
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Dynamic Weighted Spherical Particle Swarm Optimization for UAV Path Planning in Complex Environments
1 College of Physics and Information Engineering, Minnan Normal University, Zhangzhou, 363000, China
2 Key Lab of Intelligent Optimization and Information Processing, Minnan Normal University, Zhangzhou, 363000, China
3 Key Lab of Light Field Manipulation and System Integration Applications in Fujian Province, Zhangzhou, 363000, China
* Corresponding Authors: Yuye Wang. Email: ; Fei Yu. Email:
Computers, Materials & Continua 2026, 87(2), 44 https://doi.org/10.32604/cmc.2026.073861
Received 27 September 2025; Accepted 22 December 2025; Issue published 12 March 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Path planning for Unmanned Aerial Vehicles (UAVs) in complex environments presents several challenges. Traditional algorithms often struggle with the complexity of high-dimensional search spaces, leading to inefficiencies. Additionally, the non-linear nature of cost functions can cause algorithms to become trapped in local optima. Furthermore, there is often a lack of adequate consideration for real-world constraints, for example, due to the necessity for obstacle avoidance or because of the restrictions of flight safety. To address the aforementioned issues, this paper proposes a dynamic weighted spherical particle swarm optimization (DW-SPSO) algorithm. The algorithm adopts a dual Sigmoid-based adaptive weight adjustment mechanism for balancing global exploration and local exploitation, as well as a lens-based opposition learning one to improve search flexibility and solution diversity. Simulation experiments on real digital elevation models demonstrate that DW-SPSO significantly outperforms recent state-of-the-art particle swarm optimization (PSO) variants in terms of path safety, smoothness, and convergence speed. The performance superiority is statistically validated by the Wilcoxon signed-rank test. The results confirm the algorithm’s effectiveness in generating high-quality UAV paths under diverse threat conditions, offering a robust solution for autonomous navigation systems.Keywords
Over the past few decades, Unmanned Aerial Vehicles (UAVs) have been widely used for reconnaissance and surveillance, express delivery, and rescue purposes. A key part of the UAV navigation system is to plan the optimal flight routing. The flight route planning task involves identifying multiple flight waypoints from origin to destination while accounting for various operational constraints, including environmental factors and energy efficiency considerations [1].
Secure path planning for UAVs is highly important in improving the autonomy and intelligence of UAVs, thus attracting much attention from people. Concerning the path planning challenges for UAVs or robots, various techniques have been proposed by scholars both domestically and internationally [2,3]. For instance, the A* algorithm is capable of identifying near-optimal paths in simple, small-scale environments through heuristic cost evaluation. In complex and exponentially expanding search spaces, challenges arise in accurately estimating unknown path costs, leading to suboptimal solutions and increased computation time [4]. In contrast, the traditional RRT with a random tree can efficiently find a feasible path by randomly sampling points in low-dimensional environments with limited knowledge, outperforming environment-dependent methods such as the Probabilistic Roadmap for single-query planning. However, due to its inherent cost-agnostic nature, RRT cannot guarantee optimality, exhibiting a low probability of achieving optimal solutions in large-scale search spaces and failing to meet practical demands for rapid, high-quality path generation [5,6].
Metaheuristic algorithms are different from classical methods in that they can solve complex combinatorial optimization problems better. Therefore, they were extensively employed in multi-UAV path-planning research. These are genetic algorithms (GA) [7] and differential evolution (DE) [8]. Algorithms for swarm intelligence include ant colony algorithm(ACO) [9], the artificial bee colony (ABC) algorithm [10], the moth flame optimization (MFO) [11], and the butterfly optimization algorithm (BOA) [12]. Further refinements of metaheuristics are evident in domains like energy systems, where a stable social learning swarm optimizer excelled in photovoltaic design optimization [13], highlighting a focus on stability and reliability—equally vital for robust UAV path planning. Particle swarm optimization (PSO) [14,15], in particular, has been extensively utilized, and numerous PSO variants have been proposed.
The PSO algorithm is a collective behavior inspired by the swarm intelligence observed in bird flocks and fish schools. PSO was selected for UAV path planning owing to its computational efficiency, rapid convergence, and adaptability to complex environments [16,17]. Unlike evolutionary algorithms that depend on mutation and crossover, PSO achieves stable convergence with lower computational cost by balancing individual and collective intelligence. Its parallel structure also facilitates real-time execution on embedded systems, ideal for UAV applications. Its effectiveness stems from two intrinsic swarm intelligence principles: cognitive coherence (individual experience) and social coherence (collective experience). In contrast to traditional evolutionary algorithms, which depend on mutation and crossover operations, PSO allows each particle to iteratively enhance solutions by dynamically balancing its own historical best performance with the swarm’s global best. This unique mechanism allows PSO to converge stably toward near-optimal solutions, significantly cutting computational time compared to other nature-inspired methods. Moreover, PSO shows limited sensitivity to initial conditions and objective function variations, while adapting to complex environments through minor parametric adjustments, mainly involving an acceleration coefficient and two weighting factors. Novel analytical frameworks have advanced both the theoretical understanding and practical efficacy of metaheuristics. For instance, complex network theory has been employed to reveal how swarm connectivity influences PSO performance [18], while spherical vector-based and adaptive PSO variants have demonstrated significant improvements in path planning under threats and complex system optimization, respectively [19,20]. Owing to its inherently parallel architecture, PSO can be efficiently implemented on multi-core processors, GPUs, or distributed computing clusters, fulfilling real-time processing needs for both offline and online path planning scenarios [21]. Leveraging these benefits, the PSO algorithm is extensively utilized in UAV path planning, with several enhanced variants having been developed. Phung and Ha [22] developed a motion-encoded particle swarm optimization (MPSO) algorithm for UAV moving target search, encoding search trajectories as motion segments to preserve swarm coherence.
Observation shows that while current UAV path planning algorithms may enhance efficiency temporarily, they usually have a sluggish convergence rate and a tendency to be captured by local optima. Even more critically, they do not properly guarantee UAV operation safety. The spherical vector particle swarm optimization (SPSO) algorithm was proposed by Phung and Ha [14], which incorporates spherical vector encoding to inherently link with UAV kinematics, thereby guaranteeing path feasibility. However, conventional fixed weight approaches lack the capacity to dynamically balance exploration and exploitation, resulting in delayed response to emergent threats. Building on these insights and utilizing the flight characteristics of UAVs, this paper presents a novel dynamic weighted spherical particle swarm optimization (DW-SPSO) algorithm. This advancement integrates real-time threat distance adaptive coefficient adjustment to optimize the trade-off between global exploration and local exploitation. Moreover, to increase route diversity under threat scenarios and enhance path safety, a lens imaging principle-based opposition learning strategy is integrated to boost the algorithm’s exploratory and exploitative abilities.
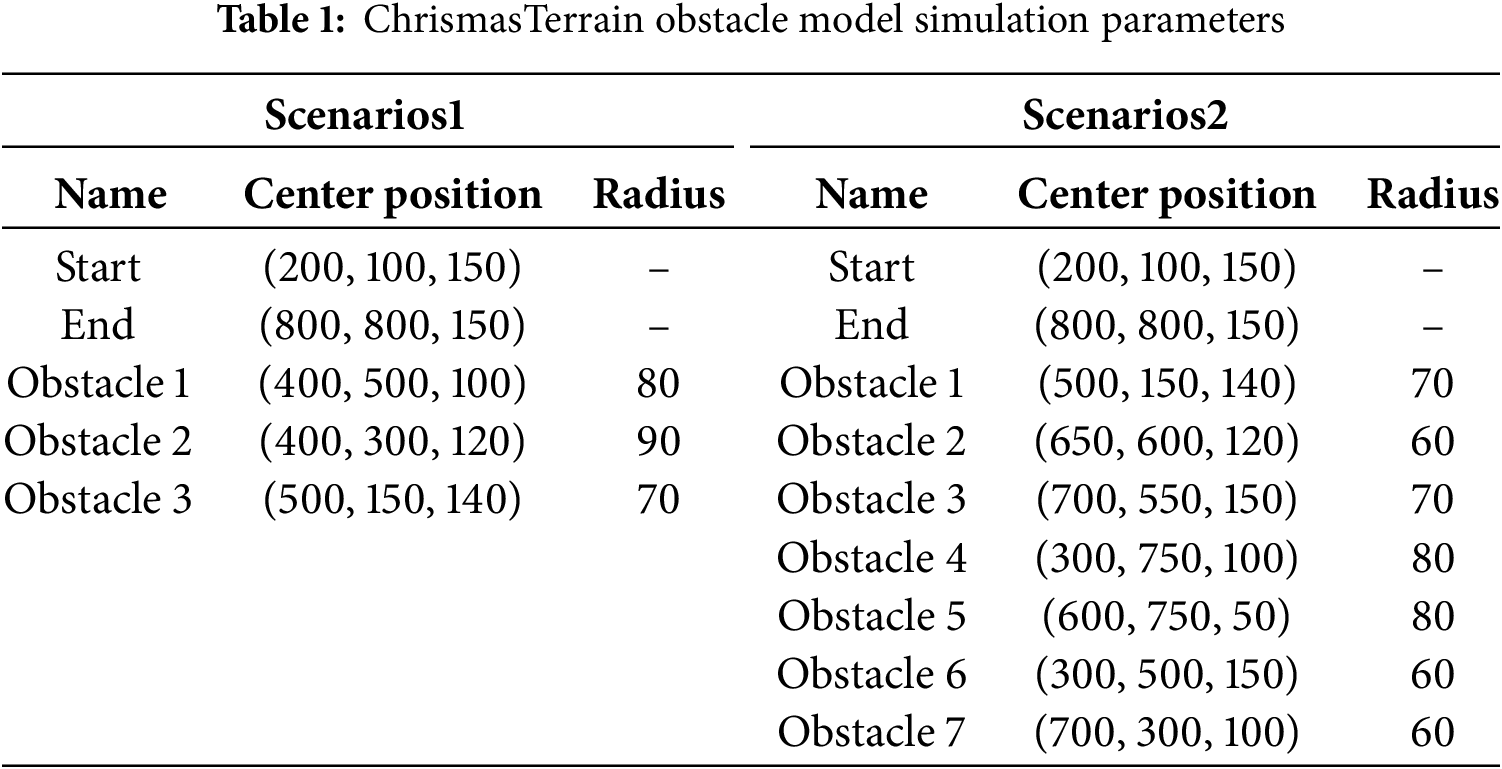
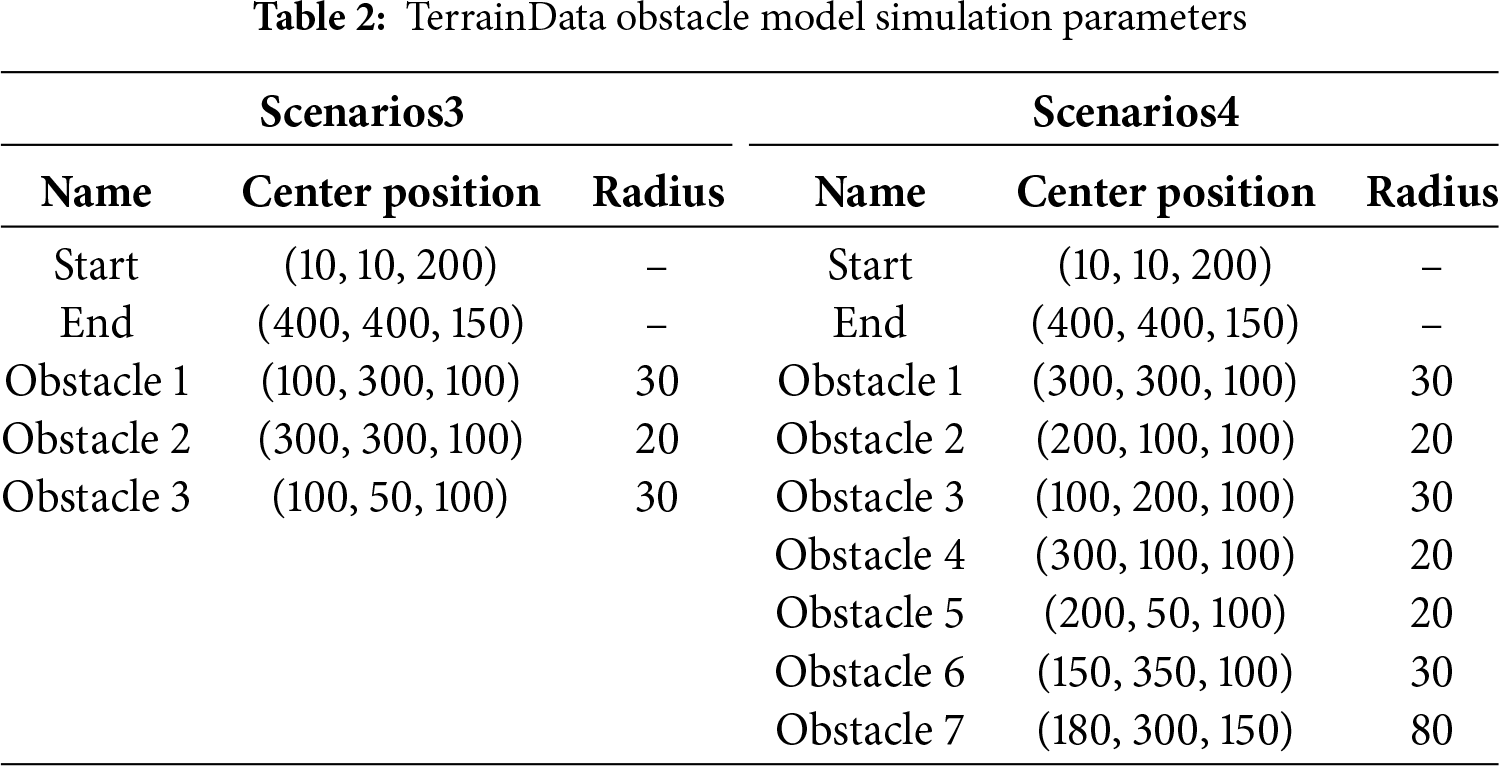
The UAV path planning issue is articulated by establishing an objective function that is capable of accounting for differing needs and restrictions related to UAVs as well as to flight paths. A novel PSO algorithm with some improvements through strategic application is provided. This process leverages the UAV’s configuration space to generate high-quality solutions. Using 2 real digital elevation model (DEM) maps, ChrismasTerrain and TerrainData, create both simple and complex terrain with 3 and 7 obstacles, respectively. The enhancement algorithm is compared with the original SPSO and other metaheuristic approaches. The innovations and contributions of this paper are as follows:
• Dual Sigmoids enable dynamic weight adjustment for balancing global exploration and local exploitation.
• A lens-based opposition learning strategy is integrated to boost algorithm flexibility and broaden the search range.
• Simulation experiments on both simple and complex terrains, and comparisons to other algorithms prove that the improvement of the algorithm is effective and practicable.
• The algorithm demonstrates significant advantages in UAV path-planning for complex terrains, verifying its practical utility.
The remainder of this paper is structured as follows. Section 2 formulates the threat environment model and defines the cost functions for UAV path planning. Section 3 details the proposed DW-SPSO algorithm, including the spherical vector encoding, adaptive weighting strategy, and lens-based opposition learning mechanism. Section 4 presents the experimental setup, simulation results, a comprehensive comparative analysis with state-of-the-art algorithms, and a statistical performance validation using the Wilcoxon signed-rank test. Finally, Section 5 concludes the paper by summarizing the findings and suggesting directions for future research.
This study formulates the path planning problem into the following cost function, incorporating optimal criteria and relevant constraints for UAVs.
Defining appropriate criteria tailored to specific operational scenarios is crucial for a UAV performing a mission. In this context, the objective is to minimize distance and utilize the flight path
2.2 Safety and Feasibility Constraints
UAV path planning: Completing the path planning requires ensuring the safe movement of the UAV by mitigating threats posed by obstacles. Let K denote the set of all threats, with each threat modeled as a cylinder. According to the definition illustrated in Fig. 1,
Figure 1: Determination of the threat cost
The threat cost
The safety diameter D is determined by the physical dimensions of the UAV, while the safety margin S is influenced by various operational factors, including environmental conditions and positioning system accuracy. For example, in static environments with reliable GPS, S typically ranges from several tens of meters.
During mission execution, the UAV’s flying altitude is typically constrained between predefined minimum and maximum thresholds, denoted as
The altitude
Evaluating the smoothing cost requires calculating both the turning angle and the climbing angle. As illustrated in Fig. 2 and mathematically defined in Eq. (6), the turning angle
Figure 2: Turning and climbing angle calculation
Thus, the turning angle is determined by:
The climb angle, denoted as
The smoothing cost is formulated as follows:
where
Taking into account the optimality, safety, and feasibility constraints related to the path
Choosing the most suitable function for UAV path planning is crucial. This study uses the optimal overall cost function in complex environments with multiple threats during UAV navigation as a suitable function. The coefficients
3.1 Particle Swarm Optimization Algorithm Based on Spherical Vector
The SPSO algorithm encodes each flight path as a sequence of vectors, where each vector represents the UAV’s movement from one waypoint to the next [14]. These vectors are expressed in spherical coordinates and comprise three components: magnitude
The spherical vector
In these equations,
Using spherical vectors in SPSO mainly relies on improvement in navigation safety through establishing mathematical correlations between the vector components (magnitude, elevation, and azimuth) and the UAV’s kinematic parameters (velocity, turning angle, and climb angle). With this, particle-based solutions search through space-configuration instead of spaceCartesian, thereby increasing the possibility of finding good quality trajectories. Notably, the elevation and azimuth parameters inherently enforce constraints on steering and climb angles through their geometric definitions, substantially constraining the solution space.
3.2 Adaptive Weighting Strategy
Conventional UAV path planning employs metaheuristic algorithms with static parameters to strike a balance between exploration and exploitation. Fixed acceleration coefficients and inertia weights lack adaptability to nonlinear cost functions or dynamic threats. Similarly, standard SPSO uses static spherical vector encoding with constant social-cognitive coefficients, integrating UAV kinematics geometrically but missing the dynamic exploration-exploitation balance. This rigidity causes slow convergence and local optima trapping in complex environments due to unresponsiveness to changing solution landscapes. To address this limitation, a dual Sigmoid-based adaptive acceleration mechanism modulating cognitive and social coefficients in real-time via particle-best Euclidean distances and iteration phases. The proposed mechanism for dynamic search landscapes boosts optimization efficiency and solution quality.
The proposed mechanism adaptively adjusts the cognitive coefficient
The parameters
The inherent monotonic increasing property of the Sigmoid function is central to the mechanism’s behavior. The acceleration coefficients increase as the corresponding distances increase. When a particle is far from a the best position, the argument of the Sigmoid becomes a large positive number, causing
By incorporating this dynamic state awareness and phase-dependent tuning into the acceleration coefficients, the proposed mechanism effectively addresses the rigidity of static PSO parameter configurations. The proposed mechanism offers a more adaptive, efficient, and intelligent approach to balancing exploration and exploitation in complex UAV path planning problems.
3.3 Lens-Based Opposition Learning Strategy
To overcome the limitations of the SPSO algorithm in balancing global exploration and local exploitation during UAV path planning, which often leads to premature convergence and slow optimization, this paper incorporates a lens imaging-based opposition learning strategy [23]. This method enhances the algorithm’s ability to explore uncharted regions of the search space while simultaneously refining solutions in promising areas, thereby improving both population diversity and convergence speed. The core idea is inspired by the conjugate relationship between an object and its image in geometric optics, where a convex lens generates a symmetrical image of an object. By analogizing the current solution (particle position) to an object, its opposition solution (mirror point) can be dynamically generated within the solution space, facilitating a bidirectional search mechanism.
Mathematically, for a particle located at position
Here,
where
Figure 3: Oppositional learning based on lens imaging principle
The integration of this lens-based opposition learning into the SPSO framework occurs after the standard velocity and position update. For each particle, an opposition solution is generated in the spherical coordinate space using Eq. (20). The fitness of this new solution is evaluated and compared against the original particle’s fitness. If the opposition solution yields a better fitness value, the opposition solution replaces the current particle in the swarm. This mechanism injects new, high-quality solutions into the population, enhancing diversity and providing an effective means to escape local optima. The strategy systematically improves the algorithm’s performance by leveraging the inherent duality and symmetry of optical systems, resulting in a more robust and efficient balance between exploration and exploitation for complex UAV path planning problems.
3.4 Application of DW-SPSO in UAV Track Planning
The implementation of the DW-SPSO algorithm in the trajectory planning of UAVs incorporates spherical vector encoding, dynamic weight adjustment, and a lens-based opposition learning strategy, thereby establishing a comprehensive optimization framework. The algorithm’s core task is to balance global exploration and local exploitation, enhancing solution diversity through concepts from geometric optics theory. This is an attempt to create relatively safe and smooth flight paths in dangerous threat environments. Flowchart of DW-SPSO, as delineated in Algorithm 1, shares a structural resemblance with other PSO algorithms, including parameter initialization, particle generation, and swarm evolution. Nevertheless, DW-SPSO primarily distinguishes itself from other PSO algorithms through the representation of particle positions and velocities, as well as the update equations. This unique design enables DW-SPSO to address the path planning issue for UAVs in complex environments more effectively, ensuring their safe and efficient task execution.
4 Experimental Simulation and Analysis
To examine the performance of the enhanced PSO algorithm, a series of computational simulations were conducted for comparative analysis and experimental verification.
The evaluation scenarios are based on the public 5 metre DEM of Australia, derived from a LiDAR dataset, openly provided by Australia [24]. This dataset is available under a Creative Commons Attribution 4.0 International Licence from the official portal (https://elevation.fsdf.org.au/). Two distinct terrain patches on Christmas Island (approximate extent:
The proposed DW-SPSO is compared with standard PSO [25] and some state-of-the-art PSO variant algorithms, including APSO [26], AWPSO [27], DSPSO [28], SPSO [14], VPPSO [29], PPSOBAS [30] and TS-CEPSO [31]. APSO adapts parameters based on the population state. AWPSO employs an S-type function-based weighting strategy. DSPSO incorporates dynamic differential mutation. SPSO utilizes spherical coordinates for path encoding. VPPSO uses a “velocity pausing” mechanism to maintain diversity. PPSOBAS hybridizes PSO with the Beetle Antennae Search algorithm. TS-CEPSO integrates chaotic maps and feasibility rules for complex constraints.
To ensure experimental fairness and comparability, all algorithms were configured under consistent conditions: a population size of 100 and a maximum of 100 iterations. The parameter settings for all compared algorithms were meticulously adopted from their respective original publications or authoritative implementations to ensure a faithful and unbiased comparison. The complete parameter configurations are summarized in Table 3.
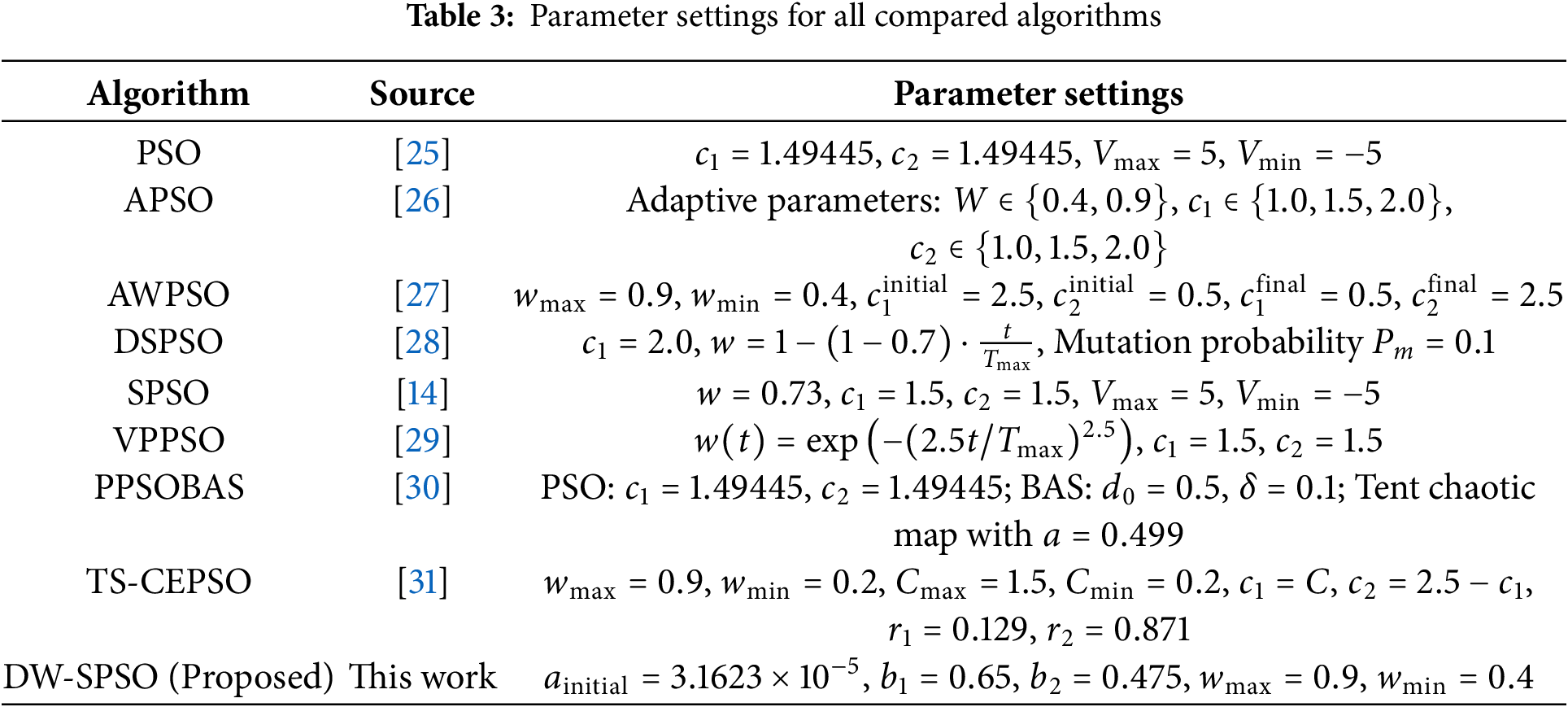
For the proposed DW-SPSO algorithm, the key parameters of the dual Sigmoid mechanism (
A paired sample
4.3 Comparison between PSO Algorithms
To comprehensively assess the performance of the proposed DW-SPSO algorithm. The experiments were performed on two distinct terrain models (ChristmasTerrain and TerrainData) with varying obstacle complexities. They examined the result in terms of the quality of the path, whether it converged or not, as well as in terms of significance.
To further quantify the path quality, a detailed analysis was conducted on three critical metrics derived from Eqs. (6)–(8): climb angle, safe distance, and smoothness score. As shown in Table 4, DW-SPSO achieves the best overall performance with a balanced combination of these metrics. Specifically, the algorithm maintains a moderate climb angle of
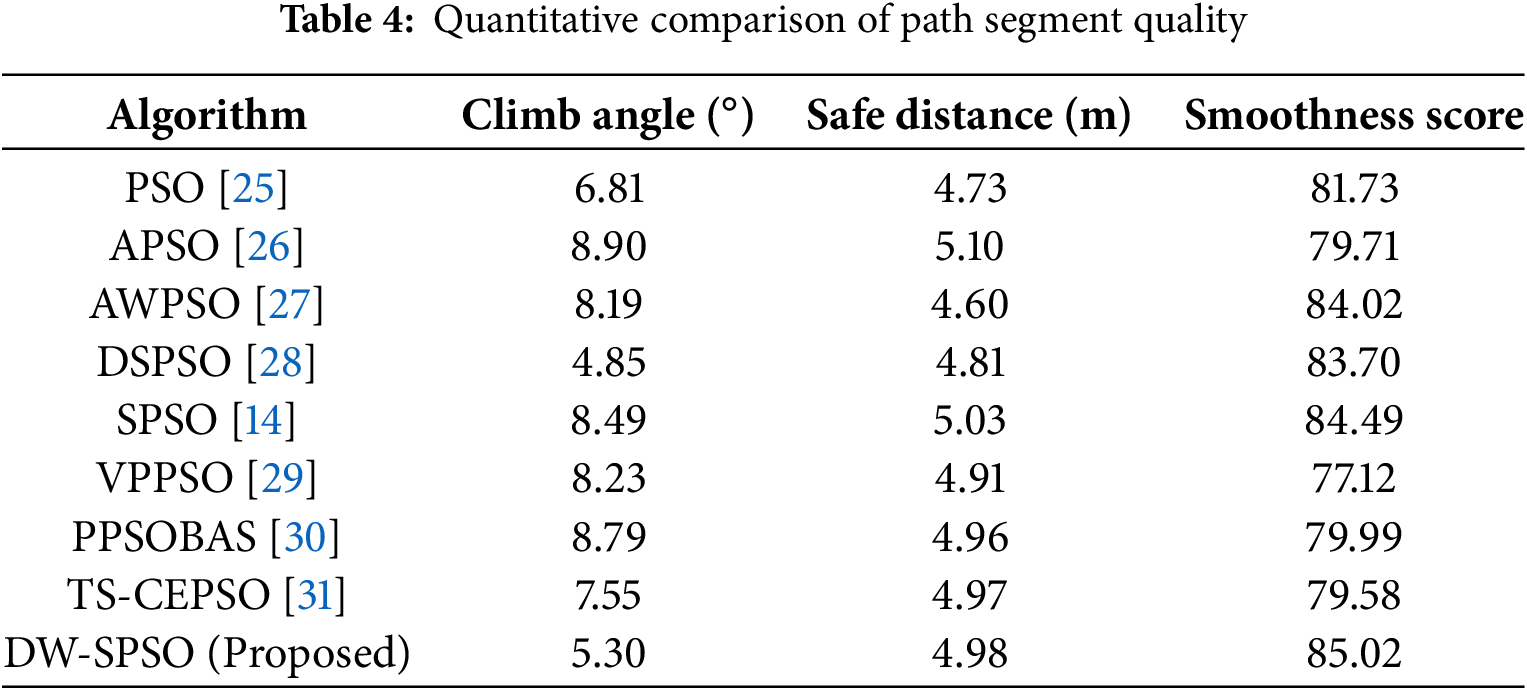
Fig. 4 shows the top-down views of the paths taken by the compared PSO algorithms for the Christmas Terrain model and TerrainData model, respectively, All algorithms successfully generated feasible paths that satisfied constraints like path length, obstacle avoidance, and smoothness. Notably, the paths produced by DW-SPSO exhibit superior adaptability to complex environments, with smoother transitions and fewer sharp turns, as highlighted in Fig. 5. This demonstrates the effectiveness of the dynamic weight adjustment mechanism and lens-based opposition learning in enhancing path quality.
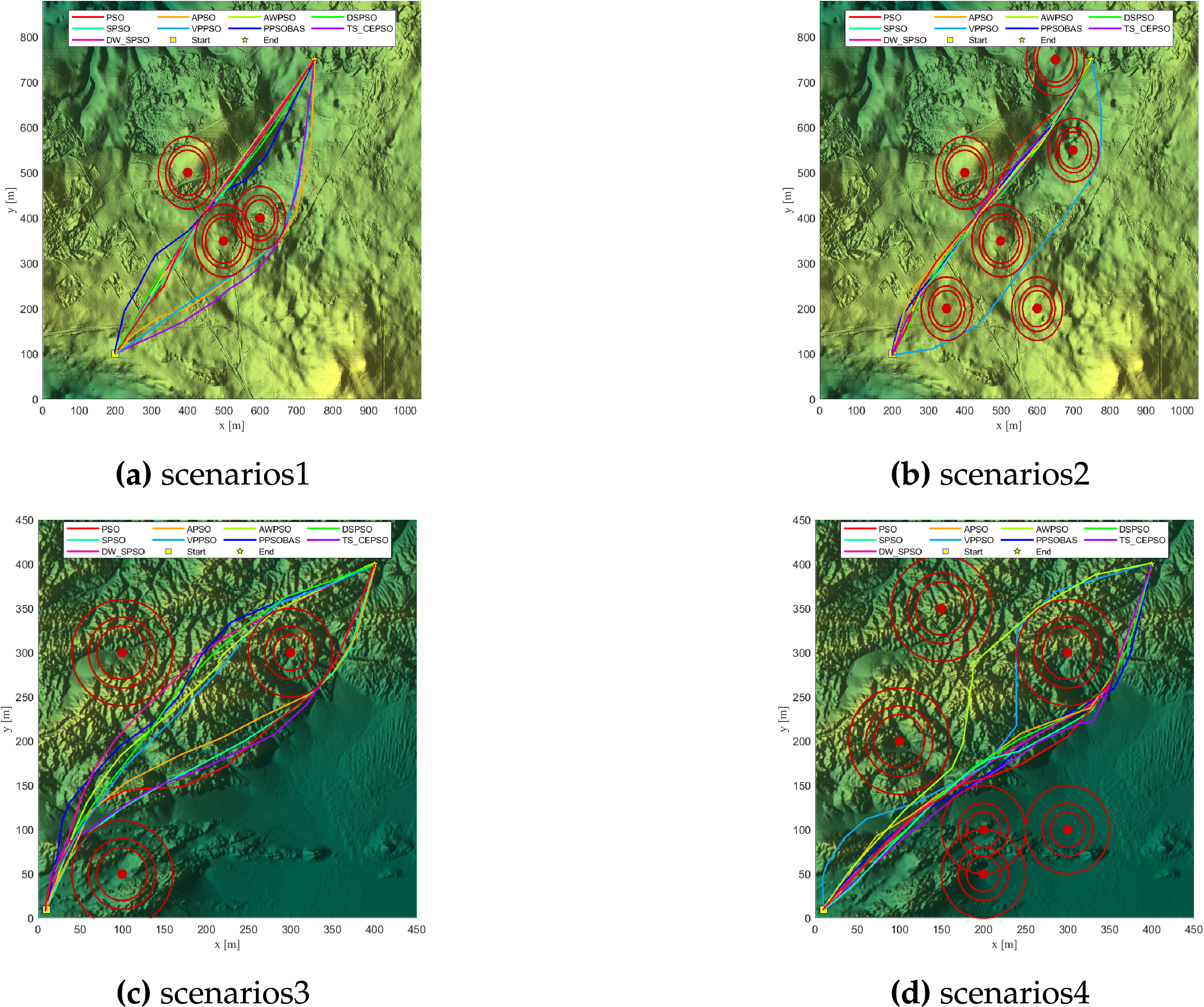
Figure 4: Top view of PSO paths on model for scenarios 1 and 4
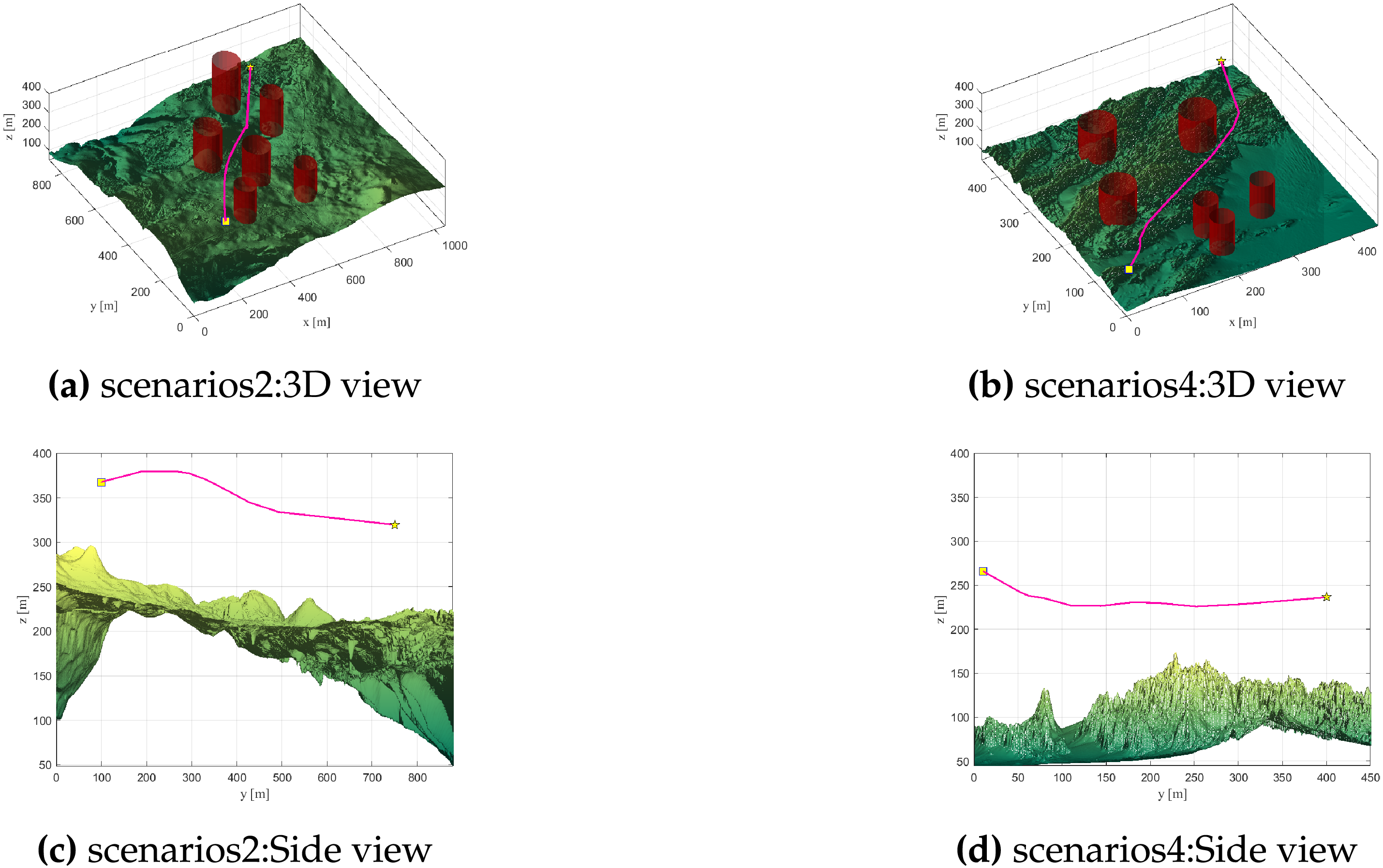
Figure 5: The planned paths generated by DW-SPSO for scenarios 2 and 4
DW-SPSO’s computational efficiency was evaluated against standard PSO and SPSO. All three algorithms share theoretical time complexity
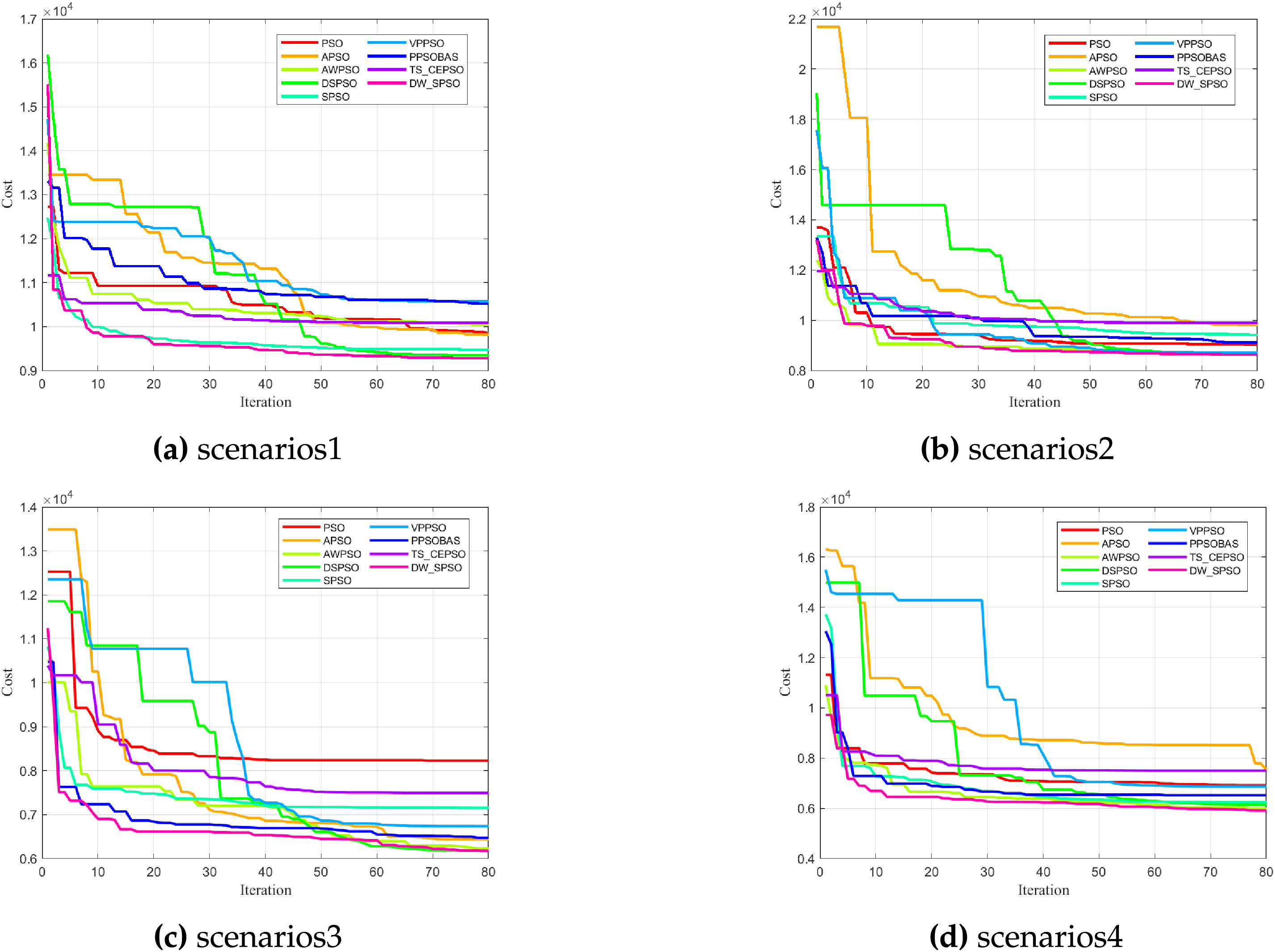
Figure 6: Best fitness of DW-SPSO and metaheuristic algorithms on the model
Fig. 6 shows the convergence trend of the best fitness values with respect to iteration. DW-SPSO is always faster and achieves better fitness values compared to other algorithms, indicating its rapid convergence and robust optimization capability. The dual Sigmoid-based adaptive acceleration mechanism enables DW-SPSO to balance exploration and exploitation effectively, avoiding premature convergence to local optima.
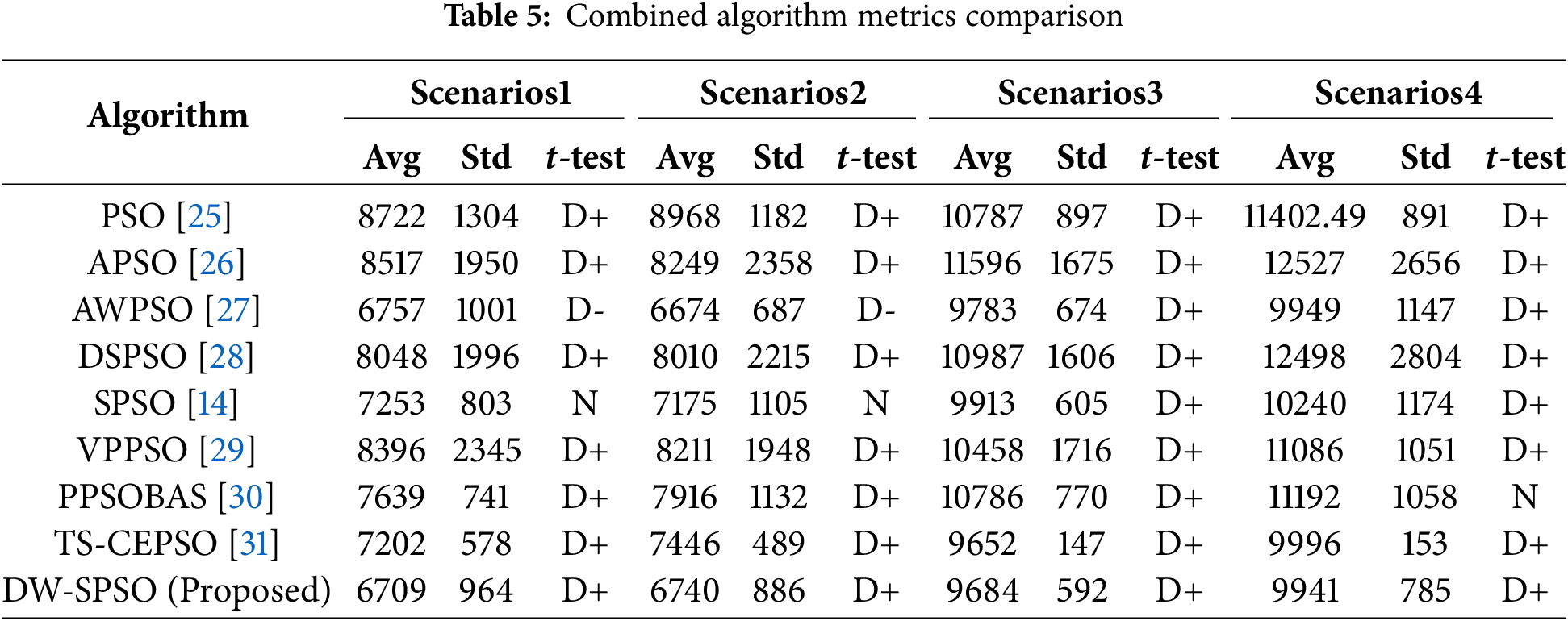
Table 5 presents a summary of the average fitness values. All variants converge similarly, with the exception of VPPSO, due to its velocity pausing mechanism. This algorithm deliberately halts velocity updates when diversity metrics fall below certain thresholds, resulting in periodic plateaus. Additionally, standard deviations and paired t-test results are provided for the ChristmasTerrain and TerrainData models, respectively. DW-SPSO demonstrates superior performance compared to most algorithms, as indicated by its lower average fitness values and smaller standard deviations, which suggest higher solution quality and stability. The t-test results (denoted as D+) confirm that the performance improvements of DW-SPSO are statistically significant in most scenarios.
The Wilcoxon signed-rank test [33] results unequivocally demonstrate the superiority of the proposed DW-SPSO algorithm. As shown in Table 6, DW-SPSO achieves statistically significant improvements (
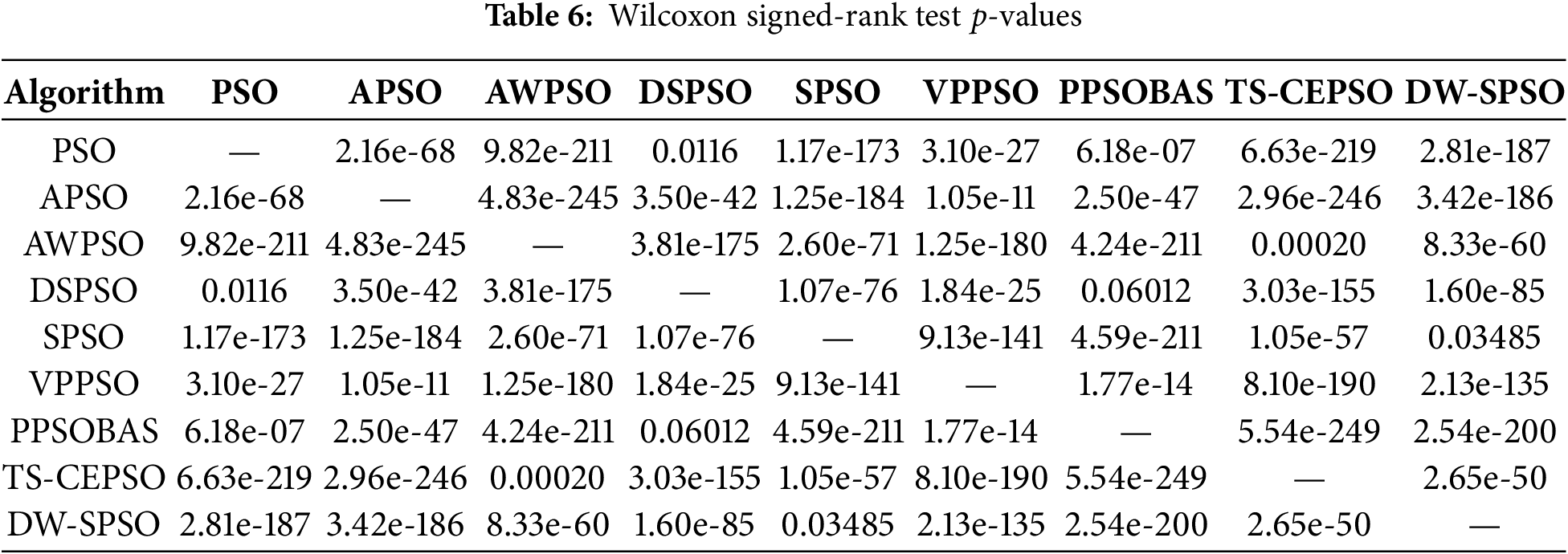
To provide a more robust statistical verification that is insensitive to non-normal data distributions, the Wilcoxon signed-rank test was further conducted the Wilcoxon signed-rank test on the results from 30 independent runs. The detailed
4.4 Ablation and Sensitivity Testing
To thoroughly analyze the contributions of individual components in the DW-SPSO algorithm and evaluate parameter sensitivity, systematic ablation experiments and sensitivity tests. The tests were performed in a simplified 150
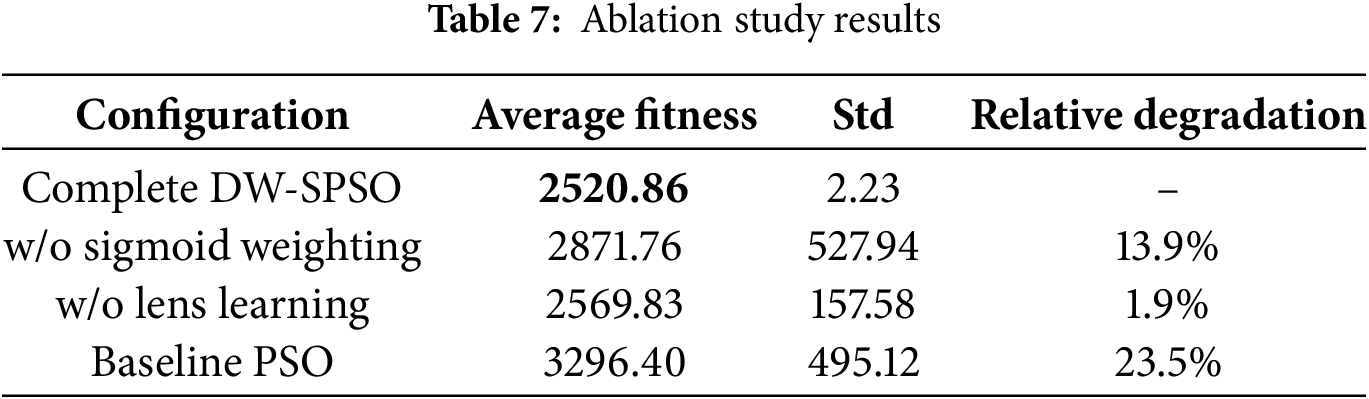
Ablation studies were conducted by systematically disabling key components of the proposed algorithm. As shown in Table 7 (with the best-performing configuration highlighted in bold), the complete DW-SPSO achieved the best performance with an average fitness of 2520.86. Removing the dual Sigmoid weighting mechanism resulted in a 13.9% performance degradation (fitness: 2871.76), demonstrating its crucial role in balancing exploration and exploitation. Disabling the lens opposition learning caused a 1.9% performance drop (fitness: 2569.83), confirming its contribution to solution diversity. The baseline PSO without any enhancements performed worse (fitness: 3296.40), highlighting the collective importance of both proposed mechanisms.
Parameter sensitivity analysis was extended beyond the typical
4.5 Hardware Implementation Considerations
To address the practical deployment of the proposed DW-SPSO algorithm, this section discusses its computational characteristics and potential integration with UAV hardware platforms. The algorithm’s inherent parallelism in fitness evaluation makes it suitable for hardware acceleration. Recent studies have demonstrated that the successful implementation of PSO variants on embedded systems is commonly used in UAV autopilots. For instance, El-Metwally et al. implemented a smart decision-making framework on NVIDIA Jetson platforms, showing real-time capability for autonomous navigation tasks. Similarly, research by Alhusseini et al. [20] showcased adaptive PSO optimization on embedded GPU architectures, achieving significant speedup for complex optimization problems.
While current simulations validate DW-SPSO for offline planning, its computational structure shows strong real-time replanning potential. Spherical vector encoding reduces dimensionality vs. Cartesian representations, and adaptive mechanisms minimize redundant computations. Future work will implement DW-SPSO on embedded processors (NVIDIA Jetson Orin, Qualcomm Snapdragon Ride), leveraging parallel computing for dynamic environment performance.
This paper proposed the DW-SPSO algorithm to address key challenges in UAV path planning within complex environments. By integrating a dual Sigmoid-based adaptive weight adjustment mechanism and a lens opposition learning strategy, the algorithm significantly enhances the balance between global exploration and local exploitation. Simulation experiments demonstrate that DW-SPSO outperforms existing PSO variants in terms of path safety, smoothness, and convergence speed in complex threat scenarios. Specifically, DW-SPSO achieved an average fitness value of 6709 in Scenario 1 and 9941 in Scenario 4, representing improvements of up to 7.5% and 2.8%, respectively, compared to the baseline SPSO algorithm.
While the algorithm shows clear advantages in complex obstacle environments, there remains potential for optimizing performance balance and computational efficiency in simpler settings. Future work will focus on developing a multi-objective optimization framework that simultaneously optimizes metrics such as path length, energy consumption, and risk. Furthermore, research will expand to include dynamic obstacles and collaborative multi-UAV environments. Theoretical investigations using complex network analysis will also be pursued to better understand the swarm dynamics and convergence behavior of the proposed algorithm.
Acknowledgement: Not applicable.
Funding Statement: This work was supported by the National Natural Science Foundation of China (Grant No. 62106092), the Natural Science Foundation of Fujian Province (Grant Nos. 2024J01822, 2025J01981), and the Natural Science Foundation of Zhangzhou City (Grant No. ZZ2024J28).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Rui Yao, Yuye Wang, Fei Yu; algorithm implementation and data curation: Rui Yao; analysis and interpretation of results: Rui Yao, Yuye Wang, Fei Yu; draft manuscript preparation: Rui Yao; review, editing, and supervision: Yuye Wang, Fei Yu, Hongrun Wu, Zhenya Diao. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The digital elevation model (DEM) data used in this study are publicly available from Geoscience Australia at https://elevation.fsdf.org.au/.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Chan Y, Ng KK, Lee C, Hsu LT, Keung K. Wind dynamic and energy-efficiency path planning for unmanned aerial vehicles in the lower-level airspace and urban air mobility context. Sustain Energy Technol Assess. 2023;57(9):103202. doi:10.1016/j.seta.2023.103202. [Google Scholar] [CrossRef]
2. Gul F, Mir I, Abualigah L, Sumari P, Forestiero A. A consolidated review of path planning and optimization techniques: technical perspectives and future directions. Electronics. 2021;10(18):2250. doi:10.3390/electronics10182250. [Google Scholar] [CrossRef]
3. Maboudi M, Homaei M, Song S, Malihi S, Saadatseresht M, Gerke M. A review on viewpoints and path planning for UAV-based 3-D reconstruction. IEEE J Sel Top Appl Earth Obs Remote Sens. 2023;16(8):5026–48. doi:10.1109/jstars.2023.3276427. [Google Scholar] [CrossRef]
4. Penin B, Giordano PR, Chaumette F. Minimum-time trajectory planning under intermittent measurements. IEEE Robot Autom Lett. 2018;4(1):153–60. doi:10.1109/lra.2018.2883375. [Google Scholar] [CrossRef]
5. Pharpatara P, Hérissé B, Bestaoui Y. 3-D trajectory planning of aerial vehicles using RRT. IEEE Trans Control Syst Technol. 2016;25(3):1116–23. doi:10.1109/tcst.2016.2582144. [Google Scholar] [CrossRef]
6. Li Y, Wei W, Gao Y, Wang D, Fan Z. PQ-RRT*: an improved path planning algorithm for mobile robots. Expert Syst Appl. 2020;152(2):113425. doi:10.1016/j.eswa.2020.113425. [Google Scholar] [CrossRef]
7. Sonmez A, Kocyigit E, Kugu E. Optimal path planning for UAVs using genetic algorithm. In: 2015 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway, NJ, USA: IEEE; 2015. p. 50–5. doi:10.1109/ICUAS.2015.7152274. [Google Scholar] [CrossRef]
8. Chai X, Zheng Z, Xiao J, Yan L, Qu B, Wen P, et al. Multi-strategy fusion differential evolution algorithm for UAV path planning in complex environment. Aerosp Sci Technol. 2022;121(12):107287. doi:10.1016/j.ast.2021.107287. [Google Scholar] [CrossRef]
9. Perez-Carabaza S, Besada-Portas E, Lopez-Orozco JA, De La Cruz JM. Ant colony optimization for multi-UAV minimum time search in uncertain domains. Appl Soft Comput. 2018;62(4):789–806. doi:10.1016/j.asoc.2017.09.009. [Google Scholar] [CrossRef]
10. Xu C, Duan H, Liu F. Chaotic artificial bee colony approach to uninhabited combat air vehicle (UCAV) path planning. Aerosp Sci Technol. 2010;14(8):535–41. doi:10.1016/j.ast.2010.04.008. [Google Scholar] [CrossRef]
11. Karthik K, Balasubramanian C, Praveen R. Hybrid golden Jackal and moth flame optimization algorithm based coverage path planning in heterogeneous UAV networks. Sci Rep. 2025;15(1):31054. doi:10.1038/s41598-025-15345-6. [Google Scholar] [PubMed] [CrossRef]
12. Zhang Q, Barat A, Li N, Zhao R, Guo Q. Improved butterfly optimization algorithm based power cable UAV trajectory optimization algorithm. In: 2024 IEEE 7th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC). Piscataway, NJ, USA: IEEE; 2024. Vol. 7, p. 1106–11. doi:10.1109/itnec60942.2024.10733293. [Google Scholar] [CrossRef]
13. Deng L, Liu S. Advancing photovoltaic system design: an enhanced social learning swarm optimizer with guaranteed stability. Comput Ind. 2025;164(4):104209. doi:10.1016/j.compind.2024.104209. [Google Scholar] [CrossRef]
14. Phung MD, Ha QP. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl Soft Comput. 2021;107(2):107376. doi:10.1016/j.asoc.2021.107376. [Google Scholar] [CrossRef]
15. Yu Z, Si Z, Li X, Wang D, Song H. A novel hybrid particle swarm optimization algorithm for path planning of UAVs. IEEE Internet Things J. 2022;9(22):22547–58. doi:10.1109/jiot.2022.3182798. [Google Scholar] [CrossRef]
16. Sonny A, Yeduri SR, Cenkeramaddi LR. Autonomous UAV path planning using modified PSO for UAV-assisted wireless networks. IEEE Access. 2023;11:70353–67. doi:10.1109/access.2023.3293203. [Google Scholar] [CrossRef]
17. Meng Q, Chen K, Qu Q. PPSwarm: multi-UAV path planning based on hybrid PSO in complex scenarios. Drones. 2024;8(5):192. doi:10.3390/drones8050192. [Google Scholar] [CrossRef]
18. Deng L, Liu S. Collective dynamics of particle swarm optimization: a network science perspective. Physica A. 2025;675(6):130778. doi:10.1016/j.physa.2025.130778. [Google Scholar] [CrossRef]
19. Liu Y, Zhang H, Zheng H, Li Q, Tian Q. A spherical vector-based adaptive evolutionary particle swarm optimization for UAV path planning under threat conditions. Sci Rep. 2025;15(1):2116. doi:10.1038/s41598-025-85912-4. [Google Scholar] [PubMed] [CrossRef]
20. Alhusseini H, Abdali LM, Issa HA, Velkin VI. Adaptive particle swarm optimization based model predictive control MPPT algorithm for PV systems under partial shading conditions. Results Eng. 2025;28(9):107419. doi:10.2139/ssrn.5353112. [Google Scholar] [CrossRef]
21. Tan Y, Ding K. A survey on GPU-based implementation of swarm intelligence algorithms. IEEE Trans Cybern. 2015;46(9):2028–41. doi:10.1109/tcyb.2015.2460261. [Google Scholar] [PubMed] [CrossRef]
22. Phung MD, Ha QP. Motion-encoded particle swarm optimization for moving target search using UAVs. Appl Soft Comput. 2020;97:106705. doi:10.36227/techrxiv.13333298. [Google Scholar] [CrossRef]
23. Yu F, Guan J, Wu H, Chen Y, Xia X. Lens imaging opposition-based learning for differential evolution with cauchy perturbation. Appl Soft Comput. 2024;152(1):111211. doi:10.1016/j.asoc.2023.111211. [Google Scholar] [CrossRef]
24. Australia G. Digital elevation model (DEM) of Australia derived from LiDAR 5 metre grid. Canberra, ACT, Australia: Geoscience Australia; 2015. [Google Scholar]
25. Roberge V, Tarbouchi M, Labonté G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans Ind Inf. 2012;9(1):132–41. doi:10.1109/tii.2012.2198665. [Google Scholar] [CrossRef]
26. Zhan ZH, Zhang J, Li Y, Chung HSH. Adaptive particle swarm optimization. IEEE Trans Syst Man Cybern B. 2009;39(6):1362–81. doi:10.1109/tsmcb.2009.2015956. [Google Scholar] [PubMed] [CrossRef]
27. Liu W, Wang Z, Yuan Y, Zeng N, Hone K, Liu X. A novel sigmoid-function-based adaptive weighted particle swarm optimizer. IEEE Trans Cybern. 2019;51(2):1085–93. doi:10.1109/tcyb.2019.2925015. [Google Scholar] [PubMed] [CrossRef]
28. Zhang X, Wang X, Kang Q, Cheng J. Differential mutation and novel social learning particle swarm optimization algorithm. Inf Sci. 2019;480(24):109–29. doi:10.1016/j.ins.2018.12.030. [Google Scholar] [CrossRef]
29. Shami TM, Mirjalili S, Al-Eryani Y, Daoudi K, Izadi S, Abualigah L. Velocity pausing particle swarm optimization: a novel variant for global optimization. Neural Comput Appl. 2023;35(12):9193–223. doi:10.1007/s00521-022-08179-0. [Google Scholar] [CrossRef]
30. Wang L, Wu D, Gao Y. A reinforced particle swarm optimization algorithm based on beetle antenna search for UAV path planning. In: 2023 42nd Chinese Control Conference (CCC). Piscataway, NJ, USA: IEEE; 2023. p. 4455–60. doi:10.23919/ccc58697.2023.10240914. [Google Scholar] [CrossRef]
31. Shivani, Chauhan D, Rani D. A feasibility restoration particle swarm optimizer with chaotic maps for two-stage fixed-charge transportation problems. Swarm Evol Comput. 2024;91(1):101776. doi:10.1016/j.swevo.2024.101776. [Google Scholar] [CrossRef]
32. Hsu H, Lachenbruch PA. Paired t test. Hoboken, NJ, USA: John Wiley & Sons, Inc.; 2014. doi:10.4135/9781506359182. [Google Scholar] [CrossRef]
33. Hollander M, Wolfe DA, Chicken E. Nonparametric statistical methods. Hoboken, NJ, USA: John Wiley & Sons, Inc.; 2014. [Google Scholar]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools