
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
SmokerViT: A Transformer-Based Method for Smoker Recognition
1 College of Mathematics and Computer Science, Zhejiang Normal University, Jinhua, 321004, China
2 School of Electronics Engineering, Beijing University of Posts and Telecommunications, Beijing, 100876, China
3 Department of Electrical Engineering and Computer Science, Khalifa University of Science and Technology, Abu Dhabi, 127788, United Arab Emirates
4 Key Laboratory of Intelligent Education of Zhejiang Province, Zhejiang Normal University, Jinhua, 321004, China
* Corresponding Author: Zhonglong Zheng. Email:
Computers, Materials & Continua 2023, 77(1), 403-424. https://doi.org/10.32604/cmc.2023.040251
Received 10 March 2023; Accepted 01 July 2023; Issue published 31 October 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Smoking has an economic and environmental impact on society due to the toxic substances it emits. Convolutional Neural Networks (CNNs) need help describing low-level features and can miss important information. Moreover, accurate smoker detection is vital with minimum false alarms. To answer the issue, the researchers of this paper have turned to a self-attention mechanism inspired by the ViT, which has displayed state-of-the-art performance in the classification task. To effectively enforce the smoking prohibition in non-smoking locations, this work presents a Vision Transformer-inspired model called SmokerViT for detecting smokers. Moreover, this research utilizes a locally curated dataset of 1120 images evenly distributed among the two classes (Smoking and NotSmoking). Further, this research performs augmentations on the smoker detection dataset to have many images with various representations to overcome the dataset size limitation. Unlike convolutional operations used in most existing works, the proposed SmokerViT model employs a self-attention mechanism in the Transformer block, making it suitable for the smoker classification problem. Besides, this work integrates the multi-layer perceptron head block in the SmokerViT model, which contains dense layers with rectified linear activation and linear kernel regularizer with L2 for the recognition task. This work presents an exhaustive analysis to prove the efficiency of the proposed SmokerViT model. The performance of the proposed SmokerViT performance is evaluated and compared with the existing methods, where it achieves an overall classification accuracy of 97.77%, with 98.21% recall and 97.35% precision, outperforming the state-of-the-art deep learning models, including convolutional neural networks (CNNs) and other vision transformer-based models.Keywords
The smoking epidemic is one of the world’s significant public health threats, killing more than 8 million people yearly, including 1.2 million from passive smoking. In 2020 statistics [1], 22.3% of the world’s population smoke, and 80% of those 1.3 billion smokers worldwide are in low- and medium-income countries. According to a report about different causes of death worldwide, smoking is the second most significant risk factor for death [2]. Smoking monitoring and preventive policies are included as actions that should be implemented in the World Health Organization (WHO) framework convention on smoking control [3]. Therefore, detecting smokers in no-smoking areas is essential for effective surveillance.
Traditional surveillance methods for smoker detection are inefficient and affected by various factors, thus limiting the development of intelligent surveillance [4,5]. Researchers have continuously applied different methods to surveillance systems to answer these problems and benefit from artificial intelligence technology [6,7]. Deep learning is the state-of-the-art (SOTA) artificial intelligence method that has become integral to computer vision [8]. Compared to traditional image processing and machine learning methods, deep learning does not require complex image pre-processing. The Deep Neural Network (DNN), which employs deep learning techniques [9], significantly improves object detection efficiency by automatically learning the features from raw data. Convolutional Neural Networks (CNNs), a subset of DNNs, have been widely utilized to classify and cluster images based on similarity and recognize objects in scenes. CNNs have encouraged the exponential rise in deep learning as it enables significant advancements in many exciting applications, including surveillance [10,11], medical diagnosis [12], self-driving cars [13], etc.
Since the first CNN model AlexNet [14], resulted in faster training time efficiency, new CNN models are proposed with improved accuracy with fewer parameters. Early models, such as the Visual Geometry Group (VGG) [15], had many neurons and parameters, which may result in overfitting and involve enormous computational resources. With the application of residual blocks, the training efficiency of CNN models was improved with some widely used SOTA models such as ResNet [16], Inception [17], and DenseNet [18]. All the previously proposed CNN methods employed in different applications showed that accuracy is critical for applying deep learning in computer vision.
CNN models have become a vital tool in computer vision-based surveillance applications. Convolution layers were previously widely used as the fundamental building block; however, current trends of adding attention processes have prompted researchers to rethink this. In addition to assisting CNNs with long-range dependencies, attention may replace convolutions to provide SOTA performance on computer vision tasks [19]. Recently, researchers have examined using self-attention in vision-based tasks because of its potential for word-dependency learning abilities [20]. Self-attention helps to learn complex relations between neighbours and their further neighbours, which may help with the binary classification problem.
CNNs need help in describing low-level features and can miss important information. Moreover, accurate detection is vital with minimum false alarms. Considering the need for Artificial intelligence (AI) based surveillance mechanism for smoker recognition in no-smoking indoor and outdoor environments, this study focuses on the interpretation of self-attention and multilayer perceptron (MLP) head for a better understanding of the employed deep learning method. To accurately recognize smokers, this work introduces the method SmokerViT for smoker recognition in smart city indoor and outdoor environments where the Transformer component learns the convolution-like features. In SmokerViT, the patch extractor is 16 × 16 convolution with stride 16. Its output is then multiplied by learnt weights to form q, k, and v embeddings of the self-attention layer. Moreover, the MLP residual block is a linear layer in SmokerViT that raises the embedding dimension by a factor of 4, adds non-linearity then lowers it back to the original. Further linear kernel
• This research utilizes the smoker detection dataset, which has 1120 images evenly distributed among the two classes (Smoking and NotSmoking). This research performs augmentations on the dataset to have a considerable number of images with various representations to overcome the dataset size limitation.
• This paper presents a novel end-to-end deep learning model called SmokerViT, which integrates transformer blocks and MLP head with a fully connected layer to learn complex features and linear kernel 2 regularizer for recognizing smokers. Moreover, SmokerViT, due to its discriminative multi-head self-attention, possesses the intrinsic capabilities to classify images irrespective of the backgrounds, image quality, and noisy artefacts.
• This research performs exhaustive analysis to optimize the SmokerViT model to achieve the best performance on the test dataset. It can facilitate future research as a starting point for efficient smoker recognition methods.
• The performance of the proposed SmokerViT model is compared with different deep-learning models on the smoker detection dataset. This work uses several evaluation metrics to assess the performance of the SmokerViT model, where it outperforms the existing state-of-the-art solutions in classification accuracy.
The research paper is organized as follows: Section 2 details the related work associated with this research, Section 3 gives the details of materials and methods adopted for solving the recognition task for the smoker detection problem, and Section 4 offers a detailed performance analysis of the proposed method and comparison with other methods and Section 5 concludes this research.
There has been some research on various applications of surveillance using computer vision based on different proposed CNN methods. These computer vision applications include human activity recognition, pedestrian detection, traffic monitoring, face recognition, vehicle identification, fire detection, motion detection, medical imaging, etc. Authors in [21] compared state-of-the-art machine learning algorithms for insurance fraud detection. The proposed study’s decision tree algorithm performed best for the considered task. Similarly, authors in [22] proposed an improved particle swarm optimization method for data classification. Their proposed method has been tested to optimize the weight of the feed-forward neural network for fifteen datasets. Another research [23] proposed CNN based model for person head detection for counting the crowd in sports videos. Their proposed method solves the multi-scale problem, which is the object detection problem’s core issue.
The smoker detection problem is relatively new and less explored, possibly due to the unavailability of open-access image/video datasets. Authors in [24] proposed a deep learning method based on YOLOv3-tiny named Improved YOLOv3-tiny to solve the problem of indoor low-precision smoke alarms on their local dataset. The proposed method combined the advantages of YOLOv3 and YOLOv3-tiny in terms of fewer parameters and higher accuracy for the localization task on their local smoker dataset. The proposed method considered the performance metrics of mAP for the localization task. It showed 85% mAP for improved YOLOv3-tiny compared to YOLOv3-tiny, which was 74%. However, their work limitations are the low mAP and the unavailability of the dataset. Another similar method [25] was proposed, named Eye-Smoker, YOLOv3 based transfer learning method for smoker detection on their local dataset. In the proposed method, the smoker is detected based on the cigarette and does not consider other kinds, such as e-cigarettes and smoking pipes. Their proposed method considered the localization task for smoker detection with 90% accuracy and around 94% mAP. Their limitations of work are the low accuracy and unavailability of the dataset. These object detection methods promote fast localization capabilities but lack high accuracy.
For the classification problem, false alarms should be kept minimal. A significantly high rate of false alarms in one class and a higher number of accurate classifications in another can lead to higher prediction accuracy; however, it might lack solving the desired problem. In [26], the authors proposed a SmokingNet model based on GoogleNet for smoker detection problems on their local dataset. Their work focused on evaluating the performance of smoking and not-smoking image classification with different performance metrics. In their proposed method, the smoking image characteristics are optimized based on the GoogleNet, and the feature extraction ability is enhanced using kernels of non-square convolution. The proposed method achieved 90% accuracy, 90% precision and recall, and 90% F1 measure. Their work limitations are using very basic GoogleNet as a base model and the unavailability of the dataset. In previously published work [27], the research proposed Inception-ResNet-V2-based transfer learning, where the pre-trained model was used as a backbone network for the smoker detection problem on the local smoker detection dataset. In the proposed method, the Inception-ResNet-V2 model is used, which is trained on the ImageNet dataset, the weights of the pre-trained Inception-ResNet-V2 are frozen, and new fully connected layers are added with ReLU and sigmoid activation functions. The fully connected layers learn the specific features of the task of smoker detection. The proposed method fed the complete image with an input size of
To solve the parallel processing of words by using self-attention in Recurrent Neural Network (RNN) models, a network called Transformer based on attention mechanism and removes recurrence and convolutions was proposed [28], which accomplished great success in natural language processing (NLP). After its success in NLP, an image classification model, Vision Transformer (ViT) [29], was introduced in computer vision, disrupting the traditional CNN model with its competitive performance on large-scale image datasets. With the development of transformers for computer vision in 2021, there has been some research for computer vision applications using vision-based transformers [30–32]. Transformers have seen much growth in image classification tasks with accuracy similar to if not more than, CNN models. In [33], the authors proposed a multi-instance vision transformer named MITformer for remote sensing scene classification. In their proposed method, the local feature response was highlighted for the remote sensing scenes. Attention-based MLP was inserted at the end of each encoder to enhance these features. Another work [34] proposed a hybrid CNN and ViT method, CTNet, to classify high-resolution remote sensing (HRRS) images. The proposed method has two modules, T-stream (stream for ViT) and C-stream (stream for CNN). In the T-stream, the flattened patches of the image are sent into the pre-trained ViT for semantic features in HRRS images. At the same time, C-stream is used to extract the local features. Ma et al. [35] proposed a homo-heterogeneous transformer learning (HTTL) for remote sensing scene classification. In the proposed HTTL, a patch generation module is used to design homo- and heterogeneous patches. The feature learning module extracts the feature information of global and local areas. A fusion submodule and metric learning-based classification module are used for the scene classification.
In other computer vision applications, authors [36] proposed detecting rain and road surface conditions using vision transformers. In their proposed method, a spatial self-attention network is proposed to analyze the relationship between the detection results of adjacent images as a sequence-to-sequence detection task. Dong et al. [37] proposed ViT based representation learning method for polarimetric synthetic aperture radar (PolSAR) image classification. In the proposed method, the ViT learned the global features of the PolSAR images, which improves the classification efficiency. In [38], the authors proposed a multilabel vision transformer ForestViT for multilabel classification of satellite images of deforestation, which adopts a self-attention mechanism, replacing the convolution operations. Wang et al. [39] proposed a double output vision transformer (DOViT) for air quality classification. The tokens are processed with multilabel self-attention (MSA) to extract features for higher accuracy. Authors [40] proposed Transformer based LPViT for classifying and detecting defects in printed circuit boards (PCBs). The proposed method used labels for better model strategy and mask patch prediction to ensure the relationship of different patch extractions.
However, deep learning-based algorithms were formerly thought of as a black box, and there have been issues with their interpretability for a long time [41–43]. CNNs face problems describing the low-level features outside the actual area of interest [44]. Taking advantage of the context information for feature extraction is not beneficial. This work exploits self-attention blocks and MLP head, which are building blocks of the proposed method for visually interpreting Smoking and NotSmoking images. In the proposed method SmokerViT, which is based on Transformer and MLP head, the smoker recognition problem is considered. It achieves better prediction accuracy without convolutions than the previously proposed CNN methods.
This section details the proposed SmokerViT and the image dataset used for Smoking and NotSmoking classes for recognition problems. The following subsections explain the methodology of this work.
The dataset for this study is the smoker detection dataset published online as open access, which has different images of people smoking and not smoking indoors and outdoors. To the best of our knowledge, there is no other open-access dataset related to the problem; the smoker detection dataset facilitates future work in proposing new methods. The dataset can be accessed from [27].
The smoker detection problem is considered binary, with two classes named, Smoking and NotSmoking. The NotSmoking class images are labeled 0, while the Smoking images have a class label 1. The smoker detection dataset is balanced and has 1120 images, with 560 images each in the Smoking and NotSmoking classes. This research splits the dataset into training and testing with a ratio of 80:20 with equal distribution from both classes. The training data is further divided into training and validation, with 716 images belonging to training samples and 180 for validation.
Smoker detection in no-smoking areas is a difficult task where many factors influence the development of an AI-based surveillance system. The smoker recognition problem is solved by using a smoker detection dataset. Higher detection accuracy needs a large dataset for training, although applying deep learning models significantly improves the results. If the dataset is too small, the model is at risk of over-fitting, which means it cannot generalize effectively and will result in poor performance on a new dataset. Therefore, to train a small dataset for deep learning, this work performed data augmentations to have multiple training samples to overcome the dataset size limitation. This research implemented various augmentation processes on the training dataset, as given in Table 1. This work performed various augmentations such as resizing, scaling, flipping, shifting, etc., as illustrated in Fig. 1. All the images in the dataset are resized to a uniform resolution of
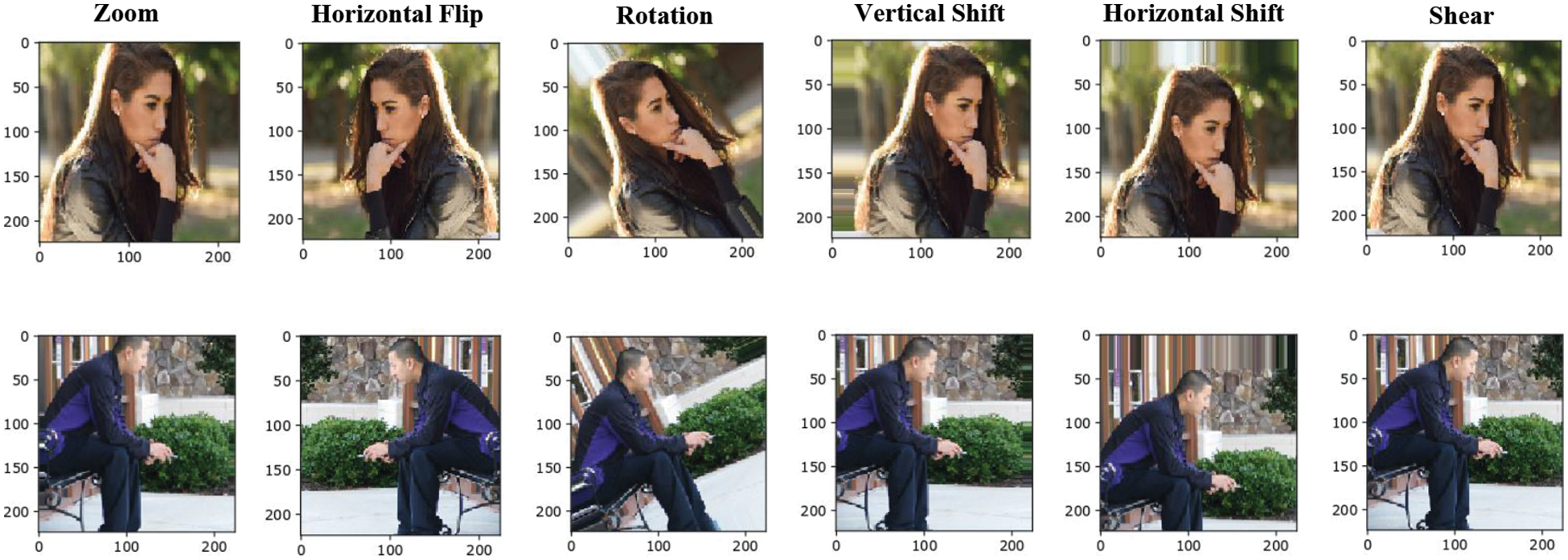
Figure 1: Sample data augmentations
To efficiently execute the recognition task, this research proposes SmokerViT inspired by Vision Transformer [29]. CNNs have been pivotal in solving the problems of computer vision-based applications. In CNN, the pixels of the image are interdependent, and instead of all pixels features being trained on, only extracted features from the image patches using filters are being used for training. However, if complete data of images are used for training, the chances of obtaining the best performance become higher, which is the main work of the Transformer for vision-based applications. In the proposed SmokerViT, the work first converted the image into patches of size

Figure 2: Working mechanism of SmokerViT
In SmokerViT, Vision Transformer takes the series of patches of images as input and predicts the class labels for the input image. The transformer differs from traditional CNNs, which do computations using pixel arrays. The Transformer divides the image into patches of fixed size. Then it inputs these patches into a linear projection of flattened patches embedding layer to produce vectors often known as tokens. These tokens precede a series of tokens. Additionally, the location data is provided by the position embedding. The Transformer encoder will receive these tokens as embedded patches and the location data. The Transformer encoder has the same number of outputs as inputs. The output corresponding to the class is then entered into the MLP head to output the prediction and classification. The architecture of SmokerViT is illustrated in Fig. 3.
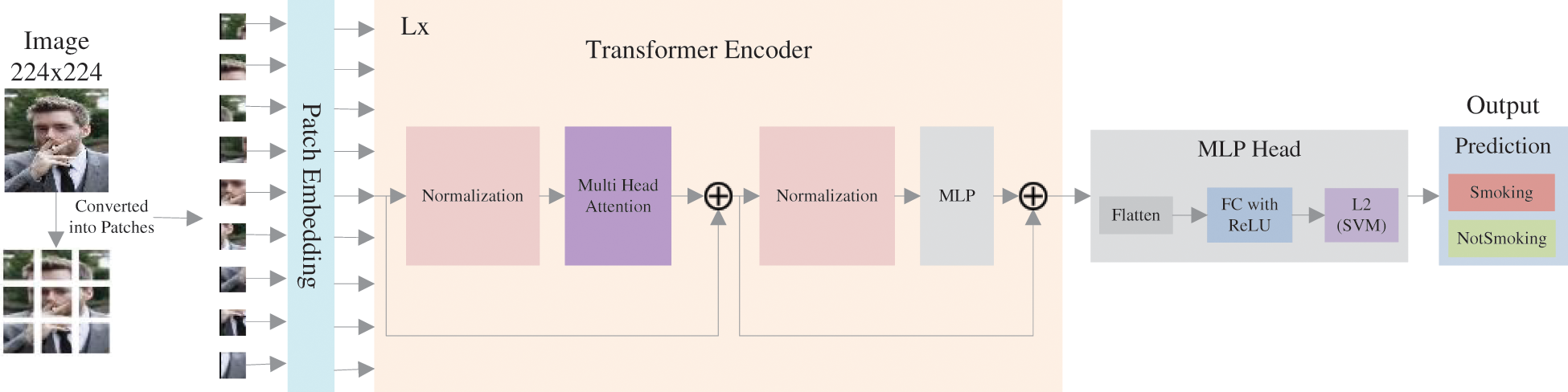
Figure 3: Architecture of SmokerViT
To consider the operation of SmokerViT in detail; first, the input image
MSA: This layer linearly integrates the attention output. The encoder receives a sequence of embedding to process, which undergoes three different linear transformations to output the three vectors query
where
LN: Layer normalization balances the mean-variance of each input neuron layer, making it converge faster. Layer normalization is added before each block, as it has no prior image dependencies, so it enhances the performance and decreases the execution time.
MLP: The MLP in the Transformer encoder consists of two layers with GeLU.
MLP head: After the Transformer encoder, the output is inserted into the newly added MLP head for the classification of Smoking and NotSmoking images, which consists of flatten layer to flatten the encoder output, dense layers with ReLU activation and linear kernel
The activation function optimizes the processes and learns complex features specific to the task. The proposed method considers ReLU (
This work considers RMSProp (Root Mean Squared Propagation) optimizer for the proposed SmokerViT method. RMSprop applies the exponential moving average of the squared gradients to adjust the learning rate. RMSprop only accumulates gradients in a specific fix window instead of letting all the gradients accumulate for momentum. The equation for RMSprop is as follows:
where
The binary cross entropy loss function is often used for binary classification. It helps to evaluate model accuracy by calculating the prediction probability. Following is the equation for the binary cross entropy loss function:
where
3.3.4 Linear Kernel
This work used the linear kernel
where
The performance of the proposed SmokerViT for smoker recognition is evaluated and compared with other methods on the smoker detection dataset. The system configurations for simulation are i7-11800H, 16 GB DDR4, NVIDIA RTX3060 6 GB, and the simulation setup is Anaconda Python 3.8 with Tensorflow 2.6 and Keras 2.3 libraries. The proposed SmokerViT is tested with various hyper-parameters values for the best results. Table 2 depicts the hyper-parameters for the simulations.
This section presents the evaluation metrics for analyzing the performance of the proposed SmokerViT method. This work evaluated the methods on the following metrics:
The
4.2 Attention Maps of Learned Features
This subsection interprets the visualization of the proposed method to understand the smoker recognition mechanism better. This research visualized the attention maps of some sample images predicted for the smoker recognition tasks from the self-attention block, illustrated in Fig. 4. Self-attention is the main reason the Transformer integrates data across the complete image, including in the base layers. The attention maps show how well the method utilizes this capacity for the considered task. Some attention heads already focus on the desired representations on most images in the initial layers, demonstrating that the proposed method employs the capability to integrate information globally. The attention to the desired features increases with the model depth, and it becomes clearer what features the model pays attention to for the desired task. The original input images are converted into pseudo-colour images to highlight the attention mask applied to the input image. It can be seen from the sample of images considered for both the Smoking and NotSmoking classes that the brighter part represents the attention mapping of the proposed method. Globally this research discovers that the method pays attention to image areas that are significant for classification in terms of semantics. From the maps, it can be noted that the attention of the method is on the cigarettes and their smoke for the detection of smokers. Similarly, the absence of cigarettes and smoke around the person’s mouth or hand is predicted to be a NotSmoking image.
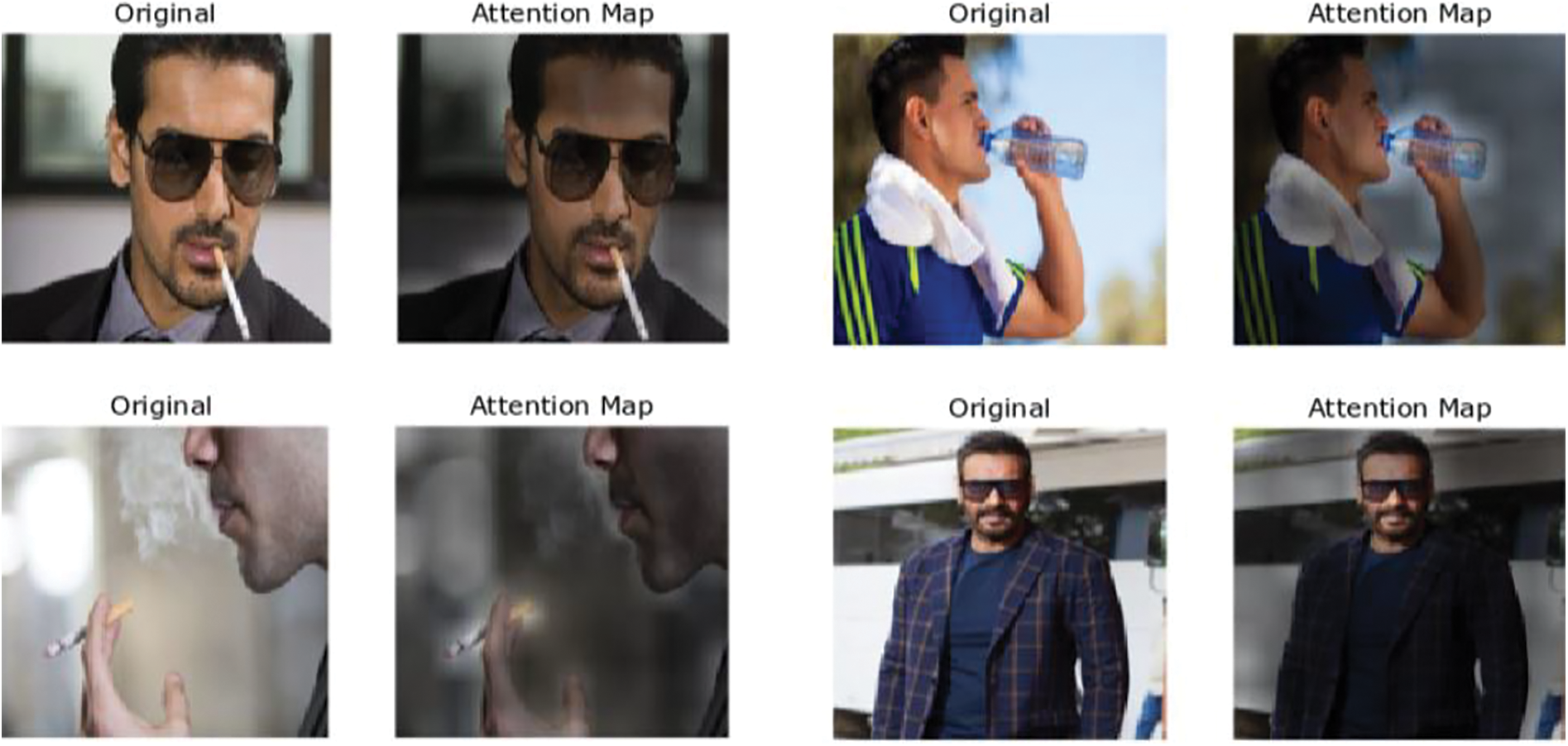
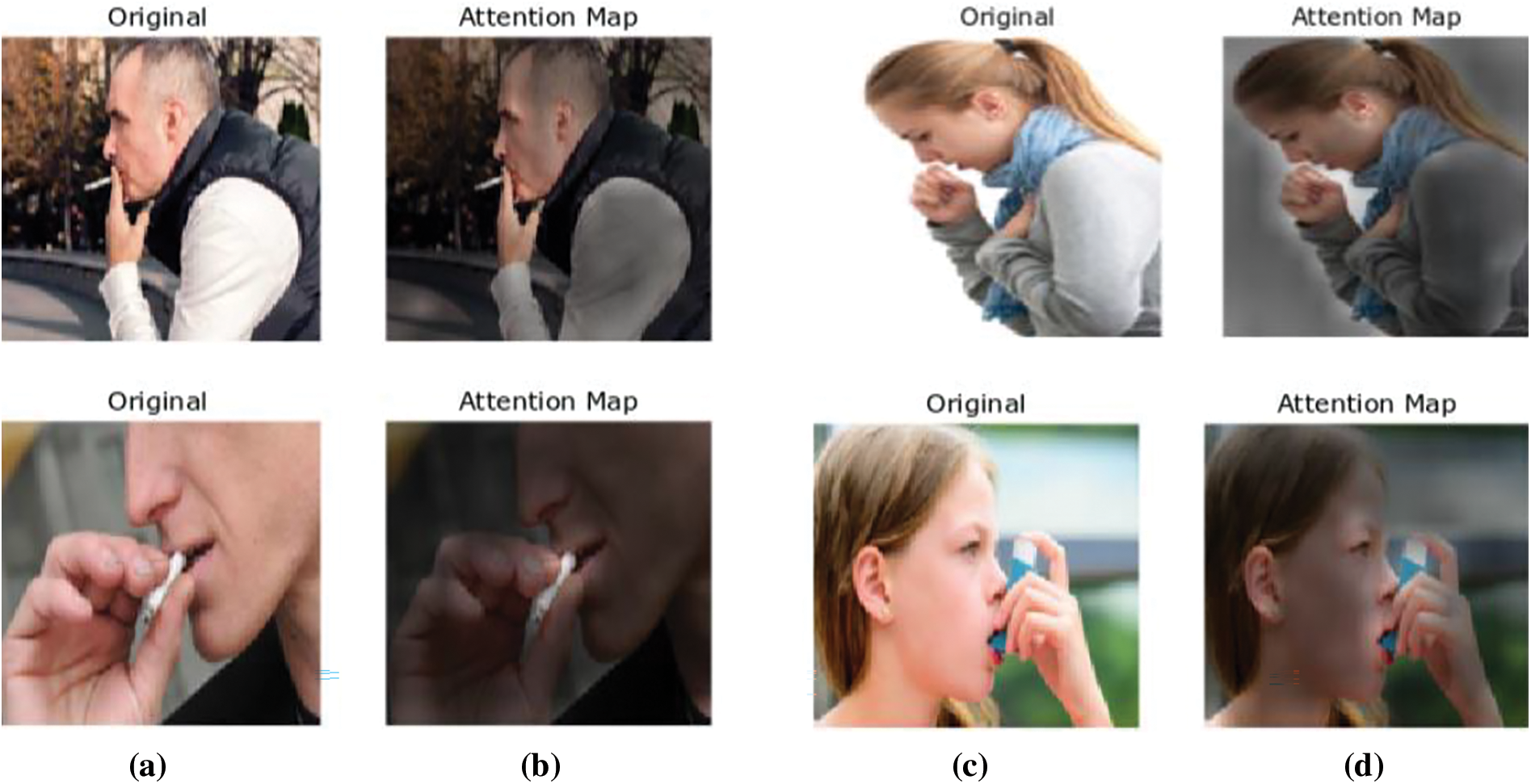
Figure 4: Sample images of smoking and NotSmoking (a, d) original and (b, c) attention maps
4.3 Performance Analysis of SmokerViT
This section presents the performance analysis of the proposed SmokerViT, a method based on the Transformer and MLP head. This work was analyzed by using different regularizers as a classifier to prove the effectiveness of linear kernel regularizer (
Table 3 presents the performance of SmokerViT in terms of prediction accuracy using different kernels. The result shows that using linear kernel
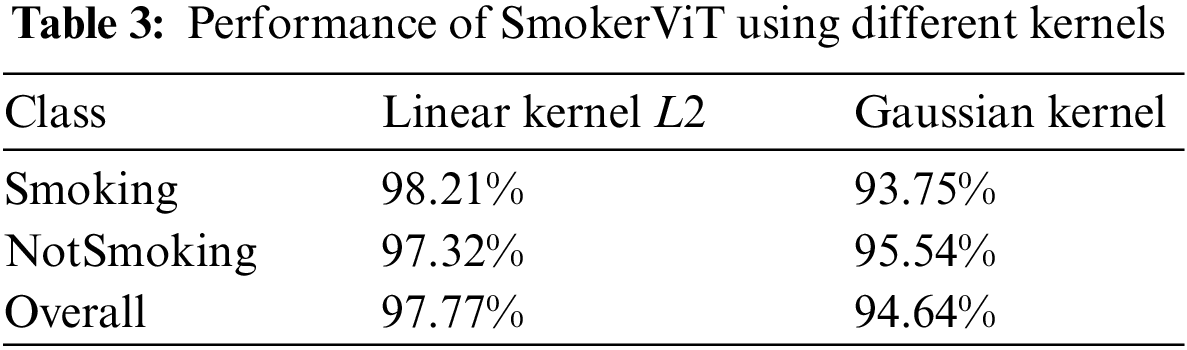
This work considered the best result obtained on linear kernel
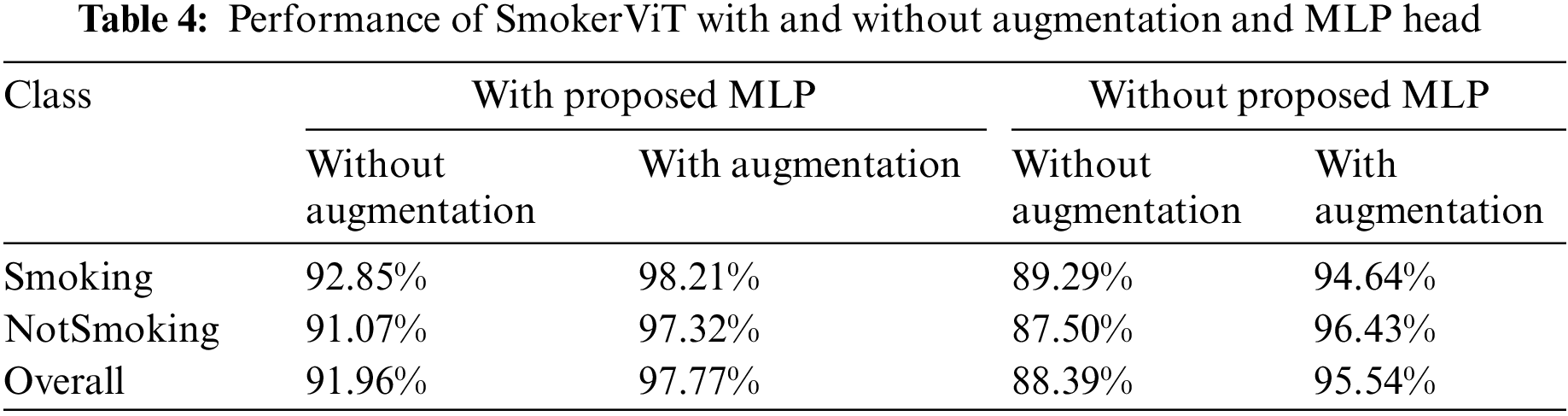
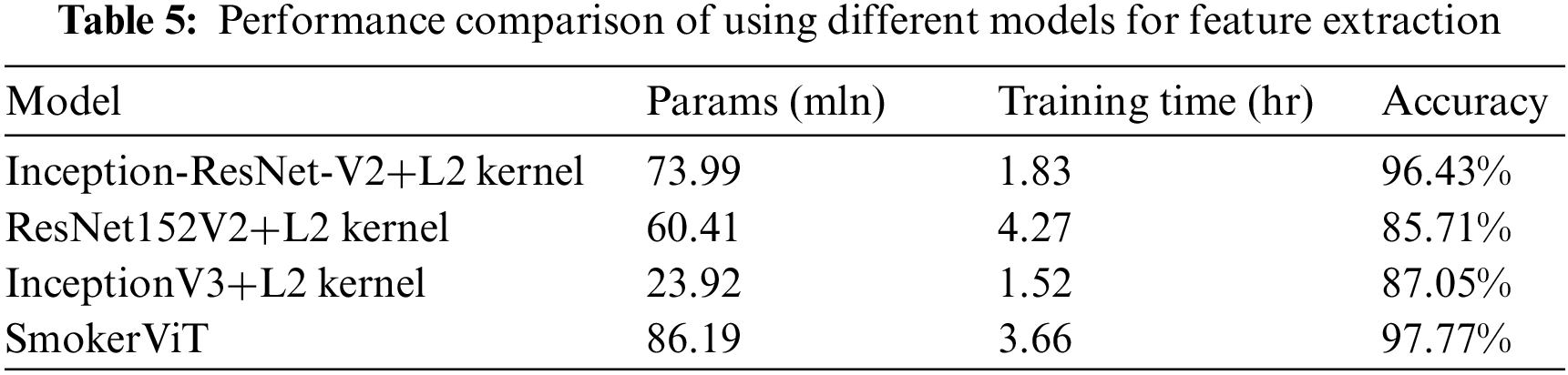
Moreover, this work performed simulations to show the effectiveness of using a Transformer as the main network over other SOTA models with an
The time complexity of the proposed SmokerViT model can be expressed as
The
It is worth noting that the SmokerViT model also has additional computational costs associated with the feedforward network and positional embeddings, but these are typically negligible compared to the self-attention computation.
The loss performance curves of the proposed SmokerViT in terms of training loss and validation loss are depicted in Fig. 5. The training phase of the proposed SmokerViT is carried out through 50 epochs. From the result, it can be noted that the training loss started at 76.24% and achieved less than 19.56% loss at the 10th epoch. After 10 epochs, the loss curve remained steady till the 50 epochs, with a final loss of 8.28%. Similarly, the validation loss started at 30.82% and reached 9.62% at the 10th epoch. After that, the loss curve remained steady till 50 epochs, with a final loss of 5.39%.
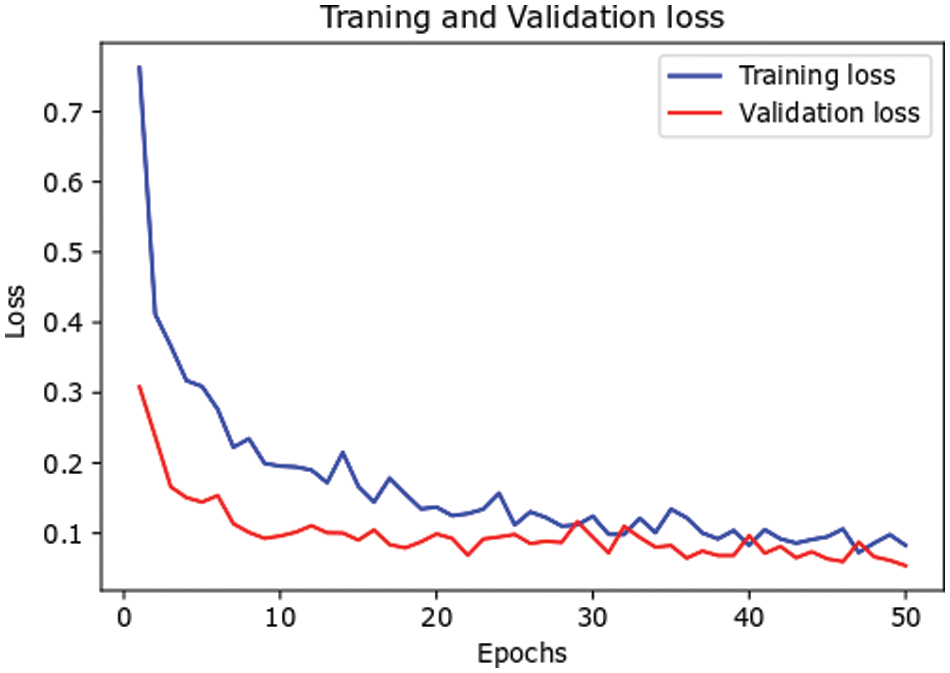
Figure 5: Loss performance of the proposed SmokerViT
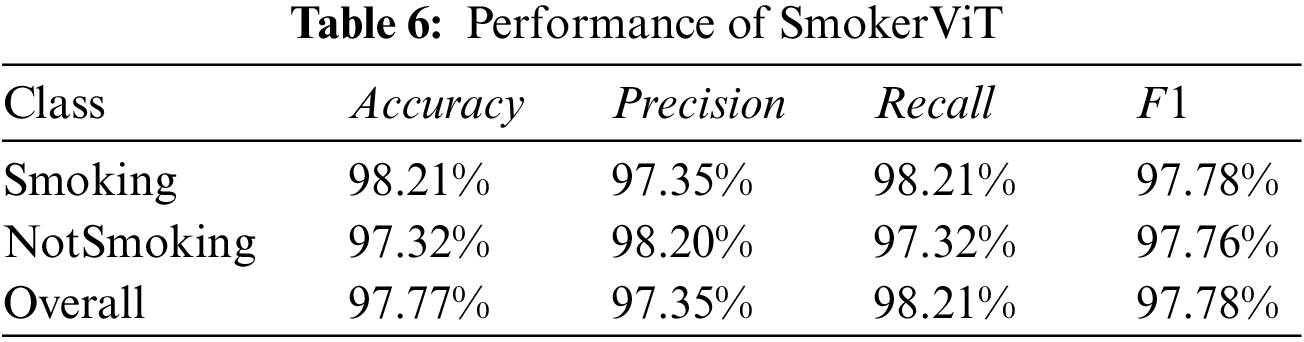
The confusion matrix depicts the predictive analysis of Smoking and NotSmoking image classification. It can be seen from the confusion matrix in Fig. 6 that the proposed SmokerViT displayed a prediction accuracy of 97.77% and 2.23% error rate with 109
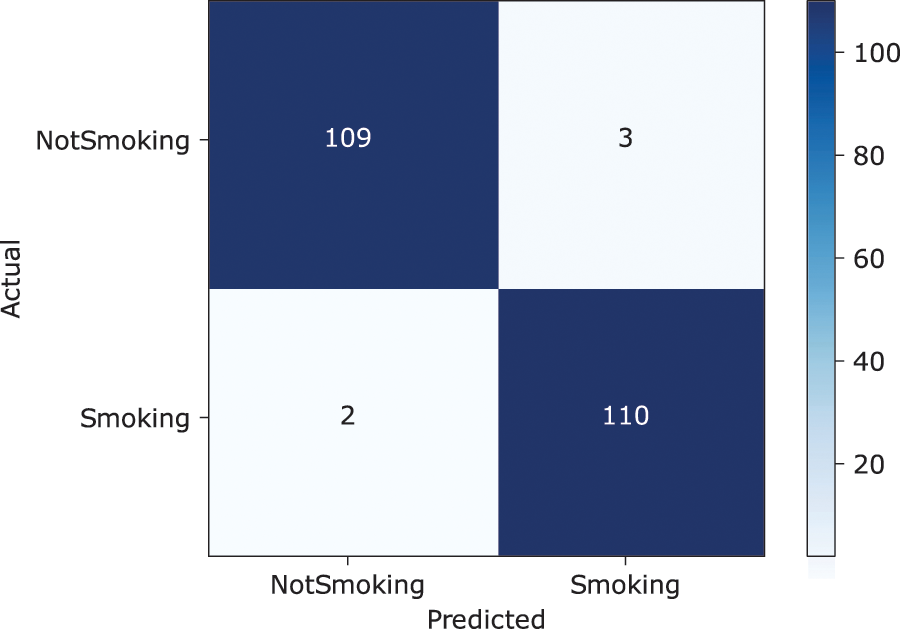
Figure 6: Confusion matrix of SmokerViT
Receiver Operating Characteristic (ROC) curve, shown in Fig. 7a, is another graphical representation for assessing the performance that shows the proposed method’s ability to predict classification with varying prediction thresholds. The ROC curve is plotted by considering Recall (
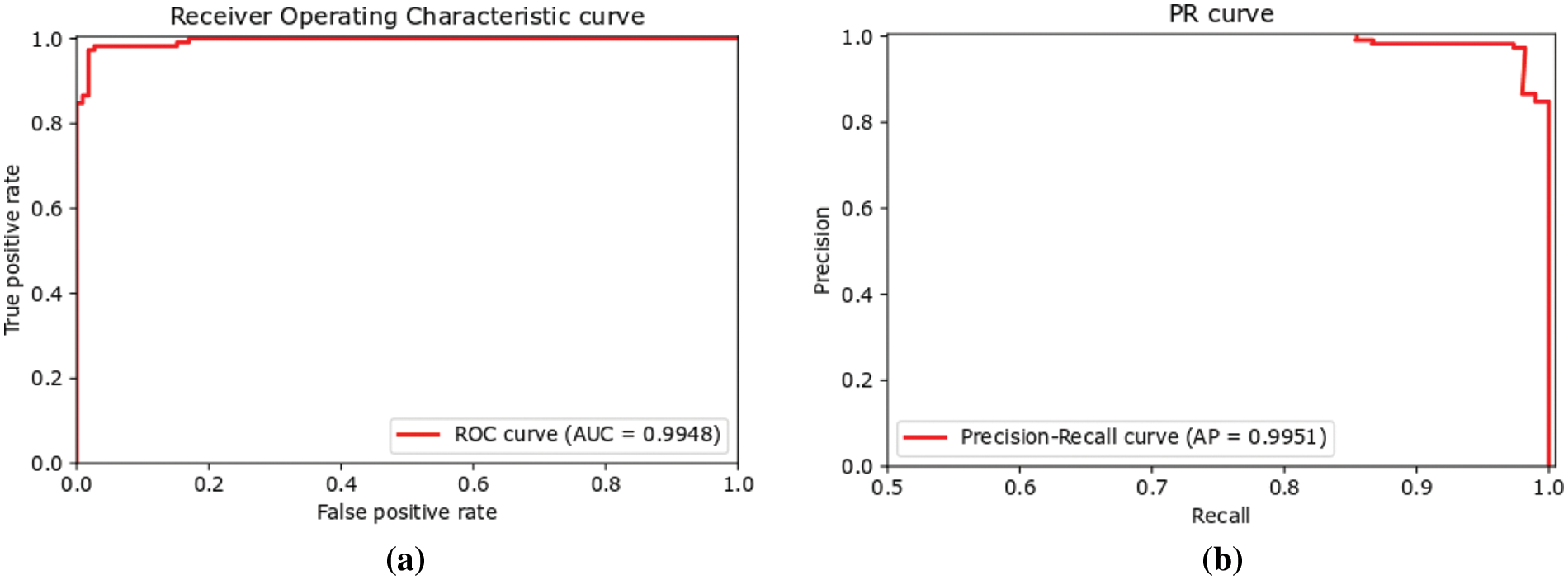
Figure 7: (a) Receiver operating characteristic curve with AUC and (b) precision-recall curve with AP
For the smoker recognition problem, false negatives should be minimal. From Fig. 8b, it can be seen that the false negative occurred when the background of the image is similar to the person in the image. In computer vision, spatial resolution is crucial, which has led to the inaccurate classification of the Smoking image as NotSmoking. Better-quality images let the model generalize more accurately. In addition, the neural network had trouble distinguishing between cigarette and the background pixels in the images when the background was blurry. The lack of a considerable number of varying images in the training set might also account for the false alarms. Another possible reason is that some photos in the test set were new to the model and lacked representation of comparable images in the training set. The model performed poorly in generalizing the novel scenarios.
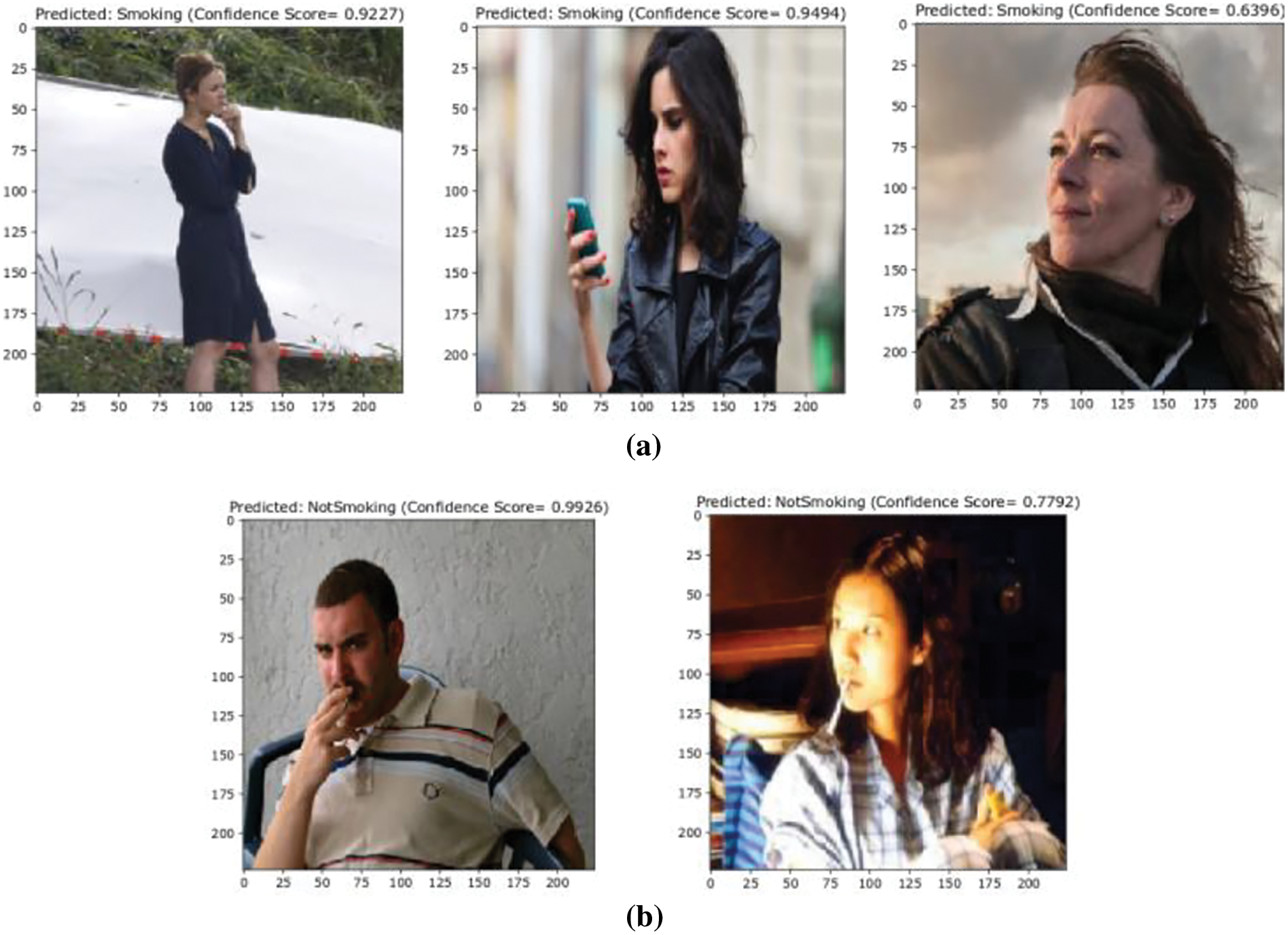
Figure 8: (a) False positives and (b) false negatives
Subsequently, a similar problem was seen with false positives. Smoker recognition relies heavily on the accuracy and practicality of the classifier, both of which are affected by the number of false positives. Images of false positives are shown in Fig. 8a. The scarcity of diversity in the training set and the variety of datasets may result in the incorrect classification of some NotSmoking images as Smoking. It can also be observed image with the background as a cloud was misclassified as Smoking; moreover, a similar hand gesture to the smoking was also labeled as Smoking.
4.4 Comparative Study with Other Methods
For validating the effectiveness of the proposed SmokerViT, this research compared the performance with other methods, both CNN and Transformer based models such as EfficientNetV2 [45], ResNest [46], MobileNetV3 [47], ResNetD [48], ViT [29], Levit [49], Davit [50] and Coatlite [51] on the smoker detection dataset. The hyperparameters are listed in Table 7. Table 8 presents the comparative analysis of these methods. It can be observed that SmokerViT displayed superiority over other considered methods in classifying the Smoking and NotSmoking classes. All the methods considered for comparison were used as pre-trained models using transfer learning and added the classification layer with a sigmoid activation function. After SmokerViT, ViT performed better among all the other considered methods for classification tasks on the local dataset for the smoker detection problem, as explained in Table 6. ViT achieved 96.43% accuracy, 96.43% sensitivity, and 96.43% specificity, followed by Levit with 94.64% accuracy, Coatlite with 91.07% accuracy, Davit with 90.18%, ResNetD with 88.40% accuracy, ResNest with 86.61% accuracy, EfficientV2 with 85.27% and at last MobileNetV3 with 82.14% accuracy. It can be observed that ResNetD and Davit outperformed ViT in terms of sensitivity at 97.32% compared to ViT at 96.43%. However, MobileNetV3 performed worse in terms of specificity than other models due to the significantly large number of false positives and considerably lower number of false negatives. The proposed method performed best among other considered methods in all evaluation metrics. MobileNetV3 has the lowest accuracy of 82.14% compared to other CNN methods for analyzing the unique smoker classification problem. Fig. 9 shows the performance comparison of all the methods on individual classes. SmokerViT achieves the best results on both classes, followed by ResNetD and Davit for Smoking class with 97.32% accuracy while ViT for NotSmoking class with 96.63% accuracy.
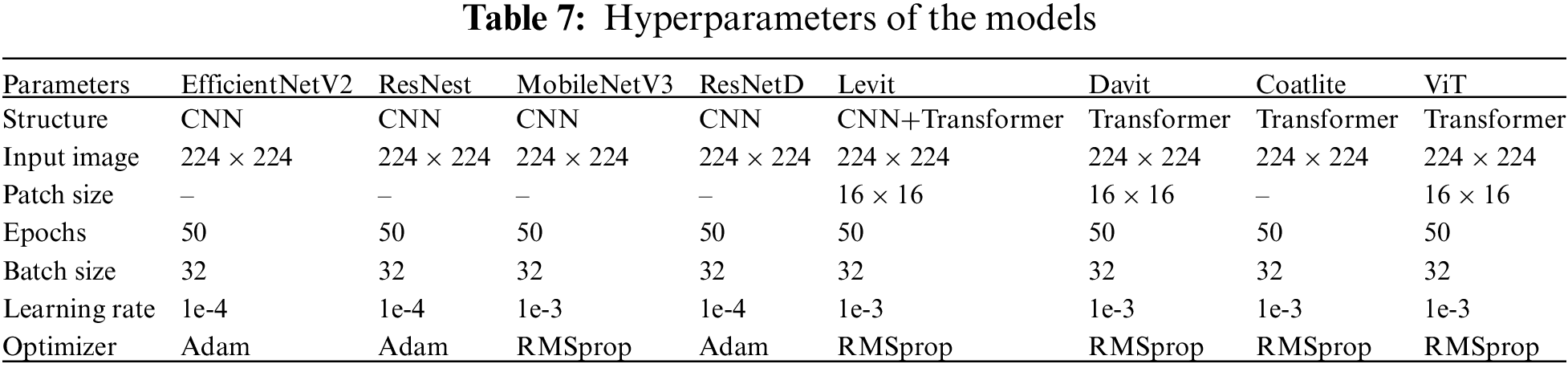

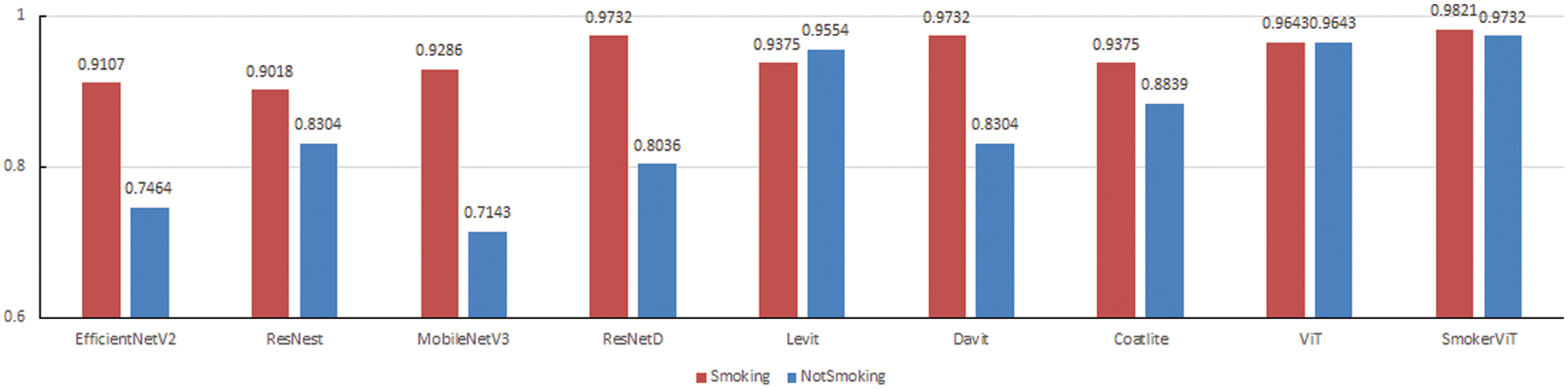
Figure 9: Performance comparison in terms of classes of SmokerViT and other methods
4.5 Comparative Study with Previous Work
This work compares the performance of the proposed SmokerViT with our previous work [27]. Table 9 shows SmokerViT has a better overall prediction accuracy of 97.77% compared to 96.87% by our previously proposed method InceptionResNetV2. It can be noted that SmokerViT has improved the performance of smoker recognition for both classes, where it displayed 98.21% and 97.32% accuracies in discriminating the Smoking and NotSmoking images, respectively. InceptionResNetV2 achieved 97.32% and 96.43% accuracies for the Smoking and NotSmoking classes. Fig. 10 compares the two methods in terms of precision, recall, and F1 measure. It can be observed that SmokerVit performed better in all the considered performance metrics, which is because the self-attention mechanism focuses on the entire image, unlike convolutions in CNN that focus on the interpretation of the high-level features rather than low-level features in classifying Smoking and NotSmoking images.

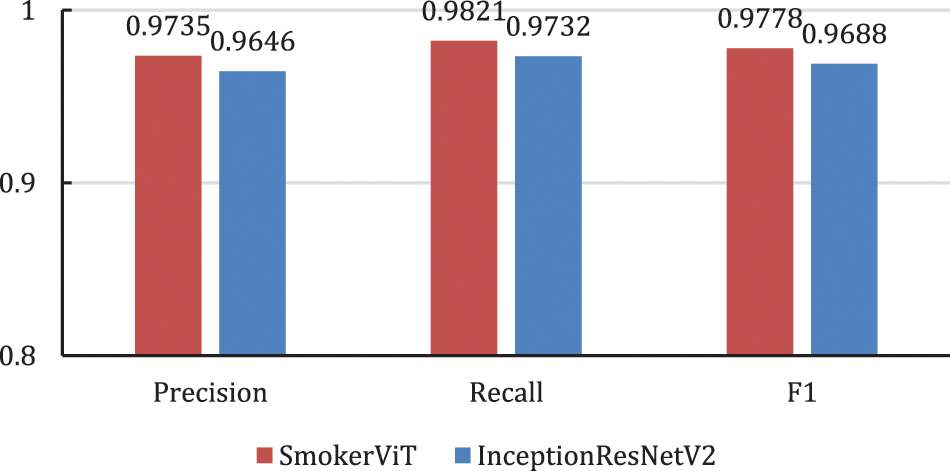
Figure 10: Performance of SmokerViT and InceptionResNetV2
In this research work, SmokerViT displayed self-attention capability and MLP Head to recognize Smoking and NotSmoking images. The results show that better performance is achieved by SmokerViT compared to the SOTA models, implying that the self-attention mechanism and MLP Head architecture may be more suitable than CNN for the Smoker recognition problem. In contrast to transformers, which can compute the attention of any patch, regardless of its distance, a CNN needs to perform additional convolutions to increase the receptive field to determine the relationship between any neighboring pixels, resulting in difficulty in possessing the ability to perform long-range computation. In SmokerViT, the patch embedding component is used to learn convolution-like features, whereas self-attention is used to learn important features and ignore the noisy ones. Results show that the SmokerViT performed better than CNN and Transformer based models, validating the superiority of using both the self-attention mechanism and MLP Head.
While looking at the results, it can be observed that the SmokerViT has performed better in both the Smoking and NotSMoking classes. However, CNNs models were better at predicting Smoking images while poorly classifying NotSmoking class compared to Transformer based models, which performed well in classifying both the Smoking and NotSmoking classification. While SmokerViT was equally good in classifying both classes indicating that SmokerViT is more robust than using CNN or transformer-based models in dealing with balanced datasets.
Many researchers used CNN for the smoker detection problem, but there is not much work on this problem. This is the first time using transformers and MLP Head with Linear kernel
This research proposed a transformer-based smoker recognition method. For effective surveillance of the no-smoking areas, this research proposed SmokerViT based on the self-attention mechanism instead of CNN. The dataset for this work has two classes with 560 images each for the Smoking and Notsmoking classes. Further, this work performed augmentations on the smoker detection dataset to have many images with various representations to overcome the dataset size limitation. The proposed SmokerViT is inspired by Vision Transformer and adding our own MLP head block, which has a dense layer with ReLU activation function and linear kernel
For future works, several issues that were not addressed in this research need to be observed. The effect of dataset size on the training performance of the method and data augmentation by various complex models for ensuring further variances of the image representations can be considered for future study. Moreover, the weak point of this research is the higher number of parameters and high execution time. In future work, this point would be considered for designing the model, which is lightweight and, at the same time, yield higher accuracy. Moreover, the hybrid method of convolutions and transformer might help the smoker recognition system to perform better, considering the shortcomings of the proposed method.
Acknowledgement: Authors are thankful to the reviewers for their valuable comments.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: A.K.; data collection: A.K.; analysis and interpretation of results: A.K., S.K., B.H. and R.K.; draft manuscript preparation: A.K., S.K., B.H. and R.K.; writing—review and editing, A.K., S.K., B.H., R.K. and Z.Z.; funding acquisition, A.K. and Z.Z. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The dataset considered in this study can be accessed from https://data.mendeley.com/datasets/j45dj8bgfc/1.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Report on Tobacco, World Health Organization, 2022. [Online]. Available: https://www.who.int/news-room/fact-sheets/detail/tobacco [Google Scholar]
2. Hannah Ritchie and Max Roser, “Smoking,” Our World in Data, 2013. [Online]. Available: https://ourworldindata.org/smoking [Google Scholar]
3. WHO Framework Convention on Tobacco Control, 2003. [Online]. Available: https://fctc.who.int/who-fctc/overview [Google Scholar]
4. N. G. La Vigne, S. S. Lowry, J. A. Markman and A. M. Dwyer, “Evaluating the use of public surveillance cameras for crime control and prevention: A summary,” Urban Institute, pp. 1–4, 2011. https://www.urban.org/research/publication/evaluating-use-public-surveillance-cameras-crime-control-and-prevention [Google Scholar]
5. V. Tsakanikas and T. Dagiuklas, “Video surveillance systems-current status and future trends,” Computers & Electrical Engineering, vol. 70, pp. 736–753, 2018. [Google Scholar]
6. B. R. Raiff, C. Karatas, E. A. McClure, D. Pompili and T. A. Walls, “Laboratory validation of inertial body sensors to detect cigarette smoking arm movements,” Electronics, vol. 3, pp. 87–110, 2014. [Google Scholar] [PubMed]
7. V. Y. Senyurek, M. H. Imtiaz, P. Belsare, S. Tiffany and E. Sazonov, “Smoking detection based on regularity analysis of hand to mouth gestures,” Biomedical Signal Processing and Control, vol. 51, pp. 106–112, 2019. [Google Scholar] [PubMed]
8. A. I. Khan and S. Al-Habsi, “Machine learning in computer vision,” Procedia Computer Science, vol. 167, pp. 1444–1451, 2020. [Google Scholar]
9. Y. LeCun, Y. Bengio and G. Hinton, “Deep learning,” Nature, vol. 521, pp. 436–444, 2015. [Google Scholar] [PubMed]
10. A. Khan, B. Hassan, S. Khan, R. Ahmed and A. Adnan, “DeepFire: A novel dataset and deep transfer learning benchmark for forest fire detection,” Mobile Information System, vol. 2022, pp. 5358359, 2022. [Google Scholar]
11. S. Khan and A. Khan, “FFireNet: Deep learning based forest fire classification and detection in smart cities,” Symmetry, vol. 14, no. 10, pp. 2155, 2022. [Google Scholar]
12. A. S. Panayides, A. Amini, N. D. Filipovic, A. Shama, S. A. Tsaftaris et al., “AI in medical imaging informatics: Current challenges and future directions,” IEEE Journal of Biomedical and Health Informatics, vol. 24, no. 7, pp. 1837–1857, 2020. [Google Scholar] [PubMed]
13. J. Ni, K. Shen, Y. Chen, W. Cao and S. X. Yang, “An improved deep network-based scene classification method for self-driving cars,” IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1–14, 2022. [Google Scholar]
14. A. Krizhevsky, I. Sutskever and G. E. Hinton, “Imagenet classification with deep convolutional neural networks,” Communications of the ACM, vol. 60, pp. 84–90, 2017. [Google Scholar]
15. K. Simonyan and A. Zisserman, “Very deep convolutional networks for large-scale image recognition,” in Proc. of the Int. Conf. on Learning Representations (ICLR), San Diego, CA, USA, 2015. [Google Scholar]
16. K. He, X. Zhang, S. Ren and J. Sun, “Deep residual learning for image recognition,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, pp. 770–778, 2016. [Google Scholar]
17. C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed et al., “Going deeper with convolutions,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, pp. 1–9, 2015. [Google Scholar]
18. G. Huang, Z. Liu, L. van der Maaten and K. Q. Weinberger, “Densely connected convolutional networks,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, pp. 2261–2269, 2017. [Google Scholar]
19. X. Wang, R. Girshick, A. Gupta and K. He, “Non-local neural networks,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, pp. 7794–7803, 2018. [Google Scholar]
20. J. B. Cordonnier, A. Loukas and M. Jaggi, “On the relationship between self-attention and convolutional layers,” in Proc. of the Int. Conf. on Learning Representation (ICLR), Virtual, pp. 1–18, 2020. [Google Scholar]
21. L. Rukhsar, W. H. Bangyal, K. Nisar and S. Nisar, “Prediction of insurance fraud detection using machine learning algorithms,” Mehran University Research Journal of Engineering and Technology, vol. 41, no. 1, pp. 33–40, 2022. [Google Scholar]
22. W. H. Bangyal, K. Nisar, T. R. Soomro, A. A. Ag Ibrahim, A. G. Mallah et al., “An improved particle swarm optimization algorithm for data classification,” Applied Sciences, vol. 13, no. 1, pp. 283, 2023. [Google Scholar]
23. S. D. Khan, H. Ullah, M. Ullah, N. Conci, F. A. Cheikh et al., “Person head detection based deep model for people counting in sports videos,” in Proc. of the IEEE Int. Conf. on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, pp. 1–8, 2019. [Google Scholar]
24. R. T. Zhao, M. Y. Wang, Z. L. Zhai, P. Li and Q. Y. Zeng, “Indoor smoking behavior detection based on YOLOv3-tiny,” in Proc. of the Chinese Automation Cong. (CAC), Hangzhou, China, pp. 3477–3481, 2019. [Google Scholar]
25. J. R. Macalisang, N. E. Merencilla, M. A. D. Ligayo, M. P. Melegrito and R. R. Tejada, “Eye-smoker: A machine vision-based nose inference system of cigarette smoking detection using convolutional neural network,” in Proc. of the IEEE Int. Conf. on Engineering Technologies and Applied Sciences (ICETAS), Kuala Lumpur, Malaysia, pp. 1–5, 2020. [Google Scholar]
26. D. Zhang, C. Jiao and S. Wang, “Smoking image detection based on convolutional neural networks,” in Proc. of the IEEE Int. Conf. on Computer and Communications (ICCC), Chengdu, China, pp. 1509–1515, 2018. [Google Scholar]
27. A. Khan, S. Khan, B. Hassan and Z. Zheng, “CNN-based smoker classification and detection in smart city application,” Sensors, vol. 22, no. 3, pp. 892, 2022. [Google Scholar] [PubMed]
28. A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones et al., “Attention is all you need,” in Proc. of Conf. on Neural Information Processing Systems (NIPS), Long Beach, CA, US, pp. 6000–6010, 2017. [Google Scholar]
29. A. Dosovitskiy, L. Beyer, A. Kolesnikov, D. Weissenborn, X. Zhai et al., “An image is worth 16 × 16 words: Transformers for image recognition at scale,” in Proc. of the Int. Conf. on Learning Representations (ICLR), 2021. [Google Scholar]
30. H. Touvron, M. Cord, M. Douze, F. Massa, A. Sablayrolles et al., “Training data-efficient image transformers & distillation through attention,” in Proc. of the Int. Conf. on Machine Learning (ICML), Virtual, pp. 10347–10357, 2021. [Google Scholar]
31. Z. Zhang, W. Song and Q. Li, “Dual-aspect self-attention based on transformer for remaining useful life prediction,” IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1–11, 2022. [Google Scholar]
32. Q. Luo, J. Su, C. Yang, W. Gui, O. Silvén et al., “CAT-EDNet: Cross-attention transformer-based encoder-decoder network for salient defect detection of strip steel surface,” IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1–13, 2022. [Google Scholar]
33. Z. Sha and J. Li, “MITformer: A multiinstance vision transformer for remote sensing scene classification,” IEEE Geoscience and Remote Sensing Letters, vol. 19, pp. 1–5, 2022. [Google Scholar]
34. P. Deng, K. Xu and H. Huang, “When CNNs meet vision transformer: A joint framework for remote sensing scene classification,” IEEE Geoscience and Remote Sensing Letters, vol. 19, pp. 1–5, 2022. [Google Scholar]
35. J. Ma, M. Li, X. Tang, X. Zhang, F. Liu et al., “Homo-heterogenous transformer learning framework for RS scene classification,” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 15, pp. 2223–2239, 2022. [Google Scholar]
36. A. Abdelraouf, M. Abdel-Aty and Y. Wu, “Using vision transformers for spatial-context-aware rain and road surface condition detection on freeways,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 10, pp. 18546–18556, 2022. [Google Scholar]
37. H. Dong, L. Zhang and B. Zou, “Exploring vision transformers for polarimetric SAR image classification,” IEEE Transactions on Geoscience and Remote Sensing, vol. 60, pp. 1–15, 2022. [Google Scholar]
38. M. Kaselimi, A. Voulodimos, I. Daskalopoulos, N. Doulamis and A. Doulamis, “A vision transformer model for convolution-free multilabel classification of satellite imagery in deforestation monitoring,” IEEE Transactions on Neural Networks and Learning Systems, vol. 34, no. 7, pp. 3299–3307, 2023. [Google Scholar] [PubMed]
39. Z. Wang, Y. Yang and S. Yue, “Air quality classification and measurement based on double output vision transformer,” IEEE Internet of Things Journal, vol. 9, no. 21, pp. 20975–20984, 2022. [Google Scholar]
40. K. An and Y. Zhang, “LPViT: A transformer based model for PCB image classification and defect detection,” IEEE Access, vol. 10, pp. 42542–42553, 2022. [Google Scholar]
41. D. Castelvecchi, “Can we open the black box of AI?” Nature, vol. 538, pp. 20–23, 2016. [Google Scholar] [PubMed]
42. R. R. Selvaraju, M. Cogswell, A. Das, R. Vedantam, D. Parikh et al., “Grad-CAM: Visual explanations from deep networks via gradient-based localization,” in Proc. of the IEEE Int. Conf. on Computer Vision (ICCV), Venice, Italy, pp. 618–626, 2017. [Google Scholar]
43. S. Serrano and N. A. Smith, “Is attention interpretable?” arXiv:1906.03731, 2019. [Google Scholar]
44. M. Raghu, T. Unterthiner, S. Kornblith, C. Zhang and A. Dosovitskiy, “Do vision transformers see like convolutional neural networks?” in Proc. of Neural Information Processing Systems, Virtual, vol. 34, 2021. [Google Scholar]
45. M. Tan and Q. Le, “EfficientNetV2: Smaller models and faster training,” in Proc. of the Int. Conf. on Machine Learning (ICML), Virtual, pp. 10096–10106, 2021. [Google Scholar]
46. H. Zhang, C. Wu, Z. Zhang, Y. Zhu, H. Lin et al., “ResNeSt: Split-attention networks,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, pp. 2736–2746, 2022. [Google Scholar]
47. A. Howard, M. Sandler, G. Chu, B. Chen, W. Wang et al., “Searching for MobileNetV3,” in Proc. of the IEEE/CVF Int. Conf. on Computer Vision (ICCV), Seoul, South Korea, pp. 1314–1324, 2019. [Google Scholar]
48. T. He, Z. Zhang, H. Zhang, Z. Zhang, J. Xie et al., “Bag of tricks for image classification with convolutional neural networks,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, pp. 558–567, 2019. [Google Scholar]
49. B. Graham, A. El-Nouby, H. Touvron, P. Stock, A. Joulin et al., “LeViT: A vision transformer in ConvNet’s clothing for faster inference,” in Proc. of the IEEE Int. Conf. on Computer Vision (ICCV), Virtual, pp. 12239–12249, 2021. [Google Scholar]
50. M. Ding, B. Xiao, N. Codella, P. Luo, J. Wang et al., “DaViT: Dual attention vision transformers,” arXiv:2204.03645, 2022. [Google Scholar]
51. W. Xu, Y. Xu, T. Chang and Z. Tu, “Co-scale conv-attentional image transformers,” in Proc. of the IEEE Int. Conf. on Computer Vision (ICCV), Virtual, pp. 9961–9970, 2021. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools