
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

An Optimal Acceleration Control for Collision Avoidance in VANETs Using Convex Optimization
1 School of Computer Science and IT, Institute of Management Sciences, Peshawar, 25000, Pakistan
2 Information and Computer Science Department, King Fahd University of Petroleum and Minerals, Dhahran, 31261, Saudi Arabia
3 Interdisciplinary Research Center of Intelligent Secure Systems (IRC-ISS), King Fahd University of Petroleum and Minerals, Dhahran, 31261, Saudi Arabia
4 College of Computer and Information Sciences, Imam Mohammad Ibn Saud Islamic University (IMSIU), Riyadh, 13317, Saudi Arabia
5 Department of Mathematics & Computer Science, Brandon University, Brandon, MB R7A 6A9, Canada
6 Research Centre for Interneural Computing, China Medical University, Taichung, 40402, Taiwan
7 Centre for Research Impact & Outcome, Chitkara University Institute of Engineering and Technology, Chitkara University, Rajpura, 140401, Punjab, India
8 School of Computing, Gachon University, 1342, Seongnam-daero, Sujeong-gu, Seongnam-si, 13120, Republic of Korea
9 Department of Computer Science and Information Sciences, Arkansas Tech University, Russellville, AR 72801, USA
10 College of Computer and Information Sciences, Princess Nourah bint Abdulrahman University, Riyadh, 11671, Saudi Arabia
* Corresponding Authors: Syed Atif Moqurrab. Email: ; Dina S. M. Hassan. Email:
Computers, Materials & Continua 2026, 87(3), 16 https://doi.org/10.32604/cmc.2026.076104
Received 14 November 2025; Accepted 17 December 2025; Issue published 09 April 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Collision avoidance is recognized as a critical challenge in Vehicular Ad-Hoc Networks (VANETs), which demand real-time decision-making. It plays a vital role in ensuring road safety and traffic efficiency. Traditional approaches like rule-based systems and heuristic methods fail to provide optimal solutions in dynamic and unpredictable traffic scenarios. They cannot balance multiple objectives like minimizing collision risk, ensuring passenger comfort, and optimizing fuel efficiency, leading to suboptimal performance in real-world conditions. To tackle collision avoidance, this paper introduces a novel approach by defining the issue as an optimal control problem and solving it using the Convex Optimization model, which results in autonomous braking and acceleration control in smart vehicles. The model begins by collecting real-time vehicle data from its environment, which includes speed, position, and distance. It then uses this information to generate optimal driving profiles for each vehicle and calculate optimal responses. The informational data guides the vehicle to adjust its braking and acceleration autonomously, ensuring that safe distances are maintained among vehicles without compromising comfort. This approach empowers individual vehicles to make real-time decisions independently and adapt swiftly to changing traffic conditions. The performance of the proposed method is evaluated using a simulation study in MATLAB using the CVX optimization toolbox, comparing Adaptive Cruise Control (ACC) and Fuzzy Logic-Based Collision Avoidance (FLCA) using various performance metrics. Compared to these baseline protocols, our approach achieves a higher success rate in preventing collisions by maintaining smoother acceleration profiles and lower fuel consumption, yielding up to a 32% reduction in collision likelihood and a 19% improvement in fuel efficiency. Additionally, unlike existing rule-based and model-predictive approaches, the proposed method introduces a unified cost function that jointly minimizes collision risk, acceleration jerk, and energy consumption in decentralized VANET scenarios. This integration enables real-time decision-making while maintaining safety, comfort, and efficiency across varying traffic densities.Keywords
Vehicular Ad Hoc Networks (VANETs) demonstrate an advanced communication paradigm that enables smart vehicles to communicate with each other and with roadside infrastructure units (RSU) [1]. These networks are increasingly vital for improving road safety, traffic management, and efficiency. Vehicles are equipped with sensors and communication devices to exchange information about their position, speed, and direction [2]. This exchange of data helps prevent accidents and improve the flow of traffic. It aims to reduce collisions and optimize the movement of vehicles in real time. Conventional collision avoidance systems use various methods to manage the risks on the road [3]. These systems often rely on basic rules and sensor-based technologies, which make driving safer and more efficient. Despite their effectiveness, these methods have several limitations [4]. Firstly, the limited adaptability of these methods to various driving conditions makes them fail to operate in complex traffic scenarios involving multiple vehicles. Secondly, there is a lack of communication between vehicles, which delays their ability to make timely decisions [5]. This causes a slow reaction to sudden environmental changes, such as abrupt lane changes and high-speed maneuvers. Thirdly, these methods do not consider the vehicle’s physical dynamics, affecting collision avoidance efficiency [6]. Lastly, all these methods struggle to optimize acceleration and deceleration profiles in terms of control, which makes vehicles brake too hard, which could lead to unnecessary fuel consumption and discomfort [7]. To enable efficient vehicle coordination in VANETs, recent works have leveraged optimization methodologies. For instance, distributed MPC and convex feasible set methods address motion planning challenges in autonomous driving using model predictive control [8], while GPU-accelerated convex QPs provide computational efficiency in high-dimensional obstacle avoidance scenarios [9]. Concurrently, energy-conscious routing and clustering protocols have gained traction in VANET communication layers, promoting network longevity and sustainable operation [10]. Edge computing architectures integrating RSUs with connected vehicles have shown promise in reducing response delays in vehicular networks [11]. However, existing strategies rarely unify infrastructure-assisted communication, real-time control optimization, and energy efficiency. These methods depend upon centralized coordination, where a single controller aggregates global information. It requires heavy communication and large predictive approaches. Moreover, they differ from conventional methods because each vehicle solves its own local convex program using its neighbor information. This decentralized structure reduces communication load and eliminates dependence on a central coordinator. Latest decentralized techniques follow local-information principles, while this approach aligns with closed-form tractability. All these investigations on vehicle coordination continue to treat optimization and communication as independent layers, which restricts responsiveness and scalability in dense traffic scenarios.
To address these challenges, adaptive and efficient control strategies need to be developed that can dynamically respond to varying traffic conditions and communication delays. This study aims to develop a decentralized convex optimization framework that enables each vehicle in a VANET to perform real-time acceleration control using only locally available data, thereby enhancing both safety and energy efficiency. These data indicators comprise how a vehicle moves in response to various forces, such as acceleration. Using these methods minimizes the unnecessary use of energy in the control structure and ensures safety by making the system more responsive to environmental changes. One such method is to model the optimal control of vehicle acceleration using convex optimization [12]. It differs from existing convex or MPC-based methods as it incorporates a multi-objective formulation that enables real-time acceleration control using only local vehicle data, which improves comfort and safety simultaneously. The proposed approach further extends prior works by embedding decentralized optimization within a VANET-assisted cooperative driving framework. In this process, the system collects key vehicle data in real-time, which includes the vehicle’s speed, position, acceleration, braking status, and the distance to surrounding vehicles. Each vehicle is equipped with sensors that are used to gather this data. The data is then transmitted to a central processing unit located within the vehicle or through V2V (vehicle-to-vehicle) communication. After the data is collected, it is fed into the convex optimization model, which processes it in real time to calculate the optimal acceleration or deceleration required to avoid a potential collision. The convex optimization problem is dependent on based on the vehicle’s current state and the surrounding traffic conditions obtained from sensor data. This enables each vehicle to adjust its acceleration dynamically as traffic changes. The control system updates throttle and braking inputs to follow the optimal acceleration profile. The use of a convex optimization technique ensures that every decision is made with full awareness of vehicle dynamics and the surrounding environment. This results in a more adaptive and real-time system that improves road safety, reduces fuel consumption and enhances overall traffic flow. Moreover, it bridges the existing gap between convex, optimization-driven vehicle control and VANET-enabled cooperative communication, as illustrated in the following key contributions.
• Develop a convex optimization–driven acceleration control framework that integrates RSU-assisted V2V/V2I communication for decentralized, real-time collision avoidance in dynamic traffic environments.
• Model vehicle dynamics with convex optimization while validating the formulation using KKT conditions, ensuring both theoretical rigour and practical feasibility.
• Conduct a multi-dimensional performance evaluation, which includes safety (collision rate), efficiency (fuel use), comfort (jerk/acceleration), responsiveness, and network throughput by benchmarking it against established baselines ACC and FLCA.
• Integrate fuel efficiency directly into the convex optimization objective through acceleration and jerk minimization, demonstrating that the proposed method achieves collision-free, energy-efficient, and scalable performance in decentralized VANET environments.
The remainder of the study is organized as follows. Section 2 discusses the background and related work in collision avoidance systems. Section 3 presents the proposed methodology for optimizing acceleration using the convex optimization method. Section 4 describes the simulation setup and performance metrics used for evaluation. It presents the results and compares the proposed method with traditional approaches. Finally, Section 5 concludes the study and discusses potential future work.
Collision avoidance in VANETs has attracted significant research attention due to its impact on road safety, efficiency, and autonomous decision-making. Existing studies span rule-based systems, machine learning, optimization models, and cooperative driving frameworks, each contributing distinct perspectives on vehicular safety. This section explores key studies, explaining how they work, their benefits, and their drawbacks. It highlights representative contributions from recent literature, emphasizing their methodologies, merits, and limitations. Research work in [13] formulated a hierarchical Adaptive Cruise Control (ACC) system, which is designed to address safety in complex traffic situations involving sudden lane intrusions from adjacent directions. The system uses an improved time-to-collision measure based on the vehicle’s geometry, which makes risk detection more accurate. It combines a planner that switches between tracking and avoidance with a sliding-mode controller that keeps the vehicle stable. Tests with driver-in-the-loop simulations showed that the system could avoid crashes while still maintaining smooth and reliable control. This contribution bridges the gap between conventional ACC, which struggles in lateral intrusion scenarios, and computationally intensive optimization-based methods. García-Escalante et al. [14] developed a Level-1 Advanced Driver Assistance System (ADAS) using EfficientDet-D0 on NVIDIA Jetson TX2, coupled with fuzzy logic for automatic braking based on traffic light detection. The system achieved mAP = 0.96 at short ranges, demonstrating accurate real-time response but limited generalizability to dense traffic. A related contribution in [15], where the authors focus on collision avoidance and path planning using an optimization-based control framework. The study implements a Control Lyapunov Function–Control Barrier Function–Quadratic Programming (CLF-CBF-QP) approach to ensure safe navigation while respecting vehicle dynamics. A unicycle model is used, and the method is validated through both model-in-the-loop and real-time simulations across different obstacle scenarios. Results show that the controller can generate collision-free trajectories with high computational efficiency, which makes it suitable for real-time deployment.
Additionally, the study explores a hierarchical architecture that integrates a Deep Q-Network for high-level decision-making with the CLF-CBF-QP controller at the low level, demonstrating that learning-based adaptability and optimization-based safety can be effectively balanced within a unified control framework. Based on the notion of using reinforcement learning–based collision avoidance, Ref. [16] introduced a novel multi-agent framework known as DQ2N, which integrates Deep Q-Networks (DQN) with the concept of Quarrel. In this paradigm, two autonomous vehicles are modeled as intelligent agents working in the form of an evasion game, such that one acts as a pursuer and the other as an evader. The framework augments traditional MARL algorithms with game-theoretic strategies which allow each agent to continuously adapt its decisions in response to the opponent’s actions. This design enhances the agents’ ability to anticipate behaviors, refine overtaking maneuvers, and improve collision avoidance effectiveness. The approach shows significant improvements in safety, responsiveness when validated in both simulated environments and real-world racing scenarios. Autonomous Vehicles (AVs) have also been explored in the context of broader road safety challenges. Global traffic injuries remain a major issue, which is mostly due to reckless driving and the growing number of vehicles on the road [17]. A study in [18] mitigates such risks by enabling situational awareness and decision-making features of Internet of Vehicles (IoV) and Connected Vehicles (CVs). It is achieved by introducing a cooperative collision avoidance system based on Mobile Edge Computing (MEC), known as 2CAS-MEC. By utilizing MEC servers deployed along roadways, the system continuously analyzes hazard and traffic data, issuing proactive alerts to nearby vehicles. The approach integrates deep learning with 5G and cloud intelligence to ensure minimal latency and high bandwidth, enabling timely hazard identification and accident prevention. Experimental results showed that 2CAS-MEC outperformed existing approaches, delivering improved performance in collision avoidance and real-time responsiveness.
A Knowledge Guided Deep Learning method is used in [19] for Near Crash Detection (KGDL-NCD) in IoV. It uses an ensemble deep learning approach to blend a knowledge base system so that it achieves generic features of detection without making any domain-specific use of features. The proposed technique uses a set of multiple learning models with training images in which the features of the visuals and the corresponding values of losses are stored to direct the selection of models in the test. The NN-based approach leads to effective detection of the most appropriate models that can be used to process new data. To increase the scalability and security, an intelligent federated learning (FL) framework, where clusters of user devices are formed, is considered. The aggregation consists of two phases: First, a global aggregation is used to gather collective knowledge over all of the users, then a cluster-level aggregation to derive the models specific to each context. This approach enables users to choose his/her safety models, whether global or local. An experimental assessment of KGDL-NCD on benchmark datasets has shown that it performed better than baseline approaches. While the above approaches focus on collision prediction and avoidance, issues in routing and trust management have a direct impact on the reliability of vehicular communication essential for safety applications. A vehicular heterogeneity-based intelligent collision avoidance system is explained in [20], which uses V2V/V2I communication and machine learning to predict collision risks, achieving 96.5% accuracy with SVM while considering vehicular, weather, and behavioral factors. To address rear-end collisions, a Bayesian Optimized Enhanced Ensemble MLP model [21] combines CNN-based feature extraction with hyperparameter-optimized MLP ensembles, significantly improving prediction accuracy. For communication efficiency, a hierarchical Q-learning-based routing algorithm with grouped RSUs [22] utilizes multi-agent reinforcement learning and dual Q-tables to optimize routing decisions, which reduces overhead and delay while improving packet delivery ratio. Complementing this, a Graph-Based Trust-Enabled Routing (GBTR) scheme in [23] integrates direct, indirect, and contextual trust metrics to strengthen VANET security. The evaluation outperforms existing methods in packet delivery, delay, throughput, and resilience against malicious attacks. Several other works have also explored VANET optimization and intelligent resource management in related contexts [24,25].
Beyond communication and trust optimization, several recent works have applied convex and model-predictive control to enhance vehicle safety and energy efficiency. A Robust min-max MPC for platooning is described in [26], which formalizes disturbance-aware, closed-loop platoon control and shows how causal disturbance feedback improves string stability and robustness. Energy-efficient connected cruise control is illustrated in [27], which combines reactive and predictive controllers to exploit V2V information for substantial fuel savings in mixed traffic, yet it focuses on centralized predictive strategies. Likewise, work in [28] presents optimization-based trajectory planning and spatial–temporal trajectory planners demonstrate efficient convex approximations and corridor methods for safe, smooth motion planning suitable for real-time use. These contributions are important, but most either assume centralized coordination, do not explicitly integrate RSU-assisted V2I, or omit joint optimization of safety, comfort, and energy in a decentralized VANET setting. Our approach extends this body of work by (i) explicitly integrating RSU-assisted V2V/V2I into a convex QP framework, (ii) optimizing acceleration (with jerk penalization) as the decision variable while deriving dynamics and comfort metrics consistently, and (iii) validating feasibility and optimality via KKT conditions and a representative decentralized implementation that preserves scalability to larger platoons. In summary, while prior research has made significant progress across diverse control and communication paradigms, few efforts have holistically combined RSU-assisted communication, decentralized convex optimization, and energy-aware acceleration control. The next section presents the proposed framework addressing this gap.
The primary objective of the proposed model is to optimize acceleration control in smart vehicles and prevent collisions that occur primarily due to the short distance between vehicles. It also ensures that a real-time decision-making mechanism is adapted by utilizing V2V and vehicle-to-infrastructure V2I communication. The system consists of interconnected smart vehicles with sensors that continuously collect real-time data. A central control unit processes this data and applies convex optimization to determine the safest acceleration and braking actions. The model dynamically adjusts vehicle speeds based on environmental conditions, including road traffic and potential collision risks [29]. The system’s core components include smart vehicles, sensors, a communication network, a data processing unit, and a convex optimization module. These components interact through continuous data exchange, enabling vehicles to make autonomous yet cooperative acceleration decisions [30]. The model improves collision avoidance and enhances traffic flow efficiency by reducing unnecessary braking and acceleration. Fig. 1 demonstrates the significant components of the model and how they interact with each other.
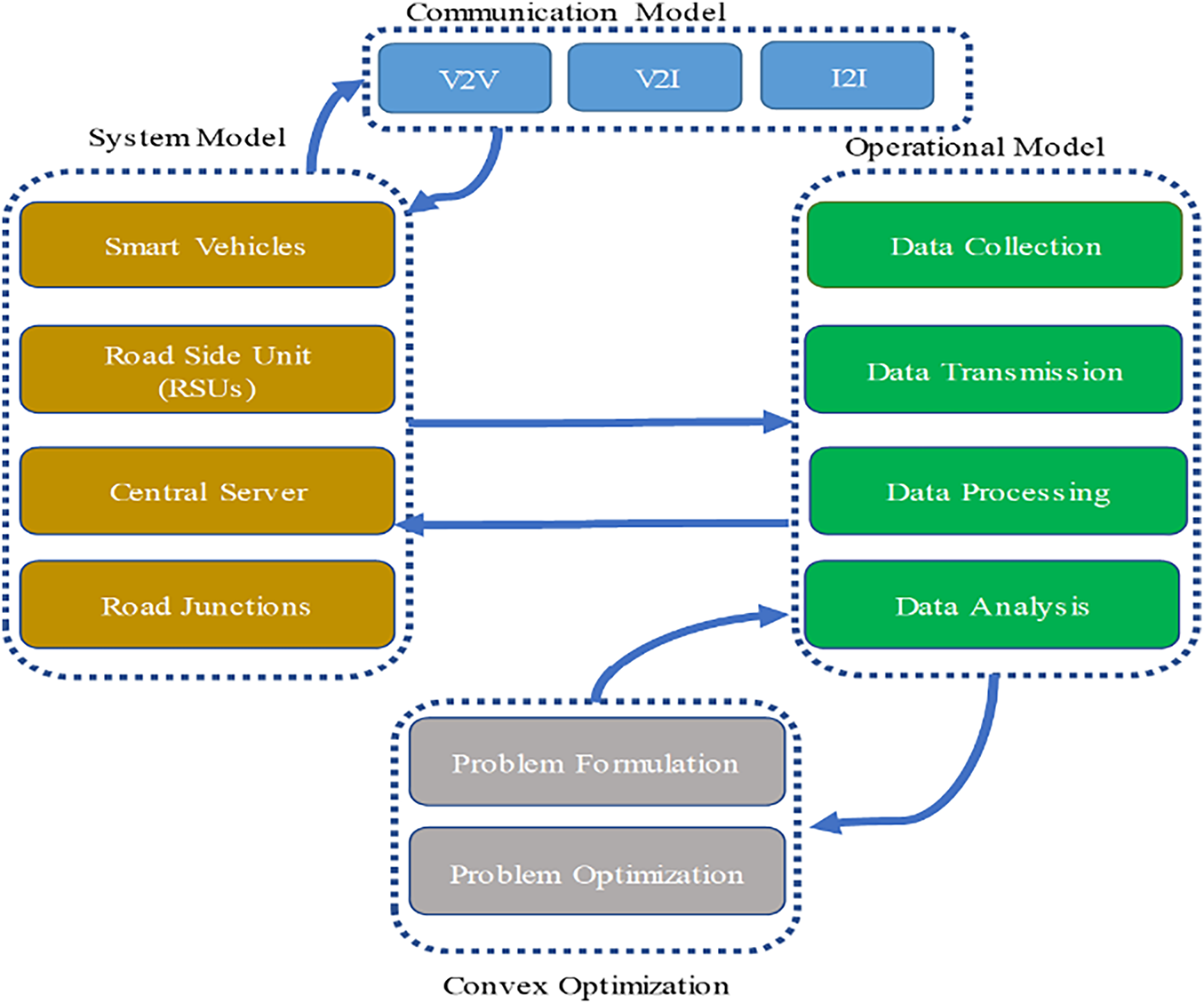
Figure 1: Principal components and interactions of the proposed model
The acceleration control optimization problem is demonstrated by considering N smart vehicles in motion along a two-way highway. The number of vehicles is presented mathematically as per Eq. (1) given below.
where each vehicle
where (xi, yi) represents the position of vehicle
where each RSU rj is a communication relay supporting V2I exchange and forwards messages between vehicles and a centralized control unit. To determine the optimality of the system communication among nodes is modelled under conditions with no packet loss, latency, fading, or interference. This assumption isolates and analyzes the behavior of the optimization framework without external network disturbances. The optimization dynamics remain unchanged under realistic VANET effects since packet delays or losses act as additive disturbances rather than structural modifications to the control law. These disturbances do not affect the quadratic formulation and updation of the decentralized update rule. The vehicles are categorized into lead, ego, and following. The lead vehicle refers to the one at the front of the traffic flow. In contrast, the ego vehicle is the vehicle under consideration for acceleration control, and the following vehicles are those behind the ego vehicle. Each vehicle in the system is comprised of an Onboard Unit (OBU), which is equipped with a combination of sensors that include LiDAR, radar, GPS, IMU (Inertial Measurement Unit), and cameras [31]. These sensors enable Vehicle-to-Vehicle (V2V) communication. They are responsible for gathering crucial data such as the vehicle’s position, speed, acceleration, jerk, and environmental information like road conditions and weather patterns. The study added bounded noise to each variable based on typical specifications of low-cost automotive sensors. Measurement of speed uses a noise bound of ±0.3 m/s because commercial wheel-speed sensors and IMU-based estimators commonly show 0.2–0.4 m/s absolute error at highway speeds. Likewise, distance measurements use a noise bound of ±0.5 m because low-resolution radar units operate with a 0.3–0.7 m error range under stable conditions. Acceleration measurements use a noise bound of ±0.2 m/s2 because consumer-grade accelerometers exhibit drift and vibration noise within this interval. These values are chosen to reflect realistic but controlled uncertainty. The controller is tested under these noisy states to verify stable responses when sensor readings are not accurate. The collected data is stored in a local edge unit, which is filtered and transmitted to the RSUs. The RSUs transmit aggregated data to a central cloud-based PostgreSQL database for long-term storage and optimization processing. This data is also used to maintain awareness and prevent potential collisions. The indicators in data are used for different purposes. Specifically, the position (xi, yi) and speed (vi) of the vehicle are essential for calculating safe distances and adjusting speed to avoid collisions [32]. A vehicle’s speed is calculated using the relationship in Eq. (4), given below.
where di is the distance vehicle i travels over time Δt, the vehicle’s acceleration ai and jerk ji are critical for adjusting speed in response to surrounding vehicles. These are calculated using Eq. (5), given below.
The vehicle’s relative speed and braking capabilities determine the safe inter-vehicle distance, which ensures sufficient space for safe deceleration. Eq. (6) gives the relationship for calculating the safe inter-vehicle distance.
where vi and vj represent the velocities of two adjacent vehicles, and
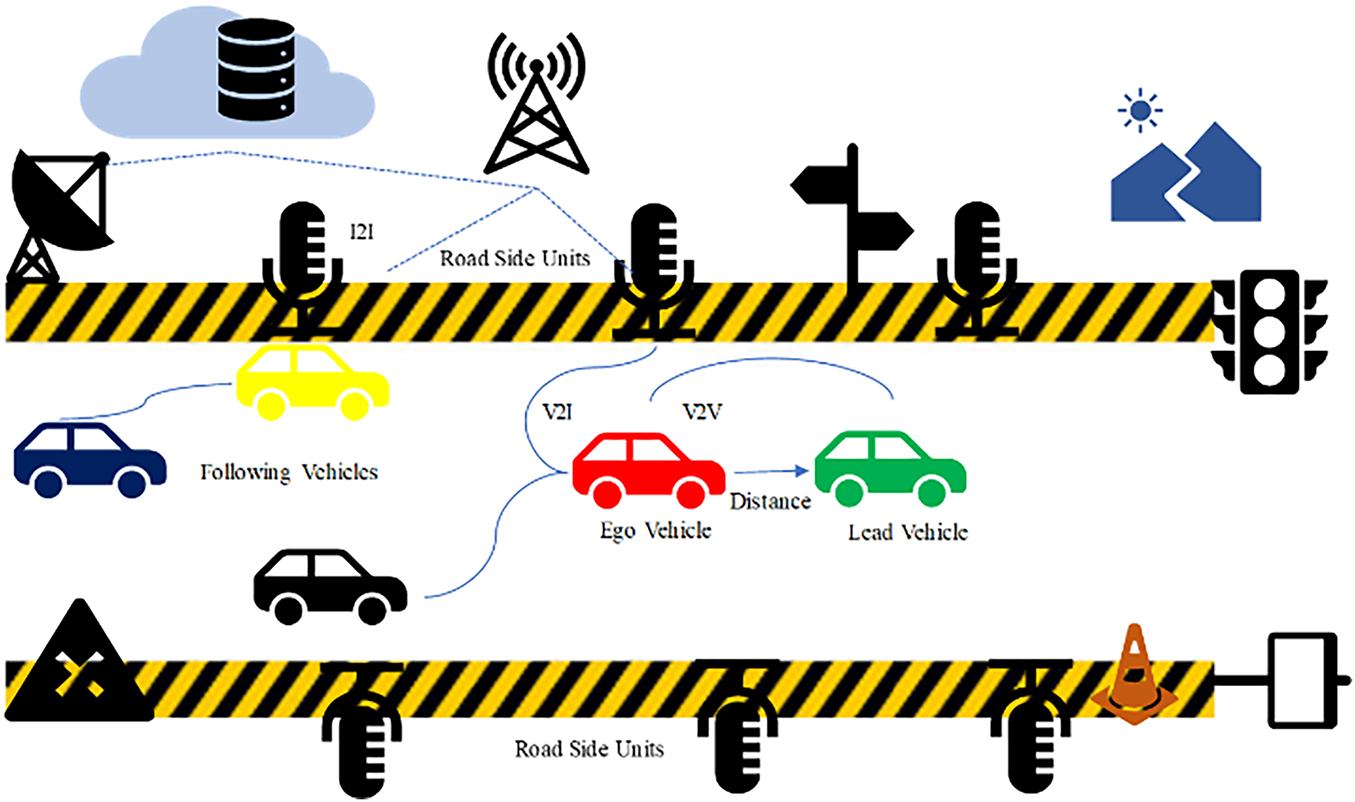
Figure 2: System architecture of the proposed VANET model
The traffic model assumes a straight and uninterrupted highway segment. It does not contain lane changes, merges, intersections, roundabouts or any other curved geometry of the road. All vehicles remain in their assigned lane and exclude complex terrains such as sudden cut-ins, evasive actions, and emergency braking events. These features avoid the incorporation of nonlinear disturbances and driver-specific randomness that can hide the behavior of the optimization process. This setup ensures that changes in safety distance, smooth acceleration, and jerk minimization are controlled by the RSU-assisted optimization framework rather than from uncontrolled external variations.
The operational model considers a general real-time driving scenario on a two-way highway, where N vehicles are moving along the road. RSUs facilitate V2V and V2I communication, ensuring information exchange among vehicles and infrastructure. The lead vehicle sets the motion pattern, while the ego vehicle adjusts its speed and acceleration based on surrounding traffic. The selection of a five-vehicle platoon is a deliberate and sufficient modeling choice, justified by both practical crash dynamics and computational design. Since critical collision chains typically propagate within a small cluster of vehicles, this configuration, comprising a lead vehicle, an ego vehicle, and three following vehicles, effectively captures the essential dynamics of inter-vehicle spacing, velocity adjustments, and the ripple effects of acceleration perturbations. Furthermore, the convex optimization framework is inherently local, relying solely on immediate neighbor information (velocity, acceleration, and distance). As the problem’s complexity scales linearly with the number of vehicles, the five-vehicle model accurately represents the controller’s behavior in larger-scale deployments. Therefore, this scenario is not a limitation but rather a minimal yet rigorous test case that convincingly validates the performance, scalability, and real-time feasibility of the proposed control strategy. The vehicles in the following category in the system receive real-time updates from RSUs and adjust accordingly to prevent collisions. The primary objective of the modeling is to ensure smooth traffic flow while minimizing acceleration variations, reducing jerk, and maintaining a safe inter-vehicle distance at all times. It should be noted that data regarding all these parameters are collected by sensors and stored in the nearest RSU. At a particular time, t = 0, the vehicles are randomly positioned along the highway. The lead vehicle starts moving at an initial velocity of vlead = 25 m/s while the ego vehicle follows at vego = 23 m/s with an initial distance of dego = 15 m from the lead vehicle. The following vehicles maintain varying distances, depending on their speeds and acceleration. The system collects real-time data about their position to determine spatial alignment. Velocity is used to understand motion trends. Acceleration to compute required adjustments. Jerk is used to ensure smooth transitions. An Inter-vehicle distance is used to evaluate safety margins. The velocity and acceleration of a vehicle are determined using Eqs. (4) and (5) above. Each participating vehicle transmits its real-time state data to the RSUs, which is processed to determine optimal acceleration control strategies using convex optimization. The inter-vehicle safe distance is determined dynamically based on the speed difference between vehicles and their braking capabilities to prevent collisions. The minimum safe distance is computed as per Eq. (6) described above.
If the value calculated observes the following condition di < dsafe, then an immediate speed correction is required to prevent rear-end collisions. The acceleration constraints are described in Eq. (7) to ensure smooth acceleration changes.
Likewise, the jerk constraints are checked as per Eq. (8).
This ensures that abrupt acceleration changes are avoided, which improves passenger comfort and vehicle stability. The jerk limits −1 to 1 m/s3 follow commonly reported bounds for comfortable longitudinal motion in production vehicles. Studies on human driving comfort and energy-efficient cruise control report that jerk values above 1 m/s3 increase fuel consumption and reduce stability. These values also match limits documented in adaptive cruise control and eco-driving research, where small jerk ranges ensure smoothness during dense traffic and allow convexity to be preserved in the optimization problem. Eqs. (1)–(8) define the general state-space representation of vehicle dynamics under RSU-assisted communication. These equations are valid for any N, forming the foundation for the convex optimization formulation. Algorithm 1 depicts the operational model, showing the operational workflow of the VANET network in the proposed model.
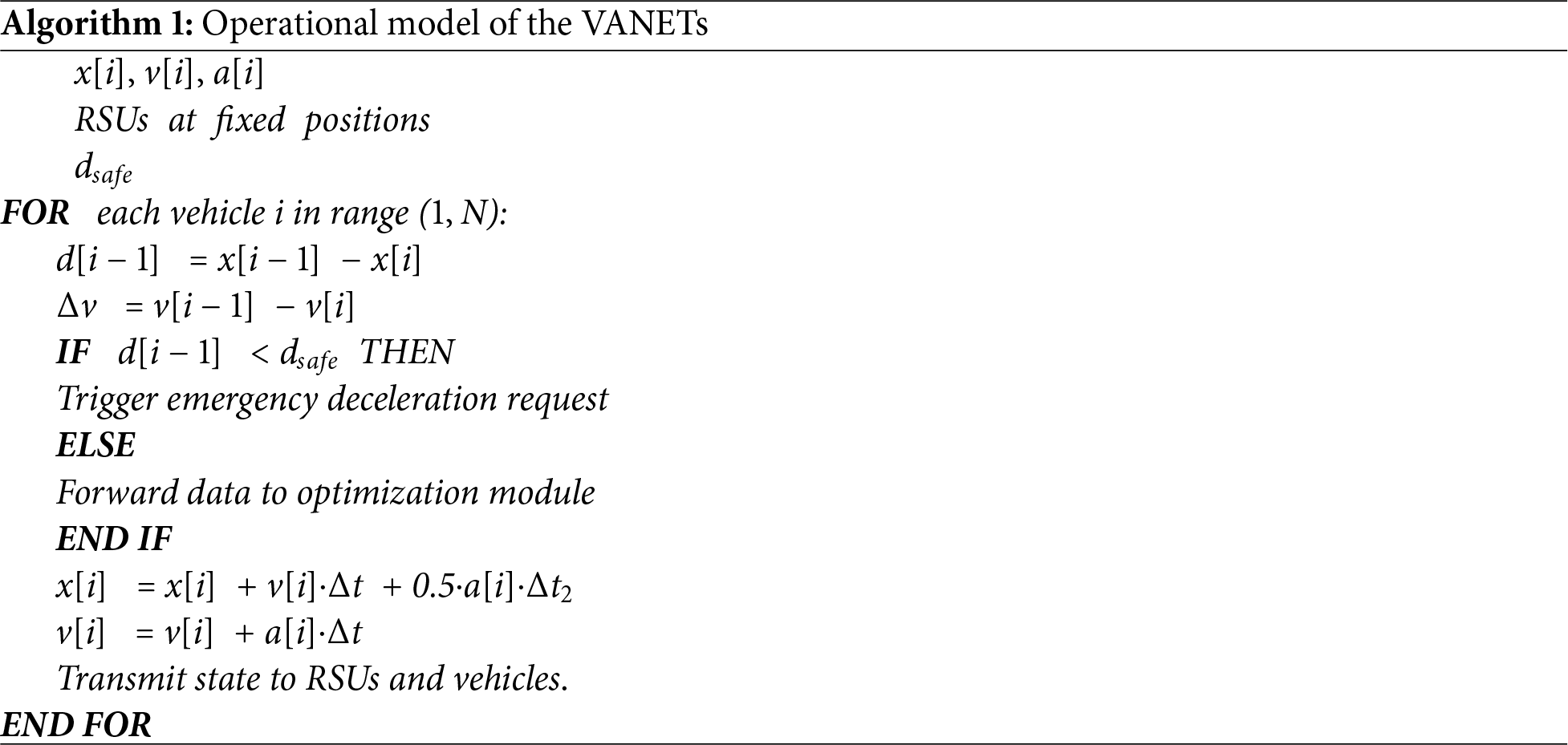
It shows how vehicles are deployed and how they organize and interact with other vehicles and RSU to establish a communication link. Fig. 3 shows the information flow among vehicles and RSUs.
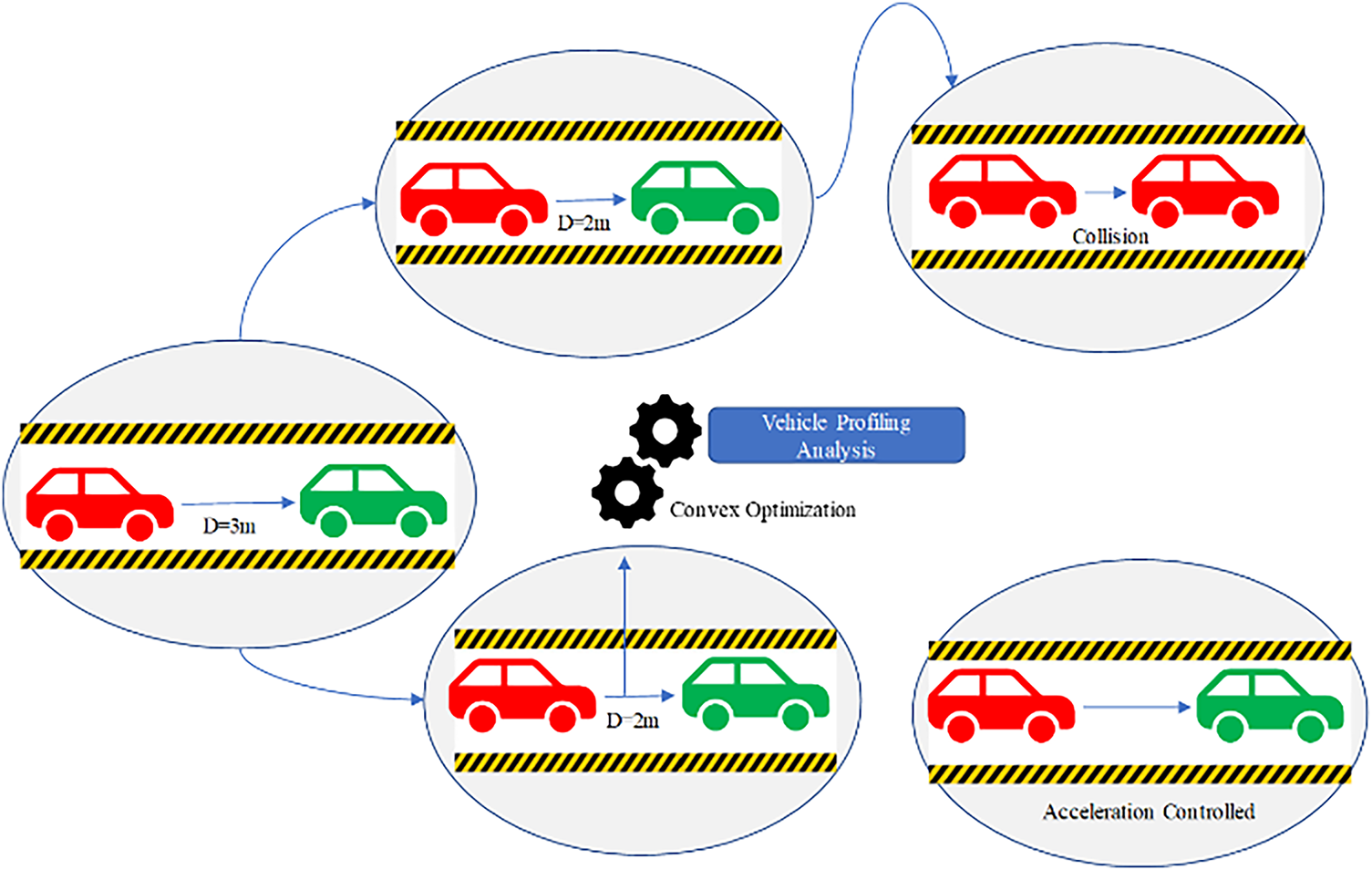
Figure 3: Operational model of the proposed VANET model
The communication model used in the study ensures ideal V2I links between vehicles and RSUs. Various indicators like packet loss, delay, fading, congestion, and channel interference introduce stochastic variations that can hide the direct effect of the optimization scheme on vehicle stability and safe-distance control. The aim is to evaluate the behavior of the acceleration and jerk minimization framework under fully observable and delay-free communication. This allows the effect of the optimization terms to be isolated without distortion from wireless uncertainties. In the future, realistic channel models and probabilistic packet-delivery patterns will be incorporated.
3.3 Optimization Problem Formulation
To optimize vehicle acceleration while preventing collisions, a convex optimization problem is formulated. The optimization variable is the acceleration a(t), while jerk ji(t) is treated as a dependent variable defined as the derivative of acceleration. The objective function aims to minimize the total acceleration energy, penalize the jerk by ensuring smoothness, and maximize the inter-vehicle distance. The purpose of reducing acceleration is to ensure energy efficiency while minimizing jerk, which aims to enhance comfort and reduce wear on the vehicle. Maximizing the inter-vehicle distance ensures that collisions are avoided, promoting safety. The convex optimization problem is formulated by defining an objective function that balances safety, comfort, and efficiency, subject to dynamic and physical constraints. The overall optimization can be expressed in compact continuous-time form as per Eq. (9) below.
where
where ai(t) is the acceleration of vehicle i,
The optimization problem can be explicitly expressed in Eq. (12) as a standard quadratic programming form depicted below:
The study uses uniform sampling with step Δt. The continuous integral form is approximated by a sum over sample instants, and Δt is absorbed into the cost weights. In discrete time, the jerk term is not an analytic derivative, but it is the finite change of acceleration between consecutive samples. This prevents mixing continuous and sampled notation and keeps all variables in the same discrete-time framework. The quadratic evaluation in Eq. (12) is formed by collecting all second-order terms into the matrix H and linear terms into the vector f. The entries of H come only from the squared-acceleration and squared-jerk penalties with non-negative weights. The spacing term is represented as a linear penalty in f after discretization, and it does not introduce negative curvature. Hence, H is positive semidefinite, and the problem in the equation above is convex subject to the condition presented in Eq. (13) below;
where the control input vector
The selection of α, β, and
Similarly, the velocity is updated according to the acceleration as per Eq. (15).
Likewise, Eq. (16) gives the jerk
The next important factor to define is the safe distance constraint, which ensures that vehicles maintain a safe distance from each other. The safe distance is defined as per Eq. (17), given below.
where Δt is the time step, amax is the maximum allowable acceleration, and α is the safety coefficient. This constraint commits that the vehicle will always maintain a safe distance from the vehicle ahead, thus preventing collisions. The condition can be mathematically expressed as per Eq. (18).
To ensure smooth driving, the proposed model imposes bounds on the acceleration and jerk. The acceleration must lie between
Similarly, jerk is constrained to avoid abrupt changes in acceleration, defined using Eq. (20).
Energy efficiency is not enforced as a hard constraint but instead incorporated into the objective function through a quadratic penalty on acceleration and jerk. The cumulative energy-related term is expressed in Eq. (21) below:
This term contributes to the overall cost function and ensures reduced energy consumption, lower operational costs, and enhanced sustainability. In addition, the optimization problem penalizes unsafe distances between vehicles by including an inverse distance term as shown in Eq. (22):
In this way, only physical feasibility (acceleration, jerk, safe distance) is treated as a hard constraint, while energy and distance penalties are incorporated into the objective function to balance safety, comfort, and efficiency. By penalizing small distances, the optimization encourages vehicles to adjust their speeds and accelerations to maintain a safe distance, reducing the risk of collisions. To incorporate safety constraints into the optimization framework, this study formulates the Lagrangian as shown in Eq. (23).
where λ is the Lagrange multiplier associated with the safety constraint. To solve this optimization problem, the Lagrangian should be minimized concerning the accelerations and jerks of all vehicles, considering the constraints on acceleration, jerk, and inter-vehicle distance. This formulation does not replace the objective function but rather combines the objective with the relaxed constraint to form the Lagrangian. The constrained optimization is then solved using the KKT conditions, ensuring that both safety requirements and performance objectives are satisfied. A quadratic programming mechanism resolves the optimization problem [34]. The optimization algorithm should minimize the total objective function J subject to the constraints. The system must ensure that the inter-vehicle distances are safe, minimize energy consumption, and reduce jerk for passenger comfort. The solution to this optimization problem will yield the optimal acceleration profiles for each vehicle. For instance, consider the following Eqs. (24) and (25) for vehicle one and vehicle two, we get:
Substituting the values of
Using the iteration process, the study determines the optimal acceleration profiles for all the vehicles in the system. Once the optimal accelerations are determined, the system must enforce the safety constraints by ensuring the distance between vehicles remains above the safe threshold. If any vehicle violates the safety constraint, the acceleration and jerk values are adjusted to bring the vehicle back into compliance. Algorithm 2 shows the optimization of braking systems in VANETs.
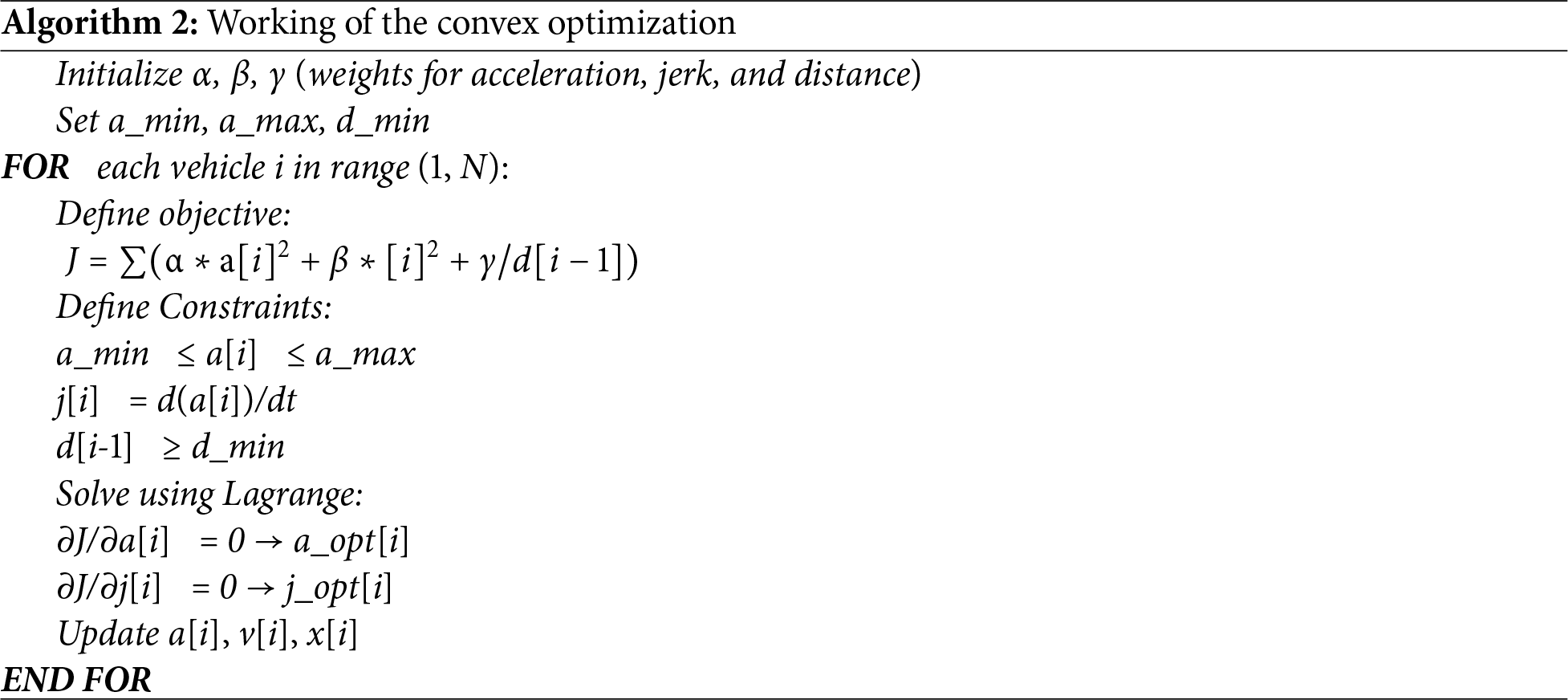
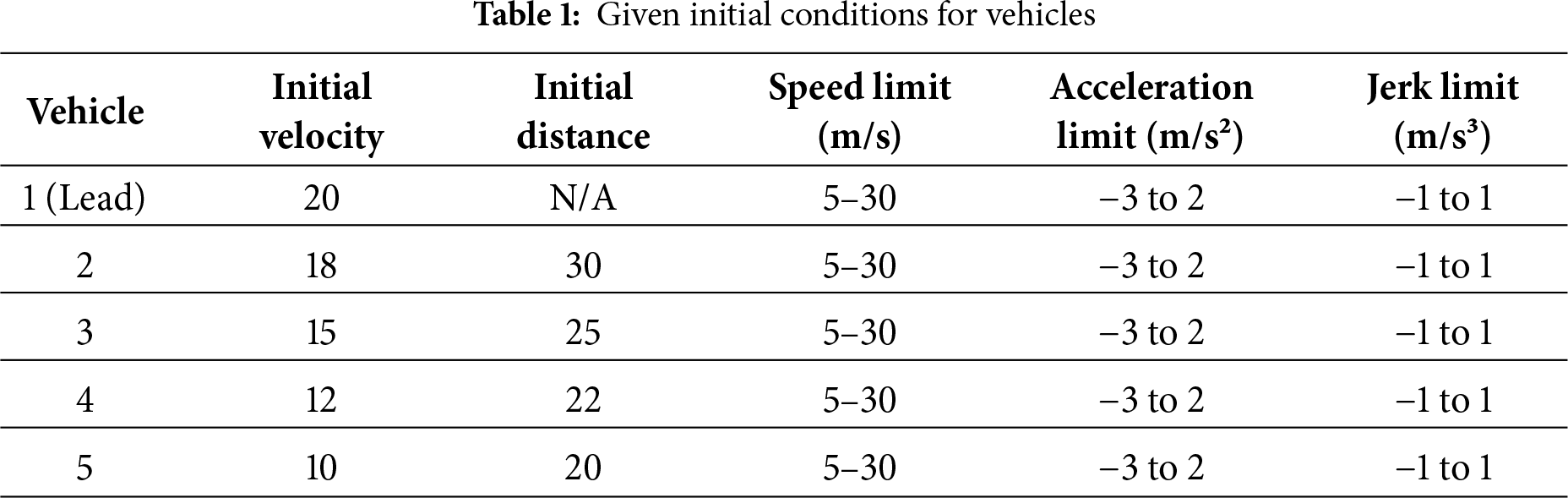
For evaluation purposes, we consider a five-vehicle platoon as a representative case study. This choice reflects the fact that collision risks are typically local, involving only a small neighborhood of vehicles, while keeping computational complexity tractable. Importantly, since convex optimization depends on local neighbor dynamics, the formulation is scalable and directly extendable to larger platoons. The simulation assumes 10 RSUs deployed along the highway to provide V2V and V2I connectivity. The optimization is performed iteratively to ensure that the accelerations and jerks are adjusted in real-time, optimizing the overall system performance. The use of a convex optimization approach improves traffic flow, minimizes fuel consumption, and enhances passenger comfort. Table 1 depicts the data for the five vehicles, one leading and the others following.
The following process calculates the optimal acceleration values for each vehicle.
Step 1: Eq. (28) below represents the initial position, velocity, and acceleration of each vehicle i.
By using Newton’s equations of motion and substituting the values, Eqs. (29) and (30) are formed.
Since the acceleration is optimized through the convex quadratic cost function, the Euler–Lagrange condition applied to the objective function leads to a second-order homogeneous differential equation of the form
where C1 and C2 are constants to be determined using initial values.
Step 2: By substituting t = 0 into the acceleration equation, we get Eq. (32):
Thus, C1 = ai(0). For defining the jerk parameter, Eq. (33) is used.
At t = 0, the equation can be rewritten as Eq. (34)
Thus, the C2 can be calculated as per Eq. (35) below.
The acceleration equation is fully defined and depicted in Eq. (36) below.
Step 3: Using the initial distances di−1(0), the safe constraints are applied, yielding the results below in Eq. (37).
By substituting the given initial values, the following results are obtained in Eq. (38).
Solving this for ai ensures that each vehicle maintains a safe distance.
Step 4: Since we have an optimization problem, minimizing the objective function is now shown below in Eq. (39)
By taking the derivative, we get Eq. (40), which is given in Eq. (40).
Using the jerk equation, we get Eq. (41), as given below.
The optimized acceleration values are calculated by solving numerically for each vehicle with the given initial conditions.
These values ensure smooth acceleration, safe inter-vehicle distance, and energy efficiency.
3.4 Karush-Kuhn-Tucker (KKT) Validation
To check whether the acceleration values defined for different vehicles in a VANET network are optimized, it is validated and cross-checked using Karush-Kuhn-Tucker (KKT) Conditions. These conditions are used to confirm a problem as optimized per the constraints. KKT-based validation has been widely used in intelligent vehicle control [35–37]. The implementation of KKT to a problem comprises different conditions that must hold for the optimal acceleration of the vehicles under the given limitations. In the first step, a Lagrangian function is defined for the problem, which combines the objective function and constraints using Lagrange multipliers. The Lagrangian, denoted by L for this problem, is described below in Eq. (42).
where
By putting the value of acceleration
The study adopts complementary slackness such that when a constraint is inactive, like when a vehicle is far from the safety boundary, the corresponding multiplier is zero. When the constraint becomes active, the multiplier becomes positive and enforces the boundary condition. This ensures the solution satisfies all KKT optimality requirements. Similarly, to check the values for jerk ji, Eq. (45) is used.
This gives Eq. (46), as described below.
where sgn is the sign function indicating the direction of ji. The derivative of the safe-distance constraint with respect to acceleration ai is obtained by differentiating the vehicle kinematic relation di−1 = xi−1 − xi. Because acceleration influences position through the double integral of the motion equations, its derivative is computed using the chain rule applied to the discrete kinematic update. It is evaluated numerically using the discrete-time model, which provides the required partial derivative used in Eqs. (44) and (46). The third condition is Primal Feasibility, which ensures that the constraints considered for optimization are satisfied in the results shown in Eq. (47).
The fourth condition is the dual feasibility condition illustrated in Eq. (48), which checks whether the Lagrange multipliers generated are non-negative or not.
Lastly is the complementary slackness, which checks whether the Lagrange multipliers are only non-zero when their corresponding constraints are active, as defined in Eqs. (49) and (50) below.
Using the above KKT conditions, substituting the given values into the Lagrangian and solving for the optimal values of ai, ji, λi, and μi. It is to be noted that all safety constraints in the Lagrangian are enforced pointwise in time. Each inequality is evaluated at every discrete instant tk, and the associated Lagrange multipliers scale the constraint violation at that same instant. The objective is integrated over the time horizon, whereas constraints act instant-by-instant. This preserves dimensional consistency and matches practical control where safety must be satisfied at each moment. Each vehicle’s optimal acceleration and jerk values are calculated based on the interplay between these constraints and the objective function. After solving the equations numerically, we would get the optimal acceleration values for each vehicle, such as:
These optimal accelerations satisfy the constraints while minimizing the objective function. The KKT conditions ensure that the solution satisfies the safe distance and jerk limitations while optimizing the acceleration for efficient and safe vehicular movement. The jerk constraint is non-smooth at ji = 0. In the KKT framework, this is handled using sub-gradients. For points away from zero, the derivative is well defined and equals ±1. At ji = 0, the sub-gradient falls within the interval [−1, 1]. Because it evaluates piecewise derivatives depending on the active set, the KKT conditions remain valid. The sign function used in the formulation represents the correct sub-gradient for the active constraint. Algorithm 3 validates optimality using KKT conditions.
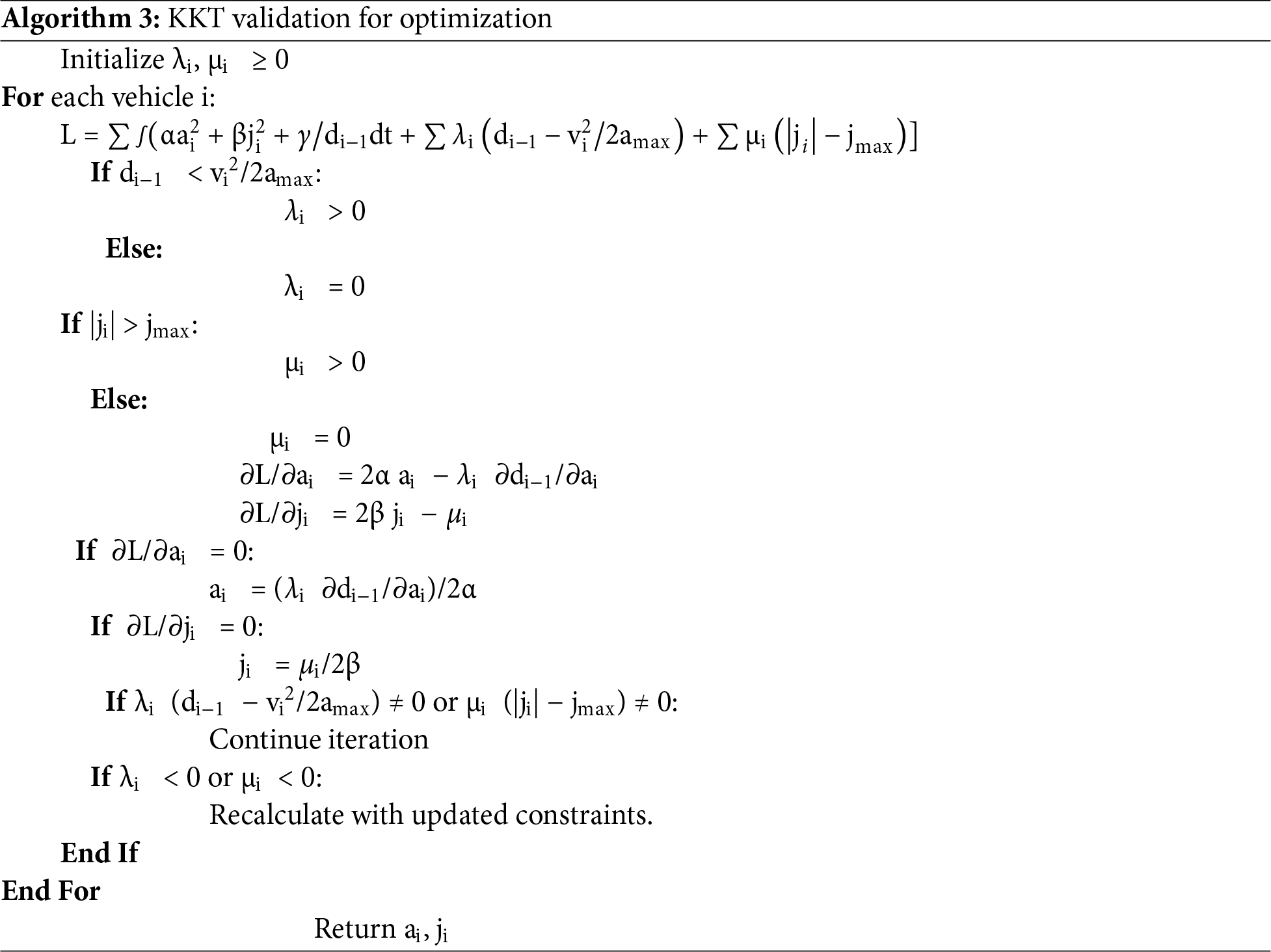
The algorithm acts as a critical check by initializing Lagrange multipliers (λ, μ) for the safety and jerk constraints. It then iteratively validates that for each vehicle, such that the solution satisfies the necessary conditions for optimality. The stationarity status of the Lagrangian (
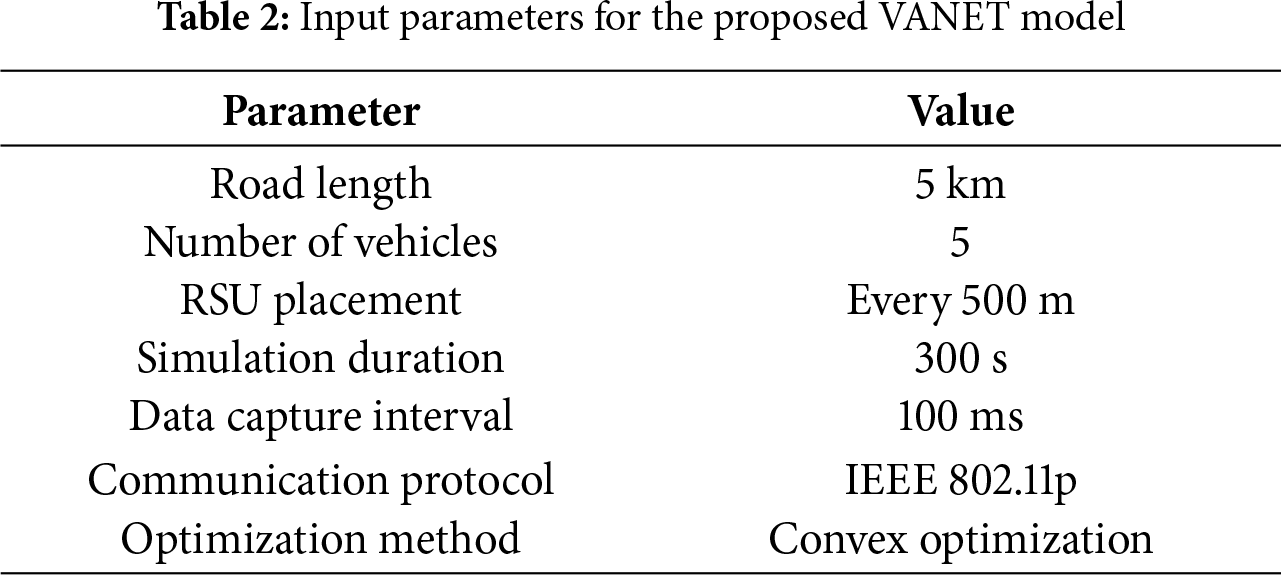
To evaluate the effectiveness of the proposed acceleration control strategy, this study will perform a series of comprehensive simulations using a dynamic VANET model. The simulations were carried out in MATLAB using a two-lane vehicle-following model with 5 vehicles along a 5 km road under varying traffic densities. The number of vehicles allows optimized spacing, stability, and jerk patterns. The formulation is scalable because each vehicle solves the same local quadratic program with identical structural constraints. The computational load grows linearly, so larger fleets can be supported without requiring structural changes to the optimization. Each run lasted 300 s, with random initial velocities between 10–30 m/s. The convex optimization problem was solved using the CVX toolbox, while inter-vehicle communication was modeled through IEEE 802.11p with a 100 ms data capture interval. The simulation was repeated for multiple random seeds to ensure consistency and statistical reliability. This setup is comprised of multiple vehicles deployed in a simulated highway environment. Each vehicle shares critical information, such as its position, velocity, and distance, with other vehicles, creating an interconnected network. These data are used by vehicles to calculate optimal acceleration values in real-time, optimized by the proposed convex optimization algorithm. The purpose is to assess whether the proposed method improves safety, fuel efficiency, and traffic flow compared to existing strategies like ACC and FLCA. The simulation uses a 5 km stretch of highway with five vehicles of varying types. These vehicles communicate wirelessly with each other and exchange real-time information through OBUs. Additionally, RSUs are placed every 500 m to maintain consistent communication and data exchange between vehicles and the network. Data is gathered every 100 ms to simulate real-time processing, ensuring that the acceleration values are adjusted dynamically. Each vehicle has the capacity to calculate its optimal acceleration based on neighboring vehicles’ positions, velocities, and the traffic ahead. This information helps make critical decisions related to maintaining safe following distances and reduces the risk of collisions. The experiments assume a communication and noise-free sensing environment to isolate the behavior of the optimization framework. VANET delays and sensor noise introduce additional disturbances that can mask the core control dynamics. These factors are well studied in the literature, and their integration can be layered on top of the present optimization without changing its structure. The simulation also includes ACC and FLCA as baseline methods. These two approaches are tested under identical conditions to assess how they compare regarding safety, fuel efficiency, and traffic throughput. Table 2 demonstrates various simulation parameters used in the study.
The results obtained from the proposed method are compared with those of ACC and FLCA. ACC uses a simple rule to maintain a safe distance based on a fixed time gap. These methods are selected because they represent deterministic longitudinal controllers and form the standard baseline for safety-focused studies. Similarly, advanced MPC and RL methods provide robust prediction models, but their performance strongly depends on parameterization and scenario-specific training. This often leads to suboptimal acceleration adjustments, especially in heavy traffic conditions. On the other hand, FLCA uses a fuzzy logic system that determines the appropriate acceleration for a vehicle. While FLCA provides greater flexibility, it can suffer from inconsistent results in dynamic traffic scenarios. The improvement results reported in the results section are computed relative to the two baseline controllers, ACC and FLCA. These methods are evaluated under the same simulation conditions. The reductions in collision risk and fuel consumption, therefore, represent direct performance gains over these two reference methods. The convex optimization method can continuously adjust acceleration values based on real-time data, which ensures a more efficient and responsive approach to collision avoidance. It should be noted that the present evaluation is restricted to a straight highway scenario with a constant lane structure. While this setting enables a clear assessment of the proposed optimization model, it does not capture more complex driving situations such as sudden cut-ins, emergency stops, or curved road geometries. These scenarios are left for future extensions of the framework, where the inclusion of lane-changing behavior and road curvature will provide a more comprehensive validation of the method.
4.1 Collision Risk vs. Convex Optimization
In a VANET environment, all vehicles maintain different initial speeds and distances. An unexpected increase or decrease in acceleration results in unsafe distances, collisions, and disruption of smooth traffic. This phenomenon is analyzed by Time to Collision (TTC) for each vehicle, which is mathematically depicted as per Eq. (51) below.
where D is the initial gap, and Vlead and Vfollower are the speeds of the leading and following vehicles, respectively. Before the collision, the analysis in the initialization stage shows that vehicles 3, 4, and 5 reach critical TTC values (below 2 s), indicating that a possible collision might occur. For instance, vehicle 3 has an initial speed of 15 m/s and a distance of 25 m, which is closer to the gap than vehicle 2 in just 1.67 s and can lead to an unavoidable crash. Similarly, vehicle 5 has an initial speed of 10 m/s and is about to collide within 1.0 s. Table 3 shows TTC values before the collision of vehicles.

It shows that without optimization, these vehicles would crash within 1–2 s, resulting in serious safety risks. To mitigate this, this study uses a convex optimization technique that dynamically adjusts each vehicle’s speed and acceleration while maintaining a safe following distance of at least 3.5 m. This also ensures a smooth reduction in velocity without abrupt braking and improves safety and energy efficiency. The optimized speeds are computed using the equation given in Eq. (52).
where Aopt is calculated based on safe deceleration constraints. After optimization of the acceleration, the TTC values increase significantly. It shows that each vehicle has enough time to react to a traffic issue and adjust safely. Vehicle 3, which previously had a TTC of 1.67 s before optimization, now maintains a TTC of 6.8 s. This prevents any risk of collision. Similarly, vehicle 5’s TTC increases from 1.0 to 8.5 s, ensuring a comfortable driving experience. Table 4 depicts the TTC after optimization.
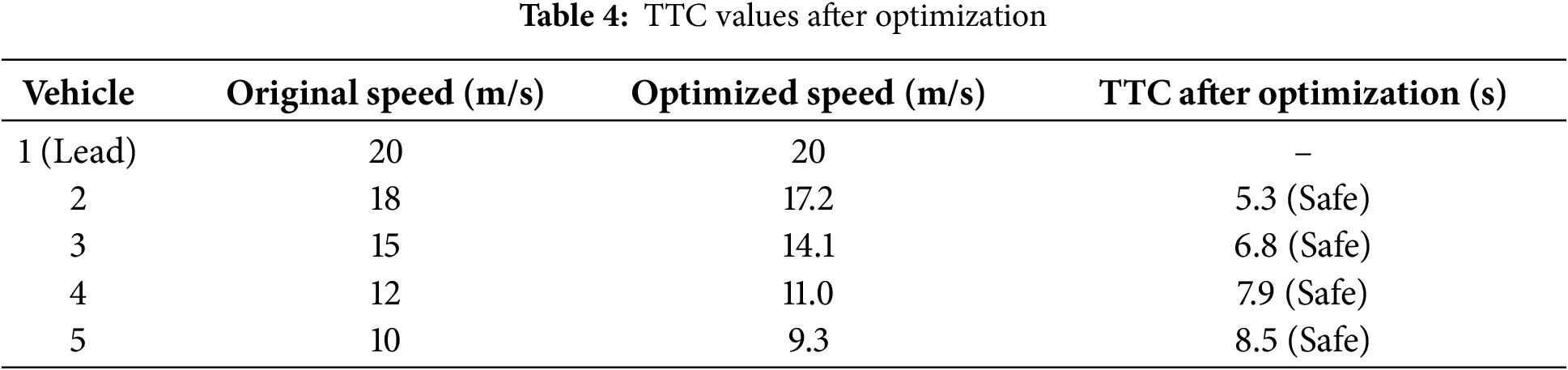
The numerical comparison sheds light on the significant advantages of convex optimization. It shows that vehicles experienced high-speed differences and short TTC values before optimization, which increased the chances of collision. However, with the usage of convex optimization, speed is adjusted gradually, maintaining a safe distance among vehicles and ensuring no abrupt braking or sudden stops, as depicted in Fig. 4.
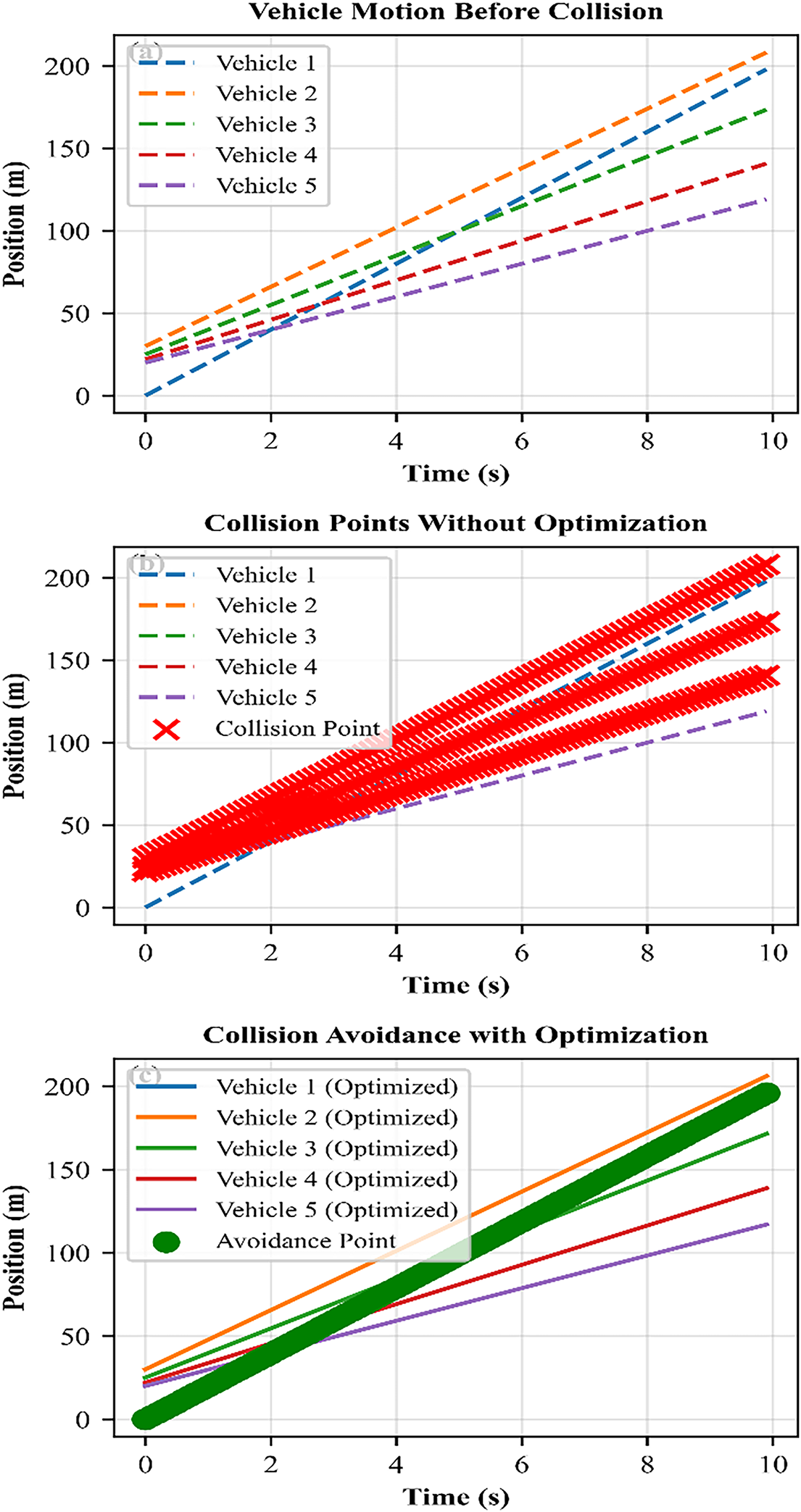
Figure 4: Collision analysis before and after optimization
The analysis shows that without the optimization, vehicles would collide due to short reaction times, while the incorporation of optimized control strategies prevents accidents and maintains traffic stability.
4.2 Performance Metrics and Evaluation
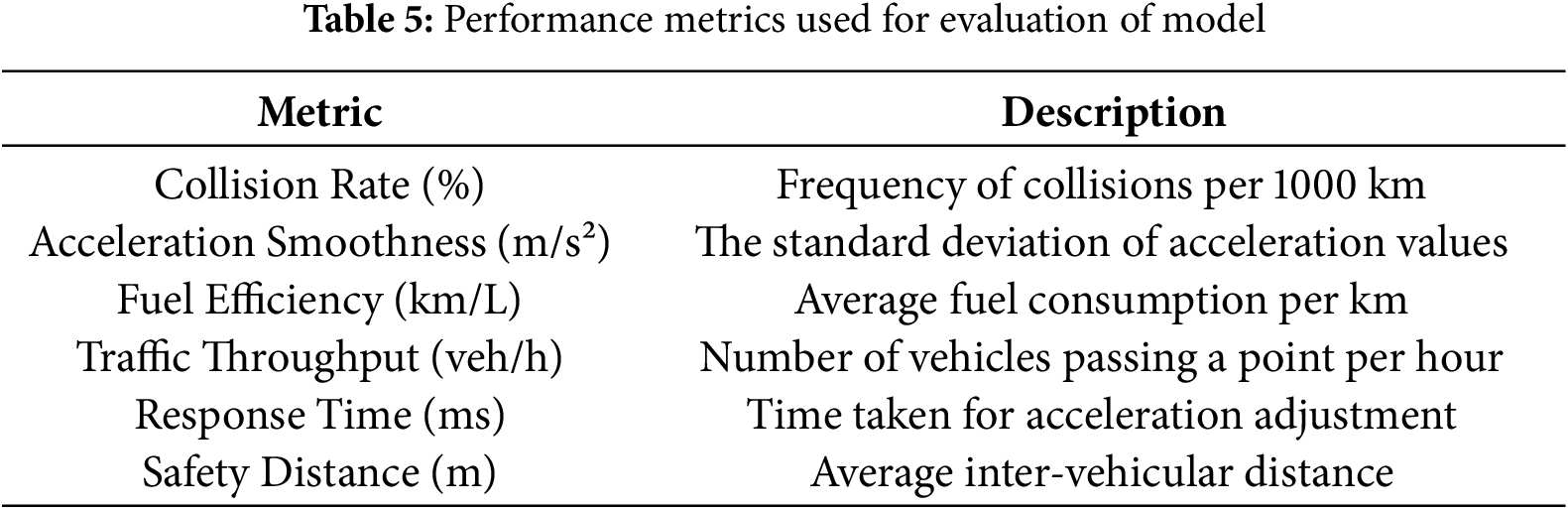
The proposed method’s performance is evaluated based on several key metrics. These metrics include collision rate, acceleration smoothness, fuel efficiency, traffic throughput, response time, and safety distance. All these metrics play an important role in assessing the overall effectiveness of an acceleration control strategy. Table 5 defines and describes the performance metrics used for evaluation. These metrics are used to quantify different aspects of system performance, which include safety, efficiency, comfort, and energy sustainability. Specifically, they capture inter-vehicle spacing behavior, collision likelihood, fuel efficiency, and passenger comfort through jerk analysis, and predictive safety via time-to-collision estimation. Together, these indicators offer a balanced perspective on how effectively the proposed method enhances both driving safety and operational efficiency under varying traffic conditions.
The collision rate measures the collision frequency between vehicles on a specified track. It is expressed as a percentage of the total number of vehicles involved in collisions over a defined time period. This metric reflects the safety performance of a traffic control system, where lower values indicate better safety. In this study, the collision rate is crucial in evaluating how effectively each acceleration control strategy prevents collisions between vehicles in the dynamic VANET environment. A higher degree of collision rate suggests that the system struggles to maintain safe distances between vehicles, while a lower rate indicates better collision avoidance. Additionally, a high value suggests poor safety performance, which means that vehicles are too close to each other, which may cause accidents. On the other hand, a lower collision rate indicates that the vehicles maintain safer distances so that collisions are minimized. Mathematically, it is calculated as per Eq. (53) below. This metric directly quantifies the system’s ability to maintain safe inter-vehicle distances and avoid contact under dynamic traffic conditions.
In Fig. 5, the Convex Optimization method achieved a collision rate of 2.4%, which is the lowest among the three strategies. ACC had a collision rate of 4.1%, and FLCA had a rate of 3.3%. This clearly indicates that the convex optimization strategy is more effective at avoiding collisions in dynamic traffic environments.
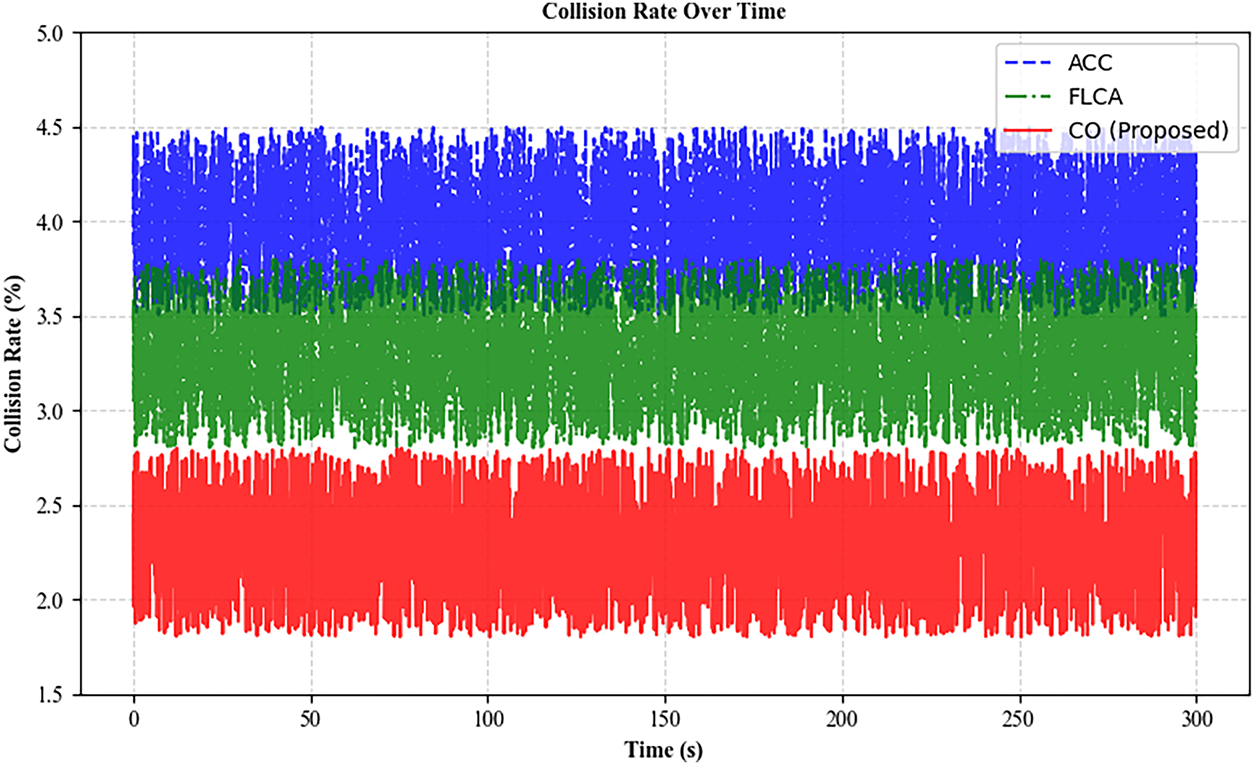
Figure 5: Comparative analysis of collision rate
The term Acceleration smoothness refers to how gradually a vehicle changes its acceleration. It indicates the degree of jerk or abruptness in the vehicle’s motion. Smooth acceleration helps prevent abrupt stops and starts, which leads to better comfort and less wear on the vehicle. In this study, acceleration smoothness is essential to determine how well the system handles real-time acceleration adjustments. A smoother acceleration profile leads to fewer speed fluctuations, improving both driver comfort and system stability. A high acceleration smoothness indicates that the vehicle accelerates gradually without sudden jumps, enhancing comfort and performance. A low smoothness value suggests abrupt changes in acceleration, which will result in jerky movements, discomfort, and reduced fuel efficiency. It is depicted as per Eq. (54).
where Δa is the change in acceleration, and Δt is the time period over which the change occurs. Fig. 6 shows that the Convex Optimization method produced an acceleration smoothness value of 0.3 m/s², the lowest of all the methods. ACC had a smoothness value of 0.7 m/s², and FLCA had a value of 0.5 m/s². This indicates that the convex optimization method ensures more consistent and comfortable acceleration, with fewer abrupt changes in velocity.
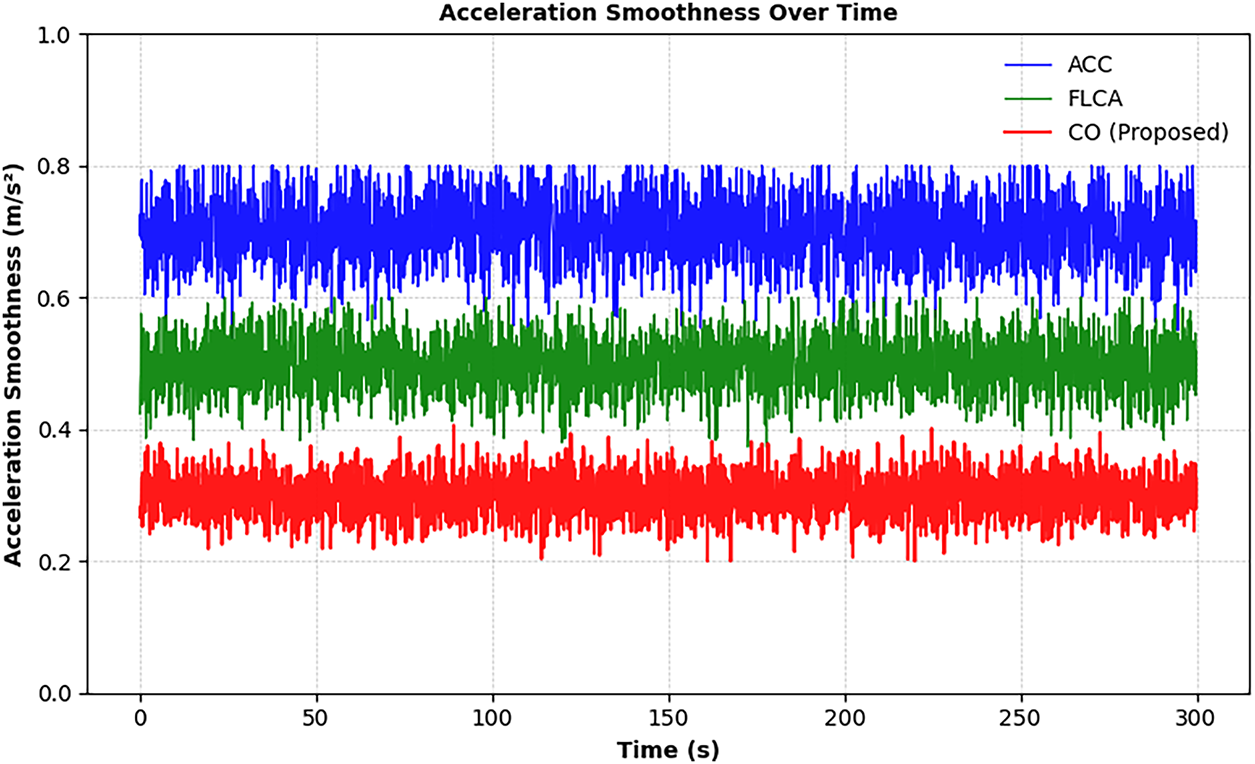
Figure 6: Acceleration smoothness among different vehicles
Fuel efficiency measures the distance a vehicle can travel per unit of fuel consumed, typically expressed in kilometers per liter (km/L). This metric indicates how well the system minimizes fuel consumption while maintaining safe and efficient traffic flow. Fuel efficiency is a key factor in evaluating the overall effectiveness of the proposed acceleration control system. Efficient fuel usage leads to lower emissions and cost savings, which is particularly important in smart vehicle networks where energy consumption can be optimized. A higher fuel efficiency value means the vehicle uses less fuel to travel a given distance, which is ideal for reducing environmental impact. A lower fuel efficiency value suggests that the vehicle consumes more fuel, which is undesirable from an ecological and economic perspective. Mathematically, it is depicted as per Eq. (55).
Fig. 7 defines the comparative analysis and shows that the proposed Convex Optimization method achieved a fuel efficiency of 15.6 km/L, the highest among the three strategies. ACC achieved 13.2 km/L, and FLCA had 14.0 km/L. These results demonstrate that the convex optimization method optimizes acceleration, reducing fuel consumption and higher energy efficiency.
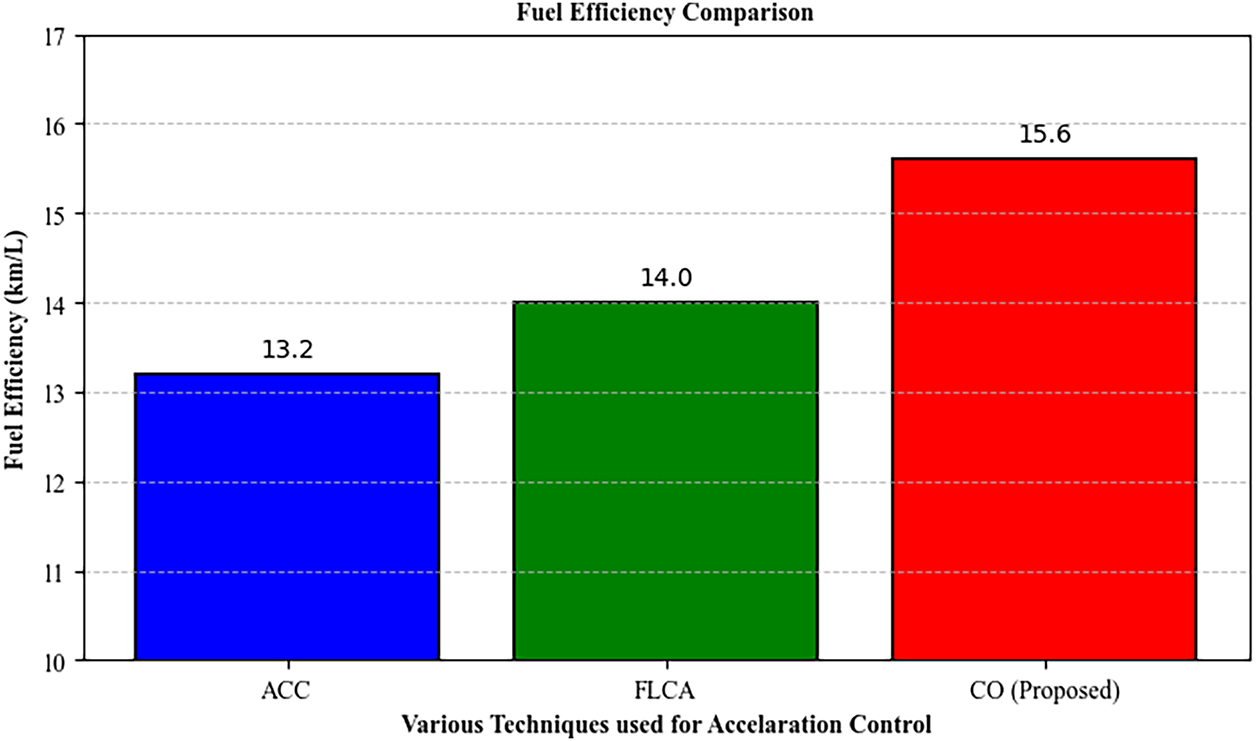
Figure 7: Analysis of fuel efficiency in terms of different models
This performance metric refers to the number of vehicles that pass a given point on the road within a specified time frame. It is usually measured in vehicles per hour (veh/h). A higher traffic throughput indicates that the road network operates efficiently, allowing more vehicles to pass without causing congestion. Traffic throughput is a critical performance metric for this study as it directly reflects how well the proposed acceleration control strategy improves traffic flow. A higher throughput indicates that the vehicles can move more efficiently, reducing congestion and improving road capacity. It also shows a smooth flow of vehicles, with minimal delays or congestion. A low throughput value suggests that the vehicles are stuck in traffic or unable to move efficiently, leading to congestion and delays. It is mathematically described as per Eq. (56) below.
The result analysis is depicted in Fig. 8. It shows that the Convex Optimization method achieved a traffic throughput of 350 veh/h, the highest among the strategies. ACC achieved 290 veh/h, and FLCA had 310 veh/h. These results highlight that the convex optimization method facilitates smoother traffic flow, allowing more vehicles to pass through the simulation area within the same time frame.
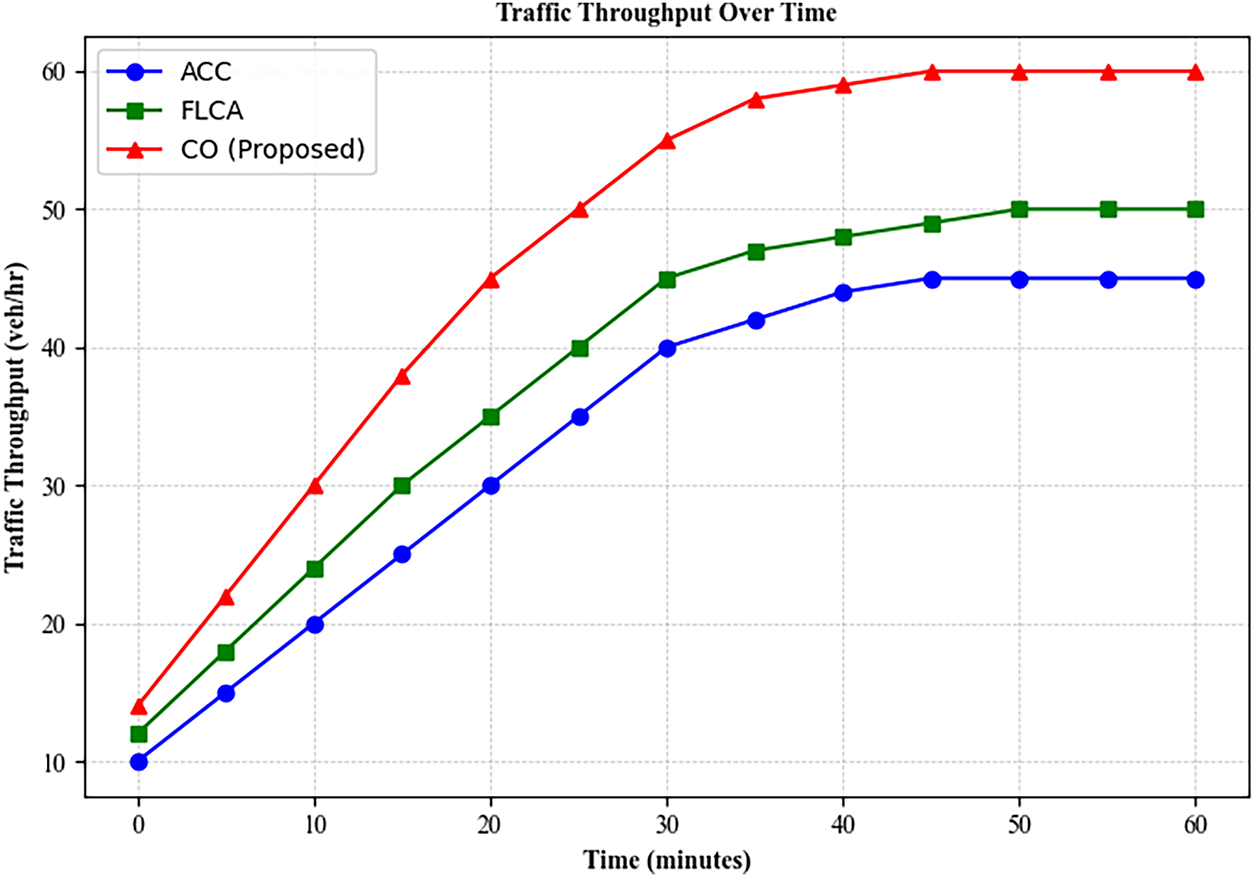
Figure 8: Analysis of traffic throughput in terms of different models
Response time measures the time a vehicle takes to react and adjust its acceleration based on real-time information from neighboring vehicles and RSUs. Lower response times indicate quicker adjustments to changes in traffic conditions, which are essential for avoiding accidents and ensuring safety. This metric is critical for evaluating the responsiveness of the vehicle’s control system. A lower response time means that the system can quickly adapt to changes in traffic or road conditions, leading to improved safety and smoother traffic flow. Lower response time is preferable as it allows the vehicle to react quickly to dynamic changes in traffic, preventing collisions and improving safety. A higher response time indicates delayed reactions, which can lead to accidents or disruptions in traffic flow. Mathematically represented using Eq. (57) below:
The simulation results demonstrated in Fig. 9 show that the Convex Optimization method had the shortest response time of 90 ms, significantly outperforming ACC (130 ms) and FLCA (120 ms). This indicates that the convex optimization method is highly responsive in adjusting acceleration quickly to maintain safe distances and improve traffic flow.
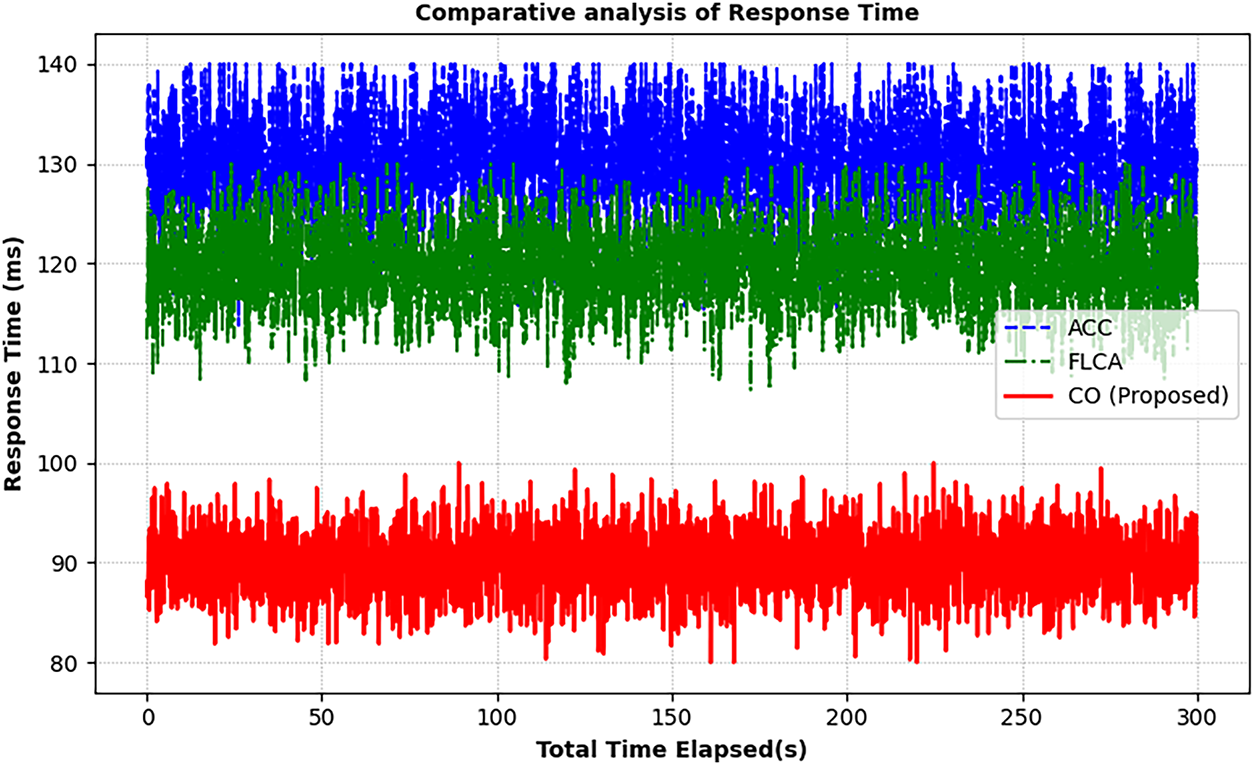
Figure 9: Response time in terms of different models
Table 6 summarizes the quantitative performance of the ACC, FLCA, and the proposed Convex Optimization method across all evaluated metrics.
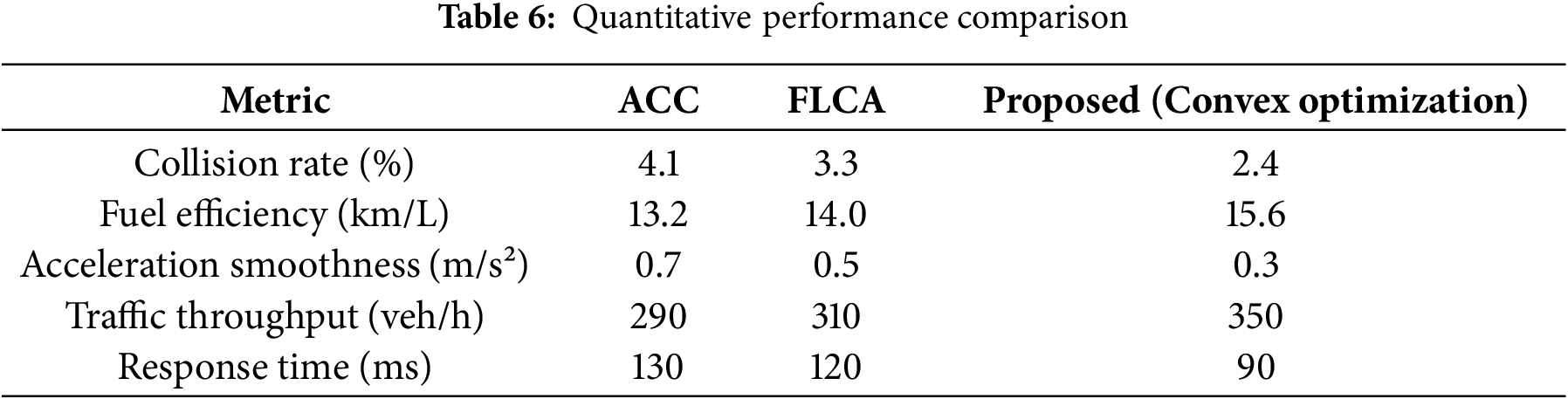
It shows that the proposed method achieves a 40% reduction in collision rate compared to FLCA and a 70% reduction compared to ACC. Ensuring safety is not achieved at the expense of efficiency; instead, it is complemented by an 11% improvement in fuel economy over FLCA and an 18% improvement over ACC, directly translating to lower operational costs and reduced emissions. Additionally, the algorithm’s intelligent control delivers a 40% smoother acceleration profile than FLCA, which significantly improves passenger comfort and vehicle longevity, while its rapid 90 ms response time ensures swift adaptation to changing traffic conditions. Lastly, these synergistic improvements culminate in a 13% higher traffic throughput than FLCA, which shows that the proposed method not only makes vehicles safer and more efficient but also fundamentally enhances the capacity and fluidity of the entire road network.
The graphical analysis described above clearly shows how the proposed method compares to the baseline strategies. It displays the acceleration profiles of various vehicles over time, where it is evident that the convex optimization-based method results in less fluctuation in acceleration compared to both ACC and FLCA, after changing the densities of the area. The results clearly show that ACC struggles with higher densities, leading to frequent braking and increased collisions. FLCA, while more adaptive, still faces challenges in high-speed scenarios. The convex optimization approach, however, efficiently manages traffic density, adjusting acceleration dynamically to ensure optimal safety and maintain safe inter-vehicular distances. The analysis shows that when the proposed model is compared to earlier control approaches, it demonstrates a higher level of adaptability and theoretical rigor. Conventional methods like rule-based and fuzzy logic controllers primarily relied on heuristic decisions without formal optimization, which results in inconsistent performance under varying traffic conditions. Likewise, predictive and model-based control strategies developed in earlier studies focused mainly on centralized coordination or energy minimization in idealized conditions. The current study introduces decentralized convex optimization directly into a VANET-based framework, which allows each vehicle to make autonomous yet cooperative control decisions. Additionally, the unified cost function explicitly minimizes jerk and acceleration energy while maximizing inter-vehicle distance.
From a deployment perspective, the convex optimization module can be implemented within an OBU or executed through RSU-assisted edge nodes. The CVX solver used in simulations demonstrates convergence times below 50 ms, indicating that the model is computationally feasible for real-time applications. Moreover, the communication structure based on IEEE 802.11p ensures stable data exchange between vehicles and roadside units. This method enables cooperative decision-making in distributed environments. The energy-efficient braking and acceleration mechanisms derived from the convex optimization layer also contribute to improved fuel economy and lower emissions, making transportation more sustainable. These findings indicate that the proposed framework can be seamlessly integrated into emerging vehicular architectures and future ITS deployments.
Apart from its promising performance, the current framework assumes ideal communication conditions without considering packet delays, sensor noise, or network congestion. Moreover, the experimental setup is limited to straight highway conditions, avoiding complex scenarios such as intersections or lane changes. Future work will extend the model to include stochastic communication effects, heterogeneous traffic compositions, and real-time uncertainty handling. Hardware-in-the-loop or digital twin–based evaluations will also help validate the system’s real-world feasibility and robustness under practical constraints. These extensions will further strengthen the scalability, sustainability, and reliability of the proposed convex optimization approach for large-scale VANET deployments.
This paper presented a convex optimization–based acceleration control strategy for collision avoidance in VANETs, explicitly integrating RSU-assisted V2V/V2I communication into the control process. By framing the problem as an optimal control formulation and validating it through KKT conditions, the study achieved a solution that minimizes collision risk while also optimizing energy consumption and travel time. The simulation results confirmed that the proposed method outperforms conventional baselines such as ACC and FLCA, which will deliver superior outcomes in safety, efficiency, comfort, responsiveness, and throughput. Notably, the incorporation of energy minimization ensures sustainable operation alongside improved traffic flow, demonstrating practical potential for large-scale VANET deployments. Future work can be extended in several promising directions, such as testing the framework under more complex driving conditions, including cut-ins, emergency braking, and curved roads, while also exploring larger vehicular networks to further validate scalability. While the current study establishes the feasibility of the proposed approach through simulation, it does not incorporate communication delays or sensor noise. Future work will focus on hardware-in-the-loop testing for real-time validation through RSU-assisted edge controllers, which will bridge the gap between simulation and practical deployment in next-generation intelligent transportation systems.
Acknowledgement: The authors would like to thank Princess Nourah bint Abdulrahman University Researchers Supporting Project under grant number (PNURSP2026R751), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Funding Statement: This work was supported by the Princess Nourah bint Abdulrahman University Researchers Supporting Project under grant number (PNURSP2026R751), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Author Contributions: Conceptualization, Awais Ahmad and Syed Atif Moqurrab; methodology, Awais Ahmad; software, Awais Ahmad; validation, Awais Ahmad, Fakhri Alam Khan and Gautam Srivastava; formal analysis, Syed Atif Moqurrab; investigation, Awais Ahmad; resources, Fakhri Alam Khan and Dina S. M. Hassan; data curation, Awais Ahmad; writing—original draft preparation, Awais Ahmad; writing—review and editing, Syed Atif Moqurrab, Awais Ahmad and Abdul Razaque; visualization, Awais Ahmad; supervision, Syed Atif Moqurrab and Dina S. M. Hassan; project administration, Syed Atif Moqurrab; funding acquisition, Dina S. M. Hassan. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data used in this study were generated through simulation using MATLAB and the CVX optimization toolbox. All simulation parameters, algorithms, and model configurations required to reproduce the results are fully described within the manuscript. The simulation scripts and related materials are available from the corresponding author upon reasonable request. No external or proprietary datasets were used, and therefore no restrictions apply.
Ethics Approval: This study does not involve human participants, animals, or any sensitive personal data. Therefore, ethical approval was not required.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Mishra P, Singh G. Internet of vehicles for sustainable smart cities: opportunities, issues, and challenges. Smart Cities. 2025;8(3):93. doi:10.3390/smartcities8030093. [Google Scholar] [CrossRef]
2. José Salcedo Parra O, Correa Sánchez L, Gómez J. The evolution of VANET: a review of emerging trends in artificial intelligence and software-defined networks. IEEE Access. 2025;13(3):49187–213. doi:10.1109/access.2025.3548640. [Google Scholar] [CrossRef]
3. Cheng Z, Zhu J, Feng Z, Yang M, Zhang W, Chen J. Driving safety risk analysis and assessment in a mixed driving environment of connected and non-connected vehicles: a systematic survey. IEEE Trans Intell Transp Syst. 2025;26(5):5747–81. doi:10.1109/TITS.2025.3526820. [Google Scholar] [CrossRef]
4. Dutta A, Samaniego Campoverde LM, Tropea M, De Rango F. A comprehensive review of recent developments in VANET for traffic, safety & remote monitoring applications. J Netw Syst Manag. 2024;32(4):73. doi:10.1007/s10922-024-09853-5. [Google Scholar] [CrossRef]
5. Sumit, Chhillar RS, Dalal S, Dalal S, Lilhore UK, Samiya S. A dynamic and optimized routing approach for VANET communication in smart cities to secure intelligent transportation system via a chaotic multi-verse optimization algorithm. Clust Comput. 2024;27(5):7023–48. doi:10.1007/s10586-024-04322-9. [Google Scholar] [CrossRef]
6. Okello K, Mwangi E, El-Malek AHA. Connectivity analysis in VANETS with dynamic ranges. Telecom. 2025;6(2):33. doi:10.3390/telecom6020033. [Google Scholar] [CrossRef]
7. Gorospe J, Hasan S, Gómez AA, Uhlemann E. Toward resilient CACC systems for automated vehicles. IEEE Open J Intell Transp Syst. 2025;6:276–93. doi:10.1109/ojits.2025.3544374. [Google Scholar] [CrossRef]
8. Chen J, Wei H, Zhang H, Shi Y. Asynchronous self-triggered stochastic distributed MPC for cooperative vehicle platooning over vehicular ad-hoc networks. IEEE Trans Veh Technol. 2023;72(11):14061–73. doi:10.1109/TVT.2023.3288210. [Google Scholar] [CrossRef]
9. Rastgar F, Masnavi H, Shrestha J, Kruusamäe K, Aabloo A, Singh AK. GPU accelerated convex approximations for fast multi-agent trajectory optimization. IEEE Robot Autom Lett. 2021;6(2):3303–10. doi:10.1109/lra.2021.3061398. [Google Scholar] [CrossRef]
10. Jiang J. Energy-efficient mechanisms for sustainable operations in vehicular fog networks: challenges, state-of-the-art, and future directions. Int J Commun Syst. 2024;37(16):e5913. doi:10.1002/dac.5913. [Google Scholar] [CrossRef]
11. Yin L, Luo J, Qiu C, Wang C, Qiao Y. Joint task offloading and resources allocation for hybrid vehicle edge computing systems. IEEE Trans Intell Transp Syst. 2024;25(8):10355–68. doi:10.1109/TITS.2024.3351635. [Google Scholar] [CrossRef]
12. Wang Z. A survey on convex optimization for guidance and control of vehicular systems. Annu Rev Control. 2024;57(1):100957. doi:10.1016/j.arcontrol.2024.100957. [Google Scholar] [CrossRef]
13. Zhang Y, Lin Y, Qin Y, Dong M, Gao L, Hashemi E. A new adaptive cruise control considering crash avoidance for intelligent vehicle. IEEE Trans Ind Electron. 2024;71(1):688–96. doi:10.1109/TIE.2023.3239878. [Google Scholar] [CrossRef]
14. García-Escalante AR, Fuentes-Aguilar RQ, Palma-Zubia A, Morales-Vargas E. Automatic brake driver assistance system based on deep learning and fuzzy logic. PLoS One. 2024;19(12):e0308858. doi:10.1371/journal.pone.0308858. [Google Scholar] [PubMed] [CrossRef]
15. Chen H, Zhang F, Aksun-Guvenc B. Collision avoidance in autonomous vehicles using the control Lyapunov function-control barrier function-quadratic programming approach with deep reinforcement learning decision-making. Electronics. 2025;14(3):557. doi:10.3390/electronics14030557. [Google Scholar] [CrossRef]
16. Shan L, Yan P, Feng H, Chen X. Pursuit-evasion game theoretic decision making for collision avoidance in automated vehicles. Dyn Games Appl. 2025:1–21. doi:10.1007/s13235-025-00622-w. [Google Scholar] [CrossRef]
17. Rosen HE, Bari I, Paichadze N, Peden M, Khayesi M, Monclús J, et al. Global road safety 2010–18: an analysis of global status reports. Injury. 2025;56(6):110266. doi:10.1016/j.injury.2022.07.030. [Google Scholar] [PubMed] [CrossRef]
18. Farhat W, Ben Rhaiem O, Faiedh H, Souani C. A novel cooperative collision avoidance system for vehicular communication based on deep learning. Int J Inf Technol. 2024;16(3):1661–75. doi:10.1007/s41870-023-01574-3. [Google Scholar] [CrossRef]
19. Djenouri Y, Belbachir AN, Michalak T, Belhadi A, Srivastava G. Enhancing smart road safety with federated learning for near crash detection to advance the development of the internet of vehicles. Eng Appl Artif Intell. 2024;133(10):108350. doi:10.1016/j.engappai.2024.108350. [Google Scholar] [CrossRef]
20. Adnan I, Umer T, Arsalan A, Al Dabel MM, Bashir AK, Ansif A. Data driven vehicular heterogeneity based intelligent collision avoidance system for internet of vehicles (IoV). Digit Commun Netw. 2025. doi:10.1016/j.dcan.2025.03.010. [Google Scholar] [CrossRef]
21. Vijayan D, Saad M, Khedr AM. Bayesian optimized enhanced ensemble multi-layer perceptron for rear-end collision prediction in IoV. IEEE Access. 2024;12:193693–706. doi:10.1109/access.2024.3519177. [Google Scholar] [CrossRef]
22. Yang Q, Yoo SJ. Hierarchical reinforcement learning-based routing algorithm with grouped RSU in urban VANETs. IEEE Trans Intell Transp Syst. 2024;25(8):10131–46. doi:10.1109/TITS.2024.3353258. [Google Scholar] [CrossRef]
23. Alam I, Manjul M, Pathak V, Mala V, Mangal A, Thakur HK, et al. Efficient and secure graph-based trust-enabled routing in vehicular ad-hoc networks. Mob Netw Appl. 2024;29(6):1732–52. doi:10.1007/s11036-023-02274-9. [Google Scholar] [CrossRef]
24. Hota L, Nayak BP, Kumar A, Sahoo B, Ali GGMN. A performance analysis of VANETs propagation models and routing protocols. Sustainability. 2022;14(3):1379. doi:10.3390/su14031379. [Google Scholar] [CrossRef]
25. Wan N, Luo Y, Zeng G, Zhou X. Minimization of VANET execution time based on joint task offloading and resource allocation. Peer Peer Netw Appl. 2023;16(1):71–86. doi:10.1007/s12083-022-01385-6. [Google Scholar] [CrossRef]
26. Zhou J, Tian D, Sheng Z, Duan X, Qu G, Zhao D, et al. Robust Min-max model predictive vehicle platooning with causal disturbance feedback. IEEE Trans Intell Transp Syst. 2022;23(9):15878–97. doi:10.1109/TITS.2022.3146149. [Google Scholar] [CrossRef]
27. Jia Y, Jibrin R, Görges D. Energy-optimal adaptive cruise control for electric vehicles based on linear and nonlinear model predictive control. IEEE Trans Veh Technol. 2020;69(12):14173–87. doi:10.1109/TVT.2020.3044265. [Google Scholar] [CrossRef]
28. Shen M, Dollar RA, Molnar TG, He CR, Vahidi A, Orosz G. Energy-efficient reactive and predictive connected cruise control. IEEE Trans Intell Veh. 2024;9(1):944–57. doi:10.1109/TIV.2023.3281763. [Google Scholar] [CrossRef]
29. Gong X, Wang B, Liang S. Collision-free cooperative motion planning and decision-making for connected and automated vehicles at unsignalized intersections. IEEE Trans Syst Man Cybern Syst. 2024;54(5):2744–56. doi:10.1109/TSMC.2023.3346275. [Google Scholar] [CrossRef]
30. Visconti P, Rausa G, Del-Valle-Soto C, Velázquez R, Cafagna D, De Fazio R. Innovative driver monitoring systems and on-board-vehicle devices in a smart-road scenario based on the Internet of vehicle paradigm: a literature and commercial solutions overview. Sensors. 2025;25(2):562. doi:10.3390/s25020562. [Google Scholar] [PubMed] [CrossRef]
31. ElSamadisy O, Shi T, Smirnov I, Abdulhai B. Safe, efficient, and comfortable reinforcement-learning-based car-following for AVs with an analytic safety guarantee and dynamic target speed. Transp Res Rec J Transp Res Board. 2024;2678(1):643–61. doi:10.1177/03611981231171899. [Google Scholar] [CrossRef]
32. Yin J, Hwang SH. Adaptive speed control scheme based on congestion level and inter-vehicle distance. Electronics. 2024;13(13):2678. doi:10.3390/electronics13132678. [Google Scholar] [CrossRef]
33. Li Z, Liu Y, Shen Z. Safety-critical control of connected vehicle systems based on barrier functions. IEEE Trans Intell Transp Syst. 2025;26(11):18978–91. doi:10.1109/TITS.2025.3590263. [Google Scholar] [CrossRef]
34. Nahar A, Mondal KK, Das D, Buyya R. Clouds on the road: a software-defined fog computing framework for intelligent resource management in vehicular ad-hoc networks. IEEE Trans Mob Comput. 2024;23(12):12778–92. doi:10.1109/TMC.2024.3419016. [Google Scholar] [CrossRef]
35. Jin X, Lv H, Tao Y, Lu J, Lv J, Opinat Ikiela NV. Active fault tolerant trajectory-tracking control of autonomous distributed-drive electric vehicles considering steer-by-wire failure. Symmetry. 2025;17(9):1471. doi:10.3390/sym17091471. [Google Scholar] [CrossRef]
36. Pei J, Li J, Song Z, Al Dabel MM, Alenazi MJF, Zhang S, et al. Neuro-VAE-symbolic dynamic traffic management. IEEE Trans Intell Transp Syst. 2025:1–10. doi:10.1109/TITS.2025.3571210. [Google Scholar] [CrossRef]
37. Pei J, Omar M, Al Dabel MM, Mumtaz S, Liu W. Federated few-shot learning with intelligent transportation cross-regional adaptation. IEEE Trans Intell Transp Syst. 2025:1–10. doi:10.1109/TITS.2025.3563928. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools