
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Prediction of SMA Hysteresis Behavior: A Deep Learning Approach with Explainable AI
1 Department of Artificial Intelligence Systems and Data Analysis, Ternopil Ivan Puluj National Technical University, Ternopil, Ukraine
2 Department of Computer-Integrated Technologies, Ternopil Ivan Puluj National Technical University, Ternopil, Ukraine
3 Department of Automation of Technological Processes and Production, Ternopil Ivan Puluj National Technical University, Ternopil, Ukraine
4 Université Clermont Auvergne, CNRS, Clermont Auvergne INP, Institut Pascal, Clermont-Ferrand, France
* Corresponding Authors: Dmytro Tymoshchuk. Email: ; Pavlo Maruschak. Email:
(This article belongs to the Special Issue: Machine Learning in the Mechanics of Materials and Structures)
Computers, Materials & Continua 2026, 87(3), 24 https://doi.org/10.32604/cmc.2026.077062
Received 01 December 2025; Accepted 22 January 2026; Issue published 09 April 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This article presents an approach to predicting the hysteresis behavior of shape memory alloys (SMAs) using a Temporal Convolutional Network (TCN) deep learning model, followed by the interpretation of the results using Explainable Artificial Intelligence (XAI) methods. The experimental dataset was prepared based on cyclic loading tests of nickel-titanium wire at loading frequencies of 0.3, 0.5, 1, 3, and 5 Hz. For training, validation, and testing, 100–250 loading-unloading cycles were used. The input features of the models were stress σ (MPa), cycle number (Cycle parameter), and loading-unloading stage indicator, while the output variable was strain ε (%). The data were divided into groups based on the cycle number, ensuring no overlap between samples and correctly assessing the model’s generalization ability. TCN network hyperparameters are optimized using the Hyperband algorithm. The model’s accuracy was evaluated using mean squared error (MSE), mean absolute error (MAE), mean absolute percentage error (MAPE), and the coefficient of determination (R2). On the test dataset, the models achieved MSE ≤ 0.0002, MAE ≤ 0.0055, MAPE ≤ 0.0038, and R2 ≥ 0.9997, confirming the high accuracy of reproducing the stress-strain loop shape. The extrapolation ability was evaluated on additional cycles not used during training. For a frequency of 1 Hz, the following results were obtained: for cycle 260, MSE = 0.0001, MAE = 0.0081, MAPE = 0.0032, R2 = 0.9997; for cycle 350, MSE = 0.0004, MAE = 0.0178, MAPE = 0.0073, R2 = 0.9989, for cycle 450 MSE = 0.0017, MAE = 0.0315, MAPE = 0.0124, R2 = 0.9964. This dynamic reflects a physically justified increase in errors with increasing cycle number, due to the accumulation of functional fatigue effects. To interpret the model’s performance, the SHapley Additive exPlanations (SHAP) method was used, which made it possible to quantitatively assess the contributions of input features to the prediction. Stress is the dominant factor, and the significance of the Cycle parameter increases with increasing cycle distance, s consistent with the evolution of the hysteresis loop under the influence of functional fatigue of the material.Keywords
Shape memory alloys (SMAs) belong to a class of materials capable of restoring their shape after deformation due to unique phase transformations in their crystal structure [1]. SMAs exhibit two properties that determine their unique functional characteristics: shape memory effect and superelasticity. The shape memory effect consists in the restoration of the initial shape of the material when heated after deformation in the martensitic state, while superelasticity manifests itself in the alloy’s ability to elastically absorb significant deformations without residual changes under mechanical stress. In the case of superelasticity, the transition to martensite occurs under stress at a temperature above that at which the austenitic transformation is complete [2]. Nickel-titanium alloys (NiTi) are the most widely researched and used SMAs, due to their combination of functional properties, high strength, plasticity, and corrosion resistance. Such alloys can withstand multi-cycle mechanical loads while retaining the ability to restore their original shape even after significant deformation. The combination of unique properties makes NiTi and other SMAs important for engineering applications. NiTi alloys are successfully utilized in aviation technology, as noted by the authors of the article [3], to create intelligent drives, aerodynamic surface control systems, and adaptive aircraft structures that can change shape in response to temperature or load. The authors demonstrate that SMAs are applied in hydraulic systems, morphing deformed wings, and variable nozzles of aircraft engines, thereby confirming the practical feasibility of the concept of self-adaptive aircraft structures. Study [4] is aimed at the development and experimental testing of an innovative bilateral SMA actuator for adaptive ‘smart’ wings, capable of providing precise bidirectional control of the wing surface. The authors emphasize that the proposed antagonistic spring design based on SMA offers low weight, high specific power, and the potential for integration into additively manufactured prototypes, making it promising for the development of morphing aviation systems. As shown in [5], SMAs are used in the automotive industry to develop adaptive noise-insulation systems, particularly in the form of SMA drives integrated into the door seal cavity. The proposed mechanism, based on heating SMA with a wire due to the Joule effect, ensured controlled expansion of the sealing system and confirmed its effectiveness through experimental validation, as well as a significant improvement in acoustic insulation during laboratory and bench tests. In the paper [6], the use of SMAs as bistable actuators for morphing spoilers was demonstrated, enabling fast, accurate switching between two stable positions of aerodynamic surfaces. The developed SMA technology enables the optimization of downforce and aerodynamic drag, significantly enhancing vehicle efficiency and dynamic performance, underscoring the promise of NiTi as an innovative solution for adaptive automotive aerodynamics. In the study [7], a highly productive modular SMA actuator for medical robotics was proposed, combining rapid heating with a nichrome wire and active air cooling to significantly broaden the actuator’s frequency band. The developed design offers a large working stroke, high control accuracy, and repeatability, while the compact modular format facilitates integration into robotic surgical systems, demonstrating the promise of SMA drives in real-world medical applications. The authors [8] have systematized the key achievements of the last decade in the field of robotic systems using SMAs actuators. The authors emphasize that thanks to properties such as high drive force, shape memory effect, and superelasticity, SMA enable the creation of compact, flexible, and multifunctional robotic systems, including soft robots, artificial muscles, and other drive mechanisms. In the field of biomedicine, the authors [9] provide an overview of technologies for manufacturing micromechanical actuators based on SMAs, including thin-film and bulk microstructures created using microelectromechanical systems techniques. The authors highlight key characteristics, phase transition temperatures, and control methods, and demonstrate the promise of SMA microactuators for biomedical applications, particularly in microgrippers and micropumps. The authors of the article [10] summarize current achievements in the field of additive manufacturing of SMAs, particularly NiTi, for biomedical applications. The authors emphasize that laser powder bed fusion (LPBF) technology enables the production of highly uniform, geometrically complex NiTi structures with properties that meet American Society for Testing and Materials (ASTM) standards. In civil engineering, the authors [11] conducted a thermomechanical characterization of NiTi shape memory alloy wires for civil engineering applications, specifically analyzing their behavior under direct tension at variable temperatures under fixed stress, and their ability to form and maintain recovery stresses. The results showed significant deformations of direct martensitic transformation (5%–11%) during cooling under constant stress, which can be critical for structures. However, NiTi alloys demonstrated high potential for re-centering systems and, in the case of austenitic alloys, for long-term pre-stressing.
Despite their exceptional functional properties, the nonlinear mechanical behavior of SMAs complicates their modelling and prediction of characteristics. Hysteresis associated with phase transformations, i.e., the difference between the paths of direct (austenite-martensite) and reverse (martensite-austenite) transformations, leads to the nonlinearity of the stress-strain characteristics of the alloy and the formation of a hysteresis loop, which determines the energy losses during cyclic loading (Fig. 1).
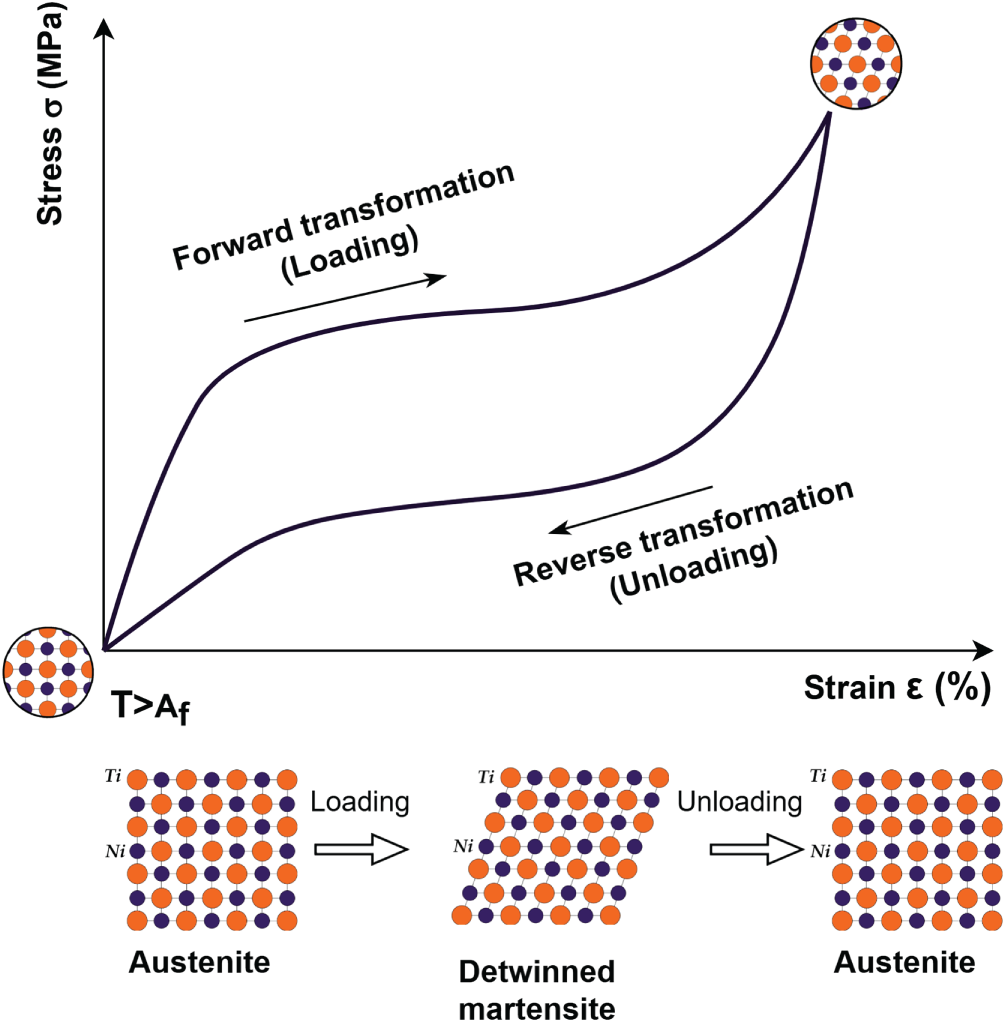
Figure 1: Stress–strain hysteresis loop of SMA with atomic structures of martensite and austenite.
Due to these characteristics, traditional methods of numerical analysis of SMA behavior remain complex and computationally expensive. Building a universal model capable of adequately reproducing the nonlinear hysteresis behavior of SMA over a wide range of conditions remains a challenging task. Numerical modelling methods, such as finite element analysis (FEM), require very small loading steps and a fine mesh to capture steep stress gradients and phase boundaries, resulting in significant computational time [12]. Thus, there is a need for new approaches to SMA modelling which combine high accuracy with computational efficiency.
Machine learning (ML) methods bring new opportunities for modeling SMA behavior. ML algorithms enable the identification of complex nonlinear patterns in large experimental datasets without the need to explicitly formulate physical equations. This enables the creation of models capable of predicting the behavior of materials under various loading conditions, compositions, or heat treatments. The advantage of ML is its effective performance on high-dimensional, nonlinear problems, where traditional methods struggle.
Several studies have demonstrated the high efficiency of ML methods in predicting and modeling the properties of SMAs. Neural networks, particularly multilayer perceptron (MLP) and recurrent neural network (RNN), capable of approximating the complex nonlinear dependencies characteristic of SMA hysteresis behavior, have become the most widespread. In [13], an long short-term memory (LSTM) neural network was successfully used to model the properties of SMA and reproduce nonlinear dependencies during cyclic loading. The study [14] demonstrated the capabilities of ML algorithms to classify the loading frequency of SMAs using experimental data, highlighting the potential of artificial intelligence to analyze the dynamic behavior of such materials. In [15], the authors demonstrated the use of ML methods to accelerate the design of NiTi alloys with enhanced elastocaloric effects. Training, implemented in several iterations, yielded nine new NiTi alloy compositions with high entropy change values. The interpreted ML model revealed key relationships between material composition and functional characteristics, providing an effective approach to creating high-performance elastocaloric materials. In [16], a ML-based approach is presented for predicting the completion temperature of austenitic transformation in four-component NiTiHfPd alloys based on limited experimental data. The authors built an expanded database of composition and heat-treatment parameters, used several ML algorithms to model phase transformation temperatures, and confirmed their accuracy by comparing the results with experimental data. In study [17], a combined approach of Extreme Gradient Boosting (XGBoost) and Density Functional Theory (DFT) calculations was used to screen NiTi-based SMAs with narrow thermal hysteresis, which is a critical parameter for elastocaloric and high-efficiency actuator applications. In [18], an explainable ML model was developed to predict narrow thermal hysteresis in high-temperature NiTi SMAs using a compact experimental dataset and twelve ML algorithms. The XGBoost model demonstrated the highest accuracy (R2 = 0.893), and the use of SHapley Additive exPlanations (SHAP), Accumulated Local Effects (ALE), and feature importance analysis ensured the interpretability of the predictions, allowing for the establishment of key dependencies between the chemical composition of the alloys and the magnitude of their thermal hysteresis. Study [19] implemented an adaptive design strategy that combines ML with theoretical calculations to accelerate the search for multicomponent SMAs based on Cu and Al with enhanced elastocaloric effects. In study [20], ML methods were used to optimize the elastocaloric properties of Ni- and Mn-based SMAs, to predict adiabatic temperature changes, and analyze the phase transformation mechanism. In [21], ML methods were employed to identify high-temperature NiTiHf alloys suitable for actuators in space systems, particularly CubeSats. A comparison of seven ML models showed that the k-nearest neighbors algorithm achieved the highest accuracy, enabling the identification of new alloys with target transformation temperatures, thermal hysteresis, and working outputs, and demonstrating the high sensitivity of the Ms temperature to changes in Ni content with increasing Hf concentration. In a study [22], ML models were developed to predict the mechanical properties of nickel-free shape memory β-titanium alloys, specifically ultimate strength and relative elongation, based on a combination of literature and experimental data. The highest accuracy was achieved by the Gradient Boosting Regression model R2 = 0.817, and it was also shown that the integration of features reflecting phase stability significantly improves the accuracy and reliability of prediction with limited data sets. In study [23], an ensemble ML approach was implemented to predict the temperature-induced properties of high-temperature shape memory alloys based on Ti, including the average temperatures of the martensitic Mm and austenitic Am transformations, as well as the thermal hysteresis Tth. The models revealed that the most informative features are those related to composition and material descriptors. The analysis of the importance of structural, thermodynamic, and electronic parameters enabled us to identify the key factors influencing phase transformations in high-temperature shape memory alloys (HTSMAs), providing valuable guidelines for the rational design of alloys. In [24], machine learning and high-performance ab initio calculations were used to develop a generalized empirical formula for determining the martensitic transformation temperature TM in a wide class of SMAs. In the study [25], an interpreted ML workflow was developed to predict the peak martensitic transformation temperature (Tp) in high-entropy TiZrHfNiCoCu alloys, encompassing data set construction, feature selection, modeling, and validation. The ML model provided high accuracy, with an error of <3% for newly synthesized alloys, and SHAP analysis revealed key descriptors, in particular Allred–Rochow electronegativity (CV22), and showed the influence of Co (9–10 mol%) and Cu (15–17 mol%) content on the increase in Tp, which provides valuable guidelines for high-entropy shape memory alloys (HESMAs) compositional design. Study [26] presents a physics-informed ML approach for predicting the martensitic transformation temperature (Ms) in high-entropy NiTi-type alloys, using an Extremely Randomized Trees regressor with alloy composition and physically based material descriptors as input. The use of descriptors provided significantly higher accuracy, mean absolute error (MAE) < 30°C for alloys with ≤4 elements, and validation on six experimentally manufactured HESMA alloys with target Ms > 400°C demonstrated the practical applicability of the proposed approach. In [27], ML methods were used for rapid prediction of the martensitic transformation temperature Ms in NiTi shape memory alloys, where the highest accuracy was achieved by the gradient boosting algorithm R2 = 0.92, MAE = 23.42°C. The use of SHAP analysis enabled the identification of key structural and compositional features, and the concept of high-entropy alloys contributed to the design of the composition Ti19Zr19Hf19Ni37Cu6, which has a Ms above 400°C, significantly expanding the possibilities for high-temperature applications of SMA. The study [28] proposes a comprehensive ML approach for predicting actuation strain in four-component NiTiHfX alloys, considering a wide range of parameters, including chemical composition, manufacturing technology, heat treatment, and applied stress. Based on a large-scale dataset comprising 901 datasets and 17,119 points, a generalized neural network model with high accuracy (R2 = 0.96) was developed, offering opportunities to intelligently select composition and processing modes to maximize the actuation properties of NiTiHfX alloys. In the paper [29], the authors present the experimental characteristics of two new NiTiHf shape memory alloys, whose compositions were optimized using a multilayer neural network to achieve an austenite transformation completion temperature (Af) above 400°C. The manufactured alloys Ni49.7Ti26.6Hf23.7 and Ni50Ti27Hf23 exhibited stable, reversible martensitic transformations, and experimental validation confirmed the predicted Af values, demonstrating the effectiveness of combining ML design with innovative experimental verification methods in creating high-temperature SMAs. In the paper [30], there was employed a physics-informed ML approach for predicting and designing SMAs in a high-dimensional space “alloy—process—properties”, where the combination of chemical descriptors with new heat treatment features, formed based on thermodynamic and kinetic laws of phase transformations, significantly improved the accuracy of the models. The proposed ML approach successfully reproduced the dependencies that determine the temperatures of phase transformations and the width of thermal hysteresis in complex microstructural SMAs, demonstrating the model’s ability to work with physically complex systems that are difficult to describe using traditional modelling methods. At the same time, the physical mechanisms underlying such behaviour, in particular functional fatigue, microstructural evolution, and the stability of martensitic transformations in NiTi alloys, have been studied in detail in fundamental works on cyclic thermomechanical loading. These studies form a reliable materials science basis for the further development and justification of machine learning-based approaches to modelling the complex behaviour of SMA [31,32].
Despite significant advantages, the application of ML methods in SMA research is constrained by several limitations. One key problem is the lack of high-quality, representative experimental data for training models [33]. Obtaining large data sets on the thermomechanical behavior of SMA under a wide range of conditions requires complex, lengthy, and standardized experiments. As a result, many published models are based on relatively small data sets, which reduces their generalizability. An additional complexity is the limited interpretability of most AI approaches. Neural networks often operate on a ‘black box’ principle, making it difficult to identify the physical factors that determine the alloy’s behavior. This stimulates the development of hybrid models that combine ML with physically grounded knowledge of materials, as well as the use of modern interpretability methods (SHAP, Local Interpretable Model-agnostic Explanations (LIME), etc.) to determine the role of individual input parameters in shaping predictions. In this context, a promising direction is the development of physically informed recurrent neural networks with minimal state space. In particular, study [34] proposes an extended minimum state cell (EMSC) that provides a self-consistent, computationally stable prediction of the stress-strain state for rate- and temperature-dependent materials, combining high accuracy with the preservation of the model’s physical interpretability. Since recurrent neural networks have limitations in modelling long-term dependencies, a promising direction is the application of deep learning based on Temporal Convolutional Networks (TCN), which provides more stable and efficient predictions. Despite these difficulties, the advantages of using ML methods in the study of SMAs are significant. Artificial neural networks and other ML algorithms have already demonstrated high efficiency in modelling SMA properties, often surpassing traditional numerical approaches in terms of speed and prediction accuracy [35–37]. The continued accumulation of experimental data and the development of deep learning methods open new perspectives for this field. In particular, the increase in the volume of available data, combined with modern DL architectures, can significantly improve model accuracy and expand their capabilities to account for complex multiphase transformations and non-standard loading modes. In general, integrating mechanical patterns and artificial intelligence methods establishes a new paradigm for modelling SMAs, providing a deeper understanding of their behavior and accelerating the design of materials with specified properties.
The aim of this study is to develop a deep learning model based on TCN to predict the hysteresis behavior of SMAs under cyclic loading and to evaluate its extrapolation capability. A separate component of the study is to explain the results obtained using Explainable Artificial Intelligence methods.
In this article, a comprehensive approach is proposed for predicting the hysteresis behavior of SMAs combining the construction of a deep learning model, hyperparameter optimization, and an accuracy assessment. The final stage of the workflow involves interpreting the model’s performance using Explainable AI (XAI) tools. A general block diagram of the proposed method is shown in Fig. 2.
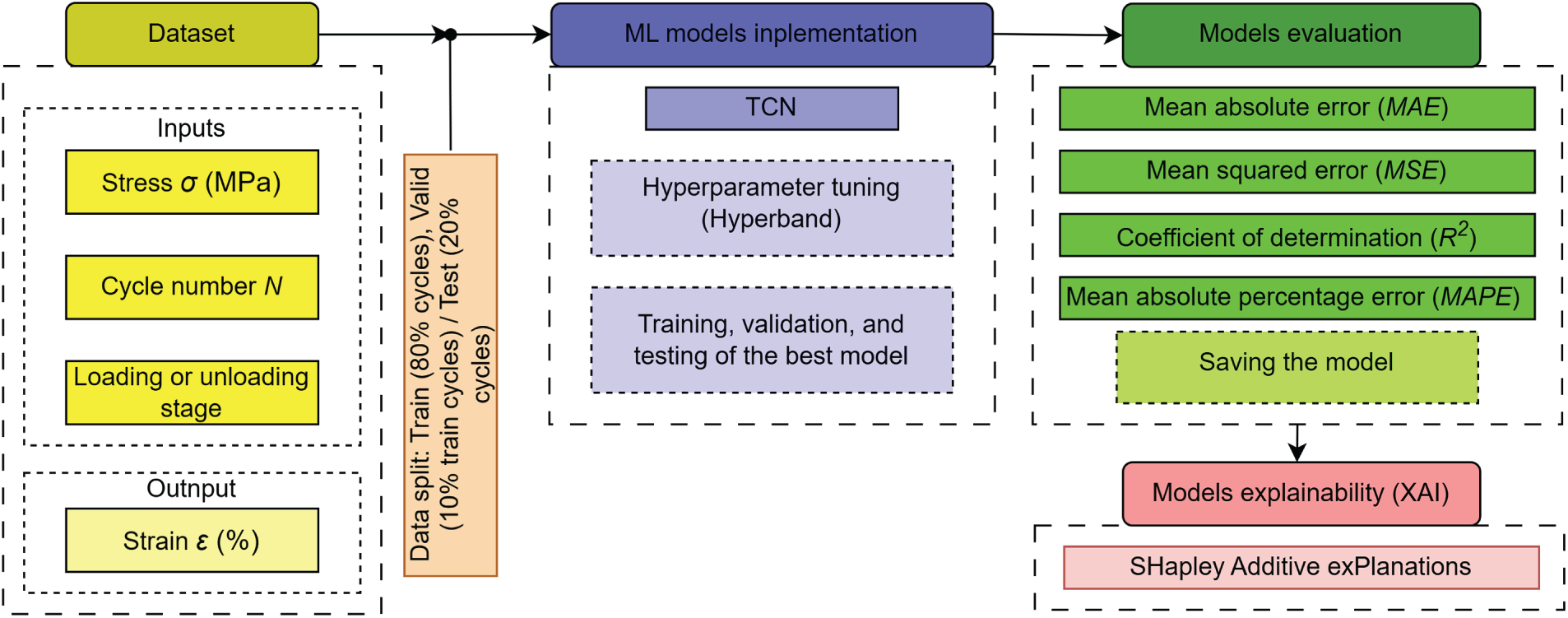
Figure 2: Overall workflow of the proposed SMA hysteresis prediction framework.
2.1 Experimental Setup and Dataset
The experimental data were obtained during cyclic tests of nickel-titanium shape memory alloy wire. The test samples were 1.5 mm-diameter wires, 210 mm long, supplied by Wuxi Xin Xin Glai Steel Trade Co. According to the manufacturer’s technical certificate, the alloy had a chemical composition of 55.78% Ni and 44.12% Ti, with a total impurity content (Co, Cu, Cr, Fe, Nb, C, H, O, N) not exceeding 0.04%. In the austenitic state, the elastic modulus of nitinol was EA = 52.7 GPa [38]. The onset of the direct austenite-martensite phase transformation occurred at a stress of σAM = 338 MPa.
The studies were conducted at room temperature using a STM-100 servo-hydraulic testing machine (Fig. 3a), which provides high-precision control of load and displacement during tests. During the test, the test specimen was rigidly fixed in the grips of the testing machine (Fig. 3b).
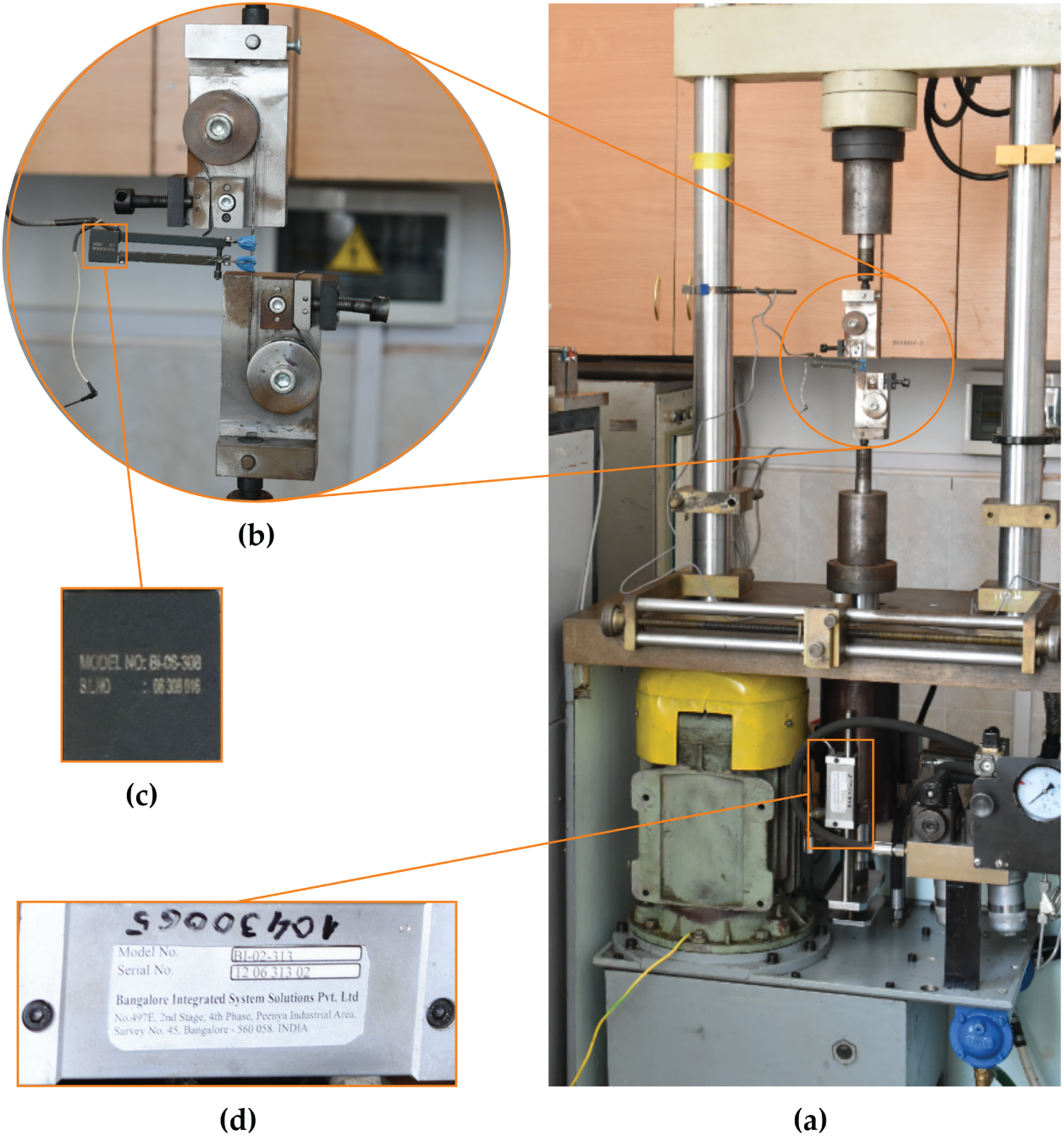
Figure 3: Equipment used in the experiment: (a) general view of the STM-100 testing machine; (b) test sample fixed in the grippers; (c) Bi-06-308 extensometer; (d) Bi-02-313 displacement sensor.
Single-axis tests were performed in sinusoidal cyclic loading mode with stress control (stress-controlled mode). The tests were performed at several loading frequencies ranging from 0.3 to 5 Hz, allowing evaluation of the effect of frequency on the behavior of the NiTi alloy under low-cycle fatigue [39,40]. All experiments were performed with a constant cycle asymmetry coefficient Rσ = 0.1. During the tests, the applied load, rod displacement, and longitudinal deformation (elongation) of the sample were recorded in real time. Elongation was recorded using a Bi-06-308 extensometer (Fig. 3c), and displacement was recorded using a Bi-02-313 inductive sensor (Fig. 3d). The maximum error of both measuring instruments did not exceed 0.1%. The stress and strain values were calculated from force-elongation data obtained with the Test Builder software package, which is integrated with the STM-100 system. This enabled processing signals and correctly constructing σ-ε curves for further analysis of the material’s cyclic behavior.
The experimental equipment used ensured accurate measurement data, which were used to further predict SMA hysteresis behavior. Based on this experimental data, a training dataset was created for ML models.
The input data included parameters such as:
• stress σ (MPa);
• cycle number (Cycle);
• indicator of the stage of loading or unloading of the material (UpDown).
The output feature was the longitudinal strain ε (%) of the material, which reflects the nonlinear mechanical response of the NiTi alloy during phase transformations at loading frequencies f (0.3, 0.5, 1, 3, and 5 Hz).
This study experimentally obtained data from cyclic tests of SMA in the range of 100–250 loading-unloading cycles. The number of elements in the data set for each frequency is shown in Table 1.

To ensure correct model evaluation and avoid information leakage between samples, data splitting was performed on a group basis using the Cycle parameter as a group feature. At the first stage, the GroupShuffleSplit algorithm [41] was employed, which divided the data so that 20% of the unique cycles were assigned to the test set, while the remaining 80% were included in the training set. This made it possible to obtain independent test data that the model had not seen during training, which was used exclusively for the final evaluation of the model’s generalization ability. In the second stage, a separate validation sample was formed from the training set, also using the group principle. For this, GroupShuffleSplit was used with test_size = 0.1, i.e., 10% of the training samples were used for validation.
Thus, the structure of the final split can be presented as follows:
• training set—72% of all cycles.
• validation set—8% of all cycles.
• test set—20% of all cycles.
Group splitting by the Cycle parameter ensures that all data from a single cycle falls into only one sample—training, validation, or test. This avoids mixing data from the same cycle between samples and prevents information leakage. This approach enables a more objective evaluation of the model’s ability to generalize data, as it is tested on completely new cycles that it did not encounter during training or validation.
In this study, a deep learning model based on the TCN [42,43] was used to model the nonlinear hysteresis behavior of SMA. This approach combines the advantages of convolutional neural networks and specialized mechanisms for processing time-series data, making TCN an effective tool for analyzing sequences where the value at each step depends on the previous history. TCN utilizes causal convolutions, ensuring that each prediction is based solely on the previous values of the sequence. This is critical for accurately reproducing the material’s mechanical behavior, since the deformation at a given time depends on the loading history and phase transformations that occurred before. One of the key features of TCN is the use of dilated convolutions, which enable the model to cover a much longer time interval without increasing the network’s depth or reducing the temporal detail of the signal. Dilations create filters that can analyze both local and long-term dependencies, such as the onset of martensite formation, the accumulation of fatigue effects, or changes in the hysteresis loop from one cycle to the next. This combination of causality and dilatation makes TCN well-suited for modelling SMA behavior under cyclic loading. The strain of the material is not only determined by the current stress value, but also depends on the load history, including austenite-martensite phase transitions, the direction of deformation (loading or unloading), and the cycle number, which reflects fatigue accumulation. The TCN model accounts for all these relationships in a time sequence, making it suitable for accurate prediction of hysteresis loop shapes.
To assess the model’s prediction accuracy comprehensively, several metrics reflecting different errors were used (Table 2) [44].
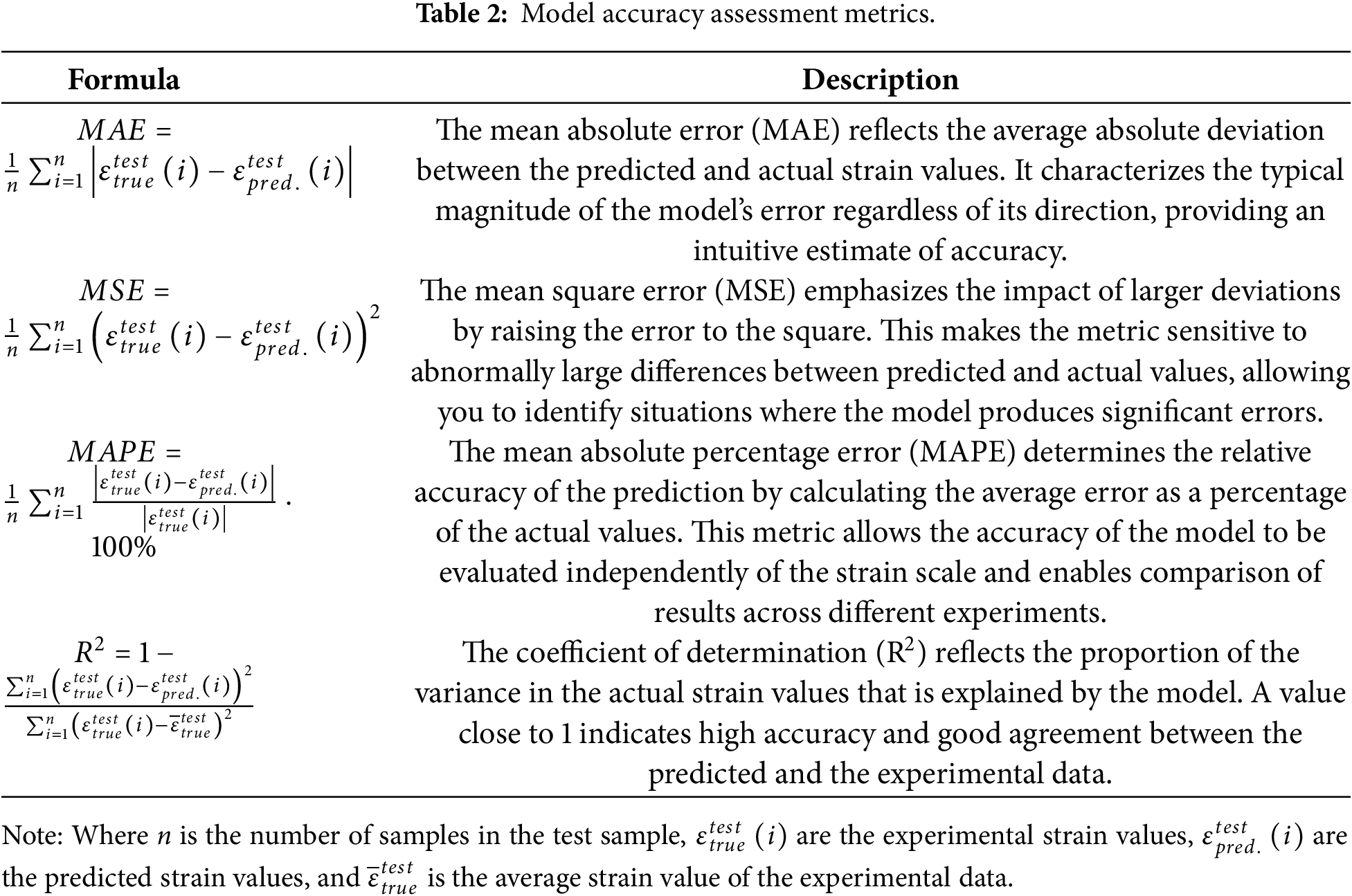
The use of several metrics allowed us to obtain a completer and more objective characterization of the model’s performance.
2.4 Interpreting Model Predictions
In studies that utilize machine learning models, it is crucial to ensure that their decisions can be interpreted using XAI methods [45]. Interpretability enables the understanding of the algorithm’s logic, the evaluation of the impact of individual input parameters on the result, and increased confidence in the model, particularly in cases involving the modeling of complex physical phenomena, such as the hysteresis behavior of SMA. One of the most common and versatile approaches in XAI is the SHAP method [46,47]. It is based on the concept of Shapley values from cooperative game theory, where the contribution of each participant is evaluated by averaging their marginal impact in all possible coalitions. In the context of machine learning, these ‘participants’ refer to the input features of the model, and SHAP provides a mathematically sound method for estimating their individual contributions to the prediction. The SHAP method enables us to quantitatively determine the extent to which each feature contributes to shifting the predicted value relative to the baseline model (expected value). For regression problems, SHAP values are interpreted as the influence of a single feature on the change in prediction. This representation is particularly useful when analyzing non-linear deep learning models, where the relationships between input parameters and the output variable are complex and often implicit.
For an ensemble model with prediction
where
The value of
where
The SHAP method allows us to evaluate both the global importance of features, which determines their average contribution to the model, and the local contribution of each individual feature to the prediction for a specific sample. This approach increases the transparency of the model and provides a deeper understanding of the decision-making logic, as it allows interpreting which parameters and to what extent influenced the result.
3.1 Neural Network Architecture
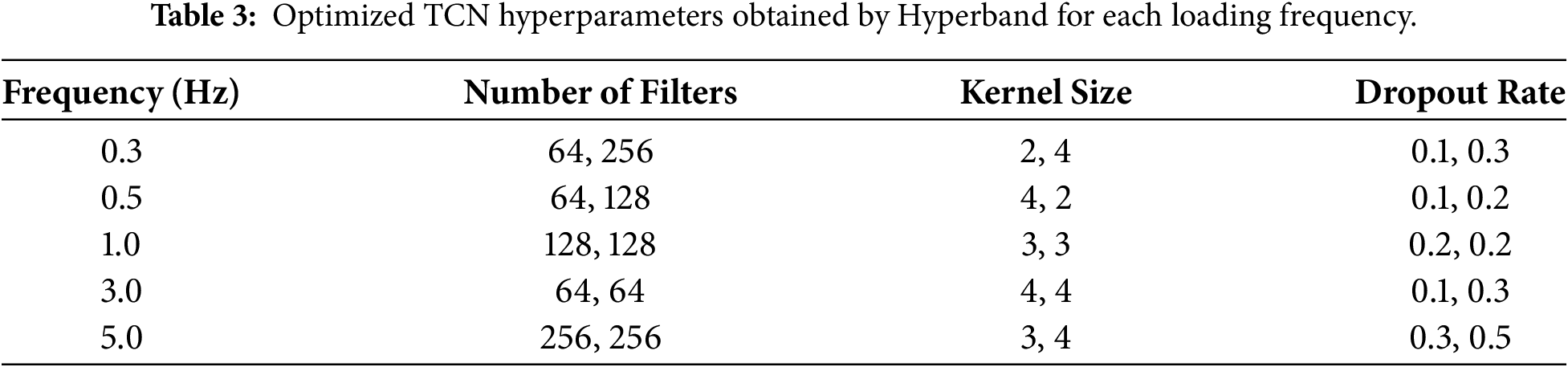
A TCN neural network was used to predict the nonlinear hysteresis behavior of SMA. The models were built using the TensorFlow/Keras framework [49], and their configuration was optimized using the Hyperband algorithm, part of the Keras Tuner library. Hyperband performed an effective search in a large space of architectures and parameters, rejecting uncompetitive configurations and directing resources to the most promising models. Both structural and training hyperparameters of the TCN network were considered in the search process. In particular, the number of TCN stacks varied from 1 to 3, and for each stack, the number of convolutional filters (64–256 with a step of 64) and the size of the convolution kernel (kernel_size ∈ (2, 3, 4)) were optimized. For each stack, a Dropout regularization level in the range 0.1–0.5 was additionally selected, which helped balance the model’s generalization and prevent overfitting. The Hyperband algorithm performed a multi-stage search in the hyperparameter space, combining early termination of non-competitive configurations with the concentration of computational resources on the most promising models. The quality criterion during tuning was the loss on the validation set (objective = val_loss), with a maximum number of epochs of 1500 for a single experiment and the use of the EarlyStopping mechanism with val_loss control.
A set of dilation rates was fixed (dilation_rates = [1, 2, 4, 8, 16]), which ensured deep coverage of time scales without reducing the temporal resolution of the sequence. The use of causal dilated convolutions in TCN allows for an increase in the receptive field without the use of pooling operations or subsampling. Thanks to this, the model preserves the original temporal discretization of the data, with no time steps discarded or aggregated. Thus, TCN captures long temporal dependencies while simultaneously processing the input signal at its full, initial resolution. Training within Hyperband was performed with a batch size of 8 and a validation fraction of 0.1 of the training sample. In TCN stacks, the Rectified Linear Unit (ReLU) is used as an activation function, ensuring the model’s non-linearity and stability during optimization with long time sequences. The use of ReLU reduces the risk of gradient vanishing and enables the network to effectively learn the characteristics of martensite-austenite phase transitions, which exhibit pronounced nonlinearity.
The model was optimized using the Adam algorithm, which employed a dynamic learning rate coefficient. The initial learning rate (initial_lr) was determined by Keras Tuner during the automatic search (10−3 or 10−4). Further changes in the learning rate were implemented using exponential decay (ExponentialDecay). It provides a gradual and controlled decrease in the learning rate. This approach allows the model to reduce the gradient descent step as it approaches the minimum of the loss function. MSE is used as the loss function, which is the basic criterion for regression. For a comprehensive assessment of the learning process, an extended set of metrics (MSE, MAE, R2, and MAPE) was also applied, which enabled analysis of the model’s quality in terms of both absolute and relative error indicators, as well as the coefficient of determination.
Fig. 4 illustrates the dynamics of the TCN model’s learning quality indicators at a frequency of 1 Hz, specifically the changes in MAE, MSE, and the coefficient of determination (R2) over the epochs.
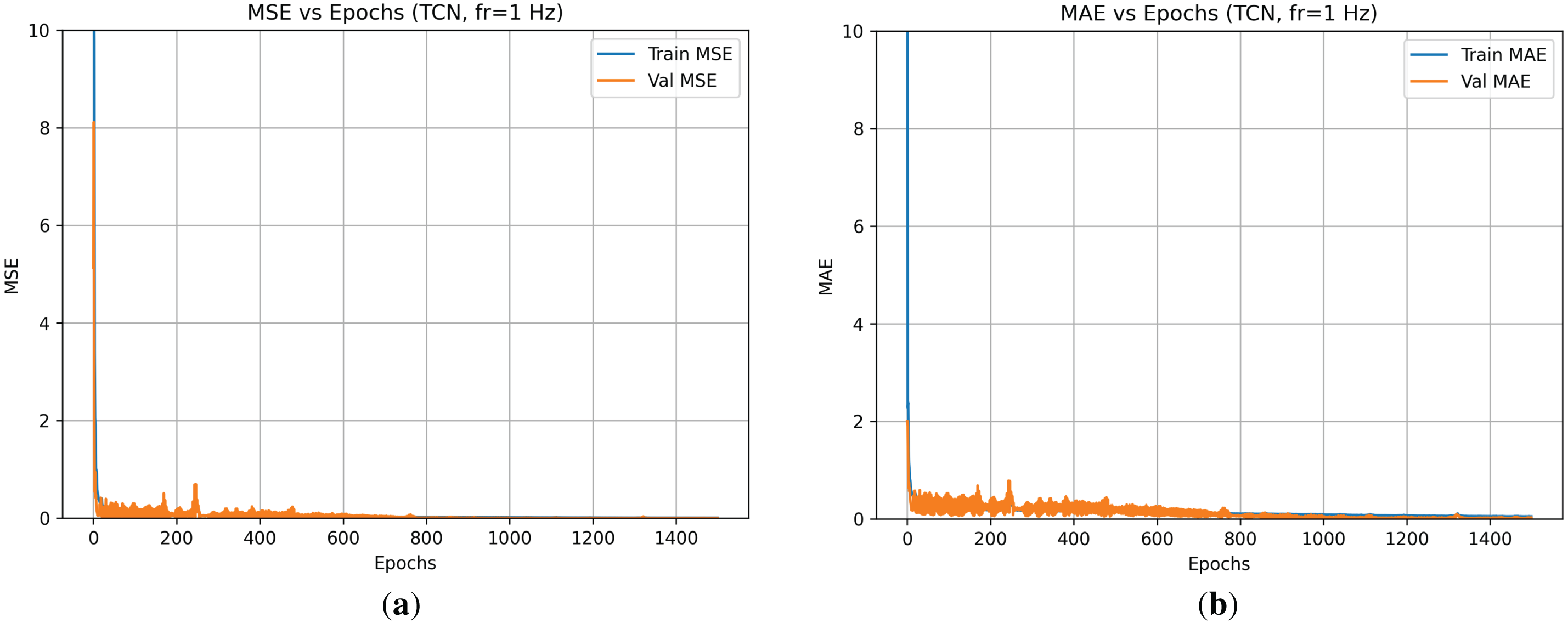
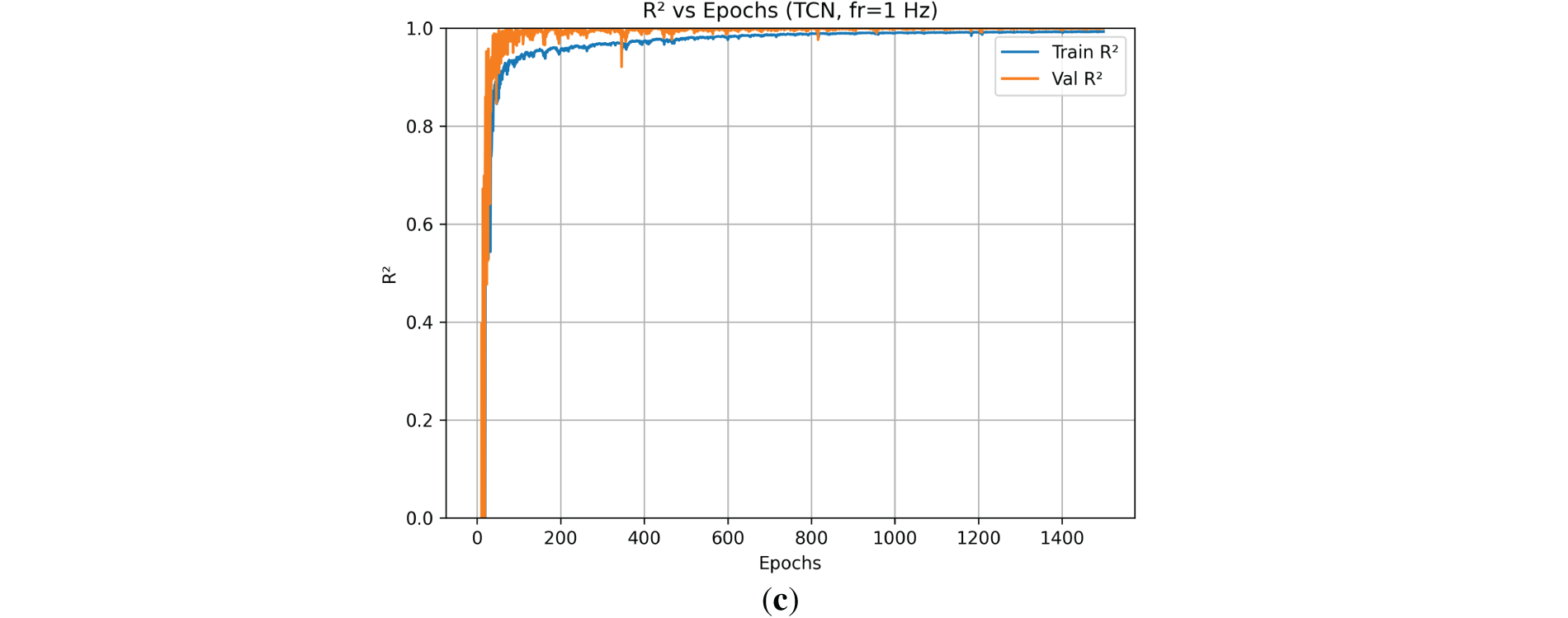
Figure 4: Training dynamics of the TCN model for the loading frequency of 1 Hz: (a) MSE vs. epochs; (b) MAE vs. epochs; (c) R2 vs. epochs.
The curves show a rapid improvement in prediction quality during the early stages of training. The MAE and MSE values decreased rapidly during the first few tens of epochs. The validation curves closely match the training curves, indicating the absence of overfitting and effective generalization from the training data. The R2 coefficient of determination increases to levels above 0.95 at the beginning of training and approaches 1.0 in subsequent epochs, reflecting the model’s ability to reproduce most of the variance in the experimental data. This behavior of the curves confirms the high stability and convergence of the TCN architecture.
The structure of the final selected model comprises sequential TCN stacks with optimal numbers of filters and convolution kernel sizes, followed by Dropout layers selected during tuning (Table 3). The final element is the TimeDistributed Dense layer, which generates a strain prediction for each time step of the input sequence.
For each loading frequency, after training and hyperparameter optimization, the TCN model was saved as a separate .keras file. This format ensures full compatibility with TensorFlow and contains the model architecture, weights, and optimizer configuration. This guarantees the ability to accurately reproduce the results and further use the model without retraining. The data scaling object (RobustScaler) was stored separately. This ensured that new data were processed correctly under the same conditions as during training.
3.2 Model Performance Evaluation
The model’s effectiveness was evaluated using standard regression metrics (MSE, MAE, R2, and MAPE), which provide a comprehensive measure of prediction accuracy. In this study, a separate TCN model was constructed for each loading frequency, enabling hyperparameters to be tailored to the specifics of the SMA strain. The generalized results of the models for frequencies of 0.3, 0.5, 1.0, 3.0, and 5.0 Hz are shown in Table 4.
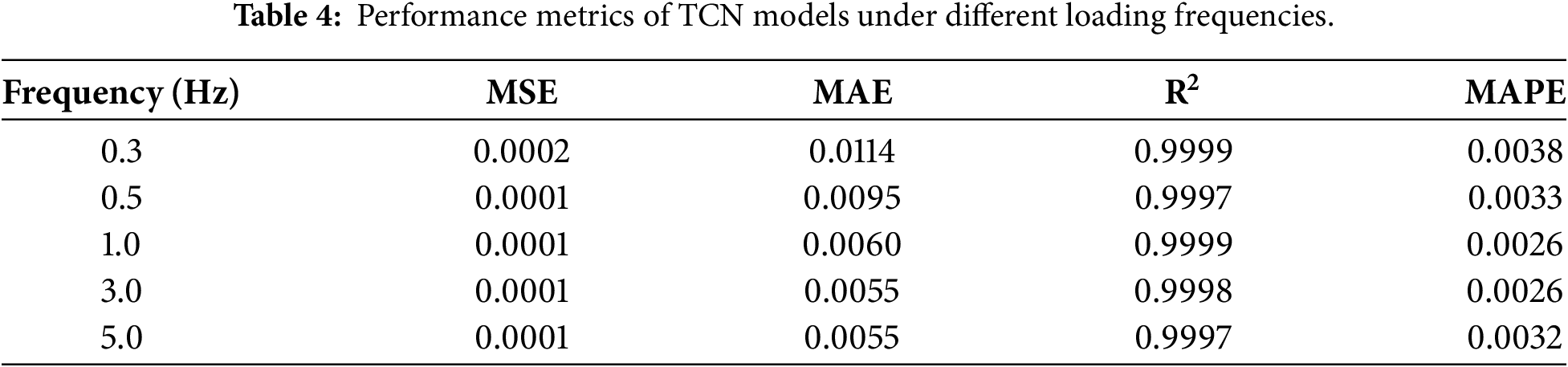
As shown in Table 4, each model demonstrates high prediction accuracy within the corresponding frequency range. The MSE and MAE values remain low, indicating the network’s ability to accurately reproduce the strain value in absolute units. High R2 determination coefficient values (close to 1.0) confirm the high-quality reproduction of the general shape of the hysteresis loop and the stable modeling of its evolution within each frequency mode. The MAPE metric shows low relative errors, which is critical when comparing predictions across different frequencies. Thus, the results indicate that building separate TCN models for each loading frequency provides high prediction accuracy and model stability.
3.3 Evaluation of Model Extrapolation Capability
To assess the ability of the developed neural networks to generalize strain patterns beyond the training and validation ranges, independent testing was performed on loading cycles not included in any of the training samples. This set included cycles 251, 260, 300, 350, 400, 450, and 500. Such testing enabled analysis of TCN models’ extrapolation ability to predict the alloy’s hysteresis behavior. The evaluation was carried out by comparing the predicted and experimental hysteresis loops and calculating the corresponding accuracy metrics (Table 5).
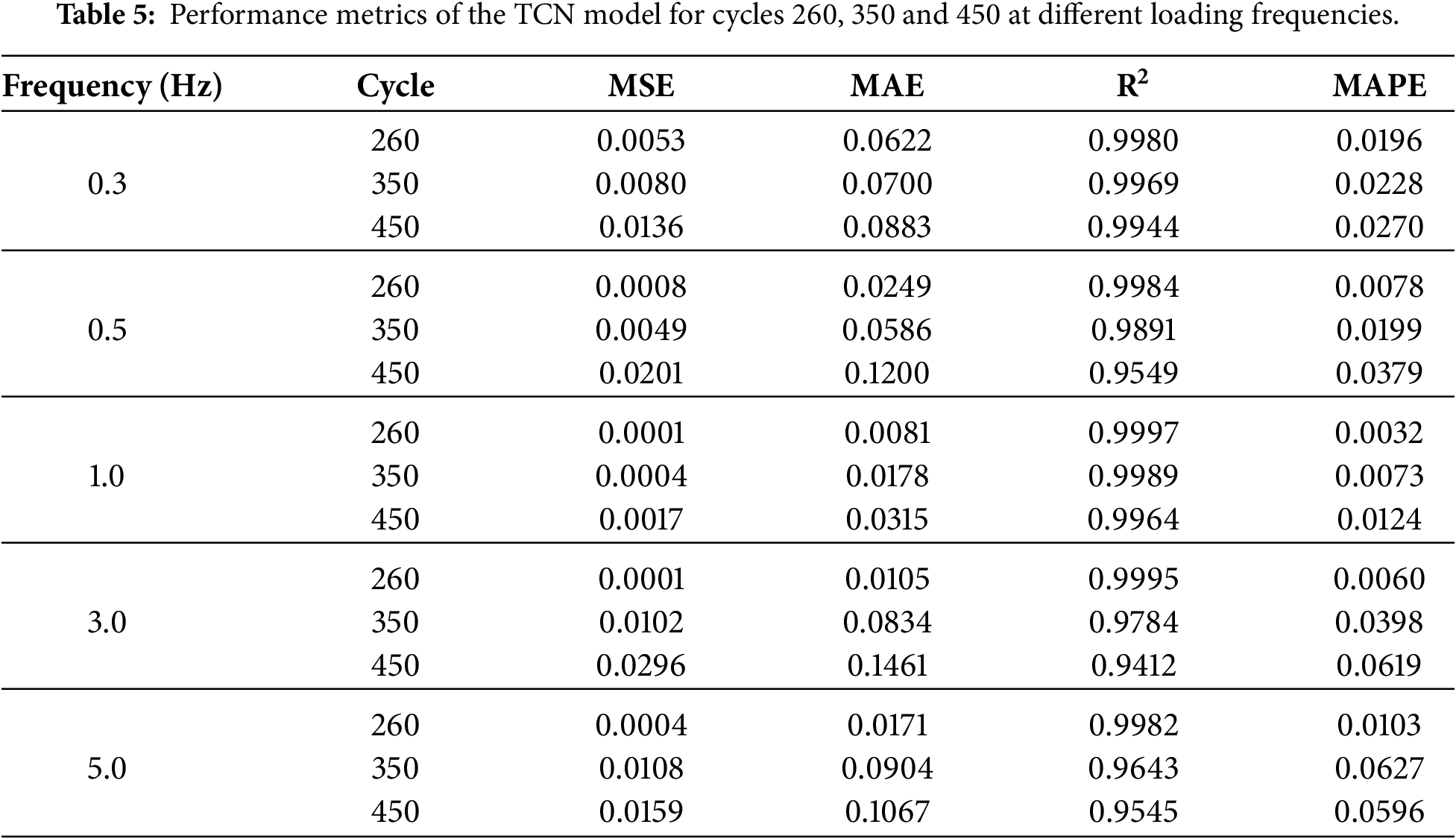
The results demonstrate a change in prediction accuracy with respect to the cycle number, reflecting the impact of fatigue on the quality of modeling. For all frequencies, the model’s accuracy decreases with increasing cycle number. This manifests as increases in MSE and MAE, a rise in MAPE, and a gradual decline in R2 values. This behavior is physically justified, as higher cycles (350 and 450) are characterized by a more pronounced accumulation of fatigue processes and a change in loop shape, which complicates their accurate reproduction by the model. Thus, TCN models demonstrate a stable and physically justified ability to extrapolate.
Fig. 5 shows a comparison of predicted and experimental strain values for cycles 260, 350, and 450 at a frequency of 1 Hz. It is presented as scatter plots with an ideal prediction line.
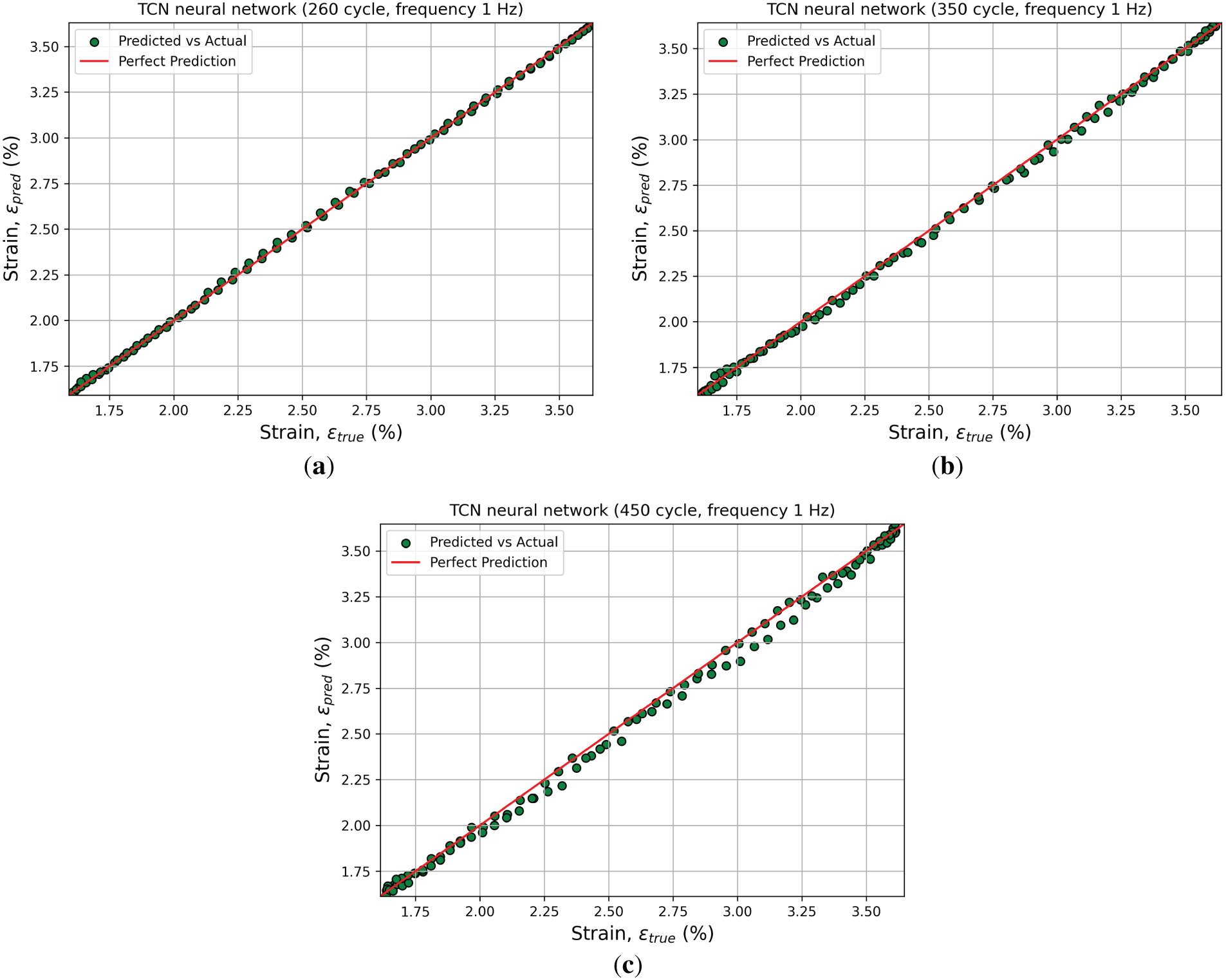
Figure 5: Predicted vs. experimental strain values obtained using the TCN model for the extrapolation cycles at 1 Hz: (a) cycle 260; (b) cycle 350; (c) cycle 450.
The results for cycle 260 show almost complete overlap of the points along the ideal prediction line, indicating very high model accuracy in the early testing cycles. The result for cycle 350 shows that the correlation between the predicted and actual values remains high, although there are slight deviations associated with the initial manifestations of fatigue processes, which the model cannot predict perfectly. Cycle 450 is characterized by a slightly greater deviation from the ideal prediction line, which corresponds to a change in the shape of the stress-strain loop in the later stages. The results demonstrate that the TCN model consistently and accurately reproduces the alloy’s behavior across independent cycles. The gradual increase in error with increasing cycle number is physically justified and consistent with the model’s expected ability to predict the effect of functional fatigue on the material.
Fig. 6 shows a comparison of experimental and TCN-predicted hysteresis loops for cycles 260, 350, and 450 at a frequency of 1 Hz.
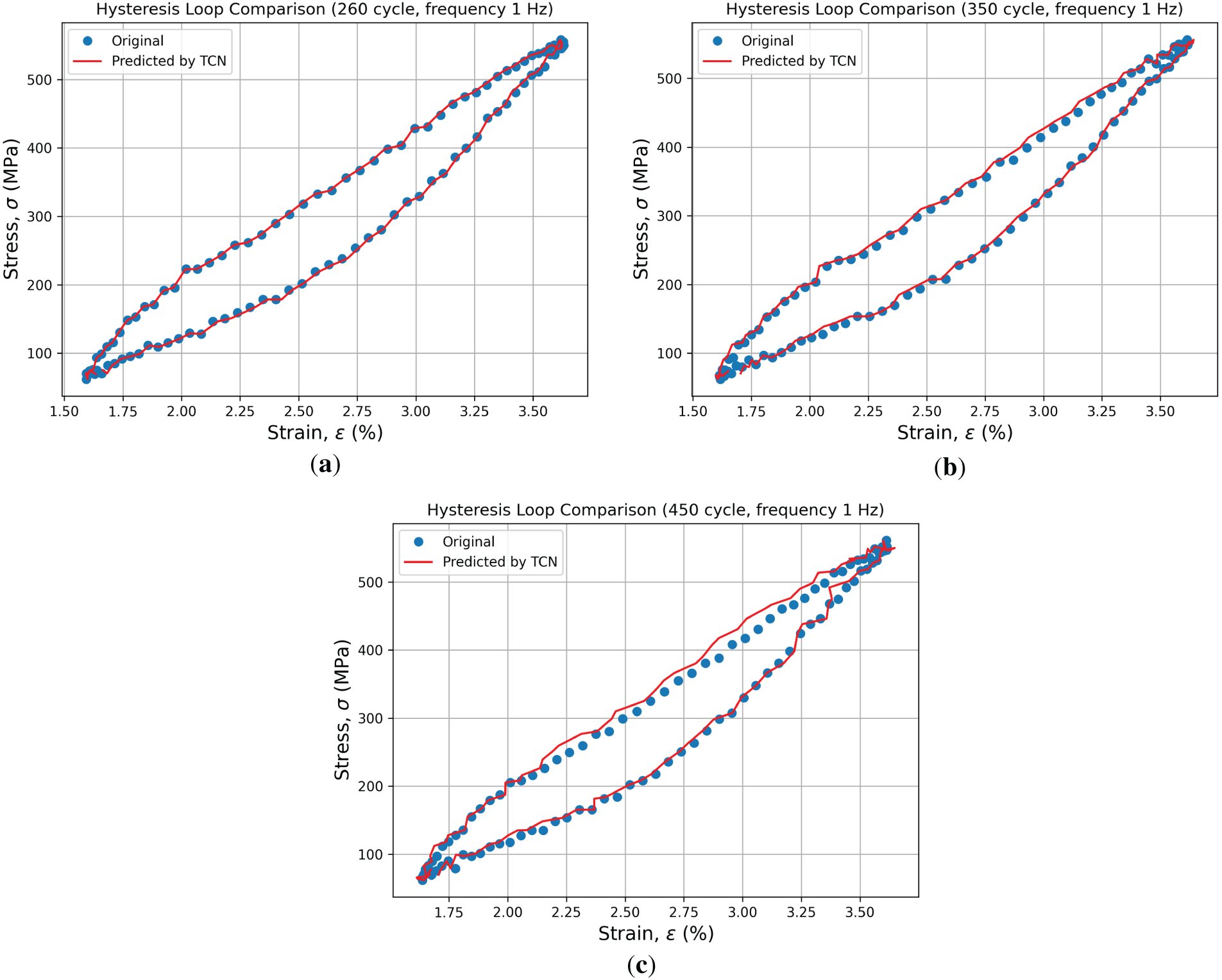
Figure 6: Comparison of experimental and TCN-predicted hysteresis loops at 1 Hz: (a) cycle 260; (b) cycle 350; (c) cycle 450.
The results for cycle 260 show that the model accurately reproduces the loop branches, ensuring complete overlap between the predicted curve and the experimental points. This indicates high model accuracy in early test cycles near the training range. For cycle 350, the model also accurately reproduces the general shape of the loop; however, local deviations occur between the prediction and the actual data, corresponding to the onset of the accumulation of functional fatigue effects in the material. However, the loop’s shape and key characteristics are correctly predicted. The results for cycle 450 show more pronounced changes in the hysteresis loop. In this case, the discrepancy between the predicted and experimental values increases. This model behavior is physically justified, as later cycles reflect a significant accumulation of fatigue, leading to a change in the shape of the stress-strain loop and a decrease in the model’s accuracy during extrapolation. In general, the results presented in Fig. 6 confirm the TCN model’s ability to accurately reproduce the evolution of the hysteresis loop outside the training range and to account for changes caused by functional fatigue of the material.
Although detailed graphical results are presented only for the representative case of 1 Hz, analogous comparisons of predicted and experimental data, as well as of experimental and model-predicted hysteresis loops, were also obtained for the other frequencies and demonstrate similar trends.
The SHAP method was used to interpret the models. The analysis was performed using KernelExplainer, for which background data was generated from a subset of training cycles, ensuring an accurate reflection of local and global feature contributions. The evaluation was performed for three input features (Stress, Cycle, and UpDown).
Global SHAP analysis enables interpreting the model not at the level of individual points but at the scale of the entire sample (individual cycles), characterizing how stable and consistent the influence of a particular feature is across all observations. This provides a deeper understanding of which input features the model considers key to reproducing SMA’s hysteresis behavior, how their importance changes with increasing cycle number, and how the model responds to the accumulation of fatigue effects in the material.
Fig. 7 shows a comparative analysis of the average absolute contributions of features obtained by the SHAP method for cycles 260, 350, and 450 at a loading frequency of 1 Hz.
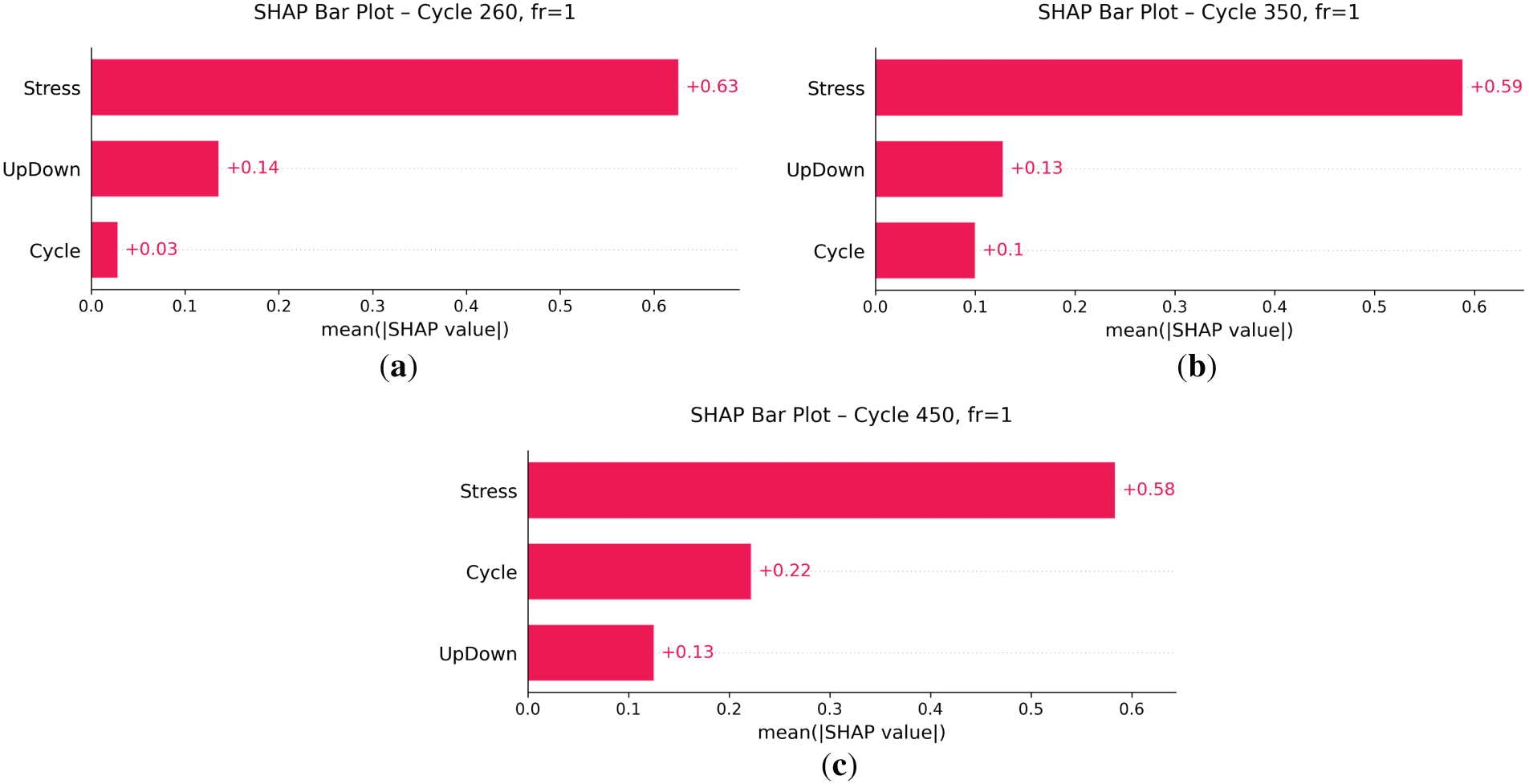
Figure 7: SHAP-based feature contributions for the TCN model at 1 Hz: (a) Cycle 260; (b) Cycle 350; (c) Cycle 450.
The results of the SHAP analysis demonstrate a clear and physically sound structure of feature importance. The Stress parameter is the dominant factor across all cycles studied, consistent with its key role in shaping the alloy’s deformation response. The UpDown parameter maintains a stable, moderate influence, reflecting changes in loading direction throughout the cycle. In contrast, the contribution of the Cycle parameter gradually increases with the cycle number, indicating an increase in its significance as the material’s functional fatigue accumulates with each cycle increment.
Fig. 8 shows SHAP summary diagrams for cycles 260, 350, and 450 at a loading frequency of 1 Hz.
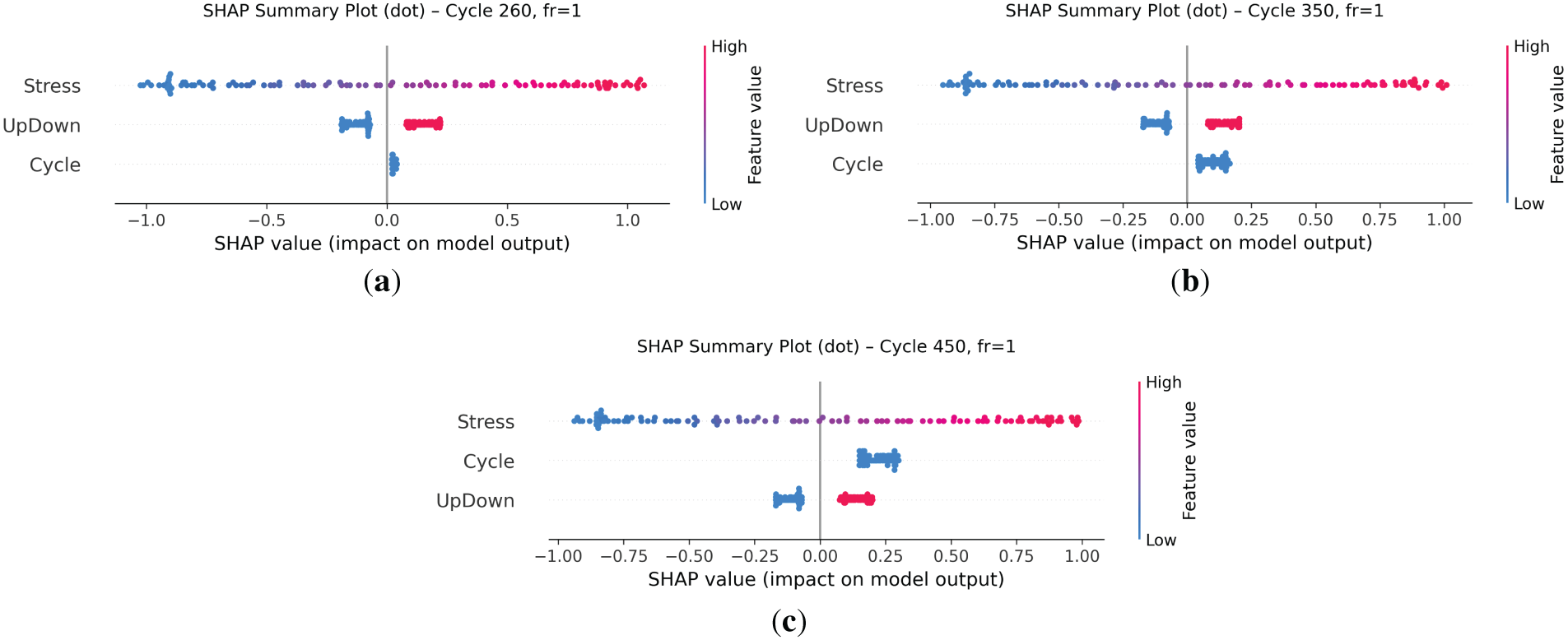
Figure 8: SHAP summary plots for the TCN model at 1 Hz: (a) cycle 260, (b) cycle 350, (c) cycle 450.
In all three graphs, the dominant factor remains the Stress parameter, as evidenced by the wide range of its SHAP values and their significant variability across both positive and negative regions. High Stress values increase the predicted strain value (red dots on the right side of the graph), while low Stress values decrease it. This pattern is physically logical, since stress is the main factor in the formation of the SMA deformation response within the loading cycle. The influence of the UpDown parameter, which indicates the direction of loading or unloading, remains relatively stable in all three cycles. Its SHAP values remain compactly concentrated around zero but are clearly separated by the cycle phase. Low values correspond to the loading phase, high values to the unloading phase. This indicates that the model accurately identifies the distinct phases of the hysteresis loop. The most pronounced changes are observed for the Cycle parameter. In cycle 260 (Fig. 8a), its influence is minimal and concentrated around the zero region. In contrast, in cycles 350 (Fig. 8b) and 450 (Fig. 8c), the SHAP values for Cycle increase, indicating an increase in the parameter’s role under conditions of functional fatigue accumulation.
Fig. 9 shows generalized SHAP heatmaps for cycles 260, 350, and 450 at 1 Hz, allowing us to track the dynamics of feature contributions to the TCN model prediction throughout the entire time series for each sample.
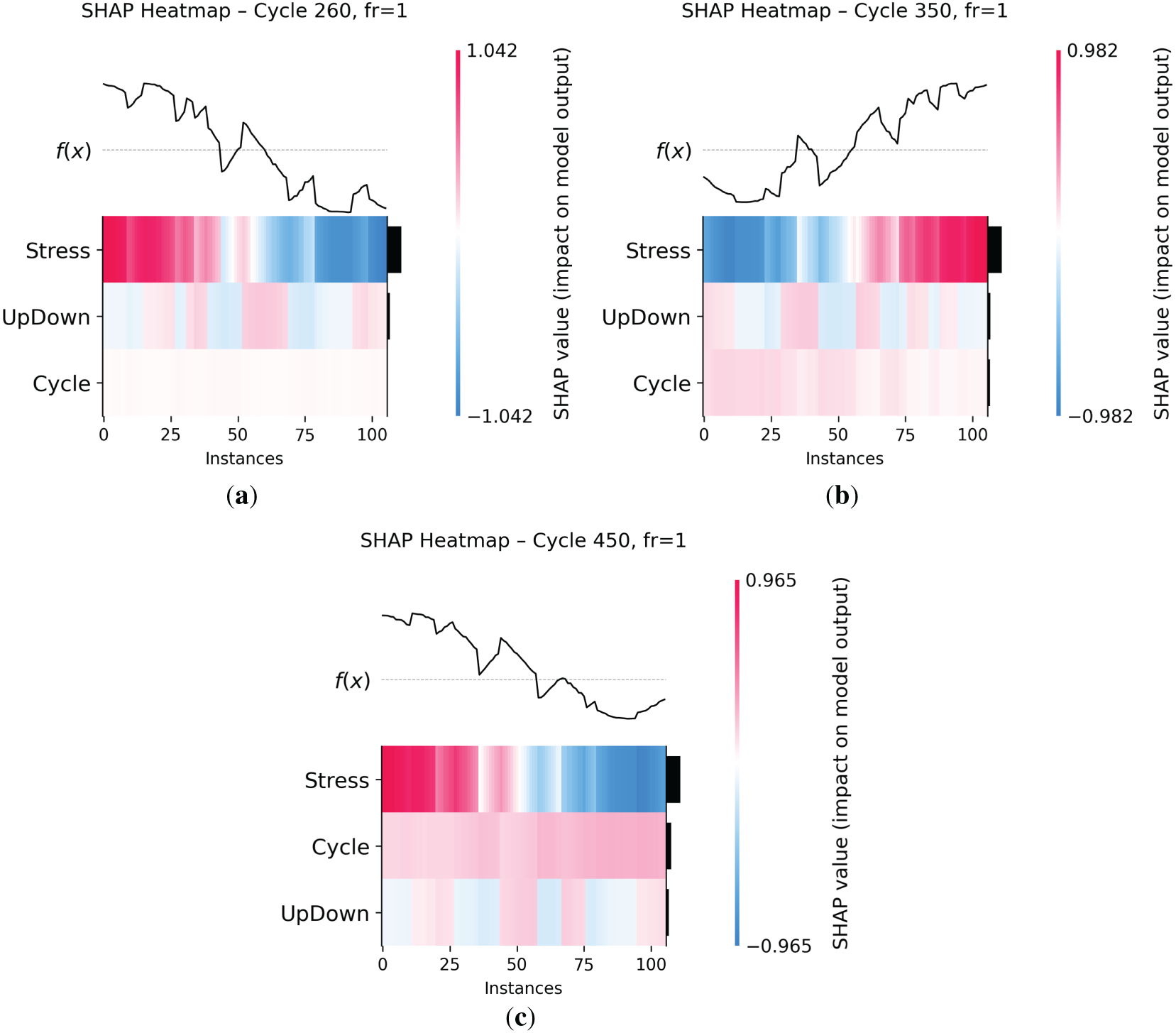
Figure 9: SHAP heatmaps for the prediction of strain at a loading frequency of 1 Hz for cycles (a) 260, (b) 350, and (c) 450.
The upper part of the figures shows the model’s output, f(x), which serves as a reference point for comparing the predicted strain with the corresponding changes in SHAP values. In Fig. 9a, corresponding to cycle 260, the Stress feature shows clear dominance, making the largest positive and negative contributions to the prediction. The positive SHAP influences (red segments) of the Stress feature correspond to an increase in the predicted strain, while the negative values (blue segments) cause it to decrease. The UpDown feature shows a characteristic cyclical structure of contributions, reflecting the transition between the loading and unloading phases. The influence of the Cycle parameter at this stage remains positive but relatively small. In Fig. 9b (cycle 350) and Fig. 9c (cycle 450), the Stress feature remains the key factor determining the largest positive and negative contributions. The UpDown feature retains a stable moderate influence, consistent with its physical role as a loading direction indicator. In contrast, the contribution of the Cycle feature becomes more pronounced as the cycle number increases, suggesting an increasing role in prediction. This dynamic demonstrates the model’s ability to correctly reflect the physically grounded effects of SMA functional fatigue and adequately reproduces the regular changes in the shape of the hysteresis loop as the number of cycles increases.
To understand how individual input features affect the model’s prediction for each observation, a local SHAP analysis of a single sample was performed. Unlike global interpretation methods, which evaluate the average impact of features across the entire data set (the entire cycle), local analysis allows us to examine each feature’s contribution to a specific sample, reflecting the model’s decision-making mechanisms at the micro level. This approach enables tracking changes in feature influences over the loading cycle and determining which values cause increases or decreases in the predicted strain at specific points.
Fig. 10 shows local SHAP waterfall diagrams for one selected sample (sample #50) at cycles 260, 350, and 450 at a frequency of 1 Hz, demonstrating the contribution of each feature to the formation of the predicted strain.
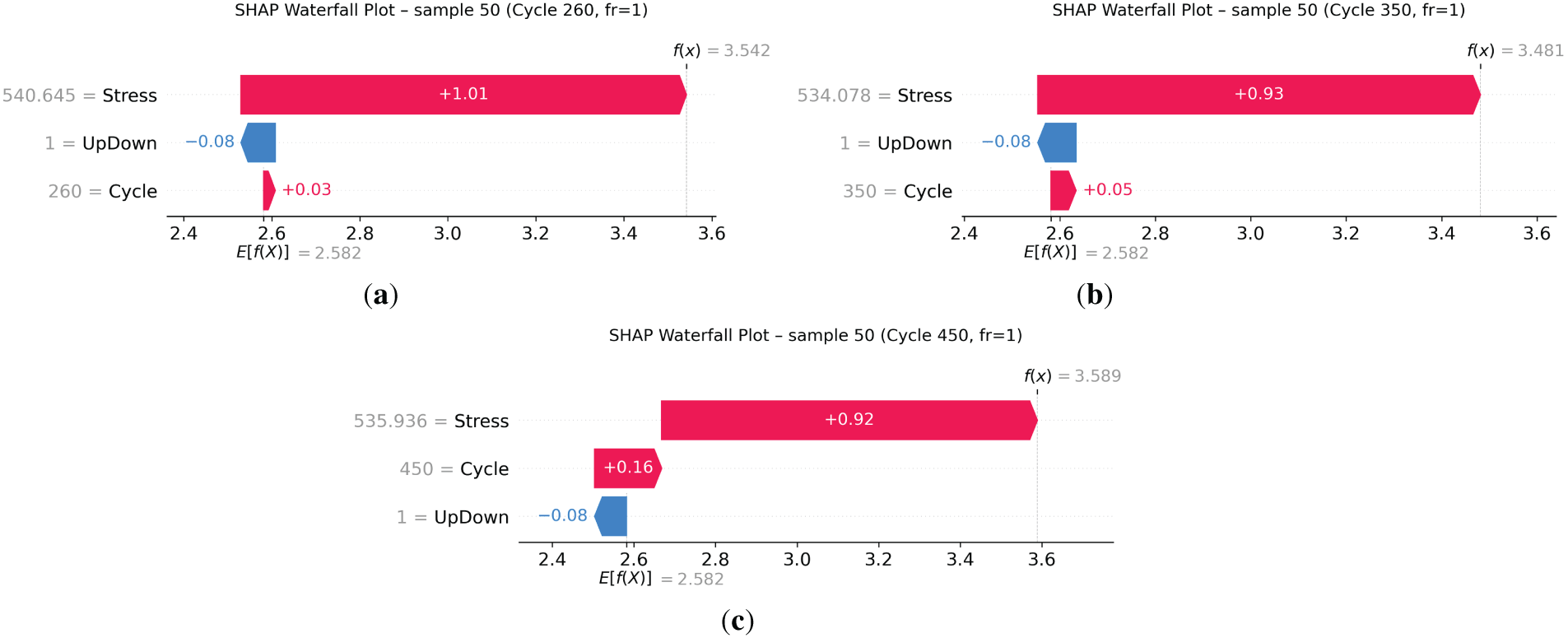
Figure 10: SHAP waterfall plots for sample 50 at 1 Hz for (a) 260, (b) 350, and (c) 450.
Each graph shows how the TCN model moves from the base value E[f(X)] to a specific prediction f(x) by adding or subtracting the contributions of individual features. In the case of cycle 260 (Fig. 10a), the main positive contribution is made by the Stress feature (+1.01), which significantly shifts the prediction towards increased strain, consistent with the physical role of stress as the dominant factor in the alloy’s hysteresis behavior. The UpDown parameter makes a small negative contribution (−0.08), reflecting the influence of the unloading stage. The Cycle feature has a minimal positive contribution (+0.03), since cycle 260 is still close to the training interval. For cycle 350 (Fig. 10b), the contribution structure remains the same, but the contribution of the Cycle parameter increases (+0.05), reflecting the gradual accumulation of functional fatigue effects. In cycle 450 (Fig. 10c), the role of the Cycle feature increases significantly (+0.16), demonstrating the growing importance of this parameter when far from the training range. Thus, the model correctly reflects the physical process of gradual change in the material’s deformation response with increasing cycle number in a single sample.
The study develops an approach to predict the hysteresis behavior of NiTi SMA using a TCN-type deep neural network with an integrated Explainable AI method. The proposed workflow includes the formation of an experimental dataset based on cyclic tests of NiTi wire at frequencies of 0.3–5 Hz, group data splitting by the Cycle parameter using the GroupShuffleSplit algorithm, automated optimization of TCN network hyperparameters using the Hyperband method, and multi-criteria accuracy assessment (MSE, MAE, MAPE, R2). This combination of procedures enabled the construction of separate, high-precision models for each frequency mode, which can reproduce the alloy’s nonlinear deformation response and the shape of hysteresis loops over the training range of 100–250 cycles. The simulation results showed that all constructed TCN models demonstrate very high accuracy in predicting strain within the corresponding loading frequencies. The MSE and MAE values remain low, and the coefficient of determination (R2) is close to 1.0, indicating the network’s ability to reproduce the general shape of the stress-strain loop. Thus, the approach of constructing separate TCN models for each loading frequency is effective for high-precision modelling of SMA hysteresis behavior within the training range.
Special attention is paid to assessing the extrapolation ability of TCN networks. Independent testing on cycles 260, 350, and 450 showed that the models maintain high prediction accuracy in the early and intermediate stages of functional fatigue. As the cycle number increases, MSE, MAE, and MAPE increase regularly, while R2 decreases gradually, corresponding to a change in the shape of the hysteresis loop in the late stages of loading. Such dynamics are physically justified, indicating that the model accurately captures the accumulation of fatigue effects while maintaining acceptable predictive accuracy outside the training range.
The application of SHAP analysis provided an interpretation of the TCN model. Analysis of the average absolute SHAP contributions revealed the dominant role of the Stress parameter, which accounts for most of both positive and negative influences on the predicted strain. The UpDown parameter plays a clearly interpreted role as an indicator of the loading-unloading phase within the cycle. The contribution of the Cycle parameter was relatively small in cycle 260, but increased significantly for cycles 350 and 450, reflecting the growing importance of functional fatigue accumulation. The SHAP-summary and SHAP-heatmap diagrams confirmed the consistency of these patterns across time series, and a local analysis for a single sample #50 demonstrated how Stress, UpDown, and Cycle gradually shift the prediction from the baseline to the final strain value. This indicates the consistency of the internal model representation with the physics of the process, thereby increasing confidence in the results obtained.
The Cycle parameter in this study is interpreted as a carrier of loading history, providing an aggregated representation of the cumulative influence of previous cycles on the current deformation response of the material. Its inclusion in the model enables a clear distinction between data from different cycles and ensures an objective assessment of the model’s generalization capability beyond the training interval. The increase in the contribution of the Cycle parameter, revealed by SHAP analysis at later extrapolation cycles, is associated with the accumulation of functional fatigue and the gradual evolution of the hysteresis loop shape.
The practical significance of the results obtained lies in the fact that the proposed TCN architecture, combined with XAI analysis, can be used as a tool for predicting the deformation response of NiTi SMA under different frequency modes and for assessing the effect of functional fatigue without conducting a full range of experimental tests.
The applicability of the proposed TCN models is limited to the specific NiTi alloy composition and the sinusoidal stress-controlled cyclic loading conditions investigated in this study, within the considered loading frequencies.
Promising areas for further research include combining TCN with recurrent architecture (LSTM/GRU) and using alternative XAI methods (Integrated Gradients) for in-depth analysis of the influence of individual factors on the hysteresis behavior of the material.
Acknowledgement: Not applicable.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, Dmytro Tymoshchuk and Oleh Yasniy; methodology, Dmytro Tymoshchuk and Oleh Yasniy; software, Dmytro Tymoshchuk; validation, Dmytro Tymoshchuk and Oleh Yasniy; formal analysis, Oleh Yasniy, Iryna Didych and Yuri Lapusta; investigation, Dmytro Tymoshchuk and Oleh Yasniy; resources, Pavlo Maruschak; data curation, Dmytro Tymoshchuk; writing—original draft preparation, Dmytro Tymoshchuk and Iryna Didych; writing—review and editing, Dmytro Tymoshchuk, Oleh Yasniy and Yuri Lapusta; visualization, Dmytro Tymoshchuk; supervision, Oleh Yasniy, Yuri Lapusta and Pavlo Maruschak; project administration, Pavlo Maruschak; funding acquisition, Pavlo Maruschak. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The data that supports the findings of this study are available from the corresponding author upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Ramezannejad A, East D, Murphy AB, Lu G, Yang KV. Optimising additive manufacturing of NiTi and NiMnGa shape memory alloys: a review. Metals. 2025;15(5):488. doi:10.3390/met15050488. [Google Scholar] [CrossRef]
2. Hmede R, Chapelle F, Lapusta Y. Review of neural network modeling of shape memory alloys. Sensors. 2022;22(15):5610. doi:10.3390/s22155610. [Google Scholar] [PubMed] [CrossRef]
3. Quan D, Hai X. Shape memory alloy in various aviation field. Procedia Eng. 2015;99:1241–6. doi:10.1016/j.proeng.2014.12.654. [Google Scholar] [CrossRef]
4. Husain A, Al Farsi L, Alshamsi M, Khan SH. Designing and testing shape memory alloy actuators for smart aircraft wings. Transp Eng. 2025;21:100374. doi:10.1016/j.treng.2025.100374. [Google Scholar] [CrossRef]
5. Ameduri S, Brindisi A, Ciminello M, Concilio A, Quaranta V, Brandizzi M. Car soundproof improvement through an SMA adaptive system. Actuators. 2018;7(4):88. doi:10.3390/act7040088. [Google Scholar] [CrossRef]
6. Riccio A, Sellitto A, Battaglia M. Morphing spoiler for adaptive aerodynamics by shape memory alloys. Actuators. 2024;13(9):330. doi:10.3390/act13090330. [Google Scholar] [CrossRef]
7. Ding Q, Chen J, Yan W, Yan K, Kyme A, Cheng SS. A high-performance modular SMA actuator with fast heating and active cooling for medical robotics. IEEE/ASME Trans Mechatron. 2022;27(6):5902–13. doi:10.1109/TMECH.2022.3190930. [Google Scholar] [CrossRef]
8. Ruth DJS, Sohn JW, Dhanalakshmi K, Choi SB. Control aspects of shape memory alloys in robotics applications: a review over the last decade. Sensors. 2022;22(13):4860. doi:10.3390/s22134860. [Google Scholar] [PubMed] [CrossRef]
9. Zainal MA, Sahlan S, Ali MSM. Micromachined shape-memory-alloy microactuators and their application in biomedical devices. Micromachines. 2015;6(7):879–901. doi:10.3390/mi6070879. [Google Scholar] [CrossRef]
10. Sabahi N, Chen W, Wang CH, Kruzic JJ, Li X. A review on additive manufacturing of shape-memory materials for biomedical applications. JOM. 2020;72(3):1229–53. doi:10.1007/s11837-020-04013-x. [Google Scholar] [CrossRef]
11. Suhail R, Amato G, McCrum D. Thermo-mechanical characterisation of NiTi-based shape memory alloy wires for civil engineering applications. J Intell Mater Syst Struct. 2021;32(20):2420–36. doi:10.1177/1045389x211001437. [Google Scholar] [CrossRef]
12. Bernini M, Hellmuth R, Dunlop C, Ronan W, Vaughan TJ. Recommendations for finite element modelling of nickel-titanium stents-Verification and validation activities. PLoS One. 2023;18(8):e0283492. doi:10.1371/journal.pone.0283492. [Google Scholar] [PubMed] [CrossRef]
13. Zakerzadeh MR, Naseri S, Naseri P. Modelling hysteresis in shape memory alloys using LSTM recurrent neural network. J Appl Math. 2024;2024:1174438. doi:10.1155/2024/1174438. [Google Scholar] [CrossRef]
14. Tymoshchuk D, Yasniy O, Maruschak P, Iasnii V, Didych I. Loading frequency classification in shape memory alloys: a machine learning approach. Computers. 2024;13(12):339. doi:10.3390/computers13120339. [Google Scholar] [CrossRef]
15. Gao Y, Hu Y, Zhao X, Liu Y, Huang H, Su Y. Machine-learning-driven design of high-elastocaloric NiTi-based shape memory alloys. Metals. 2024;14(10):1193. doi:10.3390/met14101193. [Google Scholar] [CrossRef]
16. Raji H, Rad M, Acar E, Karaca H, Saedi S. A machine learning approach to predict austenite finish temperature in quaternary NiTiHfPd SMAs. Mater Today Commun. 2024;38:107847. doi:10.1016/j.mtcomm.2023.107847. [Google Scholar] [CrossRef]
17. Tian X, Zhou L, Zhang K, Zhao Q, Li H, Shi D, et al. Screening for shape memory alloys with narrow thermal hysteresis using combined XGBoost and DFT calculation. Comput Mater Sci. 2022;211:111519. doi:10.1016/j.commatsci.2022.111519. [Google Scholar] [CrossRef]
18. Machaka R, Radingoana PM. Prediction of narrow HT-SMA thermal hysteresis behaviour using explainable machine learning. Mater Today Commun. 2023;35:105806. doi:10.1016/j.mtcomm.2023.105806. [Google Scholar] [CrossRef]
19. Zhao XP, Huang HY, Wen C, Su YJ, Qian P. Accelerating the development of multi-component Cu-Al-based shape memory alloys with high elastocaloric property by machine learning. Comput Mater Sci. 2020;176:109521. doi:10.1016/j.commatsci.2020.109521. [Google Scholar] [CrossRef]
20. Yang Y, Fu H, Gao W, Su W, Sun B, Yi X, et al. Data-driven high elastocaloric NiMn-based shape memory alloy optimization with machine learning. Mater Lett. 2024;371:136948. doi:10.1016/j.matlet.2024.136948. [Google Scholar] [CrossRef]
21. Kankanamge UMHU, Reiner J, Ma X, Gallo SC, Xu W. Machine learning guided alloy design of high-temperature NiTiHf shape memory alloys. J Mater Sci. 2022;57(41):19447–65. doi:10.1007/s10853-022-07793-6. [Google Scholar] [CrossRef]
22. Nohira N, Ichisawa T, Tahara M, Kumazawa I, Hosoda H. Machine learning-based prediction of the mechanical properties of β titanium shape memory alloys. J Mater Res Technol. 2025;34:2634–44. doi:10.1016/j.jmrt.2024.12.244. [Google Scholar] [CrossRef]
23. Sridharan S, Velayutham R, Behera S, Murugesan J. Ensemble-based machine learning prediction of the temperature-induced properties of Ti-based high-temperature shape memory alloy. Shape Mem Superelasticity. 2025;11(3):593–607. doi:10.1007/s40830-025-00557-6. [Google Scholar] [CrossRef]
24. Liu HX, Yan HL, Jia N, Yang B, Li Z, Zhao X, et al. Machine learning-assisted discovery of empirical rule for martensite transition temperature of shape memory alloys. Materials. 2025;18(10):2226. doi:10.3390/ma18102226. [Google Scholar] [PubMed] [CrossRef]
25. He S, Wang Y, Zhang Z, Xiao F, Zuo S, Zhou Y, et al. Interpretable machine learning workflow for evaluation of the transformation temperatures of TiZrHfNiCoCu high entropy shape memory alloys. Mater Des. 2023;225:111513. doi:10.1016/j.matdes.2022.111513. [Google Scholar] [CrossRef]
26. Thiercelin L, Peltier L, Meraghni F. Physics-informed machine learning prediction of the martensitic transformation temperature for the design of “NiTi-like” high entropy shape memory alloys. Comput Mater Sci. 2024;231:112578. doi:10.1016/j.commatsci.2023.112578. [Google Scholar] [CrossRef]
27. Liu C, Su H. Machine learning aided prediction of martensite transformation temperature of NiTi-based shape memory alloy. Mater Today Commun. 2024;41(1):110720. doi:10.1016/j.mtcomm.2024.110720. [Google Scholar] [CrossRef]
28. Abedi H, Abdollahzadeh MJ, Bush T, Benafan O, Qattawi A, Elahinia M. Predicting actuation strain in quaternary shape memory alloy NiTiHfX using machine learning. Comput Mater Sci. 2025;246:113345. doi:10.1016/j.commatsci.2024.113345. [Google Scholar] [CrossRef]
29. Canadinc D, Breitbach EJ, Catal AA. Characterization of two novel NiTiHf shape memory alloys designed by machine learning utilizing novel experimental techniques. Shape Mem Superelasticity. 2025;11(3):394–407. doi:10.1007/s40830-025-00551-y. [Google Scholar] [CrossRef]
30. Liu S, Kappes BB, Amin-ahmadi B, Benafan O, Zhang X, Stebner AP. Physics-informed machine learning for composition-process–property design: shape memory alloy demonstration. Appl Mater Today. 2021;22:100898. doi:10.1016/j.apmt.2020.100898. [Google Scholar] [CrossRef]
31. Sedmák P, Šittner P, Pilch J, Curfs C. Instability of cyclic superelastic deformation of NiTi investigated by synchrotron X-ray diffraction. Acta Mater. 2015;94:257–70. doi:10.1016/j.actamat.2015.04.039. [Google Scholar] [CrossRef]
32. Chu K, Sun Q. Reducing functional fatigue, transition stress and hysteresis of NiTi micropillars by one-step overstressed plastic deformation. Scr Mater. 2021;201:113958. doi:10.1016/j.scriptamat.2021.113958. [Google Scholar] [CrossRef]
33. Xu P, Ji X, Li M, Lu W. Small data machine learning in materials science. npj Comput Mater. 2023;9(1):42. doi:10.1038/s41524-023-01000-z. [Google Scholar] [CrossRef]
34. Heidenreich JN, Mohr D. Extended minimal state cells (EMSCself-consistent recurrent neural networks for rate- and temperature dependent plasticity. Int J Plast. 2025;188:104305. doi:10.1016/j.ijplas.2025.104305. [Google Scholar] [CrossRef]
35. Yasniy O, Tymoshchuk D, Didych I, Zolotyi R, Tymoshchuk V. Modeling of shape memory alloys hysteresis behavior considering the loading cycle frequency. Procedia Struct Integr. 2025;72:188–94. doi:10.1016/j.prostr.2025.08.091. [Google Scholar] [CrossRef]
36. Yasniy O, Tymoshchuk D, Didych I, Iasnii V, Pasternak I. Modelling the properties of shape memory alloys using machine learning methods. Procedia Struct Integr. 2025;68(1):132–8. doi:10.1016/j.prostr.2025.06.033. [Google Scholar] [CrossRef]
37. Yasniy O, Iasnii V, Pastukh O, Didych I, Fedak S, Fedak S, et al. Estimation of shape memory alloys functional properties by methods of artificial intelligence. Procedia Struct Integr. 2024;59:17–23. doi:10.1016/j.prostr.2024.04.004. [Google Scholar] [CrossRef]
38. Iasnii VP, Junga R. Phase transformations and mechanical properties of the nitinol alloy with shape memory. Mater Sci. 2018;54(3):406–11. doi:10.1007/s11003-018-0199-7. [Google Scholar] [CrossRef]
39. Iasnii V, Bykiv N, Yasniy O, Budz V. Methodology and some results of studying the influence of frequency on functional properties of pseudoelastic SMA. Sci J TNTU. 2022;107(3):45–50. doi:10.33108/visnyk_tntu2022.03.045. [Google Scholar] [CrossRef]
40. Iasnii V, Krechkovska H, Budz V, Student O, Lapusta Y. Frequency effect on low-cycle fatigue behavior of pseudoelastic NiTi alloy. Fatigue Fract Eng Mater Struct. 2024;47(8):2857–72. doi:10.1111/ffe.14331. [Google Scholar] [CrossRef]
41. Scikit-learn [Internet]. [cited 2025 Nov 23]. Available from: https://scikit-learn.org/stable/modules/generated/sklearn.model_selection.GroupShuffleSplit.html. [Google Scholar]
42. Bai S, Kolter JZ, Koltun V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv:1803.01271. 2018. doi: 10.48550/arxiv.1803.01271. [Google Scholar] [CrossRef]
43. GitHub. GitHub—Baichenjia/Tensorflow-TCN: Tensorflow eager implementation of temporal convolutional network (TCN) [Internet]. [cited 2025 Nov 23]. Available from: https://github.com/Baichenjia/Tensorflow-TCN. [Google Scholar]
44. Scikit-Learn. Metrics and scoring: quantifying the quality of predictions [Internet]. [cited 2025 Oct 14]. Available from: https://scikit-learn.org/stable/modules/model_evaluation.html#model-evaluation. [Google Scholar]
45. IBM. What is explainable AI (XAI)? | IBM [Internet]. [cited 2025 Oct 6]. Available from: https://www.ibm.com/think/topics/explainable-ai. [Google Scholar]
46. SHAP latest documentation. Welcome to the SHAP documentation [Internet]. [cited 2025 Jul 26]. Available from: https://shap.readthedocs.io/en/latest/. [Google Scholar]
47. GitHub. GitHub—shap/shap:a game theoretic approach to explain the output of any machine learning model [Internet]. [cited 2025 Oct 14]. Available from: https://github.com/shap/shap. [Google Scholar]
48. Lundberg S, Lee SI. A unified approach to interpreting model predictions. arXiv:1705.07874. 2017. doi: 10.48550/arxiv.1705.07874. [Google Scholar] [CrossRef]
49. TensorFlow. Keras: the high-level API for TensorFlow | TensorFlow core [Internet]. [cited 2025 Oct 14]. Available from: https://www.tensorflow.org/guide/keras. [Google Scholar]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools