
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Role Dynamic Allocation of Human-Robot Cooperation Based on Reinforcement Learning in an Installation of Curtain Wall
1 School of Control and Mechanical Engineering, Tianjin Chengjian University, Tianjin, 300384, China
2 Comprehensive Business Department, CATARC (Tianjin) Automotive Engineering Research Institute Co., Ltd., 300339, China
3 School of Mechanical Engineering, Hebei University of Technology, Tianjin, 300130, China
* Corresponding Author: Jian Zhao. Email:
(This article belongs to the Special Issue: Machine Learning-Guided Intelligent Modeling with Its Industrial Applications)
Computer Modeling in Engineering & Sciences 2024, 138(1), 473-487. https://doi.org/10.32604/cmes.2023.029729
Received 05 March 2023; Accepted 09 May 2023; Issue published 22 September 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
A real-time adaptive roles allocation method based on reinforcement learning is proposed to improve human-robot cooperation performance for a curtain wall installation task. This method breaks the traditional idea that the robot is regarded as the follower or only adjusts the leader and the follower in cooperation. In this paper, a self-learning method is proposed which can dynamically adapt and continuously adjust the initiative weight of the robot according to the change of the task. Firstly, the physical human-robot cooperation model, including the role factor is built. Then, a reinforcement learning model that can adjust the role factor in real time is established, and a reward and action model is designed. The role factor can be adjusted continuously according to the comprehensive performance of the human-robot interaction force and the robot’s Jerk during the repeated installation. Finally, the roles adjustment rule established above continuously improves the comprehensive performance. Experiments of the dynamic roles allocation and the effect of the performance weighting coefficient on the result have been verified. The results show that the proposed method can realize the role adaptation and achieve the dual optimization goal of reducing the sum of the cooperator force and the robot’s Jerk.Graphic Abstract
Keywords
With the research on human-robot cooperation and intelligent robot technology, we recognize that tasks can be completed more efficiently and smoothly by endowing the robot with specific initiatives [1,2]. Many studies have examined the claim that the human is the leader and the robot is the follower during cooperation [3]. As auxiliary equipment, the robot can help the human increase or decrease force by collecting interactive signals, reducing the partner’s working intensity [4]. That researches mainly focus on master-slave and follow-up robot control algorithms [5,6]. However, in some practical tasks, human and robots must be leaders and followers [7,8]. An additional complication is that the roles of leader and follower may need to be changed during the task. Several researchers have addressed the issue of the different roles of humans and robots in cooperative tasks. For example, Lawitzky et al. [9] have shown that task performance is improved through a higher degree of assistance by the robot in the human-robot moving an object task. Some researchers [10–12] have tried to create a continuous function by rapidly switching between two distinct extreme behaviors (leader and follower) to change the cooperative role. In order to develop assistance adaptation schemes, Passenberg and others present a force-based criterion for distinguishing between the two scenarios and introduce an approach to optimize the assistance levels for each scenario [13]. According to the observation that human-human interaction is not defined as a proportion of role allocation in advance, some researchers try to study approaches that allow online investigation of the dominance distribution between partners depending on different situations [14]. For comparing the cooperation performance from the fixed role method and the adaptive control role switching method, some researchers [15,16] investigated a method for the simultaneous switching of two roles between a robot and a human participant. They have proven that the adaptive online role-adjusting method has a higher success rate than the fixed role method.
In the recent related research work, literature [17] is a further study of the dynamic role assignment (RDA) algorithm [15,16] based on the homotopy method. Robots know the target location and task content to plan their motion trajectory, while humans act as task correctors. Specifically, when the robot plays the “leader” role, the robot follows a pre-planned trajectory; When the robot’s movement track does not meet the task requirements, the human plays the role of ‘leader’ and intervenes (corrects) the robot’s movement. However, the robot’s trajectory cannot be planned in tasks with unknown and variable targets. Therefore, the above RDA method is no longer applicable, as shown in the scene of the human-robot Cooperative curtain wall assembly in Fig. 1. A three-module framework (HMRDA) of human-robot cooperative motion target prediction module, role dynamic assignment module, and robot motion planning module was designed, and a dynamic role assignment method based on goal prediction and fuzzy reasoning was proposed [18]. According to motion information and prediction information, the robot can adjust its role in human-robot cooperative motion to change the motion trajectory. However, the above HmrDA-based approach can change the binary problem where the role is only leader and follower, rather than the role adjusting more weight to the leader or follower. In addition, the premise of changing the role is that the robot can accurately recognize human intention. Compared with the dynamic adjustment of role, the article’s authors [18] have contributed more to the recognition of robot intention.
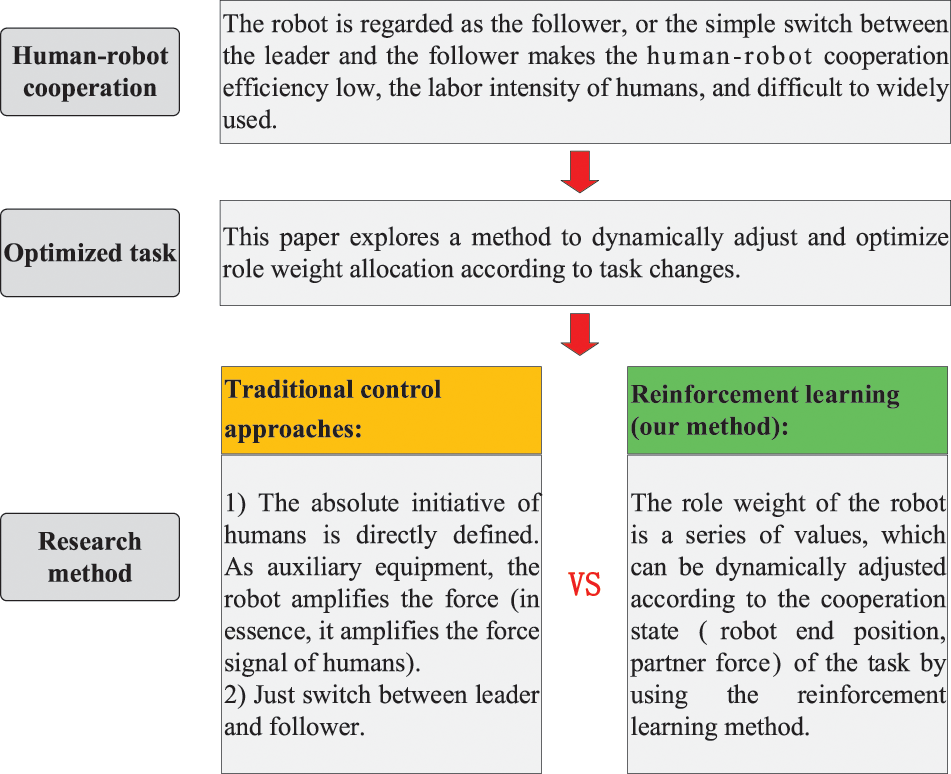
Figure 1: The architecture of the relationship among the optimized task, research methods, and the human-robot cooperation
Reinforcement learning is often an effective method to solve the problem of parameter recognition or robot imitation learning in human-robot cooperation [19]. Like the role allocation problem, reinforcement learning is often used to learn model-free strategies in practical robot control. The online, self, and adaptive learning algorithm is applied not only in human-robot cooperation but also in the problems of dynamic parameter difficulty and nonlinear control. For example, in literature [20], they adopt reinforcement learning methods constructed a control policy inside the multi-dimensional chaotic region to solve the problem of higher-order, coupled, 3D under-actuated manipulator with non-parametric uncertainties, control signal delay (input delay), and actuator saturation. Literature [21] proposed a reinforcement learning method called the ‘CPGactor-critic’ to control a humanoid robot leg, which can successfully control a system with a large DOF but a small number of actor parameters. In addition, the excessive increase in the input dimensionality of the critic could be avoided. The above literature methods provide ideas for using reinforcement learning to solve the role assignment problem in human-robot interaction in this paper.
In this paper, we use reinforcement learning to adjust the roles allocation of the human and robot so that we can install the glass curtain wall unit more efficiently and quickly. First, the physical human-robot cooperation model, including the role factor, is built. Second, a reinforcement learning model which can adjust the role factor in real-time is established, and a reward and action model are designed. The role factor can be adjusted continuously according to the comprehensive performance of the human-robot interaction force and robot’s Jerk during the repeated installation process. Finally, the experiments of the dynamic role allocation and the effect of the performance weighting coefficient on the result have been verified. The results show that the proposed method can realize the role adaptation and achieve the dual optimization goal of reducing the sum of the cooperator’s force and the robot’s Jerk. Compared with the existing role allocation methods, the established role model is not only a leader and a follower but a more precise division of roles, which is more suitable for occasions when the boundary between the leader and the follower is blurred in tasks. In addition, the enhanced learning algorithm is used to learn the changing rules of the role. The intelligence of the robot is enhanced by imitating the idea that human beings use incentives and training methods to improve intelligence to explore and solve the problems caused by the robot mental retardation in man-machine cooperation, such as low cooperation efficiency, the heavy labor intensity of operators and application difficulties. The main contributions of this work are as follows: (1) The role adjustment model and comprehensive performance model of man-machine cooperation are established. (2) A dynamic role assignment method based on reinforcement learning is proposed. Robots can adjust their role in the man-machine cooperative movement in real-time according to the changes in cooperative tasks, giving full play to the advantages of humans and robots.
An architecture is created to visualize the relationship among the optimized task, traditional control approaches, reinforcement learning, and human-robot cooperation, as shown in Fig. 1.
Fig. 1 shows that this paper transforms the role allocation problem in human-robot cooperation into a dynamic adaptive optimization problem. It compares the differences between traditional control methods and the proposed methods in robot role allocation.
In this paper, we assume that one scene in which the human is collaborating with the robot to complete an installation task of a glass curtain wall, as shown in Fig. 2. There is a two-step process. (1) the curtain wall should be moved to near the preinstallation location rapidly in the low-restricted area; (2) the curtain wall should be precisely installed into the frame in the high-restricted area. In step (1), there is a bigger space of movement, the efficiency of the movement should be concerned, and the effort from the human should be minimized. However, step (2), it is an accurate installing mission, and the curtain wall stability of the robot end-effector under multi-force action should be more concerned than the human’s effort.
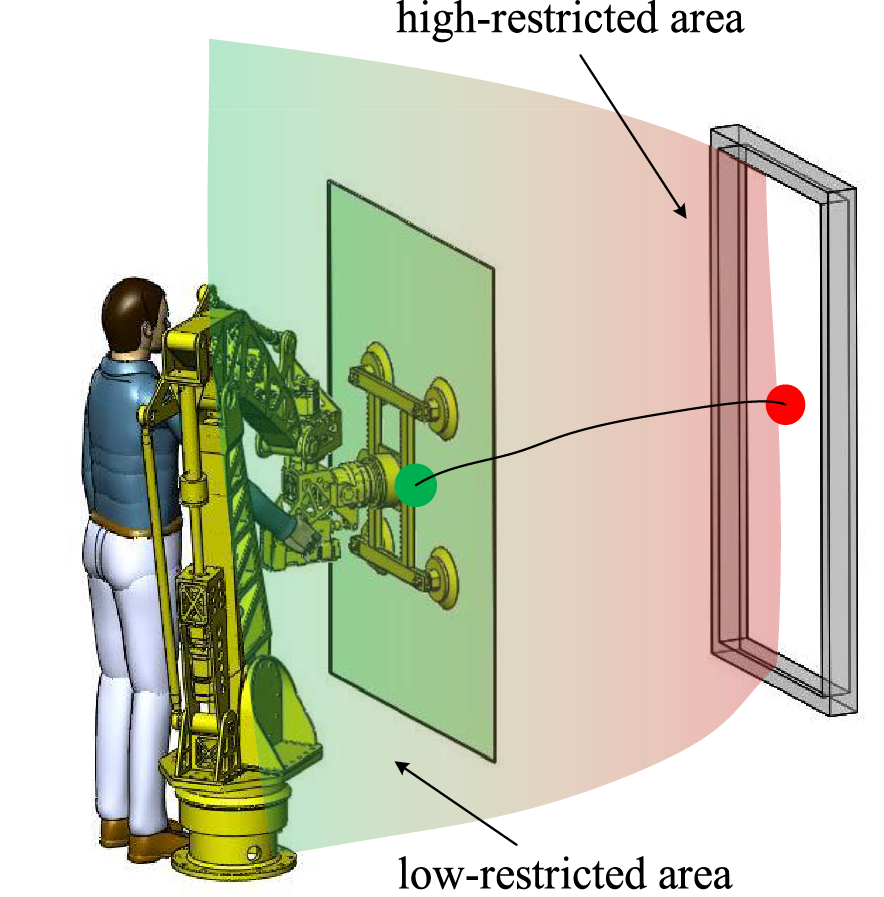
Figure 2: Human-robot cooperation system schematic diagram of curtain wall installation
Note: The knowledge of the high-restricted and low-restricted areas of the robot is not given, and the high-restricted and low-restricted have no apparent boundaries.
2.2 Human-Robot Cooperation Model and Evaluation Model
A force-based physical cooperation model is built and discussed. The application scenario involves one human and one robot to do a lifting task, as shown in Fig. 3. In this paper, 1 DOF case is established as a research model. However, the definitions may also be valid for more DOFs and partners.
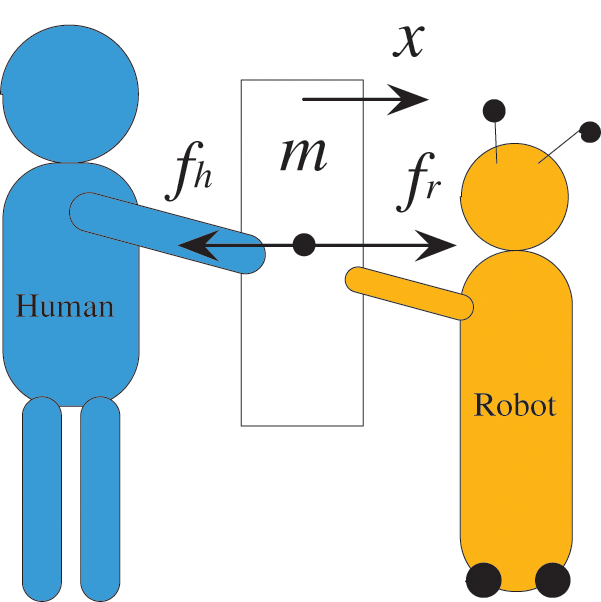
Figure 3: Cooperative model based on force interaction in a lifting task
In Fig. 3,
where,
From previous studies [14], the expression forms of the contribution level to the contributions for moving the object can be described as follows:
where, the
a) Force Model of Human
The total energy paid by the collaborator or the sum of the interaction force from the human is generally used to be described to evaluate the human’s effort in the cooperation process [14]. The total energy from the partner to complete the task is challenging to measure directly during the cooperation process. However, the total force of the collaborator is more easily measured. Therefore, the partner’s force sum is used to estimate the partner’s effort in this paper. The sum of the force model of the human THF (Total Human Force) is established in Eq. (3):
where,
b) Compliant Model of Robot
In the field of robotics, the Jerk is often used to describe the flexibility of a robot. The smaller the Jerk is, the smoother the system is. In this paper, the sum of the Jerk is used to assess the end-point flexibility of the robot, and the compliant model of robot TJerk (Total Jerk) is established in Eq. (4):
where, the
c) Comprehensive Evaluation Model
A comprehensive evaluation model that reflects human effort and robotic compliance is estimated to evaluate the performance of human-robot cooperation in this paper, and it is defined as follows:
where,
In Eq. (6), if the weighting factor is designed as
3 Dynamic Role Adaptive Allocation Design
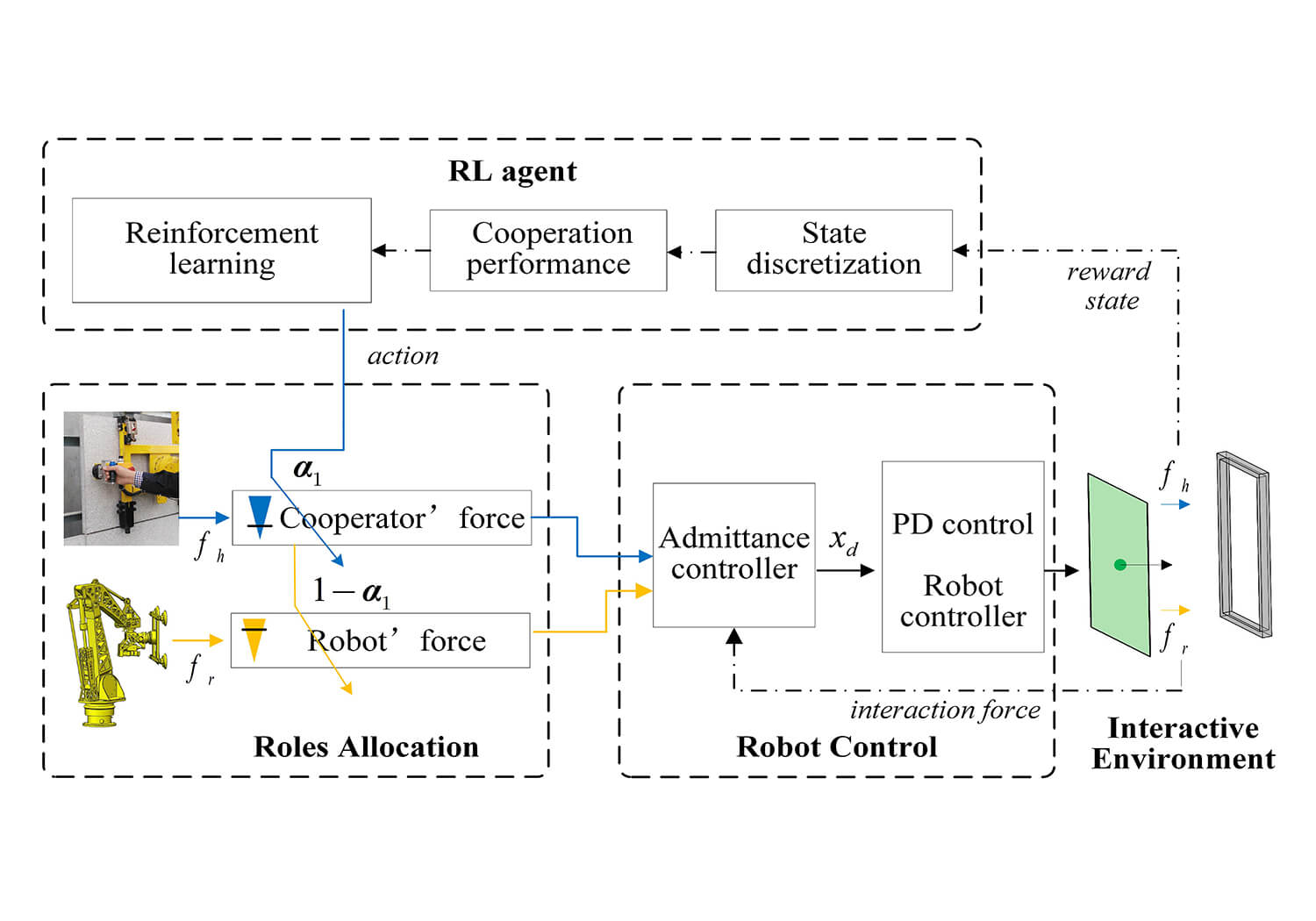
Reinforcement learning is a method that can realize adaptive parameter adjustment online and establish the relationship between action and state uncertainty according to the target. In this paper, this method is used to adjust role parameters during the process of cooperation. The overall architecture of the method is shown in Fig. 4.

Figure 4: Roles allocation method based on reinforcement learning in human-robot cooperation
In Fig. 4,
where,
This paper proposes a reinforcement learning model to change roles allocation weight during the installation of glass curtain walls in human-robot cooperation, as shown in Fig. 5.

Figure 5: Principle diagram of dynamic role allocation based on reinforcement learning method
Here the roles allocation value
where,
In this paper, we aim to adjust the roles allocation weight
In the physical human-robot cooperation system, the reward in reinforcement learning should be designed to be associated with comprehensive performance. It is based on minimizing the robot’s Jerk and minimizing the partner’s effort. The return value of cooperation performance is described as follows by formula (9):
where,
where,
where, k is an integer greater than zero, and it is the asynchronous adjustment coefficient. The function of the asynchronous adjustment coefficient is to enhance the system’s robustness by setting the sampling frequency of the reinforcement learning return value less than the robot control frequency.
At the end of each traversal, the total return value of the traversal can be obtained to evaluate the cooperation performance. The sum of return values is shown as follows:
4.1 Experimental Setup and Experimental Design
In order to verify the effectiveness of the method proposed in this paper, an experimental platform was designed for human-robot cooperation to complete the curtain wall installation task, as shown in Fig. 6.
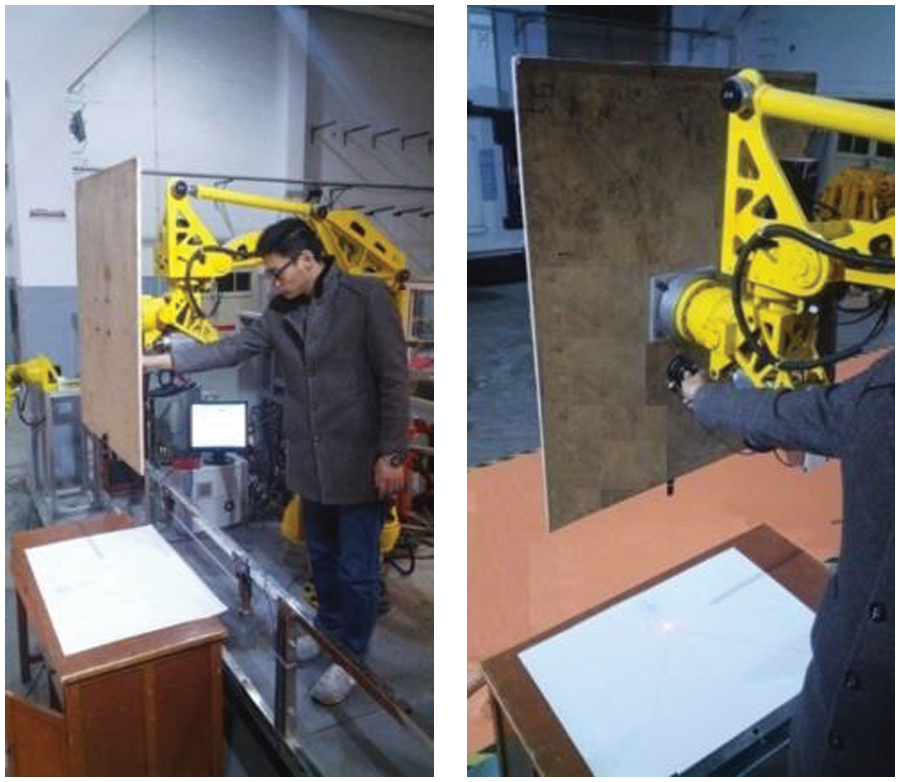
Figure 6: Curtain wall installation experimental platform by physical human-robot cooperation
In the experiment, to simulate the installation process and avoid the risk of collision in the actual experimental environment, a laser pointer was fixed to the curtain wall, and a laser point was used to indicate the location of the curtain wall. The curtain wall position indicator experimental device is shown in Fig. 7.

Figure 7: Curtain wall position indicator experimental device
In the installation process of the curtain wall, the movement track can be divided into the low-restricted area and the high-restricted area. In the low-restricted area, the robot has plenty of room to move, and more attention should be paid to the speed of movement and less effort of the partner than to the movement accuracy of the curtain wall. Contrary to the low-restricted area, in the high-restricted area, the movement accuracy of the curtain wall should be paid more attention than the speed of movement and the effort of the collaborator.
Here are the steps:
1) Firstly, the laser point representing the position of the curtain wall was located in the low-restricted area, which was the starting point. Following the robot’s movement, the location of the laser point was operated according to the interaction force from a six-dimensional force sensor.
2) Secondly, the laser point was controlled to move quickly to the high-restricted area entrance.
3) Thirdly, the operator, ensuring that the laser point does not collide with the boundary of the high-restricted area as much as possible, continues to control the robot towards the target point.
4) The curtain wall was considered to have reached the target point when the distance between the laser point and the end position of the drawing board was less than a specific value. Then the robot will automatically return to the original position.
5) Repeated steps 1)–4) until the value of the variable that reinforcement learning levels off.
4.2 Experimental Parameters Design
In order to obtain the continuous state input vector
In this study, the system frequency was set to 1000 Hz, and the frequency of the reinforcement learning was set to 100 Hz. That was the k = 10 in the formula (10). The learning rate was designed to be
5 Experimental Results and Performace Assessment
5.1 Dynamic Role Adaptive Allocation Results
The relationship between human-robot cooperation performance and the roles allocation weight was established with changes in the cooperative performance as the number of iterations increased in this experiment, as shown in Fig. 8. The experiment was repeated 30 times by operating the robot from its initial position to its destination. In this process, collisions should be avoided whenever possible by observing the position of the laser point. The comprehensive performance model consisting of robot’s Jerk and human-robot interaction force that were regarded as equally important (
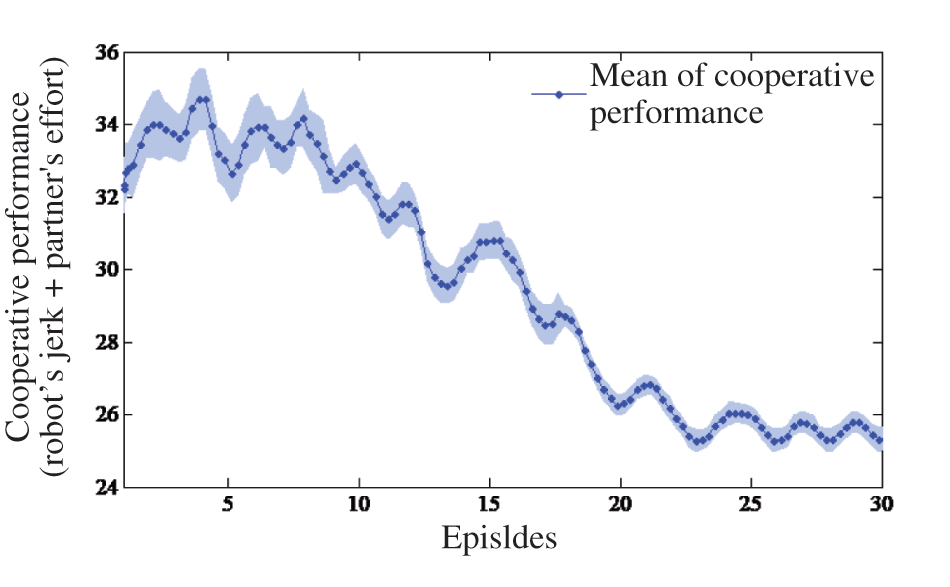
Figure 8: Relationship between number of iterations and cooperative performance
As can be seen from Fig. 8, with the increase in the number of iterations, the comprehensive performance value composed of Jerk and the efforts of the cooperator showed a downward trend. When the number of iterations was more than 25 times, the comprehensive performance value tended to be stable. This experiment showed that it effectively improved robot flexibility and reduced human-robot force by changing the role weight based on reinforcement learning.
In order to evaluate the efficiency of task completion as learning progresses, the relationship between the number of iterations times and task completion time was established, as shown in Fig. 9.
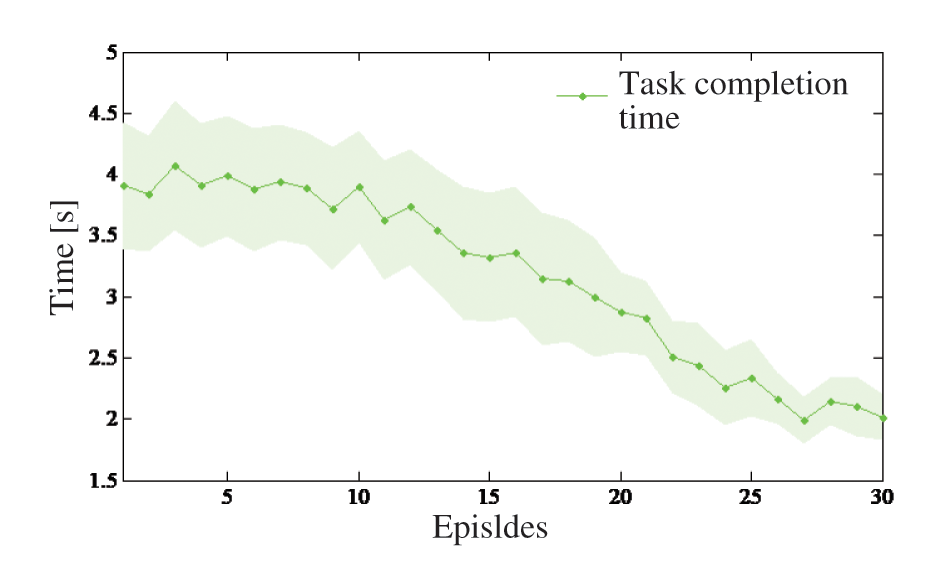
Figure 9: Relationship between number of iterations times and task completion time
From Fig. 9, the time for task completion decreases as the number of iterations increases. When the number of iterations was more than 25 times, the decline of the task completion time was slow and steady. It has shown that the roles allocation method based on reinforcement learning was a great way to improve task completion efficiency.
The Fig. 10 shows the mean value

Figure 10: The mean value of the last five iterations of the collaborator’s role over time t
The relationship between the partner’s force and time t for the last five times was established, as shown in Fig. 11. The force change trend of the partner was similar to the collaborator’s role, which was first more prominent, then decreased, and then increased. This pattern of change is consistent with the relationship between the change of force and the role. The greater the weight of the partner’s role, the greater the force applied.

Figure 11: Relationship between the partner’s force and time t for the last 5 times
The cooperation performance of the dynamically changing roles according to the method proposed in this paper and the different fixed role weights was established, as shown in Fig. 12. The result has verified that the continuous adjustment of roles based on the reinforcement learning method was more conducive to the performance of human-robot cooperation than the fixed roles.

Figure 12: Cooperation performance of fixed and adaptive role based reinforcement learning
In Fig. 12, the fixed roles were designed with six levels, which were the
5.2 Effect of Performance Weighting Coefficient on the Result
In the above experiment, the robot’s Jerk and human-robot interaction force were regarded as equally important (
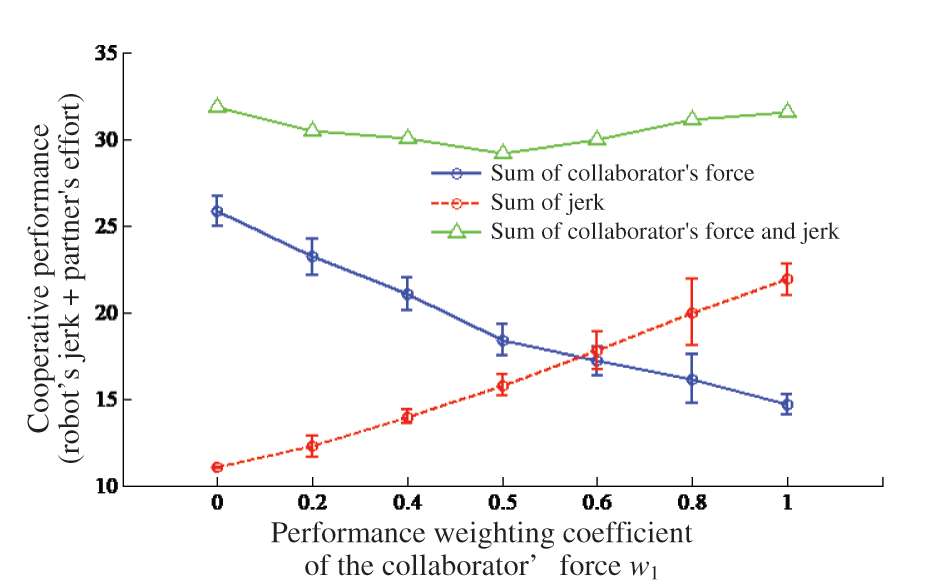
Figure 13: The relationship between overall performance and different performance weighting coefficient of the partner’ force
From Fig. 13, the Jerk was set as the only goal in reinforcement learning when the
In this paper, according to the dynamic role allocation problem in contact human-robot cooperation, an online role allocation method based on reinforcement learning is proposed for a curtain wall installation task. First, the physical human-robot cooperation model, including the role factor, is built. Second, a reinforced learning model, including a reward model and action model, which can adjust the role factor in real-time, is established. The role factor can be adjusted continuously according to the comprehensive performance consisting of human-robot interaction force and robot’s Jerk during the repeated installation process. Finally, the comprehensive performance of the human-robot system can be continuously improved by the role adjustment rule established according to reinforcement learning. In order to verify the effectiveness of the proposed method, the dynamic role allocation regarding human force and Jerk and the effect of the performance weighting coefficient have been verified by experiments. The experimental results show that the proposed method can realize the dynamic adjustment of the human-robot role and achieve the dual optimization goal of reducing the sum of the cooperator’s force and the robot’s Jerk. The role assignment method based on reinforcement learning proposed in this paper is of great significance to physical human-robot cooperation. In future work, to further play the advantages of the role dynamic assignment algorithm proposed in this paper, we will improve the degrees of freedom to the role assignment factor to study. In addition, more complex reward models and execution models with more character values will be built. Meanwhile, the generality of this paper’s role dynamic assignment algorithm will be improved to extend it to more practical applications.
Acknowledgement: The authors express their gratitude to the editor and referees for their valuable time and efforts on our manuscript.
Funding Statement: The research has been generously supported by Tianjin Education Commission Scientific Research Program (2020KJ056), China, and Tianjin Science and Technology Planning Project (22YDTPJC00970), China. The authors would like to express their sincere appreciation for all support provided.
Author Contributions: Study conception and design: Zhiguang Liu, Jian Zhao; data collection: ShilinWang; analysis and interpretation of results: Zhiguang Liu, Fei Yu; draft manuscript preparation: Zhiguang Liu, Jianhong Hao. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data used in this paper is available in the paper.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Moertl, A., Lawitzky, M., Kucukyilmaz, A., Sezgin, M., Basdogan, C. et al. (2012). The role of roles: Physical cooperation between humans and robots. International Journal of Robotics Research, 31(31), 1656–1674. [Google Scholar]
2. Jarrasse, N., Sanguineti, V., Burdet, E. (2013). Slaves no longer: Review on role assignment for human robot joint motor action. Adaptive Behavior, 22(1), 70–82. [Google Scholar]
3. Passenberg, C., Peer, A., Buss, M. (2010). A survey of environment, operator, and task adapted controllers for teleoperation systems. Mechatronics, 20(7), 787–801. [Google Scholar]
4. Tsarouchi, P., Makris, S., Chryssolouris, G. (2016). Human robot interaction review and challenges on task planning and programming. International Journal of Computer Integrated Manufacturing, 29(8), 916–931. [Google Scholar]
5. Dimeas, F., Aspragathos, N. (2016). Online stability in human-robot cooperation with admittance control. IEEE Transactions on Haptics, 9(2), 267–278. [Google Scholar] [PubMed]
6. Lee, H. J., Kim, K. S., Kim, S. (2021). Generalized control framework for exoskeleton robots by interaction force feedback control. International Journal of Control, Automation and systems, 19, 3419–3427. [Google Scholar]
7. Kheddar, A. (2011). Human robot haptic joint actions is an equal control sharing approach possible. International Conference on Human System Interactions, pp. 268–273. Lisbon, Portugal. [Google Scholar]
8. Jarrasse, N., Charalambous, T., Burdet, E. (2012). A framework to describe, analyze and generate interactive motor behaviors. PLoS One, 7(11), e49945. [Google Scholar] [PubMed]
9. Lawitzky, M., Mortl, A., Hirche, S. (2010). Load sharing in human robot cooperative manipulation. 19th International Symposium in Robot and Human Interactive Communication, pp. 185–191. Viareggio, Italy. [Google Scholar]
10. Li, Y. N., Tee, K. P., Chan, W. L., Yan, R., Chua, Y. W. et al. (2017). Continuous role adaptation for human-robot shared control. IEEE Transactions on Robotics, 31(3), 672–681. [Google Scholar]
11. Hang, T., Ueha, R., Hirai, H., Miyazaki, F. (2010). A study on dynamical role division in a crank-rotation task from the viewpoint of kinetics and muscle activity analysis. IEEE/RSJ International Conference on Intelligent Robots & Systems, pp. 2188–2193. Taibei. [Google Scholar]
12. Jaberzadehansari, R., Karayiannidis, Y. (2021). Task-based role adaptation for human-robot cooperative object handling. IEEE Robotics and Automation Letters, 2(6), 3592–3598. [Google Scholar]
13. Passenberg, C., Groten, R., Peer, A., Buss, M. (2011). Towards real time haptic assistance adaptation optimizing task performance and human effort. IEEE World Haptics Conference, pp. 155–160. Istanbul, Turkey. [Google Scholar]
14. Gu, Y., Thobbi, A., Sheng, W. (2011). Human robot collaborative manipulation through imitation and reinforcement learning. IEEE/RSJ International Conference on Intelligent Robots & Systems, pp. 151–156. Shenzhen, China. [Google Scholar]
15. Evrard, P., Kheddar, A. (2009). Homotopy switching model for dyad haptic interaction in physical collaborative tasks. World Haptics Third Joint Eurohaptics Conference & Symposium on Haptic Interfaces for Virtual Environment & Tele-Operator Systems, pp. 45–50. Salt Lake City, USA. [Google Scholar]
16. Evrard, P., Kheddar, A. (2009). Homotopy-based controller for physical human-robot interaction. ROMAN 2009-The 18th IEEE International Symposium on Robot and Human Interactive Communication, pp. 1–6. Toyama, Japan. [Google Scholar]
17. Takagi, A., Li, Y., Burdet, E. (2021). Flexible assimilation of human’s target for versatile human-robot physical interaction. IEEE Transactions on Haptics, 14(2), 421–431. [Google Scholar] [PubMed]
18. Wang, C., Zhao, J. (2023). Role dynamic assignment of human-robot collaboration based on target prediction and fuzzy inference. IEEE Transactions on Industrial Informatics, 1–11. https://doi.org/10.1109/TII.2023.3266378 [Google Scholar] [CrossRef]
19. Modares, H., Ranatunga, I., Lewis, F. L. (2016). Optimized assistive human robot interaction using reinforcement learning. IEEE Transactions on Cybernetics, 46(3), 655–667. [Google Scholar] [PubMed]
20. Tutsoy, O., Barkana, D. E. (2021). Model free adaptive control of the under-actuated robot manipulator with the chaotic dynamics. ISA Transactions, 118, 106–115. [Google Scholar] [PubMed]
21. Nakamura, Y., Mori, T., Sato, M. A., Ishii, S. (2007). Reinforcement learning for a biped robot based on a CPG-actor-critic method. Neural Networks, 20(6), 723–735. [Google Scholar] [PubMed]
22. Dimeas, F., Aspragathos, N. (2015). Reinforcement learning of variable admittance control for human-robot co-manipulation. IEEE/RSJ International Conference on Intelligent Robots & Systems, pp. 1011–1016. Hamburg, Germany. [Google Scholar]
23. Seraji, H. (1994). Adaptive admittance control: An approach to explicit force control in compliant motion. IEEE International Conference on Robotics & Automation, pp. 2705–2712. San Diego, CA, USA. [Google Scholar]
24. Watkins, C. J. C. H., Dayan, P. (1992). Q-learning. Machine Learning, 8(3–4), 279–292. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools