
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
A Workflow Scheduling Method Based on the Combination of Tunicate Swarm Algorithm and Highest Response Ratio Next Scheduling
1 School of Computer Science and Technology, Shandong University of Technology, Zibo, China
2 NOVA Information Management School, Universidade Nova de Lisboa, Campus de Campolide, Lisboa, Portugal
* Corresponding Author: Jing Li. Email:
Computers, Materials & Continua 2026, 87(2), 84 https://doi.org/10.32604/cmc.2026.075063
Received 24 October 2025; Accepted 16 January 2026; Issue published 12 March 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Workflow scheduling is critical for efficient cloud resource management. This paper proposes Tunicate Swarm-Highest Response Ratio Next, a novel scheduler that synergistically combines the Tunicate Swarm Algorithm with the Highest Response Ratio Next policy. The Tunicate Swarm Algorithm generates a cost-minimizing task-to-VM mapping scheme, while the Highest Response Ratio Next dynamically dispatches tasks in the ready queue with the highest-priority. Experimental results demonstrate that the Tunicate Swarm-Highest Response Ratio Next reduces costs by up to 94.8% compared to meta-heuristic baselines. It also achieves competitive cost efficiency vs. a learning-based method while offering superior operational simplicity and efficiency, establishing it as a highly practical solution for dynamic cloud environments.Keywords
The cloud environment offers a wide range of diverse computing resources along with reliable data storage options, so many institutions are increasingly using cloud computing to handle workflows [1]. In the scheduling process, it is essential to rent and allocate suitable Virtual Machines (VMs) to execute a series of tasks or requests while minimizing both execution time and expenses [2]. Within cloud computing, workflow scheduling focuses on improving task deployment speed and lowering infrastructure costs by dynamically allocating tasks to appropriate virtual machines.
This type of problem is NP complete [3]. Existing scheduling approaches can be broadly categorized into several strands, each with distinct limitations. Traditional methods [4], such as list scheduling, are computationally efficient but often fail to address multi objective optimization under deadline constraints or adapt to dynamic, heterogeneous cloud environments. Heuristic and meta-heuristic algorithms (e.g., Genetic Algorithm (GA), Particle Swarm Optimization (PSO) and Ant Colony Optimization (ACO)) have been widely applied to workflow scheduling [5]. However, they frequently suffer from complex parameter tuning, high computational complexity as the problem scale increases, and slow convergence, making it challenging to minimize operational costs and avoid SLA (Service Level Agreement) violations efficiently [6–8]. We identify that their coupled decision-making process entangling strategic planning with operational dispatch is a primary source of these inefficiencies, leading to inherent trade offs between cost minimization and responsiveness.
More recent approaches seek greater adaptability. For instance, hyper-heuristic methods operate at a higher level of abstraction, aiming to select or dynamically generate heuristics [1]. While this promises flexibility, their performance is often contingent on the quality and diversity of the underlying heuristic pool, and significant overhead incurs in evaluating and switching between strategies. Similarly, Reinforcement Learning (RL)-based schedulers learn optimal policies through interaction with the environment [9,10] but often require extensive training data, sophisticated reward function, and may lack stability in non-stationary cloud settings. Both hyper-heuristic and the RL approaches hinder interpretability and real-time decision-making in production systems.
To address these challenges, this paper proposes the Tunicate Swarm-High Response Ratio Next (TS-HRRN) method, which employs a static two-layer architecture with highly responsive to dynamic workloads. It synergistically couples the Tunicate Swarm Algorithm (TSA) for global, cost-aware VM allocation with the HRRN policy for local, responsiveness-driven task dispatch. This fixed assignment of distinct, complementary roles eliminates the runtime overhead of dynamic algorithm selection or model inference, ensuring inherent stability and efficiency. Extensive evaluations against state-of-the-art schedulers demonstrate the significant improvements in cost-effectiveness and performance achieved by the TS-HRRN.
In summary, this paper makes the following main contributions:
• We propose the TS-HRRN method for the heterogeneous workflow scheduling problem, which aims to minimize total rental cost while preventing SLA violations.
• In the proposed TS-HRRN method, the TSA is used to select the VMs with the highest priority, and the HRRN is used to prioritize the tasks to be executed. The proposed TS-HRRN method shows potential to improve scientific workflow scheduling strategies.
• We use extensive experiments on real scientific workflow datasets to verify the effectiveness and efficiency of the proposed algorithm. Experimental results show that the TS-HRRN is superior to the referring algorithms in terms of cost minimization and algorithm stability.
The structure of the article is as follows: Section 2 introduces background knowledge; Section 3 introduces relevant work; Section 4 gives the collaborative use between two algorithms; Experimental and analytical results are given in Section 5; Finally, Section 6 summarizes the article.
This section introduces the background knowledge and definitions.
In cloud computing, a workflow is modeled as a Directed Acyclic Graph (DAG) in which each node represents an independent computational task and each edge specifies data or control dependency between tasks. Following the established cost model and definitions of cloud workflow scheduling [1], we formalize the problem as follows.
Definition 1: The
Among them,
The remaining time is calculated as follows:
The workflow in the ready queue is handled by a collection of VMs (V = {
where
We aim to lower the total expenses of workflow execution, including VM rental and penalties:
In the formulas above,
Definition 2: RentFee: an hourly cost for the VM offered by the worldwide cloud service industry [1,11,12]. The denominator and upper limit in Eq. (3) collectively transform this time interval into the total rental duration.
2.2 The Highest Response Ratio Next Scheduling
The workflow is represented as a DAG, where each node corresponds to an independent task and each edge indicates dependency—a predecessor task must be completed before its successor executes. The system first identifies schedulable tasks, defined as nodes whose predecessors have executed. These tasks constitute the Ready Queue. To determine an appropriate execution order, the HRRN algorithm is employed, which computes a response ratio for each task based on its waiting time and estimated service time, thereby favoring tasks that contribute to the overall system responsiveness.
The response ratio [13] R is calculated as:
where
2.3 The Mathematical Model of the TSA
The TSA is a meta-heuristic that emulates the jet propulsion and swarm behaviors of tunicates during foraging. Its mathematical model comprises two core processes.
2.3.1 Jet Propulsion Process of Tunicates
Tunicate achieves vertical migration behavior through its jet propulsion, which also includes the process of moving from one position in a specific direction to another.
a. To avoid conflicts between search individuals: a positional variable A is introduced to calculate the new position of each searched individual, effectively avoiding collision problems during searching.
Among them, G represents gravity, M is the interaction force between two search agents, with variables
b. Moving towards the best position: it is essential to calculate the location of the food source and the separation between searching entities to identify the optimal position. In the first iteration, the separation of the searched entity from the food source is:
PD represents the separation between the food source and the encapsulated entity, FS indicates the position of the food source,
c. Approaching the optimal position: the tunicate reaches a new position and updates according to the following formula:
After resolving individual conflicts and calculating positions with the food source, tunicate uses swarm intelligence to approach the optimal food source. We use Formula (13) to simulate the swarm intelligence of tunicate:
Early workflow research primarily focused on minimizing execution time. Rimal et al. leveraged idle cloud resources to reduce workflow makespan [14]. Meanwhile, Ahmed et al. proposed an enhanced HEFT algorithm that improved task prioritization and resource mapping [15]. Subsequently, scheduling objectives expanded to incorporate cost and deadline requirements. Djigal et al. introduced a two-stage list scheduling algorithm that reduced both cost and time [16]. Sun et al. optimized scheduling time by integrating critical path analysis and task merging into the HEFT algorithm [17]. In a similar vein, Chen et al. enhanced the Min-Min algorithm by treating data transmission time as a critical optimization factor [18].
Heuristic algorithms have been widely applied to workflow scheduling and have yielded substantial results. For instance, Mohammadzadeh et al. combined the Seagull and Grasshopper Optimization Algorithms to optimize cost and time; however, the complexity of their proposed approach may hinder its practical application [19]. Similarly, Mikram et al. integrated the PSO and GA to reduce completion time but did not account for dynamic environments [5]. Zeedan et al. employed an Enhanced Binary ABC within a Pareto frontier model, which demonstrated performance on specific problems [20]. Other notable approaches include Iranmanesh et al., who enhanced genetic operators for effective load balancing under deadline constraints [21], and Varshney et al., who leveraged an ant colony algorithm to optimize task migration for shorter time and lower cost [22]. Additionally, Chakravarthi et al. incorporated an encoding scheme to generate cost-effective schedules [23].
Beyond traditional heuristics, more advanced paradigms such as hyper-heuristic [1] and the RL [9,10] have been explored to enhance the adaptability. However, as discussed before, these methods have computational overhead and complexity in pursuit of generality, which motivates us to design a decoupled, yet responsive and cost-effective hybrid architecture.
3.3 Motivation for Algorithm Selection
Traditional workflow schedulers employed monolithic framework to simultaneously optimize task sequencing and resource allocation. This coupled approach forces a single algorithm to make conflicting decisions, leading to a fundamental trade-off: methods effective in global, cost-sensitive resource planning are often too slow to respond to dynamic task arrivals, while fast, responsive task dispatchers lack the global view necessary for overall cost minimization. Our TS-HRRN method breaks this paradigm by introducing a novel dual-priority scheduling architecture that strategically decouples these two concerns. In this architecture, the HRRN policy acts as a dedicated high frequency scheduler to dynamically prioritize tasks in the ready queue, thereby ensuring immediate system responsiveness. The TSA focuses on long term cost efficiency and the SLA compliance. The scheduler executes the optimal match by assigning the highest priority task from the HRRN queue to the most suitable VM as prescribed by the TSA generated scheme.
4.1 Execution Process of the Method
This article proposes collaborative scheduling of dynamic arrival workflows using the HRRN and the TSA. Fig. 1 illustrates the execution process: The high-level workflow structure is adapted from prior work [1], the core technical components and their interactions are original and depict our novel TS-HRRN architecture. When the workflow is uploaded to the cloud, the TSA is employed to generate an optimal task-to-VM matching scheme. Different tasks of the workflow are assigned to different VMs. The fitness function defines the overall cost and drives the global optimization. The HRRN is used to prioritize the tasks.
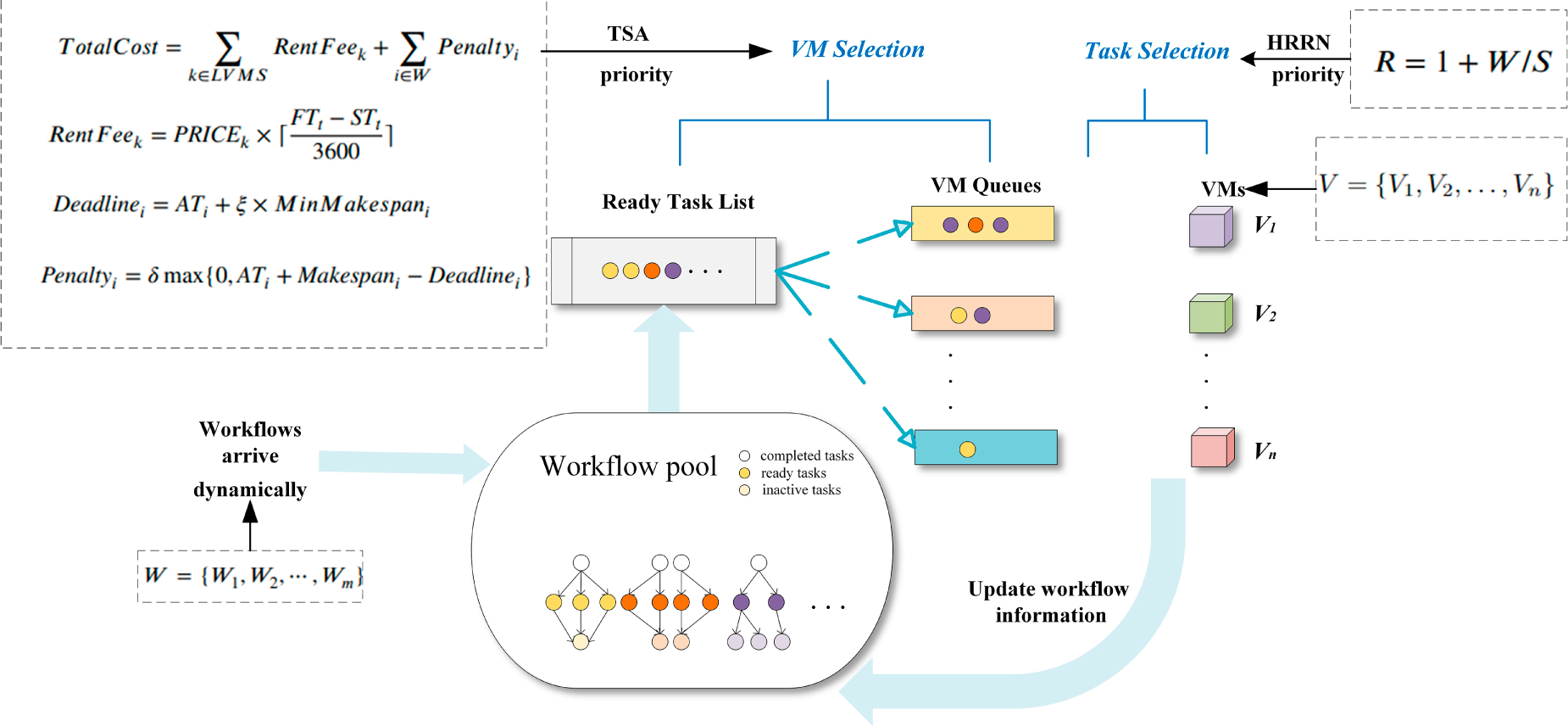
Figure 1: The execution process of the workflow.
Mapping the TSA to Cloud Workflow Scheduling
To apply the TSA to cloud workflow scheduling, each candidate solution (i.e., an individual of the population) represents a specific task-to-VM allocation scheme. By defining a fitness function that incorporates the execution time, the VM rental cost, and the SLA violation penalties, the TSA iteratively minimizes the total cost. The collective migration behavior of the swarm simulates the cost-driven optimization process, guiding the population toward more efficient scheduling solutions.
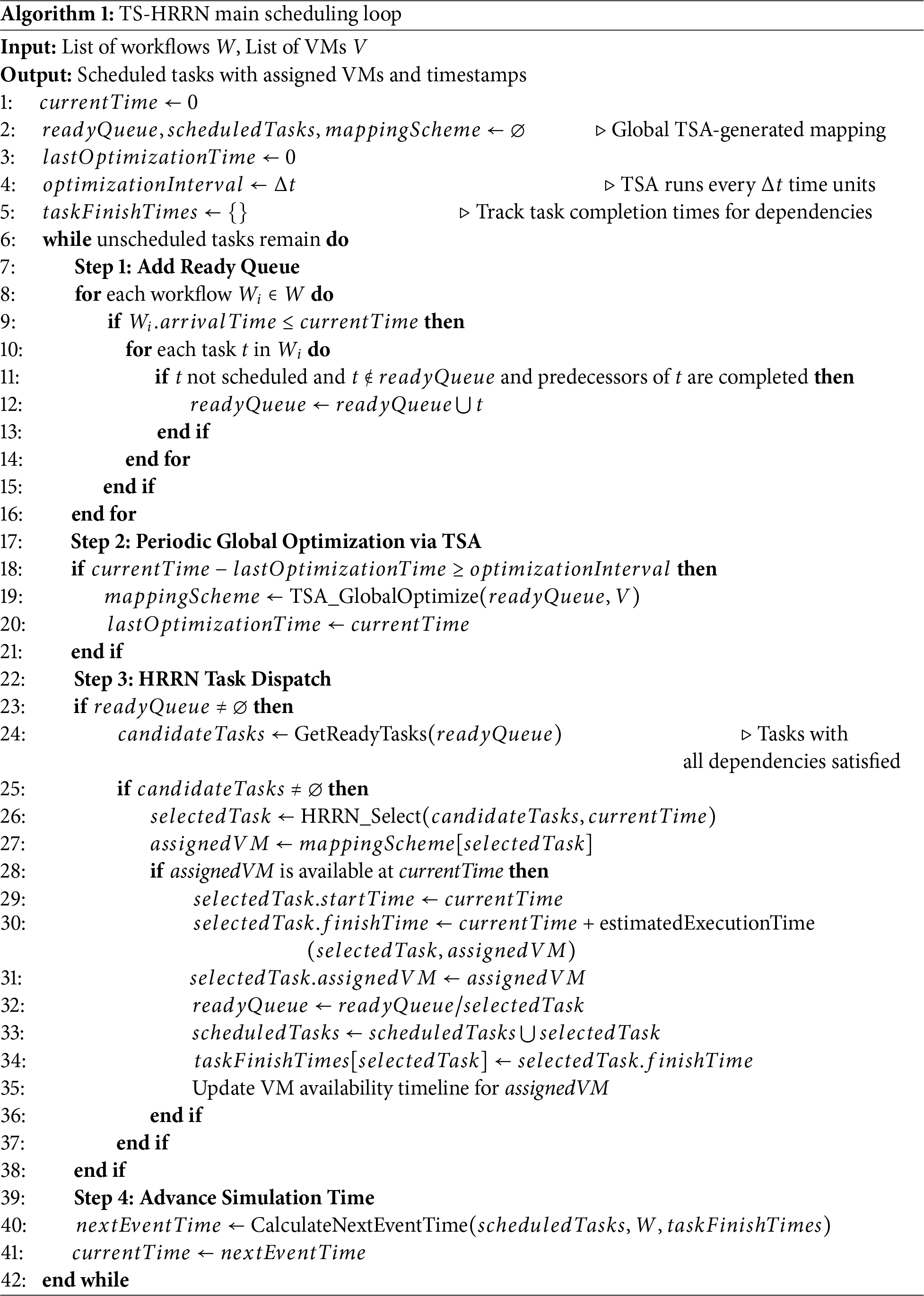
Algorithm 1 presents the main scheduling loop of the TS-HRRN, which implements the dual-layer architecture through coordinated execution. The algorithm initializes the simulation parameters, including the time, queues, and a global task-to-VM mapping scheme (lines 1–6). The core loop operates in four phases. First, it adds new tasks to the ready queue (lines 10–18). Second, it invokes the TSA as a global optimizer to regenerate the mapping scheme (lines 21–23). Third, the HRRN dispatches the highest-priority task by assigning it to the VM in the current mapping scheme and updates execution timelines (lines 26–38). Finally, the simulation advances to the next event time (lines 41–42). This ensures global optimization through periodic the TSA execution while maintaining responsiveness via the HRRN dispatch.
This decoupled architecture, comprising two layers, inherently adjusts to dynamic workloads. The HRRN scheduler handles microscopic task queue changes (e.g., arrivals, resolved dependencies) in real time, guaranteeing low latency. In parallel, the TSA module operates as a periodic strategic planner, which re-optimizes the global task to the VM mapping by processing a current system snapshot of all ready tasks and available resources.
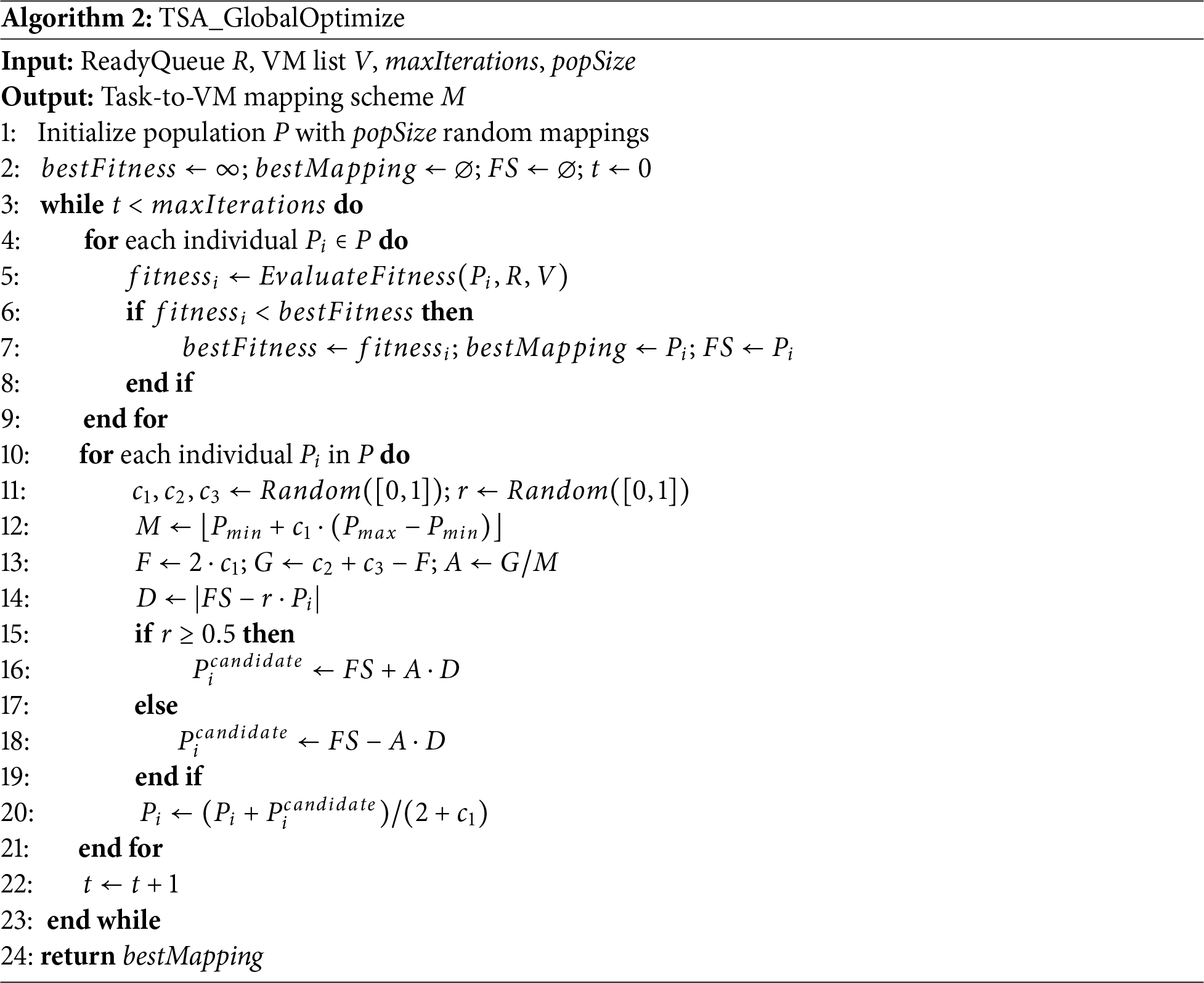
Algorithm 2 presents the TSA global optimization procedure. The algorithm initializes a population of candidate task-to-VM mappings and iteratively refines them by emulating tunicate swarm behavior. Solutions are evaluated by the fitness function (Eq. (2)). Algorithm 2 adjusts each individual’s position based on conflict avoidance, movement towards the best neighbor, and swarm intelligence. It returns the solution with the minimized cost while satisfying the SLA requirements.
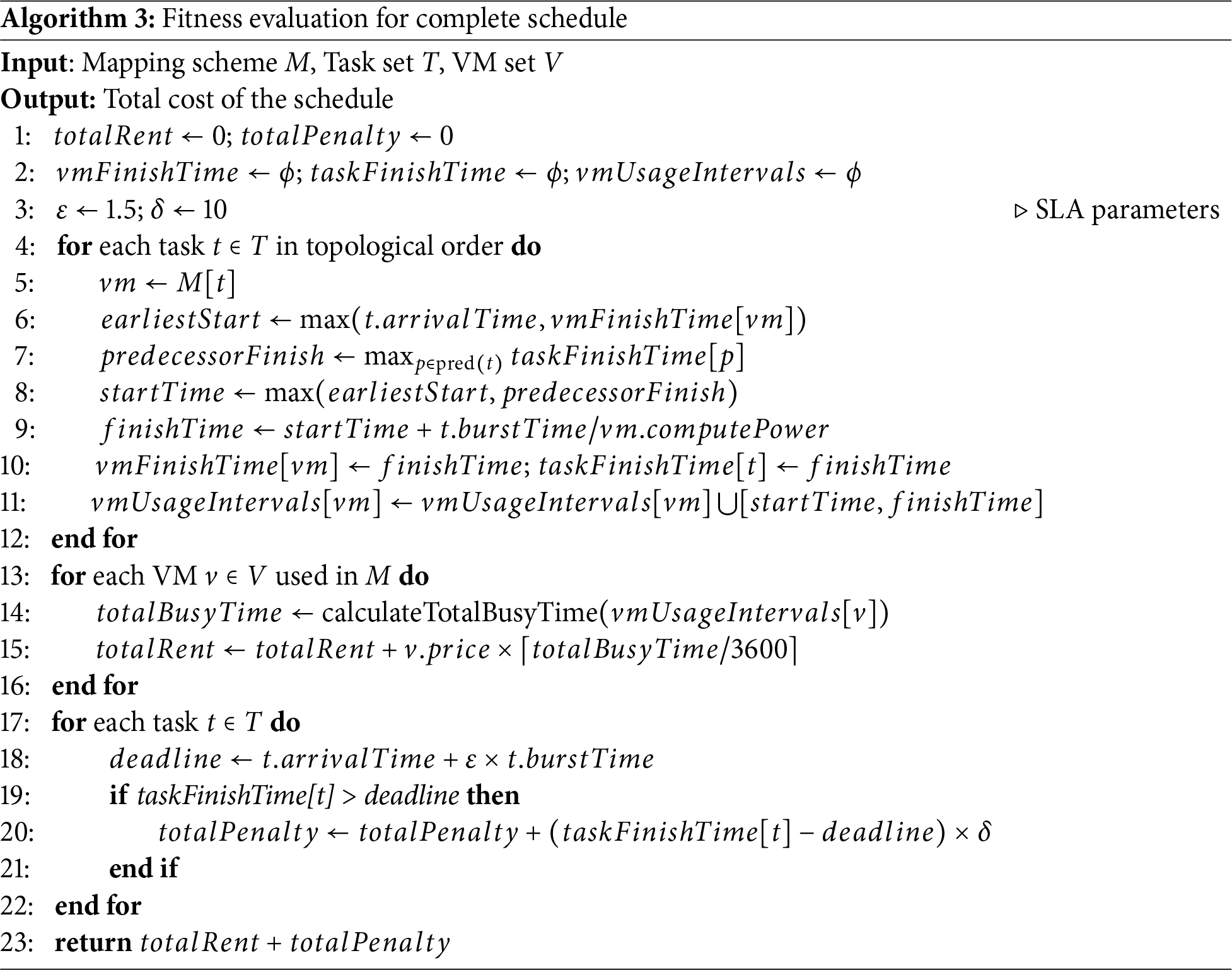
Algorithm 3 defines the fitness assessment for complete scheduling solutions. It simulates task execution under a given mapping scheme while respecting task dependencies. The function processes tasks in topological order, calculates VM busy intervals, aggregates rental costs based on actual usage, and sums deadline violation penalties using predefined SLA parameters. The final fitness value represents the combined cost of resource consumption and SLA violations.
5.1 Experimental Environment Configuration
The experiments are conducted on a Windows 10 machine. Algorithms are implemented in Java (JDK 1.8) and are executed. Custom Java modules for task queue management, the VM modeling, and scheduling control are developed for simulation.
5.2 Experimental Setup and Parameter Settings
VM datasets: The VM datasets are sourced from
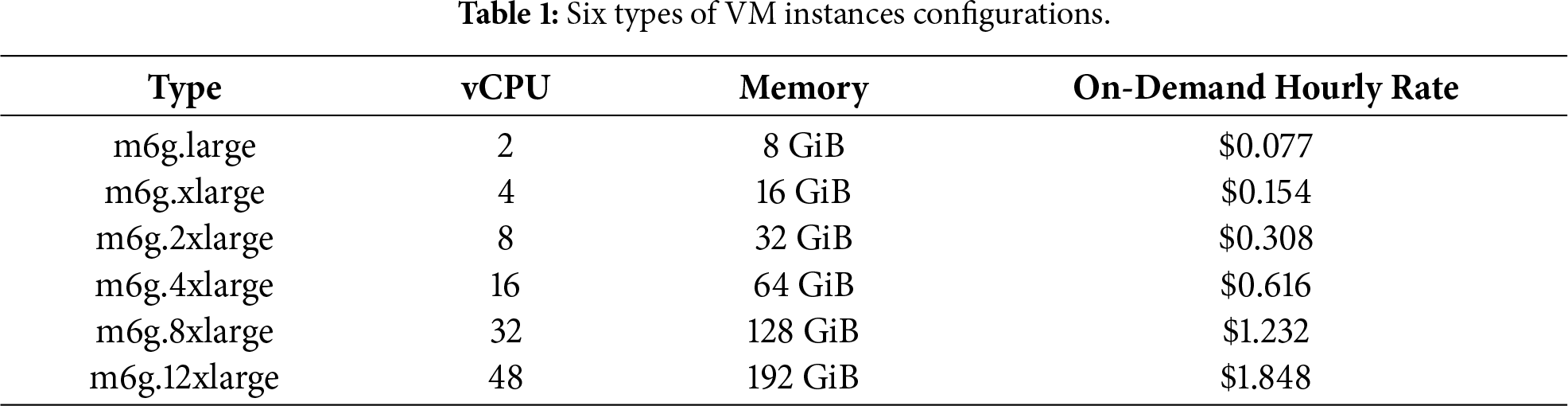
Workflow datasets: Our evaluation uses mixed workflow scenarios to simulate cloud resource competition, integrating four scientific workflows (CyberShake, Inspiral, Montage, Sipht [24]) with distinct structures into three concurrent testing scenarios: Scenario S (30 tasks CyberShake + 30 tasks Montage), Scenario M (50 tasks Inspiral + 50 tasks Sipht), and Scenario L (staggered arrivals of 100 tasks CyberShake, 50 tasks Montage, and 30 tasks Inspiral). This design tests scheduler performance under heterogeneous, dynamic loads, with a consistent $0.24 per hour deadline penalty and system level performance evaluation.
Baseline algorithms: We evaluate the proposed TS-HRRN method against six scheduling algorithms to ensure a comprehensive comparison. This includes the standalone HRRN and TSA schedulers, which serve as baseline components to demonstrate the performance improvement achieved by their integration in our hybrid method. We also compare against four state of the art schedulers: Deadline aware and Cost effective Hybrid Genetic Task Scheduling (DCHG-TS) [21], Ant Colony Optimization (ACO) [22], the Cost Effective Firefly based Algorithm (CEFA) [23], and a Genetic Algorithm with Deep Reinforcement Learning (GA-DRL) [9]. This selection enables a thorough performance assessment across heuristic, metaheuristic, and learning based algorithmic paradigms.
To ensure a fair comparison, hyperparameters are configured as follows. Population-based algorithms (standalone TSA, the TS-HRRN, the ACO, the CEFA, the DCHG-TS, and the GA-DRL) used a population size of
5.3 Comparison of Algorithm Costs under Different SLA Relaxation Coefficients
Table 2 reports the cost of the HRRN, the TSA, the ACO, the CEFA, the DCHG-TS, the GA-DRL and our proposed TS-HRRN across combinations of relaxation coefficient and workflow instance scale (Scenario S: 30 CyberShake + 30 Montage, Scenario M: 50 Inspiral + 50 Sipht, Scenario L: 100 CyberShake + 50 Montage + 30 Inspiral). <1.00, S> denotes
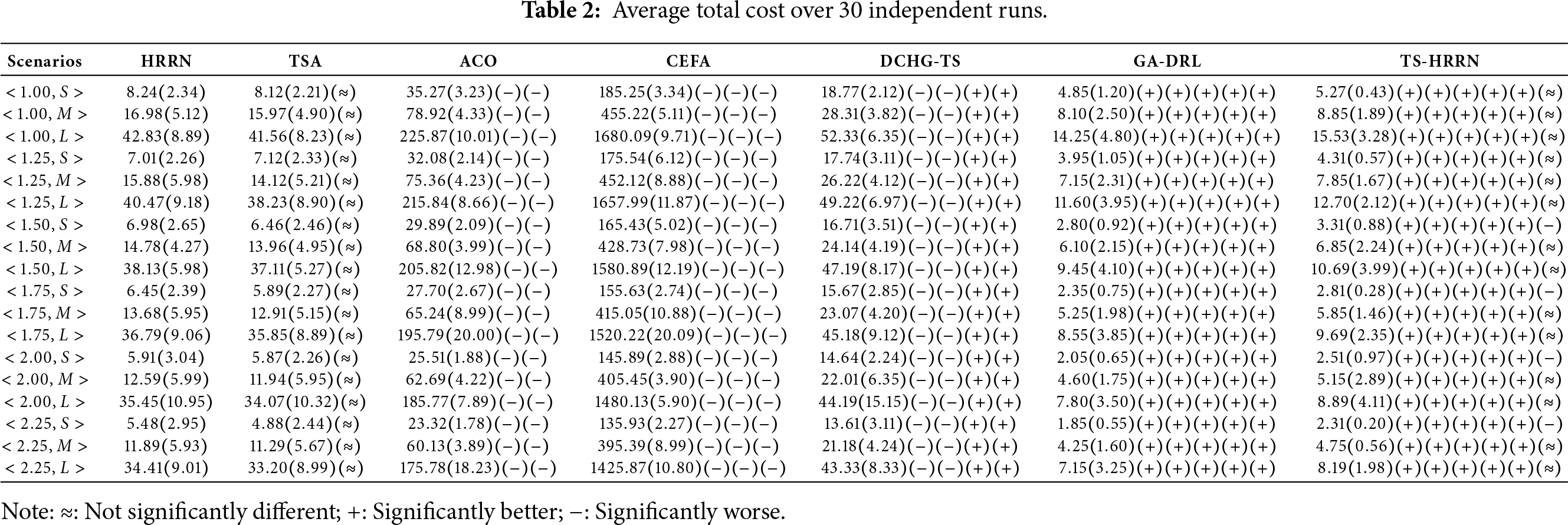
Results show that the TS-HRRN outperforms its standalone components (the HRRN and the TSA). For example, in scenario
The overall cost comparison across all algorithms and scenarios is synthesized in Fig. 2. A key observation is that TS-HRRN uniquely employs an adaptive strategy: it strictly adheres to deadlines when
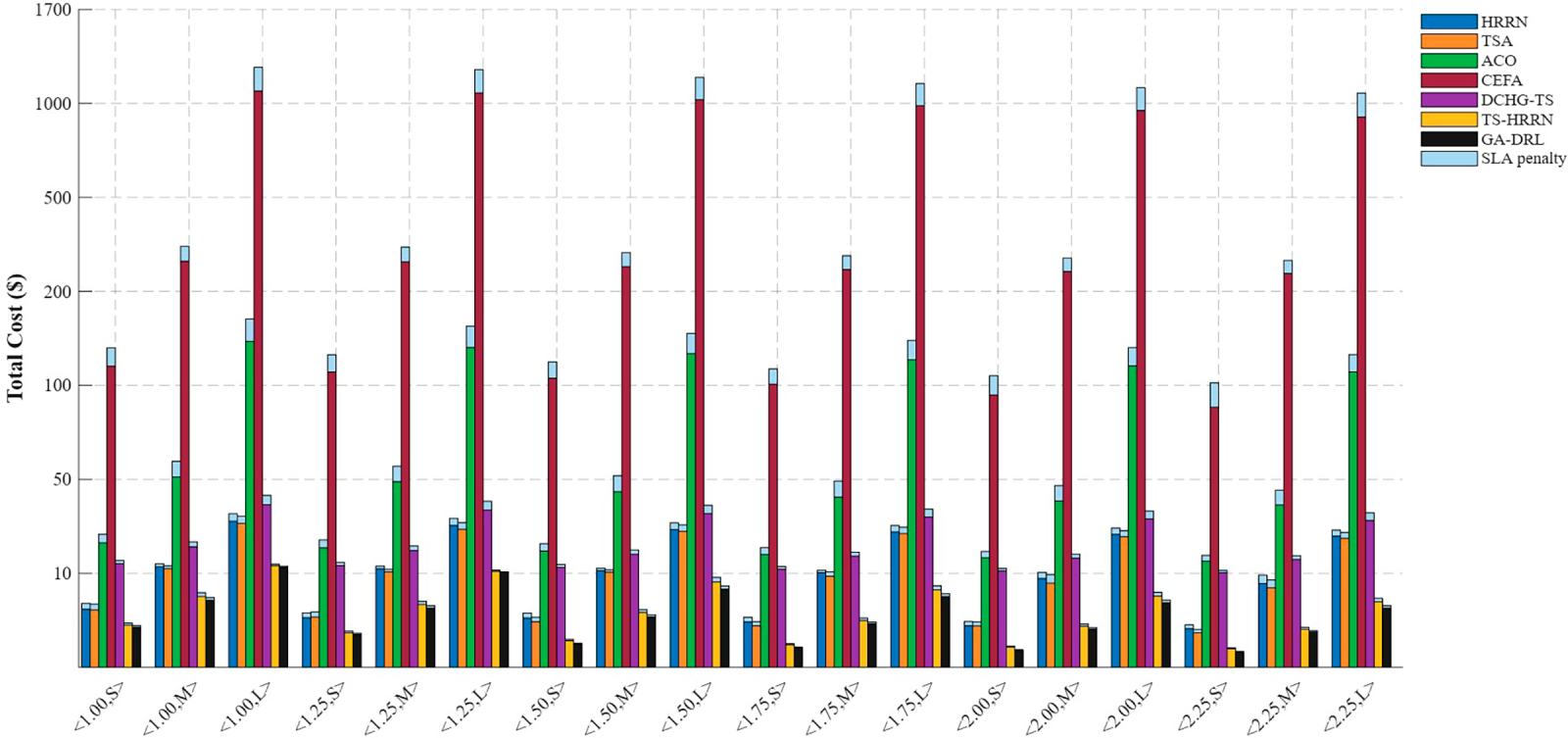
Figure 2: The average of VM fees and SLA penalties of all algorithms.
5.4 Comparative Performance Analysis
Performance Evaluation of TS-HRRN Compared to Other Algorithms
We evaluate the TS-HRRN against its component algorithms and state-of-the-art methods, including the GA-DRL, across three mixed workflow scenarios using the consistent parameter settings detailed in Section 5.2.2.
Fig. 3 shows execution efficiency and turnaround time. The results confirm that integrating the HRRN (for fast dispatch) with the TSA (for global cost optimization) gives the TS-HRRN balanced performance across all metrics. Notably, the TS-HRRN achieves this with approximately three times lower scheduling overhead than the GA-DRL method, demonstrating greater practical efficiency. Consistent gains across scenarios (S, M, L) validate the robustness and adaptability of our approach. Consequently, the method capably handles both transient and macroscopic workload dynamics.
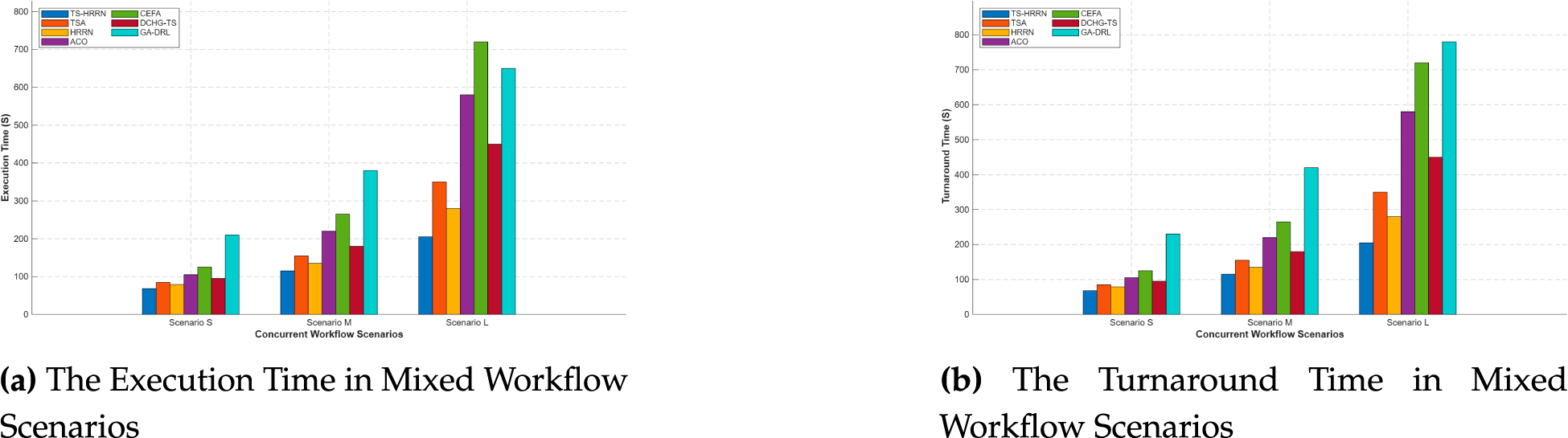
Figure 3: Performance comparison in mixed workflow scenarios.
This paper proposes the TS-HRRN, a workflow scheduling method that synergistically combines the TSA with the HRRN policy. Our approach effectively minimizes the rental cost and the SLA penalties for heterogeneous workflows. Extensive evaluation demonstrates that the TS-HRRN reduces the cost by up to 94.8% against meta-heuristic baselines. It also achieves competitive cost-efficiency compared to a learning-based method, while offering superior operational simplicity and stability, confirming its practical value and excellent scalability. In the future, we will deploy the proposed method in fully dynamic cloud settings with auto-scaling and stochastic arrivals. We also plan to extend it to the cloud-edge environment and investigate integration with multi-objective optimization.
Acknowledgement: Not applicable.
Funding Statement: This research was supported by the National Natural Science Foundation of China under Grant 62472264, and the Natural Science Distinguished Youth Foundation of Shandong Province under Grant ZR2025QA13.
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, methodology and writing, Yujie Tian; supervision and project administration, Jing Li; formal analysis, Ming Zhu; review and editing, Cong Liu; data curation, Ziyang Zhang. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the Corresponding Author, Jing Li, upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Yang Y, Chen G, Ma H, Zhang M. Dual-tree genetic programming for deadline-constrained dynamic workflow scheduling in cloud. In: Service-oriented computing. Cham, Switzerland: Springer Nature; 2022. p. 433–48. doi: 10.1007/978-3-031-20984-0_31. [Google Scholar] [CrossRef]
2. Versluis L, Iosup A. A survey of domains in workflow scheduling in computing infrastructures: community and keyword analysis, emerging trends, and taxonomies. Future Gener Comput Syst. 2021;123(2011):156–77. doi:10.1016/j.future.2021.04.009. [Google Scholar] [CrossRef]
3. Chen W, Deelman E. WorkflowSim: a toolkit for simulating scientific workflows in distributed environments. In: Proceedings of the 2012 IEEE 8th International Conference on E-Science; 2012 Oct 8–12; Chicago, IL, USA. p. 1–8. [Google Scholar]
4. Fard HM, Prodan R, Fahringer T. Multi-objective list scheduling of workflow applications in distributed computing infrastructures. J Parallel Distribut Comput. 2014;74(3):2152–65. doi:10.1016/j.jpdc.2013.12.004. [Google Scholar] [CrossRef]
5. Mikram H, El Kafhali S, Saadi Y. HEPGA: a new effective hybrid algorithm for scientific workflow scheduling in cloud computing environment. Simul Model Pract Theory. 2024;130(1):102864. doi:10.1016/j.simpat.2023.102864. [Google Scholar] [CrossRef]
6. Arabnejad V, Bubendorfer K, Ng B. Dynamic multi-workflow scheduling: a deadline and cost-aware approach for commercial clouds. Future Gener Comput Syst. 2019;100(1):98–108. doi:10.1016/j.future.2019.04.029. [Google Scholar] [CrossRef]
7. Wang ZJ, Zhan ZH, Yu WJ, Lin Y, Zhang J, Gu TL, et al. Dynamic group learning distributed particle swarm optimization for large-scale optimization and its application in cloud workflow scheduling. IEEE Trans Cybern. 2019;50(6):2715–29. doi:10.1109/tcyb.2019.2933499. [Google Scholar] [CrossRef]
8. Yang Y, Chen G, Ma H, Zhang M, Huang V. Budget and SLA aware dynamic workflow scheduling in cloud computing with heterogeneous resources. In: Proceedings of the 2021 IEEE Congress on Evolutionary Computation (CEC); 2021 Jun 28–Jul 1; Kraków, Poland. [Google Scholar]
9. Zhang J, Cheng L, Liu C, Zhao Z, Mao Y. Cost-aware scheduling systems for real-time workflows in cloud: an approach based on genetic algorithm and deep reinforcement learning. Expert Syst Appl. 2023;234(1):120972. doi:10.1016/j.eswa.2023.120972. [Google Scholar] [CrossRef]
10. Dong T, Xue F, Xiao C, Zhang J. Workflow scheduling based on deep reinforcement learning in the cloud environment. J Ambient Intell Humaniz Comput. 2021;12(12):1–13. doi:10.1007/s12652-020-02884-1. [Google Scholar] [CrossRef]
11. Faragardi HR, Saleh Sedghpour MR, Fazliahmadi S, Fahringer T, Rasouli N. GRP-HEFT: a budget-constrained resource provisioning scheme for workflow scheduling in IaaS clouds. IEEE Trans Parallel Distrib Syst. 2020;31(6):1239–54. doi:10.1109/tpds.2019.2961098. [Google Scholar] [CrossRef]
12. Ismayilov G, Topcuoglu HR. Neural network based multi-objective evolutionary algorithm for dynamic workflow scheduling in cloud computing. Future Gener Comput Syst. 2020;102(5):307–22. doi:10.1016/j.future.2019.08.012. [Google Scholar] [CrossRef]
13. Sanodiya RK, Sharma S, Sharma V. A highest response ratio next (HRRN) algorithm based load balancing policy for cloud computing. Int J Comput Sci Trends Technol. 2013;3(1):72–6. [Google Scholar]
14. Rimal BP, Maier M. Workflow scheduling in multi-tenant cloud computing environments. IEEE Trans Parallel Distribut Syst. 2016;28(1):290–304. doi:10.1109/tpds.2016.2556668. [Google Scholar] [CrossRef]
15. Ahmed S, Omara FA. An enhanced workflow scheduling algorithm for cloud computing environment. Int J Intell Eng Syst. 2022;15(6):627–46. doi:10.22266/ijies2022.1231.56. [Google Scholar] [CrossRef]
16. Djigal H, Feng J, Lu J, Ge J. IPPTS: an efficient algorithm for scientific workflow scheduling in heterogeneous computing systems. IEEE Trans Parallel Distrib Syst. 2021;32(5):1057–71. doi:10.1109/tpds.2020.3041829. [Google Scholar] [CrossRef]
17. Sun F, Cao J, Lu Z. HEFT-dynamic scheduling algorithm in workflow scheduling. In: Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC); 2022 Aug 15–17; Hefei, China. p. 4885–90. [Google Scholar]
18. Chen K, Wang Y, Zhang L, Xie G. A deadline-constrained and cost-minimized approach for workflow scheduling in IaaS clouds. In: Proceedings of the 2022 IEEE 6th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC); 2022 Oct 3–5; Beijing, China. p. 1080–5. [Google Scholar]
19. Mohammadzadeh A, Masdari M. Scientific workflow scheduling in multi-cloud computing using a hybrid multi-objective optimization algorithm. J Ambient Intell Humaniz Comput. 2023;14(4):3509–29. doi:10.1007/s12652-021-03482-5. [Google Scholar] [CrossRef]
20. Zeedan M, Attiya G, El-Fishawy N. Enhanced hybrid multi-objective workflow scheduling approach based on artificial bee colony in cloud computing. Computing. 2023;105(1):217–47. doi:10.1007/s00607-022-01116-y. [Google Scholar] [CrossRef]
21. Iranmanesh A, Naji HR. DCHG-TS: a deadline-constrained and cost-effective hybrid genetic algorithm for scientific workflow scheduling in cloud computing. Cluster Comput. 2021;24(2):667–81. doi:10.1007/s10586-020-03145-8. [Google Scholar] [CrossRef]
22. Varshney S, Srivastava GMS. Efficient workflow scheduling in fog-cloud environments using ant colony optimization. In: Proceedings of the 2024 Second International Conference on Data Science and Information System (ICDSIS); 2024 May 17–18; Hassan, India. p. 1–5. [Google Scholar]
23. Chakravarthi K, Shyamala L, Vaidehi V. Cost-effective workflow scheduling approach on cloud under deadline constraint using firefly algorithm. Appl Intell. 2021;51(3):1629–44. doi:10.1007/s10489-020-01875-1. [Google Scholar] [CrossRef]
24. Juve G, Chervenak A, Deelman E, Bharathi S, Mehta G, Vahi K. Characterizing and profiling scientific workflows. Future Gener Comput Syst. 2013;29(3):682–92. doi:10.1016/j.future.2012.08.015. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools