
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Development of Wave Water Simulator for Path Planning of Autonomous Robots in Constrained Environments
1 Department of Mechanical Engineering, Faculty of Engineering, University of Malaya, Kuala Lumpur, Malaysia
2 Department of Mechanical Engineering, Tsinghua University, Beijing, China
3 School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou, China
4 Mechanical and Industrial Engineering Department, Abu Dhabi University, Zayed City, Abu Dhabi, United Arab Emirates
* Corresponding Author: Mohammed A. H. Ali. Email:
Computers, Materials & Continua 2026, 87(1), 100 https://doi.org/10.32604/cmc.2026.065539
Received 15 March 2025; Accepted 29 May 2025; Issue published 10 February 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Most existing path planning approaches rely on discrete expansions or localized heuristics that can lead to extended re-planning, inefficient detours, and limited adaptability to complex obstacle distributions. These issues are particularly pronounced when navigating cluttered or large-scale environments that demand both global coverage and smooth trajectory generation. To address these challenges, this paper proposes a Wave Water Simulator (WWS) algorithm, leveraging a physically motivated wave equation to achieve inherently smooth, globally consistent path planning. In WWS, wavefront expansions naturally identify safe corridors while seamlessly avoiding local minima, and selective corridor focusing reduces computational overhead in large or dense maps. Comprehensive simulations and real-world validations—encompassing both indoor and outdoor scenarios—demonstrate that WWS reduces path length by 2%–13% compared to conventional methods, while preserving gentle curvature and robust obstacle clearance. Furthermore, WWS requires minimal parameter tuning across diverse domains, underscoring its broad applicability to warehouse robotics, field operations, and autonomous service vehicles. These findings confirm that the proposed wave-based framework not only bridges the gap between local heuristics and global coverage but also sets a promising direction for future extensions toward dynamic obstacle scenarios and multi-agent coordination.Keywords
Robotic path planning is pivotal in modern applications such as warehouse logistics, disaster relief, and autonomous exploration. Its rapid evolution enables robots to navigate complex, cluttered, and uncertain environments effectively, thereby enhancing operational efficiency and safety [1–4]. However, the harsh and cluttered conditions in these operational domains often lead to planning failures, suboptimal navigation, or even collisions. Therefore, robust and efficient path planning methods are vital for ensuring safe, stable, and high-performance operations, particularly in scenarios where time-sensitive and precise navigation is critical.
Classical path planning approaches can be broadly categorized into graph-based algorithms, sampling-based algorithms, and reactive/potential-field methods [5,6]. Graph search algorithms like Dijkstra’s and A* guarantee optimal paths on discrete grids and have been widely used in robotic navigation [7,8]. However, their solutions are tied to the grid resolution and discrete motion steps; thus the resulting paths may be suboptimal or geometrically jagged when executed in a continuous world. Moreover, such deterministic searches become computationally expensive as the state space grows in dimension (for example, when incorporating a robot’s orientation or other dynamic factors) [9,10]. On the other hand, sampling-based planners such as Rapidly exploring Random Trees (RRT) and Probabilistic Roadmaps (PRM) offer better scalability in high-dimensional or continuous spaces by exploring the environment through random sampling [11,12]. Artificial Potential Fields (APF), despite their computational simplicity, risk local minima in complex obstacle distributions [5,6], whereas Jump Point Search (JPS) accelerates grid-based searches through directional pruning but still inherits the underlying “staircase” nature of grid expansions [13]. These methods can find paths where grid-based methods struggle, but they often suffer from the well-known “narrow passage” problem, requiring extensive samples to navigate tight gaps [14]. Meanwhile, reactive methods like artificial potential fields allow fast real-time responses by treating the goal as an attractive force and obstacles as repelling forces. Such potential-field planners are computationally light, yet they are notorious for getting stuck in local minima when only local information is considered [15]. These limitations highlight the need for planning strategies that combine global search thoroughness with the ability to handle confined geometries.
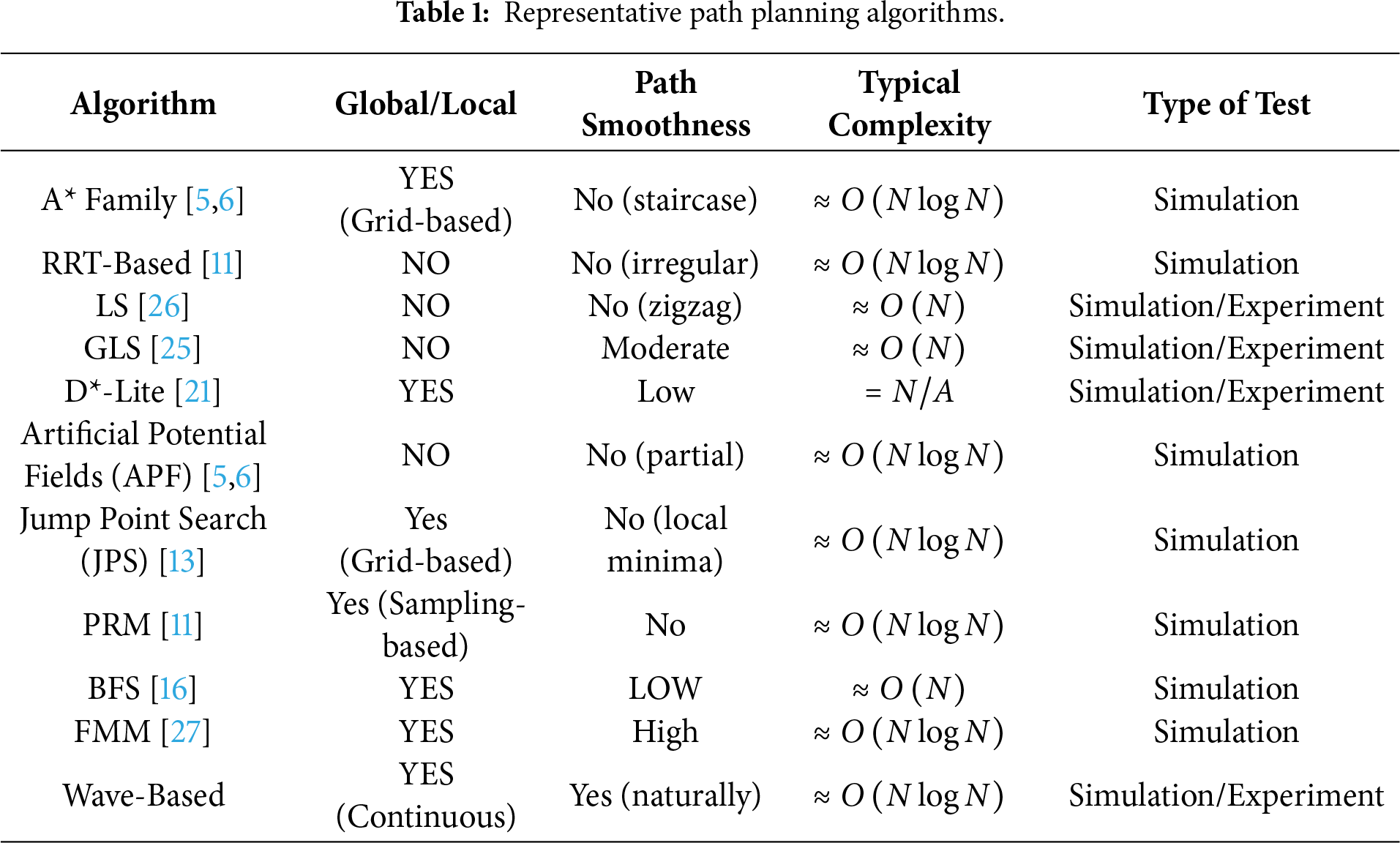
To overcome the above shortcomings, researchers have turned to wave-propagation algorithms that ensure a more global and exhaustive search of the environment. The classic wavefront (brushfire) algorithm floods the space from the start (or goal) like a BFS, ensuring all free cells are reached in increasing distance order [16]. This guarantee finding the shortest path (for uniform costs) and avoids the local minima issues of gradient-based methods. The resulting paths, however, follow the grid geometry—often involving Manhattan-like turns—and may hug obstacle boundaries (yielding low clearance). A prominent example is the Fast Marching Method (FMM), an algorithm that treats path planning as an Eikonal equation problem and efficiently computes the arrival time of a wavefront spreading across the map [17]. In robotics, FMM has been used to compute smooth, near-optimal paths on occupancy grids by simulating the expansion of a wave from the start position until it reaches the goal [18–20]. This approach shares similarities with Dijkstra’s algorithm in the way it incrementally expands a frontier, but unlike Dijkstra’s purely grid-based costs, FMM solves for continuous cost accumulations (distances or travel times) via the Eikonal update, yielding a path that is not constrained by grid direction biases moreover, because the wavefront propagation in FMM guarantees the minimal-time path before any clearance weighting; additional bias may deviate from that optimum [7,21]. Numerous works have built upon FMM’s foundation—for instance, the Fast Marching Square (FMS) variant runs FMM twice (first to create a repulsive potential field around obstacles, and second to plan on that modified cost map), resulting in paths that keep a safer clearance from obstacles [22]. By contrast, local or heuristic-driven methods—including Laser Simulator (LS) and distance-transform-based Generalized Laser Simulator (GLS)—expand incrementally and maintain agility in sparse or partially known settings [23–25]. These developments demonstrate the versatility and effectiveness of wave-based planning approaches, although they may introduce additional parameters (such as weightings for the repulsive field in FMS) that require careful tuning for different environments. Table 1 provides an overview of major path planning algorithms, contrasting their nature, path quality, typical evaluation method, complexity, and key characteristics in context. Although these existing path planning solutions have significantly advanced robotic navigation, they still face key limitations in real-world environments.
1. Limited Smoothness and Susceptibility to Local Minima: Discrete search methods often yield angular or piecewise-linear paths, whereas purely heuristic approaches may be trapped by complex obstacle configurations.
2. High Computational Overhead: Full-map searches can quickly become computationally expensive in large or cluttered domains, hindering real-time deployment.
3. Inadequate Obstacle Clearance: Routes that lack built-in clearance margins risk collisions under sensor or actuation uncertainty, especially in narrow corridors.
4. Weak Generalizability: Many methods require domain-specific heuristics or tuning for best performance, limiting adaptability across diverse application scenarios.
In contemporary path-planning research, most algorithms address fundamental objectives such as minimizing travel distance
While extensive literature exists for (
To address these issues, this paper presents the Wave Water Simulator (WWS) algorithm—a novel path planning approach with an emphasis on global wave propagation, corridor-restricted coverage, and parameter robustness. Unlike FMM’s purely mathematical wavefront propagation on a cost grid, WWS draws inspiration from physical water waves to simulate the spread of a wavefront through the robot’s environment. Starting at the robot’s initial position, the WWS algorithm releases a virtual “water wave” that expands outward across all traversable space until the goal is reached, analogous to water flooding through the free areas. This global wave propagation ensures that the search does not miss any viable routes: all potential paths are explored simultaneously as the wave permeates every accessible region of the map. Consequently, WWS naturally avoids pitfalls like dead-end traps or local minima that can confound local planners, since the wave will continue to flow around obstacles and through every navigable opening until it eventually reaches the target (guaranteeing completeness of the search). The main contributions of this paper can be summarized as follows:
1. Wave equation-based global coverage: By simulating a continuous wave expansion from the start node, WWS ensures that reachable free spaces are coherently encoded in a single global arrival-time map, reducing the risk of local minima.
2. Enhanced smoothness and clearance: The wavefront naturally “bends” around obstacles, avoiding abrupt directional shifts common in discrete planners. The resulting trajectories exhibit gentle curvature, facilitating safer and more energy-efficient robot motion.
3. A wave-based path planning model is established based on WWS, seamlessly integrating geometry
4. Broad applicability: Through extensive simulations and real-world tests in both indoor labs and outdoor terrains, WWS has demonstrated robust performance across diverse obstacle densities and map sizes, obviating the need for ad hoc parameter tuning in different scenarios.
This paper is structured as follows. Section 2 details the proposed analytical wave model and its path planning formulation. Section 3 describes implementation details and validates the algorithm in simple and complex simulation scenarios and demonstrates indoor and outdoor experiments. Section 4 summarizes the main conclusions of the study.
This section introduces the analytical two-dimensional wave equation and demonstrates how its solution underpins the proposed Wave Water Simulator (WWS). The goal is to highlight how continuous wave propagation creates a global arrival-time map that, in turn, guides path construction around static obstacles.
2.1 The Principle of Wave Water Simulator
A novel wave-based path planning framework is proposed, with its flowchart shown in Fig. 1. This framework leverages a continuous wave expansion to reveal global navigability and efficiently extract collision-free routes. First, the environment map is generated or loaded, marking obstacles and free cells. Next, a selective corridor is optionally applied to constrain wave expansions, reducing computation in large or cluttered domains. Then, the wave equation is used to derive arrival times across the corridor, reflecting each cell’s accessibility from the start node. Finally, a backtracking stage applies a cost function to preserve clearance while extracting a smooth, feasible path. This wave-centric design naturally encodes corridor effects and obstacle boundaries, producing globally consistent trajectories without relying on incremental re-planning.
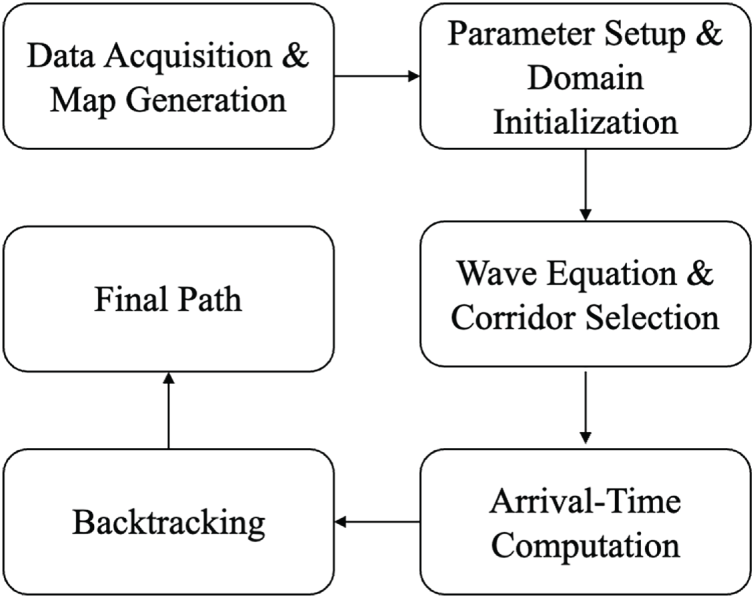
Figure 1: Overall framework for proposed Wave Water Simulator (WWS).
The Wave Water Simulator (WWS) algorithm applies the concept of wave expansion to path planning by continuously propagating a simulated wavefront from the robot’s initial position throughout the environment. As the wave evolves outward, it implicitly explores all reachable areas, indicating how a robot could navigate from the start to a goal. This wave-centric perspective avoids the pitfalls of purely heuristic methods, naturally bypassing local minima and covering the free space in an unbiased manner.
As shown in Fig. 2a, The Wave Water Simulator (WWS) algorithm applies an analytical two-dimensional wave equation to model path planning as a physical wave expansion from the robot’s start position. As the wavefront propagates outward, Dirichlet boundary conditions (
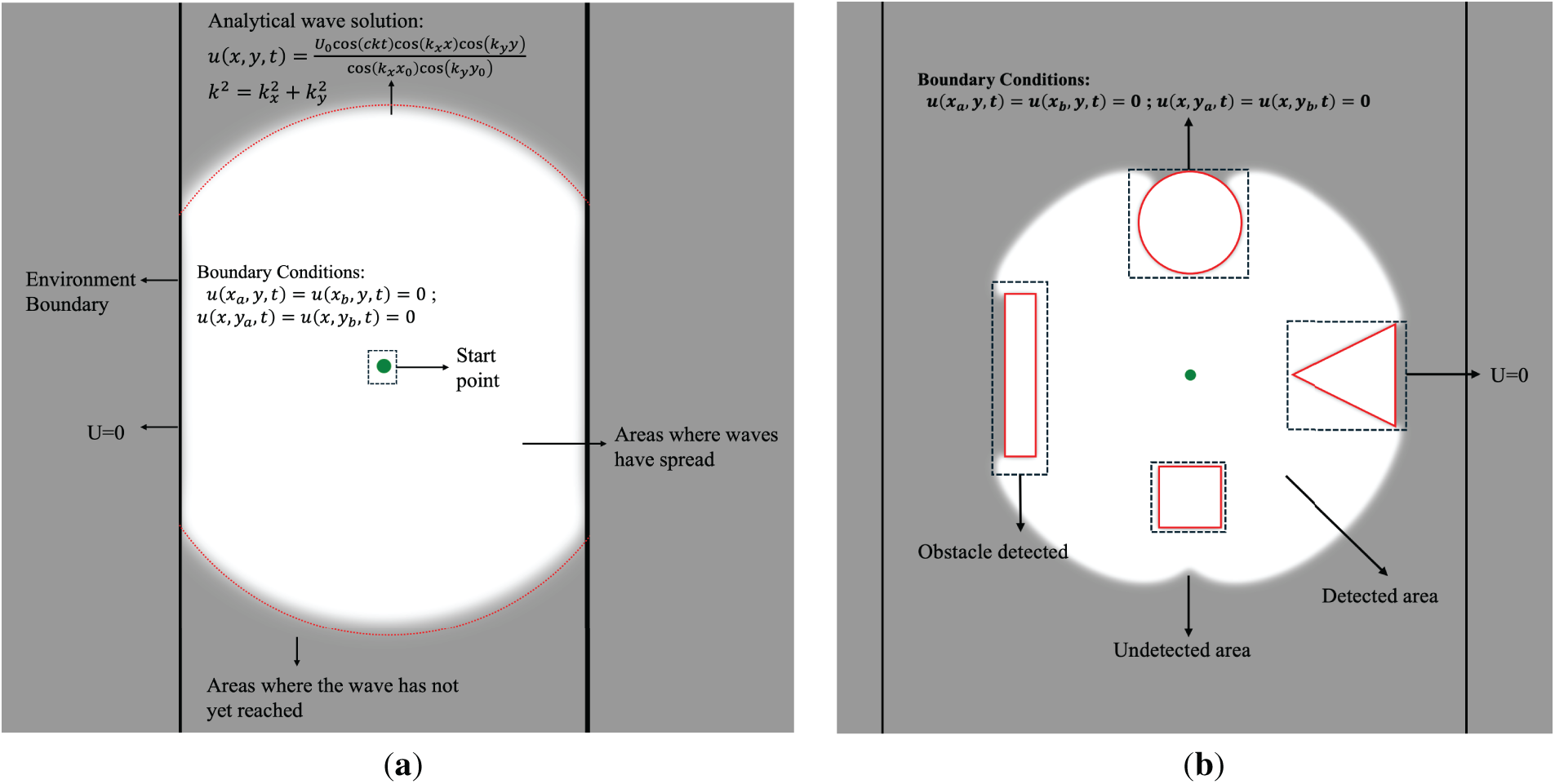
Figure 2: The principal Wave Water simulator (a) WWS spread, and boundary detect (b) WWS obstacle detection.
Fig. 2b illustrates how boundary conditions are applied in the Wave Water Simulator (WWS). Obstacles (the circular, rectangular, and triangular shapes) and the domain periphery are treated as zero-amplitude boundaries, effectively “absorbing” or blocking the wave. In the depicted scenario, the analytical solution for the two-dimensional wave equation expands smoothly from the robot’s initial position (green dot) through free space (white region), yet remains strictly confined by obstacles and outer walls. Because these boundaries enforce
2.2 Wave Equation Fundamentals
2.2.1 PDE-Based Wave Propagation
The two-dimensional wave equation is a well-known partial differential equation (PDE) that describes wave propagation in continuous media. In a homogeneous, bounded domain
where
Assuming the environment is bounded within
At
Assume
Introducing another constant
For path planning, an analytical solution of the above PDE provides the temporal evolution of wave within
where
Obstacles are inserted as additional boundaries, effectively zeroing out wave amplitude in those regions. Arrival times
When implementing numerical methods to solve the wave equation, it is essential to ensure numerical stability. The Courant-Friedrichs-Lewy (CFL) condition provides a criterion for stability in finite difference methods:
where
2.2.2 Wave Coverage and Arrival-Time Mapping
The solution in (2) provides a continuous depiction of how the wave expands from
This mapping captures global accessibility: areas near
Fig. 3a illustrates how the total area “covered” by the propagating wave evolves over continuous time according to the analytical two-dimensional wave solution. At
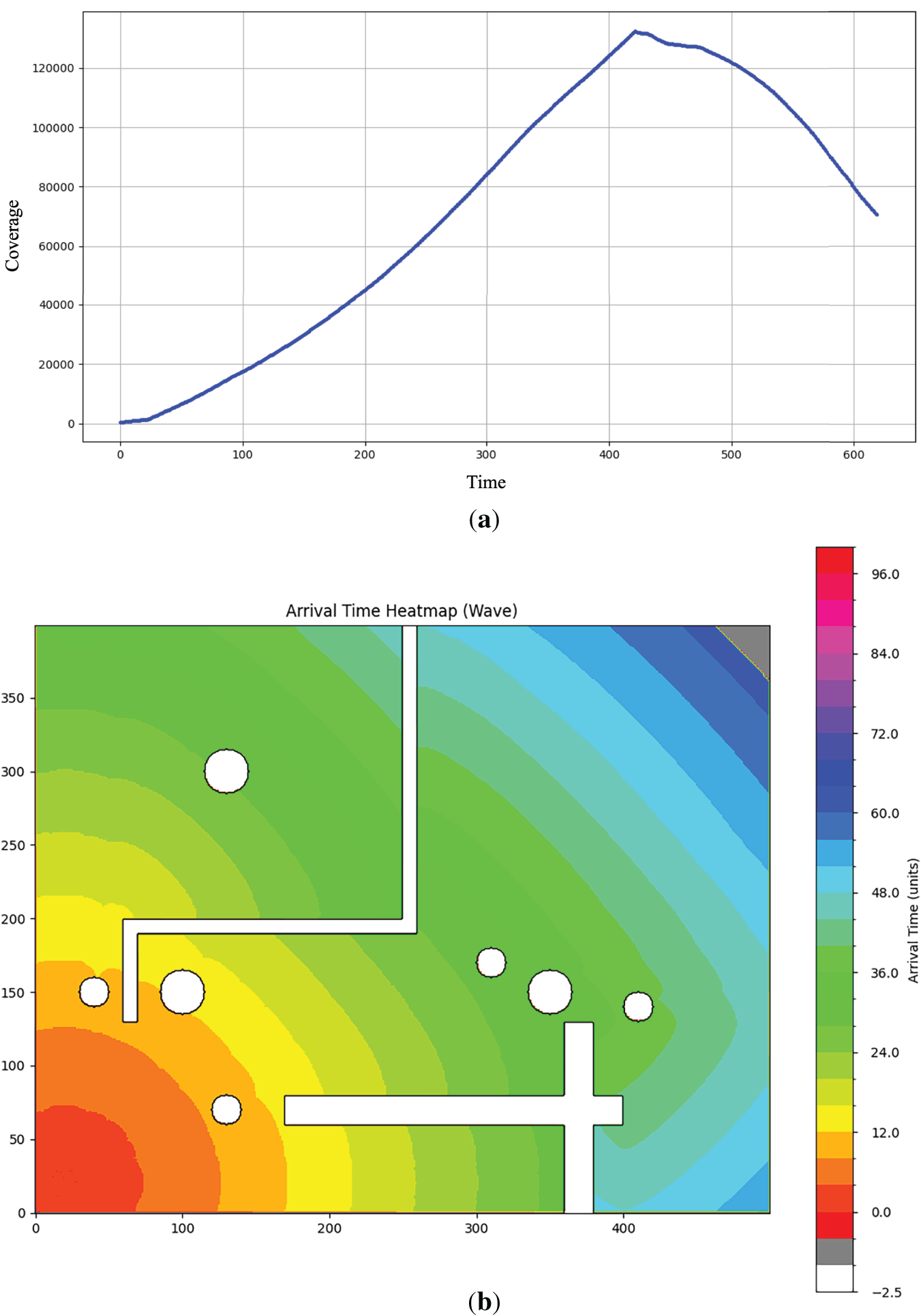
Figure 3: WWS spread illustration, (a) Wave coverage curve, (b) Arrive time heat map.
Fig. 3b offers a complementary arrival-time heatmap, again derived from the closed-form wave function. For each point
This time map provides crucial information about the earliest time the influence from the starting point reaches any given location, which is instrumental in the subsequent path planning stages.
Once
Ensuring that the path moves “upstream” toward the wave source. However, it is often beneficial to incorporate a cost function that penalizes obstacle proximity, ensuring safer navigation. Let
where:
During backtracking, each cell’s neighbor set may include 8 adjacent positions. The path candidate
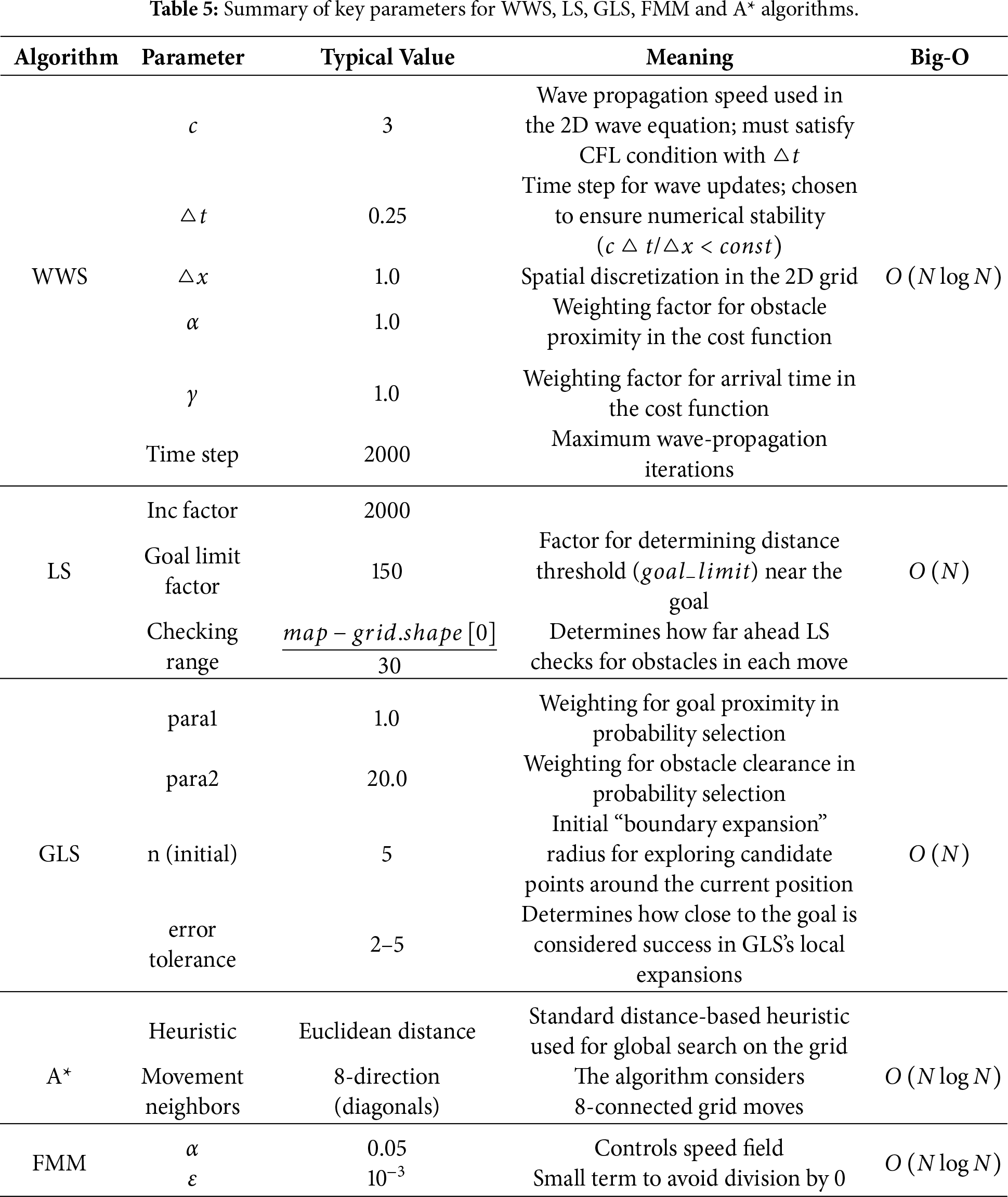
WWS requires a few critical parameters. The wave speed
A summary of these main parameters and constraints appears in Table 2. Full derivations are readily found in standard references on wave phenomena, so this section only highlights key points relevant to the wave-based laser simulator proposed in this work.
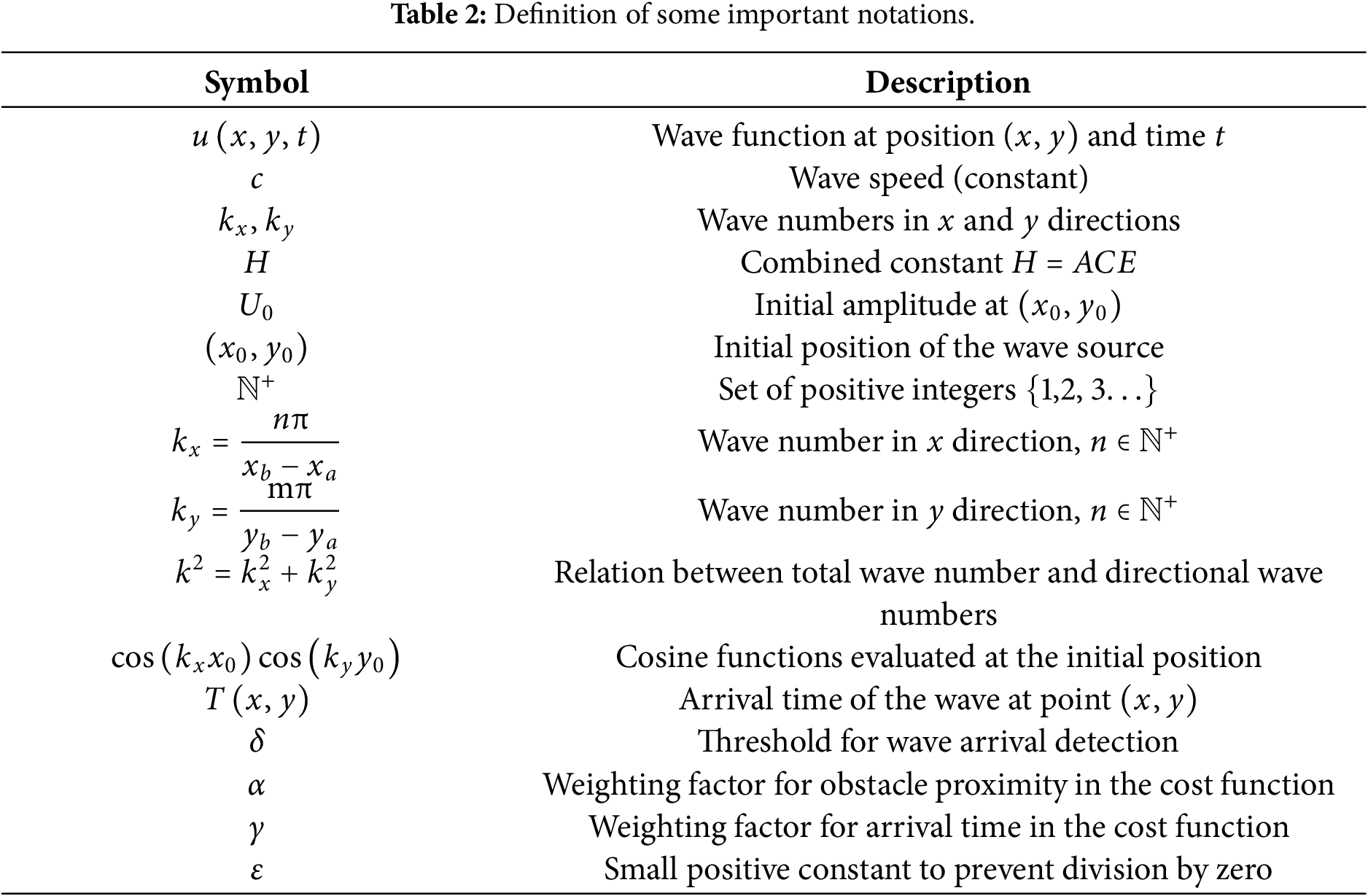
In this work, the parameters—wave speed c, threshold δ, and cost-function weights α, γ—are maintained as fixed values across all experiments, both indoors and outdoors. This non-adaptive choice was guided by preliminary trials indicating that a single parameter set could provide robust performance in a variety of environments. While this approach does not automatically adjust to factors such as map scale or obstacle density, the global nature of wave expansions in WWS enables it to accommodate moderate variations without specialized tuning. We emphasize that the current study aims to demonstrate the general feasibility and effectiveness of WWS under a single, empirically chosen configuration. Nonetheless, we acknowledge that certain advanced applications—especially those with highly dynamic or drastically varying obstacle layouts—may benefit from online parameter adaptation, a direction we outline in the Conclusion.
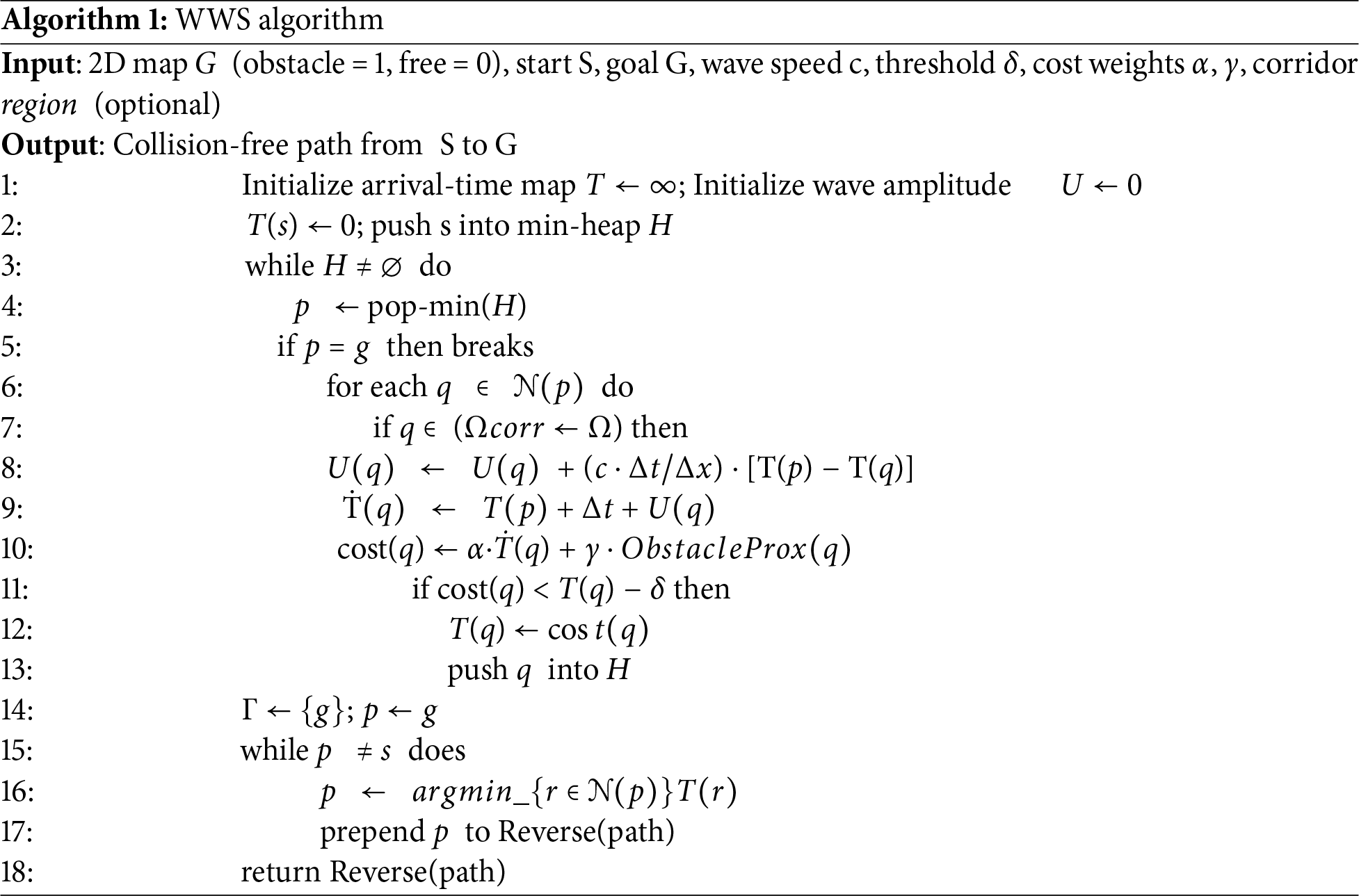
Algorithm 1 is the pseudo-code illustrating the key steps of the WWS approach under an analytical wavefront framework. It begins by defining the spatial domain and obstacle/boundary conditions, then computes the arrival-time
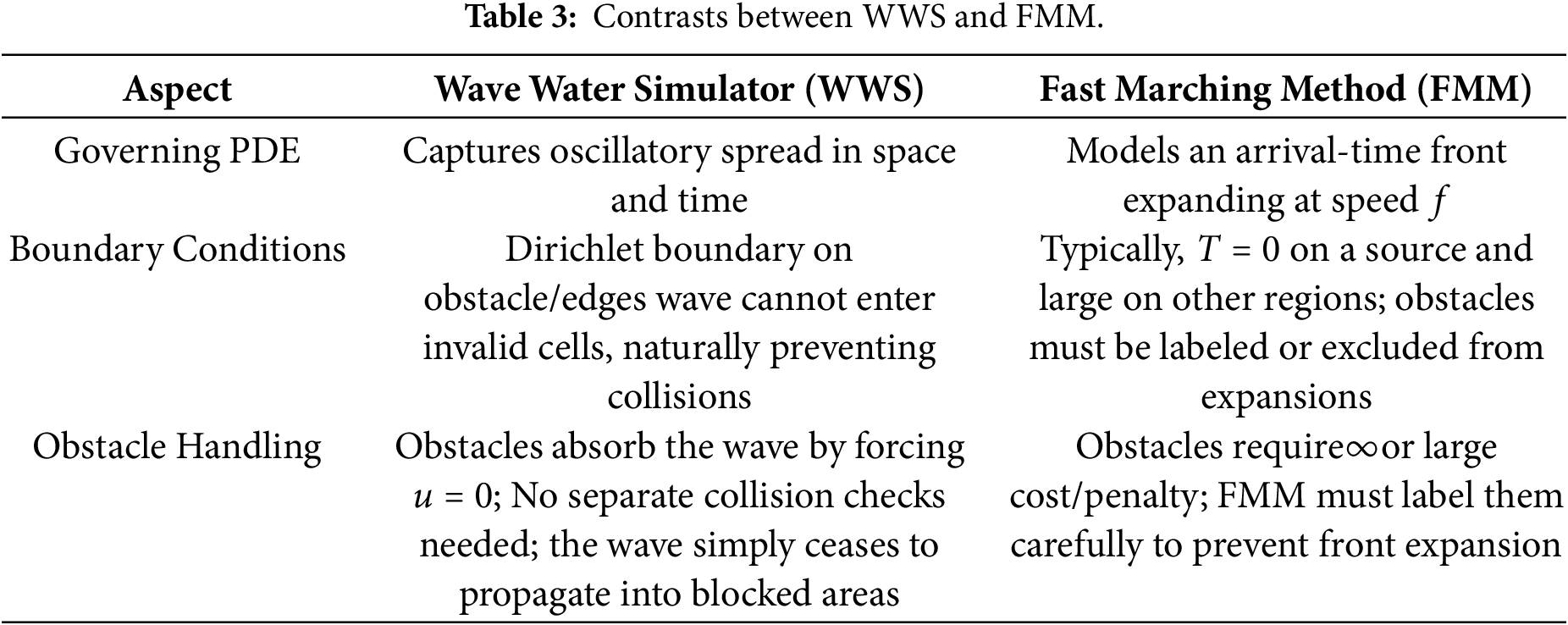
Comparison with FMM and Eikonal-Based Methods
While the wave equation underpins our Wave Water Simulator (WWS), many path planning techniques rely on the Eikonal equation,
By contrast, WWS leverages the second-order wave equation:
Together with Dirichlet boundary conditions
2.2.4 Optimality and Complexity of WWS
Wave Water Simulator (WWS) adopts wave propagation akin to PDE-based planners such as FMM, it does not strictly solve the stationary Eikonal equation
While the Wave Water Simulator (WWS) also propagates a wavefront, it employs a binary-heap scheduler that always processes the cell with the smallest arrival time. Let Ω contain N free cells. Every cell enters the heap at most once and up to k (≤8) neighbors are relaxed, giving:
If the optional corridor restriction reduces the working set from N to R cells (R ≪ N in cluttered. maps), the bound becomes
3.1 WWS Simulation Results Analysis
3.1.1 WWS in Simple Environment
To demonstrate the core principles of WWS, we first consider a simple 2D domain containing a single rectangular obstacle (Fig. 4). The start point (green) is placed near the lower-left corner, with the goal (red) in the upper-right region. Initially, no precomputed roadmap or heuristic is used—WWS merely propagates a wavefront from the start. As the wave expands, arrival-time contours naturally bend around the obstacle, revealing both safe corridors and areas of higher traversal cost. This obstacle interaction emerges directly from the boundary conditions, which without additional collision checks.
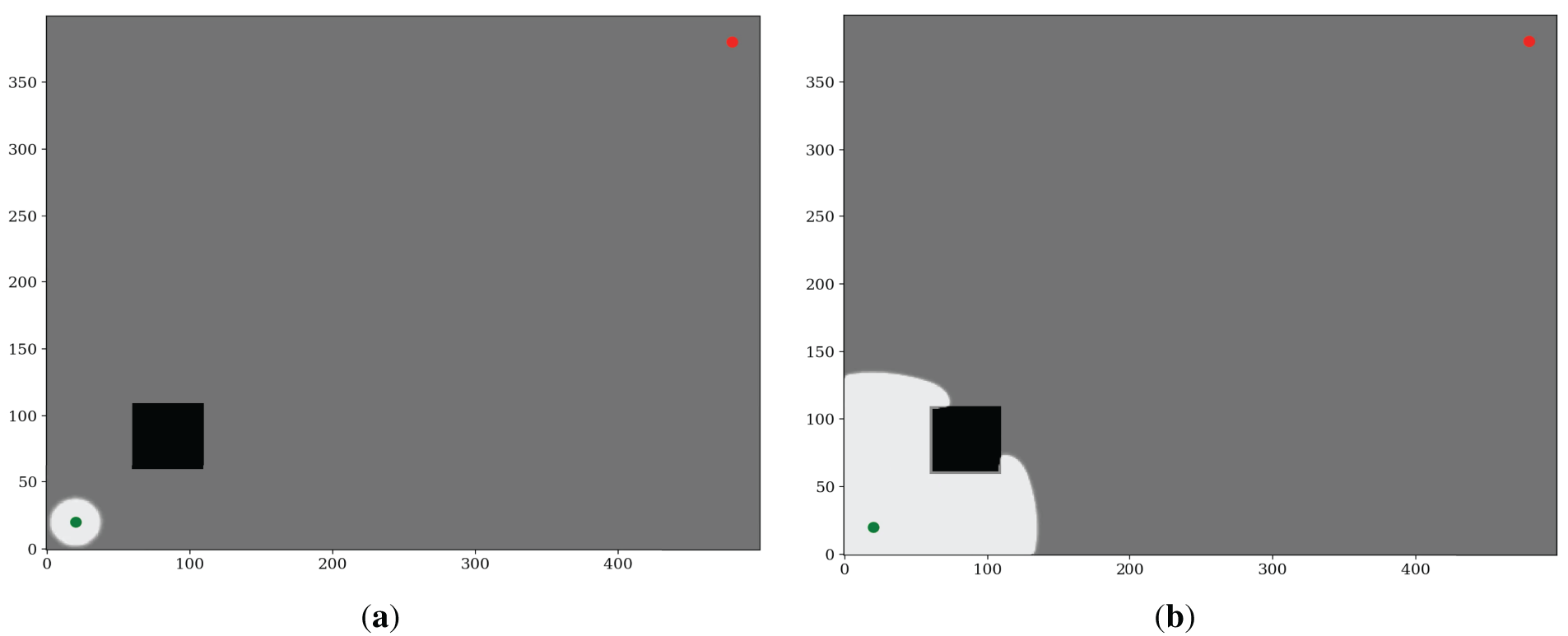
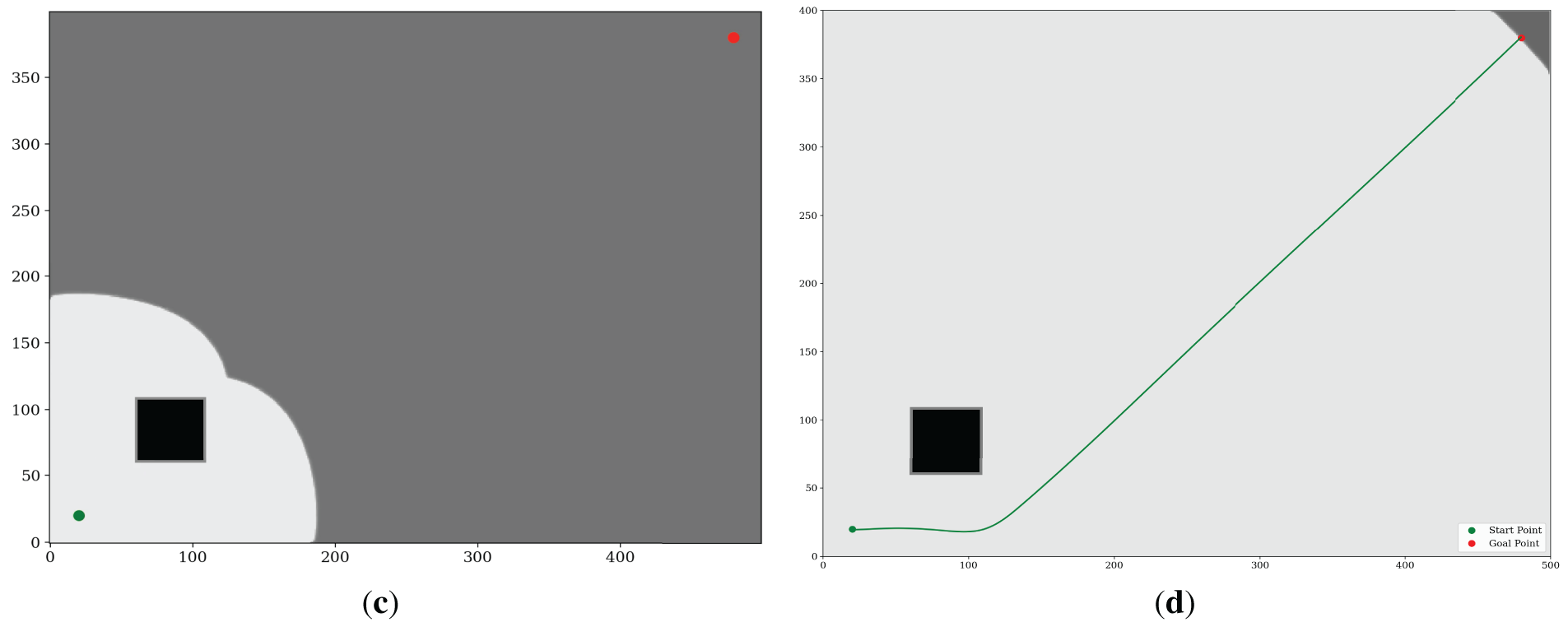
Figure 4: WWS implementation in simple environment: (a) expansion stage 1, (b) expansion stage 2, (c) expansion stage 3, (d) expansion stage 4.
Once the wavefront has covered the navigable domain, a reverse search from the goal follows cells with strictly decreasing arrival times, culminating in a collision-free path that blends efficiency and smoothness. As shown in Fig. 4, the final trajectory deftly avoids “staircase” artifacts and abrupt turns, underscoring how WWS’s global wave equation framework inherently encodes obstacle avoidance and ensures gentle curvature.
3.1.2 WWS in Complex Environment
To further test WWS beyond a single obstacle, we examined a cluttered 2D domain with multiple static obstacles of various shapes (Fig. 5). These linear barriers and circular impediments form narrow corridors, semi-enclosed passageways, and partial maze structures. Unlike local or heuristic planners susceptible to dead ends in such intricate layouts, WWS starts by globally propagating a wavefront from the start. As the wavefront evolves, arrival-time contours naturally reveal corridors and bottlenecks, offering continuous, domain-wide feedback on accessibility without incremental trial-and-error.
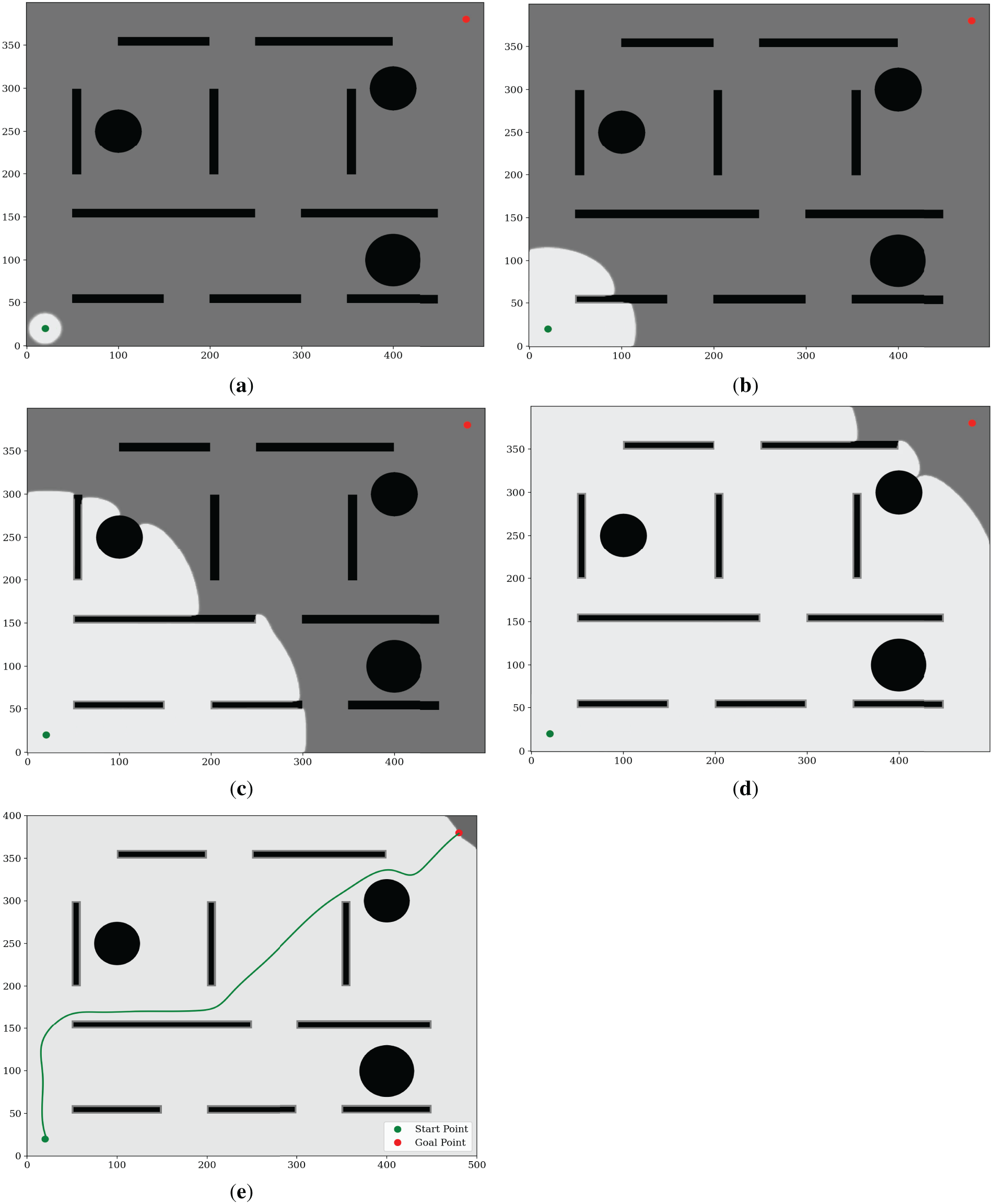
Figure 5: WWS implementation in complex environment: (a) expansion stage 1, (b) expansion stage 2, (c) expansion stage 3, (d) expansion stage 4, (e) expansion stage 5.
As wave propagation proceeds, WWS constructs a comprehensive arrival-time gradient, “lighting up” optimal routes while circumventing complex obstacles. Once all traversable cells are assigned precise times, the algorithm executes a backward traversal from the goal, following strictly decreasing arrival times. This single global expansion elegantly weaves through tight corridors and avoids local minima, eliminating the need for repeated re-planning or parametric tuning. Together with the simpler example, this scenario demonstrates WWS’s aptitude for both small-scale and maze-like environments, confirming its flexibility, global coverage, and capacity to generate naturally optimized paths.
These two sets of demonstrations—one in a simple environment and another in a considerably more complex map—collectively validate the theoretical and practical foundations of WWS. From a single obstacle to a pseudo-maze, WWS Adapts Gracefully to Complexity: The wave-based approach seamlessly scales from trivial setups to complicated geometries, without losing its capacity to discern global navigational structures. Maintains a Global Perspective: Unlike local-only methods prone to becoming stuck in dead-ends or complex corridors, WWS leverages a global arrival-time map that inherently encodes the relative difficulty of reaching any location in the domain. Produces Naturally Optimal Routes: By following decreasing arrival times from the goal to the start, WWS intrinsically finds paths that minimize travel time and respect obstacle constraints, without manually designed heuristics or extensive parameter tuning.
3.1.3 WWS in Different Complex Environment
This section demonstrates the navigation performance of the WWS algorithm in different environments, focusing on its path smoothness, obstacle avoidance capability, and adaptability to maps of varying complexity. Fig. 6 illustrates the optimal paths planned by WWS in several environments with different structures, where the start and end points are marked in green and red, respectively.
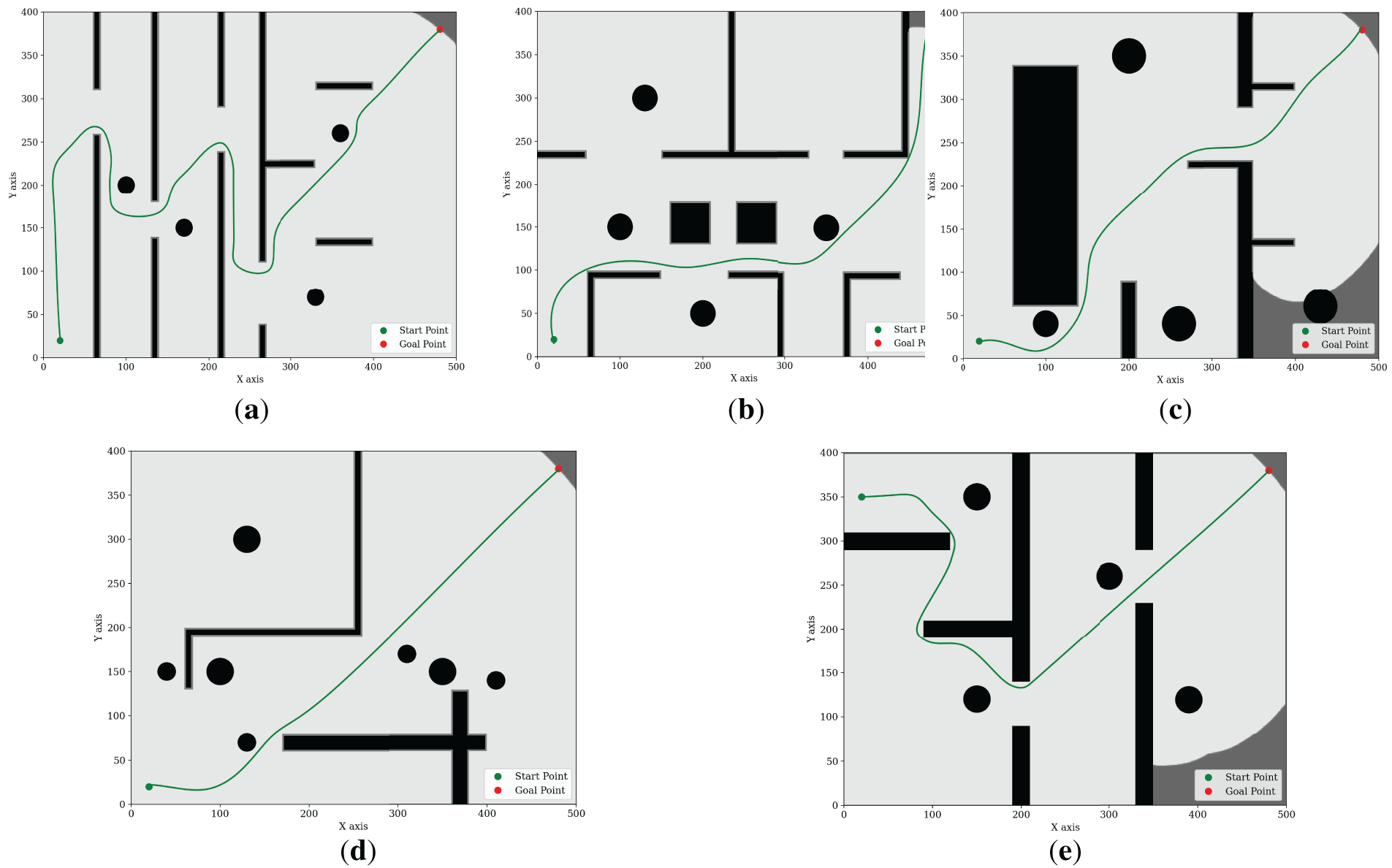
Figure 6: WWS implementation in different environment A–E: (a) environment A, (b) environment B, (c) environment C, (d) environment D, (e) environment E.
WWS exhibits strong adaptability across various environments, ensuring smooth navigation and effective obstacle avoidance. In structured obstacle environments, the algorithm accurately computes optimal paths that allow the robot to traverse narrow passages without abrupt directional changes. In maze-like environments with high obstacle density, WWS effectively avoids local optima and redundant routes while maintaining trajectory continuity. In semi-closed spaces where only specific corridors are available, WWS dynamically adjusts its path to ensure a safe distance from walls and barriers. For randomly distributed obstacles, the algorithm efficiently adapts to varying layouts, utilizing global wave propagation to avoid dead ends. In open environments, WWS generates direct and efficient paths, taking advantage of the available space for rapid goal achievement.
The simulation results confirm that WWS consistently maintains smooth trajectories and robust obstacle avoidance in diverse scenarios. The continuous wave propagation characteristic ensures that paths are both natural and efficient, enabling fluid robotic motion without excessive detours or sudden angular deviations. The algorithm’s ability to adapt to different spatial configurations highlights its potential for real-world navigation applications.
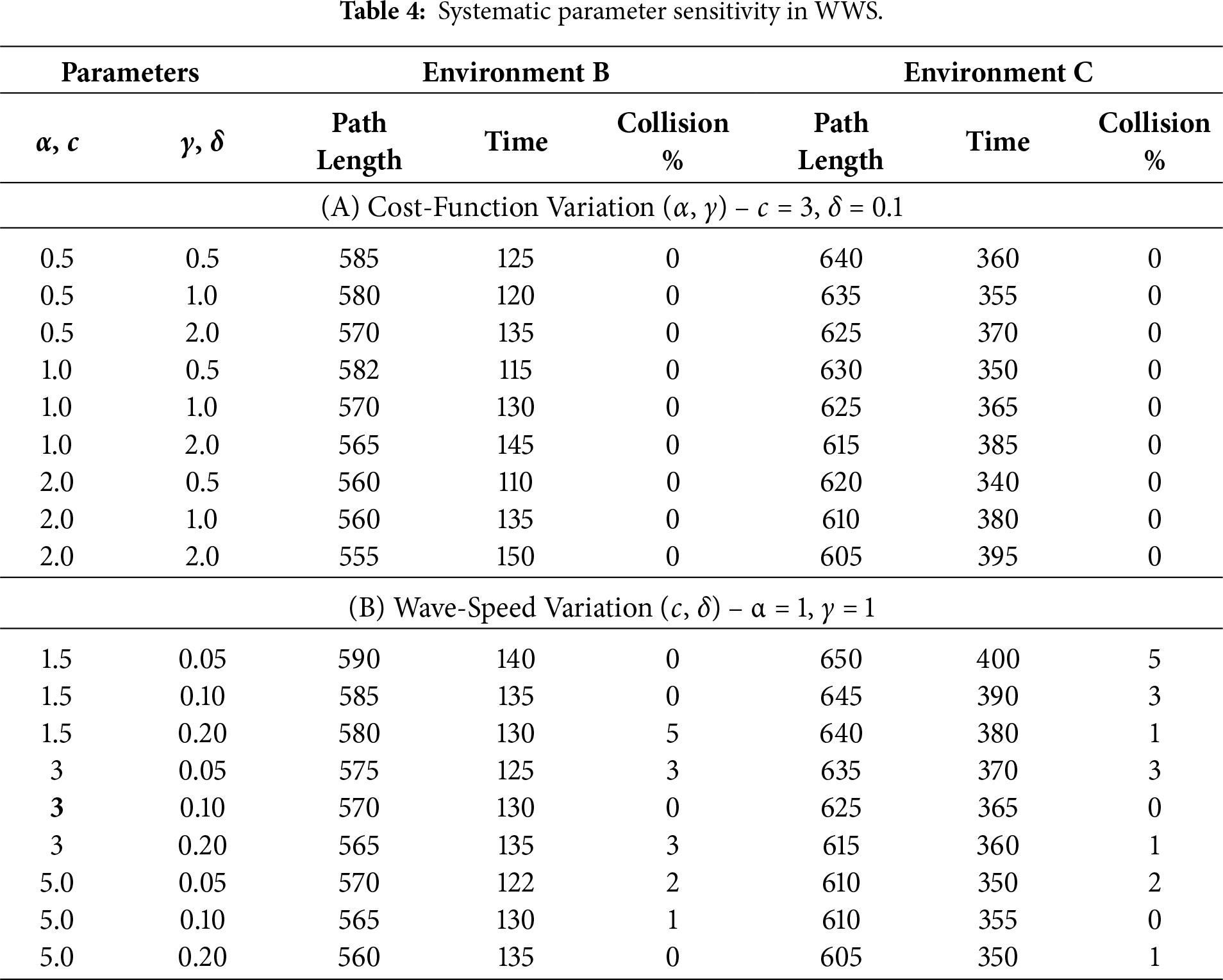
3.1.4 Systematic Parameter Sensitivity
To provide a more comprehensive understanding of how the Wave Water Simulator (WWS) algorithm behaves under different parameter settings. This investigation focuses on the four key parameters,
We selected three representative environments to encompass varying obstacle densities and geometric complexities, environment B, C. For each environment, the parameters are set as:
Table 4 summarizes the aggregated outcomes in Environment B and Environment C for varying α, δ, c and γ. Increasing α beyond 1.0 modestly reduces path length in heavily obstructed scenes (due to stricter obstacle penalties) but can raise computation time by 5%–15%. Higher γ more strongly penalizes large arrival times, causing slightly shorter but more angular routes in some configurations. Lower thresholds δ improve detection of wave arrivals, potentially beneficial for narrow corridors. However, the algorithm sometimes requires additional updates, raising computation time by 10%–20%. Typically decreases arrival-time gradients, slightly reducing path length but having marginal effect on success rate. Overall α = 1, γ = 1,
3.2 Comparison of Different Path Planning Algorithms
Simulations were performed on a machine equipped with an Intel® Core™ i7-9700 CPU @ 3.00 GHz and 16 GB RAM. All algorithms—WWS, LS, GLS, and A*—are implemented in Python 3.8 utilizing NumPy, SciPy, and Matplotlib for computations and visualizations. This common framework ensures a fair comparison.
We consider 2D grids of size approximately 500 × 400 units with
When selecting comparison benchmarks for this study, LS (Laser Simulator), GLS (Generalized Laser Simulator), FMM (Fast Marching Method), and A* collectively represent prominent path planning paradigms with differing trade-offs in complexity and coverage. LS employs a wave-like scanning approach that can expand globally in principle, but its reliance on directional heuristics may result in suboptimal expansions in cluttered domains. GLS extends LS by incorporating partial distance transforms or probabilistic exploration, thereby broadening coverage yet still retaining some heuristic elements. FMM adopts a continuous wavefront propagation strategy (solving the Eikonal equation) to yield smooth, near-optimal paths at the expense of higher computational overhead in larger or finer-resolution. Meanwhile, A* exemplifies a canonical discrete grid search, yielding near-optimal routes but often incurring higher computational load and producing “staircase” paths. Evaluating against these three baselines thus provides a comprehensive perspective on how the proposed algorithm compares across global coverage, heuristic guidance, computational overhead, and trajectory smoothness—key dimensions for robust, real-world robot navigation.
As shown in Table 5, algorithm parameters are chosen to reflect near-optimal conditions based on pilot studies and literature guidelines: WWS: Weighting factors
The proposed WWS (Wave Water Simulator) is compared with the baseline A*, as well as FMM (Fast Marching Method), GLS (Generalized Laser Simulator) and LS (Laser Simulator), in a series of simulated environments. Three core metrics are considered—Path Length, Computation Time, Path Smoothness—to provide a comprehensive assessment of overall performance. All performance metrics are averaged over 50 runs on diverse simulated maps to ensure statistical reliability, in accordance with best practices for rigorous evaluation in top-tier publications.
Tables 6–15 summarize the updated performance of A*, LS, GLS, FMM and WWS across 10 map configurations (A–J) in Fig. 7, this includes the percentage differences relative to A with respect to path length and planning time (Δ Path % vs. A, Δ Time % vs. A*) and their respective Big-O complexity. WWS consistently achieves shorter paths than LS, GLS, FMM and even A*, while maintaining competitive computation times. Unlike purely local methods (LS and GLS), which only examine portions of the environment, WWS adopts a more global perspective akin to A*—yet it does not exhaustively scan the entire map. Rather, WWS restricts its wavefront expansion to a corridor around the start–goal region, thus avoiding exploration of irrelevant cells far from the planned route. This selective coverage spares WWS from the high overhead often seen in A*, particularly in large or cluttered domains.
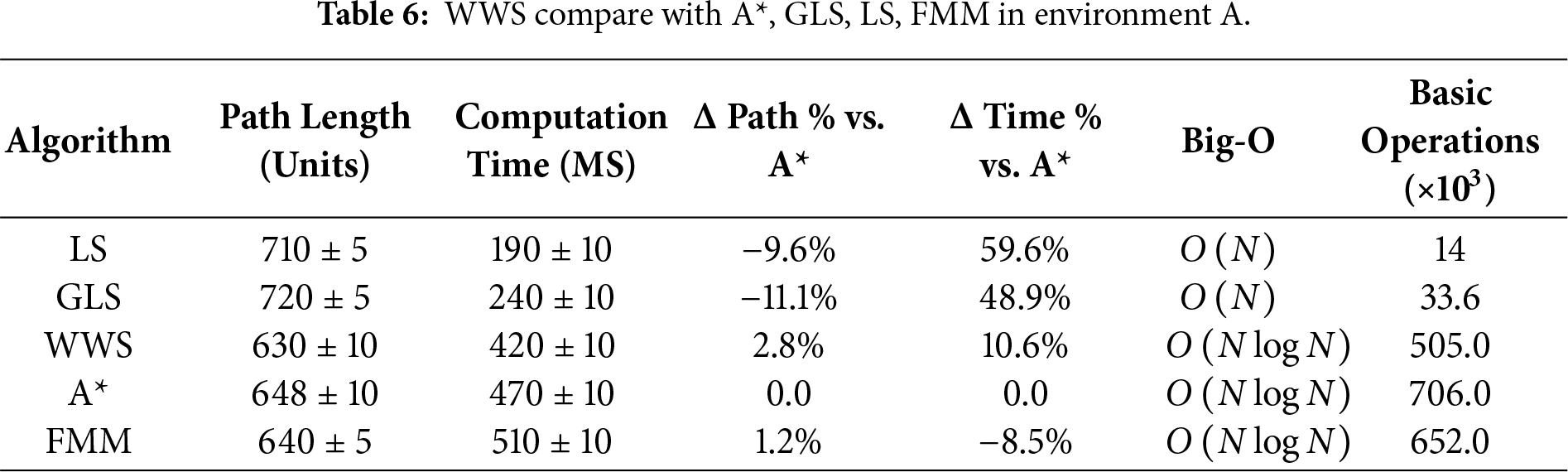
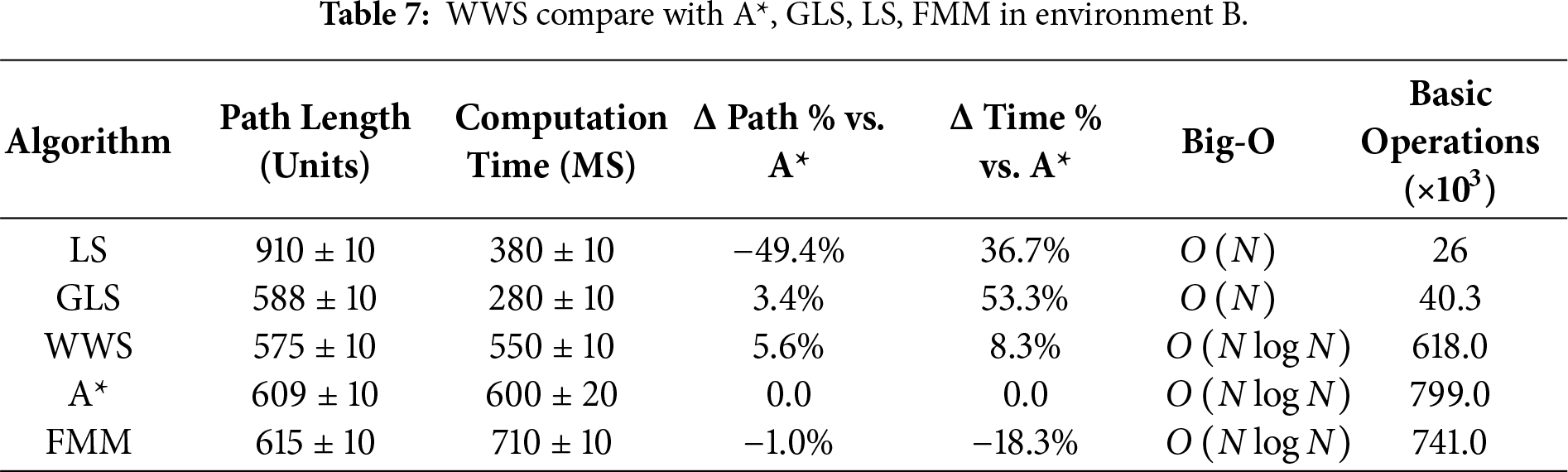
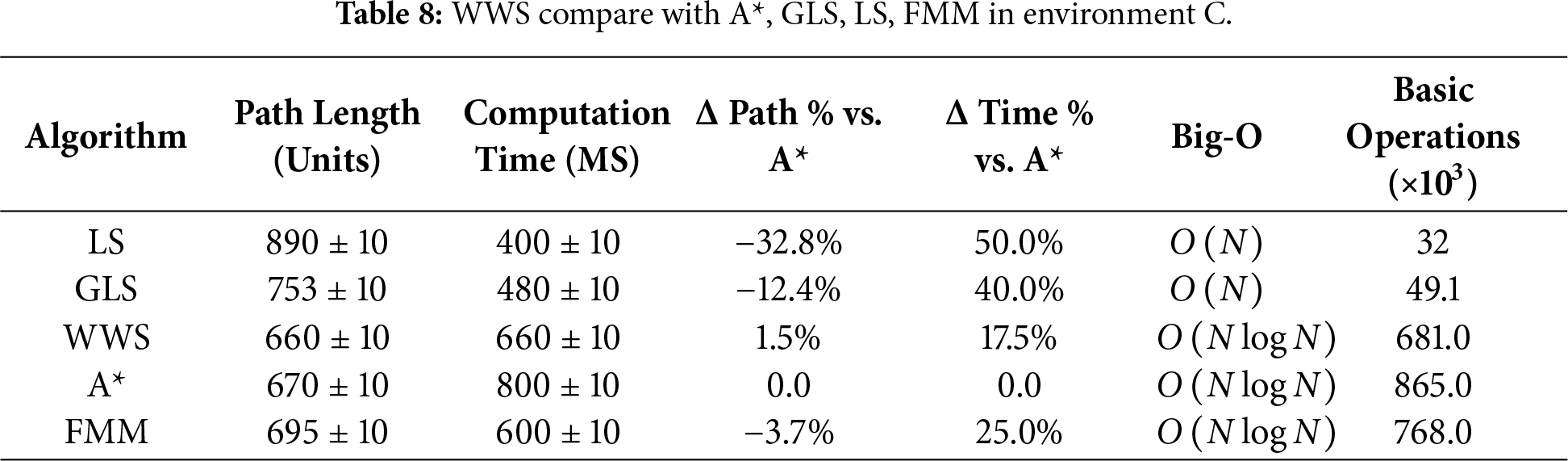
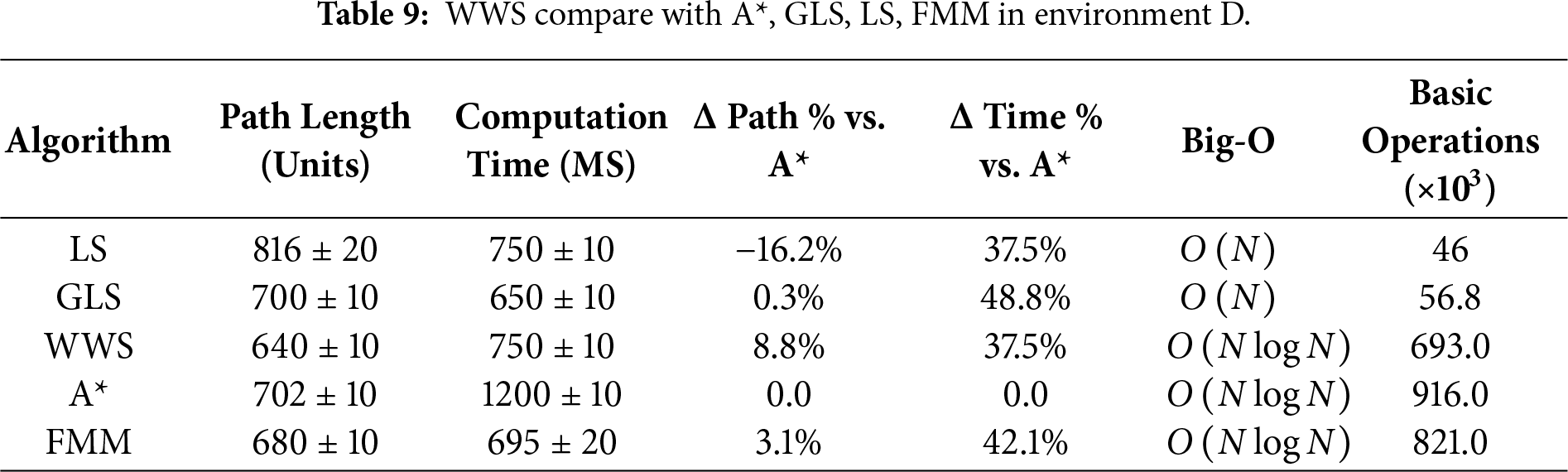
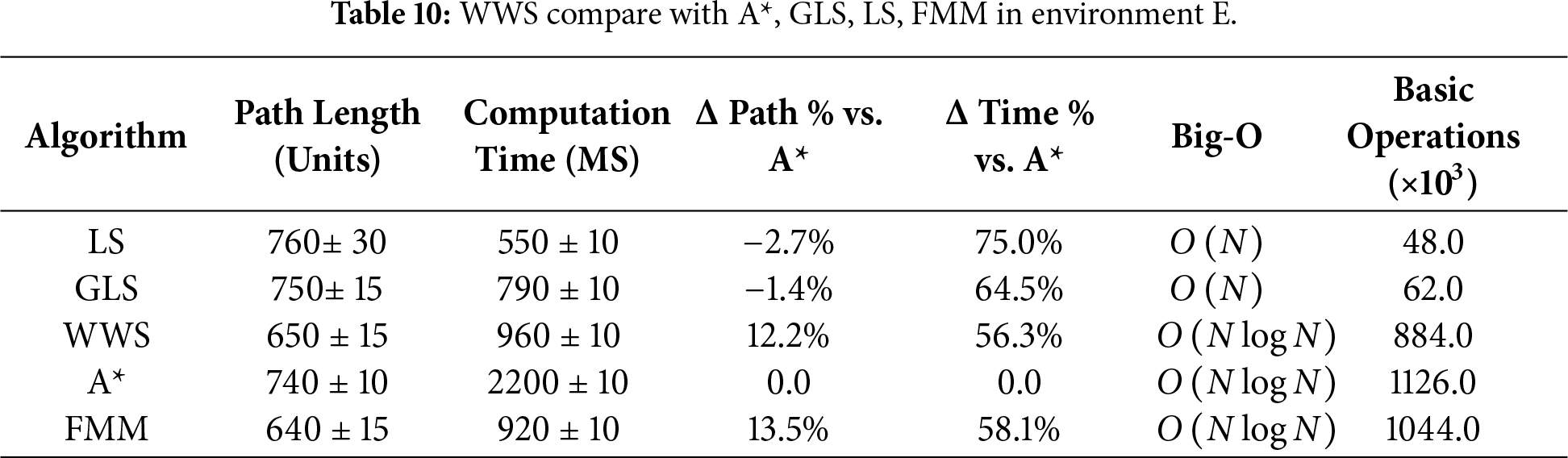
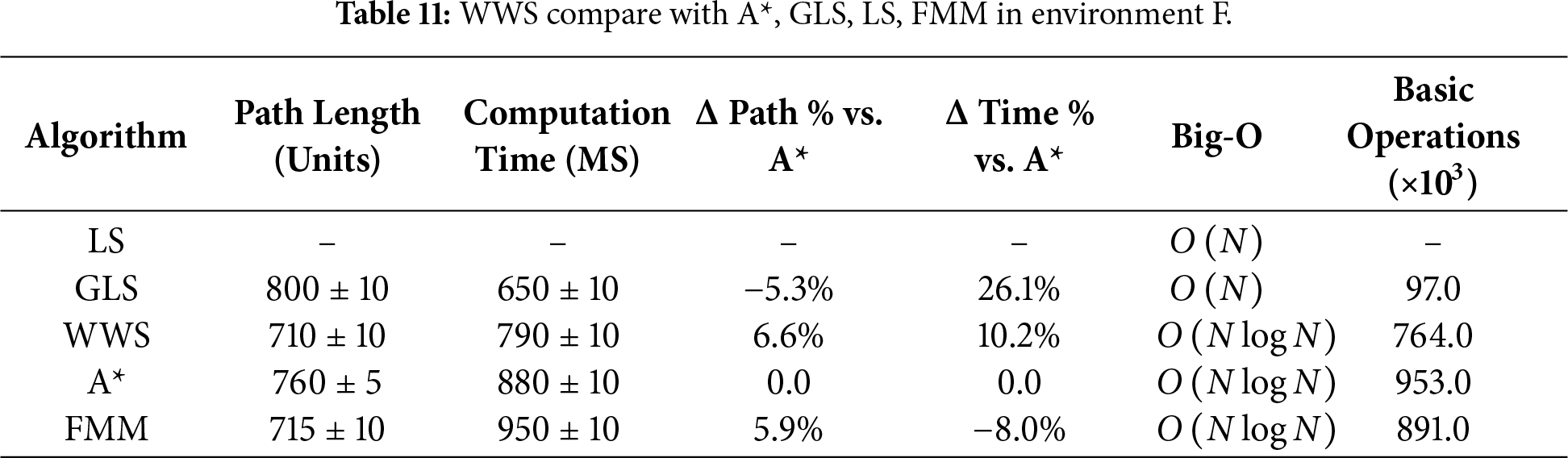
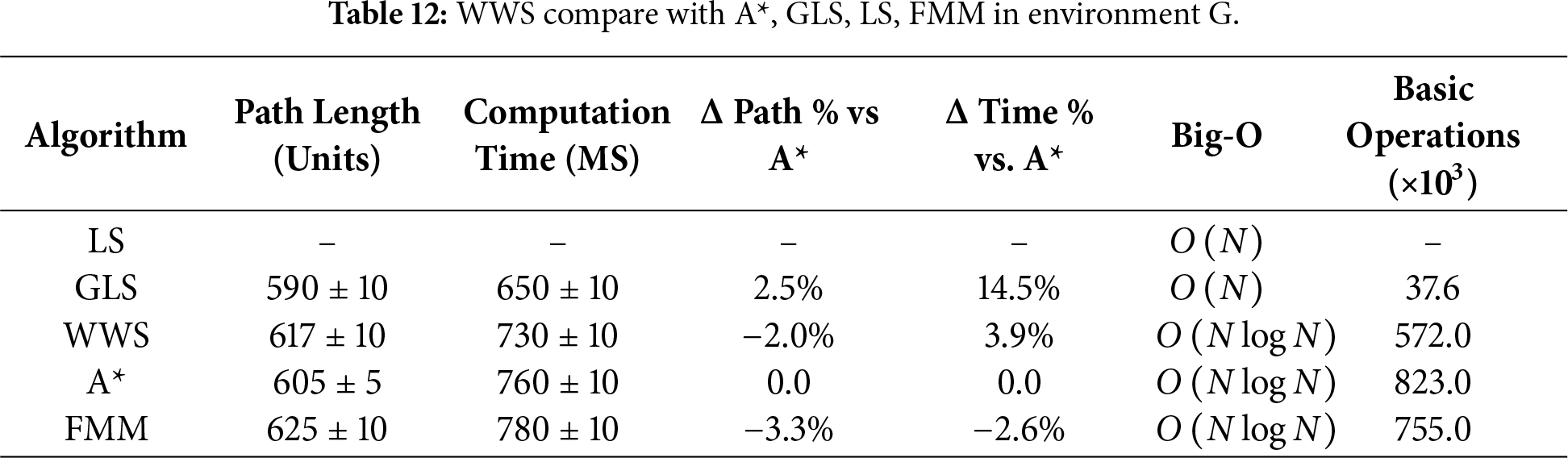
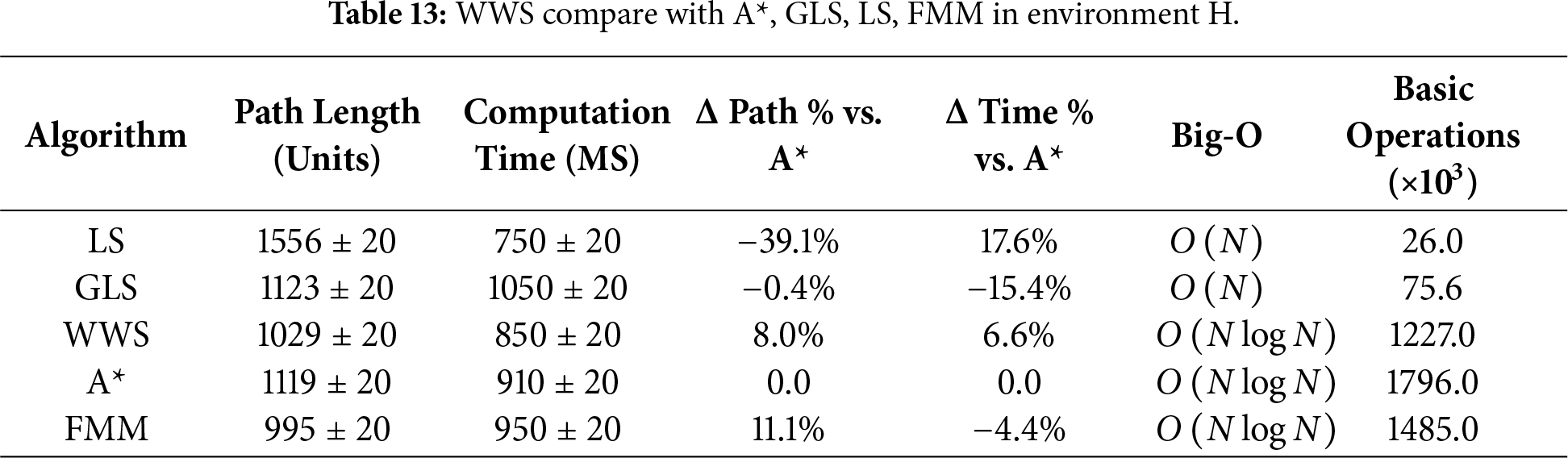
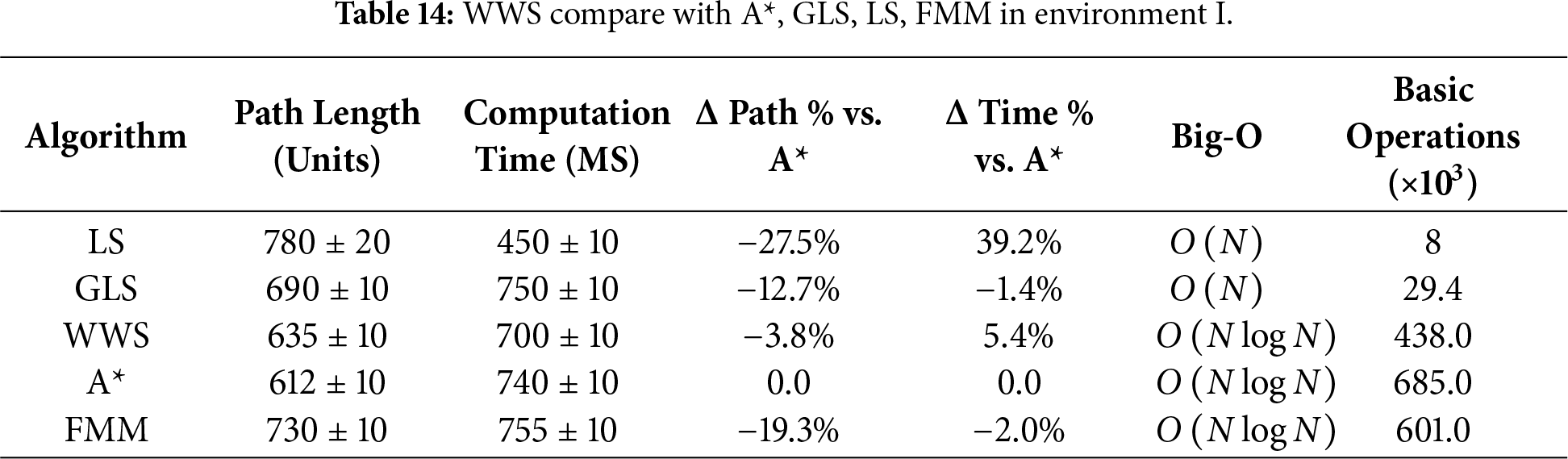
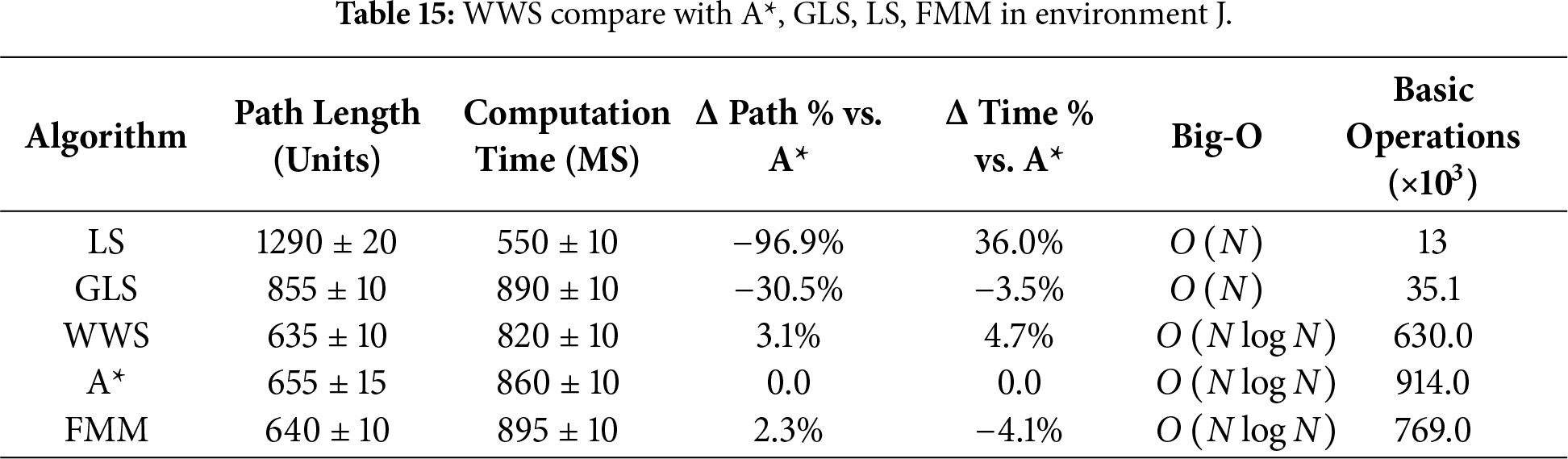
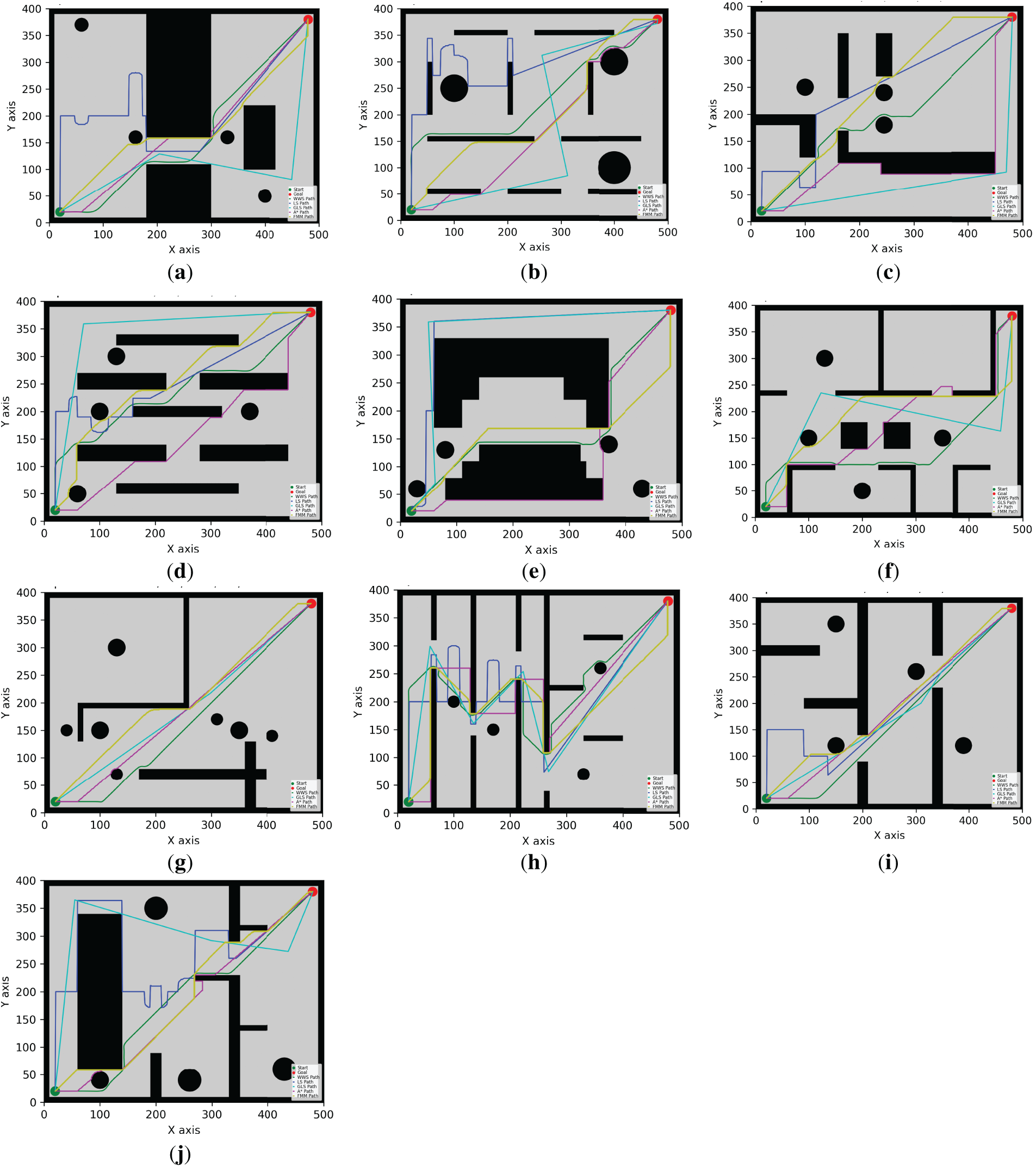
Figure 7: WWS compare with A*, GLS, LS, FMM algorithms in Environment A–J.
A clear trend in the data is that WWS not only finds near-optimal path lengths but also produces remarkably smooth trajectories. By naturally expanding wavefronts around obstacles, WWS avoids the abrupt turns and “zigzag” segments observed in many grid-based searches. In contrast, LS and GLS can generate stepwise detours due to repeated local expansions (LS even fails in maps g and f), while A* frequently yields staircase paths unless heavy post-processing is applied.
In terms of computational complexity, LS and GLS are both
In summary, based on multiple rounds of experiments on maps A–J, WWS not only achieves comparable or superior performance to A* and FMM in terms of path quality and global feasibility, but also retains some of the computational efficiency Fig. 7a–j advantages of local methods (LS, GLS). Specifically, the shortest paths generated by WWS are slightly shorter or comparable to those of A* in most scenarios. For example, in environment E, the shortest path is approximately 12% shorter than that of A*. In environments D, F, H, and J, WWS shows an average advantage of 3%–9%. In only a few extreme scenarios (e.g., environments G and I), WWS path lengths are slightly longer than A* (approximately 2%–4%), but their smoothness is often higher. Meanwhile, about computation time, WWS frequently reduces planning overhead by 5%–15% in comparison to A*.
3.3 WWS Outdoor and Indoor Environment Test
3.3.1 Outdoor Environment Test
WWS was implemented in four distinct outdoor scenarios, designated A, B, C, and D, each characterized by varying degrees of obstacle density, road curvature, and the presence of natural or man-made structures. As shown in Fig. 8, Environment A is characterized by relative openness with sparse obstructions, while scenarios B and C introduce increasingly cluttered layouts, such as denser vegetation or narrow passageways. Environment D combines open regions with corridor-like segments, reflecting typical road networks bordered by trees or low walls. In each case, raw camera images are processed briefly (e.g., perspective alignment, threshold segmentation) to yield binary occupancy maps, where black cells represent obstructed zones and white cells are navigable.
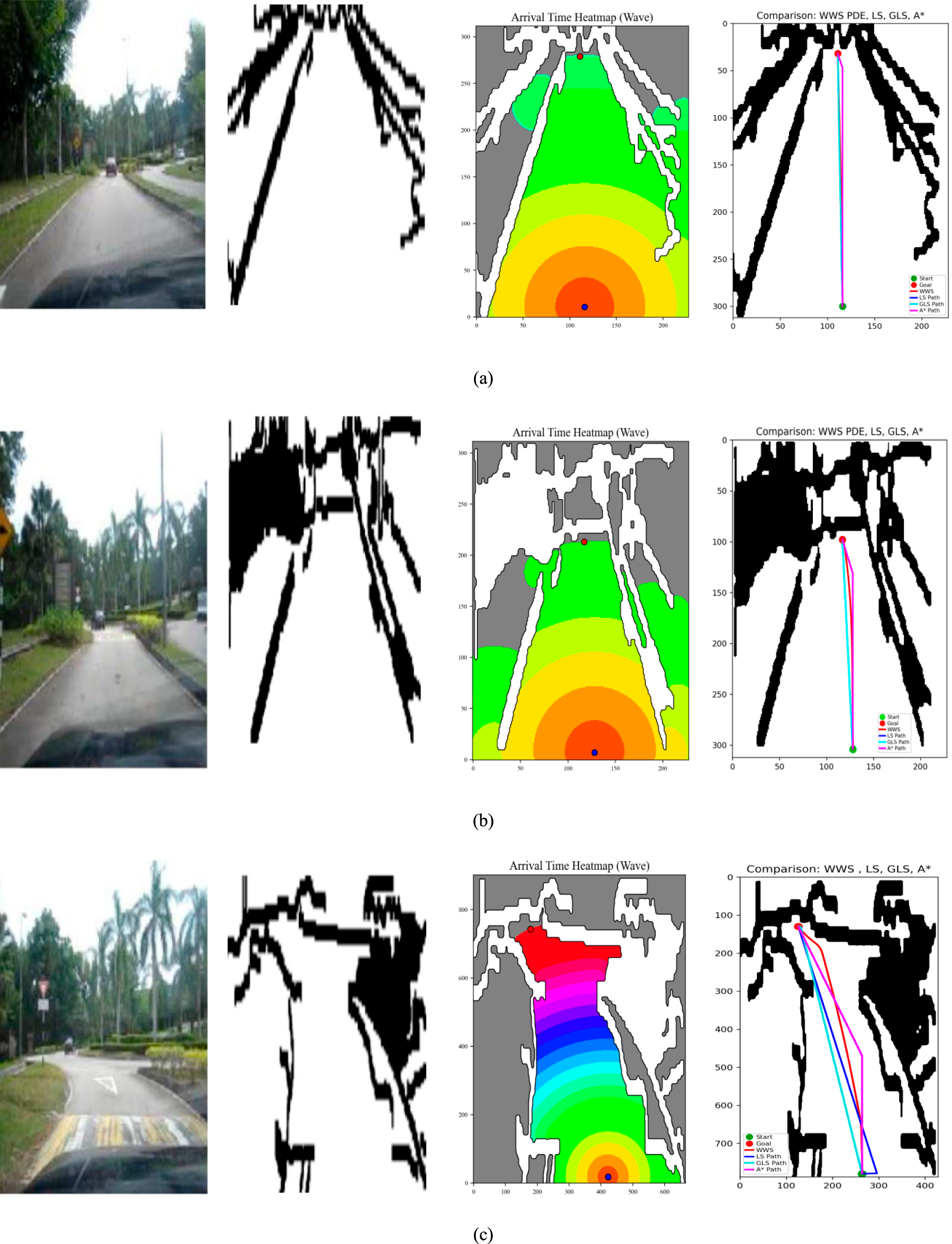
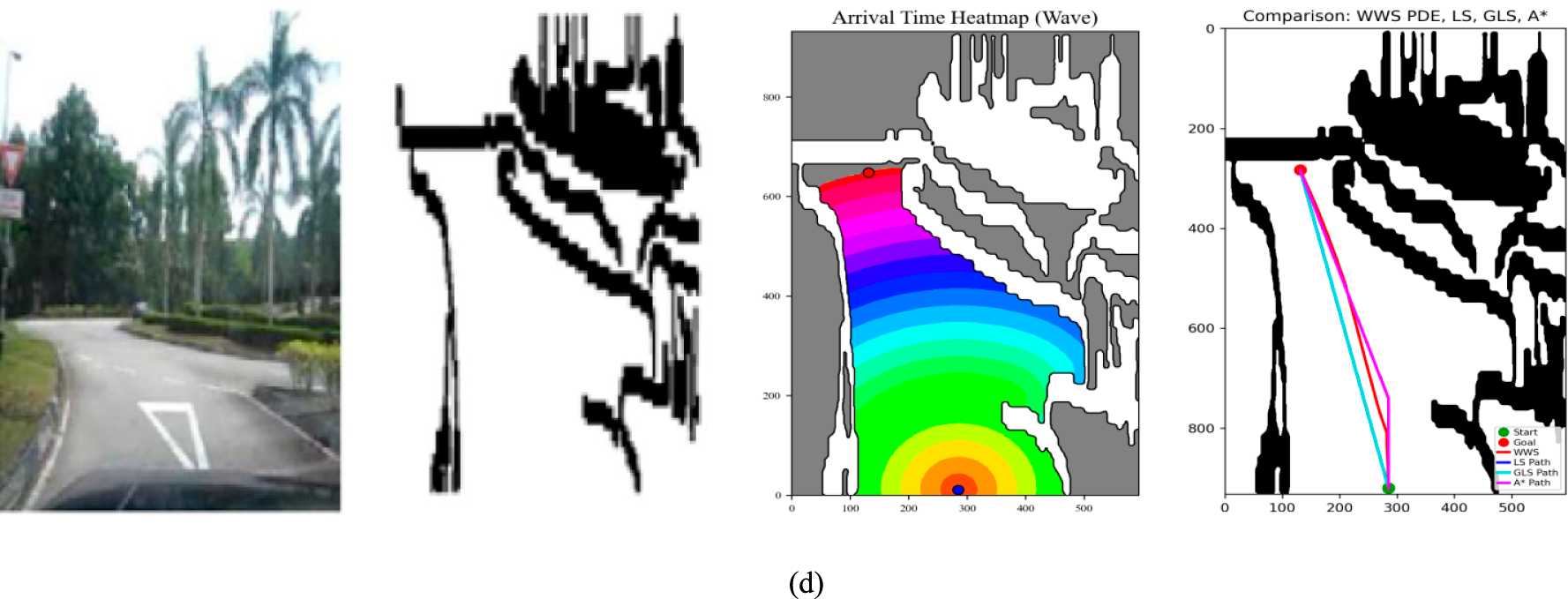
Figure 8: WWS implement in outdoor environment: (a) Outdoor environment A, (b) Outdoor environment B, (c) Outdoor environment C, (d) Outdoor environment D.
To plan a route from the start to the goal, WWS computes a wave propagation heatmap indicating how quickly each free cell is reached by the wave. The color-banded arrival-time displays reveal that warm regions (reds, oranges) denote rapid wave arrival, whereas cooler hues (greens, blues) appear in more distant or indirectly accessible areas, with obstacles remaining non-traversable (shaded or black). This heatmap visually highlights how the wave solution systematically accounts for all potential pathways around obstacles, bending around occlusions in a smooth gradient. For instance, in Environment B, the wavefront contours demonstrate gentle detours around clusters of obstacles, whereas in a tight corridor setup (e.g., C or D), the contour lines compress, revealing complex geometry. These arrival-time gradients guide the final path extraction, ensuring every feasible corridor is explored in a unified framework.
The resulting WWS paths across Environments A–D have been shown to exhibit smooth, direct navigation, even in cluttered terrain such as Environment C, where WWS avoids abrupt turns by leveraging the continuous time gradient, resulting in a path that gracefully curves around obstacles instead of making sharp angular deviations. Likewise, in corridor-like areas (Environment D), WWS blends open-area traversal with narrow corridor following, producing a coherent trajectory well suited for real vehicle motion. In comparison to earlier laser-simulator (LS) approaches, which can yield longer or more conservative routes, WWS’s wave-based formulation naturally balances obstacle clearance with minimal travel distance, achieving shorter, more efficient paths in these outdoor tests while maintaining robust collision avoidance. Compared to earlier laser-simulator approaches (LS, GLS), which can produce longer or more conservative paths due to partial expansions, WWS’s wave-based methodology systematically balances obstacle avoidance and travel distance. Although WWS’s coverage of the entire start–goal corridor can lead to higher computational complexity than LS or GLS, it remains more efficient than A*’s exhaustive global search in many cluttered or large-scale outdoor scenes.
As shown in Fig. 9, The experiments were conducted in three separate indoor laboratory settings, denoted Environments A, B, and C. Each environment featured a flat floor but varied in terms of the arrangement of obstacles. Most notably, a centrally placed tire and wooden barriers were present in Environments A and B, forcing the route to deviate. The first image in each series shows the original indoor scene, revealing how obstacles restrict the corridor or block direct travel. After this, a minimal image-processing step was applied to the scene, converting it into a binary occupancy map. This map is represented in the second image of the series, where black cells represent obstacles, and white cells denote free space.
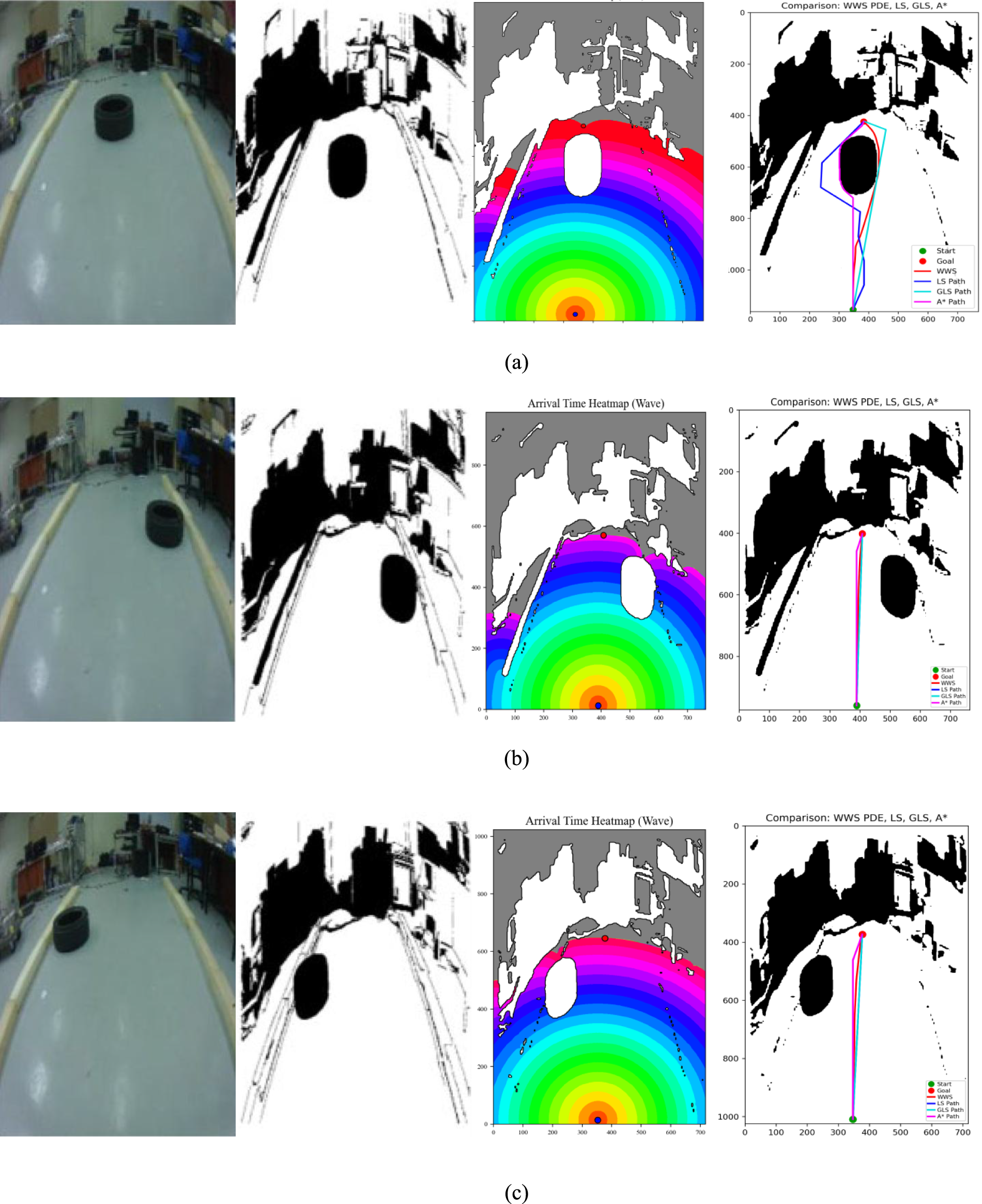
Figure 9: WWS implementation Indoor Environment: (a) Indoor environment A, (b) Indoor environment B, (c) Indoor environment C.
Following the formation of the occupancy map, the WWS algorithm calculates an arrival-time heatmap (third image), illustrating the propagation of a wave from the robot’s initial position (or goal) and its subsequent trajectory around obstacles. Each colored band in the heatmap denotes the time (or cost) required to reach that specific region. In instances where obstacles impede direct lines of travel, the wavefront curves around the obstructions, resulting in elevated arrival-time zones behind the occluding objects. This process ensures that WWS exhaustively accounts for every navigable corridor, even narrow passages. In the fourth image, the final WWS path is obtained by tracing a sequence of cells with strictly decreasing arrival times, producing a smooth, arc-like trajectory around the central tire or wooden barriers without abrupt angular turns.
In practice, WWS’s continuous wave-propagation paradigm fosters both comprehensive route exploration and high path smoothness, even in tight corridors. By expanding over the entire corridor region connecting start and goal, WWS can thoroughly map each free cell’s accessibility. This global perspective is akin to A* in that it scans a significant portion of the grid; however, WWS restricts its search to a corridor around the start–goal line, preventing a full-map scan. Consequently, WWS tends to exhibit greater computational cost than purely local methods (LS, GLS), which only sample or locally expand around the current robot location. Meanwhile, A* often has the highest overall complexity due to an exhaustive search across the entire occupancy map.
Overall, the indoor results confirm that WWS delivers high-quality navigation—a global coverage ensures no corridor is missed, while the wave-based approach gives smoother turns. Although WWS’s corridor-wide scanning increases computational burden compared to LS and GLS, it typically remains more efficient than A* in cluttered or large testbeds. Meanwhile, methods like LS, GLS, and A* are prone to “Z”-shaped or jagged trajectories, especially in obstacle-rich domains, unless extensive smoothing is applied post hoc. Hence, these findings underscore that WWS, despite its somewhat larger wave expansion, achieves shorter and smoother paths with practical computational requirements—an appealing combination for real-world robotic navigation in laboratory-scale indoor environments.
This paper presented a Wave Water Simulator (WWS) path planning algorithm that unifies global wave equation modeling with selective corridor expansion, achieving efficient and smooth navigation for autonomous robotic systems. Through comprehensive simulations and real-world tests—covering both cluttered indoor scenarios and wide-open outdoor spaces—the proposed method demonstrated consistent advantages in terms of path length reduction, smoothness, and computational cost over several established approaches. The primary conclusions are outlined as follows.
1. The proposed WWS path planning model effectively alleviates the “staircase” or piecewise-linear artifacts observed in discrete grid-based methods. The integrated wave equation formulation promotes a naturally curved, collision-free trajectory, reducing extraneous turning angles. Across multiple test environments, compared to A*, WWS consistently achieved 2%–13% shorter path lengths, reduced planning overhead by 5%–15% in computation time while preserving—or even improving—obstacle clearance., while preserving—or even improving—obstacle clearance.
2. By selectively confining the wave expansion to feasible corridors, WWS significantly reduces runtime and computational overhead without sacrificing global coverage. Even in cluttered maps with narrow corridors, WWS maintained real-time or near-real-time performance, minimizing re-planning cycles often required by purely heuristic or local approaches.
3. Extensive experiments confirmed the versatility of WWS in different obstacle distributions, ranging from simple layouts to complex maze-like maps. The algorithm seamlessly adapts to various map scales and resolutions without extensive parameter tuning. This generality underscores WWS’s potential for deployment in a broad class of robotics applications, from warehouse robots to field-based autonomous vehicles.
Despite its demonstrated effectiveness, the present version of WWS employs fixed parameters (wave speed c, threshold δ, and cost-function weights α, γ) for all experiments. Our results show that these fixed values suffice across multiple indoor and outdoor tasks, suggesting a notable degree of inherent robustness. Nevertheless, we acknowledge the advantages of a partially or fully adaptive framework. Real-time adjustments to c, α, or corridor restrictions could enhance computational efficiency in large, sparsely populated environments, while selectively increasing α might provide safer clearance in densely obstructed areas. Consequently, incorporating an automated parameter-tuning mechanism—for instance, via rule-based heuristics or machine learning—represents a promising avenue for future research. Such a module could dynamically monitor environmental changes (e.g., obstacle density, sensor noise) and update critical parameters on the fly, thereby extending WWS’s versatility to real-time, unpredictable missions.
The proposed WWS offers a practical, high-accuracy, and high-efficiency path-planning solution by capitalizing on a physically motivated wave expansion while selectively restricting coverage to critical areas. Its consistent performance in both simulation and real-world tests positions WWS as a promising new benchmark for global yet computationally feasible robotic navigation. Future work will explore two complementary directions: (1) dynamic-obstacle and multi-robot scenarios, where real-time wavefront updates and distributed PDE solvers will preserve robustness in ever-changing environments; and (2) adaptive parameter tuning, in which reinforcement-learning or Bayesian-optimization layers automatically adjust wave speed c, threshold δ, and cost-weight factors (α, γ) to match local map density or mission priorities on-the-fly, further enhancing WWS’s versatility and autonomy.
Acknowledgement: Not applicable.
Funding Statement: Authors would like to thank University of Malaya and Ministry of High Education-Malaysia for supporting this work under research grant FRGS/1/2023/TK10/UM/02/3 and GPF020A-2023.
Author Contributions: Hui Chen: conceptualization, methodology, software, writing—original draft, investigation, validation, visualization; Mohammed A. H. Ali: conceptualization, supervision, methodology, writing—review & editing, validation, funding acquisition; Bushroa Abd Razak: supervision, writing—review & editing; Zhenya Wang: writing—review & editing; Yusoff Nukman: supervision, writing—review & editing; Shikai Zhang: writing—review & editing; Zhiwei Huang: writing—review & editing; Ligang Yao: writing—review & editing; Mohammad Alkhedher: funding acquisition, writing—review & editing. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The authors do not have permission to share data.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Desouza GN, Kak AC. Vision for mobile robot navigation: a survey. IEEE Trans Pattern Anal Mach Intell. 2002;24(2):237–67. doi:10.1109/34.982903. [Google Scholar] [CrossRef]
2. Hornung A, Phillips M, Jones EG, Bennewitz M, Likhachev M, Chitta S. Navigation in three-dimensional cluttered environments for mobile manipulation. In: Proceedings of the 2012 IEEE International Conference on Robotics and Automation; 2012 May 14–18; Paul, MN, USA. p. 423–9. [Google Scholar]
3. Hoy M, Matveev AS, Savkin AV. Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey. Robotica. 2015;33(3):463–97. doi:10.1017/s0263574714000289. [Google Scholar] [CrossRef]
4. Li H, Savkin AV. An algorithm for safe navigation of mobile robots by a sensor network in dynamic cluttered industrial environments. Robot Comput Integr Manuf. 2018;54:65–82. doi:10.1016/j.rcim.2018.05.008. [Google Scholar] [CrossRef]
5. Abdel-Rahman AS, Zahran S, Elnaghi BE, Nafea SF. Enhanced hybrid path planning algorithm based on APF and a-star. Int Arch Photogramm Remote Sens Spat Inf Sci. 2023;48(1):867–73. doi:10.5194/isprs-archives-XLVIII-1-W2-2023-867-2023. [Google Scholar] [CrossRef]
6. Xi W, Lin J, Shao Z. Path planning of mobile robot based on improved PRM and APF. Meas Control. 2025;58(8):979–95. doi:10.1177/00202940241291282. [Google Scholar] [CrossRef]
7. Jin J, Zhang Y, Zhou Z, Jin M, Yang X, Hu F. Conflict-based search with D* lite algorithm for robot path planning in unknown dynamic environments. Comput Electr Eng. 2023;105:108473. doi:10.1016/j.compeleceng.2022.108473. [Google Scholar] [CrossRef]
8. Yu J, Yang M, Zhao Z, Wang X, Bai Y, Wu J, et al. Path planning of unmanned surface vessel in an unknown environment based on improved D*Lite algorithm. Ocean Eng. 2022;266:112873. doi:10.1016/j.oceaneng.2022.112873. [Google Scholar] [CrossRef]
9. Guo H, Li Y, Wang H, Wang C, Zhang J, Wang T, et al. Path planning of greenhouse electric crawler tractor based on the improved A* and DWA algorithms. Comput Electron Agric. 2024;227(1):109596. doi:10.1016/j.compag.2024.109596. [Google Scholar] [CrossRef]
10. Wang H, Lou S, Jing J, Wang Y, Liu W, Liu T. The EBS-A* algorithm: an improved A* algorithm for path planning. PLoS One. 2022;17(2):e0263841. doi:10.1371/journal.pone.0263841. [Google Scholar] [PubMed] [CrossRef]
11. Tang H, Zhu Q, Shang E, Dai B, Hu C. A reference path guided RRT* method for the local path planning of UGVs. In: Proceedings of the 2020 39th Chinese Control Conference (CCC); 2020 Jul 27–29; Shenyang, China. p. 3904–9. [Google Scholar]
12. Zhou X, Wang X, Xie Z, Gao J, Li F, Gu X. A Collision-free path planning approach based on rule guided lazy-PRM with repulsion field for gantry welding robots. Robot Auton Syst. 2024;174:104633. doi:10.1016/j.robot.2024.104633. [Google Scholar] [CrossRef]
13. Huang J, Wu Y, Lin X. Smooth JPS path planning and trajectory optimization method of mobile robot. Trans Chin Soc Agric Mach. 2021;52(2):22–30. [Google Scholar]
14. Sánchez-Ibáñez JR, Pérez-Del-Pulgar CJ, García-Cerezo A. Path planning for autonomous mobile robots: a review. Sensors. 2021;21(23):7898. doi:10.3390/s21237898. [Google Scholar] [PubMed] [CrossRef]
15. Zhang W, Xu G, Song Y, Wang Y. An obstacle avoidance strategy for complex obstacles based on artificial potential field method. J Field Robot. 2023;40(5):1231–44. doi:10.1002/rob.22183. [Google Scholar] [CrossRef]
16. Ugwoke KC, Nnanna NA, Abdullahi SE. Simulation-based review of classical, heuristic, and metaheuristic path planning algorithms. Sci Rep. 2025;15(1):12643. doi:10.1038/s41598-025-96614-2. [Google Scholar] [PubMed] [CrossRef]
17. Telea A. An image inpainting technique based on the fast marching method. J Graph Tools. 2004;9(1):23–34. doi:10.1080/10867651.2004.10487596. [Google Scholar] [CrossRef]
18. Danielmeier L, Seitz S, Barz I, Hartmann P, Hartmann M, Moormann D. Modified constrained wavefront expansion path planning algorithm for Tilt-Wing UAV. In: Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS); 2022 Jun 21–24; Dubrovnik, Croatia. p. 676–85. [Google Scholar]
19. Ding B, Xin Z, Yin H. Global smooth solutions of 2D quasilinear wave equations with higher-order null conditions and short pulse initial data. Sci China Math. 2025:1–70. doi:10.1007/s11425-024-2405-4. [Google Scholar] [CrossRef]
20. Ibrahim I, Gillis J, Decré W, Swevers J. Exact wavefront propagation for globally optimal one-to-all path planning on 2D Cartesian grids. IEEE Robot Autom Lett. 2024;9(11):9431–7. doi:10.1109/LRA.2024.3460409. [Google Scholar] [CrossRef]
21. Al-Mutib K, AlSulaiman M, Emaduddin M, Ramdane H, Mattar E. D* Lite based real-time multi-agent path planning in dynamic environments. In: Proceedings of the International Conference on Computational Intelligence, Modelling and Simulation (CSSIM); 2011 Sep 20–22; Washington, DC, USA. p. 170–4. [Google Scholar]
22. Mandava RK, Mrudul K, Vundavilli PR. Dynamic motion planning algorithm for a biped robot using fast marching method hybridized with regression search. Acta Polytech Hung. 2019;16:189–208. [Google Scholar]
23. Ali MA, Mailah M, Hing TH. Implementation of laser simulator search graph for detection and path planning in roundabout environments. WSEAS Trans Signal Process. 2014;10:118–26. [Google Scholar]
24. Ali MAH, Mekhilef S, Yusoff N, Razak BA. Laser simulator logic: a novel inference system for highly overlapping of linguistic variable in membership functions. J King Saud Univ Comput Inf Sci. 2022;34(10):8019–40. doi:10.1016/j.jksuci.2022.07.017. [Google Scholar] [CrossRef]
25. Muhammad A, Ali MAH, Turaev S, Abdulghafor R, Shanono IH, Alzaid Z, et al. A generalized laser simulator algorithm for mobile robot path planning with obstacle avoidance. Sensors. 2022;22(21):8177. doi:10.3390/s22218177. [Google Scholar] [PubMed] [CrossRef]
26. Ali MA, Mailah M. Laser simulator: a novel search graph-based path planning approach. Int J Adv Rob Syst. 2018;15(5):172988141880472. doi:10.1177/1729881418804726. [Google Scholar] [CrossRef]
27. Mirebeau JM, Portegies J. Hamiltonian fast marching: a numerical solver for anisotropic and non-holonomic eikonal PDEs. Image Process Line. 2019;9:47–93. doi:10.5201/ipol.2019.227. [Google Scholar] [CrossRef]
28. Tryggvason G, Scardovelli R, Zaleski S. Direct numerical simulations of gas-liquid multiphase flows. Cambridge, UK: Cambridge University Press; 2011. [Google Scholar]
29. Sethian JA, University of California, Berkeley. Level set methods and fast marching methods. 2nd ed. Cambridge, UK: Cambridge University Press; 1999. [Google Scholar]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools