
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

A Deep Reinforcement Learning with Gumbel Distribution Approach for Contention Window Optimization in IEEE 802.11 Networks
Department of Electrical Engineering, National Taiwan University of Science and Technology, Taipei, 106335, Taiwan
* Corresponding Author: Yi-Wei Ma. Email:
Computers, Materials & Continua 2025, 84(3), 4563-4582. https://doi.org/10.32604/cmc.2025.066899
Received 20 April 2025; Accepted 25 June 2025; Issue published 30 July 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This study introduces the Smart Exponential-Threshold-Linear with Double Deep Q-learning Network (SETL-DDQN) and an extended Gumbel distribution method, designed to optimize the Contention Window (CW) in IEEE 802.11 networks. Unlike conventional Deep Reinforcement Learning (DRL)-based approaches for CW size adjustment, which often suffer from overestimation bias and limited exploration diversity, leading to suboptimal throughput and collision performance. Our framework integrates the Gumbel distribution and extreme value theory to systematically enhance action selection under varying network conditions. First, SETL adopts a DDQN architecture (SETL-DDQN) to improve Q-value estimation accuracy and enhance training stability. Second, we incorporate a Gumbel distribution-driven exploration mechanism, forming SETL-DDQN(Gumbel), which employs the extreme value theory to promote diverse action selection, replacing the conventional -greedy exploration that undergoes early convergence to suboptimal solutions. Both models are evaluated through extensive simulations in static and time-varying IEEE 802.11 network scenarios. The results demonstrate that our approach consistently achieves higher throughput, lower collision rates, and improved adaptability, even under abrupt fluctuations in traffic load and network conditions. In particular, the Gumbel-based mechanism enhances the balance between exploration and exploitation, facilitating faster adaptation to varying congestion levels. These findings position Gumbel-enhanced DRL as an effective and robust solution for CW optimization in wireless networks, offering notable gains in efficiency and reliability over existing methods.Keywords
The exponential growth in connected devices continues to heighten collision risks in wireless networks, motivating extensive research on enhancing network performance. For instance, Ahamad et al. [1] propose dynamic power control schemes to mitigate interference in Device to Device (D2D)-enhanced 5G networks, thereby boosting network performance, while Sivaram et al. [2] integrated Dual Busy Tone Multiple Access (DBTMA) with Contention-aware Admission Control Protocol (CACP) to further enhanced the bandwidth utilization. Likewise, Binzagr et al. [3] propose energy-efficient resource allocation schemes that considerably improve system performance. In IEEE 802.11 (Wi-Fi) networks, reducing collisions is essential for throughput enhancement, and the Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) technique [4] dynamically adjusts the Contention Window (CW) to mitigate initial transmission collisions. Consequently, optimizing CW size is vital to sustaining robust Wi-Fi performance.
Early CW optimization methods have predominantly relied on non-learning-based strategies. For example, Adaptive Contention Window Control (ACWC) [5] employs a single backoff stage while preserving the standard IEEE 802.11 protocol, and Probability-based Opportunity Dynamic Adaptation (PODA) [6] extends the Binary Exponential Backoff (BEB) algorithm by adaptively modifying the CW minimum (
Machine Learning (ML) approaches have gained traction for addressing complex tasks, with Reinforcement Learning (RL) [11] emerging as a robust technique for selecting optimal CW values. Several studies [12–17] have employed Q-learning algorithms to dynamically adjust CW sizes, using observed transmission successes and collisions as feedback to optimize performance. However, the exhaustive exploration of state–action pairs in traditional Q-learning proves computationally demanding, prompting the transition to Deep Q-learning Networks (DQNs) [18], which utilizes Deep Neural Networks (DNNs) for efficient state–action mapping. As a branch of Deep Reinforcement Learning (DRL), DQN exemplifies how deep models enhance policy learning under high-dimensional and dynamic environments. DRL has also been utilized in secure networked systems, including data aggregation in edge-enabled IoT [19] and trust management in 5G vehicular infrastructures [20], demonstrating its flexibility in complex decision-making tasks. Similarly, in the context of IEEE 802.11 networks, DQN-based applications for CW adaptation include drone networks [21], centralized schemes like the Centralized Contention Window Optimization with the DQN model (CCOD-DQN) [22], and methods incorporating additional performance metrics [23,24]. More recently, integration of the SETL mechanism with the DQN framework [25,26] has been proposed for
Grounded in Van Hasselt et al. [27], Double DQN (DDQN) reduces overestimation bias by decoupling action selection from value estimation, using an online network for action selection and a target network for stable Q-value updates. Asaf et al. [28] extend this concept to the DRL-based Contention Window Optimization (DCWO) method, a DDQN-based improvement of CCOD-DQN [22]. Yet, DCWO-DDQN continues to rely on the classic CSMA/CA process [4] and frequently expands CW to its maximum (
The Gumbel distribution has proven effective in many fields for modeling rare and extreme events. In transportation [30], it improves predictions of unpredictable pedestrian movements. In healthcare [31], it handles asymmetric and extreme medical data better than traditional models. For communication systems [32], it captures rare signal fades to boost reliability, supports smart node selection under constraints [33], and models delays in energy-harvesting systems [34]. These successes highlight Gumbel’s advantage in various scenarios, supporting its use in our SETL-DDQN(Gumbel) design. To the best of our knowledge, this is the first work to incorporate a Gumbel distribution method into DRL for CW optimization under IEEE 802.11 network scenarios. This unified design mitigates overestimation and selection bias while reinforcing the model’s adaptability in congested or uncertain network conditions, ultimately driving substantial improvements in overall network performance.
To summarize, this study presents three main contributions: (i) We propose SETL-DDQN, a threshold-based CW control scheme integrated DDQN model for decoupling action selection from value estimation to reduce the overestimation bias error. This approach enables scalable and adaptive CW optimization across diverse IEEE 802.11 topologies, reducing packet delays and stabilizing throughput. (ii) We further introduce SETL-DDQN(Gumbel), a Gumbel distribution integrated to SETL-DDQN that leverages an extreme value theory [29] to capture distributed stochastic action space exploration via Gumbel-Softmax technique, leading to more robust and high-impact CW decisions in dense scenarios. (iii) Comprehensive simulations in both static and time-varying IEEE 802.11 scenarios show that SETL-DDQN and SETL-DDQN(Gumbel) outperform existing methods—including the IEEE 802.11 standard [4], SETL [10], CCOD-DQN [22], SETL-DQN [25], SETL-DQN(MA) [26], and DCWO-DDQN [28]—by delivering higher throughput, lower collision rates, and superior adaptability to various network conditions.
2.1 The Q-Learning for CW Optimization
Q-learning approaches have been widely investigated to optimize CW parameters and enhance throughput in IEEE 802.11 networks. Kim & Hwang [12] propose a Q-learning algorithm where Stations (STAs) select backoff values that maximize transmission success probability, while Zerguine et al. [13] employ Q-learning in Mobile Ad-hoc Networks (MANETs), adjusting CW based on the cumulative success transmissions and collisions. Kwon et al. [14] apply Q-learning in Wireless Body Area Networks (WBANs) by leveraging Acknowledgment (ACK) feedback for improved reliability. Pan et al. [15] jointly optimize CW and Transmission Opportunity (TxOP) to increase throughput, and Lee et al. [16] introduce a Frame Size Control (FSC) mechanism to address the throughput drop at high node densities. Zheng et al. [17] further refine the learning process via
2.2 The DQN-Based Approaches for Scalable CW Adaptation
To overcome Q-learning’s high computational overhead, DQNs have been implemented for CW adaptation in network with high STAs density and dynamic traffic scenarios. Subash & Nithya [21] leverage DQN in high-mobility, interference-prone aerial networks to reduce collisions by CW tuning, while Wydmański & Szott [22] propose the CCOD-DQN framework for centralized CW decisions under varying traffic patterns. Sheila de Cássia et al. [23] argument CCOD-DQN with average queue length as an additional observation, and Lei et al. [24] further develop DQN-CSMA/CA to better accommodate dynamic Wi-Fi usage. Ke & Astuti [25,26] integrate the SETL algorithm [10] with DQN for single- and multi-agent
2.3 The DDQN Enhancements and Remaining Gaps
In dense Wi-Fi networks, DQN offers a scalable framework but struggles with Q-value overestimation under noisy conditions, resulting in overly aggressive CW settings that increase collisions and decrease throughput. Asaf et al. [28] introduced DCWO, a DDQN-based enhancement of CCOD-DQN [22] designed to mitigate this bias by decoupling action selection from value estimation. However, DCWO remains bound to the conventional CSMA/CA mechanism [4] and frequently adjusts the CW to its
In response, we present SETL-DDQN and SETL-DDQN(Gumbel) for CW optimization in dense Wi-Fi environments. SETL-DDQN integrates a threshold-based CW adjustment within the DDQN framework to enable rapid adaptation. Recognizing the non-linear and highly variable characteristic of wireless channels, we note that the standard
Our decision to use the Gumbel distribution in DRL is supported by its proven success in various fields for modeling uncertainty and extreme events. Astuti et al. [30] applied a Gumbel-based Transformer network to capture sudden and discrete changes in pedestrian and cyclist trajectories. Daud et al. [31] introduced an extended Gumbel model to represent asymmetric and heavy-tailed distributions in biomedical data. Mehrnia & Coleri [32] used extreme value theory with Gumbel-related modeling to describe rare fading events in wireless systems. Strypsteen & Bertrand [33] incorporated Conditional Gumbel-Softmax for selecting features and nodes under constraints in sensor networks. Miridakis et al. [34] modeled the extreme Age of Information (AoI) in energy-harvesting systems using the Gumbel distribution to enable analytical characterizations. These studies demonstrate that the Gumbel distribution is a flexible and reliable tool for capturing irregular, high-impact behaviors. Based on this, our SETL-DDQN(Gumbel) incorporates Gumbel-Softmax sampling via extreme value theory to improve exploration under static and time-varying Wi-Fi network conditions.
3 Applying DRL to IEEE 802.11 Networks
We consider an IEEE 802.11 network comprising a single Access Point (AP) and a set of
In this study, we employ a threshold-based CW approach [10], where a fixed
To further optimize CW adaptation, we develop our SETL-DDQN and SETL-DDQN(Gumbel) frameworks in a centralized, single-agent configuration at the AP. The AP collects collision and throughput metrics from the STAs (via management frames or feedback), aggregates these into a global CW configuration, and periodically broadcasts the updated
To address the decision-making process within a partially observable wireless environment, we formulate our DRL-based CW optimization as a POMDP [35]. The framework is characterized by the tuple {
Here,
The action set
where
The transition probability
The observable quantity
where
Given the partial observability of the environment,
The discount coefficient
Finally, the reward function
As detailed above, Fig. 1 illustrates the uplink transmission process, where STAs transmit packets to the AP while the centralized agent dynamically adjusts the most appropriate
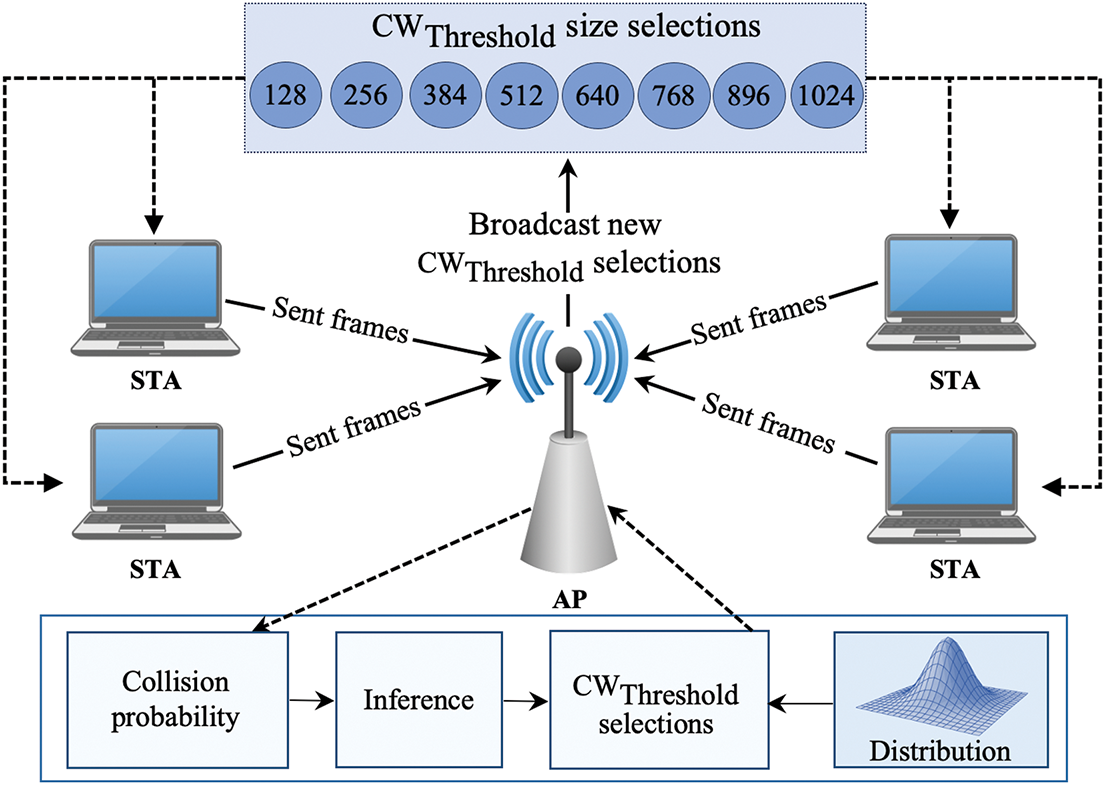
Figure 1: The proposed SETL-DDQN and additional Gumbel distribution frameworks manages STA-initiated data transmission via centralized
4 The Proposed SETL-DDQN and SETL-DDQN(Gumbel) Schemes
In our proposed schemes, the key contribution is to integrate DDQN with a dynamic CW adjustment mechanism, reducing overestimation bias and improving learning stability. We proposed two schemes—SETL-DDQN and SETL-DDQN(Gumbel)—to optimize the
4.1 The DDQN-Based CW Optimization
In the SETL-DDQN architecture, two neural networks are maintained—a primary (online) network with parameters
(1) The DDQN Update Rule: To mitigate overestimation bias common to single network DQN, SETL-DDQN applies the following update:
where
(2) The Loss Function and Experience Replay: We minimize the following loss function to update the parameters
where
(3) The
The interaction between SETL mechanism and DDQN model is illustrated in Fig. 2. The agent begins by observing the network state
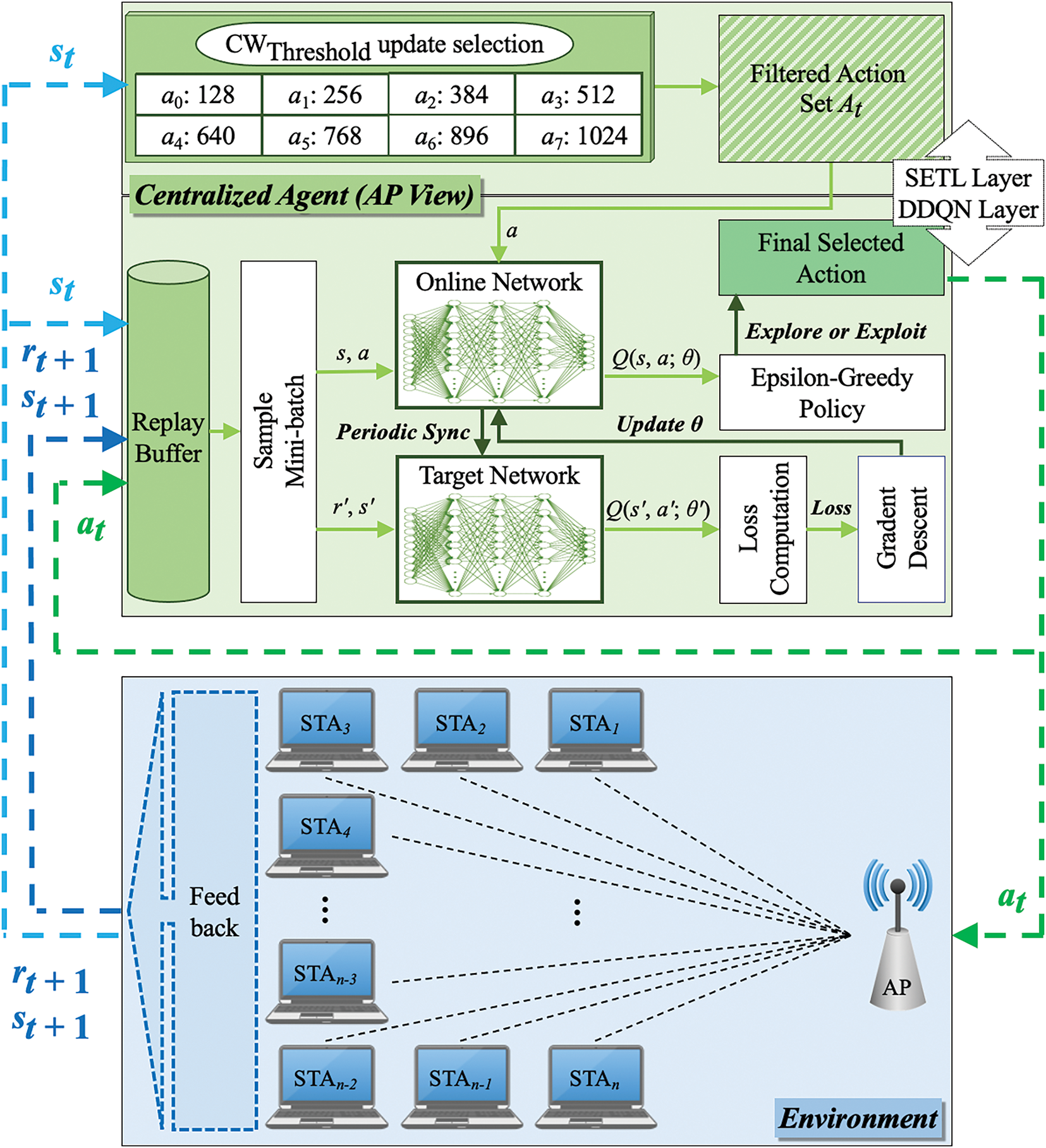
Figure 2: The SETL-DDQN framework is a centralized CW control architecture that integrates a SETL layer with a DDQN layer, enabling efficient and adaptive
However, the
4.2 The Gumbel-Enhanced Exploration via Extreme Value Theory
This study further proposes SETL-DDQN(Gumbel), which leverages extreme value theory by incorporating Gumbel noise for stochastic action sampling, increasing exploration diversity and refining CW optimization under different level of traffic loads.
(1) The Gumbel Noise Generation: To introduce stochasticity that targets extreme rewards, we generate Gumbel noise to capture extreme tail behaviors using inverse transform sampling. Specifically, we first sample
where
(2) The Action Sampling Strategies: Once the noise
The Gumbel-Max Sampling (
This strategy is equal to the classical Gumbel trick, often used for sampling from categorical distributions, and supports non-uniform but deterministic exploration with ε-greedy fallback.
The Gumbel-Softmax Sampling (
where
The Top-k Gumbel Sampling (
This variant ensures that exploration focuses only on a limited set of high-value actions, reducing variance while still escaping local optimal.
The Boltzmann-Gumbel Sampling (
This method promotes actions with low visitation frequency and gradually anneals exploration as learning progresses.
By sampling
(3) The Gumbel Distribution Cumulative Distribution Function (CDF): The heavy-tailed characteristic of the Gumbel distribution is mathematically captured by its Cumulative Distribution Function (CDF), expressed as:
where
The reason for adopting the Gumbel distribution lies in its foundation in extreme value theory [29], particularly its role in modeling the distribution of the maximum of independent and identically distributed (i.i.d.) variables. This property aligns well with our goal of prioritizing high-reward actions in dynamic and stochastic wireless environments. In such settings, where contention and Q-values change rapidly, exploring extreme outcomes is important. Compared to other distributions such as Fréchet and Weibull [37], the Gumbel distribution presents two critical advantages. First, it has full support over the real line (
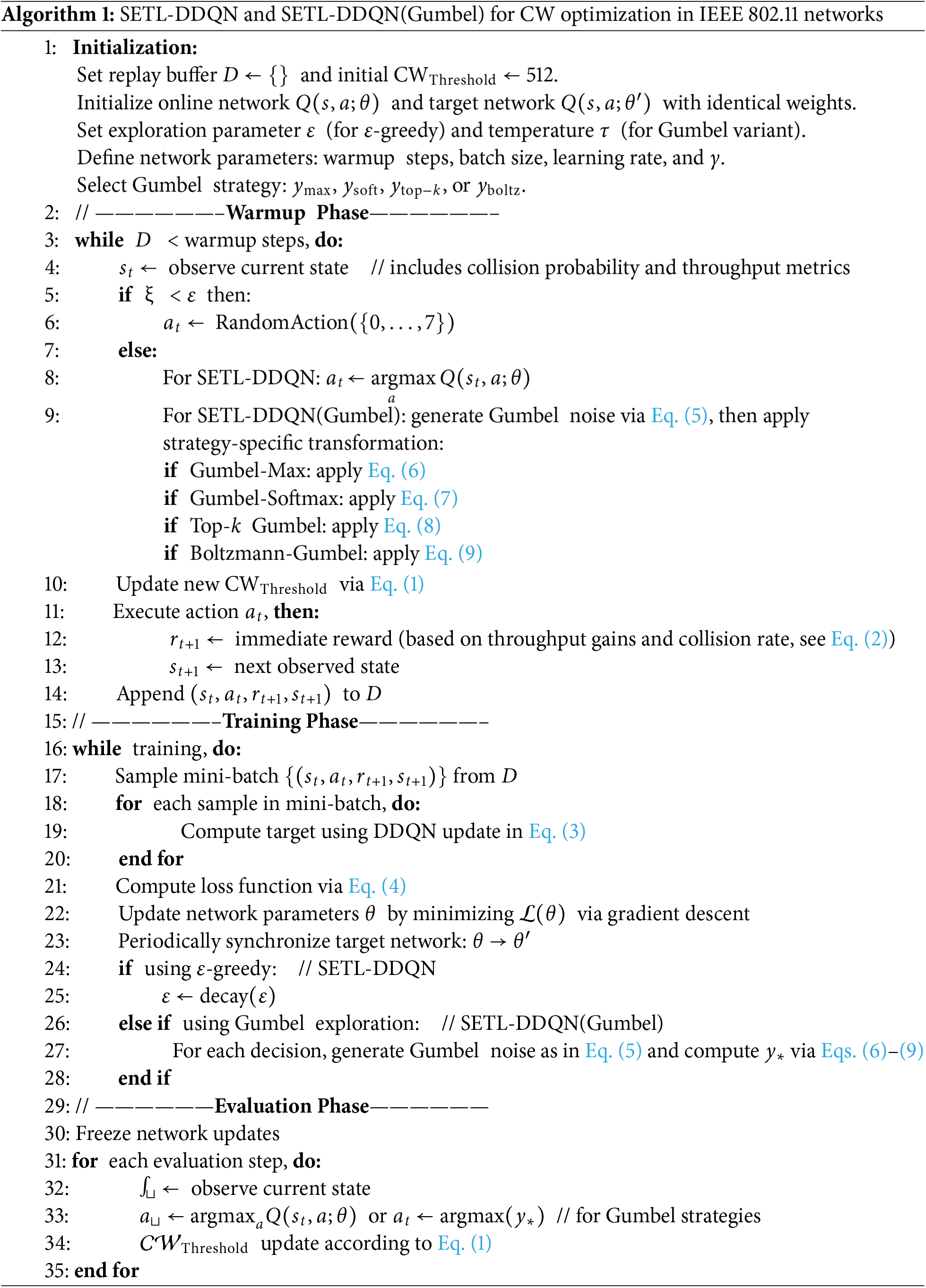
As outlined in Algorithm 1, the proposed SETL-DDQN and SETL-DDQN(Gumbel) frameworks proceed through three stages: Warmup, Training, and Evaluation. During Warmup Phase, the replay buffer
4.4 The Computational Complexity Analysis
The overall computational complexity of the proposed SETL-DDQN and SETL-DDQN(Gumbel) schemes is dominated by the forward pass through the neural network and subsequent action selection. For both schemes, a single forward pass over the Q-network requires
5.1 The Implementation Details
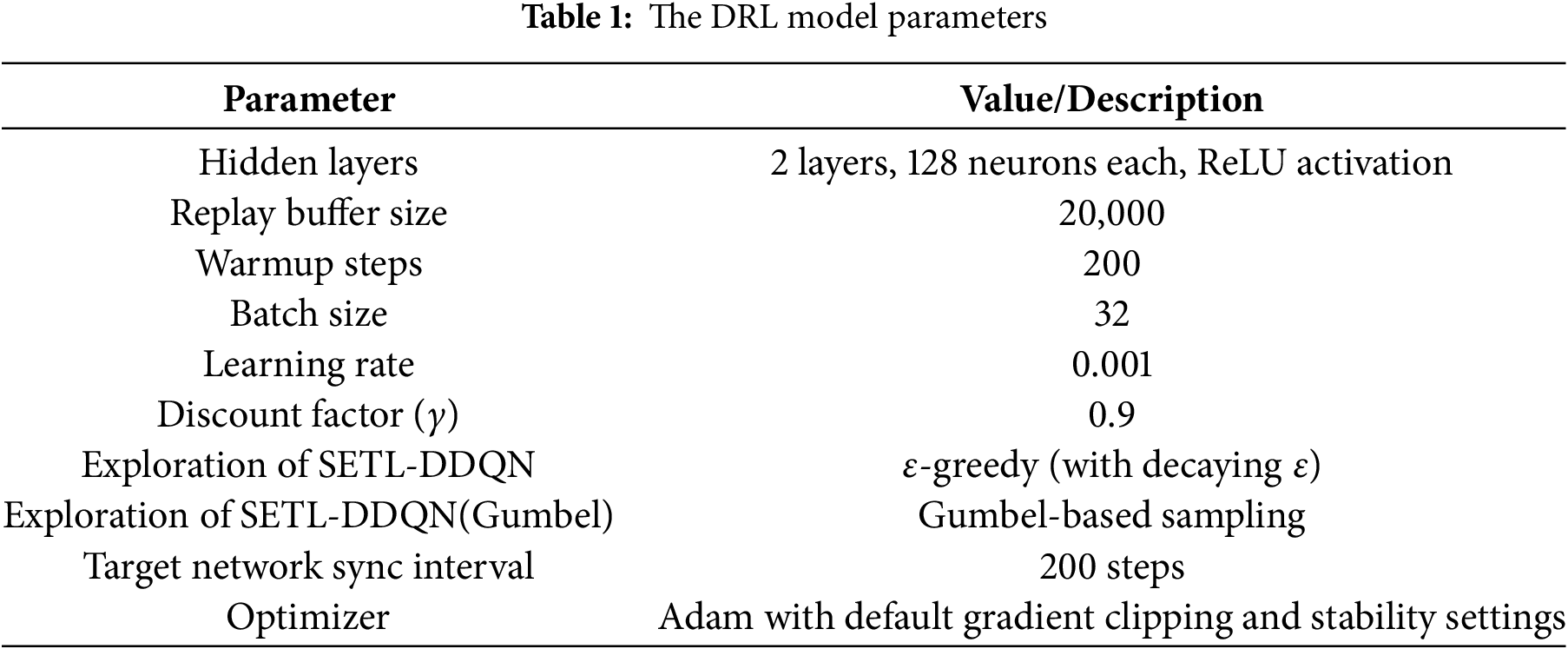
We implement the DRL models using a feed-forward architecture with two hidden layers (128 neurons each) activated by ReLU, and a linear output layer mapping to eight discrete
The System-Level Considerations. To ensure practical deployability, we design the agent to rely only on lightweight local metrics—namely, collision probability and instantaneous throughput—for decision-making. These statistics are efficiently derived from MAC-layer feedback (ACK/NACK signals and channel occupancy) and are updated periodically at the episode level (every 1–2 s), thus incurring minimal overhead from centralized control. To assess operational efficiency, we measure the forward inference time of the trained model on an Intel Core i9-14900K CPU, which averages 0.38 ms per decision. This latency is well below the typical CW adjustment interval within (~100 ms), ensuring that decision-making remains efficient relative to network conditions and does not slow down policy evaluation.
Fig. 3 presents a comparison of three DRL-based CW adaptation models—DQN, attention-DQN, DDQN, and DDQN(Gumbel)—across four metrics that assess accuracy, stability, and robustness. The attention-DQN extends DQN by adding a Squeeze-and-Excitation (SE) module [38], which helps the agent focus on key traffic features and reduce irrelevant signals. Panel (a) displays training loss under a static STA scenario, highlighting long-term learning consistency in a fixed environment. Panel (b) presents training loss behavior under different traffic distributions, capturing the impact of changing traffic distributions on model stability. Panel (c) reports overestimation bias by comparing predicted and actual Q-values, and Panel (d) plots as the absolute difference between online and target Q-values. While Panels (a), (c), and (d) reflect stability under controlled training conditions, Panel (b) highlights how each model responds when the network load changes over time.
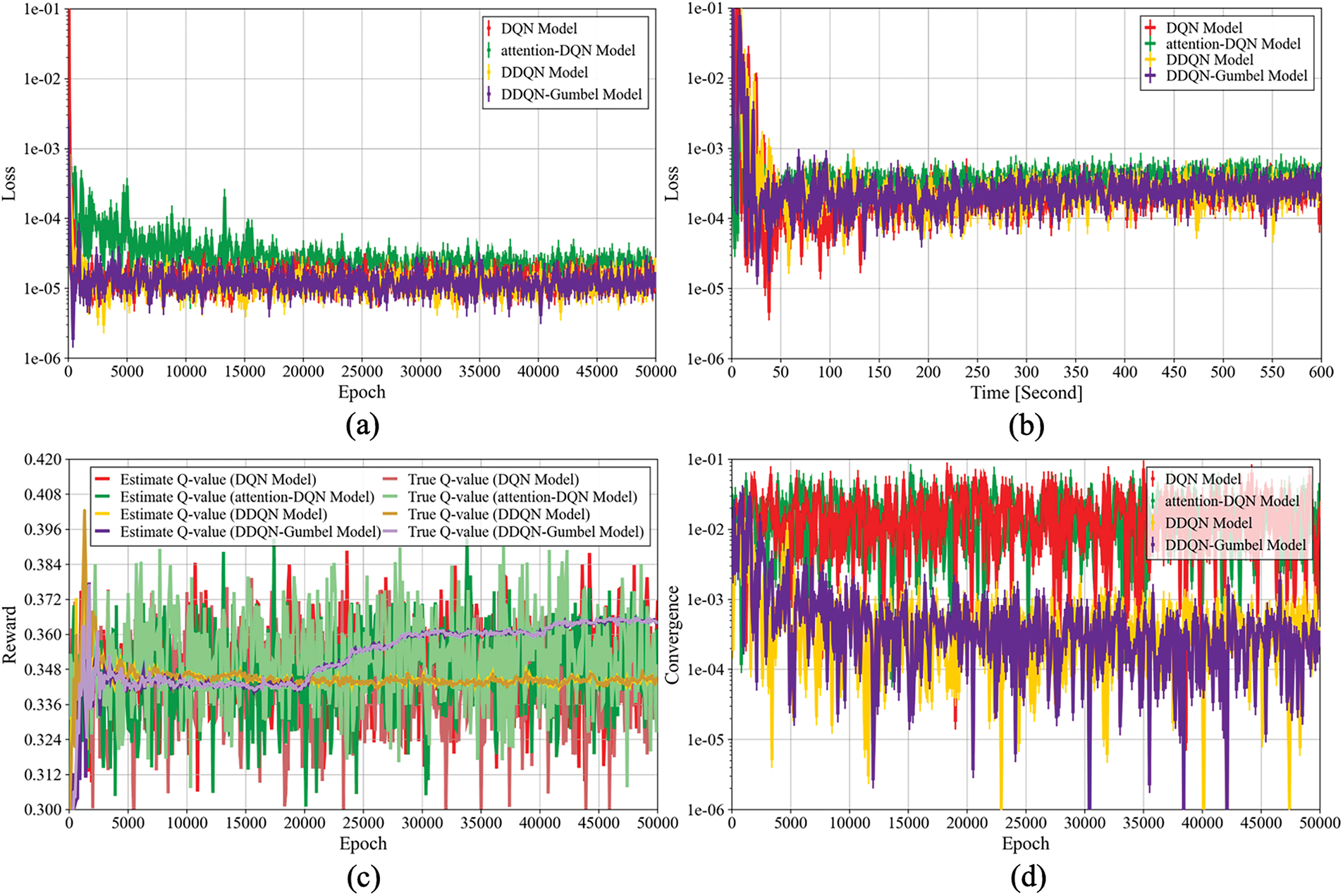
Figure 3: Comparison of DQN, attention-DQN, DDQN, and DDQN-Gumbel models, where (a) shows training loss over 50,000 epochs in a static setting, (b) illustrates training loss under time-varying STA distributions, (c) presents estimated versus actual Q-values to analyze overestimation bias, and (d) visualizes convergence trends across training epochs
Fig. 3a illustrates the training loss trajectories of DQN, attention-DQN, DDQN, and DDQN(Gumbel) over 50,000 epochs under a static STA setting. The DQN model shows fast early convergence, but its single-network design leads to noticeable fluctuations and instability in later stages due to overestimation errors. The attention-DQN model incorporates a SE mechanism to emphasize relevant features, which helps reduce initial noise but results in elevated and persistent variance throughout training, indicating limited gain in stability under static conditions. The DDQN model achieves a consistently smooth and low-loss profile across epochs. Its double-network structure effectively separates action evaluation and selection, mitigating overestimation and enabling stable learning. The DDQN(Gumbel) model maintains a similar stable trend with slightly higher variance in early epochs due to stochastic exploration. However, the noise injection does not destabilize training and may support broader policy discovery, especially during early learning.
Fig. 3b shows the training loss of DQN, attention-DQN, DDQN, and DDQN(Gumbel) models over 600 s as the number of STAs gradually increases from 5 to 100. All models exhibit rapid initial loss reduction under light traffic (0–100 s). As STA density rises, DQN begins to show growing instability, with frequent fluctuations due to its single-network design and limited adaptability to dynamic contention. The attention-DQN improves early-phase performance by emphasizing relevant traffic features through its SE module, but its loss remains noisy under high contention, indicating that attention alone cannot resolve DQN’s weak generalization. DDQN maintains low and steady loss throughout, benefiting from its dual-network architecture that reduces overestimation and stabilizes learning across traffic transitions. Notably, DDQN(Gumbel) adapts the best under increasing congestion. While its stochastic exploration introduces slight early variance, it quickly stabilizes and maintains a low loss level. The added Gumbel noise enables targeted exploration of high-reward CW actions, improving responsiveness without degrading training stability.
Fig. 3c quantifies overestimation bias as the gap between predicted (estimated) and actual Q-values over training epochs. Smaller gaps indicate better value estimation and more reliable policy updates. The DQN model shows clear overestimation throughout training, with a mean estimated Q-value of 0.3488 and a true value of 0.3424. The attention-DQN model slightly reduces variance and captures useful traffic features, but it reverses the bias direction with a mean estimate of 0.3469 and actual value of 0.3518, leading to mild underestimation in later stages. The DDQN model achieves the best alignment, with nearly identical estimated and actual values (0.3446 vs. 0.3448), thanks to its separate networks for action selection and evaluation, which effectively mitigate overestimation. The DDQN(Gumbel) model follows this trend closely, maintaining strong alignment (0.3516 vs. 0.3518) while gradually increasing its estimated values after epoch 20,000. This upward shift results from Gumbel-driven tail exploration, encouraging the agent to discover high-reward actions. Overall, both DDQN-based models outperform DQN in bias control, with DDQN(Gumbel) offering enhanced adaptability while maintaining estimation precision.
Fig. 3d depicts the convergence behavior of the DQN, attention-DQN, DDQN, and DDQN(Gumbel) models over 50,000 training epochs. The convergence metric, defined as the absolute difference between predicted and target Q-values, reflects the alignment and stability of updates. The DQN model exhibits persistent fluctuations around 1e−2. The attention-DQN shows similar improvement, as its feature reweighting slightly smooths early instability, but fails to resolve deeper Q-value misalignment. Compare to this, the DDQN model achieves improved consistency, with convergence values narrowing to the 1e−3 to 1e−4 range due to its use of separate networks for action selection and evaluation. Despite introducing Gumbel noise, the DDQN(Gumbel) model retains stable convergence similar to DDQN. These findings validate that incorporating Gumbel-based exploration into DDQN not only preserves training stability and convergence, but also improves robustness in dynamic traffic conditions. Given the promising results of DDQN(Gumbel), we evaluate various Gumbel-based exploration strategies to identify the most effective method for adaptive CW optimization under varying network loads.
5.3 The Action Exploration Stratgies Comparison
Fig. 4 compares the throughput performance of four Gumbel-based exploration strategies—Gumbel-Max, Gumbel-Softmax, Top-k Gumbel, and Boltzmann-Gumbel—under a time-varying setting where the number of STAs increases gradually from 5 to 100. Gumbel-Softmax consistently delivers the highest throughput (0.675–0.685), benefiting from smooth, tunable sampling that promotes tail actions without destabilizing policy transitions. Its ability to fine-tune exploration intensity allows stable adaptation as contention increases. Boltzmann-Gumbel performs second-best (0.645–0.670), adaptively prioritizing underexplored actions via noise scaling based on visitation frequency; however, this adaptability diminishes under saturated states where noise contribution flattens, slightly reducing performance during late-stage congestion. Gumbel-Max (0.615–0.645) aggressively samples extreme actions by selecting the max perturbed Q-value, but without smoothing, its policy becomes erratic as STAs grow, causing unstable CW decisions and more collisions. Top-k Gumbel shows the weakest performance (~0.63→~0.60), as its random sampling from a limited action subset suppresses exploration diversity and prevents precise CW tuning under heavy contention. These observations confirm that Gumbel-Softmax achieves the best trade-off between exploration focus and decision smoothness, making it the most reliable strategy under dynamic loads. Hence, it is adopted in SETL-DDQN(Gumbel) for all subsequent benchmarking and evaluations.
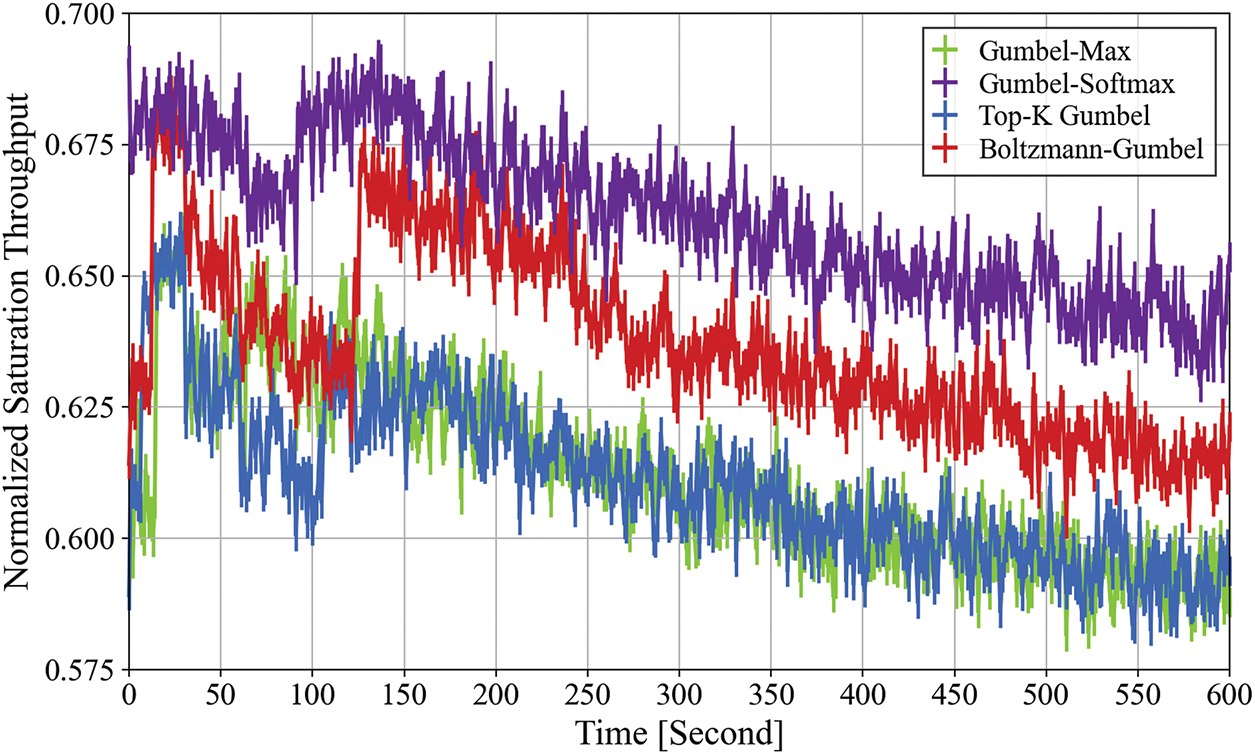
Figure 4: Normalized saturation throughput of four Gumbel-based exploration strategies under time-varying STA growth (5–100 over 600 s), highlighting adaptability and stability in time-varying scenario
5.4 The Performance Benchmarking
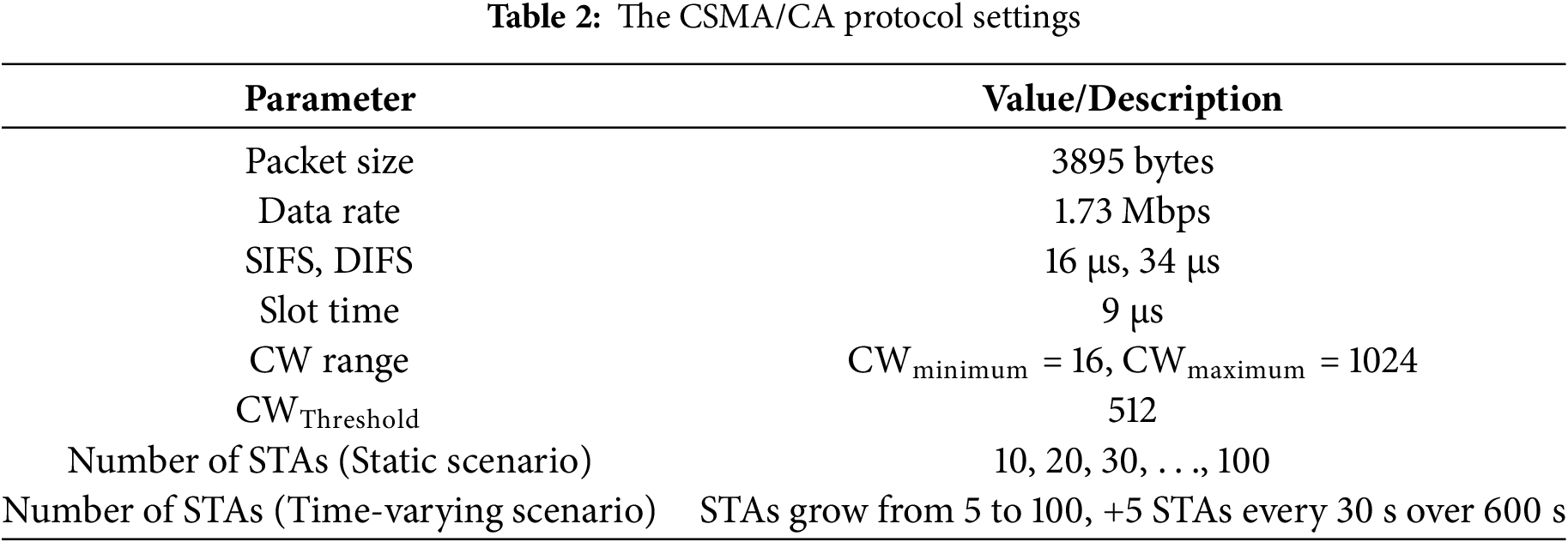
This study benchmarks our proposed SETL-DDQN and SETL-DDQN(Gumbel) methods against established CW adaptation approaches. The deterministic methods include standard CSMA/CA [4] and SETL [10], while DRL-based comparisons involve DQN-based models such as CCOD-DQN [22] and SETL-DQN [25], along with the DDQN-based DCWO-DDQN [28]. To broaden the evaluation, we also include SETL-DQN(MA) [26], a distributed multi-agent DRL approach for CW optimization. All benchmarks are evaluated under static and time-varying scenarios (see Table 2), providing a comprehensive assessment of collision rates (Figs. 5 and 6) and normalized saturation throughput (Figs. 7 and 8) across diverse network settings.
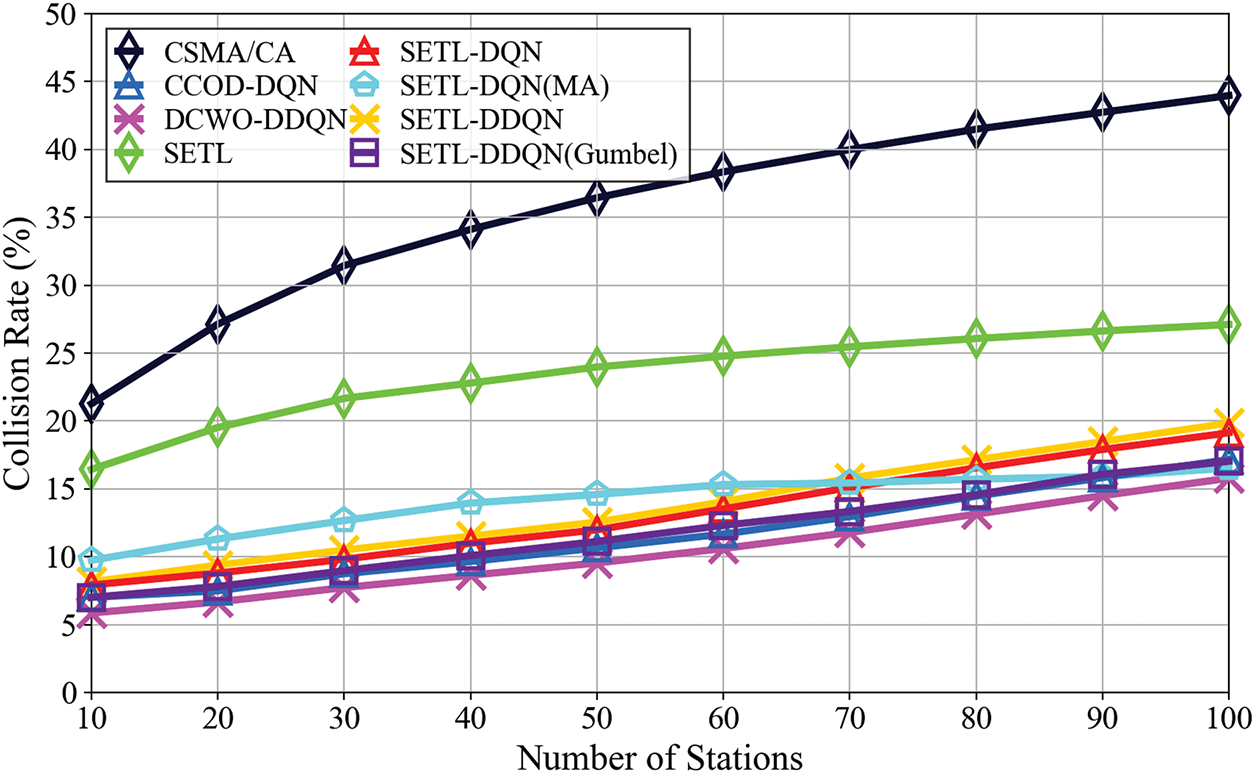
Figure 5: Collision rate convergence in static topology
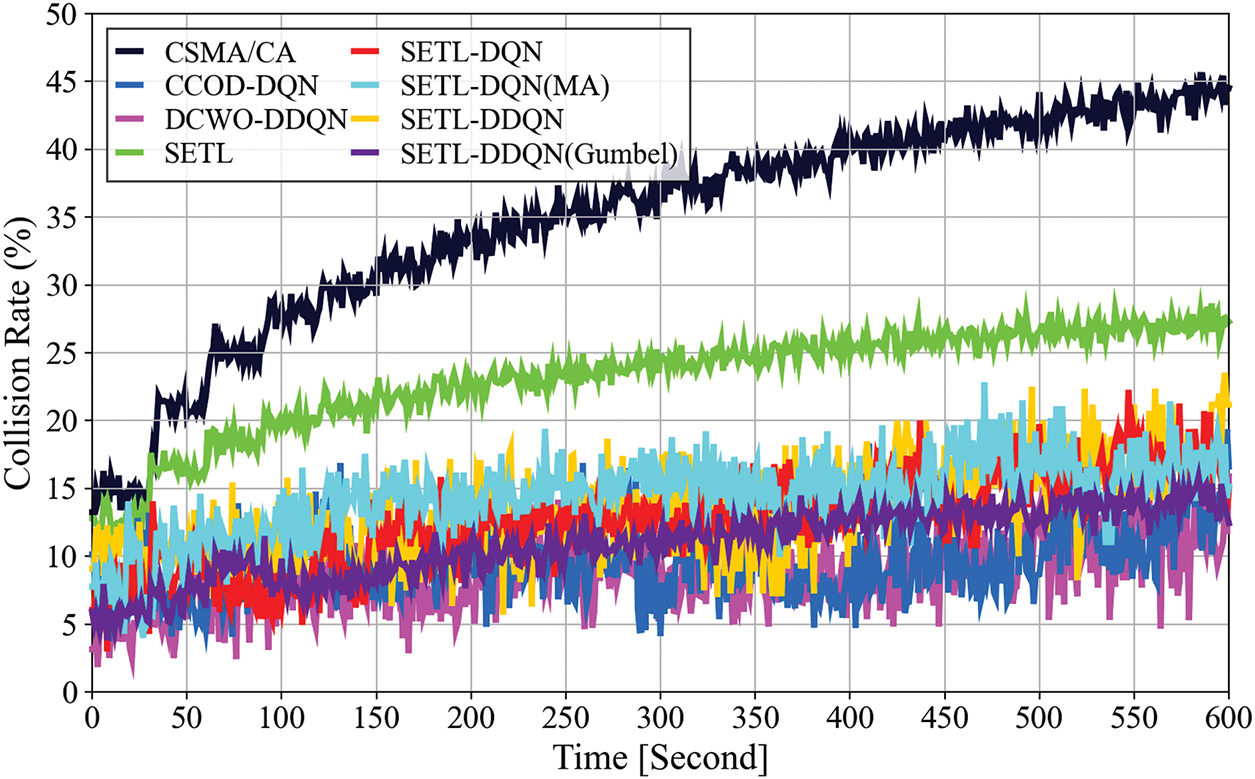
Figure 6: Experimental collision rate convergence in time-varying topology
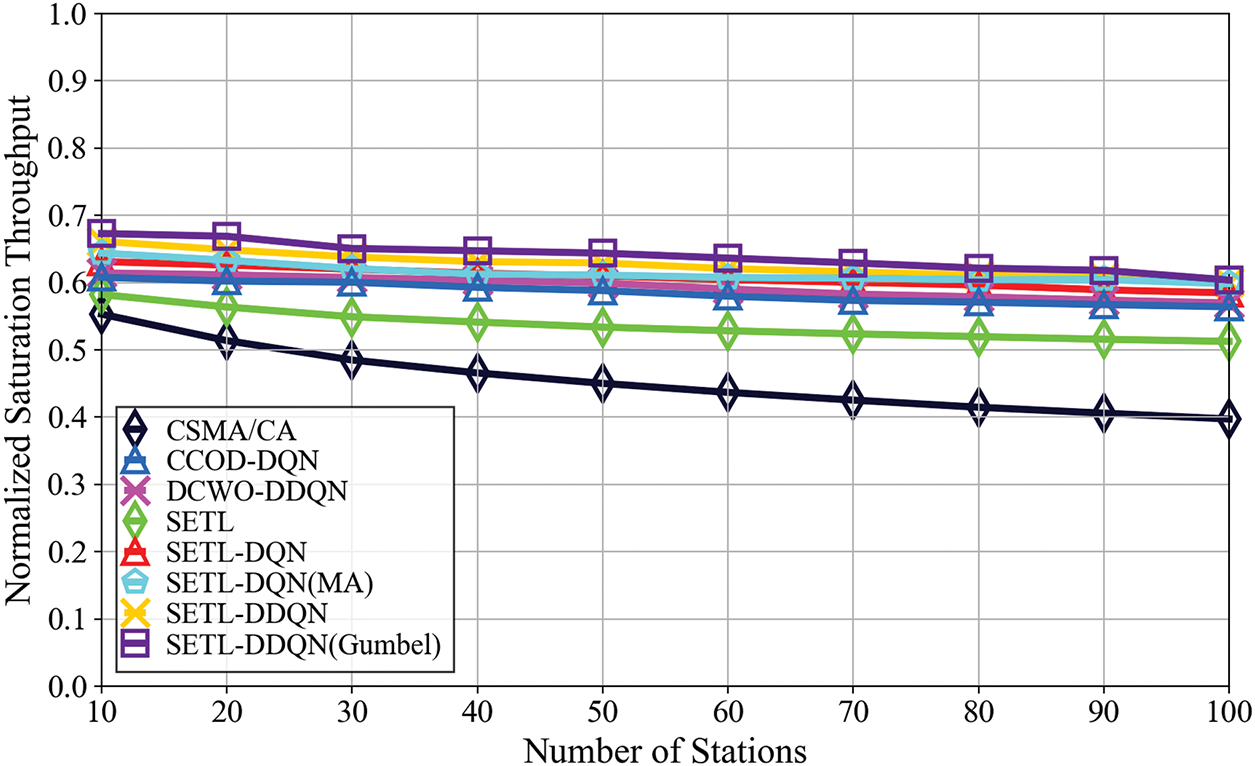
Figure 7: Normalized saturation throughput convergence for static topology
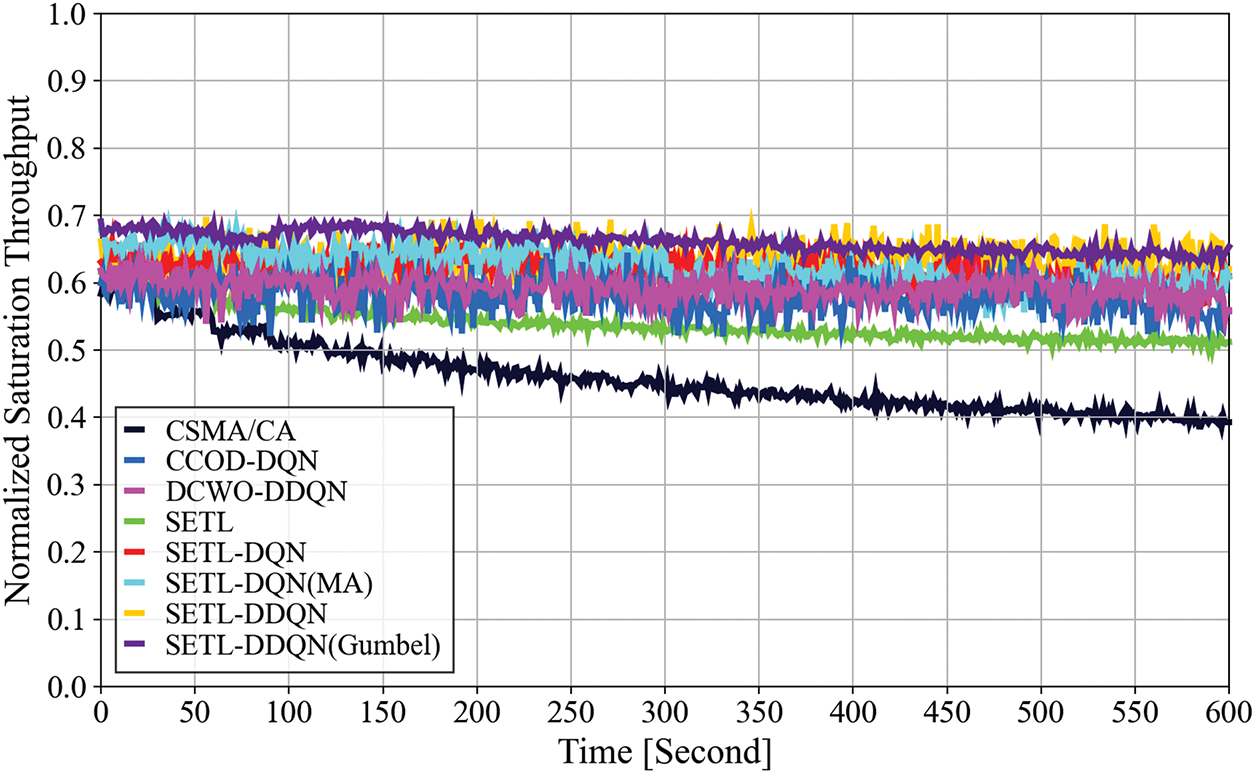
Figure 8: Experimental normalized saturation throughput convergence under time-varying topology
Fig. 5 compares collision rates under a static scenario (10–100 STAs) for deterministic and DRL-based CW adaptation methods. Legacy CSMA/CA shows the highest collision rates (21.26%–43.96%), reflecting its exponential backoff’s inability to balance collisions and idle periods in dense conditions. The SETL method reduces collisions to 16.43%–27.10% using threshold-based exponential and linear adjustments, though its performance degrades with increasing contention. In contrast, DRL methods like CCOD-DQN (7.00%–17.16%) and DCWO-DDQN (5.85%–15.78%) dynamically adjust CW values over extended training, significantly lowering collisions. SETL-DQN (7.91%–19.12%) and SETL-DDQN (8.15%–19.84%) further decrease collision rates by incorporating the SETL mechanism into DQN/DDQN frameworks. We also include SETL-DQN(MA), a fully cooperative multi-agent variant of SETL-DQN, which achieves collision rates of 9.74%–16.53% by enabling agents to coordinate CW decisions. Although its early-stage performance is favorable, its collision rate increases with STA density due to overhead from frequent coordination. Notably, our proposed SETL-DDQN(Gumbel) achieves collision rates between 7.00% and 17.02%, closely matching CCOD-DQN while leveraging Gumbel-driven exploration to enhance adaptability under fluctuating loads. Although DCWO-DDQN achieves the lowest collision rates overall, SETL-DDQN(Gumbel) remains competitive and performs robustly in moderate contention scenarios.
Fig. 6 depicts that in a time-varying scenario (0–600 s). The legacy CSMA/CA shows the widest collision range (13.23%–44.52%), reflecting its limited adaptability as STA counts increase. The SETL method, which employs a threshold-based CW adjustment, reduces collisions 12.81%–27.28% compared to basic BEB; however, its fixed
Fig. 7 presents the normalized saturation throughput for varying network loads (10–100 STAs), where SETL-DDQN(Gumbel) delivers the highest throughput across light (10–40 STAs), medium (40–70 STAs), and heavy (70–100 STAs) conditions. In light loads, throughput of about 0.67–0.647 is sustained through rapid
Fig. 8 illustrates normalized saturation throughput in a time-varying scenario. As in the static case, our SETL-DDQN(Gumbel) achieves the highest mean throughput (0.66), followed by SETL-DDQN (0.63), SETL-DQN(MA) (0.62), and SETL-DQN (0.62). These threshold-based methods with DQN/DDQN models benefit from adaptive
This paper proposes SETL-DDQN and SETL-DDQN(Gumbel) for Contention Window (CW) optimization in IEEE 802.11 Networks, which are designed to mitigate overestimation bias and adapt to varying traffic loads. Through the synergy of threshold-based backoff control (
Acknowledgement: The authors would like to thank all individuals who contributed to this work. Their support and insights were valuable in shaping the results presented in this paper.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Yi-Hao Tu; software and data collection: Yi-Hao Tu; analysis and interpretation of results: Yi-Hao Tu; draft manuscript preparation: Yi-Hao Tu; manuscript review and editing: Yi-Hao Tu, Yi-Wei Ma; project supervision and funding acquisition: Yi-Wei Ma. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Ahamad RZ, Javed AR, Mehmood S, Khan MZ, Noorwali A, Rizwan M. Interference mitigation in D2D communication underlying cellular networks: towards green energy. Comput Mater Contin. 2021;68(1):45–58. doi:10.32604/cmc.2021.016082. [Google Scholar] [CrossRef]
2. Sivaram M, Yuvaraj D, Mohammed AS, Manikandan V, Porkodi V, Yuvaraj N. Improved enhanced DBTMA with contention-aware admission control to improve the network performance in MANETs. Comput Mater Contin. 2019;60(2):435–54. doi:10.32604/cmc.2019.06295. [Google Scholar] [CrossRef]
3. Binzagr F, Prabuwono AS, Alaoui MK, Innab N. Energy efficient multi-carrier NOMA and power controlled resource allocation for B5G/6G networks. Wire Net. 2024;30(9):7347–59. doi:10.1007/s11276-023-03604-1. [Google Scholar] [CrossRef]
4. Crow BP, Widjaja I, Kim JG, Sakai PT. IEEE 802.11 wireless local area networks. IEEE Commun Mag. 1997;35(9):116–26. doi:10.1109/35.620533. [Google Scholar] [CrossRef]
5. Lee MW, Hwang G. Adaptive contention window control scheme in wireless ad hoc networks. IEEE Commun Letters. 2018;22(5):1062–5. doi:10.1109/LCOMM.2018.2813361. [Google Scholar] [CrossRef]
6. Liew JT, Hashim F, Sali A, Rasid MFA, Jamalipour A. Probability-based opportunity dynamic adaptation (PODA) of contention window for home M2M networks. J Net Comp App. 2019;144(5):1–12. doi:10.1016/j.jnca.2019.06.011. [Google Scholar] [CrossRef]
7. Song NO, Kwak BJ, Song J, Miller ME. Enhancement of IEEE 802.11 distributed coordination function with exponential increase exponential decrease backoff algorithm. In: Proceedings of the 57th IEEE Semiannual Vehicular Technology Conference; 2003 Apr 22–25; Jeju, Republic of Korea. [Google Scholar]
8. Bharghavan V, Demers A, Shenker S, Zhang L. MACAW: a media access protocol for wireless LANs. ACM SIGCOMM Comp Commun Rev. 1994;24(4):212–25. doi:10.1145/190809.190334. [Google Scholar] [CrossRef]
9. Chen WT. An effective medium contention method to improve the performance of IEEE 802.11. Wire Net. 2008;14(6):769–76. doi:10.1007/s11276-006-0012-7. [Google Scholar] [CrossRef]
10. Ke CH, Wei CC, Lin KW, Ding JW. A smart exponential-threshold-linear backoff mechanism for IEEE 802.11 WLANs. Inter J Commun Sys. 2011;24(8):1033–48. doi:10.1002/dac.1210. [Google Scholar] [CrossRef]
11. Shakya AK, Pillai G, Chakrabarty S. Reinforcement learning algorithms: a brief survey. Expert Sys App. 2023;231(7):120495. doi:10.1016/j.eswa.2023.120495. [Google Scholar] [CrossRef]
12. Kim TW, Hwang GH. Performance enhancement of CSMA/CA MAC protocol based on reinforcement learning. J Info Commun Conv Eng. 2021;19(1):1–7. doi:10.6109/jicce.2021.19.1.1. [Google Scholar] [CrossRef]
13. Zerguine N, Mostefai M, Aliouat Z, Slimani Y. Intelligent CW selection mechanism based on Q-learning (MISQ). Ingénierie Des Systèmes D’Inf. 2020;25(6):803–11. doi:10.18280/isi.250610. [Google Scholar] [CrossRef]
14. Kwon JH, Kim D, Kim EJ. Reinforcement learning-based contention window adjustment for wireless body area networks. In: Proceedings of the 4th International Conference on Big Data Analytics and Practices; 2023 Aug 25–27; Bangkok, Thailand. [Google Scholar]
15. Pan TT, Lai IS, Kao SJ, Chang FM. A Q-learning approach for adjusting CWS and TxOP in LAA for Wi-Fi and LAA coexisting networks. Inter J Wire Mobile Comp. 2023;25(2):147–59. doi:10.1504/IJWMC.2023.133061. [Google Scholar] [CrossRef]
16. Lee CK, Lee DH, Kim J, Lei X, Rhee SH. Q-learning-based collision avoidance for 802.11 stations with maximum requirements. KSII Trans Int Info Sys (TIIS). 2023;17(3):1035–48. doi:10.3837/tiis.2023.03.019. [Google Scholar] [CrossRef]
17. Zheng Z, Jiang S, Feng R, Ge L, Gu C. An adaptive backoff selection scheme based on Q-learning for CSMA/CA. Wire Net. 2023;29(4):1899–909. doi:10.1007/s11276-023-03257-0. [Google Scholar] [CrossRef]
18. Mnih V, Kavukcuoglu K, Silver D, Rusu AA, Veness J, Bellemare MG, et al. Human-level control through deep reinforcement learning. Nature. 2015;518:529–33. doi:10.1038/nature14236. [Google Scholar] [PubMed] [CrossRef]
19. Wang X, Garg S, Lin H, Kaddoum G, Hu J, Hossain MS. A secure data aggregation strategy in edge computing and blockchain-empowered Internet of Things. IEEE Internet Things J. 2022;9(16):14237–46. doi:10.1109/JIOT.2020.3023588. [Google Scholar] [CrossRef]
20. Wang X, Garg S, Lin H, Kaddoum G, Hu J, Hassan MM. Heterogeneous blockchain and AI-driven hierarchical trust evaluation for 5G-enabled intelligent transportation systems. IEEE Trans Intel Transport Syst. 2023;24(2):2074–83. doi:10.1109/TITS.2021.3129417. [Google Scholar] [CrossRef]
21. Subash N, Nithya B. Dynamic adaptation of contention window boundaries using deep Q networks in UAV swarms. Inter J Comp App. 2024;46(3):167–74. doi:10.1080/1206212X.2023.2296720. [Google Scholar] [CrossRef]
22. Wydmański W, Szott S. Contention window optimization in IEEE 802.11 ax networks with deep reinforcement learning. In: Proceedings of the 2021 IEEE Wireless Communications and Networking Conference; 2021 Mar 29–Apr 1; Nanjing, China. [Google Scholar]
23. Sheila de Cássia SJ, Ouameur MA, de Figueiredo FAP. Reinforcement learning-based Wi-Fi contention window optimization. J Commun Info Sys. 2023;38(1):128–43. doi:10.14209/jcis.2023.15. [Google Scholar] [CrossRef]
24. Lei J, Tan D, Ma X, Wang Y. Reinforcement learning-based multi-parameter joint optimization in dense multi-hop wireless networks. Ad Hoc Net. 2024;154(11):103357. doi:10.1016/j.adhoc.2023.103357. [Google Scholar] [CrossRef]
25. Ke CH, Astuti L. Applying deep reinforcement learning to improve throughput and reduce collision rate in IEEE 802.11 networks. KSII Trans Int Info Syst. 2022;16(1):334–49. doi:10.3837/tiis.2022.01.019. [Google Scholar] [CrossRef]
26. Ke CH, Astuti L. Applying multi-agent deep reinforcement learning for contention window optimization to enhance wireless network performance. ICT Exp. 2023;9(5):776–82. doi:10.1016/j.icte.2022.07.009. [Google Scholar] [CrossRef]
27. Van Hasselt H, Guez A, Silver D. Deep reinforcement learning with double Q-learning. In: Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence; 2016 Feb 12–17; Phoenix, AZ, USA. [Google Scholar]
28. Asaf K, Khan B, Kim GY. Wireless LAN performance enhancement using double deep Q-networks. Appl Sci. 2022;12(9):4145. doi:10.3390/app12094145. [Google Scholar] [CrossRef]
29. Chakraborty S, Chakravarty D. A discrete Gumbel distribution. arXiv:1410.7568. 2014. [Google Scholar]
30. Astuti L, Lin YC, Chiu CH, Chen WH. Predicting vulnerable road user behavior with Transformer-based Gumbel distribution networks. IEEE Trans Auto Sci Eng. 2025;22:8043–56. doi:10.1109/TASE.2024.3476382. [Google Scholar] [CrossRef]
31. Daud H, Suleiman AA, Ishaq AI, Alsadat N, Elgarhy M, Usman A, et al. A new extension of the Gumbel distribution with biomedical data analysis. J Radiat Res Appl Sci. 2024;17(4):101055. doi:10.1016/j.jrras.2024.101055. [Google Scholar] [CrossRef]
32. Mehrnia N, Coleri S. Wireless channel modeling based on extreme value theory for ultra-reliable communications. IEEE Trans Wire Commun. 2022;21(2):1064–76. doi:10.1109/TWC.2021.3101422. [Google Scholar] [CrossRef]
33. Strypsteen T, Bertrand A. Conditional Gumbel-Softmax for constrained feature selection with application to node selection in wireless sensor networks. arXiv:2406.01162. 2024. [Google Scholar]
34. Miridakis NI, Shi Z, Tsiftsis TA, Yang G. Extreme age of information for wireless-powered communication systems. IEEE Wire Commun Letters. 2022;11(4):826–30. doi:10.1109/LWC.2022.3146389. [Google Scholar] [CrossRef]
35. Lauri M, Hsu D, Pajarinen J. Partially observable markov decision processes in robotics: a survey. IEEE Trans Robot. 2022;39(1):21–40. doi:10.1109/TRO.2022.3200138. [Google Scholar] [CrossRef]
36. Xie SM, Ermon S. Reparameterizable subset sampling via continuous relaxations. arXiv:1901.10517. 2019. [Google Scholar]
37. Afify AZ, Yousof HM, Cordeiro GM, M. Ortega EM, Nofal ZM. The Weibull Fréchet distribution and its applications. J Appl Stat. 2016;43(14):2608–26. doi:10.1080/02664763.2016.1142945. [Google Scholar] [CrossRef]
38. Hu J, Shen L, Sun G. Squeeze-and-excitation networks. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition; 2018 Jun 19–21; Salt Lake, UT, USA. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools