
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

A Survey of Hybrid Energy-Aware and Decentralized Game-Theoretic Approaches in Intelligent Multi-Robot Task Allocation
1 Department of Mathematical and Statistical Sciences, University of Alberta, Edmonton, AB, Canada
2 Department of Mathematics, Bahçeşehir University, Beşiktaş/İstanbul, Türkiye
3 Libyan Authority for Scientific Research, Tripoli, Libya
4 Libyan International Medical University, Benghazi, Libya
5 Informatics Institute, Istanbul Technical University, Sarıyer/İstanbul, Türkiye
6 Department of Computer Engineering, Bahçeşehir University, Beşiktaş/İstanbul, Türkiye
7 Department of Electronics and Communications Engineering, Istanbul Technical University, Sarıyer/İstanbul, Türkiye
8 Department of Computer Science and Mathematics, Lebanese American University, Beirut, Lebanon
* Corresponding Author: Seifedine Kadry. Email:
Computers, Materials & Continua 2026, 87(3), 5 https://doi.org/10.32604/cmc.2026.077060
Received 01 December 2025; Accepted 27 February 2026; Issue published 09 April 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Multi-Robot Task Allocation (MRTA) has proven its importance in the current and near-future era, wherein in every aspect of life, there will be robots to handle tasks effectively and efficiently. While there has been a growing interest in MRTA problems in the robotics industry, the question arises of how to make robots more decentralized and intelligent through rational decision-makers rather than ones that are centralized and filled with black boxes. This survey aims to address that question by examining recent MRTA literature and exploring topics including MRTA taxonomy, centralized and decentralized controls, static and dynamic allocation strategies, heterogeneity and coalition formations, energy harvesting, game theory, and hybrid MRTA strategies for intelligent task management and decision-making. The main motivation of this survey is to establish a unique understanding of intelligent MRTA by comparing the existing literature through diverse MRTA perspectives. In this regard, we perform a comprehensive analysis of the recent MRTA papers and provide relative discussions in each section. With this survey, we try to pose several open problems and research directions regarding how MRTA evolves when there is a limited energy source or harvesting, how decentralized MRTA mechanisms are involved in robot intelligent decision-making, and how hybrid, learning-based game-theoretical models ease MRTA problems in real-time and on a large scale. Furthermore, this survey also aims to examine the possibility of integrating game theory-based MRTA methodologies including Nash, Stackelberg, and coalition games with hybrid multi-objective optimization methods. Based on the steps taken, this study collects various pieces of information from the literature to form a cohesive MRTA survey. Hence, the shortcomings of existing methods can be identified so that potential research directions can be outlined, particularly research related to energy-efficient, decentralized autonomous MRTA using game theory concepts.Keywords
The increasing demand for autonomous systems in various environments and the rapid advancement of robotics have become the main reasons for allocating tasks in multi-robot systems. This makes task allocation in multi-robot systems one of the vital research topics in modern robotics. MRTA faces various challenges, especially in allocating tasks effectively to diverse groups of robots. In today’s real world, this field is very important and has the potential to continue to develop, including in the areas of communication, environmental uncertainty, and varying robot capabilities. In addition, MRTA must also be aligned with the main objectives. One of the main objectives is to minimize task completion time, reduce energy consumption, maximize coverage, and ensure that resource use is fair. In solving problems in autonomous systems, the presence of robots that can perform optimal task allocation work is very necessary. In addition, the ability of robots to coordinate and identify gaps in the capabilities of each robot is also very important. This has a positive influence on strategies so that efficiency in task allocation is achieved, especially in task allocation in the fields of surveillance, environmental monitoring, search and rescue, automated warehouse control, agriculture, and disaster response [1,2]. To achieve efficiency, several robots with different expertise are needed, so that good coordination techniques are very necessary, so that the tasks carried out run while minimizing interference [3]. Based on this, the MRTA problem is a complex problem because it involves many important components and requires high computational capabilities.
In cases where robots are assigned tasks that require autonomous energy harvesting, task allocation becomes a more challenging problem. This is because each robot relies on energy sources such as wind turbines, kinetic energy harvesters, and solar panels to operate. During MRTA, robots also maintain control over their energy consumption. Using traditional MRTA strategies, this problem is difficult or even impossible to solve, especially when working in a more dynamic environment with energy-limited platforms. This problem has begun to be solved with the development of energy harvesting techniques. Energy harvesting techniques consist of several steps. The first step is that robots must be able to determine an energy recharge schedule and must improve collaboration within the team in order to exchange energy or energy sources. The second step is that the robot must be able to determine the optimal path when harvesting energy. However, this second step requires various energy harvesting scenarios [4]. Thus, optimal task allocation can be achieved if a comprehensive analysis of energy efficiency is carried out, taking into account the appropriate optimization method [5].
In the development of MRTA, task allocation strategies are classified into two main parts, namely traditional MRTA, often referred to as centralized MRTA, and decentralized MRTA. Centralized MRTA operates by placing the focus on a single robot that acts as a controller or planner. The robot as the center must have the ability to adapt to dynamic environments, so that task allocation is more energy-efficient and saves operational costs through situation-aware decision-making [6]. Centralized MRTA is well-suited to be applied in controlled environments with little uncertainty, but is less effective when involving many robots, especially if the environmental situation is dynamic and uncertain. Meanwhile, in decentralized MRTA, each robot is given the ability to make decisions based on the situation it sees and interactions with other robots. This decentralized system introduces a robot team formation algorithm to increase task effectiveness, overcoming the weaknesses of existing methods [7]. Technically, this method is very good because the system becomes more stable and adaptive, especially when working in a large environment with uncertain conditions. As explained previously, task allocation will be maximized if the robot is able to collect energy independently. By integrating the decentralized model with game theory, each robot has the ability to collect energy.
During the development of MRTA, game theory emerged as a field contributing to modeling and analyzing decision-making processes, particularly in multi-agent systems. Models incorporating game theory can align the goals of each robot with a common goal. With aligned goals, robots will easily cooperate even though they will make decisions individually. In MRTA, game theory is used as a model to describe interactions between robots. The interactions that occur are viewed as a strategy-based game in which robots have the choice to compete or cooperate to optimally divide tasks. In the implementation process, the type of game theory used must be appropriate to the situation between the robots. When robots have conflicting goals, non-cooperative game theory models, such as the Nash Equilibrium, are highly relevant. Meanwhile, when robots have the same goal, the use of cooperative game theory, such as coalition formation, is highly relevant. This indicates that they need to cooperate to improve their overall performance. The use of game theory methods assists robots in task allocation. With optimal task allocation, robots can perform work efficiently while still paying attention to energy consumption and overall system performance.
Recent literature supports merging decentralized approaches with a game theory model to improve task allocation in energy harvesting networks [8]. First, this combination enables robots to choose based on the energy or resource availability in the area. This kind of giving tasks can help the robot save energy and last longer during its journey. On the other hand, game theory models directly applied to robotic pursuit–evasion scenarios, such as autonomous drones or mobile robots performing interception, tracking, or collision avoidance on planar environments [9]. In addition, game theory models can also assist the design of decision-making and motion-planning strategies in adversarial and cooperative robotic settings [10]. Consequently, these models possess the potential to be expanded to incorporate more complex interactions, including dynamic robot charging schedules, energy sharing among robots, or collaborative efforts in task completion. This part is crucial for putting into action energy-aware multi-robot task allocation methods [11,12].
This survey is designed to move beyond classical MRTA taxonomies and to provide a unified and forward-looking synthesis of recent developments in MRTA. Rather than organizing the literature solely around architectural or temporal distinctions, this work explicitly examines how MRTA models have evolved from centralized formulations toward decentralized, intelligent, and game-theoretic frameworks operating under increasingly severe energy constraints. More precisely, this survey addresses the following three main research questions MRTA literature:
1. How should task allocation strategies be redesigned when robots must operate under limited, harvested, or dynamically replenished energy?
2. How do decentralized and consensus-based MRTA mechanisms interact with strategic behavior, incentives, and cooperation?
3. How can hybrid, learning-based, and game-theoretic models be integrated to support real-time, large-scale, and persistent multi-robot systems?
To answer them, the survey provides a comprehensive and comparative analysis of recent MRTA research across energy harvesting, centralized and decentralized algorithms, static and dynamic strategies, and hybrid and intelligent models, together with game theory-oriented approaches. By structuring the literature around the co-evolution of energy awareness, decentralization, and strategic coordination, this work establishes an integrated perspective that is largely absent from existing MRTA surveys.
Fig. 1 shows the simple flowchart of this survey. Here, we talk about how to go from basic ideas to a more complicated MRTA coordination strategy. In the first part, we do a basic analysis of MRTA by defining the problem, looking at the challenges that are already there, and considering various schemes, including control, energy, and game theory. This section establishes key perspectives and directions. This is to better classify and compare the old taxonomy with the new one. The comparison covers the coordination and architectural trade-offs between centralized, decentralized, and hybrid control models. We show that elements of adaptability and real-time coordination can illustrate the importance of the shift from rigid assignments to flexible, learning-based assignments. Furthermore, the multi-agent cooperation layer is discussed as it addresses variations in sensors, computational processes, and energy availability. This discussion is conducted by analyzing a coalition-based game theory model and analyzing the communication processes between layers. A good layer can accumulate energy, increasing mobility. Furthermore, the layer is also capable of integrating control, communication, and energy availability within the environment, as well as supporting edge, internet of things (IoT), and artificial intelligence (AI). Based on this, this study analyzes the game theory framework, human-robot interactions, and energy-efficient team game mechanisms. Energy-efficient team games are reviewed from the perspective of strategic and rational coordination levels that focus on constraints and hybrid learning-based game approaches. Furthermore, the learning methodology and trade-offs that occur in multi-criteria optimization indicate challenges and research gaps. This will benefit future MRTA systems. Thus, this survey connects sustainable autonomy, coordination intelligence, and energy efficiency to next-generation multi-robot systems, as shown in Fig. 1.
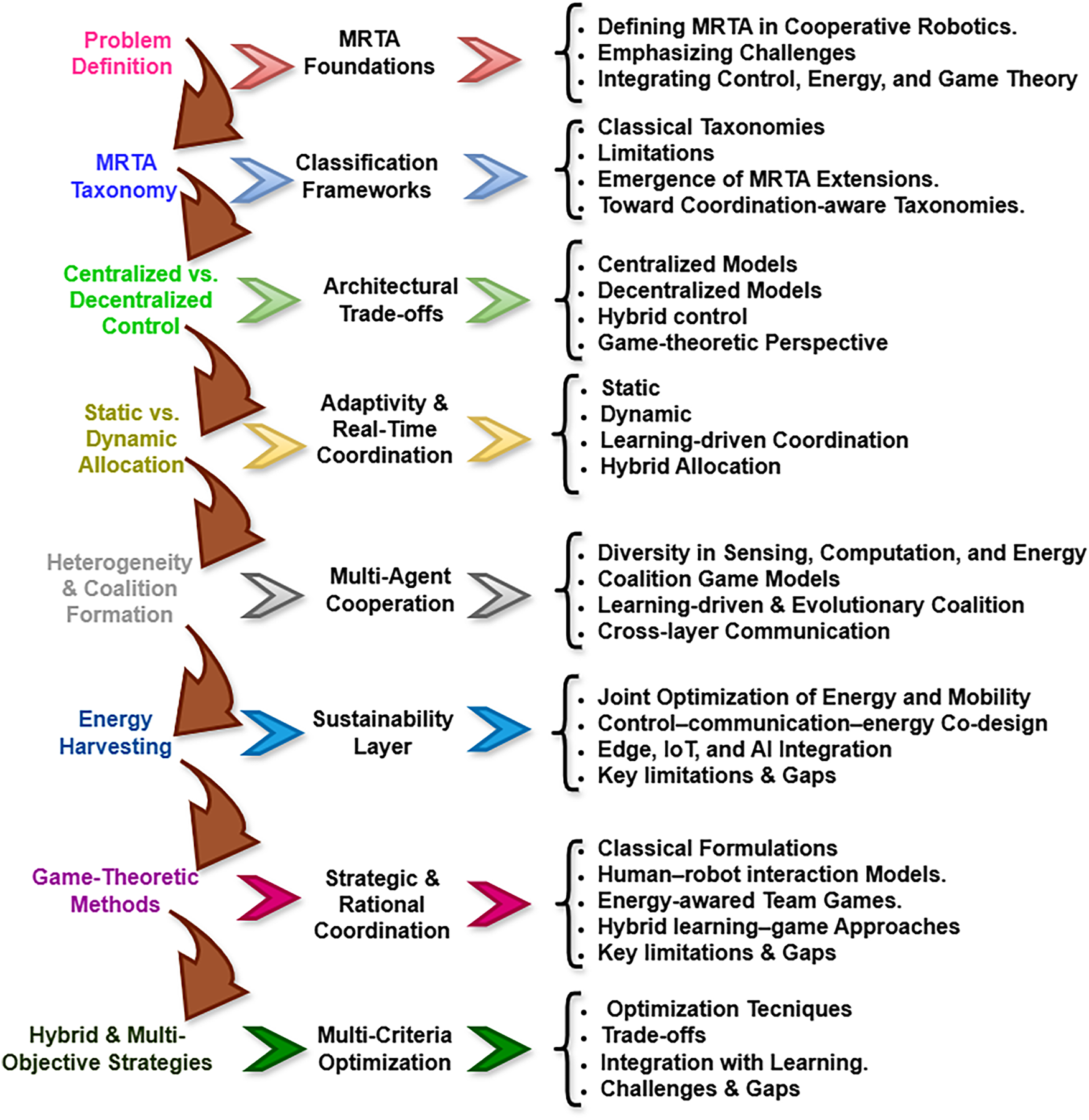
Figure 1: Overview of the survey structure and thematic organization of MRTA research.
This survey is constructed in such a way as to provide a basis for a full evaluation. The evaluation focused on the most recent advancements in MRTA in different directions. This survey is organized as follows:
• This paper provides a comprehensive analysis of the latest MRTA papers on energy harvesting, centralized and decentralized MRTA algorithms, static and dynamic MRTA strategies, hybrid and intelligent models in MRTA, and game theory-oriented algorithms in MRTA. In addition, changes in MRTA models over time are also discussed, from centralized MRTA models to decentralized MRTA models that use new game theory. Then, a detailed discussion is also carried out regarding the improvement of the model’s ability to solve MRTA problems in environments with limited energy.
• In this survey, existing MRTA methods will be compared and combined, including decentralized consensus MRTA methods, dynamic vs. static models, models with game theory-based strategies, machine learning-based models, and hybrid MRTA models.
• In addition to comparing and discussing methods in depth, this survey also conducted analyses, including an analysis of existing research gaps, methodological limitations, and projections for future MRTA research.
This section consists of four main stages: identification, screening, eligibility assessment, and final inclusion. In this context, we examine these stages to outline the review methodology and explain how the survey is structured and organized.
The identification stage comprises three primary review steps: literature search, time span determination, and the inclusion and exclusion criteria for the literature relevant to the review investigation.
This review contains relevant studies, which are collected from major scientific databases, including Web of Science, Scopus, IEEE Xplore, ScienceDirect, ACM and Google Scholar. Here, we search the literature by using certain combinations of key words including MRTA, MRTA taxomony, energy harvesting in robot task assignment, distributed robot coordination, static MRTA, dynamic MRTA, centralized and decentralized control in MRTA, swarm MRTA, hybrid and multi-objective schemes in MRTA, coalition formation, market-based MRTA, game theoretical frameworks in MRTA, AI applications in MRTA and energy-aware multi-robot systems. Boolean operators and database-specific filters are performed to refine the results, in addition to backward and forward reference searches to identify further relevant studies. Through this process, approximately 524 records are identified from online database searches and 61 additional records are obtained through manual searches of references and related surveys.
The review covers mostly publications from 2021 to 2025, capturing both foundational MRTA formulations and recent advances in learning-driven, energy-aware, and game-theoretic task allocation.
Studies are included if they: (i) explicitly addressed MRTA or closely related multi-robot task allocation problems; (ii) proposed models, algorithms, coordination frameworks, or system architectures; and (iii) are published in peer-reviewed journals or major international conference proceedings. Studies are excluded if they: (i) focused exclusively on single-robot systems; (ii) mentioned MRTA only marginally; (iii) lacked technical or methodological contributions; or (iv) are non-peer-reviewed or non-English publications.
All retrieved records are merged and duplicate entries were removed using automated and manual checks. After duplicate removal, 344 unique records remained. Titles and abstracts are first screened for relevance, which result in the exclusion of studies that are clearly outside the scope of MRTA. The remaining papers proceed to full-text assessment.
Based on title and abstract screening, 222 articles are retained for full-text evaluation. These articles are carefully examined to assess methodological relevance, technical contribution, and alignment with the scope of this survey. At this stage, 71 papers are excluded due to marginal relevance, insufficient technical depth, or substantial overlap with other works.
Following the eligibility assessment, a final set of 151 studies is included in the qualitative synthesis. This final corpus is systematically organized according to the conceptual flow of this survey: MRTA foundations and problem definitions; classification and taxonomy frameworks; centralized, decentralized, and hybrid architectures; static vs. dynamic and real-time allocation; heterogeneity, cooperation, and coalition formation; sustainability and energy-aware MRTA; game-theoretic and strategic coordination; and hybrid and multi-objective optimization strategies. This taxonomy directly guides the structure of the review and the comparative synthesis across sections.
A reversed-triangle flow diagram summarizing the identification, screening, eligibility, and inclusion process is provided in Fig. 2.
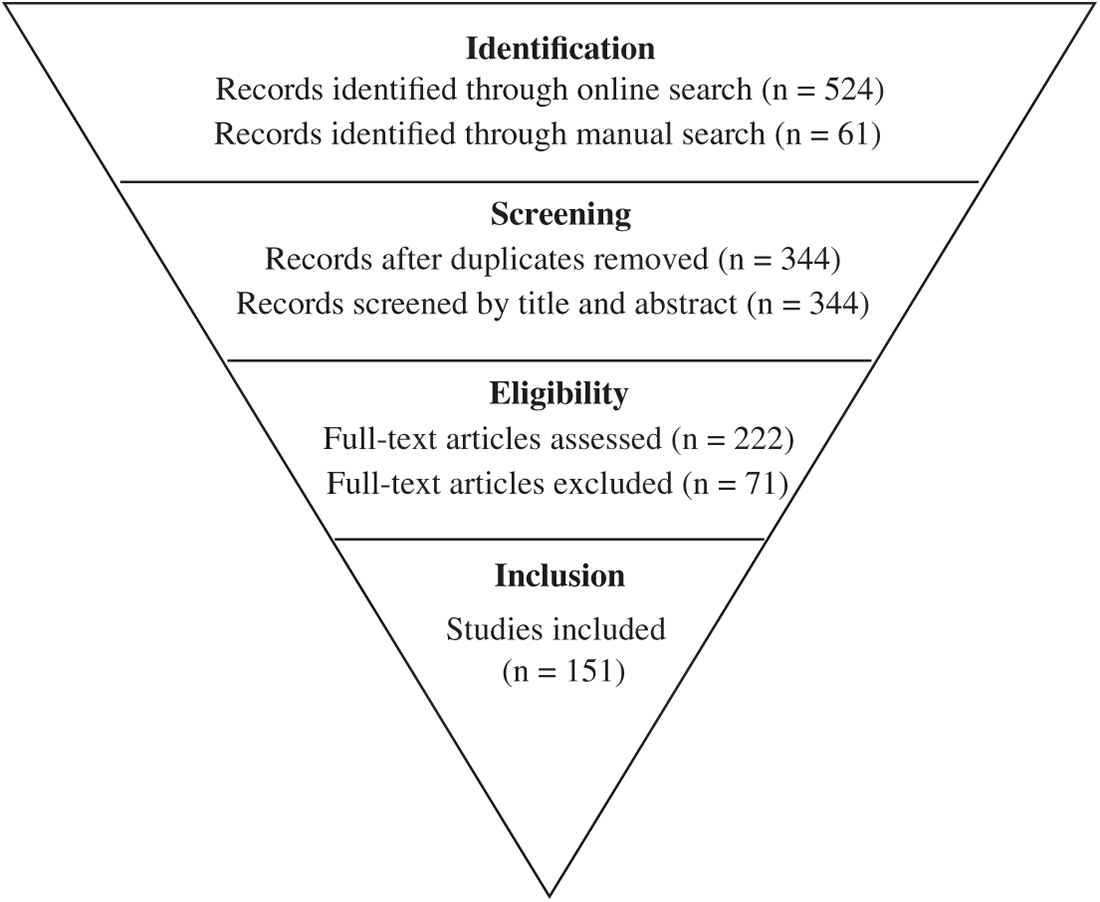
Figure 2: An illustration of a reversed triangle depicting the sequential process of literature identification, screening, eligibility assessment, and inclusion for the MRTA survey.
Taxonomy in MRTA is a framework that serves to classify various approaches that can be taken in multi-robot or multi-agent systems. To understand the existing classifications, one must first understand the basis for their development. The existence of a framework through this taxonomy can help the interaction and task completion of robots. Research on MRTA begins with an analysis of the heterogeneity of robot capabilities, which becomes the basis for adjusting the types of tasks to be assigned to robots. In the following sections, we provide more detailed discussions about its diversity, limitations, extensions, and open challenges.
Korsah et al. [13] have laid a systematic foundation for MRTA research by formulating a detailed taxonomy that divides MRTA problems into three main dimensions:
• Single-task vs. multi-task robots (ST vs. MT),
• Single-robot vs. multi-robot tasks (SR vs. MR), and
• Instantaneous vs. time-extended assignment (IA vs. TA).
This ST-SR-IA conceptual framework has long been the common language for discussing the coordination of different types of missions. However, researchers have realized that this conventional classification is becoming inadequate as the complexity of MRTA systems continues to increase.
3.2 Limitations and Extensions of Classical Models
According to Koubaa et al. [14], conventional taxonomies are insufficient, as they do not include the interactions of robots within various dynamic evolving environments. To address this limitation, they enhance the framework to facilitate cooperative path planning by using constrained resources, distinguishing it from single-robot problems. Similarly, Öztürk and Kuzucuoğlu [15] also suggest a full simulation-based framework in MRTA; rather than considering a static scheme, they tune parameters and adapt the system in real time dynamically, extending static modeling to more functional and dynamic modeling.
3.3 Formal and Configuration-Based Approaches
Several recent studies have contributed to updating the traditional MRTA model to be more integrated and systematic. Miloradović and Papadopoulos [16] formally define the multi-robot multi-task time-extended scheduling problem (MRMT-TEAP) using a configuration-based methodology. On the other hand, Zitouni et al. [17] utilized formal set theory in MRTA and considered the importance of the interplay between task sets and robot capabilities in the problem setup, which supports the integration of hybrid reasoning within the context of MRTA.
3.4 Behavioral and Coordination Foundations
In this context, the literature contributes to behavior-based automated systems [18] and distributed management designs [19]. These two approaches form the theoretical basis for decentralized autonomous decision-making. Literature extends to incentive-based, learning, and collaboration paradigms [20–24]. The study by Arjun et al. [21] highlights challenges in system scalability, heterogeneous robot capabilities, and the integration of ML in auction mechanisms.
3.5 Task-and-Motion Integrated Taxonomies
In this context, one significant advancement is the integration of motion planning with execution reasoning in MRTA. In literature, Wang et al. [25] used traditional methods for separating task allocation and motion planning, but these models are limited in practical applications. Hence, there is a need for establishing task-motion planning methodology within MRTA environments which are more sensitive to system uncertainty.
At a higher level of abstraction, KA and Subramaniam [26] present a systematic review that identifies three main methodological paradigms:
• Optimization-based (e.g., Hungarian, MILP),
• Market-based (e.g., auctions, bidding strategies), and
• Learning-based (e.g., reinforcement and distributed policy learning).
The review discusses the convergence of learning-based and market-based MRTA under energy constraints and uncertainty. In this regard, Xiong et al. [27] proposed price-based probabilistic allocation for UAVs, and showed that deterministic methods are sensitive to noisy environments and fail to capture uncertainties of task utilities. Hence, the study necessitates a transition towards Bayesian and probabilistic reasoning in MRTA problems.
3.7 Hierarchical and Resource-Aware Extensions
Modern taxonomies are being enhanced by integrating communication and learning mechanisms. Arjun et al. [21] propose a hierarchical classification that connects scalability with coalition formation and decentralized learning. Similarly, Wang et al. [28] used a unified taxonomy for task allocation and motion planning, highlighting that decentralized game theory approaches can increase resilience towards approximate equilibria [29,30].
This section discusses open challenges in MRTA taxonomy. Table 1 summarizes the evolution of the main MRTA taxonomy, showing the transition from classical formulations to learning- and coalition-driven frameworks.
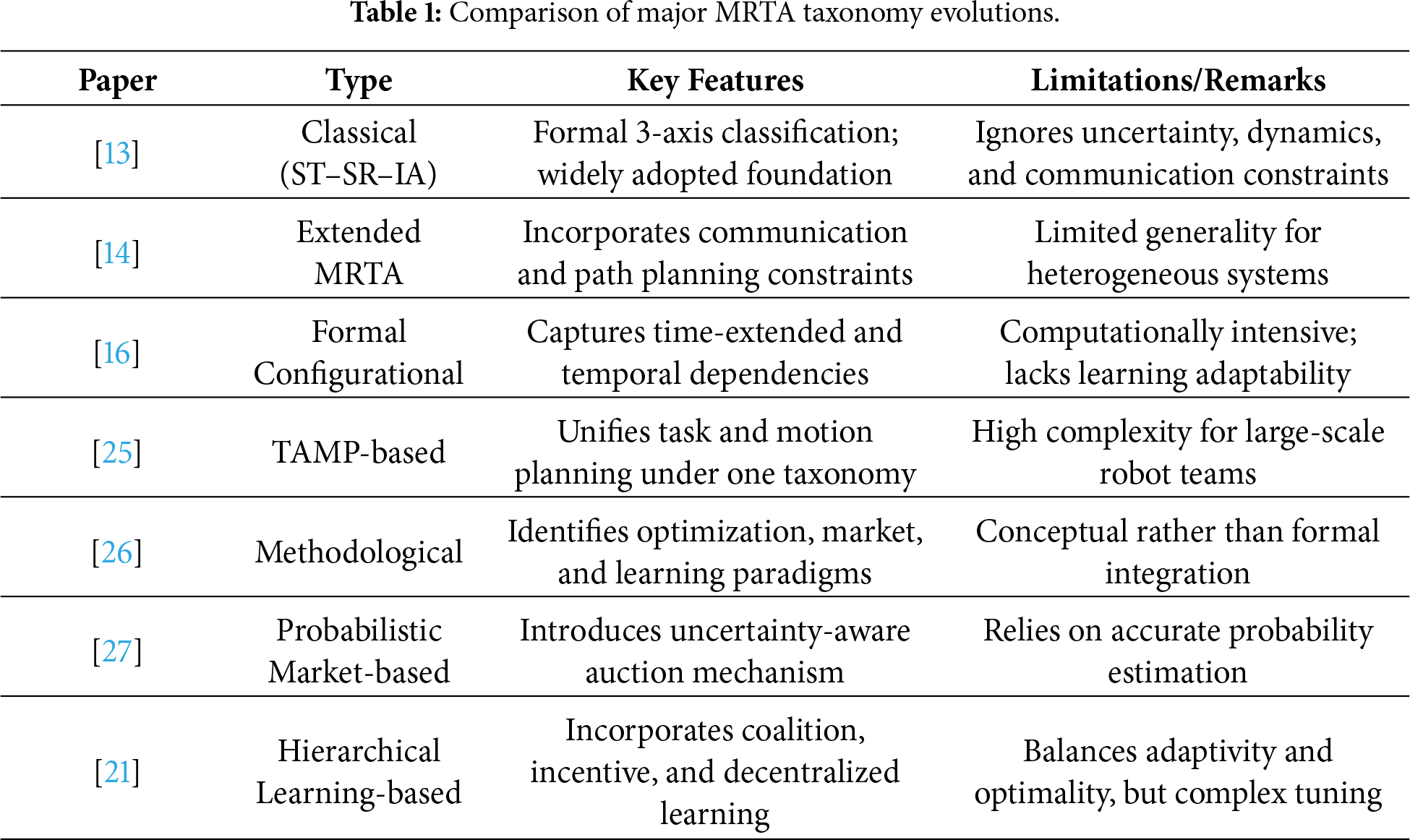
Despite progress, three crucial challenges remain. To address them:
1. Weak interoperability between heterogeneous MRTA taxonomies,
2. Limited scalability under stochastic and incomplete information, and
3. Lack of unified representation for task complexity, robot specialization, and energy consumption.
Future MRTA must be developed through hybrid formalism, combining rigid symbolic language with data-driven flexibility, to achieve a balance between operational realism and theoretical generality.
4 Centralized vs. Decentralized Control
Historical literature in research on control design in MRTA shows that the focus was on the dynamic contrast between universal integration and local autonomy. If the size, variety, and ambiguity of the robot team environment expand, the standard assumption of a single universal planner becomes progressively restricted. Subsequently, there has been a shift to dispersed and hybrid models that spread intelligence among agents while preserving a scale of universal structure. In this section, the discussion will be on the differences between centralized and decentralized control methods in terms of performance, scalability, and structure. Also, this section trails the evolution of both methods from fixed rigid optimization models to learning-based, communicative, and adaptive frameworks that seek to stabilize optimality with autonomy.
In MRTA, the essential divide lies between decentralized and centralized architectures. In centralized architectures, the mixed auction based approach described by Sandholm [31] performs well in optimizing the task allocation from a global perspective. Yet, the approach suffers from restrictions such as the risk of the computational bottlenecks and the generation of a single point of failure. In contrast, decentralized architectures such as connected potential competition [22], partial replanning techniques [23], allow for local decision-making processes to occur even in an incomplete information environment.
Currently, research efforts are directed at optimizing decentralized solutions via hybrid architectures and improvements in inter-agent communication techniques. To exemplify, the partial planning algorithm proposed by Buckman et al. [23] addressed the dynamic adaptation process for real-time environments, whereas Xu et al. [29] dealt with the communication issue in mesh networks via distributed submodular optimization techniques. However, coordination problems may also cause inefficiencies in decentralized control, highlighted by the formalization given by Sayın [32], which represents the trade-off learned by the agents between ‘anarchy’ and ‘efficiency’.
Future studies should focus on the trade-off between communication and coordination, seeking a balance between autonomy and limited rationality through the use of consensus algorithms or distributed large language model (LLM) engagements [24,33].
Fig. 3 shows the conceptual evolution of the control models for MRTA architectures, focusing on the trade-offs and adaptation for both centralized and decentralized control models. Task allocation usually proceeds after establishing the objective functions, constraints, and task interdependencies. In centralized task allocation planning, the global controller uses deterministic task allocation based on the global view of the system and predefined objective functions for optimization. Centralized task allocation might be effective for small to medium-sized MRTA networks; however, for larger networks, task coordination and scalability could be problematic. In contrast, the decentralized approach focuses on task decisions for each robot. Robots rely on what they know locally, negotiate with their peers, and may even develop reputation systems to guide their choices. This makes the system more robust and better able to handle uncertainty. utilizing local information.
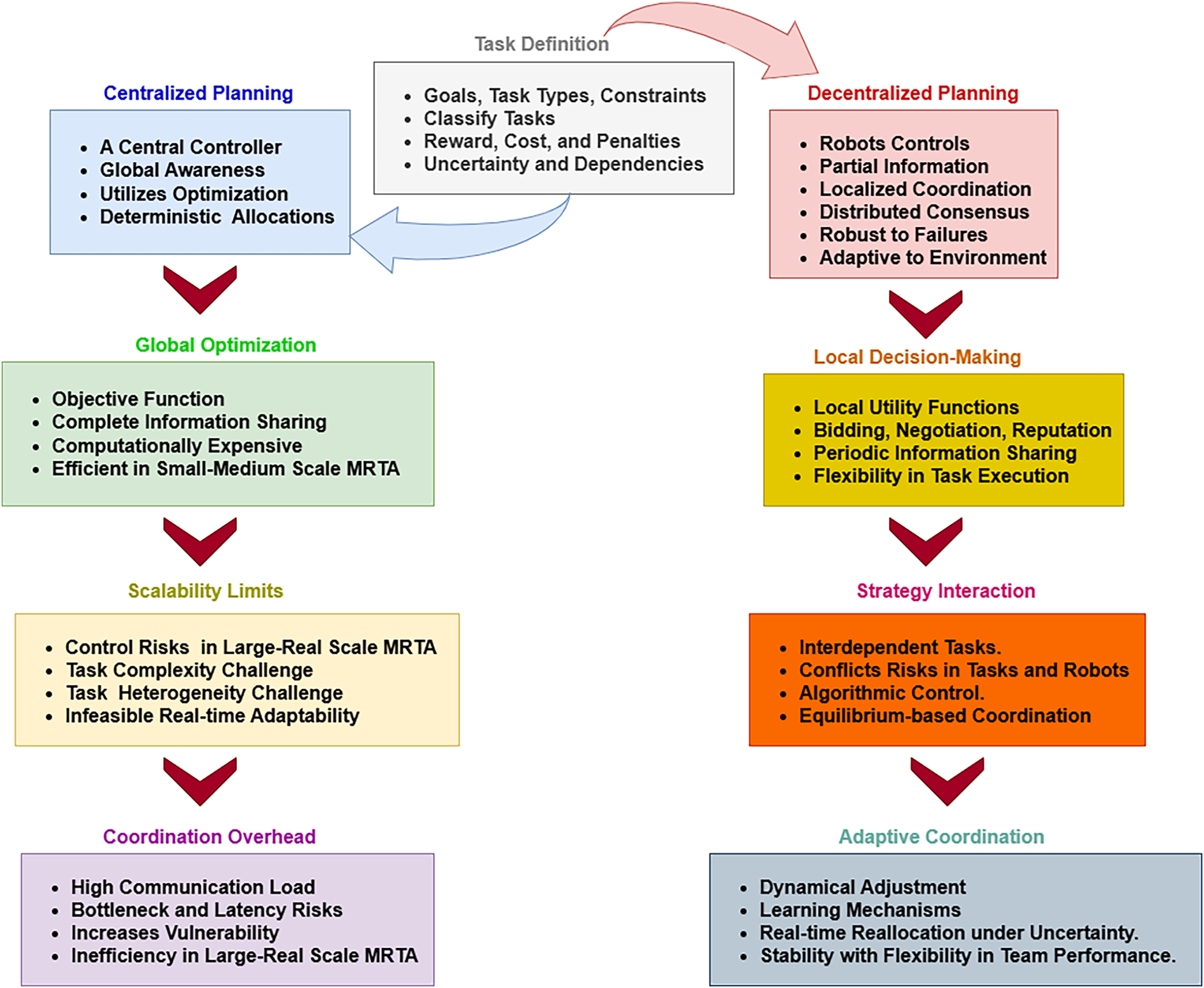
Figure 3: Conceptual flow of centralized-to-decentralized transition in MRTA context.
With the increasing interaction between the autonomous agents, there are certain dynamics of coordination and strategy formation. Game theoretical and machine learning algorithms are effective in maintaining the balance between the autonomy of the agents and the equilibrium among them. In total, Fig. 3 highlights the move from the control framework towards coordination, aided by the process of learning. This move marks a major advancement in the development of intelligent MRTA networks.
4.2 Conceptual Foundations of the Control Dichotomy
In MRTA, the main thing that is resolved is the optimal communication control and decision-making techniques carried out by a centralized controller or that arise naturally through distributed interactions between robots or agents that work together. In a centralized system, optimal or near-optimal policy decisions are made based on the overall perspective of each element in the system. Meanwhile, decentralized systems focus on large-scale problems, resilience to all kinds of disturbances, and the level of independence of each robot (autonomy). Decentralized systems are important when working in constantly evolving environments with limited communication processes. In practice, the core problem lies in determining the priority between optimality and scalability, especially when the robot network becomes more diverse, resources are limited, and communication between robots is increasingly limited.
4.3 Centralized Control Architectures
The central control MRTA systems generally depend on a single computing node that collects global information and calculates task allocations for all robots. Historically, this method has been preferred in well-organized industrial environments, where global information access and reliable interactions can be achieved.
Matos et al. [34] introduced a centralized management design for multi-robot path planning, and showed that centralized optimization can improve task efficiency and reduce potential collisions, especially in conditions where network delays are ignored. Meanwhile, Andersson [35] describes how the hierarchical application of centralized control in industrial assembly lines allows each agent to have full awareness of the overall system state.
Scalability remains one of the main limitations in the implementation of MRTA systems. Song et al. [36] reviewed centralized and distributed approaches to multi-UAV coordination and found that centralized strategies perform better than distributed approaches in small fleets (
4.4 Decentralized and Consensus-Based Frameworks
Decentralized architecture spreads the load in computing and decision-making procedures among agents to help in the creation of local autonomy while increasing the system’s resistance to failure. Each robot participates in the agreement process at the local level. This expands the capability to change the environmental ambiguity, although this approach often compromises global optimality.
Latest research focuses on developing structures that highlight communication effectiveness and consensus-based approaches. Wang et al. [37] suggests a decentralized assignment algorithm that develops communication efficiency in large-scale systems by minimizing message complication through sparse network topologies. Govoni and Cristofaro [38,39] suggest a repetitive consensus-based approach for systems with extreme heterogeneous agents. Here, Miele et al. [40] expanded this construction by combining decentralized coordination mechanisms with security guarantees through a distributed optimization approach, thereby overcoming significant limitations found in previous models. Huang et al. [41] exploit saddle point dynamics to design distributed algorithms that provide formal convergence guarantees while joining the concept of steadiness in control theory using multi-agent optimization principles.
The change of graph-based methods is gaining expanding attention. Peng et al. [42] applied a decentralized task distribution method based on graph theory to the target localization problem. The results exhibit that a context with a local topology can provide near-optimal outcomes. Meanwhile, Kashid and Kumat [43] suggested architecture with a high degree of decentralization, in which each agent functions in a layered decision order, illustrating effective harmony between centralized network models and fully allocated systems.
4.5 Hybrid and Learning-Driven Control Strategies
Modern studies have begun to weaken the line between decentralized and centralized approaches through the application of dynamic, learning-based control mechanisms.
Dai et al. [44] suggest an MRTA structure for heterogeneous systems that employ reinforcement learning (RL). This is to enhance the allocation and scheduling processes simultaneously. In this framework, decentralized agents network totally through a shared reward structure, which enables them to perform equivalently to typical centralized approaches. In addition, Guo et al. [45] operated using an approach that is adaptive and dynamic evolutionary collaboration by switching between centralized and decentralized interaction modes. Nonetheless, this relies on the level of task complication and the environment with its dynamics.
Guillet et al. [46] studied hybrid systems that include human association (human-in-the-loop), in which human operators partake in the decentralized consensus process, expanding system readability and reinforces security aspects in MRTA frameworks.
4.6 Comparative Evaluations and Empirical Trends
In the context of comparative trends in MRTA problems, Jamshidpey et al. [47] and Song et al. [36] did such studies, which show that no single model is universally outstanding in MRTA systems. A centralized control approach gives an anticipated level of optimality but confronts limitations in scalability. In opposition, decentralized control is scalable but less effective in coordination and prone to communication pauses.
This dichotomy highlights the control paradox that persists in MRTA, namely the need to balance individual autonomy and teamwork under conditions of uncertainty. In this context, hybrid models show considerable progress in achieving computational effectiveness and operational dependability.
4.7 Open Challenges and Future Directions
There are several research challenges, regardless of considerable progress, involving:
• Delays in decentralized systems that experience convergence and suboptimal allocation in extremely dynamic environments, even with effective communication methods [37].
• No less than a few structures (e.g., [40,41]) concurrently ensure security and performance.
• There has been an absence of exploration into adaptive systems that are dynamically competent to alternate between centralized and decentralized control, even though they have great capability to combine the advantages of both models.
• The mechanism of human intervention [46] still presents questions, particularly related to delegation of control, trust, and transparency.
Table 2, there is an overview of the centralized, decentralized, and hybrid MRTA control structures. The focus of this overview is on the implementation of principles, advantages, and limitations. Centralized control increases decision-making by warranting complete system understanding. However, it issues in scalability. Moreover, it is vulnerable to single points of failure. Contrary to this, decentralized control gives advantages in scalability and resilience via local consensus-based decision-making. Nevertheless, it endures restraints related to global optimality and convergence speed. Learning-based hybrid control, In the meantime, gives a balanced approach by blending global oversight with local autonomy via adaptive learning structures and reinforcement. Even though it comes with augmented computational complexity and challenges in implementation integration, this approach can improve system efficiency and flexibility.

Research on MRTA has shifted from comparing centralized and decentralized systems to leveraging their combined advantages. Future studies should focus on automatic context-specific adjustments, secure data processing, and enhancing human understanding of robot coordination.
5 Static vs. Dynamic Allocation
This section distinguishes between statistical and dynamic task allocation. It will analyze theories, algorithms, and trends aimed at optimizing both allocation types (see Fig. 4).
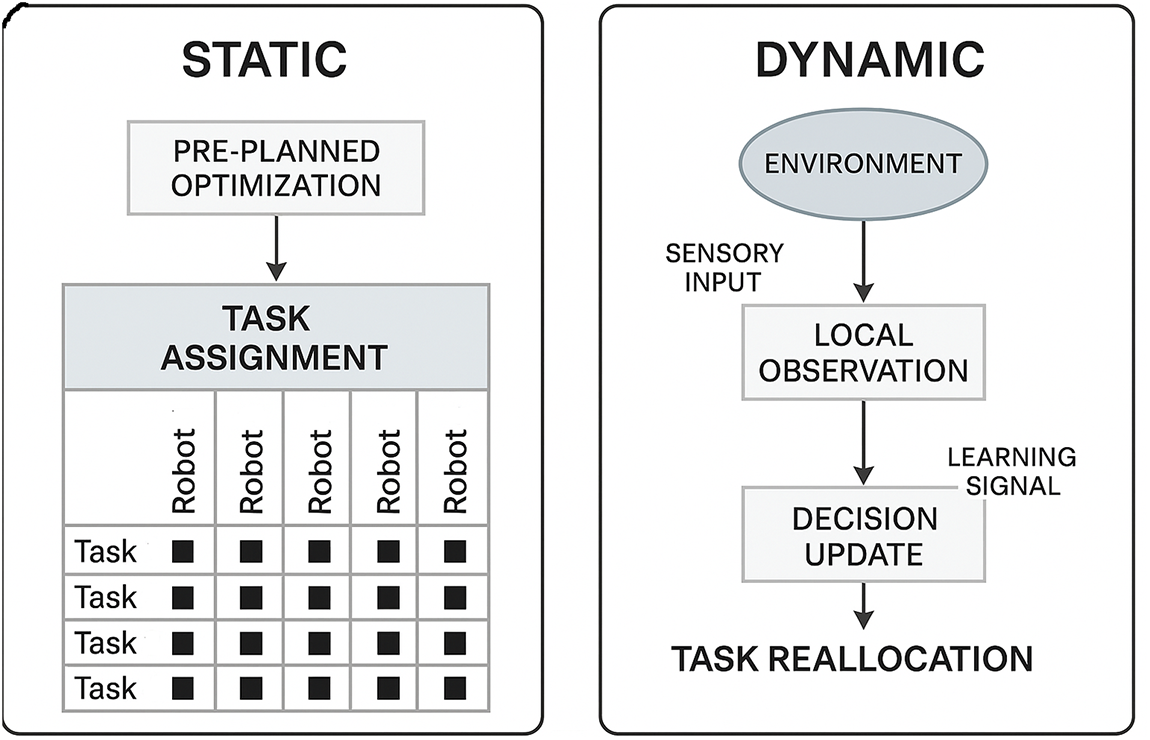
Figure 4: Comparison between static and dynamic MRTA paradigms. Static frameworks rely on pre-planned optimization, while dynamic approaches incorporate environmental feedback and learning-based reallocation.
A MRTA system can be either a static or dynamic. The choice significantly impacts adaptability, scalability, and robustness of robot-task frameworks, especially in unpredictable environments involving multiple heterogeneous robots. Although static MRTA is appropriate in structured domains, MRTA’s brittleness arises due to the pre-defined tasks and robot-task relationships in MRTA. Since real-world systems inherently involve uncertainty, they essentially need dynamic task allocation.
However, there is a lot of recent work focused on this ever-evolving task. For instance, formulations proposed by Chapman et al. [22] used potential games. Also, hybrid approaches for task decentralization were proposed by Butler and Hollinger [48] to change paths in mother-ship passenger systems. However, more modern approaches emphasize the increasing need for rolling-horizon tasking. These include ontology and clustering approaches in task adaptation in real time [49,50]. Also, application of deep reinforcement learning (DRL) in enhancing rolling-horizon efficiency in complex systems, such as satellites, was demonstrated in [51].
These works, together, seem to forecast a future in which dynamic MRTA is highly reliant on online learning, forecasting, and the capacity of robot alliances to adapt. Nonetheless, in spite of such advances, there exists, as of now, no unified theoretical foundation in real-time adaptability, especially in settings with communication limitations. The amalgamation of predictive control [52] and distributed learning seems, therefore, to be one promising way toward realizing the anticipatory capacity such systems demand.
5.2 Static Allocation: Predictability and Global Optimization
The static MRTA essentially presupposes the existence of complete information with respect to both task allocation and the environment in which the tasks will be executed; thereby, allowing the naturally deterministic models such as mixed-integer programming, graph partitioning, and combinatorial search to determine the optimal allocations for the robots. These models do have their performance strengths, especially in terms of robustness, predictability and achievement of global optimums.
In their thorough discussion of MRTA in industrial settings, Zhang et al. [53] confirmed the preeminence of static assignment, especially in strongly ordered settings such as assembly lines or logistics. These are, in fact, paradigmatic cases, highly amenable to static solutions with their well-characterized, reproducible task sets and easily foreseeable resource constraints. Supporting this viewpoint, another group, Arjun et al. [54], pointed out the efficiency of static solutions in robot coalition formation and in achieving optimal cost savings, especially when the complete task list is known. However, they pointed out an important weakness, namely, poor adaptability in environments in which tasks arrive stochastically (i.e., at random) or even in more irregular, unpredictable ways.
The static MRTA system faces limitations due to its inflexible resource allocation, which makes it ineffective against unpredictable events, such as hardware failures or new requirements. This rigidity results in a higher likelihood of operational failures and costs. As a result, the focus is shifting towards developing more adaptive MRTA task allocation strategies.
5.3 Dynamic Allocation: Adaptivity and Real-Time Coordination
Recent research efforts have resulted in noticeable progress in dynamic MRTA. Studies have made measurable progress in developing more responsive dynamic allocation techniques. For example, Arif and Haider [55] introduced a web-based system that supports dynamic task allocation in uncertain conditions. The framework allows teams to reassign tasks when new events occur. Their results showed that while online reallocation improved responsiveness, it also increased both communication traffic and computation time.
Following on the previous work, Wang et al. [56] extended this approach to digital-twin factories, which utilizes virtual-physical synchronization to perform dynamic assignments based on Industry 5.0 principles. Their distributed framework demonstrates that using digital twins as real-time feedback mechanisms improves adaptive coordination and manufacturing durability.
Looking into the issue from a different angle, Qiu et al. [57] suggested a consensus-based dynamic allocation model to efficiently assign tasks to robots, considering each robot’s payload consumption in the decision-making of the assignments. This consensus’s technique remarkably resulted in a balanced workload and better energy management, marking a gradual shift towards MRTA systems that integrate energy awareness into coordination logic.
In relation to this work, Slim et al. [58] focused on adaptive bandwidth allocation. During bandwidth instability, the communication resources of robots are dynamically arranged, which eventually increases complexity in multi-resource optimization.
5.4 Learning-Driven and Behavioral Coordination
Recently, robots have been designed to adapt learning based on their past behavior and experiences during their task executions. This learning mechanism becomes more effective when robots team up in dynamic coordination. For example, Heppner et al. [59] used “behavior trees” to assist a mixed team of robots to adjust on the spot. With their method, a robot can perform a new task simply because a “behavior trigger”, such as a simple rule, fires off, avoiding a central system finding the perfect new plan for every robot.
Others have focused on learning from experience. Both Bezerra et al. [60] and Yuan et al. [61] explored the possibility of team self-reorganizing when tasks arrive unexpectedly. They used RL where robots essentially learn from historical feedback (trial and error) to enhance their teaming up over time. This approach effectively blends the classical dynamic MRTA problem with modern multi-agent learning.
Taking a completely different angle, Tuck et al. [62] used a formal logic method called SMT (satisfiability-modulo-theory). They turned assignment and relocation rules into a set of logical constraints, allowing the system to make decisions that are safe and correct, and giving formal guarantees even when the situation seems random or unpredictable.
5.5 Hybrid Allocation: A Spectrum of Adaptivity
Recent works indicate that static and dynamic MRTA should not be considered as dual concepts but rather as points in a spectrum of adaptivity. Choudhury et al. [63] formalize dynamic MRTA in the context of uncertainty and temporal constraints. They show that dynamic methods can achieve near-static optimality when reallocation is constrained by predictive uncertainty.
Fazal et al. [64] and Jin et al. [65] view dynamic task assignment from resource sharing among robots and team competition perspectives, respectively. In both models, the stability of allocations will depend on the real-time performance thresholds of agents or the intensity of competition. These works together illustrate that dynamic allocation is not necessarily merely reactive; it can also be anticipatory when integrated with a model of prediction or learning.
The dominant consensus is that optimal systems modify an assignment of tasks dynamically only when the marginal benefit exceeds the coordination cost, an arrangement that has rarely been explicitly investigated in earlier MRTA research.
5.6 Challenges and Research Gaps
Despite major advances, several conceptual and practical gaps remain unresolved in the transition from static to dynamic MRTA:
• Dynamic allocation often improves adaptability but risks oscillatory behavior or instability in task assignment. Only a few works, such as Tuck et al. [62] and Qiu et al. [57], address convergence or bounded reallocation. There is a lack of formal metrics quantifying when and how often reallocations should occur.
• While Wang et al. [56] show how digital twins can facilitate adaptive MRTA, the broader challenge is bidirectional integration of how allocation algorithms can learn from and influence digital-twin simulations in real time. Research still lacks generalized architectures for cyber–physical co-adaptation.
• RL-based dynamic coalition models [60,61] demonstrate adaptability but often at the expense of interpretability and training efficiency. Future work should investigate meta-learning or transfer-learning approaches to accelerate learning-based reallocation across different environments.
• Dynamic MRTA rarely models joint optimization of energy, bandwidth, and task execution. Although [57,58] introduce resource-aware elements, comprehensive multi-resource adaptive frameworks remain limited.
• Empirical evidence (e.g., Verma et al. [66]) suggests that combining static preplanning with dynamic adaptation yields better performance under communication restrictions. However, the design of hybrid MRTA systems, where static plans provide baseline stability and dynamic layers handle uncertainty, is still fragmented and lacks formal performance guarantees.
• Few dynamic MRTA frameworks consider human oversight or intervention in real time. Given growing interest in multi-human multi-robot teams [61], incorporating human intent prediction and adaptive feedback loops is a major unexplored direction.
MRTA research is evolving towards intelligent systems that integrate both static and dynamic task allocation methods. Currently, these systems transition seamlessly between approaches based on real-world conditions, enabling robots to respond efficiently to unexpected tasks and unstable network situations. Future MRTA systems aim for self-regulation, minimizing the need for human oversight in task redistribution among robots to maintain collaboration. This shift towards a flexible and adaptive task allocation system represents significant progress in robot technology, aligning with Industry 5.0’s emphasis on intelligent automation that collaborates with humans rather than replaces them.
6 Heterogeneity and Coalition Formation
Robot heterogeneity and their coalition formations are important in MRTA problems, especially when the environment is noisy and uncertain. On the other hand, the conventional coordination-based models are capable of coordinating between robots according to their expertise. Yet, this methodology fails, especially when there are complex elements in the environment, such as energy limitations and uncertainty. This failure creates the basis for the formation of a coalition-based framework. This formation can be effective in task allocation management because it can utilize the diverse capabilities of robots. In addition, this framework can adaptively utilize natural resources, allowing for cooperative task allocation. One of the advantages is the ability of robots to interact with each other, achieving a balance between specialization and limitations. In practice, this coalition framework requires scalable and adaptive decision-making so that tasks can be carried out properly even if the capabilities of the robots are not balanced. Therefore, this section discusses the theoretical basis of the coalition-based MRTA framework. In addition, several priority research topics related to strategy development in MRTA systems are also provided. One possible development is to integrate MRTA with mathematical theories such as game theory, machine learning, and other mathematical theories that support responsible, cooperative, and autonomous strategies.
One of the key characteristics of MRTA problems is the heterogeneity of robot capabilities. This heterogeneity currently exists, including robots’ ability to assess a task, or to manage energy, or to communicate with other robots [67,68]. With technological advances, this heterogeneity can be exploited as an advantage for MRTA systems. Current research focuses on the development of a coalition-based framework that can improve efficiency and adaptability in dynamic and uncertain environments [21,69]. The development of such a framework can ensure effective task allocation decisions. However, it still has shortcomings, especially when working in large systems, due to coalition formation and cooperation. Here, the decision-making analysis can minimize errors in coordination, but it also has the disadvantage of losing the essence of overall optimization, especially if the robots are not connected to each other [70,71].
6.2 Coalition Game Formulations and Resource Sharing
To create collaboration between robots, a game theory approach is necessary. This theory can optimize coalition formation, such as efficient use of resources and improve system performance, especially when facing large-scale problems [72,73]. In addition to the integration of game theory, a new approach called Multi-Robot Preemptive Task Scheduling with Fault Recovery (MRPF) can be implemented to obtain optimal robot task allocation. This approach emphasizes each robot to be able to prioritize tasks, have the ability to coordinate, and ensure tolerance for any errors [74]. The integration of game theory and the MRPF approach will be even more optimal if the system has adaptive properties, so that each robot can consider the risks involved in carrying out tasks and can adapt to any limitations [75]. The development of existing MRTA systems is still not sufficient to solve real-world cases, because real-world cases require subtasks that can operate independently. This underlies the existence of a new framework in allocating multi-robot tasks, which can integrate task priority levels with cooperation between robots. This framework can allocate tasks automatically, thereby increasing efficiency in completing difficult tasks [76].
6.3 Learning-Driven and Evolutionary Coalition Strategies
Learning-Based and Evolutionary Coalition Approaches RL-based approaches have improved scheduling and adaptation in different environments, as described in [44]. While these models can dynamically learn ask-agent mappings, they often lack formal guarantees about convergence and fairness in the distribution of coalition rewards. Evolutionary game formulations such as [77] incorporate dynamic reward updates and increased robustness to network disturbances to address these issues, but this results in higher algorithm complexity. Improved robustness and self-organization can be achieved through the use of hybrid approaches that combine adaptive RL with game-based equilibrium notions. Using adaptive learning or revolutionary changes in coalition games still holds promise, but it is still an understudied area.
6.4 Communication-Aware and Cross-Layer Integration
Cross-layer coordination between communication and cooperation layers requires further research. Studies focus on bandwidth optimization and shared tasks [70,78,79]. However, the interoperability between edge computing, IoT-based decision layers, and autonomous collaborative logic remains unclear. Communication-aware coalition models reduce message size and coordination latency, which is crucial for real-time applications such as UAV swarms. As demonstrated by their relevance across domain syndication, coalition games can serve as a theoretical basis for upcoming distributed robotic autonomy.
6.5 Open Challenges and Research Directions
Although much progress has been made, there are still several important problems in current research on coalition formation in heterogeneous MRTAs:
• As team size increases, coalition formation becomes computationally more difficult. Even distributed coalition games [21,69] require a centralized component to check equilibrium or distribute rewards. To ensure applicability in large-scale real-time operations, future research should emphasize approximate coalition assessment, heuristic pruning, or hierarchical decomposition.
• Current frameworks accept full observability or simultaneous information communication. Since dynamic and partially known environments are still understudied, incorporating belief-aware, probabilistic, or Bayesian coalition formation could enable adaptive decision-making under uncertain circumstances.
• Few studies optimize coalition strategies with bandwidth, latency, or energy constraints, although [70,78,79] consider communication and networking aspects. Future research should investigate edge-based coalition formation and cross-layer resource allocation for delay-sensitive applications such as swarm UAVs and autonomous logistics.
• Current coalition frameworks focus on maximizing immediate utility rather than ensuring stable and fair participation. Incorporating fairness standards such as Shapley values or enforcing stable Nash coalitions could improve long-term team cohesion and prevent agent defection.
• Game theory remains largely distinct from RL. A more robust and explainable MRTA framework could be generated through hybrid approaches that combine learning-based adaptation with equilibrium-based coalition logic, such as meta-learning coalition policies or embedded evolutionary dynamics.
• As emphasized in [21,80], the field lacks consistent datasets and evaluation metrics for coalition-based MRTA. For reproducibility, scalability testing, and fair comparisons between algorithms, the implementation of open benchmarks and cross-domain simulation environments is crucial.
One of the phenomena that occurs in heterogeneous MRTA is coalition formation. However, coalition formation has undergone a transition in terms of approach. The transition that occurred was the formation of coalitions with a static and centralized approach to a distributed approach based on learning and the use of game theory. Despite this transition, heterogeneous MRTA problems still face significant challenges, some of which are heterogeneity in task allocation, uncertain environmental situations, and equalizing task difficulty levels. Over time, these challenges have been gradually addressed through coalition formation with an adaptive approach and the use of hybrid methods.
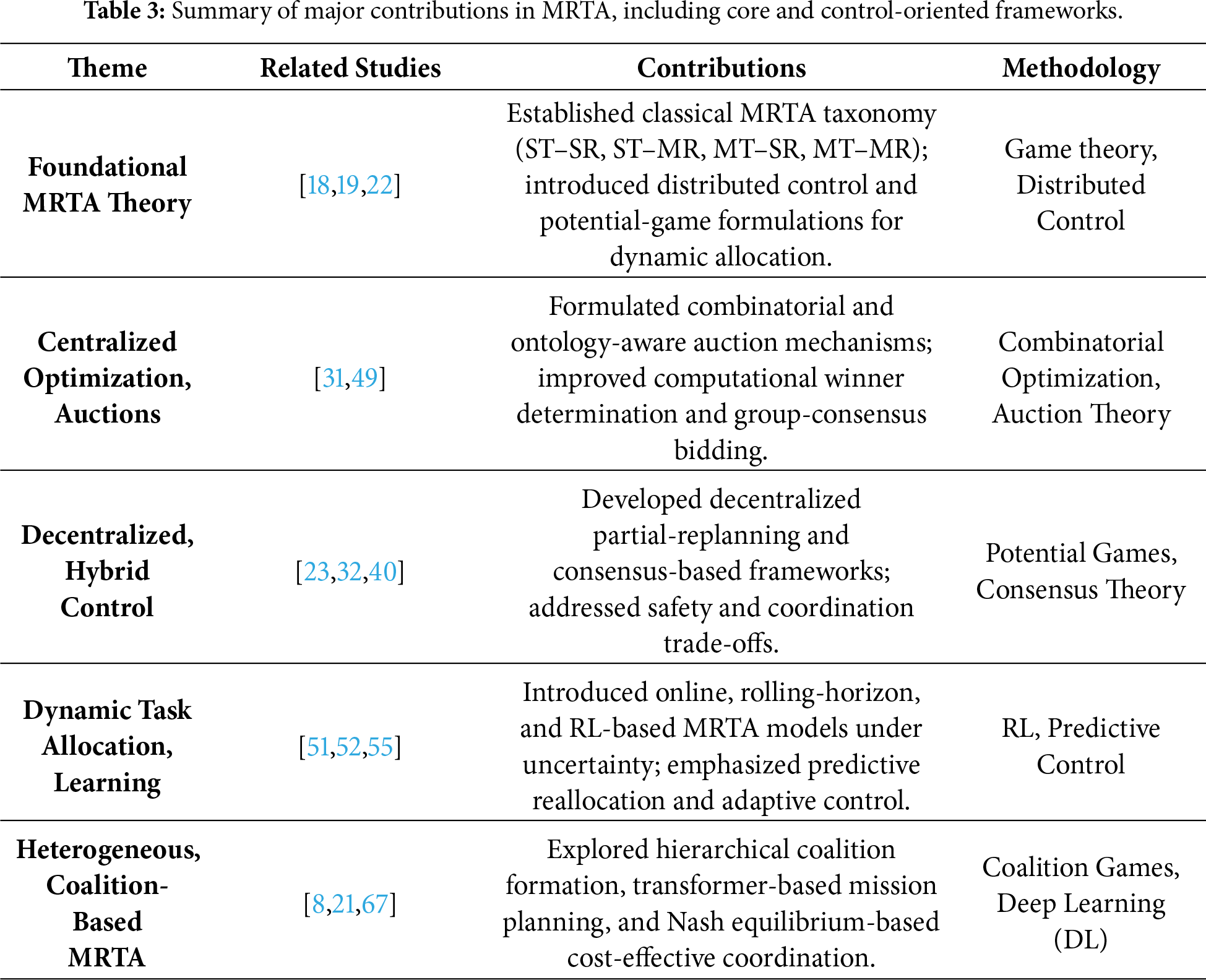
Table 3 provides a summary of developments in the MRTA scheme. The MRTA developments discussed focus on system control methods, the evolution of which is related to the shift in the basic taxonomy to a dynamic, learning-based method. Initial research used game theory to map existing tasks and available robots. Subsequent MRTA research employed a centralized approach to decision-making. Decision-making was based on control and game theory. Based on previous research, various studies were conducted to develop centralized planning, including the use of auction mechanisms and consensus systems.
7 Energy-Harvesting Robotic Networks
Energy availability is essential in the process of task completion by robots. Although it is a major factor, not every environment has adequate energy sources. In addition to energy limitations in the environment, the inability of robots to collect energy independently also has a significant impact on the task completion process, such as hindering robot mobility, difficulty in scheduling tasks, and ineffective communication among robots. Therefore, innovation and development are needed for robots to gain the ability of harvesting sufficient energy for their task allocations. With this capability, task completion will be optimal because robot interactions will be more effective and robots will be able to minimize all disturbances. One of the recent innovations that has been created is the energy-harvesting robotic networks (EHRNs). In this context, the MRTA becomes energy-harvested, which means simply that robots harvest energy spent through solar, wireless power transfer, or kinetic energy and integrate it directly into their task allocation and coordination mechanisms. This innovation was built with a control system that combines robot capabilities with power management. In addition to innovations in robot capabilities, task allocation strategies must also be developed to maintain the suitability of tasks and available energy. As in EHRN, the robots are assigned a hybrid framework, enabling them to allocate tasks while predicting future energy requirements.
To address energy limitations, innovative capabilities are presented through EHRNs. This innovation can improve the quality of MRTA, because task allocation is carried out by considering energy availability [4]. Several developments have also been made, such as the development of self-sustaining aerial robots (SSARs) that integrate energy harvesting and energy optimization technologies into robots, thereby increasing robot endurance [81]. Furthermore, renewable energy technologies, such as electromagnetic generators (EMGs), piezoelectric nanogenerators (PENGs), and triboelectric nanogenerators (TENGs), have been integrated into the robot system. This integration can increase the resources needed by robots [82]. Despite the many innovations that have been made, MRTA development still needs to be carried out, especially in the areas of optimization, robot energy storage capabilities, and autonomous robot development [83]. Furthermore, energy harvesting methods have also evolved, where energy can now be harvested using wireless sensor networks [84]. In addition to energy harvesting, wireless sensor networks can also be developed as a means of energy-aware communication through Non-Terrestrial Networks (NTN) [85]. On the other hand, robot development also continues to be carried out for energy conservation. Ito et al. [86] introduced adaptive robots that are capable of working in various modes and can switch statuses. This development will maximize task completion while saving energy. In Section 6, a framework with a coalition approach was discussed. With the robot’s ability to harvest energy, a framework with a coalition approach will be more effective, especially on a large scale. This is because task allocation decisions are influenced by the level of energy efficiency and the robot’s ability to collect energy [8,67].
Fig. 5 presents conceptual architecture of an EHRN for energy-aware MRTA. The framework integrates energy-harvesting robotic units, energy-aware task allocation and routing mechanisms, learning-based control and co-design loops, and IoT/edge-assisted communication infrastructure. By jointly considering harvested and residual energy, task energy costs, communication overhead, and adaptive control policies, the proposed architecture enables sustainable, scalable, and robust multi-robot operations with extended mission lifetime and fair energy distribution.
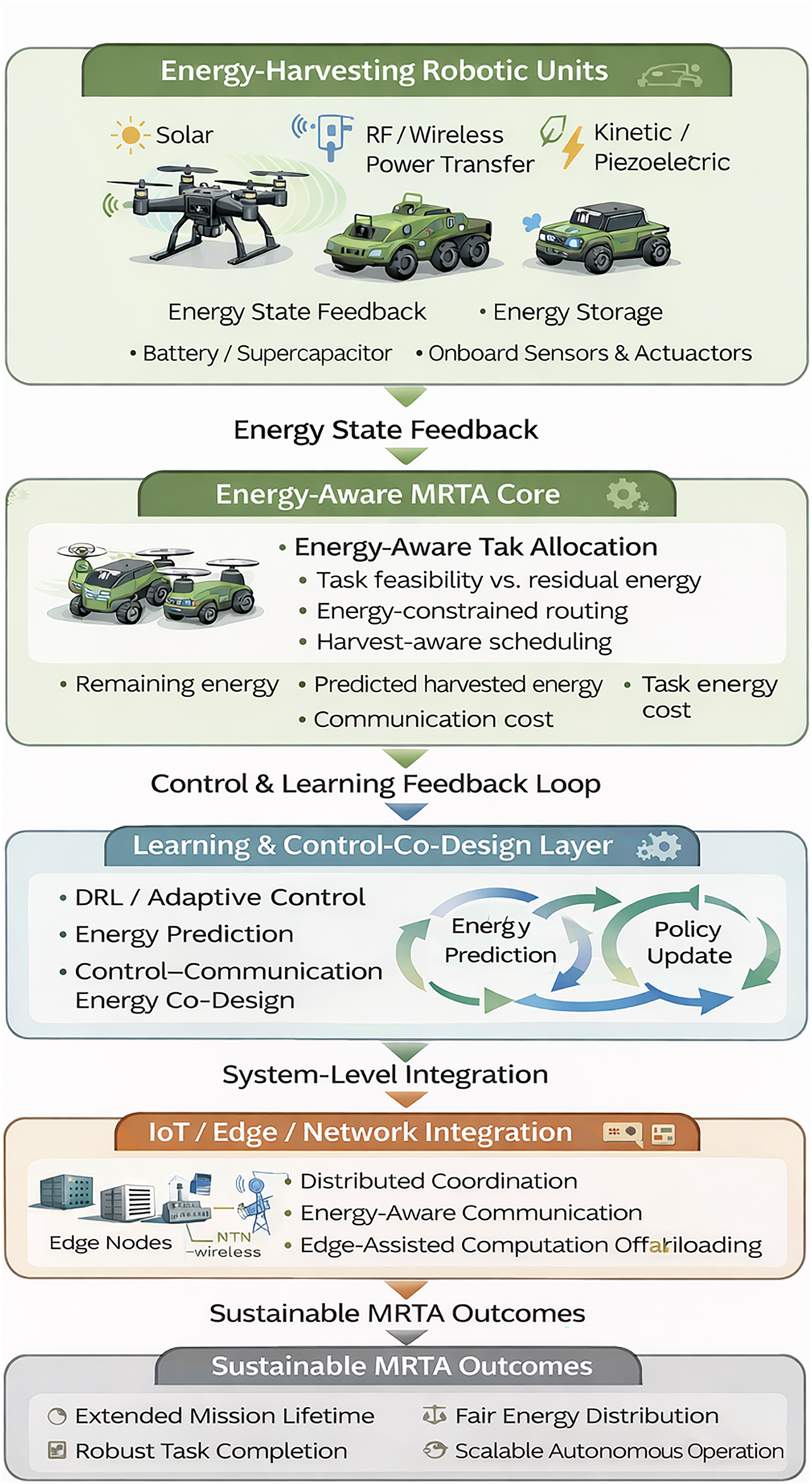
Figure 5: A flowchart illustrating the energy-harvesting robots’ workflow in intelligent task allocation.
7.2 Core Research Themes in EHRNs
EHRN research can be grouped into four main interrelated topics:
• Energy-aware allocation and routing algorithms.
• Sensing/harvesting hardware and deployment strategies.
• Learning-based and control-co-design approaches.
• System-level integration with IoT/edge and communication protocols.
Communication-aware alliance and Nash-based matching methods ensure compliance with transmission energy constraints during assigning tasks.
7.3 Energy-Aware Allocation, Routing, and Hardware Advances
Various renewable energy collection and storage technologies such as piezoelectric systems, RF, flow-protected generators, or batteries and capacitors have improved the operational capabilities of robotic units [82,87,88]. Research on optimizing UAV placement for maximum energy collection includes the use of 3D placement based on soft actor-critic. This approach highlights how location placement affects mission scheduling related to power supply availability [83,89]. Nature-inspired symbiotic aerial robot design focuses on mission design that enables the utilization of renewable energy flows so that operations can run continuously [81]. Many studies explicitly include energy availability as a constraint in task allocation and route determination. Networks that schedule tasks based on the amount of energy collected or remaining energy generally demonstrate better operational endurance and higher mission completion rates [4,90–93].
7.4 Learning-Based and Control-Co-Design Approaches
Learning algorithms can be helpful in the energy management of robots. For example, an application of DRL in MRTA makes the use of energy by robots more efficient, coupled with the use of IoT systems that enable robots to manage resources more efficiently [94]. Several studies have integrated machine learning, such as UAV swarms for wireless power transfer [95] and DRL-based energy-efficient relaying networks for multi-agent MRTA [96]. The integration of machine learning supports the achievement of communication systems and the use of IoT systems in MRTA that are autonomous, efficient, and adaptive to environmental changes. MRTA systems with machine learning integration will be maximized when accompanied by good design. The MRTA setup is considered cognitive when robots utilize perception, learning, reasoning, and adaptive decision-making capabilities in their task allocation processes. The design in question is a task completion strategy, such as control loops, robot placement, and energy management. Eris et al. [97] developed a design with machine learning through an algorithm that considers node position, remaining energy, and the amount of energy that must be harvested. This strategy has been applied in the case of environmental monitoring through a cluster-based Underwater wireless sensor networks (UWSNs). This application shows that this design is capable of reducing the amount of energy required, improving communication between robots, and extending the network’s operational life.
7.5 System Integration with IoT and Edge Computing Infrastructure
Strategies such as GSAgri for shifting workloads and dividing tasks by considering the energy available at edge nodes show that how workloads are placed greatly affects robot performance and task delays [98]. Strategies that prioritize even power distribution and relaying with limited block lengths demonstrate the importance of emphasizing fair performance among various energy-harvesting agents [96]. Although the number of studies continues to grow rapidly, there are still several fundamental limitations, both methodological and practical, across studies:
Key limitations:
• Most allocation algorithms assume that the harvest model is stationary, when in fact harvesters exhibit non-stationary dynamics that depend on context (such as wind or RF variability), thereby reducing system resilience [87].
• The majority of studies focus only on optimizing a single metric, such as durability or throughput, and have not considered joint optimization between task benefits, fair energy distribution, communication costs, and reliability. In addition, permanent physical designs and MRTA algorithms are rarely optimized together, even though they are interdependent [90,92].
• There are issues with RL-based methods as they often require large training data and are difficult to apply in different environments (transferability) [82,83,94,97].
• There is still a lack of distributed algorithms that guarantee convergence or optimal energy results in asynchronous updates, and the absence of standard models or energy benchmarks hinders fair comparisons between methods and the reproducibility of studies [4,82,91].
Research priorities:
There are several key research priorities in this field. The first priority is a system capable of integrating energy predictions in certain environments (seasonal/daily) with task allocation policies. The existence of such a system can evolve previous scheduling methods into more anticipatory and adaptive scheduling. To meet this need, the focus should be taken on multi-objective formulations to achieve energy balance, computational processes, and the benefits of the objectives. Furthermore, a system also requires a permanent energy design with proper task allocation strategies. This can be achieved by using meta-RL or generalization models based on existing field data. One effective way is to develop a decentralized MRTA method, as this method has robust capabilities for unstable energy quantities. The development of such a method must be supported by standardized metrics, data transparency, and increased collaboration.
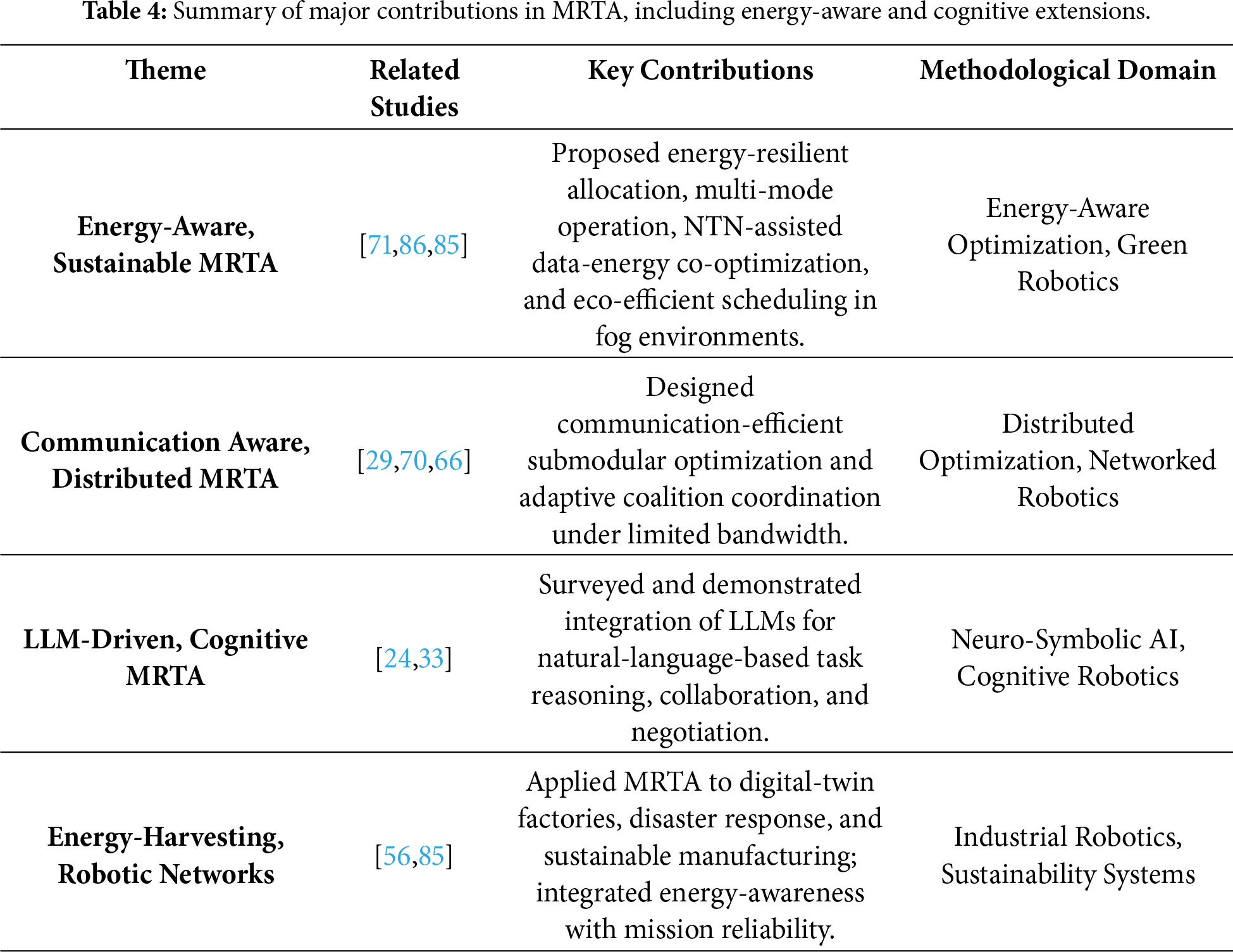
Table 4 synthesizes the principal contributions and emerging research trajectories in MRTA, emphasizing the integration of energy, communication, and cognitive aspects. Energy-harvesting robotic networks present a viable pathway toward realizing long-lasting, self-sustaining multi-robot systems. The incorporation of harvesting realities into MRTA demands methodological innovations in simulation, algorithm design, and system integration. The fusion of energy forecasting, co-design schemes, data-efficient learning, and decentralized protocols is paramount for developing robust, field-deployable EHRNs. While recent literature ( [4,81–83,94]) provides substantial foundational elements, future breakthroughs will depend on successfully integrating forecasting, fairness-aware coordination, and scalable learning within realistic energy dynamics.
The integration of game theory into the MRTA model serves a crucial purpose, particularly in analyzing and constructing reward models and modeling interactions between robots. These models empower robots to act as rational agents, tasked with maximizing profits without neglecting limited energy. Furthermore, these robots have the ability to compete and cooperate to achieve shared and individual goals. This integration of game theory is currently very popular. However, various challenges remain in its implementation. This is because robots must be able to adapt to ever-changing environments, determine appropriate strategies when tasks and other robots change. Furthermore, the most common challenge is the enormous computational requirements that hinder system efficiency and scalability.
Fig. 6 illustrates various game types involved in MRTA problems. Here, hybrid games provide heuristic-based decision-making, while human-robot games show their potential to include human behavior and decision-making to control the coordination through leader-follower methodology. On the other hand, cooperative games establish a cooperation on a common goal either through bargaining or Shapley coalitions to maximize the collective gains of robots, while social-behavioral games provide long-term adaptation strategies by robots for their optimal decisions in MRTA problems. When energy consumption and harvesting are concerned, then the game becomes energy aware, where robots take their energy and their resource constraints into consideration when deciding, while in a more advanced platform where the environment is noisy or unpredictable, then advanced games take place to measure robot-task allocation for supporting risk-aware allocation strategies.
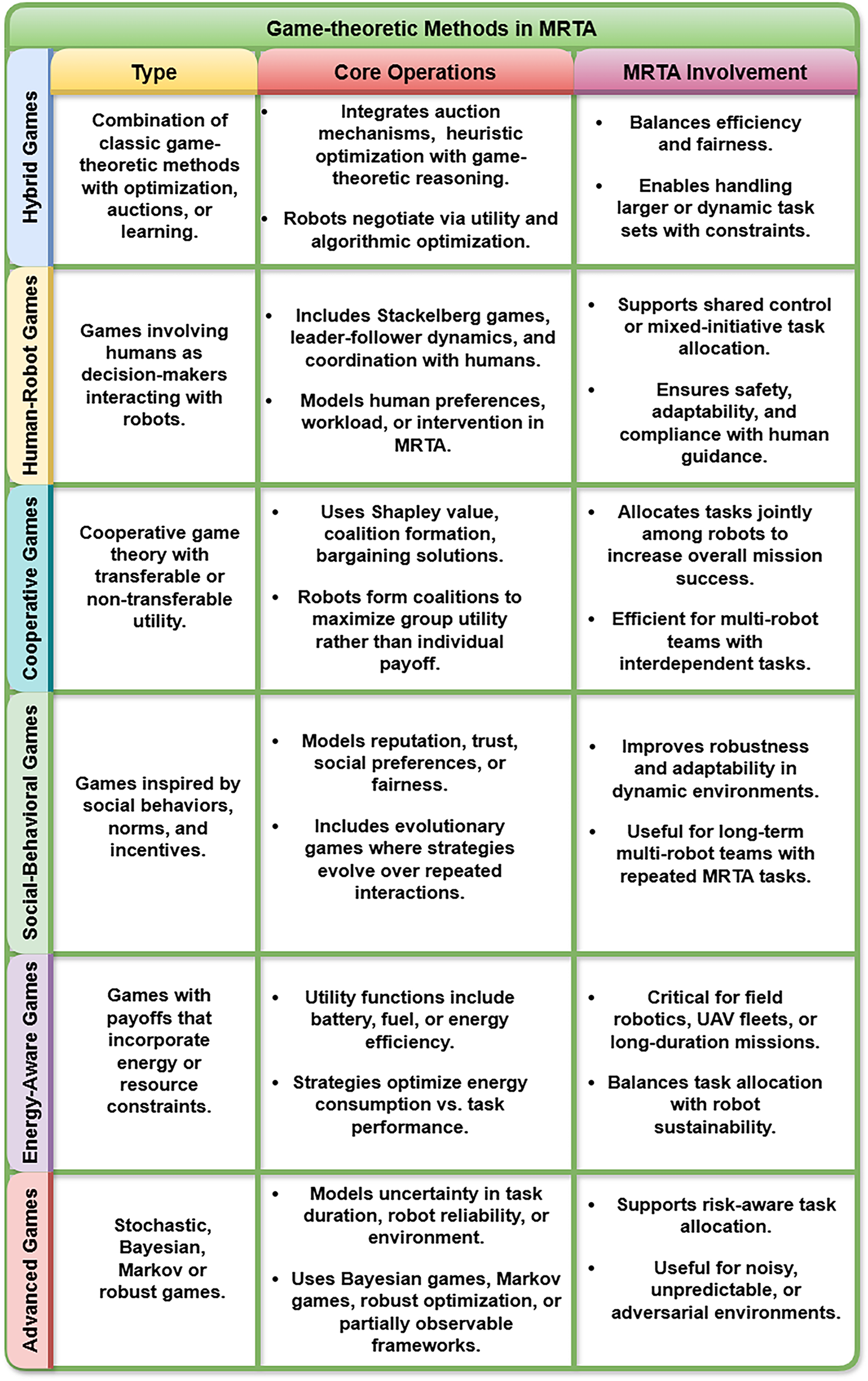
Figure 6: Various game theory methods with their types, core MRTA duties and involvements.
8.2 Classical and Hybrid Game-Theoretic Foundations
The beginning of MRTA research in game theory is to position robots as players whose goal is to optimize their individual or group outcomes. Combining game theory approaches with artificial intelligence, optimization, and cognitive simulation has broadened the foundations of MRTA. This is in line with [99], where a hybrid Game Theory–Particle Swarm Optimization (PSO) approach is introduced for collaborative 3D path planning. The study showed improved convergence and reduced collision risk in dynamic settings. In line with these findings, reference [100] introduced an optimization strategy that incorporates a game theory-based reward system into swarm decision-making, resulting in increased equilibrium stability and task coverage efficiency. These studies have shown that the application of hybrid methods, both evolved and natural, can improve the efficiency of strategies in managing multi-agent systems.
8.3 Human–Robot Interaction and Cooperative Games
The application of game theory in MRTA is increasingly developing, this is strengthened by the existence of Human-robot Interaction (HRI). As in [101–103], it shows that robots can behave like humans when working with humans. In those studies, researchers designed a series of policies for robot actions with a combination of empathic-non-empathic, proactive-reactive, ego non-ego approaches. By conducting two experiments, it was found that robots can behave empathically and proactively. Meanwhile, human-robot physical collaboration with the Game Theory distributed Model Predictive Control (GT-dMPC) + Recurrent Neural Network + Fully Connected Layer (RNN + FC) approach, robots can provide more efficient, accurate and natural assistance to humans. The second direction of the research is to understand the social psychological factors in robot behavior and learning intensity, real-time adaptation in physical collaboration. With this progress, there is certainly security in communicating and coordinating securely between robots. By utilizing blockchain technology as shown by Gul et al. [104] combining two game theories, namely Stackelberg Game and Nash Game into the Internet of Drones (IoD) as multi-drone task allocation, and maintaining stability between drones. The IoT is layered with blockchain to protect communications and data. While communication security is guaranteed, there are several challenges: blockchain systems have high transaction latency because each drone must synchronize the entire block record, making them inefficient for real-time communication between drones. Such a system is crucial for MRTA applications, which require secure coordination and communication between robots.
8.4 Social and Behavioral Game Models
Several recent studies have examined social dynamics and behavior in human environments where robots coexist. In [105], a non-cooperative game theory model was presented to coordinate multiple robots in a crowded human environment. This is in contrast to [106], which used multi-robot cooperative navigation with a learning-based model predictive control approach. Combining Game Theory and Social Force Model (GTSFM) can improve robot integration in social environments. These studies show that there are positive changes in the MRTA model. This emphasizes the importance of achieving a socially optimal balance, not just individually rational outcomes.
8.5 Resource-Constrained and Energy-Aware Games
Game-theoretic MRTA has been utilized in resource-constrained networks, particularly in addressing charging and energy-sharing challenges, from a systems optimization viewpoint. The models presented in [107,108] conceptualize charging coordination between robots and electric vehicles as decentralized games, facilitating efficient scheduling and load balancing in the face of uncertainty. Hamidoğlu et al. [8] present a cost-effective Nash-based allocation model for distributed robotic networks, showing enhanced fairness and communication efficiency relative to conventional auction-based task assignment. These studies connect MRTA with sustainable robotics, proposing game-theoretic reasoning as a cohesive principle for optimizing both resources and tasks.
8.6 Advanced Game Models: Uncertainty and Multi-Team Interactions
The development of game theory in MRTA makes it possible to overcome allocation problems with uncertainty, providing a strategic way to complete information and interaction with agents. For example, reference [109] uses a global game approach to maintain energy in a robot colony. This approach provides a negative feedback mechanism to improve decision making and prevent continued failure when a robot is removed from the system. Meanwhile, reference [110] explains that robot swarms tend to try various things (exploration) when the information obtained by the robots is limited. Although initially the robot swarm does not know the full condition of its environment, the implementation of this strategy makes them more flexible and efficient in completing tasks. Meanwhile, reference [111] uses game theory in a multiplayer autonomous race. The approach involves designing a weight function for a bipartite graph matching method focused on achieving minimum weight. In this case, two algorithms are used: the Task Assignment Algorithm and the Matching-Based Iterated Best Response. The effectiveness of the Task Assignment Algorithm is demonstrated through simulations that compare results with and without its application. Following this, a matching-based algorithm is developed to enable vehicles to iteratively update their strategies based on the task assignment algorithm. This research highlights how game theory can be applied in MRTA to navigate uncertain environmental conditions, facilitate logical decision-making, and enhance competitiveness.
8.7 Open Challenges and Future Directions
Notwithstanding this advancement, numerous research gaps remain. Most game-theoretic MRTA models [99,100,110,111] primarily depend on static or short-horizon equilibria, such as Nash or Stackelberg, which may prove inadequate in long-term, non-stationary environments characterized by evolving agent preferences. Evolutionary or learning-based game formulations, including repeated games, differential games, and evolutionary game theory [112], are insufficiently examined in the context of continuous coordination scenarios. Almost all MRTA methods assume that all robots have the same capabilities and information. In reality, robot capabilities often vary, and the information they receive is sometimes delayed or incomplete. Furthermore, energy factors and interactions between robots are often overlooked in the main calculations for variable optimization. These factors must be taken into account so that the system can adapt to real-world conditions. Computational challenges also present their own challenges. Many current models are too complex and demanding to run quickly and effectively, especially as the number of robots or tasks increases. This makes them unsuitable for use on a larger scale of robots.
Although game theory has enabled robots to collaborate more intelligently and learn to adapt, future research will focus on the following:
• Developing game models that can take into account energy awareness and communication,
• Integrating DRL to enable strategy adaptation to changing (dynamic) environments,
• Robots can learn to reach balanced decisions even when information is incomplete and their decision-making capabilities are limited,
• Designing efficient and scalable decentralized systems to address uncertainty between humans, robots, and their environment.
The goal of this research is crucial for transforming MRTA from a mere theoretical model into a real, autonomous robotic system.
9 Hybrid and Multi-Objective Strategies
Current MRTA problems have made significant progress, especially when achieving multiple objectives. As previously explained, in real-world situations, a balance is essential between efficiency, energy consumption, communication strategies between robots, system security, and system resilience. Furthermore, the MRTA system must be able to achieve collaborative human work objectives, which have previously been unattainable due to the use of a single objective function. To achieve this, the MRTA system must be developed using hybrid and multi-objective strategies. These strategies serve as more effective work concepts because they are able to address balance issues. Furthermore, these strategies have the advantage of being able to be combined with metaheuristic optimization methods, evolutionary computation processes, and control concepts based on machine learning. These methods integrate global search and adaptive decision-making. This allows robots to achieve a balance between multiple objectives in dynamic, uncertain, and resource-constrained environments. This method will be even better if accompanied by a multi-objective formulation, because the multi-objective formulation not only includes performance measures, but also can include clarity, fairness, and system robustness as indicators in the optimization process. In this section, we will discuss the impact of the integration of hybrid methods on MRTA research, as well as the integration of Pareto-based learning in MRTA. The discussion focused on the development of algorithms that can integrate optimal computation processes and machine learning such as RL. This is done to achieve robots that are able to coordinate, able to solve problems on a large scale, able to work adaptively, and have goals aligned with humans.
Multi-objective and hybrid optimization methods are prevalent in MRTA due to the necessity of balancing multiple, frequently conflicting criteria in real-world applications, such as makespan, energy consumption, risk, reliability, human ergonomics, and communication costs. A variety of techniques, including multi-objective evolutionary algorithms, ant-colony systems, hybrid swarm/metaheuristic combinations, and learning-optimizer hybrids, have been proposed for estimating Pareto-optimal allocations under various constraints [113–117]. This section synthesizes recent developments, critiques prevalent assumptions, and identifies significant research gaps.
9.2 Metaheuristic and Evolutionary Multi-Objective Algorithms
A number of studies have applied the Multi-Objective Evolutionary Algorithm (MOEA) to MRTA, such as that conducted by Miao et al. [113] by combining two methods, namely Differential Evolution (DE) and Simulated Annealing (SA) in MRTA to find many equivalent optimal solutions, maintain population quality and improve solutions in the final generation. In addition, the Non-dominated Sorting Genetic Algorithm (NSGA) algorithm is used, which is a category of MOEA in solving multi-objective MRTA and route planning problems [115]. In its application, NSGA is assisted by the Lin-Kernighan-Helsgaun (LKH) solver as an efficient sub-tour guide. The combination of NSGA with LKH can help calculate a higher quality Pareto set. There is also the Hybrid Many-Objective Competitive Swarm Optimization (HMaCSO) algorithm which has been proven effective in solving large-scale many-objective MRTA problems, providing better solutions than other algorithms on the IGD metric [116]. By applying the HMaCSO algorithm, it produces an optimal or near-optimal Pareto set, but in this study the focus is more representative in many-objective MRTA.
9.3 Swarm-Based and Bio-Inspired Hybrid Methods
Hybrid approaches that combine cooperative ant-colony and swarm intelligence, including multi-objective Ant Colony Optimization (ACO), PSO hybrids, and K-means & PSO combinations, utilize constructive search alongside local improvement to achieve a balance between exploration and exploitation across multiple objectives [114,118]. Bio-inspired and population-based heuristics, such as Artificial Bee Colony (ABC), Teaching–Learning-Based Optimization (TLBO), and Genetic Algorithms, have been tailored for agricultural, inspection, and assembly MRTA problems [117,119–121]. These approaches exhibit significant robustness and adaptability; however, they frequently suffer from limited explainability and require extensive tuning.
9.4 Centralized and Hybrid Architectures for Constrained Missions
Centralized multi-objective development that optimizes or manages all robots from one central system to balance various objectives such as multiple scheduling to find a balance between work time efficiency and human comfort. Reference [122] presents an application of a genetic algorithm to perform sensing tasks aimed at monitoring the area and assisting firefighters and inspectors during disasters by providing essential measures. Meanwhile, reference [123] presents a dual scheduling strategy for personalized multi-objective optimization of cycle time and fatigue considering recovery in Human-Robot Collaboration (HRC). Moreover, reference [118] combining the K-means++ and PSO algorithms can group tasks and assign them to robots optimally, allowing robots to work more efficiently with minimal travel time and distance.
9.5 Distributed and Dependency-Aware Scheduling Frameworks
Recent frameworks for distributed allocation explicitly consider cross-schedule dependencies and heterogeneous teams, integrating multi-objective assignment with local scheduling constraints [124]. These systems mitigate coordination bottlenecks and improve resilience; however, they necessitate uniform protocols for communication and mechanisms for synchronization to uphold Pareto feasibility among distributed agents.
9.6 Auction and Fuzzy-Threshold Hybrids for Uncertain Environments
Auction-inspired and fuzzy-logic-based methods are becoming more common for dealing with uncertainty and different choices made by humans in situations where multiple robots are working together. These hybrid systems use multi-threshold decision rules to handle uncertain task values and personal trade-offs between different goals [125,126]. While these approaches are more flexible, they often depend on trial-and-error adjustments for parameters and do not offer strong guarantees that the best possible solutions are being reached or that a stable outcome will be achieved.
9.7 Critical Limitations of Current Hybrid MO Approaches
Even though there has been some progress, several common problems and wrong assumptions limit how useful these hybrid methods are for multi-objective robot task allocation:
• High computational cost and limited real-time applicability: Methods based on populations and hybrid models that handle multiple objectives [113,115,116] require a lot of computing power and are not suitable for making quick changes without simplifying the process or using approximate models.
• Static objective formulations: Objectives are often fixed, ignoring dynamic mission priorities such as changing task urgency or energy budgets.
• Scalability: Large-scale MRTA (tens to hundreds of robots/tasks) challenges population-based methods; partitioning strategies are underdeveloped [118].
• Mixed decision spaces: Many algorithms ignore tight coupling between task assignment, motion planning, and scheduling, producing infeasible Pareto solutions [122,124].
• Preference elicitation: Few frameworks incorporate systematic preference learning or explainable selection mechanisms [123,125].
• Benchmarking and reproducibility: Lack of standardized datasets, objective definitions, and metrics hinders cross-study comparability.
• Robustness under uncertainty: Deterministic surrogates dominate, leaving uncertainty-aware optimization underexplored.
9.8 Future Directions and Research Opportunities
To ensure that hybrid and multi-objective strategies are both thoroughly studied and practical for real-world use, several approaches are suggested:
• Real-time and online multi-objective optimization: Develop lightweight or surrogate-assisted MOEAs capable of incremental, anytime operation.
• Hierarchical and decompositional strategies: Employ principled decomposition (spatial or task-based) to retain Pareto quality while scaling to large teams [118,124].
• Mixed discrete–continuous co-optimization: Formulate tightly coupled allocation–motion planning using bilevel or constrained MOEAs [122,124].
• Preference-aware and explainable MO selection: Integrate interactive preference elicitation and explainability metrics for human-supervised MRTA [123,125].
• Many-objective and robust optimization: Extend MRTA to
• Benchmarking and reproducible frameworks: Create standardized MRTA multi-objective benchmarks and normalized evaluation metrics.
• Uncertainty-aware MO optimization: Incorporate stochastic and distributionally-robust optimization to enhance resilience to sensor and communication noise.
• Hybrid RL + MOEAs: Combine RL (for policy adaptation) with MOEAs (for global Pareto exploration) for adaptive and explainable MRTA.
Hybrid and multi-purpose strategies are important for turning MRTA from just ideas into real decision systems that consider many factors. There are many different types of hybrid methods and algorithms that can be used [113–117]; however, connecting the idea of offline Pareto optimization with online, dependable, and preference-based execution is still a big challenge. Improvements in real-time multi-objective optimization, breaking down problems into layers, optimizing both types of variables together, and having consistent benchmarks and ways to measure performance are key for showing how well these systems work in different areas and making sure that improvements can be repeated.
10 Emerging Recent Game-Theoretic and Optimization Trends in MRTA
The previous section discussed the progress and innovations in the MRTA system. These innovations have created a transition in the MRTA system from the old model, which had many weaknesses, to a new model that is able to address the shortcomings of the old model. Currently, the MRTA system has been integrated with intelligent planning supported by machine learning and computational process flexibility. The new system is capable of improving decision-making optimization, which affects the quality of robot performance.
The MRTA problem is one that has never been completely solved, as it is highly dependent on environmental conditions when implemented in real-world cases. Therefore, its framework is constantly being developed, such as in recent research that develops robots’ ability to learn from experience. In addition, the framework is also developed so that robots are able to independently manage tasks and choose their own work. From the results of the research, if robots are able to learn from experience, then they can cooperate with other robots, compete fairly, adapt to changing environments, and collaborate with humans. These capabilities can help improve the effectiveness of task completion and enable the completion of large-scale tasks. Therefore, this section will discuss ideas that have emerged as new research topics and explain the process of integrating machine learning, problem-solving capabilities, and rational decision-making.
In MRTA, it is necessary to integrate various fields of science theoretically. One of them is mathematical theory, such as optimization methods, machine learning, and reasoning processes based on game theory. The results of this study show a transition from the conventional model to a multi-robot model based on real data. This transition is a tool for the system to run effectively despite the uncertainty of various environments [127–148]. These studies demonstrate that auction-based optimization frameworks can attain near-Pareto efficiency while maintaining local autonomy. Table 5 summarizes the main objectives, methods, and results from references [127–141].
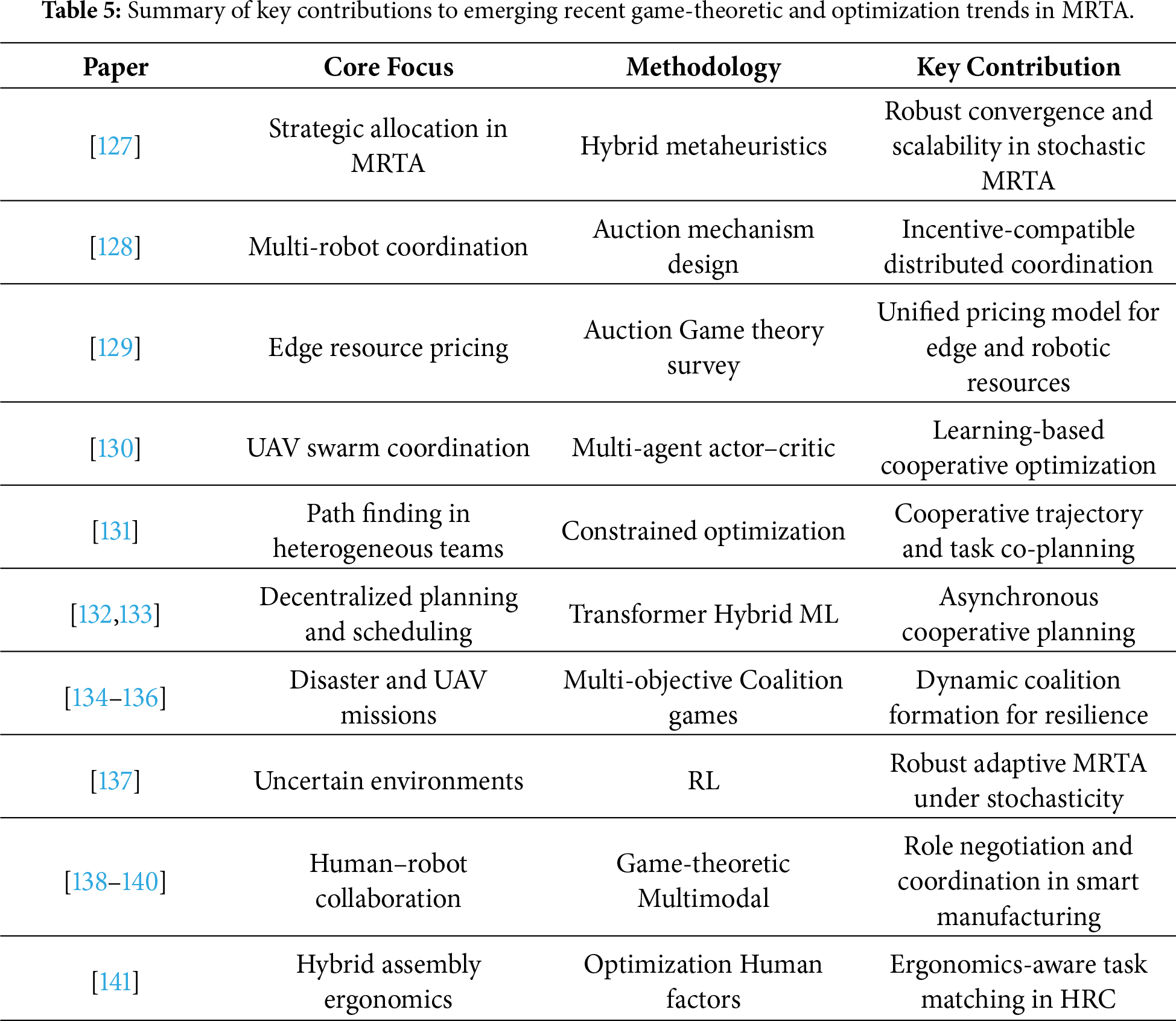
10.1 Strategic Optimization and Auction-Driven Coordination
Similar to the previous explanation, mathematical theory integration is essential in MRTA. One of the most important aspects is the optimization method, which is needed to find the best way to divide tasks among the robot team. Dabass and Sangwan [127] have explored task division among robot teams by combining two metaheuristic optimization methods, namely genetic algorithms and particle swarm optimization. With this method, task distribution is carried out by considering the agreement and suitability of incentives for each robot, in accordance with research conducted by Bererton et al. [128] and Yu et al. [129]. Then, this study further developed in line with the needs in the field. Gao et al. [131] created a navigation system for each robot to work together to solve more complex problems, especially in uncertain and changing environments.
10.2 Learning-Enhanced Game-Theoretic MRTA
In its development process, one of the innovations in MRTA system development is the integration of RL. The study conducted by Alam et al. [130] is an example of the use of RL in MRTA, where in their research, a Deep RL-based framework was able to optimize the allocation of available resources and perform task distribution in a network assisted by unmanned aerial vehicles (UAVs). The study also emphasized that efficient communication and optimal decision-making can improve the quality of the system, especially in complex environments. RL was also used by Farjadnasab and Sirouspour [132], who used the Cooperative and Asynchronous Transformer Based Mission Planning (CatMIP) framework. This framework runs by utilizing multi-agent RL, so that the decisions made are very effective, even though the available robots have different capabilities. Similarly, Huang et al. [137] used RL in allocating robot tasks, presenting the RL-based Task-Allocation and Path-Finding under Uncertainty (RL-TAPU) framework, which is capable of optimally allocating tasks and determining paths for autonomous robots when working in complex environments. From several existing studies, the integration of machine learning such as RL shows the advantages of conventional models, because it is able to realize efficiency and resilience in performing tasks, as well as provide opportunities to solve more complex multi-robot system problems.
Table 6 presents a general summary of various methods that have been developed along with the challenges still faced in MRTA studies.
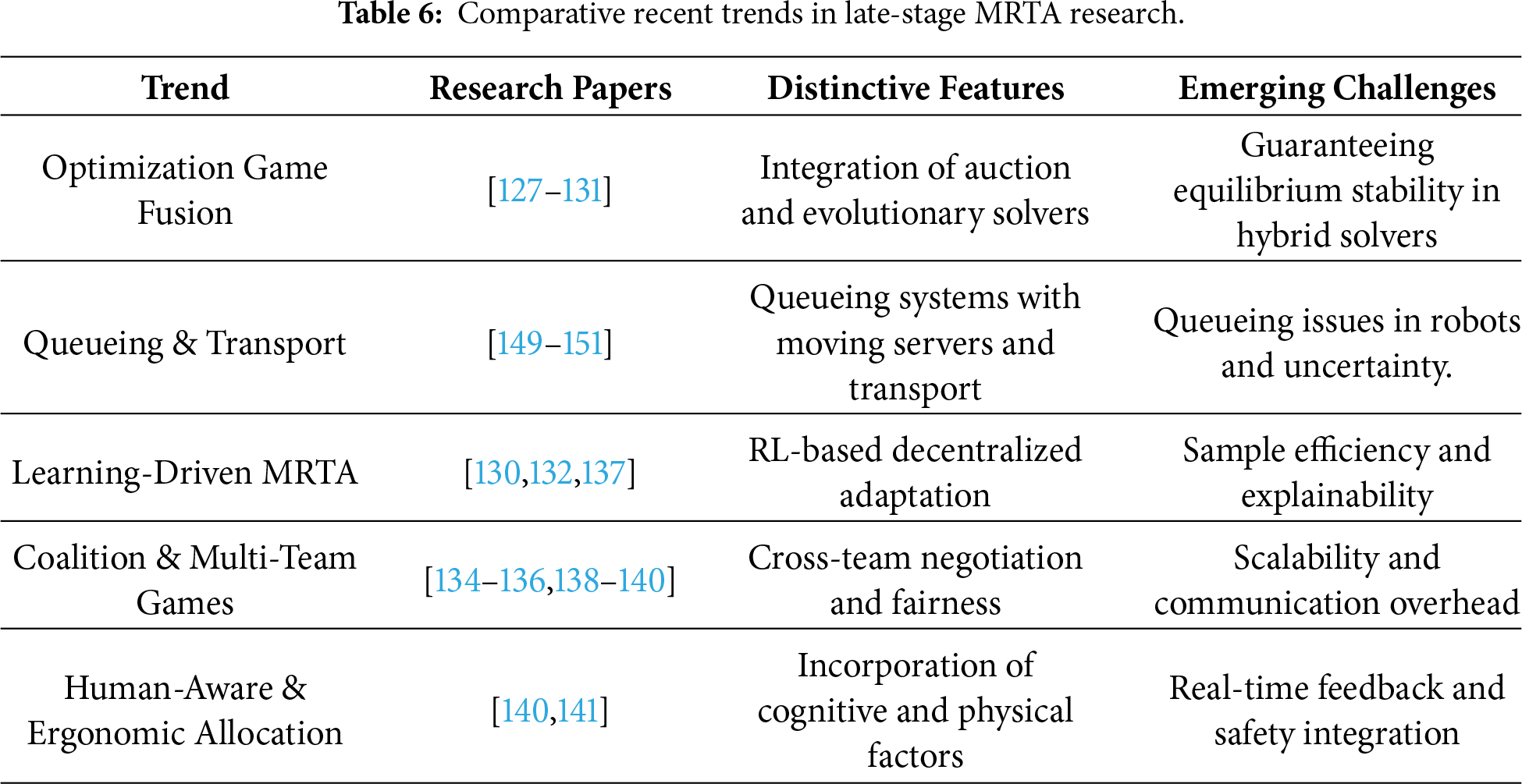
10.3 Coalition Formation, Human Factors, and Multi-Team Interactions
Current MRTA issues increasingly involve coalition and multi-team interactions. One such development is the expansion of coalition-based MRTA controlled by humans. In this case, every element in the system must be ergonomically aware and the human position acts as the center of the system. Kapukaya and Satoglu [134], as well as Zhang et al. [136], investigate dynamic coalition formation in the context of emergencies and UAV security missions. Tong et al. [138], Swanbeck et al. [139], and Chu et al. [140] present game-theoretic frameworks applicable to collaborative manipulators and manufacturing environments, highlighting multimodal interaction and role adaptation. In addition, the development of the MRTA system was also carried out by Cai et al. [141], where in their research they introduced the human-robot collaborative hybrid assembly cell (HRCHAC) model which combines metric ergonomics theory with task suitability values. This development is able to improve the quality of the hybrid method between humans and robots, and is able to maintain productivity and economic efficiency while ensuring safety in the operational process.
Based on the existing discussion, references [127–148] show the development of MRTA research. These references focus on the development of a framework that integrates game theory adaptively, in line with humans, as well as the development of hybrid methods. In these studies, isolated ecosystems develop into interconnected ecosystems, thus capable of learning, negotiation, collaboration, coordination, and producing generally understandable results.
Integrating game theory with advances in LLMs, federated learning, and digital twin technologies shape emerging paradigms in MRTA. These trends signal a transition from classical task-centric MRTA to intelligent, sustainable ecosystems requiring a unified approach to learning and game theory for effective real-world application. In this context, several concrete open problems are highlighted as follows:
• How to embed LLM-based coordination within formally grounded auction, coalition, or evolutionary game models that ensure stability, safety, and energy feasibility.
• How to design federated MRTA mechanisms that balance learning performance, communication overhead, privacy preservation, and energy consumption while maintaining incentive compatibility.
• How to develop digital twins that explicitly model battery aging, energy harvesting uncertainty, and strategic robot behavior for robust MRTA validation.
• How to achieve real-time, large-scale decentralized MRTA under limited energy and communication budgets.
• How to unify learning-based MRTA with game-theoretic guarantees and sustainability-oriented objectives.
This survey has presented a comprehensive and integrative perspective on multi-robot task allocation by examining its evolution across interconnected dimensions, from classical centralized formulations to decentralized, learning-enabled, and energy-aware coordination frameworks. By systematically analyzing architectural paradigms, allocation dynamics, energy constraints, learning mechanisms, and strategic interactions, the survey demonstrates how MRTA has progressed from static optimization problems toward adaptive and context-aware systems capable of operating under uncertainty and resource limitations. The review highlights the critical role of communication structures and coordination mechanisms in determining scalability and robustness, while also revealing persistent trade-offs between optimality, responsiveness, and computational cost.
Several clear take-home insights emerge from this synthesis. Decentralized auction-based and game-theoretic MRTA frameworks currently represent the most reliable and scalable solutions for large robot teams, particularly in settings where robustness and fault tolerance are essential. For energy-constrained and energy-harvesting systems, the most mature approaches are hybrid energy-aware MRTA models that jointly consider task allocation, battery dynamics, and recharging or harvesting processes as part of the decision loop. In highly dynamic and uncertain environments, learning-augmented and hybrid MRTA methods provide superior adaptability and resilience, although this flexibility comes with increased computational and communication demands that must be carefully managed for real-time deployment.
Overall, the survey positions MRTA as a field moving toward holistic coordination paradigms in which decentralization, energy awareness, and strategic decision-making are inseparable design considerations. By synthesizing recent advances across optimization, game theory, and AI, and by identifying gaps related to real-time guarantees, scalability under energy uncertainty, and ethical and human-aware coordination, this work provides a structured foundation for future MRTA research. These insights support the development of next-generation multi-robot systems for applications such as environmental monitoring, autonomous logistics, and long-duration missions, where adaptability, sustainability, and coordinated intelligence are paramount.
Acknowledgement: The authors would like to thank Dr. Fidelis Nofertinus Zai for his valuable assistance during the revision of the manuscript and for his helpful and constructive discussions that improved the clarity and presentation of this work.
Funding Statement: This research was funded by the Scientific and Technological Research Council of Turkiye (TUBITAK) under the 1515 Frontier R&D Laboratories Support Program for BTS Advanced AI Hub: BTS Autonomous Networks and Data Innovation Lab (Grant Nos.: 5239903 and 5169902).
Author Contributions: Ali Hamidoğlu: Conceptualization, formal analysis, investigation, methodology, validation, visualization, writing—original draft, writing—review & editing. Ali Elghirani: Formal analysis, investigation, methodology, validation, writing—original draft. Ömer Melih Gül: Conceptualization, visualization, investigation, methodology, formal analysis, validation, writing—original draft, writing—review & editing. Seifedine Kadry: Conceptualization, methodology, validation, writing—original draft, writing—review & editing. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The complete source code, along with relevant datasets and documentation, is available from the corresponding author upon reasonable request.
Ethics Approval: Ethical approval was not required for this study, as it is based solely on the analysis and synthesis of previously published research and does not involve human subjects, animal experiments, or identifiable personal data.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Gerkey BP, Matarić MJ. A formal analysis and taxonomy of task allocation in multi-robot systems. Int J Robot Res. 2004;23(9):939–54. [Google Scholar]
2. Dias MB, Zlot R, Kalra N, Stentz A. Market-based multirobot coordination: a survey and analysis. Proc IEEE. 2006;94(7):1257–70. [Google Scholar]
3. Farinelli A, Zanotto E, Pagello E. Advanced approaches for multi-robot coordination in logistic scenarios. Robot Auto Syst. 2017;90(9):34–44. doi:10.1016/j.robot.2016.08.010. [Google Scholar] [CrossRef]
4. Gul OM. Energy harvesting and task-aware multi-robot task allocation in robotic wireless sensor networks. Sensors. 2023;23(6):3284. doi:10.3390/s23063284. [Google Scholar] [PubMed] [CrossRef]
5. Wu M, Yeong CF, Su EL, Holderbaum W, Yang C. A review on energy efficiency in autonomous mobile robots. Robot Intell Auto. 2023;43(6):648–68. doi:10.1108/ria-05-2023-0060. [Google Scholar] [CrossRef]
6. Choi JH, Seo DS, Bae SH, An YC, Kim EJ, Pyo JW, et al. A semantic energy-aware ontological framework for adaptive task planning and allocation in intelligent mobile systems. Electronics. 2025;14(18):3647. doi:10.3390/electronics14183647. [Google Scholar] [CrossRef]
7. Liemhetcharat S, Veloso M. Weighted synergy graphs for effective team formation with heterogeneous ad hoc agents. Artifi Intell. 2014;208:41–65. [Google Scholar]
8. Hamidoğlu A, Gul OM, Kadry SN, Jana C, Elghirani A, Gultekin GK. A cost-effective nash-based allocation method for task distribution of multiple robots in distributed robotic networks. Eng Appl Artif Intell. 2025;162(2):112548. doi:10.1016/j.engappai.2025.112548. [Google Scholar] [CrossRef]
9. Hamidoğlu A. Designing discrete-time control-based strategies for pursuit-evasion games on the plane. Optimization. 2025;74(1):239–68. doi:10.1080/02331934.2023.2252840. [Google Scholar] [CrossRef]
10. Hamidoğlu A, Taghiyev M, Weber G. On construction of pursuit-evasion games in discrete control models. Appl Comput Math. 2022;21(1):52–60. doi:10.30546/1683-6154.21.1.2022.52. [Google Scholar] [CrossRef]
11. Beaver L. A Global games-inspired approach to multi-robot task allocation for heterogeneous teams. arXiv:2501.01531. 2025. [Google Scholar]
12. Paul S, Ghassemi P, Chowdhury S. Learning scalable policies over graphs for multi-robot task allocation using capsule attention networks. In: Proceedings of the 2022 International Conference on Robotics and Automation (ICRA); 2022 May 23–27; Philadelphia, PA, USA. p. 8815–22. [Google Scholar]
13. Korsah GA, Stentz A, Dias MB. A comprehensive taxonomy for multi-robot task allocation. Int J Robot Res. 2013;32(12):1495–512. [Google Scholar]
14. Koubaa A, Bennaceur H, Chaari I, Trigui S, Ammar A, Sriti MF, et al. General background on multi-robot task allocation. In: Robot path planning and cooperation: foundations, algorithms and experimentations. Cham, Switzerland: Springer International Publishing; 2018. p. 129–44. [Google Scholar]
15. Öztürk S, Kuzucuoğlu AE. Building a generic simulation model for analyzing the feasibility of multi-robot task allocation (MRTA) problems. In: International Conference on Modelling and Simulation for Autonomous Systems. Cham, Switzerland: Springer International Publishing; 2019. p. 71–87. [Google Scholar]
16. Miloradović B, Papadopoulos AV. A formal definition of the multi-robot multi-task time-extended assignment problem configuration. In: IEEE 21st International Conference on Automation Science and Engineering (CASE) 2025. Piscataway, NJ, USA: IEEE; 2025. p. 2215–22. [Google Scholar]
17. Zitouni F, Maamri R, Harous S. Towards a formal analysis of the multi-robot task allocation problem using set theory. Bull Electr Eng Inf. 2021;10(2):1092–104. doi:10.11591/eei.v10i2.2395. [Google Scholar] [CrossRef]
18. Arkin RC. Behavior-based robotics. Cambridge, MA, USA: MIT press; 1998. [Google Scholar]
19. Zavlanos MM. Distributed control of robotic networks [dissertation]. Philadelphia, PA, USA: University of Pennsylvania; 2008. [Google Scholar]
20. Paul S, Maurer N, Chowdhury S. Bigraph matching weighted with learnt incentive function for multi-robot task allocation. In: 2024 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE; 2024. p. 7250–6. [Google Scholar]
21. Arjun K, Parlevliet D, Wang H, Yazdani A. Optimizing coalition formation strategies for scalable multi-robot task allocation: a comprehensive survey of methods and mechanisms. Robotics. 2025;14(7):93. [Google Scholar]
22. Chapman AC, Micillo RA, Kota R, Jennings NR. Decentralized dynamic task allocation using overlapping potential games. The Comput J. 2010;53(9):1462–77. [Google Scholar]
23. Buckman N, Choi HL, How JP. Partial replanning for decentralized dynamic task allocation. arXiv:1806.04836. 2019. [Google Scholar]
24. Li P, An Z, Abrar S, Zhou L. Large language models for multi-robot systems: a survey. arXiv:2502.03814. 2025. [Google Scholar]
25. Wang H, Ye W, Wang J, Chen W. Breaking the hierarchy: taxonomies and survey on multi-robot integrated task and motion planning. Authorea Preprints. 2025:1–20. doi:10.36227/techrxiv.173933261.11143776/v2. [Google Scholar] [CrossRef]
26. A. KA, Subramaniam U. A systematic literature review on multi-robot task allocation. ACM Comput Surv. 2024;57(3):1–28. doi:10.1145/3700591. [Google Scholar] [CrossRef]
27. Xiong J, Li J, Li J, Kang S, Liu C, Yang C. Probability-tuned market-based allocations for UAV swarms under unreliable observations. IEEE Trans Cyber. 2022;53(11):6803–14. doi:10.1109/tcyb.2022.3162907. [Google Scholar] [PubMed] [CrossRef]
28. Wang J, Zhang T, Ma N, Li Z, Ma H, Meng F, et al. A survey of learning-based robot motion planning. IET Cyber-Syst Robot. 2021;3(4):302–14. doi:10.1049/csy2.12020. [Google Scholar] [CrossRef]
29. Xu Z, Garimella SS, Tzoumas V. Communication-and computation-efficient distributed submodular optimization in robot mesh networks. IEEE Trans Robot. 2025;41:3480–99. doi:10.1109/tro.2025.3567540. [Google Scholar] [CrossRef]
30. Clinch K, Wood TA, Manzie C. Auction algorithm sensitivity for multi-robot task allocation. Automatica. 2023;158(3):111239. doi:10.1016/j.automatica.2023.111239. [Google Scholar] [CrossRef]
31. Sandholm T. Algorithm for optimal winner determination in combinatorial auctions. Artif Intell. 2002;135(1–2):1–54. doi:10.1016/s0004-3702(01)00159-x. [Google Scholar] [CrossRef]
32. Sayın M. Balancing anarchy and efficiency: partial team formations and learning in potential games. Turkish J Elect Eng Comput Sci. 2025;33(1):32–47. doi:10.55730/1300-0632.4112. [Google Scholar] [CrossRef]
33. Liu K, Tang Z, Wang D, Wang Z, Li X, Zhao B. Coherent: collaboration of heterogeneous multi-robot system with large language models. In: 2025 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE; 2025. p. 10208–14. [Google Scholar]
34. Matos DM, Costa P, Sobreira H, Valente A, Lima J. Efficient multi-robot path planning in real environments: a centralized coordination system. Int J Intell Robot Appl. 2025;9(1):217–44. doi:10.1007/s41315-024-00378-3. [Google Scholar] [CrossRef]
35. Andersson S. Control strategies for multi-robot systems in industrial applications. Am J Instrum Control Eng. 2025;6(2):23–33. [Google Scholar]
36. Song Y, Ma Z, Chen N, Zhou S, Srigrarom S. Comparative analysis of centralized and distributed multi-UAV task allocation algorithms: a unified evaluation framework. Drones. 2025;9(8):530. doi:10.3390/drones9080530. [Google Scholar] [CrossRef]
37. Wang S, Li S, Huangfu Y, Qiu Y, Liu Y. Communication-efficient decentralized task allocation for large-scale multi-agent systems. IEEE Robot Auto Lett. 2025;10(10):10074–81. doi:10.1109/lra.2025.3597900. [Google Scholar] [CrossRef]
38. Govoni L, Cristofaro A. A decentralized control and task allocation framework for heterogeneous redundant multiagent systems. IEEE Trans Cyber. 2025;55(12):5605–18. doi:10.1109/tcyb.2025.3594529. [Google Scholar] [PubMed] [CrossRef]
39. Govoni L, Cristofaro A. Decentralized task allocation for redundant multi-robot systems: an iterative consensus approach. In: 2024 IEEE 18th International Conference on Control & Automation (ICCA). Piscataway, NJ, USA: IEEE; 2024. p. 804–9. [Google Scholar]
40. Miele A, Lippi M, Gasparri A. A distributed framework for integrated task allocation and safe coordination in networked multi-robot systems. IEEE Trans Autom Sci Eng. 2025;22(871):11219–38. doi:10.1109/tase.2025.3532023. [Google Scholar] [CrossRef]
41. Huang Y, Kuai J, Cui S, Meng Z, Sun J. Distributed algorithms via saddle-point dynamics for multi-robot task assignment. IEEE Robot Auto Lett. 2024;9(12):11178–85. doi:10.1109/lra.2024.3487077. [Google Scholar] [CrossRef]
42. Peng J, Viswanath H, Bera A. Graph-based decentralized task allocation for multi-robot target localization. IEEE Robot Auto Lett. 2024;9(11):10676–83. doi:10.1109/lra.2024.3475013. [Google Scholar] [CrossRef]
43. Kashid S, Kumat AD. Hierarchically decentralized heterogeneous multi-robot task allocation system. In: 2024 7th International Conference on Intelligent Robotics and Control Engineering (IRCE). Piscataway, NJ, USA: IEEE; 2024. p. 143–8. [Google Scholar]
44. Dai W, Rai U, Chiun J, Yuhong C, Sartoretti G. Heterogeneous multi-robot task allocation and scheduling via reinforcement learning. IEEE Robot Auto Lett. 2025;10(3):2654–61. doi:10.1109/lra.2025.3534682. [Google Scholar] [CrossRef]
45. Guo H, Miao Z, Ji JC, Pan Q. An effective collaboration evolutionary algorithm for multi-robot task allocation and scheduling in a smart farm. Knowl Based Syst. 2024;289(24):111474. doi:10.1016/j.knosys.2024.111474. [Google Scholar] [CrossRef]
46. Guillet V, Grand C, Lesire C, Picard G. Bid intercession to unlock human control in decentralized consensus-based multi-robot task allocation algorithms. In: Workshop on Agents and Robots for reliable Engineered Autonomy. Cham, Switzerland: Springer Nature; 2024. p. 99–114. doi:10.1007/978-3-031-73180-8_7. [Google Scholar] [CrossRef]
47. Jamshidpey A, Wahby M, Allwright M, Zhu W, Dorigo M, Heinrich MK. Centralization vs. decentralization in multi-robot sweep coverage with ground robots and UAVs. Artif Life Robot. 2026;31(1):3–24. doi:10.1007/s10015-025-01049-7. [Google Scholar] [CrossRef]
48. Butler NL, Hollinger GA. Hybrid decentralization for multi-robot orienteering with mothership-passenger systems. In: Proceedings of the 2025 IEEE International Conference on Robotics and Automation (ICRA); 2025 May 19; Atlanta, GA, USA. Piscataway, NJ, USA: IEEE; 2025. p. 6573–9. [Google Scholar]
49. Li W, Shang J, Liu G, Liu Z, Tian G. Multiagent task allocation for dynamic intelligent space: auction and preemption with ontology knowledge graph. IET Cyber-Syst Robot. 2025;7(1):e70013. [Google Scholar]
50. Dong N, Liu S, Mai X. Communication-efficient heterogeneous multi-UAV task allocation based on clustering. Comput Commun. 2025;229(9):107986. doi:10.1016/j.comcom.2024.107986. [Google Scholar] [CrossRef]
51. Li Z, Zhu X, Liu C, Song J, Liu Y, Yin C, et al. Dynamic task scheduling optimization by rolling horizon deep reinforcement learning for distributed satellite system. Expert Syst Appl. 2025;289(12):128350. doi:10.1016/j.eswa.2025.128350. [Google Scholar] [CrossRef]
52. Liberati F, Donsante M, Cirino CM, Tortorelli A. Fast task scheduling with model predictive control integrating a priority-based heuristic. IEEE Access. 2025;13:14499–515. doi:10.1109/access.2025.3529909. [Google Scholar] [CrossRef]
53. Zhang ZG, Mao JX, Tan HR, Wang YN, Zhang XB, Jiang YM. A review of task allocation and motion planning for multi-robot in major equipment manufacturing. Acta Automatica Sinica. 2024;50(1):21–41. [Google Scholar]
54. Arjun K, Parlevliet D, Yazdani A, Wang H. Analyzing multi-robot task allocation and coalition formation methods: a comparative study. In: International Conference on Advanced Robotics, Control, and Artificial Intelligence. Singapore: Springer Nature Singapore; 2024. p. 843–55. [Google Scholar]
55. Arif MU, Haider S. On-line task allocation for multi-robot teams under dynamic scenarios. Intell Decis Technol. 2024;18(2):1053–76. doi:10.3233/idt-230693. [Google Scholar] [CrossRef]
56. Wang G, Zhang G, Zhou X, Zhang Y. Distributed multi-robot task dynamic allocation in digital-twin factory towards industry 5.0. Int J Prod Res. 2025:1–24. doi:10.1080/00207543.2025.2499866. [Google Scholar] [CrossRef]
57. Qiu X, Zhu P, Hu Y, Zeng Z, Lu H. Consensus-based dynamic task allocation for multi-robot system considering payloads consumption. In: 2024 China Automation Congress (CAC). Piscataway, NJ, USA: IEEE; 2024. p. 5294–9. [Google Scholar]
58. Slim M, Daher N, Elhajj IH. Dynamic bandwidth allocation for collaborative multi-robot systems based on task execution measures. J Intell Robot Syst. 2024;110(3):114. doi:10.21236/ada459067. [Google Scholar] [CrossRef]
59. Heppner G, Oberacker D, Roennau A, Dillmann R. Behavior tree capabilities for dynamic multi-robot task allocation with heterogeneous robot teams. In: 2024 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE; 2024. p. 4826–33. [Google Scholar]
60. Bezerra LC, Dos Santos AM, Park S. Learning policies for dynamic coalition formation in multi-robot task allocation. IEEE Robot Autom Lett. 2025;10(9):9216–23. doi:10.1109/lra.2025.3592080. [Google Scholar] [CrossRef]
61. Yuan Z, Wang R, Kim T, Zhao D, Obi I, Min BC. Adaptive task allocation in multi-human multi-robot teams under team heterogeneity and dynamic information uncertainty. In: 2025 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE; 2025. p. 1–7. [Google Scholar]
62. Tuck VM, Chen PW, Fainekos G, Hoxha B, Okamoto H, Sastry SS, et al. SMT-based dynamic multi-robot task allocation. In: NASA Formal Methods Symposium. Cham, Switzerland: Springer Nature; 2024. p. 331–51. [Google Scholar]
63. Choudhury S, Gupta JK, Kochenderfer MJ, Sadigh D, Bohg J. Dynamic multi-robot task allocation under uncertainty and temporal constraints. Autonomous Robots. 2022;46(1):231–47. doi:10.15607/rss.2020.xvi.068. [Google Scholar] [CrossRef]
64. Fazal N, Khan MT, Anwar S, Iqbal J, Khan S. Task allocation in multi-robot system using resource sharing with dynamic threshold approach. PLoS One. 2022;17(5):e0267982. doi:10.1371/journal.pone.0267982. [Google Scholar] [PubMed] [CrossRef]
65. Jin K, Tang P, Chen S, Peng J. Dynamic task allocation in multi-robot system based on a team competition model. Front Neurorobot. 2021;15:674949. doi:10.3389/fnbot.2021.674949. [Google Scholar] [PubMed] [CrossRef]
66. Verma A, Gautam A, Shekhawat VS, Mohan S. Empirical study on multi-robot task allocation under communication range restrictions. IEEE Access. 2025;13(2):171818–30. doi:10.1109/access.2025.3614892. [Google Scholar] [CrossRef]
67. Yan Y, Bi W, Ma G, Zhang A. Collaborative task allocation for large-scale heterogeneous UAV swarm: a hierarchical coalition formation game method. IEEE Internet Things J. 2025;12(14):27237–54. [Google Scholar]
68. Sarkar S, Curado Malta M, Dutta A. A survey on applications of coalition formation in multi-agent systems. Concurr Comput. 2022;34(11):e6876. doi:10.1002/cpe.6876. [Google Scholar] [CrossRef]
69. Zhang L, Liang D, Li M, Yang W, Yang S. Coalition formation game approach for task allocation in heterogeneous multi-robot systems under resource constraints. In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE; 2024. p. 3439–46. [Google Scholar]
70. Mazdin P, Rinner B. Distributed and communication-aware coalition formation and task assignment in multi-robot systems. IEEE Access. 2021;9:35088–100. doi:10.1109/access.2021.3061149. [Google Scholar] [CrossRef]
71. Notomista G, Mayya S, Emam Y, Kroninger C, Bohannon A, Hutchinson S, et al. A resilient and energy-aware task allocation framework for heterogeneous multirobot systems. IEEE Trans Robot. 2021;38(1):159–79. doi:10.1109/tro.2021.3102379. [Google Scholar] [CrossRef]
72. Huo X, Zhang H, Huang C, Wang Z, Yan H. Task allocation with minimum requirements for multiple mobile robot systems: a game-theoretical approach. IEEE Trans Netw Sci Eng. 2023;11(1):1202–13. doi:10.1109/tnse.2023.3321605. [Google Scholar] [CrossRef]
73. Liu L, Li P. Game-theoretic cooperative task allocation for multiple-mobile-robot systems. Vehicles. 2025;7(2):35. doi:10.3390/vehicles7020035. [Google Scholar] [CrossRef]
74. Kalempa VC, Piardi L, Limeira M, de Oliveira AS. Multi-robot preemptive task scheduling with fault recovery: a novel approach to automatic logistics of smart factories. Sensors. 2021;21(19):6536. [Google Scholar] [PubMed]
75. Rudolph M, Chernova S, Ravichandar H. Desperate times call for desperate measures: towards risk-adaptive task allocation. In: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE; 2021. p. 2592–7. [Google Scholar]
76. Gosrich W, Mayya S, Narayan S, Malencia M, Agarwal S, Kumar V. Multi-robot coordination and cooperation with task precedence relationships. arXiv:2209.14417. 2022. [Google Scholar]
77. Duan Y, Huang J, Zhang Z, Deng H. Variable fractional network evolutionary game for distributed resilient task allocation in heterogeneous multi-robot systems. IEEE Trans Intell Transp Syst. 2025;26(8):11515–33. [Google Scholar]
78. Esmat HH, Lorenzo B, Goeckel D. Multi-RAT network slicing for heterogeneous MEC-enabled internet of things. IEEE Netw. 2025:1. doi:10.1109/MNET.2025.3572464. [Google Scholar] [CrossRef]
79. Satouf A, Hamidoğlu A, Gul OM, Kuusik A, Kadry SN, Elghirani A. A survey on task scheduling and optimization techniques for IoT-enabled UAV with Edge/Fog computing. Telecommun Syst. 2025;88(3):89. doi:10.1007/s11235-025-01320-z. [Google Scholar] [CrossRef]
80. Aziz H, Pal A, Pourmiri A, Ramezani F, Sims B. Task allocation using a team of robots. Curr Robot Rep. 2022;3(4):227–38. doi:10.1007/s43154-022-00087-4. [Google Scholar] [CrossRef]
81. Wang H, Kong L, Fang Z, Zou R, Zhang Z, Zhao X, et al. Symbiotic energy paradigm for self-sustaining aerial robots. Nature Rev Elect Eng. 2025;2:302–19. [Google Scholar]
82. Liang Z, He J, Hu C, Pu X, Khani H, Dai L, et al. Next-generation energy harvesting and storage technologies for robots across all scales. Adv Intell Syst. 2023;5(4):2200045. doi:10.1002/aisy.202200045. [Google Scholar] [CrossRef]
83. Bhalerao NV, Mothku SK, Raju MR. 3D AAV deployment for maximizing harvested energy in WRSNs: a soft actor-critic approach. IEEE Internet Things J. 2024;12(9):12083–93. doi:10.1109/jiot.2024.3520604. [Google Scholar] [CrossRef]
84. Mushtaq MU, Venter H, Singh A, Owais M. Advances in energy harvesting for Sustainable wireless sensor networks: challenges and opportunities. Hardware. 2025;3(1):1. doi:10.3390/hardware3010001. [Google Scholar] [CrossRef]
85. Gul OM, Erkmen AM, Kantarci B. NTN-aided quality and energy-aware data collection in time-critical robotic wireless sensor networks. IEEE Internet Things Mag. 2024;7(3):114–20. [Google Scholar]
86. Ito T, Funada R, Sampei M, Notomista G. Energy-aware task allocation for teams of multi-mode robots. arXiv:2503.12787. 2025. [Google Scholar]
87. Shahid H, Uddin E, Abdelkefi A, Latif U, Shah M, Awais M, et al. Effectiveness of energy harvesting systems subjected to flow-induced vibrations in confined spaces. Renew Sustain Energ Rev. 2025;210:115183. doi:10.1016/j.rser.2024.115183. [Google Scholar] [CrossRef]
88. Khan NU, Khan FU, Farina M, Merla A. RF energy harvesters for wireless sensors, state of the art, future prospects and challenges: a review. Phys Eng Sci Med. 2024;47(2):385–401. doi:10.1007/s13246-024-01382-4. [Google Scholar] [PubMed] [CrossRef]
89. Naifar S, Kanoun O, Trigona C. Energy harvesting technologies and applications for the internet of things and wireless sensor networks. Sensors. 2024;24(14):4688. [Google Scholar] [PubMed]
90. Sah DK, Hazra A, Mazumdar N, Amgoth T. An efficient routing awareness based scheduling approach in energy harvesting wireless sensor networks. IEEE Sens J. 2023;23(15):17638–47. doi:10.1109/jsen.2023.3279249. [Google Scholar] [CrossRef]
91. Jalalinejad H, Hajiabadi MR, Hosseinabadi AA, Mirkamali S, Abraham A, Weber GW, et al. A hybrid multi-hop clustering and energy-aware routing protocol for efficient resource management in renewable energy harvesting wireless sensor networks. IEEE Access. 2024;12:137310–32. doi:10.1109/access.2024.3458795. [Google Scholar] [CrossRef]
92. Sheng H, Jun C, Jianqun C, Xiying F, Zhen L. An energy-efficient routing algorithm for dual-energy harvesting-assisted wireless sensor networks based on whale optimization strategy. J Supercomput. 2025;81(1):8. doi:10.1007/s11227-024-06536-5. [Google Scholar] [CrossRef]
93. Hamidoğlu A, Gül ÖM, Gültekin GK, Kadry SN. A novel nash-based matching approach for multirobot task allocation in distributed robotic networks. In: International Conference on Robotics and Networks. Cham, Switzerland: Springer Nature; 2023. p. 3–15. [Google Scholar]
94. Alorainy A, Kouzayha N, ElSawy H, Alouini MS, Al-Naffouri TY. Rate adaptation and power control for IoT networks with ambient energy harvesting: a deep reinforcement learning approach. IEEE Internet Things J. 2025;23(23):49577–93. doi:10.1109/jiot.2025.3606793. [Google Scholar] [CrossRef]
95. Elmadina NN, Saeed RA, Saeid E, Ali ES, Nafea I, Ahmed MA, et al. Double deep RL-based strategy for UAV-assisted energy harvesting optimization in disaster-resilient IoT networks. In: 2024 9th International Conference on Mechatronics Engineering (ICOM). Piscataway, NJ, USA: IEEE; 2024. p. 411–6. [Google Scholar]
96. Xu F, Wang Y, Gulliver TA, Xie Y, Wang C, Jiang R, et al. Finite blocklength relaying communication with unitary beamforming and energy harvesting: fairness oriented design. IEEE Trans Ind Inform. 2026;22(1):463–73. doi:10.1109/tii.2025.3611642. [Google Scholar] [CrossRef]
97. Eris C, Gul OM, Boluk PS. A novel reinforcement learning based routing algorithm for energy management in networks. J Ind Manag Optim. 2024;20(12):3678–96. doi:10.3934/jimo.2024049. [Google Scholar] [CrossRef]
98. Islam A, Ghose M. GSAgri: green and secure agriculture through efficient task offloading and scheduling under IoT-enabled energy-harvesting multi-access edge computing framework. Expert Syst Appl. 2025;284:127814. [Google Scholar]
99. Qiu H, Yu W, Zhang G, Xia X, Yao K. Multi-robot collaborative 3D path planning based on game theory and particle swarm optimization hybrid method. J Supercomput. 2025;81(3):487. doi:10.21203/rs.3.rs-7901235/v1. [Google Scholar] [CrossRef]
100. Chen S, Lin TX, Zhang F. Game-theoretical approach to multi-robot task allocation using a bio-inspired optimization strategy. In: Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2023 Oct 1; Detroit, MI, USA. Piscataway, NJ, USA: IEEE; 2023. p. 5388–93. [Google Scholar]
101. Sheng Y, Wang Y, Cheng H, Zhao H, Ding H. Human-like robot action policy through game-theoretic intent inference for human-robot collaboration. IEEE Trans Robot. 2025;41:5411–30. doi:10.1109/tro.2025.3603556. [Google Scholar] [CrossRef]
102. Han L, Zhang J, Wang H. Shared control in pHRI: integrating local trajectory replanning and cooperative game theory. IEEE Trans Robot. 2025;41:1263–77. [Google Scholar]
103. Franceschi P, Cassinelli D, Pedrocchi N, Beschi M, Rocco P. Design of an assistive controller for physical human-robot interaction based on cooperative game theory and human intention estimation. IEEE Trans Autom Sci Eng. 2025;22(2):5741–56. doi:10.1109/tase.2024.3429643. [Google Scholar] [CrossRef]
104. Gul OM, Hamidoğlu A, Khan MK, Yu S. Novel game theoretical approach in blockchain aided communication at internet of drones. IEEE Consum Electron Mag. 2025;14(6):88–99. doi:10.1109/mce.2025.3530103. [Google Scholar] [CrossRef]
105. Galati G, Usai A, Vignolo G, Macrì S, Rizzo A. A game of social forces: integrating non-cooperative game theory with social force model for a socially-acceptable mobile robot navigation. J Intell Robot Syst. 2025;111(4):110. [Google Scholar]
106. Le VA, Tadiparthi V, Chalaki B, Mahjoub HN, D’sa J, Moradi-Pari E, et al. Multi-robot cooperative navigation in crowds: a game-theoretic learning-based model predictive control approach. In: 2024 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE; 2024. p. 4834–40. [Google Scholar]
107. Gao T, Bhattacharya S. Multirobot charging strategies: a game-theoretic approach. IEEE Robot Autom Lett. 2019;4(3):2823–30. [Google Scholar]
108. Fang Q, Zhang J, Wang C, Xie G, Zhang C. Decentralized game-based auction algorithm for scheduling robotic chargers to service EVs with uncertain demands. IEEE Trans Intell Veh. 2025;10(2):886–99. doi:10.1109/tiv.2024.3419183. [Google Scholar] [CrossRef]
109. Beaver LE. Multi-robot task allocation using global games with negative feedback: the colony maintenance problem. Proc AAAI Conf Artif Intell. 2025;39(13):13597–604. doi:10.1609/aaai.v39i13.33485. [Google Scholar] [CrossRef]
110. Sun Y, Han Y. Analyzing the impact of information asymmetry on strategy adaptation in swarm robotics: a game-theoretic approach. Symmetry. 2025;17(2):248. doi:10.3390/sym17020248. [Google Scholar] [CrossRef]
111. Hu Z, Li X, Meng M, Zhao S. A game theoretic method for two-team multi-player autonomous racing. IEEE Robot Autom Lett. 2024;9(9):7581–8. doi:10.1109/lra.2024.3428128. [Google Scholar] [CrossRef]
112. Wu H, Deng H, Li J, Luo H. Research on task collaboration over heterogeneous networks based on evolutionary game theory. In: 2024 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Piscataway, NJ, USA: IEEE; 2024. p. 4472–9. [Google Scholar]
113. Miao Z, Huang W, Jiang Q, Fan Q. A novel multimodal multi-objective optimization algorithm for multi-robot task allocation. Trans Inst Meas Control. 2025;47(12):2564–75. doi:10.1177/01423312231183588. [Google Scholar] [CrossRef]
114. Wang S, Liu Y, Qiu Y, Zhang Q, Huo F, Huangfu Y, et al. Cooperative task allocation for multi-robot systems based on multi-objective ant colony system. IEEE Access. 2022;10(5):56375–87. doi:10.1109/access.2022.3165198. [Google Scholar] [CrossRef]
115. Zhang Z, Ma S, Jiang X. Research on multi-objective multi-robot task allocation by Lin-Kernighan–Helsgaun guided evolutionary algorithms. Mathematics. 2022;10(24):4714. doi:10.3390/math10244714. [Google Scholar] [CrossRef]
116. Xue F, Dong T, You S, Liu Y, Tang H, Chen L, et al. A hybrid many-objective competitive swarm optimization algorithm for large-scale multirobot task allocation problem. Int J Mach Learn Cyber. 2021;12(4):943–57. doi:10.1007/s13042-020-01213-4. [Google Scholar] [CrossRef]
117. Dai LL, Pan QK, Miao ZH, Suganthan PN, Gao KZ. Multi-objective multi-picking-robot task allocation: mathematical model and discrete artificial bee colony algorithm. IEEE Trans Intell Transp Syst. 2023 Dec 1;25(6):6061–73. [Google Scholar]
118. Yuan Y, Yang P, Jiang H, Shi T. A multi-robot task allocation method based on the synergy of the K-means++ algorithm and the particle swarm algorithm. Biomimetics. 2024;9(11):694. [Google Scholar] [PubMed]
119. Kang N, Miao Z, Pan QK, Li W, Tasgetiren MF. Multi-objective teaching-learning-based optimizer for a multi-weeding robot task assignment problem. Tsinghua Sci Technol. 2024;29(5):1249–65. doi:10.26599/tst.2023.9010075. [Google Scholar] [CrossRef]
120. Nait Chabane A, Guenounou O. An enhanced genetic algorithm for optimized task allocation and planning in heterogeneous multi-robot systems. Compl Intell Syst. 2025;11(10):1–26. doi:10.1007/s40747-025-02062-w. [Google Scholar] [CrossRef]
121. Majumder A, Majumder A, Bhaumik R. Teaching-learning-based optimization algorithm for path planning and task allocation in multi-robot plant inspection system. Arab J Sci Eng. 2021;46(9):8999–9021. doi:10.1007/s13369-021-05710-8. [Google Scholar] [CrossRef]
122. Chakraa H, Leclercq E, Guérin F, Lefebvre D. A centralized task allocation algorithm for a multi-robot inspection mission with sensing specifications. IEEE Access. 2023;11(1):99935–49. doi:10.1109/access.2023.3315130. [Google Scholar] [CrossRef]
123. Chand S, Lu Y. Dual task scheduling strategy for personalized multi-objective optimization of cycle time and fatigue in human-robot collaboration. Manuf Lett. 2023;35(2):88–95. doi:10.1016/j.mfglet.2023.08.064. [Google Scholar] [CrossRef]
124. Ferreira BA, Petrović T, Orsag M, Martínez-de Dios JR, Bogdan S. Distributed allocation and scheduling of tasks with cross-schedule dependencies for heterogeneous multi-robot teams. IEEE Access. 2024;12:74327–42. doi:10.1109/access.2024.3404823. [Google Scholar] [CrossRef]
125. Alshaboti M, Baroudi U. Multi-robot task allocation system: fuzzy auction-based and adaptive multi-threshold approaches. SN Comput Sci. 2021;2(2):87. [Google Scholar]
126. Alitappeh RJ, Jeddisaravi K. Multi-robot exploration in task allocation problem. Appl Intell. 2022;52(2):2189–211. doi:10.1007/s10489-021-02483-3. [Google Scholar] [CrossRef]
127. Dabass V, Sangwan S. Strategic allocation: exploring optimization techniques in multi-robot systems. Int J Intell Robot Appl. 2025;9(4):1279–301. doi:10.1007/s41315-025-00436-4. [Google Scholar] [CrossRef]
128. Bererton C, Gordon GJ, Thrun S. Auction mechanism design for multi-robot coordination. In: Advances in neural information processing systems. Vol. 16. Cambridge, MA, USA: MIT Press; 2003. [Google Scholar]
129. Yu J, Liu S, Zou Y, Wang G, Hu C. Auction theory and game theory based pricing of edge computing resources: a survey. IEEE Internet Things J. 2025;12(16):32394–18. doi:10.1109/jiot.2025.3565539. [Google Scholar] [CrossRef]
130. Alam MM, Trina SA, Hossain T, Mahmood S, Ahmed MS, Arafat MY. Variations in multi-agent actor-critic frameworks for joint optimizations in UAV swarm networks: recent evolution, challenges, and directions. Drones. 2025;9(2):153. doi:10.3390/drones9020153. [Google Scholar] [CrossRef]
131. Gao J, Li Y, Mu Y, Liu Q, Chen H, Lou Y. CBTMP: optimizing multi-agent path finding in heterogeneous cooperative environments. IEEE Robot Autom Lett. 2025;10(5):5010–7. [Google Scholar]
132. Farjadnasab M, Sirouspour S. Cooperative and asynchronous transformer-based mission planning for heterogeneous teams of mobile robots. Robot Auton Syst. 2025;194(4):105131. doi:10.1016/j.robot.2025.105131. [Google Scholar] [CrossRef]
133. Khan A, Ullah F, Shah D, Khan MH, Ali S, Tahir M. EcoTaskSched: a hybrid machine learning approach for energy-efficient task scheduling in IoT-based fog-cloud environments. Sci Rep. 2025;15(1):12296. doi:10.1038/s41598-025-96974-9. [Google Scholar] [PubMed] [CrossRef]
134. Kapukaya EN, Satoglu SI. A multi-objective dynamic resource allocation model for search and rescue and first aid tasks in disaster response by employing volunteers. Logistics. 2025;9(1):41. doi:10.3390/logistics9010041. [Google Scholar] [CrossRef]
135. Wu S, Liu X, Wang X, Zhou X, Sun M. Multi-robot dynamic task allocation based on improved auction algorithm. In: 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE). Piscataway, NJ, USA: IEEE; 2021. p. 57–61. [Google Scholar]
136. Zhang Y, Gao X, Ye N, Niyato D, Han Z, Yang K. Joint UAV deployment, power allocation, and coalition formation for physical layer security in heterogeneous networks. IEEE Trans Vehicular Technol. 2025;74(7):10994–1009. [Google Scholar]
137. Huang S, Sun C, Gong J, Pompili D. Reinforcement learning-based task allocation and path-finding in multi-robot systems under environment uncertainty. Comput-Aided Civ Infrastruct Eng. 2025;40(22):3408–29. doi:10.1111/mice.13535. [Google Scholar] [CrossRef]
138. Tong Y, Liu H, Yang T, Zhang Z. A game theory perspective for multi-manipulators with unknown kinematics. IEEE Trans Cogn Dev Syst. 2026;18(1):167–85. doi:10.1109/tcds.2025.3575530. [Google Scholar] [CrossRef]
139. Swanbeck S, Meza DI, Rosenbaum J, Fridovich-Keil D, Pryor M. Gators: a game-theoretic tool for optimal robot selection and design in surface coverage applications. In: 2025 22nd International Conference on Ubiquitous Robots (UR). Piscataway, NJ, USA: IEEE; 2025. p. 477–83. [Google Scholar]
140. Chu D, Yu S, Ling Y, Zhao Y, Zhang J. A game-theoretic and multimodal interaction framework for collaborative robots in smart manufacturing. Decis Mak Appl Manag Eng. 2025;8(2):36–52. doi:10.1109/iecon.2018.8591479. [Google Scholar] [CrossRef]
141. Cai M, Liang R, Luo X, Liu C. Task allocation strategies considering task matching and ergonomics in the human-robot collaborative hybrid assembly cell. Int J Prod Res. 2023;61(21):7213–32. doi:10.1080/00207543.2022.2147234. [Google Scholar] [CrossRef]
142. Martin JG, Frejo JR, García RA, Camacho EF. Multi-robot task allocation problem with multiple nonlinear criteria using branch and bound and genetic algorithms. Intell Serv Robot. 2021;14(5):707–27. doi:10.1007/s11370-021-00393-4. [Google Scholar] [CrossRef]
143. Toth P, Vigo D. Vehicle routing: problems, methods, and applications. 2nd ed. Philadelphia, PA, USA: Society; 2014. [Google Scholar]
144. Wang G, Han H, Liu X, Jiang H, Zhang M. A group consensus-driven auction algorithm for cooperative task allocation among heterogeneous multi-agents. arXiv:2508.02015. 2025. [Google Scholar]
145. Mahato P, Saha S, Sarkar C, Shaghil M. Consensus-based fast and energy-efficient multi-robot task allocation. Robot Auton Syst. 2023;159(2):104270. doi:10.1016/j.robot.2022.104270. [Google Scholar] [CrossRef]
146. Shao M, Li W, Lin M, Li Y. Multi-vehicle task allocation based on priority consensus-based bundle algorithm. J Supercomput. 2025;81(15):1385. doi:10.1007/s11227-025-07754-1. [Google Scholar] [CrossRef]
147. Verma A, Gautam A, Shekhawat VS, Mohan S. DTA-HMR-TT: dynamic task allocation for a heterogeneous team of mobile robots with task transfer. IEEE Access. 2024;2024(12):177050–63. doi:10.1109/access.2024.3505947. [Google Scholar] [CrossRef]
148. Yan F, Wang F, Chu J, Xu Z. Heterogeneous multi-agent overlapping coalition formation method under resource constraints. In: Proceedings of 4th 2024 International Conference on Autonomous Unmanned Systems (4th ICAUS 2024). Singapore: Springer Nature; 2025. p. 70–7. [Google Scholar]
149. Belyaev Y, Hajiyev A. Queueing systems with moving servers: theory, methods, and applications. Boca Raton, FL, USA: CRC Press; 2025. doi:10.1201/9781003679097. [Google Scholar] [CrossRef]
150. Lenagh W, Dasgupta P, Munoz-Melendez A. A spatial queuing-based algorithm for multi-robot task allocation. Robotics. 2015;4(3):316–40. doi:10.3390/robotics4030316. [Google Scholar] [CrossRef]
151. Shan X, Jin Y, Jurt M, Li P. A distributed multi-robot task allocation method for time-constrained dynamic collective transport. Robot Auton Syst. 2024;178(1):104722. doi:10.1016/j.robot.2024.104722. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools