
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
A New Approach for Topology Control in Software Defined Wireless Sensor Networks Using Soft Actor-Critic
1 Faculty of Information Technology, University of Sciences, Hue University, 77 Nguyen Hue, Hue, Vietnam
2 Faculty of Information Technology, Ho Chi Minh City University of Industry and Trade, 140 Le Trong Tan Street, Tay Thanh Ward, Tan Phu District, Ho Chi Minh City, Vietnam
3 Faculty of Business and Technology, Phu Xuan University, 28 Nguyen Tri Phuong, Hue, Vietnam
4 Faculty of Information Technology, Ha Noi University of Business and Technology, Hanoi, Vietnam
* Corresponding Author: Le Huu Binh. Email:
(This article belongs to the Special Issue: AI-Driven Next-Generation Networks: Innovations, Challenges, and Applications)
Computers, Materials & Continua 2026, 87(2), 55 https://doi.org/10.32604/cmc.2026.075549
Received 03 November 2025; Accepted 04 January 2026; Issue published 12 March 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Wireless Sensor Networks (WSNs) play a crucial role in numerous Internet of Things (IoT) applications and next-generation communication systems, yet they continue to face challenges in balancing energy efficiency and reliable connectivity. This study proposes SAC-HTC (Soft Actor-Critic-based High-performance Topology Control), a deep reinforcement learning (DRL) method based on the Actor-Critic framework, implemented within a Software Defined Wireless Sensor Network (SDWSN) architecture. In this approach, sensor nodes periodically transmit state information, including coordinates, node degree, transmission power, and neighbor lists, to a centralized controller. The controller acts as the reinforcement learning (RL) agent, with the Actor generating decisions to adjust transmission ranges, while the Critic evaluates action values to reflect the overall network performance. The bidirectional Node-Controller feedback mechanism enables the controller to issue appropriate control commands to each node, ensuring the maintenance of the desired node degree, reducing energy consumption, and preserving network connectivity. The algorithm further incorporates soft entropy adjustment to balance exploration and exploitation, along with an off-policy mechanism for efficient data reuse, making it well-suited to the resource-constrained conditions of WSNs. Simulation results demonstrate that SAC-HTC not only outperforms traditional methods and several existing RL algorithms but also achieves faster convergence, optimized communication range control, global connectivity maintenance, and extended network lifetime. The key novelty of this research lies in the integration of the SAC method with the SDWSN architecture for WSNs topology control, providing an adaptive, efficient, and highly promising mechanism for large-scale, dynamic, and high-performance sensor networks.Keywords
WSNs consist of numerous low-power sensor nodes deployed across diverse environments to collect and transmit data for applications such as environmental monitoring, smart cities, and automation systems. Each node integrates sensing, processing, and communication modules but operates under stringent energy constraints, making energy management a critical challenge. Optimizing the transmission range plays a vital role, as a larger range enhances connectivity but consumes more energy, while a smaller range conserves energy but risks network disconnection. Adjusting the transmission range to obtain an optimal network topology constitutes an NP-hard problem, meaning that no exact solution can be found within polynomial-time complexity. Therefore, the topology control problem is commonly addressed using approximate optimization methods, such as graph theory-based approaches [1–4], RL [5–7], and deep learning networks [8].
Using graph theory, the authors in [2–4] have proposed several topology control solutions. Among them, LTRT (Local Tree-based Reliable Topology) is a locally tree-based topology constructed through four stages, iteratively building a spanning tree and deleting redundant links until boundary connectivity is achieved, aiming for low node degree, limited communication range, and low computational complexity [2]. Another approach to addressing the topology control problem is the use of RL. In this method, the authors in [5–7] applied RL to tackle challenges in wireless networks. For the NP-hard Router Node Placement (RNP) problem in Wireless Mesh Networks (WMNs), a novel RL-based approach was proposed, modeling RNP as an RL process. This represents the first study to apply RL to the RNP problem, demonstrating an improvement in network connectivity of up to 22.73% compared to recent methods [5]. In the context of network structure control for 5G Mobile Ad-hoc Network (MANET), the TFACR (Topology Formation via Adaptive Communication Radius) algorithm was introduced. TFACR flexibly adjusts the communication range to achieve the desired node degree, balance node degrees across the network, and outperform other algorithms in terms of average node degree, transmission quality, and energy consumption when evaluated against protocols such as RLRP (RL-based routing protocol), AODV (Ad-hoc on-demand distance vector), and DSDV (Destination sequenced distance vector) [6]. Synthesizing these studies reveals that the topology control problem in SDWSN is influenced by four main research directions: (i) the group of works directly related to SDWSN such as [9–11], which establish the foundation for centralized topology control based on Software-Defined Networking (SDN) combined with RL to optimize energy and node degree; (ii) the WSNs/UAV (Unmanned Aerial Vehicle)/MANET group such as [12–14], which extends RL/DRL solutions for position and range optimization, providing algorithms transferable to SDWSN; (iii) the DRL algorithm group [15,16], which provides modern theoretical foundations such as SAC, Deep Deterministic Policy Gradient (DDPG), and multi-agent RL for the development of intelligent topology controllers; Overall, these directions complement each other, forming a comprehensive foundation for developing adaptive, energy-efficient, and scalable topology control mechanisms in modern SDWSN.
Related studies have focused on optimizing topology and communication in WSNs through UAV-assisted networking and distributed game-theoretic control [3,4], RL-based topology control for power grids and sensor networks [7,17], as well as energy-efficient routing solutions leveraging RL, multi-agent RL, blockchain, and meta-heuristic algorithms [18–22]. In addition, several works have exploited RL for deployment and three-dimensional coverage optimization in WSNs/UWSN (Underwater wireless sensor network) scenarios [23,24], or integrated hybrid AI (Artificial Intelligence) models such as Attention, TinyML (Machine Learning on Tiny Devices), and Quantum-RL to further enhance performance and scalability in next-generation sensor networks [25].
Building upon the studies reviewed above, a growing body of recent work has leveraged RL and DRL to enable adaptive topology control and routing based on network state information, thereby reducing energy consumption, balancing network load, and improving quality of service in wireless sensor networks [26–30]. In parallel with learning-based approaches, another research stream focuses on topology control through clustering structures, chain-based communication, depth adjustment, and energy-aware heuristics to preserve network connectivity, achieve balanced energy distribution, and extend network lifetime [31–34]. At the architectural level, studies grounded in SDWSN propose centralized or hybrid AI-assisted topology control mechanisms to reduce control overhead, optimize routing decisions, enhance scalability, and improve energy efficiency in large-scale WSNs deployments [35–38].
Recognizing the effectiveness of RL methods, our research group proposed DQPLET (Deep Q-learning-based Path loss and Energy-efficient Topology Control) [8] to address the limitations in stability and convergence of graph optimization and basic RL approaches in WSNs. DQPLET integrates Deep Q-learning (DQL) with the Levenberg-Marquardt (LM) algorithm to adjust communication ranges, thereby optimizing network topology and energy efficiency. Simulation results demonstrate that DQPLET outperforms other methods in terms of average node degree and transmission quality. However, DQPLET, being a value-based DQL approach, exhibits potential instability when operating in large-scale, complex, and dynamic network environments. These drawbacks serve as the foundation for the development of SAC-HTC, an algorithm based on the Actor-Critic (policy-based) architecture combined with soft entropy adjustment, designed to achieve faster convergence, efficient data reuse (off-policy), and more stable global performance. The novel contributions of this work are summarized as follows:
(i) Propose SAC-HTC, a network topology control algorithm. It is based on the SAC framework and SDWSN architecture. The algorithm is designed to optimize energy consumption, transmission range, and network connectivity.
(ii) Conduct simulations to evaluate performance metrics such as average node degree, energy consumption, transmission range, and connectivity maintenance capability, thereby demonstrating the advantages of the proposed approach.
The remainder of this paper is organized as follows: Section 2 describes the proposed network topology control model; Section 3 presents the SAC-HTC algorithm in detail, including modeling, agent-environment interactions, and the training process; Section 4 outlines the simulation setup, compares SAC-HTC with MaxPower, DQPLET, and LTRT, and evaluates performance through metrics such as node degree, energy efficiency, and Path loss; finally, Section 5 summarizes the results, discusses the advantages, and proposes future research directions.
2.1 Architecture of SDWSN in Machine Learning
The SDWSN architecture in machine learning is organized into three layers: data, control, and application. At the data layer, sensor nodes are responsible only for collecting and transmitting packets according to the controller’s rules, thereby reducing processing overhead and increasing flexibility. The control layer functions as an intelligent central unit that manages topology, monitors node status, handles routing, and adjusts transmission power based on machine learning policies, while the application layer performs energy optimization, security enhancement, and load balancing through northbound and southbound APIs (Application Programming Interface). The machine learning model can be integrated within the controller or deployed at the application layer to collect data on sensing, energy, latency, and topology, then perform training and inference to predict or make control decisions. The operational cycle involves real-time data collection, processing via machine learning algorithms (supervised, unsupervised, or RL), and converting results into control commands sent to nodes, enabling the network to self-adapt and optimize performance. Leveraging global network observations from the controller reduces control packet overhead, enhances energy efficiency, minimizes latency, and automates decision-making, while online, transfer, and RL mechanisms help maintain system stability, intelligence, and scalability [26].
2.2 General Operational Principles of Topology Control Algorithms in SDWSN
Topology control in SDWSN is the process in which the central controller utilizes global information about node status and positions to automatically design, maintain, and optimize the network structure, ensuring connectivity, load balancing, and energy efficiency. The controller collects real-time data, constructs a connectivity graph, and applies optimization or machine learning algorithms such as clustering, regression, and DRL to identify critical nodes, isolate them, and adjust transmission ranges so that the network maintains connectivity with minimal energy consumption. This process consists of three phases: monitoring, analysis, and action, in which the machine learning model predicts link variations and supports network reconfiguration decisions by updating routing, modifying transmission power, or activating nodes. RL mechanisms are employed to optimize the control policy based on a reward function that considers energy, latency, and node degree, allowing the network to gradually learn the optimal state. By separating the control and data planes, SDWSN enables global management, reduces processing overhead on sensor nodes, and prevents network fragmentation. Moreover, the controller can predict topology variations to perform proactive adjustments, providing self-healing and dynamic reconfiguration capabilities toward intelligent, stable, and energy-efficient WSNs [26].
3 The SAC-HTC Method for SDWSN
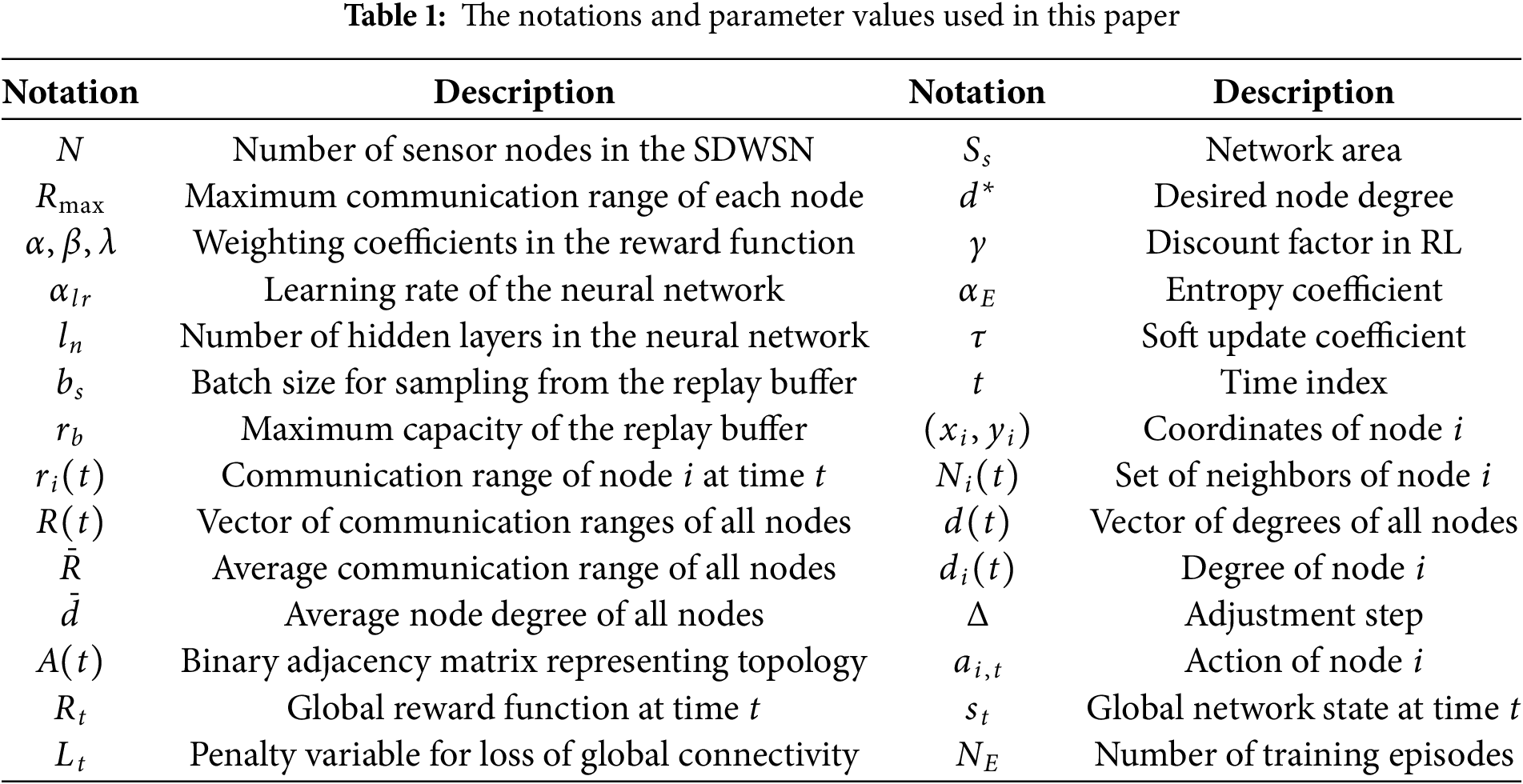
To ensure clarity and consistency throughout the presentation, all symbols and notations used in this study are explicitly defined and summarized in Table 1.
SAC is a modern DRL method that integrates deep neural networks with RL mechanisms to optimize action policies, approximating the Q-function (Critic), value function (Value), and policy (Actor), enabling the model to operate efficiently in complex continuous state and action spaces. This algorithm belongs to the Actor-Critic family, which maintains parallel components: the Actor learns to select actions, while the Critics learn to evaluate state-action values. At the same time, it applies the entropy maximization principle to encourage controlled randomness in actions, thereby improving exploration capability and training stability. As a result, SAC has become one of the most powerful and advanced DRL algorithms, particularly suitable for continuous optimal control problems such as communication range adjustment in WSNs [13,20].
3.2 Modeling SAC-HTC for the Topology Control Problem in SDWSN
Environment: The SDWSN in the topology control problem is modeled as a set of N sensor nodes distributed in a two-dimensional space, each with a transmission radius
Agent: In the SAC-HTC-based topology control of SDWSN, the centralized controller functions as the learning agent, collecting local state data from sensor nodes, including coordinates, node degree
State at a sensor node: The state of node
where
Global network state: Let N be the number of nodes; at time
where
Reward: The reward function is designed as follows:
where
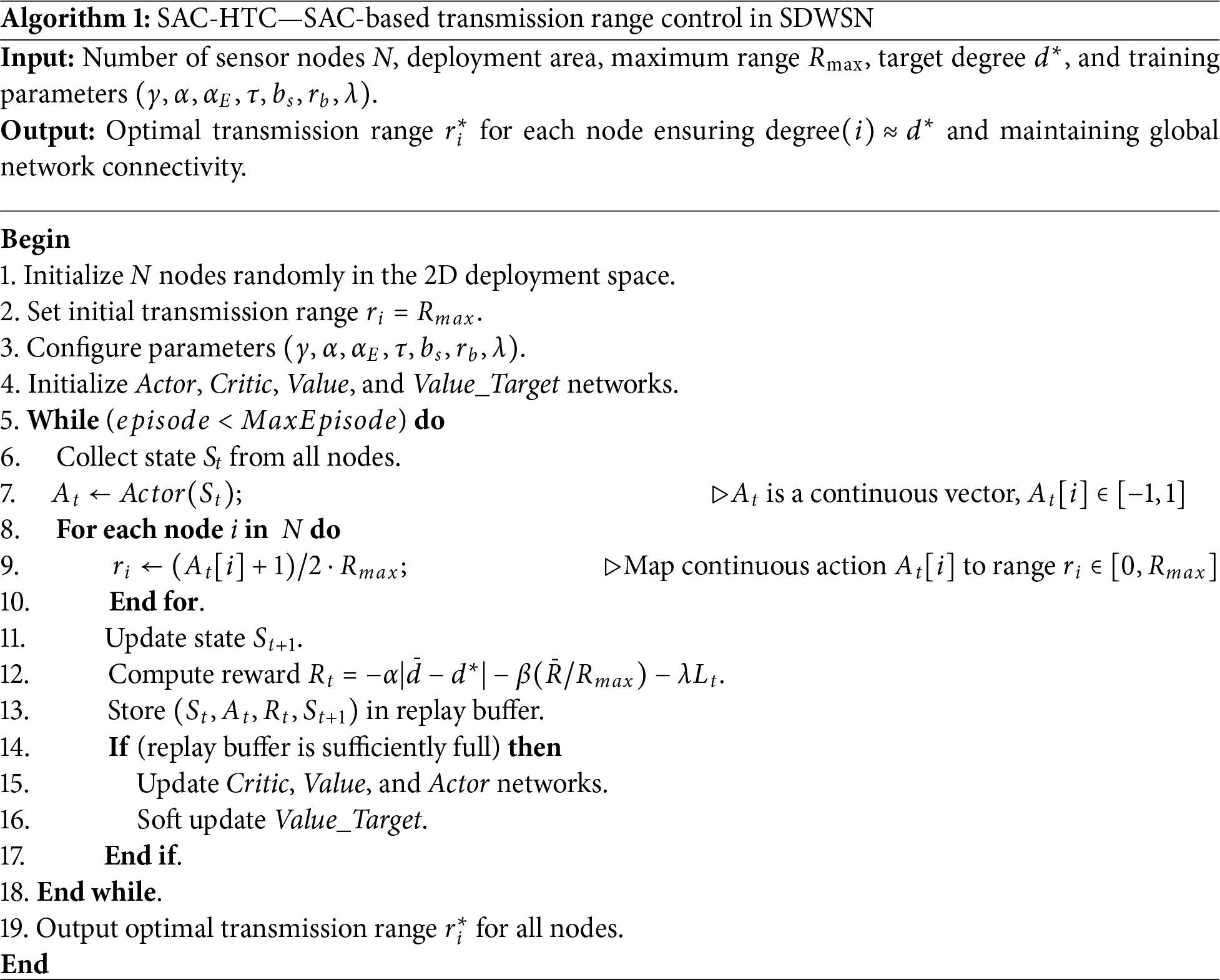
Algorithm 1 presents the pseudocode of the proposed SAC-HTC algorithm, which optimizes sensor-node transmission power to maintain the node degree near the target while preserving global connectivity; after initializing deployment parameters and DRL settings, nodes are distributed, assigned initial power, and iteratively report local states including coordinates, degree from Hello packets, power level, and neighbor lists to the Controller, which aggregates these data, verifies connectivity, and updates the global network state. Based on this, the Actor network generates a continuous action value for adjusting the transmission power of each node. This action, typically a scalar value (e.g., in the range [−1, 1]), is then mapped to a specific transmission power level in the valid operational range [0, Rmax], and the corresponding commands are sent to the nodes. Exploration noise is added during training, and nodes update power levels, recalculate degrees, and send back new states for reward evaluation, which considers degree deviation, energy efficiency, and connectivity penalties. All interactions are stored in a replay buffer for stable learning, while the SAC model is refined through mini-batch sampling, soft updates to the Value target network, dual-Critic Q-value estimation, and entropy-regularized updates to the Value and Actor networks. Once convergence is achieved, the learned policy is applied to maintain the desired average node degree, reduce energy consumption, and preserve connectivity, demonstrating SAC-HTC’s effectiveness in centralized WSNs resource management under the SDWSN framework.
4 Simulation Results and Discussion
All SAC-HTC experiments were implemented in MATLAB R2024 using the Deep Learning Toolbox™ for constructing and training neural networks. Simulations were executed on a standard workstation (Intel Core i7, 64 GB RAM) without GPU acceleration. Owing to the compact network architecture (<1 MB for
In simulations with networks of 50 to 100 sensor nodes, SAC-HTC maintains a compact model and low computational cost, making it suitable for medium-scale WSNs. The neural network architecture includes three hidden layers with 64 units each, comprising five sub-networks (one Actor, two Critics, and two Value networks) with approximately 84,000 parameters, where the Actor receives
since both
The reward weight parameters
The experiments are conducted within a two-dimensional area of 1000
The study applies the Free-Space Path loss (FSPL) model with a fixed Path loss exponent
where
Fig. 1 compares the ability of MaxPower, LTRT, DQPLET, and SAC-HTC to maintain an average node degree near the target value of 4 as the network size increases from 50 to 90 nodes. The results show clear differences in accuracy and stability. MaxPower deviates the most, with the average node degree ranging widely from 8.32 to 14.96 two to nearly four times above the target and displaying strong sensitivity to network scale. LTRT is more stable but consistently maintains values between 7.04 and 7.91, almost double the desired degree. In contrast, DQPLET and SAC-HTC show high precision and stability. DQPLET keeps the average node degree between 4.32 and 4.35, with a small and consistent relative error of about 8%–8.75%. SAC-HTC achieves the best performance, maintaining values between 4.27 and 4.30, corresponding to the smallest deviation (0.27–0.30) and the lowest relative error of roughly 6.75%–7.5%. Both methods exhibit strong convergence, but SAC-HTC converges closest to the target and shows the narrowest variation interval (0.03), indicating higher robustness.
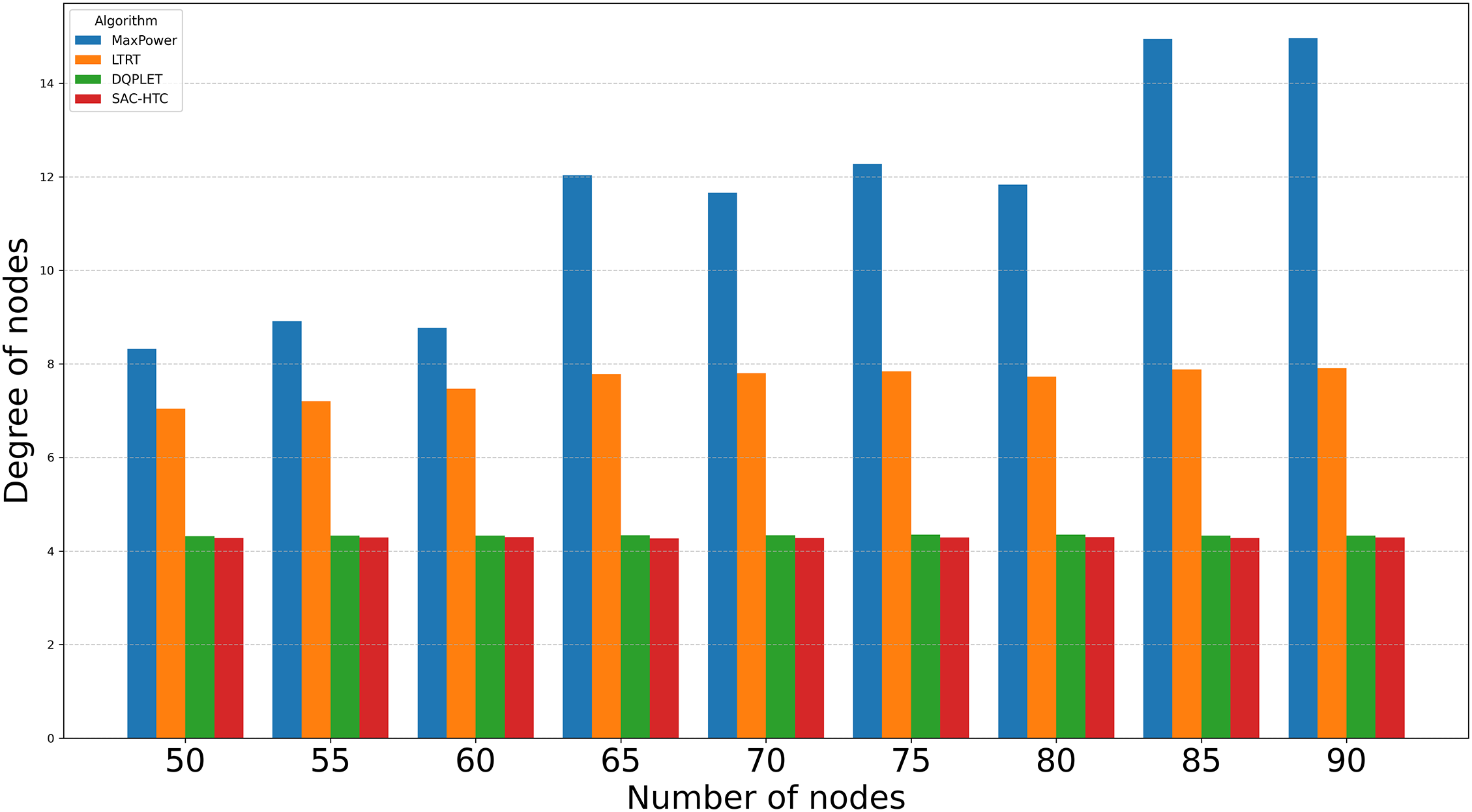
Figure 1: Average node degree vs. the nunber of nodes
A detailed analysis of the Fig. 2 data reveals that both SAC-HTC and DQPLET converge toward the desired node degree of 4; however, SAC-HTC demonstrates significantly higher stability and uniformity. Specifically, the average node degree achieved by DQPLET is approximately 4.34 with a standard deviation of 0.014, while SAC-HTC attains a slightly lower mean value of about 4.285 but with a smaller deviation of 0.009, indicating a more consistent distribution of node degrees and reduced fluctuation across training iterations. In terms of degree distribution, DQPLET exhibits three out of nine samples exceeding the target (above 4.3), one below 4.3, and the remainder concentrated between 4.33 and 4.35, suggesting that several nodes still maintain excessive connectivity, leading to inefficient energy utilization. Conversely, SAC-HTC records only two instances below 4.28 and one above 4.30, meaning that most nodes remain tightly clustered around the target value, effectively balancing connectivity and energy efficiency. Regarding convergence behavior, the SAC-HTC curve exhibits narrow oscillations within the range of 4.27–4.30, whereas DQPLET fluctuates more broadly between 4.32 and 4.35, confirming that SAC-HTC reaches a stable equilibrium more rapidly and maintains steadier performance. These observations demonstrate that SAC-HTC not only achieves node-degree convergence closer to the intended value but also better regulates deviations among nodes, minimizing both under-connected and over-connected cases, thereby optimizing network structure and energy consumption. Overall, SAC-HTC consistently maintains an average node degree near the target with smaller variance and a more balanced distribution, affirming its superiority over DQPLET in ensuring network stability, reducing power expenditure, and enhancing the structural consistency of WSNs.
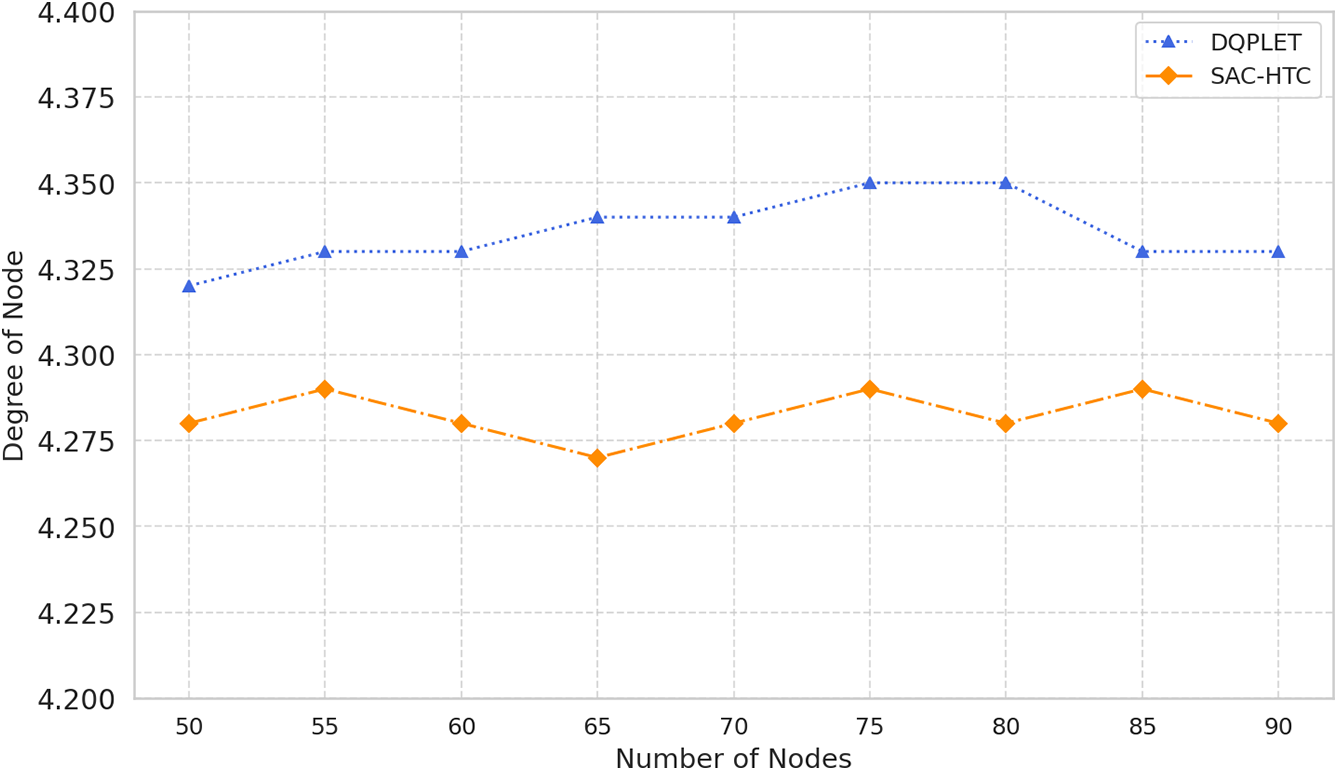
Figure 2: Compare the average node degree of DQPLET and SAC-HTC algorithms
To further clarify the advantages of SAC-HTC over DQPLET in large-scale environments, we conducted experiments with a network size of N = 200 nodes (Fig. 3). The quartile analysis of node degree indicators for the two algorithms reveals a clear distinction in terms of convergence and stability around the target node degree of 4. Specifically, for the DQPLET algorithm, the quartile values are first quartile (Q1) = 4.0, second quartile (Q2) = 5.0, and third quartile (Q3) = 6.0, with an interquartile range (IQR) of 2.0 and an average value of 4.91, indicating a right-skewed distribution where most nodes maintain higher-than-necessary connectivity levels. In contrast, SAC-HTC achieves Q1 = 3.0, Q2 = 4.0, and Q3 = 5.0 with the same IQR = 2.0 but a lower mean value of 4.27, which is much closer to the desired degree. This reflects SAC-HTC’s ability to perform precise and balanced adjustments, with 50% of the nodes having degrees within the range [3,5] a narrower and more concentrated distribution compared to the [4,6] range observed in DQPLET. These results demonstrate that SAC-HTC not only maintains a stable network structure but also minimizes redundant connections, thereby improving energy efficiency and ensuring more optimal communication performance. Overall, across all statistical indicators, SAC-HTC exhibits superior precision, convergence behavior, and adaptability in transmission range control compared to DQPLET.
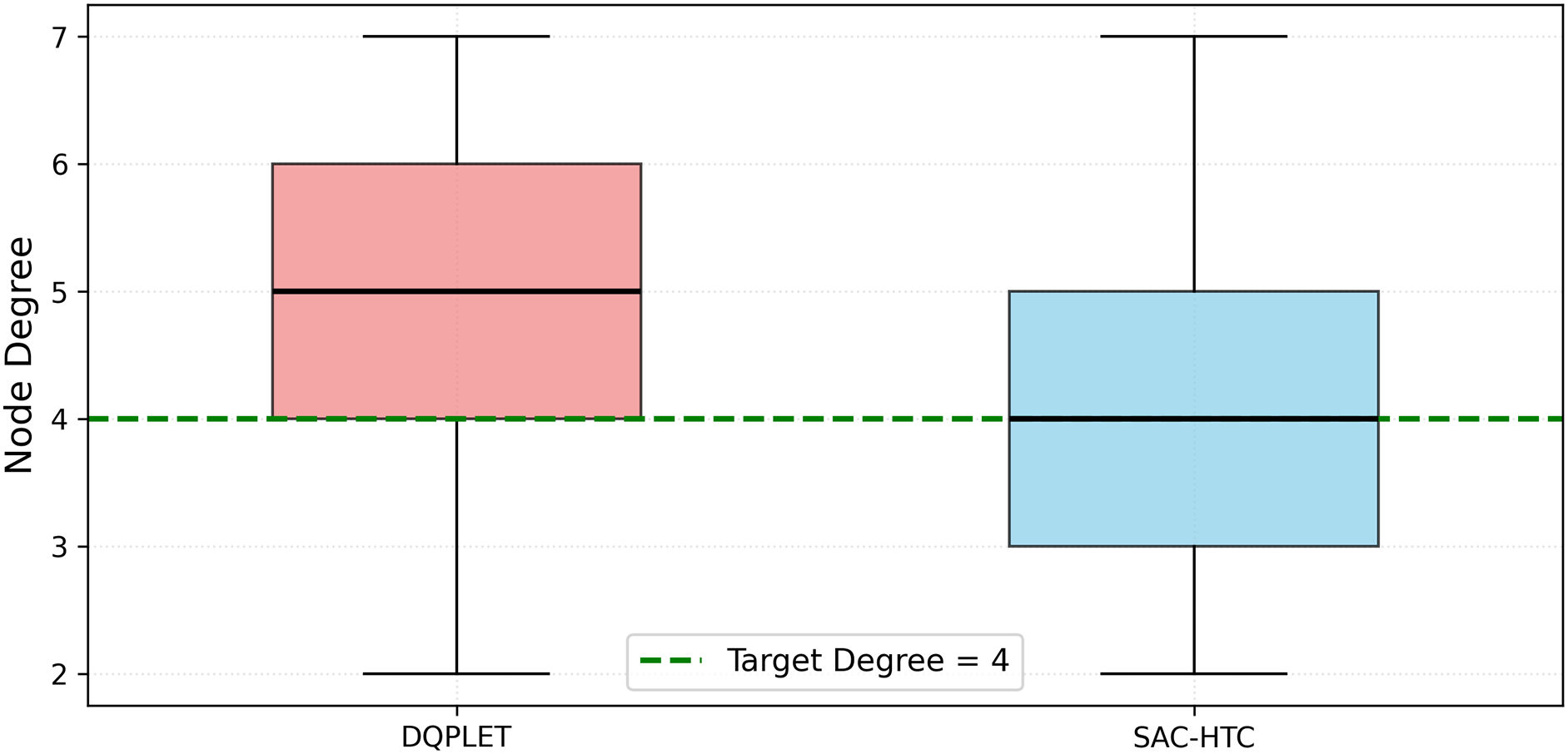
Figure 3: Compare the node degree distributions of DQPLET and SAC-HTC algorithms in case of 200 nodes
Based on the simulation data with 300 nodes, over 120 training episodes, and thousands of iterative steps per episode, the results reveal a significant difference in the convergence capability between the DQPLET and SAC-HTC algorithms in adjusting the node degree toward the desired value of 4 (Fig. 4). In the initial stage, both algorithms exhibit relatively high average node degrees (
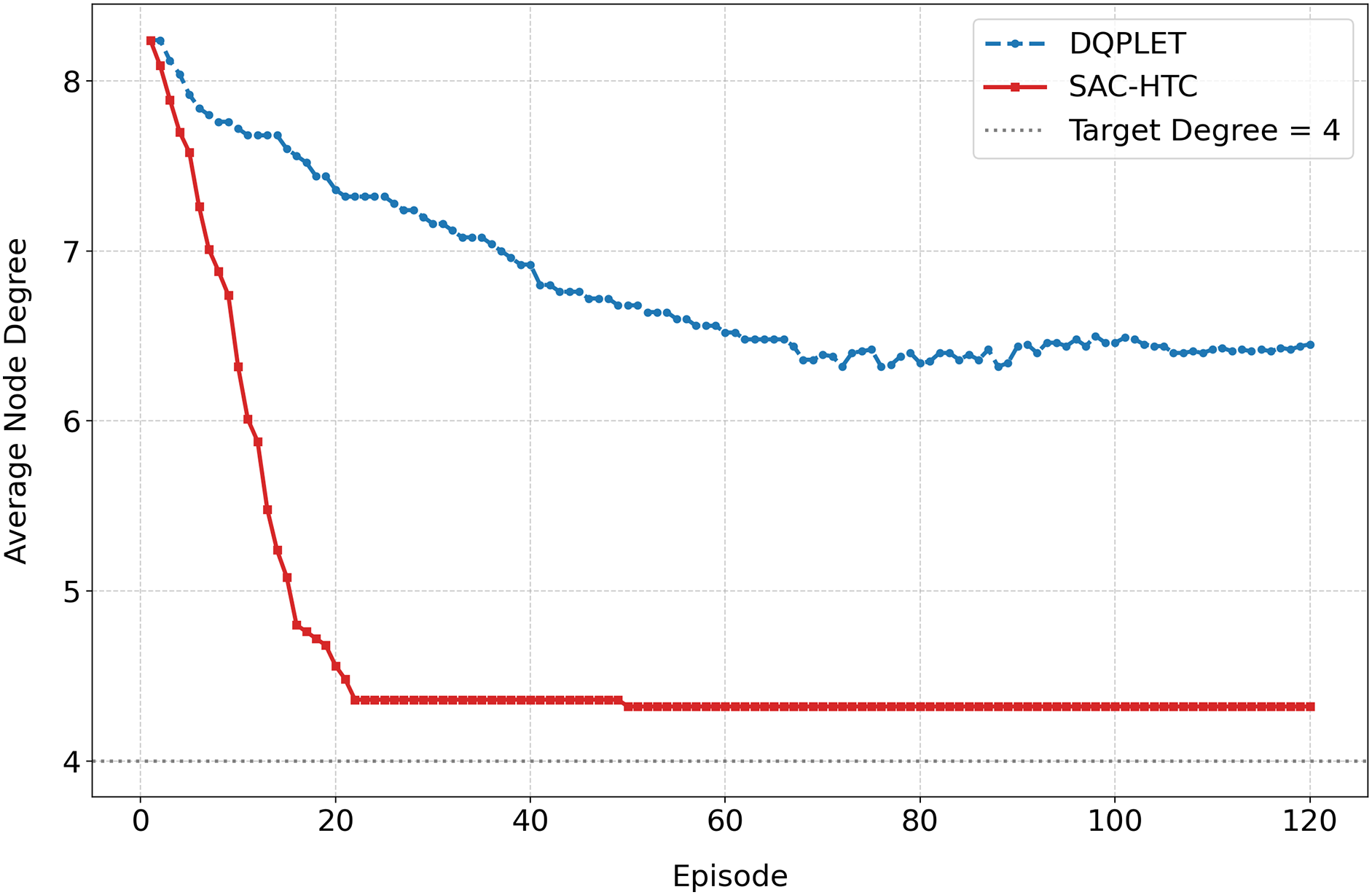
Figure 4: Average node degree vs. training episodes in case of 300 nodes
The EER results in Fig. 5 further highlight the performance differences among the four methods. SAC-HTC achieves the lowest average EER at 38.995%, indicating more effective control of transmission range and closer convergence of the average node degree to the target value. Its distribution is compact, ranging from 28.92% to 48.88%, with most samples clustered within 36%–45%, reflecting stable behavior and a relatively small standard deviation across trials. MaxPower, by contrast, consistently yields an EER of 100%, confirming the absence of power control and severe energy inefficiency. LTRT shows a higher average EER of 68.483% and a wide spread between 57.09% and 79.46%, indicating weak regulation and large variability. DQPLET performs closer to SAC-HTC, with an average of 40.011% and a concentration in the 39%–49% interval, but still presents slightly higher values and broader variation, reflecting less precise degree control. Overall, the narrow box of SAC-HTC demonstrates stronger convergence, lower dispersion, and better energy efficiency, making it the most consistent and accurate method among the evaluated approaches.
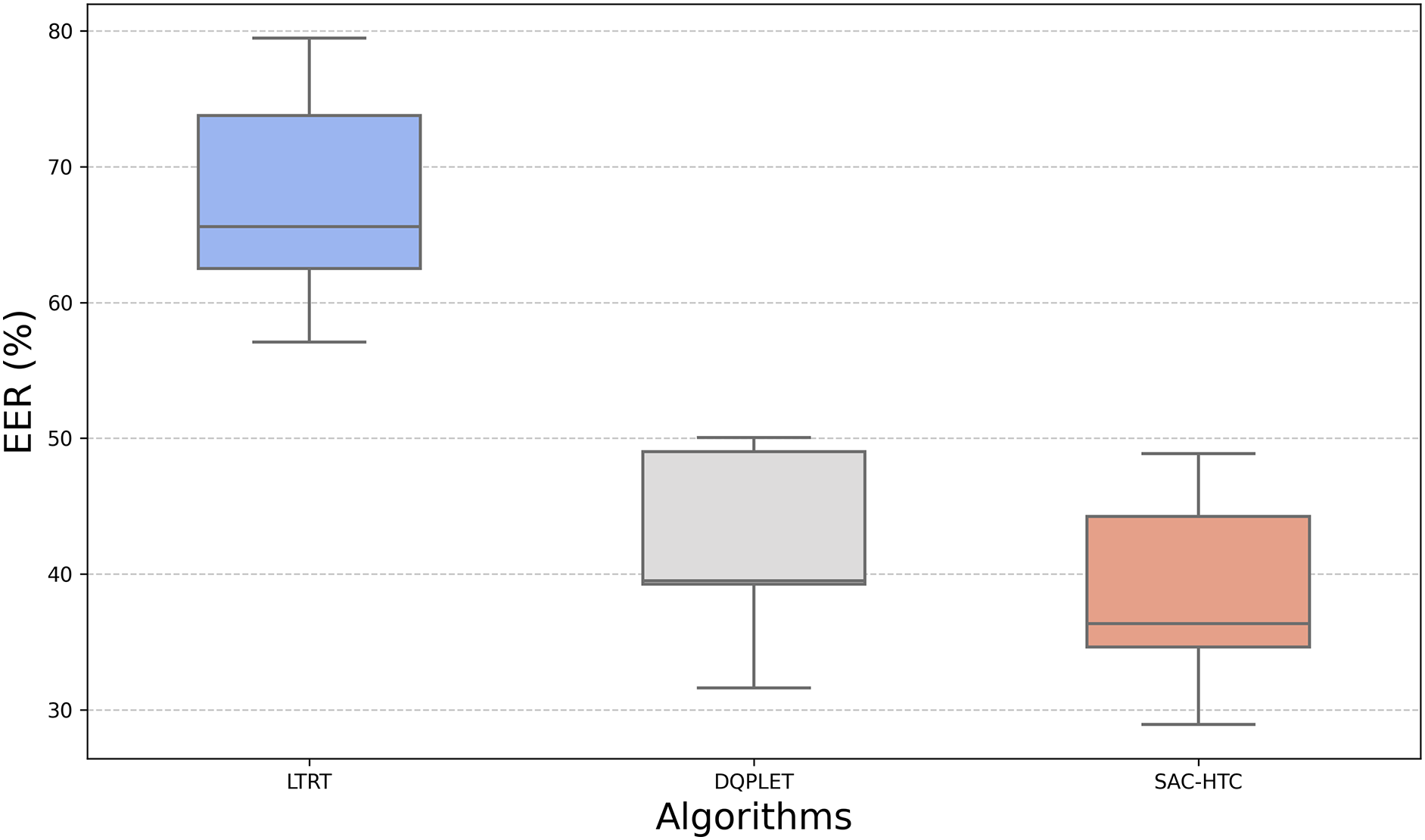
Figure 5: Compare the EER distributions of LTRT, DQPLET and SAC-HTC algorithms
The EER behavior under varying network sizes, illustrated in Fig. 6, reinforces the superiority of SAC-HTC. Across node counts from 50 to 90, SAC-HTC consistently maintains the lowest and most stable EER, ranging from 28.92% to 48.88%. This narrow band indicates strong convergence, small standard deviation, and effective control of transmission range while keeping the average node degree close to the target. Its radar curve remains compact and centered, reflecting minimal deviation and high energy efficiency. MaxPower, by contrast, remains fixed at 100% regardless of network size, confirming its inability to adapt and its complete lack of energy savings. LTRT exhibits high variability, with EER values between 57.09% and 79.46%, demonstrating limited adjustment capability and frequent degree overshooting. DQPLET performs better than LTRT and MaxPower, with values from 31.62% to 50.05%, but still shows higher average EER and weaker convergence than SAC-HTC.
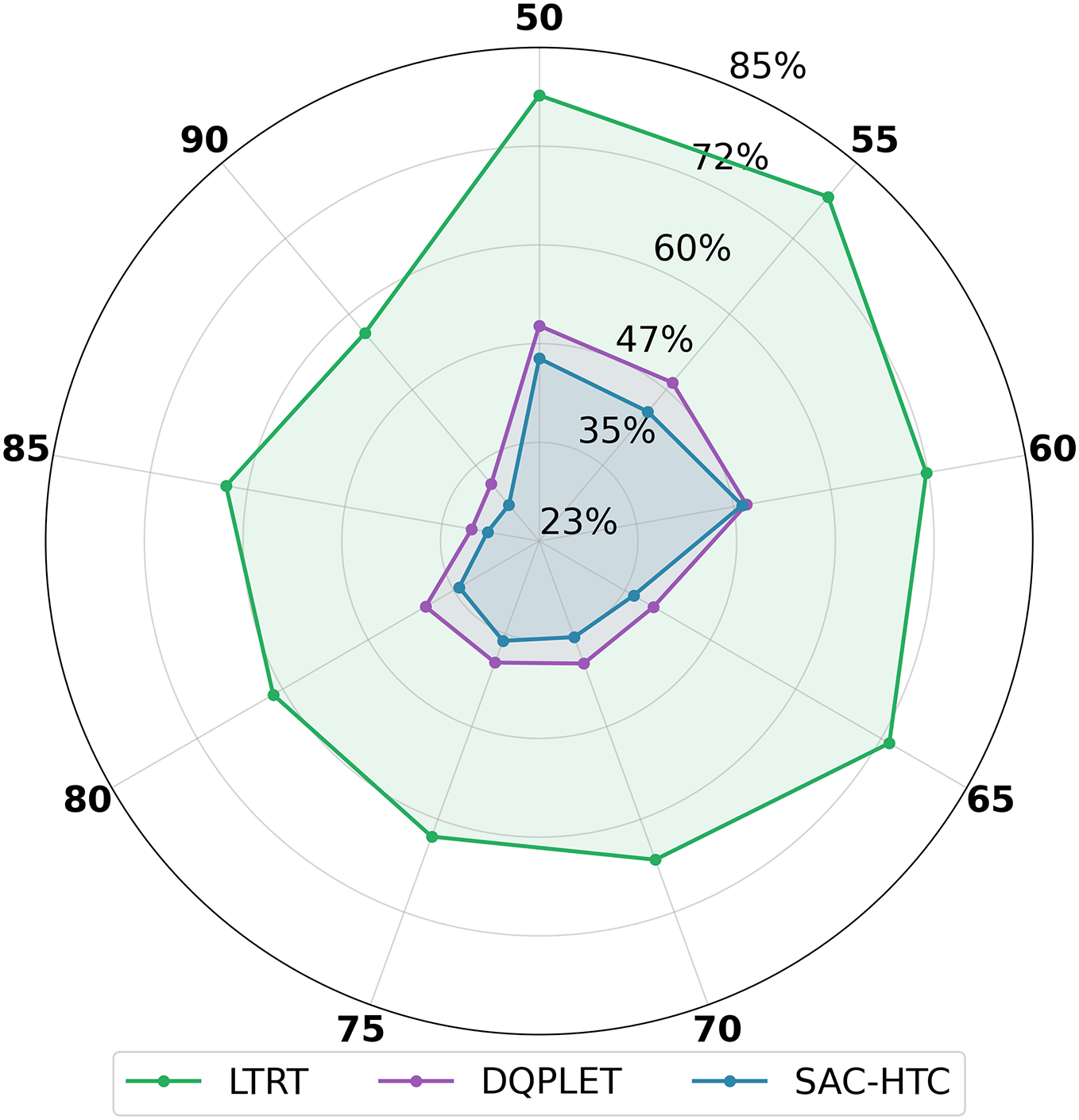
Figure 6: Compare the EER distributions of LTRT, DQPLET and SAC-HTC algorithms using radar chart
The evaluation of the EER across varying network scales is detailed in the line chart shown in Fig. 7. SAC-HTC consistently demonstrates superior energy management, exhibiting a stable and continuous decline in EER from an initial 45.94% down to 28.92% as the network size increases. This trend confirms the algorithm’s effective control over transmission range, allowing the network to achieve and maintain optimal efficiency near the theoretical minimum. In direct contrast, the MaxPower baseline remains static at 100% EER across all scales, confirming continuous operation at maximum power and affirming its inherent energy inefficiency. Among the compared learning methods, DQPLET performed better than LTRT, with its EER decreasing from 50.05% to 32.38%. However, DQPLET consistently operates at a higher energy cost than SAC-HTC. LTRT showed limited optimization capability, maintaining significantly high EER values ranging from 79.00% down to 57.09%. The low magnitude and stability of the SAC-HTC curve validate that its continuous action space and entropy regularization mechanism effectively minimize redundant communication power settings, leading to the most reliable and optimal energy savings for scalable SDWSN.
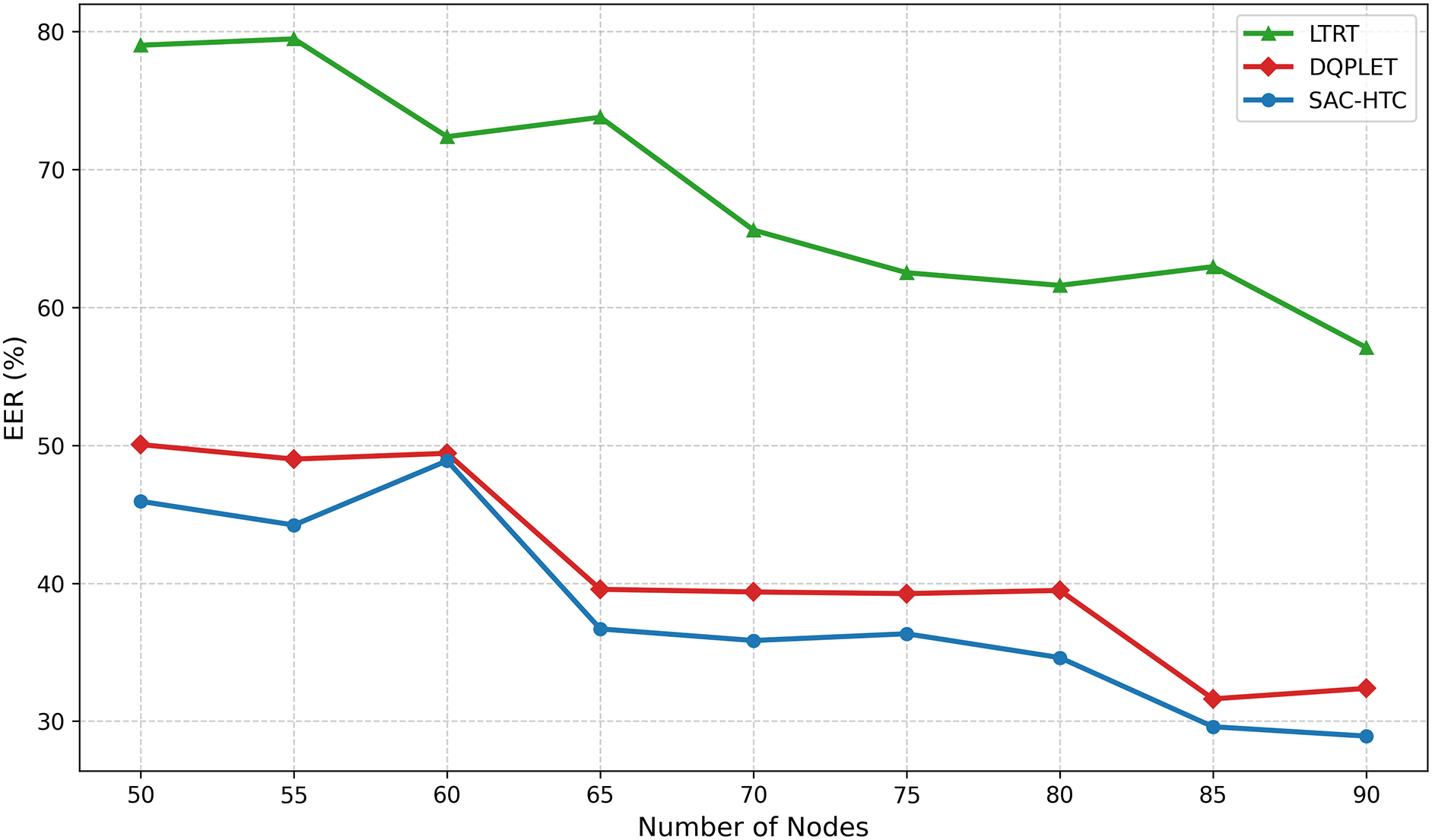
Figure 7: EER vs. the number of nodes
To confirm the advantages of SAC-HTC over DQPLET in terms of the Path loss index (Fig. 8), we conducted experiments on a network with N = 200 sensor nodes. The quartile analysis of the Path loss index for the two algorithms, SAC-HTC and DQPLET, reveals a significant difference in stability and communication efficiency within the wireless sensor network. Specifically, the median (Q2) value of SAC-HTC is 83.5 dB, which is notably lower than 84.8 dB for DQPLET, indicating a better ability to maintain lower and more stable signal attenuation. The Q1 and Q3 of SAC-HTC are 82.8 and 84.0 dB, respectively, while those of DQPLET are 83.8 and 85.2 dB, demonstrating that SAC-HTC exhibits a narrower and more concentrated central distribution. The IQR of SAC-HTC is 1.2, smaller than 1.4 for DQPLET, reflecting less data dispersion and greater overall network stability. Furthermore, the range of SAC-HTC varies from 81.2 to 84.4 dB, whereas DQPLET spans from 82.3 to 85.5 dB, showing that SAC-HTC achieves better consistency in signal attenuation among nodes. Overall, the quartile-based indicators confirm that SAC-HTC not only reduces the average Path loss but also maintains higher communication stability, thereby enhancing energy efficiency and reliability across the wireless sensor network.
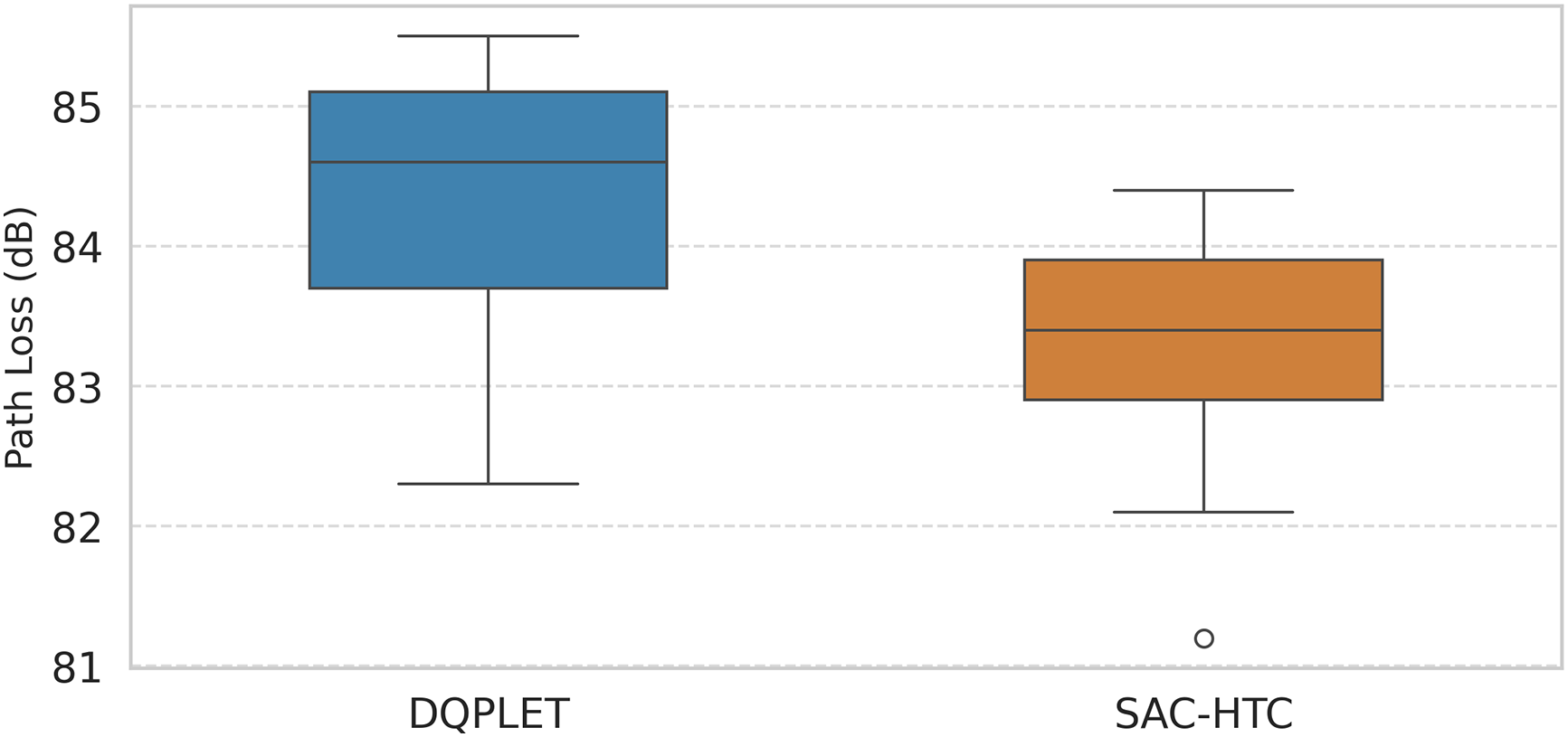
Figure 8: Compare the path loss of SAC-HTC and DQPLET algorithms in case of 200 nodes
Memory usage consists of the model and the replay buffer. The SAC-HTC model employs five neural networks (one Actor, two Critics, and two Value networks), each with three hidden layers of 64 units, totaling approximately 18,000–28,000 parameters, while the replay buffer holds 5000 samples, scaling linearly with the number of nodes N; for
This Fig. 9 illustrates the adaptation process of the DQPLET and SAC-HTC algorithms to the average node degree when the network experiences failures and subsequent recovery. In the initial stage (Episode
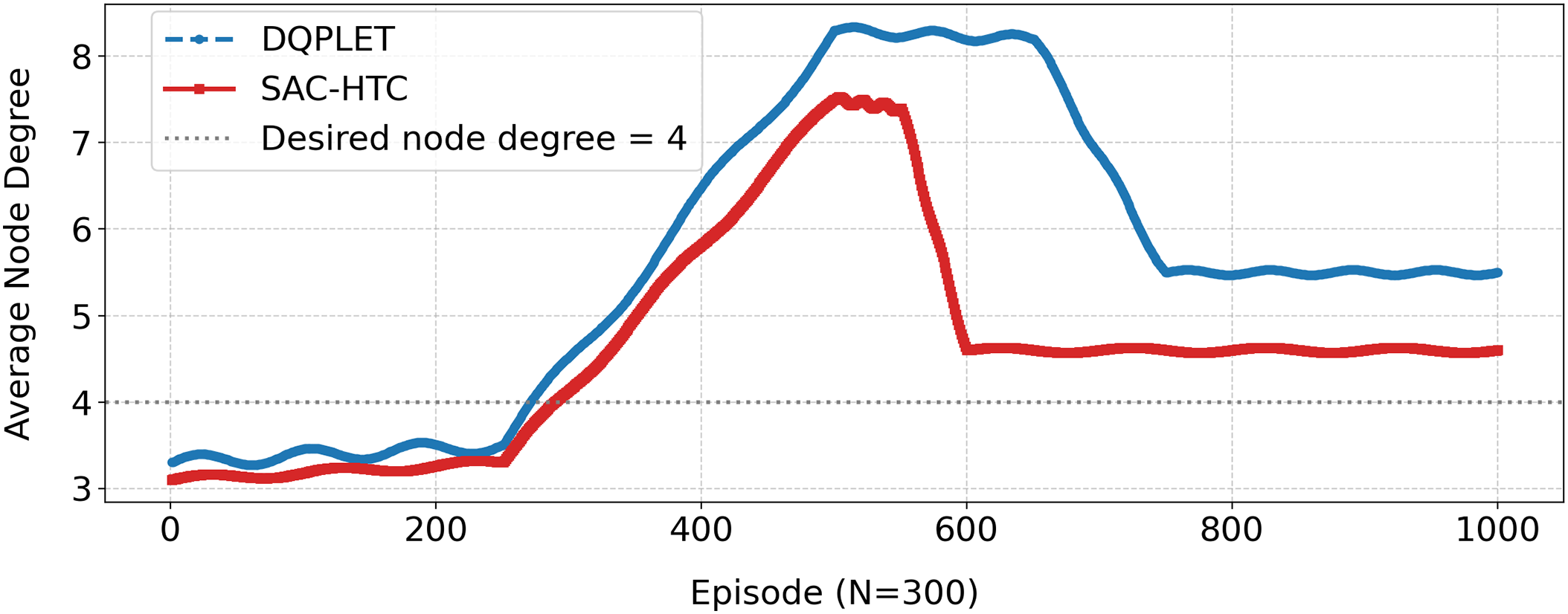
Figure 9: Node degree convergence of DQPLET and SAC-HTC
The dynamic topology control capability of SAC-HTC, managed by an SDN controller, has significant potential for practical applications. In dense urban IoT deployments, such as smart blocks with thousands of sensors for street lighting, parking, traffic monitoring, or pollution tracking, SAC-HTC can minimize interference and save energy by adjusting transmission power to maintain an average node degree
This study introduced and evaluated the SAC-HTC algorithm within the SDWSN framework as an intelligent network topology control mechanism based on DRL, aiming to simultaneously optimize node degree stability, energy efficiency, and communication reliability. Empirical analysis demonstrated that SAC-HTC maintains a stable average node degree around the target value of 4 with minimal deviation, indicating precise control capability and adaptive flexibility. Compared to DQPLET, LTRT, and MaxPower, SAC-HTC achieved significantly superior performance by maintaining a uniform node degree distribution, minimizing outliers, and balancing connectivity with energy efficiency. Regarding energy efficiency, SAC-HTC consistently achieved the lowest EER across all scenarios, averaging around 39% compared to 68% for LTRT and 100% for MaxPower, while the narrow EER range from 29% to 49% reflected stable energy control. Furthermore, the path loss results reinforced SAC-HTC’s effectiveness, with an average value of approximately 81.3 dB, indicating efficient signal transmission. Overall, SAC-HTC achieves an optimal balance between connectivity, energy efficiency, and signal reliability through an entropy-regularized RL mechanism that enables continuous adaptation, fast convergence, and more effective self-organization than static or heuristic-based approaches.
Based on the obtained results, alongside its advantages, this study also highlights opportunities to address scalability limitations of the current centralized model. Future research will focus on developing distributed or multi-agent RL mechanisms to reduce controller load, enabling better adaptation to large-scale networks with hundreds or thousands of nodes. Additionally, the algorithm can be extended to complex hybrid and dynamic network environments, such as integrated SDWSN-UAVNET (Unmanned Aerial Vehicle Network) architectures, smart city infrastructures, and industrial IoT systems with highly mobile nodes. The integration of transfer learning and hybrid optimization models will also be explored to improve training speed and network resilience. Finally, a crucial next step is deploying the algorithm on real hardware platforms to comprehensively validate simulation accuracy. Therefore, SAC-HTC not only establishes a robust foundation for intelligent and energy-efficient network control but also represents a pioneering framework ready for expansion and application in next-generation WSNs.
Acknowledgement: Not applicable.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, Ho Hai Quan; methodology, Ho Hai Quan and Le Huu Binh; software, Ho Hai Quan; validation, Ho Hai Quan and Nguyen Dinh Hoa Cuong; formal analysis, Le Huu Binh and Le Duc Huy; investigation, Ho Hai Quan and Le Huu Binh; resources, Nguyen Dinh Hoa Cuong and Le Duc Huy; data curation, Ho Hai Quan; writing original draft preparation, Ho Hai Quan; writing, review and editing, Le Huu Binh; visualiza-tion, Le Duc Huy; supervision, Le Huu Binh; project administration, Ho Hai Quan. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Hai HTC, Binh LH, Huy LD. A topology control algorithm taking into account energy and quality of transmission for software-defined wireless sensor network. Int J Comput Netw Commun. 2024;16(2):107–16. doi:10.5121/ijcnc.2024.16207. [Google Scholar] [CrossRef]
2. Miyao K, Nakayama H, Ansari N, Kato N. LTRT: an efficient and reliable topology control algorithm for ad-hoc networks. IEEE Trans Wireless Commun. 2009;8(12):6050–8. doi:10.1109/twc.2009.12.090073. [Google Scholar] [CrossRef]
3. Du Z, Wang S, Wang X, Chen J. Formation-aware UAV network self-organization with game-theoretic distributed topology control. IEEE Trans Cogn Commun Netw. 2025;11(5):3470–85. doi:10.1109/tccn.2025.3530443. [Google Scholar] [CrossRef]
4. Zhao H, Chen H, Li S, Zhan L. Joint optimization of UAV trajectory and number of reflecting elements for UAV-carried IRS-assisted data collection in WSNs under hover priority scheme. IEEE Syst J. 2025;19(3):963–74. doi:10.1109/jsyst.2025.3607118. [Google Scholar] [CrossRef]
5. Binh LH, Duong TVT. A novel and effective method for solving the router nodes placement in wireless mesh networks using reinforcement learning. PLoS One. 2024;19(4):e0301073. doi:10.1371/journal.pone.0301073. [Google Scholar] [PubMed] [CrossRef]
6. Binh LH, Duong TVT, Ngo VM. TFACR: a novel topology control algorithm for improving 5G-based MANET performance by flexibly adjusting the coverage radius. IEEE Access. 2023;11:105734–48. doi:10.1109/access.2023.3318880. [Google Scholar] [CrossRef]
7. Qi W, Shen J, Zhang X, Lan T, Diao R, Liu J, et al. Intelligent topology control of distribution power network for increased clean energy absorption using reinforcement learning. In: Proceedings of the 2025 10th Asia Conference on Power and Electrical Engineering (ACPEE); 2025 Apr 15–19; Beijing, China. p. 240–4. doi:10.1109/acpee64358.2025.11040504. [Google Scholar] [CrossRef]
8. Ho HQ, Le HB, Nguyen DHC. Deep Q-learning-based path loss and energy-efficient topology control for wireless sensor networks. Int J Innov Comput Inf Control. 2025;21(6):1503–22. doi:10.3724/sp.j.1001.2009.03414. [Google Scholar] [CrossRef]
9. Ding Z, Shen L, Chen H, Yan F, Ansari N. Energy-efficient topology control mechanism for IoT-oriented software-defined WSNs. IEEE Internet Things J. 2023;10(15):13138–54. doi:10.1109/jiot.2023.3260802. [Google Scholar] [CrossRef]
10. Younus MU, Khan MK, Bhatti AR. Improving the software-defined wireless sensor networks routing performance using reinforcement learning. IEEE Internet Things J. 2022;9(5):3495–508. doi:10.1109/jiot.2021.3102130. [Google Scholar] [CrossRef]
11. Tyagi V, Singh S, Wu H, Gill SS. Load balancing in SDN-enabled WSNs toward 6G IoE: partial cluster migration approach. IEEE Internet Things J. 2024;11(18):29557–68. doi:10.1109/jiot.2024.3402266. [Google Scholar] [CrossRef]
12. Yoo T, Lee S, Yoo K, Kim H. Reinforcement learning based topology control for UAV networks. Sensors. 2023;23(2):921. doi:10.3390/s23020921. [Google Scholar] [PubMed] [CrossRef]
13. Li J, Yi P, Duan T, Wang Y, Zhang Z, Yu J, et al. Centroid-guided target-driven topology control method for UAV ad-hoc networks based on tiny deep reinforcement learning algorithm. IEEE Internet Things J. 2024;11(12):21083–91. doi:10.1109/jiot.2024.3376647. [Google Scholar] [CrossRef]
14. Zhao Z, Liu C, Guang X, Li K. A transmission-reliable topology control framework based on deep reinforcement learning for UWSNs. IEEE Internet Things J. 2023;10(15):13317–32. doi:10.1109/jiot.2023.3262690. [Google Scholar] [CrossRef]
15. Asmat H, Ud Din I, Almogren A, Khan MY. Digital twin with soft actor-critic reinforcement learning for transitioning from industry 4.0 to 5.0. IEEE Access. 2025;13:40577–93. doi:10.1109/access.2025.3546085. [Google Scholar] [CrossRef]
16. Siddiqua A, Liu S, Siddika Nipu A, Harris A, Liu Y. Co-evolving multi-agent transfer reinforcement learning via scenario independent representation. IEEE Access. 2024;12:99439–51. doi:10.1109/access.2024.3430037. [Google Scholar] [CrossRef]
17. Lautenbacher T, Rajaei A, Barbieri D, Viebahn J, Cremer JL. Multi-objective reinforcement learning for power grid topology control. In: Proceedings of the 2025 IEEE Kiel PowerTech; 2025 Jun 29–Jul 3; Kiel, Germany. p. 1–7. doi:10.1109/powertech59965.2025.11180236. [Google Scholar] [CrossRef]
18. Anshad AS, Geetha MN, Rajyalaxmi S, Ganesha M, Kaliappan S, Suganthi D. A blockchain-enabled secure and energy-efficient routing protocol for wireless sensor networks in environmental monitoring using RL-DDPGA. In: Proceedings of the 2025 1st International Conference on Radio Frequency Communication and Networks (RFCoN); 2025 Jun 19–20; Thanjavur, India. p. 1–6. doi:10.1109/rfcon62306.2025.11085190. [Google Scholar] [CrossRef]
19. Yang J, Li W, Li C, Zhang L, Liu L. An energy-efficient and transmission-efficient adaptive routing algorithm using deep reinforcement learning for wireless sensor networks. IEEE Internet Things J. 2025;12(23):50414–26. doi:10.1109/jiot.2025.3609624. [Google Scholar] [CrossRef]
20. Rose B, Nivithaa AN, Parthiban V, Sedhupathi RB, Kannan AT. Intelligent energy-efficient routing in wireless. In: Proceedings of the 2025 3rd International Conference on Artificial Intelligence and Machine Learning Applications; 2025 Apr 29–30; Namakkal, India. p. 1–6. doi:10.1109/aimla63829.2025.11040373. [Google Scholar] [CrossRef]
21. Yadav DK, Nagappan B. Energy communication conservation of methods for 6G and 5G for future performance and training. In: Proceedings of the 2025 1st International Conference on Advances in Computer Science, Electrical, Electronics, and Communication Technologies (CE2CT); 2025 Feb 21–22; Bhimtal, India. p. 503–8. doi:10.1109/ce2ct64011.2025.10939215. [Google Scholar] [CrossRef]
22. Anshad AS, Babavali SF, Cephas I, Ramanan SV, Lakshmi Priya G, Mishra S. An intelligent hybrid quantum-deep reinforcement framework for energy-efficient routing in wireless sensor networks. In: Proceedings of the 2025 6th International Conference for Emerging Technology (INCET); 2025 May 23–25; Belgaum, India. p. 1–6. doi:10.1109/incet64471.2025.11140843. [Google Scholar] [CrossRef]
23. Priyadarshi R, Teja PR, Vishwakarma AK, Ranjan R. Effective node deployment in wireless sensor networks using reinforcement learning. In: Proceedings of the 2025 IEEE 14th International Conference on Communication Systems and Network Technologies (CSNT); 2025 Mar 7–9; Bhopal, India. p. 1113–8. doi:10.1109/csnt64827.2025.10968953. [Google Scholar] [CrossRef]
24. Huang Z, Wang F, Su C, Wang Y, Liu H. Reinforcement learning-driven hunter-prey algorithm applied to 3D underwater sensor network coverage optimization. IEEE Access. 2025;13:78161–81. doi:10.1109/access.2025.3565953. [Google Scholar] [CrossRef]
25. Gurav S, Rangamani TP, Muthusundar SK, Charumathi AC, Nidhya MS, Maram B. Machine learning models for energy consumption sensors in wireless sensor networks. In: Proceedings of the 2025 International Conference on Modern Sustainable Systems (CMSS); 2025 Aug 12–14; Shah Alam, Malaysia. p. 172–7. doi:10.1109/cmss66566.2025.11182560. [Google Scholar] [CrossRef]
26. Alsaeedi M, Mohamad MM, Al-Roubaiey A. SSDWSN: a scalable software-defined wireless sensor networks. IEEE Access. 2024;12:21787–806. doi:10.1109/access.2024.3362353. [Google Scholar] [CrossRef]
27. Sheela V, Rathiga P. Reinforcement learning-based greedy multi-hop routing protocol using for optimizing WSN. In: Proceedings of the 2025 8th International Conference on Computing Methodologies and Communication (ICCMC); 2025 Jul 23–25; Erode, India. p. 6–14. doi:10.1109/iccmc65190.2025.11140740. [Google Scholar] [CrossRef]
28. Packiyalakshmi P, Ramathilagam A. HyRA-WSN: a hybrid reinforcement-attention model for intelligent and energy-efficient resource allocation in wireless sensor networks. In: Proceedings of the 2025 3rd International Conference on Self Sustainable Artificial Intelligence Systems (ICSSAS); 2025 Jun 11–13; Erode, India. p. 635–41. doi:10.1109/icssas66150.2025.11080922. [Google Scholar] [CrossRef]
29. Singh BP, Taneja A. Self-adaptive AI framework for QoS optimisation and energy efficiency in wireless sensor networks. In: Proceedings of the 2025 3rd World Conference on Communication & Computing (WCONF); 2025 Jul 25–27; Raipur, India. p. 1–6. doi:10.1109/wconf64849.2025.11233718. [Google Scholar] [CrossRef]
30. Singh BP, Taneja A. AI-driven QoS management in wireless sensor networks: enhancing energy efficiency and network performance. In: Proceedings of the 2025 3rd World Conference on Communication & Computing (WCONF); 2025 Jul 25–27; Raipur, India. p. 1–7. doi:10.1109/wconf64849.2025.11233612. [Google Scholar] [CrossRef]
31. Chen N, Wen R, Ma S, Wang P. Improved PEGASIS routing protocol for wireless sensor networks. In: Proceedings of the IEEE International Applied Engineering and Artificial Intelligence Conference; 2024 Mar 15–17; Chongqing, China. Vol. 7. p. 534–8. doi:10.1109/iaeac59436.2024.10503997. [Google Scholar] [CrossRef]
32. Sudhir ACH, Pattabhi Ram GS, Srinivas Raghava A, Katuri EP. Efficient topology control and depth adjustment technique for connectivity in UWSN. In: Proceedings of the 2024 4th International Conference on Pervasive Computing and Social Networking (ICPCSN); 2024 May 3–4; Salem, India. p. 592–6. doi:10.1109/icpcsn62568.2024.00099. [Google Scholar] [CrossRef]
33. Aleem A, Thumma R. Hybrid energy-efficient clustering with reinforcement learning for IoT-WSNs using knapsack and K-means. IEEE Sens J. 2025;25(15):30047–59. doi:10.1109/jsen.2025.3582381. [Google Scholar] [CrossRef]
34. Schneider R, da Silva Alves CA, Assis L, de Farias CM, Mendonça I, González PH. A hybrid multi-centrality and reinforcement learning approach for sensor allocation in wireless sensor networks. In: Proceedings of the 2025 28th International Conference on Information Fusion (FUSION); 2025 Jul 7–11; Rio de Janeiro, Brazil. p. 1–7. doi:10.23919/fusion65864.2025.11124024. [Google Scholar] [CrossRef]
35. Wei D, Yang E, He Y. Topology control and optimization of self-organized networks for wireless personal communication. In: Proceedings of the 2023 IEEE 6th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE); 2023 Dec 15–17; Shenyang, China. p. 462–7. doi:10.1109/auteee60196.2023.10407620. [Google Scholar] [CrossRef]
36. Xue Y, Wang Z, Liu L, Fang C, Sun Y, Chen H. UAV-assisted control design with stochastic communication delays. In: Proceedings of the 2022 IEEE 8th International Conference on Computer and Communications (ICCC); 2022 Dec 9–12; Chengdu, China. p. 707–10. doi:10.1109/iccc56324.2022.10065686. [Google Scholar] [CrossRef]
37. Kipongo J, Swart TG, Esenogho E. Artificial intelligence-based intrusion detection and prevention in edge-assisted SDWSN with modified honeycomb structure. IEEE Access. 2023;12:3140–75. doi:10.1109/access.2023.3347778. [Google Scholar] [CrossRef]
38. Udayaprasad PK, Shreyas J, Srinidhi NN, Dilip Kumar SM, Dayananda P, Askar SS, et al. Energy efficient optimized routing technique with distributed SDN-AI to large scale I-IoT networks. IEEE Access. 2023;12:2742–59. doi:10.1109/access.2023.3346679. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools