
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Efficient Gait Phase Estimation and Trajectory Prediction in Wearable Devices Using a Dual-Stage Approach
1 School of Information Science and Engineering, Lanzhou University, Lanzhou, China
2 School of Computer Science and Technology, University of Science and Technology of China, Hefei, China
3 SIGS, Tsinghua University, Beijing, China
* Corresponding Authors: Xingjun Wang. Email: ; Yifan Liu. Email:
(This article belongs to the Special Issue: Advances in Computational Approaches to Action and Movement Analysis)
Computers, Materials & Continua 2026, 87(3), 85 https://doi.org/10.32604/cmc.2026.077791
Received 17 December 2025; Accepted 26 February 2026; Issue published 09 April 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This paper presents a novel dual-stage approach for efficient gait phase recognition and trajectory prediction, tailored for the operation of wearable devices such as exoskeletons. By leveraging dynamic template matching techniques and addressing their computational challenges, we propose an innovative algorithm that significantly enhances both prediction accuracy and computational efficiency. The approach integrates Dynamic Time Warping-KMeans (DTW-KM) template selection in the offline phase and a Soft Constraint Weighted (SCW) template matching technique in the online phase. In the offline stage, the DTW-KM method extracts diverse and generalizable gait patterns from a database, establishing a robust set of templates for future gait recognition. The online stage then adapts to real-time gait dynamics using the SCW method, which incorporates soft constraints and quadratic weighting to improve prediction stability and adaptability to individual gait variations. Preliminary results demonstrate that the algorithm achieves stable gait phase predictions within 0.5–1 s intervals with high efficiency on embedded systems. The dual-stage framework not only ensures scalable and real-time gait prediction performance across varying speeds and conditions but also provides a solid foundation for the deployment of wearable technology in dynamic environments.Keywords
Wearable devices, particularly exoskeletons, are increasingly recognized for their potential to assist individuals with mobility impairments or those facing physically demanding tasks [1]. These devices offer critical support in enhancing motor functions by amplifying or assisting user movements. However, their efficacy heavily depends on the ability to synchronize seamlessly with the user’s natural gait [2], a challenge that requires precise estimation of gait phases [3] and accurate prediction of movement [4]. The accurate and timely delivery of assistance is crucial not only for ensuring the device’s effectiveness but also for optimizing user comfort, minimizing energy consumption, and safeguarding user well-being.
A fundamental challenge in the development of wearable exoskeletons lies in the gap between the real-time dynamics of human gait and the assistive actions of the device. Gait phase estimation and trajectory prediction need to occur with minimal delay to ensure that the exoskeleton’s movements align with the user’s natural rhythm [5]. Any delay in signal processing can lead to a mismatch, increasing physical strain on the user and compromising both the functionality and safety of the device [6]. Existing solutions in this domain often struggle with latency, impacting the precision and responsiveness of the system. Furthermore, gait analysis algorithms can impose substantial computational burdens when advanced techniques such as deep learning are employed, which may limit their practical deployment for real-time operation on resource-constrained embedded hardware [7] commonly used in wearable devices.
To address these concerns, a robust gait trajectory prediction system for wearable technologies must fulfill three primary requirements: low latency [8], high accuracy [9], and computational efficiency [10]. Low-latency systems are essential for real-time assistance delivery, while high prediction precision ensures that the device’s movements are in sync with the user’s gait, reducing both fatigue and the risk of injury [11]. Computational efficiency is critical, as wearable devices often operate with limited memory and processing power, necessitating lightweight algorithms that can still deliver reliable performance.
Despite advancements in sensor technology and algorithmic design [12], several challenges persist in current systems for gait phase estimation [13] and trajectory prediction [14]. First, most existing methods struggle with dynamic scenario adaptability [15]. These approaches often rely on fixed gait templates, which fail to capture the variability in human gait across different walking conditions, such as changes in walking speed or variations in terrain. Second, individual gait variations introduce another layer of complexity [16]. Traditional template matching techniques are not sufficiently flexible to accommodate the unique gait patterns of different users, leading to inconsistencies and reduced prediction accuracy. Finally, the embedded resource constraints of wearable devices impose additional limitations on the use of complex [17], high-precision models, necessitating innovative solutions that balance algorithmic complexity with real-time operational demands.
This paper proposes a novel dual-stage framework for gait phase estimation and trajectory prediction, aimed at overcoming these challenges while maintaining the practical viability of wearable exoskeletons. The proposed framework divides the gait prediction process into two distinct phases: offline learning and online prediction. The offline learning phase focuses on extracting generalized gait templates from a large-scale gait dataset, while the online prediction phase ensures real-time adaptation to individual gait patterns and dynamic walking conditions. By combining offline template extraction with real-time prediction adjustments, this framework enhances both the accuracy and efficiency of gait prediction, making it suitable for resource-limited wearable systems.
Through this dual-stage approach, the system is able to deliver high-precision gait predictions that are responsive to real-time changes in gait, even under varying walking conditions. Furthermore, the method’s lightweight design ensures that it can be deployed on embedded devices without compromising performance. The schematic diagram of this dual-branch framework is shown in Fig. 1, which outlines the offline learning and online prediction components. In the offline phase, generalized gait templates are extracted using DTW and K-means clustering, while the online phase focuses on real-time matching and adaptation through SCW. This combination allows the system to bridge the gap between offline generalization and real-time precision, ensuring both scalability and practicality for wearable devices.
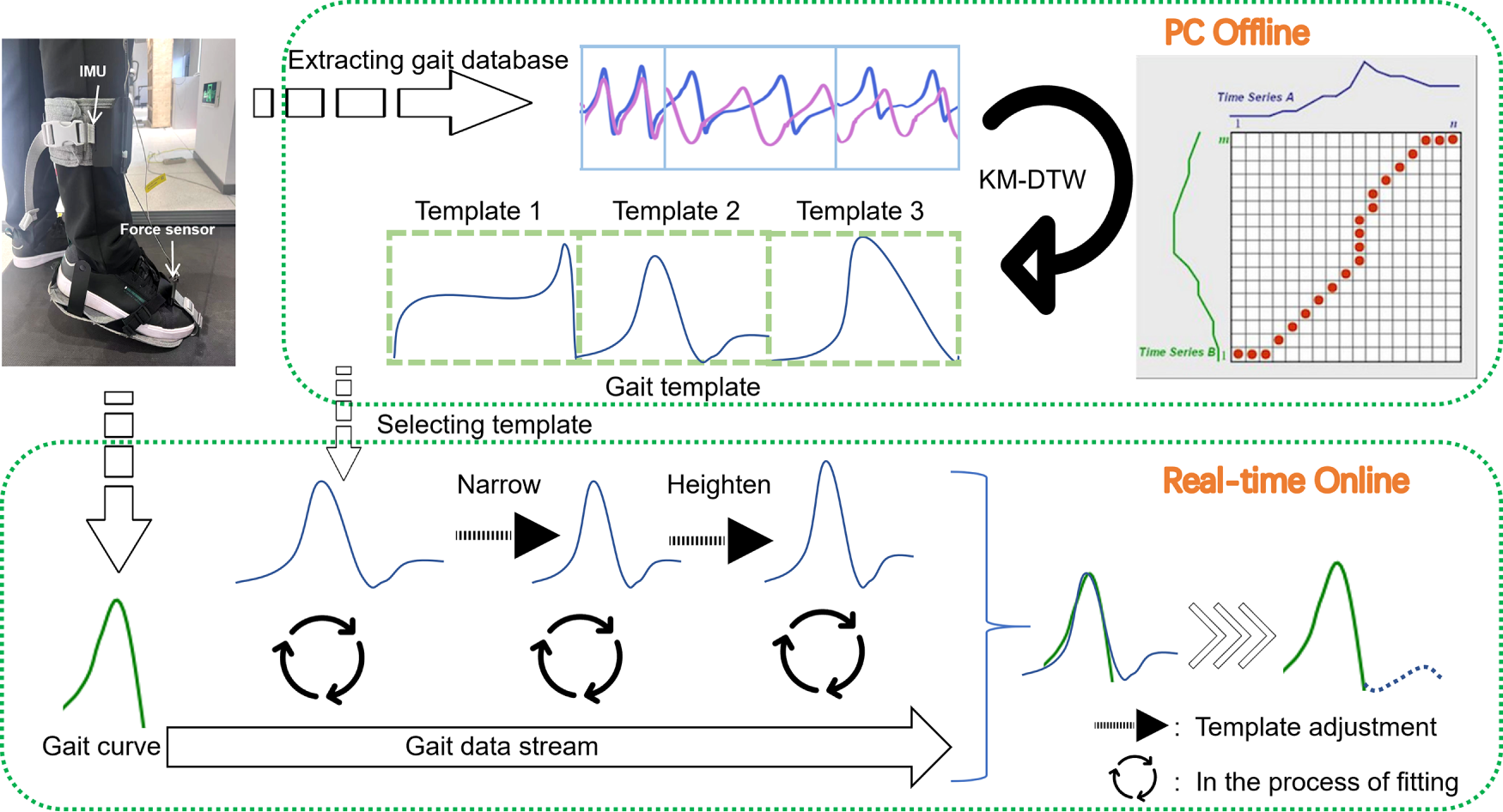
Figure 1: Schematic diagram of the dual-branch framework for offline learning and online prediction in embedded software.
Unlike studies that focus on the mechanical design of ankle exoskeletons, this work targets the control-layer problem of gait phase estimation and trajectory prediction. In particular, the proposed framework is designed to cope with gait irregularities commonly observed in hemiparetic patients, such as phase asymmetry, variable stride duration, and local gait abnormalities. By combining DTW-based offline template learning with soft-constrained online adaptation, the proposed method relaxes the common assumptions of gait periodicity and symmetry, making it more suitable for ankle exoskeleton control in impaired gait scenarios.
This work offers a scalable and effective solution to the challenges of gait prediction in wearable technologies, laying the groundwork for the next generation of intelligent exoskeletons that can seamlessly integrate with their users’ natural movement dynamics.
Key Contributions:
1. A dual-stage gait prediction framework that separates the complex tasks of offline learning and online prediction, optimizing for both precision and efficiency.
2. Real-time adaptation mechanism that addresses latency and individual variability by employing soft constraint weights and quadratic loss functions, ensuring stable and accurate predictions.
3. Lightweight design suitable for embedded hardware that maintains high prediction accuracy while being computationally efficient for wearable devices.
Human-exoskeleton interaction has become a major research focus in wearable robotics, particularly for lower-limb exoskeletons designed to assist or rehabilitate gait. Accurate gait phase recognition and motion prediction are essential for achieving effective, safe, and comfortable assistance. Existing studies related to this work can be broadly categorized into event-based gait phase detection, learning-based gait prediction methods, bio-inspired gait generation approaches, and multimodal human-exoskeleton cooperative control strategies.
2.1 Event-Based Gait Phase Detection Methods
Early gait phase recognition methods for wearable exoskeletons mainly relied on event detection, such as heel-strike and toe-off, using foot switches, pressure insoles, or kinematic thresholds. These approaches are computationally efficient and easy to implement, making them suitable for real-time control.
However, event-based methods inherently provide discrete gait state transitions, which may lead to abrupt changes in control commands. This limitation can reduce control smoothness and negatively affect human-exoskeleton interaction, especially during speed transitions or irregular gait patterns. Moreover, these methods are sensitive to sensor noise and may suffer from reduced robustness in pathological gait conditions.
2.2 Learning-Based Gait Phase and Trajectory Prediction
With advances in machine learning, various data-driven approaches have been proposed for gait phase estimation and trajectory prediction. Neural networks such as artificial neural networks (ANNs), support vector machines (SVMs), and especially long short-term memory (LSTM) networks [18] have been widely adopted due to their ability to model temporal dependencies in gait signals.
Learning-based methods have demonstrated high prediction accuracy and adaptability across different walking speeds and subjects. Some studies have extended these approaches to continuous gait phase estimation and short-term trajectory forecasting for exoskeleton control. Nevertheless, these methods typically require large training datasets and involve considerable computational complexity. Their real-time performance on embedded systems commonly used in wearable exoskeletons remains a challenge, and model generalization to unseen gait patterns or impaired users is still an open issue.
2.3 Bio-Inspired Gait Generation Based on Central Pattern Generators
Bio-inspired control strategies based on central pattern generators (CPGs) [19] have also been extensively studied for gait planning [20] and lower-limb exoskeleton control. CPG-based approaches generate rhythmic joint trajectories using coupled nonlinear oscillators [21], enabling smooth and continuous motion patterns.
These methods offer advantages in terms of biological plausibility and motion continuity. However, CPG-based gait generation often relies on predefined oscillatory structures and parameter tuning. Adapting such models to irregular, asymmetric, or pathological gait—common in rehabilitation scenarios—can be challenging and may require additional adaptive or supervisory mechanisms.
2.4 Multimodal Human–Exoskeleton Cooperative Control
More recently, research has shifted toward multimodal human-exoskeleton cooperative control frameworks [22], which integrate multiple wearable sensors such as inertial measurement units (IMUs) [23], force sensors [24], plantar pressure sensors, and electromyography (EMG). These systems typically adopt a hierarchical or multi-level control architecture, where high-level intent or gait state estimation informs low-level joint control.
While multimodal approaches enhance robustness and adaptability, they also increase system complexity, sensor requirements, and computational burden. In practical wearable exoskeleton applications, especially ankle exoskeletons, minimizing sensor dependency and computational cost remains an important consideration.
2.5 Positioning of the Present Work
Different from system-level cooperative control strategies or learning-intensive prediction models, this paper focuses on a lightweight and real-time gait phase recognition and trajectory prediction framework for ankle exoskeletons. By employing a dual-stage approach based on DTW and short-term trajectory prediction, the proposed method achieves continuous gait phase estimation without requiring extensive training or multimodal sensing.
The proposed approach is complementary to existing multimodal or hierarchical control frameworks and can serve as a reliable perception and prediction module for practical ankle exoskeleton systems, particularly under real-time and embedded hardware constraints.
3 DTW-KM Template Selection Method
The DTW and KM template selection method, as depicted in Fig. 2, combines the temporal alignment capability of DTW with the clustering strength of K-Means to extract representative gait cycle templates from gait data. This method is sensitive to disparities in walking conditions, such as changes in walking speed and terrain, and is able to accommodate the variability of individual gait patterns. By merging these two techniques, DTW-KM effectively captures the dynamic nature of human gait while providing a robust mechanism to identify key gait patterns in diverse walking scenarios.
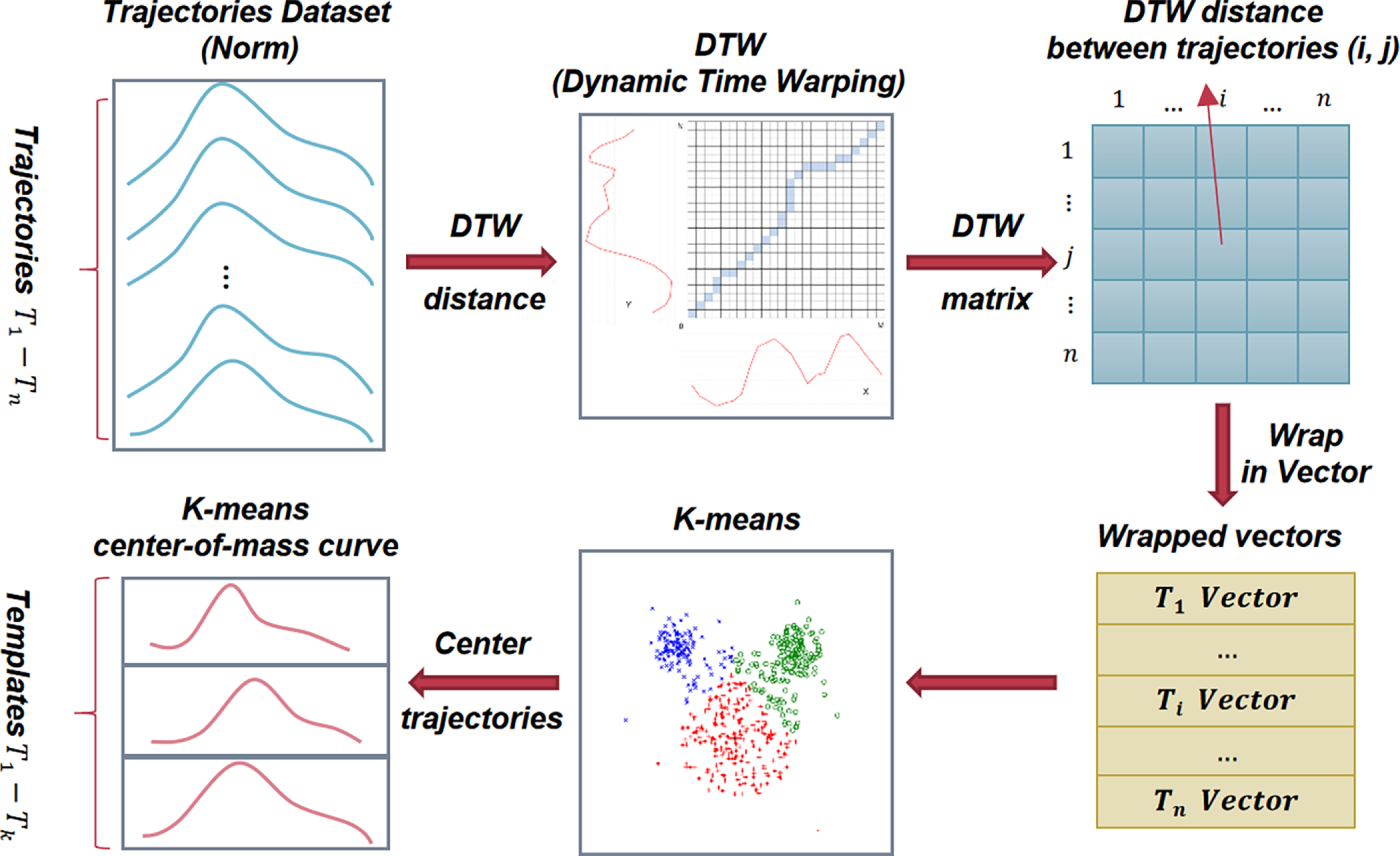
Figure 2: Overview of the DTW-KM template selection method.
The process begins by segmenting the raw gait data into discrete gait cycles, resulting in a gait database denoted
Next, DTW is employed to compute the distance
Importantly, this distance is normalized to ensure that differences in duration and speed across gait cycles do not distort the measurement.
Each row of this distance matrix,
To identify key gait patterns within this high-dimensional space, K-means clustering is applied to the set of vectors
The K-Means clustering objective is mathematically expressed as
where
For each cluster
where
Although cluster centroids are used internally during the DTW-KMeans clustering process, DTW distances are computed only between time series. Therefore, the final gait template for each cluster is selected as a medoid rather than the centroid, ensuring that all DTW distance computations are mathematically well-defined.
In this equation,
The final set of representative templates is denoted as
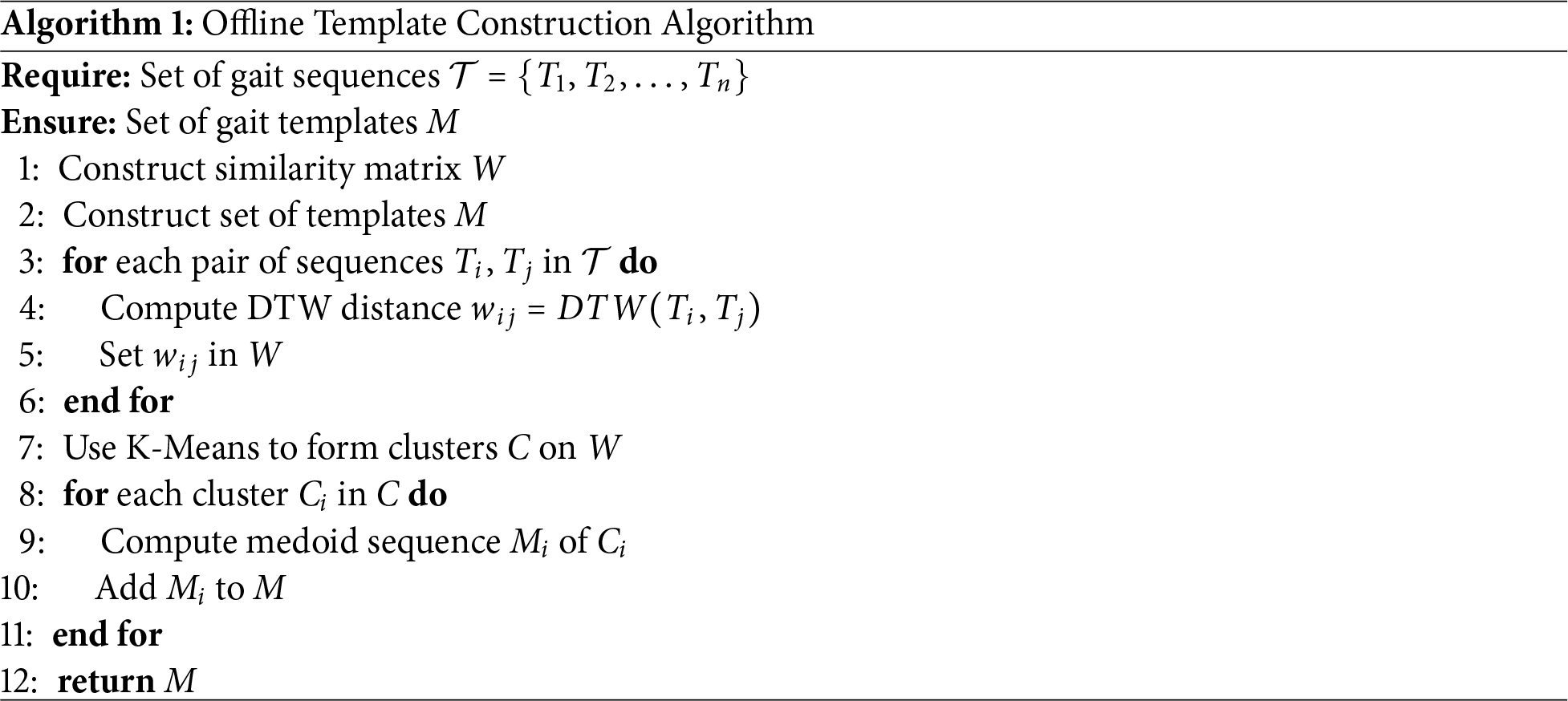
The pseudocode for the DTW-KM template selection method is outlined in Algorithm 1. The algorithm describes the step-by-step procedure for segmenting the gait data, computing the DTW distances, performing the K-Means clustering, and selecting the representative gait templates. This method effectively handles the temporal dynamics of gait data, providing a set of templates that are not only temporally aligned but also clustered in a meaningful way.
In summary, the DTW-KM method offers an effective solution for extracting representative gait templates from diverse gait data. By combining the temporal alignment of DTW with the data clustering of K-Means, the method addresses the complexities of gait variability across different walking conditions and individual users. The resulting templates provide a valuable foundation for real-time gait analysis and prediction, supporting the development of more adaptive and accurate wearable exoskeletons and other assistive technologies.
3.2 Computational Complexity Analysis
Let
The subsequent clustering step operates on the
Template selection within each cluster is performed using a medoid-based strategy, requiring pairwise DTW computations within each cluster. The total complexity of this step is approximately
Overall, the proposed offline template construction method has a time complexity of
4 SCW Template Matching Method
The DTW-KM method extracts representative gait templates offline, ensuring their diversity to accommodate variations in walking conditions and individual gait patterns. However, for real-time gait trajectory prediction, these pre-extracted templates must be effectively matched and adjusted based on real-time sensor data. To address this need, we propose the Soft Constraint Weight (SCW) template matching method, which optimizes the selection and adjustment of gait templates in an online setting, enabling real-time gait phase identification and trajectory prediction.
4.1 Local-Global Template Matching for Real-Time Gait Phase Estimation
Human walking patterns exhibit a high degree of regularity and repetitiveness, which allows for relatively straightforward estimation with minimal complexity. Using the DTW-KM method to capture motion patterns and match them with real-time sensor data, we can identify local gait changes and predict gait phases with high precision. To further enhance the accuracy of these predictions, we have developed an integrated local-global template matching algorithm. This approach is designed to combine both local adjustments, reflecting immediate changes in the user’s gait, and global template matching, which maintains consistency with the overall walking pattern. The flow of this method is illustrated in Fig. 3.
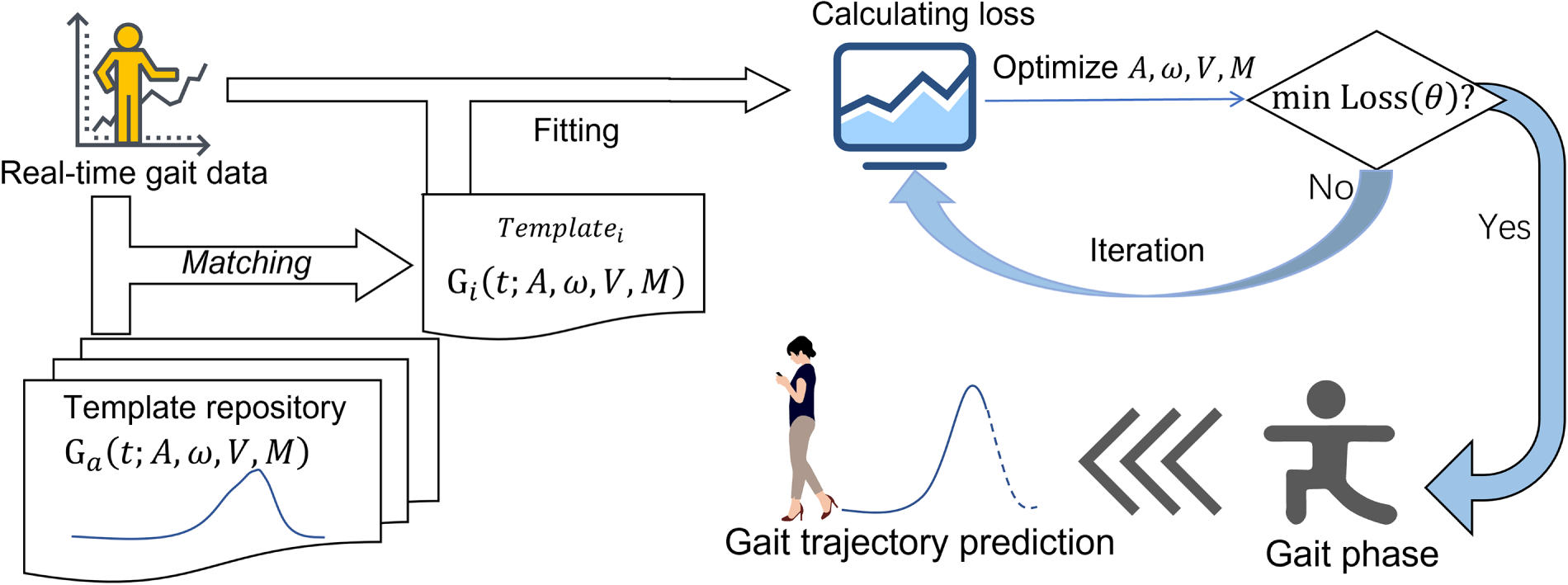
Figure 3: Integrated local-global template matching algorithm for comprehensive gait phase identification and prediction.
4.1.1 Universal Gait Template Acquisition
The first step in the SCW template matching process involves collecting gait data, segmenting it into individual gait cycles, and compiling a gait database denoted as W. Using the DTW-KM method, we extract a normalized mean gait sequence, represented as
This refined gait template represents a smooth approximation of the average gait cycle, capturing essential gait characteristics while minimizing noise and irregularities in the data.
4.1.2 Local Adjustments for Dynamic Gait Changes
To account for local variations in gait, such as changes in walking speed, stride length, or terrain, we introduce additional parameters to adjust the gait template. These include parameters for periodicity (
In this equation,
4.1.3 Local Gait Fitting via Least Squares Optimization
Once the gait template has been adjusted for local changes, we apply the adjusted template
Here,
4.1.4 Gait Phase Identification and Prediction
Using the model parameters obtained from the most recent fit, the current gait phase V can be estimated, and the future gait phases can be predicted over the next
4.1.5 Evaluation and Template Adjustment for Continuous Accuracy
After each gait prediction, the accuracy of the fit is assessed against a predefined anomaly threshold
4.2 Iterative Refinement of the Template Matching Process
The final step involves updating the time window with the latest sensor data and repeating the template matching and fitting process. This iterative refinement allows the system to continuously adjust to dynamic changes in the user’s gait, ensuring that predictions remain accurate and responsive to real-time walking conditions.
In summary, the SCW template matching method provides an effective approach to real-time gait phase identification and prediction. By combining local adjustments with global template matching, it offers a flexible and adaptive solution for wearable devices to synchronize with the user’s natural gait. Iterative refinement of the model ensures that the system remains accurate over time, making it a valuable tool to improve the functionality and responsiveness of wearable exoskeletons and other assistive devices.
4.3 The SCW Template Matching Approach
Real-time gait prediction presents significant challenges, particularly in terms of noise resilience and parameter stability. These factors are crucial for ensuring the smooth operation of assistive devices such as exoskeletons, which rely on accurate, real-time synchronization with the user’s natural movements. To address these challenges, we propose the Soft Constraint Weight (SCW) template matching algorithm. This method is specifically designed to enhance both the precision and stability of the prediction of the gait phase while optimizing computational resources. By incorporating soft constraints and a weighted loss function, the SCW algorithm can better adapt to dynamic walking conditions, ensuring that predictions remain accurate even as walking speed, terrain, or user fatigue fluctuate.
4.3.1 Integration of Soft Constraints and Weighted Loss Function
The SCW algorithm strategically combines two key components: soft constraints and a quadratic weighted loss function. Soft constraints are employed to regulate parameter updates during the fitting process, mitigating the effects of abrupt changes or noisy sensor data, and thus enhancing model stability. Meanwhile, the quadratic weighted loss function emphasizes recent data points, allowing the model to align more closely with the most current gait characteristics. This prioritization of recent data is particularly important in real-time gait prediction, where the model must continuously adjust to the ongoing changes in the user’s walking pattern.
Formally, the SCW algorithm can be defined as follows:
Given an observed time window value
In this equation:
-
-
-
-
The objective of this optimization is to minimize the loss function, which consists of two terms: the first term reflects the error between the predicted gait template and the observed real-time data, while the second term serves as an L2 regularization to maintain stability in parameter updates.
4.3.2 Soft Constraints for Enhanced Stability
Soft constraints are integral to the SCW method, as they utilize historical parameter averages to moderate the rate at which parameters are updated. This approach is particularly effective in reducing oscillations in parameter adjustments, which can arise due to noisy sensor data or sudden changes in walking conditions. The soft constraint is implemented via an
The L2 regularization term is defined as:
In this equation,
4.3.3 Weighted Loss Function for Prioritizing Recent Data
To ensure that the model remains responsive to changes in the user’s gait, the SCW algorithm incorporates a time-decaying weighting factor into the loss function. This weighting factor
The weights are calculated as:
where
4.3.4 Real-Time Parameter Adjustment and Adaptation
During real-time inference, the SCW algorithm continuously processes the latest sensor data within a moving time window, updating the model parameters
Continuous updates of the model parameters ensure that the predictions remain accurate over time, accounting for both user variability and environmental factors. As the model adapts to the latest gait data, it not only predicts the current gait phase but also anticipates future phases, enabling exoskeletons and other assistive devices to synchronize more effectively with the user’s movements.
5 Experiment and Results Analysis
5.1 Dataset and Data Acquisition
The experimental dataset was collected in-house to evaluate gait phase estimation and short-term trajectory prediction under diverse walking conditions. Fourteen healthy male adults (mean age: 24.3 years; mean body mass: 72.9 kg; mean height: 177.8 cm), with no reported musculoskeletal or neurological impairments, participated in the study.
During data acquisition, each participant wore a single IMU (Xsens DOT, Enschede, The Netherlands) mounted on the anterior tibial surface. The sensor was secured using an adjustable strap to minimize relative motion. The IMU coordinate frame was aligned with the tibial longitudinal axis and calibrated prior to collection. Kinematic data were streamed wirelessly at 60 Hz, including tri-axial angular velocity and acceleration. In this study, sagittal-plane tibial angular velocity was used as the primary input for gait phase estimation.
To ensure coverage of diverse gait dynamics, multiple walking conditions were recorded, including continuous level-ground walking, intermittent walking with frequent start–stop transitions, turning maneuvers, and static standing. Participants additionally performed simulated irregular gait patterns with increased variability in cadence and amplitude to approximate pathological features such as tremor-dominated motion.
The dataset comprises approximately 1500 segmented gait instances, including normal walking, rapid transitions, turning, standing, shuffling, and simulated pathological patterns. Transitions between locomotion and rest were explicitly included to evaluate robustness under non-steady-state conditions. For model development and evaluation, the dataset was partitioned into training (70%) and testing (30%) sets. All offline templates used in the proposed method were constructed exclusively from the training data, while the testing set was reserved strictly for performance evaluation.
Gait events, including heel strike, toe-off, and intermediate weight-transfer phases, were annotated offline using synchronized video recordings and non-real-time signal inspection. All experiments were conducted in a controlled indoor environment. For online evaluation, sequences with different motion modes were concatenated to emulate realistic daily walking scenarios involving alternating movement and rest.
5.2 Computational Efficiency and Real-Time Performance
To evaluate the real-time feasibility of the proposed framework, we measured its computational performance on a desktop platform equipped with an Intel Core i5-10400 CPU (2.90 GHz, up to 3.97 GHz) and 16 GB RAM. All algorithms were implemented in MATLAB/Python and executed in a single-threaded configuration.
The average execution time per prediction cycle, including gait phase estimation and trajectory prediction, was 4.2 ms, which is significantly lower than the sensor sampling interval (16.7 ms at 60 Hz). This confirms that the proposed method can operate in real time without introducing perceptible latency. For context, this is 3
Unlike deep learning-based methods, the proposed framework does not require offline training, parameter tuning, or model updates during deployment. Memory consumption is limited to storing a small number of representative gait templates, making the method particularly suitable for embedded wearable systems with constrained computational resources.
To clearly distinguish the computational burden of different stages, the proposed framework separates processing into an offline template construction phase and an online gait estimation and prediction phase, as summarized in Table 1.
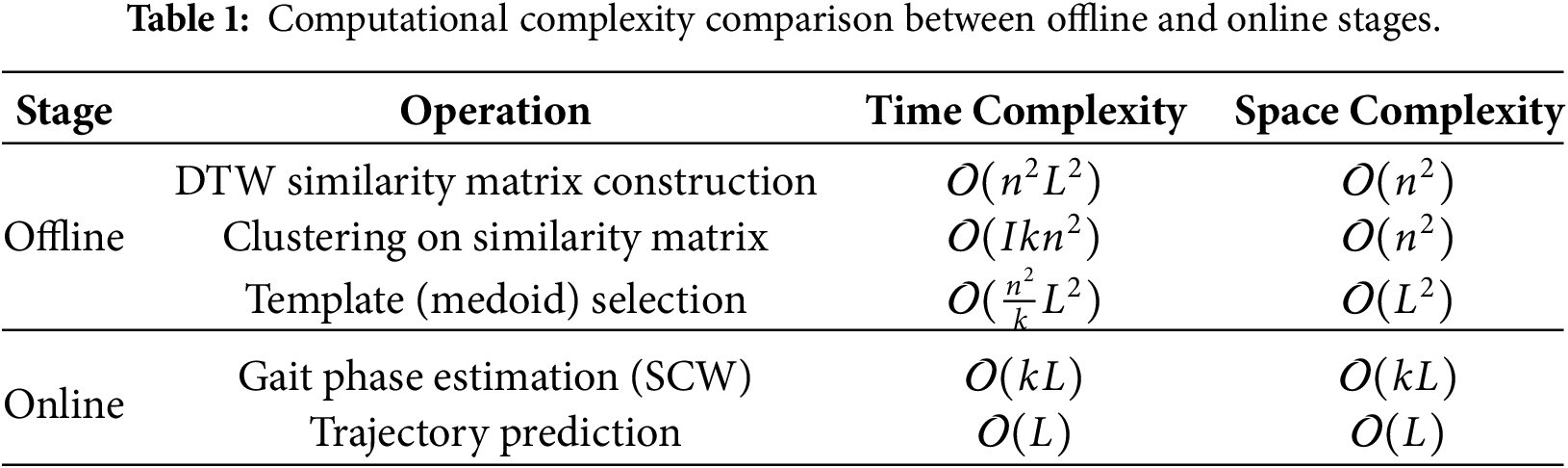
The offline stage involves DTW-based similarity computation and clustering, resulting in a higher computational cost. However, this stage is executed only once and does not affect real-time system performance.
In contrast, the online stage operates with linear complexity with respect to the window length and the number of gait templates. No iterative optimization or global DTW computation is performed online, ensuring low latency and stable real-time execution suitable for wearable exoskeleton systems.
5.3 Offline Template Preparation Phase
In this phase, which involves the offline clustering and template generation process using the DTW-KM algorithm, and compare it to a traditional Euclidean distance-based clustering method. The primary objective of this phase is to evaluate the performance of the DTW-KM algorithm for gait cycle clustering and template generation, and to compare it against a traditional Euclidean distance-based clustering algorithm. To do this, we performed clustering on a specific gait dataset and computed the Within-Cluster Sum of Squares (WCSS) for varying numbers of clusters. The WCSS is a measure of the compactness of the clusters, and it is calculated as follows:
where
The experiments were conducted by clustering the gait data into a range of cluster numbers, from
5.3.1 Clustering Results: DTW-KM vs. Euclidean Algorithm
For the Euclidean algorithm, the optimal number of clusters was determined to be
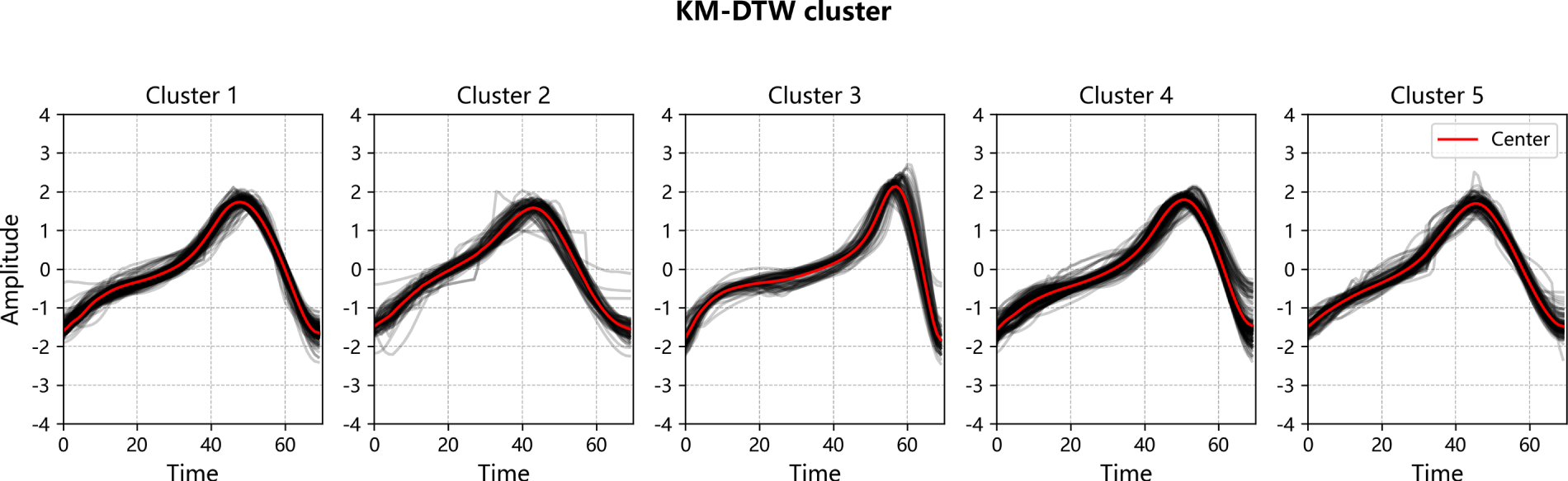
Figure 4: Time series clustering results using the DTW-KM algorithm.
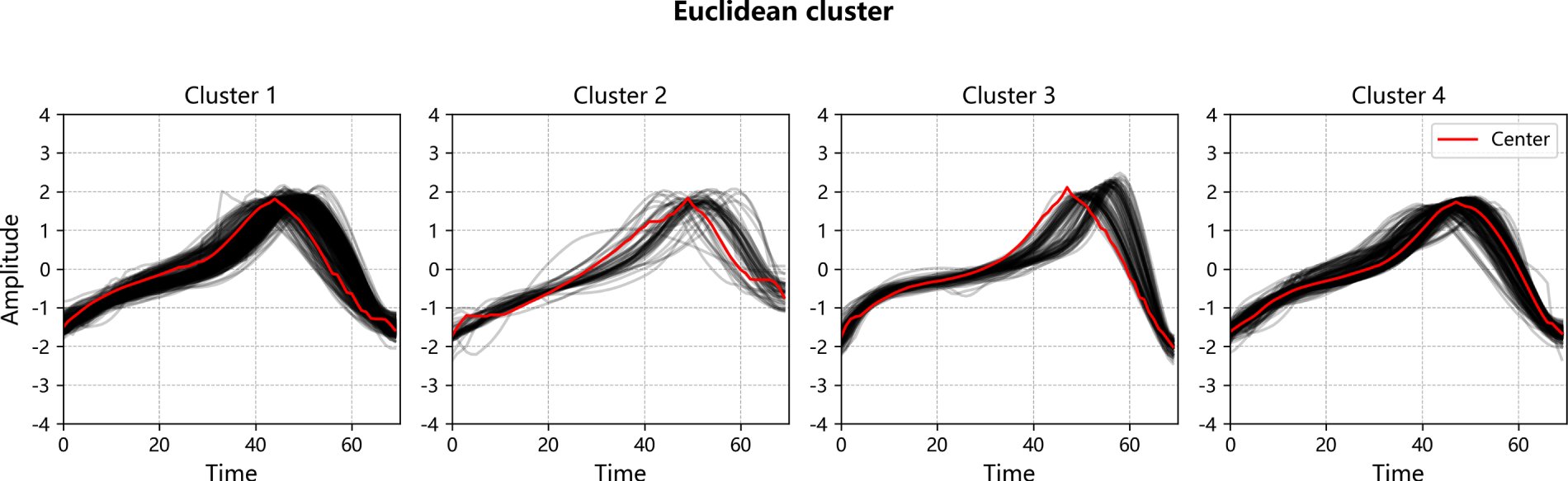
Figure 5: Time series clustering results using the Euclidean distance-based algorithm.
The clustering results are depicted in Fig. 4 for the DTW-KM method and Fig. 5 for the Euclidean distance-based method. In both figures, the red lines represent the central trajectories of each cluster, while the gray lines indicate the individual time series within each cluster.
5.3.2 Analysis of Clustering Performance
In the DTW-KM clustering results shown in Fig. 4, the algorithm successfully identifies consistent clusters with clear separation, effectively capturing the complex temporal dynamics of gait cycles. The DTW distance metric used in the DTW-KM method accounts for the temporal misalignments between gait cycles, which is critical for handling the inherent variability in human gait. This results in well-formed clusters with distinct boundaries, reflecting the natural diversity in walking patterns.
In contrast, the Euclidean algorithm, as shown in Fig. 5, exhibits less clear separation between clusters, particularly for gait cycles with different walking speeds and irregularities. The Euclidean distance metric struggles to account for temporal variations, leading to less accurate clustering results. Despite this, the Euclidean method still produces reasonable clusters for simpler gait patterns, such as normal walking.
Cluster analysis revealed that the DTW-KM algorithm identified five distinct clusters, each corresponding to a different walking speed or gait condition. Specifically, Cluster 3 was found to represent slower walking speeds, Clusters 4, 1, and 2 captured normal walking speeds, and Cluster 5 was associated with irregular gaits, such as those resulting from fatigue or environmental factors like uneven terrain.
These identified gait clusters were then used as the representative templates for the SCW template matching algorithm in the subsequent real-time prediction phase. By selecting the most relevant templates from these clusters, the SCW algorithm was able to more accurately match the current gait phase and predict future phases.
The offline clustering results demonstrate that the DTW-KM algorithm significantly outperforms the Euclidean distance-based method in terms of clustering quality and the ability to capture complex gait dynamics. The DTW-KM method’s ability to account for temporal misalignments allows it to form well-separated clusters, making it a more effective choice for gait phase prediction and template matching in wearable assistive devices. The next phase of our experiments involves real-time gait phase identification and prediction using these templates, which will be discussed in the following section.
5.4 Online Trajectory Prediction and Phase Estimation
In this section, we present the evaluation of the SCW algorithm for real-time trajectory prediction and gait phase estimation. The evaluation focuses on assessing the algorithm’s prediction accuracy for up to 10 frames ahead, using metrics such as Root Mean Squared Error (RMSE), Mean Absolute Error (MAE), and the coefficient of determination (
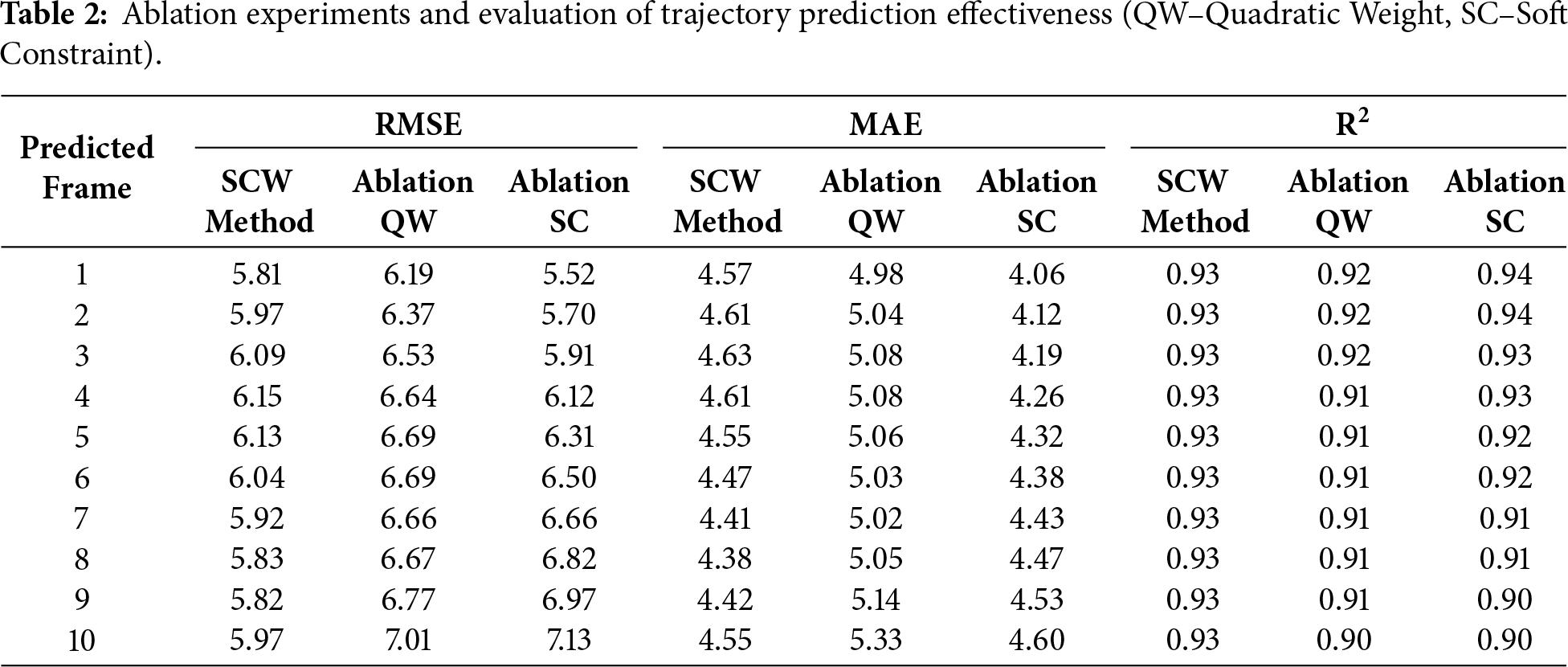
The results in Table 2 show that the SCW method demonstrated strong performance across all prediction frames, consistently achieving low RMSE, MAE, and high
In contrast, the removal of soft constraints (Ablation SC) and quadratic weighting (Ablation QW) resulted in noticeable declines in performance, especially for longer-term predictions. For example, without the soft constraints, the RMSE increased by 0.26 for 1-frame predictions and continued to rise for longer prediction horizons, while the
The inclusion of quadratic weighting also showed an improvement in prediction accuracy, especially for the first few frames, as seen in the improvement of the RMSE values in the first few predictions with quadratic weighting. These findings confirm the effectiveness of both soft constraints and quadratic weighting in improving the SCW algorithm’s prediction precision.
5.4.1 Gait Phase Estimation and Real-Time Prediction
A key advantage of the SCW method is its ability to continuously predict and estimate gait phases throughout the gait cycle. Unlike event-based methods that operate at discrete time points, SCW provides smooth and real-time phase transitions, allowing for more accurate tracking of gait states. Fig. 6 illustrates SCW’s real-time prediction performance across the gait cycle. The figure showcases the accuracy with which the SCW method identifies various gait phases, with the algorithm able to maintain high fidelity even during rapid gait changes.
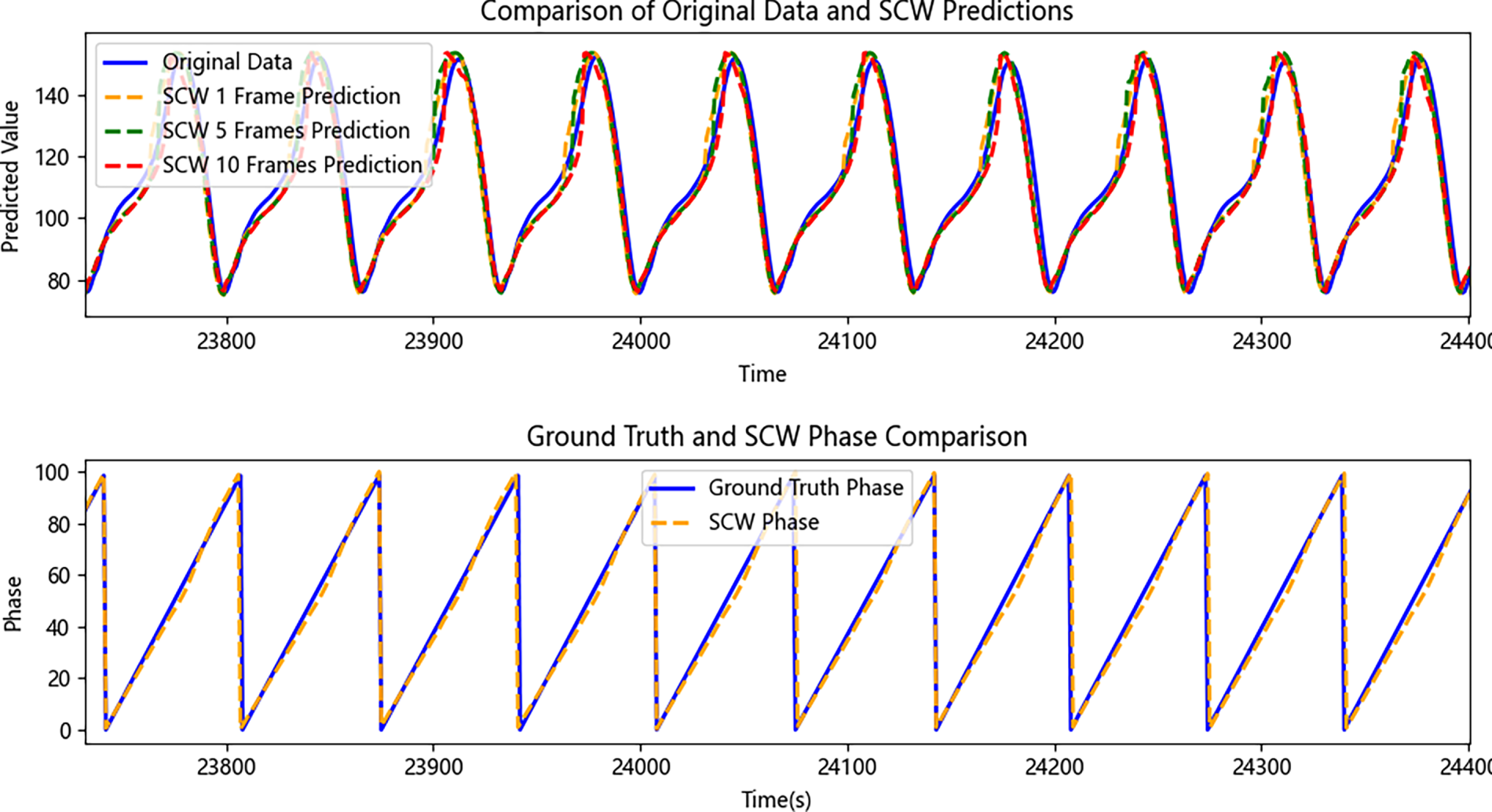
Figure 6: SCW algorithm’s prediction and phase estimation performance for different frame numbers.
5.4.2 Comparison with Literature: Gait Phase Estimation Accuracy
In addition to trajectory prediction, we evaluated SCW’s ability to estimate key gait phases, such as Heel Strike (HS), Foot Flat (FF), Heel Off (HO), and Toe Off (TO). Table 3 compares SCW’s phase estimates with those reported in existing literature. The table shows that SCW’s phase estimates are in close agreement with state-of-the-art methods, demonstrating its effectiveness in real-time gait phase detection.
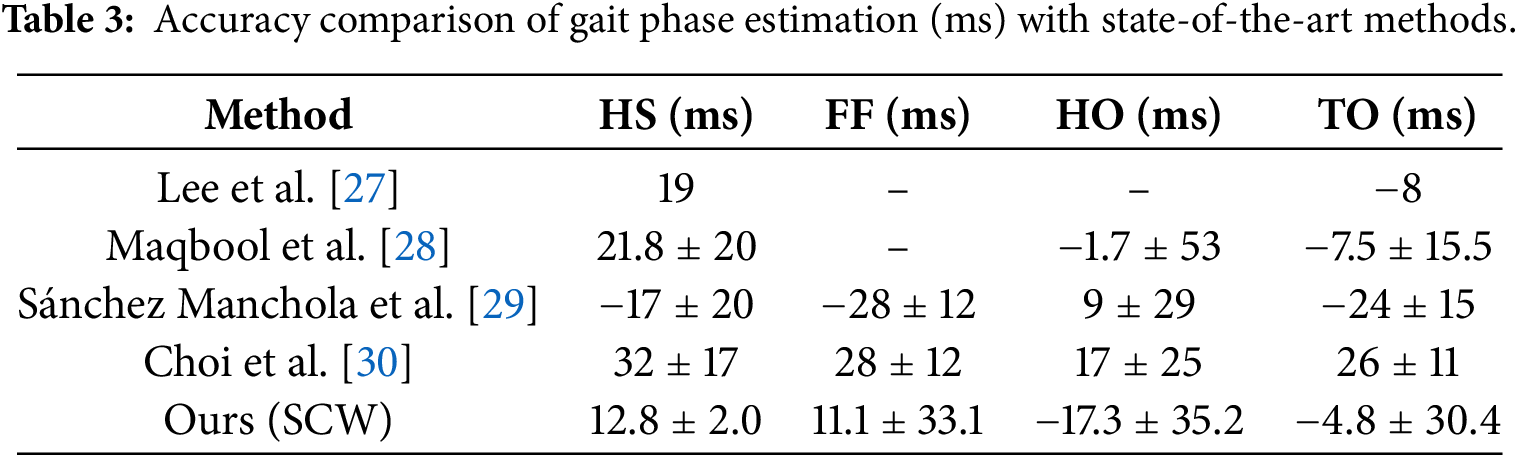
For HS, SCW estimated 12.8
These results highlight SCW’s strong performance across all gait phases, particularly in its ability to estimate the timing of these transitions with high precision, even in real-time conditions.
In this study, we proposed a dual-stage framework for gait phase estimation and trajectory prediction in wearable devices, with a particular focus on exoskeletons. This framework combines offline template extraction via the DTW-KM algorithm and real-time gait matching using the SCW (Soft Constraint Weighting) algorithm, addressing the critical challenges of dynamic gait adaptation, computational efficiency, and accuracy. Our experimental results demonstrate the effectiveness of both the DTW-KM algorithm for template generation and the SCW method for real-time phase estimation and trajectory prediction.
6.1 Effectiveness of DTW-KM for Template Extraction
The DTW-KM algorithm effectively addresses the challenge of generating diverse, representative gait templates for various walking scenarios. By incorporating DTW and K-Means clustering, the method captures complex, time-varying gait dynamics and groups them into meaningful clusters that reflect different walking speeds and patterns. The clustering results show clear distinctions between gait cycles of different speeds, with consistent cluster separation observed in the DTW distance matrix. For instance, slower gaits were distinctly categorized into one cluster, while normal and irregular gait patterns were represented in separate clusters. These templates, once extracted, provide a solid foundation for real-time matching and prediction tasks.
The versatility of the DTW-KM algorithm is particularly important in addressing the inherent variability in human gait, both across different users and in varying environmental conditions. By adapting to the specific characteristics of each gait cycle, the DTW-KM method offers a more accurate and personalized approach to gait phase recognition.
6.2 The Role of SCW in Real-Time Prediction and Phase Estimation
The SCW algorithm is a key component in this study, enabling real-time trajectory prediction and continuous phase estimation. By integrating soft constraints and a quadratic weighted loss function, SCW stabilizes the prediction model and reduces oscillations, ensuring smooth and accurate adjustments to the gait trajectory over time. The results of the ablation study reveal the significant impact of soft constraints and quadratic weighting in improving prediction accuracy. Without these features, the model showed notable performance degradation, especially for longer prediction horizons. This emphasizes the importance of incorporating stability mechanisms such as soft constraints to maintain accuracy over time.
The SCW method’s ability to predict up to 10 frames ahead, with minimal loss in accuracy, is particularly promising for practical applications in exoskeletons. Even as the prediction horizon extends, SCW maintains high prediction performance, as evidenced by its consistently low RMSE and MAE values. These results suggest that SCW can effectively assist in real-time control of wearable devices, where continuous prediction of gait phases is required for smooth and responsive operation.
6.3 Comparison with Existing Methods
Our evaluation of SCW’s phase estimation performance against established methods demonstrated its strong alignment with existing literature. SCW’s accuracy in identifying key gait phases such as HS, FF, HO, and TO is comparable to or even better than other methods, particularly in real-time scenarios. The timing discrepancies for these phases were within an acceptable range when compared with previous studies, indicating that SCW can reliably estimate phase transitions with high precision. To further clarify the advantages of the proposed approach, a qualitative comparison with representative gait prediction and phase estimation methods is summarized in Table 4.
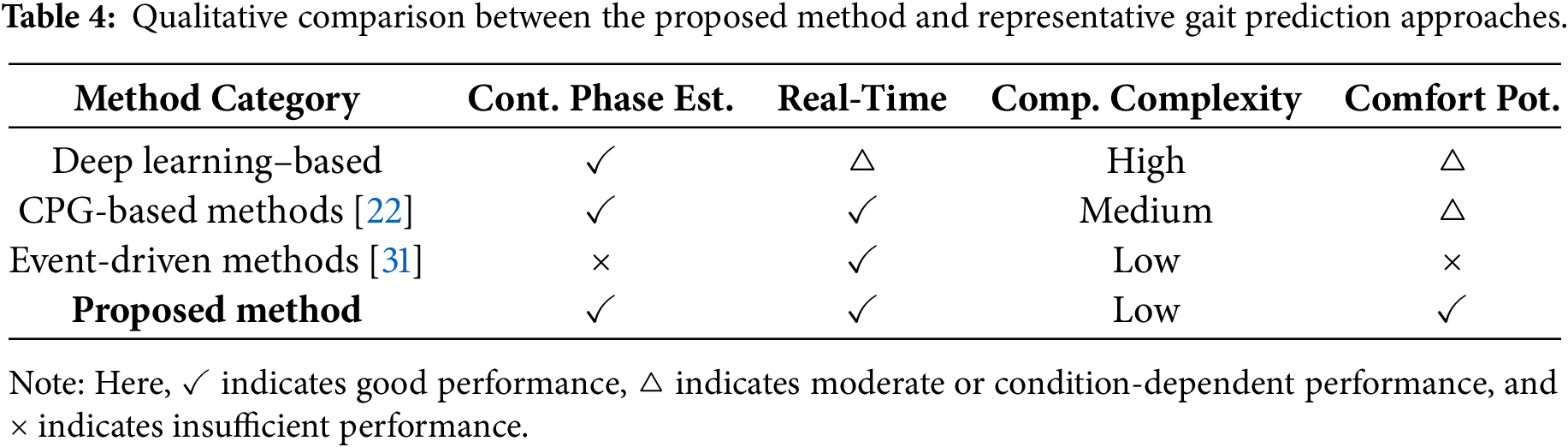
Continuous phase estimation refers to the ability to provide smooth and continuous gait phase information rather than discrete event detection. Real-time performance indicates whether the method can be executed with low latency on embedded or wearable systems. Computational complexity reflects the relative computational burden of the method. Comfort potential refers to the capability of the control-related gait prediction method to reduce abrupt assistance changes and improve human–exoskeleton interaction smoothness.
While SCW performs well in detecting gait phases, there are some areas for improvement. For instance, the variability observed in the estimation of the FF and HO phases indicates that more fine-tuning may be needed for these specific transitions, especially when dealing with highly variable or irregular gaits. Future work could focus on refining the SCW method to improve phase detection in these instances, possibly through more advanced feature extraction techniques or multi-modal sensor fusion.
6.4 Real-Time Performance Analysis
Real-time performance is a critical requirement for ankle exoskeleton control systems. Unlike learning-based gait prediction methods that require computationally intensive model inference, the proposed method is based on online DTW and template-based trajectory prediction, which involve only distance calculation and simple mapping operations.
The computational complexity of the DTW-based phase recognition is bounded due to the use of short sliding windows, and the trajectory prediction stage introduces negligible computational overhead. As a result, the proposed method is suitable for real-time implementation on embedded systems commonly used in wearable exoskeletons.
Compared with deep learning and optimization-based methods, the proposed approach provides a favorable trade-off between prediction accuracy and real-time feasibility.
6.5 Differences between Healthy Users and Hemiparetic Users in Exoskeleton Wearing Response
Compared with healthy users, individuals with partial hemiparesis typically exhibit asymmetric gait patterns, increased stride-to-stride variability, and reduced voluntary control of the ankle joint. These characteristics make hemiparetic users more sensitive to control latency, phase misalignment, and abrupt assistance changes when wearing ankle exoskeletons.
In such cases, inappropriate timing or unstable control outputs may trigger strong resistance responses, including discomfort, altered muscle activation, or gait instability. Therefore, control strategies validated on healthy subjects may not directly translate to impaired populations without additional robustness mechanisms.
The proposed method incorporates DTW-based temporal alignment and soft-constrained online parameter adaptation to mitigate these issues. By suppressing abrupt parameter changes and enabling continuous gait phase estimation with short-term prediction, the framework aims to reduce the likelihood of strong adverse responses when applied to hemiparetic gait assistance.
Although the experimental evaluation in this study is conducted on healthy subjects, the algorithmic design explicitly accounts for gait irregularities and temporal distortions commonly observed in hemiparetic gait. Future work will include clinical experiments with hemiparetic users to quantitatively evaluate user comfort, resistance response, and human–exoskeleton interaction safety.
This study presents a dual-branch framework for gait trajectory prediction in exoskeletons and embedded systems, combining offline learning and online prediction. The offline phase uses DTW and K-Means clustering to extract adaptable gait templates. The online phase introduces SCW method, enhancing real-time prediction adaptability and timelines.
The framework achieves low-latency, high-precision predictions while maintaining computational efficiency on resource-constrained devices. It ensures prediction accuracy and efficient operation under limited resources, advancing the practical application of intelligent devices like exoskeletons.
Acknowledgement: Not applicable.
Funding Statement: This research was supported by Shenzhen Municipal Natural Science Foundation and Shenzhen Science and Technology Innovation Committee (KCXFZ202002011010487), Shenzhen Municipal Natural Science Foundation (WDZC20200818121348001).
Author Contributions: The authors confirm contribution to the paper as follows: Sihan Wang and Xingjun Wang conceptualized the study. Sihan Wang was responsible for the methodology, software development, formal analysis, investigation, resources, data curation, and original draft preparation. Luyao Liu and Yifan Liu contributed to the validation of the study and participated in writing—review and editing. Sihan Wang was also responsible for visualization, while Xingjun Wang provided supervision and project administration. Xingjun Wang was the corresponding author and acquired funding for the project. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the Corresponding author Yifan Liu upon reasonable request.
Ethics Approval: Not applicable. This study did not involve any new experiments with human or animal subjects. All data used in this work were obtained from previously collected or anonymized datasets and were analyzed solely for methodological evaluation.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Siviy C, Baker LM, Quinlivan BT, Porciuncula F, Swaminathan K, Awad LN, et al. Opportunities and challenges in the development of exoskeletons for locomotor assistance. Nat Biomed Eng. 2023;7(4):456–72. doi:10.1038/s41551-022-00984-1. [Google Scholar] [PubMed] [CrossRef]
2. Tan G, Uchitomi H, Isobe R, Miyake Y. Sense of embodiment with synchronized avatar during walking in mixed reality. Sci Rep. 2024;14(1):21198. doi:10.1038/s41598-024-72095-7. [Google Scholar] [PubMed] [CrossRef]
3. Hanif CA, Mughal MA, Khan MA, Almujally NA, Kim T, Cha J-H. Human gait recognition for biometrics application based on deep learning fusion assisted framework. Comput Mater Contin. 2024;78(1):357–74. doi:10.32604/cmc.2023.043061. [Google Scholar] [CrossRef]
4. Liu X, Liu Y, Wang X. Efficient gait trajectory prediction method based on soft constraint weighted template matching: work-in-progress. In: Proceedings of the 2023 International Conference on Hardware/Software Codesign and System Synthesis; 2023 Sep 17–22; Hamburg, Germany. p. 46–7. [Google Scholar]
5. Liu Y, Liu X, Zhu Q, Chen Y, Yang Y, Xie H, et al. Adaptive detection in real-time gait analysis through the dynamic gait event identifier. Bioengineering. 2024;11(8):806. doi:10.3390/bioengineering11080806. [Google Scholar] [PubMed] [CrossRef]
6. Guo C, Li Y, Liu Z, Liu Y, Yi J, Wang Q, et al. Continuous gait phase estimation by muscle deformations with speed and ramp adaptability. IEEE Sens J. 2024;24(14):23173–82. doi:10.1109/jsen.2024.3404633. [Google Scholar] [CrossRef]
7. Heo DH, Park SH, Kang SJ. Resource-constrained edge-based deep learning for real-time person-identification using foot-pad. Eng Appl Artif Intell. 2024;138(19):109290. doi:10.1016/j.engappai.2024.109290. [Google Scholar] [CrossRef]
8. Martinez-Hernandez U, Awad MI, Dehghani-Sanij AA. Learning architecture for the recognition of walking and prediction of gait period using wearable sensors. Neurocomputing. 2022;470(22):1–10. doi:10.1016/j.neucom.2021.10.044. [Google Scholar] [CrossRef]
9. Lobo P, Morais P, Murray P, Vilaça JL. Trends and innovations in wearable technology for motor rehabilitation, prediction, and monitoring: a comprehensive review. Sensors. 2024;24(24):7973. doi:10.3390/s24247973. [Google Scholar] [PubMed] [CrossRef]
10. Mukund A. Wearable technology and sensor data in assistive systems: enhancing rehabilitation through predictive analytics. In: Predictive algorithms for rehabilitation and assistive systems. Hershey, PA, USA: IGI Global Scientific Publishing; 2025. p. 253–90. [Google Scholar]
11. Salaorni F, Bonardi G, Schena F, Tinazzi M, Gandolfi M. Wearable devices for gait and posture monitoring via telemedicine in people with movement disorders and multiple sclerosis: a systematic review. Expert Rev Med Devices. 2024;21(1–2):121–40. doi:10.1080/17434440.2023.2298342. [Google Scholar] [PubMed] [CrossRef]
12. Luo J, Xu B, Tjahjadi T, Yi J. A novel 3D gait model for subject identification robust against carrying and dressing variations. Comput Mater Contin. 2024;80(1):235–61. doi:10.32604/cmc.2024.050018. [Google Scholar] [CrossRef]
13. Romero-Sorozábal P, Delgado-Oleas G, Laudanski AF, Gutiérrez Á, Rocon E. Novel methods for personalized gait assistance: three-dimensional trajectory prediction based on regression and LSTM models. Biomimetics. 2024;9(6):352. doi:10.3390/biomimetics9060352. [Google Scholar] [PubMed] [CrossRef]
14. Saoud LS, Hussain I. Kinematic integration network with enhanced temporal intelligence and quality-driven attention for precise joint angle prediction in exoskeleton-based gait analysis. IEEE Access. 2025;13:112508–27. doi:10.36227/techrxiv.170555233.35134556/v1. [Google Scholar] [CrossRef]
15. Lee J, Bjelonic M, Reske A, Wellhausen L, Miki T, Hutter M. Learning robust autonomous navigation and locomotion for wheeled-legged robots. Sci Robot. 2024;9(89):eadi9641. doi:10.1126/scirobotics.adi9641. [Google Scholar] [PubMed] [CrossRef]
16. Arshad H, Khan MA, Sharif MI, Yasmin M, Tavares JMR, Zhang YD, et al. A multilevel paradigm for deep convolutional neural network features selection with an application to human gait recognition. Expert Syst. 2022;39(7):e12541. [Google Scholar]
17. Diraco G, Rescio G, Siciliano P, Leone A. Review on human action recognition in smart living: sensing technology, multimodality, real-time processing, interoperability, and resource-constrained processing. Sensors. 2023;23(11):5281. [Google Scholar] [PubMed]
18. Lv H, Hao B. Convolutional neural network and long short-term memory hybrid model-based gait prediction for spacesuit intelligent assistive device in low gravity environment. Acta Astronaut. 2025;236(3):199–212. doi:10.1016/j.actaastro.2025.06.049. [Google Scholar] [CrossRef]
19. Yang C, Pu C, Zou Y, Wei T, Wang C, Li Z. Bio-inspired neural networks with central pattern generators for learning multi-skill locomotion. Sci Rep. 2025;15(1):10165. doi:10.1038/s41598-025-94408-0. [Google Scholar] [PubMed] [CrossRef]
20. Zhou Y, Cheng J, Chen B, Zhou J, Yue K, Wang Z. CBF-based constrained optimization for safe and adaptive CPG gait planning in rehabilitation robots. In: 2025 44th Chinese Control Conference (CCC). Piscataway, NJ, USA: IEEE; 2025. p. 5095–100. [Google Scholar]
21. Hu Y, Liang J, Wang T. Parameter synthesis of coupled nonlinear oscillators for CPG-based robotic locomotion. IEEE Trans Ind Electron. 2014;61(11):6183–91. doi:10.1109/tie.2014.2308150. [Google Scholar] [CrossRef]
22. Kou J, Wang Y, Chen Z, Shi Y, Guo Q. Gait planning and multimodal human-exoskeleton cooperative control based on central pattern generator. IEEE/ASME Trans Mechatron. 2025;30(4):2598–608. doi:10.1109/tmech.2024.3453037. [Google Scholar] [CrossRef]
23. Liu Y, Liu X, Wang Z, Yang X, Wang X. Improving performance of human action intent recognition: analysis of gait recognition machine learning algorithms and optimal combination with inertial measurement units. Comput Biol Med. 2023;163:107192. [Google Scholar] [PubMed]
24. Zhan H, Kou J, Cao Y, Wang W, Zhang J, Shi Y, et al. Model identification and admittance control with neighborhood field optimization in human-exoskeleton cooperative motion. Robotica. 2025;43(12):4560–75. doi:10.1017/s0263574725103032. [Google Scholar] [CrossRef]
25. Lee J, Hong W, Hur P. Continuous gait phase estimation using LSTM for robotic transfemoral prosthesis across walking speeds. IEEE Trans Neural Syst Rehabil Eng. 2021;29:1470–7. doi:10.1109/tnsre.2021.3098689. [Google Scholar] [PubMed] [CrossRef]
26. Zhang Z, Wang Z, Lei H, Gu W. Gait phase recognition of lower limb exoskeleton system based on the integrated network model. Biomed Signal Process Control. 2022;76(6):103693. doi:10.1016/j.bspc.2022.103693. [Google Scholar] [CrossRef]
27. Lee SS, Choi ST, Choi SI. Classification of gait type based on deep learning using various sensors with smart insole. Sensors. 2019;19(8):1757. doi:10.3390/s19081757. [Google Scholar] [PubMed] [CrossRef]
28. Maqbool HF, Husman MAB, Awad MI, Abouhossein A, Mehryar P, Iqbal N, et al. Real-time gait event detection for lower limb amputees using a single wearable sensor. In: 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). Piscataway, NJ, USA: IEEE; 2016. p. 5067–70. [Google Scholar]
29. Sánchez Manchola MD, Bernal MJP, Munera M, Cifuentes CA. Gait phase detection for lower-limb exoskeletons using foot motion data from a single inertial measurement unit in hemiparetic individuals. Sensors. 2019;19(13):2988. doi:10.3390/s19132988. [Google Scholar] [PubMed] [CrossRef]
30. Choi W, Yang W, Na J, Lee G, Nam W. Feature optimization for gait phase estimation with a genetic algorithm and Bayesian optimization. Appl Sci. 2021;11(19):8940. doi:10.3390/app11198940. [Google Scholar] [CrossRef]
31. Tanghe K, De Groote F, Lefeber D, De Schutter J, Aertbeliën E. Gait trajectory and event prediction from state estimation for exoskeletons during gait. IEEE Trans Neural Syst Rehabil Eng. 2019;28(1):211–20. doi:10.1109/tnsre.2019.2950309. [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools