
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Resource Allocation in V2X Networks: A Double Deep Q-Network Approach with Graph Neural Networks
1 School of Computer Science and Technology, Shandong University of Technology, Zibo, 255000, China
2 School of Electrical and Electronics Engineering, Shandong University of Technology, Zibo, 255000, China
* Corresponding Author: Jian Sun. Email:
Computers, Materials & Continua 2025, 84(3), 5427-5443. https://doi.org/10.32604/cmc.2025.065860
Received 23 March 2025; Accepted 12 June 2025; Issue published 30 July 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
With the advancement of Vehicle-to-Everything (V2X) technology, efficient resource allocation in dynamic vehicular networks has become a critical challenge for achieving optimal performance. Existing methods suffer from high computational complexity and decision latency under high-density traffic and heterogeneous network conditions. To address these challenges, this study presents an innovative framework that combines Graph Neural Networks (GNNs) with a Double Deep Q-Network (DDQN), utilizing dynamic graph structures and reinforcement learning. An adaptive neighbor sampling mechanism is introduced to dynamically select the most relevant neighbors based on interference levels and network topology, thereby improving decision accuracy and efficiency. Meanwhile, the framework models communication links as nodes and interference relationships as edges, effectively capturing the direct impact of interference on resource allocation while reducing computational complexity and preserving critical interaction information. Employing an aggregation mechanism based on the Graph Attention Network (GAT), it dynamically adjusts the neighbor sampling scope and performs attention-weighted aggregation based on node importance, ensuring more efficient and adaptive resource management. This design ensures reliable Vehicle-to-Vehicle (V2V) communication while maintaining high Vehicle-to-Infrastructure (V2I) throughput. The framework retains the global feature learning capabilities of GNNs and supports distributed network deployment, allowing vehicles to extract low-dimensional graph embeddings from local observations for real-time resource decisions. Experimental results demonstrate that the proposed method significantly reduces computational overhead, mitigates latency, and improves resource utilization efficiency in vehicular networks under complex traffic scenarios. This research not only provides a novel solution to resource allocation challenges in V2X networks but also advances the application of DDQN in intelligent transportation systems, offering substantial theoretical significance and practical value.Keywords
In the context of smart cities, V2X plays a crucial role in intelligent transportation systems. This technology enables comprehensive communication between vehicles and their surrounding environments, including V2V, V2I, Vehicle-to-Pedestrian (V2P), and Vehicle-to-Network (V2N) communication [1]. As the automotive industry advances towards technologies such as autonomous driving, intelligent navigation, and automated parking, the importance of V2X continues to grow. However, V2X still faces critical challenges in balancing communication performance and safety constraints.
To address these issues, various V2X technologies have been developed. Recently, among these technologies, Cellular Vehicle-to-Everything (C-V2X) has been recognized as a critical technology [2]. It offers higher data transmission rates, lower latency, and better reliability than IEEE 802.11p technology. Additionally, the 3rd Generation Partnership Project (3GPP) has standardized New Radio Vehicle-to-Everything (NR-V2X) technology in its Release 16 standards [3]. However, with the deployment of these advanced technologies, new challenges arise. One key challenge is the resource allocation problem, which is crucial to support the substantial wireless communication demands of V2X. This problem is NP-hard, making it difficult to simultaneously satisfy the reliability requirements of V2V links and the rate requirements of V2I links in vehicular networks. Traditional resource allocation methods rely on accurate Channel State Information (CSI), which is difficult to obtain in high-speed vehicular environments.
These new challenges are difficult to address with traditional methods, prompting research to shift towards advanced algorithms [4]. In recent years, deep learning methods have developed rapidly, particularly Deep Reinforcement Learning (DRL), which leverages the powerful function approximation capabilities of deep learning. Reference [5] addresses the spectrum sharing problem in vehicular networks using multi-agent reinforcement learning, where multiple V2V links share a frequency spectrum with V2I links. DRL is particularly effective for solving resource allocation problems, especially in environments where CSI is unreliable. By continuously learning through trial and error to develop strategies that maximize long-term rewards, DRL ultimately enhances the performance of distributed resource allocation systems. DRL has also been explored as a tool for enhancing energy efficiency in vehicular communications. For instance, references [6] and [7] demonstrate how reinforcement learning can minimize transmission power or reduce energy consumption while maintaining communication reliability, highlighting the growing importance of energy-aware decision-making in V2X resource allocation.
To address these challenges, researchers have explored various machine learning methods, such as CNN, DNN, LSTM, and GNN [8]. Among them, GNN has demonstrated exceptional performance. Reference [9] proposes an edge-update mechanism for GNNs to efficiently manage radio resources in wireless networks. This approach improves the sum rate and reduces computation time compared to state-of-the-art methods while demonstrating strong scalability and generalization.
Although recent studies have applied GNNs to resource allocation in vehicular networks, such efforts remain limited in scope and number [10]. These approaches often model the network as a complete graph, assuming that all communication links mutually influence each other. While such modeling can be effective under moderate traffic conditions, it becomes computationally infeasible in high-density scenarios, resulting in excessive complexity and unacceptable decision latency for real-time applications. Furthermore, most existing GNN-based methods rely on fixed or predefined neighbor sampling strategies, which are ill-suited to the dynamic and heterogeneous interference patterns characteristic of vehicular environments. This limitation often leads to suboptimal resource allocation outcomes.
In addition, few GNN-based solutions consider the trade-off between communication performance and energy efficiency—an increasingly important issue as vehicular networks move toward electric and autonomous systems. Recent studies [11] have shown that graph-based representations can support not only interference modeling but also energy-efficient decision-making in large-scale networks. Parallel to these challenges, traditional DQN-based reinforcement learning frameworks suffer from overestimation bias due to the shared use of a single network for both action selection and evaluation. This issue compromises training stability and weakens policy robustness in complex, dynamic environments [12]. In addition to communication and energy-related constraints, resource allocation in vehicular networks must also address task-level requirements, particularly in multi-agent systems. For instance, integrated task assignment and path planning under capacity constraints, such as those studied in capacitated multi-agent pickup and delivery problems, are highly relevant to cooperative vehicular environments. These problems involve combinatorial complexity and inter-agent dependencies, directly influencing how communication and computational resources should be dynamically distributed.
To overcome the aforementioned limitations, this paper proposes an innovative framework that integrates GNNs and DRL to enhance the efficiency of distributed resource allocation and mitigate the impact of inaccurate local observations. Specifically, the framework constructs a dynamic graph with communication links as nodes and inter-link interference as edges, enabling adaptive adjustments to the network topology. It incorporates three key innovations: adaptive graph construction with dynamic neighbor sampling based on interference and spatial relevance, GAT-based personalized feature aggregation, and the integration of GNN with Double DQN to improve stability and decision quality in dynamic vehicular environments.
2 System Model and Problem Formulation
Building on the challenges discussed earlier, this section focuses on modeling the V2I and V2V communication scenarios in the V2X paradigm, particularly targeting efficient resource allocation in dynamic vehicular networks. As shown in Fig. 1, the system is modeled based on a vehicular traffic scenario at an intersection, where the Base Station (BS) is located at the center. Vehicles enter the roads with randomly selected speeds and maintain a constant velocity. V2V communication is primarily used for exchanging safety-critical messages between vehicles, while V2I links support high-throughput data transmission to the BS, such as infotainment content. The resource allocation mechanism follows C-V2X mode-4, where vehicles, as agents in the system, use DDQN to determine the best subchannel and power level [13]. A shared reward function is designed to jointly optimize the selection of spectrum and power levels in the network. This decentralized resource allocation framework leverages local vehicle interactions and learned policies to ensure efficient and effective resource utilization in dynamic vehicular environments.
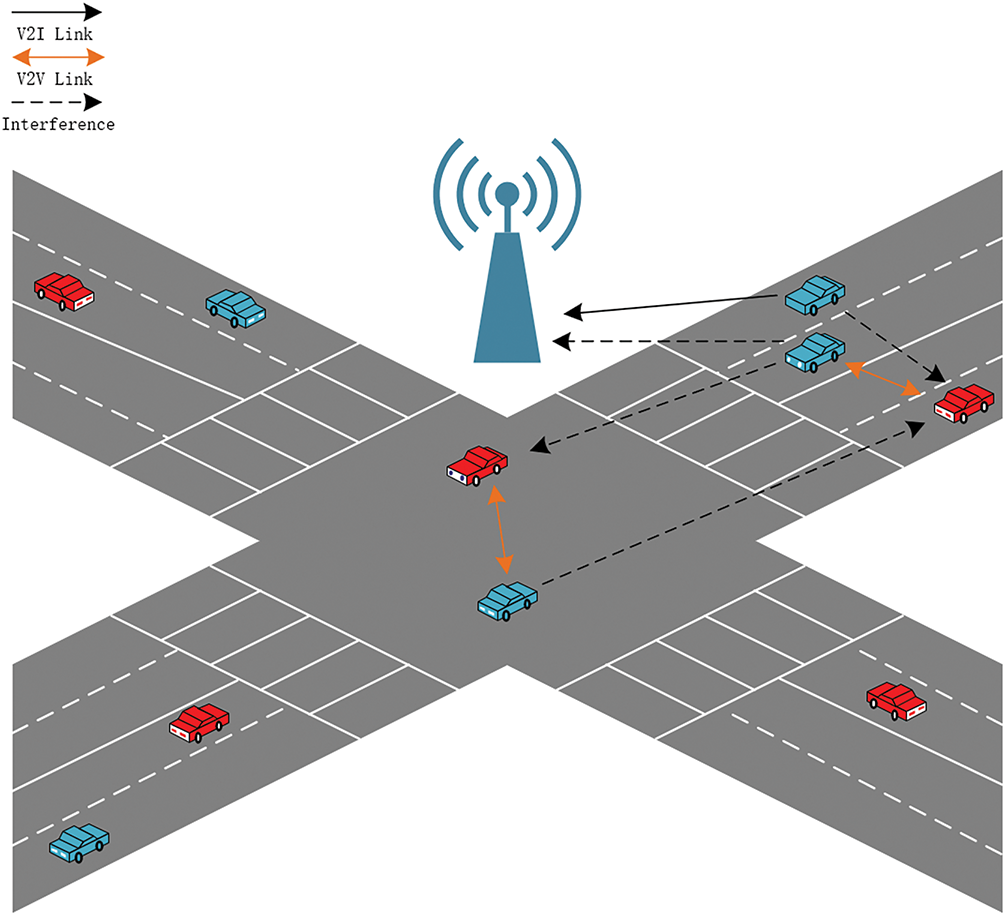
Figure 1: System model
In this model, resource allocation is divided into channel selection and power level selection. The efficient use of channel resources is key to maximizing system efficiency, as congestion on some channels can lead to underutilization of others. Vehicles, when selecting channels, must consider not only their own communication needs but also the potential impact on other vehicles, especially in cases where the available channel is limited. Power level selection follows channel selection and is crucial for balancing the trade-off between minimizing interference and ensuring reliable communication. Lower transmission power reduces interference but can cause signal failure, whereas higher power increases interference and energy consumption.
The system employs a decentralized approach for V2X resource allocation, assuming that V2I resources are allocated by the BS, and the number of subchannels and power levels is predefined [14]. Vehicles make their own decisions regarding resource allocation, with each V2V link having multiple possible resource choices. The goal is to minimize interference to V2I links while meeting latency and reliability requirements for V2V communication, thereby optimizing the overall system performance [15].
To achieve this, the interaction between the model and the environment occurs at two time scales: a larger time scale for determining neighbor relationships and a smaller time scale for gathering local observations and neighbor data. The vehicles process this information through a GNN model to generate low-dimensional feature vectors representing global information. These vectors are then used by DRL to make decisions about channel and power level selections.
2.2 Interference Calculation Method
We assume there are
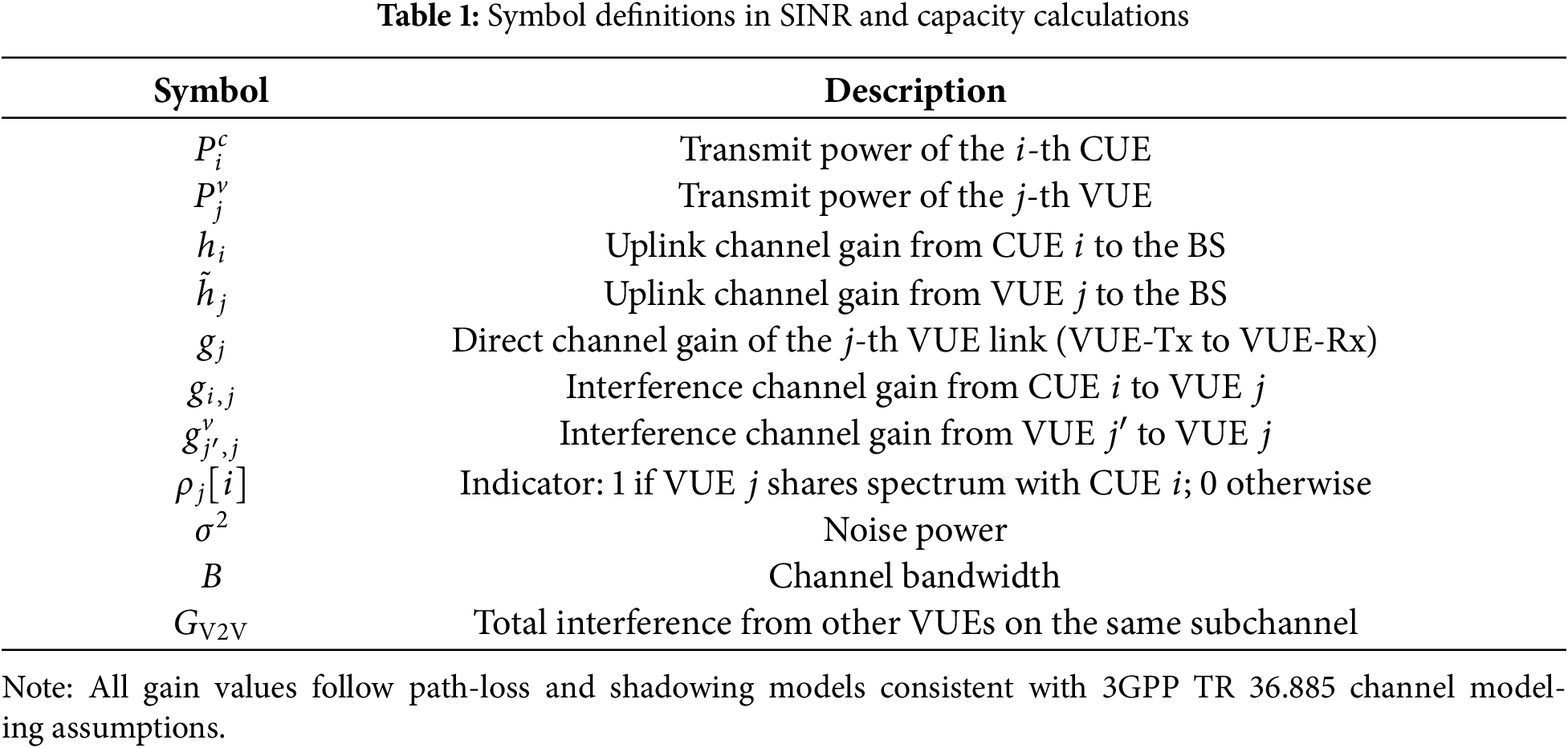
The Signal-to-Interference-plus-Noise Ratio (SINR) for the
Based on Shannon’s capacity formula, the achievable communication rates for the
All related symbols used in the above equations are summarized in Table 1.
3.1 Neighbor Sampling and Graph Construction
In V2X networks, the dynamic nature of vehicle movement and interference makes efficient graph construction essential for real-time resource allocation. Traditional approaches often use fixed neighbor sampling or model the network as a complete graph, which results in excessive complexity and decision latency in high-density environments.
To address this, we propose an adaptive neighbor sampling method that evaluates the importance of each neighbor based on two factors: interference level and distance to the BS. Let
where
Each node selects the top five neighbors based on this score. A graph is then constructed where V2V links are nodes and interference relationships form the edges [16]. We apply GAT to aggregate node features efficiently. This adaptive approach limits graph size, preserves critical interference relationships, and supports scalable learning in dense vehicular scenarios.
Since we assumed there are
The aggregation function of the GAT introduces a self-attention mechanism, assigning a weight to each neighboring node. This weight reflects the influence of the neighbor on the information propagation to the target node; the larger the weight, the stronger the influence of the neighbor. Unlike conventional graph convolution methods, GAT enables each node to dynamically compute attention weights based on neighbor features, thereby facilitating structure-aware and adaptive feature aggregation.
For each node
For node
where
The attention coefficient
Here,
With the attention weight
In this manner, the node
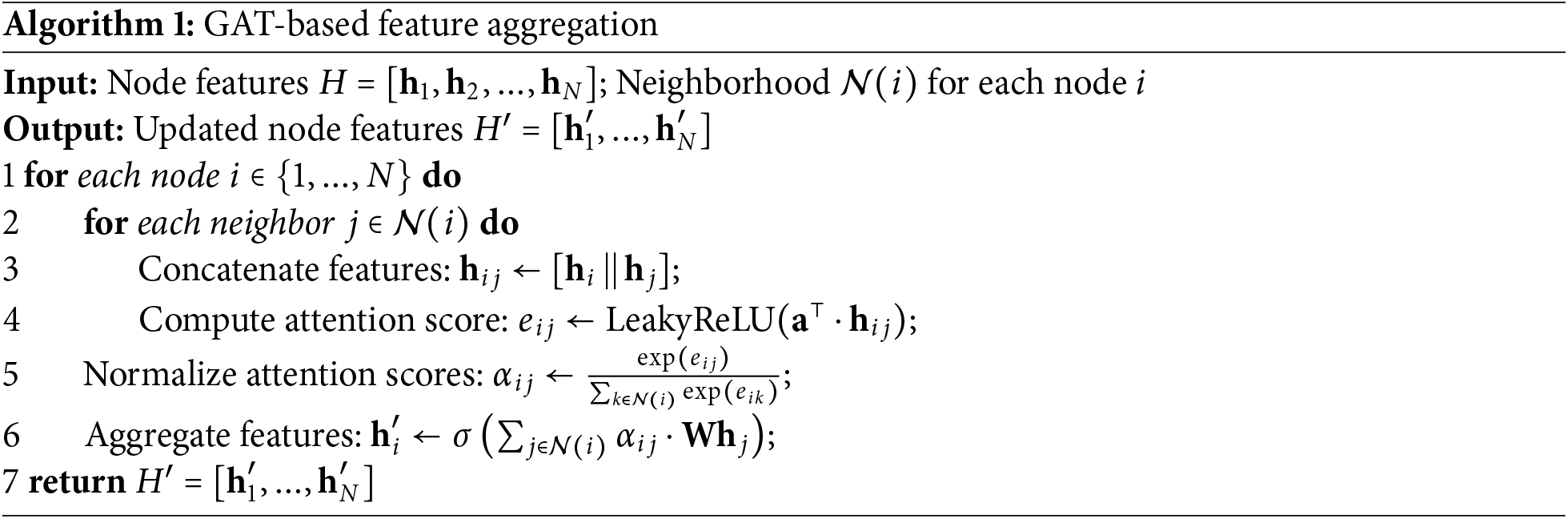
The GAT enhances node relationship capture by assigning personalized weights to neighboring nodes, effectively modeling complex dependencies in vehicular networks [17]. This approach improves resource allocation accuracy by prioritizing reliable links with good channel quality and high communication success rates, optimizing network performance. GAT adapts to dynamic environmental changes by adjusting weights in real-time, ensuring continuous and effective resource allocation. Furthermore, we adopt the LeakyReLU activation function in the GAT aggregation process to address the issue of vanishing gradients and neuron inactivity commonly associated with ReLU. LeakyReLU allows a small, non-zero gradient for negative input values, which helps maintain learning dynamics and stabilizes the training process. This choice follows the original GAT design and has been shown to improve convergence speed and model robustness in dynamic graph environments [18].
3.3 Real-Time Deployment Considerations of GAT Aggregation
While the GAT enables dynamic and personalized feature aggregation by assigning learnable weights to neighboring nodes, its real-time deployment raises concerns regarding computational complexity, particularly in high-density vehicular networks. In each GAT layer, attention weights are computed for every pair of neighboring nodes, leading to a time complexity of O(E) per layer, where E denotes the number of edges. In scenarios with N nodes and average degree D, this translates to approximately O(N
1. Incomplete Graph Construction: By limiting each node to at most 5 neighbors through importance-based sampling, the number of edges per node remains bounded, thereby capping the attention computation cost.
2. Parallelization: The GAT computation is implemented using TensorFlow’s parallelized matrix operations, which enables real-time inference within 30 ms per decision round in a simulated environment with 100 vehicles. GAT introduces additional overhead compared to traditional graph convolutions, our design ensures bounded graph size and efficient computation, making it suitable for time-constrained vehicular applications. Since each node maintains a fixed number of neighbors, the total graph complexity increases linearly with the number of vehicles, making the framework structurally scalable to higher-density scenarios without incurring exponential computational growth. Therefore, the proposed approach is also feasible for deployment on modern edge computing devices, which typically have limited computational resources but demand real-time performance.
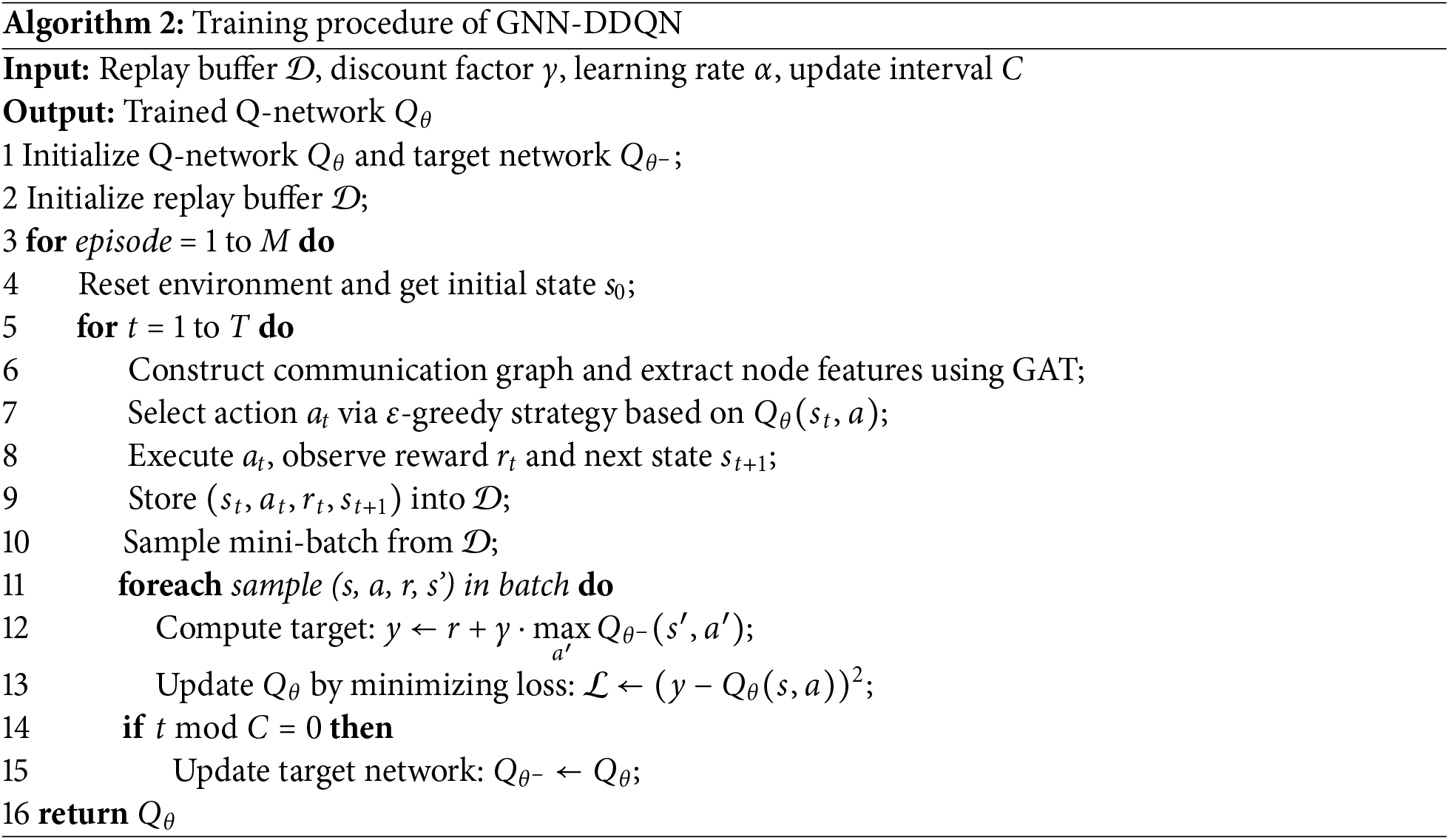
4 The GNN-DDQN Model For Resource Allocation Problems
DRL combines deep learning and reinforcement learning to enable an agent to learn from its interactions with the environment by optimizing cumulative rewards, treating learning as a heuristic evaluation process [19]. Problems are typically modeled as Markov Decision Processes (MDPs), where the agent observes the state, makes decisions based on a policy, executes actions, and receives rewards that update the state [20]. However, the Deep Q-Network (DQN) suffers from an overestimation bias due to using the same network for both action selection and evaluation, which can degrade learning stability and performance. To mitigate this issue, the DDQN was introduced as an enhanced variant of the original DQN. By decoupling the action selection and value estimation processes, DDQN effectively mitigates the overestimation problem and achieves better performance, particularly in vehicular networks.
Next, we will sequentially introduce the details of the state space, action space and reward in the DDQN network.
State Space: for the V2X environment considered in this study, the true state information primarily includes the vehicle’s observations of the environment and the low-dimensional features
Action Space: based on the collected and observed state information, the DDQN network selects an action
and
Reward Function: in the reinforcement learning framework, designing an appropriate reward function is crucial for guiding the agent toward optimal decision-making. In the context of V2X communication resource allocation, our objective is to maximize the V2V link’s ability to meet low latency and high reliability communication requirements while minimizing interference to the V2I link in order to maximize the V2I link’s transmission rate [24]. The reward function is expressed as follows:
where
where
Fig. 2 illustrates the structure of the GNN-DDQN framework, which integrates deep reinforcement learning with graph neural networks for resource allocation in vehicular networks. The overall architecture comprises two main modules: the DDQN and the GNN. The DDQN model utilizes a three-layer neural network with 500, 250, and 120 neurons in each layer, respectively. This network structure was chosen based on empirical tuning to balance model complexity and training performance. The initial learning rate is 0.01, and a
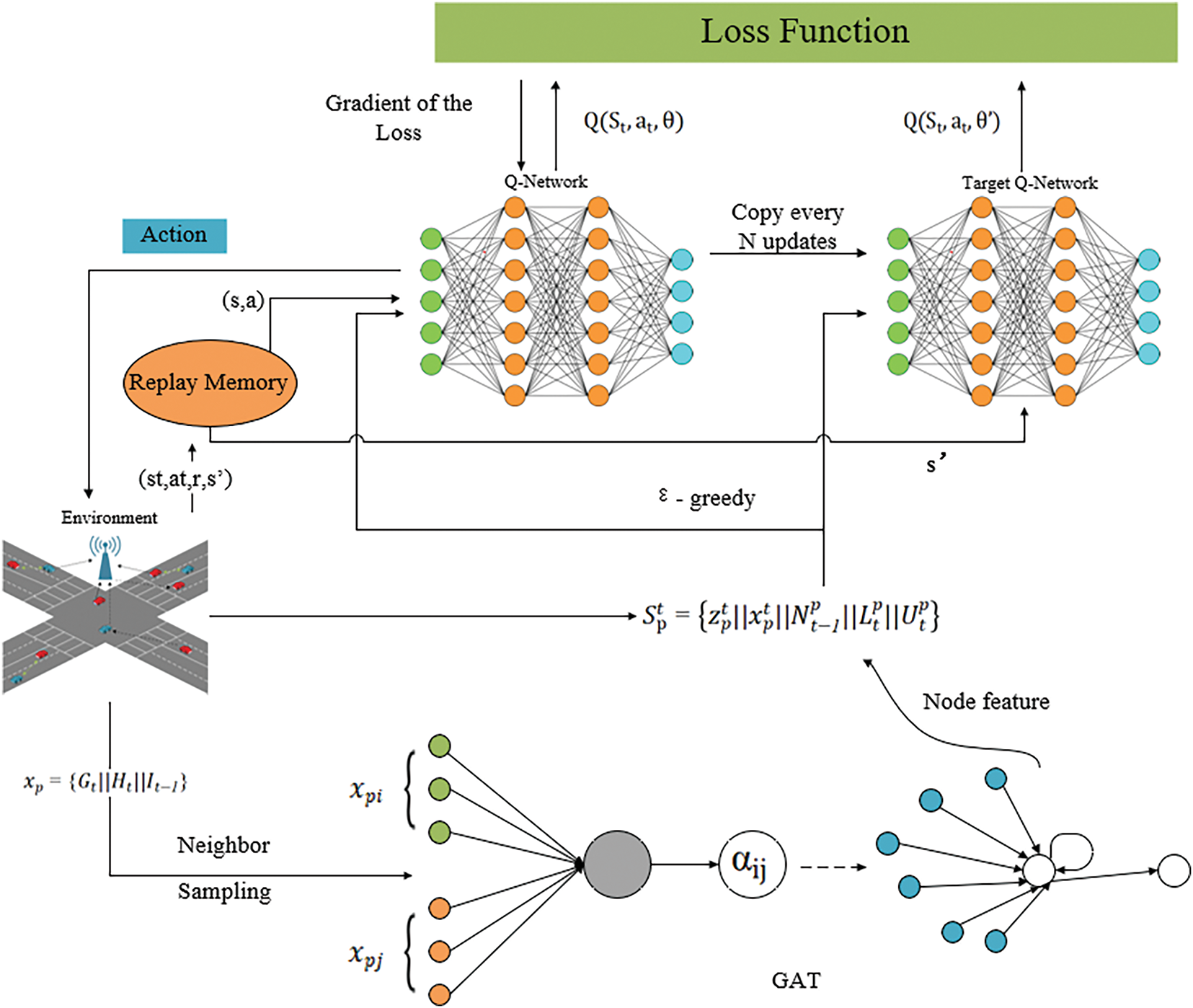
Figure 2: The structure of GNN-DDQN
The GNN module operates in two steps: constructing a graph that captures the global network topology and extracting low-dimensional feature embeddings that represent global information [26]. These embeddings, combined with local observations such as channel state and interference data, enhance the agent’s decision-making process. A replay memory module stores experience tuples
This integrated structure, which combines global context awareness with temporal decision-making, enables adaptive and efficient resource allocation in high-density vehicular networks.
In this section, we present simulation setup and simulation results to show the performance of the proposed GNN-DDQN based resource allocation framework in terms of computational complexity, latency, and resource utilization efficiency, and compare it with other methods.
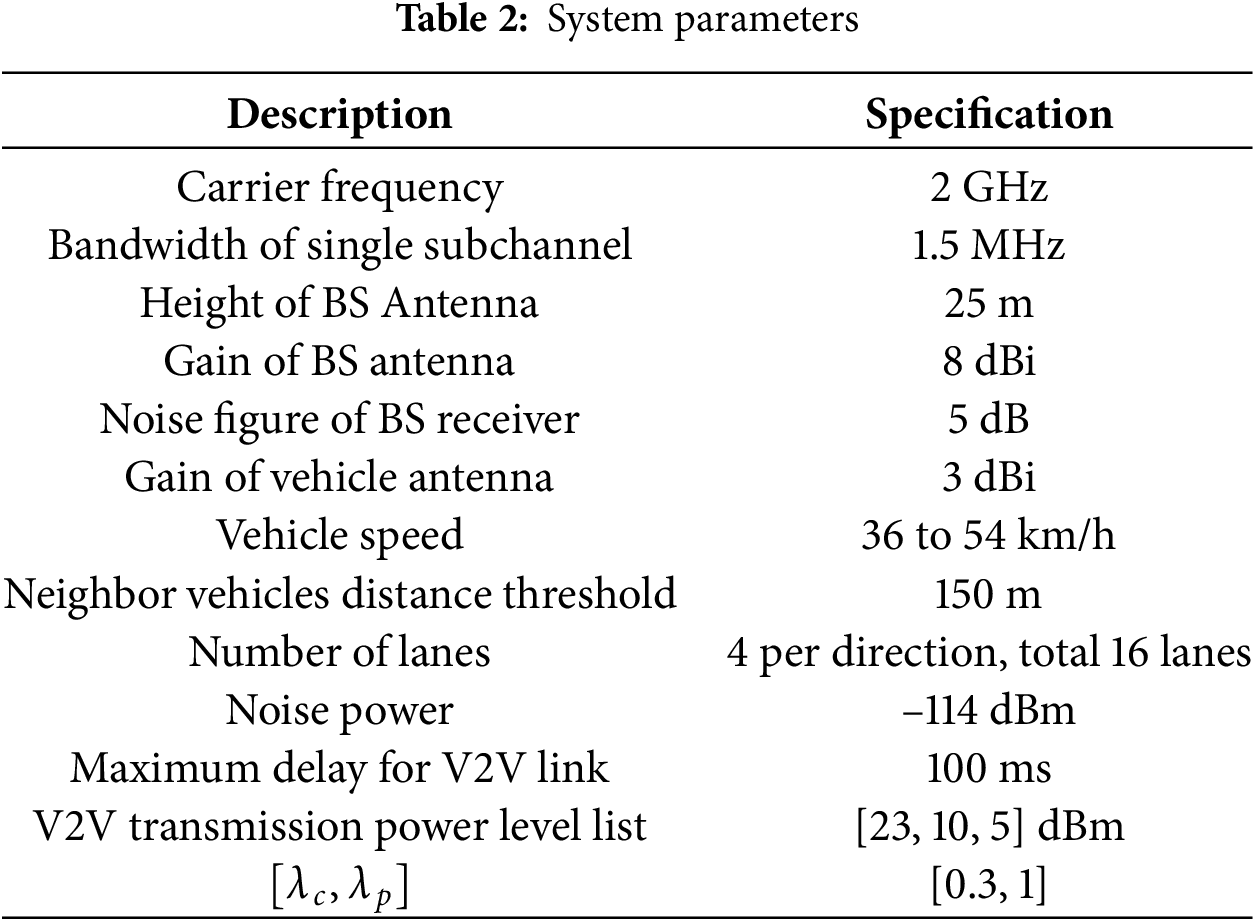
In this study, the code is configured using Python 3.6.13 and TensorFlow 2.3.1. We consider a single-cell system with a carrier frequency of 2 GHz. The simulation follows the Manhattan scenario setup described in 3GPP TR 36.885 [27], which includes 9 blocks and employs both line-of-sight (LOS) and non-line-of-sight (NLOS) channels. More detailed parameter settings are provided in Table 2. The parameters such as “Carrier frequency”, “Bandwidth of single subchannel”, “Height of BS Antenna”, and others are adapted from [28].
Vehicle positions are initialized according to a spatial Poisson process, and their movements follow random waypoint mobility across a 9-block urban grid. Speeds are randomly chosen within the range of 36–54 km/h, consistent with typical city driving. Although no real traffic datasets were used directly, we validated the simulation parameters by comparing with characteristics from benchmark traffic datasets such as TAPAS Cologne and the Luxembourg SUMO dataset. These comparisons ensured that our synthetic setup reflects realistic vehicle density, spacing, and mobility patterns commonly observed in urban environments. The modular design of the proposed GNN-DDQN framework enables it to adapt to varying urban layouts and traffic conditions. Experimental settings can be adjusted to simulate different topologies and mobility models, indicating the model’s potential generalization capability across diverse city scenarios.
Building on this simulation environment, we implement the proposed GNN-DDQN model. A GAT with two layers is used to extract structural features, where each node selects up to five neighbors based on an adaptive importance score. The node input feature is 60-dimensional, including channel gain, subchannel gain, and past interference. The GAT outputs a 20-dimensional embedding through attention-weighted aggregation. This embedding, combined with auxiliary features such as remaining transmission time and neighbor activity, forms a 102-dimensional input to a three-layer DDQN network. The network outputs Q-values for 60 discrete subchannel-power actions using the activation function.
Fig. 3 shows how the number of selected neighbors affects the average scaled reward in the GNN-DDQN framework. As the number increases from 1 to 5, the reward improves steadily and peaks at 5 neighbors, suggesting that aggregating information from a moderate set of nearby nodes helps enhance decision-making. Beyond this point, performance declines, likely due to added noise from less relevant neighbors. This highlights the need to choose a suitable neighbor count that balances useful information and noise in dynamic vehicular environments.
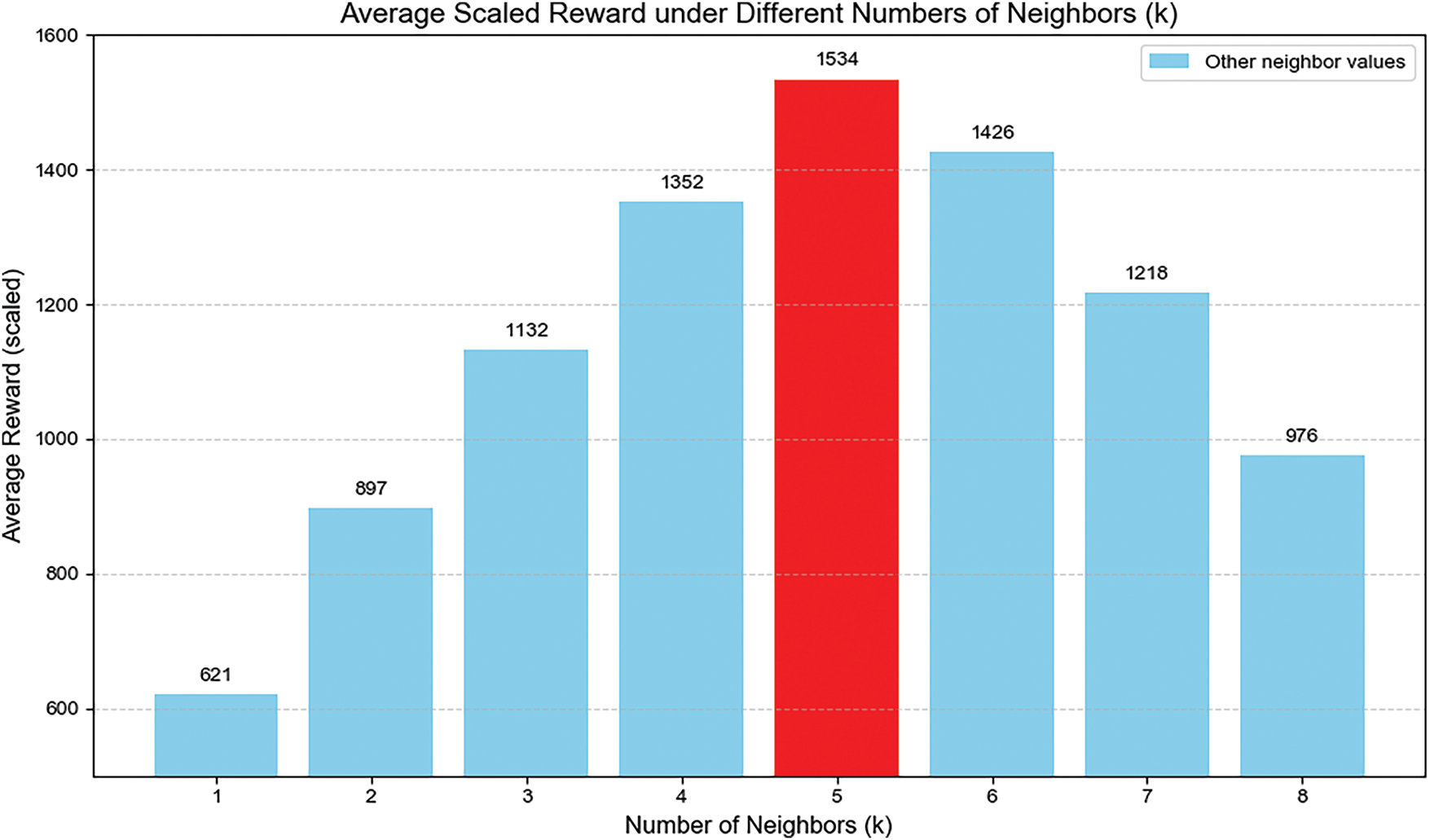
Figure 3: Decision time comparison between complete graph and incomplete graph
Fig. 4 demonstrates the performance of the GNN-DDQN network at different training iterations in a simulated environment. It can be seen that as the number of training iterations increases, the V2I communication rate and the average V2V communication success rate gradually improve and eventually converge. This validates that the model’s performance is continuously optimized during the training process, reflecting the positive impact of training on enhancing communication effectiveness.
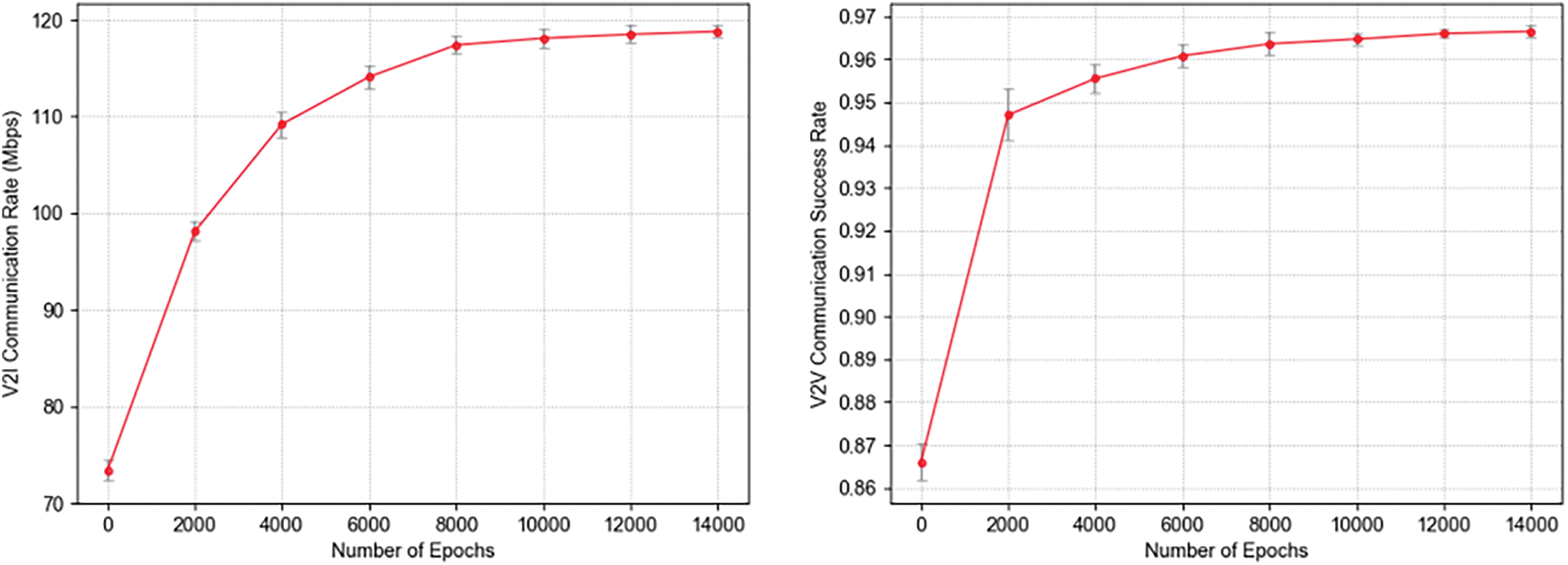
Figure 4: Training effect of V2I communication rate and training effect of V2V communication success rate
Fig. 5 illustrates the impact of increasing vehicle numbers on the average V2I throughput and V2V communication success rate under different resource allocation strategies. As the number of participating vehicles increases, all schemes exhibit a decline in V2I throughput due to intensified interference from V2V links. Simultaneously, V2V communication reliability also decreases as a result of growing channel contention and congestion. Despite these challenges, the proposed GNN-DDQN method significantly outperforms other approaches in both metrics. Across all vehicle densities, GNN-DDQN improves V2I throughput by 22.1% over DQN and by 149.6% over the random baseline. In the high-density scenario with 120 vehicles, it outperforms the four benchmark methods by 310.43%, 36.37%, 34.97%, and 8.81%, respectively. Regarding V2V communication, GNN-DDQN consistently maintains a higher success rate across all densities, with improvements of up to 0.96% over DQN and 9.78% over the random scheme. Under high-density conditions, it achieves V2V reliability gains of 19.53%, 2.08%, 1.91%, and 1.20% compared to the four baselines. These results demonstrate the effectiveness of graph-based structural modeling and attention-guided policy learning in enhancing both V2I and V2V communication performance in dense vehicular networks.
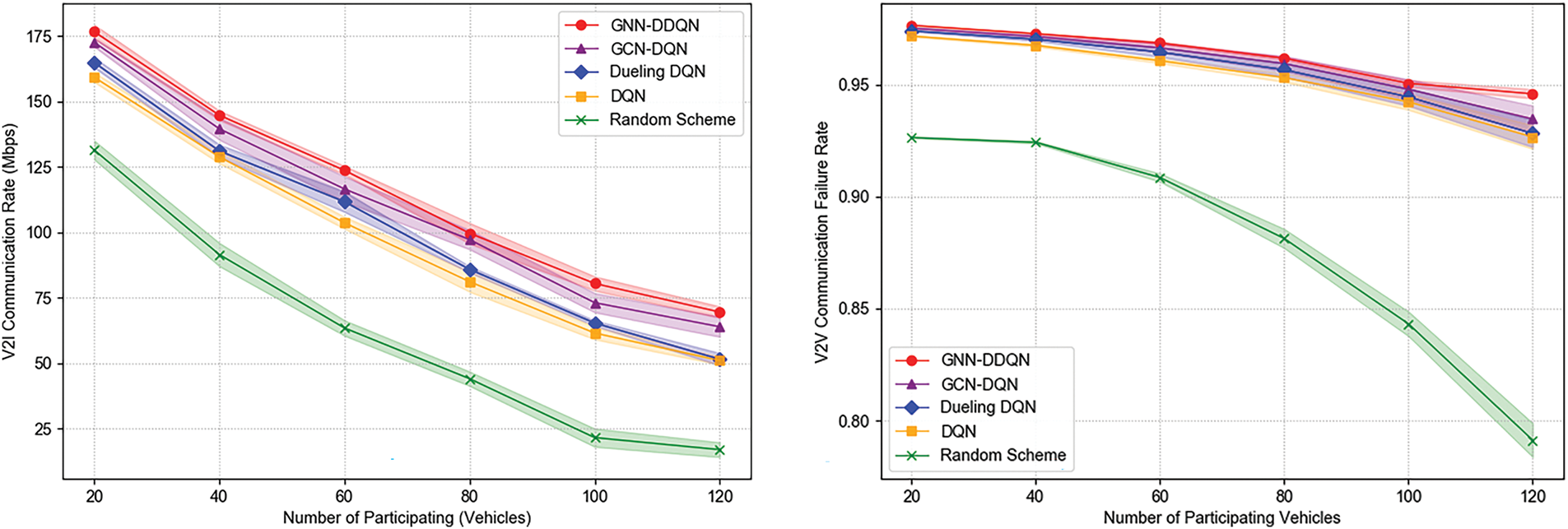
Figure 5: Relationship between number of vehicles and communication performance
Fig. 6 compares the decision-making time when constructing the GNN using a complete graph vs. an incomplete graph, across varying numbers of participating vehicles. As the number of vehicles increases, the decision time under the complete graph configuration rises significantly—from 0.0054 s at 20 vehicles to 0.0078 s at 120 vehicles, representing a 44.44% increase. In contrast, the incomplete graph maintains a relatively stable decision time, fluctuating slightly from 0.0056 to 0.0061 s, with only an 8.93% increase over the same range. At higher vehicle densities, the computational advantage of the incomplete graph becomes more evident. Specifically, at 120 vehicles, the incomplete graph achieves a 21.79% reduction in decision time compared to the complete graph. This stability is primarily attributed to the limited and fixed number of neighbors in the incomplete graph, which avoids the linear growth in computation caused by the increasing number of nodes in the complete graph.
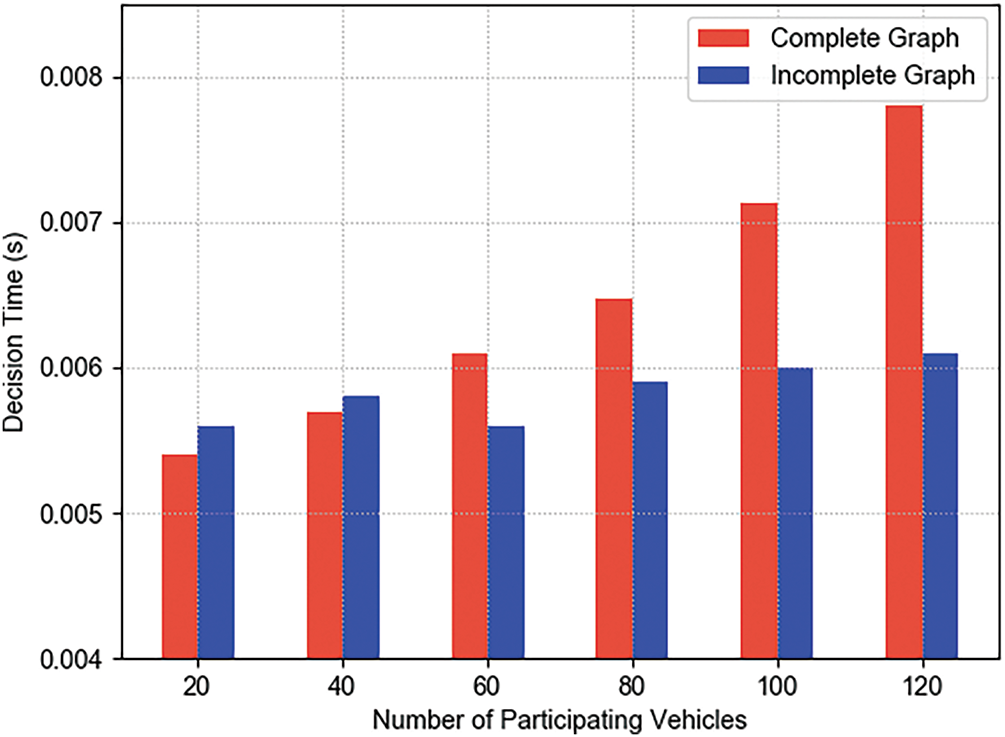
Figure 6: Decision time comparison between complete graph and incomplete graph
Fig. 7 illustrates the average reward per epoch during training for five model configurations: DQN, DDQN, GCN-DQN, GAT-DDQN and the proposed GAT-DQN. The results show that GAT-DDQN achieves the highest reward and most stable convergence, demonstrating the effectiveness of combining graph attention mechanisms with the DDQN framework for improved learning performance in dynamic environments.
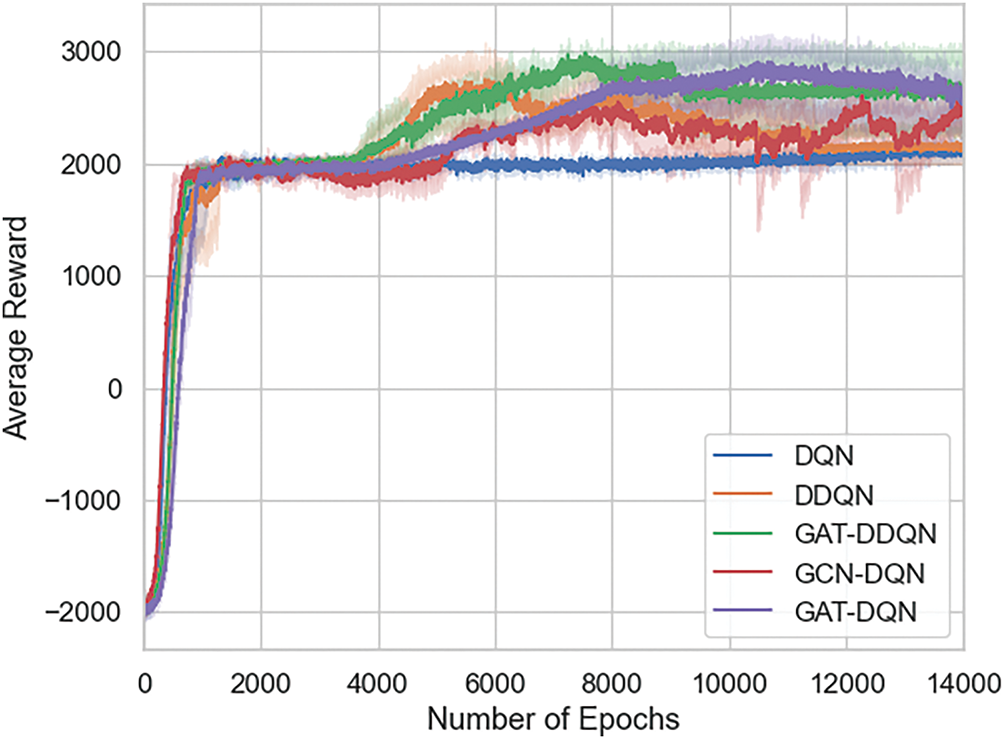
Figure 7: Total reward obtained per epoch during training for different model
In this paper, we integrate Graph Neural Networks (GNN) with Double DDQN for resource allocation in V2X networks. To curb the exponential growth of computation in dense traffic, we introduce an interference- and location-based neighbor sampling method that limits graph size while retaining critical links. We then build dynamic graphs without additional communication overhead and apply a GAT to weight neighbor features via self-attention. Simulation results demonstrate that GNN-DDQN consistently outperforms standalone DQN. Compared to industrial standards such as Qualcomm’s C-V2X solution, our method demonstrates higher flexibility in decentralized V2V communication scenarios and provides better adaptability to dynamic environments due to its learning-based design. Future work will focus on adapting the framework to varying vehicle densities.
While our model addresses channel and power allocation under latency and interference constraints, future work could explore integrated spatio-temporal constraints such as joint vehicle scheduling and trajectory-aware spectrum assignment. Such extensions may benefit from recent progress in multi-agent task routing under capacity and coordination constraints, as investigated in pickup-and-delivery or drone delivery networks. For instance, integrated task assignment and path planning for capacitated multi-agent systems has been shown to offer valuable insights into how spatial-temporal constraints and agent limitations can be jointly optimized [29]. These methodologies could inspire new directions in V2X resource allocation, particularly in scenarios involving mobility prediction, multi-hop relaying, or joint scheduling and routing.
Although the proposed GNN-DDQN framework demonstrates superior performance in simulated high-density vehicular environments, it is important to acknowledge the ethical and safety implications of applying RL in safety-critical V2V communications. The trial-and-error nature of RL may result in suboptimal or unsafe decisions, particularly in early training stages or in highly dynamic, unseen environments. To mitigate these risks, our approach conducts all training in a controlled simulation environment and incorporates latency and reliability constraints directly into the reward function to discourage unsafe behavior. Previous research has shown that properly designed DRL frameworks with safety-aware reward shaping can maintain acceptable QoS levels in vehicular networks [30]. Moreover, the adoption of Graph Neural Networks enhances the model’s generalization ability and reduces the chance of unexpected decisions caused by insufficient observations. In future work, we plan to explore safe RL techniques such as Constrained Policy Optimization and hybrid decision architectures to further enhance reliability, interpretability, and regulatory compliance in real-world deployments. We also recognize that the current model has limitations in handling non-stationary environments and scaling to city-level deployments, which will be important directions for our future research.
Acknowledgement: Not applicable.
Funding Statement: Project ZR2023MF111 supported by Shandong Provincial Natural Science Foundation.
Author Contributions: The authors confirm contribution to the paper as follows: conceptualization, methodology, and writing, Zhengda Huan; supervision and project administration, Jian Sun; validation and data curation, Zeyu Chen and Ziyi Zhang; formal analysis and visualization, Xiao Sun and Zenghui Xiao. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The source code for this study is available in the Gitee repository at https://gitee.com/huan-zhengda/resource-allocation-for-v2-x-communications (accessed on 11 June 2025).
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Dhinesh Kumar R, Rammohan A. Revolutionizing intelligent transportation systems with Cellular Vehicle-to-Everything (C-V2X) technology: current trends, use cases, emerging technologies, standardization bodies, industry analytics and future directions. Veh Commun. 2023;43(8):100638. doi:10.1016/j.vehcom.2023.100638. [Google Scholar] [CrossRef]
2. Guo C, Wang C, Cui L, Zhou Q, Li J. Radio resource management for C-V2X: from a hybrid centralized-distributed scheme to a distributed scheme. IEEE J Sel Areas Commun. 2023;41(4):1023–34. doi:10.1109/JSAC.2023.3242723. [Google Scholar] [CrossRef]
3. Bhadauria S, Shabbir Z, Roth-Mandutz E, Fischer G. QoS based deep reinforcement learning for V2X resource allocation. In: 2020 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom); 2020 May 26–2; Online. p. 1–6. doi:10.1109/BlackSeaCom48709.2020.9234960. [Google Scholar] [CrossRef]
4. Liang L, Ye H, Li GY. Spectrum sharing in vehicular networks based on multi-agent reinforcement learning. IEEE J Sel Areas Commun. 2019;37(10):2282–92. doi:10.1109/JSAC.2019.2933962. [Google Scholar] [CrossRef]
5. Zhang Z, Zhang L, Chen Z. Multi-agent reinforcement learning based channel access scheme for underwater optical wireless communication networks. In: 2021 15th International Symposium on Medica0l Information and Communication Technology (ISMICT); 2021 Apr 14–16; Xiamen, China. p. 65–9. doi:10.1109/ISMICT51748.2021.9434918. [Google Scholar] [CrossRef]
6. Xu Y, Zheng L, Wu X, Tang Y, Liu W, Sun D. Energy-efficient resource allocation for V2X communications. IEEE Internet Things J. 2024;11(18):30014–26. doi:10.1109/JIOT.2024.3410098. [Google Scholar] [CrossRef]
7. Sohaib RM, Onireti O, Sambo Y, Swash R, Imran M. Energy efficient resource allocation framework based on dynamic meta-transfer learning for V2X communications. IEEE Trans Netw Serv Manag. 2024;21(4):4343–56. doi:10.1109/TNSM.2024.3400605. [Google Scholar] [CrossRef]
8. Balkus SV, Wang H, Cornet BD, Mahabal C, Ngo H, Fang H. A survey of collaborative machine learning using 5G vehicular communications. IEEE Commun Surv Tutor. 2022;24(2):1280–303. doi:10.1109/COMST.2022.3149714. [Google Scholar] [CrossRef]
9. Zhang Z, Xu C, Liu K, Xu S, Huang L. A resource optimization scheduling model and algorithm for heterogeneous computing clusters based on GNN and RL. J Supercomput. 2024;80(16):24138–72. doi:10.1007/s11227-024-06383-4. [Google Scholar] [CrossRef]
10. Lee J, Cheng Y, Niyato D, Guan YL, González D. Intelligent resource allocation in joint radar-communication with graph neural networks. IEEE Trans Veh Technol. 2022;71(10):11120–35. doi:10.1109/TVT.2022.3187377. [Google Scholar] [CrossRef]
11. He C, Lu Y, Ai B, Dobre OA, Ding Z, Niyato D. ICGNN: graph neural network enabled scalable beamforming for MISO interference channels. IEEE Trans Mob Comput. 2025:1–13. doi:10.1109/TMC.2025.3570648. [Google Scholar] [CrossRef]
12. Abliz P, Ying S. Underestimation estimators to Q-learning. Inf Sci. 2022;607(3–4):173–85. doi:10.1016/j.ins.2022.05.090. [Google Scholar] [CrossRef]
13. Shahgholi T, Khamforoosh K, Sheikhahmadi A, Azizi S. Enhancing channel selection in 5G with decentralized federated multi-agent deep reinforcement learning. Comput Knowl Eng. 2024;7(2):1–16. doi:10.22067/cke.2024.88900.1119. [Google Scholar] [CrossRef]
14. Zhang X, Peng M, Yan S, Sun Y. Deep-reinforcement-learning-based mode selection and resource allocation for cellular V2X communications. IEEE Internet Things J. 2020;7(7):6380–91. doi:10.1109/JIOT.2019.2962715. [Google Scholar] [CrossRef]
15. Abbas F, Fan P, Khan Z. A novel low-latency V2V resource allocation scheme based on cellular V2X communications. IEEE Trans Intell Transp Syst. 2018;20(6):2185–97. doi:10.1109/TITS.2018.2865173. [Google Scholar] [CrossRef]
16. Zhou Q, Yang S. Research on graph feature aggregation algorithm based on GCN and GAT. In: 2024 IEEE 6th International Conference on Power, Intelligent Computing and Systems (ICPICS); 2024 Jul 26–28; Shenyang, China. p. 964–70. doi:10.1109/ICPICS62053.2024.10795896. [Google Scholar] [CrossRef]
17. Li H, Dou R, Keil A, Principe JC. A self-learning cognitive architecture exploiting causality from rewards. Neural Netw. 2022;150(1):274–92. doi:10.1016/j.neunet.2022.02.029. [Google Scholar] [PubMed] [CrossRef]
18. Dubey AK, Jain V. Comparative study of convolution neural network’s ReLU and leaky-ReLU activation functions. In: Applications of Computing, Automation and Wireless Systems in Electrical Engineering: Proceedings of MARC 2018; Singapore: Springer; 2019. p. 873–80. doi:10.1007/978-981-13-6772-4_76. [Google Scholar] [CrossRef]
19. Liu S, Pan C, Zhang C, Yang F, Song J. Dynamic spectrum sharing based on deep reinforcement learning in mobile communication systems. Sensors. 2023;23(5):2622. doi:10.3390/s23052622. [Google Scholar] [PubMed] [CrossRef]
20. Alsheikh MA, Hoang DT, Niyato D, Tan HP, Lin S. Markov decision processes with applications in wireless sensor networks: a survey. IEEE Commun Surv Tutor. 2015;17(3):1239–67. doi:10.1109/COMST.2015.2420686. [Google Scholar] [CrossRef]
21. Ji M, Wu Q, Fan P, Cheng N, Chen W, Wang J, et al. Graph neural networks and deep reinforcement learning based resource allocation for V2X communications. IEEE Internet Things J. 2024;12(4):3613–28. doi:10.1109/JIOT.2024.3469547. [Google Scholar] [CrossRef]
22. Ren J, Chai Z, Chen Z. Joint spectrum allocation and power control in vehicular communications based on dueling double DQN. Veh Commun. 2022;38(3):100543. doi:10.1016/j.vehcom.2022.100543. [Google Scholar] [CrossRef]
23. Liu Z, Deng Y. Resource allocation strategy for vehicular communication networks based on multi-agent deep reinforcement learning. Veh Commun. 2025;53(2):100895. doi:10.1016/j.vehcom.2025.100895. [Google Scholar] [CrossRef]
24. Gu X, Zhang G, Ji Y, Duan W, Wen M, Ding Z, et al. Intelligent surface aided D2D-V2X system for low-latency and high-reliability communications. IEEE Trans Veh Technol. 2022;71(11):11624–36. doi:10.1109/TVT.2022.3189627. [Google Scholar] [CrossRef]
25. Liu P, Cui H, Zhang N. DDQN-based centralized spectrum allocation and distributed power control for V2X communications. IEEE Trans Veh Technol. 2025;74(3):4408–18. doi:10.1109/TVT.2024.3493137. [Google Scholar] [CrossRef]
26. Zhou J, Liu L, Wei W, Fan J. Network representation learning: from preprocessing, feature extraction to node embedding. ACM Comput Surv. 2022;55(2):1–35. doi:10.1145/3491206. [Google Scholar] [CrossRef]
27. 3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA); Further Advancements for E-UTRA Physical Layer Aspects (Release 9). [Internet]. [cited 2025 Jun 11]. Available from: https://api.semanticscholar.org/CorpusID:16652630. [Google Scholar]
28. Ye H, Li GY, Juang B-HF. Deep reinforcement learning based resource allocation for V2V communications. IEEE Trans Veh Technol. 2019;68(4):3163–73. doi:10.1109/TVT.2019.2897134. [Google Scholar] [CrossRef]
29. Chen Z, Alonso-Mora J, Bai X, Harabor DD, Stuckey PJ. Integrated task assignment and path planning for capacitated multi-agent pickup and delivery. IEEE Robot Autom Lett. 2021;6(3):5816–23. doi:10.1109/LRA.2021.3074883. [Google Scholar] [CrossRef]
30. Qu N, Wang C, Li Z, Liu F, Ji Y. A distributed multi-agent deep reinforcement learning-aided transmission design for dynamic vehicular communication networks. IEEE Trans Veh Technol. 2023;73(3):3850–62. doi:10.1109/TVT.2023.3326877. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools