
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
DeepEchoNet: A Lightweight Architecture for Low Resolution Monocular Depth Estimation
1 Department of Computer, Control and Management Engineering, Sapienza University of Rome, Rome, Italy
2 Department of Civil, Computer Science and Aeronautical Technologies Engineering, Roma Tre University, Rome, Italy
* Corresponding Author: Paolo Russo. Email:
(This article belongs to the Special Issue: Advances in Efficient Vision Transformers: Architectures, Optimization, and Applications)
Computers, Materials & Continua 2026, 88(1), 14 https://doi.org/10.32604/cmc.2026.079331
Received 20 January 2026; Accepted 25 March 2026; Issue published 08 May 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Monocular depth estimation (MDE) has become a practical alternative to active range sensing in many indoor scenarios, enabled by supervised deep learning models that predict dense depth maps from a single RGB image. However, most modern MDE systems assume mid-to-high resolution inputs and non-trivial compute budgets, limiting their direct applicability in embedded and bandwidth-constrained settings. This paper studies low resolution MDE, focusing onGraphic Abstract
Keywords
Depth perception is a fundamental cue for understanding and interacting with the physical world. Robots, autonomous agents, and assistive systems benefit from reliable 3D information to navigate cluttered environments, avoid obstacles, manipulate objects, and reason about scene geometry. Traditionally, depth is obtained from active range sensors such as LiDAR or structured-light RGB-D cameras, which directly measure distances to visible surfaces. While highly accurate, these sensors are often expensive, power-hungry, and mechanically fragile, complicating large-scale deployment in low-cost platforms and embedded devices.
In contrast, monocular RGB cameras are cheap, compact, and ubiquitous, which motivates predicting dense depth from a single RGB image (monocular depth estimation). Methodologically, progress accelerated with deep learning, starting from early multi-scale CNN models [1]. More recent approaches leverage transformer backbones and mixed-supervision/scale-robust objectives to improve both accuracy and cross-domain generalization [2–4].
Deep learning has substantially improved monocular depth prediction quality on standard benchmarks such as NYU Depth v2 [5], and more recent transformer-based and hybrid CNN-transformer designs further advanced dense prediction by modeling long-range dependencies [2,6,7]. However, most existing approaches implicitly assume relatively high-resolution inputs (e.g., 480p or higher) and mid- to high-capacity backbones. In embedded or resource-constrained settings, memory and compute budgets are tight, and bandwidth limitations may enforce aggressive compression or downsampling of the input stream. In these scenarios, systems may operate with low resolution imagery such as
We emphasize that the target resolution itself (

In contrast, we treat low resolution as a primary constraint. Following our analysis, the core motivation is to enable depth-aware perception in embedded and bandwidth-limited scenarios where high-resolution processing is impractical.
Within the context of lightweight MDE under strict resolution constraints, the contributions of this work are as follows:
• Design regime centered on low resolution. We study monocular depth estimation under a strict 96
• DeepEchoNet architecture for low resolution MDE. We propose a compact hybrid encoder-decoder built on MobileViT [8] and inverted residual blocks [9], coupled with a guided multi-scale decoder with lightweight skip recalibration (scSE) [10] and Atrous Spatial Pyramid Pooling (ASPP)-Lite context refinement.
• Training pipeline tailored to low resolution inputs. We design a joint RGB-depth pre-processing and augmentation pipeline, including a strong-to-weak schedule, that preserves geometric consistency while improving robustness at low resolution.
• Empirical validation on NYU Depth v2. We evaluate DeepEchoNet on NYU Depth v2 [5], compare against adapted mobile baselines (including METER [11]) at the same resolution, and provide ablations to quantify the impact of key components.
The rest of the paper is organized as follows: Section 2 reviews the related literature, contrasting heavy-weight depth estimation models with efficient lightweight architectures. Section 3 details the proposed DeepEchoNet framework, including the encoder-decoder design and the training objective. Section 4 describes the experimental setup, covering the dataset, preprocessing pipeline, and implementation details. Section 5 presents the quantitative and qualitative results, comparing the proposed method against baselines and analyzing component contributions through ablation studies. Finally, Section 6 summarizes the main findings and concludes the paper.
Backbones and dense prediction patterns in MDE. Modern monocular depth estimation (MDE) builds on encoder-decoder dense prediction designs, where skip connections help recover spatial detail and multi-scale context modules enlarge the effective receptive field. U-Net-style skip fusion [12] and atrous spatial pyramid pooling (ASPP) [13] remain common building blocks in depth decoders and refiners. Recent hierarchical transformers such as Swin [3] provide an efficient backbone for dense prediction, and have been widely adopted (directly or via pretrained encoders) in modern depth models [2].
High-capacity and foundation-style MDE models. Early supervised MDE methods demonstrated that deep models can learn metric scene geometry from RGB-D data; a representative milestone is the multi-scale CNN of Eigen et al. [1] on NYU Depth v2 [5]. In the 2021-2024 literature, transformer-based depth estimators improved global context modeling and transfer: DPT [2] adapts transformer backbones for dense prediction, while LeReS-style mixed-supervision training addresses scale/shift issues to recover more realistic scene shape [4]. Structured reasoning has also returned in modern form: NeWCRFs [14] uses neural window fully-connected CRFs as a decoder to refine monocular depth. In parallel, hybrid global-local designs such as GLPDepth (Global-Local Path Networks for Monocular Depth Estimation) [15] target strong accuracy on indoor benchmarks.
Another influential direction reformulates depth estimation as structured classification/ordinal regression over discretized depth values. AdaBins [16] predicts adaptive global bin centers and per-pixel assignments, while LocalBins [17] extends this idea by learning local depth distributions. PixelFormer [18] further explores attention-based skip fusion and ordinal/binning formulations within an encoder-decoder design.
Large-scale multi-dataset training has recently moved toward foundation-style depth models. MiDaS v3.1 [19] highlights the value of mixed supervision (relative and metric cues) for cross-domain transfer, ZoeDepth [20] explicitly combines relative and metric depth training, and Depth Anything [21] scales training using large amounts of (pseudo-)labeled data to improve zero-shot robustness. Relatedly, synthetic data generation pipelines (e.g., RGB-D diffusion) can further increase data diversity [22].
Lightweight and efficient MDE models. Lightweight and efficient deep models for deployment on resource-constrained edge platforms have been widely studied beyond depth estimation, especially in classification and detection. For example, MobileOne [23] is a mobile-oriented backbone explicitly designed to optimize real device latency rather than proxy metrics such as FLOPs alone, achieving sub-millisecond inference on a smartphone while remaining effective across multiple vision tasks.
Similarly, MobileDets [24] studies object detection architectures tailored to mobile accelerators, showing that hardware-aware design can improve the latency/accuracy trade-off across different embedded platforms. Finally, models such as EdgeViT [25] and MicroViT [26] have been proposed as lightweight Vision Transformers optimized for edge deployment, achieving a favorable trade-off between accuracy, latency, and energy efficiency through EdgeViT’s Local-Global-Local attention design and MicroViT’s low-complexity, single-head attention mechanism. These works highlight the broader importance of efficiency-driven and hardware-aware model design for real-time vision on edge systems.
A complementary research line focuses on efficiency of MDE solutions, aiming to make MDE feasible under limited compute, memory, and power budgets. Compact encoders based on depthwise separable convolutions and inverted residual blocks (e.g., MobileNetV2) are common starting points for embedded-friendly designs [9]. Hybrid mobile backbones further integrate lightweight self-attention: MobileViT [8] combines local convolutions with transformer blocks operating on small patch sequences. For self-supervised settings on edge devices, Lite-Mono [27] demonstrates that a careful CNN-transformer hybrid can retain accuracy with substantially fewer parameters.
Beyond backbones, decoder design and feature fusion strongly impact compact models. Lightweight feature recalibration mechanisms such as concurrent spatial and channel squeeze-excitation (scSE) [10] improve skip fusion by emphasizing informative channels and spatial locations. Guided decoding strategies [28] filter or gate skip connections before fusion, improving the balance between global bottleneck context and local detail while remaining efficient.
Among lightweight supervised MDE approaches, METER [11] is a key reference for this work. METER targets embedded platforms by combining a MobileViT-style encoder with a light decoder and a training pipeline designed for efficient monocular depth estimation, reporting strong results on NYU Depth v2 [5]. Moreover, it proved to be an adaptable baseline for further optimizations [29–31].
Training objectives and supervision paradigms. Most supervised MDE pipelines treat depth as dense regression and optimize point-wise losses (e.g.,
Positioning of this work. High-capacity transformer and foundation-style models [2,21] demonstrate the benefits of strong global context and large-scale training, but are typically designed for higher resolutions and larger compute budgets. Lightweight hybrids based on MobileNet family models [37], MobileViT [8], and METER [11] show that useful depth maps can be obtained under tighter constraints, but generally still assume medium-resolution inputs. In this work, we focus on the low resolution regime (
3.1 Problem Formulation and Notation
We consider supervised monocular depth estimation from a single RGB image. Given an RGB input
Before introducing DeepEchoNet, we summarize the baselines used in this work to compare our solution. Both baselines are lightweight encoder-decoder networks built on MobileViT-style encoders [8,11] and adapted to operate directly at low input resolution.
METER-S METER follows an encoder-decoder design with skip connections. The encoder alternates MobileNetV2-style inverted residual blocks [9] with MobileViT blocks [8], enabling efficient local feature extraction and lightweight global context modeling. The decoder fuses multi-scale features through lightweight upsampling and skip connections, producing a dense depth map. In this work, METER-S is adopted both as the primary lightweight reference model [11] and as the starting architecture upon which our framework is built.
MobileViT_Base In addition to METER, we introduce another baseline MobileViT-inspired model (MobileViT_Base) that simplifies the encoder and restructures the decoder to better match the spatial scales encountered in the low resolution regime. This baseline helps isolate architectural choices that matter most when operating at
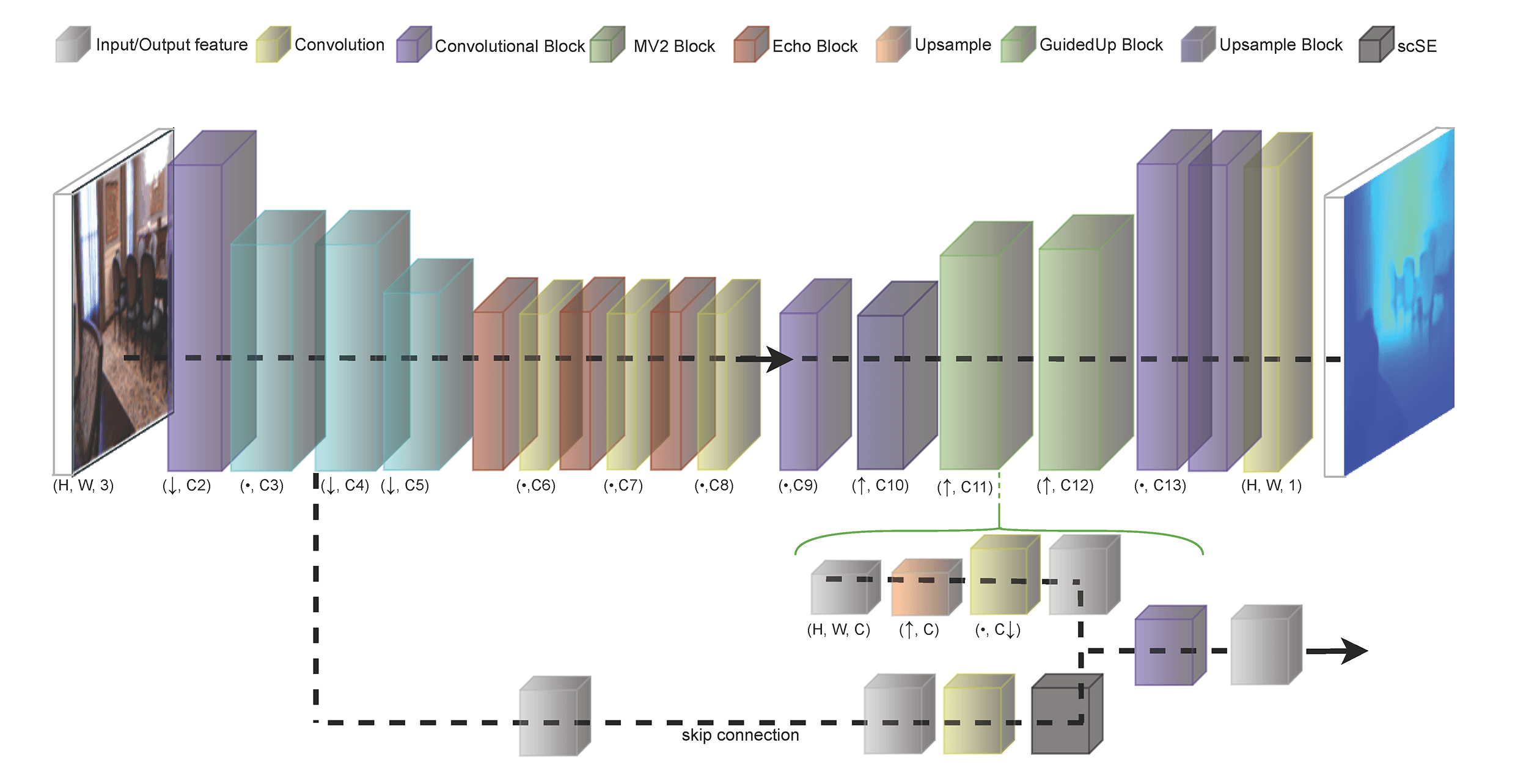
DeepEchoNet targets monocular depth estimation at native resolutions of 96

Figure 1: Overview of the DeepEchoNet architecture. The encoder combines MobileNetV2 downsampling [9] with three MobileViT-Echo blocks [8] to produce a compact
The DeepEchoNet encoder is a MobileViT-inspired backbone designed for low resolution inputs. Given a
1. Convolutional stem. A first convolutional block (conv1) with stride
2. Inverted residual blocks. Three MobileNetV2-style inverted residual blocks [9] progressively increase capacity while downsampling:
• mv2_1:
• mv2_2:
• mv2_3:
Each block uses an expansion factor to form a depthwise separable convolutional core, followed by a linear projection back to the output channels, and employs residual connections when shapes match [9].
3. MobileViT stages with bridges. Starting from the
• mvit1:
• bridge12:
• mvit2:
• bridge23:
• mvit3:
Each MobileViT block refines features locally via convolutions, projects them to a latent dimension, unfolds into small
4. Bottleneck projection. A final
In addition to the bottleneck, the encoder exposes intermediate feature maps that act as skip connections in the decoder, enabling multi-scale reconstruction while preserving low-level structure despite the limited spatial resolution.
3.3.2 Guided Decoder and Skip Fusion
The decoder reconstructs a dense depth map at
Concretely, the decoder first applies a
1. Decoder projection: bilinearly upsample the current decoder feature and project it to
2. Skip recalibration: project the corresponding skip feature to
3. Fusion: concatenate the projected decoder and recalibrated skip features and fuse them with a separable convolution + BN + ReLU [9].
After reaching
DeepEchoNet is trained in a fully supervised fashion using the balanced loss function (BLF) introduced in METER, with an added, custom Gradient-based edge loss. The goal is to combine a robust pixel-wise depth regression term with additional components that promote sharp edges, geometrically consistent surfaces, and structural similarity between predicted and ground-truth depth maps.
Let
where
Depth regression term
A primary component is a pixel-wise
where
Gradient-based edge loss
To emphasize depth discontinuities and small structures, we include a gradient consistency term inspired by supervised MDE objectives [1,11,39]. Both predicted and ground-truth depth maps are passed through a fixed Sobel operator to obtain horizontal and vertical gradients, and their differences are penalized:
This encourages the predicted depth map to share the same edge structure as the ground truth, reducing over-smoothed boundaries. Surface normals are approximated from depth gradients:
and a cosine penalty is applied:
promoting geometrically consistent surfaces.
Structural similarity
To encourage structural agreement between depth maps, a structural similarity term is included:
where
3.5 Low Resolution Pre-Processing and Augmentation
RGB images are loaded and converted into 8bit, 3 channels tensors and normalized between [0, 1]. Depth maps may be stored as 8- or 16-bit images; 16-bit depth values are converted to centimeters, while 8-bit depth is linearly mapped to [0, 1000] cm. All depth values are clipped to

Figure 2: Qualitative illustration of the joint RGB–depth augmentation pipeline. The first row shows the original RGB image together with two perturbed variants produced by the shifting strategy (gamma/brightness/color scaling). The second row displays the corresponding ground-truth depth maps, where an additional depth shift
We apply a compact set of geometric and appearance perturbations:
• Flips: vertical and horizontal flips are applied with fixed probabilities.
• Channel swap: with a fixed probability, RGB channels are randomly permuted to reduce sensitivity to color statistics.
• Shifting strategy (in the spirit of [11]): with probability
• Strong-to-weak schedule: during the first half of training we additionally enable a small shared affine transform (rotation
All experiments are conducted on the NYU Depth v2 indoor dataset [5], which provides aligned RGB images and depth maps acquired with an RGB-D sensor. In order to perform fair comparison, we adopted the standard evaluation protocol widely used in monocular depth estimation (employed also by our baseline comparison model, METER [11]), with a training set of more than 50,000 RGB-depth pairs and a held-out test set containing 654 images, taken from the NYU Depth v2 dataset.
In addition, we report a cross-dataset evaluation on SUN RGB-D [42] to assess robustness under domain shift, excluding the NYU subset contained in SUN RGB-D.
4.2 Preprocessing and Low Resolution Inputs
We operate in an low resolution regime, resizing RGB and depth to
4.3 Training Protocol and Hyperparameters
All models are trained in a fully supervised fashion using the balanced loss function in Section 3.4 (point-wise
We use the AdamW optimizer [43] with learning rate
Metrics are computed over valid pixels
4.5 Hardware and Inference-Time Measurement
Unless otherwise specified, all experiments are run on a Linux workstation equipped with a single NVIDIA GeForce RTX 4070 SUPER GPU and PyTorch framework. The code is publicly available on the Github webpage https://github.com/giuliocapo/DeepEchoNet.
Inference-time measurements are reported in a model-only setting, i.e., we measure the forward-pass latency excluding dataset I/O and preprocessing. Each model is timed with batch size
All reported FPS values refer to this single-image, single-GPU setting.
5.1.1 Comparison with Baseline Models
We compare DeepEchoNet with two MobileVIT models at the same input resolution. More in detail, our comparison includes: (i) METER-S adapted to
The comparison results are shown in Table 1. Although MobileViT_Base is more compact than METER-S, its performance is slightly worse across all error metrics (e.g., AbsRel 0.205 vs. 0.195, RMSE 69.00 vs. 67.49 cm, and MAE 52.53 vs. 51.92 cm), indicating that reshaping the architectural hierarchy to match low resolution scales is not sufficient by itself. This trend is also reflected in the accuracy thresholds, where MobileViT_Base shows marginally lower
In contrast, DeepEchoNet achieves the best overall accuracy. AbsRel is reduced to 0.186, while RMSE and MAE decrease to 63.56 and 48.18 cm, respectively, indicating improvements both in global error and average per-pixel deviation. Moreover,
Regarding inference times, DeepEchoNet improves runtime performance with respect to the main baseline METER-S, reaching approximately 240 FPS compared to 220 FPS. This demonstrates that the proposed architectural refinements not only enhance accuracy but also lead to faster inference. The fastest model remains MobileViT_Base at approximately 280 FPS, reflecting the expected trade-off between extreme compactness and depth estimation accuracy.
5.1.2 Cross-Dataset Robustness on SUN RGB-D
We added a cross-dataset robustness evaluation on SUN RGB-D [42] to assess generalization beyond NYU Depth v2. Since SUN RGB-D is not provided with an official test split for monocular depth estimation, we randomly sampled 600 frames (fixed seed), excluding the NYU subset included in SUN RGB-D to prevent any overlap with the training distribution. Depth maps were decoded following the official SUNRGBD toolbox (bit operation + metric conversion) and evaluation was limited to the 0.5–8 m range (consistent with the toolbox clipping). As expected, all models exhibit a domain-shift degradation; however, Table 2 shows that DeepEchoNet consistently outperforms both the adapted METER-S baseline and the MobileViT_Base baseline on RMSE/MAE and


Figure 3: Qualitative comparison on SUN RGB-D: DeepEchoNet vs. METER-S. From left to right, the images are the input RGB, the ground truth, the DeepEchoNet prediction and the METER-S prediction respectively. In particular, DeepEchoNet produces predictions with sharper details with respect to METER-S.
5.1.3 Noise Sensitivity on NYU Depth v2
We further test robustness to input perturbations on DeepEchoNet by adding zero-mean Gaussian noise with standard deviation

In addition, Fig. 4 reports a challenging indoor scene with heavy clutter and repeated fine-scale structures, where monocular cues become less informative at

Figure 4: Qualitative example on NYU Depth v2 under additive Gaussian RGB noise (
To better understand which design choices contribute most to the final performance, we perform ablation experiments deactivating several DeepEchoNet modules. Unless otherwise noted, variants are trained from scratch on NYU Depth v2 [5] with the same optimiser, learning-rate scheduler, and base augmentation pipeline; differences concern architecture or loss configuration.
The first block of Table 4 isolates the contribution of architecture and augmentation (enabled for all experiments, but “no-agumentation” one). Adding the guided decoder improves performance (AbsRel 0.205

The second block summarises additional variants, taken from most popular MDE models, that proved to not improve accuracy in this setting. In particular, Auxiliary multi-scale heads combined with a scale-invariant log loss (SI-Log) [1] yield worse metrics and tend to produce over-regularised predictions. A focal re-weighting of the
To improve transparency on training dynamics, Fig. 5 reports the training loss, validation AbsRel, and the learning-rate evolution under ReduceLROnPlateau for the final DeepEchoNet configuration. The curves show stable convergence without divergence, and learning-rate reductions align with validation plateaus; we select the final checkpoint by validation AbsRel. Sensitivity to the loss design and augmentation strength is further discussed via the ablation study (Table 4), where more complex loss variants do not yield consistent gains, while the strong-to-weak augmentation schedule provides a measurable improvement.

Figure 5: Training and validation curves for the final DeepEchoNet configuration on NYU Depth v2 at
Quantitative metrics provide a compact summary but are not enough to fully capture the perceptual quality of the predicted depth maps. We therefore report qualitative examples on NYU Depth v2 [5]. All depth predictions are single-channel real-valued maps. For qualitative visualisation, both ground-truth and predicted depth maps are clamped to a fixed depth range, linearly normalised to [0, 1], and mapped to RGB using a perceptually uniform sequential colormap. Despite the extremely low input resolution, DeepEchoNet recovers the main planar structures of indoor scenes (walls, floor, large furniture) and delineates many object boundaries and depth discontinuities (Fig. 6).

Figure 6: Qualitative examples of DeepEchoNet predictions on NYU Depth v2 at
A direct depth-map comparison for the same test image is shown in Fig. 7. Consistently with the quantitative analysis, DeepEchoNet produces sharper boundaries and fewer artefacts along depth discontinuities than the baselines.

Figure 7: Direct comparison of predicted depth maps for the same NYU Depth v2 scene at
Finally, Fig. 8 illustrates typical failure modes for the auxiliary multi-scale + SI-Log variant: predictions become over-regularised and overly smooth, with biased estimates on reflective surfaces, textureless regions, and strong occlusions, where monocular cues are intrinsically ambiguous in the low resolution regime [1].

Figure 8: Failure cases on NYU Depth v2 for the auxiliary multi-scale + SI-Log variant, showing over-regularised (oversmoothed) predictions in challenging regions. Larger depths are brighter, smaller depths are darker.
To further characterise the limitations of the final DeepEchoNet model, we additionally report an example of failure case of depth estimation on NYU Depth v2 on Fig. 9. The sample scene is highly cluttered (book stacks and shelves) and contains many small, overlapping objects with sharp depth discontinuities. In this setting, the low resolution regime amplifies the ambiguity of monocular cues: fine structures and thin depth layers are easily lost, and the prediction tends to become over-smoothed. In fact, DeepEchoNet captures the coarse layout but struggles to preserve fine-grained depth transitions under heavy occlusions, leading to a large error in this outlier case. We note, however, that attributing prediction errors to specific image structures in a strictly causal or quantitative manner remains challenging, as current analysis tools for deep models do not provide definitive mechanisms for isolating the exact factors responsible for individual failure modes. Therefore, our analysis is based on consistent empirical trends observed across high-error samples rather than formal causal attribution.

Figure 9: Failure case qualitative example on NYU Depth v2 for the final DeepEchoNet model (selected by per-image RMSE). From left to right: RGB input, DeepEchoNet prediction, and ground-truth depth. Depth maps are clamped to a fixed range, linearly normalised to
The experimental analysis supports the following conclusions for low resolution MDE. First, simply adapting existing architectures to
These findings are also reflected in the observed failure modes (Figs. 8 and 9), where errors concentrate in regions requiring fine spatial detail, sharp depth discontinuities, or involving thin and cluttered structures. While such patterns are consistent across high-error samples, providing a more rigorous attribution of these errors to specific input cues remains challenging due to the lack of interpretability techniques. In particular, existing explainability (XAI) methods are not well suited to dense regression tasks such as monocular depth estimation. Algorithms such as Grad-CAM [44], originally developed for classification, require defining an attribution target, which is inherently ambiguous in the case of per-pixel continuous predictions. Developing principled explainability methods for dense depth prediction would therefore be instrumental in better understanding these effects, and represents a promising direction for future work.
This work addressed supervised monocular depth estimation (MDE) in an low resolution regime, where the input is a single RGB image downsampled to
Acknowledgement: Not applicable.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Giulio Caporro, Paolo Russo; data collection: Giulio Caporro; analysis and interpretation of the results: Giulio Caporro, Paolo Russo; draft manuscript preparation: Giulio Caporro, Paolo Russo. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Eigen D, Puhrsch C, Fergus R. Depth map prediction from a single image using a multi-scale deep network. Adv Neural Inf Process Syst. 2014;2:2366–74. [Google Scholar]
2. Ranftl R, Bochkovskiy A, Koltun V. Vision transformers for dense prediction. In: Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV); 2021 Oct 10–17; Montreal, QC, Canada. p. 12179–88. doi:10.1109/iccv48922.2021.01196. [Google Scholar] [CrossRef]
3. Liu Z, Lin Y, Cao Y, Hu H, Wei Y, Zhang Z, et al. Swin transformer: hierarchical vision transformer using shifted windows. In: Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV); 2021 Oct 10–17; Montreal, QC, Canada. p. 10012–22. doi:10.1109/iccv48922.2021.00986. [Google Scholar] [CrossRef]
4. Yin W, Zhang J, Wang O, Niklaus S, Mai L, Chen S, et al. Learning to recover 3D scene shape from a single image. In: Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2021 Jun 20–25; Nashville, TN, USA. p. 204–13. doi:10.1109/cvpr46437.2021.00027. [Google Scholar] [CrossRef]
5. Silberman N, Hoiem D, Kohli P, Fergus R. Indoor segmentation and support inference from RGBD images. In: Computer vision—ECCV 2012. Berlin/Heidelberg, Germany: Springer; 2012. p. 746–60. doi:10.1007/978-3-642-33715-4_54. [Google Scholar] [CrossRef]
6. Dosovitskiy A, Beyer L, Kolesnikov A, Weissenborn D, Zhai X, Unterthiner T, et al. An image is worth 16 × 16 words: transformers for image recognition at scale. arXiv:201011929. 2020. [Google Scholar]
7. Di Ciaccio F, Russo P, Troisi S. Does: a deep learning-based approach to estimate roll and pitch at sea. IEEE Access. 2022;10:29307–21. [Google Scholar]
8. Mehta S, Rastegari M. Mobilevit: light-weight, general-purpose, and mobile-friendly vision transformer. arXiv:211002178. 2021. [Google Scholar]
9. Sandler M, Howard A, Zhu M, Zhmoginov A, Chen LC. MobileNetV2: inverted residuals and linear bottlenecks. In: Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2018 Jun 18–23; Salt Lake City, UT, USA. 1 p. doi:10.1109/cvpr.2018.00474. [Google Scholar] [CrossRef]
10. Roy AG, Navab N, Wachinger C. Concurrent spatial and channel ‘squeeze & excitation’ in fully convolutional networks. In: Medical image computing and computer assisted intervention—MICCAI 2018. Cham, Switzerland: Springer International Publishing; 2018. p. 421–9. doi:10.1007/978-3-030-00928-1_48. [Google Scholar] [CrossRef]
11. Papa L, Russo P, Amerini I. METER: a mobile vision transformer architecture for monocular depth estimation. IEEE Trans Circuits Syst Video Technol. 2023;33(10):5882–93. doi:10.1109/tcsvt.2023.3260310. [Google Scholar] [CrossRef]
12. Ronneberger O, Fischer P, Brox T. U-Net: convolutional networks for biomedical image segmentation. In: Medical image computing and computer-assisted intervention—MICCAI 2015. Cham, Switzerland: Springer International Publishing; 2015. p. 234–41. doi:10.1007/978-3-319-24574-4_28. [Google Scholar] [CrossRef]
13. Chen LC, Zhu Y, Papandreou G, Schroff F, Adam H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In: Computer vision—ECCV 2018. Cham, Switzerland: Springer International Publishing; 2018. p. 833–51. doi:10.1007/978-3-030-01234-2_49. [Google Scholar] [CrossRef]
14. Yuan W, Gu X, Dai Z, Zhu S, Tan P. Neural window fully-connected CRFs for monocular depth estimation. In: Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2022 Jun 18–24; New Orleans, LA, USA. p. 3916–25. doi:10.1109/cvpr52688.2022.00389. [Google Scholar] [CrossRef]
15. Kim D, Ka W, Ahn P, Joo D, Chun S, Kim J. Global-local path networks for monocular depth estimation with vertical CutDepth. arXiv:220107436. 2022. [Google Scholar]
16. Bhat SF, Alhashim I, Wonka P. Adabins: depth estimation using adaptive bins. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2021 Jun 20–25; Nashville, TN, USA. p. 4009–18. [Google Scholar]
17. Bhat SF, Alhashim I, Wonka P. LocalBins: improving depth estimation by learning local distributions. In: Computer vision—ECCV 2022. Cham, Switzerland: Springer Nature; 2022. p. 480–96. doi:10.1007/978-3-031-19769-7_28. [Google Scholar] [CrossRef]
18. Agarwal A, Arora C. Attention attention everywhere: monocular depth prediction with skip attention. In: Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV); 2023 Jan 2–7; Waikoloa, HI, USA. p. 5861–70. doi:10.1109/wacv56688.2023.00581. [Google Scholar] [CrossRef]
19. Birkl R, Wofk D, Müller M. Midas v3. 1-a model zoo for robust monocular relative depth estimation. arXiv:230714460. 2023. [Google Scholar]
20. Bhat SF, Birkl R, Wofk D, Wonka P, Müller M. Zoedepth: zero-shot transfer by combining relative and metric depth. arXiv:230212288. 2023. [Google Scholar]
21. Yang L, Kang B, Huang Z, Xu X, Feng J, Zhao H. Depth anything: unleashing the power of large-scale unlabeled data. In: Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2024 Jun 16–22; Seattle, WA, USA. p. 10371–81. doi:10.1109/cvpr52733.2024.00987. [Google Scholar] [CrossRef]
22. Papa L, Russo P, Amerini I. D4D: an RGBD diffusion model to boost monocular depth estimation. IEEE Trans Circuits Syst Video Technol. 2024;34(10):9852–65. doi:10.1109/tcsvt.2024.3404256. [Google Scholar] [CrossRef]
23. Vasu PKA, Gabriel J, Zhu J, Tuzel O, Ranjan A. MobileOne: an improved one millisecond mobile backbone. In: Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2023 Jun 17–24; Vancouver, BC, Canada. p. 7907–17. doi:10.1109/cvpr52729.2023.00764. [Google Scholar] [CrossRef]
24. Xiong Y, Liu H, Gupta S, Akin B, Bender G, Wang Y, et al. MobileDets: searching for object detection architectures for mobile accelerators. In: Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2021 Jun 20–25; Nashville, TN, USA. p. 3825–34. doi:10.1109/cvpr46437.2021.00382. [Google Scholar] [CrossRef]
25. Pan J, Bulat A, Tan F, Zhu X, Dudziak L, Li H, et al. EdgeViTs: competing light-weight CNNs onMobile devices withVision transformers. In: Computer vision—ECCV 2022. Cham, Switzerland: Springer; 2022. p. 294–311. doi:10.1007/978-3-031-20083-0_18. [Google Scholar] [CrossRef]
26. Setyawan N, Sun CC, Hsu MH, Kuo WK, Hsieh JW. MicroViT: a vision transformer with low complexity self attention for edge device. In: Proceedings of the 2025 IEEE International Symposium on Circuits and Systems (ISCAS); 2025 May 25–28; London, UK. p. 1–5. doi:10.1109/iscas56072.2025.11043206. [Google Scholar] [CrossRef]
27. Zhang N, Nex F, Vosselman G, Kerle N. Lite-mono: a lightweight CNN and transformer architecture for self-supervised monocular depth estimation. In: Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2023 Jun 17–24; Vancouver, BC, Canada. p. 18537–46. doi:10.1109/cvpr52729.2023.01778. [Google Scholar] [CrossRef]
28. Rudolph M, Dawoud Y, Guldenring R, Nalpantidis L, Belagiannis V. Lightweight monocular depth estimation through guided decoding. In: Proceedings of the 2022 International Conference on Robotics and Automation (ICRA); 2022 May 23–27; Philadelphia, PA, USA. p. 2344–50. doi:10.1109/icra46639.2022.9812220. [Google Scholar] [CrossRef]
29. Schiavella C, Cirillo L, Papa L, Russo P, Amerini I. Optimize vision transformer architecture via efficient attention modules: a study on the monocular depth estimation task. In: Image analysis and processing—ICIAP 2023 workshops. Cham, Switzerland: Springer Nature; 2024. p. 383–94. doi:10.1007/978-3-031-51023-6_32. [Google Scholar] [CrossRef]
30. Schiavella C, Cirillo L, Papa L, Russo P, Amerini I. Efficient attention vision transformers for monocular depth estimation on resource-limited hardware. Sci Rep. 2025;15(1):24001. doi:10.1038/s41598-025-06112-8. [Google Scholar] [PubMed] [CrossRef]
31. Cirillo L, Schiavella C, Papa L, Russo P, Amerini I. Shedding light on depth: explainability assessment in monocular depth estimation. In: Proceedings of the 2025 International Joint Conference on Neural Networks (IJCNN); 2025 Jun 30–Jul 5; Rome, Italy. p. 1–8. doi:10.1109/ijcnn64981.2025.11228948. [Google Scholar] [CrossRef]
32. Wang Z, Bovik AC, Sheikh HR, Simoncelli EP. Image quality assessment: from error visibility to structural similarity. IEEE Trans Image Process. 2004;13(4):600–12. doi:10.1109/tip.2003.819861. [Google Scholar] [CrossRef]
33. Watson J, Mac Aodha O, Prisacariu V, Brostow G, Firman M. The temporal opportunist: self-supervised multi-frame monocular depth. In: Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); 2021 Jun 20–25; Nashville, TN, USA. p. 1164–74. doi:10.1109/cvpr46437.2021.00122. [Google Scholar] [CrossRef]
34. Lin TY, Goyal P, Girshick R, He K, Dollar P. Focal loss for dense object detection. In: Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV); 2017 Oct 22–29; Venice, Italy. p. 2980–8. doi:10.1109/iccv.2017.324. [Google Scholar] [CrossRef]
35. Shazeer N. Glu variants improve transformer. arXiv:200205202. 2020. [Google Scholar]
36. Saxena S, Kar A, Norouzi M, Fleet DJ. Monocular depth estimation using diffusion models. arXiv:230214816. 2023. [Google Scholar]
37. Qian S, Ning C, Hu Y. MobileNetV3 for image classification. In: Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE); 2021 Mar 26–28; Nanchang, China. p. 490–7. doi:10.1109/icbaie52039.2021.9389905. [Google Scholar] [CrossRef]
38. Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez AN, et al. Attention is all you need. Adv Neural Inf Process Syst. 2017;30:6000–10. doi:10.65215/ctdc8e75. [Google Scholar] [CrossRef]
39. Laina I, Rupprecht C, Belagiannis V, Tombari F, Navab N. Deeper depth prediction with fully convolutional residual networks. In: Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV); 2016 Oct 25–28; Stanford, CA, USA. doi:10.1109/3dv.2016.32. [Google Scholar] [PubMed] [CrossRef]
40. Godard C, Mac Aodha O, Brostow GJ. Unsupervised monocular depth estimation with left-right consistency. In: Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); 2017 Jul 21–26; Honolulu, HI, USA. p. 270–9. doi:10.1109/cvpr.2017.699. [Google Scholar] [CrossRef]
41. Krizhevsky A, Sutskever I, Hinton GE. ImageNet classification with deep convolutional neural networks. Commun ACM. 2017;60(6):84–90. doi:10.1145/3065386. [Google Scholar] [CrossRef]
42. Song S, Lichtenberg SP, Xiao J. SUN RGB-D: a RGB-D scene understanding benchmark suite. In: Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); 2015 Jun 7–12; Boston, MA, USA. p. 567–76. doi:10.1109/cvpr.2015.7298655. [Google Scholar] [CrossRef]
43. Loshchilov I, Hutter F. Decoupled weight decay regularization. arXiv:171105101. 2017. [Google Scholar]
44. Selvaraju RR, Cogswell M, Das A, Vedantam R, Parikh D, Batra D. Grad-CAM: visual explanations from deep networks via gradient-based localization. In: Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV); 2017 Oct 22–29; Venice, Italy. p. 618–26. doi:10.1109/iccv.2017.74. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools