in the embedding space through the use of Vision-Language Models (VLMs). By leveraging the frozen, pre-trained encoders of VLMs, our approach decomposes the latent representations into distinct components through a learnable visual prompt repository and prompt prefix tuning, ensuring that the relationships between triggers and objects are explicitly captured. To separate trigger and object representations in the visual prompt repository, we introduce the trigger–object separation and diversity losses that aids in disentangling trigger and object visual features. Next, by aligning image features with feature decomposition and fusion, as well as learned contextual prompt tokens in a shared multimodal space, DBOM enables zero-shot generalization to novel trigger-object pairings that were unseen during training, thereby offering deeper insights into adversarial attack patterns. Experimental results on CIFAR-10 and GTSRB demonstrate that DBOM robustly detects poisoned images prior to downstream training, significantly enhancing the security of DNN training pipelines.Keywords
As deep neural networks (DNNs) become more prevalent in applications such as natural language processing [1–3] and object classification [4–6], they are increasingly being targeted by sophisticated security threats [7,8]. The rise of generative AI [9–11] has enabled the large-scale creation of datasets sourced from online repositories. Although these datasets improve model robustness, they often bypass rigorous vetting, making them vulnerable to backdoor attacks [12–15]. Such attacks embed hidden triggers in training samples, causing models to misclassify inputs containing the trigger, for example, altering a stop sign’s label to a speed limit sign.
Recent work has focused on identifying backdoored samples in pre-trained infected models [16–19], but less attention has been given to proactively scanning training data for suspicious triggers before the final model is trained. This lack of focus on the dataset creation phase represents a significant gap in input-level backdoor defense strategies [20–23]. Malicious triggers can be embedded in training samples well before the model is exposed to them, undermining the integrity of the entire training process. Addressing this stage early in the pipeline not only prevents contaminated data from infiltrating the training process, but also reduces the computational costs associated with post-training purification efforts [24,25]. Lastly, proactively analyzing the dataset offers deeper insights into the adversarial logic behind these backdoors, specifically how triggers interact with objects and how attackers strategically embed them to exploit vulnerabilities.
Although existing defenses can detect single or multiple backdoor triggers in a compromised data set [26–30], they remain strictly trigger-centric, where flagged samples are discarded, and images of objects classes bearing those triggers are ignored. This removes valuable co-occurrence information into how specific triggers map onto particular objects, which could expose systematic attacker strategies. In realistic many-to-many attack scenarios [31], where adversaries plant various triggers across a wide range of object categories, a trigger-only approach would fail to recognize novel trigger-object combinations outside of its training set of known trigger–object pairings. For instance, assume a square-patch trigger is only ever seen on stop signs and a pixel-noise trigger only on speed-limit signs. If an attacker then applies that same square patch to yield signs or the pixel noise to pedestrian-crossing signs (pairings never observed before) those trigger-centric detectors may sharply degrade in performance, since they do not explicitly model which object the trigger appears on. By contrast, a co-occurrence-aware model that simultaneously identifies both triggers and object classes preserves the relational context between adversarial triggers and their targets. Rather than excluding compromised samples, this approach leverages modular relationships to learn comprehensive backdoor patterns and infer previously unseen trigger–object combinations. As a result, the model can accurately recognize the underlying object despite the presence of a trigger, integrate attacked examples into both training and inference workflows, and reduce false positives by distinguishing benign from malicious features. Moreover, modeling trigger–object relationships provides deeper forensic insights into attacker tactics, enabling dynamic update strategies that proactively defends models against evolving many-to-many backdoor attacks. Overall, we can summarize that existing input-level defenses in current state-of-the-art (SOA) attack scenarios remain strictly trigger-centric, where: (1) they identify and discard adversarial samples, losing the underlying object semantics and missing the opportunity to reveal adversarial strategies, (2) do not focus on concurrently identifying triggers and the associated object class, and (3) fail to generalize to novel trigger-object pairings.
To address these gaps, we present Disentangled Backdoor-Object Modeling (DBOM), a proactive framework based on VLMs and prompt tuning [9], designed to identify and isolate unseen backdoor-object configurations. Instead of inspecting a potentially compromised model, this approach focuses on learning trigger-object configurations within web-scraped training images before they are ever fed into a downstream model. Our method surpasses current SOA pre-training defense algorithms by detecting not only the types of backdoor triggers in compromised datasets, but also the underlying objects they target, thereby capturing the adversarial logic behind these malicious trigger–object pairings. Here, we define a trigger as the backdoor attack pattern embedded into an image and an object as the benign semantic class being manipulated. DBOM then factorizes these two primitives into independent embeddings (Fig. 1), enabling modular representations of trigger–object configurations [32]. Furthermore, by capturing the relationship among triggers and objects during training, previously unseen trigger-object pairings can be detected during inference, a problem traditional single-trigger detection pipelines overlook. The contributions of our approach are as follows:
• We introduce DBOM, a novel end-to-end disentangled representation learning framework that separates triggers and objects into independent latent visual primitives. By leveraging cross-modal attention for structured latent decomposition, DBOM aims to learn each trigger pattern and each object class in isolation. At inference, it recomposes these known trigger and object embeddings to recognize combinations never seen during training, achieving zero-shot generalization over trigger–object pairings and resulting in a robust method against adaptive backdoor strategies.
• Our approach incorporates a dual-branch module that features a learnable visual prompt repository along with a dynamic soft prompt prefix adapter for prompt tuning. The use of a learnable visual prompt repository allows us to capture primitive-specific features for both triggers and objects, aiding in feature disentanglement. Furthermore, dynamically tuning text prompt representations based on image content, our module enhances the semantic context of each sample and improves the separation between trigger and object features. This design allows the framework to capture diverse trigger patterns across multiple object classes, overcoming the limitations of conventional defenses that assume a single, static trigger per dataset.
• By integrating a proactive backdoor detection mechanism into the data curation process, DBOM identifies unseen backdoor-object attacks before downstream model training begins. A composite loss function that minimizes cross-entropy, disentanglement, and prompt alignment losses together ensures that poisoned samples are identified and isolated for removal from the dataset.
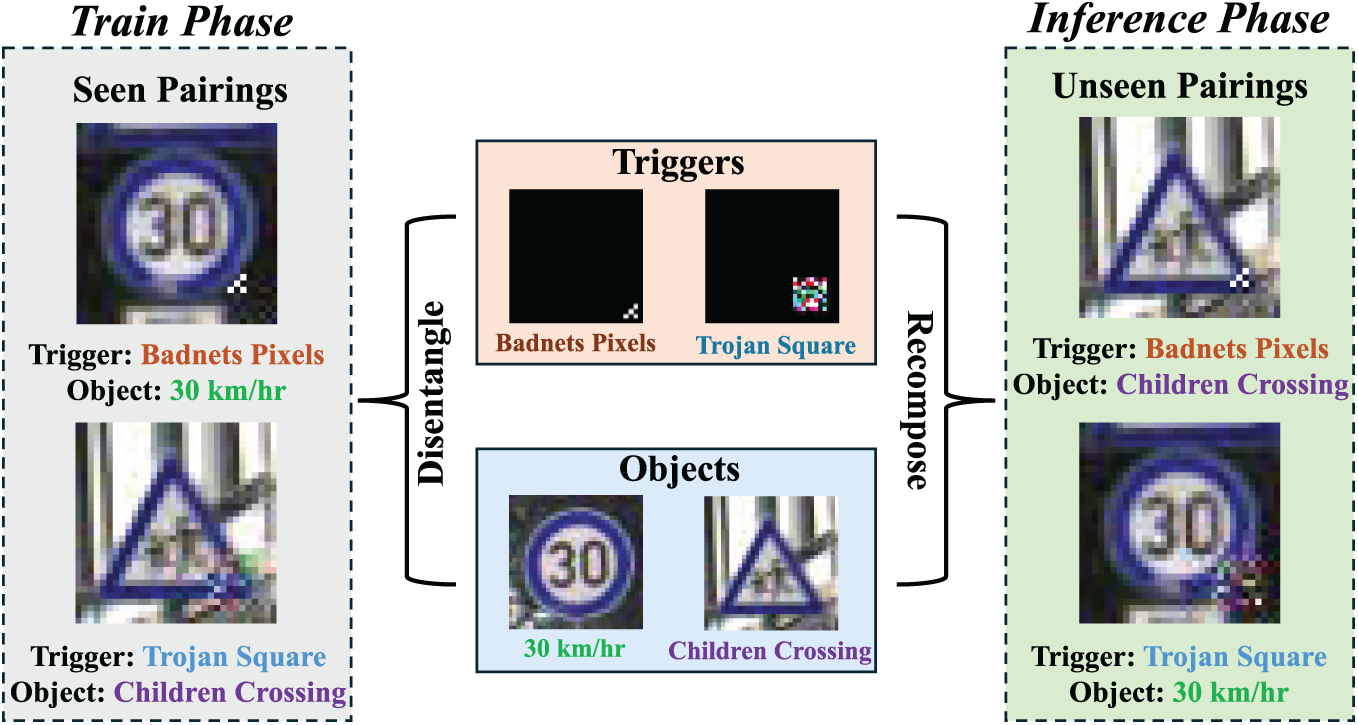
Figure 1: Overview of our disentangling process for trigger–object pairings. During training, the system learns separate representations of triggers and objects. By factorizing these components, the model can generalize to unseen trigger–object configurations, although they were never observed together during training
Disentanglement involves separating visual primitives of images into independent components [33–37]. A central strategy for addressing this task is to train models that learn these independent components and recombine them in novel ways, thereby enabling the flexible recognition of previously unseen trigger–object pairings. Li et al. [14] apply symmetry and group theory to model primitive relationships, introducing a novel distance function. A Siamese Contrastive Embedding Network (SCEN) [38] embeds visual features into a contrastive space to separately model primitive diversity. A retrieval-augmented approach improves recognition of unseen primitive component pairings by retrieving and refining representations [39]. Recent methods integrate vision-language models (VLMs) such as CLIP [9] to enhance the recognition of structured relationships between the underlying nature of images and text prompts. Compositional Soft Prompting (CSP) [40] utilizes a static prompt prefix alongside learned primitive embeddings, with predictions based on cosine similarity between text and image features. Later works remove the static prefix, making the entire prompt learnable [41,42]. In the context of DBOM, disentangling triggers and objects allows our model to factor visual embeddings into two primitive subspaces: one that captures adversarial trigger patterns and one that encodes the class object semantics. Once these primitives are learned, unseen trigger-object pairings can be inferred upon during testing.
Backdoor Attacks became prominent with the introduction of Badnets [12]. Badnets demonstrated how adversaries can embed backdoors into DNNs by poisoning the training data with trigger-patterned images, such as a single white square or pixelated patterns, to misclassify inputs. Liu et al. [13] introduced trojaning attacks, which differ from Badnets, by reverse-engineering neuron activations to generate adversarial triggers that maximize activations in specific neurons. Li et al. [43] explored techniques to make triggers more covert to detection by implementing steganographic embedding, where backdoor triggers are hidden within images at a pixel level. Recent backdoor attacks include Wanet [15], a warping-based trigger, which introduces imperceptible image distortions as triggers instead of traditional noise perturbations.
Backdoor Defenses mostly operate in the adversarial machine learning life-cycle at the model level, leaving the dataset vetting process largely unexplored [44]. Several works attempt to filter adversarial images before training [20–22,29], but these rely on detecting known trigger-object configurations and fail to generalize to unseen pairings. VisionGuard [21] compares the softmax outputs of original and transformed images using metrics like the Kullback–Leibler divergence to detect attacks without altering the target network. Deep k-NN [20] leverages deep feature space clustering and k-nearest neighbor voting to detect and remove poisoned images from the training set prior to downstream model training. HOLMES [22] employs multiple external detectors trained on both dedicated labels and top-k logits to capture subtle differences between benign and adversarial inputs. Traditional backdoor defenses assume a compromised model and attempt to mitigate attacks post-training [17–19]. However, these techniques reactively address attacks after deployment by cleaning the model, whereas our approach proactively filters poisoned images before they enter the downstream training pipeline, preventing backdoor contamination at its source. Furthermore, these methods overlook the opportunity to identify unseen trigger–object configurations that were not seen in their model training, which is addressed in this paper.
3.1 Trigger-Object Representation
We define a backdoor configuration as a pairing of a trigger and an object, where the trigger serves as the adversarial modification and the object represents the underlying semantic class being targeted (e.g., “stop sign,” “yield sign,” “airplane”). Let T be the set of all possible triggers, and O be the set of object categories, where
3.2 Threat Model and Defender Goals
Threat Model. We assume an adversary injects backdoor attacks based on trigger–object pairings into a web-scraped or publicly available dataset used for training a downstream DNN. The goal is to cause the model to misclassify inputs containing triggers into a target label while maintaining normal classification on clean images. Since large datasets are rarely vetted on a per-sample basis, malicious samples blend easily with clean data. Furthermore, attackers can escalate this threat by injecting multiple triggers across different classes, including novel, unseen trigger–object pairings, so that conventional defenses which expect a single static trigger fail to detect them. Consequently, the compromised data is used in downstream training, embedding hidden adversarial behaviors into the final model.
Defender’s Goal. The defender’s goal is to identify backdoored images prior to downstream model training, ensuring they are isolated while minimizing the misclassification of clean images. Given a potentially poisoned dataset that contains several triggers–object configurations, the defender must distinguish legitimate images from those carrying triggers. Furthermore, by concurrently identifying both the trigger and the underlying object, the defender learns vital information into the adversary’s strategies. Moreover, separating the adversarial trigger from the underlying object enables the recovery of correct object semantics in backdoored samples, eliminating the need to discard these adversarial samples from training or inference.
DBOM leverages CLIP as its backbone by freezing its pre-trained visual and text encoders. Let
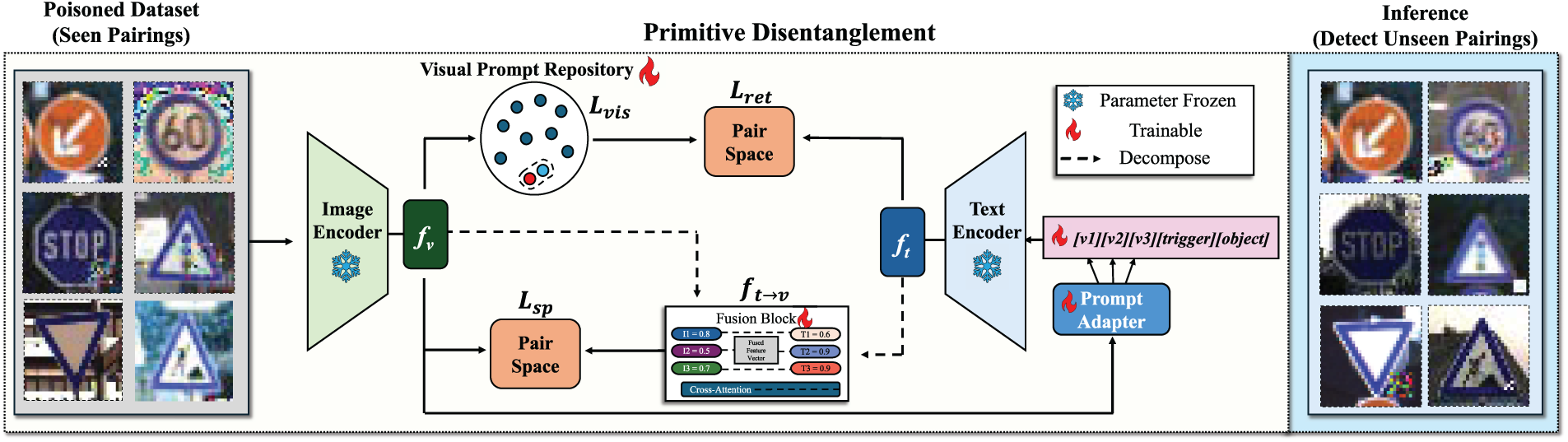
Figure 2: DBOM utilizes a visual prompt repository and a similarity-based retrieval mechanism to detect unseen backdoor trigger-object representations through the use of CLIP’s pre-trained visual and textual encoders. During training, each image retrieves visual prompts from the repository, shifts a learnable text prefix with a prompt adapter, and fuses decomposed image–text features via cross-attention. During inference, the framework again retrieves the top visual prompts, shifts the text prompt for each new image, and computes similarity scores to pinpoint unseen trigger-object pairings. Lastly, in separate pair spaces, the logits are computed by comparing the fused image–text features with the visual features from the frozen visual encoder, as well as the selected visual prompts and the text features from the frozen text encoder. The highest-scoring trigger–object pair is then selected as the predicted configuration. By detecting malicious seen and unseen configurations in this way, DBOM identifies backdoored configurations and isolates them for removal prior to downstream model training
The visual prompt repository comprises a collection of M learnable visual prompts
Because our primary objective is to accurately flag backdoored images, the loss function prioritizes the trigger key by encouraging it to achieve a higher similarity score than the object key, with the object serving as complementary context for the image. The visual prompt diversity loss is defined as:
where
which guides the prompts to distinctly capture trigger and object characteristics. During training, the visual prompt repository is updated end-to-end with
Traditional prompt tuning approaches [9,40,46] use a fixed soft prompt prefix, where a sequence such as [trigger][object] is appended with an initialized phrase a photo of. This means that the same prefix is applied to every sample, regardless of the unique characteristics of the trigger or object in the image. This prefix rigidity can hinder the system’s ability to accurately distinguish between different trigger–object pairs. Motivated by the work in [46], we propose an adaptive prompt network module that dynamically adjusts the learnable prefix tokens based on the visual content of the input image. This has been shown to transfer the frozen backbone’s generalization power to entirely new tasks with very few labeled examples [46–48].
Specifically, the prompt adapter utilizes the image features
where
4.3 Feature Decomposition and Fusion
To disentangle and jointly embed the representations of triggers and objects for backdoor detection, we decompose and then fuse the visual features,
Formally, we compute the trigger and object probabilities as follows:
where
where
Next,
where
Our framework trains in two main stages: we first adapt the soft prompt so that the fused features
Minimizing the cross-entropy over these probabilities yields the soft prompt alignment loss
Minimizing the cross-entropy over these probabilities produces the retrieval alignment loss
During inference, the learned prompt adapter shifts the prefix tokens, the visual prompts are retrieved and averaged, and the logits are computed based on the similarity between the image and text features in the pair space. The predicted trigger–object text labels are selected by:
where
Attacks and Splits. We conduct experiments using two benchmark datasets: CIFAR-10 [49] and GTSRB [50]. CIFAR-10 contains 50,000 training images and 10,000 test images across 10 object classes, while GTSRB consists of 39,209 training images and 12,630 test images spanning 43 traffic sign classes. Recent studies [21,51] have shown that adversaries can place backdoor triggers directly on traffic signs to mislead advanced driver-assistance and autonomous-driving systems. Therefore, GTSRB provides a practical, safety-critical testbed for evaluating our proposed data-level defense system. To introduce backdoor vulnerabilities, we generate contaminated versions of all clean images using six attack patterns, while retaining the clean images themselves as an individual class. The six widely recognized backdoor attacks which are employed are: Badnets Square (Badnets-SQ) [12], Badnets Pixels (Badnets-PX) [12], Trojan Square (Trojan-SQ) [13], Trojan Watermark (Trojan-WM) [13],
Implementation Details. We utilize PyTorch 1.12.1 [52] for the implementation of our model. The model is optimized using the Adam optimizer [53] and is trained over 20 epochs on the previously mentioned datasets. Both the image encoder and text encoder are based on the pretrained CLIP ViT-L/14 model, and the entire model is trained and evaluated on a single NVIDIA 2080 Ti GPU. We set
5.2 Unseen Trigger–Object Evaluation
This experiment evaluates the performance of DBOM in both the seen (S) and unseen (U) trigger–object pairing scenarios. Specifically, the accuracy for each trigger–object pairing type is measured, assessing both the Attack (trigger) and Object classifications separately. To provide a comprehensive evaluation, we report the Harmonic Mean (HM) of the seen and unseen accuracies, which balances performance across known and novel pairings. In addition, we calculate the area under the curve (AUC), which serves as the primary metric for assessing the overall effectiveness of the model in detecting trigger-object configurations. We compare DBOM’s results with CoOP [46] and CSP [40] since they represent two distinct approaches for leveraging CLIP in modeling triggers and objects as separate primitives in the embedding space. CoOP uses fixed, pre-computed natural language representations for the triggers and objects while learning only a context prompt prefix to condition CLIP. In contrast, CSP learns soft prompts by fine-tuning learnable tokens for triggers and objects, allowing for more adaptive reconfiguration and improved generalization to unseen trigger–object pairings.
Table 1 demonstrates that DBOM outperforms the baseline methods across nearly all metrics. DBOM improves AUC over 53% on GTSRB and nearly 43% on CIFAR-10. Furthermore, DBOM successfully identifies over 98% of backdoor triggers on both benchmarks while classifying nearly 95% of objects in the diverse GTSRB dataset (43 classes) and over 95% on CIFAR-10 (10 classes). Importantly, the high accuracy observed for unseen trigger-object pairings indicates that our model can detect trigger-object pairings that were not encountered during training. Note that DBOM not only generalizes to unseen trigger–object pairings, it also accurately identifies seen triggers: the “Seen” columns in Table 1 show over 92 and 96% accuracy on known trigger patterns.

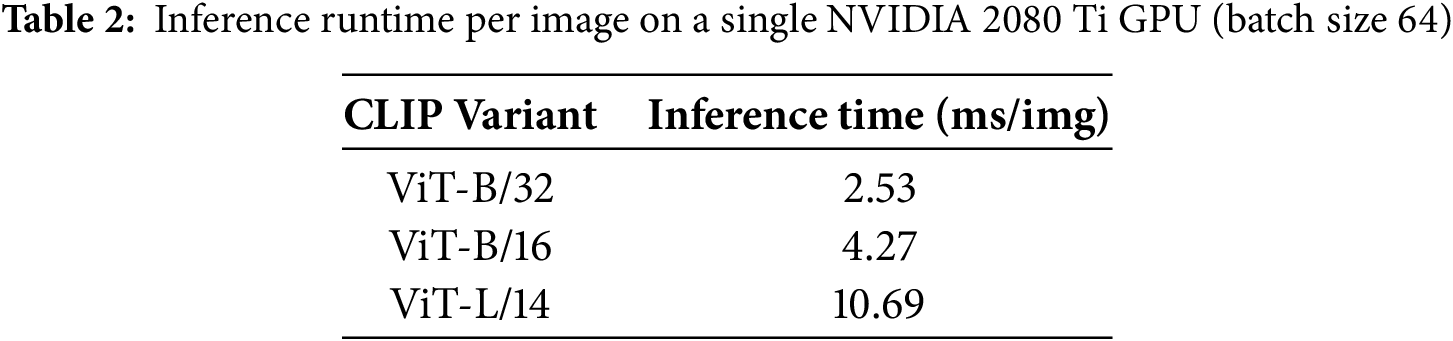
Moreover, we report the results of smaller CLIP variants in Table 1 and average run-times across both datasets for each variant in Table 2. We can observe that the ViT-B/32 and ViT-B/16 models run at an average of 2.53 ms and 4.27 ms/image, compared to ViT-L/14’s 10.69 ms/image, respectively. Importantly, this reduction in compute does not result in a significant drop in accuracy: the ViT-B/32–based DBOM still achieves AUC scores of 85.03% on GTSRB and 84.43% on CIFAR-10, while the ViT-B/16 variant increases those figures to 87.86% and 87.37%. These findings suggest that our approach can leverage smaller CLIP backbones for real-time deployment without sacrificing the high trigger-object identification performance afforded by the larger variant.
Overall, DBOM’s zero-shot generalization capability to novel trigger–object pairings is achieved by leveraging the disentangled representation learning approach, which factors triggers and objects into independent primitives. Although previous methods aim for similar generalization, our visual prompt repository, dynamic prefix adapter, feature decomposition and fusion greatly improve the ability to recombine these learned representations to accurately identify novel trigger-object pairings. Therefore, DBOM offers robust protection against evolving backdoor attack strategies by possessing the ability to identify seen configurations with high accuracy and then leveraging those seen pairings to identify unseen configurations, resulting in an adaptive method that can simultaneously evolve to adversarial strategies.
5.3 Backdoor Poison Detection Evaluation
DBOM is compared against conventional pre-training dataset cleaning approaches [20–22] by simulating a realistic scenario where the poisoning rate is set at 5%, 10%, and 15%, reflecting the poisoning ratios often encountered in web-scraped datasets. Overall accuracy (Acc.) measures the proportion of all images, both clean and poisoned, that are correctly classified. Futhermore, we report the attack recall (Rec.), indicating the percentage of poisoned images that are successfully identified. Additionally, attack precision (Prec.) measures the proportion of images flagged as attacked that are truly poisoned, and the F1 Attack score is the harmonic mean of attack precision and recall. Table 3 summarizes the performance of DBOM relative to baseline methods.
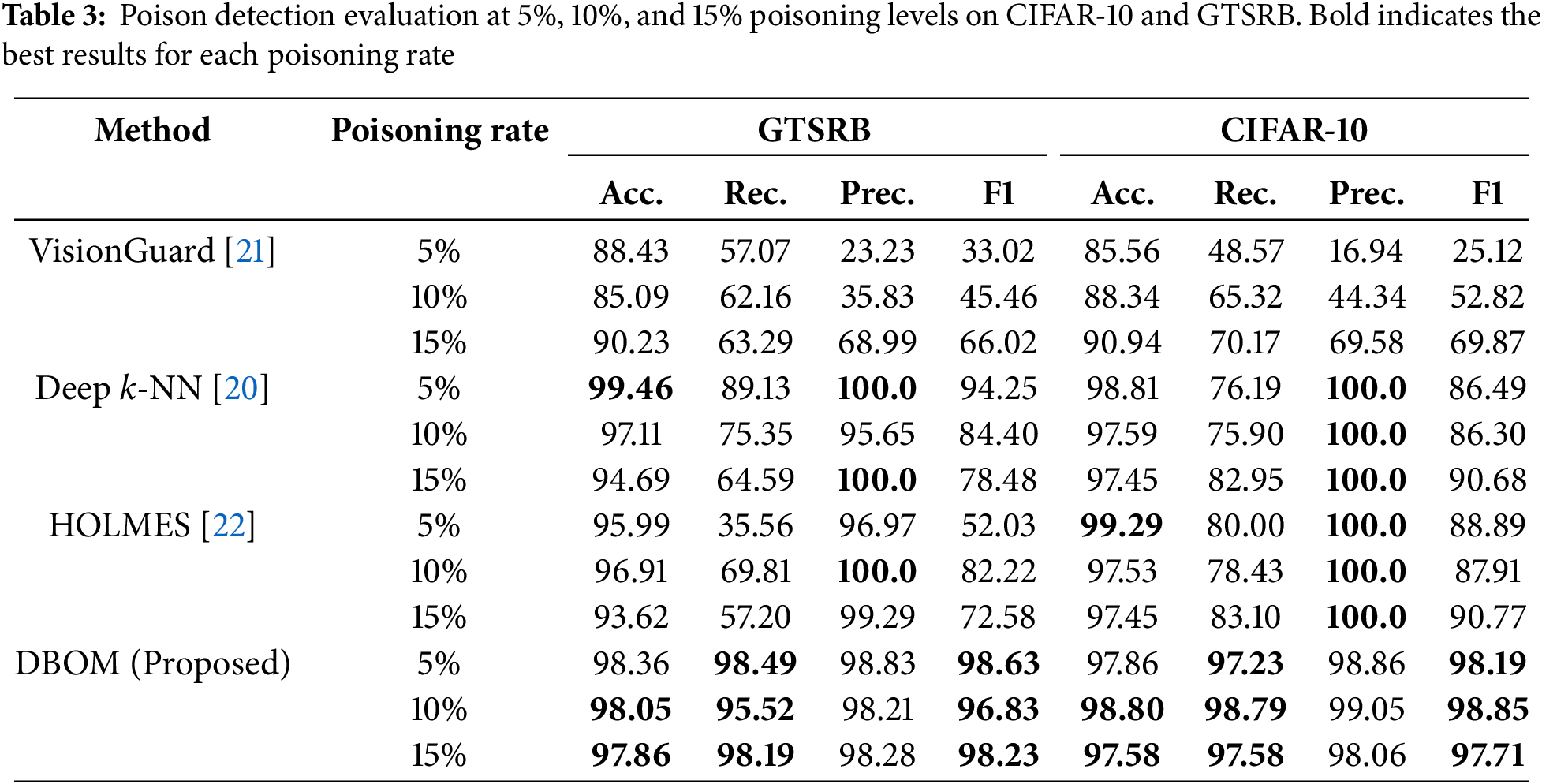
Evaluation shows that DBOM consistently results in high overall accuracy while keeping the misclassification of clean samples to a minimum. For example, on GTSRB, DBOM achieves overall accuracies of around 98% with an attack recall consistently exceeding 97% and F1 scores near 98% across poisoning rates of 5%–15%. Similar trends are observed on CIFAR-10, where overall accuracies are in the range of 97%–98%, and both attack recall and F1 scores remain high. Furthermore, our experimental results reveal an important trade-off between precision and recall. While methods such as Deep k-NN and HOLMES achieve near perfect precision, they often suffer from lower attack recall (typically around 75%–80%), leading to significantly lower F1 scores. DBOM’s modest decrease in precision is acceptable because missing a poisoned image can be far more harmful than incorrectly flagging a few additional clean images, especially when clean images make up the majority of the dataset. Lastly, unlike existing SOA methods that solely focus on identifying whether an image is backdoored or poisoned, DBOM disentangles each image’s representations into primitives to identify both the trigger and the object concurrently, thereby enabling it to detect unseen configurations that were not encountered during training, a crucial improvement over existing SOA methods.
Impact of
The results, shown in in Fig. 3, reveal that at
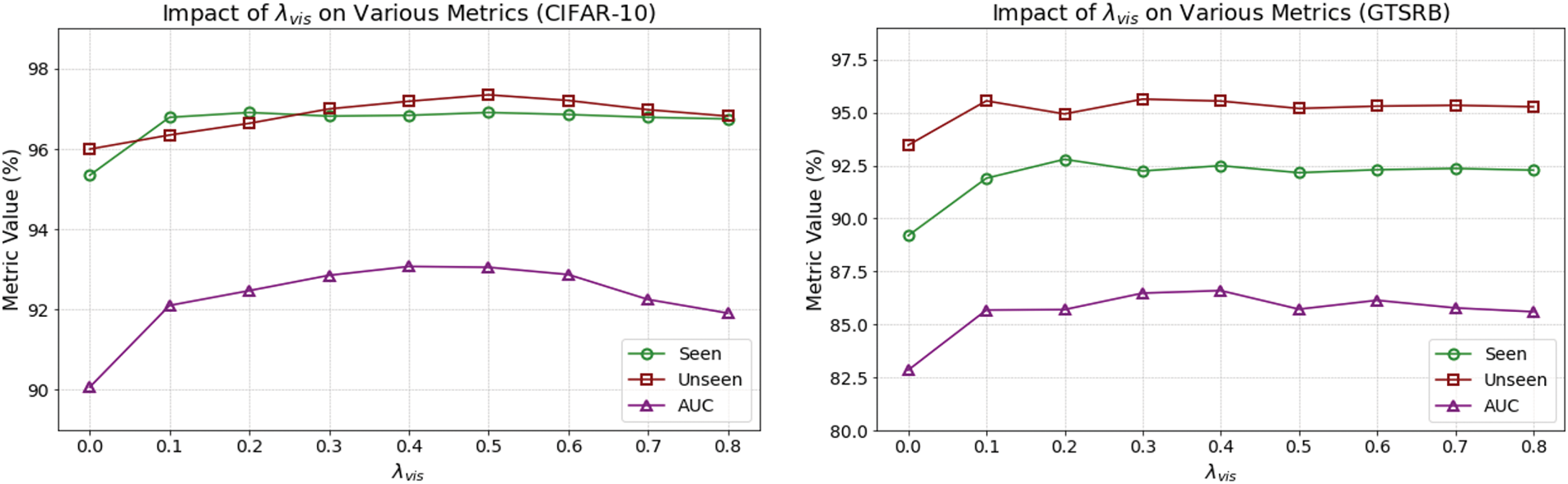
Figure 3: Impact of
Learnable vs. Static Prefix. In this experiment, we replace the learnable soft prompt adapter with a static fixed prompt prefix, a photo of, to isolate the influence of a constant prefix context on model performance. Table 4 details the performance improvement across all metrics of the learnable prefix adapter over the fixed prefix. For GTSRB, the learnable prefix leads to a 5.07% increase in object classification accuracy, AUC 3.31% and seen accuracy 2.19%. This improvement is especially significant for object classification, given that GTSRB has a diverse set of 43 classes, making the task more challenging. Similarly, on CIFAR-10, we see a notable 1.59% increase on unseen pairings, 1.38% for object classification, and 1.92% for AUC. The improvements can be attributed to dynamically adjusting the prefix tokens based on each input image’s content, leading to better alignment between visual and textual representations and more precise detection. This improves the model’s capability to distinguish between triggers and objects, especially when encountering unseen adversarial configurations.
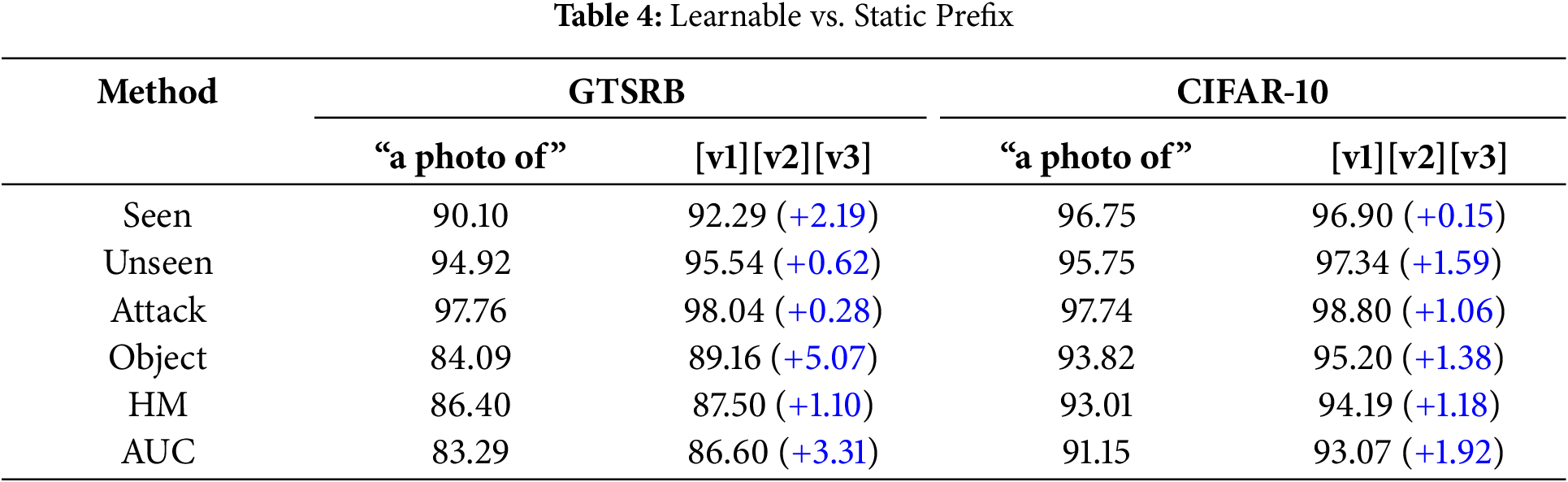
Fig. 4 displays randomly selected images from the test set along with the predicted trigger–object pairs and their ground-truth labels. The examples in the top row highlight successful predictions, illustrating how our framework can handle diverse triggers, object classes, and varying image quality. Even in blurry or distorted cases, such as the “Priority Road” sign, the model still distinguishes both the trigger and the object accurately.
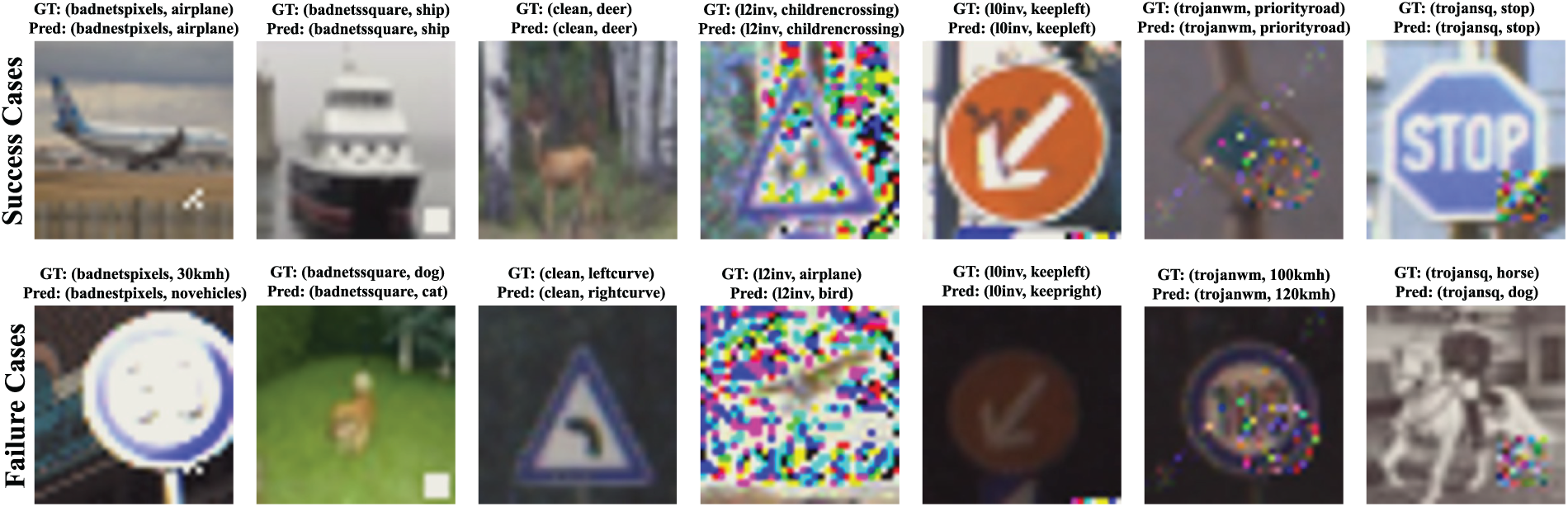
Figure 4: Ground Truth vs. Prediction of DBOM
In contrast, the bottom row depicts failure cases where the predicted objects differ from the ground truth (though the triggers are correctly identified). For instance, in the first error image, “30 km/h” is misclassified as “No Vehicles,” likely due to the heavy blur on the sign. Likewise, in the second example, the model predicts “Dog” instead of “Cat”, a plausible mistake given the animal’s appearance. The fourth image is misjudged as a “Bird” rather than an “Airplane,” suggesting that the system recognized a flying object but failed to capture its specific category. This can be attributed to some key features, such as text or outlines, being nearly imperceptible and making the difference between classes difficult to discern. Overall, despite a few misclassifications caused by blurred or partially obscured features, our model successfully distinguishes a wide range of triggers and objects. This highlights its strong robustness against challenging real-world conditions, even when subtle distortions could easily mislead other systems.
The empirical results demonstrate that DBOM not only achieves SOA performance in detecting both seen and unseen trigger–object pairings, but also maintains high overall accuracy and attack recall even at low poisoning rates. By proactively vetting training data, DBOM prevents backdoor contamination before downstream model training, reducing the need for costly post-training purification and preserving clean samples for model learning.
By separating the backdoor trigger from the underlying object semantics, DBOM not only flags poisoned images, but also recovers the correct object label despite the presence of a backdoor pattern. This has several key benefits. First, it preserves the majority of clean examples so that benign object information is retained rather than discarded, maintaining dataset diversity and reducing the risk of eliminating clean samples. Second, disentanglement yields finer-grained forensic insights into how specific triggers map onto different object categories, revealing systematic attacker strategies and enabling more targeted threat intelligence. Third, the modular nature of trigger and object primitives enables zero-shot detection of trigger-object pairings that were unseen during training, addressing a crucial limitation in conventional trigger-centric defenses. In practice, this means DBOM can adapt to evolving backdoor tactics across multiple object classes, lower false-positive rates by distinguishing benign from malicious features, and streamline training-time vetting helping prevent data contamination at its source rather than reactively purifying a compromised model.
Despite these strengths, it is important to discuss DBOM’s limitations. Our design assumes that the defender maintains a library of T candidate trigger patterns, drawn from previously seen backdoor signatures. In our experiments, T is composed of six well-studied backdoor attacks, but the repository can be extended over time as new threats emerge by disentangling unknown triggers and adding them to the trigger repository. When novel trigger patterns are encountered in new data, we can fine-tune only the visual prompt repository and prefix adapter (rather than retraining the entire VLM backbone) on a small set of those examples, allowing DBOM to rapidly incorporate and detect new triggers with minimal overhead. Although DBOM currently focuses on triggers in T, exploring zero-shot discovery of entirely novel trigger patterns remains an important avenue for future work. Furthermore, the effectiveness of the model depends on the careful tuning of hyperparameters such as
While our experiments so far have focused on a select set of backdoor triggers, we have not yet evaluated DBOM against adversarial perturbations generated by methods like Projected Gradient Descent (PGD) [54] or Fast Gradient Signed Method (FGSM) [55]. Such attacks work by distributing pixel-level noise within a perturbation budget: when the budget is very small, the changes are imperceptible but often yield lower attack success; when it is larger, the attack becomes more effective but also more noticeable to humans. We believe DBOM’s disentangled trigger–object framework could be extended to handle perturbations with higher budgets, where the noise forms a distinct visual signature similar to the currently tested backdoor patterns and thus can cluster effectively in our visual prompt repository. In future work, we plan to explore these alternative attack types to further test DBOM’s resilience. Lastly, evaluating DBOM on larger and more heterogeneous datasets and in real-world data-curation pipelines will further validate its practical utility.
In this paper, we introduced DBOM, a novel disentangled representation learning framework designed to detect both seen and unseen backdoor trigger-object pairings in training datasets. By leveraging a structured factorization of triggers and objects in the embedding space, DBOM enables robust generalization to novel backdoor configurations that evade conventional defenses. Our approach integrates a visual prompt repository and a dynamic prefix adapter to enhance the separation of adversarial triggers from underlying object representations. Experimental results demonstrate that DBOM significantly improves backdoor detection performance, outperforming SOA methods in identifying poisoned samples before they compromise downstream model training. This proactive approach not only enhances the security of DNN training pipelines but also provides deeper insights into backdoor strategies by identifying the objects associated with triggers, offering a novel method for defending against evolving backdoor threats.
Acknowledgement: We would like to acknowledge the UWF Argo Cyber Emerging Scholars (ACES) program funded by the National Science Foundation (NSF) CyberCorps® Scholarship for Service (SFS) for making this research possilble.
Funding Statement: This work is partially supported by the UWF Argo Cyber Emerging Scholars (ACES) program funded by the National Science Foundation (NSF) CyberCorps® Scholarship for Service (SFS) award under grant number 1946442. Any opinions, findings, and conclusions or recommendations expressed in this document are those of the authors and do not necessarily reflect the views of the NSF.
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, Kyle Stein, Andrew A. Mahyari, Guillermo Francia III; Methodology, Kyle Stein, Andrew A. Mahyari, Guillermo Francia III; Software, Kyle Stein; Validation, Kyle Stein; Formal analysis, Kyle Stein, Andrew A. Mahyari, Guillermo Francia III; Writing—original draft preparation, Kyle Stein, Andrew A. Mahyari, Guillermo Francia III; Writing—review and editing, Kyle Stein, Andrew A. Mahyari, Guillermo Francia III, Eman El-Sheikh. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the Corresponding Author, KS, upon reasonable request.
Ethics Approval: Due to the nature of backdoored attacks, all code used to generate them were drawn from methods and datasets already published by the original authors of those backdoor-attack scripts. The backdoored images and their corresponding clean counterparts used in our experiments will be made publicly available after publication to facilitate reproduction of our results. However, we will not redistribute the original attack-generation scripts. Readers may obtain those directly from the authors of the respective prior works cited in this paper.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Devlin J, Chang MW, Lee K, Toutanova K. BERT: pre-training of deep bidirectional transformers for language understanding. In: Proceedings of the North American Chapter of the Association for Computational Linguistics; 2019; Minneapolis, MN, USA. p. 4171–86. [Google Scholar]
2. Chowdhary K, Chowdhary K. Natural language processing. In: Fundamentals of artificial intelligence. New Delhi, India: Springer; 2020. p. 603–49. doi:10.1007/978-81-322-3972-7_19. [Google Scholar] [CrossRef]
3. Galassi A, Lippi M, Torroni P. Attention in natural language processing. IEEE Trans Neural Netw Learn Syst. 2020;32(10):4291–308. doi:10.1109/TNNLS.2020.3019893. [Google Scholar] [CrossRef]
4. Li Y, Wu CY, Fan H, Mangalam K, Xiong B, Malik J, et al. Mvitv2: improved multiscale vision transformers for classification and detection, 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, LA, USA; 2022. p. 4794–804. doi:10.1109/cvpr52688.2022.00476. [Google Scholar] [CrossRef]
5. Gu J, Wang Z, Kuen J, Ma L, Shahroudy A, Shuai B, et al. Recent advances in convolutional neural networks. Pattern Recognit. 2018;77(11):354–77. doi:10.1016/j.patcog.2017.10.013. [Google Scholar] [CrossRef]
6. Snell J, Swersky K, Zemel R. Prototypical networks for few-shot learning. In: Proceeding Advanced Neural Information Process Systems, Curran Associates Inc. Red Hook, NY, USA; 2017. p. 4080–90. [Google Scholar]
7. Akhtar N, Mian A. Threat of adversarial attacks on deep learning in computer vision: a survey. IEEE Access. 2018;6:14410–30. doi:10.1109/access.2018.2807385. [Google Scholar] [CrossRef]
8. Schwinn L, Dobre D, Günnemann S, Gidel G. Adversarial attacks and defenses in large language models: old and new threats. In: Proceedings on “I Can't Believe It's Not Better: Failure Modes in the Age of Foundation Models” at NeurIPS 2023 Workshops; Cambridge, MA: PMLR; 2023. p. 103–17. [cited 2025 Jun 21]. Available from: https://proceedings.mlr.press/v239/schwinn23a.html. [Google Scholar]
9. Radford A, Kim JW, Hallacy C, Ramesh A, Goh G, Agarwal S, et al. Learning transferable visual models from natural language supervision. In: International Conference on Machine Learning. Cambridge, MA: PMLR; 2021. p. 5028748–63. [Google Scholar]
10. Goodfellow I, Pouget-Abadie J, Mirza M, Xu B, Warde-Farley D, Ozair S, et al. Generative adversarial networks. Commun ACM. 2020;63(11):139–44. doi:10.1145/3422622. [Google Scholar] [CrossRef]
11. Rombach R, Blattmann A, Lorenz D, Esser P, Ommer B. High-resolution image synthesis with latent diffusion models. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2022; New Orleans,LA, USA. p. 10684–95. doi:10.1109/cvpr52688.2022.01042. [Google Scholar] [CrossRef]
12. Gu T, Liu K, Dolan-Gavitt B, Garg S. BadNets: evaluating backdooring attacks on deep neural networks. IEEE Access. 2019;7:47230–44. doi:10.1109/access.2019.2909068. [Google Scholar] [CrossRef]
13. Liu Y, Ma S, Aafer Y, Lee WC, Zhai J, Wang W, et al. Trojaning attack on neural networks. In: 25th Annual Network And Distributed System Security Symposium (NDSS 2018). San Diego, CA, USA. Reston, VA: Internet Soc; 2018. doi:10.14722/ndss.2018.23291. [Google Scholar] [CrossRef]
14. Li YL, Xu Y, Mao X, Lu C. Symmetry and group in attribute-object compositions. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2020 Jun 13–19; Seattle, WA, USA. p. 11316–25. doi:10.1109/cvpr42600.2020.01133. [Google Scholar] [CrossRef]
15. Nguyen A, Tran A. Wanet–imperceptible warping-based backdoor attack. arXiv:2102.10369. 2021. [Google Scholar]
16. Niu Y, He S, Wei Q, Wu Z, Liu F, Feng L. Bdetclip: multimodal prompting contrastive test-time backdoor detection. arXiv:2405.15269. 2024. [Google Scholar]
17. Guo M, Yang Y, Xu R, Liu Z, Lin D. When nas meets robustness: in search of robust architectures against adversarial attacks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2020; Seattle, WA, USA. p. 631–40. doi:10.1109/cvpr42600.2020.00071. [Google Scholar] [CrossRef]
18. Yue Z, Lin B, Zhang Y, Liang C. Effective, efficient and robust neural architecture search. In: 2022 International Joint Conference on Neural Networks (IJCNN). Padua, Italy: IEEE; 2022. p. 1–8. [Google Scholar]
19. Zhu M, Wei S, Shen L, Fan Y, Wu B. Enhancing fine-tuning based backdoor defense with sharpness-aware minimization. In: Proceedings of the IEEE/CVF International Conference on Computer Vision; 2023; Paris, France. p. 4466–77. doi:10.1109/iccv51070.2023.00412. [Google Scholar] [CrossRef]
20. Peri N, Gupta N, Huang WR, Fowl L, Zhu C, Feizi S, et al. Deep k-nn defense against clean-label data poisoning attacks. In: Computer Vision–ECCV 2020 Workshops; 2020 Aug 23–28; Glasgow, UK: Springer; 2020. p. 55–70. doi:10.1007/978-3-030-66415-2_4. [Google Scholar] [CrossRef]
21. Kantaros Y, Carpenter T, Sridhar K, Yang Y, Lee I, Weimer J. Real-time detectors for digital and physical adversarial inputs to perception systems. In: Proceedings of the ACM/IEEE 12th International Conference on Cyber-Physical Systems. Nashville, TN, USA; 2021. p. 67–76. doi:10.1145/3450267.3450535. [Google Scholar] [CrossRef]
22. Wen J. HOLMES: to detect adversarial examples with multiple detectors. arXiv:2405.19956. 2024. [Google Scholar]
23. Stein K, Mahyari AA, Francia G, El-Sheikh E. Proactive adversarial defense: harnessing prompt tuning in vision-language models to detect unseen backdoored images. arXiv:2412.08755. 2024. [Google Scholar]
24. Karim N, Arafat AA, Khalid U, Guo Z, Rahnavard N. Augmented neural fine-tuning for efficient backdoor purification. In: European Conference on Computer Vision. Cham, Switzerland: Springer Nature Switzerland; 2024. p. 401–18. doi:10.1007/978-3-031-72989-8_23. [Google Scholar] [CrossRef]
25. Xu Y, Gu Y, Sakurai K. PAD-FT: a lightweight defense for backdoor attacks via data purification and fine-tuning. arXiv:2409.12072. 2024. [Google Scholar]
26. Chen B, Carvalho W, Baracaldo N, Ludwig H, Edwards B, Lee T, et al. Detecting backdoor attacks on deep neural networks by activation clustering. arXiv:1811.03728. 2018. [Google Scholar]
27. Tran B, Li J, Madry A. Spectral signatures in backdoor attacks. Adv Neural Inf Process Syst. 2018;31. doi:10.48550/arXiv.1811.00636. [Google Scholar] [CrossRef]
28. Hayase J, Kong W, Somani R, Oh S. SPECTRE: defending against backdoor attacks using robust statistics. In: Proceedings of the 38th International Conference on Machine Learning. Cambridge, MA: Proceedings of Machine Learning Research (PMLR); 2021. p. 4129–39. [cited 2025 Jun 21]. Available from: https://proceedings.mlr.press/v139/hayase21a.html. [Google Scholar]
29. Tang D, Wang X, Tang H, Zhang K. Demon in the variant: statistical analysis of DNNs for robust backdoor contamination detection. In: 30th USENIX Security Symposium (USENIX Security 21). Berkeley, CA: USENIX Association; 2021. p. 1541–58. [cited 2025 Jun 21]. Available from: https://www.usenix.org/conference/usenixsecurity21/presentation/tang-di. [Google Scholar]
30. Ma W, Wang D, Sun R, Xue M, Wen S, Xiang Y. The “Beatrix” resurrections: robust backdoor detection via gram matrices. arXiv:2209.11715. 2022. [Google Scholar]
31. Li Y, He J, Huang H, Sun J, Ma X. Shortcuts everywhere and nowhere: exploring multi-trigger backdoor attacks. arXiv:2401.15295. 2024. [Google Scholar]
32. Lake BM. Towards more human-like concept learning in machines: compositionality, causality, and learning-to-learn. massachusetts institute of technology; 2014. [cited 2025 Jul 10]. Available from: http://hdl.handle.net/1721.1/95856. [Google Scholar]
33. Tong B, Wang C, Klinkigt M, Kobayashi Y, Nonaka Y. Hierarchical disentanglement of discriminative latent features for zero-shot learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, CA, USA; 2019. p. 11467–76. [Google Scholar]
34. Chen Z, Luo Y, Qiu R, Wang S, Huang Z, Li J, et al. Semantics disentangling for generalized zero-shot learning. In: Proceedings of the IEEE/CVF International Conference on Computer Vision; 2021; Montreal, QC, Canada. p. 8712–20. doi:10.1109/iccv48922.2021.00859. [Google Scholar] [CrossRef]
35. Li X, Xu Z, Wei K, Deng C. Generalized zero-shot learning via disentangled representation. Proc AAAI Conf Artif Intell. 2021;35(3):1966–74. doi:10.1609/aaai.v35i3.16292. [Google Scholar] [CrossRef]
36. Hao S, Han K, Wong KYK. Learning attention as disentangler for compositional zero-shot learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2023 Jun 18–24; Vancouver, BC, Canada. p. 15315–24. doi:10.1109/cvpr52729.2023.01470. [Google Scholar] [CrossRef]
37. Stein K, Mahyari A, Francia G, El-Sheikh E. Visual adaptive prompting for compositional zero-shot learning. arXiv:2502.20292. 2025. [Google Scholar]
38. Li X, Yang X, Wei K, Deng C, Yang M. Siamese contrastive embedding network for compositional zero-shot learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2022; Orleans, LA, USA. p. 9326–35. doi:10.1109/cvpr52688.2022.00911. [Google Scholar] [CrossRef]
39. Jing C, Li Y, Chen H, Shen C. Retrieval-augmented primitive representations for compositional zero-shot learning. Proc AAAI Conf Artif Intell. 2024;38(3):2652–60. doi:10.1609/aaai.v38i3.28043. [Google Scholar] [CrossRef]
40. Nayak NV, Yu P, Bach SH. Learning to compose soft prompts for compositional zero-shot learning. arXiv:2204.03574. 2022. [Google Scholar]
41. Xu G, Chai J, Kordjamshidi P. GIPCOL: graph-injected soft prompting for compositional zero-shot learning. In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision; 2024; Waikoloa, HI, USA. p. 5774–83. doi:10.1109/wacv57701.2024.00567. [Google Scholar] [CrossRef]
42. Lu X, Guo S, Liu Z, Guo J. Decomposed soft prompt guided fusion enhancing for compositional zero-shot learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2023; Vancouver, BC, Canada. p. 23560–9. doi:10.1109/cvpr52729.2023.02256. [Google Scholar] [CrossRef]
43. Li S, Xue M, Zhao BZH, Zhu H, Zhang X. Invisible backdoor attacks on deep neural networks via steganography and regularization. IEEE Trans Dependable Secure Comput. 2020;18(5):2088–105. doi:10.1109/tdsc.2020.3021407. [Google Scholar] [CrossRef]
44. Wu B, Wei S, Zhu M, Zheng M, Zhu Z, Zhang M, et al. Defenses in adversarial machine learning: a survey. arXiv:2312.08890. 2023. [Google Scholar]
45. Avd O, Li Y, Vinyals O. Representation learning with contrastive predictive coding. arXiv:1807.03748. 2018. [Google Scholar]
46. Zhou K, Yang J, Loy CC, Liu Z. Conditional prompt learning for vision-language models. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2022 Jun 17–24; New Orleans, LA, USA. p. 16816–25. doi:10.1109/cvpr52688.2022.01631. [Google Scholar] [CrossRef]
47. Zhou K, Yang J, Loy CC, Liu Z. Learning to prompt for vision-language models. Int J Comput Vis. 2022;130(9):2337–48. doi:10.1007/s11263-022-01653-1. [Google Scholar] [CrossRef]
48. Khattak MU, Rasheed H, Maaz M, Khan S, Khan FS. Maple: multi-modal prompt learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2023 Jun 17–24; Vancouver, BC, Canada. p. 19113–22. doi:10.1109/cvpr52729.2023.01832. [Google Scholar] [CrossRef]
49. Krizhevsky A, Hinton G. Learning multiple layers of features from tiny images. 2009. [cited 2025 Jul 10]. Available from: https://www.cs.utoronto.ca/. [Google Scholar]
50. Stallkamp J, Schlipsing M, Salmen J, Igel C. Man vs. computer: benchmarking machine learning algorithms for traffic sign recognition. Neural Netw. 2012;32(1):323–32. doi:10.1016/j.neunet.2012.02.016. [Google Scholar] [CrossRef]
51. Yao Y, Li H, Zheng H, Zhao BY. Latent backdoor attacks on deep neural networks. In: Proceedings of the 2019 ACM SIGSAC Conference on Computer and Communications Security; 2019 Nov 06; London, UK. p. 2041–55. [Google Scholar]
52. Paszke A, Gross S, Massa F, Lerer A, Bradbury J, Chanan G, et al. Pytorch: an imperative style, high-performance deep learning library. Adv Neural Inf Process Syst. 2019;32. doi:10.5555/3454287.3455008. [Google Scholar] [CrossRef]
53. Kingma DP. Adam: a method for stochastic optimization. arXiv:1412.6980. 2014. [Google Scholar]
54. Madry A, Makelov A, Schmidt L, Tsipras D, Vladu A. Towards deep learning models resistant to adversarial attacks. In: 6th International Conference on Learning Representations, ICLR 2018; 2018 Apr 30–May 3; Vancouver,BC, Canada. [Google Scholar]
55. Goodfellow IJ, Shlens J, Szegedy C. Explaining and harnessing adversarial examples. In: Bengio Y, LeCun, J, editors. In: 3rd International Conference on Learning Representations, ICLR 2015; 2015 May 7–9; San Diego, CA, USA. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools