
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Development of a Mathematical Control-Oriented Model for Floating Offshore Wind Turbines
1 Dept. Computer Architecture and Automatic Control, Faculty of Physics, Universidad Complutense de Madrid, Madrid, Spain
2 Institute of Knowledge Technology, Computer Sciences Faculty, Universidad Complutense de Madrid, Madrid, Spain
* Corresponding Author: Segundo Esteban. Email:
Computer Modeling in Engineering & Sciences 2026, 147(1), 20 https://doi.org/10.32604/cmes.2026.077663
Received 15 December 2025; Accepted 02 March 2026; Issue published 27 April 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
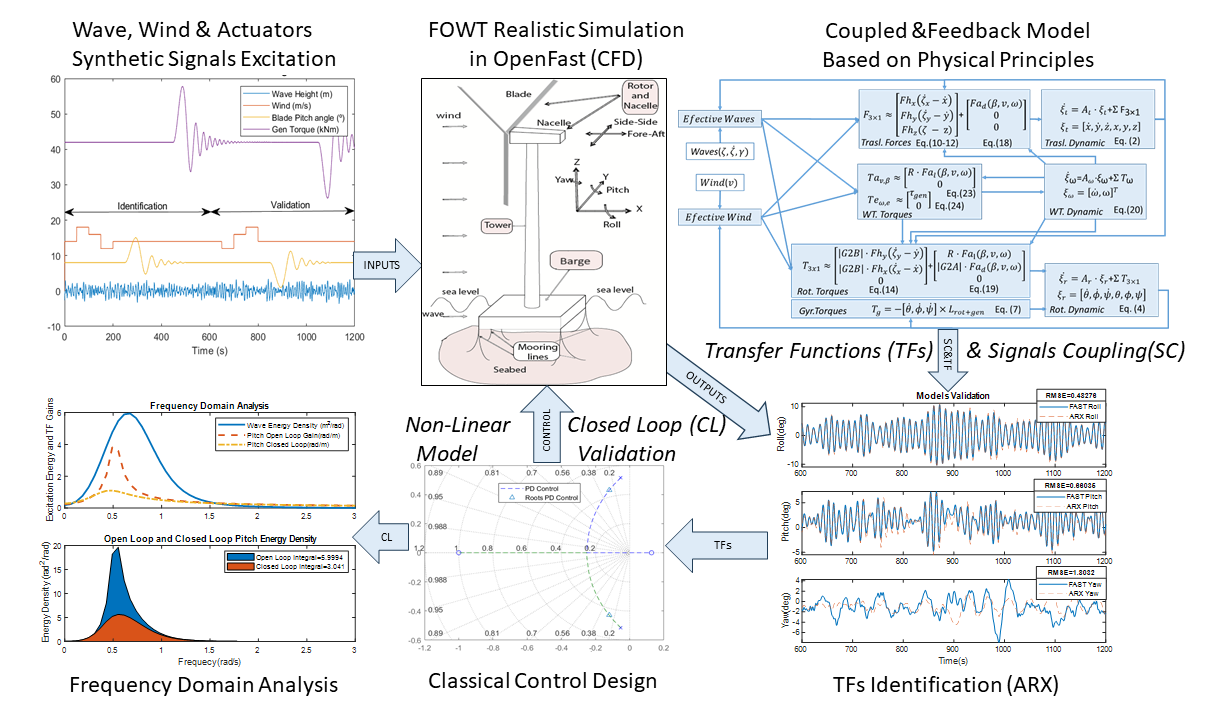
Wind turbines are highly efficient energy converters that exploit locally available renewable resources across many regions. In modern floating offshore wind turbines (FOWTs), strong aerodynamic and hydrodynamic loads give rise to nonlinear and tightly coupled dynamics, which typically require dedicated—and computationally demanding—simulation tools for analysis and control design. This work introduces a simplified, control-oriented mathematical model of a FOWT, derived directly from fundamental force and torque balances and explicitly incorporating the gyroscopic effect, which is often neglected in onshore wind turbines due to its comparatively lower significance. Model parameters are identified for the NREL 5-MW reference turbine using autoregressive models with exogenous input (ARX) techniques. The proposed model is validated against the standard NREL OpenFAST simulation framework. Its utility is further demonstrated by designing a classical control system based on the simplified model and applying it to a high-fidelity nonlinear FOWT simulation, yielding satisfactory performance. The main advantages of the model are: (a) its compact parameter set enables computationally efficient simulations; (b) its feedback structure is based on relative forces, making it applicable under a broader range of disturbances than conventional input–output models; (c) its simplicity facilitates the identification of fundamental behaviors and rapid assessment of dynamic couplings; and (d) its structure is easily modifiable, allowing redesign of components or targeted alteration of the system dynamics through control actions. Overall, the model remains fully explainable, preserving a clear link to the underlying physical principles.Graphic Abstract
Keywords
Wind energy; floating offshore wind turbine; modeling; control; identification; explainability
Cite This Article
APA Style
Esteban, S., Santos, M. (2026). Development of a Mathematical Control-Oriented Model for Floating Offshore Wind Turbines. Computer Modeling in Engineering & Sciences, 147(1), 20. https://doi.org/10.32604/cmes.2026.077663
Vancouver Style
Esteban S, Santos M. Development of a Mathematical Control-Oriented Model for Floating Offshore Wind Turbines. Comput Model Eng Sci. 2026;147(1):20. https://doi.org/10.32604/cmes.2026.077663
IEEE Style
S. Esteban and M. Santos, “Development of a Mathematical Control-Oriented Model for Floating Offshore Wind Turbines,” Comput. Model. Eng. Sci., vol. 147, no. 1, pp. 20, 2026. https://doi.org/10.32604/cmes.2026.077663
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools