
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
A PPO-Based DRL Approach for Scalable Communication in Civilian UAV Networks
1 Faculty of Software Engineering, FPT University, Hanoi, Vietnam
2 Faculty of Information Technology, Hung Yen University of Technology and Education, Hungyen, Vietnam
* Corresponding Author: Nguyen Minh Quy. Email:
(This article belongs to the Special Issue: AI-Driven Next-Generation Networks: Innovations, Challenges, and Applications)
Computers, Materials & Continua 2026, 87(2), 79 https://doi.org/10.32604/cmc.2026.074398
Received 10 October 2025; Accepted 19 January 2026; Issue published 12 March 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Nowadays, Unmanned Aerial Vehicles (UAVs) are making increasingly important contributions to numerous applications that enhance human quality of life, such as sensing and data collection, computing, and communication. However, communication between UAVs still faces challenges due to high-dynamic topology, volatile wireless links, and strict energy budgets. In this work, we introduce an improved communication scheme, namely Proximal Policy Optimization (PPO). Our solution casts hop–by–hop relay selection as a Markov decision process and develops a decentralized Proximal Policy Optimization framework in an actor–critic form. A key novelty is the design of the reward function, which jointly considers the delivery ratio, end-to-end delay, and energy efficiency, enabling flexible prioritization in dynamic environments. The simulation results across swarms of 20–70 UAVs show that, the proposed framework enhances delivery ratio to 5% over a Deep Q-Network baseline (reachingKeywords
Unmanned Aerial Vehicles (UAVs) have emerged as one of the potial solutions for countless of civilian applications, such as disaster monitoring [1], search and rescue [2], smart agriculture [3], delivery and logistics [4], environment sensing [5], and traffic monitoring [6]. Thanks to their high mobility, flexible deployment, and advanced sensing capabilities, UAVs play an important role in rapid data collection and wide-area coverage when traditional communication networks are unavailable. Furthermore, the integration of UAVs within future 6G networks is expected to revolutionize wireless connectivity through space-air-ground integrated networking, enabling ubiquitous, ultra-reliable, and intelligent services for next-generation applications such as autonomous transportation, massive Internet of Things (IoT), and global emergency response [7]. This vision positions UAVs as core participants for realizing large-scale, resilient, and adaptive communication infrastructures in the 6G era [8]. Fig. 1 illustrates a range of UAV-enabled applications such as disaster monitoring, search and rescue, delivery logistics, environmental sensing, smart agriculture, and traffic surveillance. This highlights the interactions among UAVs, ground stations, and wireless links, clarifying the process by which UAVs collect, relay, and transmit information. When multiple UAVs operate collaboratively, they form a flying ad hoc network (FANET), where each UAV not only carries payloads but also acts as a communication relay.
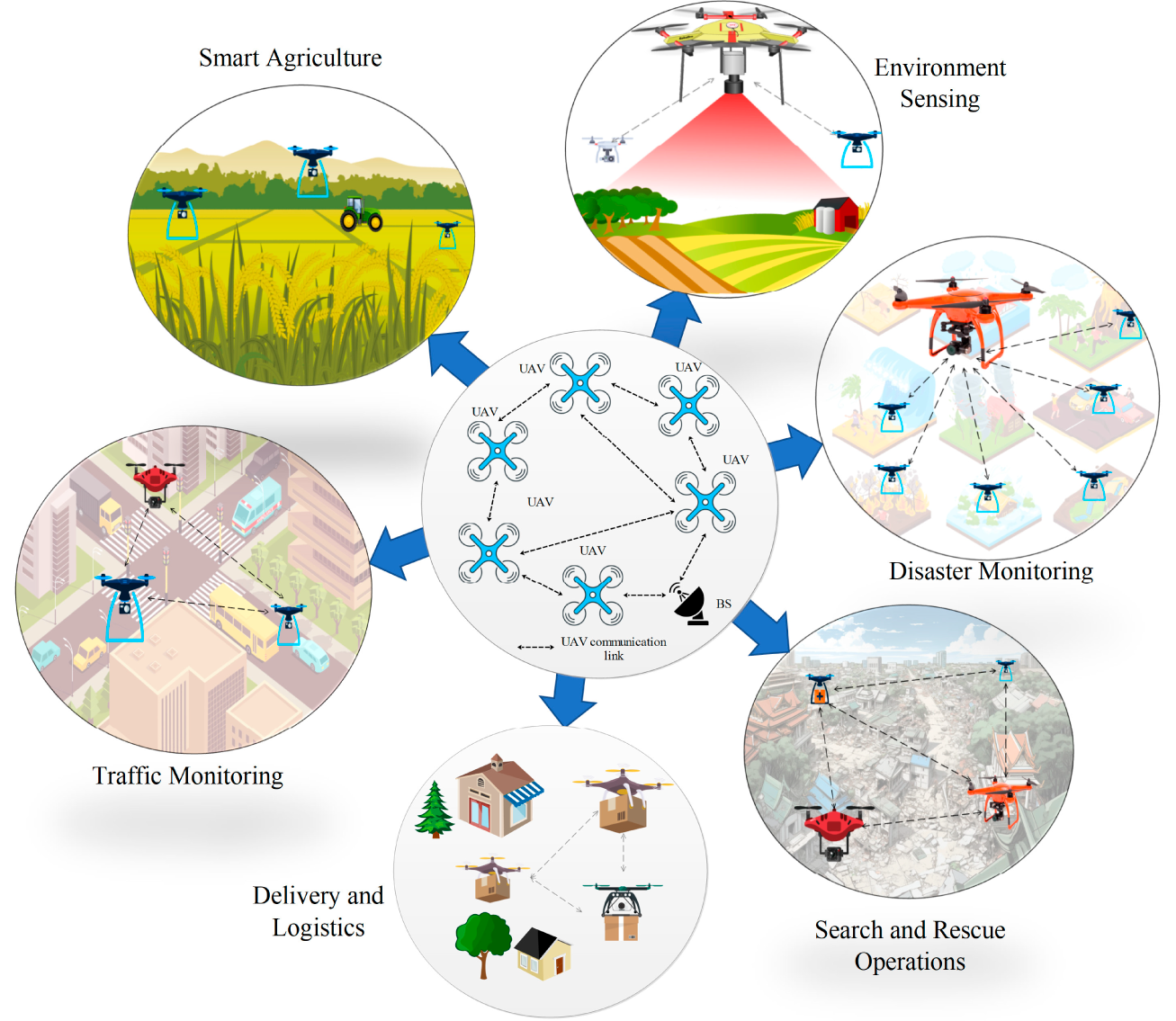
Figure 1: Several typical civilian UAV-enabled systems.
FANETs are crucial to ensure reliable coordination, data exchange, and route planning among UAVs. However, the management of FANETs faces challenges due to the high mobility, dynamic topology, limited onboard energy, and unstable wireless links. These factors pose challenges in designing efficient communication solutions for UAVs. Conventional communication schemes lack the flexibility and adaptability required to be effective under highly dynamic environments, and often rely on static metrics, periodic control messages, or greedy forwarding decisions, which result in high routing overhead, frequent link failures, and reduced packet delivery performance in UAV swarms. As a result, there is a strong demand for intelligent routing mechanisms that can adapt in real time to changes in network topology and communication quality.
Recently, Reinforcement Learning (RL) has emerged as a promising paradigm for intelligent network management, enabling agents to learn optimal routing policies through interaction with the environment [9]. Unlike static rule-based routing, RL-based protocols can adapt to environmental uncertainty such as fluctuating link quality or changing UAV positions. Among RL approaches, actor–critic methods, which combine policy learning (actor) with value estimation (critic), provide a powerful framework for sequential decision-making in complex, dynamic networks than traditional Q-learning methods. In this study, we propose a routing protocol based on Proximal Policy Optimization (PPO) tailored for FANETs in civilian applications. Our key contributions can be summarized as follows:
• Designing FANET communication process as a Markov Decision Process (MDP), defining suitable state, action, and reward representations that capture UAV mobility, link quality, and energy constraints.
• Proposing an actor–critic PPO framework to learn adaptive routing policies that maximize packet delivery while minimizing delay and energy consumption.
• Evaluating the proposed protocol in a simulation environment and comparing it with baseline protocols. Results demonstrate significant improvements in terms of packet delivery ratio, end-to-end delay, and energy efficiency.
The rest of the paper is organized as follows. Section 2 presents related works on routing in FANETs and reinforcement learning-based approaches. Section 3 presents the proposed solution and actor-critic framework. Section 4 demonstrates the experimental results along with related analyses. The potential research directions are outlined in Section 5, and conclusions are presented in Section 6.
The communication in FANETs faces challenges such as fast topology changes, intermittent connectivity, and stringent energy constraints. Traditional communication protocols offer low overhead but degrade under high mobility due to stale neighborhood information and myopic link metrics. Recent surveys emphasizing the need for learning-based approaches that adapt to temporal dynamics and uncertainty in air–ground links [10]. In this context, RL has emerged as a potential solution to couple routing/forwarding with mobility, power control, and spectrum decisions in a closed-loop manner.
Value-based RL: One of the most typical techniques of the approach is the DQN scheme. The study [11] demonstrated a multi-agent imitation learning approach for differentiated UAV services, showing that data-driven policies improve deployment decisions over handcrafted heuristics in mobile edge computing (MEC) scenarios. While effective, such methods can be brittle under policy shifts and partial observability due to a lack of explicit trust-region safeguards, which are typical of modern policy-gradient methods.
Multi-agent RL: To improve reliability under adversarial environments, the work in [12] proposed a multi-agent RL framework for UAV swarm communications that jointly optimizes relay selection and power allocation against jamming. The study evidences the gains of centralized training with decentralized execution (CTDE) in highly dynamic air-to-air links, a setting analogous to multi-relay selection in FANET routing. Beyond robustness, multi-agent Deep Reinforcement Learning (DRL) has been leveraged to plan trajectories and allocate MEC resources jointly. The study in [13] developed a multi-agent DRL scheme for distributed trajectory optimization under differentiated services, achieving latency and energy improvements by co-optimizing UAV motion and task processing. These results motivate routing formulations that elevate next-hop selection to part of a larger control surface spanning mobility and computation.
Energy efficiency and reliable relaying: Energy-aware formulations are pivotal for battery-limited UAVs. The work [14] addresses an energy-efficient 3D access problem and demonstrates that carefully designed access/placement policies reduce the total UAV count while meeting service constraints. Additionally, the study [15] introduces reliable and energy-efficient relaying via collaborative beamforming, demonstrating that learning-aided controllers can balance rate and energy under rapidly fluctuating channels. These works inform routing cost functions that trade off delivery ratio, delay, and propulsion/radio energy in FANETs.
Policy-gradient methods and PPO: In the domain of continuous control, reinforcement learning agents based on value functions are often susceptible to training instability and high variance. To mitigate these shortcomings, trust-region policy optimization (TRPO) and PPO algorithms were developed. These methods constrain the magnitude of policy updates by employing a clipped surrogate objective function, which substantially enhances training stability and improves sample efficiency. Illustrating this in a networking context, the study in [16] utilized PPO to autonomously optimize transmission periods for IoT edge devices. Their research demonstrated robust convergence and a favorable trade-off between latency and energy consumption, even under non-stationary traffic conditions.
3.1 RL and Actor-Critic Framework
In this subsection, we will introduce the RL and the actor-critic scheme, as well as the proposed framework to enhance system performance.
RL is a widely adopted branch of artificial intelligence designed to address decision-making problems that evolve over time under uncertainty. In this framework, a learning entity interacts continuously with its surrounding environment by taking actions and observing their outcomes. The learning objective is to optimize a long-term performance measure, commonly defined as the cumulative expected return. Through repeated interaction and experience, the learner gradually develops an optimal or near-optimal decision-making strategy, known as a policy, that maximizes the total reward over an extended horizon. The fundamental components that characterize the RL framework are summarized as follows:
• Agent: The autonomous learner responsible for selecting actions based on observed information and its current decision policy.
• Environment: The external system that responds to the agent’s actions by changing its condition and issuing evaluative feedback.
• State (S): A description or observation capturing the current condition of the environment as perceived by the agent.
• Action (A): A set of possible decisions or controls that the agent may apply to influence the environment.
• Reward (R): A scalar feedback signal that quantifies the immediate benefit or penalty resulting from an action.
• Policy (
The interaction process proceeds sequentially over discrete time steps. At time instant
• Value-based methods aim to approximate a value function (e.g., Q-function) that estimates the reward return of taking an action in a given state. The optimal policy is derived implicitly by selecting actions that maximize this value. Representative algorithms include Q-learning and Deep Q-Networks (DQN). While effective in discrete action spaces, these methods face limitations when extended to a continuous domain.
• Policy-based methods directly learn a parameterized policy without relying on an intermediate value function. Optimization is performed through gradient ascent on the expected return, with well-known examples such as REINFORCE, Trust Region Policy Optimization (TRPO), and PPO. These methods are suitable for continuous action spaces and expressive policy representations, but they often suffer from high variance and require substantial data for convergence.
• Actor–Critic methods integrate the advantages of the previous two paradigms, where the actor represents the policy and the critic evaluates it through a value function. This structure improves the stability and efficiency of policy updates, as demonstrated by algorithms such as Advantage Actor–Critic and Deep Deterministic Policy Gradient (DDPG). Nevertheless, balancing the learning dynamics between actor and critic remains a challenge.
• Model-based methods differ fundamentally in that they attempt to learn or assume an explicit model of the environment’s dynamics, which can then be exploited for planning and decision making. Techniques such as Dyna-Q exemplify this approach.
The Actor-Critic framework represents a foundational architecture in reinforcement learning, designed to integrate the advantages of both policy-based and value-based methods. In this approach, the learning agent maintains two interdependent components: an actor, which determines the policy for selecting actions, and a critic, which evaluates those actions through a value estimation process. This dual structure allows the agent to refine its policy in a more stable and data-efficient manner compared to purely value-based or policy-based schemes [18].
Fig. 2 illustrates the standard architecture of the actor–critic framework in reinforcement learning. This model comprises three main components: the Actor, the Critic, and the Environment. Each component has a distinct role but operates in a tightly coupled feedback loop, ensuring both policy exploration and value estimation are jointly optimized. During operation, the Actor is represented by a parameterized policy, denoted as
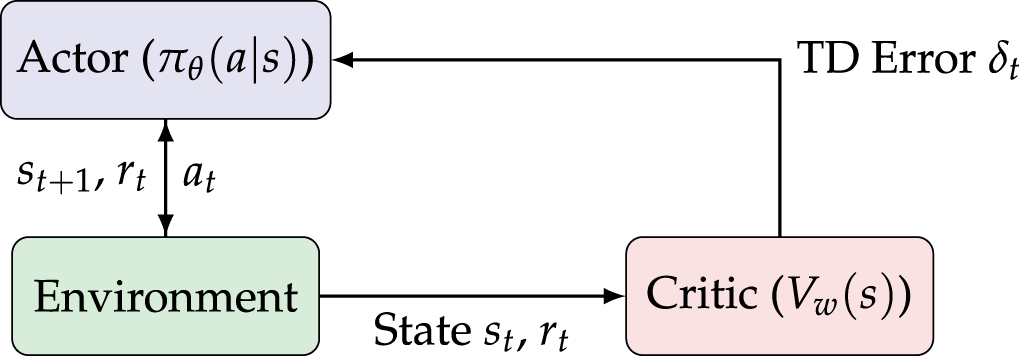
Figure 2: Standard structure of the actor–critic model.
At each timestep
where
where
where
Fundamentally, the actor is responsible for exploration and decision-making, whereas the critic ensures evaluation and stability during the learning process. This reciprocal relationship forms a synergistic learning mechanism: the actor improves its policy based on the critic’s feedback, and the critic enhances its value estimation using the actor’s updated behavior. Such two-way interaction accelerates convergence and reduces variance compared to methods that rely solely on either policy gradients or value functions.
While the Actor-Critic framework provides a robust foundation for policy learning, it remains sensitive to large or unstable policy updates, which may lead to divergence during training. To address this limitation, advanced algorithms such as Proximal Policy Optimization (PPO) have been developed to stabilize learning by introducing constrained updates to the policy network.
3.1.3 Proximal Policy Optimization
PPO is a refinement of the Actor-Critic framework designed to improve training stability and sample efficiency [19]. The key innovation of PPO lies in its use of a clipped surrogate objective function, which restricts the magnitude of policy updates between iterations. This ensures smoother learning dynamics and prevents destructive policy shifts during the training process. This constraint prevents destructive updates that can occur in conventional policy gradient methods, effectively balancing exploration and stability without requiring complex second-order optimization. PPO defines the clipped objective as:
where
3.2 PPO-Based RL for FANET Routing
3.2.1 Problem Setting and Design Goals
We address hop–by–hop relay selection in FANETs under rapid topology changes, fluctuating link quality, and on-board compute limits. The objective is to maximize packet delivery ratio while controlling end-to-end delay and control overhead, using a decentralized actor–critic agent at each UAV. The proposed implementation follows a proximal policy optimization (PPO) scheme with (i) generalized advantage estimation (GAE), (ii) true mini-batch updates with candidate masking/padding, (iii) a shared-encoder backbone, (iv) normalized advantages, and (v) learning-rate scheduling, as realized in the provided code base.
3.2.2 System and Network Model
Each node
We formulate, for each node
3.2.3 Policy, Value Function, and Learning Signals
The actor implements a parametric policy
where
The final objective function is a weighted sum of the clipped policy loss, value loss, and an entropy regularization term that encourages policy exploration.
where
PPO-Proposed uses GAE with parameters
We implement event-driven shaping: successful delivery results in a strong positive terminal reward, while failure results in a negative terminal reward. Ongoing forwarding earns a small base reward, minus a per-step cost, and is further enhanced by a link-quality bonus, as shown in Eq. (9).
where
Data plane (online selection). Given neighbors, the agent builds
Control plane (feedback and update). Upon feedback, the reward has been computed with link-quality fallback estimation, appends the sample, and triggers PPO updates once a trajectory or buffer threshold is reached. Updates run in mini-batches with dynamic padding.
Fig. 3 describes the PPO-Proposed routing pipeline used for hop-by-hop relay selection. At each decision instant, the Actor implements a stochastic policy
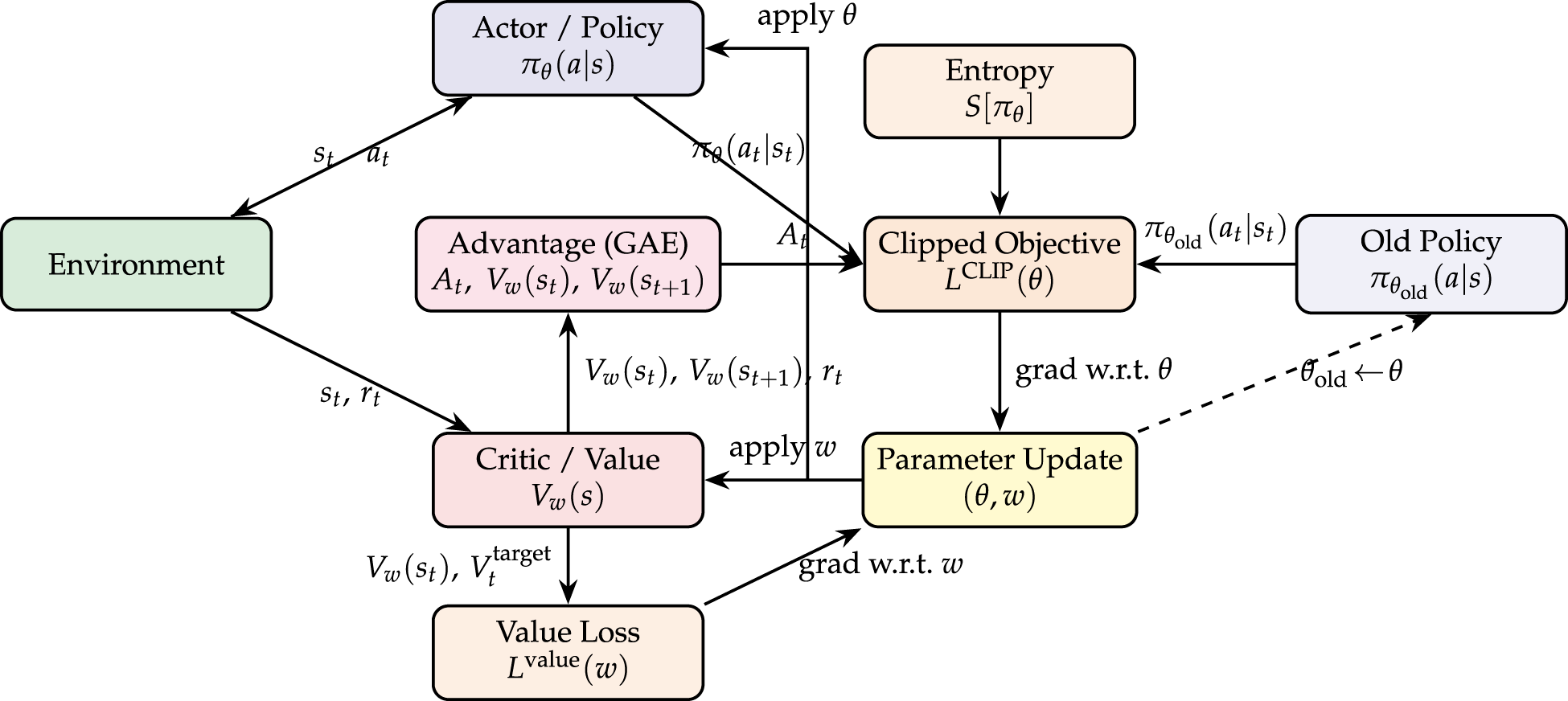
Figure 3: PPO-proposed model.
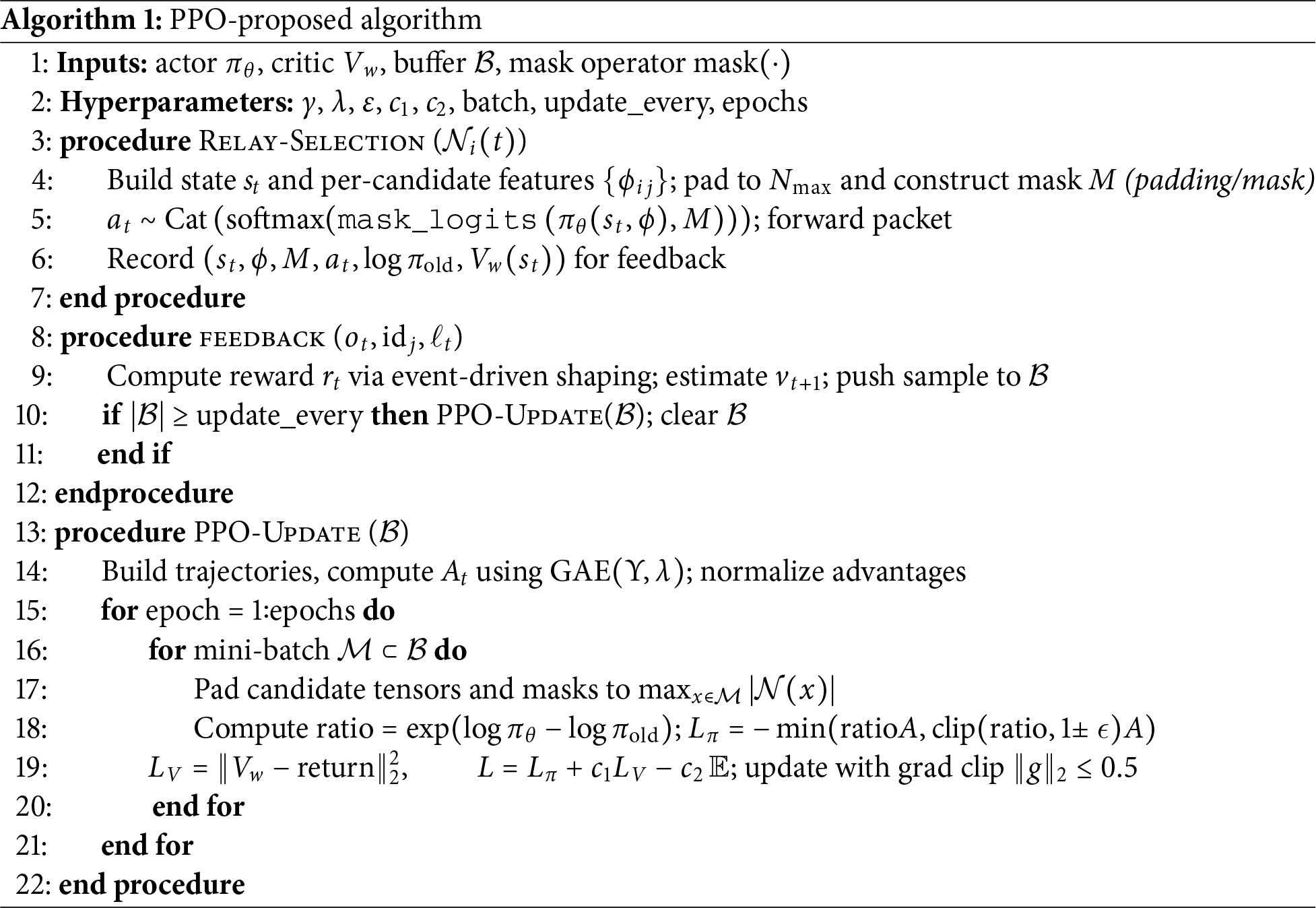
Algorithm 1 outlines the workflow of the proposed PPO-based RL protocol. It summarizes the state construction, relay selection based on learned policy, reward evaluation, sample collection, and policy parameter updates performed at each UAV node during network operation.
To validate the effectiveness of the proposed approach, simulation experiments are conducted using the DroNETworkSimulator platform1. The number of unmanned aerial vehicles (UAVs) varies between 20 and 70 to examine scalability. These UAVs are randomly deployed within a two-dimensional area measuring
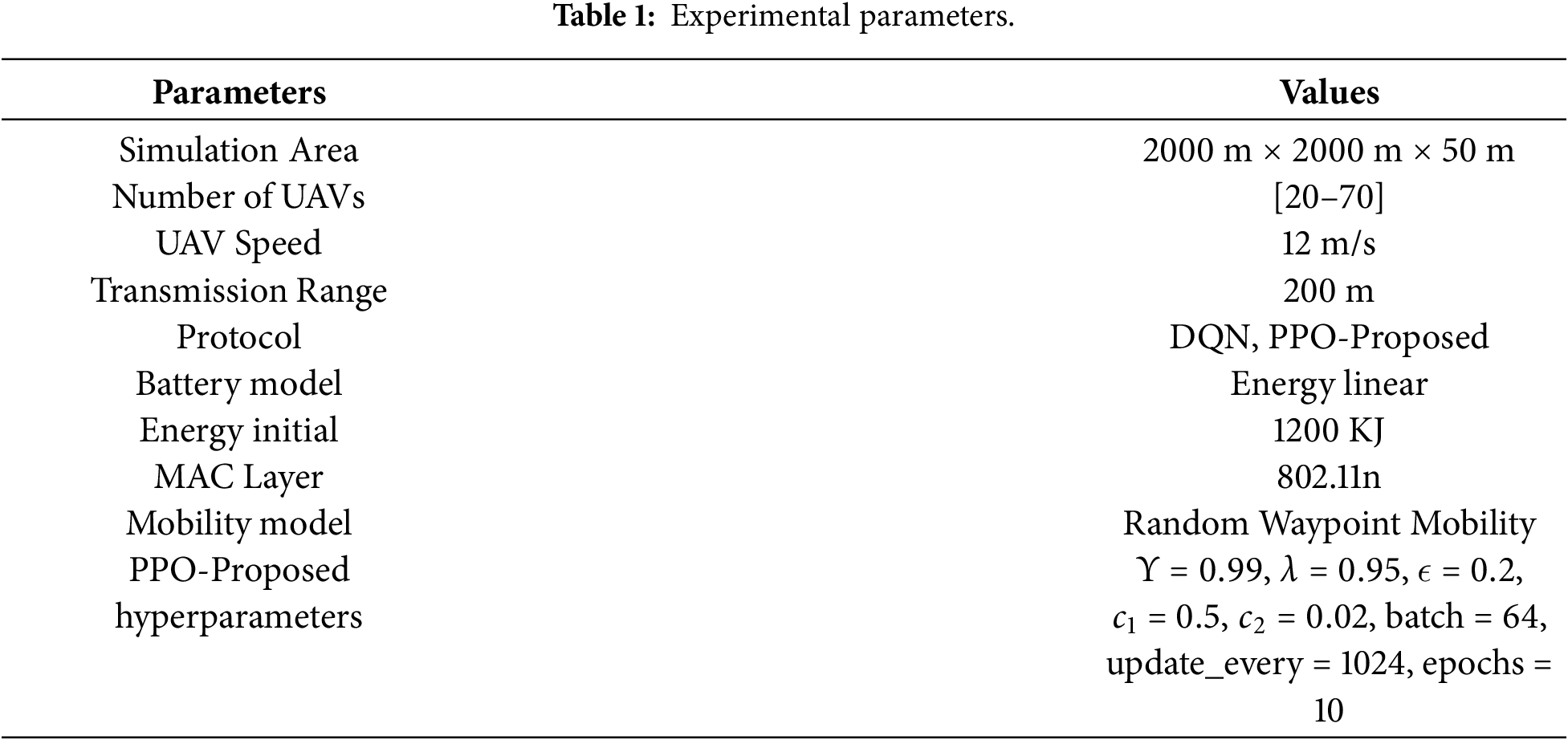
The considered scenarios reflect practical applications such as smart agriculture monitoring and search-and-rescue operations in smart city environments. Accordingly, the UAV cruising velocity is configured at approximately 12 m/s, while the maximum inter-UAV communication range is limited to around 220 m. Based on this setup, we consider the performance of the DQN and the PPO-Proposed protocols. We use common metrics to evaluate, including end-to-end delay, packet delivery ratio (PDR), and energy consumption. Although real-world UAV missions typically follow more structured or task-driven trajectories, we adopt the Random Waypoint (RWP) model as a standard and widely used baseline for FANET evaluations. RWP induces continuous topology variations, providing a suitable stress-test environment for assessing routing robustness under highly dynamic link conditions, which aligns with the primary objective of this study. Moreover, prior UAV networking literature shows that routing performance trends remain consistent across mobility models when the focus is on link dynamics rather than precise flight kinematics. Future work will incorporate mission-oriented mobility patterns to further strengthen the generalizability of the results.
Fig. 4 presents the latency as the number of UAVs increases. The DQN baseline shows that the latency decreases from approximately 46 ms at 20 UAVs to
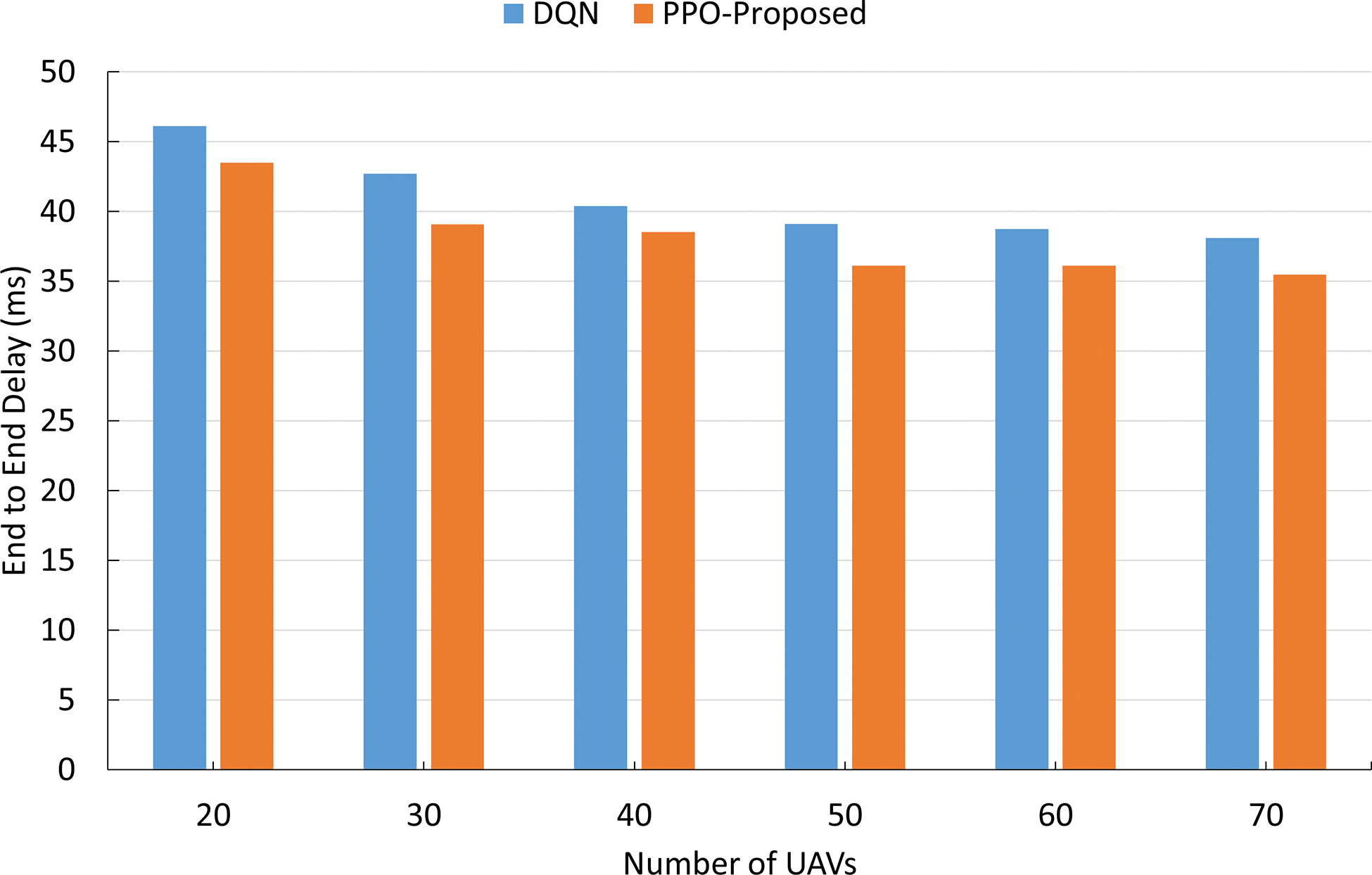
Figure 4: End-to-end delay.
These results were achieved thanks to PPO’s clipped updates and advantage estimation, which stabilize policy improvement alongside link-quality features and action masking, thereby reducing retransmissions and queueing along the selected paths.
Fig. 5 demonstrates the packet delivery ratio as the number of increasing UAVs. Both solutions benefit from higher node density. While DQN improves from 65% at 20 nodes to about 76% at 70 nodes, the PPO-Proposed achieves a higher PDR rate, increasing from 66% at 20 nodes to 80% at 70 nodes. The results also show lower achieved performance in sparse networks and an upward trend as the number of UAVs increases, particularly between 50 and 70 nodes, reflecting superior robustness under increased contention and faster topology changes. These results were achieved thanks to PPO-Proposed’s clipped policy updates and advantage estimation, which stabilize the learning process. Together with link-quality features and action masking, these promote reliable next-hop choices in FANETs.
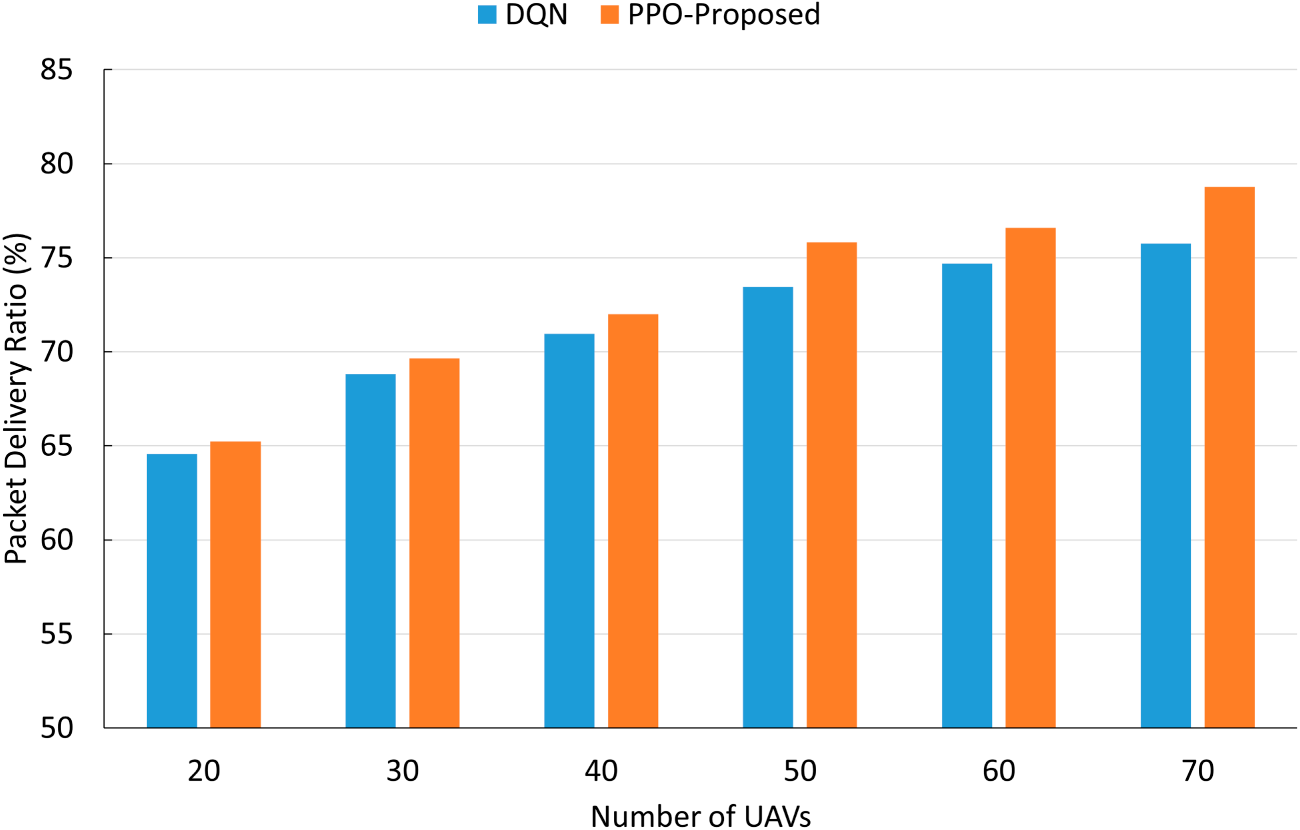
Figure 5: Packet delivery ratio.
Fig. 6 compares the total energy consumption as the size of the increasing UAV swarm. Both schemes exhibit an almost linear increase with the number of UAVs: the DQN baseline rises from roughly 440 KJ at 20 nodes to just above 2000 KJ at 70 nodes. The proposed solution also has a similar trend but improved across most settings (
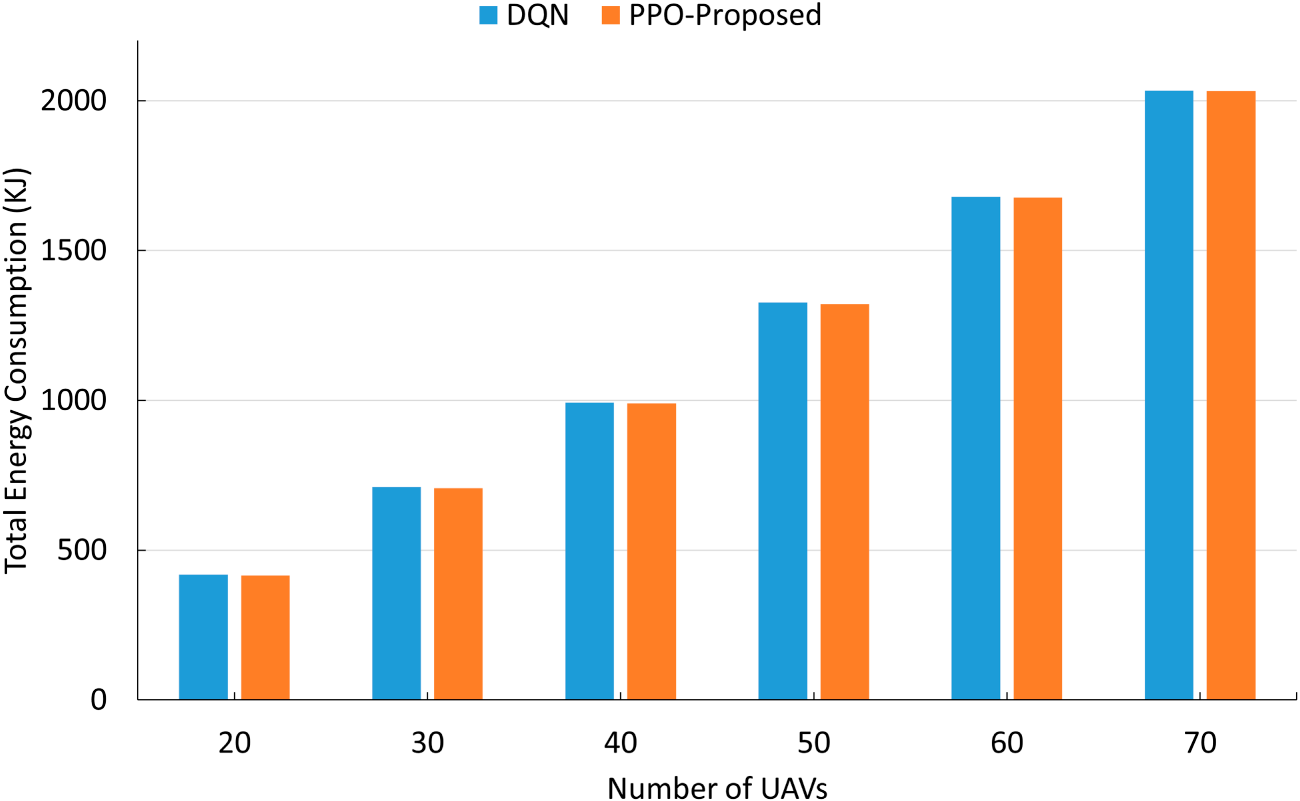
Figure 6: Energy consumption.
The above analyses demonstrate that civilian UAVs will increasingly contribute to countless human tasks. Besides, it also shows problems. We determine several challenges and potential research directions, as follows.
• Model Realism and 6G Integration: Future research should aim to couple PPO agents with the non-terrestrial networks and cell-free architectures envisioned for 6G. This requires explicit modeling of aerial-specific interference patterns, dynamic spectrum sharing, and mobility-induced Doppler effects [21].
• Multi-Agent Coordination: The cooperative routing problems, such as resource optimization in relay selection, power control, and medium access, can be modelled as a multi-agent PPO problem under the CTDE paradigm. This approach would extend recent advances in anti-jamming and trajectory planning to packet-level relaying policies for UAV swarms [12].
• Safety- and Regulation-Aware RL: Deployable FANETs must operate in strict compliance with airspace regulations such as no-fly zones, altitude corridors, and communication safety protocols. Applying constrained PPO variants, such as those employing Lagrangian or primal-dual surrogate objectives, alongside shielded exploration techniques, can enforce hard constraints on link loads, interference budgets, and geofences while preserving policy improvement guarantees [21].
• Energy and Lifecycle Modeling: Beyond communication overhead, propulsion energy is the primary factor in the operational budget of UAVs. A significant opportunity lies in the co-optimization of trajectory-aware routing policies with energy-saving mechanisms, such as duty cycling and wake-sleep schedules [14].
• Edge Intelligence and Privacy Preservation: Civilian applications such as disaster response and smart agriculture demand on-board learning with stringent latency and privacy requirements. Federated or on-device PPO frameworks, augmented with periodic policy distillation, can minimize backhaul dependency and mitigate data exfiltration risks while ensuring continuous adaptation to local conditions [16].
• Enhancing Robustness and Generalization: To develop policies that are resilient to unforeseen conditions, domain randomization across mobility, traffic, and channel models should be systematically paired with risk-sensitive objectives. This combination is critical for mitigating high-impact tail events, such as congestion bursts and catastrophic link failures.
• Simulations to Real-world Applications: Validation through flight trials incorporating real radio hardware is indispensable. Such experiments are necessary to verify sample efficiency, assess stability under real-time topological churn, and confirm compatibility with standard routing stacks, thereby closing the critical sim-to-real gaps [22].
This work presented a reinforcement learning–driven routing strategy for FANETs, referred to as PPO-Proposed. The proposed scheme enhances the relay node selection mechanism by jointly considering multiple network performance indicators, including channel reliability, remaining energy, and communication latency, within a Proximal Policy Optimization (PPO) learning framework. Simulation-based evaluations indicate that the proposed protocol achieves a higher packet delivery ratio while simultaneously reducing end-to-end delay compared to the baseline DQN-based routing approach. These performance gains highlight the effectiveness of the proposed method in dense and highly mobile UAV network environments. In the future, we will explore the incorporation of advanced RL paradigms, such as multi-agent RL and federated learning, to further improve network scalability, robustness, and data privacy. Such enhancements are expected to facilitate practical deployment in civilian scenarios and emerging 6G-enabled Internet of Things applications, including intelligent transportation systems, emergency management, and large-scale urban sensing.
Acknowledgement: None.
Funding Statement: This research is funded by Hung Yen University of Technology and Education under grant number UTEHY.L.2026.05.
Author Contributions: The authors confirm contributions to the paper as follows: study conception and design: Chu Thi Minh Hue and Nguyen Minh Quy; data collection: Chu Thi Minh Hue; analysis and interpretation of results: Nguyen Minh Quy; draft manuscript preparation: Chu Thi Minh Hue and Nguyen Minh Quy. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
1https://github.com/Andrea94c/DroNETworkSimulator
References
1. Xu W, Wang C, Xie H, Liang W, Dai H, Xu Z, et al. Reward maximization for disaster zone monitoring with heterogeneous UAVs. IEEE/ACM Trans Netw. 2024;32(1):890–903. doi:10.1109/tnet.2023.3300174. [Google Scholar] [CrossRef]
2. Qi S, Lin B, Deng Y, Chen X, Fang Y. Minimizing maximum latency of task offloading for multi-UAV-assisted maritime search and rescue. IEEE Trans Veh Technol. 2024;73(9):13625–38. doi:10.1109/tvt.2024.3384570. [Google Scholar] [CrossRef]
3. Akbari M, Syed A, Kennedy WS, Erol-Kantarci M. Constrained federated learning for AoI-limited SFC in UAV-aided MEC for smart agriculture. IEEE Trans Mach Learn Commun Netw. 2023;1:277–95. doi:10.1109/tmlcn.2023.3311749. [Google Scholar] [CrossRef]
4. Chen J, Wan P, Xu G. Cooperative learning-based joint UAV and human courier scheduling for emergency medical delivery service. IEEE Trans Intell Trans Syst. 2025;26(1):935–49. doi:10.1109/tits.2024.3486789. [Google Scholar] [CrossRef]
5. Li CM, Wu LC, Wang PJ. Integrated environment sensing and green communication for non-terrestrial network. IEICE Trans Commun. 2025;E108-B(7):851–8. doi:10.23919/transcom.2024ebp3166. [Google Scholar] [CrossRef]
6. Kumar VDA, Ramachandran V, Rashid M, Javed AR, Islam S, Al Hejaili A. An intelligent traffic monitoring system in congested regions with prioritization for emergency vehicle using UAV networks. Tsinghua Sci Technol. 2025;30(4):1387–400. doi:10.26599/tst.2023.9010078. [Google Scholar] [CrossRef]
7. Xu J, Xu X, Cui G, Bilal M, Gu R, Dou W, et al. A privacy-preserving auction for task offloading and resource allocation in UAV-assisted MEC. IEEE Trans Mobile Comput. 2025;25(2):2611–26. doi:10.1109/tmc.2025.3609202. [Google Scholar] [CrossRef]
8. Toka L, Konrad M, Pekar A, Biczók G. Integrating the skies for 6G: techno-economic considerations of LEO, HAPS, and UAV technologies. IEEE Commun Mag. 2024;62(11):44–51. doi:10.1109/mcom.003.2400120. [Google Scholar] [CrossRef]
9. Nazib RA, Moh S. Reinforcement learning-based routing protocols for vehicular Ad Hoc networks: a comparative survey. IEEE Access. 2021;9:27552–87. doi:10.1109/access.2021.3058388. [Google Scholar] [CrossRef]
10. Mansoor N, Hossain MI, Rozario A, Zareei M, Rodriguez-Arreola A. A fresh look at routing protocols in unmanned aerial vehicular networks: a survey. IEEE Access. 2023;11:66289–308. doi:10.1109/access.2023.3290871. [Google Scholar] [CrossRef]
11. Wang X, Ning Z, Guo S, Wen M, Guo L, Poor HV. Dynamic UAV deployment for differentiated services: a multi-agent imitation learning based approach. IEEE Trans Mobile Comput. 2023;22(4):2131–46. doi:10.1109/tmc.2021.3116236. [Google Scholar] [CrossRef]
12. Lv Z, Xiao L, Du Y, Niu G, Xing C, Xu W. Multi-agent reinforcement learning based UAV swarm communications against jamming. IEEE Trans Wirel Commun. 2023;22(12):9063–75. doi:10.1109/twc.2023.3268082. [Google Scholar] [CrossRef]
13. Ning Z, Wang X, Song Q, Guo L, Wen M, Guo S, et al. Multi-agent deep reinforcement learning based UAV trajectory optimization for differentiated services. IEEE Trans Mobile Comput. 2024;23(5):5818–34. doi:10.1109/tmc.2023.3312276/mm1. [Google Scholar] [CrossRef]
14. Gong H, Huang B, Jia B. Energy-efficient 3-D UAV ground node accessing using the minimum number of UAVs. IEEE Trans Mobile Comput. 2024;23(12):12046–60. doi:10.1109/tmc.2024.3405494. [Google Scholar] [CrossRef]
15. Zheng X, Sun G, Li J, Liang S, Wu Q, Jin M, et al. Reliable and energy-efficient communications via collaborative beamforming for UAV networks. IEEE Trans Wirel Commun. 2024;23(10):13235–51. doi:10.1109/mwc.001.2100677. [Google Scholar] [CrossRef]
16. Lee GH, Park H, Jang JW, Han J, Choi JK. PPO-based autonomous transmission period control system in IoT edge computing. IEEE Int Things J. 2023;10(24):21705–20. doi:10.1109/jiot.2023.3293511. [Google Scholar] [CrossRef]
17. Arulkumaran K, Deisenroth MP, Brundage M, Bharath AA. Deep reinforcement learning: a brief survey. IEEE Signal Proc Mag. 2017;34(6):26–38. doi:10.1109/msp.2017.2743240. [Google Scholar] [CrossRef]
18. Konda VR, Tsitsiklis JN. Actor-critic algorithms. SIAM J Control Optim. 2003;42(4):1143–66. [Google Scholar]
19. Schulman J, Wolski F, Dhariwal P, Radford A, Klimov O. Proximal policy optimization algorithms. arXiv:1707.06347. 2017. [Google Scholar]
20. Schulman J, Moritz P, Levine S, Jordan M, Abbeel P. High-dimensional continuous control using generalized advantage estimation. In: Proceedings of the 4th International Conference on Learning Representations (ICLR); 2016 May 2–4; San Juan, Puerto Rico. [Google Scholar]
21. Geraci G, Garcia-Rodriguez A, Azari MM, Lozano A, Mezzavilla M, Chatzinotas S, et al. What will the future of UAV cellular communications be a flight from 5G to 6G. IEEE Commun Surv Tutor. 2022;24(3):1304–35. doi:10.1109/comst.2022.3171135. [Google Scholar] [CrossRef]
22. Cao P, Lei L, Cai S, Shen G, Liu X, Wang X, et al. Computational intelligence algorithms for UAV swarm networking and collaboration: a comprehensive survey and future directions. IEEE Commun Surv Tutor. 2024;26(4):2684–728. doi:10.1109/comst.2024.3395358. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools