
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
A Weighted Average Finite Difference Scheme for the Numerical Solution of Stochastic Parabolic Partial Differential Equations
1
Department of Mathematics, Faculty of Arts and Sciences, Çankaya University, Ankara, 06530, Turkey
2
Institute of Space Sciences, Magurele-Bucharest, R 76900, Romania
3
Department of Medical Research, China Medical University Hospital, China Medical University, Taichung, 40402, Taiwan
4
Department of Mathematics, Vali-e-Asr University of Rafsanjan, Rafsanjan, 77188-97111, Iran
5
Department of Electrical Engineering, University of Bojnord, Bojnord, 94531-1339, Iran
* Corresponding Author: Amin Jajarmi. Email:
Computer Modeling in Engineering & Sciences 2023, 135(2), 1147-1163. https://doi.org/10.32604/cmes.2022.022403
Received 08 March 2022; Accepted 07 June 2022; Issue published 27 October 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In the present paper, the numerical solution of Itô type stochastic parabolic equation with a time white noise process is imparted based on a stochastic finite difference scheme. At the beginning, an implicit stochastic finite difference scheme is presented for this equation. Some mathematical analyses of the scheme are then discussed. Lastly, to ascertain the efficacy and accuracy of the suggested technique, the numerical results are discussed and compared with the exact solution.Keywords
Stochastic partial differential equations (SPDEs) driven by white noise are one of the essential classes of partial differential equations (PDEs). This class of equations arises in many branches of applied sciences and engineering, such as nonlinear filtering [1], turbulent flows [2], population biology [3], microscopic particle dynamics [4], groundwater flow [5], etc. Few numbers of SPDEs can be solved by analytical techniques [6], most of which cannot be analyzed by well-known analytical schemes suitably. Due to this reason, various numerical methods have been discussed to solve such equations [7–9]. For instance, the authors in [10] proposed an explicit scheme to obtain the approximate solution of stochastic equations. In [11], a compact finite difference method for solving a stochastic advection-diffusion equation was proposed. In [12], two techniques on the basis of Saul’yev method and finite difference scheme were suggested for solving linear SPDEs. In [13], explicit and implicit finite difference methods were proposed to obtain the solution of general SPDEs. In [14], a stochastic compact finite difference scheme was suggested for solving a stochastic fractional advection-diffusion equation. In [15], high-resolution finite volume methods were used to solve SPDEs. In [16], the authors proposed a spectral collocation method for the numerical solution of SPDEs driven by infinite dimensional fractional Brownian motions. More than these, some authors used spectral methods for the discretization of spatial variables and applied a Crank-Nicolson scheme or a stochastic Runge-Kutta method for solving the resultant system of stochastic differential equations [17].
In [18,19], the authors investigated the convergence and stability of two stochastic finite difference schemes for a class of SPDEs. In more detail, the study [19] employed a Crank-Nicolson technique for the approximation of second-order derivatives. Although the reported results in [18,19] are interesting in some senses, the solution methods presented are only conditionally stable. To overcome this issue, here we extend a type of finite difference scheme to a stochastic version in order to approximate the solution of a stochastic advection-diffusion equation. To do so, instead of the Crank-Nicolson method used in [19], we consider a convex combination of discretized second-order derivatives in two consecutive time grid points. As a result, the proposed method in our case is unconditionally stable under a necessary condition, so there will be no limitation for the selection of space and time step sizes. This important feature makes the computational cost of our suggested technique less than the other methods available in the literature [18,19]. In the following, the main contributions of our study are summarized and highlighted as below:
• In this paper, a stochastic finite difference scheme is developed for the numerical solution of Itô type stochastic parabolic equation.
• As a theoretical investigation, some mathematical results for the proposed scheme are studied.
• In addition, the convergence of the suggested technique is discussed, and the necessary conditions for its conditional and unconditional stability are explored.
• Finally, the efficiency of the proposed method is shown by some numerical examples, and its key qualifications are examined as well.
The rest of this paper is structured as follows. An implicit finite difference scheme is proposed in Section 2, where some mathematical analyses are also investigated. Next, some numerical results are given in Section 3. Finally, the paper is closed by some concluding remarks in the last section.
In this work, the following problem for the stochastic equation of Itô type is considered:
for
Finite difference schemes are the most natural way of solving PDEs numerically. Furthermore, these methods are widely used in approximating the solution of SPDEs like (1). The idea behind these schemes is to discretize the continuous time and space into a finite number of discrete grid points. Then the values of state variables are calculated at any point of the grid. By considering a uniform space grid
where
and employ a convex combination of second-order derivatives in the time steps m and
For more details, the interested reader can refer to [21]. Substituting the approximations from (2) into (1), we can find
where
Remark 2.1. In the proposed scheme, the Wiener process increments are not dependent on the state
Substantially, the convergence of the stochastic difference scheme to the SPDE solution is very important. To achieve this, consider an SPDE in the form of
where
Definition 2.1. A stochastic finite difference scheme
as
Theorem 2.1. The numerical scheme (5) is consistent in mean square in the sense of Definition 2.1.
Proof. For the smooth function
and
Accordingly,
In as much as
By the assumption that
where
and
where
will be the necessary and sufficient condition for the stability [10].
Theorem 2.2. For the stochastic advection-diffusion Eq. (1), the stochastic scheme (5) is unconditionally stable for
Proof. Substituting (11) into (5), we get
Then we have
Hence, the stochastic difference scheme amplification factor is
Set
It is easy to see that
is equivalent to
And also
is always satisfied. Hence, we see that if
Definition 2.2. The stochastic difference scheme
Theorem 2.3. The numerical scheme (5) for the Eq. (1) is convergent in mean square with respect to
Proof. The stochastic finite difference scheme is given by
The solution
where
Let
It gives that
where
we have
and so
By introducing the notation
and the usage of supposition
Therefore,
and
It gives that
When
and so
Here, it is worth mentioning that according to the inequality (32), the error of the proposed scheme (5) is of first order with respect to the time.
3 Numerical Results and Discussion
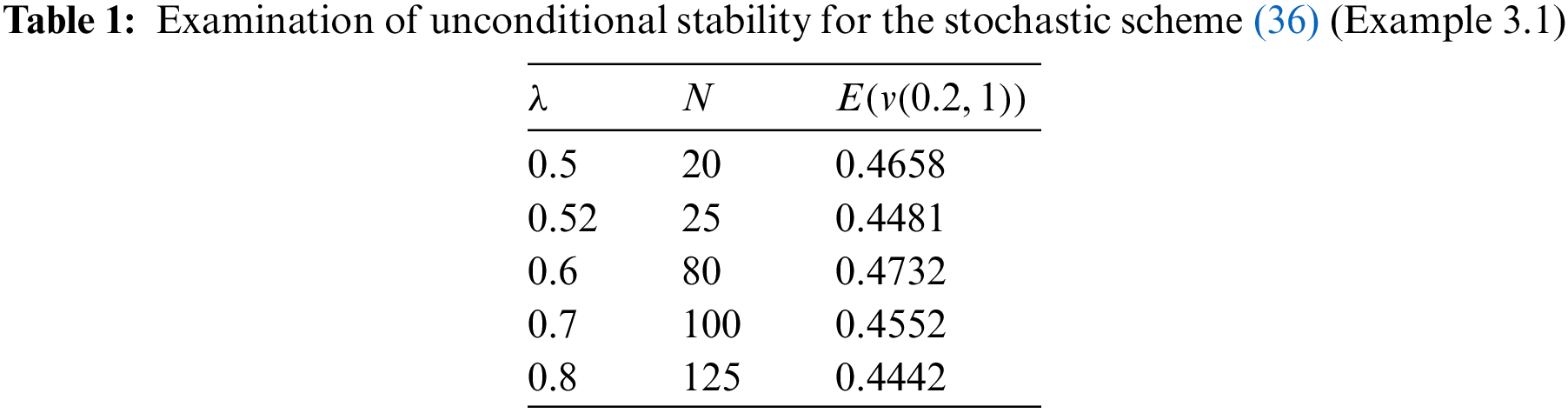
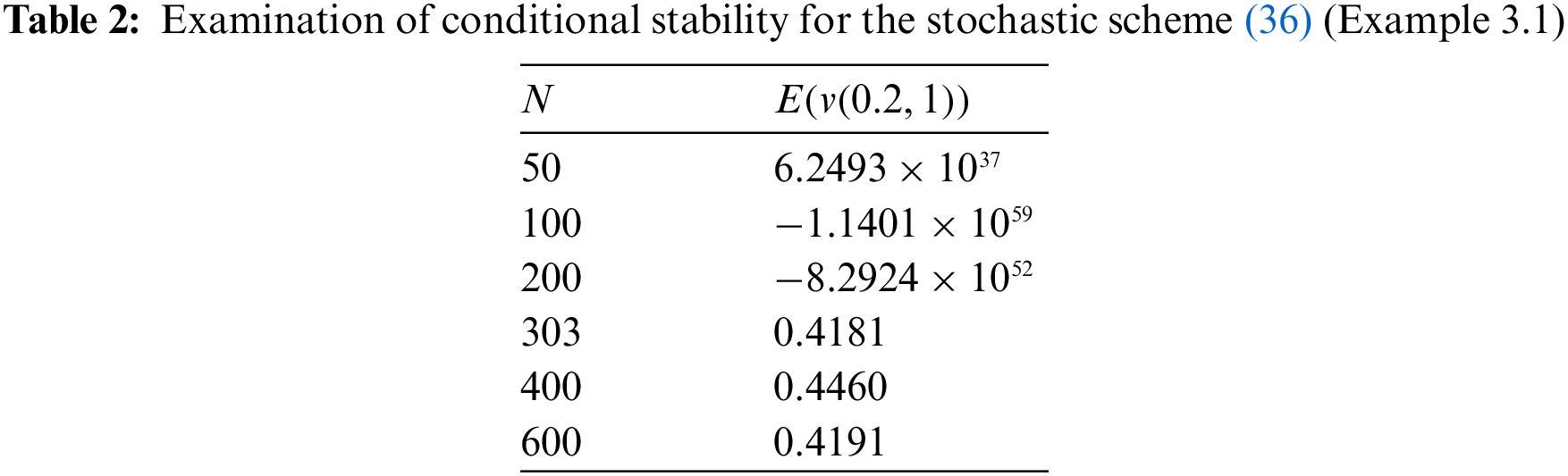
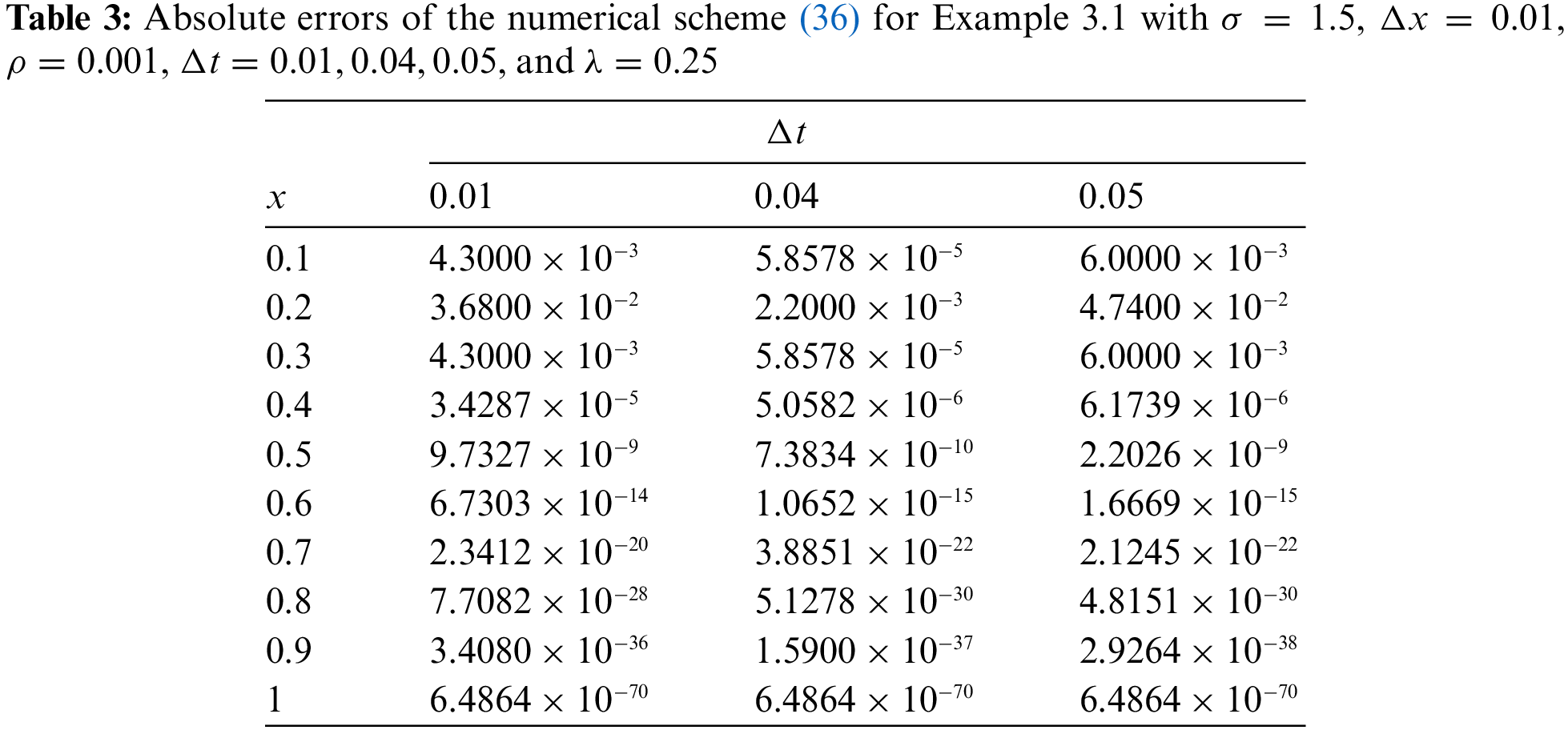
In this part, we demonstrate the efficacy and accuracy of the suggested technique, developed in the previous section, by solving some numerical examples. Indeed, we investigate the theoretical consequences of previous section about the stability and convergence of the proposed scheme (5). In more detail, we discuss the convergence of the scheme (5) for each example and explore the necessary conditions for its conditional and unconditional stability. Numerical results in this section verify the previously presented theoretical analysis.
Example 3.1. Consider an SPDE in the following form:
supplemented with the initial and boundary conditions
The exact solution is
if there is no noise term. Following the proposed idea developed in this paper, the stochastic finite difference scheme can be written as follows:
where
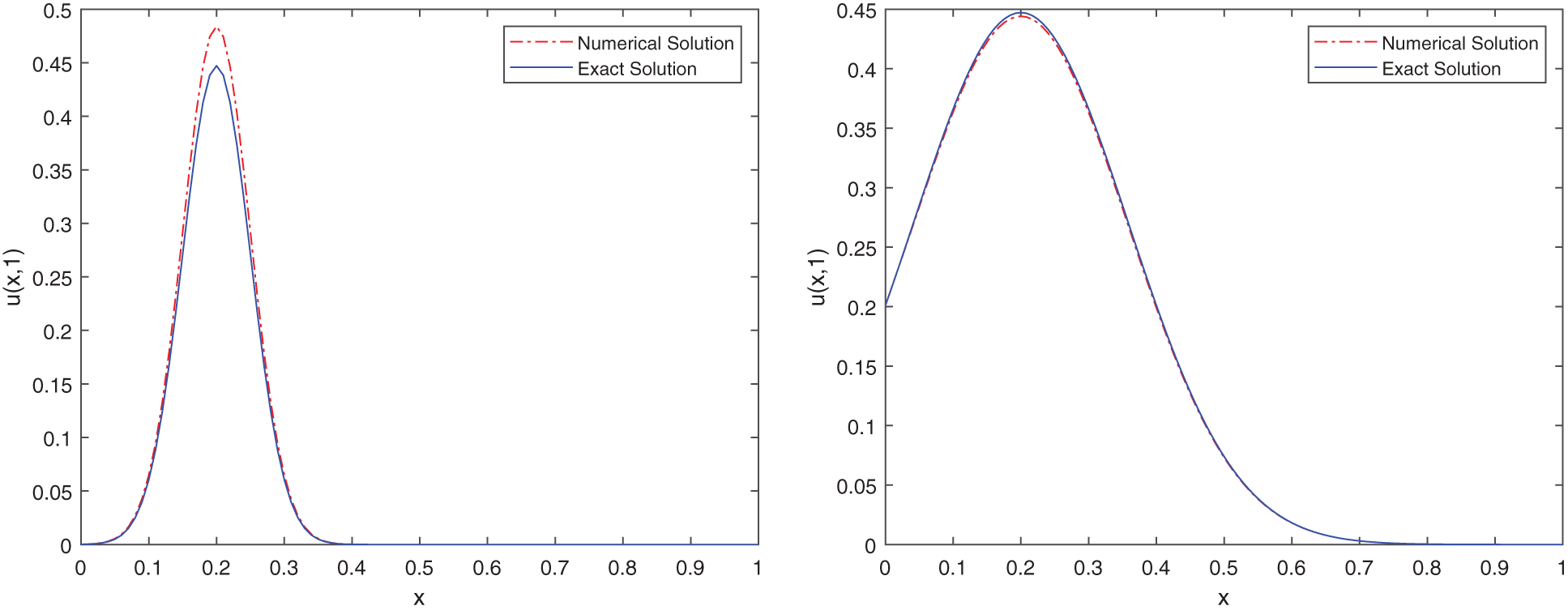
Figure 1: Comparison between the exact solution and the stochastic numerical solution of (33) with
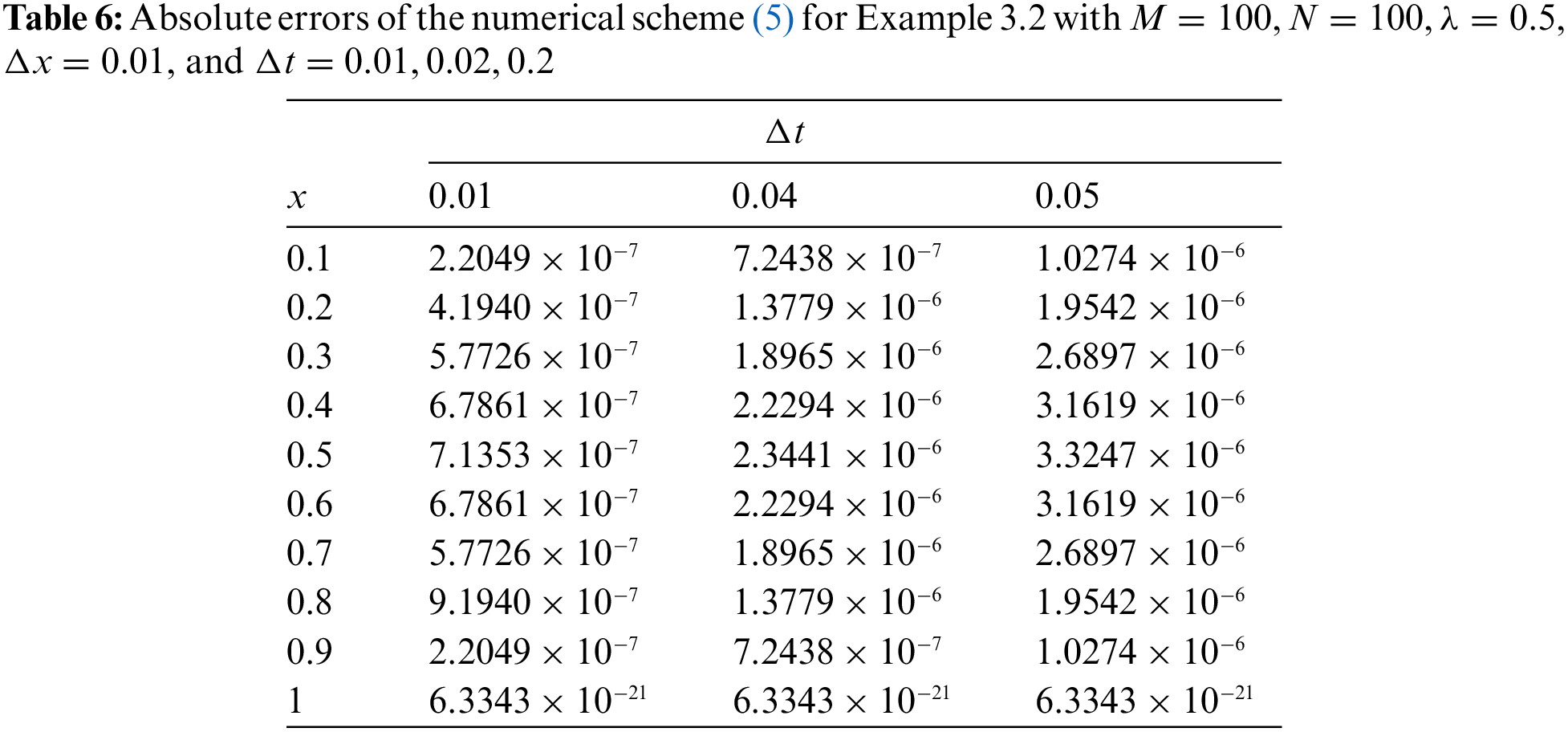
Example 3.2. Let us consider the following problem for the next example:
with the exact solution
In Fig. 2, the exact solution and the stochastic numerical solution of (37) are compared for the two sets of
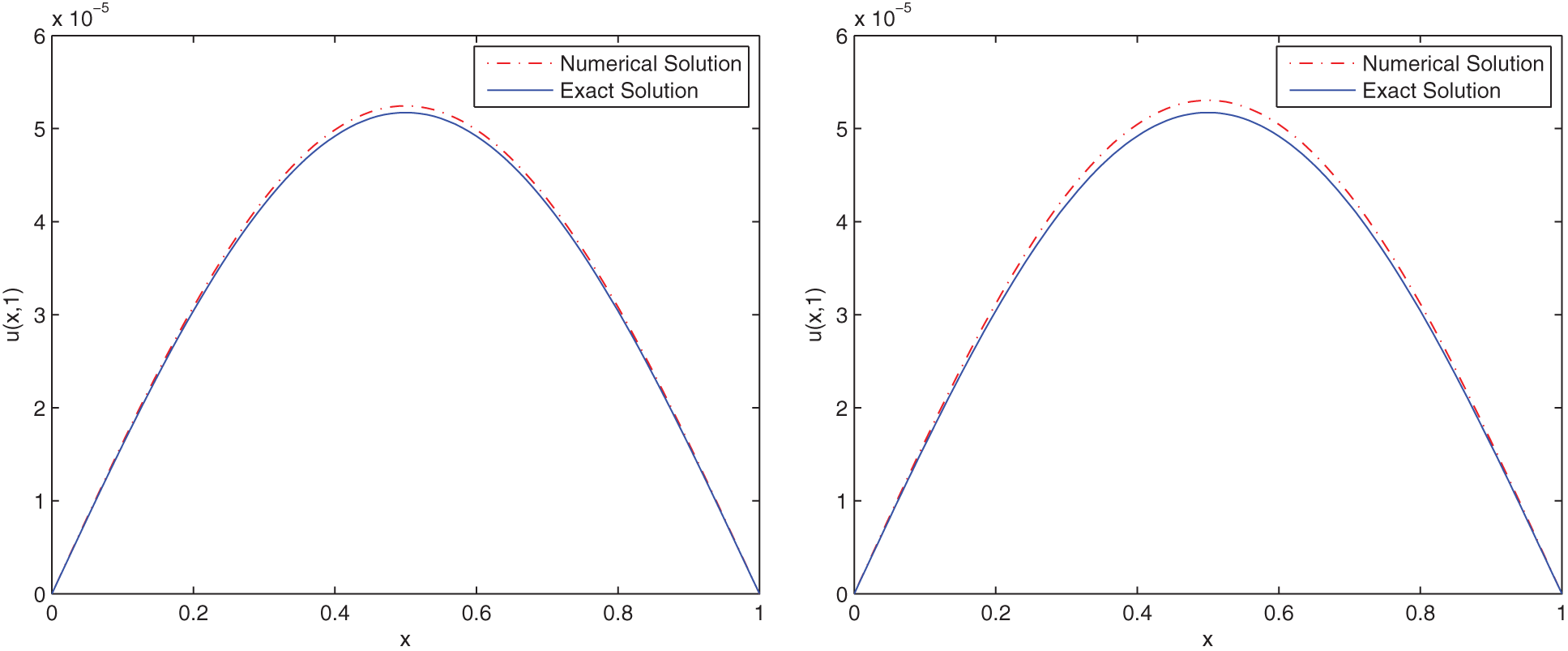
Figure 2: Comparison between the exact solution and the stochastic numerical solution of (37) with M = 100, N = 100,
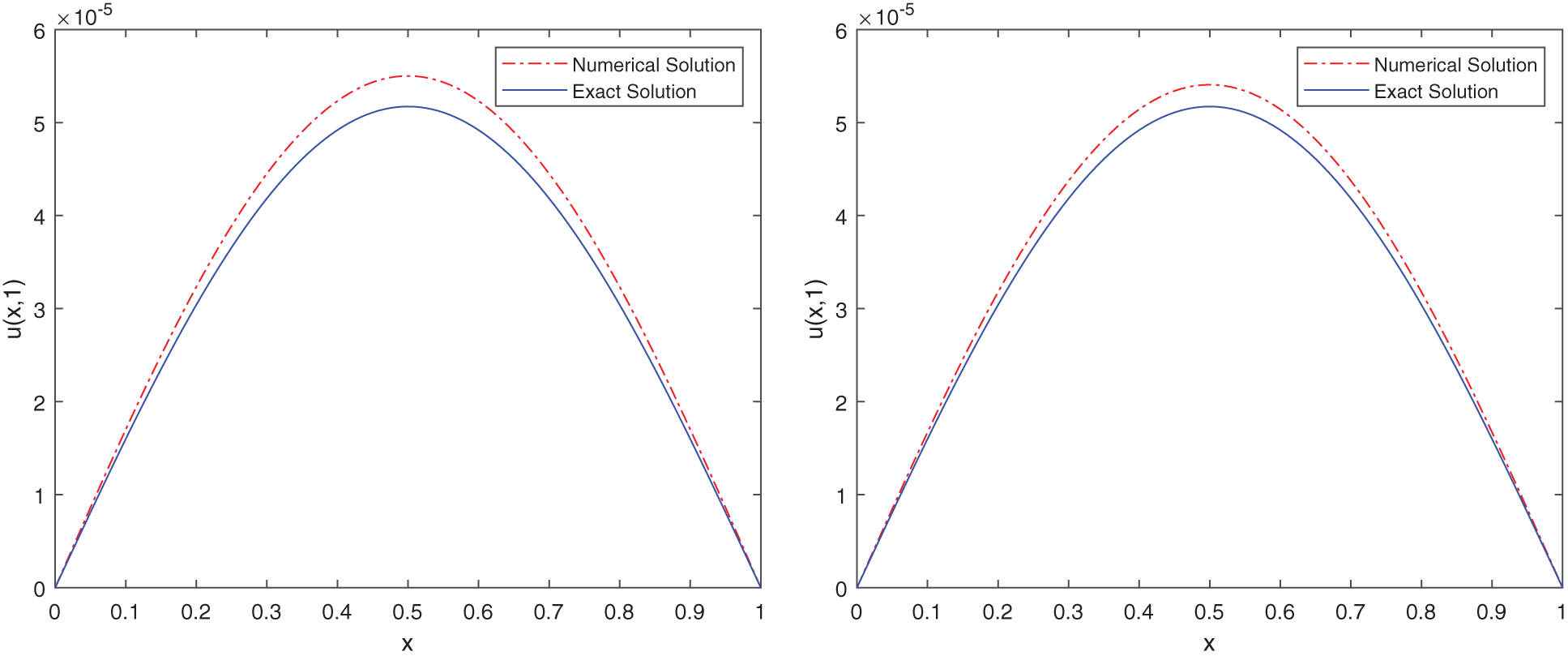
Figure 3: Comparison between the exact solution and the stochastic numerical solution of (37) with
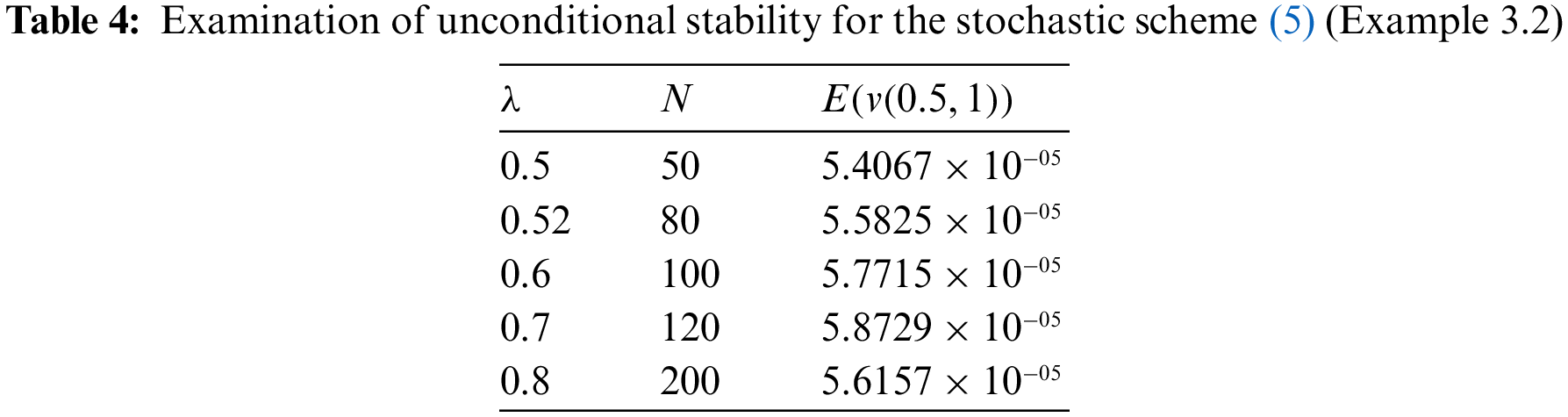
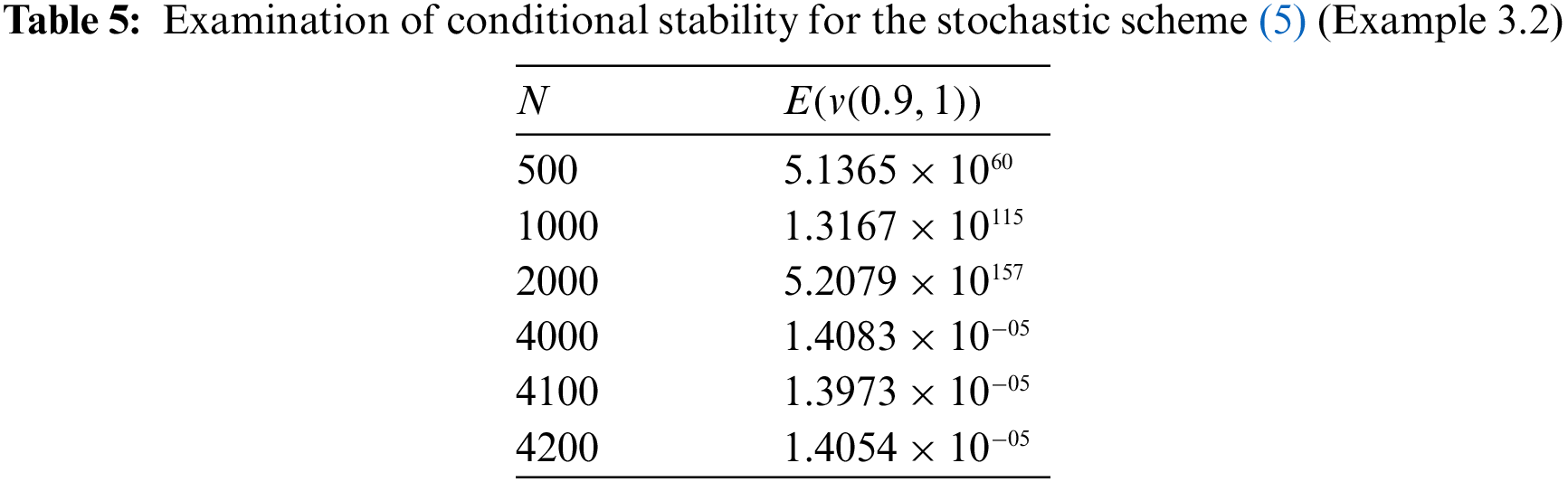
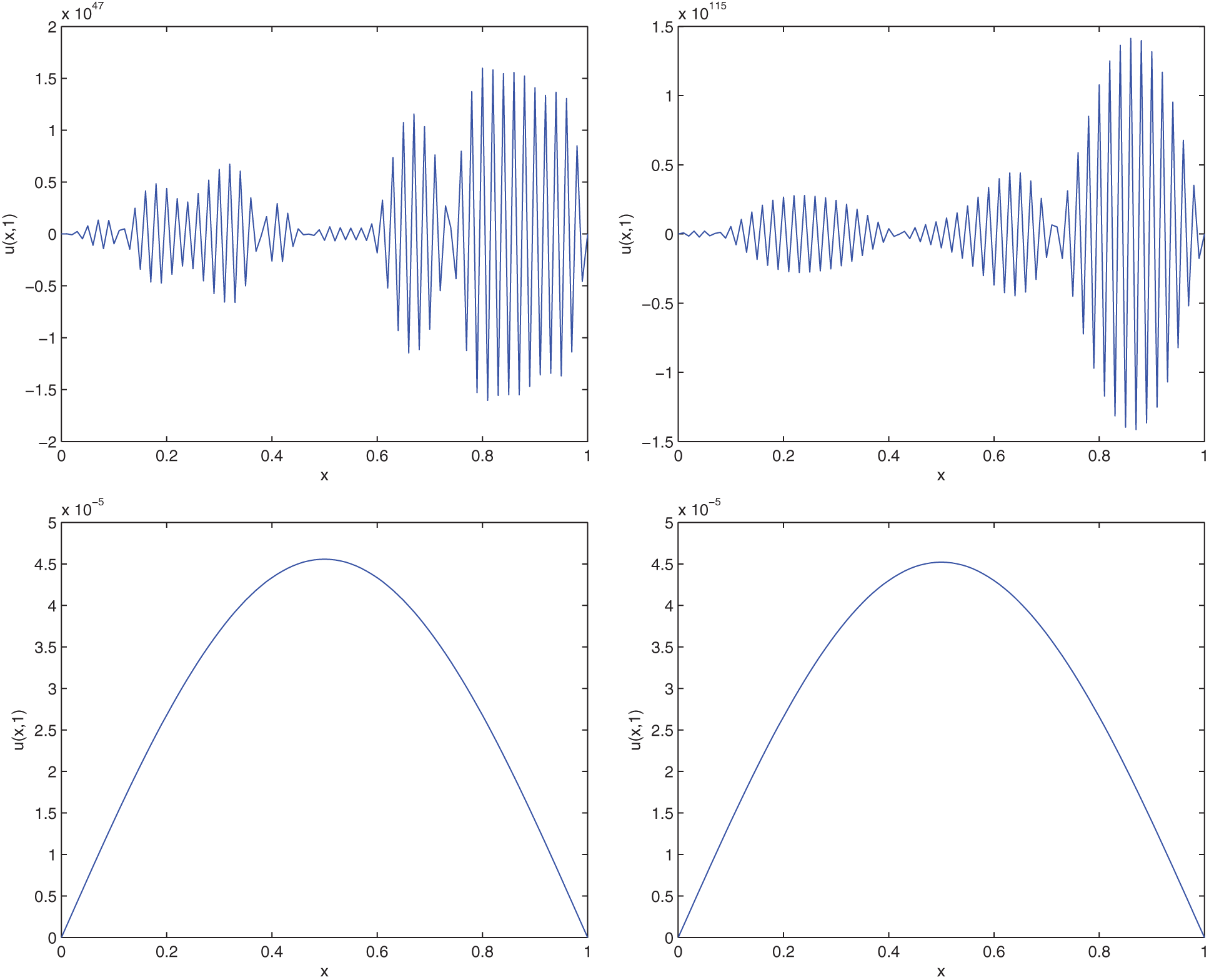
Figure 4: Display of conditional stability for various values of N = 400, 1000, 4000, 4100 (Example 3.2)
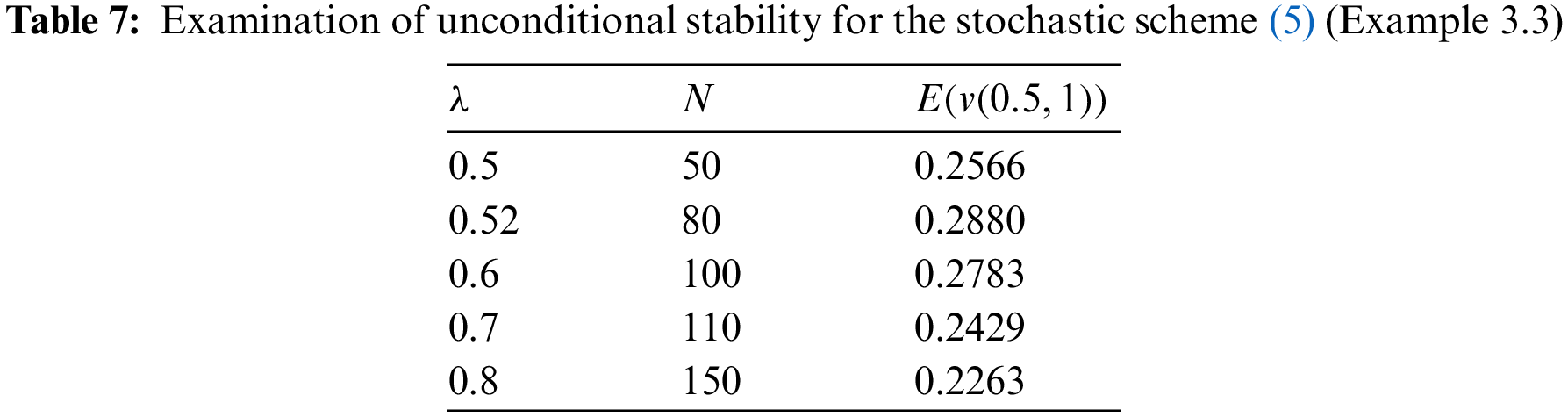
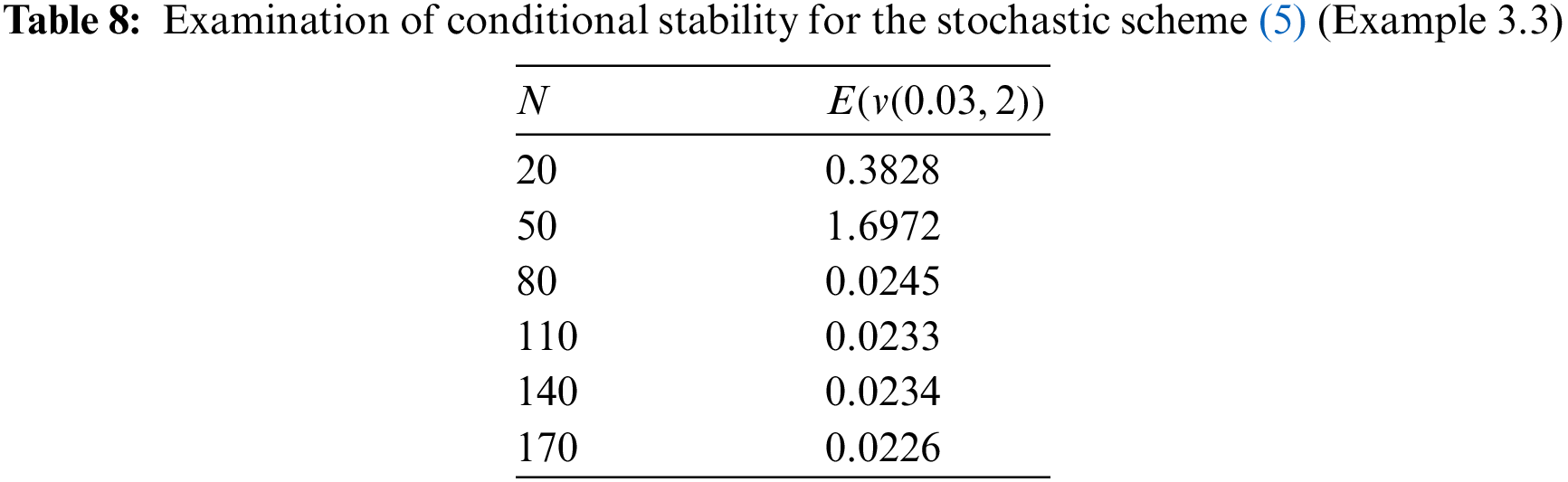
Example 3.3. As the third example, consider the following problem:
Fig. 5 shows the approximation of SPDE (39) using the stochastic difference scheme (5) with the values
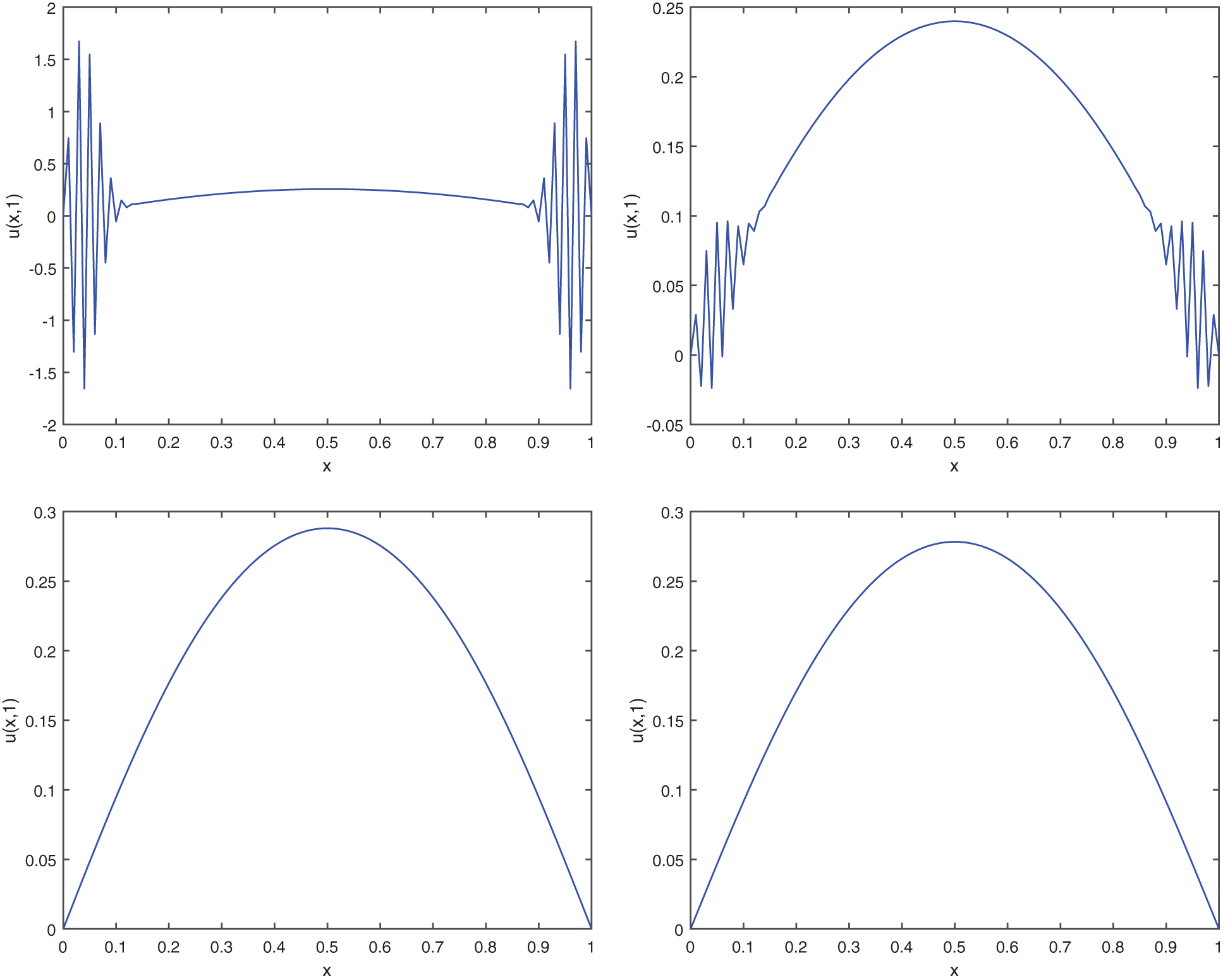
Figure 5: Display of conditional stability for various values of N = 50, 60, 80, 100 (Example 3.3)
This study presented a numerical method based on the weighted average finite difference scheme for the solution of SPDEs. In this paper, we provided some mathematical analyses for the proposed numerical scheme. To ascertain the accuracy and efficacy of the proffered technique, we presented three numerical examples with different boundary conditions, and compared the associated numerical results with the exact solution. Additionally, we explored the necessary conditions for the conditional and unconditional stability of the presented method and verified the theoretical consequences in this regard by some figures and tables.
Future works can be focused on applying some new discrete schemes, such as those discussed in [22] with a second-order time convergence rate, for the numerical solution of stochastic problem studied in this paper.
Acknowledgement: The authors would like to express their deep gratitude to Dr. Fahimeh Akhavan Ghassabzade for her valuable assistance during the development of this research work.
Funding Statement: The authors received no specific funding for this study.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Zakai, M. (1969). On the optimal filtering of diffusion processes. Zeitschrift für Wahrscheinlichkeitstheorie und Verwandte Gebiete, 11, 230–243. DOI 10.1007/BF00536382. [Google Scholar] [CrossRef]
2. Mikulevicius, R., Rozovskii, B. L. (2004). Stochastic navier-stokes equations for turbulent flows. SIAM Journal on Mathematical Analysis, 35, 1250–1310. DOI 10.1137/S0036141002409167. [Google Scholar] [CrossRef]
3. Dawson, D. A., Perkins, E. A. (1999). Measure-valued processes and renormalization of branching particle systems. In: Carmona, R. A., Rozovskii, B. (Eds.Stochastic partial differential equations: Six perspectives, pp. 45–106. Providence, RI: American Mathematical Society. [Google Scholar]
4. Roques, L., Allard, D., Soubeyrand, S. (2022). Spatial statistics and stochastic partial differential equations: A mechanistic viewpoint. Spatial Statistics, 50, 100591. DOI 10.1016/j.spasta.2022.100591. [Google Scholar] [CrossRef]
5. Wang, J., Pang, X., Yin, F., Yao, J. (2022). A deep neural network method for solving partial differential equations with complex boundary in groundwater seepage. Journal of Petroleum Science and Engineering, 209, 109880. DOI 10.1016/j.petrol.2021.109880. [Google Scholar] [CrossRef]
6. Prato, G. D., Tubaro, L. (1992). Stochastic partial differential equations and application. Boca Raton: CRC Press. [Google Scholar]
7. Yasin, M. W., Iqbal, M. S., Ahmed, N., Akgül, A., Raza, A. et al. (2022). Numerical scheme and stability analysis of stochastic fitzhugh-nagumo model. Results in Physics, 32, 105023. DOI 10.1016/j.rinp.2021.105023. [Google Scholar] [CrossRef]
8. Kaur, N., Goyal, K. (2022). An adaptive wavelet optimized finite difference B-spline polynomial chaos method for random partial differential equations. Applied Mathematics and Computation, 415, 126738. DOI 10.1016/j.amc.2021.126738. [Google Scholar] [CrossRef]
9. Guo, L., Wu, H., Zhou, T. (2022). Normalizing field flows: Solving forward and inverse stochastic differential equations using physics-informed flow models. Journal of Computational Physics, 461, 111202. DOI 10.1016/j.jcp.2022.111202. [Google Scholar] [CrossRef]
10. Roth, C. (2002). Difference methods for stochastic partial differential equations. Journal of Applied Mathematics and Mechanics, 82, 821–830. [Google Scholar]
11. Bishehniasar, M., Soheili, A. R. (2013). Approximation of stochastic advection-diffusion equation using compact finite difference technique. Iranian Journal of Science & Technology, 327–333. [Google Scholar]
12. Soheili, A. R., Niasar, M. B., Arezoomandan, M. (2011). Approximation of stochastic parabolic differential equations with two different finite difference schemes. Bulletin of the Iranian Mathematical Society, 37, 61–83. [Google Scholar]
13. Kamrani, M., Hosseini, S. M. (2010). The role of the coefficients of a general SPDE on the stability and convergence of the finite difference method. Journal of Computational and Applied Mathematics, 234, 1426–1434. DOI 10.1016/j.cam.2010.02.018. [Google Scholar] [CrossRef]
14. Sweilam, N. H., ElSakout, D. M., Muttardi, M. M. (2020). Compact finite difference method to numerically solving a stochastic fractional advection-diffusion equation. Advances in Difference Equations, 2020, 189. DOI 10.1186/s13662-020-02641-w. [Google Scholar] [CrossRef]
15. Sweilam, N. H., ElSakout, D. M., Muttardi, M. M. (2020). High-resolution schemes for stochastic nonlinear conservation laws. International Journal of Applied and Computational Mathematics, 6, 22. DOI 10.1007/s40819-020-0775-z. [Google Scholar] [CrossRef]
16. Arezoomandan, M., Soheili, A. R. (2021). Spectral collocation method for stochastic partial differential equations with fractional brownian motion. Journal of Computational and Applied Mathematics, 389, 113369. DOI 10.1016/j.cam.2020.113369. [Google Scholar] [CrossRef]
17. Kamrani, M., Hosseini, S. M. (2021). Spectral collocation method for stochastic burgers equation driven by additive noise. Mathematics and Computers in Simulation, 82, 1630–1644. DOI 10.1016/j.matcom.2012.03.007. [Google Scholar] [CrossRef]
18. Namjoo, M., Mohebbian, A. (2016). Approximation of stochastic advection diffusion equations with finite difference scheme. Journal of Mathematical Modeling, 4(1), 1–18. [Google Scholar]
19. Namjoo, M., Mohebbian, A. (2019). Analysis of the stability and convergence of a finite difference approximation for stochastic partial differential equations. Computational Methods for Differential Equations, 7(3), 334–358. [Google Scholar]
20. Kloeden, P. E., Platen, E. (1995). Numerical solution of stochastic differential equations. Berlin: Springer. [Google Scholar]
21. Thomas, J. W. (1998). Numerical partial differential equations: Finite difference methods. New York: Springer. [Google Scholar]
22. Liu, Y., Du, Y., Li, H., Liu, F., Wang, Y. (2019). Some second-order
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools