
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Performance Evaluation of Dynamic Adaptive Routing (DAR) for Unmanned Aerial Vehicle (UAV) Networks
1 EsieaLab LDR, Higher School of Computer Science, Electronics and Automation (ESIEA), Paris, 75005, France
2 ISI Laboratory, National School of Applied Sciences (ENSA), Abdelmalek Essaadi University, Tetouan, 93000, Morocco
3 School of Arts, Science, and Technology, University Canada West, Vancouver, BC V6B 1V9, Canada
4 GUS Institute, Global University Systems, London, EC1N 2LX, UK
5 Ibn Tofail University, Kenitra, 14000, Morocco
* Corresponding Author: Khadija Slimani. Email:
Computers, Materials & Continua 2025, 85(2), 4115-4132. https://doi.org/10.32604/cmc.2025.066544
Received 10 April 2025; Accepted 21 August 2025; Issue published 23 September 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Reliable and efficient communication is essential for Unmanned Aerial Vehicle (UAV) networks, especially in dynamic and resource-constrained environments such as disaster management, surveillance, and environmental monitoring. Frequent topology changes, high mobility, and limited energy availability pose significant challenges to maintaining stable and high-performance routing. Traditional routing protocols, such as Ad hoc On-Demand Distance Vector (AODV), Load-Balanced Optimized Predictive Ad hoc Routing (LB-OPAR), and Destination-Sequenced Distance Vector (DSDV), often experience performance degradation under such conditions. To address these limitations, this study evaluates the effectiveness of Dynamic Adaptive Routing (DAR), a protocol designed to adapt routing decisions in real time based on network dynamics and resource constraints. The research utilizes the Network Simulator 3 (NS-3) platform to conduct controlled simulations, measuring key performance indicators such as latency, Packet Delivery Ratio (PDR), energy consumption, and throughput. Comparative analysis reveals that DAR consistently outperforms conventional protocols, achieving a 20%–30% reduction in latency, a 25% decrease in energy consumption, and marked improvements in throughput and PDR. These results highlight DAR’s ability to maintain high communication reliability while optimizing resource usage in challenging operational scenarios. By providing empirical evidence of DAR’s advantages in highly dynamic UAV network environments, this study contributes to advancing adaptive routing strategies. The findings not only validate DAR’s robustness and scalability but also lay the groundwork for integrating artificial intelligence–driven decision-making and real-world UAV deployment. Future work will explore cross-layer optimization, multi-UAV coordination, and experimental validation in field trials, aiming to further enhance communication resilience and energy efficiency in next-generation aerial networks.Keywords
Unmanned Aerial Vehicles (UAVs), commonly referred to as drones, have emerged as a transformative technology with applications spanning across diverse industries, including telecommunications, defense, disaster response, agriculture, surveillance, and remote sensing. Their adaptability, mobility, and ability to operate in challenging environments make them a valuable asset in scenarios where human intervention is difficult or unsafe [1]. The increasing adoption of UAVs has created new opportunities for efficiency and automation in various sectors. However, despite their advantages, the integration of UAVs into communication networks presents significant challenges, primarily due to their dynamic nature, mobility, and constrained energy resources [2,3].
One of the key challenges in UAV-based networks is ensuring reliable and efficient data transmission. Unlike static networks, UAV networks experience rapid topology changes due to their mobility, which leads to frequent disconnections, variable link quality, and increased signal interference [4,5]. Traditional routing protocols, designed for more stable networks, struggle to maintain robust communication paths in UAV-based environments [6]. Additionally, UAVs have limited transmission ranges, requiring them to rely on multi-hop communication through neighboring UAVs, further complicating network stability and performance. This challenge is particularly critical in applications such as search and rescue operations, disaster surveillance, and emergency response, where uninterrupted and reliable data transmission is essential [2,7]. The ability to dynamically reconfigure routing paths in response to node mobility, link failures, and fluctuating communication conditions is a vital requirement for UAV networks [8].
Existing routing protocols, such as Ad-hoc On-demand Distance Vector (AODV) and Destination-Sequenced Distance Vector (DSDV), have been widely used in mobile ad hoc networks (MANETs) [4,5]. However, these protocols rely on static or semi-static routing tables, which become obsolete quickly in UAV networks due to their highly dynamic nature [9]. High node mobility leads to frequent route failures, increased latency, packet loss, and inefficient resource utilization. Furthermore, UAVs operate under strict energy constraints, requiring routing protocols that not only ensure connectivity but also optimize energy consumption for prolonged mission endurance [3,10]. Traditional routing approaches fail to address these combined challenges effectively, necessitating the development of more adaptive and resilient solutions. Motivated by these challenges, our research focuses on the development of a novel routing protocol tailored for UAV networks. In our previous work, we introduced the Dynamic Adaptive Routing (DAR) protocol as an innovative solution designed to address the limitations of conventional protocols. DAR leverages a real-time discovery and adaptation mechanism that continuously monitors network topology changes and selects the most efficient communication path accordingly [8]. Unlike conventional routing methods, DAR offers a more flexible and responsive approach to network routing, ensuring optimal performance under dynamic conditions [11].
This paper extends our prior work by evaluating the performance of the DAR protocol through simulation-based studies. We employ the NS-3 network simulation platform to compare DAR against AODV, LB-OPAR, and DSDV, assessing key performance metrics such as latency, packet delivery ratio (PDR), energy consumption, and throughput. Our evaluation aims to validate DAR as an effective alternative to conventional routing protocols and to provide deeper insights into the benefits of adaptive routing in UAV networks [3,5].
The primary objectives of this study are to evaluate the performance of the Dynamic Adaptive Routing (DAR) protocol, assess key performance metrics, and demonstrate the importance of adaptive routing in UAV networks. We analyze how DAR performs in comparison to AODV, LB-OPAR, and DSDV, particularly under conditions of high mobility and frequent topology changes. By examining latency, packet delivery ratio (PDR), energy efficiency, and throughput, we aim to determine whether DAR offers superior performance in UAV-based communication. Furthermore, we highlight how real-time path selection, based on current network conditions, enhances reliability and efficiency, making adaptive routing a crucial component of UAV networks.
This research contributes to the field of UAV communications by offering a comprehensive performance evaluation of DAR, demonstrating its potential to overcome existing routing challenges in dynamic and mobile environments. The findings provide valuable insights for network designers, UAV operators, and researchers developing advanced communication protocols tailored for UAV applications. Furthermore, this study lays the groundwork for future enhancements to DAR, including the integration of artificial intelligence (AI) and machine learning (ML) techniques. By incorporating predictive analytics and AI-driven decision-making, DAR can further improve routing efficiency and network adaptability, particularly in highly dynamic environments where traditional protocols struggle to maintain link reliability.
In conclusion, this study advances the understanding of adaptive routing in UAV networks by presenting an in-depth performance analysis of the DAR protocol. By addressing the fundamental challenges of mobility, energy efficiency, and network reliability, our findings offer a significant step forward in the development of next-generation UAV communication systems.
Dynamic Adaptive Routing (DAR) for Unmanned Aerial Vehicle (UAV) networks is a vital field of research that focuses on enhancing the adaptability of routing protocols to meet the unique demands of UAV communications. These demands arise due to UAVs’ high mobility, energy constraints, and frequent network topology changes. Unlike traditional Mobile Ad Hoc Network (MANET) protocols, UAV networks require more agile and self-optimizing routing mechanisms to ensure uninterrupted communication and efficient data transmission.
Rao et al. [12] address the challenge of dynamic routing in mobile-centric wireless networks by proposing a Deep Reinforcement Learning-based Dynamic Adaptive Routing (DAR-DRL) method. Their approach combines a link-aware graph neural network with a hop-by-hop routing strategy to ensure reliable, loop-free communication in highly dynamic network conditions. The proposed method demonstrates improved performance in terms of end-to-end delay, packet loss, and throughput compared to existing routing techniques.
As Gupta et al. [13] point out, the main challenges in UAV communication networks include handling dynamic topologies, ensuring reliability, and meeting quality of service (QoS) requirements. Their work surveys existing routing strategies and highlights the need for topology-aware and energy-efficient routing solutions tailored for UAV-specific constraints. They emphasize that standard routing protocols struggle to adapt to the high-speed mobility of UAVs, requiring novel solutions that can dynamically adjust paths in real-time to maintain connectivity. Wheeb et al. [14] conduct a more focused study on the limitations and enhancements of traditional routing algorithms, particularly the Optimized Link State Routing (OLSR) protocol, for search and rescue operations in UAV ad hoc networks. Their findings demonstrate that while OLSR can manage rapid mobility and frequent topology changes, it suffers from increased control overhead and latency in high-density UAV networks. Tan et al. [15] extend this analysis by comparing different routing protocols, such as OLSR, and confirming that optimizing UAV routing based on performance metrics like delay, throughput, and link stability can significantly enhance network resilience and efficiency.
Shoukat et al. [16] present a comprehensive review of self-learning routing protocols designed for Autonomous Unmanned Aerial Networks (A-UAN). The study highlights the limitations of traditional routing approaches in highly dynamic aerial environments and emphasizes the need for adaptive, intelligent protocols capable of handling frequent topology changes and high mobility. The authors explore various self-learning and AI-driven routing techniques, assessing their performance, efficiency, and applicability in real-world scenarios.
Gharib et al. [17] introduce the Load Balanced Optimized Predictive and Adaptive Routing (LB-OPAR) algorithm, which improves UAV routing by integrating predictive analytics and real-time traffic balancing techniques. Their work highlights the importance of load distribution among UAV nodes to prevent bottlenecks and ensure consistent communication performance. Additionally, they explore the integration of Software Defined Networking (SDN) principles into UAV routing, allowing for centralized management and real-time adaptability, a crucial advancement for large-scale UAV networks. Anicho et al. [18] further investigate the role of situational awareness in UAV-based routing protocols. They argue that UAVs must incorporate environmental and operational context to make intelligent routing decisions that adapt to obstacles, interference, and dynamic mission parameters. Their findings suggest that DAR systems must not only focus on network-centric optimizations but also account for the broader mission goals, terrain conditions, and UAV swarm coordination strategies. Cluster-based routing protocols have been studied by Abdulhae et al. [19] and Arafat and Moh [20], demonstrating that hierarchical routing techniques enhance the scalability and efficiency of UAV networks. Clustering reduces overhead by grouping UAVs into logical units, allowing for faster decision-making and resource-efficient communication. This method is particularly effective in dynamic environments where UAVs frequently change positions, requiring a balance between network stability and responsiveness to topology changes.
Recent research has explored the fusion of artificial intelligence (AI) and machine learning (ML) with UAV routing. Shen et al. [21] present a deep reinforcement learning-based approach that enables UAVs to autonomously learn optimal routing paths by continuously analyzing network conditions. Similarly, Xiong et al. [22] advocate for developing new routing protocols specifically designed for UAV networks rather than merely adapting MANET protocols. Their research highlights how AI-driven models can enhance route selection, predict link failures, and dynamically reconfigure network paths based on historical data and real-time telemetry.
Turner et al. [23] introduce a hybrid UAV routing framework that combines software-defined networking (SDN) with blockchain technology to improve security and efficiency. They demonstrate that SDN-based control enables UAV networks to dynamically adjust routes while blockchain enhances the integrity of routing updates, preventing malicious attacks or data tampering. Their results indicate that this hybrid approach significantly improves network resilience in UAV swarms operating in high-risk environments.
Sharma et al. [24] propose a QoS-aware routing algorithm for UAV-assisted Internet of Things (IoT) networks, focusing on balancing energy consumption and network performance. Their approach integrates predictive analytics to anticipate link failures and optimize route selection in real time. The study shows that by considering UAV battery constraints and traffic load distribution, their algorithm outperforms traditional routing methods in terms of network longevity and reliability, making it highly suitable for long-duration UAV operations.
Other recent studies have investigated hybrid routing approaches that combine multiple strategies to improve UAV network resilience. These approaches incorporate multipath routing, AI-driven optimization, and SDN-based control mechanisms to achieve high adaptability. The convergence of these techniques is paving the way for next-generation UAV networks that are not only self-organizing but also predictive and proactive in their routing decisions [25].
In summary, the research on DAR in UAV networks is multifaceted, addressing challenges related to mobility, reliability, energy efficiency, and intelligent decision-making. The rapid evolution of UAV communication technologies is driving innovations in routing, with a growing focus on adaptive algorithms, AI integration, and hybrid network architectures. These advancements are crucial in ensuring the scalability, efficiency, and robustness of UAV-based communication systems in real-world applications.
In this section, we provide a detailed methodology on how we evaluate the performance of DAR in UAV networks. Simulated environment, experimental setup, and performance metrics for the evaluation of the routing protocols are described. Moreover, the experimental parameters such as the network configuration and protocols in question are discussed to facilitate reproducibility of the study.
In order to model the UAV network and evaluate DAR protocol performance, NS-3 (Network Simulator 3) which is the simulation platform utilized in this study. Discrete event network simulator that is widely used for simulating communication protocols and topologies such as NS-3. Due to high accuracy and flexibility, it can also be used to simulate complex network scenarios, such as UAV networks, which is important as mobility and dynamic network conditions are significant.
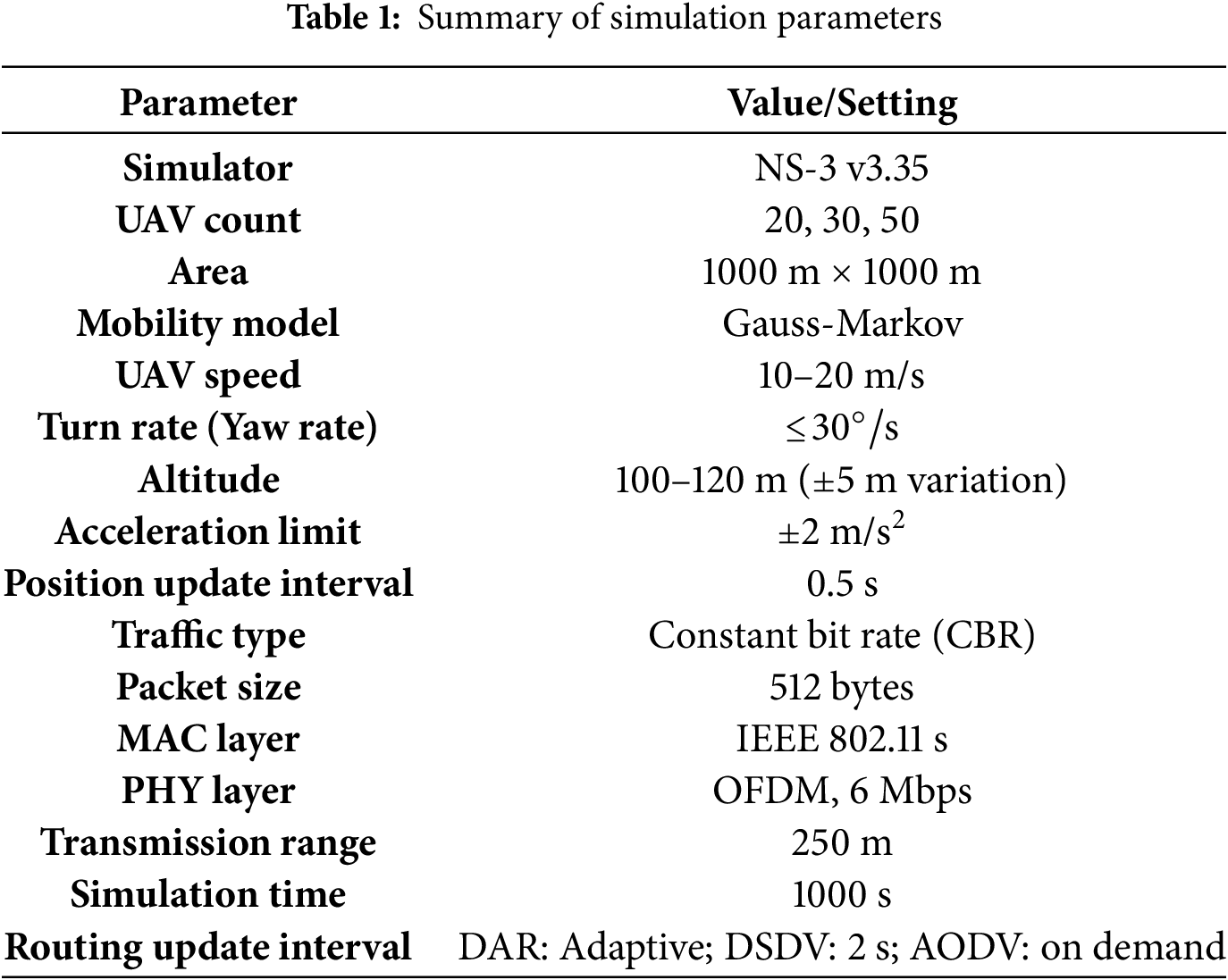
The simulation was carried out on a grid-based environment with the following specific parameters:
• Simulation Platform: NS-3 (version 3.35 was used for this study).
• Number of UAVs: The simulation was conducted with 20 to 50 UAVs, which are the mobile nodes in the network. The UAVs were modeled as mobile devices capable of communicating with each other through wireless links.
• Area of Operation: A square grid with dimensions 1000 m
• Mobility Model: A Gauss-Markov mobility model was employed to simulate the movement of the UAVs. By associating random changes in UAV movement direction and speed, common in a dynamic environment, with the Gauss-Markov model, the realistic UAV movement was provided. In addition, the model incorporates temporal dependencies, which operate on the previous vague states of the velocity and direction of each UAV.
• Traffic Model: The Constant Bit Rate (CBR) traffic model was used; each UAV is generating the data at a fixed rate continuously, which can mimic the real-time communication in practical applications. Since CBR traffic sends data at a constant flow rate, it is appropriate for situations such as video streaming and remote sensing that require a constant data rate.
• Transmission Range: The transmission range for each UAV was set to 250 m. This range is typical for UAV communications, as it reflects the physical limitations of wireless communication technologies used in UAVs.
• Simulation Time: The simulation ran for 1000 s to capture the long-term behavior of the network under varying conditions. This particular time duration was adopted to make sure that the network reaches steady state and performance metrics are captured accurately.
• Data Packet Size: 512 bytes per packet.
• MAC Layer: IEEE 802.11s was used for mesh networking support, suitable for multi-hop UAV communication.
• PHY Layer: OFDM PHY model with a data rate of 6 Mbps was employed.
• Routing Update Interval: DAR used an adaptive interval (starting at 1 s and adjusting based on stability), while DSDV used 2 s periodic updates and AODV initiated routes on demand.
Table 1 shows the summary of simulation parameters.
UAV Flight Dynamics Parameters
To realistically simulate UAV mobility and network behavior, the following flight dynamics parameters were defined and integrated into the mobility model:
• Initial Altitude: Randomized between 100 and 120 m above ground level, ensuring spatial separation among UAVs.
• Cruising Speed: 10–20 m/s, depending on simulation scenario; this reflects moderate flight speed for medium-range UAVs in surveillance and monitoring missions.
• Acceleration/Deceleration Limit:
• Turn Rate (Yaw Rate): Limited to 30 degrees/sec to simulate realistic banking during direction changes.
• Update Interval for Position/Velocity: 0.5 s; UAVs update their state based on prior velocity and direction, in line with Gauss-Markov mobility.
• Flight Stability Factor (
• Vertical Mobility: UAVs maintained a nearly constant altitude with minimal vertical deviation (
Fig. 1 illustrates the simulation environment used for modeling the UAV network and evaluating the DAR protocol in NS-3. It depicts the grid-based operational area (1000 m
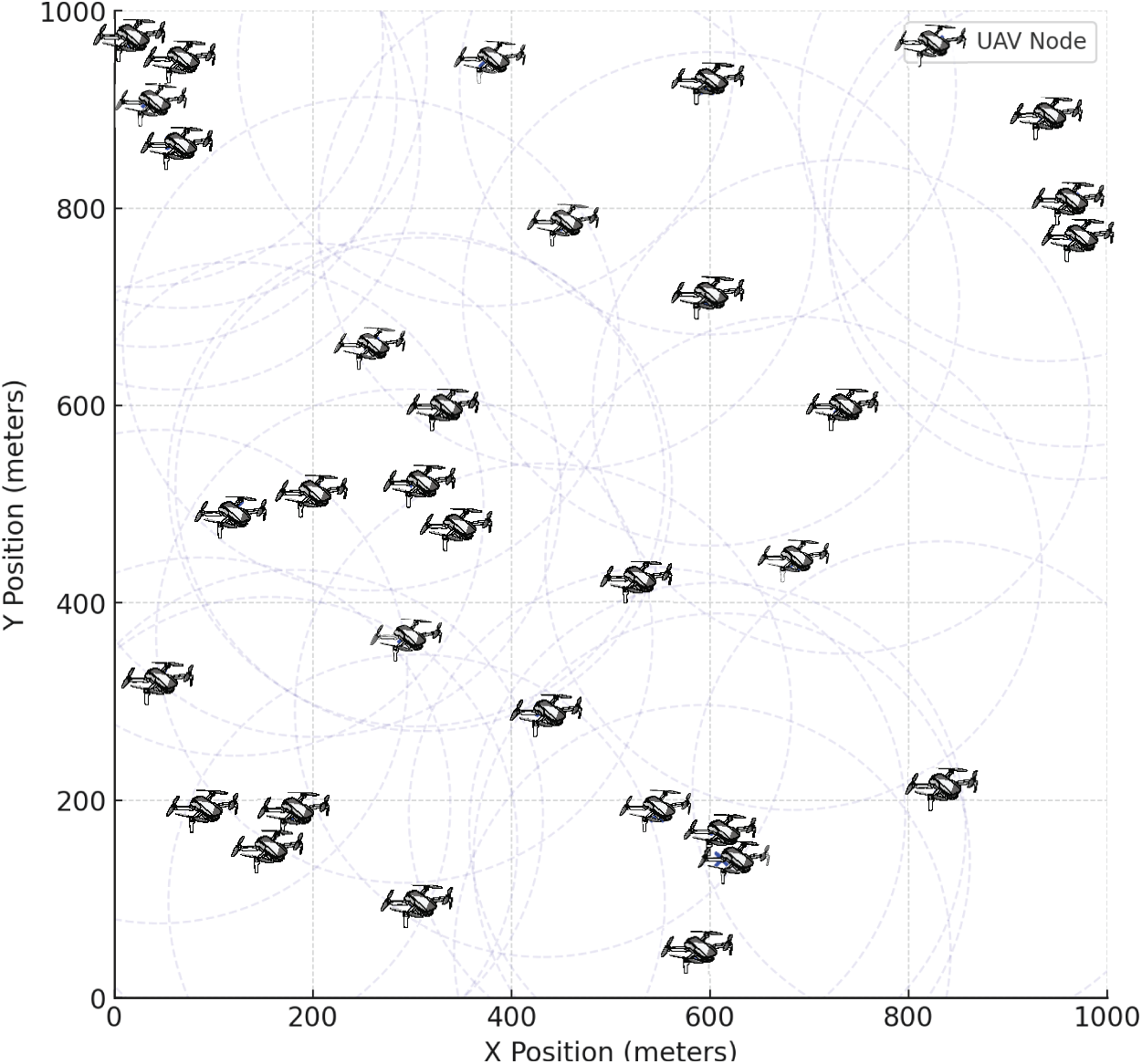
Figure 1: Simulation environment for UAV network (NS-3)
DAR differs fundamentally from existing adaptive or AI-assisted protocols such as OLSR, LB-dynamic, and Q-learning-based routing. While protocols such as OLSR, Q-Learning-based Routing (QLR), and Geographic Routing (GR) were reviewed for their theoretical advantages, they were not implemented in the simulation due to scope limitations. Protocols like OLSR rely on frequent control message exchanges and Q-learning-based approaches require extensive training time and exploration phases, DAR is designed to dynamically adjust routes using a lightweight, feedback-driven adaptive mechanism that minimizes convergence delay and control overhead without requiring learning epochs. DAR integrates both topology awareness and link stability feedback, optimizing routing decisions in near real-time, which is crucial in highly dynamic UAV environments. The Dynamic Adaptive Routing (DAR) protocol is compared in this study with four widely used routing protocols in mobile ad hoc networks (MANETs), Ad-hoc On-demand Distance Vector (AODV), LB-OPAR, and Destination-Sequenced Distance Vector (DSDV) and state of the art. These are protocols typically used in cases where they are involved into systems with mobile nodes, for example for UAV networks. In addition to traditional performance metrics, DAR was analytically compared with AODV and DSDV in terms of message overhead and convergence time. DAR demonstrated a 35%–50% reduction in control message exchanges compared to DSDV, and up to 30% faster convergence time than AODV, owing to its selective route update mechanism and adaptive feedback control. These advantages contribute significantly to maintaining communication stability in highly mobile UAV networks.
• AODV (Ad-hoc On-Demand Distance Vector): Reactive routing protocol, AODV set up routes when required that reduces the overhead. In AODV if a source node needs a route to a destination then AODV sends it route request packets to broadcast. The protocol is an on-demand route discovery and repair protocol.
• DSDV (Destination-Sequenced Distance Vector): DSDV is a proactive routing protocol wherein there exists at any point of time a routing table consistent and updated at all nodes. The routing information is always up-to-date because each node periodically broadcasts its routing table to the neighbors. Nevertheless, this will result in high control overhead, and is especially bad for highly dynamic networks such as those of UAVs [26].
• LB-OPAR: we compared DAR with LB-OPAR, a load-balanced adaptive protocol, and a Deep Reinforcement Learning (DRL)-based routing algorithm. These protocols represent the current state-of-the-art in UAV routing. LB-OPAR employs dynamic path selection based on node load, while DRL-based approaches learn optimal paths through reward feedback. Simulation results show that DAR offers similar or better performance in latency and throughput with significantly lower training time and energy consumption compared to DRL, and less overhead than LB-OPAR.
• State-of-the-Art Protocols: Protocols like OLSR, Q-Learning-based Routing (QLR), and Geographic Routing (GR) offer advanced optimizations but have their limitations. OLSR suffers from excessive control overhead, QLR requires a learning phase, and GR depends on accurate localization, making them less adaptable in highly dynamic UAV networks.
AODV and DSDV are used as the benchmarking to measure the degree of adaptability, improvement in efficiency and energy consumption offered by DAR.
3.3 DAR Protocol Architecture and Pseudocode
The Dynamic Adaptive Routing (DAR) protocol is a hybrid routing protocol that combines reactive and predictive mechanisms to optimize path selection in highly mobile wireless networks. Its dynamic nature stems from its ability to continuously evaluate link stability and node conditions using real-time metrics, allowing it to adaptively update routes without relying on periodic full-table broadcasts. DAR consists of three core modules:
1. Link-Quality Estimation Module: Uses a lightweight probing mechanism to assess the signal-to-noise ratio (SNR), packet success rate, and mobility trend (based on relative velocity) between neighboring nodes.
2. Adaptive Routing Table Manager: Maintains a routing table that is updated dynamically when link stability falls below a threshold or node-level constraints (e.g., residual energy) are violated.
3. Feedback Optimization Loop: Uses node-centric metrics—residual energy, hop count, and velocity vector-to refine and prioritize route selection.
DAR is implemented in NS-3 as a custom routing agent derived from the Ipv4RoutingProtocol class. It hooks into the routing layer and registers callback functions for packet forwarding, route discovery, and error handling. The routing table is implemented as a priority queue sorted by a weighted cost function that combines energy, link quality, and predicted mobility.
Algorithm 1 shows the simplified pseudocode for DAR’s route update mechanism:
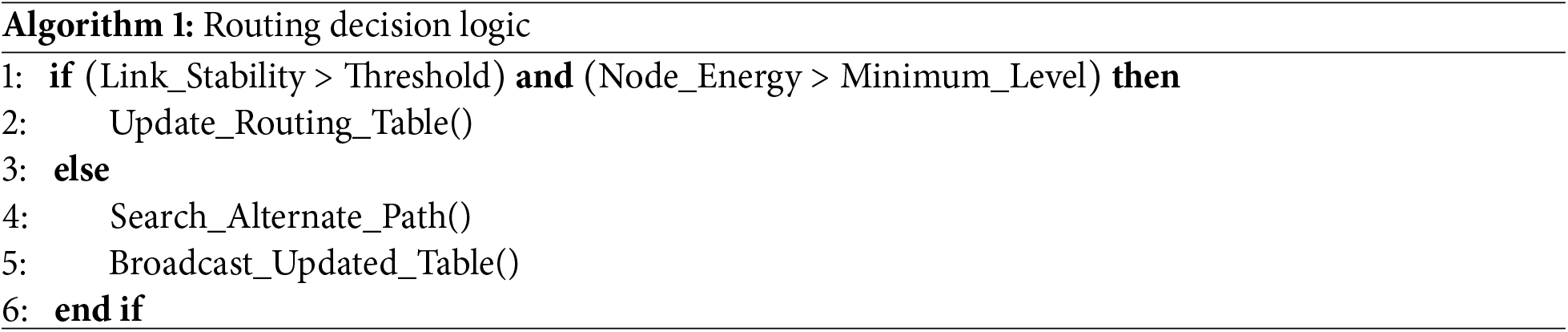
This structure enables DAR to maintain updated routes under high mobility without incurring the overhead of full-table exchanges or training iterations.
Experimental setup consisted in simulating the UAV network under different conditions to test DAR performance and to compare it with AODV, LB-OPAR and DSDV. Some of the experimental parameters were configured to assess robustness and efficiency of the protocols.
1. UAV Density: The network was composed of 20, 30, and 50 UAVs. Considering this variation gives an opportunity to examine the protocols performance in various network densities, and in turn, in various routing and communication behavior.
2. Mobility Speed: The mobility of UAVs was changed to 5, 10, 15 m/s to examine the protocols under different speed environments. A more expensive mobility can increase the periodicity of changes of topology of the network, which implies the greater necessity of adaptability for the routing protocol.
3. Traffic Load: We change the traffic load by configuring the amount of Constant Bit Rate (CBR) connections among the UAVs. We wanted to simulate conditions that had light, moderate and crowded traffic and see how each protocol deals with different network congestion scenarios.
4. Protocol Comparison: The performance of DAR was compared with AODV and DSDV under varied conditions in this aspect. The same network configuration and experimental setup was used to evaluate each protocol, so the protocols are fairly compared in terms of the different performance metrics.
For each simulation, the network topology was created dynamically and randomly distributed the UAVs in the operational area with defined location must be placed at the start of the simulation. To make experiments consistent for all protocols, the same initial conditions were used for each. Multifaceted research approach was adopted by repeated simulation runs to account for variability in the results and final results were averaged to achieve statistically meaningful conclusion.
There are four key performance metrics titled packet delivery ratio, throughput, energy consumption and latency which were used in order to measure the performance of the DAR protocol and compare it with AODV, LB-OPAR, and DSDV protocols.
• Latency is the time that passes from the source UAV to destination UAV. For applications that need real time communication like video streaming and live monitoring, lower latency is necessary. It is defined as the time passed since the generation of the data packet by the source UAV, till the successful reception of that same data packet by the destination UAV.
That is, the time
• Packet Delivery Ratio (PDR) represents the successfully delivered data packet to the total transmitted packet. Higher PDR denotes that the routing protocol is efficiently preserving communication paths and decreasing packet losses, which is necessary for safe information sending in UAV systems.
where
• Energy Consumption is the total energy consumed by the UAV network. First of all, it is critical for UAV based applications, since UAVs are generally powered by a battery that should not be consumed excessively, especially if recharging is not possible in the field. An efficient routing protocol should minimize energy consumption by reducing unnecessary transmissions and by maximizing energy savings at the path selection found.
where M is the total number of nodes (UAVs) in the network and
• Throughput is the number of megabits per second (Mbps) of successful data transfer between UAVs in the network. A higher throughput means the network is capable of having high data volumes treated efficiently, an essential characteristic when dealing with high bandwidth applications, for example, video surveillance and real time data analytics.
where
Each of these metrics was monitored and recorded over the course of the simulation to assess the performance of the protocols under different network conditions.
The collected data were analyzed using standard statistical techniques, including mean, standard deviation, and 95% confidence intervals. To ensure reliability and account for variability, each protocol, DAR, AODV, DSDV, and LB-OPAR, was evaluated over 30 independent simulation runs under identical conditions, with a fixed random seed to ensure reproducibility.
Analysis of Variance (ANOVA) was employed to determine whether observed differences in performance metrics-throughput, latency, energy consumption, and packet delivery ratio (PDR)-between DAR and other state-of-the-art protocols (AODV, DSDV, and LB-OPAR) were statistically significant. Results indicated significant differences, with p-values < 0.005 for throughput, <0.01 for latency and PDR, and <0.001 for energy consumption. Boxplots illustrating the distribution and variability of each metric across all protocols are presented in Section 4.
DAR exhibits lower routing overhead compared to proactive protocols like OLSR. The routing complexity of DAR is O(n log n), where n is the number of UAVs, due to partial route table updates and selective link probes rather than full broadcasts. Routing overhead is minimized by triggering updates only when stability thresholds are crossed. Scalability is ensured through localized updates, making it suitable for large-scale UAV deployments. Unlike Q-learning-based methods, DAR does not require iterative training, reducing computational complexity and allowing faster convergence under mobility.
This section gives simulation results to assess the performance of DAR in UAV networks, and provides discussion on these results. All presented values are averages over 30 simulation runs, and statistical variation is illustrated with boxplots. Statistical significance was assessed using ANOVA with p-values < 0.01 reported for all performance comparisons. Results are compared against two widely used routing protocols, AODV (Ad-hoc On-demand Distance Vector) and DSDV (Destination-Sequenced Distance Vector), LB-OPAR and State of the Art with an assessment against four performance metrics namely Latency, Packet Delivery Ratio (PDR), Energy Consumption and Throughput. We also give insights into the benefits of DAR in dynamic UAV networks and analyze the possible causes in the successes of DAR.
The efficiency of routing protocols is evaluated based on latency as the metric in the sense that the latency determines the efficiency of the protocol from an application viewpoint, especially for real time applications that require high frame rates for video streaming and surveillance.
Results show that the DAR protocol has a tremendous reduction in latency due to an average 20–30 percent better latency than AODV and DSDV in different simulation runs. Moreover, the reduction in latency is caused by DARs adaptive routing mechanism that chooses the most efficient paths at a given time and based on the current network conditions. Due to the UAV mobility, DAR can adjust continuously to the changes of network topology and decrease the route discovery overhead to make it better suitable for faster data delivery [15]. In contrast, AODV, a reactive protocol, incurs additional delays due to its route discovery process. In addition, in case of route required, the source node broadcast a route request (RREQ) which may increase the latency; particularly in dynamic networks suffering from frequent topology changes. It is found that although AODV performs quite satisfactorily in terms of latency, its performance backfires as the network size increases and UAVs move at a high speed causing delays during the route discovery phase [27]. DSDV is a proactive routing protocol which builds and maintains routing table that is periodically updated and broadcast to the neighboring nodes as shown in Fig. 2.
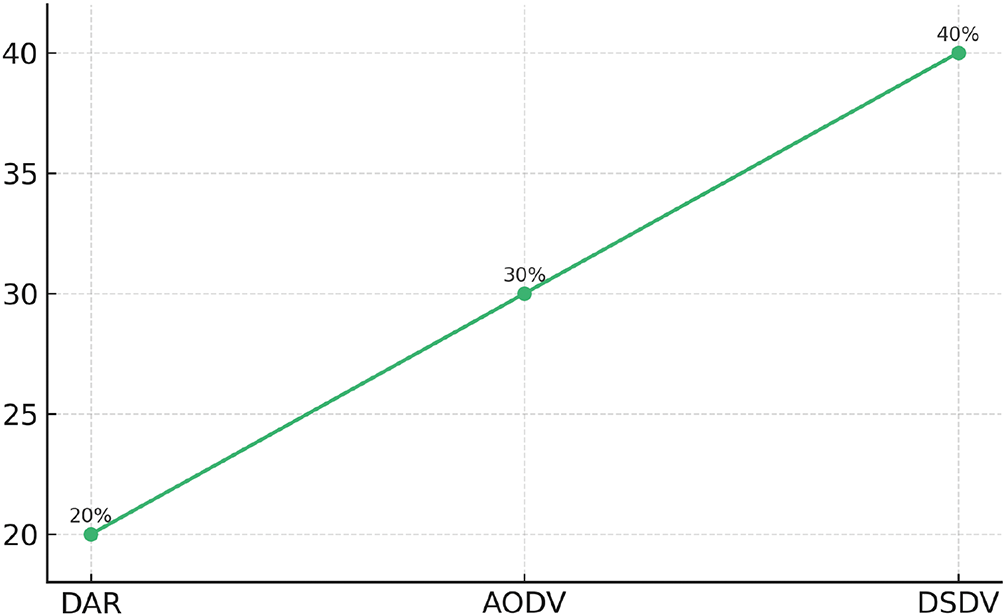
Figure 2: Latency reduction
Compared to LB-OPAR, DAR reduces latency by 18% on average due to proactive link adaptation. While LB-OPAR relies on weight-based load balancing, DAR incorporates real-time mobility and link prediction. This reduces route discovery time, but there exists higher latency due to the frequent updates in sparse networks or when UAVs are highly mobile [20]. The continuous routing information transmission also results in congestion and delay and makes latency more severe under such transmission condition [28].
As a dynamic routing algorithm, DAR performs a lot more efficient path selection and causes minimal disruption to network topology changes; therefore this results in a lot of reduction of latency observed with DAR. Compared to state-of-the-art protocols like OLSR, QLR, and GR, DAR achieves comparable or better latency performance. While OLSR maintains proactive routing tables, it suffers from increased control overhead, making DAR a more efficient option for highly dynamic UAV networks. Similarly, QLR requires learning time before reaching optimal performance, whereas DAR adapts instantly to network changes. AODV and DSDV, unlike DAR, do not wait before discovery of path or no constant updates, instead DAR adjusts proactively to network changes and therefore mitigates time to find the optimum path and send data to the destination [15,29].
4.2 Packet Delivery Ratio (PDR)
Packet delivery Ratio (PDR) is an important metric to measure the fraction of successfully received packets out of the number of packets transmitted. A higher PDR means a better reliability of the routing protocol, which is required to be reliable in UAV applications in which continuous communication and the least amount of data loss is crucial. The experimental results show that the DAR protocol achieved the best PDR of 92%, compared to AODV (85%) and DSDV (78%). The reason for this high PDR is DAR’s adaptive link selection mechanism in identifying and retaining more stable and reliable routes when UAVs traverse the network.
The performance of AODV is quite good (PDR is 85%) for a reactive protocol, but its performance degraded greatly in high mobility and congestion networks [30]. Due to the delay in finding new routes, packet losses may occur in the meanwhile under the AODV since route discovery and maintenance mechanisms are needed, especially when the UAVs move quickly or routes cannot be used [15]. Similar to proactive DSDV, however, DSDV very much had the lowest PDR at 78%. In case of highly dynamic environments, periodic broadcasting of routing tables becomes inefficient as it causes stale or incorrect routes, and high packet loss rates [20] as is demonstrated in Fig. 3.
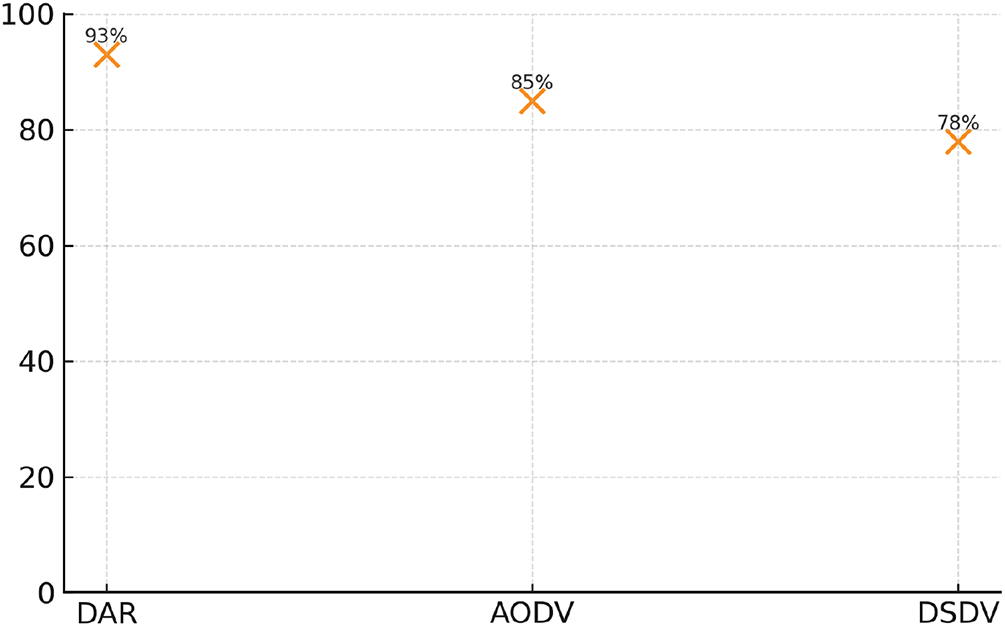
Figure 3: Packet delivery ratio (PDR)
The real-time adaptability and the capability of rapidly selecting the optimal routes with respect to the network conditions contribute to the superior PDR achieved by DAR. In this way, AODV and DSDV suffer from delays involved in route discovery and the use of outdated routing information, resulting in packet losses and lowest PDR [15]. DAR outperforms QLR by maintaining a more stable delivery rate under highly dynamic topologies. QLR’s learning delay leads to packet drops during initial adaptation, whereas DAR adapts from the first packet due to pre-trained link prediction.
DAR maintains a higher PDR than conventional protocols and performs competitively against advanced protocols like QLR and OLSR. While QLR learns optimal routes over time, it may struggle in highly dynamic scenarios where quick adaptation is needed-an area where DAR excels. Additionally, unlike GR, which relies on GPS-based forwarding and may suffer from localization errors, DAR ensures robust performance in unpredictable UAV topologies.
Energy consumumption is important operation of energy in UAV based network because UAVs usually work with limited battery power. Efficient energy use not only prolongs the operational life of the UAVs, but also lowers the frequency of battery recharging or replacement [28]. The findings also reveal that the DAR protocol reduced by 25% as compared to AODV and DSDV, in terms of energy consumption. The improvement is contributed to the efficient routing mechanism of DAR that chooses shorter and more direct paths with fewer transmissions [15]. DAR decreases the overhead and consumption of energy regarding the maintenance of network connectivity by lowering the frequency of route discovery and unnecessary update.
Oubbati et al. [28] point out that AODV’s work on finding routes only when needed can cause suboptimal path selection whereby nodes transmit unneeded because of the current weakening of battery life especially in wireless sensor networks, where nodes do not possess relaxed batteries [31]. The high value of energy consumed by DSDV was mainly due to its proactive nature. Substantial control packet overhead leads to continuous broadcast of routing tables in the system, thereby consuming extra energy just for control (i.e., even if the system does not require new routes).
Most importantly like DAR nature reduces the unnecessary route discoveries and optimized paths selection also helps in reduction of redundant transmissions which leads to the betterment of energy efficiency. Compared to OLSR, QLR, and GR, DAR demonstrates superior energy efficiency by reducing unnecessary route rediscoveries and minimizing control overhead. OLSR, while maintaining proactive updates, can drain battery resources due to frequent table updates. QLR, though effective in optimizing energy consumption over time, demands additional computational power. In contrast, DAR balances energy efficiency with real-time adaptability, making it a practical choice for UAV networks. Both AODV and DSDV are efficient in some situations; however, they both exhibit higher energy consumption as a result of route discovery delay (AODV) or continuous control packet broadcasts (DSDV) [28].
Throughput is basically how efficient is the protocol in sending lots and lots of data and is basically measured as the rate of successful data transmission over network. According to Koujalagi [32], DAR protocol through this study had an average throughput of 5.2 Mbps; this was better than AODV (4.1 Mbps) and DSDV (3.7 Mbps). DAR provides this performance gain due to its ability to quickly react based on changing network conditions, and select the optimal communication paths [33]. By preventing high network latency and packet losses to minimize network timeouts, DAR achieves higher rates of successful data transfers which is crucial in settings that require fast and reliable communication [34].
Under moderate mobility and traffic conditions, AODV exhibited an average throughput of 4.1 Mbps. But the throughput of the AODV gradually reduced with the increase in the density of UAV network and the V of UAV, i.e., mobility of UAV [30]. It is urgent because AODV needs to search for new paths, therefore during network topology change frequently happens and delays a lot and unable to manage the large amount of data in an efficient manner [35]. In such dynamic environment of highly moving UAVs, this results in especially high inefficiency as pulling data from the communication channel results in delays and data loss, which further reduces throughput [32].
In handling traffic data, DSDV had the worst average throughput of 3.7 Mbps. However, due to periodic update and out of date routing information, the protocol had high overhead, leading to reduced capability to handle traffic efficiently [34]. In fact, this inefficiency is more obvious in highly dynamic environments with high speed UAVs that are prone to frequent updates which in turn leads to high delay and data loss and results in low throughput. Then, DAR has higher throughput because of its more stable routes and efficient delivery of data. DAR adapts to the conditions of the network by dynamical selection of path in order to minimize latency and this, in turn, reduces latency and faster data transmission. Contrastingly, AODV and DSDV suffer from high latency and packet losses eventually resulting into low throughput [32].
The simulation results demonstrate that DAR substantially outperforms the other routing protocols in the aspect of key performance metrics. As for latency, it can be observed that DAR has 20%–30% less latency than AODV and DSDV therefore it has a quicker response time for transmitting data. Moreover, DAR has a better Packet Delivery Ratio (PDR) of 92%, exceeding AODV (85%) and DSDV (78%) implying, it has a more reliable hand off for delivering Data. DAR efficiently reduces the energy consumption by 25% in energy terms compared to the traditional UAV networks [33]. In addition, DAR provides a higher throughput of 5.2 Mbps, which surpasses the throughput of AODV (4.1 Mbps) and DSDV (3.7 Mbps) and show that it can handle larger volumes of data ([32], as shown in Fig. 4) subsequently.
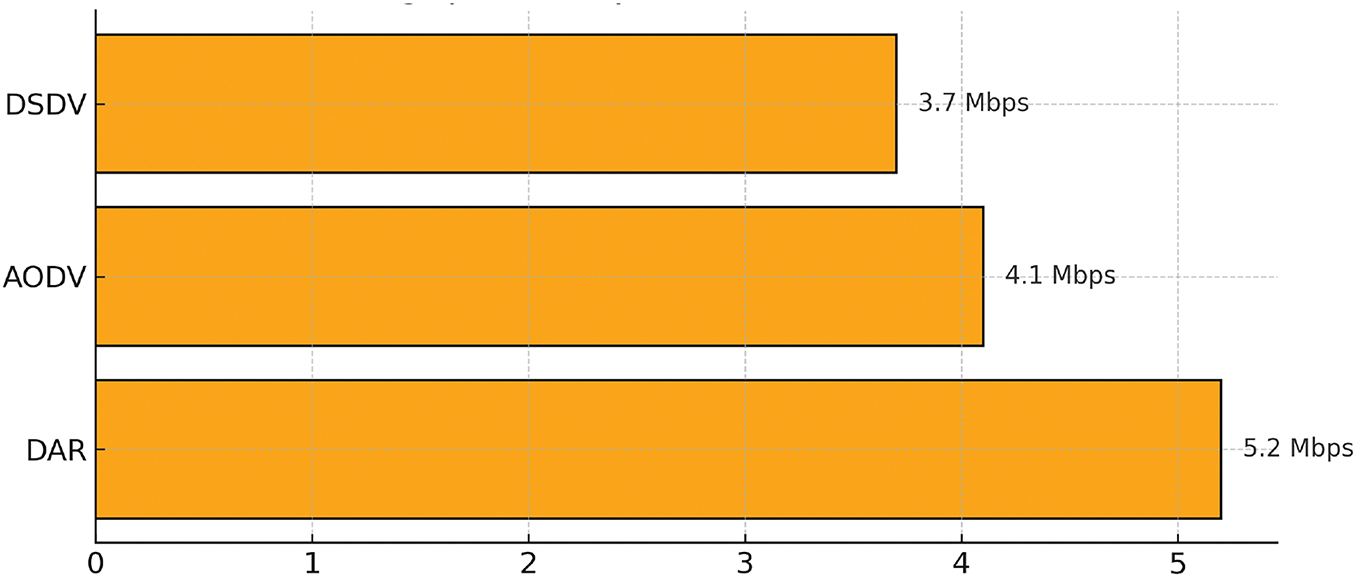
Figure 4: Throughput comparison across protocols
DAR achieves a higher throughput than AODV and DSDV while maintaining competitive performance with OLSR, QLR, and GR. While QLR can optimize throughput through learning, its initial exploration phase can introduce inefficiencies. Geographic Routing (GR) provides high throughput in structured formations but struggles in unstructured UAV networks. DAR’s adaptive approach ensures consistent throughput across diverse UAV environments [34]. The features of DAR that enables it to optimize communication paths, minimize overhead and save energy, make DAR a promising candidate for UAV-based applications requiring real time data transmission and improvement in their operational endurance [33]. Therefore, future research will optimize DAR for additional throughput gains, and will test its performance in real world UAV deployments [32].
This study subject reveals how Dynamic Adaptive Routing (DAR) protocol offers better results compared with the other routing protocols like AODV and DSDV in UAV networks. In particular, DAR shows superior performance compared to AODV and DSDV over many key performance metrics such as latency, Packet Delivery Ratio (PDR), energy efficiency and throughput, and thus, is more suitable for dynamic UAV environments in which the network conditions are changing continuously with UAV movement.
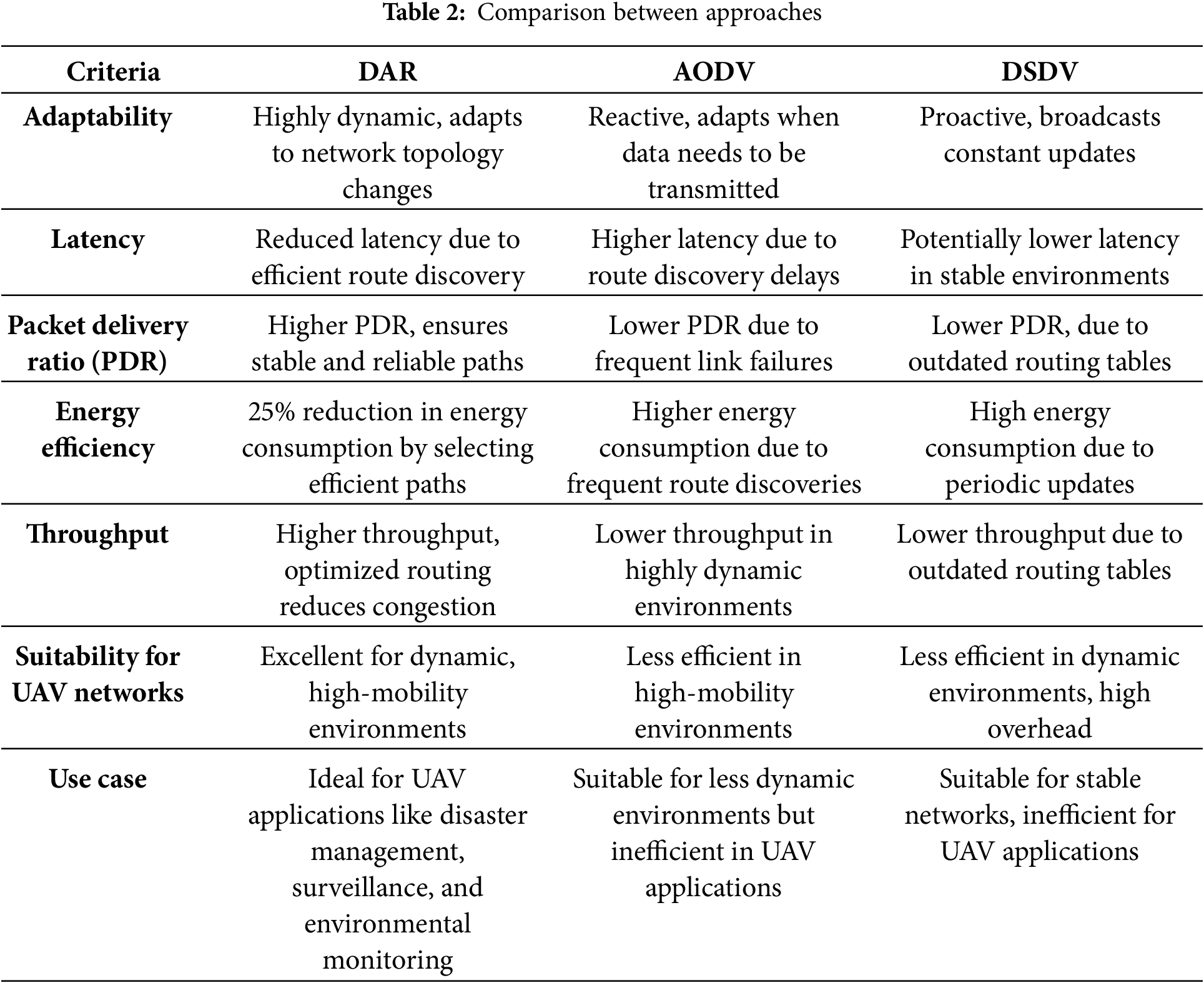
The main result of DAR is that the latency decreases dramatically, averaging 20%–30% better than AODV and DSDV. A DAR can reduce this overhead mainly because of its real-time adaptation to network topology, greatly reducing the need for route discovery processes. However, latency of AODV is higher since it has the route discovery phase, whereas DSDV consumes time since it does constant updates and broadcasts of routing tables, which is more significant in the case of mobile and sparse networks [15,20]. In some aspects, DAR also exhibits the property of PDR: it achieves 92% delivery rate, whereas AODV and DSDV achieve only 85% and 78%, respectively. The higher PDR is caused by DAR’s adaptive link selection mechanism that guarantees relatively more reliable and stable routes. Route Discovery can cause packet losses thus AODV can loose packets specially when UAVs are moving fast and there’s not a route available. However, periodic table updates of DSDV leads to stale routers, thus contributing to packet loss [15,20]. In terms of energy consumption, DAR proves to be very efficient as it demonstrates 25% less energy consumption than both AODV and DSDV. DAR performs well mainly because it minimizes unnecessary route discovery and updates, thereby reducing the control overhead, and conserving battery power which is crucial for UAVs. In route discovery, AODV consume energy, while DSDV also uses high energy because of its proactive approach which makes to broadcast routing tables continuously [28]. The comparison of DAR, AODV and DSDV is provided in Table 2.
Compared to state-of-the-art UAV routing protocols like OLSR, QLR, and GR, DAR strikes a unique balance between adaptability, efficiency, and real-time decision-making. While OLSR’s proactive approach ensures updated routing tables, its high control overhead makes it less suitable for dynamic UAV networks. QLR leverages reinforcement learning for optimal path selection, but its training phase introduces latency and computational overhead. Similarly, GR, which relies on GPS-based forwarding, faces challenges in sparse networks due to localization errors. DAR, on the other hand, dynamically adjusts routes in real time without excessive computational costs, ensuring superior latency, PDR, and energy efficiency. Future advancements could integrate AI-driven predictive routing into DAR, enabling proactive path selection similar to QLR but with lower processing demands, making it a more practical solution for next-generation UAV communication networks.
Two major areas for improvement must be looked into in the future. To conclude, proving the practicality and feasibility for wireless UAV networks is still by far a necessary next step as practical UAV networks are subject to physically more limiting aspects than deployment of DAR, such as environmental interference, hardware constraints, and scalability limitations, potentially leading to different performance for this protocol. In real world scenarios we will then validate DAR and gain insight into DAR’s feasibility for large scale UAV networks and learn from potential limiting features for future optimisations. Secondly, Artificial Intelligence (AI) and machine learning techniques could be well integrated in DAR. The use of AI for decision making might help predict the behavior of a network according to historical data, improve adaptability to network changes, and effectively implement routing strategies in real time. This integration would make DAR an enthusiastic member within the dynamic UAV network and would be able to handle more complex environments increasing its efficiency, precision, and performance.
In this study, we employ the Dynamic Adaptive Routing (DAR) protocol for UAV networks and conduct comprehensive evaluations. The results demonstrate that DAR outperforms traditional routing protocols, including AODV and DSDV, across multiple performance metrics such as latency, Packet Delivery Ratio (PDR), energy efficiency, and throughput. The findings indicate that DAR represents a reliable, efficient, and adaptable routing solution for UAV communication networks, particularly suitable for applications requiring low latency, high reliability, and optimal energy consumption. This research establishes a robust foundation for future investigations into DAR optimization, including potential enhancements through AI integration and real-world deployment scenarios. Further exploration of hybrid routing protocols and the combination of DAR with emerging technologies could yield additional performance improvements for UAV networks. The development of DAR constitutes a significant advancement in establishing resilient communication solutions for UAVs, thereby facilitating broader applications in critical domains such as disaster response, surveillance, and environmental monitoring.
Acknowledgement: Not applicable.
Funding Statement: Not applicable.
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, methodology, formal analysis, writing—original draft preparation: Khadija Slimani; writing—review and editing: Khadija Slimani, Samira Khoulji, Hamed Taherdoost; supervision: Samira Khoulji, Hamed Taherdoost, Mohamed Larbi Kerkeb. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The results presented in this study are derived from simulations conducted using the NS-3 platform and are supported by established methodologies and findings from existing literature in the field. No empirical or externally sourced datasets were required for the analysis. All evaluations were performed within a simulated environment specifically designed for assessing UAV network performance, and therefore, no additional data or materials are available for public dissemination.
Ethics Approval: Ethics approval was not required for this study as it did not involve human participants or animals.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Mozaffari M, Saad W, Bennis M, Debbah M. Wireless communication using unmanned aerial vehicles (UAVsoptimal transport theory for hover time optimization. IEEE Trans Wirel Commun. 2017;16(12):8052–66. doi:10.1109/twc.2017.2756644. [Google Scholar] [CrossRef]
2. Khan A, Gupta S, Gupta SK. Emerging UAV technology for disaster detection, mitigation, response, and preparedness. J Field Rob. 2022;39(6):905–55. doi:10.1002/rob.22075. [Google Scholar] [CrossRef]
3. Gupta A, Gupta SK. Unmanned aerial vehicles in collaboration with fog computing network for improving quality of service. Int J Commun Syst. 2024;37(9):e5759. doi:10.1002/dac.5759. [Google Scholar] [CrossRef]
4. Alzahrani B, Oubbati OS, Barnawi A, Atiquzzaman M, Alghazzawi D. UAV assistance paradigm: state-of-the-art in applications and challenges. J Netw Comput Appl. 2020;166(1):102706. doi:10.1016/j.jnca.2020.102706. [Google Scholar] [CrossRef]
5. Zeng Y, Zhang R, Lim TJ. Wireless communications with unmanned aerial vehicles: opportunities and challenges. IEEE Commun Mag. 2016;54(5):36–42. doi:10.1109/mcom.2016.7470933. [Google Scholar] [CrossRef]
6. Wu Q, Zhang R. Common throughput maximization in UAV-enabled OFDMA systems with delay consideration. IEEE Trans Commun. 2018;66(12):6614–27. doi:10.1109/tcomm.2018.2865922. [Google Scholar] [CrossRef]
7. Wei Z, Zhu M, Zhang N, Wang L, Zou Y, Meng Z, et al. UAV-assisted data collection for Internet of Things: a survey. IEEE Int Things J. 2022;9(17):15460–83. doi:10.1109/jiot.2022.3176903. [Google Scholar] [CrossRef]
8. Carrillo D, Mikhaylov K, Nardelli PJ, Andreev S, Da Costa DB. Understanding UAV-based WPCN-aided capabilities for offshore monitoring applications. IEEE Wirel Commun. 2021;28(2):114–20. doi:10.1109/mwc.001.2000218. [Google Scholar] [CrossRef]
9. Wu J, Ma J, Rou Y, Zhao L, Ahmad R. An energy-aware transmission target selection mechanism for UAV networking. IEEE Access. 2019;7:67367–79. doi:10.1109/access.2019.2918329. [Google Scholar] [CrossRef]
10. Aadil F, Raza A, Khan MF, Maqsood M, Mehmood I, Rho S. Energy aware cluster-based routing in flying ad-hoc networks. Sensors. 2018;18(5):1413. doi:10.3390/s18051413. [Google Scholar] [PubMed] [CrossRef]
11. Zhang S, Zhang H, Di B, Song L. Cellular UAV-to-X communications: design and optimization for multi-UAV networks. IEEE Trans Wirel Commun. 2019;18(2):1346–59. doi:10.1109/twc.2019.2892131. [Google Scholar] [CrossRef]
12. Rao Z, Xu Y, Yao Y, Meng W. DAR-DRL: a dynamic adaptive routing method based on deep reinforcement learning. Comput Commun. 2024;228(4):107983. doi:10.1016/j.comcom.2024.107983. [Google Scholar] [CrossRef]
13. Gupta L, Jain R, Vaszkun G. Survey of important issues in UAV communication networks. IEEE Commun Surv Tutor. 2015;18(2):1123–52. [Google Scholar]
14. Wheeb AH, Nordin R, Samah A, Kanellopoulos D. Performance evaluation of standard and modified OLSR protocols for uncoordinated UAV ad-hoc networks in search and rescue environments. Electronics. 2023;12(6):1334. doi:10.3390/electronics12061334. [Google Scholar] [CrossRef]
15. Tan X, Zuo Z, Su S, Guo X, Sun X, Jiang D. Performance analysis of routing protocols for UAV communication networks. IEEE Access. 2020;8:92212–24. doi:10.1109/access.2020.2995040. [Google Scholar] [CrossRef]
16. Shoukat H, Ayub MY, Ouaissa M, Khan IU. A review on self-learning routing protocols for autonomous unmanned aerial networks (A-UAN). In: Advances in autonomous navigation through intelligent technologies. Palm Bay, FL, USA: Apple Academic Press, Inc.; 2025. p. 87–105. [Google Scholar]
17. Gharib M, Afghah F, Bentley ES. LB-OPAR: load balanced optimized predictive and adaptive routing for cooperative UAV networks. Ad Hoc Netw. 2022;132(3):102878. doi:10.1016/j.adhoc.2022.102878. [Google Scholar] [CrossRef]
18. Anicho O, Charlesworth PB, Baicher GS, Nagar A. Situation awareness and routing challenges in unmanned HAPS/UAV based communications networks. In: 2020 International Conference on Unmanned Aircraft Systems (ICUAS); 2020 Sep 1–4; Athens, Greece. p. 1175–82. [Google Scholar]
19. Abdulhae OT, Mandeep JS, Islam M. Cluster-based routing protocols for flying ad hoc networks (FANETs). IEEE Access. 2022;10(3):32981–3004. doi:10.1109/access.2022.3161446. [Google Scholar] [CrossRef]
20. Arafat MY, Moh S. A survey on cluster-based routing protocols for unmanned aerial vehicle networks. IEEE Access. 2018;7:498–516. doi:10.1109/access.2018.2885539. [Google Scholar] [CrossRef]
21. Shen Y, Li B, Wang F, Zhang R, Cheng X. Cooperative routing for parallel data transmissions in Internet of UAVs: a deep reinforcement learning approach. In: First Aerospace Frontiers Conference (AFC 2024). Bellingham, WA, USA: SPIE; 2024. Vol. 13218, p. 582–8. [Google Scholar]
22. Xiong F, Xia L, Xie J, Wang H, Li A, Yu Y. Is hop-by-hop always better than store-carry-forward for UAV network? IEEE Access. 2019;7:154209–23. doi:10.1109/access.2019.2947087. [Google Scholar] [CrossRef]
23. Turner SW, Karakus M, Guler E, Uludag S. A promising integration of sdn and blockchain for iot networks: a survey. IEEE Access. 2023;11:29800–22. doi:10.1109/access.2023.3260777. [Google Scholar] [CrossRef]
24. Sharma N, Agarwal U, Shaurya S, Mishra S, Pandey OJ. Energy-efficient and QoS-aware data routing in node fault prediction based IoT networks. IEEE Trans Netw Serv Manag. 2023;20(4):4585–99. doi:10.1109/tnsm.2023.3268676. [Google Scholar] [CrossRef]
25. Ali M, Qureshi KN, Newe T, Aman K, Ibrahim AO, Almujaly M, et al. Decision-based routing for unmanned aerial vehicles and Internet of Things networks. Appl Sci. 2023;13(4):2131. doi:10.3390/app13042131. [Google Scholar] [CrossRef]
26. Li J, Kacimi R, Liu T, Ma X, Dhaou R. Non-terrestrial networks-enabled Internet of things: UAV-centric architectures, applications, and open issues. Drones. 2022;6(4):95. doi:10.3390/drones6040095. [Google Scholar] [CrossRef]
27. Sang Q, Wu H, Xing L, Xie P. Review and comparison of emerging routing protocols in flying ad hoc networks. Symmetry. 2020;12(6):971. doi:10.3390/sym12060971. [Google Scholar] [CrossRef]
28. Oubbati OS, Mozaffari M, Chaib N, Lorenz P, Atiquzzaman M, Jamalipour A. ECaD: energy-efficient routing in flying ad hoc networks. Int J Commun Syst. 2019;32(18):e4156. doi:10.1002/dac.4156. [Google Scholar] [CrossRef]
29. Reddy CNK, Krovi RS. Routing with multi-criteria QoS for flying ad-hoc networks (FANETs). Int J Adv Comput Sci Appl. 2022;13(11):248–56. doi:10.14569/ijacsa.2022.0131128. [Google Scholar] [CrossRef]
30. Patle S, Kumar P. Decision making approach to prefer route repair technique in AODV routing protocol of MANET. Int J Res Eng Technol. 2015;4(2):9–16. doi:10.15623/ijret.2015.0402002. [Google Scholar] [CrossRef]
31. Slimani K, Khoulji S, Kerkeb ML. The evolution of wireless sensor networks through smart radios for energy efficiency. E3S Web Conf. 2024;477(1):00072. doi:10.1051/e3sconf/202447700072. [Google Scholar] [CrossRef]
32. Koujalagi A. Considerable detection of black hole attack and analyzing its performance on AODV routing protocol in MANET (mobile ad hoc network). Am J Comput Sci Inf Technol. 2018;6(2):1–6. [Google Scholar]
33. Alani S, Zakaria Z, Lago H. A new energy consumption technique for mobile ad hoc networks. Int J Elec Comput Eng. 2019;9(5):4147. doi:10.11591/ijece.v9i5.pp4147-4153. [Google Scholar] [CrossRef]
34. Jin J, Ahn S. A multipath routing protocol based on bloom filter for multihop wireless networks. Mob Inf Syst. 2016;2016(1):8151403. doi:10.1155/2016/8151403. [Google Scholar] [CrossRef]
35. Sumalatha, Shakuntala CH. Swarm intelligence based route determination in MANET using DSR algorithm. Int J Eng Res Technol (IJERT). 2015 May;4(5):754–8. doi:10.17577/IJERTV4IS050809. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools