
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

VHO Algorithm for Heterogeneous Networks of UAV-Hangar Cluster Based on GA Optimization and Edge Computing
1 School of Information and Automation Engineering, Qilu University of Technology (Shandong Academy of Sciences), Jinan, 250300, China
2 School of Electronics and Information, Aerospace Information Technology University, Jinan, 250200, China
3 School of Mechanical Engineering, Qilu University of Technology (Shandong Academy of Sciences), Jinan, 250300, China
* Corresponding Author: Dongri Shan. Email:
(This article belongs to the Special Issue: Collaborative Edge Intelligence and Its Emerging Applications)
Computers, Materials & Continua 2025, 85(3), 5263-5286. https://doi.org/10.32604/cmc.2025.067892
Received 15 May 2025; Accepted 04 July 2025; Issue published 23 October 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
With the increasing deployment of Unmanned Aerial Vehicle-Hangar (UAV-H) clusters in dynamic environments such as disaster response and precision agriculture, existing networking schemes often struggle with adaptability to complex scenarios, while traditional Vertical Handoff (VHO) algorithms fail to fully address the unique challenges of UAV-H systems, including high-speed mobility and limited computational resources. To bridge this gap, this paper proposes a heterogeneous network architecture integrating 5th Generation Mobile Communication Technology (5G) cellular networks and self-organizing mesh networks for UAV-H clusters, accompanied by a novel VHO algorithm. The proposed algorithm leverages Multi-Attribute Decision-Making (MADM) theory combined with Genetic Algorithm (GA) optimization, incorporating edge computing to enable real-time decision-making and offload computational tasks efficiently. By constructing a utility function through attribute and weight matrices, the algorithm ensures UAV-H clusters dynamically select the optimal network access with the highest utility value. Simulation results demonstrate that the proposed method reduces network handoff times by 26.13% compared to the Decision Tree VHO (DT-VHO), effectively mitigating the ping-pong effect, and enhancing total system throughput by 19.99% under the same conditions. In terms of handoff delay, it outperforms the Artificial Neural Network VHO (ANN-VHO), significantly improving the Quality of Service (QoS). Finally, real-world hardware platform experiments validate the algorithm’s feasibility and superior performance in practical UAV-H cluster operations. This work provides a robust solution for seamless network connectivity in high-mobility UAV clusters, offering critical support for emerging applications requiring reliable and efficient wireless communication.Keywords
UAV-H clusters have begun to be used in fields such as power inspection, fire monitoring, and emergency search and rescue. The net-connected UAV-H cluster, as an essential aid to agricultural development, is particularly suited to the current state of agricultural economic development [1]. The new agrarian production mode of cluster operation based on the crop growth model has been applied. UAV was used as a low-altitude monitoring subject to accurately detect the crop growth situation and implement targeted precision plant protection operations. As a ground platform, the Hangar is used to cluster and coordinate the UAVs, so as to complete the all-around monitoring and operation of crops on a larger scale. The UAV-H cluster operation requires stable and reliable wireless communication between terminal devices. Therefore, it presents a new challenge to the wireless communication of the UAV-H cluster.
The 5G networks boast extensive coverage, high-capacity data transmission, and rapid transfer speeds, which can adequately satisfy the networking demands of a greater number of devices [2]. Consequently, the 5G networks are well-suited to fulfilling the cluster operational networks requirements of UAV-H [3]. The self-organizing wireless mesh networks are a significant communication method for UAV-H clusters, characterized by their lightweight nature, high stability, strong anti-dry ability, and long transmission distance [4]. Murat Bakirci proposed a novel swarm UAV system by compiling the decentralized approach of the Ad Hoc UAV Network into the proposed system [5]. Selecting the routing protocol for the proposed system has resulted in more efficient data transmission, achieved through the minimization of unnecessary broadcasting and reduced network congestion.
However, in the agricultural field environment, the UAV-H operates in a harsher environment with a wider working range, and it is challenging to meet the communication needs of the UAV-H cluster by using any single communication network and networking protocol [6]. If the UAV is in a weak signal area for a long time, it will significantly affect the business efficiency, and may even cause the loss of contact, which will lead to more serious consequences. Heterogeneous communication networks have become a research hotspot in the field of UAV-H cluster communication. Heterogeneous communication networks combine different communication networks, and the communication links of varying communication networks can give full play to their strengths [7]. The dual-link heterogeneous communication networks integrating 5G cloud communication networks and self-organizing wireless mesh networks are applied to the UAV-H cluster, which can well meet the actual communication requirements of the cluster. In heterogeneous networks, UAV-H selects the best access networks, resulting in the concept of Always Best Connected (ABC) [8,9]. In the context of heterogeneous network environments, UAV-H frequently undergoes network handoff, which poses a significant challenge to the handoff problem between heterogeneous networks. VHO assists UAV-H in selecting the optimal network access, thereby ensuring a better guarantee of QoS. Inaccurate VHO judgment has been shown to cause the terminal to switch back and forth between multiple networks, resulting in the ping-pong effect [10]. However, the existing VHO algorithm uses a single index and its performance lags. Alternatively, it combines AI technology while obtaining powerful performance, but it also causes extremely high delay and computing resource overhead, which makes it challenging to apply to UAV-H clusters that are sensitive to delay and computing overhead. Therefore, it is worthwhile to design an efficient and accurate VHO algorithm to reduce the ping-pong effect, improve the utilization of system resources, and guarantee the QoS of high-speed UAVs in heterogeneous networks in UAV-H cluster heterogeneous networks systems.
1.2 Major Contribution of this Paper
In this study, a heterogeneous network architecture and the corresponding VHO algorithm for the UAV-H cluster are proposed. The main contributions are as follows:
(1) A heterogeneous network architecture for UAV-H cluster combining 5G networks with self-organizing mesh networks. The heterogeneous network architecture is based on the technical logic of edge computing so that the UAV-H cluster can maintain excellent network connectivity in complex environments.
(2) A VHO algorithm for the proposed heterogeneous network architecture. The VHO algorithm is predicated on MADM theory and establishes an attribute matrix for the five networks’ attributes of RSS, channel capacity, delay, packet loss rate, and cost. It also establishes an initial weight matrix for the five attributes based on the AHP method, obtains the initial weights, removes the subjective influence of the AHP to get the optimal weights based on GA optimization, and establishes the network utility function by using the attribute matrix and the weight matrix to enable UAV-H always to choose to access the networks with the best utility function. The algorithm has excellent performance, moderate computational complexity, and handoff delay, and computational overhead can be kept in an ideal range.
(3) The proposed algorithm is subjected to effectiveness experiments, network handoff count comparison experiments with RSS-based VHO and DT-VHO, as well as a comparison of the total system throughput and ping-pong handoff probabilities of these algorithms. The proposed algorithm is experimentally compared with RSS-based VHO and ANN-VHO for average handoff delay. The experimental results demonstrate that the proposed method has superior performance, effectively reducing the ping-pong effect, and has a better handoff delay performance, which significantly improves the QoS.
In recent years, a significant number of VHO algorithms have been proposed in the literature. These VHO algorithms can be roughly divided into three categories: traditional class, MADM class, and Artificial Intelligence (AI) class.
Traditional class. In a previous study, Chiussi et al. proposed a traditional Received Signal Strength (RSS) based VHO algorithm. This algorithm uses RSS as a decision parameter [11]. Xie et al. refined the RSS threshold-based algorithm on this basis [12]. The algorithm is characterized by its simplicity in design and low complexity. However, its implementation in today’s more complex heterogeneous networks has proven challenging, and it is unable to mitigate the ping-pong effect effectively.
MADM class. Vulic et al. proposed a heterogeneous model for multiple networks, where the handoff process is based on the well-proven control mechanisms and protocols of the Universal Mobile Telecommunications System (UMTS) [13]. Shao and Li proposed a broadcast mechanism based on MADM theory to prevent network congestion caused by group switching, to solve the problem of network congestion caused by group handoff [14]. Wang et al. proposed a self-selecting multi-attribute algorithm based on Decision Tree (DT). This algorithm is efficacious in improving user QoS and reducing handoff times [15]. Ma et al. proposed a robust VHO algorithm based on Decision Tree (DT-VHO). This pioneering algorithm uses Kalman filtering and combines the respective noise deviation to make a more accurate network attribute estimation. Furthermore, it improves the accuracy of algorithmic judgment through secondary detection, which improves the handoff judgment accuracy and the total network throughput [16]. Jahangeer et al. proposed a Hybrid Cat Swarm Optimization Algorithm for vertical handoff in heterogeneous networks and proved that it has better performance [17]. Goudarzi et al. formulated the VHO decision problem as a Markov decision process, with the objective being to maximize the expected total return and minimize the average number of handoffs. Subsequently, an improved GA and simulated annealing were introduced to obtain a set of optimal decisions, which can effectively reduce the computation time and guarantee user QoS [18]. The performance of these algorithms is significantly better than that of traditional algorithms, and the computational overhead is not high, so they are suitable for UAV-H clusters that are sensitive to handoff delay and computational overhead.
AI class. Some authors have investigated a multi-attribute intelligent VHO algorithm based on fuzzy logic and Artificial Neural Networks (ANN) [19–22], such as combining Kalman filters with a fuzzy logic algorithm to propose an improved VHO algorithm [19]. Or a neural network-based algorithm that improves the ability to adapt to network variability [20]. In [21], the authors consider the Quality of Experience (QoE) in the VHO algorithm. The authors in [22] proposed a VHO algorithm based on Q-learning. The algorithm proposes an RNN-based QoE evaluation mechanism, which further improves the QoE. Frometa Fonseca et al. proposed a Prediction-model-assisted reinforcement learning algorithm for handover decision-making in hybrid networks. They designed a classification model to predict the type of user’s trajectory and assist a Reinforcement Learning (RL) algorithm to make handover decisions that are automatically adapted to new network conditions [23]. Ke et al. proposed an adaptive handoff algorithm for user trajectory prediction based on an improved hidden Markov model. The proposed algorithm can effectively reduce the number of handoffs during fast walking [24]. The algorithms above possess considerable data processing capabilities and excellent performance; however, their complexity renders them unsuitable for utilization in UAV devices with limited computational resources.
These three types of algorithms have their own advantages and disadvantages. Considering the current development status and actual needs of the UAV-H cluster, the MADM VHO algorithm is still the mainstream choice of the UAV-H cluster.
3.1 Network Architecture and Algorithm Overview
The heterogeneous network architecture proposed in this paper is illustrated in Fig. 1. The 5G Base Station (BS) is deployed on the ground, and both the UAVs and the Hangar equipment are equipped with 5G modules and self-organizing mesh network modules. The Hangar is an intelligent, mobile and networked hangar, which has the function of deploying the UAV cluster control center. It can carry the UAV cluster to the operation site and control the UAV cluster to perform relevant tasks through the network. In areas where the 5G signal is strong, the UAVs and the Hangar device are connected to the 5G networks via a 5G BS and communicate using the 5G networks. In areas where the signal is weak, the UAVs use the self-organizing mesh networks to communicate with other UAVs.
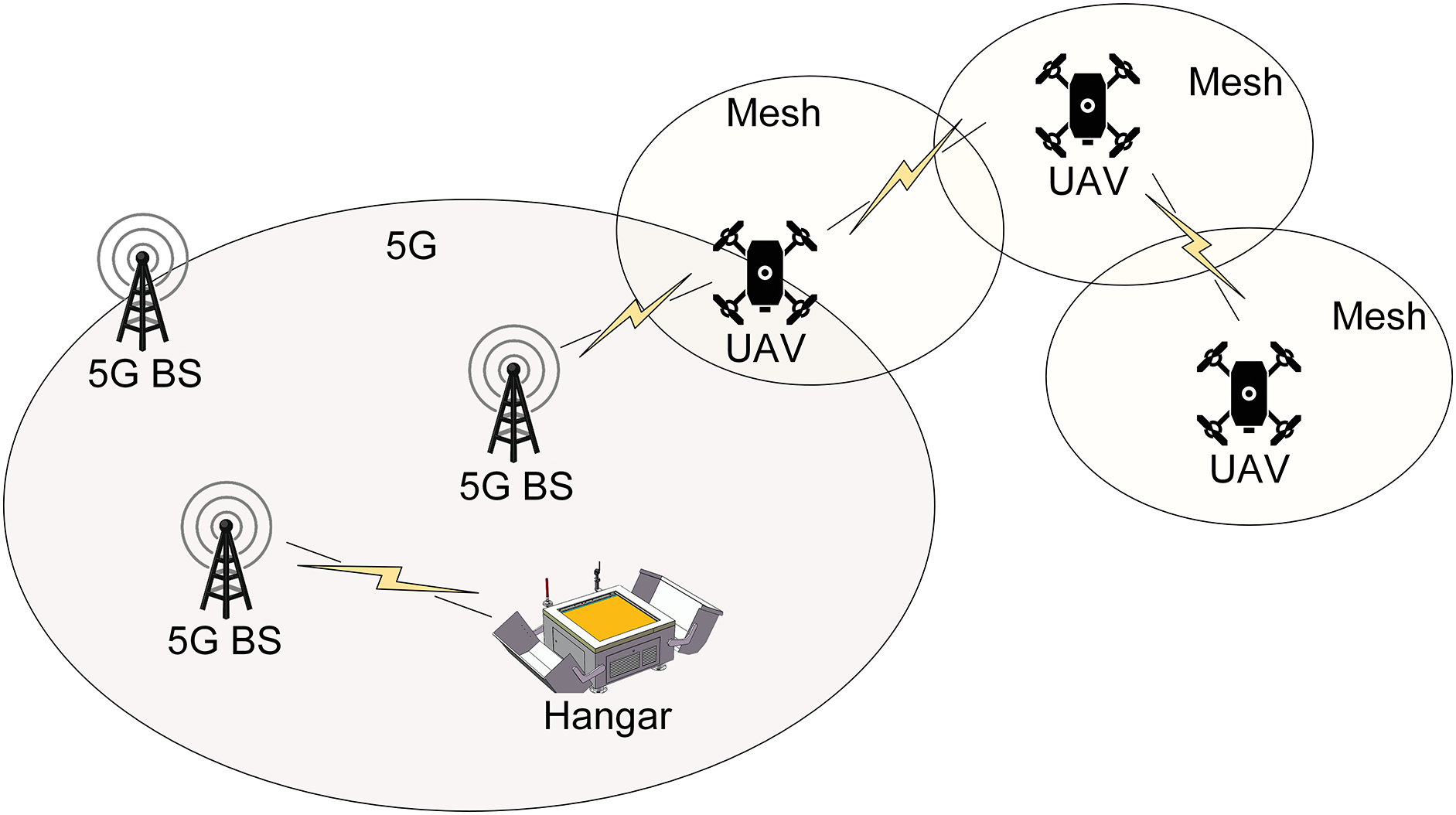
Figure 1: The heterogeneous network architecture
The heterogeneous network architecture is based on the technical logic of edge computing: “close to the terminal, real-time processing, elastic collaboration”. Both UAV and Hangar devices can be connected to the cloud server through 5G network. The Hangar is used as a region-level edge server to carry the unified control function of the cluster system. Offload the weight optimization calculations from UAVs, which have limited CPU. The Hangar equipment will be more responsible for complex computing tasks. The UAV is used as an end node to deploy the VHO algorithm, forming a “cloud-edge-end” collaborative distributed computing architecture. Through the marginal deployment of computing nodes, the local real-time processing of network handover decisions in the high-speed mobile scenario of UAV was realized. The distributed characteristics of the Mesh network and the heterogeneous integration of 5G network were used to complete data localized forwarding on the edge side. This architecture is a typical application form of edge computing in mobile heterogeneous network scenarios.
The overall steps of the proposed algorithm in this paper are as follows:
(1) Capture the network’s attribute values in the current environment. These include RSS, channel bandwidth, interference signal power, noise power, packet loss rate, transmission delay, etc.
(2) The calculated RSS value is compared with the preset threshold value, and the networks with RSS values lower than the threshold value are identified as invalid networks to judge the existence of one network or more networks in the current environment.
(3) If only one network exists, this network is selected; if more than one network exists, the values of each attribute are first listed and normalized as an initial attribute matrix, after which the initial weights of the multi-attribute parameters of each network are calculated using AHP.
(4) Optimize the initial weights based on GA to get the best weights after optimization.
(5) Combining the optimal weights and the network’s revenue function, the network’s revenue value of each network is calculated, the residence time is dynamically adjusted according to the objective function, and the decision of whether to execute handoff is made.
Fig. 2 is the overall flowchart of the algorithm.
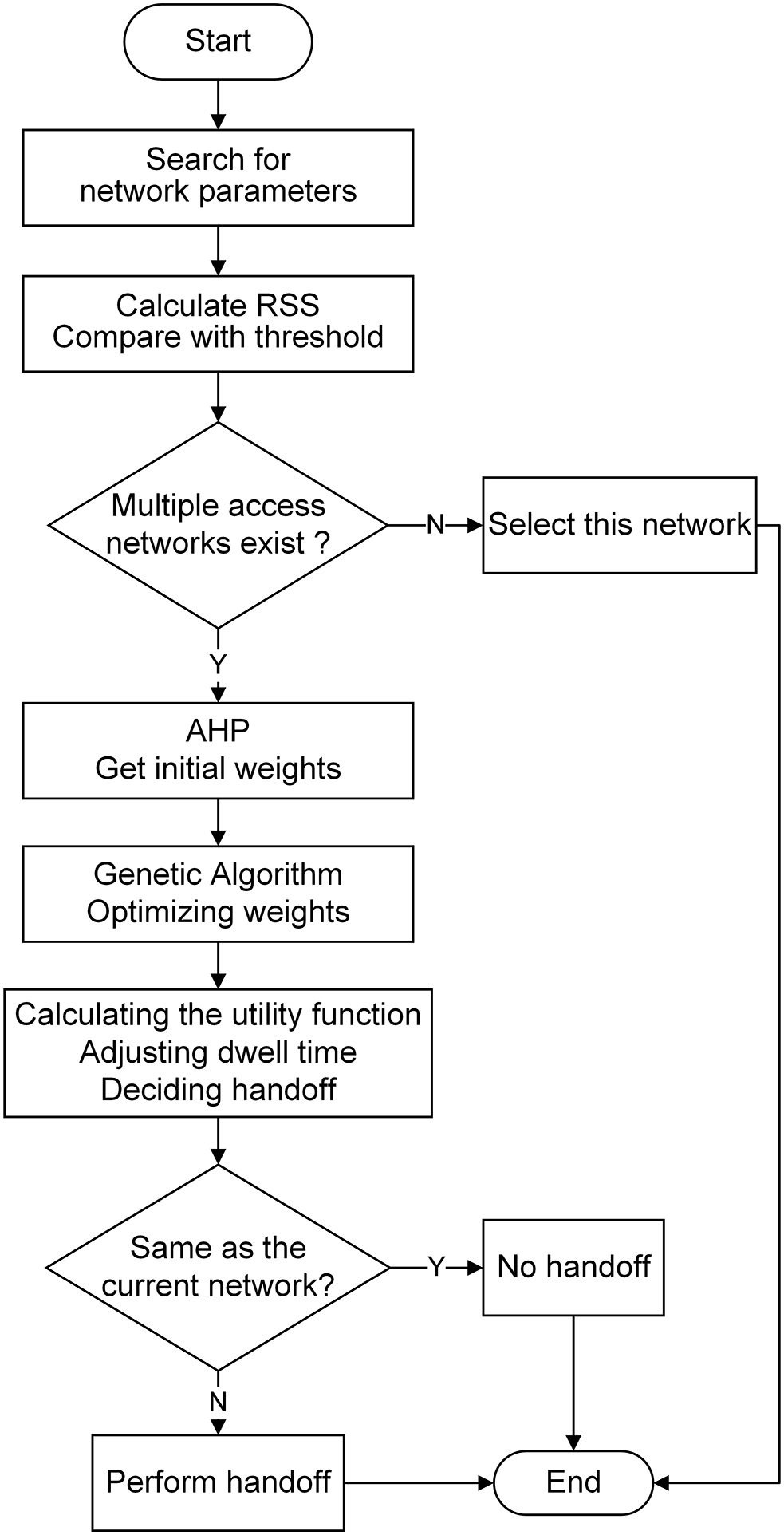
Figure 2: The overall flowchart of the algorithm
3.2 Analytic Hierarchy Process
The MADM used in this paper uses five network attributes, which are RSS, channel capacity, transmission delay, packet loss rate, and cost overhead. Cost overhead is the cost generated by the unit traffic usage of the networks. The five networks attribute values are denoted as
Accordingly, the initial attribute matrix
Among the five network attributes, RSS and channel capacity are benefit attributes, i.e., the larger the value of the attribute, the more favorable it is; delay, packet loss rate, and overhead are cost attributes, i.e., the smaller the value of the attribute, the more favorable it is. Since the attributes are of different types, they need to be normalized. Since RSS values are generally negative, they are normalized using the reciprocal method. The matrix element
The normalized attribute matrix
The normalized values will be used for subsequent utility function calculation and optimization.
The AHP is a well-established multi-attribute weighting algorithm. The AHP is a systematic, simple, flexible, and effective decision-making method that decomposes the elements related to decision-making into multiple levels and carries out qualitative and quantitative analysis on the basis of these levels. The AHP first constructs a hierarchical evaluation model for the VHO problem, identifying the target, attribute, and scenario layers for handoff decisions. The constructed model is shown in Fig. 3.
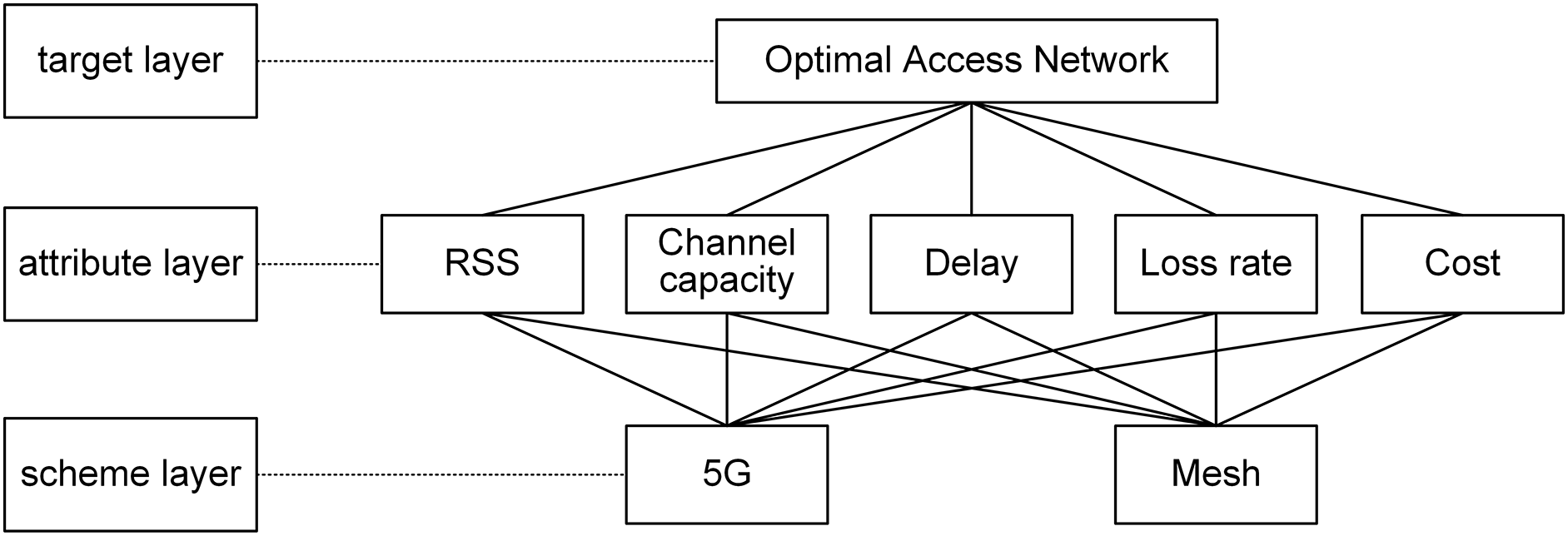
Figure 3: Hierarchical evaluation model
First, the initial weights of the five network attributes need to be given, which are given by combining the actual network requirements and experience. The initial weight matrix
The value of
or
where the value of
The weights of each networks attribute are calculated and normalized to obtain the weight vector
where
After finding the weights, the maximum characteristic root
Afterward, the matrix needs to be tested for consistency to determine if there are logical problems with the constructed matrix and to ensure the validity of the resulting weights. The consistency test method is as follows:
where
When
At this point, the initial weights of the five attributes of the candidate networks are obtained
In the aforementioned steps, the initial weights of the five attributes are obtained by AHP. However, AHP is highly dependent on the judgment of decision-makers or experts, which can lead to a deviation in results when the judgment of decision-makers is overly influenced by their subjective preferences or knowledge limitations, thereby producing a distortion of the objective laws. GA has been developed to address these limitations by optimizing the judgment matrix of AHP. These algorithms simulate the natural selection and evolution process to enhance the stability and reliability of the decision-making results.
Prior to implementing a GA optimization process, it is imperative to establish the optimization objective function. In scenarios where the disparity in utility value between two networks is pronounced, the networks with the superior utility can be identified. Consequently, the efficacy of the judgment is maximized. The optimization objective function, designated as
where
The GA used in this paper to optimize the weights is as follows:
(1) Initialize the population
(2) Calculate the individual
(3) Selection operation. Selection of good individuals from the population for crossover and mutation. Selection is carried out using roulette, a selection strategy based on fitness proportions, and the probability
(4) New individuals were generated by the crossover operation with a crossover rate
(5) New individuals are added to the population
(6) If the algorithm is not complete, go to step 3 to continue the iteration. When done, print the result.
Fig. 4 shows the overall flow chart of GA optimization.
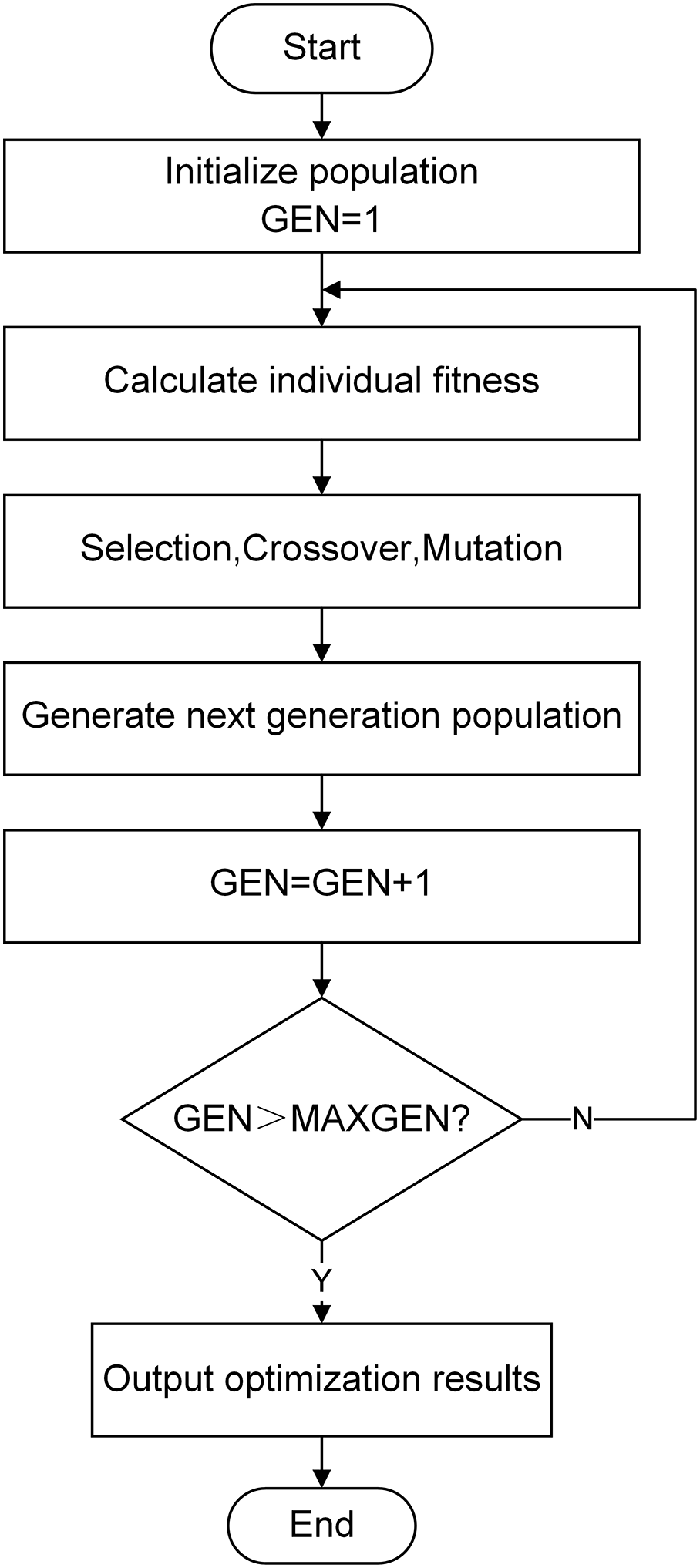
Figure 4: The overall flow chart of GA optimization
After optimizing the five networks’ attribute weights
In the mobile communication environment, the waves encounter obstacles such as undulating hills, buildings, and vegetation in the propagation path, which form the shadow area of the waves, resulting in the slow fluctuation of the median value of the signal field strength with the change of position, resulting in the fading of the signal strength. This phenomenon is called the shadowing effect, and the resulting fading is also called shadow fading. Shadow fading is usually represented by a shadow fading factor (dB) that follows a normal distribution. As shown in Eq. (18).
where
The Probability Density Function (PDF) of shadow fading is defined as the probability that a certain shadow fading value (dB) occurs. The formula is as follows:
The path loss
where
When the terminal device is moving, the amplitude of the signal has a rapid and random variation within a few wavelengths, which is called fast fading. In this paper, the Jakes model is used to simulate the multipath decline channel, and the Doppler effect caused by a strong Line-of-Sight (LoS) propagation path signal is combined. The arrival direction Angle of the multipath signal is different. Suppose there are
After that, the maximum Doppler shift
where
The multipath signal component and the LoS propagation signal component constitute the in-phase component
The quadrature component
The fast-fading signal response amplitude
Based on the above, the fast-fading signal
Ultimately, the RSS value
where
The RSS is calculated by the above formula and will be used for the calculation in the subsequent simulation.
The channel capacity
where
When the user is connected to a BS, the signals of other BSs belong to interference signals. If there are
where
The path loss
Noise in wireless communication is usually thermal noise. The calculation formula is as follows.
where
The packet loss Rate can be calculated by the Bit Error Rate (BER). Considering 16 Quadrature Amplitude Modulation (16QAM), the BER
where
In summary, the BER under AWGN channel is obtained. However, in the fading channel, it is necessary to combine the BER under AWGN with the PDF of the fading parameters. The BER
where
Finally, the packet loss rate
In order to verify the performance of the proposed algorithm, the MATLAB R2022b software is utilized as the simulation platform to establish the simulation model. In the simulation, the Symmetric Alpha-Stable Distribution (SαS) distribution (characteristic index
Firstly, the network handoff times and total system throughput of the proposed algorithm AHP + GA are compared with the algorithm RSS-based and DT-VHO in the same scenario. After that, the network handoff delay of the proposed algorithm AHP + GA is compared with the algorithms RSS-based and ANN-VHO in the same scenario. The performance of these algorithms is compared in terms of network handoff times, system total throughput, handoff delay, and so on. The settings of the network’s attribute parameters in the simulation are shown in Table 1. The RSS value

The five networks attributes are compared two by two, and a 9-level scale is used to give a score for each networks attribute value. The initial weight matrix
According to the initial weights matrix with Eqs. (7) and (8),
After obtaining the initial weights, they initial weights are optimized using GA. Set the initial crossover rate
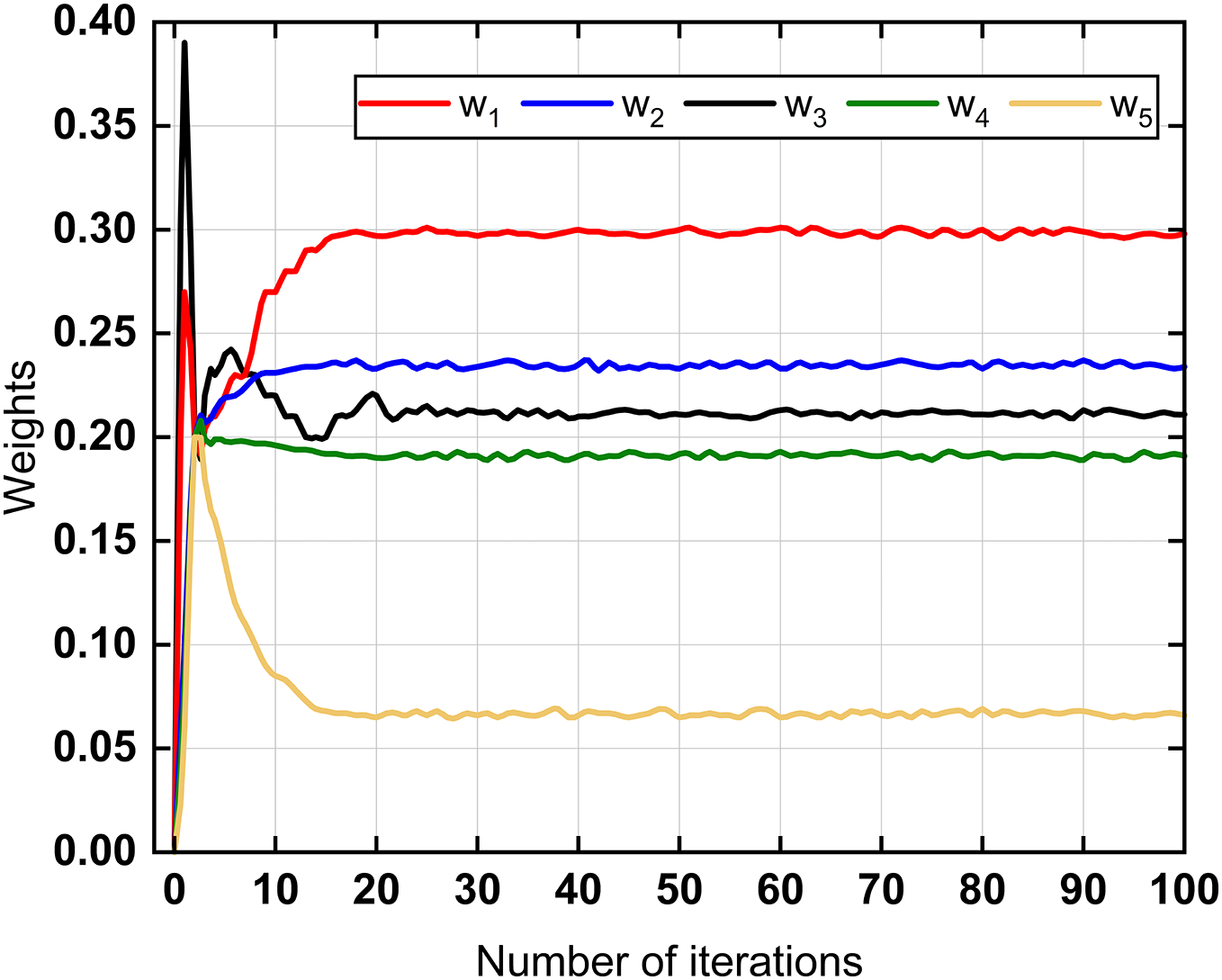
Figure 5: Curve of convergence
After the above steps, the best weights after GA optimization are obtained. After that, the effectiveness and performance of the algorithm are verified.
The effectiveness of the algorithm proposed in this paper is first verified. Create a simulation scenario as shown in Fig. 6. The simulation scenario is a rectangular area of 10 km × 6 km, including a UAV equipped with a 5G module and a self-organizing mesh network module, a 5G BS, and a mesh signaling node. The 5G BS coordinates are (4, 3), and the mesh node coordinates are (7.4, 3). The initial position coordinates of the UAV are (0.6, 3.4), and it is moving at a speed of 36 km/h to the right. The parameters of each network are shown in Table 1. The changes of each network utility function and the access network in this process were recorded. The relationship between UAV access to the networks and the value of the network’s utility function is shown in Fig. 7. The results show that the UAV can choose to access the networks with a larger utility function, which proves the effectiveness of the proposed algorithm.
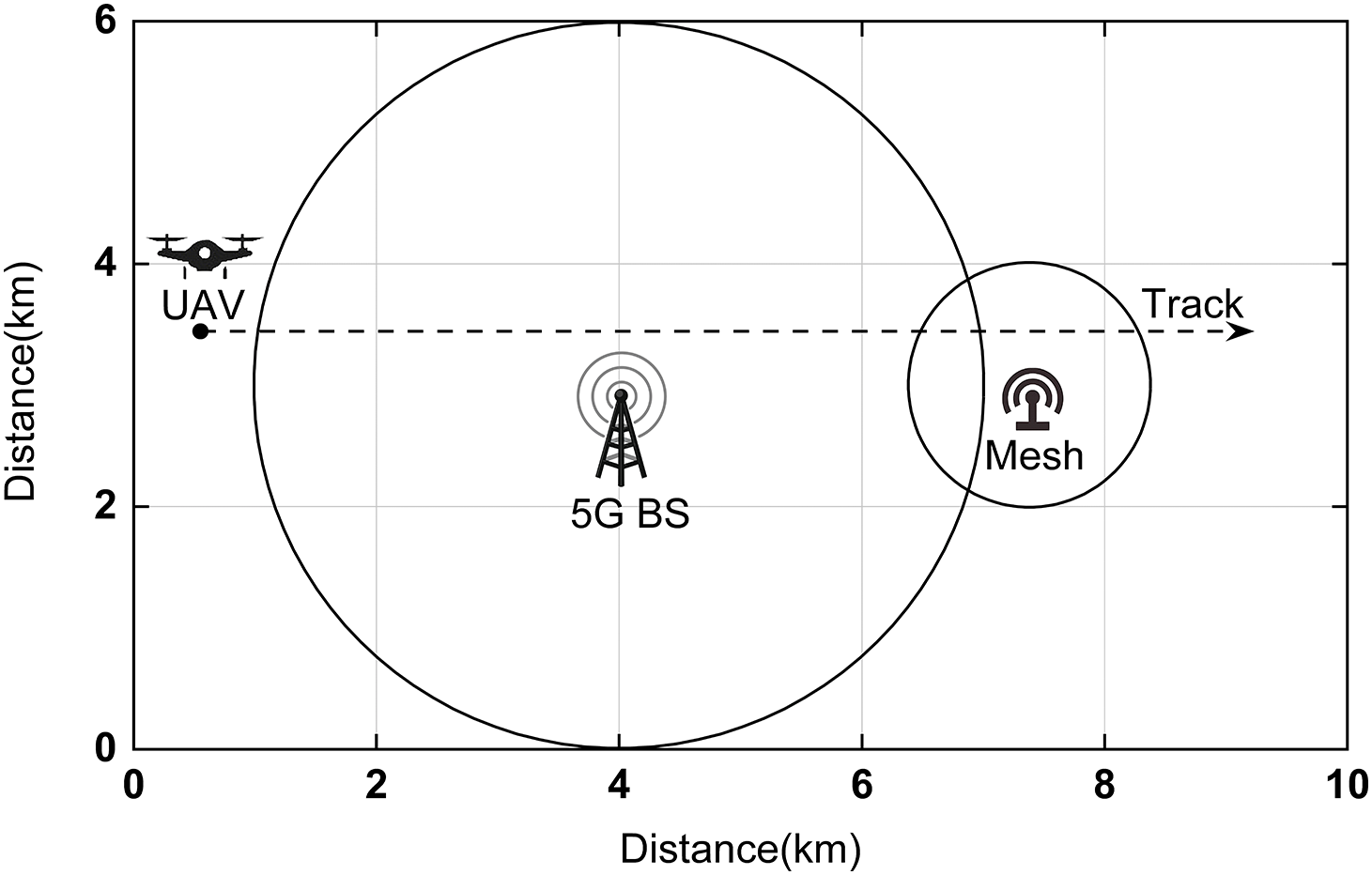
Figure 6: Effectiveness simulation scenario
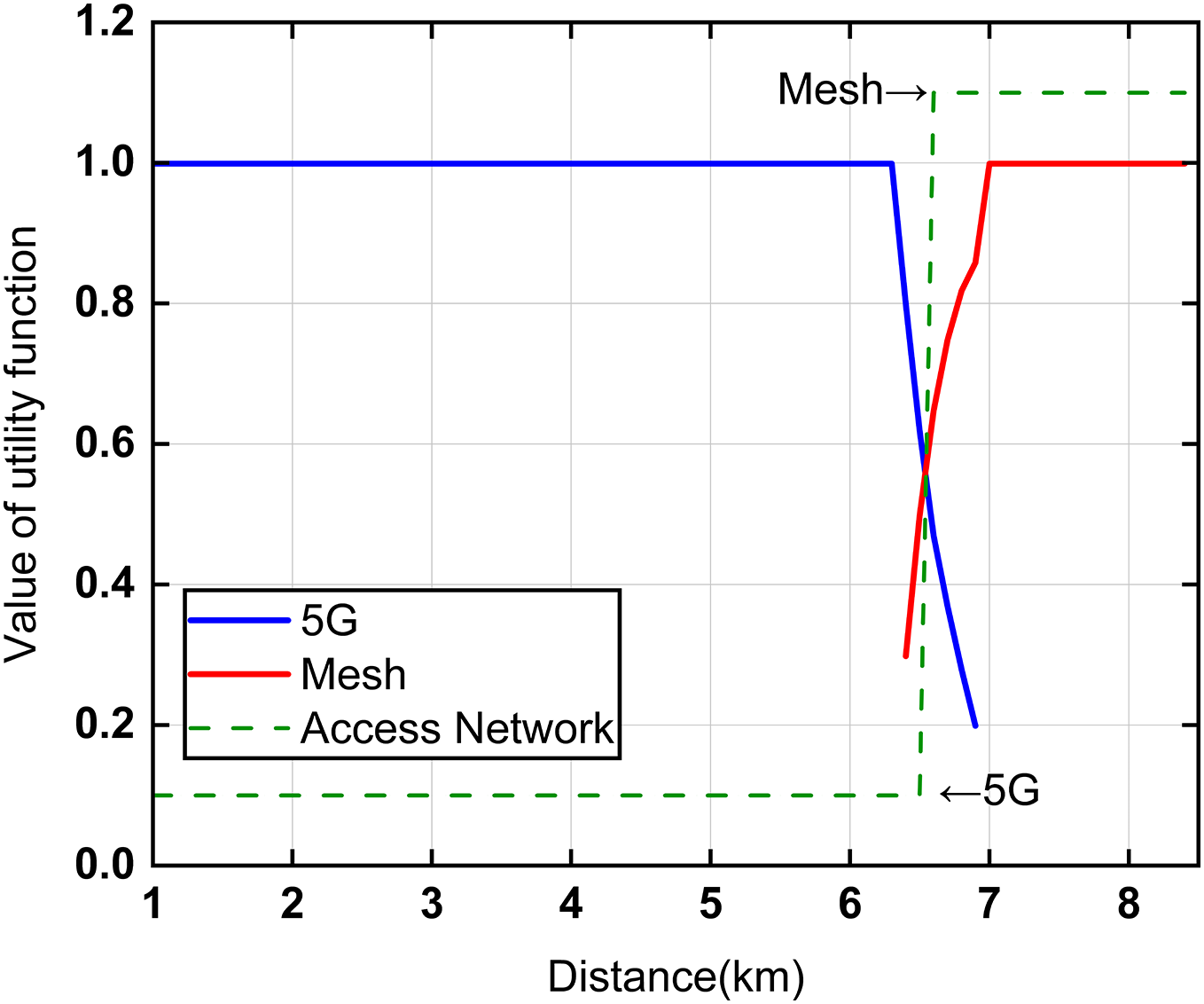
Figure 7: Relationship between the access networks and the value of the network’s utility function
In order to verify the improvement of the ping-pong effect of the proposed algorithm, simulation experiments are carried out on the UAV networks’ handoff times of the proposed AHP + GA, RSS-based, and DT-VHO in the same scene. The simulation scenario is created as shown in Fig. 8. The scenario is a 4 km × 4 km × 4 km three-dimensional space containing three UAVs equipped with 5G modules and self-organizing mesh network modules, navigating at a speed of 36 km/h at a set waypoint. A 5G BS is set at coordinates (4, 0, 0). Other network parameters are shown in Table 1.
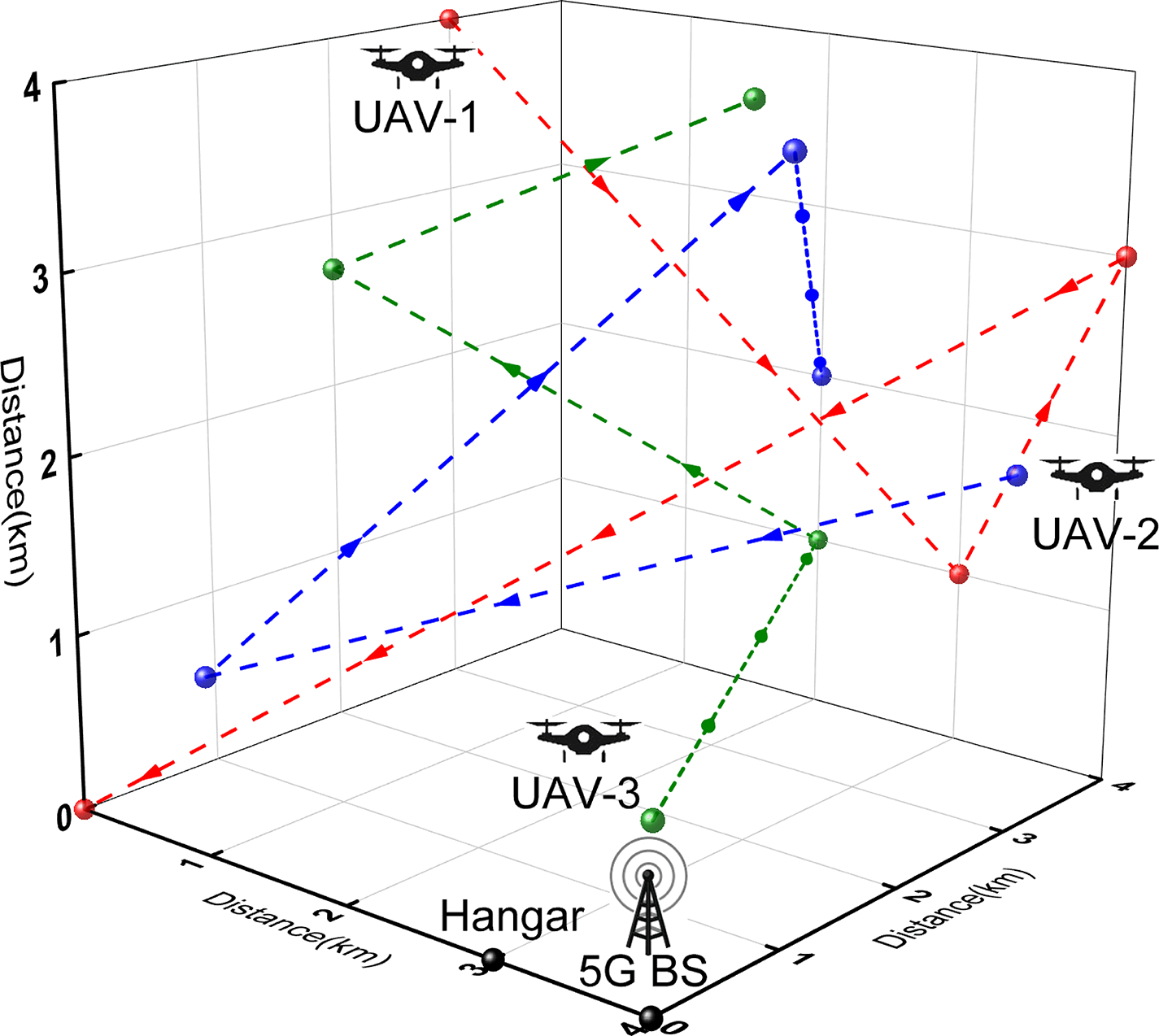
Figure 8: 3D simulation scenario
Record the access networks handoff status of UAV 1, conduct 100 handoff experiments, and calculate the average value of handoff times for every ten times as a group. After that, a certain number of UAVs are added to the scene and fly according to their established waypoints. Ten experiments were conducted under each quantity, and the average number of single-experiment handoffs of UAV 1 was recorded. The experimental results are shown in Figs. 9 and 10. The results show that the number of handoffs is 5.91 ± 0.170 for algorithm AHP + GA, 8 ± 0.178 for algorithm DT-VHO, and 11.66 ± 0.398 for algorithm RSS-based. The results show that when there are three UAVs, the number of handoff times of AHP + GA is reduced by 26.13% compared with DT-VHO and 49.31% compared with RSS-based. After more UAVs are connected, AHP + GA still maintains the lowest number of handoffs. This indicates that the proposed algorithm has relatively lower network handoff times and significantly improves the ping-pong effect.
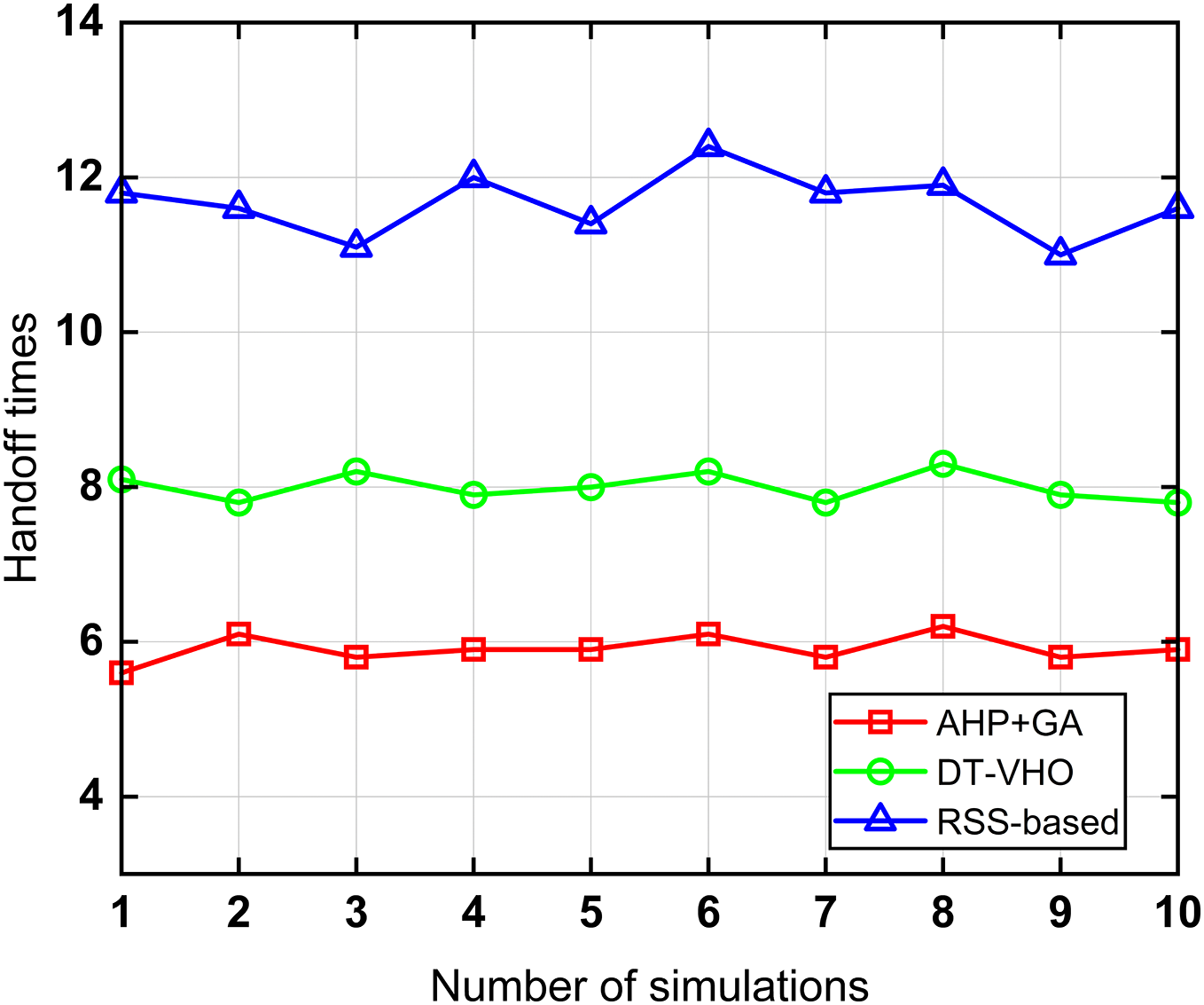
Figure 9: Comparison of handoff times
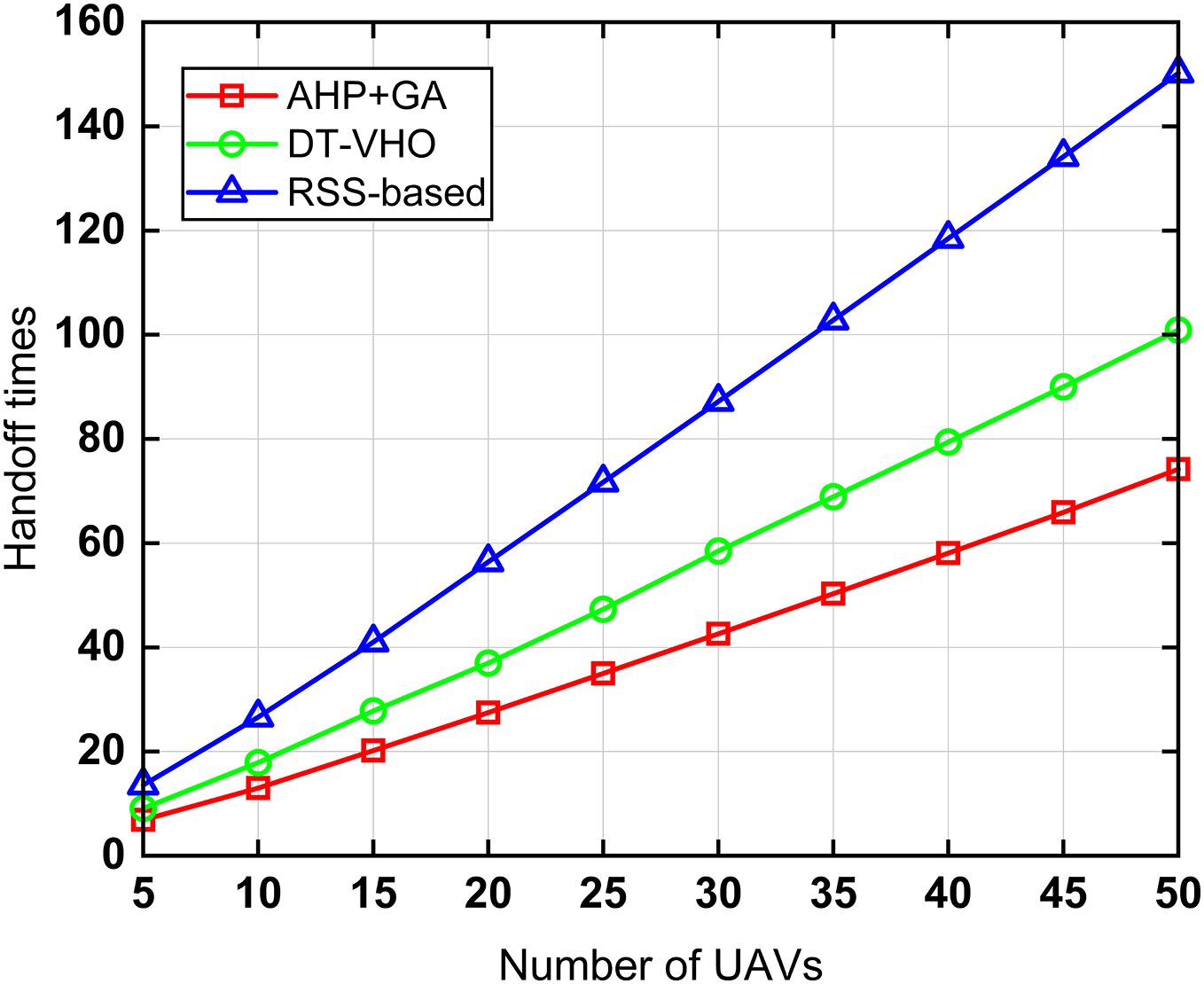
Figure 10: Handoff times under different quantities
The ping-pong switching probability during the recorded switching process is shown in Fig. 11. The ping-pong switching probability of algorithm AHP + GA is reduced by 34.56% compared with DT-VHO, and is reduced by 60.16% compared with the algorithm RSS-based. AHP + GA algorithm effectively reduces the probability of the ping-pong effect.
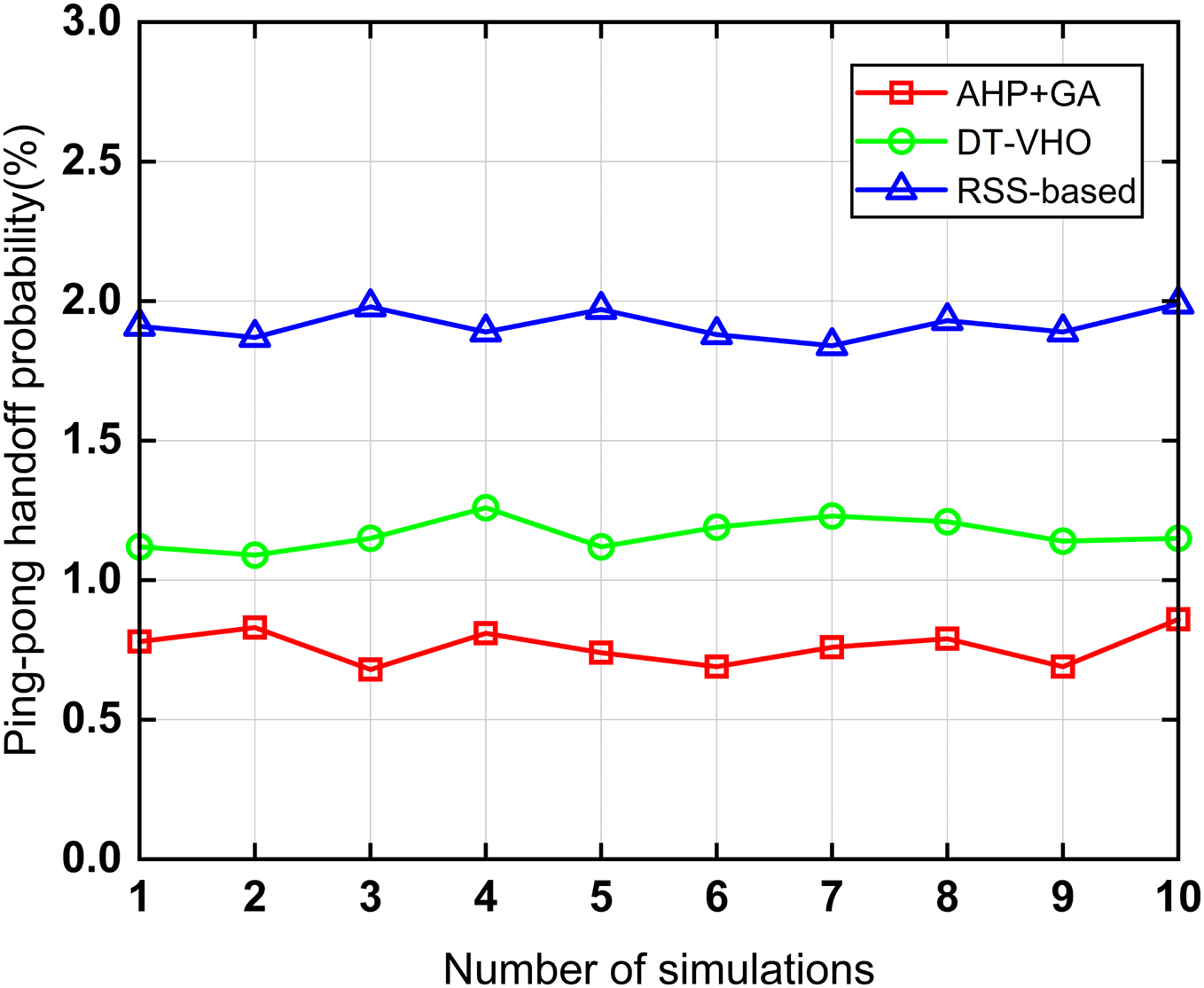
Figure 11: Comparison of ping-pong handoff probabilities
Throughput reflects the amount of data transmitted by the system per unit of time. The higher the throughput, the higher the transmission efficiency of the system, which is an important performance indicator of the networks. A certain number of UAVs are added to the simulation scenario shown in Fig. 8 to test the total network throughput of the three handoff algorithms with different numbers of UAVs. When the number of accessed UAVs is less than 35, the throughput increases with the increase of UAVs, and when the number of accessed UAVs is more than 35, the throughput increases slowly and gradually tends to equilibrium, and the system tends to saturation. As demonstrated in Fig. 12, the total throughput of AHP + GA is 19.99% higher than that of DT-VHO and 64.62% higher than that of RSS-based.
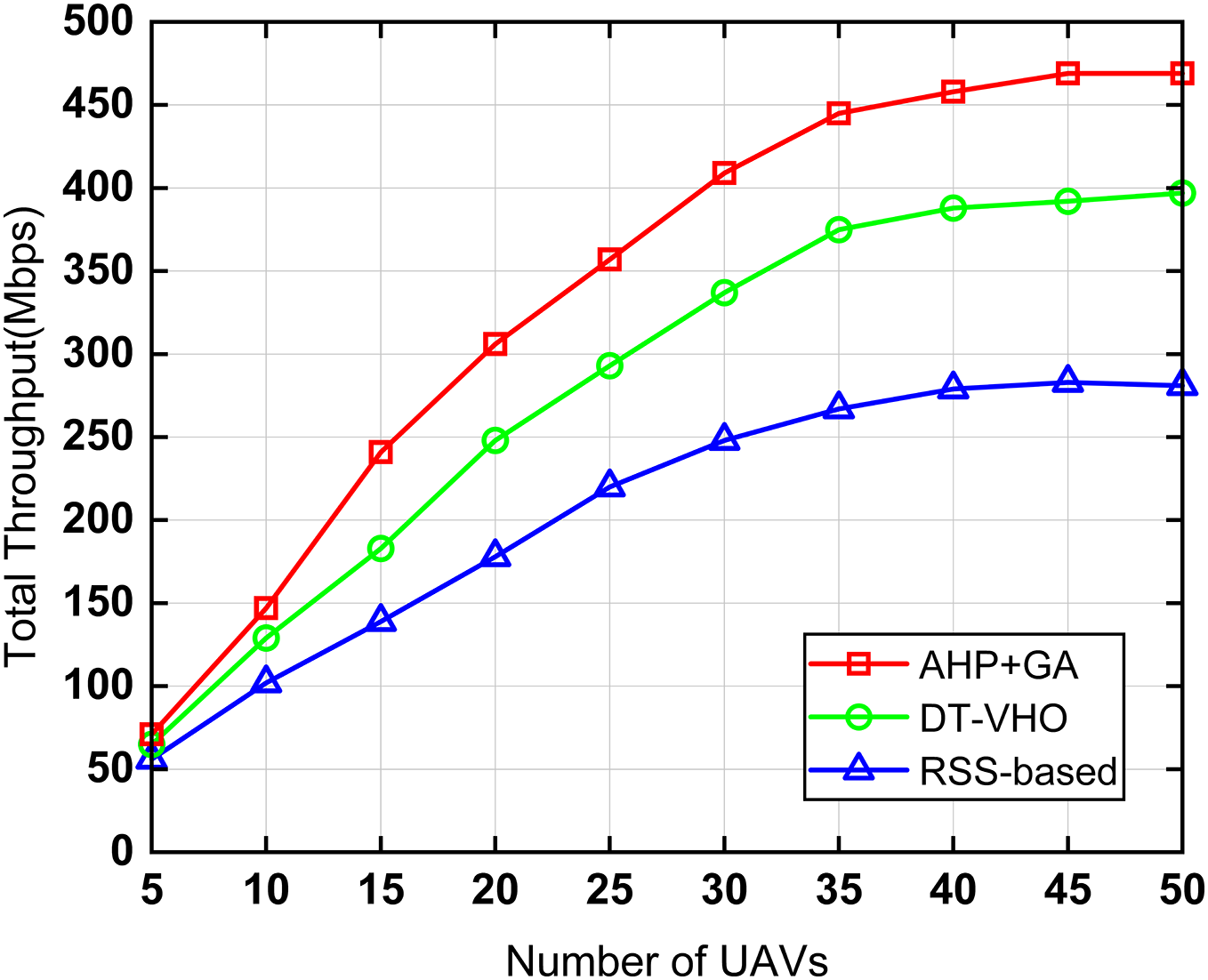
Figure 12: Comparison of total throughput
The handoff delay is defined as the total time spent from the initiation of handoff execution to the completion of the handoff process. Handoff delay is an important metric for a high-speed moving UAV-H cluster. Compare the handoff delay of AHP + GA algorithm proposed in this paper with RSS-based and ANN-VHO. Utilizing the simulation scenario depicted in Fig. 8, the handoff delay of UAV 1 is documented, and 100 experiments are conducted. The mean value of the handoff delay is then calculated on an aggregate basis every ten times. The experimental results are shown in Fig. 13. The handoff delay of the RSS-based algorithm is 97.2 ms, the AHP + GA algorithm is 127 ms, and the ANN-VHO algorithm is 241.9 ms. Compared with ANN-VHO, the handoff delay is reduced by 47.5%, and while the performance is significantly higher than RSS-based, the handoff delay is only about 30 ms higher on average.
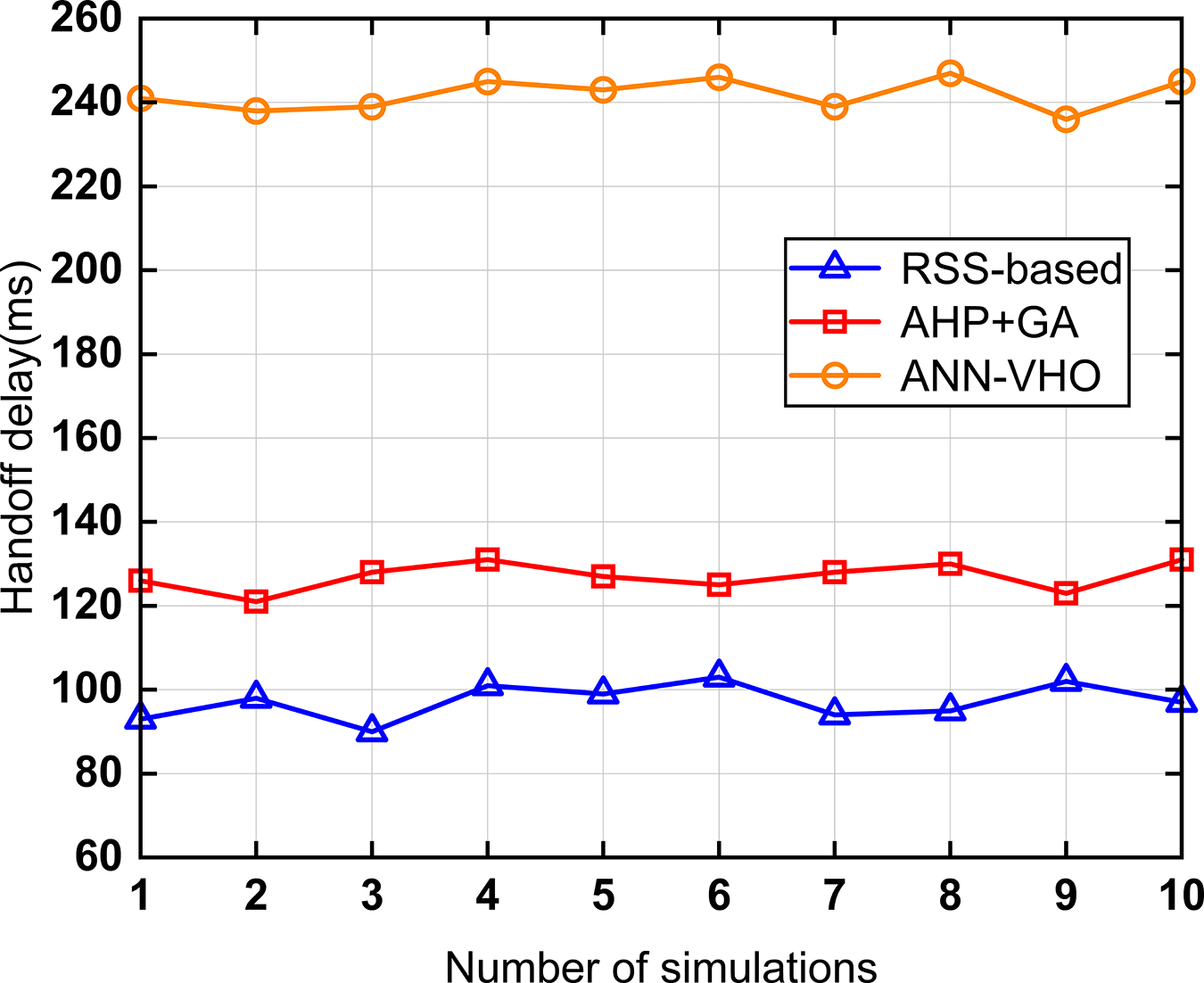
Figure 13: Comparison of handoff delay
In the process of multiple handoffs, the fluctuation degree of handoff delay is defined as handoff delay jitter, which is a key indicator to measure the stability of the algorithm in dynamic scenarios. The CDF analysis of handoff delay jitter provides critical insights into the stability and reliability of VHO algorithms. As illustrated in Fig. 14, the CDF curves compare the delay distributions of three representative algorithms: Algorithm RSS-based, with 95% of delays concentrated below 115.8 ms, and Algorithm AHP + GA, which is 135.9 ms, reflecting good consistency. Algorithm ANN-VHO exhibits a long-tailed distribution, with 95% of delays concentrated below 265.3 ms but a pronounced tail extending to 355.6 ms, indicating occasional extreme jitter events.
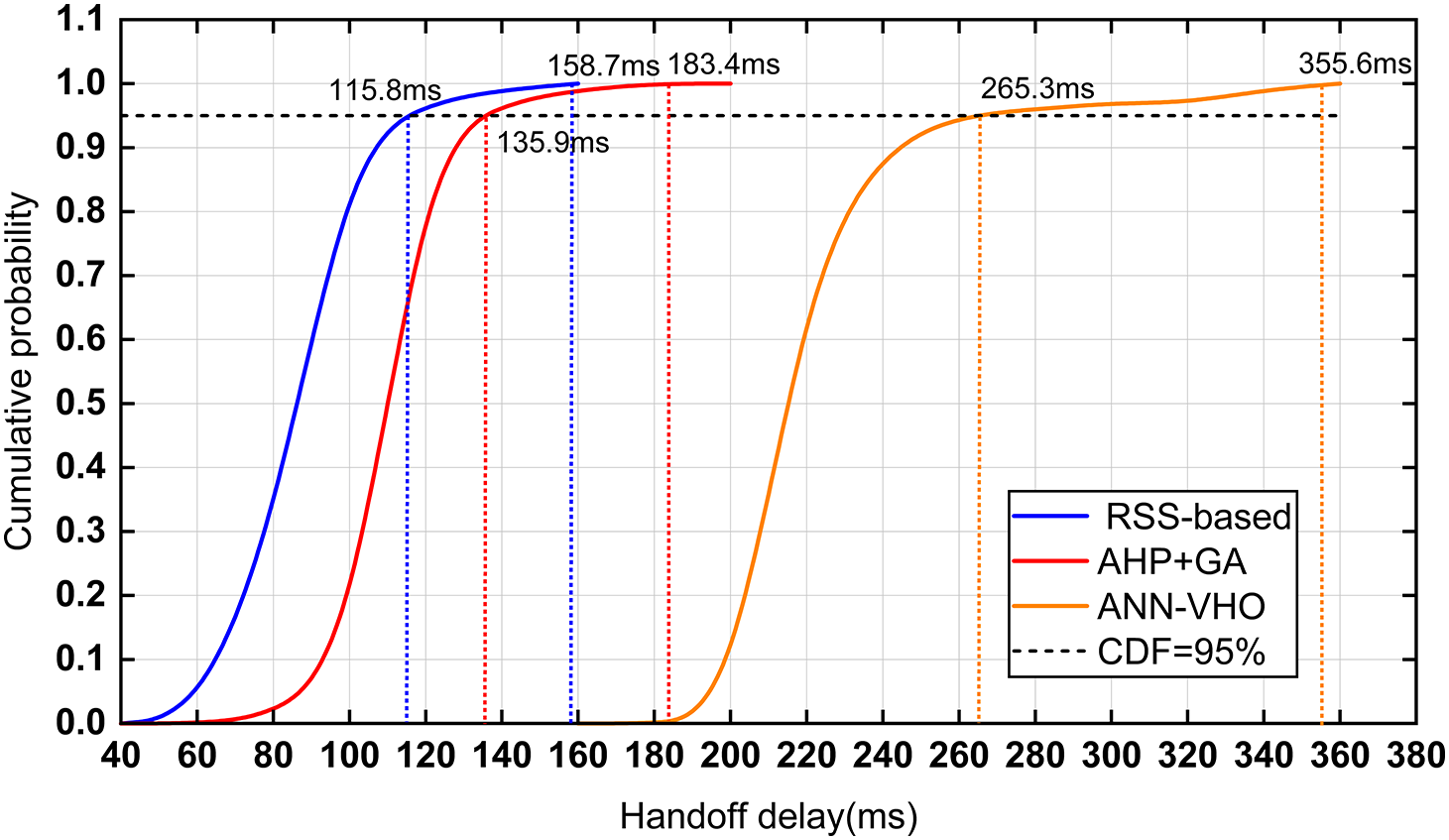
Figure 14: CDF curve of delay jitter
4.2 Practical Platform Experiment
The algorithm AHP + GA proposed in this paper demonstrates excellent performance in simulation experiments. However, simulation experiments are not enough to truly show the performance of the algorithm. Therefore, this section utilizes the Raspberry Pi as the hardware platform to conduct experiments on the VHO algorithm. The platform consists of two Raspberry Pi, Raspberry Pi 1 as the UAV terminal and Raspberry Pi 2 as the mesh node. As shown in Fig. 15. UAV equipment can carry a Raspberry Pi platform for data calculation processing, algorithm operation, etc. There is no difference between the computing performance and network capabilities of Raspberry PI and the actual flight. Therefore, the hardware experiment platform can reflect the performance of real UAV equipment [5].
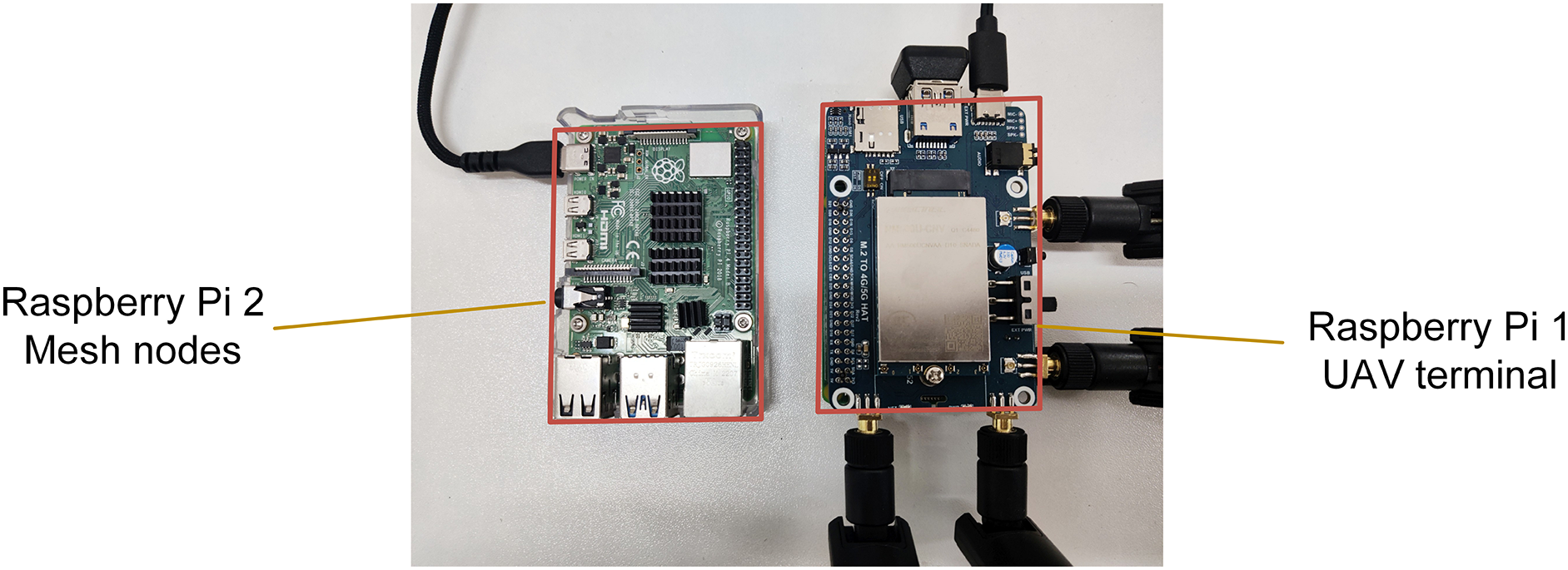
Figure 15: The hardware platform
The Raspberry Pi 1 is equipped with a 5G module, model Quectel RM500U. The 5G module drives the Raspberry Pi to connect to the 5G network via the USB cable. The self-organizing mesh network uses the Better Approach To Mobile Ad-Hoc Networking-Advanced (BATMAN-ADV) protocol run by the Broadcom BCM43455 chipset built into the Raspberry Pi 4B. As shown in Fig. 16.
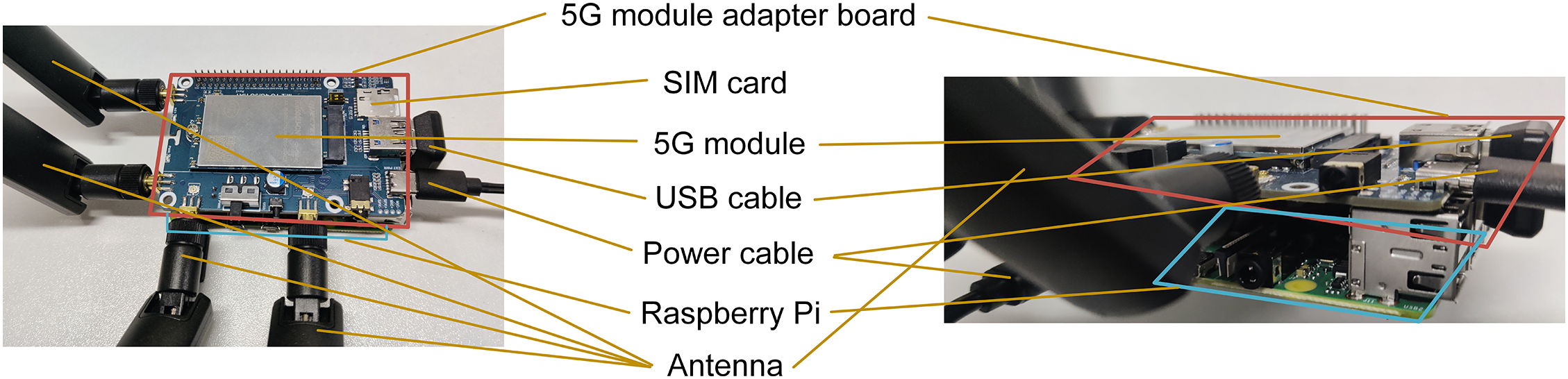
Figure 16: Raspberry Pi 1 and 5G module
The experimental site is an indoor-outdoor scene in a suburban area. The performance parameters of the received 5G network are adjusted by changing the indoor and outdoor scenarios and manually adjusting the number of onboard antennas. Reference Signal Receiving Power (RSRP) is defined as the average value of the received power of the cell reference signal, which is more practical. And the 5G module can directly detect the RSRP of the current network, so RSRP is used instead of RSS in the actual experiment. After the actual test, the RSRP and delay of 5G network are significantly different in the case of indoor and outdoor, and with varying numbers of antennas. As shown in Table 2.

The experimental scene is set as an outdoor and indoor scene, with a total of 40 m of outdoor scene and 60 m of indoor scene. The Raspberry Pi 2 (Mesh node) was set up indoors at a location 30 m from the indoor-outdoor junction. The coordinates are (70, 20).
The algorithm’s effectiveness is first verified. Raspberry Pi 1 (UAV terminal) moves from the outdoor 40 m away from the junction at the coordinate (0, 20) to the indoor direction at the speed of 2 m/s and removes three antennas of the 5G module at the position 10 m away from the junction at the coordinate (30, 20), only keeps one transmitting and receiving antenna. As shown in Fig. 17.
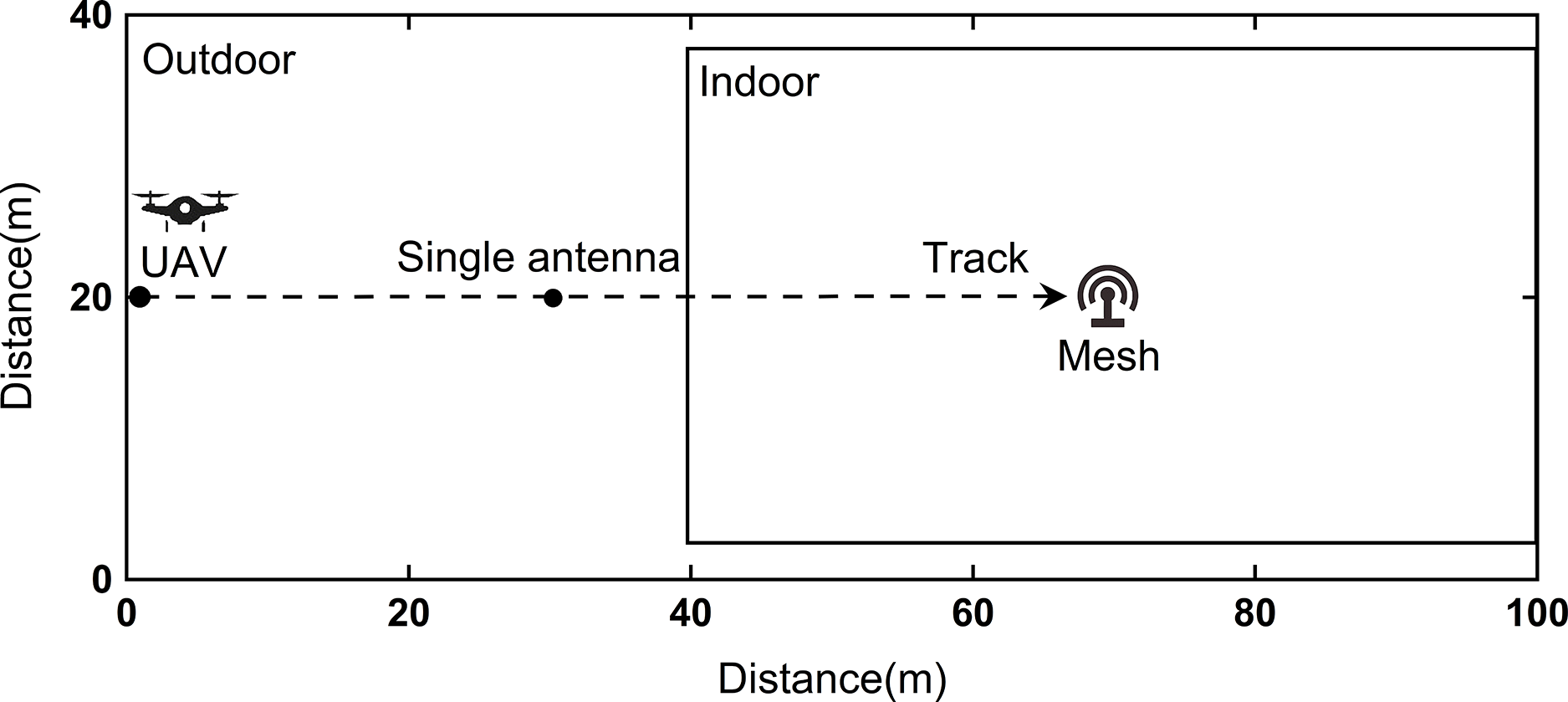
Figure 17: Schematic of the effectiveness experiment scenario
The UAV undergoes a network switchover from the 5G network to the mesh network at the indoor position 2 m away from the junction, the coordinates are (42, 20). The network status before and after the handoff is recorded as shown in Tables 3 and 4. According to the data in the table, the utility function


Changing experimental scenarios to test algorithm performance. The mesh node is set outdoors at (30, 15), and the UAV terminal moves from the starting point (0, 20) 45 degrees southeast to (20, 0), then 45 degrees northeast to (40, 20), then 45 degrees northwest to (20, 40), then 45 degrees southwest to the starting point. Finally, it moves due east to the indoor area and continues to move. As shown in Fig. 18.
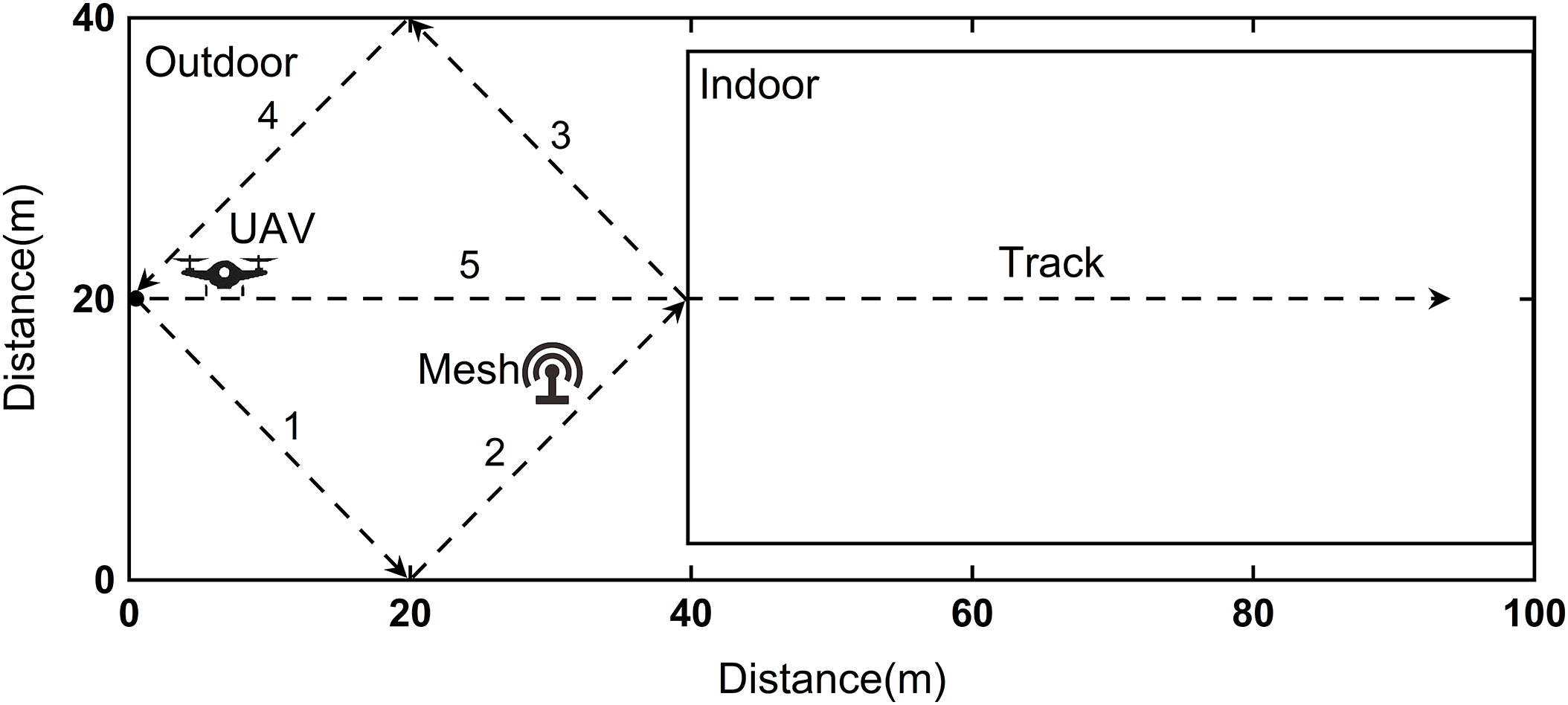
Figure 18: Schematic of the performance experiment scenario
The network handoff status during a single movement is recorded as shown in Table 5.

The algorithm AHP + GA was compared with the algorithm RSS-based in terms of handoff times and system throughput. Twenty experiments were performed and the average was calculated in groups of four. The experimental results are shown in Figs. 19 and 20. The handoff times are 4.2 ± 0.245 for algorithm AHP + GA, 4.9 ± 0.123 for algorithm DT-VHO and 8.1 ± 0.374 for algorithm RSS-based. The throughput is 119.88 ± 1.324 Mbps for algorithm AHP + GA, 105.72 ± 0.886 Mbps for algorithm DT-VHO and 90.28 ± 2.003 Mbps for algorithm RSS-based. The algorithm AHP + GA reduces the handoff times by 47.5% and increases the throughput by 32.79% compared to the algorithm RSS-based. Compared with the algorithm DT-VHO, the handoff times are reduced by 14.29%, and the throughput is increased by 13.36%. The results show that the proposed algorithm AHP + GA has significant advantages over the traditional algorithm RSS-based, which significantly reduces the ping-pong effect and improves the total throughput of the system.
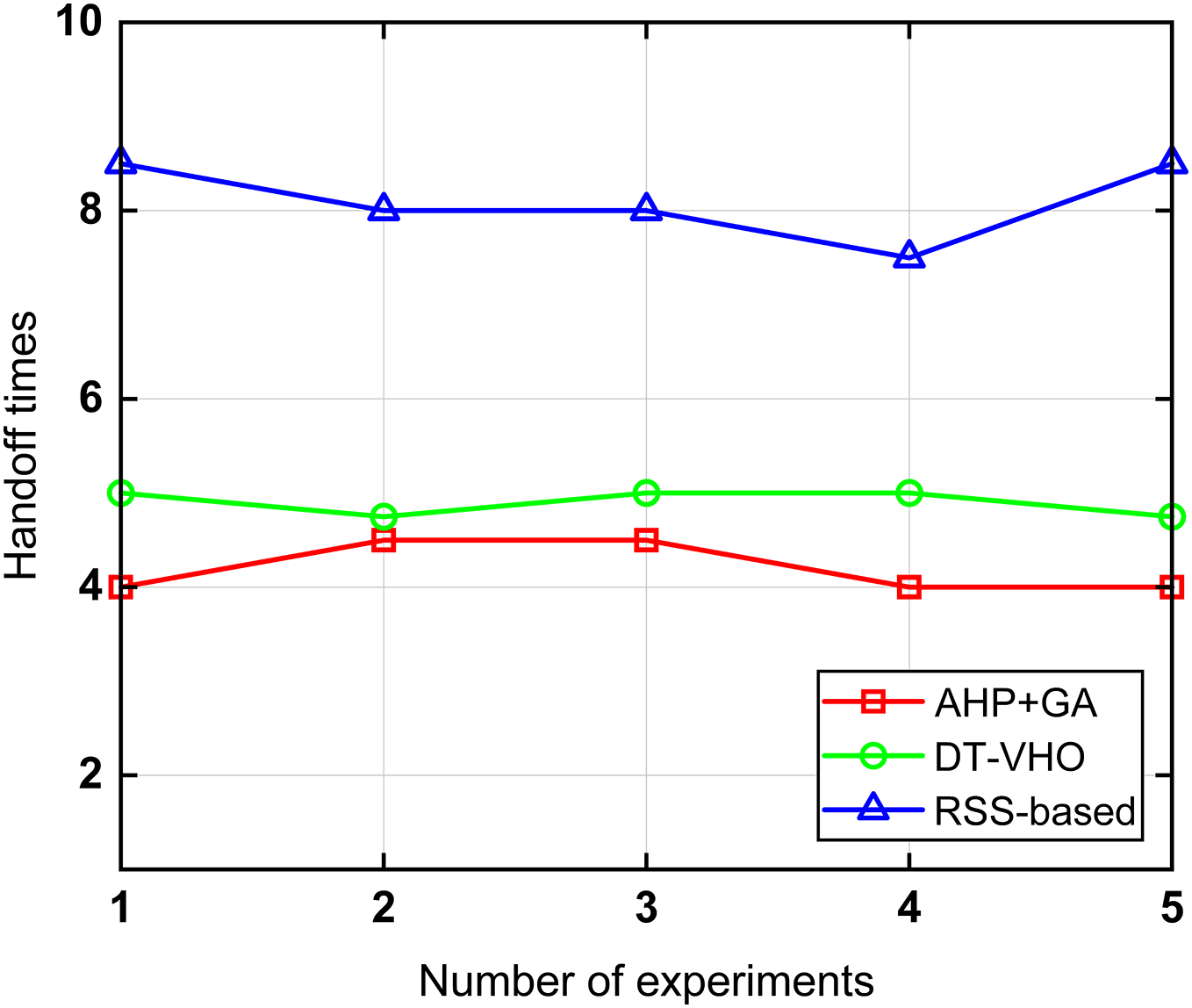
Figure 19: Comparison of handoff times
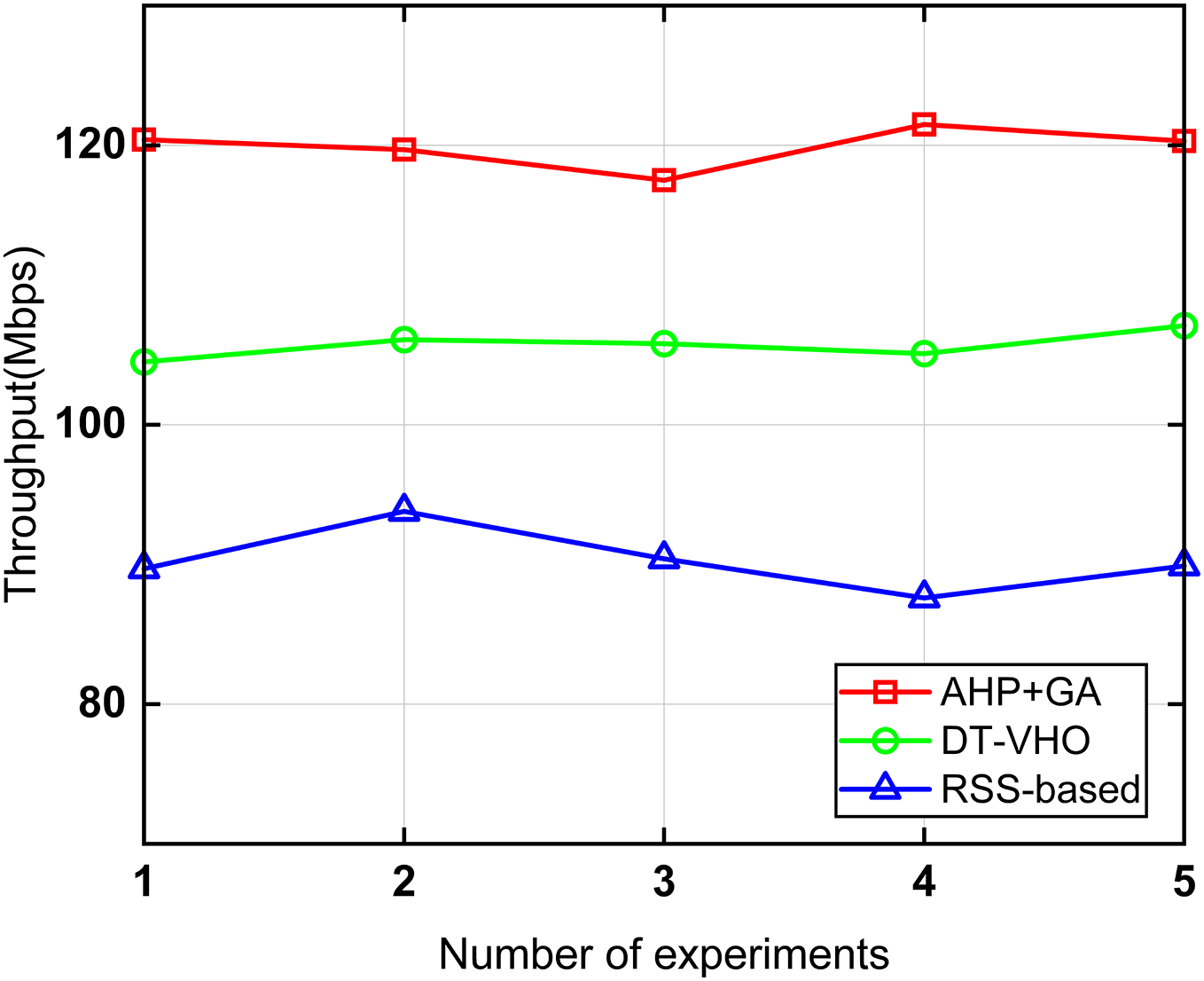
Figure 20: Comparison of throughput
The code execution time for each switch is recorded with the clock_gettime() function. This data is taken as the handoff delay and compared. ANN-VHO algorithm has absolute objectivity, and its handoff delay must be significantly higher than other algorithms, so it is not discussed in this part. The results are shown in Fig. 21. The handoff delay of the algorithm DT-VHO is 168 ± 1.673 ms, the algorithm AHP + GA is 165.4 ± 2.727 ms, 21.8% higher than that of the algorithm RSS-based (135.8 ± 2.227 ms), which is lower than the performance improvement of the algorithm AHP + GA. The handoff delay growth is lower, but the performance improvement is higher, which indicates that the algorithm AHP + GA is superior.
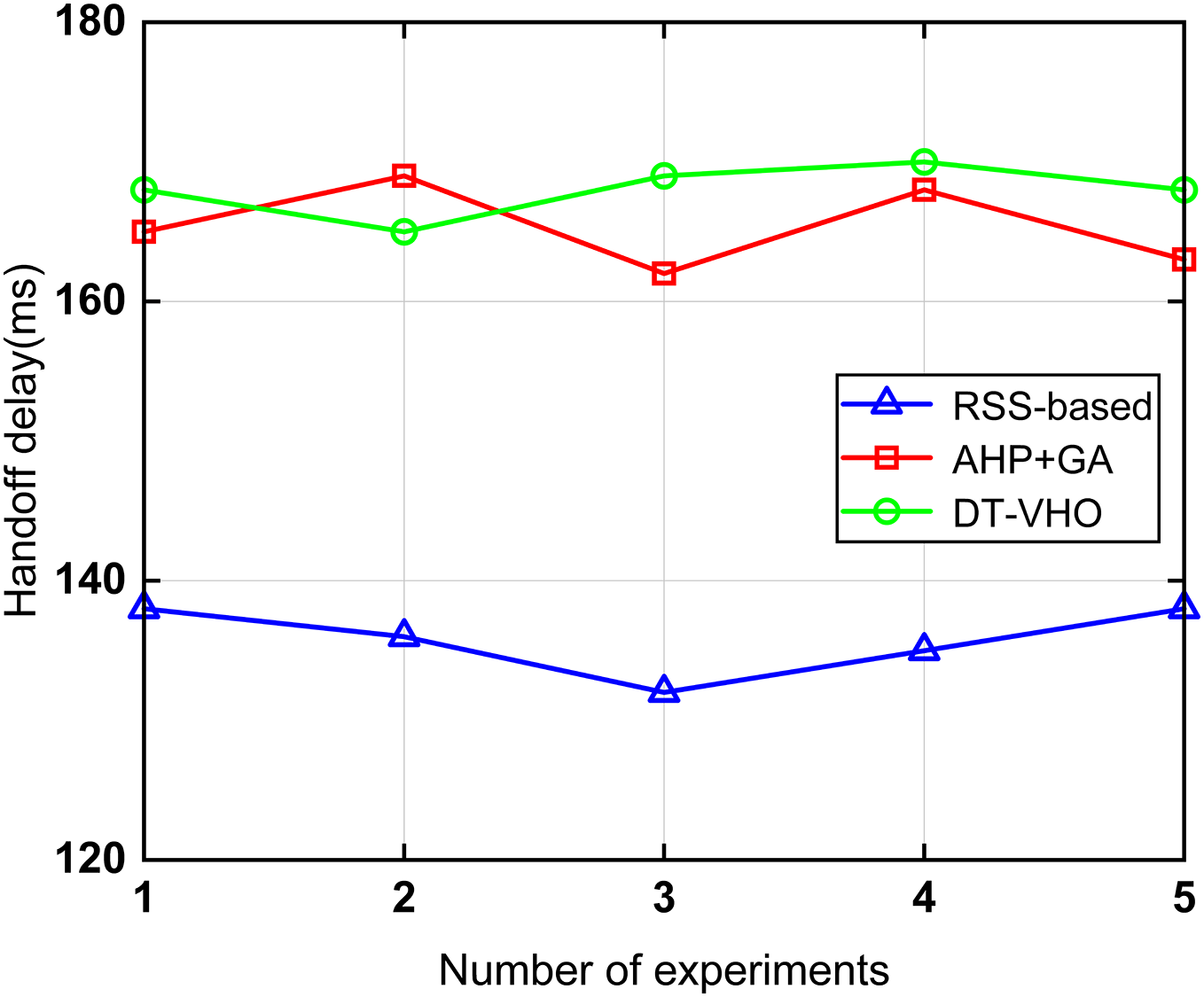
Figure 21: Comparison of handoff delay
In this study, a heterogeneous network architecture combining 5G cellular networks and self-organizing mesh networks for UAV-H clusters in environments where the signal coverage of 5G networks cannot be well guaranteed is proposed, and the VHO algorithm applicable to this network architecture is investigated. The algorithm is based on MADM theory and AHP + GA optimization as the main body, so that UAVs always choose the best networks to access the current network conditions. The experimental results show that the proposed heterogeneous network architecture can be well suited for agricultural field environments with poor 5G signal coverage. The VHO algorithm with AHP + GA optimization has a better performance compared to the traditional algorithm, RSS-based, and DT-VHO, can effectively reduce the ping-pong effect, improve the overall network quality, and finally get a better QoS. Compared with the ANN-VHO algorithm, with highly complex calculations, the handoff delay is significantly reduced, which is more suitable for the scene of high-speed movement of the UAV-H cluster. Finally, experiments are carried out on the actual hardware platform, and the effectiveness and performance of the AHP + GA algorithm are verified again.
In a long period of time in the future, the MADM class VHO algorithm will still be the mainstream choice of VHO algorithms for UAV-H cluster heterogeneous networks. This paper provides a new selection of MADM class algorithms, which have superior performance and enable the UAV-H clusters to obtain better network connectivity in heterogeneous networks.
Although the proposed method shows good performance, the actual network environment is very complex, and noise interference, signal attenuation, and the motion state of the UAV-H cluster will all affect the performance of the VHO algorithm. The method based on MADM does not fully consider the real-time dynamic characteristics of the networks in the cluster networks.
With the development of heterogeneous networks, more terminal devices access heterogeneous networks, and the amount of data processing will expand rapidly. The current VHO algorithm based on neural networks is good at processing a large amount of data, but it is challenging to apply to the situation of high motion and low computing resources of the UAV-H cluster. In future research, the focus should be on how to make the MADM method fully take into account the real-time dynamic characteristics of the networks, and how to reduce the computational complexity of the neural networks-based VHO method so that it is more suitable for highly dynamic UAV-H cluster networking.
Acknowledgement: The authors would like to thank all supporting institutions for enabling this research. Any opinions, findings, and conclusions expressed in this article are those of the authors and do not necessarily reflect the views of the affiliated organizations.
Funding Statement: This work is supported by the Key R&D Plan of Shandong Province (Major Science and Technology Innovation Project) No. 2023CXGC010701; 2024 City-University Integrated Development Strategic Engineering Project No. JNSX2024066.
Author Contributions: Conceptualization, Siliang Chen, Dongri Shan and Yansheng Niu; methodology, Siliang Chen and Yansheng Niu; software, Siliang Chen and Yansheng Niu; validation, Dongri Shan and Siliang Chen; formal analysis, Dongri Shan and Yansheng Niu; investigation, Siliang Chen; resources, Dongri Shan; data curation, Dongri Shan; writing—original draft preparation, Siliang Chen; writing—review and editing, Yansheng Niu; visualization, Siliang Chen; supervision, Dongri Shan and Yansheng Niu; project administration, Dongri Shan; funding acquisition, Dongri Shan. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the Corresponding Author, Dongri Shan, upon reasonable request.
Ethics Approval: This research did not involve human participants or animal testing. Ethical review and approval were therefore waived.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Radoglou-Grammatikis P, Sarigiannidis P, Lagkas T, Moscholios I. A compilation of UAV applications for precision agriculture. Comput Netw. 2020;172:107148. doi:10.1016/j.comnet.2020.107148. [Google Scholar] [CrossRef]
2. Dangi R, Lalwani P, Choudhary G, You I, Pau G. Study and investigation on 5G technology: a systematic review. Sensors. 2021;22(1):26. doi:10.3390/s22010026. [Google Scholar] [PubMed] [CrossRef]
3. Geraci G, Garcia-Rodriguez A, Azari MM, Lozano A, Mezzavilla M, Chatzinotas S, et al. What will the future of UAV cellular communications be? A flight from 5G to 6G. IEEE Commun Surv Tutor. 2022;24(3):1304–35. doi:10.1109/COMST.2022.3171135. [Google Scholar] [CrossRef]
4. Al-Absi MA, Al-Absi AA, Sain M, Lee H. Moving Ad Hoc Networks—a comparative study. Sustainability. 2021;13(11):6187. doi:10.3390/su13116187. [Google Scholar] [CrossRef]
5. Bakirci M. A novel swarm unmanned aerial vehicle system: incorporating autonomous flight, real-time object detection, and coordinated intelligence for enhanced performance. Trait Signal. 2023;40(5):2063–78. doi:10.18280/ts.400524. [Google Scholar] [CrossRef]
6. Nawaz H, Ali HM, Laghari AA. UAV communication networks issues: a review. Arch Comput Method Eng. 2021;28(3):1349–69. doi:10.1007/s11831-020-09418-0. [Google Scholar] [CrossRef]
7. Xu Y, Gui G, Gacanin H, Adachi F. A survey on resource allocation for 5G heterogeneous networks: current research, future trends, and challenges. IEEE Commun Surv Tutor. 2021;23(2):668–95. doi:10.1109/COMST.2021.3059896. [Google Scholar] [CrossRef]
8. Bhosale S, Daruwala R. Multi-criteria vertical handoff decision algorithm using hierarchy modeling and additive weighting in an integrated WLAN/WiMAX/UMTS environment-a case study. KSII Trans Internet Inf Syst. 2014;8(1):35–57. doi:10.3837/tiis.2014.01.003. [Google Scholar] [CrossRef]
9. Gustafsson E, Jonsson A. Always best connected. IEEE Wirel Commun. 2003;10(1):49–55. doi:10.1109/MWC.2003.1182111. [Google Scholar] [CrossRef]
10. Ahmed A, Boulahia LM, Gaiti D. Enabling vertical handover decisions in heterogeneous wireless networks: a state-of-the-art and a classification. IEEE Commun Surv Tutor. 2013;16(2):776–811. doi:10.1109/SURV.2013.082713.00141. [Google Scholar] [CrossRef]
11. Chiussi FM, Khotimsky DA, Krishnan S. Mobility management in third-generation all-IP networks. IEEE Commun Mag. 2002;40(9):124–35. doi:10.1109/MCOM.2002.1031839. [Google Scholar] [CrossRef]
12. Xie X, Rong B, Zhang T, Lei W. Improving physical layer multicast by cooperative communications in heterogeneous networks. IEEE Wirel Commun. 2011;18(3):58–63. doi:10.1109/MWC.2011.5876501. [Google Scholar] [CrossRef]
13. Vulic N, de Groot SMH, Niemegeers IG. Vertical handovers among different wireless technologies in a UMTS radio access-based integrated architecture. Comput Netw. 2011;55(7):1533–48. doi:10.1016/j.comnet.2010.12.028. [Google Scholar] [CrossRef]
14. Shao R, Li X. Analysis of weighting and network selection methods for vertical handoff in wireless body area network. Wirel Pers Commun. 2024;137(3):1861–901. doi:10.1007/s11277-024-11469-6. [Google Scholar] [CrossRef]
15. Wang S, Fan C, Hsu CH, Sun Q, Yang F. A vertical handoff method via self-selection decision tree for internet of vehicles. IEEE Syst J. 2014;10(3):1183–92. doi:10.1109/JSYST.2014.2306210. [Google Scholar] [CrossRef]
16. Ma B, Wang D, Xie X. Robust vertical handoff algorithm based on decision tree in vehicle heterogeneous network. J Electron Inf Technol. 2017;39(7):1719–26. doi:10.11999/JEIT161182. [Google Scholar] [CrossRef]
17. Jahangeer N, Mustafa Z, Aldabbas H. Utilizing a hybrid cat-swarm optimization algorithm for seamless vertical handoff in vanet. Wirel Pers Commun. 2024;137(1):495–521. doi:10.1007/s11277-024-11424-5. [Google Scholar] [CrossRef]
18. Goudarzi S, Hassan WH, Anisi MH, Soleymani SA. MDP-based network selection scheme by genetic algorithm and simulated annealing for vertical-handover in heterogeneous wireless networks. Wirel Pers Commun. 2017;92:399–436. doi:10.1007/s11277-016-3549-5. [Google Scholar] [CrossRef]
19. Kustiawan I, Chi KH. Handoff decision using a Kalman filter and fuzzy logic in heterogeneous wireless networks. IEEE Commun Lett. 2015;19(12):2258–61. doi:10.1109/LCOMM.2015.2495212. [Google Scholar] [CrossRef]
20. Çalhan A, Çeken C. Artificial neural network based vertical handoff algorithm for reducing handoff latency. Wirel Pers Commun. 2013;71:2399–415. doi:10.1007/s11277-012-0944-4. [Google Scholar] [CrossRef]
21. Zhang H, Lu Z, Wen X, Hu Z. QoE-based reduction of handover delay for multimedia application in IEEE 802.11 networks. IEEE Commun Lett. 2015;19(11):1873–6. doi:10.1109/LCOMM.2015.2459048. [Google Scholar] [CrossRef]
22. Chen J, Wang Y, Li Y, Wang E. QoE-aware intelligent vertical handoff scheme over heterogeneous wireless access networks. IEEE Access. 2018;6:38285–93. doi:10.1109/ACCESS.2018.2853730. [Google Scholar] [CrossRef]
23. Frometa Fonseca D, Genoves Guzman B, Luca Martena G, Bian R, Haas H, Giustiniano D. Prediction-model-assisted reinforcement learning algorithm for handover decision-making in hybrid LiFi and WiFi networks. J Opt Commun Netw. 2024;16(2):159–70. doi:10.1364/JOCN.495234. [Google Scholar] [CrossRef]
24. Ke C, Wang M, Qin H, Ke X. Research on network handover based on user movement prediction in visible light communication and Wi-Fi heterogeneous networks. Appl Sci. 2025;15(4):2188. doi:10.3390/app15042188. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools