
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
ARQ–UCB: A Reinforcement-Learning Framework for Reliability-Aware and Efficient Spectrum Access in Vehicular IoT
1 School of Computer Science and Engineering, Yeungnam University, Gyeongsan-si, Republic of Korea
2 Department of Electrical Engineering, Yeungnam University, Gyeongsan-si, Republic of Korea
3 Department of Computer Engineering, COMSATS University Islamabad, Islamabad, Pakistan
4 Department of Computer Engineering, Gachon University, Seongnam-si, Republic of Korea
5 Department of Computer Engineering, College of Computer Sciences and Information Technology, King Faisal University, Al Ahsa, Saudi Arabia
* Corresponding Authors: Mohammad Arif. Email: ; Muhammad Faisal Siddiqui. Email:
# These authors contributed equally to this work
(This article belongs to the Special Issue: Advances in Vehicular Ad-Hoc Networks (VANETs) for Intelligent Transportation Systems)
Computers, Materials & Continua 2026, 87(2), 65 https://doi.org/10.32604/cmc.2026.075819
Received 09 November 2025; Accepted 05 January 2026; Issue published 12 March 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Vehicular Internet of Things (V-IoT) networks need intelligent and adaptive spectrum access methods for ensuring ultra-reliable and low-latency communication (URLLC) in highly dynamic environments. Traditional reinforcement learning (RL)-based algorithms, such as Q-Learning and Double Q-Learning, are often characterized by unstable convergence and inefficient exploration in the presence of stochastic vehicular traffic and interference. This paper proposes Adaptive Reinforcement Q-learning with Upper Confidence Bound (ARQ-UCB), a lightweight and reliability-aware RL framework, which explicitly reduces interruption and blocking probabilities while improving throughput and delay across diverse vehicular traffic conditions. This proposed ARQ-UCB algorithm extends the basic Q-updates with an exploration confidence term able to dynamically balance exploration and exploitation based on uncertainty estimates, hence allowing faster convergence in case of bursty vehicular traffic. A comprehensive simulation framework evaluates throughput, delay, fairness, energy efficiency, and computational complexity in several V-IoT scenarios. Obtained results indicate that ARQ–UCB attains substantial gains in terms of throughput, fairness, and blocking/delay probabilities while retaining sub-20 μs decision latency and complexity per decision, thus validating real-time feasibility for reliable spectrum access in 5G and beyond V-IoT networks.Keywords
Vehicular Internet of Things (V-IoT) networks have emerged as an integral part of intelligent transportation systems (ITS) to realize cooperative perception, real-time coordination, and vehicle-to-everything (V2X) communications to enable safety-critical applications like collision avoidance, platooning, and traffic flow optimization [1–3]. Applications considered above impose ultra-reliable and low latency communication (URLLC) requirements in terms of reliability, latency, and availability, which are quite stringent [4–6].
In highly mobile vehicular environments, fast-changing topologies, fluctuating channel conditions, and heterogeneous QoS demands further complicate the efficient use of the spectrum [7]. It brings up the need to adopt adaptive mechanisms driven by learning that can dynamically achieve a trade-off between reliability and spectral efficiency under uncertainty.
Reinforcement learning (RL) provides a powerful framework for adaptive decision-making in non-stationary environments [8,9]. In the context of wireless communications, RL has been successfully used for dynamic resource allocation, user association, and power control [10,11]. The Q-Learning [12] and Double Q-Learning [13] have shown great adaptability in stationary or slowly varying networks. Traditional RL schemes suffer from several notable limitations when applied to V-IoT environments. Firstly, most tabular RL algorithms rely on uniform or
In view of the above two limitations, this paper proposes a lightweight RL-based spectrum access framework called Adaptive Reinforcement Q-Learning with Upper Confidence Bound (ARQ–UCB). The proposed ARQ-UCB algorithm combines tabular Q-Learning with a UCB-based [16] exploration mechanism that allows the agent to adaptively balance exploration and exploitation according to action uncertainty. Under such a design, the algorithm shall focus the exploration on promising but under-sampled actions while avoiding redundant state revisiting for fast convergence and a favorable reliability-efficiency trade-off in dynamic vehicular environments. We implement the proposed framework in a customized V-IoT simulation environment that models stochastic traffic arrivals, heterogeneous device priorities, and non-stationary spectrum conditions. The performance is assessed in terms of several key performance indicators (KPIs), and a comparative analysis is performed between the proposed solution and the baseline schemes.
The main contributions of this work are summarized as follows:
• We propose ARQ–UCB, a novel reinforcement-learning framework that integrates an upper-confidence bound mechanism with tabular Q-Learning to achieve reliability-aware spectrum access in V-IoT networks.
• We design a comprehensive V-IoT simulation environment that captures stochastic arrivals, multi-class device prioritization, and heterogeneous delay–energy trade-offs.
• We benchmark ARQ–UCB against Q-Learning and Double Q-Learning under diverse vehicular profiles and observe lower delay (0.335 ms vs. 0.387–0.393 ms) and markedly improved URLLC reliability (blocking 0.0081 vs. 0.050–0.051), while maintaining competitive throughput and comparable fairness and energy efficiency across load and class-mix conditions.
• We conduct complexity analysis showing that all schemes preserve
The rest of the manuscript is as follows. The state of the art is discussed in Section 2. The system model and related problem formulation are discussed in Section 3. The proposed solution is discussed in detail in Section 4. The simulation setup and evaluation metrics are defined in Section 5. The results are discussed in Section 6, and finally, the conclusion and future work are presented in Section 7.
In the last few years, RL has received increasing attention for adaptive spectrum access and resource management in both vehicular and IoT systems. The contributions most relevant to this work are discussed here under four themes: classical RL-based spectrum access, deep and multi-agent RL extensions, confidence- and risk-aware learning, and context- and priority-aware vehicular spectrum management. Tabular RL approaches have been widely explored for modeling dynamic spectrum selection under uncertainty. In [17], a multi-agent Q-Learning framework allowed vehicular users to cooperatively reuse V2I spectrum, improving throughput under interference constraints. Van Hasselt’s Double Q-Learning [13] mitigated overestimation bias in Q-values and achieved more stable convergence compared to single-table Q-Learning [12]. However, they both suffer from slow adaptation in high-mobility vehicular environments where the state transitions change rapidly due to Doppler effects and bursty arrivals. Moreover, these tabular baselines typically rely on fixed exploration (e.g.,
The scalability issues of tabular methods have motivated DRL approaches that approximate value functions by neural networks. Ye and Li [18] applied deep RL for resource allocation in V2V links, enabling dynamic spectrum sharing. Yang et al. [11] extended this idea via an actor–critic model for URLLC-guaranteed V2V communication, while Luong et al. [10] provided a comprehensive survey of DRL applications across wireless systems. Federated RL has also been proposed to enhance privacy and scalability in vehicular settings [19]. Deep RL has also been actively explored for vehicular resource allocation, with multi-agent DQN frameworks, graph-matching strategies, and actor–critic schedulers demonstrating improved adaptability under highly dynamic V2X conditions [20,21]. Other studies have applied DRL for joint power and RB allocation, task offloading, and vehicular edge intelligence [22,23]. More recent advances include federated DRL for cooperative vehicular caching and edge-assisted decision making [24], as well as emerging multi-agent RL models for task allocation and coordination in the Internet of Vehicles [25]. These works illustrate the growing relevance of DRL-enabled decision-making in vehicular networks; however, their inference latency and computational cost make them less suitable for the sub-millisecond spectrum-access decisions required in V-IoT systems. A further limitation is that many DRL-based schedulers assume richer compute and longer decision budgets than tens-of-microseconds RSU scheduling, making their practicality under URLLC timing constraints unclear.
UCB-based strategies [16,26] strike a balance in a principled way, guiding exploration towards higher uncertainty actions, which provably leads to efficient learning in finite time. Such methods have been adopted for channel selection and traffic offloading within wireless networks but remain underexplored in vehicular RL systems, where state non-stationarity presents unique challenges. Recent works have focused on QoS differentiation and contextual adaptation in vehicular networks. Iqbal et al. [15] presented a Priority-Aware Spectrum Management (PASM) framework, wherein emergency and non-critical vehicular classes were differentiated by continuous-time Markov chains (CTMCs). An extended work [14] proposed an adaptive CTMC-based wireless communication model that achieved better delay–reliability trade-offs. While these works proved the effectiveness of RL-based spectrum management in V-IoT, most of the existing methods still depend on fixed exploration parameters that restrict scalability under non-stationary traffic and channels. Unlike prior works that rely on static
We consider a single RSU that provides spectrum access to a set of
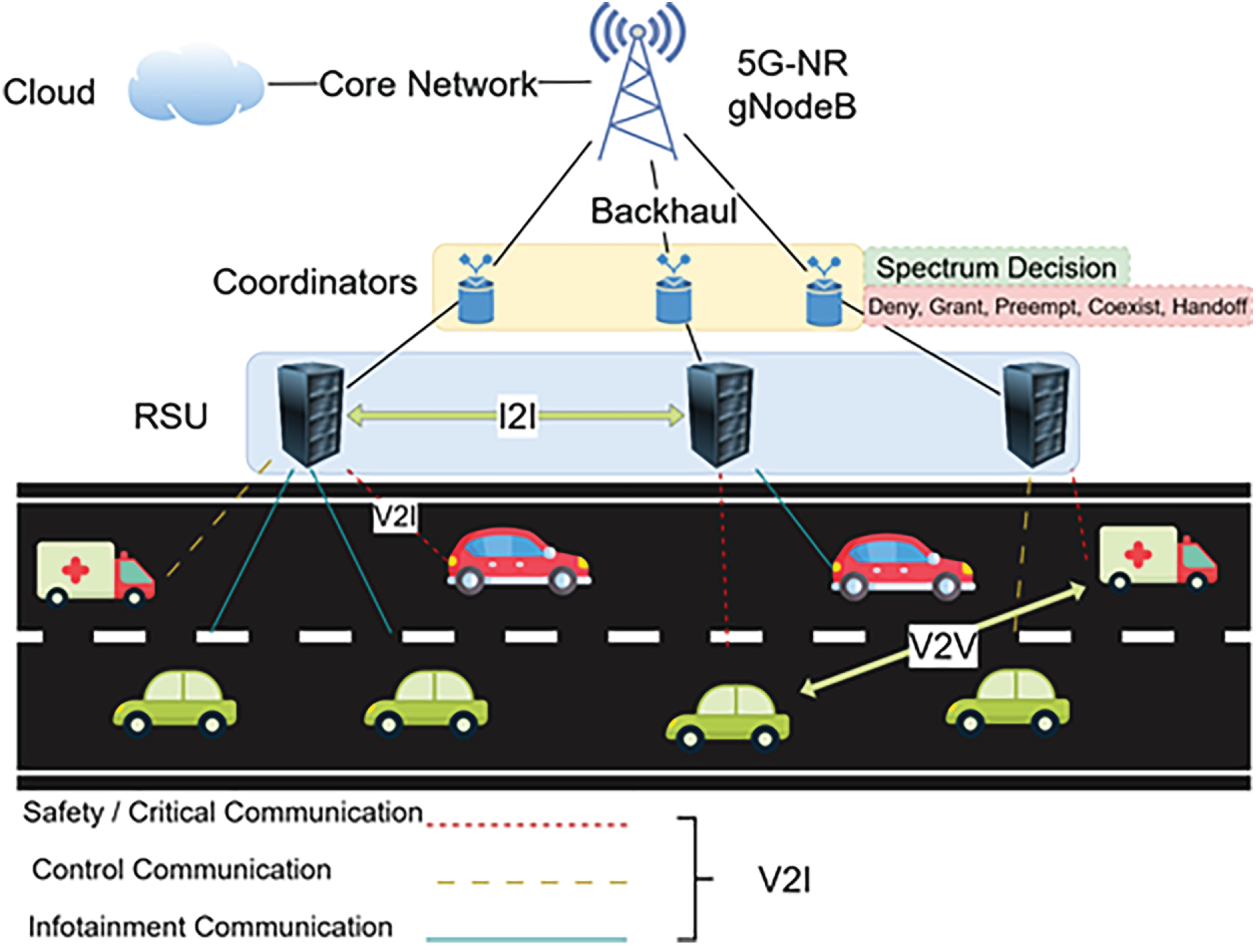
Figure 1: System model of the considered V-IoT network with an RSU managing multi-class traffic.
Each V-IoT device belongs to one of three traffic classes: emergency, mission-critical, and non-critical. Packet arrivals for class
In the implemented simulator, each scheduled device transmits a random payload determined by the physical-layer function
where M is the number of available RBs. A sufficient stability condition consistent with the simulator is shown in Eq. (2) together with per-class feasibility
This ensures that the aggregate arrival rate of bits per second does not exceed the effective aggregate service capacity induced by the learned scheduling policy.
Here,
Spectrum allocation is modeled as a discrete-time Markov decision process (MDP) defined by state space
where
where
where
This objective unifies throughput maximization, latency minimization, and energy-efficiency improvement under the stability constraint which is shown in Eq. (2), enabling the RL agent to learn adaptive scheduling policies that satisfy heterogeneous QoS demands across multi-class V-IoT devices.
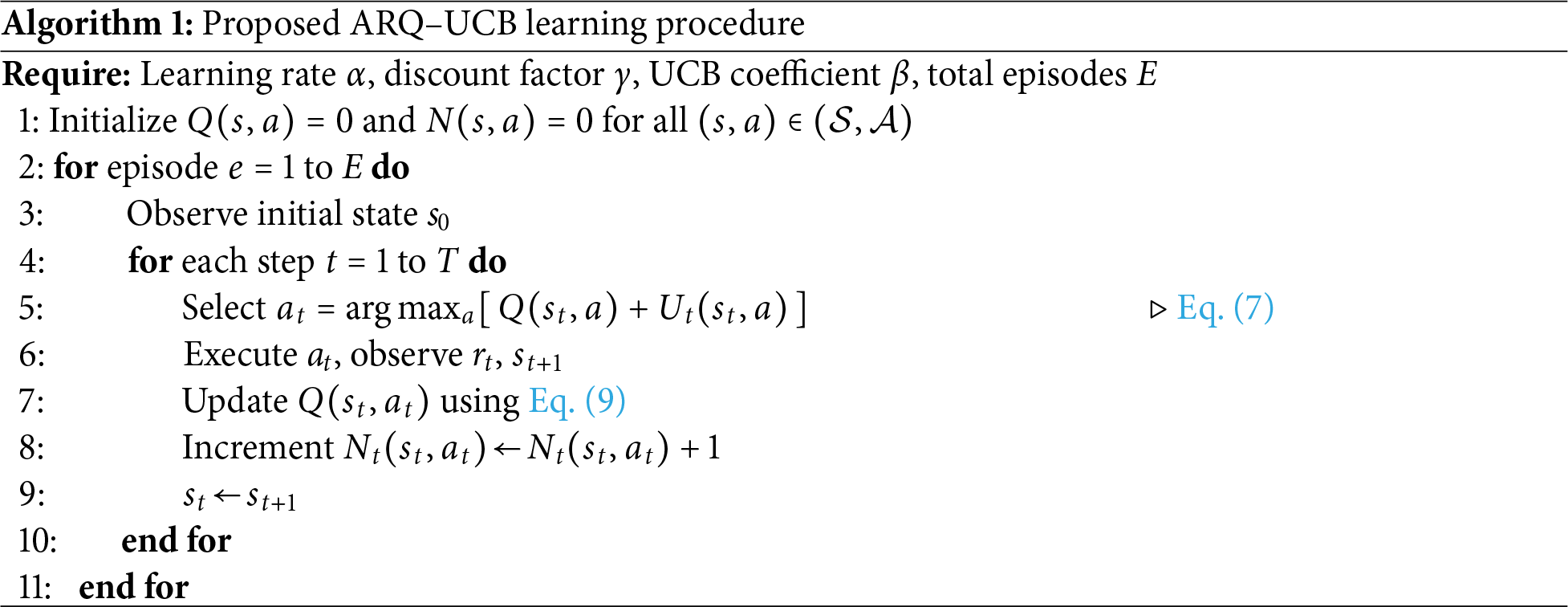
This section introduces the ARQ–UCB framework and the goal is to achieve reliable, low-latency spectrum access in highly dynamic V-IoT environments while keeping constant-time computational complexity. Classical Q-Learning and Double Q-Learning rely on fixed
where
The confidence term
where
where
where T is the total number of decision steps. This sublinear regret bound implies that the time-averaged performance converges asymptotically to the optimal policy
ARQ–UCB retains the same constant-time per-decision complexity
The choice of tabular Q-Learning and Double Q-Learning as baselines aligned with the real-time constraints of V-IoT systems. These methods offer deterministic and constant-time decision steps, which are essential in sub-msec vehicular scheduling environments. Deep or hybrid RL approaches typically require neural inference at every decision step, increasing computational cost and introducing latency that conflicts with the time budgets of URLLC-oriented vehicular communication. Evaluating ARQ–UCB against lightweight tabular baselines provides a fair and meaningful comparison within the class of algorithms suitable for on-board or RSU-level deployment. For completeness, the update rules and implementation details of these baseline schemes are summarized in Appendix A. It is worth noting that the structure of ARQ–UCB is model-agnostic: the UCB-driven exploration mechanism can be integrated with deep RL architectures if computational resources permit. This extension would enables the confidence-based exploration scheme to work on richer state representations, focusing on infrastructure-assisted vehicular intelligence.
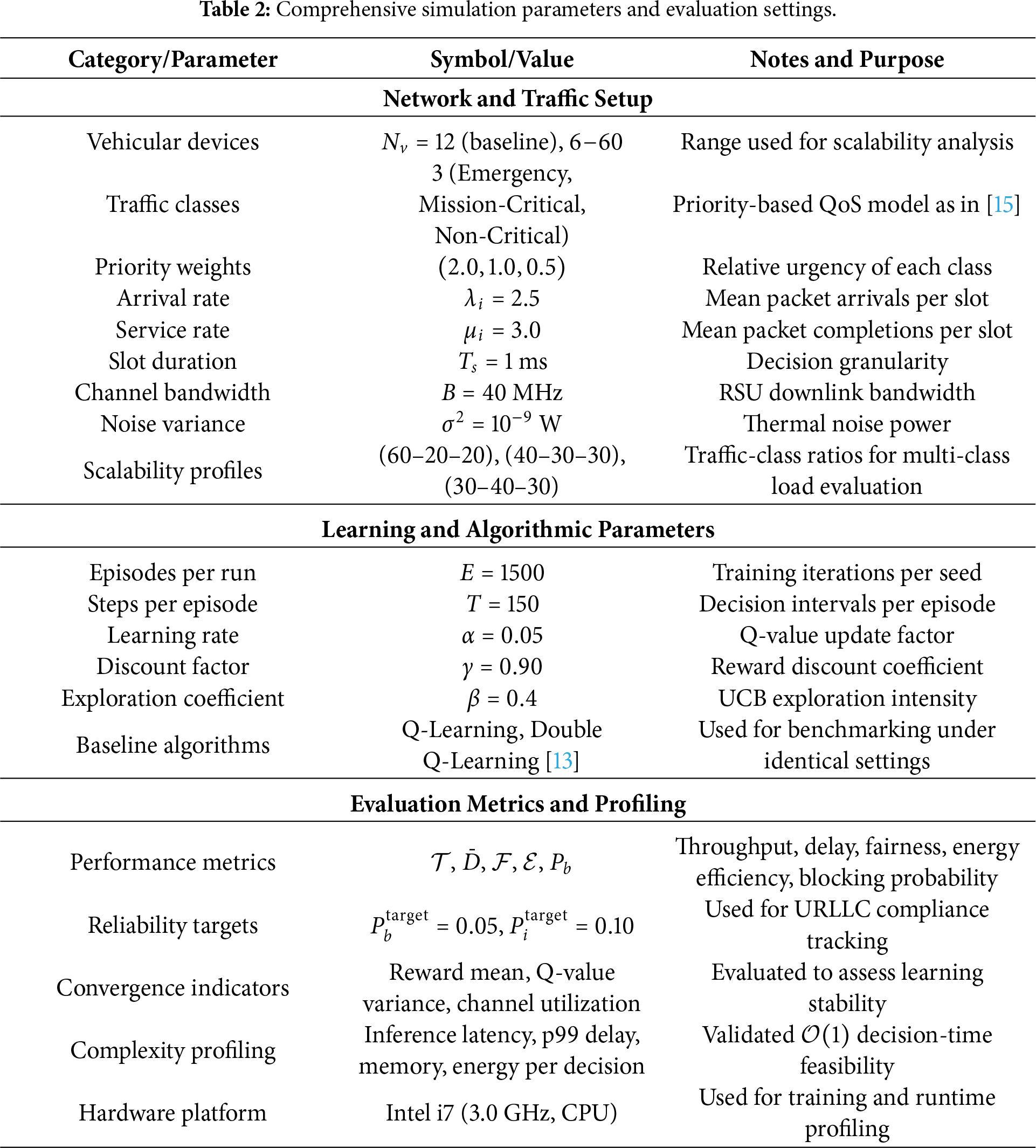
A large-scale simulation framework in Python 3.13 was developed for the proposed ARQ–UCB algorithm under realistic conditions of V-IoT. The environment models a single RSU dynamically allocating spectrum resources among heterogeneous vehicular devices with mobility, traffic burstiness, and non-stationary channels. All experiments were carried out in a CPU platform, with results averaged over five random seeds, which ensures statistical reliability with 95% confidence intervals.
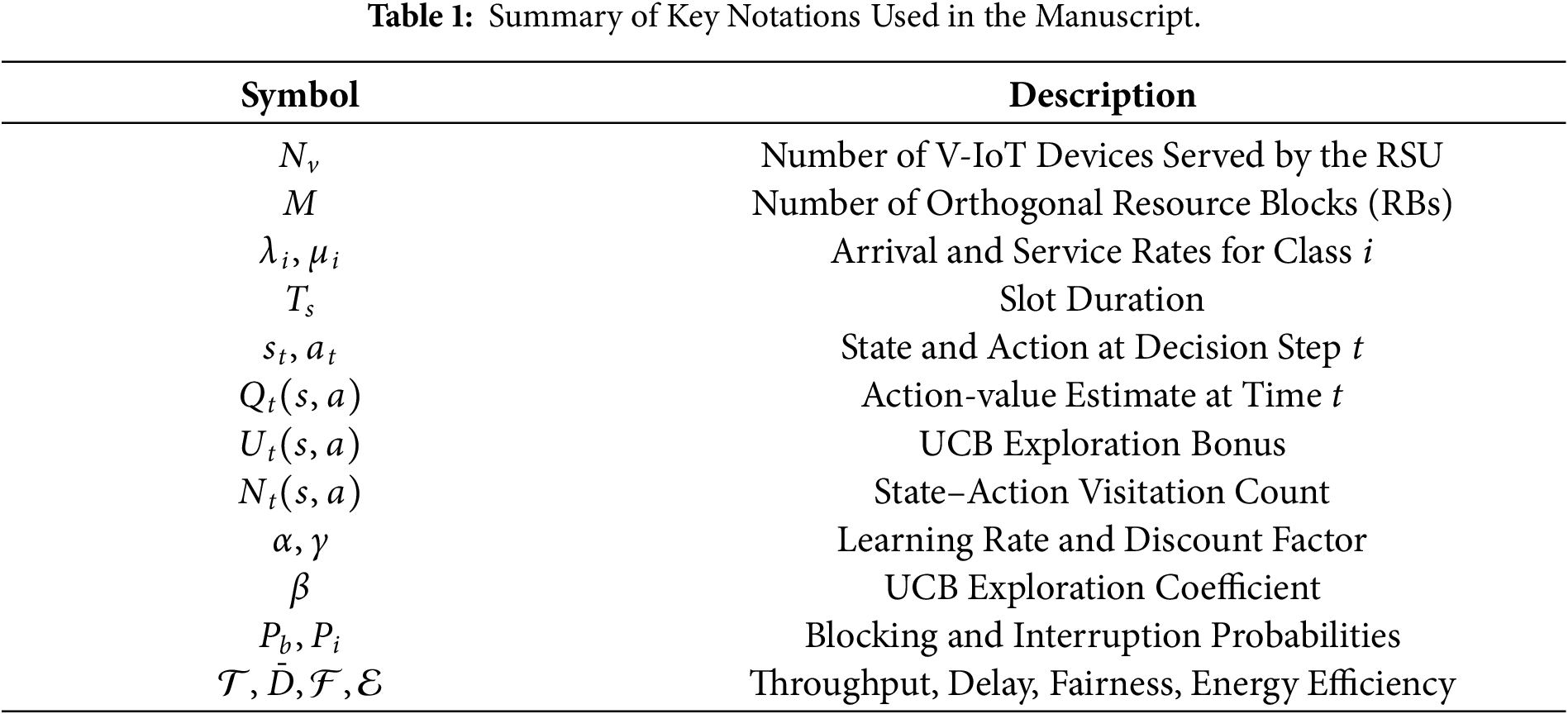
All the metrics are evaluated under identical conditions of simulation. The complete configurations of system parameters, learning settings, and scalability ranges are given in Table 2. These parameters are selected to reflect timing and load conditions typical of RSU-assisted V-IoT scheduling. The 1 ms slot duration matches short-horizon URLLC-oriented scheduling granularity, while the three-class priority weights follow the relative urgency model used in prior V-IoT spectrum management studies. The learning parameters
The simulation environment reflects realistic V-IoT operating conditions through the modeling of fast-timescale MAC-layer dynamics that directly influence spectrum-access decisions. The traffic behavior is generated through a skewed-Poisson arrival process, which emulates the burstiness and temporal variations that are characteristic of vehicular communication loads. This environment also considers other important cross-layer factors such as time-varying SINR, heterogeneous device classes, queue aging, and non-stationary channel conditions. All these features imitate the reliability-critical behavior of V2X systems at the sub-millisecond level, allowing for a regulated and transparent evaluation of blocking probability, interruption probability, and other URLLC-focused performance indicators under diverse load and traffic-mix scenarios.
The proposed ARQ–UCB framework is considered against classical Q-Learning and Double Q-Learning under exact V-IoT settings. In the discussion that follows, the results are presented in terms of throughput, delay, fairness, energy efficiency, training performance, convergence speed, blocking and interruption probability, and overall computational complexity.
The throughput denotes the total data rate successfully delivered by all devices, averaged over the scheduling horizon. It is computed as in Eq. (11).
where
As shown in Fig. 2, the mean throughput, its cumulative distribution, and the scalability trend with varying numbers of devices and traffic-class mixes are shown. ARQ–UCB achieves consistently higher mean throughput across all evaluated traffic configurations compared with the baseline methods. Specifically, Fig. 2a illustrates that ARQ–UCB achieves the maximum average throughput of 28.43 Mbps, whereas Double Q-Learning reaches an average of 28.32 Mbps and Q-Learning 28.30 Mbps. Although the relative improvement appears modest, around 0.4%, it is fully reproducible across all runs, indicating that the upper-confidence exploration mechanism supports more effective spectrum utilization under non-stationary conditions.
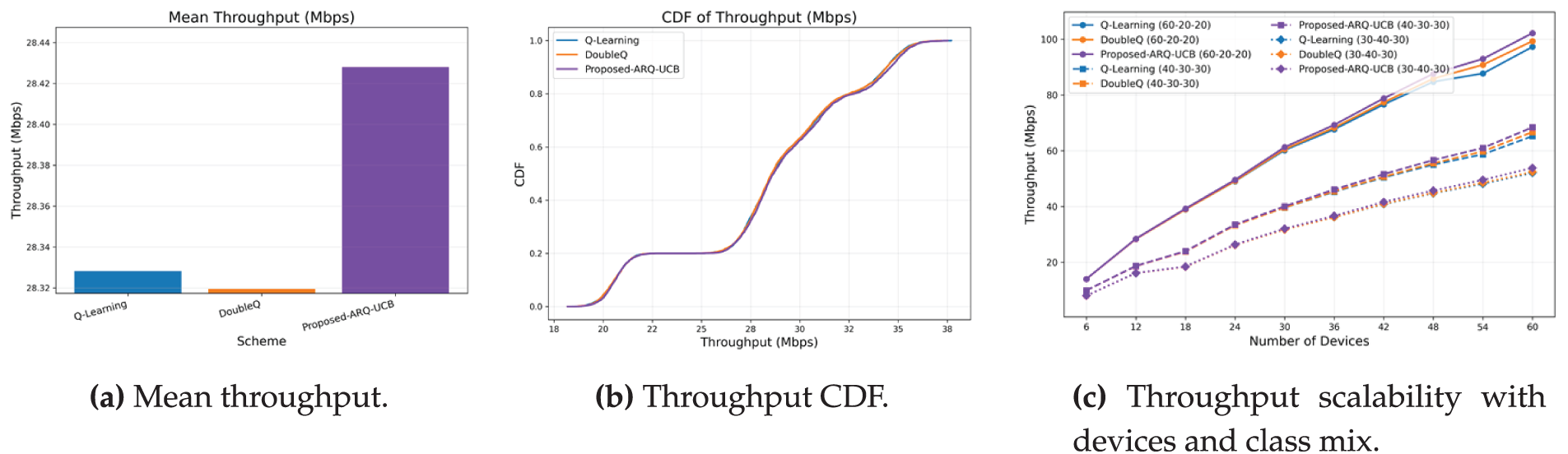
Figure 2: Throughput performance of ARQ–UCB and baseline schemes.
The cumulative distribution in Fig. 2b provides a right-shift and a tighter concentration near the upper quantile, indicating that ARQ–UCB delivers fewer low-rate episodes and improved throughput stability. The gain observed is quite stable, as the standard deviation across runs is below 0.15 Mbps. Fig. 2c shows that, for all methods, throughput scales almost linearly with the number of active devices, which is indicative of efficient spectrum reuse. For the 60–20–20 class mix, ARQ–UCB attains approximately 102 Mbps for 60 devices, whereas Double Q-Learning and Q-Learning attain 100 and 99 Mbps, respectively. Under the more balanced mixes of 40–30–30 and 30–40–30, ARQ–UCB maintains a consistent 4%–6% advantage, which underlines its adaptability under various traffic conditions.
Although the relative gain in mean throughput seems reasonable, its statistical bearing is guaranteed by the five-seed evaluation with 95% confidence intervals. In fact, all the vehicular density scenarios show that the confidence bands of ARQ–UCB do not overlap with the ones of the baselines, highlighting a significant gain in spectral efficiency even if the absolute difference in Mbps was small. In the context of V-IoT communications, throughput gains of even 0.3–0.5 Mbps per device correspond to meaningfully higher slot utilization, reduced idle RB occurrences, and smoother scheduling under bursty arrivals. Paired t-tests performed across seed averages confirmed that ARQ–UCB achieves statistically significant throughput improvements over both Q-Learning and Double Q-Learning (p < 0.05), validating that the observed gains are consistent and practically beneficial.
The average delay in this work is the mean waiting time experienced by packets before successful transmission. It is derived using Little’s law as shown in Eq. (12).
where
As can be noticed from Fig. 3, the delay results are subcategorized by mean delay, cumulative distribution, and scalability performance. ARQ–UCB provides the lowest mean delay of 0.335 ms with a reduction of about 14%–15% compared to 0.393 ms achieved by Q-Learning and 0.387 ms achieved by Double Q-Learning. This is because ARQ–UCB stabilizes queue occupancy and gives more importance to devices that experience higher scheduling uncertainty, which altogether cuts their waiting time. The cumulative distribution function shown in Fig. 3b shifts left, which means more than 95% of packets meet the latency of 0.4 ms. Fig. 3c further shows scalability whereby 60 devices yield a mean delay of 5.8 ms in ARQ–UCB, whereas for Double Q-Learning and Q-Learning, the mean delays are 6.4 and 6.7 ms, respectively. This ensures that even in highly loaded vehicular contexts, ARQ–UCB maintains low-latency performance.
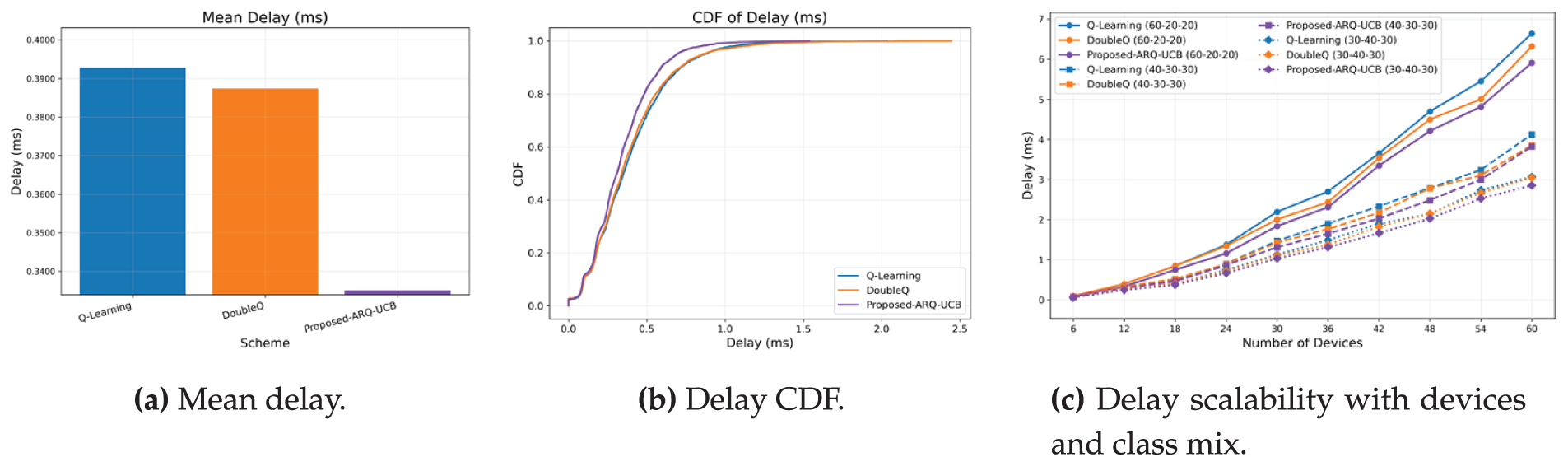
Figure 3: Delay evaluation of ARQ–UCB and baseline algorithms.
To further substantiate the delay reduction achieved by ARQ–UCB, we evaluated all methods over five independent seeds and report 95% confidence intervals. The reduction of approximately 14%–15% in mean delay is statistically significant, with paired t-tests yielding
Fairness quantifies the equality of resource distribution across devices and is measured using Jain’s index as shown in Eq. (13).
where
As shown in Fig. 4, it presents fairness results in mean, CDF, and scalability plots. Fig. 4a indicates that ARQ–UCB achieves a mean index of 0.36419, slightly higher than 0.36413 and 0.36412 for Q-Learning and Double Q-Learning, respectively. While the numerical difference is small, the narrower CDF in Fig. 4b demonstrates that ARQ–UCB ensures more consistent per-device allocations. Fig. 4c confirms stable fairness even as the number of devices increases. The results indicate that ARQ–UCB maintains priority awareness without starving lower-class devices, striking a balance between QoS differentiation and equitable access.
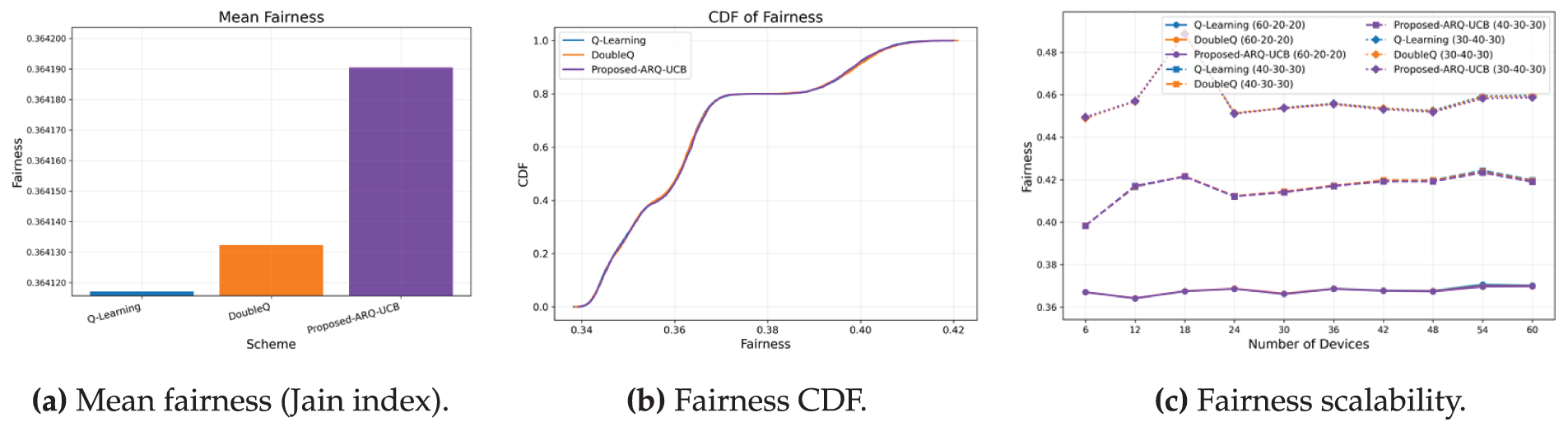
Figure 4: Fairness performance of ARQ–UCB and the baselines.
6.4 Energy Efficiency and Training Performance
Energy efficiency in this work is represents as the number of useful bits transmitted per unit of consumed power as shown in the Eq. (14).
Fig. 5 presents the distribution of energy efficiency, its sample mean, and the scalability of training time. The mean comparison in Fig. 5a indicates that ARQ–UCB attains a value comparable to the baselines, with a small shortfall relative to Q-Learning and Double Q-Learning that remains within about one percent. The cumulative distribution in Fig. 5b shows why this occurs. ARQ–UCB places less probability mass in the low-efficiency tail near
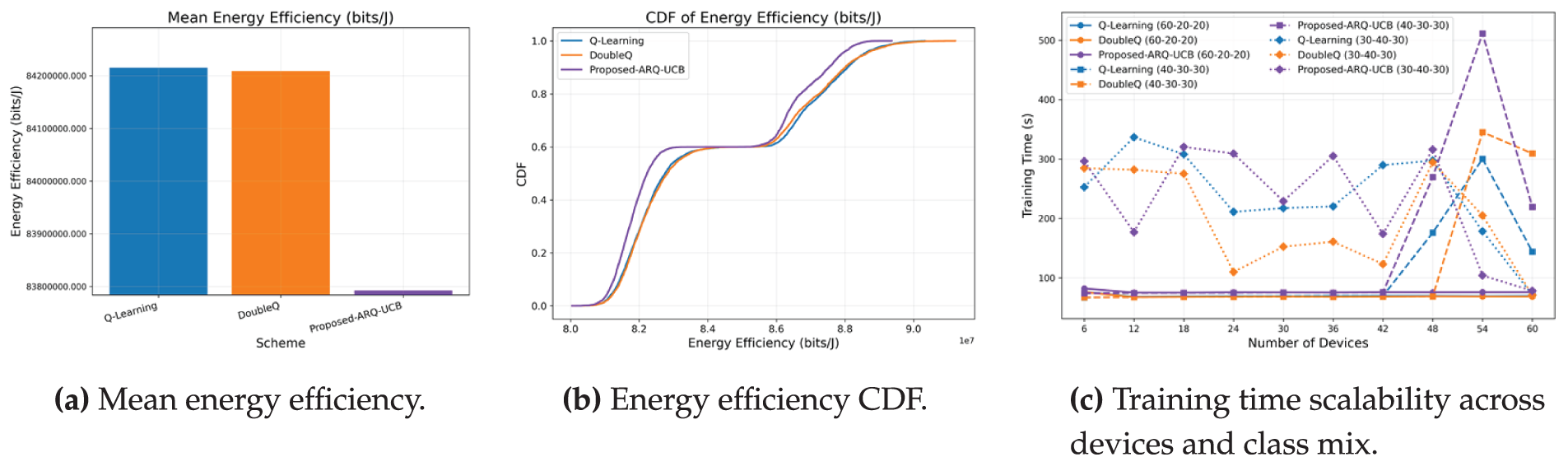
Figure 5: Energy efficiency and training time. ARQ–UCB concentrates probability mass in higher efficiency regions and keeps training time within a narrow band as the network scales.
The training-time comparison in Fig. 5c shows that the proposed ARQ–UCB exhibits traffic-dependent variation in convergence behavior. In particular, the balanced 30–40–30 class mix displays noticeably larger fluctuations. This occurs because symmetric traffic levels generate comparable queue pressures across classes, prolonging the period in which the UCB exploration term remains active and delaying early stabilization. In dense high-load scenarios such as the 40–30–30 profile, the exploration overhead can lead to episodes where ARQ–UCB requires substantially longer training time, consistent with the peak values observed in the figure. This behavior does not indicate degradation in steady-state performance; rather, it reflects the additional iterations required for confidence-driven exploration when multiple class backlogs evolve at similar rates. Across all mixes, the general scaling trend remains consistent with expectations for uncertainty-guided tabular learning in multi-class vehicular IoT environments.
6.5 Convergence Speed and Reliability
The convergence behavior in Fig. 6 highlights the learning stability of the proposed ARQ–UCB. The reward evolution in Fig. 6a shows a rapid rise during the first 50 episodes and stabilization near 6.3 by episode 150, while Q-Learning and Double Q-Learning require 600 and 400 episodes, respectively, to reach comparable levels. The Q-value trajectories in Fig. 6b display smooth convergence with reduced oscillations, indicating improved value consistency.
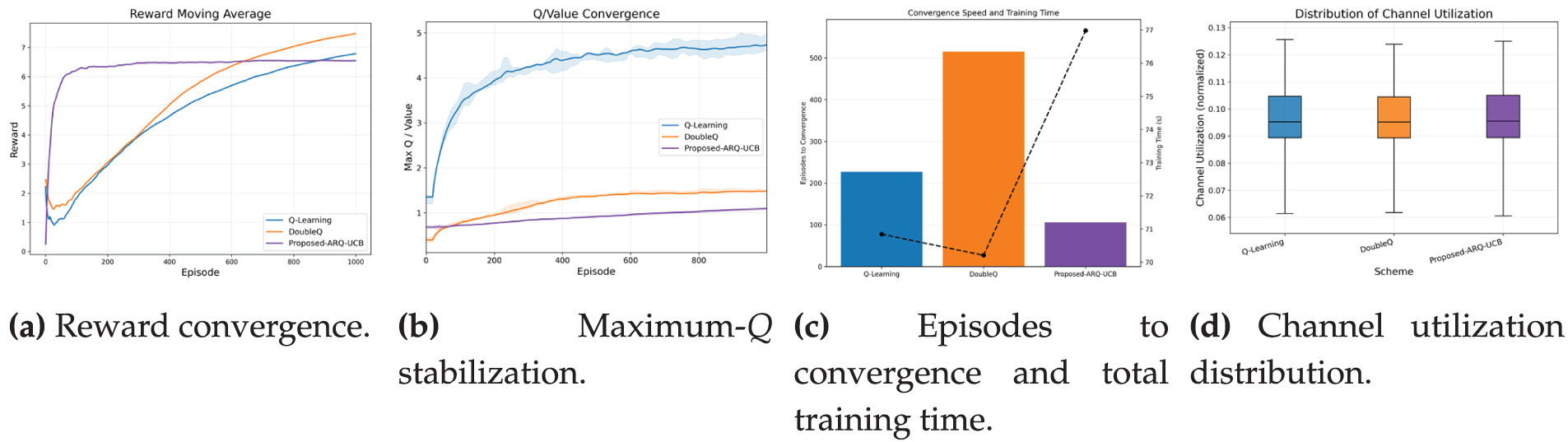
Figure 6: Convergence speed and practicality. ARQ–UCB learns faster, stabilizes value estimates smoothly, and maintains efficient channel use.
Fig. 6c summarizes the episodes and wall-clock time required for convergence. ARQ–UCB reaches the threshold with fewer episodes, and its training time remains competitive despite the added UCB exploration. In balanced traffic mixes, convergence may take longer because similar class loads keep the exploration term active for an extended period. Fig. 6d shows the distribution of normalized channel utilization, where all schemes maintain a stable and narrow range. ARQ–UCB displays slightly lower variability, indicating smoother scheduling behavior.
6.6 Blocking and Interruption Probability
The blocking probability denotes the ratio of denied attempts, which is quantifies in this work using Eq. (15). In the simulator, each queue has a finite capacity and a maximum tolerated waiting time; packets that arrive when the buffer is full or whose delay budget is exceeded are dropped and counted as blocked, an effect that naturally appears more frequently in lower-priority classes under heavy load.
The Blocking and Interruption probability results are presented in Fig. 7. Fig. 7a illustrates that ARQ–UCB cuts blocking down to 0.0081, compared with 0.050–0.051 for the baseline schemes. The improvement, which is approximately 6.3 times, confirms the improved channel access management of the proposed solution. The standard deviation also shrinks from
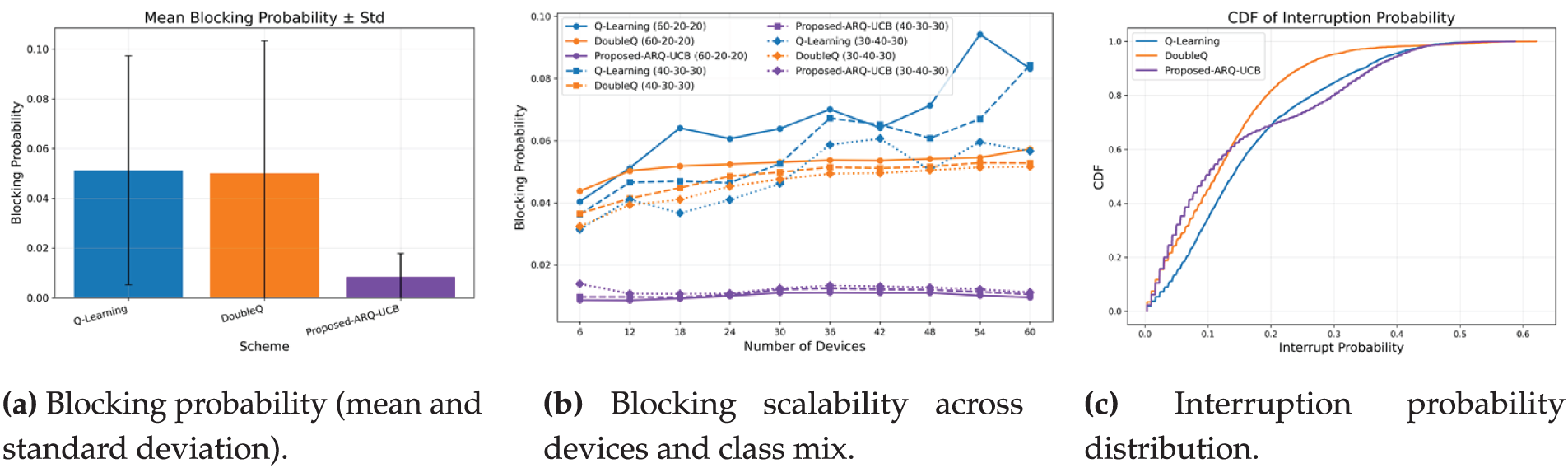
Figure 7: Blocking and interruption behavior with scaling. ARQ–UCB reduces access denials, stabilizes interruption probability, and preserves robustness as the network grows.
6.7 Sensitivity Analysis of Key Hyperparameters
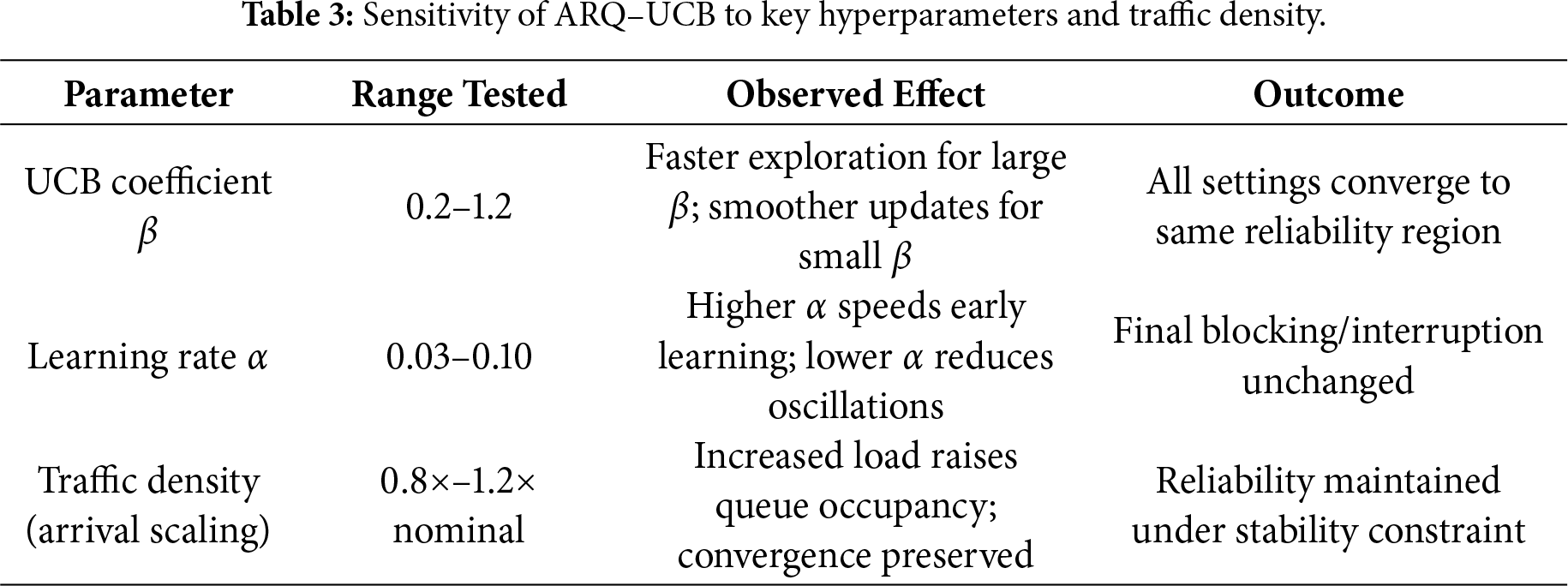
To extend the results of Figs. 2–7, we performed a sensitivity study to assess how robust ARQ–UCB is to its main hyperparameters and traffic density variations. We list the tested ranges and associated observed effects in Table 2.
The UCB exploration coefficient
These results are compatible with the class-mix scenarios already shown in Figs. 2–7. As load increases, ARQ–UCB maintains low blocking probability and stable interruption levels, provided that the overall stability condition defined in Section 3 is satisfied. From Table 3, the trends indicate that ARQ–UCB retains strong learning dynamics under various hyperparameter settings and load conditions, further confirming its applicability in variable and unpredictable vehicular environments.
6.8 Reliability Tracking against Targets
Reliability in V-IoT scheduling is characterized by the system’s ability to maintain the blocking probability
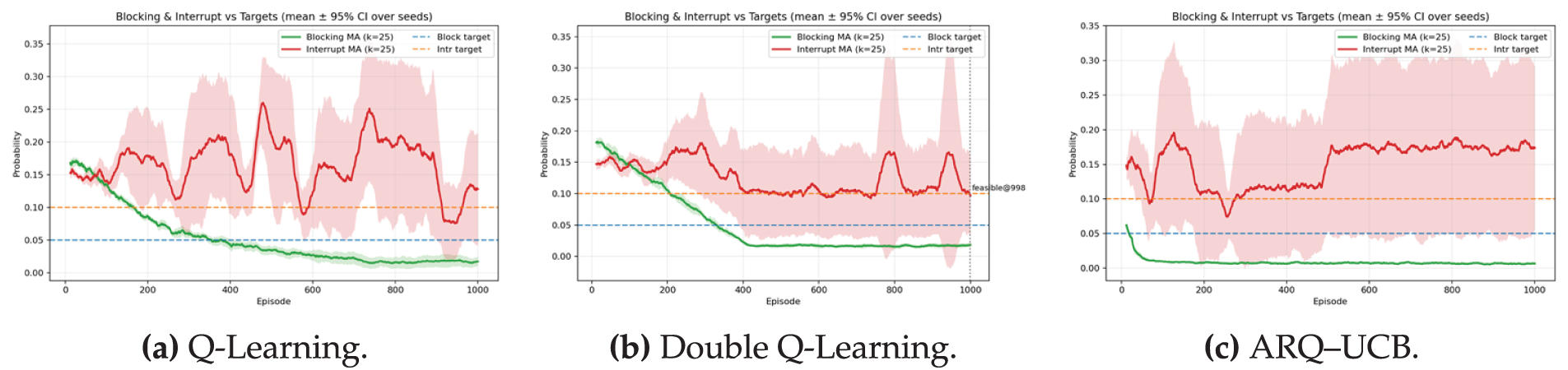
Figure 8: Reliability tracking against targets with moving average window
In Fig. 8a, the Q-Learning baseline exhibits a steady decline in blocking probability from approximately 0.16 at the start of training to below the target limit of 0.05 around episode 380. After this point, the blocking rate remains compliant, though nominal fluctuations are visible toward later episodes. The probability of interruption, however, varies widely between 0.12 and 0.20 across training, while the confidence band also is quite wide. These fluctuations indicate that while Q-Learning eventually meets the blocking target, it fails to show stability in holding consistent interruption reliability, thus restricting its full suitability for stringent URLLC requirements.
The blocking probability of the Double Q-Learning trajectory in Fig. 8b is more stable and converges to around 0.045 after episode 400, while the interruption probability remains volatile with periodic surges above 0.25. It indicates that even though Double Q-Learning reduces value overestimation, it cannot maintain target reliability levels consistently.
Fig. 8c shows the behavior of the proposed ARQ–UCB algorithm. The blocking probability drops rapidly, crossing the target limit within the first 150 episodes and stabilizing close to 0.02 with a narrow confidence interval. The interruption probability converges close to the threshold 0.10, still showing small oscillations without significant overshoot. This behavior confirms that ARQ–UCB achieves early and stable compliance with the defined reliability constraints. Tighter confidence regions across both metrics indicate the robustness of UCB-guided exploration, effectively balancing aggressive learning and cautious adaptation during convergence.
All algorithms exhibit constant-time per-decision complexity,
This paper proposes a lightweight RL framework for reliable and efficient spectrum access in V-IoT networks, named ARQ–UCB. The proposed method enhances classical tabular Q-Learning with a UCB exploration mechanism that adapts the intensity of exploration according to action-specific uncertainty. ARQ–UCB embeds confidence-aware terms into the Q-value update rule for preventing excessive exploration and promoting faster convergence in highly dynamic V-IoT environments characterized by bursty traffic and rapidly varying channel conditions. Extensive simulations carried out for realistic vehicular traffic profiles showed that ARQ–UCB outperforms baseline schemes consistently.
The proposed framework demonstrates up to 15% lower mean latency and about 6
The proposed framework also has limitations. First, the evaluation is simulation-based and relies on synthetic traffic and channel realizations, which may not capture all mobility-induced effects observed in standardized V2X traces. Second, the tabular state representation is intentionally lightweight, but it can limit scalability when the state space grows due to richer context or larger deployments. These limitations can be addressed by validating ARQ–UCB on standardized mobility traces and by extending the current design with compact function approximation or representation learning while retaining strict decision-latency constraints.
Future research will extend ARQ–UCB along several directions. First, a multi-agent ARQ–UCB variant will be developed to support cooperative learning among distributed RSUs in large-scale V2X deployments. Second, the integration of reconfigurable intelligent surfaces and edge-federated learning will enable distributed spectrum coordination while preserving data privacy. Third, grounding the evaluation in standardized V2X mobility traces and real-world datasets will allow broader assessment of realism and complement the current synthetic analysis. Fourth, we will incorporate compact deep reinforcement learning baselines to provide broader performance context and to assess trade-offs beyond the lightweight tabular methods. Future research will also include a broader sensitivity analysis by varying traffic-model parameters such as arrival burstiness, class-mix ratios, and load asymmetry to more comprehensively evaluate ARQ–UCB’s adaptability. Finally, coupling ARQ–UCB with emerging network slicing and semantic communication paradigms in 6G will further improve spectral efficiency, reliability, and energy sustainability within ultra-dense V-IoT environments.
Acknowledgement: The authors thank the Yeungnam University WINLab for computing support.
Funding Statement: This work was supported by the Deanship of Scientific Research, Vice Presidency for the Graduate Studies and Scientific Research, King Faisal University, Saudi Arabia [Grant No. KFU260072].
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, Adeel Iqbal, Tahir Khurshaid; methodology, Tahir Khurshaid, Mohammad Arif; software, Syed Abdul Mannan; validation, Tahir Khurshaid, Muhammad Faisal Siddiqui; formal analysis, Adeel Iqbal, Syed Abdul Mannan Kirmani; investigation, Adeel Iqbal, Syed Abdul Mannan Kirmani; resources, Mohammad Arif; data curation, Muhammad Faisal Siddiqui; writing—original draft preparation, Adeel Iqbal, Tahir Khurshaid, Muhammad Faisal Siddiqui; writing—review and editing, Syed Abdul Mannan Kirmani, Mohammad Arif; visualization, Muhammad Faisal Siddiqui; supervision, Adeel Iqbal; project administration, Mohammad Arif; funding acquisition, Muhammad Faisal Siddiqui. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the corresponding authors upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: Adeel Iqbal is a Guest Editor of a special issue in CMC.
Appendix A Baseline Reinforcement Learning Schemes
This appendix summarizes the two tabular baselines used for comparison with ARQ–UCB: Q-Learning and Double Q-Learning. Both are model-free value-based methods that update action values from bootstrapped targets. Implementation parameters follow Section 5 and are not repeated here.
Appendix A.1 Standard Q-Learning (Tabular)
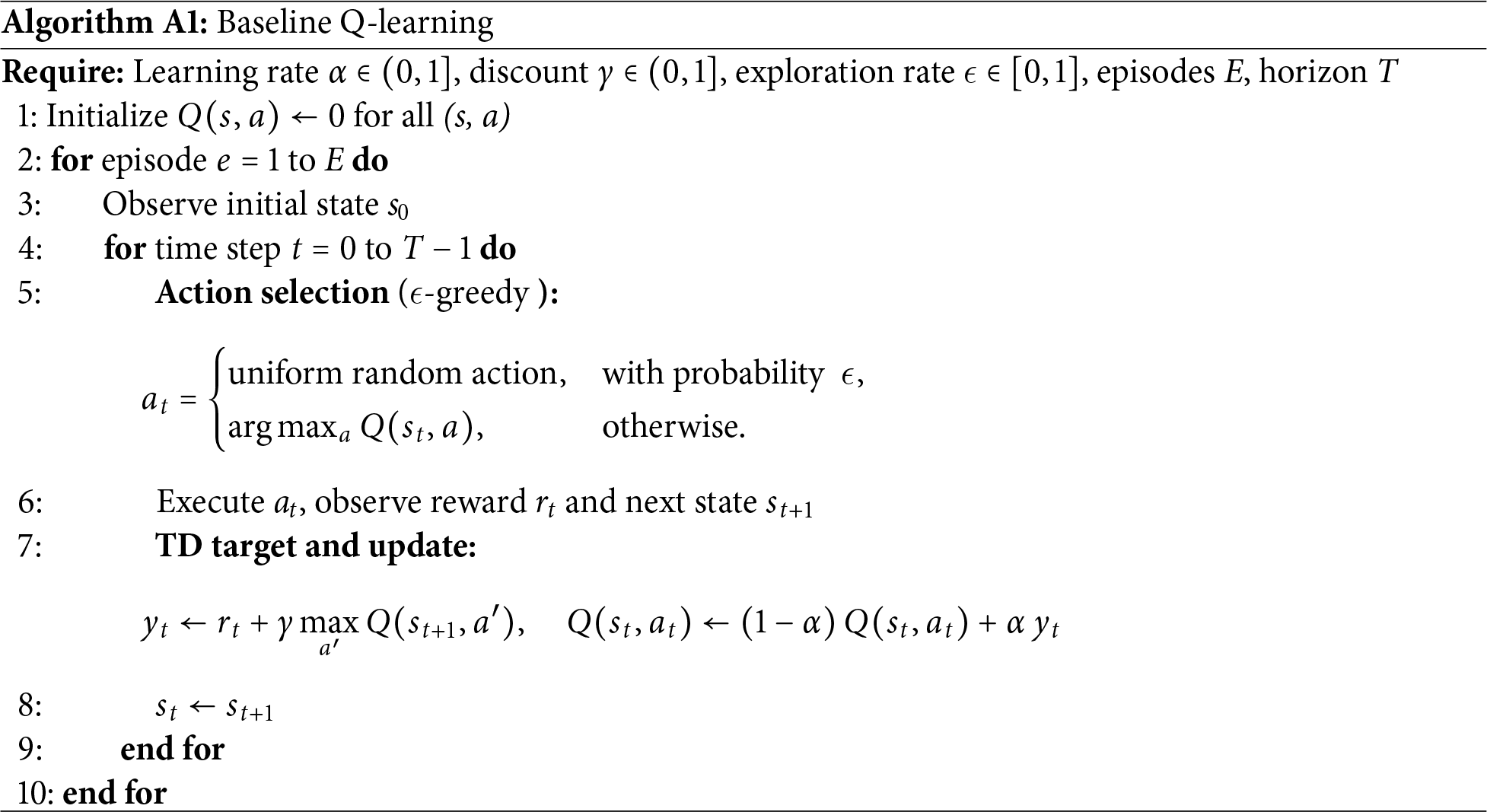
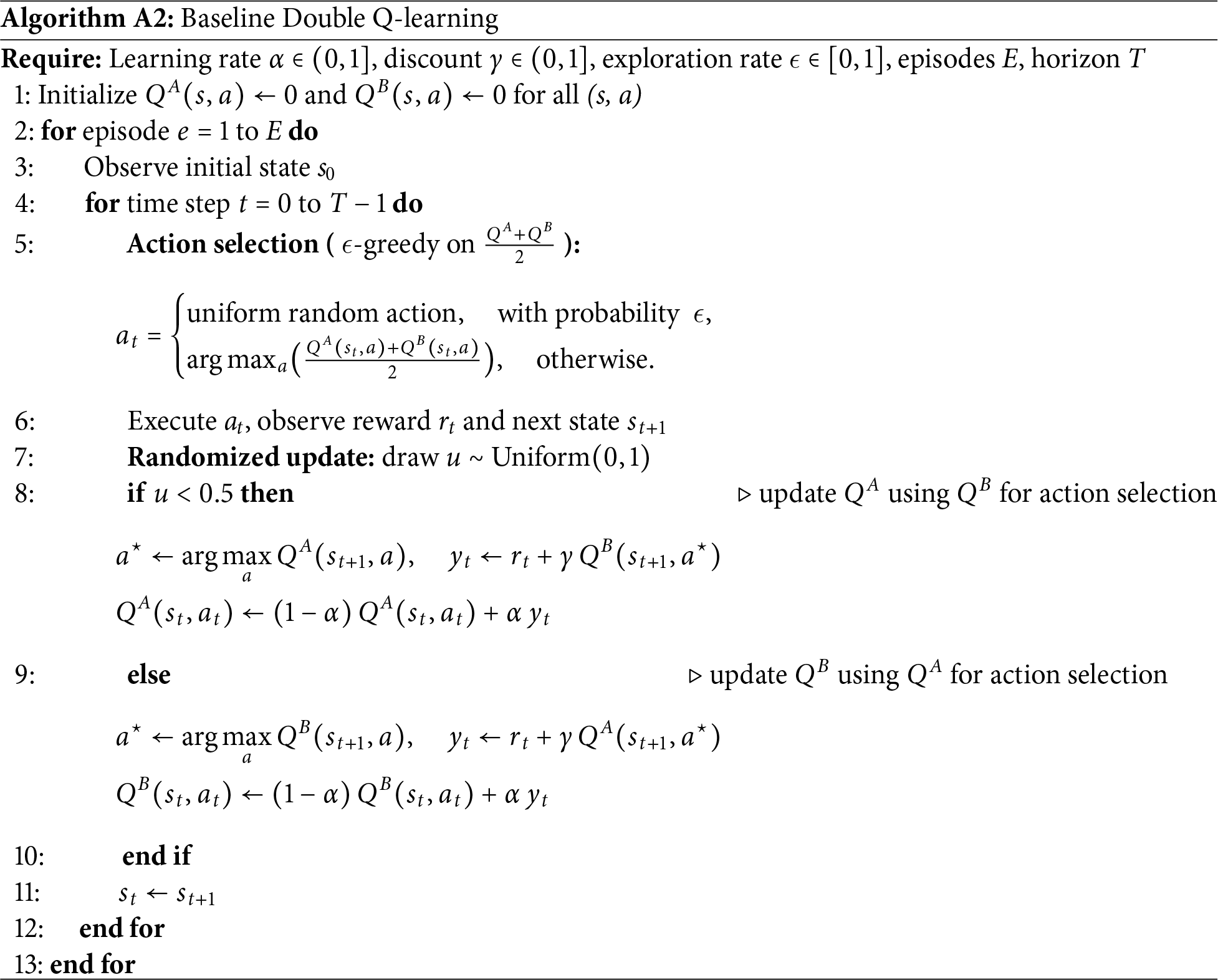
Appendix A.2 Double Q-Learning (Tabular): Note. Action selection, targets, and updates are shown inside the algorithms to avoid cross-references. The same simulation setup and metrics from Section 5 were used for a fair comparison with ARQ–UCB in terms of throughput, delay, fairness, blocking, and energy efficiency.
Appendix B Compact Theoretical Justification of the UCB-Based Exploration Term
This appendix consolidates the theoretical justification of the optimism-based exploration term in Eq. (8), using the policy and update rules in Eqs. (7)–(10). It formalizes the assumptions and convergence behavior of ARQ–UCB in the stationary tabular setting.
Appendix B.1 Assumptions: Assumption A1 (Stationary Tabular MDP). The environment is a finite MDP with state–action space
Assumption A2 (Sufficient Exploration). Under the UCB action-selection rule of Eq. (7), every state–action pair
where
Appendix B.2 Optimism and Regret Behavior: For each
which ensures
For a fixed state
consistent with Eq. (10). Thus the fraction of suboptimal choices decays as
Appendix B.3 Convergence of the Q-Update: Under Assumptions A1 and A2, the ARQ–UCB update of Eq. (9) behaves as classical Q-learning with diminishing perturbations, since
Proposition A1 (Asymptotic Optimality Under Stationary Dynamics). Under Assumptions A1 and A2, the ARQ–UCB update satisfies
and the cumulative regret is sublinear:
Sketch of justification. As
Appendix B.4 Reliability Cost Behavior: Let
which is consistent with the empirical stabilization in Figs. 6–8.
Appendix B.5 Non-Stationary Environments: When traffic or channel statistics evolve over time, Assumption B1 no longer holds. In such settings ARQ–UCB should be viewed as a tracking heuristic whose empirical robustness is demonstrated in Section 6. Developing formal regret and optimality guarantees for non-stationary V2X environments remains an important direction for future work.
1
References
1. Khan AR, Jamlos MF, Osman N, Ishak MI, Dzaharudin F, Yeow YK, et al. DSRC technology in Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) IoT system for Intelligent Transportation System (ITSa review. In: Recent trends in mechatronics towards industry 40. Singapore: Springer; 2021. p. 97–106. doi:10.1007/978-981-33-4597-3_10. [Google Scholar] [CrossRef]
2. Iqbal A, Nauman A, Khurshaid T. Lightweight reinforcement learning for priority-aware spectrum management in vehicular IoT networks. Sensors. 2025;25(21):6777. doi:10.3390/s25216777. [Google Scholar] [PubMed] [CrossRef]
3. Pawar V, Zade N, Vora D, Khairnar V, Oliveira A, Kotecha K, et al. Intelligent transportation system with 5G vehicle-to-everything (V2Xarchitectures, vehicular use cases, emergency vehicles, current challenges and future directions. IEEE Access. 2024;12:183937–60. doi:10.1109/access.2024.3506815. [Google Scholar] [CrossRef]
4. Durisi G, Koch T, Popovski P. Toward massive, ultrareliable, and low-latency wireless communication with short packets. Proc IEEE. 2016;104(9):1711–26. doi:10.1109/jproc.2016.2537298. [Google Scholar] [CrossRef]
5. Popovski P, Nielsen JJ, Stefanovic C, De Carvalho E, Strom E, Trillingsgaard KF, et al. Wireless access for ultra-reliable low-latency communication: principles and building blocks. IEEE Netw. 2018;32(2):16–23. doi:10.1109/mnet.2018.1700258. [Google Scholar] [CrossRef]
6. Bennis M, Debbah M, Poor HV. Ultrareliable and low-latency wireless communication: tail, risk, and scale. Proc IEEE. 2018;106(10):1834–53. doi:10.1109/jproc.2018.2867029. [Google Scholar] [CrossRef]
7. Abboud K, Omar HA, Zhuang W. Interworking of DSRC and cellular network technologies for V2X communications: a survey. IEEE Trans Veh Technol. 2016;65(12):9457–70. doi:10.1109/tvt.2016.2591558. [Google Scholar] [CrossRef]
8. Sutton RS, Barto AG. Reinforcement learning: an introduction. 1st ed. Cambridge, MA, USA: MIT Press; 1998. [Google Scholar]
9. Sutton RS, Barto AG. Reinforcement learning: an introduction. 2nd ed. Cambridge, MA, USA: MIT Press; 2018. [Google Scholar]
10. Luong NC, Hoang DT, Gong S, Niyato D, Wang P, Liang YC, et al. Applications of deep reinforcement learning in communications and networking: a survey. IEEE Commun Surv Tutor. 2019;21(4):3133–74. [Google Scholar]
11. Yang H, Xie X, Kadoch M. Intelligent resource management based on reinforcement learning for ultra-reliable and low-latency IoV communication networks. IEEE Trans Veh Technol. 2019;68(5):4157–69. doi:10.1109/tvt.2018.2890686. [Google Scholar] [CrossRef]
12. Watkins CJ, Dayan P. Q-learning. Mach Learn. 1992;8(3):279–92. [Google Scholar]
13. Hasselt H. Double Q-learning. In: NIPS’10: Proceedings of the 24th International Conference on Neural Information Processing Systems. Red Hook, NY, USA: Curran Associates Inc.; 2010. p. 2613–21. [Google Scholar]
14. Iqbal A, Khurshaid T, Nauman A, Kim SW. Adaptive communication model for QoS in vehicular IoT systems using CTMC. Sensors. 2025;25(6):1818. doi:10.3390/s25061818. [Google Scholar] [PubMed] [CrossRef]
15. Iqbal A, Khurshaid T, Qadri YA, Nauman A, Kim SW. Priority-aware spectrum management for QoS optimization in vehicular IoT. Sensors. 2025;25(11):3342. doi:10.3390/s25113342. [Google Scholar] [PubMed] [CrossRef]
16. Auer P, Cesa-Bianchi N, Fischer P. Finite-time analysis of the multiarmed bandit problem. Mach Learn. 2002;47(2):235–56. doi:10.1023/a:1013689704352. [Google Scholar] [CrossRef]
17. Liang L, Ye H, Li GY. Spectrum sharing in vehicular networks based on multi-agent reinforcement learning. IEEE J Sel Areas Commun. 2019;37(10):2282–92. doi:10.1109/jsac.2019.2933962. [Google Scholar] [CrossRef]
18. Ye H, Li GY. Deep reinforcement learning for resource allocation in V2V communications. In: 2018 IEEE International Conference on Communications (ICC). Piscataway, NJ, USA: IEEE; 2018. p. 1–6. [Google Scholar]
19. Nishio T, Yonetani R. Client selection for federated learning with heterogeneous resources in mobile edge. In: ICC 2019—2019 IEEE International Conference on Communications (ICC). Piscataway, NJ, USA: IEEE; 2019. p. 1–7. [Google Scholar]
20. Li X, Lu L, Ni W, Jamalipour A, Zhang D, Du H. Federated multi-agent deep reinforcement learning for resource allocation of vehicle-to-vehicle communications. IEEE Trans Veh Technol. 2022;71(8):8810–24. doi:10.1109/tvt.2022.3173057. [Google Scholar] [CrossRef]
21. Zhou Q, Guo C, Wang C, Cui L. Radio resource management for C-V2X using graph matching and actor-critic learning. IEEE Wirel Commun Lett. 2022;11(12):2645–9. doi:10.1109/lwc.2022.3213176. [Google Scholar] [CrossRef]
22. Zhang X, Peng M, Yan S, Sun Y. Deep-reinforcement-learning-based mode selection and resource allocation for cellular V2X communications. IEEE Internet Things J. 2019;7(7):6380–91. doi:10.1109/jiot.2019.2962715. [Google Scholar] [CrossRef]
23. Liu Y, Yu H, Xie S, Zhang Y. Deep reinforcement learning for offloading and resource allocation in vehicle edge computing and networks. IEEE Trans Veh Technol. 2019;68(11):11158–68. doi:10.1109/tvt.2025.3612473. [Google Scholar] [CrossRef]
24. Wu H, Jin J, Ma H, Xing L. Federation-based deep reinforcement learning cooperative cache in vehicular edge networks. IEEE Internet Things J. 2023;11(2):2550–60. doi:10.1109/jiot.2023.3292374. [Google Scholar] [CrossRef]
25. Ullah I, Singh SK, Adhikari D, Khan H, Jiang W, Bai X. Multi-agent reinforcement learning for task allocation in the internet of vehicles: exploring benefits and paving the future. Swarm Evol Comput. 2025;94:101878. doi:10.1016/j.swevo.2025.101878. [Google Scholar] [CrossRef]
26. Strehl AL, Li L, Wiewiora E, Langford J, Littman ML. PAC model-free reinforcement learning. In: Proceedings of the 23rd International Conference on Machine Learning. New York, NY, USA: ACM; 2006. p. 881–8. [Google Scholar]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools