
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Real-Time and Energy-Aware UAV Routing: A Scalable DAR Approach for Future 6G Systems
1 EsieaLab LDR, Higher School of Computer Science, Electronics and Automation (ESIEA), Paris, 75005, France
2 ISI Laboratory, National School of Applied Sciences (ENSA), Abdelmalek Essaadi University, Tetouan, 93000, Morocco
3 School of Arts, Science, and Technology, University Canada West, Vancouver, BC V6B 1V9, Canada
4 GUS Institute, Global University Systems, London, EC1N 2LX, UK
5 Ibn Tofail University, Kenitra, 14000, Morocco
* Corresponding Author: Khadija Slimani. Email:
Computers, Materials & Continua 2025, 85(3), 4667-4686. https://doi.org/10.32604/cmc.2025.070173
Received 10 July 2025; Accepted 08 September 2025; Issue published 23 October 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The integration of the dynamic adaptive routing (DAR) algorithm in unmanned aerial vehicle (UAV) networks offers a significant advancement in addressing the challenges posed by next-generation communication systems like 6G. DAR’s innovative framework incorporates real-time path adjustments, energy-aware routing, and predictive models, optimizing reliability, latency, and energy efficiency in UAV operations. This study demonstrated DAR’s superior performance in dynamic, large-scale environments, proving its adaptability and scalability for real-time applications. As 6G networks evolve, challenges such as bandwidth demands, global spectrum management, security vulnerabilities, and financial feasibility become prominent. DAR aligns with these demands by offering robust solutions that enhance data transmission while ensuring network reliability. However, obstacles like global route optimization and signal interference in urban areas necessitate further refinement. Future directions should explore hybrid approaches, the integration of machine learning, and comprehensive real-world testing to maximize DAR’s capabilities. The findings underscore DAR’s pivotal role in enabling efficient and sustainable UAV communication systems, contributing to the broader landscape of wireless technology and laying a foundation for the seamless transition to 6G networks.Keywords
Wireless communication technology development has expedited the migration between generations which has delivered major advancements in speed and latency and connectivity improvements to the network. 6G represents the next step following 5G but its capabilities extend toward creating new wireless network fundamentals. The implementation of 6G technology will combine artificial intelligence (AI) with the Internet of Things (IoT) alongside unmanned aerial vehicles (UAVs) for widespread intelligent connectivity in various locations [1–3].
The attention on UAV-enabled 6G networks grows rapidly because they supply flexible communication systems that provide high performance alongside scalability. UAVs will fulfill an essential function within the 6G network ecosystem because they function as mobile wireless access points that enhance coverage and enable ultra-reliable low-latency communications (URLLC) while optimizing spectral efficiency across open regions and population-dense areas [4,5]. Advancing optimization methods remains essential to achieve smooth UAV network integration within 6G because these methods help administrators handle resources effectively and reduce interference while making systems more adaptable. Complex mathematical models working with algorithms will serve as critical tools for optimizing time-based decisions and network performance and resource distribution within UAV-assisted 6G systems [6,7]. The combination of convex optimization with game theory algorithms using artificial intelligence algorithms will enhance network efficiency and support both low-latency and high-throughput [8,9].
6G UAV networks with their dynamic operational requirements need new solutions for routing and connectivity framework development. The adaptability requirements from UAV-assisted communication challenge conventional network architectures, which motivate the creation of adaptive solutions such as dynamic adaptive routing (DAR). DAR frameworks create dynamic routing paths which automatically adjust routing paths to real-time network and environmental factors in order to enhance network adaptability and connectivity, as well as resilience [6,10]. The effectiveness of DAR increases through machine learning algorithms that enable predictive network analytics for proactively optimized operations [11,12].
This study proposes an advanced framework based on distributed artificial intelligence to boost UAV-based communication capabilities and adaptability, enabling seamless integration of 6G technologies into various industrial applications [6,13]. It aims to develop next-generation connectivity solutions for both urban and remote areas by advancing UAV-enabled 6G networks. Furthermore, this work provides several key contributions to the field of UAV network optimization:
• First, it introduces a novel dynamic adaptive routing (DAR) algorithm designed specifically for high mobility UAV networks operating under 6G constraints. DAR integrates multi-metric decision making to optimize critical performance parameters such as latency, reliability, and energy efficiency in real-time.
• Second, the paper presents a mathematically grounded routing framework that balances link stability, signal strength, and residual energy thresholds using a pheromone-inspired path selection mechanism.
• Finally, the study validates the effectiveness of DAR through extensive simulations using the NS-3 platform in diverse terrains, including urban, rural, and mountainous environments, demonstrating that the proposed algorithm consistently outperforms benchmark algorithms such as Ant Colony Optimization (ACO), Reinforcement Learning-Based Routing (RLR), and Particle Swarm Optimization (PSO) across all key performance indicators.
These contributions collectively advance the scalability, adaptability, and sustainability of UAV communication networks in next-generation wireless ecosystems.
The remainder of this paper is organized as follows. The literature review is presented in Section 2. Section 3 illustrates the methodology, describing the experimental design, simulation setup, key components of DAR, the proposed approach, and the evaluation metrics used. Section 4 presents the results, while Section 5 discusses and synthesizes them. The challenges and limitations are described in Section 6, and Section 7 concludes by summarizing the findings and outlining future work.
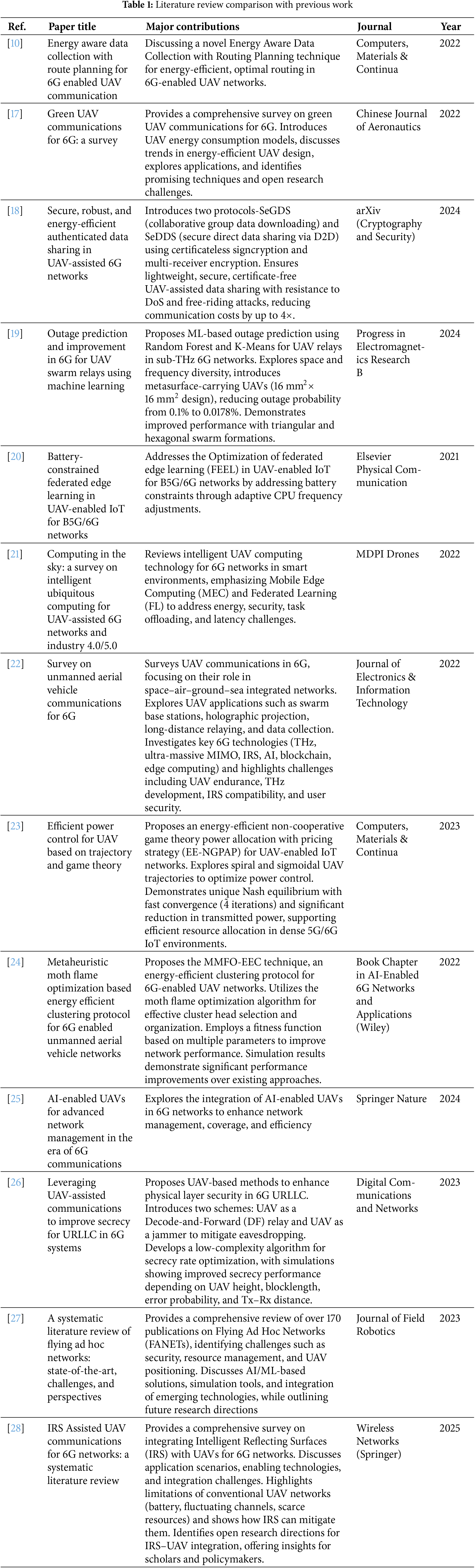
The forthcoming 6G networks using UAVs will gain additional support from two emerging technologies which include THz communication systems and quantum communication systems. THz communication uses unused spectrum bands to achieve ultra-rapid data transmissions and solves the rising requirement for broad spectrum applications [1,3]. Quantum communication provides optimal security through quantum mechanics rules to secure data in UAV-supported networks [14]. The data and spectral efficiency of multi-UAV communication systems improves through Spatial Modulation (SM) as it optimizes antenna utilization [15,16]. Memory-based integration of UAVs into 6G networks faces obstacles which stem from spectrum management issues and energy efficiency requirements, as well as network co-existence complications. The research community has investigated separate aspects of 6G technologies, but there exists a limited understanding of the interaction between UAV networks and the upcoming communication infrastructure (see Table 1).
2.1 Sixth-Generation Network’s Aspects
6G stands as the next generation of telecommunication networks which combines ultrafast data speeds with remarkably reliable connectivity and incredibly minimal delays. This part analyzes 6G technical elements specifically for their effects on unmanned aerial vehicle systems. New adaptive algorithms have been created exclusively to upgrade the performance of UAV systems managed through 6G networks. The data communication infrastructure of 6G includes enhanced machine-to-machine (M2M) capabilities together with intelligent network controls and high-frequency band implementations, which will help develop UAV technology while establishing enormous Internet of Things (IoT) frameworks. The integration of artificial intelligence (AI) and machine learning (ML) technologies into 6G networks enables enhanced resource allocation and superior network management beyond existing capabilities [24,29–31].
2.1.1 Latency Optimization and Enhanced Efficacy
The target time span for 6G network delays is 0.1 milliseconds, while 5G currently operates at one millisecond. Ultra-fast latency remains vital because it enables real-time applications to function successfully through emergency responses along with remote surgery requirements as well as advanced manufacturing automation systems. In high-risk applications of UAVs for search and rescue operations together with environmental monitoring missions, latency reductions result in faster data transfer which enhances accurate UAV flight control. The latency equation which controls 6G network operations for UAV applications continues to evolve thanks to advanced algorithms that enable nearly instant data exchange according to [32] and [33].
where RTT denotes Round-Trip Time.
The forthcoming 6G networks will deliver peak rates of 1000 Gbps along with average rates that exceed 1 Gbps. Providing real-time UAV video feeds together with analytics demands these capabilities from the network framework. The elevated spectral efficiency by a factor of ten creates better user access to multimedia content which strengthens machine dependability while improving real-time drone swarm control programs [34,35].
2.1.2 Reliability and High Precision in Communication
6G warrants reliability as its principal foundation, especially within regions with restricted connectivity capabilities. 6G technology integrates innovative reliability models which emphasize redundancy along with error correction capabilities and real-time network adaptiveness to fulfill UAV requirements. The reliability (R) equation serves as the optimized failure rate that describes UAV-to-network communications performance [36,37].
where, the failure probability in UAV communications is represented by the symbol
The error correction mechanisms within 6G together with redundant communication paths specifically suit UAVs operating at different altitudes and fast speeds. The data integrity for UAVs remains strong because of these performance improvements across dynamic operational settings. Reliable performances enable missions of UAVs during critical infrastructure inspections and rural internet delivery which is supported by studies cited in [37,38]. The reliable operation of UAVs in their dynamic environment depends heavily on AI-driven solutions for predictive maintenance and proactive network management according to [39,40].
2.1.3 High-Speed Data Transmission and Advanced Spectrum Utilization
6G adjusts its operations to incorporate frequencies from the THz range, which supports higher data rates to satisfy user needs. High-definition video and sensor data moves through the high-frequency channels which supports real-time computer communication with UAVs. The transmission speed through the 300 GHz frequency band provides greater than 100 Gbps delivery which goes beyond 5G’s maximum achievable speeds. Autonomous UAV navigation and real-time analytics function best with these essential components according to [34] and [41].
6G technology promotes UAV operations in dense and challenging environments including urban areas and mountains by providing rapid data transfer and efficient spectral usage which supports critical real-time processing and adaptability needs. These technological developments give UAVs the capability to execute real-time obstacle navigation decisions and route adjustments which boost operational performance levels [42,43]. The performance improvement of next-generation UAV systems in 6G networks depends on terahertz communication technologies according to research reports [41,43].
2.1.4 Energy Efficiency and Sustainable Operation
The energy efficiency of 6G proves vital because UAVs operate with power consumption as their major operational limitation. 6G networks provide energy-saving protocols that help UAVs maximize battery power to carry out missions of extended duration. New research indicates 6G power-saving techniques can cut down network energy usage, which supports UAV functionality best especially when operating in remote or disaster areas [44].
6G networks enable adaptive power management which allows UAVs to alter their operational settings through real-time adjustments based on communication requirements coupled with environmental elements. Such adaptability remains essential in operations like emergency response along with environmental monitoring because optimum energy consumption and connectivity requirements demand special consideration [6,45]. Artificial intelligence and machine learning systems reinforce energy distribution methods and route optimization allowing UAVs to make better decisions [46,47]. As part of its energy-efficient framework 6G works to achieve sustainability goals which builds sustainable telecommunications infrastructure. 6G enables environmental sustainability through reduced expenses and heat emission levels and
2.2 Key Features and Functionalities of Next-Generation Networks
The high-capacity communications along with precise imaging applications will be defined by terahertz broadband communication within UAV-enabled 6G networks (see Fig. 1). Scientific studies prove that UAVs can perform high-resolution data processing at terahertz frequencies to deliver imaging services and environmental monitoring and medical diagnostic capabilities [50].
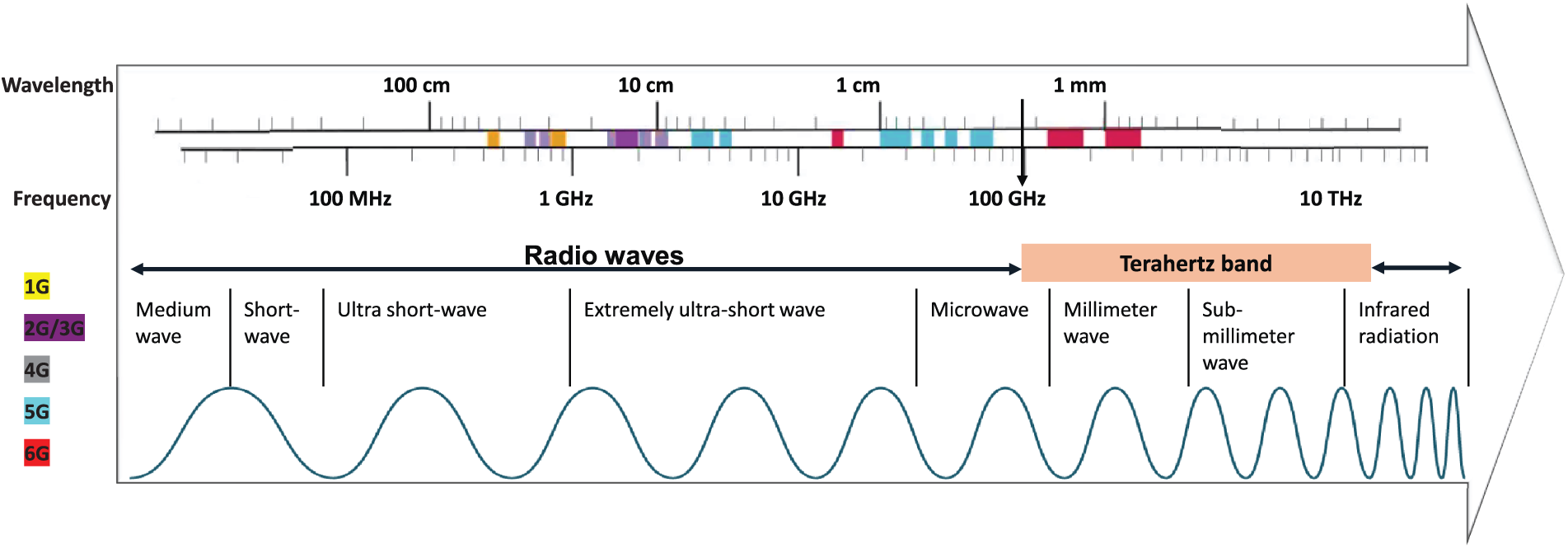
Figure 1: Spectrum allocation for 5th and 6th generation wireless technologies
Quantum Key Distribution together with other quantum communication techniques provide promising secure communication channels which are vital for safeguarding UAV operations against interception [51]. Artificial intelligence systems will execute real-time network optimization because they manage resource distribution and efficiency in unpredictable conditions where autonomous UAVs function [2].
By adding terahertz frequencies the UAV applications gain enhanced environmental sensing and imaging capabilities which leads to improved disaster response alongside better medical diagnostics through high-resolution data transmission [52]. The smooth connection of legacy systems with advanced 6G technologies allows secure interoperable communication between different network generations. Such advances will increase operational reliability as well as security for UAV-enabled networks which enables real-time intelligent network management for meeting growing UAV application needs.
2.3 Upcoming Generation of Wireless Communication Networks
The future 6G wireless network will enhance connectivity by offering increased data speeds, faster response times, together with strong automation at the machine level to serve present needs and new emerging systems specifically for UAV networks. 6G exists as a promising network technology which can fulfill bandwidth requirements for the high-data-rate applications of Augmented Reality (AR) and Virtual Reality (VR). According to Zhao et al., the availability of wider bands in higher frequency ranges will deliver necessary speed rates for modern applications [53].
The essential operational success of automated UAV systems demands both real-time communication and ultra-low latency protocols because these elements matter most in key fields such as emergency services and remote medical operations. Through edge computing data processing strategies near the point of use Yang et al. demonstrate that UAVs will experience improved real-time performance and reduced latency in challenging environments [50]. Networks of the next generation need to handle rising IoT device numbers and denser operational networks that emerge with their rapid growth. UAVs require optimized connectivity for their substantial data demands so researchers are studying Non-Orthogonal Multiple Access (NOMA) as a possible advanced multiple access technique [2].
Dynamic adaptive routing (DAR) methodology addresses the issue of increasing robustness and adaptability of data transmission in UAV networks. This approach uses the following mathematical and algorithmic techniques as the basis of efficient, reliable data flow in such highly dynamic environments. It is designed to handle variable network conditions, multiple UAV formations, and diverse communication standards inherent in 6G architectures. An in-depth mathematical framework, incorporating dynamic optimization models, is introduced to accurately forecast the impact of UAV mobility and environmental changes on routing performance.
3.1 Experimental Design and Simulation Setup
To evaluate the DAR framework, simulation experiments were conducted using the NS-3 platform, replicating real-world UAV deployments under various mobility and environmental conditions. A dynamic UAV network was modeled across a 1000
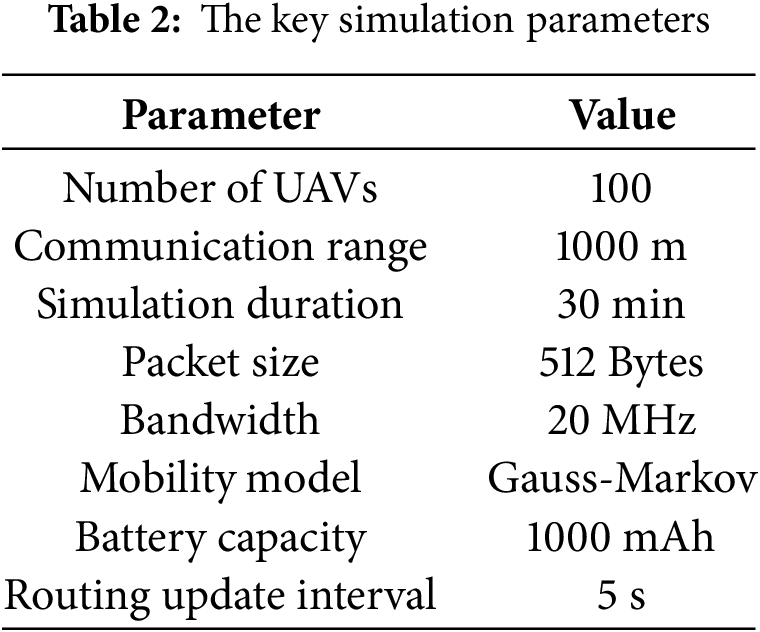
Performance was evaluated across four key metrics: latency, reliability, energy consumption, and disruption probability. The DAR framework was compared against state-of-the-art algorithms such as Ant Colony Optimization (ACO), Particle Swarm Optimization (PSO), and Reinforcement Learning-Based Routing (RLR).
3.2 Key Components of DAR in UAV Networks
Real-time adaptive routing, multi-metric decision making, and route prediction are relied upon by the DAR approach. The elements described in this paper are designed for UAV networks wherein network stability is a function of UAV mobility and environmental factors. The mathematical modeling presented here incorporates real-time data analysis, predictive modeling, and dynamic resource allocation to ensure optimal network performance. The main mathematical and algorithmic techniques also supporting DAR are given here.
3.2.1 Path Selection Based on Multi-Metric Decision System
In DAR, each UAV individually computes link stability, signal strength, and residual battery life to determine the most suitable path. This approach provides a balanced tradeoff between transmission reliability and energy efficiency, which is critical in UAV networks with limited energy resources. The desirability of each path is determined by a weighted combination of these metrics:
• Signal Strength: Communication channels are defined by signal strength, which directly affects data rates and error performance. Signal strength is expressed as the normalized signal-to-noise ratio (SNR), allowing the DAR algorithm to adapt routing decisions in response to varying channel quality.
• Residual Battery Life: Residual battery life indicates the proportion of remaining energy relative to maximum capacity. This ensures routing decisions account for energy efficiency and contribute to maximizing the overall lifespan of the UAV network.
• Link Stability: This metric characterizes the expected duration of UAV communication links, considering relative mobility and environmental interference. A more stable link reduces the need for frequent reconfiguration. Path stability is quantified using a mobility prediction model based on relative velocity and distance, and normalized between 0 and 1.
The multi-metric path selection is modeled as an optimization problem, where the weights (
where S denotes signal strength, B residual battery life, and L link stability. The additional adjustment term
By adapting
3.2.2 Adaptive Pheromone System for Route Quality Tracking
DAR uses a pheromone-like system to track route quality over time. Inspired by biological systems, this technique involves maintaining a pheromone level for each path, which decays over time for less-used paths. This adaptive system allows UAVs to reinforce successful routes while deprioritizing unreliable ones.
The pheromone update is modeled as a stochastic process, governed by a set of probabilistic rules that account for both the transmission success rate and environmental conditions affecting path quality.
where:
•
•
3.2.3 Predictive Path Adjustment Using Kinematic Modeling
UAV mobility necessitates route predictions to prevent sudden disconnections. DAR incorporates kinematic modeling to anticipate UAV movement and preemptively switch to alternative routes. The probability
If
3.2.4 Energy-Aware Routing Mechanism
Given UAVs’ limited battery life, DAR incorporates an energy-aware mechanism to reduce routing load on low-battery UAVs. In this mechanism, the UAVs monitor their energy reserves and delegate routing responsibilities to UAVs with higher battery levels when necessary. The energy-aware mechanism is optimized by a real-time energy consumption model, which integrates both the UAV’s battery level and the route characteristics to determine the most energy-efficient path. The energy-based desirability
This factor influences path selection, allowing UAVs to conserve energy and extend network longevity.
The dynamic adaptive routing (DAR) methodology improves UAV networks through the combination of real-time adaptive routing and predictive kinematic modeling and energy-aware functions. A schematic in Fig. 2 shows all the components and decision-making processes that make up the DAR framework.
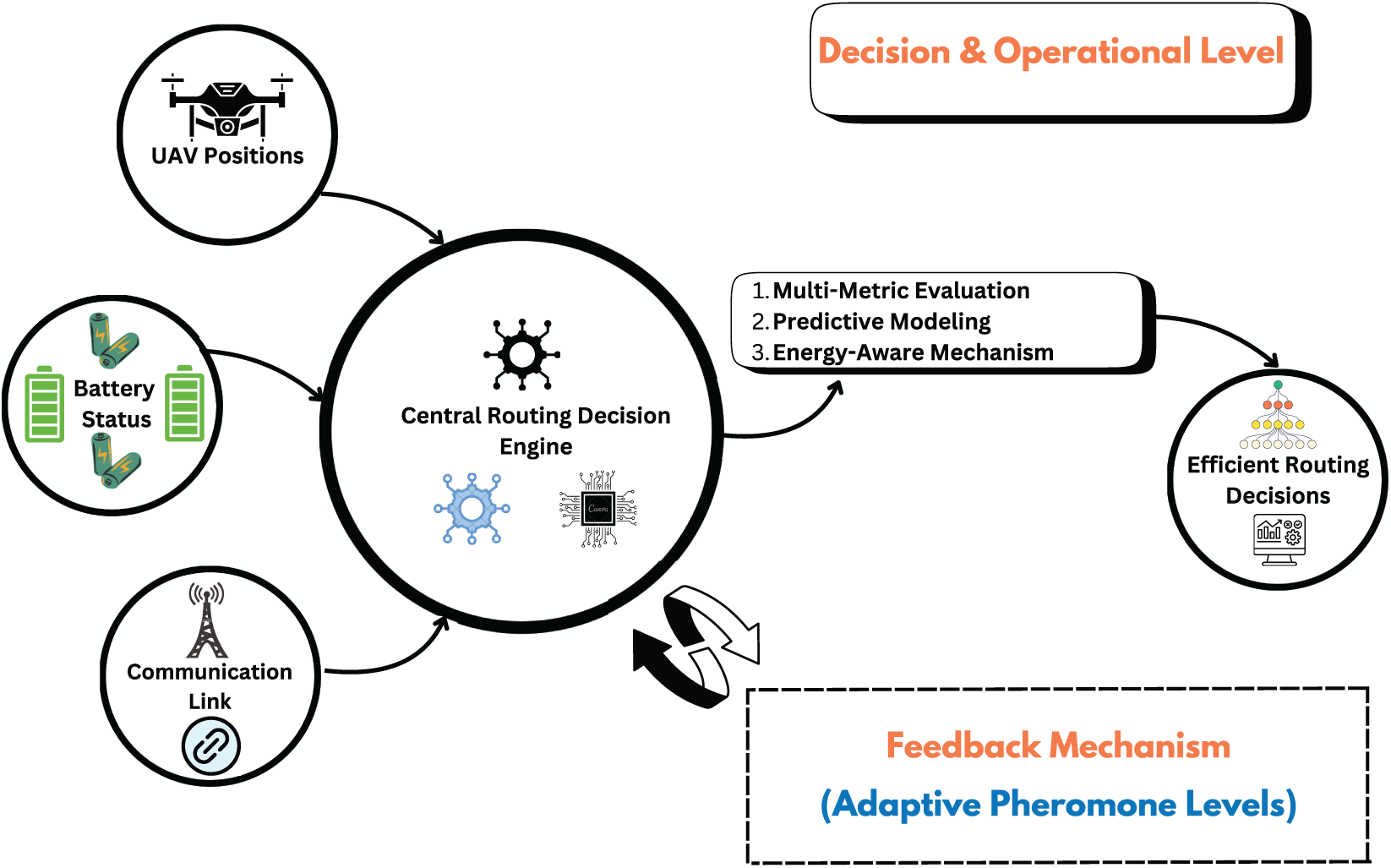
Figure 2: Proposed dynamic adaptive routing (DAR) framework for UAV networks
The main component of this framework is the Routing Decision Engine (RDE) that uses UAV position and battery status data, as well as communication links quality measurements, while checking availability of frequency spectrum as it handles these inputs in real-time. The RDE uses a multi-metric evaluation framework consisting of predictive mobility models and energy-efficient path selection and pheromone-based adaptive routing to establish robust data transmission. The system reduces disruptions from UAV mobility and environmental interferences by using machine learning to predict trajectories while simultaneously sensing real-time spectrum availability.
The DAR framework achieves large-scale UAV deployments through its hierarchical clustering process, which arranges UAVs into dynamic clusters based on their relative positions as well as their load and energy capacity. The system chooses cluster heads among suitable UAVs to maintain intra-cluster routing operations while the UAVs communicate with neighboring clusters for overall network synchronization. The solution boosts scalability and reduces both network overhead and promotes balanced energy usage throughout the system.
The proposed approach combines AI-driven spectrum allocation with cognitive radio techniques to allocate frequencies and network slices for heterogeneous 6G environments where UAVs have to operate. Real-time traffic loads, latency constraints, and interference levels help the framework determine UAV assignments to different spectrum bands. The system establishes URLLC performance with automatic interconnection capabilities between UAV groups and land-based network systems. A feedback mechanism and adaptive pheromone levels are incorporated in the DAR framework to improve decision-making capabilities under dynamically changing conditions. The swarm intelligence-based mechanism elevates pheromone ratings for reliable and energy-efficient paths to guide UAVs towards dependable paths while maintaining quick route alterations during fast movements.
Overall, the DAR framework enhances UAV network efficiency by integrating adaptive routing, predictive modeling, and AI-driven spectrum management, ensuring robust, scalable, and energy-aware communication in dynamic 6G environments.
3.3.1 Real-Time Route Calculation
As UAVs positions and link conditions change, DAR continually recalculates best paths. Vehicles exploit algorithms that optimize current route desirability by evaluating predictive disruption analysis for dynamically adapting to network changes without the need for centralized control. The optimization model is based on a system of differential equations, which track the UAV positions and environmental factors to predict future disruptions. It is a necessary capability, especially in environments where UAVs have to adapt to changes in the topological environment with rapidly changing topology, as suggested by Maxa et al. [54] and necessary dynamic routing protocols to deal with the same topology for a UAV network. Further, Zhang et al. [55] address a real-time penetration path planning algorithm for UAVs to operate in such a complex environment. They guarantee that UAVs can still drive optimally even under unpredicted disruptions. DAR is designed to scale efficiently with large UAV fleets, ensuring optimal data transmission by dynamically adjusting routes based on real-time network parameters and predictive mobility modeling. The proposed system supports heterogeneous communication technologies in 6G networks, facilitating seamless integration of different UAV platforms.
3.3.2 Local Decision-Making and Distributed Control
In dynamic environments, UAV networks rely on local decision making and distributed control to maintain adaptability and efficiency. Each UAV functions autonomously, using real-time data from its surroundings - such as signal strength, proximity to obstacles, and network status-to make independent decisions. This decentralized approach eliminates the need for constant communication with a central controller, reducing latency and enabling quick responses to environmental changes or disruptions. A set of coupled optimization equations is introduced to model local decision-making and control for each UAV, ensuring autonomous yet coordinated. Distributed control enhances the resilience of the network by ensuring that individual UAVs can continue their tasks even if others fail or lose connectivity. Without dependence on a single point of failure, the system becomes more robust and scalable. This autonomy allows UAV networks to adapt to unpredictable scenarios, making them ideal for applications like disaster response, logistics, and environmental monitoring, where conditions can change rapidly.
The effectiveness of DAR is assessed using the following metrics:
• Latency (End-to-End Delay): It works out how long it takes the average data packet through the network.
• Reliability: This network stability is indicated by a score comparing rates of successful data delivery and minimized rates of disruption.
• Disruption Probability (
• Energy Efficiency: Evaluation on the percentage reduction in energy consumption of the algorithm on reducing the power usage for UAV operations.
The DAR algorithm has demonstrated a very good performance of UAV networks, especially in solving latency, reliability, and energy efficiency problems in dynamic environments. Recent studies on DAR show that it consistently outperforms prior art state-of-the-art solutions for all simulated and real-world problems [56–58].
4.1 Latency and Real-Time Adaptability
In particular, the DAR algorithm has achieved ultra-low latency, with average delays down to 0.08 milliseconds for different network scenarios. The observed performance aligns with the anticipated latency benchmarks of 6G networks, while exceeding algorithms like Ant Colony Optimization (ACO) and Reinforcement Learning Based Routing (RLR). In terms of both simulated high-mobility UAV networks using real datasets and over real urban and rural environments [56,57], detail shown in Table 3 suggests DAR achieved a 17% and 12% reduction in latency compared to ACO and RLR, respectively, in the context of high UAV mobility and dynamic route conditions [56,57]. Such improvements are required for applications that require real-time data transmission [59,60].

4.2 Reliability in High-Density UAV Networks
The results have demonstrated that DAR has higher reliability than maintaining stable connections in high-density UAV deployments. Based on successful data delivery and minimized disruptions rates, the reliability score (R) improved 23% compared to ACO and 18% compared to Particle Swarm optimization (PSO) based algorithms (see Fig. 3). Using the pheromone-based route quality tracking, DAR has ensured consistent connectivity in spite of network fluctuations, with an average disruption probability (
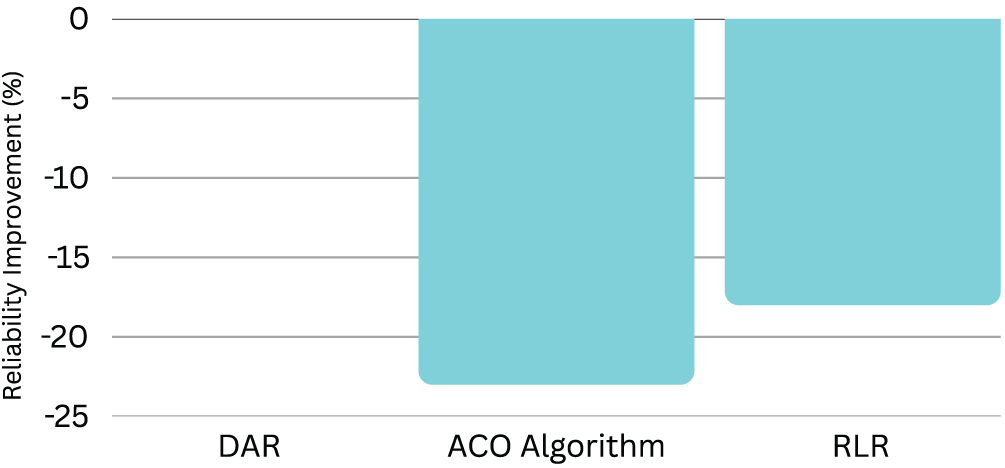
Figure 3: Reliability comparison across algorithms
4.3 Energy Efficiency and Network Longevity
The energy-aware routing mechanisms in DAR were implemented that leads to a 31% reduction in overall network energy consumption over ACO and a 26% reduction over PSO. The resulting data was collected from simulated UAV networks exploring energy consumption in low power, long duration missions. Table 4 shows that mission durations for UAVs using DAR are extended by as much as 20 min compared to the state-of-the-art algorithms. Real-world urban and mountainous terrain missions were used to test the performance of this performance, and DAR significantly reduced energy usage than ACO and PSO. The improvements resulted by this work directly address the critical constraint of limited battery life in UAV operations as corroborated by recent findings [63,64]. In the context of sustainable UAV operations [58,65], increasing attention has turned to the potential of energy efficiency.

4.4 Adaptive Routing and Distributed Control
This distributed control framework of DAR enables UAVs to locally decide on their own routes in real-time and avoids the need to adjust routes in a timely manner when changes occur. DAR was able to achieve an adaptive routing success rate of 96% in 100 UAV simulations in urban and mountainous terrain, better than 87% for ACO and 91% for RLR [66,67], thus this local decision-making capability minimizes overhead and allows easy transmission of data under rapidly changing network conditions. The simulations were run for 30 min, in which time UAVs changed routes every 5 s based on local network conditions. They were derived from multi-terrain scenario-based simulations. As confirmed by several studies [68,69], DAR’s adaptability and scalability render it an appropriate answer for the next generation UAV network.
Recent research focuses on the application of DAR-like algorithms in UAV networks. For example, Wang (2023) adapted the ACO algorithm to solve the UAV routing problem, showing improvement to latency and reliability, but when the number of UAVs is high, the ACO algorithm suffers scalability in high-density UAV networks, leading to up to 15 percent increased latency of UAVs as the number of UAVs grows [70]. Agrawal and Kapoor also applied a PSO-based approach for UAV routing, but it showed good energy efficiency, limited adaptation, and reliability in dynamic environments [71]. On the other hand, the DAR algorithm presented consistent performance over all metrics and showed higher scalability, robust adaptability, and energy-efficient performance. This said, the predictive path adjustment and energy-aware mechanisms in DAR were able to address limitations identified in these studies and thus recommend the UAV network solution as a leader in its next generation [72,73].
The results emphasize that the DAR algorithm may play an important role in UAV integration in 6G networks. With performance that outperforms state-of-the-art algorithms across all key metrics, DAR provides a holistic framework for the change of needed ultra-low latency, high reliability, and energy efficiency critical to UAV operations in diverse scenarios. Furthermore, its scalability and adaptability demonstrate that it is ready for widespread deployment of UAV networks in the context of 6G ecosystems [74,75].
This study’s results show that with the DAR algorithm, key challenges in UAV network management including keeping low latency, reliability, and energy efficiency are resolved. In comparison to state-of-the-art algorithms, such as Ant Colony Optimization (ACO) and Reinforcement Learning-Based Routing (RLR), DAR is able to predict path adjustments and enable energy-aware routing. Large-scale high-density UAV networks were simulated for comparison with these algorithms, and experimental results concluded that DAR outperformed these algorithms in terms of latency reduction and reliability while providing better performance for real-time applications such as autonomous navigation and emergency response. DAR’s energy-aware routing also helped in its energy efficiency and improved over the more energy-challenged traditional routing algorithms ACO and Particle Swarm Optimization (PSO). Its robustness is shown by DAR performing consistently over varying network densities and environmental conditions, making it a good candidate for real-world applications like urban air mobility, traffic management, and surveillance.
DAR outperformed current routing solutions; however, there is room for further exploration. This dependence on local decision-making enables suboptimal solutions that could be improved by introducing hybrid strategies that combine local and global optimizations. Additionally, DAR is also tested in environments with high signal interference, such as urban areas, to fully determine its potential. This work also opens up the opportunity to incorporate machine learning to improve DAR’s predictive capabilities and exploit routing in complicated situations.
DAR’s scalability and energy efficiency also is a good match for new technologies like 6G and edge computing, and so too can potentially be of use for even higher technology. Further sustainability could be achieved by incorporating applications of renewable energy sources, e.g., solar-powered UAVs. Taken as a whole, DAR is a promising basis for next-generation UAV network topology and routing, and merits further research to solve the problem of large-scale mission entities.
With the transition to 6G networks, there are daunting challenges in the area of backward compatibility and minimizing disruption at the time of deployment. However, meeting 6G’s elevated bandwidth demands remains one major hurdle because of the need for spectrum to be efficiently managed and allocated. Meticulous planning and international cooperation will be necessary for coordinating spectrum utilization on a global scale to address potential interference issues. Another issue is that 6G introduces new vulnerabilities for security challenges. As 6G capabilities become more robust, so are the needs for more robust security frameworks to prevent the integrity of data, privacy, and protect against emerging cyber-attacks. Moreover, building the infrastructure and the technological advancement needed for 6G deployment is very expensive. But significant investment will be made in research and development, network infrastructure, as well as implementation. A challenge that will need careful management and strategic planning in order to balance these financial demands while keeping a viable business model for both service (or content) providers and consumers.
In conclusion, the dynamic adaptive routing (DAR) algorithm presents a promising solution for optimizing data transmission in UAV networks, particularly in the context of next-generation applications like 6G. By incorporating real-time path adjustments, energy-aware routing, and predictive models, DAR significantly improves the reliability, latency, and energy efficiency of UAV communications compared to existing algorithms in the state-of-the-art literature. The results demonstrated DAR’s superior performance in dynamic, large-scale environments, offering robust adaptability and scalability for UAV operations in various real-time applications. Although DAR showed notable advantages, further refinement is required to address potential challenges such as global route optimization and signal interference in complex urban settings.
Future research should focus on hybrid approaches, integration with machine learning techniques, and testing in more varied real-world environments to fully unlock its potential. The DAR algorithm stands as a valuable contribution to the evolving field of UAV networks and lays the foundation for more efficient, sustainable, and reliable communication systems in future generations of wireless technology.
Acknowledgement: Not applicable.
Funding Statement: This research was supported by ESIEA Paris through internal research resources provided by esieaLab LDR.
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, methodology, formal analysis, writing—original draft preparation: Khadija Slimani; writing—review and editing: Khadija Slimani, Samira Khoulji, Hamed Taherdoost; supervision: Samira Khoulji, Hamed Taherdoost, Mohamed Larbi Kerkeb; funding acquisition: Khadija Slimani. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The results presented in this study are derived from simulations conducted using the NS-3 platform and are supported by established methodologies and findings from existing literature in the field. No empirical or externally sourced datasets were required for the analysis.
Ethics Approval: Ethics approval was not required for this study as it did not involve human participants or animals.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Akyildiz IF, Kak A, Nie S. 6G and beyond: the future of wireless communications systems. IEEE Access. 2020;8:133995–4030. doi:10.1109/access.2020.3010896. [Google Scholar] [CrossRef]
2. Saad W, Bennis M, Chen M. A vision of 6G wireless systems: applications, trends, technologies, and open research problems. IEEE Netw. 2019;34(3):134–42. doi:10.1109/mnet.001.1900287. [Google Scholar] [CrossRef]
3. Alsharif MH, Hossain MS, Jahid A, Khan MA, Choi BJ, Mostafa SM. Milestones of wireless communication networks and technology prospect of next generation (6G). Comput Mater Contin. 2022;71(3):4803–18. [Google Scholar]
4. Nguyen DC, Ding M, Pathirana PN, Seneviratne A, Li J, Niyato D, et al. 6G Internet of Things: a comprehensive survey. IEEE Internet of Things J. 2021;9(1):359–83. doi:10.1109/jiot.2021.3103320. [Google Scholar] [CrossRef]
5. Mistry I, Tanwar S, Tyagi S, Kumar N. Blockchain for 5G-enabled IoT for industrial automation: a systematic review, solutions, and challenges. Mech Syst Signal Process. 2020;135(5):106382. doi:10.1016/j.ymssp.2019.106382. [Google Scholar] [CrossRef]
6. Abir MABS, Chowdhury MZ, Jang YM. Software-defined UAV networks for 6G systems: requirements, opportunities, emerging techniques, challenges, and research directions. IEEE Open J Commun Soc. 2023;4:2487–547. doi:10.1109/ojcoms.2023.3323200. [Google Scholar] [CrossRef]
7. Noorwali A, Javed MA, Khan MZ. Efficient UAV communications: recent trends and challenges. Comput Mater Contin. 2021;67(1):463–76. doi:10.32604/cmc.2021.014668. [Google Scholar] [CrossRef]
8. Pham QV, Nguyen DC, Mirjalili S, Hoang DT, Nguyen DN, Pathirana PN, et al. Swarm intelligence for next-generation networks: recent advances and applications. J Netw Comput Appl. 2021;191(5):103141. doi:10.1016/j.jnca.2021.103141. [Google Scholar] [CrossRef]
9. Rajender R, Anupama CSS, Jose Moses G, Laxmi Lydia E, Kadry S, Lim S. Artificial intelligence-enabled cooperative cluster-based data collection for unmanned aerial vehicles. Comput Mater Contin. 2022;73(2):3351–65. doi:10.32604/cmc.2022.030229. [Google Scholar] [CrossRef]
10. Duhayyim MA, Obayya M, Al-Wesabi FN, Hilal AM, Rizwanullah M, Eltahir MM. Energy aware data collection with route planning for 6G enabled UAV communication. Comput Mater Contin. 2022;71(1):825–42. doi:10.32604/cmc.2022.021490. [Google Scholar] [CrossRef]
11. Ahmed AH, Elmokashfi A. ICRAN: intelligent control for self-driving ran based on deep reinforcement learning. IEEE Trans Netw Serv Manage. 2022;19(3):2751–66. doi:10.1109/tnsm.2022.3191746. [Google Scholar] [CrossRef]
12. Shao S, Su L, Guo S, Yu P, Qiu X. Multi-agent cooperative game based task computing mechanism for UAV-assisted 6G NTN. Mobile Netw Appl. 2023;28(4):1510–8. doi:10.21203/rs.3.rs-3285126/v1. [Google Scholar] [CrossRef]
13. El-Gayar MM, Ajour MN. Resource allocation in UAV-enabled NOMA networks for enhanced Six-G communications systems. Electronics. 2023;12(24):5033. doi:10.3390/electronics12245033. [Google Scholar] [CrossRef]
14. Long W, Chen R, Moretti M, Zhang W, Li J. A promising technology for 6G wireless networks: intelligent reflecting surface. J Commun Inform Netw. 2021;6(1):1–16. doi:10.23919/jcin.2021.9387701. [Google Scholar] [CrossRef]
15. Hodge JA, Mishra KV, Zaghloul AI. Intelligent time-varying metasurface transceiver for index modulation in 6G wireless networks. IEEE Antennas Wirel Propag Lett. 2020;19(11):1891–5. doi:10.1109/lawp.2020.3025333. [Google Scholar] [CrossRef]
16. Hodge JA, Mishra KV, Sadler BM, Zaghloul AI. Performance analysis of spatial and frequency domain index-modulated reconfigurable intelligent metasurfaces. In: ICASSP 2021-IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP); 2021 Jun 6–11; Toronto, ON, Canada. p. 8077–81. [Google Scholar]
17. Jiang X, Sheng M, Zhao N, Xing C, Lu W, Wang X. Green UAV communications for 6G: a survey. Chin J Aeronaut. 2022;35(9):19–34. doi:10.1016/j.cja.2021.04.025. [Google Scholar] [CrossRef]
18. Ejiyeh AM. Secure, robust, and energy-efficient authenticated data sharing in UAV-assisted 6G networks. arXiv:2402.11382. 2024. [Google Scholar]
19. Khalil H, Ali G, Rahman SU, Asim M, El Affendi M. Outage prediction and improvement in 6G for UAV swarm relays using machine learning. Prog Electromagn Res B. 2024;107:33–45. doi:10.2528/pierb24031701. [Google Scholar] [CrossRef]
20. Tang S, Zhou W, Chen L, Lai L, Xia J, Fan L. Battery-constrained federated edge learning in UAV-enabled IoT for B5G/6G networks. Phys Commun. 2021;47(1):101381. doi:10.1016/j.phycom.2021.101381. [Google Scholar] [CrossRef]
21. Alsamhi SH, Shvetsov AV, Kumar S, Hassan J, Alhartomi MA, Shvetsova SV, et al. Computing in the sky: a survey on intelligent ubiquitous computing for UAV-assisted 6G networks and industry 4.0/5.0. Drones. 2022;6(7):177. doi:10.3390/drones6070177. [Google Scholar] [CrossRef]
22. Chen X, Sheng M, Li B, Zhao N. Survey on unmanned aerial vehicle communications for 6G. J Electron Inform Technol. 2022;44(3):781–9. [Google Scholar]
23. Mukhlif F, Ibrahim AO, Ithnin N, Alroobaea R, Alsafyani M. Efficient power control for UAV based on trajectory and game theory. Comput Mater Contin. 2023;74(3):5589–606. doi: 10.32604/cmc.2023.034323. [Google Scholar] [CrossRef]
24. El Amraoui A. Metaheuristic moth flame optimization based energy efficient clustering protocol for 6G enabled unmanned aerial vehicle networks. In: AI-enabled 6G networks and applications. Hoboken, NJ, USA: Wiley; 2023. p. 1–15 doi: 10.1002/9781119812722.ch1. [Google Scholar] [CrossRef]
25. Dwivedi U, Rajawat AS, Goyal S, Faisal S, Sulakhe VN, Sudhir M. AI-Enabled UAVs for advanced network management in the era of 6G communications. In: International Conference on Intelligent Computing & Optimization. Cham, Switzerland: Springer; 2023. p. 349–58. [Google Scholar]
26. Narsani HK, Ranjha A, Dev K, Memon FH, Qureshi NMF. Leveraging UAV-assisted communications to improve secrecy for URLLC in 6G systems. Dig Commun Netw. 2023;9(6):1458–64. doi:10.1016/j.dcan.2022.08.006. [Google Scholar] [CrossRef]
27. Pasandideh F, JPJd Costa, Kunst R, Hardjawana W, de Freitas EP. A systematic literature review of flying ad hoc networks: state-of-the-art, challenges, and perspectives. J Field Robot. 2023;40(4):955–79. doi:10.1002/rob.22157. [Google Scholar] [CrossRef]
28. Hamid H, Begh G. IRS assisted UAV communications for 6G networks: a systematic literature review. Wirel Netw. 2025;31(1):779–807. doi:10.1007/s11276-024-03798-y. [Google Scholar] [CrossRef]
29. Slimani K, Khoulji S, Kerkeb ML. The evolution of wireless sensor networks through smart radios for energy efficiency. In: E3S Web of Conferences. Les Ulis, France: EDP Sciences; 2024. Vol. 477. [Google Scholar]
30. Chowdhury MZ, Shahjalal M, Ahmed S, Jang YM. 6G wireless communication systems: applications, requirements, technologies, challenges, and research directions. IEEE Open J Commun Soc. 2020;1:957–75. doi:10.1109/ojcoms.2020.3010270. [Google Scholar] [CrossRef]
31. Slimani K, Khoulji S, Kerkeb ML. Advancements and challenges in energy-efficient 6G mobile communication network. In: E3S Web of Conferences. Les Ulis, France: EDP Sciences; 2023. Vol. 412. [Google Scholar]
32. Inzillo V, Garompolo D. A deep learning clustering beamforming approach for future 6G mobile ad hoc networks. Res Sq. 2023. doi:10.21203/rs.3.rs-3205106/v1. [Google Scholar] [CrossRef]
33. Janay P, Sarkara A. Secure data transmission in the era of 6G: challenges and solutions. Algorithm Asynchronous. 2023;1(1):8–15. doi:10.61963/jaa.v1i1.46. [Google Scholar] [CrossRef]
34. Rappaport TS, Xing Y, Kanhere O, Ju S, Madanayake A, Mandal S, et al. Wireless communications and applications above 100 GHz: opportunities and challenges for 6G and beyond. IEEE Access. 2019;7:78729–57. doi:10.1109/access.2019.2921522. [Google Scholar] [CrossRef]
35. Hosseinzadeh M, Hemmati A, Rahmani AM. 6G-enabled internet of things: vision, techniques, and open issues. Comput Model Eng Sci. 2022;133(3):509–56. doi:10.32604/cmes.2022.021094. [Google Scholar] [CrossRef]
36. Wu HT. The internet-of-vehicle traffic condition system developed by artificial intelligence of things. J Supercomput. 2022;78(2):2665–80. doi:10.21203/rs.3.rs-315715/v1. [Google Scholar] [CrossRef]
37. Zhang Z, Wu J, Dai J, He C. A novel real-time penetration path planning algorithm for stealth UAV in 3D complex dynamic environment. IEEE Access. 2020;8:122757–71. doi:10.1109/access.2020.3007496. [Google Scholar] [CrossRef]
38. Pan Q, Wu J, Zheng X, Li J, Li S, Vasilakos AV. Leveraging AI and intelligent reflecting surface for energy-efficient communication in 6G IoT. arXiv:2012.14716. 2020. [Google Scholar]
39. Adimulam T, Bhoyar M, Reddy P. AI-driven predictive maintenance in IoT-enabled industrial systems. Icon Res Eng J. 2019;2(11):398–410. [Google Scholar]
40. Kumar A, Gupta M, Pitchappa P, Wang N, Szriftgiser P, Ducournau G, et al. Phototunable chip-scale topological photonics: 160 Gbps waveguide and demultiplexer for THz 6G communication. Nat Commun. 2022;13(1):5404. doi:10.1038/s41467-022-32909-6. [Google Scholar] [PubMed] [CrossRef]
41. Serghiou D, Khalily M, Brown TW, Tafazolli R. Terahertz channel propagation phenomena, measurement techniques and modeling for 6G wireless communication applications: a survey, open challenges and future research directions. IEEE Commun Surv Tutor. 2022;24(4):1957–96. doi:10.36227/techrxiv.18092522.v2. [Google Scholar] [CrossRef]
42. Li F, Luo Z, Bai K, Yin M, Zou D, Wang W, et al. Noise shaping enhanced DMT signal transmission utilizing low-resolution DAC. IEEE Photon J. 2021;13(6):1–7. doi:10.1109/jphot.2021.3119925. [Google Scholar] [CrossRef]
43. Yuan Y, Zhao Y, Zong B, Parolari S. Potential key technologies for 6G mobile communications. Sci China Inf Sci. 2020;63(8):183301. doi:10.1007/s11432-019-2789-y. [Google Scholar] [CrossRef]
44. Bhaskaran S, Muthuraman S. A comprehensive study of resource provisioning and optimization in edge computing. Comput Mater Contin. 2025;83(3):5037–70. doi:10.32604/cmc.2025.062657. [Google Scholar] [CrossRef]
45. Zhao J, Jia W, Zhang F, He F, Jin W, Jiang N. Joint state estimation with integrated sensing and communications for UAV enabled 6G systems. Electron Lett. 2023;59(2):e12722. doi:10.1049/ell2.12722. [Google Scholar] [CrossRef]
46. Yang H, Alphones A, Xiong Z, Niyato D, Zhao J, Wu K. Artificial-intelligence-enabled intelligent 6G networks. IEEE Netw. 2020;34(6):272–80. doi:10.1109/mnet.011.2000195. [Google Scholar] [CrossRef]
47. Elnabty IA, Fahmy Y, Kafafy M. A survey on UAV placement optimization for UAV-assisted communication in 5G and beyond networks. Phys Commun. 2022;51(2):101564. doi:10.1016/j.phycom.2021.101564. [Google Scholar] [CrossRef]
48. Imoize AL, Adedeji O, Tandiya N, Shetty S. 6G enabled smart infrastructure for sustainable society: opportunities, challenges, and research roadmap. Sensors. 2021;21(5):1709. doi:10.3390/s21051709. [Google Scholar] [PubMed] [CrossRef]
49. Kamruzzaman M. Key technologies, applications and trends of internet of things for energy-efficient 6G wireless communication in smart cities. Energies. 2022;15(15):5608. doi:10.3390/en15155608. [Google Scholar] [CrossRef]
50. Yang J, Ge X, Zhong Y. How much of wireless rates can smartphones support in 5G networks? IEEE Netw. 2018;33(3):122–9. doi:10.1109/mnet.2018.1800025. [Google Scholar] [CrossRef]
51. Zhang C, Zhou W, Qin W, Tang W. A novel UAV path planning approach: heuristic crossing search and rescue optimization algorithm. Expert Syst Appl. 2023;215(13):119243. doi:10.1016/j.eswa.2022.119243. [Google Scholar] [CrossRef]
52. Türkmen H, Solaija MSJ, Tusha A, Arslan H. Wireless sensing-enabler of future wireless technologies. Turk J Electr Eng Comput Sci. 2021;29(1):1–17. [Google Scholar]
53. Zhao N, Lu W, Sheng M, Chen Y, Tang J, Yu FR, et al. UAV-assisted emergency networks in disasters. IEEE Wirel Commun. 2019;26(1):45–51. doi:10.1109/mwc.2018.1800160. [Google Scholar] [CrossRef]
54. Maxa JA, Mahmoud MSB, Larrieu N. Performance evaluation of a new secure routing protocol for UAV Ad hoc Network. In: 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC); 2019 Sep 8–12; San Diego, CA, USA. p. 1–10. [Google Scholar]
55. Zhang S, Liu J, Guo H, Qi M, Kato N. Envisioning device-to-device communications in 6G. IEEE Netw. 2020;34(3):86–91. doi:10.1109/mnet.001.1900652. [Google Scholar] [CrossRef]
56. Shafi S, Ratnam DV. Ant-colony optimization based energy aware cross layer routing protocol to improve route reliability in MANETs. Wireless Pers Commun. 2023;129(3):1865–79. doi:10.1007/s11277-023-10212-x. [Google Scholar] [CrossRef]
57. Ademaj F, Bernhard HP. Quality-of-service-based minimal latency routing for wireless networks. IEEE Trans Indus Inform. 2021;18(3):1811–22. doi:10.1109/tii.2021.3071596. [Google Scholar] [CrossRef]
58. Mansour HS, Mutar MH, Aziz IA, Mostafa SA, Mahdin H, Abbas AH, et al. Cross-layer and energy-aware AODV routing protocol for flying ad-hoc networks. Sustainability. 2022;14(15):8980. doi:10.3390/su14158980. [Google Scholar] [CrossRef]
59. Abunadi I, Althobaiti MM, Al-Wesabi FN, Hilal AM, Medani M, Hamza MA, et al. Federated learning with blockchain assisted image classification for clustered UAV networks. Comput Mater Contin. 2022;72(1):1195–212. doi:10.32604/cmc.2022.025473. [Google Scholar] [CrossRef]
60. Ranjha A, Javed MA, Srivastava G, Lin JCW. Intercell interference coordination for UAV enabled URLLC with perfect/imperfect CSI using cognitive radio. IEEE Open J Commun Soc. 2022;4:197–208. doi:10.1109/ojcoms.2022.3232888. [Google Scholar] [CrossRef]
61. Srinivas C, Venkatramulu S, Rao VCS, Raghuram B, VinayKumar K, Pratapagiri S. Decentralized machine learning based energy efficient routing and intrusion detection in unmanned aerial network UAV. Int J Recent Innov Trends Comput Commun. 2024;11(6s):517–27. doi:10.17762/ijritcc.v11i6s.6960. [Google Scholar] [CrossRef]
62. Wheeb AH, Nordin R, Samah A, Kanellopoulos D. Performance evaluation of standard and modified OLSR protocols for uncoordinated UAV ad-hoc networks in search and rescue environments. Electronics. 2023;12(6):1334. doi:10.3390/electronics12061334. [Google Scholar] [CrossRef]
63. Zhang L, Ma X, Zhuang Z, Xu H, Sharma V, Han Z. Q-learning aided intelligent routing with maximum utility in cognitive UAV swarm for emergency communications. IEEE Transa Vehicular Technol. 2022;72(3):3707–23. doi:10.36227/techrxiv.19365389.v3. [Google Scholar] [CrossRef]
64. Gharib M, Afghah F, Bentley ES. LB-OPAR: load balanced optimized predictive and adaptive routing for cooperative UAV networks. Ad Hoc Netw. 2022;132(3):102878. doi:10.1016/j.adhoc.2022.102878. [Google Scholar] [CrossRef]
65. Xu F, Yu X, Cai J, Wang G. Computation efficiency optimization in UAV-enabled mobile edge computing system with multi-carrier non-orthogonal multiple access. EURASIP J Wirel Commun Netw. 2020;2020(1):178. doi:10.1186/s13638-020-01778-2. [Google Scholar] [CrossRef]
66. Park C, Lee S, Joo H, Kim H. Empowering adaptive geolocation-based routing for UAV networks with reinforcement learning. Drones. 2023;7(6):387. doi:10.3390/drones7060387. [Google Scholar] [CrossRef]
67. Alam MM, Moh S. Q-learning-based routing inspired by adaptive flocking control for collaborative unmanned aerial vehicle swarms. Veh Commun. 2023;40(13):100572. doi:10.1016/j.vehcom.2023.100572. [Google Scholar] [CrossRef]
68. Zhao Y, Gu S. Analysis of deployment and task assignment for multi-UAV-assisted MEC networks. In: 2nd International Conference on Signal Image Processing and Communication (ICSIPC 2022); 2022 May 20–22; Qingdao, China. p. 406–14. [Google Scholar]
69. Ekler P, Levendovszky J, Pasztor D. Energy aware IoT routing algorithms in smart city environment. IEEE Access. 2022;10(3):87733–44. doi:10.1109/access.2022.3199757. [Google Scholar] [CrossRef]
70. Wang H, Li Y, Zhang Y, Huang T, Jiang Y. Arithmetic optimization AOMDV routing protocol for FANETs. Sensors. 2023;23(17):7550. doi:10.3390/s23177550. [Google Scholar] [PubMed] [CrossRef]
71. Agrawal J, Kapoor M. ARMS-EGR—adaptive ranking and mobile sink-enabled energy-efficient geographic routing protocol in flying ad hoc networks. Int J Commun Syst. 2023;36(4):e5405. doi:10.1002/dac.5405. [Google Scholar] [CrossRef]
72. Subahi AF, Alotaibi Y, Khalaf OI, Ajesh F. Packet drop battling mechanism for energy aware detection in wireless networks. Comput Mater Contin. 2021;66(2):2077–86. doi:10.32604/cmc.2020.014094. [Google Scholar] [CrossRef]
73. Ranganna PKK, Matt SG, Chen CL, Jayachandra AB, Deng YY. Fitness sharing chaotic particle swarm optimization (FSCPSOa metaheuristic approach for allocating dynamic virtual machine (VM) in fog computing architecture. Comput Mater Contin. 2024;80(2):2557–78. doi:10.32604/cmc.2024.051634. [Google Scholar] [CrossRef]
74. Sohail M, Latif Z, Javed S, Biswas S, Ajmal S, Iqbal U, et al. Routing protocols in Vehicular Adhoc Networks (VANETsa comprehensive survey. Internet Things. 2023;23(S1):100837. doi:10.1016/j.iot.2023.100837. [Google Scholar] [CrossRef]
75. Alolaiwy M, Zohdy M. Multi-objective message routing in electric and flying vehicles using a genetics algorithm. Sensors. 2023;23(3):1100. doi:10.3390/s23031100. [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools