
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Meyer Wavelet Transform and Jaccard Deep Q Net for Small Object Classification Using Multi-Modal Images
1 School of Electronic and Communication Engineering, Quanzhou University of Information Engineering, Quanzhou, 362000, China
2 College of Mechatronics and Control Engineering, Shenzhen University, Shenzhen, 518060, China
3 Hourani Center for Applied Scientific Research, Al-Ahliyya Amman University, Amman, 19111, Jordan
4 School of Computing, Skyline University College, University City Sharjah, Sharjah, 1797, United Arab Emirates
5 Department of Information Technology, College of Computer and Information Sciences, Princess Nourah bint Abdulrahman University, P.O. Box 84428, Riyadh, 11671, Saudi Arabia
6 Computer Science Department, King Abdullah II Faculty of Information Technology, University of Jordan, Amman, 11942, Jordan
7 School of Software, Northwestern Polytechnical University, Xi’an, 710072, China
8 Department of Engineering Technology, Fakulti Teknologi Dan Kejuruteraan Elektronik Dan Komputer (FTKEK), Universiti Teknikal Malaysia Melaka (UTeM), Melaka, 76100, Malaysia
9 Research Section, Faculty of Resilience, Rabdan Academy, Abu Dhabi, 22401, United Arab Emirates
* Corresponding Authors: Mian Muhammad Kamal. Email: ; Jamil Abedalrahim Jamil Alsayaydeh. Email:
Computer Modeling in Engineering & Sciences 2025, 144(3), 3053-3083. https://doi.org/10.32604/cmes.2025.067430
Received 03 May 2025; Accepted 15 July 2025; Issue published 30 September 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Accurate detection of small objects is critically important in high-stakes applications such as military reconnaissance and emergency rescue. However, low resolution, occlusion, and background interference make small object detection a complex and demanding task. One effective approach to overcome these issues is the integration of multimodal image data to enhance detection capabilities. This paper proposes a novel small object detection method that utilizes three types of multimodal image combinations, such as Hyperspectral–Multispectral (HS-MS), Hyperspectral–Synthetic Aperture Radar (HS-SAR), and HS-SAR–Digital Surface Model (HS-SAR-DSM). The detection process is done by the proposed Jaccard Deep Q-Net (JDQN), which integrates the Jaccard similarity measure with a Deep Q-Network (DQN) using regression modeling. To produce the final output, a Deep Maxout Network (DMN) is employed to fuse the detection results obtained from each modality. The effectiveness of the proposed JDQN is validated using performance metrics, such as accuracy, Mean Squared Error (MSE), precision, and Root Mean Squared Error (RMSE). Experimental results demonstrate that the proposed JDQN method outperforms existing approaches, achieving the highest accuracy of 0.907, a precision of 0.904, the lowest normalized MSE of 0.279, and a normalized RMSE of 0.528.Keywords
Object detection is crucial in fields like autonomous piloting and medical diagnosis but often relies on single modalities like Red green and blue (RGB) or Infrared (IR) imaging, which lack sufficient complementary information [1,2]. Advances in remote sensing imagery (RSI) have improved detection accuracy through multimodal integration, particularly combining RGB and IR [3,4]. While effective, these techniques are complex and challenging to apply in resource-limited environments, especially when processing large datasets from drones and satellites [5]. Small object detection plays a vital role in critical applications such as military surveillance, disaster response, and autonomous navigation. Another important area is medical imaging. In fields like oncology and neurology, detecting small lesions, tumors, or abnormalities at an early stage is essential for timely diagnosis and effective treatment [6,7]. Frameworks such as Vision Deep-AI demonstrate the growing demand for advanced detection solutions [8,9]. Infrared Small Object Segmentation (ISOS) faces unique challenges due to the small size, low visibility, and sparse distribution of objects in IR images [10]. These factors create a significant imbalance between objects and their background, complicating detection and localization. Effective segmentation is critical to minimize missed detections (MD) and false alarms (FA). Advanced techniques use machine learning to extract features, classify objects, and ensure precise localization and measurement [11]. Similarly, Deep learning (DL) is widely used for object localization and classification, offering superior performance when sufficient training data and computational resources are available [12–16]. Techniques like Convolutional Neural Networks (CNN) and Region-based CNN (R-CNN) utilize selective search algorithms to identify regions, extract features, and classify objects, though R-CNN has limitations in processing speed and scalability [17–20]. Advancements such as Spatial Pyramid Pooling (SPP) and Fast R-CNN address these issues by improving speed and integrating object localization and classification in a streamlined process [21]. Feature Pyramid Networks (FPN) further enhance detection by generating high-quality feature maps for classification and bounding tasks [22,23]. Additionally, novel approaches like wavelet-based encoder-decoder networks combine cross-modal attention and frequency-domain transforms for advanced video segmentation, supported by large-scale datasets [24,25].
In recent years, rapid advancements in remote sensing technologies have enabled the acquisition of high-dimensional and diverse image data from various platforms, including satellites, drones, and airborne sensors. However, traditional small object detection methods continue to face several critical challenges, which are given as follows:
• Small objects typically occupy only a few pixels, making them difficult to distinguish from background noise and clutter.
• In the traditional methods, the low spatial resolution, occlusion, poor contrast, and sparse object distribution factors further complicate the detection process across various image modalities.
• Most existing object detection techniques rely on single-modal data, limiting their ability to accurately detect small objects in complex and cluttered environments.
These limitations in conventional approaches highlight the need for more effective and robust detection methods. Consequently, these challenges serve as the primary motivation for developing a novel small object classification model.
The objectives of this research are mentioned as follows:
• To develop a novel small object detection framework that combines complementary information from multiple remote sensing modalities.
• To design an enhanced detection architecture, named JDQN by integrating the Jaccard similarity measure with DQN through regression modeling for improved object localization and classification.
• To employ a DMN to perform effective fusion of detection outputs from multiple modalities, thereby improving accuracy and reducing errors.
The key intent of this work is to devise a DL network for detecting small objects using RSI. In this method, the multimodal images are subject to various processes, such as preprocessing, image transformation, segmentation, feature extraction, detection, and fusion. The input images are fed to an Adaptive Kalman Filter (AKF) for denoising the image. Later, the image is transformed into the frequency domain from the spatial domain using the Meyer Wavelet Transform (MWT), and then the small objects in the image are segmented with the help of the Deepjoint segmentation. Afterward, the most noticeable features in the image are excerpted and then applied to the JDQN, which is formulated by incorporating the Jaccard similarity measure with DQN. Then, the obtained results are fused using the DMN to obtain the final detected output.
The significant contribution of this research is as follows:
• Proposed JDQN for small object detection: Small object detection is performed in this study using the JDQN, which integrates the Jaccard similarity measure into DQN using regression analysis. Further, the detected outputs obtained from the various modalities are fused using the DMN.
The structure of this paper is outlined as follows: Section 2 provides an overview of recent advancements in small object detection, Section 3 introduces the proposed JDQN approach, Section 4 presents the results along with their analysis, and Section 5 concludes the study.
Object detection is fundamental to many applications, but detecting small objects in remote sensing (RS) remains challenging due to their minimal size often reduced to a single pixel, and the scarcity of datasets caused by the difficulty of acquiring RS images. This segment reviews deep learning (DL)-based frameworks from the literature that inspired the development of the JDQN.
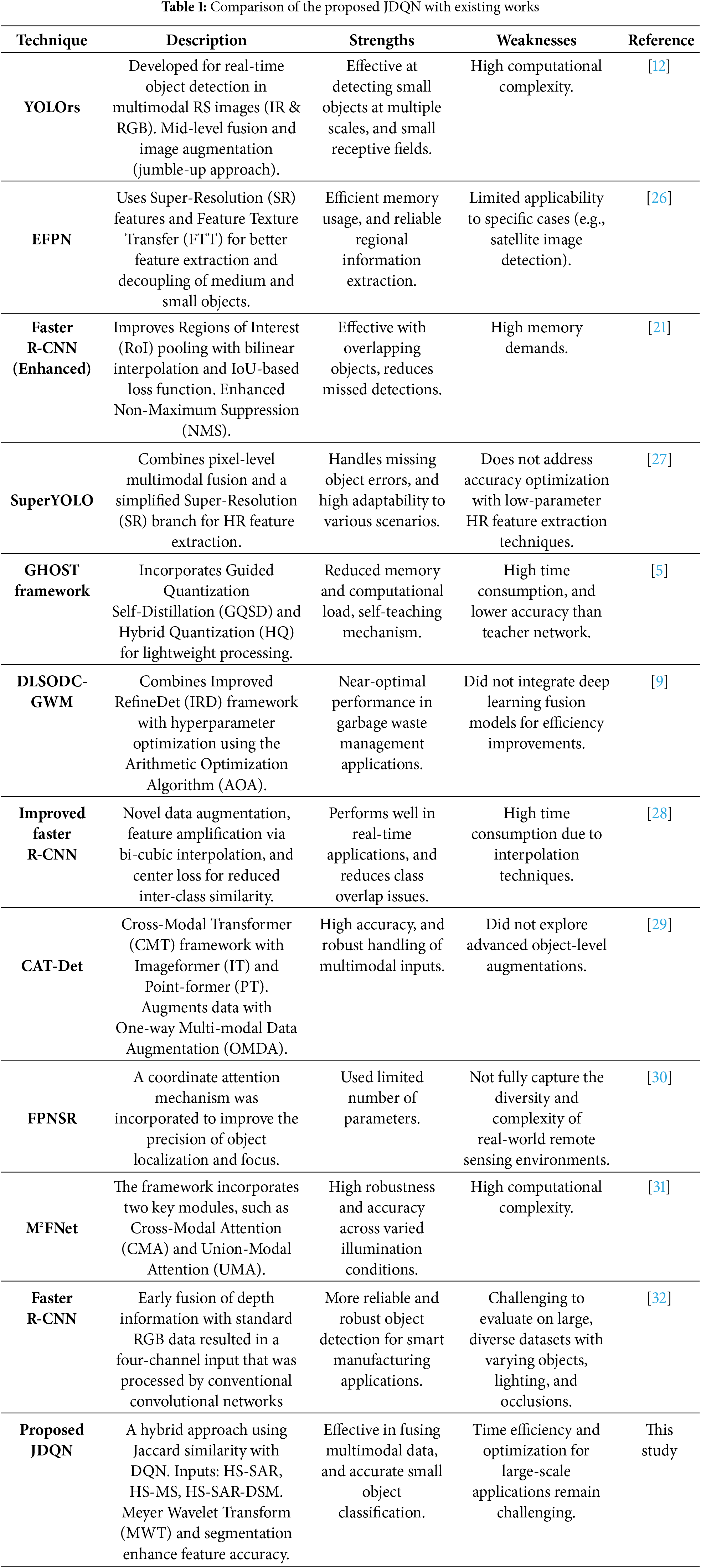
Several advanced frameworks have been developed for small object detection in remote sensing (RS) applications. The YOLOrs model [12] utilizes IR and RGB modalities along with a mid-level fusion framework for real-time detection, achieving multi-scale object detection with small receptive fields; however, this comes at a high computational cost. The Extended Feature Pyramid Network (EFPN) [26], enhances detection using Super-Resolution (SR) features and a Feature Texture Transfer (FTT) module, efficiently handling medium and small object detection while addressing the background-foreground imbalance. However, it lacks the integration of additional detectors for robustness. Faster region-based NN (Faster R-CNN) [21] improves object localization and bounding box regression through enhanced RoI pooling, multi-scale feature fusion, and Non-Maximum Suppression (NMS), reducing detection errors but demanding significant computational resources. In [27], SuperYOLO employs pixel-level multimodal fusion and a simplified SR branch to retain high-resolution features, effectively reducing detection errors while maintaining flexibility. However, it does not optimize accuracy through low-parameter models for feature extraction. Each approach demonstrates strengths and limitations, advancing small object detection in RS.
Several innovative approaches have been proposed for small object detection in various domains. The GHOST framework [5] introduced Guided Hybrid Quantization with One-to-one Self-Teaching (OST), leveraging Guided Quantization Self-Distillation (GQSD) to enable self-learning without external supervision, achieving reduced memory and computational demands but suffering from high time consumption. The DLSODC-GWM model [9] applied Improved Refine Det (IRD) for waste object detection and classification, optimizing hyperparameters using the Arithmetic Optimization Algorithm (AOA) and Functional Link Neural Network (FLNN) for classification, but lacked the integration of DL fusion models for enhanced efficiency. An Improved Faster R-CNN [28] was developed for industrial defect detection, addressing data imbalance with novel oversampling and stitching augmentation techniques and reducing inter-class similarity with center loss, though interpolation increased time consumption. The CAT-Det framework [29] employed a Cross-Modal Transformer (CMT) with Image-former (IT) and Point-former (PT) branches for multimodal 3D object detection, augmented by the One-way Multi-modal Data Augmentation (OMDA) method, achieving high accuracy but lacking object-level augmentations for further enhancement. Table 1 highlights the key differences and similarities between our work and previous studies, providing a clearer context for our contributions. The Feature Pyramid Network for Super Resolution (FPNSR) [30] was developed to enhance the detection of small objects. In this framework, a coordinate attention mechanism was incorporated to improve the precision of object localization and focus. The model was designed with a limited number of parameters, making it suitable for deployment on resource-constrained devices. However, the evaluation was conducted on a relatively small dataset, which may not fully capture the diversity and complexity of real-world remote sensing environments. Additionally, the Multi-Modal Fusion Network (M2FNet) [31], based on the Transformer architecture, was developed for object detection using multimodal data. The framework incorporates two key modules, such as Cross-Modal Attention (CMA) and Union-Modal Attention (UMA). While M2FNet demonstrates high robustness and accuracy across varied illumination conditions, its major limitation lies in the increased computational complexity introduced by the Transformer-based design. The Faster R-CNN [32] model was implemented for object detection using camera images, where early fusion of depth information with standard RGB data resulted in a four-channel input that was processed by conventional convolutional networks. This approach enabled more reliable and robust object detection for smart manufacturing applications. However, it was difficult to evaluate the model on larger datasets featuring diverse object configurations, lighting conditions, and occlusion scenarios.
2.2 Research Gaps of the Existing Methods
The difficulties encountered while reviewing the available strategies for small object classification are deliberated below.
• The key issue with YOLOrs [12] in object detection is that, while the technique is efficient at retrieving rich semantic information with limited tuning, the performance is affected by the confidence levels. A high confidence value results in false negatives, while a low value leads to the detection of undesired backgrounds.
• The EFPN technique designed in [26] performs well and effectively identifies medium and small objects. However, it struggles to adapt to specific small object detection scenarios, such as satellite image detection or face detection.
• In Faster R-CNN [21], the method offers superior results even in cases of overlapping objects. However, it requires high memory resources.
• The GHOST framework [5] is lightweight and demonstrates superior information retention capabilities. However, its accuracy is lower.
3 Proposed JDQN for Small Object Classification
Small object classification poses significant challenges due to limited information and low resolution, and applying the same object detection techniques across different environments is also challenging. This section expounds on the hybrid deep learning network named JDQN proposed in this study for classifying small objects. In this research, small object classification is carried out using three types of images, such as HS-SAR, HS-MS, and HS-SAR-DSM. The input images in the three modalities are subject simultaneously to pre-processing phase at first, where the Adaptive Kalman Filter (AKF) [33] is used to denoise the image thereby enhancing the image quality. After that, the pre-processed image is fed to the image transformation, where the denoised image is subject to Meyer Wavelet Transform (MWT) [34] to convert the image from the spatial domain to the frequency domain. Thereafter, segmentation of the small objects from the background region is accomplished using Deepjoint segmentation [35]. Further, various features, like oriented FAST and rotated BRIEF (ORB) [36], Local vector pattern (LVP) [37], and statistical features like mean, variance, standard deviation, kurtosis, and skewness are excerpted from the segmented image. Afterward, small object classification is performed by the proposed JDQN, which is developed by the incorporation of the Jaccard index [38] and Deep Q-Net [39].
Finally, the three resultant outputs are combined using the DMN [40] to get the final classified output. The various processes involved in small object classification using the proposed JDQN are depicted in Fig. 1. The flowchart of the proposed model is provided in Fig. 2.
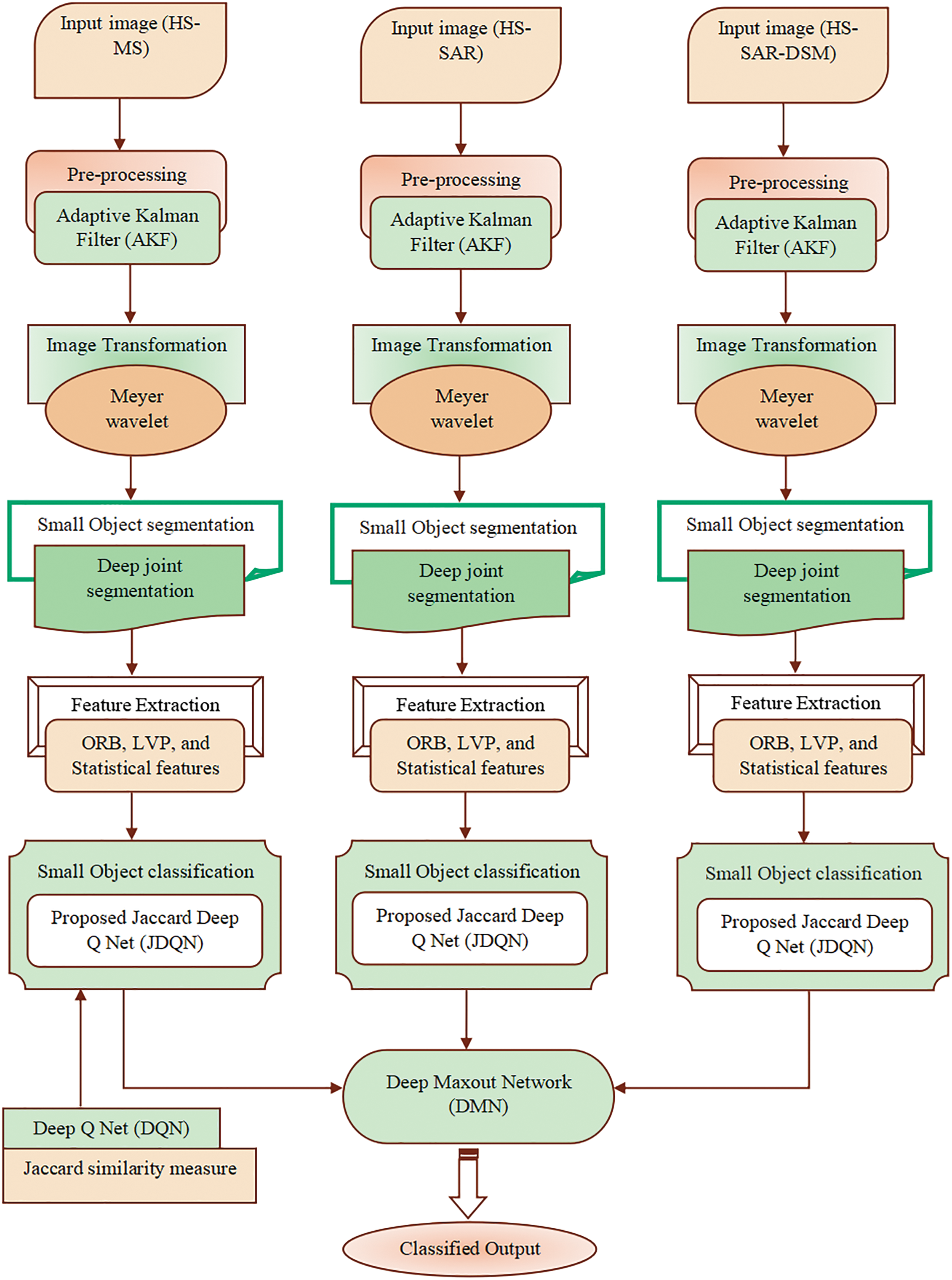
Figure 1: Block diagram for small object classification using the proposed JDQN

Figure 2: Flowchart of the proposed JDQN
The input images used for small object classification using the proposed JDQN are assimilated from a dataset
wherein,
The primary step in object classification is to pre-process the image using the AKF [33]. This is an essential task as noise in the images can degrade the classification ability of the JDQN. Though the Kalman filter is highly effective in processing the data accurately, the output attained is highly dependent on the previous information about the noise as well as the mathematical model. Hence, to overcome these issues, the AKF is used, which estimates and corrects uncertain and unknown noise and model parameters continuously during filtering. AKF is highly robust and produces filtered values that are near the true values. The following equation Eq. (2) is used to find the output of AKF.
where,
The denoised image
where,
Further, the wavelet spectrum is given by Eq. (5),
The MWT transforms the denoised image
The next process is to segment the object from the background using the wavelet-transformed output
Small object segmentation involves the following stages:
1. Joining, region fusion, and segment point generation.
2. Initially, the wavelet-transformed output Z is divided into multiple grids, and the pixels are merged based on the threshold and mean levels during the joining stage.
3. Afterward, region fusion is performed considering the bi-constraints and resemblance of the regions. Grids with the minimal mean value are merged to generate the mapped points.
4. Finally, the optimal segments are identified by calculating the distance between the segmented and deep points.
The following steps are used for segmenting small objects in the image. The iteration considered this segmentation is 100.
i) Grid creation: The primary process in segmenting the object from the background is to split the wavelet-transformed image
where,
ii) Joining: As soon as the grid is created, the pixels inside the grid are merged in the joining phase taking into account the threshold and mean values. Here, the average of the pixel values in the grid is measured to compute the mean and then, a constant threshold is used to process the mean for deciding whether a pixel has to be joined or not. In this work, a threshold value unity is considered, and the following in Eq. (7) is used to compute the mean.
Here,
wherein,
iii) Region fusion: The regions are fused in this stage by considering the allotted grids for creating a region fusion matrix. Fusion is accomplished after the matrix generation considering the similarity between the bi-constraints and pixel intensity. The region fusion is accomplished only when both constraints are satisfied.
(1) The mean value
(2) For each grid, a single grid point only has to be considered.
Using the two constraints above, the region similarity is determined and fusion of the regions is performed to identify the mapped points. The region similarity is depicted using Eq. (9),
where, the pixels merged in the joining process are termed as
wherein,
iv) Recognize deep points: The deep points are recognized by considering the mapped points and missed pixels in the joining stage. Pixels within the threshold boundary or left out during joining are considered missed pixels, as expressed in Eq. (11),
Here,
v) Recognize the best segments: An iterative process is carried out on the deep points to determine the optimal segments. Initially, the selection of the segmented points
vi) Termination: The phases are repeated until the finest segment points are attained.
In the above manner, the object region is segmented using the DeepJoint segmentation and the resultant output is signified as
The segmented image
i) LVP
LVP is generally utilized for reducing the feature length by minimizing the redundant information in the segmented image
where,
where,
ii) ORB
ORB [36] is a feature extraction approach that was created as an OpenCV and the features determined using are less sensitive to noise and produce superior results. The patch moment is used to compute the centroid of the segmented image
Here,
Further, the angle from the image patches to centroid is formulated in Eq. (18),
where,
The ORB and LVP features that are determined are merged to produce a textual feature image, which is expressed in Eq. (19),
where
iii) Statistical features
After determining the textual image feature
a) Mean
This feature is utilized for gauging the data concentration in the textual feature image
where,
b) Variance
This refers to the difference in the intensity of a pixel from the average value and is formulated in Eq. (21),
wherein,
c) SD
The distribution of data around the average value is known as SD, and is determined by considering the square root of the variance, and is given in Eq. (22),
wherein,
d) Kurtosis
The tiredness of the distribution by the normal distribution is known as kurtosis, and it is referred to as the “fourth normalized moment” also, and is measured by utilizing the following in Eq. (23),
where,
e) Skewness
Skewness is known as the degree of asymmetry of a specific feature about the mean value and is formulated as follows in Eq. (24),
wherein, skewness is symbolized as
The statistical features determined are concatenated to yield the feature vector, and are specified in Eq. (25),
where,
3.6 Small Object Classification Using Proposed JDQN
The feature vector
To overcome this limitation, the Jaccard similarity measure [38] is incorporated into the DQN using regression analysis to yield a finer result. The output
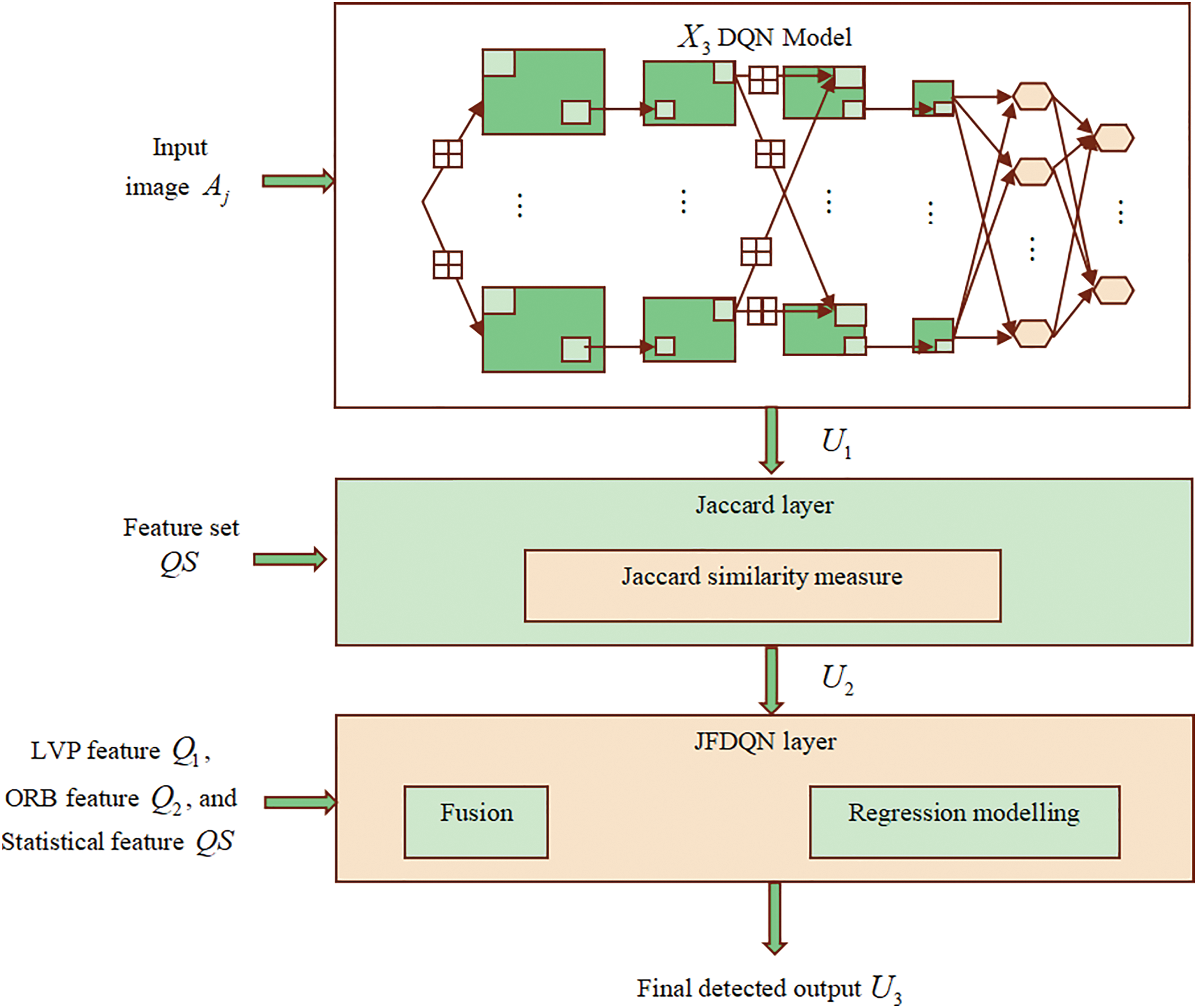
Figure 3: Structural view of the JDQN
The Deep Q-Network (DQN) [39,43] is a deep learning model that integrates Q-learning, a popular reinforcement learning (RL) approach, with deep neural networks (DNN) to estimate the Q-function’s action values. The anticipated discounted cumulative reward yields the active function value and is represented in Eq. (26),
where
RL approaches are used to find the ideal policy
In Q-learning, the ideal active function value is obtained by updating the value iteratively based on the following update in Eq. (28),
Here,
Here,
The target function
In DQN, the value of the action function is approximated by utilizing the DNN, and the DQN has two kinds of networks, such as the online and target networks. The value of
The equation given above can be rephrased in Eq. (32),
The output generated
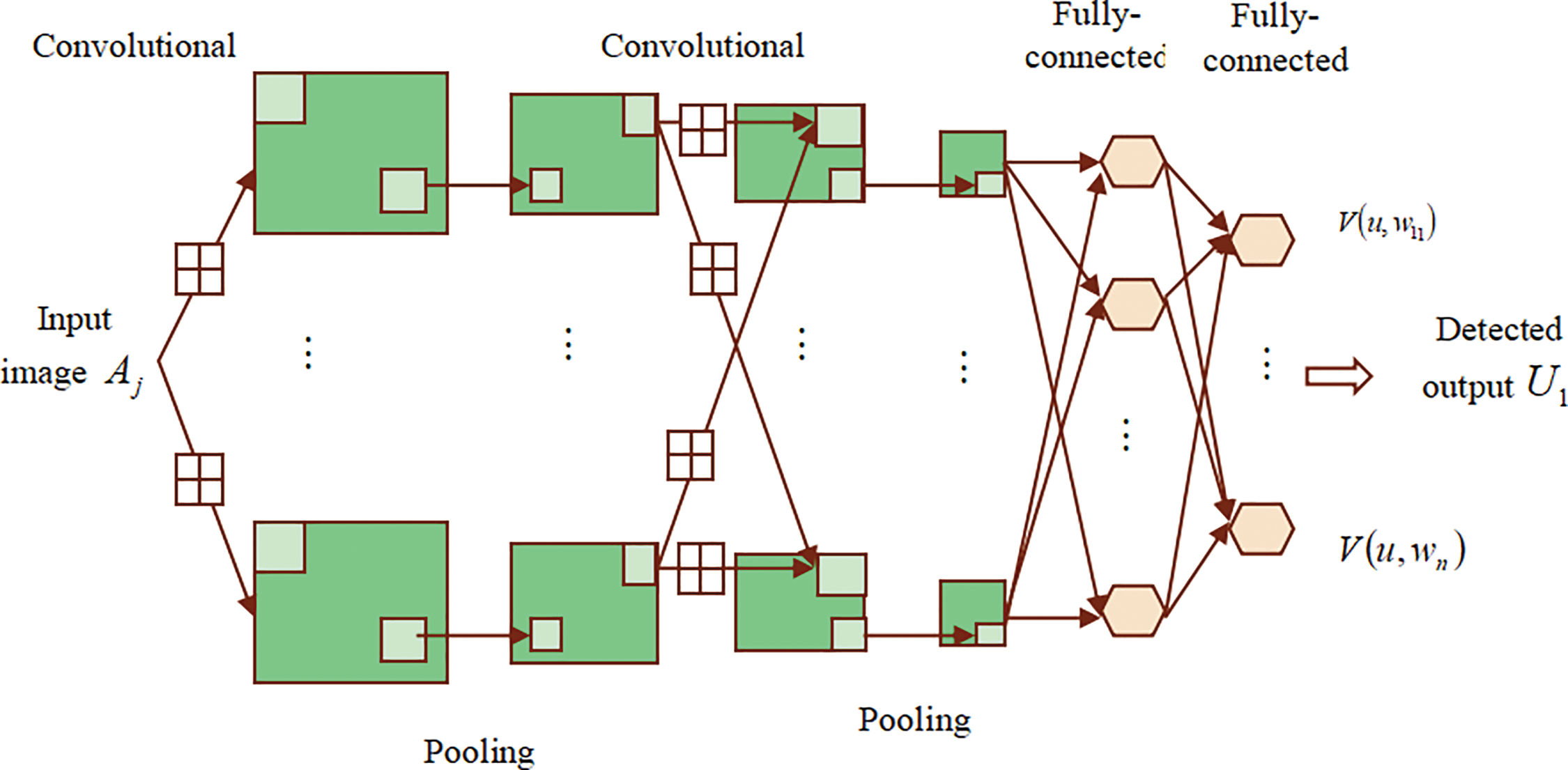
Figure 4: Architectural view of DQN
The Jaccard layer operates on the output of the DQN model
where,
Here,
The Jaccard layer output
At time
Likewise, the output at time instance
where,
Similarly, at the time
Further, the output at the time
Applying the corresponding values of the outputs of the JFDQN layer in Eq. (39),
where,
Here, the JDQN is applied with the features obtained from the HS-MS, HS-SAR, and HS-SAR-DSM images and correspondingly, the JDQN produces three outputs
The three outputs
Architecture of DMN:
The DMN [40] encompasses numerous maxout layers that produce learnable hidden activations and these layers are linked consecutively. Maxout adopts a maximal operation on the adaptable linear processes and is a general form of Rectified Linear Unit (ReLU). The JDQN outputs
Here,
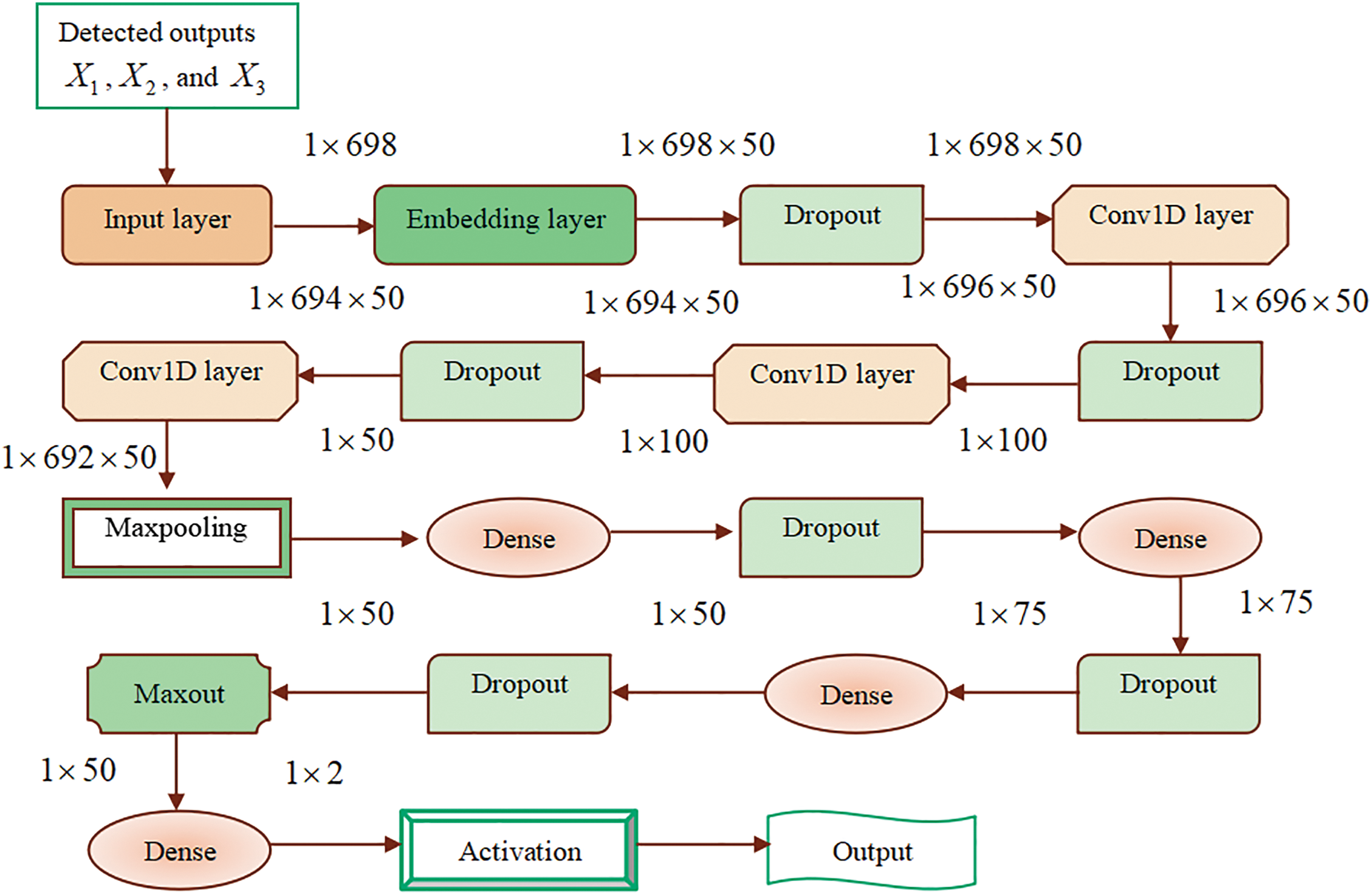
Figure 5: Architecture of DMN
In this section, the evaluation of the JDQN is conducted using data from the Multimodal Remote Sensing Benchmark Datasets for Land Cover Classification [44] with respect to different parameters to demonstrate the superiority of the method.
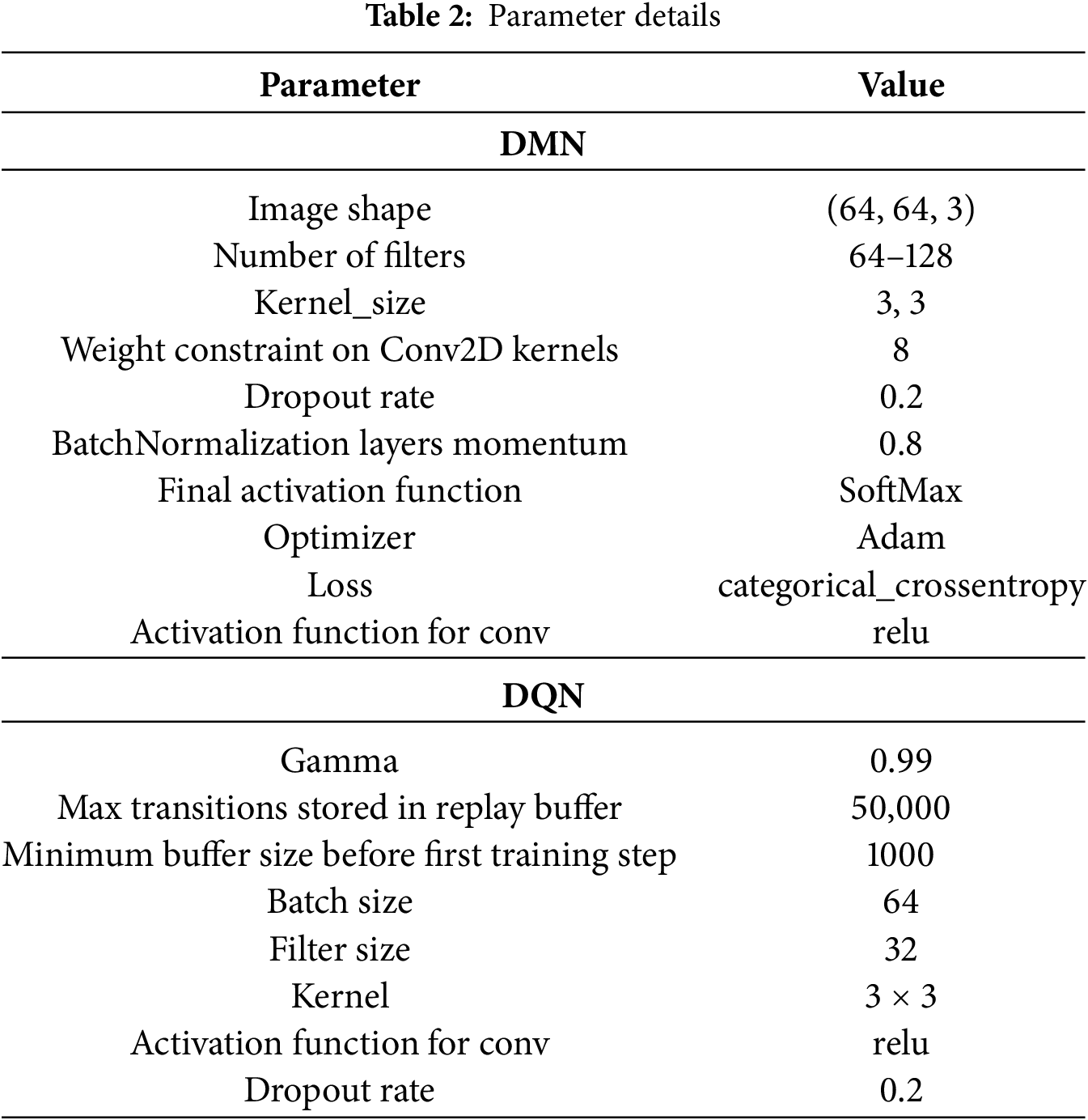
This work proposes a Meyer wavelet transform and Jaccard Deep Q-Net (JDQN)-enabled Deep Maxout Network (DMN) for classifying small objects using multi-modal images, including HS-MS, HS-SAR, and HS-SAR-DSM. The process begins with noise removal using a Kalman filter, followed by image transformation using the Meyer wavelet. The transformed images are segmented using deep joint segmentation and features are extracted using methods like ORB, LVP, and statistical metrics. The extracted features are classified using the newly developed JDQN, which integrates Jaccard similarity and Deep Q-Net. The same workflow is applied to all input image types, and the outputs are processed through the DMN for final classification. The model is implemented in Python, evaluated using performance metrics like PSNR and MSR, and compared with existing methods to highlight its effectiveness. The parameter details of the proposed method are illustrated in Table 2.
The multimodal images used in this study are taken from the Multimodal Remote Sensing Benchmark Datasets for Land Cover Classification [44]. The dataset encompasses three multimodal RS datasets, such as HS-SAR-DSM Augsburg, HS-SAR Berlin, and HS-MS Houston 2013. The HS-SAR Berlin dataset comprises the simulated EnMAP data created using the HyMap HS data, explicitly characterizing the rural and urban areas in Berlin urban. The HS-SAR-DSM Augsburg dataset includes data acquired from three distinct sources, such as the DSM image, a dual-Pol PolSAR image, and spaceborne HS image. Here, the POLSAR image is acquired using the Sentinenel-1 and the DSM and HS images are collected using the DAS-EOC over the Augsburg city in Germany. Likewise, the HS-MS Houston2013 is a homogeneous dataset containing HS and MS data acquired from the campus region in the University of Houston, Texas. The dataset consists of images with 1723 × 476 size and includes 244 slices in total.
The image outputs obtained during the implementation of the JDQN are illustrated in Fig. 6. Specifically, Fig. 6a represents the input image, Fig. 6b shows the filtered image, Fig. 6c displays the image after applying the Meyer Wavelet Transform (MWT), Fig. 6d portrays the segmented image corresponding to the DSM modality and the ground truth image is included in Fig. 6e.
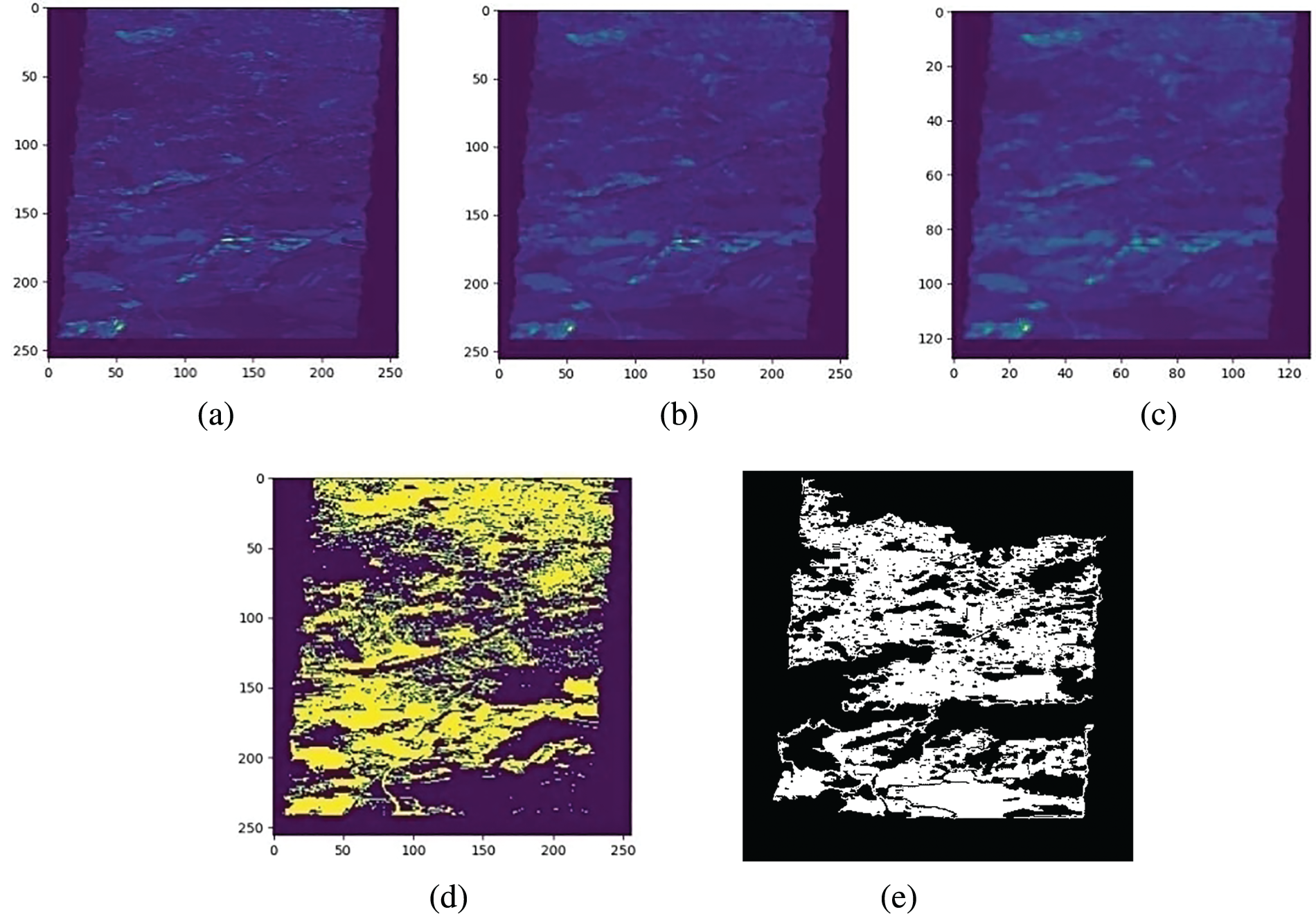
Figure 6: Image results of JDQN for DSM images a) input, b) filtered, c) MWT-applied, d) segmented images, and e) ground truth image
The JDQN proposed in this research is analysed based on measures, like accuracy, precision, MSE and RMSE.
i) Accuracy: It is used to measure the effectiveness of the JDQN in identifying the small objects correctly and expressed in Eq. (45),
wherein,
ii) Precision: This factor is employed for determining the ability of the JDQN in producing the same results at various instances, and is expressed in Eq. (46),
iii) MSE: It is used to find the average squared variation of the results produced by JDQN with respect to the expected results, and is expressed in Eq. (47),
Here,
iv) RMSE: The square root of the MSE yields the RMSE value and is formulated as Eq. (48),
Due to high variation in the values measured for MSE, and RMSE, in this work normalized values of these parameters are used. Specifically, Min-Max normalization was applied to scale the raw MSE and RMSE values between 0 and 1. The normalization formula is given as follows:
Here, the original MSE or RMSE is represented as
The JDQN is scrutinized for its performance with respect to training data at various epochs, and it is illustrated in Fig. 7.
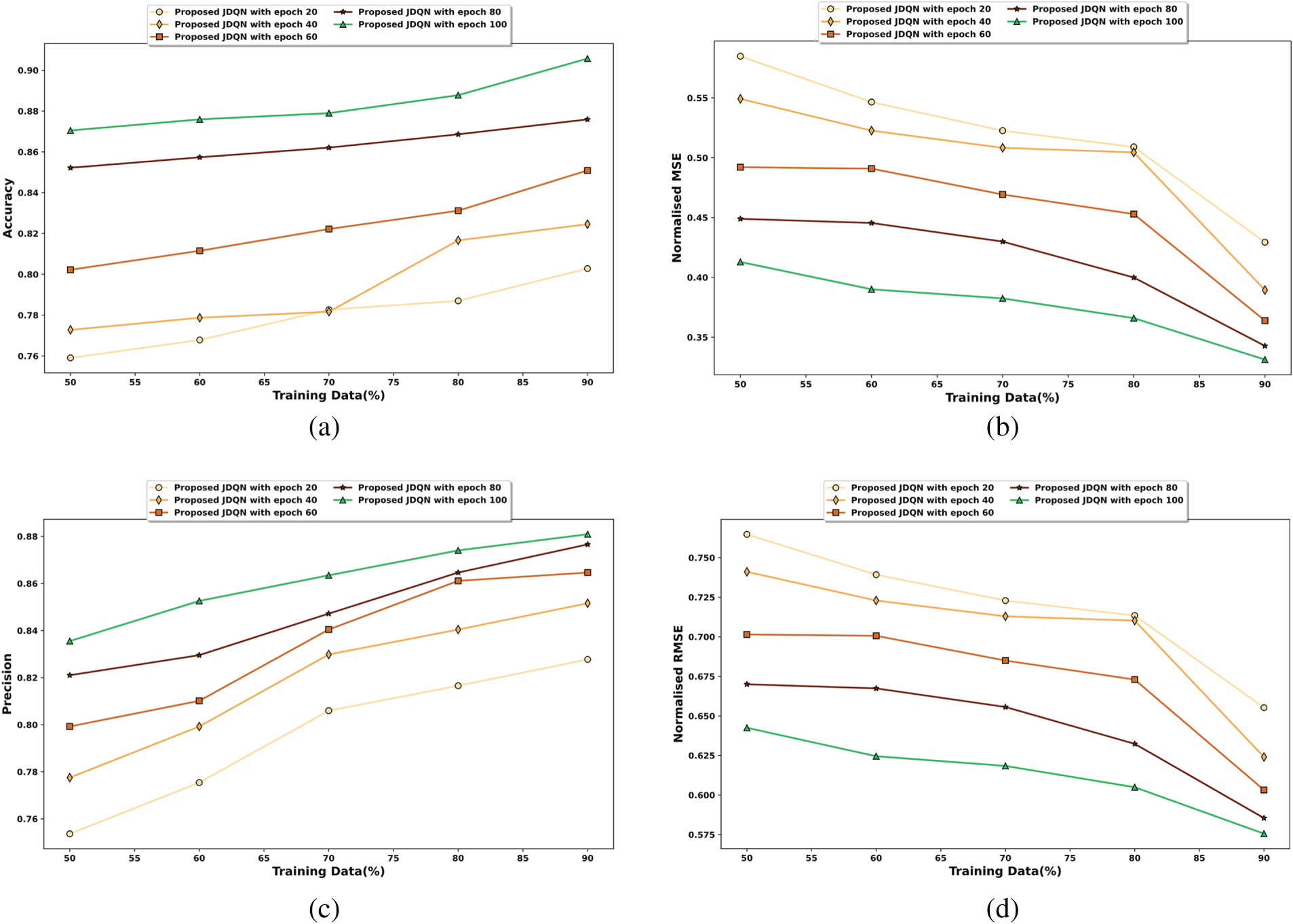
Figure 7: Performance evaluation of the JDQN in terms of a) accuracy, b) normalized MSE, c) precision, and d) normalized RMSE
The analysis of the JDQN concerning accuracy is shown in Fig. 7a. The JDQN recorded accuracy values of 0.783, 0.782, 0.822, 0.862, and 0.879, for 20, 40, 60, 80, and 100 epochs, respectively, with 70% training data. Fig. 7b demonstrates the assessment of the JDQN in terms of normalized MSE. The normalized values of MSE measured by the JDQN for 70% training data are 0.509, 0.508, 0.469, 0.430, and 0.366, for 20, 40, 60, 80, and 100 epochs, respectively. In Fig. 7c, the appraisal of the JDQN based on precision is accomplished. The JDQN attained precision values of 0.806, 0.830, 0.840, 0.847, and 0.863 corresponding to 20, 40, 60, 80, and 100 epochs, respectively, with 70% training data. Further, in Fig. 7d, the examination of the JDQN based on normalized RMSE is illustrated with 70% training data, the JDQN recorded normalized RMSE values of 0.713, 0.713, 0.685, 0.656, and 0.605, for 20, 40, 60, 80, and 100 epochs, respectively.
The JDQN is compared to the prevailing techniques of small object detection, such as YOLOrs [12], EFPN [26], Faster-RCNN [21], GHOST [5], DLSODC-GWM [9], and CAT-Det [29] to examine its efficiency.
The investigation of the JDQN is accomplished by taking into consideration the values recorded for various parameters with diverse training data and K-Fold.
Fig. 8 examines the small objection detection framework proposed in this work with varying percentages of training data. The assessment of the JDQN in terms of accuracy is depicted in Fig. 8a. The different small object detection approaches, such as YOLOrs, EFPN, Faster-RCNN, GHOST, DLSODC-GWM, CAT-Det, and JDQN are observed to measure the accuracy of 0.798, 0.849, 0.864, 0.879, 0.831, 0.856, and 0.884, correspondingly, for 80% training data. This demonstrates that the JDQN achieved a better accuracy value of 9.73%, 3.96%, 2.56%, 0.56%, 6.00%, and 3.17% than the existing techniques. Fig. 8b illustrates the evaluation of the JDQN in terms of normalized MSE. For 60% of training data, the normalized MSE recorded by the JDQN is 0.393, while the existing techniques produced normalized MSE values of 0.533 for YOLOrs, 0.526 for EFPN, 0.463 for Faster-RCNN, 0.438 for GHOST, 0.535 for DLSODC-GWM, 0.495 for CAT-Det. Fig. 8c presents the analysis of the JDQN based on precision. The precision value recorded by the object detection approaches, like YOLOrs is 0.839, EFPN is 0.862, Faster-RCNN is 0.877, GHOST is 0.892, DLSODC-GWM is 0.859, CAT-Det is 0.876, and JDQN is 0.902 with 80% training data. Thus, the JDQN demonstrated an improved performance of 7.05%, 4.47%, 2.76%, 1.17%, 4.77%, and 2.88% than the existing methods. Likewise, the investigation of the JDQN in view of the normalized RMSE is displayed in Fig. 8d. The normalized value of RMSE attained by the JDQN is 0.627, which is lower than the normalized RMSE value of 0.730, 0.725, 0.680, 0.662, 0.735, and 0.706 measured by the YOLOrs, EFPN, Faster-RCNN, GHOST, DLSODC-GWM, and CAT-Det, respectively, with 60% of training data. Fig. 8e depicts the analysis of the inference time. The inference time required by the object detection approaches, like YOLOrs is 0.137 ms, EFPN is 0.114 ms, Faster-RCNN is 0.105 ms, GHOST is 0.103 ms, DLSODC-GWM is 0.102 ms, CAT-Det is 0.095 ms, and JDQN is 0.078 ms with 90% of training data.

Figure 8: Comparative valuation of the JDQN considering a) accuracy, b) normalized MSE, c) precision, d) normalized RMSE, and e) inference time with varying training data
4.7.2 Using K-Fold Cross Validation
Fig. 9 provides an evaluation of the JDQN model based on four performance metrics, considering the K-Fold. In Fig. 9a, the performance of JDQN in terms of accuracy is illustrated. The competing methods, including YOLOrs, EFPN, Faster-RCNN, GHOST, DLSODC-GWM, and CAT-Det, achieved accuracy levels of 0.821, 0.859, 0.874, 0.889, 0.848, and 0.869, respectively. The JDQN achieved a higher accuracy of 0.899 with a K-Fold of 8, which is 8.69%, 4.49%, 2.77%, 1.17%, 5.67%, and 3.34% improved than the existing methods. Fig. 9b presents the normalized MSE analysis of JDQN. At a K-Fold of 6, JDQN demonstrated a lower normalized MSE of 0.382, while the values recorded by YOLOrs, EFPN, Faster-RCNN, GHOST, DLSODC-GWM, and CAT-Det, were 0.543, 0.476, 0.409, 0.384, 0.529, and 0.493, respectively, showcasing JDQN’s enhanced performance in minimizing MSE. The precision of JDQN is analyzed in Fig. 9c. For a K-Fold of 8, the precision values achieved by YOLOrs, EFPN, Faster-RCNN, GHOST, DLSODC-GWM, CAT-Det, and JDQN were 0.830, 0.861, 0.876, 0.891, 0.854, 0.873, and 0.896, respectively. This indicates that JDQN outperformed the other methods, with improvements of 7.36%, 3.93%, 2.21%, 0.61%, 4.69%, and 2.57%. Fig. 9d illustrates the normalized RMSE performance of JDQN. At a K-Fold of 6, the normalized RMSE values recorded were 0.737 for YOLOrs, 0.690 for EFPN, 0.640 for Faster-RCNN, 0.620 for GHOST, 0.731 for DLSODC-GWM, 0.705 for CAT-Det, and a superior 0.618 for JDQN, highlighting its effectiveness and superiority across all metrics.
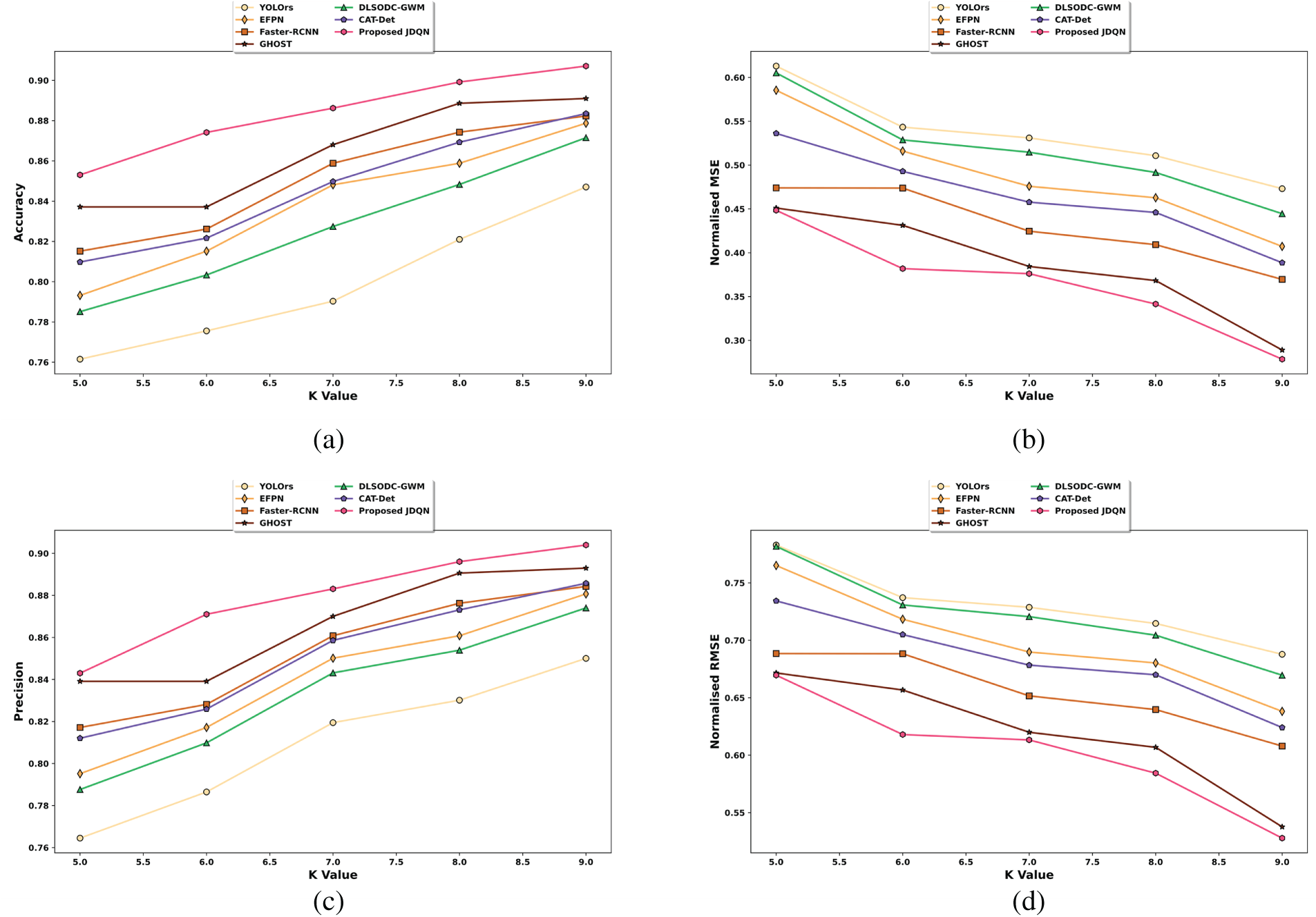
Figure 9: Comparative analysis of the JDQN concerning a) accuracy, b) normalized MSE, c) precision, and d) normalized RMSE based on K-Fold
Fig. 10 illustrates the results of an ablation study conducted to evaluate the contribution of each component within the proposed JDQN framework, using accuracy as the performance metric. This analysis is performed by systematically removing individual components and observing the resulting changes in accuracy across different proportions of training data. When 90% of the training data is considered, the accuracy obtained by the JDQN without AKF, JDQN without MWT, JDQN without Deepjoint segmentation, JDQN without feature extraction, DQN, and proposed JDQN is 0.812, 0.851, 0.855, 0.863, 0.884, and 0.902. These findings underscore the significance of each component in enhancing the overall accuracy of the proposed model.
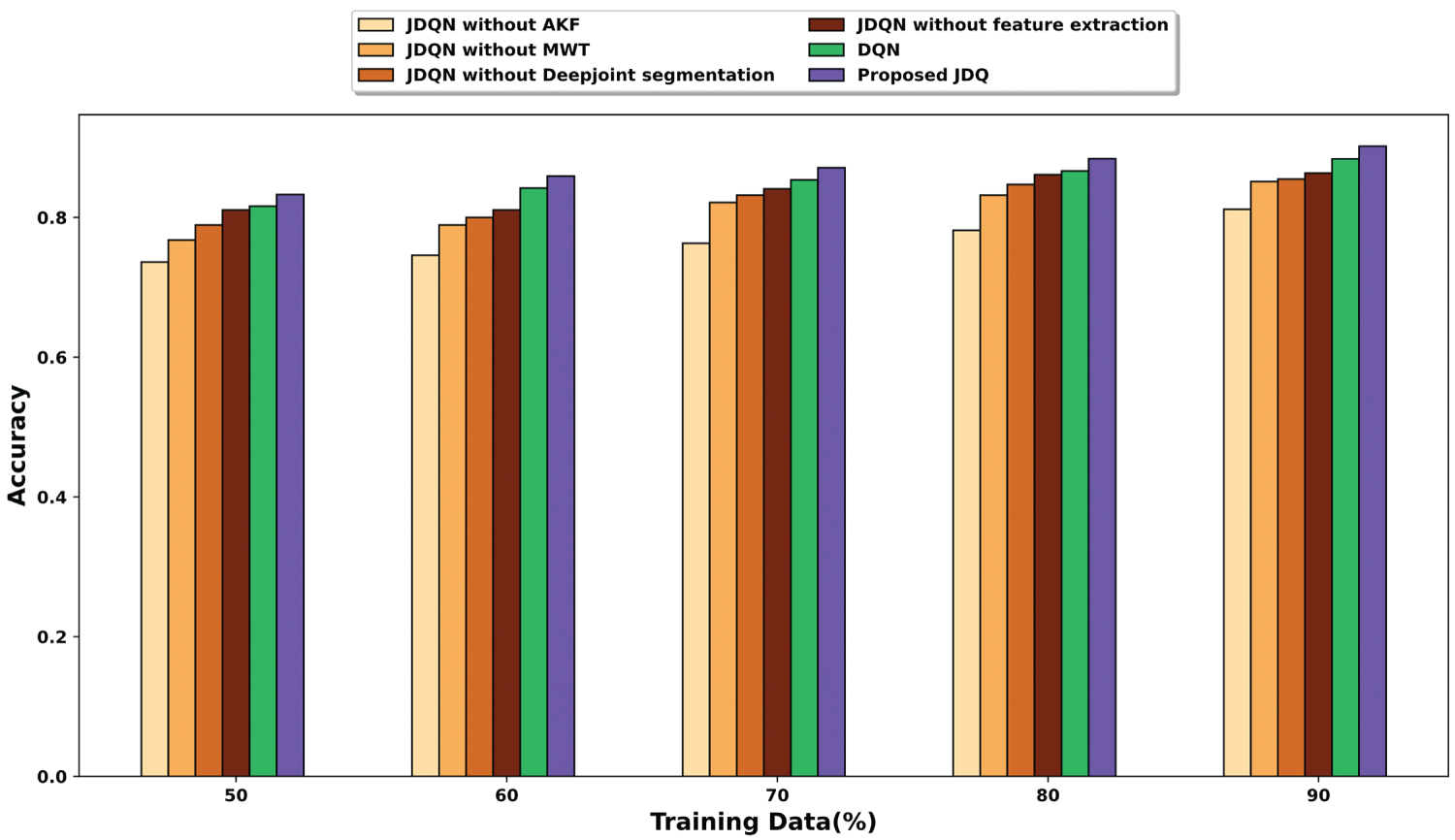
Figure 10: Ablation study
Fig. 11 presents a comparative analysis of different fusion strategies. In this research, DMN is used for fusion, and the performance of the DMN is compared with other fusion methods, such as averaging and majority voting. As illustrated in the figure, the JDQN with DMN consistently achieves higher accuracy across all training data percentages. When 90% of the training data is used, the accuracy obtained by JDQN with averaging, JDQN with majority voting, and JDQN with DMN is 0.827, 0.868, and 0.890, respectively. These results indicate that the DMN-based fusion significantly improves the ability to integrate multimodal information, leading to more accurate small object detection.
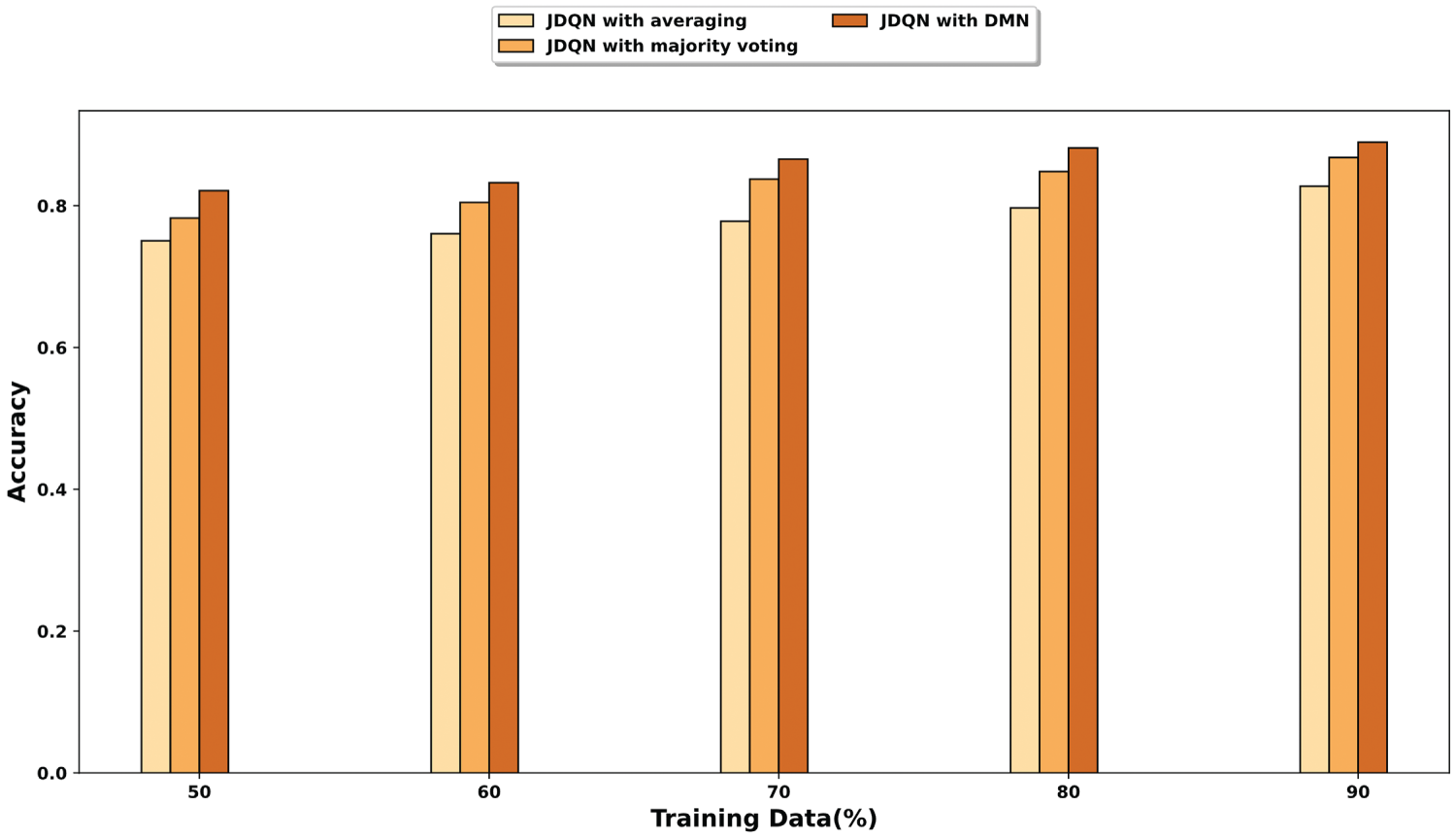
Figure 11: Analysis based on fusion
Table 3 presents the results of the Analysis of Variance (ANOVA) test conducted to evaluate the statistical significance of differences in performance among the various methods analyzed. The factor C, representing the comparison groups, shows a sum of squares of 0.045678 with 4 degrees of freedom, resulting in an F-value of 21.023822. The associated p-value is 2.1258E−12, which is significantly lower than the conventional significance threshold 0.05. These results indicate that there is a statistically significant difference among the compared methods. Additionally, the 95% confidence interval for accuracy, ranging from 0.8266 to 0.9123, reinforces the robustness and reliability of the proposed model.

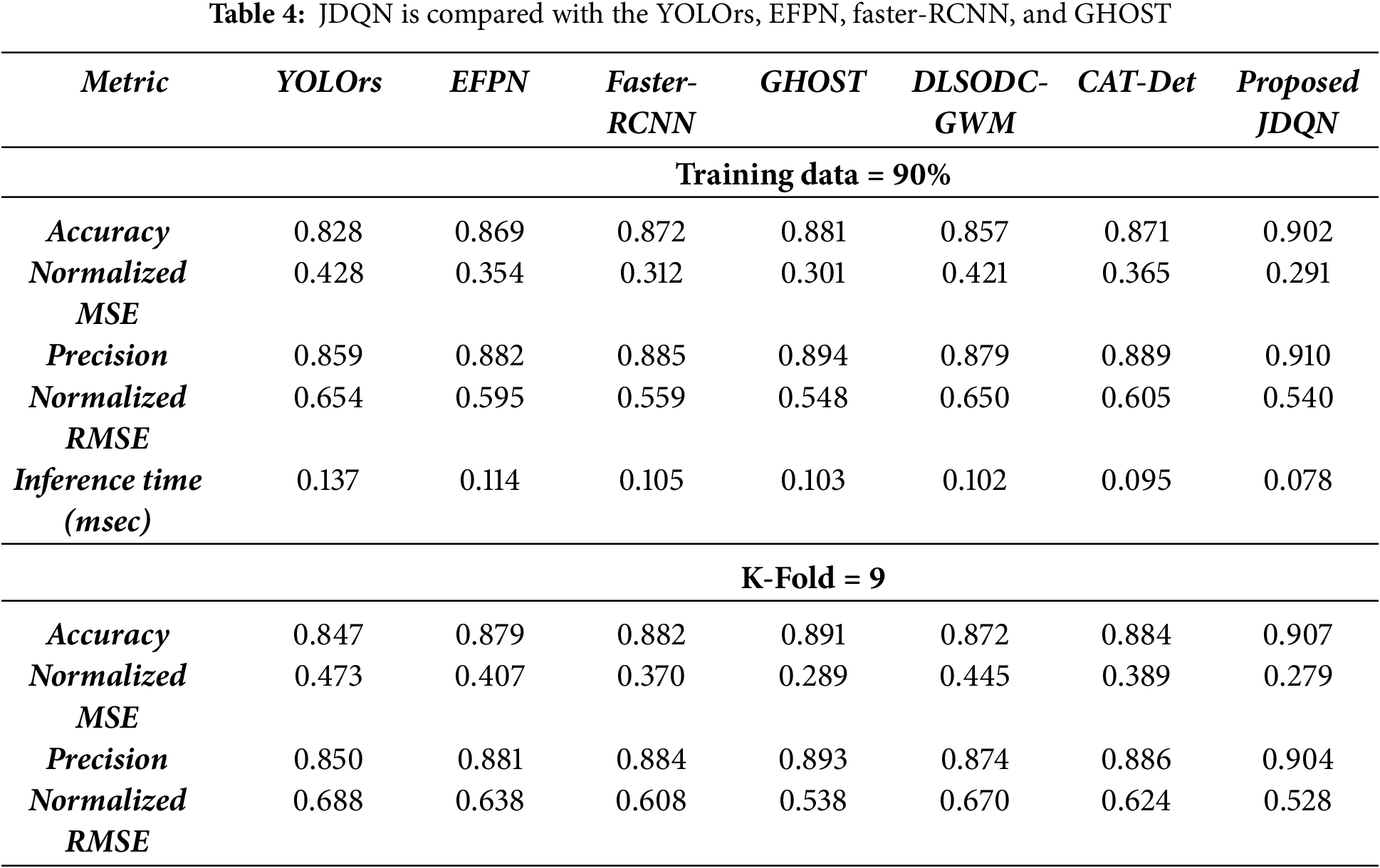
In Table 4, the comparison of JDQN with YOLOrs, EFPN, Faster-RCNN, and GHOST is presented in terms of accuracy, normalized MSE, precision, and normalized RMSE. The values in Table 4 correspond to the scenario when 90% of the training data and a K-Fold of 9 are considered. It can be noticed from the table that the JDQN achieved a higher accuracy of 0.907, whereas the accuracy measured by YOLOrs is 0.847, EFPN is 0.879, Faster-RCNN is 0.882, GHOST is 0.891, DLSODC-GWM is 0.872, and CAT-Det is 0.884. The high accuracy is attributed to the minimization of false positives due to the capability of JDQN in learning high-level representations in the input image. Likewise, the JDQN achieved a high precision of 0.904 as a result of the application of Deepjoint segmentation for extricating the small objects from the background. The approaches, such as YOLOrs, EFPN, Faster-RCNN, GHOST, DLSODC-GWM, and CAT-Det, however, recorded a low precision of 0.850, 0.881, 0.884, 0.893, 0.874, and 0.886, respectively. Similarly, the JDQN recorded a lower normalized MSE value of 0.279 in comparison to the normalized MSE measured by YOLOrs is 0.473, EFPN is 0.407, Faster-RCNN is 0.370, GHOST is 0.289, DLSODC-GWM is 0.445, and CAT-Det is 0.389. The application of ORB and LVP features enabled the extraction of optimal features, which contributed to minimal error while detecting small objects. The low value of normalized MSE of the JDQN also led to a low normalized RMSE value of 0.528, whereas the normalized RMSE attained by YOLOrs, EFPN, Faster-RCNN, GHOST, DLSODC-GWM, and CAT-Det is 0.688, 0.638, 0.608, 0.538, 0.670, and 0.624, respectively. The proposed method achieved an inference time of 0.078 ms, which is lower than that of the compared methods when considering training data is 90%.
The superior performance of the proposed method stems from its effective integration of multimodal image data, leveraging complementary information to address challenges such as low resolution, occlusion, and background interference. The JDQN combines the Jaccard similarity measure with DQN to enhance object localization and adapt to varying conditions, while regression modeling further refines predictions. Additionally, the DMN efficiently fuses outputs from different modalities, ensuring robust final detection. The high performance of the proposed method underscores its reliability in detecting small objects.
The proposed JDQN-based small object detection framework holds significant potential for practical deployment in real-world scenarios. In military surveillance, the integration of hyperspectral and SAR data enables the accurate identification of hidden objects under challenging environmental conditions. Similarly, in emergency rescue operations, rapid and reliable detection of small objects in cluttered environments can greatly enhance response efficiency and safety. Beyond these domains, the JDQN framework is adaptable to urban monitoring, border surveillance, disaster management, and environmental monitoring, where multimodal data sources are often available.
In this research, a deep learning (DL) network named JDQN is proposed for detecting small objects from multimodal remote sensing (RS) images. The JDQN is developed by integrating the Jaccard similarity measure into the Deep Q-Network (DQN) framework, leveraging regression analysis. The detection process involves a sequence of steps, including pre-processing, image transformation, segmentation, feature extraction, detection, and fusion. Multimodal input images, such as HS-SAR, HS-MS, or HS-SAR-DSM, are initially denoised using the Adaptive Kalman Filter (AKF) and subsequently transformed into the frequency domain using the Meyer Wavelet Transform (MWT). Following this, small objects are segmented from the background using Deepjoint segmentation, and various features are extracted. These features are then fed into the JDQN to detect small objects, with the results from each modality fused using the DMN to produce the final output. The proposed JDQN demonstrates superior performance, achieving an accuracy of 0.907, a normalized MSE of 0.279, a precision of 0.904, and a normalized RMSE of 0.528. Future work will aim to further enhance detection accuracy through the integration of advanced image augmentation techniques and additional features, increasing the approach’s applicability to real-time scenarios. The feasibility of deploying JDQN in real-time systems, such as drones for surveillance or emergency response, as well as the extension of the method to additional imaging modalities, such as thermal or ultrasound imaging, will be explored in future work.
Acknowledgement: The authors would like to thank all individuals and institutions that contributed to this research.
Funding Statement: Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2025R137), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia. The authors extend their appreciation to Universiti Teknikal Malaysia Melaka (UTeM) and to the Ministry of Higher Education of Malaysia (MOHE) for their support in this research. The authors express their gratitude to Quanzhou University of Information Engineering for its support in this research.
Author Contributions: Mian Muhammad Kamal: Conceptualization, Methodology, Writing—original draft, Investigation. Syed Zain Ul Abideen: Writing—original draft, Investigation. M. A. Al-Khasawneh: Software, Writing—review & editing. Alaa M. Momani: Data curation, Investigation. Hala Mostafa; Funding acquisition, Supervision, Project administration. Mohammed Salem Atoum: Project administration, Supervision. Saeed Ullah: Validation, Software. Jamil Abedalrahim Jamil Alsayaydeh: Supervision, Funding acquisition, Project administration. Mohd Faizal Bin Yusof: Conceptualization, Writing—review & editing. Suhaila Binti Mohd Najib: Data curation, Writing—review & editing. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the corresponding authors upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Meyer A, Brand F, Kaup A. Learned wavelet video coding using motion compensated temporal filtering. IEEE Access. 2023;11:113390–401. doi:10.1109/ACCESS.2023.332387. [Google Scholar] [CrossRef]
2. Ding J, Xue N, Long Y, Xia GS, Lu Q. Learning RoI transformer for oriented object detection in aerial images. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2019 Jun 15–20; Long Beach, CA, USA. p. 2844–53. doi:10.1109/CVPR.2019.00296. [Google Scholar] [CrossRef]
3. Bhanu B, Lin Y. Object detection in multi-modal images using genetic programming. Appl Soft Comput. 2004;4(2):175–201. doi:10.1016/j.asoc.2004.01.004. [Google Scholar] [CrossRef]
4. Wang Z, Zang T, Fu Z, Yang H, Du W. RLPGB-net: reinforcement learning of feature fusion and global context boundary attention for infrared dim small target detection. IEEE Trans Geosci Remote Sens. 2023;61:5003615. doi:10.1109/TGRS.2023.3304755. [Google Scholar] [CrossRef]
5. Zhang J, Lei J, Xie W, Li Y, Yang G, Jia X. Guided hybrid quantization for object detection in remote sensing imagery via one-to-one self-teaching. IEEE Trans Geosci Remote Sens. 2023;61:5614815. doi:10.1109/TGRS.2023.3293147. [Google Scholar] [CrossRef]
6. Zhang C, Achuthan A, Himel GMS. State-of-the-art and challenges in pancreatic CT segmentation: a systematic review of U-Net and its variants. IEEE Access. 2024;12(2):78726–42. doi:10.1109/access.2024.3392595. [Google Scholar] [CrossRef]
7. Wang H, Zhou L, Wang L. Miss detection vs. false alarm: adversarial learning for small object segmentation in infrared images. In: 2019 IEEE/CVF International Conference on Computer Vision (ICCV); 2019 Oct 27–Nov 2; Seoul, Republic of Korea. p. 8508–17. doi:10.1109/iccv.2019.00860. [Google Scholar] [CrossRef]
8. Chandra Joshi R, Kumar Sharma A, Kishore Dutta M. VisionDeep-AI: deep learning-based retinal blood vessels segmentation and multi-class classification framework for eye diagnosis. Biomed Signal Process Control. 2024;94:106273. doi:10.1016/j.bspc.2024.106273. [Google Scholar] [CrossRef]
9. Alsubaei FS, Al-Wesabi FN, Hilal AM. Deep learning-based small object detection and classification model for garbage waste management in smart cities and IoT environment. Appl Sci. 2022;12(5):2281. doi:10.3390/app12052281. [Google Scholar] [CrossRef]
10. Tian Y, Wang K, Wang Y, Tian Y, Wang Z, Wang FY. Adaptive and azimuth-aware fusion network of multimodal local features for 3D object detection. Neurocomputing. 2020;411(3):32–44. doi:10.1016/j.neucom.2020.05.086. [Google Scholar] [CrossRef]
11. Taye MM. Understanding of machine learning with deep learning: architectures, workflow, applications and future directions. Computers. 2023;12(5):91. doi:10.3390/computers12050091. [Google Scholar] [CrossRef]
12. Sharma M, Dhanaraj M, Karnam S, Chachlakis DG, Ptucha R, Markopoulos PP, et al. YOLOrs: object detection in multimodal remote sensing imagery. IEEE J Sel Top Appl Earth Obs Remote Sens. 2020;14:1497–508. doi:10.1109/jstars.2020.3041316. [Google Scholar] [CrossRef]
13. Liu L, Ouyang W, Wang X, Fieguth P, Chen J, Liu X, et al. Deep learning for generic object detection: a survey. Int J Comput Vis. 2020;128(2):261–318. doi:10.1007/s11263-019-01247-4. [Google Scholar] [CrossRef]
14. Zhao ZQ, Zheng P, Xu ST, Wu X. Object detection with deep learning: a review. IEEE Trans Neural Netw Learn Syst. 2019;30(11):3212–32. doi:10.1109/TNNLS.2018.2876865. [Google Scholar] [PubMed] [CrossRef]
15. Han J, Zhang D, Cheng G, Liu N, Xu D. Advanced deep-learning techniques for salient and category-specific object detection: a survey. IEEE Signal Process Mag. 2018;35(1):84–100. doi:10.1109/MSP.2017.2749125. [Google Scholar] [CrossRef]
16. Park CW, Seo Y, Sun TJ, Lee GW, Huh EN. Small object detection technology using multi-modal data based on deep learning. In: 2023 International Conference on Information Networking (ICOIN); 2023 Jan 11–14; Bangkok, Thailand. p. 420–2. doi:10.1109/ICOIN56518.2023.10049014. [Google Scholar] [CrossRef]
17. Yin Z, Wu Z, Zhang J. A deep network based on wavelet transform for image compressed sensing. Circuits Syst Signal Process. 2022;41(11):6031–50. doi:10.1007/s00034-022-02058-8. [Google Scholar] [CrossRef]
18. Al-Battal AF, Gong Y, Xu L, Morton T, Du C, Bu Y, et al. A CNN segmentation-based approach to object detection and tracking in ultrasound scans with application to the vagus nerve detection. In: 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC); 2021 Nov 1–5; Mexico. p. 3322–7. doi:10.1109/EMBC46164.2021.9630522. [Google Scholar] [PubMed] [CrossRef]
19. Sipai U, Jadeja R, Kothari N, Trivedi T, Mahadeva R, Patole SP. Performance evaluation of discrete wavelet transform and machine learning based techniques for classifying power quality disturbances. IEEE Access. 2024;12:95472–86. doi:10.1109/access.2024.3426039. [Google Scholar] [CrossRef]
20. Li X, Liu J, Tang Z, Han B, Wu Z. MEDMCN: a novel multi-modal EfficientDet with multi-scale CapsNet for object detection. J Supercomput. 2024;80(9):12863–90. doi:10.1007/s11227-024-05932-1. [Google Scholar] [CrossRef]
21. Cao C, Wang B, Zhang W, Zeng X, Yan X, Feng Z, et al. An improved faster R-CNN for small object detection. IEEE Access. 2019;7:106838–46. doi:10.1109/access.2019.2932731. [Google Scholar] [CrossRef]
22. Condat R, Rogozan A, Bensrhair A. GFD-retina: gated fusion double RetinaNet for multimodal 2D road object detection. In: 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC); 2020 Sep 20–23; Rhodes, Greece. p. 1–6. doi:10.1109/itsc45102.2020.9294447. [Google Scholar] [CrossRef]
23. Chen D, Zhao H, Li Y, Zhang Z, Zhang K. PMF-YOLOv8: enhanced ship detection model in remote sensing images. Inf Technol Control. 2024;53(4):1204–20. doi:10.5755/j01.itc.53.4.37003. [Google Scholar] [CrossRef]
24. Pan W, Shi H, Zhao Z, Zhu J, He X, Pan Z, et al. Wnet: audio-guided video object segmentation via wavelet-based cross-modal denoising networks. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2022 Jun 18–24; New Orleans, LA, USA. p. 1310–21. doi:10.1109/CVPR52688.2022.00138. [Google Scholar] [CrossRef]
25. Punn NS, Agarwal S. Modality specific U-Net variants for biomedical image segmentation: a survey. Artif Intell Rev. 2022;55(7):5845–89. doi:10.1007/s10462-022-10152-1. [Google Scholar] [PubMed] [CrossRef]
26. Deng C, Wang M, Liu L, Liu Y, Jiang Y. Extended feature pyramid network for small object detection. IEEE Trans Multimed. 2021;24:1968–79. doi:10.1109/TMM.2021.3074273. [Google Scholar] [CrossRef]
27. Zhang J, Lei J, Xie W, Fang Z, Li Y, Du Q. SuperYOLO: super resolution assisted object detection in multimodal remote sensing imagery. IEEE Trans Geosci Remote Sens. 2023;61:5605415. doi:10.1109/TGRS.2023.3258666. [Google Scholar] [CrossRef]
28. Saeed F, Ahmed MJ, Gul MJ, Hong KJ, Paul A, Kavitha MS. A robust approach for industrial small-object detection using an improved faster regional convolutional neural network. Sci Rep. 2021;11(1):23390. doi:10.1038/s41598-021-02805-y. [Google Scholar] [PubMed] [CrossRef]
29. Zhang Y, Chen J, Huang D. CAT-det: contrastively augmented transformer for multimodal 3D object detection. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2022 Jun 18–24; New Orleans, LA, USA. p. 898–907. doi:10.1109/CVPR52688.2022.00098. [Google Scholar] [CrossRef]
30. Nan G, Zhao Y, Fu L, Ye Q. Object detection by channel and spatial exchange for multimodal remote sensing imagery. IEEE J Sel Top Appl Earth Obs Remote Sens. 2024;17:8581–93. doi:10.1109/jstars.2024.3388013. [Google Scholar] [CrossRef]
31. Jiang C, Ren H, Yang H, Huo H, Zhu P, Yao Z, et al. M2FNet: multi-modal fusion network for object detection from visible and thermal infrared images. Int J Appl Earth Obs Geoinf. 2024;130:103918. doi:10.1016/j.jag.2024.103918. [Google Scholar] [CrossRef]
32. Mahjourian N, Nguyen V. Multimodal object detection using depth and image data for manufacturing parts. arXiv: 2411.09062. 2024. doi:10.48550/arXiv.2411.09062. [Google Scholar] [CrossRef]
33. Yang Y, Gao W. An optimal adaptive Kalman filter. J Geod. 2006;80(4):177–83. doi:10.1007/s00190-006-0041-0. [Google Scholar] [CrossRef]
34. Valenzuela V, Oliveira H. Close expressions for Meyer wavelet and scale function. In: Anais de XXXIII Simpósio Brasileiro de Telecomunicações. Sociedade Brasileira de Telecomunicações; 2015 Dec 1—4; Brazil: Juiz de Fora. doi:10.14209/sbrt.2015.2. [Google Scholar] [CrossRef]
35. Ali S, Li J, Pei Y, Khurram R, Rehman KU, Mahmood T. A comprehensive survey on brain tumor diagnosis using deep learning and emerging hybrid techniques with multi-modal MR image. Arch Comput Meth Eng. 2022;29(7):4871–96. doi:10.1007/s11831-022-09758-z. [Google Scholar] [CrossRef]
36. Gupta S, Kumar M, Garg A. Improved object recognition results using SIFT and ORB feature detector. Multimed Tools Appl. 2019;78(23):34157–71. doi:10.1007/s11042-019-08232-6. [Google Scholar] [CrossRef]
37. Fan KC, Hung TY. A novel local pattern descriptor—local vector pattern in high-order derivative space for face recognition. IEEE Trans Image Process. 2014;23(7):2877–91. doi:10.1109/tip.2014.2321495. [Google Scholar] [PubMed] [CrossRef]
38. Meyer A, Prativadibhayankaram S, Kaup A. Efficient learned wavelet image and video coding. In: 2024 IEEE International Conference on Image Processing (ICIP); 2024 Oct 27–30; Abu Dhabi, United Arab Emirates. p. 1753–9. doi:10.1109/ICIP51287.2024.10647966. [Google Scholar] [CrossRef]
39. Lv P, Wang X, Cheng Y, Duan Z. Stochastic double deep Q-network. IEEE Access. 2019;7:79446–54. doi:10.1109/access.2019.2922706. [Google Scholar] [CrossRef]
40. Sun W, Su F, Wang L. Improving deep neural networks with multi-layer maxout networks and a novel initialization method. Neurocomputing. 2018;278(9):34–40. doi:10.1016/j.neucom.2017.05.103. [Google Scholar] [CrossRef]
41. Lessa V, Marengoni M. Applying artificial neural network for the classification of breast cancer using infrared thermographic images. Cham, Switzerland: Springer International Publishing; 2016. p. 429–38. doi:10.1007/978-3-319-46418-3_38. [Google Scholar] [CrossRef]
42. Yang Q, Chen D, Zhao T, Chen Y. Fractional calculus in image processing: a review. Fract Calc Appl Anal. 2016;19(5):1222–49. doi:10.1515/fca-2016-0063. [Google Scholar] [CrossRef]
43. Sasaki H, Horiuchi T, Kato S. A study on vision-based mobile robot learning by deep Q-network. In: 2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE); 2017 Sep 19–22; Kanazawa, Japan. p. 799–804. [Google Scholar]
44. Hong D, Hu J, Yao J, Chanussot J, Zhu XX. Multimodal remote sensing benchmark datasets for land cover classification with a shared and specific feature learning model. ISPRS J Photogramm Remote Sens. 2021;178(9–10):68–80. doi:10.1016/j.isprsjprs.2021.05.011. [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools